Mesterséges Intelligencia MI
|
|
|
- Mátyás Balla
- 8 évvel ezelőtt
- Látták:
Átírás
1 Mesterséges Intelligencia MI Problémamegoldás kereséssel Dobrowiecki Tadeusz Eredics Péter, és mások BME I.E. 437,

2 optimális pályahossz = 7

3


4 Fizikai tér
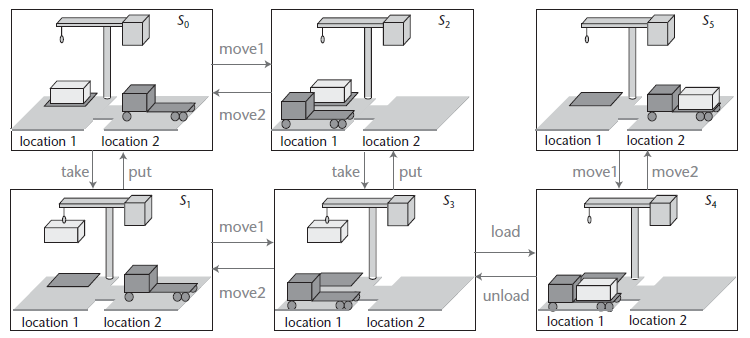
5 Konfigurációs tér


6 Absztrakt tér
7 A reflexszerű ágens tervezője tervezés közben keresett. Reflexszerű ágensnek működés közben már nem kell keresnie. Célorientált ágens tervezője tervezés közben nem keresett. Célorientált ágens működése közben kénytelen maga keresni (kereséssel megoldani a problémáit).
8 A most kezdődő anyagrész kérdései Mik a problémamegoldás lépései? Hogyan lehet problémákat jól definiálni? Hogyan mérhető a problémamegoldó hatékonyság? Milyen keresési stratégiák állnak rendelkezésre? Milyen tanulságok vonhatók le ezek komplexitásából? Mivel tudjuk mérsékelni a módszerek komplexitását? Hogyan terjeszthetők e módszerek nehezebb környezetekre?
9 Manapság mindenki utazik, gépkocsival, repülővel, Keressünk pénzt útvonaltervező szoftver fejlesztésével! A (helyettünk intelligens) rendszer kap két helyszínt, tudja a mozgási (utazási) lehetőségeket, dolgozik, és kiad egy úttervet. Sima ügy. Miért? A probléma nem más, mint egy gráfban melynek élei súlyozottak - élutat találni két csomópont között. Gráfokat tanultunk, keresést tanultunk, optimális út megkeresését is tanultuk. Pontosabban mit is tanultunk? Előzmények: gráf, csomópont, él, út, fa, útkeresés, keresési fa, mélységi keresés, szélességi keresés, élsúly, optimális út keresése, Dijkstra-algoritmus, komplexitás, időkomplexitás, tárkomplexitás, és most innen kezdjünk...
10 Dijkstra-algoritmus

11 Mi a probléma? Dijkstra az egy másik és még egy másik


12 Teljes USA úthálózat 24M csúcs, 58M él 1.6M csúcs 3.8M él
13 Problémák: gráfméret - milliós csomópontok, sűrű kiszolgálás Hatékonyságban különbségek, hogyan mérünk? Komplexitás: idő-, tár-, pl. mélységi keresés, szélességi keresés,... Dijkstra mennyi? Bontás kisebb gráfokra, menni fog? Egyedi, nem ismételt feladatnál? Ez sok, vagy kevés? Menni fog? És ha a kiszolgálások tömegesek, helyileg előre ismeretlenek? Ha ilyen sok kiszolgálás közben változnak az objektív körülmények (gráf alakja, élsúlyok, )? Ha a gráf előre nem adható meg (csak pici részletben a kiindulás környezetében)? A tanult dolgokhoz képest nagyon sok kérdés, ami a módszerek tényleges használhatóságával kapcsolatos.
14 Példa: tili-toli (kirakó) játék, szélességi kereséssel a szg. Tianhe-1A (2015), 2.5 Pflops, 260 Tbyte tár, 2 Pbyte diszk (4 MW, 20 m$/év, 200 fős személyzet) legyen 1 csp 1 flop, 100 byte Méret Csomópont (kb.) Idő Tár Lépés 8-as (3 x 3) psec 10 Mbyte < ös (4 x 4) msec 100 Tbyte < es (5 x 5) év 1000 Ybyte 152 < < ös (6 x 6) Eév?? T(era) = 10 12, P(eta) = 10 15, E(xa) = 10 18, Z(etta) = 10 21, Y(otta) = (a világűr kora kb. csak 14 Gév) Legrövidebb megoldás megkeresése: NP teljes
15 Absztrakció módja = a jól definiált probléma megalkotása Probléma = információk gyűjteménye: (hiedelmi) állapotok + legális cselekvések Formálisan: (1) kiinduló állapot (ágensnek tudnia kell, hogy abban az állapotban van) (2) ágens által rendelkezett lehetséges cselekvések halmaza operátor = egy-egy cselekvés leírása, tipikusan HA egy ilyen állapotban van, AKKOR majd olyan állapotban lesz a cselekvés alkalmazása után követő állapot függvény = egy cselekvés egy adott állapotban való alkalmazásának hatására az ágens mely állapotba kerül? ezek együtt (implicit módon megadva): a probléma állapottere: azon állapotok halmaza, amelyek a kiinduló állapotból valamilyen cselekvés sorozattal elérhetők. (nehézség: az állapottér explicite ritkán adható meg) (sakk) állapottérben út: állapotok között vezető cselekvéssorozat
16 (3) célteszt: az ágens el tudja dönteni, hogy az egy célállapot-e. a. a lehetséges célállapotok egy explicit halmaza - egyszerűen megnézi, hogy az ágens elérte-e ezek egyikét b. a cél valamilyen absztrakt tulajdonsággal van definiálva, pl. a sakkban az ún. sakk-matt helyzet (4) útköltség függvény: az úthoz hozzárendel egy költséget A keresési algoritmus kimenete - egy megoldás: a kiinduló állapotból egy olyan állapotba vezető út, amely teljesíti a cél tesztet. A problémamegoldó hatékonyság mérése Keresés: 1. Egyáltalán talál-e megoldást. 2. A megtalált megoldás jó-e (egy alacsony útköltségű megoldás-e)? 3. Mi a megoldás megtalálásához szükséges (idő/ tár) keresési költség? A keresés összköltsége: az útköltség + a keresési költség (!) avagy egy racionális ágens számára a probléma megoldásának költsége a probléma megoldásának számítási költsége ÉS a problémamegoldás végrehajtási költsége EGYÜTTESEN
17 Mi kell? Tárból, időből levenni, de a megoldásra garanciát adni (a menyasszony legyen szép, okos, és gazdag). Felejtsük el! De valamiből mindig le kell adni. Levenni időigényből (időkomplexitásból), levenni tárból, jó lenne levenni mindkettőből = kevesebb átnézett csomópont! Mi is a helyzet a mélységi és a szélességi kereséssel? Garancia és gyorsaság együtt nem fog menni. Ha garancia nagyon kell, meg kell enni a békát. Garancia nélkül, csak ha jó a tapasztalat, vagy ha nagyon gyors az eszköz, mert ha kudarcba fullad, van még idő megismételni. Szólaltassuk a mérnöki kreativitást!
18 (1) Büntessük a hátrakeresést. (A*, stb.) (2) Keressünk mindkét irányból. (kétirányú) (3) Ügyesen alkalmazzuk a mélységi keresést. (iteratív) (4) Alkalmazzuk a gráf előfeldolgozását (problémát alakítsuk át egyszerűbbé, de ennek ára van). (ALT landmarks) (5) Eleve tervezzük be a kicsi memóriát. (EMA*) (6) Teljesen mondjunk le a visszalépésekről. (hegymászás) (7) Engedélyezzük a nem a legjobb lépéseket is. (nyaláb keresés) (8) Engedélyezzünk rossz lépéseket is. (szimulált lehűtés) (9) Tiltsunk egyes potenciálisan rossz lépéseket. (tabú keresés) (10) Folyamatosan profitáljunk az eddigi megoldásokból. (tanuló A*, anytime A*, stb.) (11) Randomizáljuk és ismételjük. (12) Maradjunk keresni az eredeti folytonos térben....
19 Legyen pl. az a probléma, hogy...
20 Milyen utat találunk meg? Így?
21 Milyen utat találunk meg? Vagy úgy?
22 Formalizált probléma Kezdeti állapot = Arad Célállapot = Bukarest Operátorok: IF (X és (X > Y)) THEN Y Útköltség = k x táv(x,y) + Célállapot teszt: Y = Célállapot? Nehézségek becslése:? Adatbázis: (Arad > Nagyzerend) táv(arad,nagyzerend) = 75 (Arad > Temesvár) táv(arad,temesvár) =
23 Keresési stratégiák avagy miből gazdálkodhatunk? mire vagyunk képesek? milyen körülöttünk a környezet? Nem informált keresések (un. gyenge, vagy vak keresés) tudjuk: hogy néz ki a célállapot esetleg tudjuk: mibe kerül cselekedni egyáltalán nem: milyen költségű az aktuálisból a célállapotba vezető út (avagy merre van a cél?) Informált keresések = heurisztikus keresések tudjuk: hogy néz ki a célállapot tudjuk: milyen költségű lehet az aktuális állapotból a célállapotba vezető út (avagy merre van a cél) esetleg tudjuk: mibe kerül cselekedni... útkeresés: Aradból kiindulva 3 cselekvés Szebenbe, Temesvárra és Nagyzerendre vezet nem informált keresés: nincs különbség, merre... informált, okosabb ágens: Szeben a célállapot irányában fekszik... A vak keresési stratégiákat a csomópontok kifejtési sorrendje különbözteti meg. Ez a különbség óriási jelentőséggel bírhat.
24 Mélységi keresés (Ro-Melysegi-K.pdf) rohanás előre, egy ág mentén, de a visszalépés lehetőségével Szélességi keresés (Ro-SzelessegiK.pdf) szisztematikus feltárás széles fronton, a visszalépésre nincs szükség (nincs is mihez) Mélységkorlátozott keresés az utak maximális mélységére egy vágási korlátot ad. (Ro-MelysegKorlatosK.pdf) Románia térképe: 20 város. Ha létezik egy megoldás, az maximálisan 19 lépés hosszú lehet! De minden város bármelyik városból legfeljebb 9 lépésben elérhető: az állapottér átmérője = jobb mélységkorlát. A mélységi levágásnál a keresés visszalép. A megoldást, amennyiben létezik és a mélységkorlátnál sekélyebben fekszik, garantáltan megtaláljuk. De semmi garancia nincs arra, hogy a legrövidebb megoldást találjuk meg. Amennyiben túl kis mélységkorlátot választunk, akkor a mélységkorlátozott keresés még csak teljes sem lesz.
25 Iteratívan mélyülő keresés Slate és Atkin (1977): CHESS 4.5 sakkprogram. (Ro-IterativMelyulo-K.pdf) A legjobb mélységkorlát kiválasztása: - kipróbálni az összest! Először 0, majd 1, 2, stb. - mélységkorláttal végez mélységkorlátozott keresést. Ötvözi a szélességi és mélységi keresés előnyeit: optimális és teljes, de a mélységi keresés kis memória igényével rendelkezik. Tékozló? egy exponenciális keresési fában majdnem az összes csomópont a legmélyebb szinten van, d mélység, b elágazási tényező: szélességi keresés - a kifejtések száma: 1 + b + b b d-2 + b d-1 + b d pl. b =10 és d = 5 esetén ez a szám: = az iteratívan mélyülő keresés - a kifejtések száma: (d+1)1 + (d)b + (d -1)b b d-2 + 2b d-1 + 1b d b = 10 és d = 5 esetén: = minél nagyobb a b, annál kisebb a többletmunka (max. b = 2, 200%)
26 Kétirányú keresés (Ro-Ketiranyu-K.pdf) - egyszerre előrefelé a kiinduló állapotból, illetve hátrafelé a cél állapotból - a keresés akkor fejeződik be, ha a két keresés valahol találkozik O(2 x b d/2 )=O(b d/2 ) b = 10, d = 6: a szélességi keresés = csomópont, a kétirányú keresés = 2222 csomópont. Cél állapotból hátrafelé keresni? Az n csomópont előd csomópontjai azon csomópontok, amelyek követő csomópontja n. Ha az operátorok reverzibilisek, akkor az előd és követő halmazok azonosak. Mi van, ha nagyon sok cél állapot van? a cél állapotok egy explicit listája a cél állapotok egy leírása (sakk) Hatékony módszer: egy frissen generált csomópont van-e már a másik fél keresési fájában. El kell tudni dönteni, hogy az egyes félrészekben milyen legyen a keresés. Hogy a keresések találkozzanak, legalább az egyik keresés összes csomópontját memóriában kell tartani = tár O(b d/2 ). O(b d/2 ) komplexitás feltételezi, hogy a két hullámfront metszésének megállapítása konstans idő alatt elvégezhető(?)
27 Egyenletes költségű keresés (Dijkstra) (Ro-EgyenletesKoltsegu-DK.pdf) szélességi keresés módosítása: a hullámfront g(n) útköltség függvénnyel mért legkisebb költségű csomópontját fejti ki először, nem pedig a legkisebb mélységű csomópontot. szélességi keresés is egyenletes költségű keresés, amelyben: g(n) = Mélység(n), vagyis a csomópont mélysége. Az egyenletes költségű keresés a legolcsóbb megoldást találja meg, feltéve ha: az út költség egy út bejárása során nem csökkenhet: g(követő(n)) g(n) minden egyes n csomópontra.
28 A neminformált keresési stratégiák összehasonlítása b - elágazási tényező, d - a megoldás mélysége, m - a keresési fa maximális mélysége, l - a mélység korlát. Krit. SzK EgyKK MK MKK IMK KK Idő igény Tár igény b d b d b m b l b d b d/2 b d b d bm bl bd b d/2 Opt.? Igen Igen Nem Nem Igen Igen Teljes? Igen Igen Nem Igen, ha l d Igen Igen tárkomplexitás =< időkomplexitás
29 Büntessük a hátrakeresést! De ugyanaz és könnyebb díjazni az előrekeresést a célállapot irányába. Ehhez kell valami elképzelés, hogy a cél: merrefelé van és, nagyjából milyen messzire fekszik. Ez az információ az un. heurisztika, heurisztikus függvény h(n), amit: a probléma minden állapotára tudni kell kiszámítani kifejezi az előrehaladás becsült költségét ha pontos, akkor elvben fölöslegessé teszi a keresést (ha nagyon pontatlan, akkor semmit sem segít) Ilyen keresés az un. heurisztikus, másképpen informált keresés.
30 Legyen a heurisztikus függvény a légvonalban mért távolság (h LMT ) Az igényeket teljesíti? Mi mondható a hibájáról?
31 A célhoz legközelebbinek tűnő csomópont először - a legjobbat-először, avagy a mohó keresés (Ro-MohoK.pdf) Stratégia: a következő lépésben azt a csp-t fejti ki, amelyhez rendelt probléma-állapotot a legközelebbinek ítéli a célállapothoz. A ítélethez kell tehát egy becslő heurisztikus függvény h(n) (1) az n csp-ból egy cél-állapotba vezető legolcsóbb út becsült költsége (2) a célállapotban h(n)= 0, jó célállapottesztnek is (3) lehet hibája (a tényleges költséghez képest) és elvárjuk, hogy minél kisebb hibának minél ügyesebb keresés feleljen meg.
32 ezt kaptuk ezt kellene kapni
33 Mohó algoritmus általában gyorsan megtalálja a megoldást, de nem mindig az optimális megoldást találja meg. A mohó keresés érzékeny a hibás kezdő lépésekre is.
34 Mohó keresés: mélységi keresésre hasonlít, egyetlen út végigkövetését preferálja a célig: de zsákutcából visszalép Ua. a problémák, mint a mélységi keresésnél: nem optimális, nem teljes (elindul egy végtelen úton és nem tér vissza új lehetőséget kipróbálni) (worst-case) időigény: O(b m ) Az összes csomópontot a memóriában tartja: tárigény = időigény Jó heurisztikus függvénnyel a tár- és időigény jelentősen csökkenthető, a csökkentés az adott problémától és a h függvény minőségétől függ. Tökéletes információ = előretartás elágazások nélkül = lineáris tár = lineáris idő! Szóval a mohó keresés ígéretes, de mégsem jó.
35 A teljes útköltség minimalizálása - A* keresés (Ro-AcsillagK.pdf) mohó: min {h(n)} a célhoz vezető útköltség becslőjét minimalizálja nem teljes (nem optimális) egyenletes költségű: min { g(n)} a megtett út költségét minimalizálja optimális (egyben teljes is), de nagyon rossz hatékonyságú a két stratégia ötvözése: min {f(n) = h(n) + g(n)} g(n): a kiinduló cs-ponttól az n cs-pontig számított út tényleges költsége h(n): az n cs-ponttól a célba vezető legolcsóbb költségű út becsült értéke f(n): a kiinduló csp-tól az adott n csp-on át a célba vezető legolcsóbb költségű út becsült értéke (de facto standard az útkeresésben)
36 Ha a h függvény soha ne becsüli felül a cél eléréséhez szükséges költséget = elfogadható heurisztika (optimista, a cél közelebbinek tűnik, mint amilyen) Ha h elfogadható, akkor f(n) soha sem becsüli túl az n csomóponton át vezető legjobb megoldás valódi költségét A* keresés: az f függvényt alkalmazó olyan mohó keresés, ahol h elfogadható (olyan Dijkstra-keresés, ahol a csomópontokra cél-felé egy p(n) csökkenő potenciálmezőt értelmeztük, és a figyelembe vett élsúly a redukált élsúly R (n1,n2) = élsúly(n1,n2) p(n1) + p(n2) ) Ha a gyökérből nézve egyetlen út f értéke nem csökken a heurisztika monoton. Egy heurisztikus függvény aka. monoton, ha teljesíti a háromszög egyenlőtlenséget (konzisztens heurisztika, h LMT ilyen). trükk: maximális-út egyenlőség (n-ből n -be): f(n') = max( f(n), g(n') + h(n') ) ha f a gyökérből kiinduló utak mentén soha sem csökken határvonalak
37 Egyenletes költségű (A* keresés h = 0 mellett) a csp-sávok a kiinduló csp köré húzott többé-kevésbé koncentrikus körök. Koncentrikusak a szélességi keresés esetében. Egy pontosabb heurisztikus függvény esetén a sávok a cél-állapot felé nyúlnak, rásimulnak az optimális útra.
38 Az A* teljes és optimális f(g 2 ) = g(g 2 ) > g(g) > f(n) Ha f* az optimális megoldási út költsége, akkor: - A* kifejti az összes f(n) < f* csp-t - ezek után egy cél-csp kiválasztása előtt még kifejthet néhány csp-t a cél-határvonalon, amelyekre f(n) = f* Az ilyen típusú optimális algoritmusok közül az A* keresés bármely adott heurisztikus függvény mellett optimális hatékonyságú. Egyetlen optimális algoritmus sem fejt ki garantáltan kevesebb csomópontot az A* keresés által kifejtett csomópontnál. A* teljessége - pontosan: az A* algoritmus lokálisan véges gráfokon (véges elágazási tényező) teljes, ha létezik pozitív konstans, amelynél semelyik operátor költsége sem kisebb. (ki akarjuk kerülni a véges határértékkel rendelkező végtelen számú infinitezimális mennyiségekkel kapcsolatos problémákat, azonban a probléma formalizálása rajtunk múlik, és vessen magára, aki ilyennek formalizálná a problémát)
39 Az A* algoritmus komplexitása (teljes, optimális és az összes ilyen közül optimálisan hatékony) Buktató: a legtöbb esetben a csp-ok száma a keresési tér cél-határvonalán belül a megoldás hosszának még mindig exponenciális függvénye. Exponenciális - kivéve, ha a heurisztikus függvény hibája legfeljebb az aktuális útköltség logaritmusával nő: h(n) h*(n) O(log(h*(n)), (h*(n) a valódi költség) Majdnem minden, gyakorlati heurisztikus függvény esetén a hiba legalább arányos az út költséggel - exponenciális növekedés. Egy jól megválasztott heurisztikus függvény ettől függetlenül a nem informált keresési algoritmushoz képest jelentős megtakarítást eredményezhet?! (hogyan?!) A* algoritmus problémája: az összes legenerált csomópontot eltárolja, lényegesen hamarabb felemészti a memóriát, mintsem kifutna az időből.
40 Heurisztikus függvények létrehozása (legyen sok és jó) 8-as tili-toli: kb. 12 lépés, b ~ 3, kimerítő keresés = 10 5 állapot Gyorsan a legrövidebb megoldás? - elfogadható heurisztika kell! h1 = a rossz helyen lévő lapkák száma. elfogadható: minden rossz helyen lévő lapkát legalább egyszer mozgatni kell h2 = a lapkák céltól mért (vízsz. és függ.) távolságainak összege: háztömb- vagy Manhattan-távolság elfogadható: minden egyes mozgatással egy lapkát csak egy (vízszintes és függőleges) lépéssel lehet közelebb vinni a célhoz. h1 = = 7 Jó lesz pl.: h2 = = 18 h3 = (h1 + h2)/2? h3 =... =...? stb.
41 Heurisztikus függvény pontossága és hatékonysága A heurisztikus függvények minősítése: b* effektív elágazási tényező ha A* által kifejtett összes cs-pont száma N, a megoldás mélysége d, akkor b* annak a d mélységű kiegyensúlyozott fának az elágazási tényezője, amely N cs-pontot tartalmaz: N = 1 + b* + (b*) (b*) d (pl. 5 mélységben fekvő megoldás 52 cs-pont kifejtésével: az effektív elágazási tényező 1.91) 52 < 63 = Egy adott heurisztikus függvény által generált fa effektív elágazási tényezője általában nagyjából állandó egy adott problémaosztály számos egyedére. A b* kis számú probléma halmazon végzett kísérleti mérése jó becslés. Egy jól megtervezett heurisztikus függvény effektív elágazási tényezője 1 körüli érték (de 1-nél nagyobb!).
42 h1 és h2 tesztelése: 100 random probléma példány, 2, 4,, 24 mélységű megoldással, A*, illetve a neminformált iteratívan mélyülő keresés
43
44 Heurisztikus függvény: pontosság és hatékonyság h1, h2 heurisztikus függvények tesztelése: vajon a h2 mindig jobb-e, mint a h1? Igen (miért?). minden n csp-ra h2 (n) h1 (n): h2 dominálja h1 et, domináció = hatékonyság h2-t használó A* kevesebb csp-t fog kifejteni, mint h1 et használó Mindig jobb nagyobb értékeket adó elfogadható(!) heurisztikus függvényeket alkalmazni. Tényleges Elfogadható, kis hiba Elfogadható, közepes hiba Elfogadható, durva hiba Elfogadható, nagyon durva hiba
45 (Jó) Heurisztikus függvények kitalálása Egy lapka aza-ról a B-re mozgatható, haa és B szomszédok és a B mező üres. Egy vagy több feltétel törlésével un. relaxált problémákat hozhatunk létre (a) Egy lapka az A-ról a B-re mozgatható, ha A és B szomszédosak. (b) Egy lapka az A-ról a B-re mozgatható, ha a B mező üres. (c) Egy lapka az A-ról a B-re mozgatható. (a) = 9 lépés (c) = 2 lépés (h2) (h1)
46 (Jó) Heurisztikus függvények kitalálása Relaxált probléma: olyan probléma, amelyben az operátorokra kevesebb megkötést teszünk, mint az eredeti problémában. Gyakori, hogy a relaxált probléma pontos megoldásának költsége jó heurisztikus függvény az eredeti problémára. Gyakori, hogy a relaxált probléma egyszerűsége miatt, az optimális megoldás analitikusan is meghatározható. A relaxált probléma pontos megoldása mindig egy elfogadható heurisztika a kevésbé relaxált problémára.
47 (Jó) Heurisztikus függvények kitalálása h3: (Disjoint) Pattern Database Heuristics h4: Linear Conflict Heuristics h5: Gaschnig s Heuristics Piros lapkák megoldása = 20 lépés Kék lapkák megoldása = 25 lépés Telljes heurisztika: h3 = 20+25=45 lépés h1 = 14 h2 = 39 h3 = 45 h2 a h3 egy speciális esete, ha minden pattern egy lapka!
48 (Jó) Heurisztikus függvények kitalálása h3: (Disjoint) Pattern Database Heuristics h4: Linear Conflict Heuristics h5: Gaschnig s Heuristics h2 = = 4 de a lapkák egymással szemben nem tolhatók h4 = h2 + 2 (kikerülés) h4 = h2 + 2 x (sorbeli lineáris konfliktus, minden sorra + oszlopbeli lineáris konfliktus, minden oszlopra)
49 (Jó) Heurisztikus függvények kitalálása h3: (Disjoint) Pattern Database Heuristics h4: Linear Conflict Heuristics h5: Gaschnig s Heuristics (b) Egy lapka az A-ról a B-re mozgatható, ha a B mező üres. elfogadható, jó becslés
50 (Jó) Heurisztikus függvények kitalálása Ha egy problémához adottak a h 1,...,h m elfogadható heurisztikák és semelyik sem dominálja a másikat, melyiket kellene választanunk? Nem kell választanunk. A lehető legjobb: h(n) = max{ h 1 (n),...,h m (n) } mindig azt a függvényt használja, amelyik az adott csomópontra a legpontosabb, elemek mind elfogadhatóak, ezért h is elfogadható, h dominálja az összes heurisztikus függvényt. Probléma: az elemezhetőség, hiszen konkrét h mindig változik? Heurisztikus függvények megalkotása: - ha a heurisztikus függvény olyan összetett, hogy értékének egy csp-ra történő meghatározása sok időt vesz igénybe, akkor baj van. Egy jó heurisztikus függvény: pontos és hatékonyan számítható
51 Memória korlátozott keresés általában az első korlát, amibe beleütközünk, a rendelkezett memória. IMA*: az Iteratívan-Mélyülő-Keresés heurisztikus kiterjesztése. RLEK: Rekurzív Legjobban Először Keresés EMA*: Egyszerűsített véges memóriájú A* mint az A*, de korlátozza a sor méretét, hogy az beférjen a memóriába. stb. Iteratívan Mélyülő A* keresés (IMA*) Minden iteráció egy mélységi keresés, mélységkorlát helyett egy f-költség korláttal. Minden iteráció kifejti az összes - az adott f-költség határvonalon belül fekvő - csomópontot, átnézve a határvonalon, hogy megtalálja, hol fekszik a következő határvonal. Az IMA* uu. teljes és optimális, mint az A*, de a mélységi keresés jellege miatt csak a leghosszabb felderített út hosszával arányos memóriát igényel. Az IMA* algoritmus időigénye erősen függ attól, hogy a heurisztikus függvény hány különböző értéket vehet fel. Az utolsó iterációja kb. ua. csomópontot fejt ki, mint az A* (időkomplexitás!). Összetettebb problémán nehezebben boldogul (ha sok iteráció kell).
52 Rekurzív Legjobb Először Keresés (Ro-RLEK.pdf) Addig halad Legjobbat Először módon f érték szerint, amíg jobb alternatívára nem lel hátrahagyott elágazásban. Átkapcsol, felszabadít memóriát, de a pillanatnyilag követett út költségét memorizálja.
53 Rekurzív Legjobb Először Keresés (Ro-RLEK.pdf) Addig halad Legjobbat Először módon f érték szerint, amíg jobb alternatívára nem lel hátrahagyott elágazásban. Átkapcsol, felszabadít memóriát, de a pillanatnyilag követett út költségét memorizálja.
54 Rekurzív Legjobb Először Keresés (Ro-RLEK.pdf) Addig halad Legjobbat Először módon f érték szerint, amíg jobb alternatívára nem lel hátrahagyott elágazásban. Átkapcsol, felszabadít memóriát, de a pillanatnyilag követett út költségét memorizálja.
55 Rúgó tervezése kereséssel Alak Átmérő Menetszám Anyag Befogás stb. Hőmérséklet-tartomány Húzószilárdság Ellenállás/ ütközés Megengedett munkastressz Rugalmassági modulus Élettartam Tűrési határok Végtelen sokszor alkalmazható stressz Keménység Elektromos vezetés Mágneses tulajdonságok Korrózióvédettség Költség stb. max/ min/ konkrét... paraméterek célok
56 Lokálisan kereső algoritmusok Állapotok jósága: egy hiperfelület az állapotok N-dim paraméterterében. A felület magassága = az adott állapot optimalitása. A felületen a legmagasabb (legalacsonyabb) csúcsot keressük, ami egyben az optimális megoldásnak felel meg. A csúcs helyén a kívánt paramétertekék = a probléma megoldása. Általában csak az aktuális állapot tárolt, és csak a közvetlen környezetében nézünk előre. Tipikus probléma: optimalizálás, optimalizáló tervezés. A keresési tér különleges... Visszalépés nincs, amiatt a memóriaigény kicsi, fix. Az időigény lineáris. Garancia megoldásra? (teljesség?, optimalitás?) hegymászó (diszkrét gradiens): mindig amerre javít az aktuális állapoton szimulált lehűtés: néha megenged rossz lépéseket is lokális nyaláb keresés: mindig k csomópontot tart számon véletlen indítású genetikus algoritmusok:mint a lokális nyaláb, speciális (genetikus) lépésoperátorokkal...
 - ciklikusan lép fel mindig a javuló értékek felé - nem tart nyilván keresési fát - ha egynél több legjobb követő csomópont merül fel, véletlenszerűen bármelyiket kiválaszthatja.")
57 Hegymászó keresés (Ro-HegyMaszo-K.pdf) - ciklikusan lép fel mindig a javuló értékek felé - nem tart nyilván keresési fát - ha egynél több legjobb követő csomópont merül fel, véletlenszerűen bármelyiket kiválaszthatja. 3 fő probléma: lokális maximum: ha egy lokális maximumba ér, akkor ott megáll fennsík: ott a kiértékelő függvény lapos, véletlen irányválasztás hegygerinc: egy hegygerinc oldalai meredekek, a keresés könnyen eljut a gerincre, de előfordulhat, hogy a gerinc maga csak finoman emelkedik a csúcs felé (Sok lépés kifárasztja a rendszert).

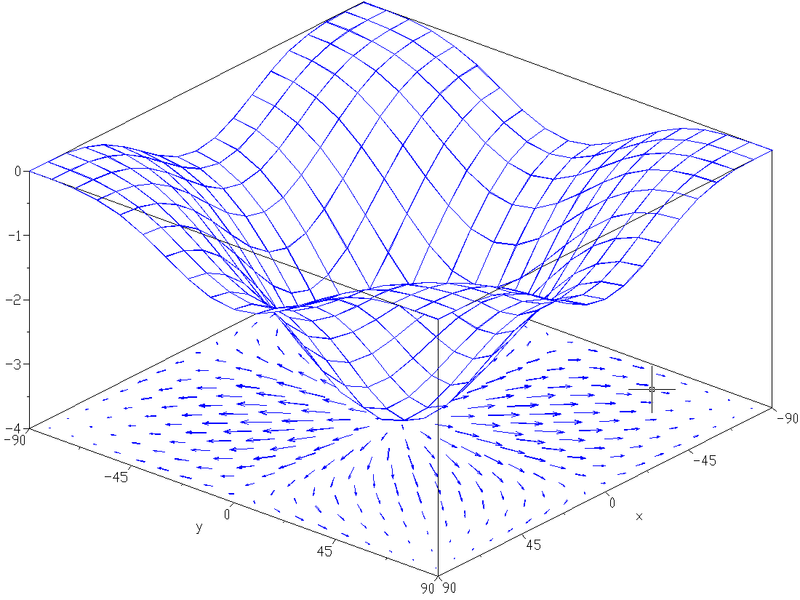
58 Lokális szélsőérték f (x) = 0 Ha több, melyik a globális?
59 Véletlen újraindítású hegymászás (és sok más változat): véletlenül generált kiinduló állapotokból hegymászó keresés, amíg nem jár le az idő, vagy már nincs észrevehető előrelépés a hegymászás sikere: az állapottér felszínének alakja - ha csak néhány lokális maximum: gyors megoldás. - egy valódi probléma = egy sündisznó felszín. Ha a probléma NP-teljes, akkor az exponenciális időigénynél jobb nem lesz = exponenciálisan sok lokális maximum. Általában kisszámú iteráció után már elfogadhatóan jó megoldást lehet találni.
60 A dimenzió átka
61 Szimulált lehűtés Véletlen újraindítás helyett, ha a keresés egy lokális maximumban beragad, megengedhetjük, hogy néhány lefelé vezető lépést tegyen, hogy kimeneküljön a lokális maximumból. A szimulált lehűtés ciklusa: - a legjobb lépés megtétele helyett egy véletlen lépést tesz. - ha a lépés javít, akkor az mindig végrehajtásra kerül. - ellenkező esetben az algoritmus a lépést csak valamilyen, 1-nél kisebb valószínűséggel teszi meg (Boltzmann-eloszlás). P exp(- E / T) A valószínűség exponenciálisan csökken a lépés "rontó" képességével azzal a E mennyiséggel, amivel a kiértékelő függvény romlott, és az idővel, a hűtés függvényében.
62 Szimulált lehűtés T(idő) - hűtési karakterisztika - magas T-nél a "rossz" lépések nagy valószínűséggel fordulnak elő, - ahogy T tart nullához, a rossz lépések egyre kevésbé valószínűek, az algoritmus többé-kevésbé egy hegymászó algoritmusként viselkedik. Hűtési karakterisztika - a hőmérséklet csökkentésének mértéke Az egyedi lépések - termikus zaj okozta véletlen fluktuáció. Ha a hőmérsékletet kellően lassan csökkentjük, akkor az anyag a legkisebb energiájú állapotba jut. Ha a hűtési karakterisztika T-t kellően lassan csökkentjük, az algoritmus egy globális minimumot fog találni.
63 Nyaláb-keresés Lokális nyaláb keresés - k állapotot követ nyomon Indulás: k véletlen módon generált állapot Minden lépésben a k állapot mindegyikének összes követőit kifejti Ha ezek valamelyike egy cél, az algoritmus leáll Különben a teljes listából kiválasztja a legjobb k követőt, és ezt az eljárást ismétli. Megnövelt tár - - megnövelt esély a jó extrémumra.
64 Genetikus algoritmusok Indulás: k véletlen módon generált állapot = populáció Minden állapot vagy egyed = egy véges ábécé fölött értelmezett, leggyakrabban egy, a 0-kból és 1-ekből álló füzér (a probléma kódolása) - populáció - fitnesz-függvény - keresztezés (kiválasztás, párosítás) fitnesz függvényében - mutáció - elitizmus - Darwin-/ Lamarck-féle öröklődés - új populáció kialakítása Mint a hegymászó, ill. a nyaláb-keresés (ivartalan/ ivaros szaporodás)
 fitnesz = 28 - n")
65 Genetikus algoritmusok A 8-királynő probléma állapotai = pl. 8 számjegyes füzérek (1.oszlop poz., 2. oszlop poz.,, 8. oszlop poz.) fitnesz = 28 - n


66 darwini, lamarcki? 2006 NASA ST5 spacecraft antenna
67 És még sok-sok egyéb keresési algoritmus... a. Minden keresési algoritmusnak számos változata van b. Új algoritmusok kitalálása az MI mindig aktív területe c. Folytonos terekben a kereséshez gradiens alapú eljárások szolgálnak x x - f(x) x x - H -1 (x) f(x) relaxációs módszer gradiens fix lépéshosszal gradiens optimalizált lépéshosszal Newton-módszer és sok más d. (Alagutas hegymászás (minimization + tunnelling)...) e. Hiányos információ mellett (felfedezési problémák) az un. on-line változatok használatosak (pl. tanuló valós-idejű A*, ld. jegyzet)
68
69 Kis HF8 Válasszon egy kb. 20 lépésből álló sakkjátszma leírását. A játszma minden állásában mérje fel az akkor a lépésnél lévő játékos részére rendelkezésre álló legális lépések számát (indulásnál a fehérnek 20 legális lépése van). Számítsa ki e legális lépések középértékét és egy egészre kerekítse le. Keresse ki, hogy 2016-ban milyenek a kurrens legjobb szuper szg. tár és sebesség adatai (wiki). Vegye fel az állás eltárolására és a lépés kiszámítására alkalmas (fiktív) tár és idő adatot. Képzelje el, hogy e gép használatával fel kell építenie és eltárolnia a kikeresett sakkjátszmához tartozó keresési fát (amelynek mélysége és elágazási tényezője adott). Számítsa ki, hogy tárban és időben mérve hogyan néz ki a fa növekedése a játszma lépésszám függvényével (azaz a mélység növekedésével)! (minden színten a kapott átlagos elágazási tényezővel számoljon!) (értelmes közelítésekkel éljen!)
Mesterséges Intelligencia MI
 Mesterséges Intelligencia MI Problémamegoldás kereséssel ha sötétben tapogatózunk Dobrowiecki Tadeusz Eredics Péter, és mások BME I.E. 437, 463-28-99 dobrowiecki@mit.bme.hu, http://www.mit.bme.hu/general/staff/tade
Mesterséges Intelligencia MI Problémamegoldás kereséssel ha sötétben tapogatózunk Dobrowiecki Tadeusz Eredics Péter, és mások BME I.E. 437, 463-28-99 dobrowiecki@mit.bme.hu, http://www.mit.bme.hu/general/staff/tade
Mesterséges Intelligencia MI
 Mesterséges Intelligencia MI Problémamegoldás kereséssel - ha segítenek útjelzések Dobrowiecki Tadeusz Eredics Péter, és mások BME I.E. 437, 463-28-99 dobrowiecki@mit.bme.hu, http://www.mit.bme.hu/general/staff/tade
Mesterséges Intelligencia MI Problémamegoldás kereséssel - ha segítenek útjelzések Dobrowiecki Tadeusz Eredics Péter, és mások BME I.E. 437, 463-28-99 dobrowiecki@mit.bme.hu, http://www.mit.bme.hu/general/staff/tade
Mesterséges Intelligencia MI
 Mesterséges Intelligencia MI Problémamegoldás kereséssel - lokális információval Pataki Béla Bolgár Bence BME I.E. 414, 463-26-79 pataki@mit.bme.hu, http://www.mit.bme.hu/general/staff/pataki Rugó tervezése
Mesterséges Intelligencia MI Problémamegoldás kereséssel - lokális információval Pataki Béla Bolgár Bence BME I.E. 414, 463-26-79 pataki@mit.bme.hu, http://www.mit.bme.hu/general/staff/pataki Rugó tervezése
Mesterséges Intelligencia MI
 Mesterséges Intelligencia MI Problémamegoldás kereséssel - csak lokális információra alapozva Pataki Béla BME I.E. 414, 463-26-79 pataki@mit.bme.hu, http://www.mit.bme.hu/general/staff/pataki Lokálisan
Mesterséges Intelligencia MI Problémamegoldás kereséssel - csak lokális információra alapozva Pataki Béla BME I.E. 414, 463-26-79 pataki@mit.bme.hu, http://www.mit.bme.hu/general/staff/pataki Lokálisan
Mesterséges Intelligencia MI
 Mesterséges Intelligencia MI Problémamegoldás kereséssel általános problémák Dobrowiecki Tadeusz Eredics Péter, és mások BME I.E. 437, 463-28-99 dobrowiecki@mit.bme.hu, http://www.mit.bme.hu/general/staff/tade
Mesterséges Intelligencia MI Problémamegoldás kereséssel általános problémák Dobrowiecki Tadeusz Eredics Péter, és mások BME I.E. 437, 463-28-99 dobrowiecki@mit.bme.hu, http://www.mit.bme.hu/general/staff/tade
Mesterséges Intelligencia MI
 Mesterséges Intelligencia MI Problémamegoldás kereséssel lokális információval Dobrowiecki Tadeusz Eredics Péter, és mások BME I.E. 437, 463-28-99 dobrowiecki@mit.bme.hu, http://www.mit.bme.hu/general/staff/tade
Mesterséges Intelligencia MI Problémamegoldás kereséssel lokális információval Dobrowiecki Tadeusz Eredics Péter, és mások BME I.E. 437, 463-28-99 dobrowiecki@mit.bme.hu, http://www.mit.bme.hu/general/staff/tade
Mesterséges Intelligencia MI
 Mesterséges Intelligencia MI Problémamegoldás kereséssel vakon http://mialmanach.mit.bme.hu/aima/ch03s03 3. fejezet 3.4 alfejezet Pataki Béla, (Hullám Gábor) BME I.E. 414, 463-26-79 pataki@mit.bme.hu,
Mesterséges Intelligencia MI Problémamegoldás kereséssel vakon http://mialmanach.mit.bme.hu/aima/ch03s03 3. fejezet 3.4 alfejezet Pataki Béla, (Hullám Gábor) BME I.E. 414, 463-26-79 pataki@mit.bme.hu,
Problémamegoldás kereséssel. Mesterséges intelligencia március 7.
 Problémamegoldás kereséssel Mesterséges intelligencia 2014. március 7. Bevezetés Problémamegoldó ágens Kívánt állapotba vezető cselekvéseket keres Probléma megfogalmazása Megoldás megfogalmazása Keresési
Problémamegoldás kereséssel Mesterséges intelligencia 2014. március 7. Bevezetés Problémamegoldó ágens Kívánt állapotba vezető cselekvéseket keres Probléma megfogalmazása Megoldás megfogalmazása Keresési
Mesterséges intelligencia 2. laborgyakorlat
 Mesterséges intelligencia 2. laborgyakorlat Keresési módszerek A legtöbb feladatot meg lehet határozni keresési feladatként: egy ún. állapottérben, amely tartalmazza az összes lehetséges állapotot fogjuk
Mesterséges intelligencia 2. laborgyakorlat Keresési módszerek A legtöbb feladatot meg lehet határozni keresési feladatként: egy ún. állapottérben, amely tartalmazza az összes lehetséges állapotot fogjuk
Intelligens Rendszerek Elmélete IRE 4/32/1
 Intelligens Rendszerek Elmélete 4 IRE 4/32/1 Problémamegoldás kereséssel http://nik.uni-obuda.hu/mobil IRE 4/32/2 Egyszerű lények intelligenciája? http://www.youtube.com/watch?v=tlo2n3ymcxw&nr=1 IRE 4/32/3
Intelligens Rendszerek Elmélete 4 IRE 4/32/1 Problémamegoldás kereséssel http://nik.uni-obuda.hu/mobil IRE 4/32/2 Egyszerű lények intelligenciája? http://www.youtube.com/watch?v=tlo2n3ymcxw&nr=1 IRE 4/32/3
Mesterséges Intelligencia MI
 Mesterséges Intelligencia MI Keresés ellenséges környezetben Dobrowiecki Tadeusz Eredics Péter, és mások BME I.E. 437, 463-28-99 dobrowiecki@mit.bme.hu, http://www.mit.bme.hu/general/staff/tade Ellenség
Mesterséges Intelligencia MI Keresés ellenséges környezetben Dobrowiecki Tadeusz Eredics Péter, és mások BME I.E. 437, 463-28-99 dobrowiecki@mit.bme.hu, http://www.mit.bme.hu/general/staff/tade Ellenség
Kereső algoritmusok a diszkrét optimalizálás problémájához
 Kereső algoritmusok a diszkrét optimalizálás problémájához A. Grama, A. Gupta, G. Karypis és V. Kumar: Introduction to Parallel Computing, Addison Wesley, 2003. könyv anyaga alapján A kereső eljárások
Kereső algoritmusok a diszkrét optimalizálás problémájához A. Grama, A. Gupta, G. Karypis és V. Kumar: Introduction to Parallel Computing, Addison Wesley, 2003. könyv anyaga alapján A kereső eljárások
Kereső algoritmusok a diszkrét optimalizálás problémájához
 Kereső algoritmusok a diszkrét optimalizálás problémájához A. Grama, A. Gupta, G. Karypis és V. Kumar: Introduction to Parallel Computing, Addison Wesley, 2003. könyv anyaga alapján A kereső eljárások
Kereső algoritmusok a diszkrét optimalizálás problémájához A. Grama, A. Gupta, G. Karypis és V. Kumar: Introduction to Parallel Computing, Addison Wesley, 2003. könyv anyaga alapján A kereső eljárások
Számítógépes döntéstámogatás. Genetikus algoritmusok
 BLSZM-10 p. 1/18 Számítógépes döntéstámogatás Genetikus algoritmusok Werner Ágnes Villamosmérnöki és Információs Rendszerek Tanszék e-mail: werner.agnes@virt.uni-pannon.hu BLSZM-10 p. 2/18 Bevezetés 1950-60-as
BLSZM-10 p. 1/18 Számítógépes döntéstámogatás Genetikus algoritmusok Werner Ágnes Villamosmérnöki és Információs Rendszerek Tanszék e-mail: werner.agnes@virt.uni-pannon.hu BLSZM-10 p. 2/18 Bevezetés 1950-60-as
Mesterséges Intelligencia. Csató Lehel. Csató Lehel. Matematika-Informatika Tanszék Babeş Bolyai Tudományegyetem, Kolozsvár 2007/2008
 Matematika-Informatika Tanszék Babeş Bolyai Tudományegyetem, Kolozsvár 2007/2008 Az Előadások Témái Bevezető: mi a mesterséges intelligencia... Tudás reprezentáció Gráfkeresési stratégiák Szemantikus hálók
Matematika-Informatika Tanszék Babeş Bolyai Tudományegyetem, Kolozsvár 2007/2008 Az Előadások Témái Bevezető: mi a mesterséges intelligencia... Tudás reprezentáció Gráfkeresési stratégiák Szemantikus hálók
Keresések Gregorics Tibor Mesterséges intelligencia
 Keresések ADAT := kezdeti érték while terminálási feltétel(adat) loop SELECT SZ FROM alkalmazható szabályok ADAT := SZ(ADAT) endloop KR vezérlési szintjei vezérlési stratégia általános modellfüggő heurisztikus
Keresések ADAT := kezdeti érték while terminálási feltétel(adat) loop SELECT SZ FROM alkalmazható szabályok ADAT := SZ(ADAT) endloop KR vezérlési szintjei vezérlési stratégia általános modellfüggő heurisztikus
Kétszemélyes játékok Gregorics Tibor Mesterséges intelligencia
 Kétszemélyes játékok Kétszemélyes, teljes információjú, véges, determinisztikus,zéró összegű játékok Két játékos lép felváltva adott szabályok szerint, amíg a játszma véget nem ér. Mindkét játékos ismeri
Kétszemélyes játékok Kétszemélyes, teljes információjú, véges, determinisztikus,zéró összegű játékok Két játékos lép felváltva adott szabályok szerint, amíg a játszma véget nem ér. Mindkét játékos ismeri
V. Kétszemélyes játékok
 Teljes információjú, véges, zéró összegű kétszemélyes játékok V. Kétszemélyes játékok Két játékos lép felváltva adott szabályok szerint. Mindkét játékos ismeri a maga és az ellenfele összes választási
Teljes információjú, véges, zéró összegű kétszemélyes játékok V. Kétszemélyes játékok Két játékos lép felváltva adott szabályok szerint. Mindkét játékos ismeri a maga és az ellenfele összes választási
Mesterséges Intelligencia MI
 Mesterséges Intelligencia MI Kényszerkielégítési problémák (Constraint Satisfaction Problem, CSP) http://mialmanach.mit.bme.hu/aima/ch05 Pataki Béla BME I.E. 414, 463-26-79 pataki@mit.bme.hu, http://www.mit.bme.hu/general/staff/pataki
Mesterséges Intelligencia MI Kényszerkielégítési problémák (Constraint Satisfaction Problem, CSP) http://mialmanach.mit.bme.hu/aima/ch05 Pataki Béla BME I.E. 414, 463-26-79 pataki@mit.bme.hu, http://www.mit.bme.hu/general/staff/pataki
Navigáci. stervezés. Algoritmusok és alkalmazásaik. Osváth Róbert Sorbán Sámuel
 Navigáci ció és s mozgástervez stervezés Algoritmusok és alkalmazásaik Osváth Róbert Sorbán Sámuel Feladat Adottak: pálya (C), játékos, játékos ismerethalmaza, kezdőpont, célpont. Pálya szerkezete: akadályokkal
Navigáci ció és s mozgástervez stervezés Algoritmusok és alkalmazásaik Osváth Róbert Sorbán Sámuel Feladat Adottak: pálya (C), játékos, játékos ismerethalmaza, kezdőpont, célpont. Pálya szerkezete: akadályokkal
2. Visszalépéses keresés
 2. Visszalépéses keresés Visszalépéses keresés A visszalépéses keresés egy olyan KR, amely globális munkaterülete: egy út a startcsúcsból az aktuális csúcsba (az útról leágazó még ki nem próbált élekkel
2. Visszalépéses keresés Visszalépéses keresés A visszalépéses keresés egy olyan KR, amely globális munkaterülete: egy út a startcsúcsból az aktuális csúcsba (az útról leágazó még ki nem próbált élekkel
Számítógép és programozás 2
 Számítógép és programozás 2 11. Előadás Halmazkeresések, dinamikus programozás http://digitus.itk.ppke.hu/~flugi/ A keresési feladat megoldása Legyen a lehetséges megoldások halmaza M ciklus { X legyen
Számítógép és programozás 2 11. Előadás Halmazkeresések, dinamikus programozás http://digitus.itk.ppke.hu/~flugi/ A keresési feladat megoldása Legyen a lehetséges megoldások halmaza M ciklus { X legyen
Mesterséges Intelligencia. Csató Lehel. Csató Lehel. Matematika-Informatika Tanszék Babeş Bolyai Tudományegyetem, Kolozsvár 2010/2011 1/363
 1/6 Matematika-Informatika Tanszék Babeş Bolyai Tudományegyetem, Kolozsvár 2010/2011 Az Előadások Témái 46/6 Bevezető: mi a mesterséges intelligencia... Tudás reprezentáció stratégiák Szemantikus hálók
1/6 Matematika-Informatika Tanszék Babeş Bolyai Tudományegyetem, Kolozsvár 2010/2011 Az Előadások Témái 46/6 Bevezető: mi a mesterséges intelligencia... Tudás reprezentáció stratégiák Szemantikus hálók
Számítógép és programozás 2
 Számítógép és programozás 2 6. Előadás Problémaosztályok http://digitus.itk.ppke.hu/~flugi/ Emlékeztető A specifikáció egy előfeltételből és utófeltételből álló leírása a feladatnak Léteznek olyan feladatok,
Számítógép és programozás 2 6. Előadás Problémaosztályok http://digitus.itk.ppke.hu/~flugi/ Emlékeztető A specifikáció egy előfeltételből és utófeltételből álló leírása a feladatnak Léteznek olyan feladatok,
Mesterséges Intelligencia I. (I602, IB602)
") Dr. Jelasity Márk Mesterséges Intelligencia I. (I602, IB602) harmadik (2008. szeptember 15-i) előadásának jegyzete Készítette: Papp Tamás PATLACT.SZE KPM V. HEURISZTIKUS FÜGGVÉNYEK ELŐÁLLÍTÁSA Nagyon fontos
Dr. Jelasity Márk Mesterséges Intelligencia I. (I602, IB602) harmadik (2008. szeptember 15-i) előadásának jegyzete Készítette: Papp Tamás PATLACT.SZE KPM V. HEURISZTIKUS FÜGGVÉNYEK ELŐÁLLÍTÁSA Nagyon fontos
Megerősítéses tanulás 7. előadás
 Megerősítéses tanulás 7. előadás 1 Ismétlés: TD becslés s t -ben stratégia szerint lépek! a t, r t, s t+1 TD becslés: tulajdonképpen ezt mintavételezzük: 2 Akcióértékelő függvény számolása TD-vel még mindig
Megerősítéses tanulás 7. előadás 1 Ismétlés: TD becslés s t -ben stratégia szerint lépek! a t, r t, s t+1 TD becslés: tulajdonképpen ezt mintavételezzük: 2 Akcióértékelő függvény számolása TD-vel még mindig
Mesterséges Intelligencia. Csató Lehel. Csató Lehel. Matematika-Informatika Tanszék Babeş Bolyai Tudományegyetem, Kolozsvár 2007/2008
 Matematika-Informatika Tanszék Babeş Bolyai Tudományegyetem, Kolozsvár 007/008 Az Előadások Témái Bevezető: mi a mesterséges intelligencia... Tudás reprezentáció i stratégiák Szemantikus hálók / Keretrendszerek
Matematika-Informatika Tanszék Babeş Bolyai Tudományegyetem, Kolozsvár 007/008 Az Előadások Témái Bevezető: mi a mesterséges intelligencia... Tudás reprezentáció i stratégiák Szemantikus hálók / Keretrendszerek
Mesterséges Intelligencia MI
 Mesterséges Intelligencia MI Valószínűségi hálók - következtetés Dobrowiecki Tadeusz Eredics Péter, és mások BME I.E. 437, 463-28-99 dobrowiecki@mit.bme.hu, http://www.mit.bme.hu/general/staff/tade Következtetés
Mesterséges Intelligencia MI Valószínűségi hálók - következtetés Dobrowiecki Tadeusz Eredics Péter, és mások BME I.E. 437, 463-28-99 dobrowiecki@mit.bme.hu, http://www.mit.bme.hu/general/staff/tade Következtetés
Gépi tanulás a gyakorlatban. Lineáris regresszió
 Gépi tanulás a gyakorlatban Lineáris regresszió Lineáris Regresszió Legyen adott egy tanuló adatbázis: Rendelkezésünkre áll egy olyan előfeldolgozott adathalmaz, aminek sorai az egyes ingatlanokat írják
Gépi tanulás a gyakorlatban Lineáris regresszió Lineáris Regresszió Legyen adott egy tanuló adatbázis: Rendelkezésünkre áll egy olyan előfeldolgozott adathalmaz, aminek sorai az egyes ingatlanokat írják
Branch-and-Bound. 1. Az egészértéketű programozás. a korlátozás és szétválasztás módszere Bevezető Definíció. 11.
 11. gyakorlat Branch-and-Bound a korlátozás és szétválasztás módszere 1. Az egészértéketű programozás 1.1. Bevezető Bizonyos feladatok modellezése kapcsán előfordulhat olyan eset, hogy a megoldás során
11. gyakorlat Branch-and-Bound a korlátozás és szétválasztás módszere 1. Az egészértéketű programozás 1.1. Bevezető Bizonyos feladatok modellezése kapcsán előfordulhat olyan eset, hogy a megoldás során
Miskolci Egyetem Gépészmérnöki és Informatikai Kar Informatikai Intézet Alkalmazott Informatikai Intézeti Tanszék
 Miskolci Egyetem Gépészmérnöki és Informatikai Kar Informatikai Intézet Alkalmazott Informatikai Intézeti Tanszék 2016/17 2. félév 8. Előadás Dr. Kulcsár Gyula egyetemi docens Kereső algoritmusok alkalmazása
Miskolci Egyetem Gépészmérnöki és Informatikai Kar Informatikai Intézet Alkalmazott Informatikai Intézeti Tanszék 2016/17 2. félév 8. Előadás Dr. Kulcsár Gyula egyetemi docens Kereső algoritmusok alkalmazása
Közösség detektálás gráfokban
 Közösség detektálás gráfokban Önszervező rendszerek Hegedűs István Célkitűzés: valamilyen objektumok halmaza felett minták, csoportok detektálása csakis az egyedek közötti kapcsolatok struktúrájának a
Közösség detektálás gráfokban Önszervező rendszerek Hegedűs István Célkitűzés: valamilyen objektumok halmaza felett minták, csoportok detektálása csakis az egyedek közötti kapcsolatok struktúrájának a
Kiegészítő részelőadás 1. Az algoritmusok hatékonyságának mérése
 Kiegészítő részelőadás 1. Az algoritmusok hatékonyságának mérése Dr. Kallós Gábor 2014 2015 1 Az Ordó jelölés Azt mondjuk, hogy az f(n) függvény eleme az Ordó(g(n)) halmaznak, ha van olyan c konstans (c
Kiegészítő részelőadás 1. Az algoritmusok hatékonyságának mérése Dr. Kallós Gábor 2014 2015 1 Az Ordó jelölés Azt mondjuk, hogy az f(n) függvény eleme az Ordó(g(n)) halmaznak, ha van olyan c konstans (c
Adatszerkezetek 2. Dr. Iványi Péter
 Adatszerkezetek 2. Dr. Iványi Péter 1 Fák Fákat akkor használunk, ha az adatok között valamilyen alá- és fölérendeltség van. Pl. könyvtárszerkezet gyökér (root) Nincsennek hurkok!!! 2 Bináris fák Azokat
Adatszerkezetek 2. Dr. Iványi Péter 1 Fák Fákat akkor használunk, ha az adatok között valamilyen alá- és fölérendeltség van. Pl. könyvtárszerkezet gyökér (root) Nincsennek hurkok!!! 2 Bináris fák Azokat
Új típusú döntési fa építés és annak alkalmazása többtényezős döntés területén
 Új típusú döntési fa építés és annak alkalmazása többtényezős döntés területén Dombi József Szegedi Tudományegyetem Bevezetés - ID3 (Iterative Dichotomiser 3) Az ID algoritmusok egy elemhalmaz felhasználásával
Új típusú döntési fa építés és annak alkalmazása többtényezős döntés területén Dombi József Szegedi Tudományegyetem Bevezetés - ID3 (Iterative Dichotomiser 3) Az ID algoritmusok egy elemhalmaz felhasználásával
Függvények növekedési korlátainak jellemzése
 17 Függvények növekedési korlátainak jellemzése A jellemzés jól bevált eszközei az Ω, O, Θ, o és ω jelölések. Mivel az igények általában nemnegatívak, ezért az alábbi meghatározásokban mindenütt feltesszük,
17 Függvények növekedési korlátainak jellemzése A jellemzés jól bevált eszközei az Ω, O, Θ, o és ω jelölések. Mivel az igények általában nemnegatívak, ezért az alábbi meghatározásokban mindenütt feltesszük,
Mesterséges Intelligencia MI
 Mesterséges Intelligencia MI Racionalitás: a hasznosság és a döntés Dobrowiecki Tadeusz Eredics Péter, és mások BME I.E. 437, 463-28-99 dobrowiecki@mit.bme.hu, http://www.mit.bme.hu/general/staff/tade
Mesterséges Intelligencia MI Racionalitás: a hasznosság és a döntés Dobrowiecki Tadeusz Eredics Péter, és mások BME I.E. 437, 463-28-99 dobrowiecki@mit.bme.hu, http://www.mit.bme.hu/general/staff/tade
Mesterséges Intelligencia. Csató Lehel. Csató Lehel. Matematika-Informatika Tanszék Babeş Bolyai Tudományegyetem, Kolozsvár 2007/2008
 Matematika-Informatika Tanszék Babeş Bolyai Tudományegyetem, Kolozsvár 2007/2008 Az Előadások Témái Bevezető: mi a mesterséges intelligencia... Tudás reprezentáció stratégiák Szemantikus hálók / Keretrendszerek
Matematika-Informatika Tanszék Babeş Bolyai Tudományegyetem, Kolozsvár 2007/2008 Az Előadások Témái Bevezető: mi a mesterséges intelligencia... Tudás reprezentáció stratégiák Szemantikus hálók / Keretrendszerek
2. Visszalépéses stratégia
 2. Visszalépéses stratégia A visszalépéses keres rendszer olyan KR, amely globális munkaterülete: út a startcsúcsból az aktuális csúcsba (ezen kívül a még ki nem próbált élek nyilvántartása) keresés szabályai:
2. Visszalépéses stratégia A visszalépéses keres rendszer olyan KR, amely globális munkaterülete: út a startcsúcsból az aktuális csúcsba (ezen kívül a még ki nem próbált élek nyilvántartása) keresés szabályai:
Keresési algoritmusok, optimalizáció
 Keresési algoritmusok, optimalizáció Az eddig tanultakból a mostani részben gyakran használt (emiatt szükséges az ismeretük) programozási ismeretek: függvények létrehozása, meghívása (ld. 3. óra anyagában)
Keresési algoritmusok, optimalizáció Az eddig tanultakból a mostani részben gyakran használt (emiatt szükséges az ismeretük) programozási ismeretek: függvények létrehozása, meghívása (ld. 3. óra anyagában)
Adatszerkezetek. Nevezetes algoritmusok (Keresések, rendezések)
") Adatszerkezetek Nevezetes algoritmusok (Keresések, rendezések) Keresések A probléma általános megfogalmazása: Adott egy N elemű sorozat, keressük meg azt az elemet (határozzuk meg a helyét a sorozatban),
Adatszerkezetek Nevezetes algoritmusok (Keresések, rendezések) Keresések A probléma általános megfogalmazása: Adott egy N elemű sorozat, keressük meg azt az elemet (határozzuk meg a helyét a sorozatban),
ULTIMATE TIC TAC TOE. Serfőző Péter
 ULTIMATE TIC TAC TOE Serfőző Péter 2016.05.02. ULTIMATE TIC TAC TOE Amőba alapján Két változat, az első könnyű, a második nehéz A játék keletkezéséről nincsenek információk, de a játékelmélet elkezdett
ULTIMATE TIC TAC TOE Serfőző Péter 2016.05.02. ULTIMATE TIC TAC TOE Amőba alapján Két változat, az első könnyű, a második nehéz A játék keletkezéséről nincsenek információk, de a játékelmélet elkezdett
Diszkrét Irányítások tervezése. Heurisztika Dr. Bécsi Tamás
 Diszkrét Irányítások tervezése Heurisztika Dr. Bécsi Tamás Algoritmusok futásideje Az algoritmus futásideje függ az N bemenő paramétertől. Azonos feladat különböző N értékek esetén más futásidőt igényelnek.
Diszkrét Irányítások tervezése Heurisztika Dr. Bécsi Tamás Algoritmusok futásideje Az algoritmus futásideje függ az N bemenő paramétertől. Azonos feladat különböző N értékek esetén más futásidőt igényelnek.
Összefoglalás és gyakorlás
 Összefoglalás és gyakorlás High Speed Networks Laboratory 1 / 28 Hálózatok jellemző paraméterei High Speed Networks Laboratory 2 / 28 Evolúció alkotta adatbázis Önszerveződő adatbázis = (struktúra, lekérdezés)
Összefoglalás és gyakorlás High Speed Networks Laboratory 1 / 28 Hálózatok jellemző paraméterei High Speed Networks Laboratory 2 / 28 Evolúció alkotta adatbázis Önszerveződő adatbázis = (struktúra, lekérdezés)
, , A
 MI Nagy ZH, 2011. nov. 4., 14.15-16, A és B csoport - Megoldások A/1. Milyen ágenskörnyezetrıl azt mondjuk, hogy nem hozzáférhetı? Adjon példát egy konkrét ágensre, problémára és környezetre, amire igaz
MI Nagy ZH, 2011. nov. 4., 14.15-16, A és B csoport - Megoldások A/1. Milyen ágenskörnyezetrıl azt mondjuk, hogy nem hozzáférhetı? Adjon példát egy konkrét ágensre, problémára és környezetre, amire igaz
Algoritmusok bonyolultsága
 Algoritmusok bonyolultsága 5. előadás http://www.ms.sapientia.ro/~kasa/komplex.htm 1 / 27 Gazdaságos faváz Kruskal-algoritmus Joseph Kruskal (1928 2010) Legyen V = {v 1, v 2,..., v n }, E = {e 1, e 2,...,
Algoritmusok bonyolultsága 5. előadás http://www.ms.sapientia.ro/~kasa/komplex.htm 1 / 27 Gazdaságos faváz Kruskal-algoritmus Joseph Kruskal (1928 2010) Legyen V = {v 1, v 2,..., v n }, E = {e 1, e 2,...,
Genetikus algoritmusok
 Genetikus algoritmusok Zsolnai Károly - BME CS zsolnai@cs.bme.hu Keresőalgoritmusok osztályai Véletlent használó algoritmusok Keresőalgoritmusok Kimerítő algoritmusok Dinamikus programozás BFS DFS Tabu
Genetikus algoritmusok Zsolnai Károly - BME CS zsolnai@cs.bme.hu Keresőalgoritmusok osztályai Véletlent használó algoritmusok Keresőalgoritmusok Kimerítő algoritmusok Dinamikus programozás BFS DFS Tabu
A félév során előkerülő témakörök
 A félév során előkerülő témakörök rekurzív algoritmusok rendező algoritmusok alapvető adattípusok, adatszerkezetek, és kapcsolódó algoritmusok dinamikus programozás mohó algoritmusok gráf algoritmusok
A félév során előkerülő témakörök rekurzív algoritmusok rendező algoritmusok alapvető adattípusok, adatszerkezetek, és kapcsolódó algoritmusok dinamikus programozás mohó algoritmusok gráf algoritmusok
Képrekonstrukció 9. előadás
 Képrekonstrukció 9. előadás Balázs Péter Képfeldolgozás és Számítógépes Grafika Tanszék Szegedi Tudományegyetem hv-konvex összefüggő halmazok Mag-burok-szerű rekonstrukció: S. Brunetti, A. Del Lungo, F.
Képrekonstrukció 9. előadás Balázs Péter Képfeldolgozás és Számítógépes Grafika Tanszék Szegedi Tudományegyetem hv-konvex összefüggő halmazok Mag-burok-szerű rekonstrukció: S. Brunetti, A. Del Lungo, F.
Algoritmuselmélet 18. előadás
 Algoritmuselmélet 18. előadás Katona Gyula Y. Budapesti Műszaki és Gazdaságtudományi Egyetem Számítástudományi Tsz. I. B. 137/b kiskat@cs.bme.hu 2002 Május 7. ALGORITMUSELMÉLET 18. ELŐADÁS 1 Közelítő algoritmusok
Algoritmuselmélet 18. előadás Katona Gyula Y. Budapesti Műszaki és Gazdaságtudományi Egyetem Számítástudományi Tsz. I. B. 137/b kiskat@cs.bme.hu 2002 Május 7. ALGORITMUSELMÉLET 18. ELŐADÁS 1 Közelítő algoritmusok
Keresés képi jellemzők alapján. Dr. Balázs Péter SZTE, Képfeldolgozás és Számítógépes Grafika Tanszék
 Keresés képi jellemzők alapján Dr. Balázs Péter SZTE, Képfeldolgozás és Számítógépes Grafika Tanszék Lusta gépi tanulási algoritmusok Osztályozás: k=1: piros k=5: kék k-legközelebbi szomszéd (k=1,3,5,7)
Keresés képi jellemzők alapján Dr. Balázs Péter SZTE, Képfeldolgozás és Számítógépes Grafika Tanszék Lusta gépi tanulási algoritmusok Osztályozás: k=1: piros k=5: kék k-legközelebbi szomszéd (k=1,3,5,7)
angolul: greedy algorithms, románul: algoritmi greedy
 Mohó algoritmusok angolul: greedy algorithms, románul: algoritmi greedy 1. feladat. Gazdaságos telefonhálózat építése Bizonyos városok között lehet direkt telefonkapcsolatot kiépíteni, pl. x és y város
Mohó algoritmusok angolul: greedy algorithms, románul: algoritmi greedy 1. feladat. Gazdaságos telefonhálózat építése Bizonyos városok között lehet direkt telefonkapcsolatot kiépíteni, pl. x és y város
Algoritmusok Tervezése. 6. Előadás Algoritmusok 101 Dr. Bécsi Tamás
 Algoritmusok Tervezése 6. Előadás Algoritmusok 101 Dr. Bécsi Tamás Mi az algoritmus? Lépések sorozata egy feladat elvégzéséhez (legáltalánosabban) Informálisan algoritmusnak nevezünk bármilyen jól definiált
Algoritmusok Tervezése 6. Előadás Algoritmusok 101 Dr. Bécsi Tamás Mi az algoritmus? Lépések sorozata egy feladat elvégzéséhez (legáltalánosabban) Informálisan algoritmusnak nevezünk bármilyen jól definiált
Mesterséges Intelligencia MI
 Mesterséges Intelligencia MI Valószínűségi hálók - alapok Dobrowiecki Tadeusz Eredics Péter, és mások BME I.E. 437, 463-28-99 dobrowiecki@mit.bme.hu, http://www.mit.bme.hu/general/staff/tade Valószínűségi
Mesterséges Intelligencia MI Valószínűségi hálók - alapok Dobrowiecki Tadeusz Eredics Péter, és mások BME I.E. 437, 463-28-99 dobrowiecki@mit.bme.hu, http://www.mit.bme.hu/general/staff/tade Valószínűségi
Teljesen elosztott adatbányászat pletyka algoritmusokkal. Jelasity Márk Ormándi Róbert, Hegedűs István
 Teljesen elosztott adatbányászat pletyka algoritmusokkal Jelasity Márk Ormándi Róbert, Hegedűs István Motiváció Nagyméretű hálózatos elosztott alkalmazások az Interneten egyre fontosabbak Fájlcserélő rendszerek
Teljesen elosztott adatbányászat pletyka algoritmusokkal Jelasity Márk Ormándi Róbert, Hegedűs István Motiváció Nagyméretű hálózatos elosztott alkalmazások az Interneten egyre fontosabbak Fájlcserélő rendszerek
Mesterséges Intelligencia. Csató Lehel. Csató Lehel. Matematika-Informatika Tanszék Babeş Bolyai Tudományegyetem, Kolozsvár 2010/2011 1/363
 1/363 Matematika-Informatika Tanszék Babeş Bolyai Tudományegyetem, Kolozsvár 2010/2011 Az Előadások Témái 69/363 Bevezető: mi a mesterséges intelligencia... Tudás reprezentáció Gráfkeresési stratégiák
1/363 Matematika-Informatika Tanszék Babeş Bolyai Tudományegyetem, Kolozsvár 2010/2011 Az Előadások Témái 69/363 Bevezető: mi a mesterséges intelligencia... Tudás reprezentáció Gráfkeresési stratégiák
Dr. habil. Maróti György
 infokommunikációs technológiák III.8. MÓDSZER KIDOLGOZÁSA ALGORITMUSOK ÁTÜLTETÉSÉRE KIS SZÁMÍTÁSI TELJESÍTMÉNYŰ ESZKÖZÖKBŐL ÁLLÓ NÉPES HETEROGÉN INFRASTRUKTÚRA Dr. habil. Maróti György maroti@dcs.uni-pannon.hu
infokommunikációs technológiák III.8. MÓDSZER KIDOLGOZÁSA ALGORITMUSOK ÁTÜLTETÉSÉRE KIS SZÁMÍTÁSI TELJESÍTMÉNYŰ ESZKÖZÖKBŐL ÁLLÓ NÉPES HETEROGÉN INFRASTRUKTÚRA Dr. habil. Maróti György maroti@dcs.uni-pannon.hu
HÁLÓZATSZERŰEN MŰKÖDŐ LOGISZTIKÁVAL INTEGRÁLT TERMELÉSÜTEMEZÉS MEGOLDÁSA GENETIKUS ALGORITMUS ALKALMAZÁSÁVAL. OLÁH Béla
 HÁLÓZATSZERŰEN MŰKÖDŐ LOGISZTIKÁVAL INTEGRÁLT TERMELÉSÜTEMEZÉS MEGOLDÁSA GENETIKUS ALGORITMUS ALKALMAZÁSÁVAL OLÁH Béla A TERMELÉSÜTEMEZÉS MEGFOGALMAZÁSA Flow shop: adott n számú termék, melyeken m számú
HÁLÓZATSZERŰEN MŰKÖDŐ LOGISZTIKÁVAL INTEGRÁLT TERMELÉSÜTEMEZÉS MEGOLDÁSA GENETIKUS ALGORITMUS ALKALMAZÁSÁVAL OLÁH Béla A TERMELÉSÜTEMEZÉS MEGFOGALMAZÁSA Flow shop: adott n számú termék, melyeken m számú
Gráfok 2. Legrövidebb utak, feszítőfák. Szoftvertervezés és -fejlesztés II. előadás. Szénási Sándor
 Gráfok 2. Legrövidebb utak, feszítőfák előadás http://nik.uni-obuda.hu/sztf2 Szénási Sándor Óbudai Egyetem,Neumann János Informatikai Kar Legrövidebb utak keresése Minimális feszítőfa keresése Gráfok 2
Gráfok 2. Legrövidebb utak, feszítőfák előadás http://nik.uni-obuda.hu/sztf2 Szénási Sándor Óbudai Egyetem,Neumann János Informatikai Kar Legrövidebb utak keresése Minimális feszítőfa keresése Gráfok 2
Optimalizálás alapfeladata Legmeredekebb lejtő Lagrange függvény Log-barrier módszer Büntetőfüggvény módszer 2017/
 Operációkutatás I. 2017/2018-2. Szegedi Tudományegyetem Informatikai Intézet Számítógépes Optimalizálás Tanszék 9. Előadás Az optimalizálás alapfeladata Keressük f függvény maximumát ahol f : R n R és
Operációkutatás I. 2017/2018-2. Szegedi Tudományegyetem Informatikai Intézet Számítógépes Optimalizálás Tanszék 9. Előadás Az optimalizálás alapfeladata Keressük f függvény maximumát ahol f : R n R és
Programozási módszertan. Mohó algoritmusok
 PM-08 p. 1/17 Programozási módszertan Mohó algoritmusok Werner Ágnes Villamosmérnöki és Információs Rendszerek Tanszék e-mail: werner.agnes@virt.uni-pannon.hu PM-08 p. 2/17 Bevezetés Dinamikus programozás
PM-08 p. 1/17 Programozási módszertan Mohó algoritmusok Werner Ágnes Villamosmérnöki és Információs Rendszerek Tanszék e-mail: werner.agnes@virt.uni-pannon.hu PM-08 p. 2/17 Bevezetés Dinamikus programozás
Regresszió. Csorba János. Nagyméretű adathalmazok kezelése március 31.
 Regresszió Csorba János Nagyméretű adathalmazok kezelése 2010. március 31. A feladat X magyarázó attribútumok halmaza Y magyarázandó attribútumok) Kérdés: f : X -> Y a kapcsolat pár tanítópontban ismert
Regresszió Csorba János Nagyméretű adathalmazok kezelése 2010. március 31. A feladat X magyarázó attribútumok halmaza Y magyarázandó attribútumok) Kérdés: f : X -> Y a kapcsolat pár tanítópontban ismert
Számítógépes képelemzés 7. előadás. Dr. Balázs Péter SZTE, Képfeldolgozás és Számítógépes Grafika Tanszék
 Számítógépes képelemzés 7. előadás Dr. Balázs Péter SZTE, Képfeldolgozás és Számítógépes Grafika Tanszék Momentumok Momentum-alapú jellemzők Tömegközéppont Irányultáság 1 2 tan 2 1 2,0 1,1 0, 2 Befoglaló
Számítógépes képelemzés 7. előadás Dr. Balázs Péter SZTE, Képfeldolgozás és Számítógépes Grafika Tanszék Momentumok Momentum-alapú jellemzők Tömegközéppont Irányultáság 1 2 tan 2 1 2,0 1,1 0, 2 Befoglaló
Algoritmizálás, adatmodellezés tanítása 8. előadás
 Algoritmizálás, adatmodellezés tanítása 8. előadás Elágazás és korlátozás A backtrack alkalmas-e optimális megoldás keresésére? Van költség, és a legkisebb költségű megoldást szeretnénk előállítani. Van
Algoritmizálás, adatmodellezés tanítása 8. előadás Elágazás és korlátozás A backtrack alkalmas-e optimális megoldás keresésére? Van költség, és a legkisebb költségű megoldást szeretnénk előállítani. Van
BAGME11NNF Munkavédelmi mérnökasszisztens Galla Jánosné, 2011.
 BAGME11NNF Munkavédelmi mérnökasszisztens Galla Jánosné, 2011. 1 Mérési hibák súlya és szerepe a mérési eredményben A mérési hibák csoportosítása A hiba rendűsége Mérési bizonytalanság Standard és kiterjesztett
BAGME11NNF Munkavédelmi mérnökasszisztens Galla Jánosné, 2011. 1 Mérési hibák súlya és szerepe a mérési eredményben A mérési hibák csoportosítása A hiba rendűsége Mérési bizonytalanság Standard és kiterjesztett
Gépi tanulás a gyakorlatban. Kiértékelés és Klaszterezés
 Gépi tanulás a gyakorlatban Kiértékelés és Klaszterezés Hogyan alkalmazzuk sikeresen a gépi tanuló módszereket? Hogyan válasszuk az algoritmusokat? Hogyan hangoljuk a paramétereiket? Precízebben: Tegyük
Gépi tanulás a gyakorlatban Kiértékelés és Klaszterezés Hogyan alkalmazzuk sikeresen a gépi tanuló módszereket? Hogyan válasszuk az algoritmusokat? Hogyan hangoljuk a paramétereiket? Precízebben: Tegyük
Kereső algoritmusok a diszkrét optimalizálás problémájához
 Többszálú, többmagos architektúrák és programozásuk Óbudai Egyetem, Neumann János Informatikai Kar Kereső algoritmusok a diszkrét optimalizálás problémájához A diszkrét optimalizálási probléma Soros megoldás
Többszálú, többmagos architektúrák és programozásuk Óbudai Egyetem, Neumann János Informatikai Kar Kereső algoritmusok a diszkrét optimalizálás problémájához A diszkrét optimalizálási probléma Soros megoldás
Konjugált gradiens módszer
 Közelítő és szimbolikus számítások 12. gyakorlat Konjugált gradiens módszer Készítette: Gelle Kitti Csendes Tibor Vinkó Tamás Faragó István Horváth Róbert jegyzetei alapján 1 LINEÁRIS EGYENLETRENDSZEREK
Közelítő és szimbolikus számítások 12. gyakorlat Konjugált gradiens módszer Készítette: Gelle Kitti Csendes Tibor Vinkó Tamás Faragó István Horváth Róbert jegyzetei alapján 1 LINEÁRIS EGYENLETRENDSZEREK
Mérési hibák 2006.10.04. 1
 Mérési hibák 2006.10.04. 1 Mérés jel- és rendszerelméleti modellje Mérési hibák_labor/2 Mérési hibák mérési hiba: a meghatározandó értékre a mérés során kapott eredmény és ideális értéke közötti különbség
Mérési hibák 2006.10.04. 1 Mérés jel- és rendszerelméleti modellje Mérési hibák_labor/2 Mérési hibák mérési hiba: a meghatározandó értékre a mérés során kapott eredmény és ideális értéke közötti különbség
Bevezetés az informatikába
 Bevezetés az informatikába 6. előadás Dr. Istenes Zoltán Eötvös Loránd Tudományegyetem Informatikai Kar Programozáselmélet és Szoftvertechnológiai Tanszék Matematikus BSc - I. félév / 2008 / Budapest Dr.
Bevezetés az informatikába 6. előadás Dr. Istenes Zoltán Eötvös Loránd Tudományegyetem Informatikai Kar Programozáselmélet és Szoftvertechnológiai Tanszék Matematikus BSc - I. félév / 2008 / Budapest Dr.
FEGYVERNEKI SÁNDOR, Valószínűség-sZÁMÍTÁs És MATEMATIKAI
 FEGYVERNEKI SÁNDOR, Valószínűség-sZÁMÍTÁs És MATEMATIKAI statisztika 10 X. SZIMULÁCIÓ 1. VÉLETLEN számok A véletlen számok fontos szerepet játszanak a véletlen helyzetek generálásában (pénzérme, dobókocka,
FEGYVERNEKI SÁNDOR, Valószínűség-sZÁMÍTÁs És MATEMATIKAI statisztika 10 X. SZIMULÁCIÓ 1. VÉLETLEN számok A véletlen számok fontos szerepet játszanak a véletlen helyzetek generálásában (pénzérme, dobókocka,
Képrekonstrukció 6. előadás
 Képrekonstrukció 6. előadás Balázs Péter Képfeldolgozás és Számítógépes Grafika Tanszék Szegedi Tudományegyetem Diszkrét tomográfia (DT) A CT-hez több száz vetület szükséges időigényes költséges károsíthatja
Képrekonstrukció 6. előadás Balázs Péter Képfeldolgozás és Számítógépes Grafika Tanszék Szegedi Tudományegyetem Diszkrét tomográfia (DT) A CT-hez több száz vetület szükséges időigényes költséges károsíthatja
Véletlenszám generátorok és tesztelésük. Tossenberger Tamás
 Véletlenszám generátorok és tesztelésük Tossenberger Tamás Érdekességek Pénzérme feldobó gép: $0,25-os érme 1/6000 valószínűséggel esik az élére 51% eséllyel érkezik a felfelé mutató oldalára Pörgetésnél
Véletlenszám generátorok és tesztelésük Tossenberger Tamás Érdekességek Pénzérme feldobó gép: $0,25-os érme 1/6000 valószínűséggel esik az élére 51% eséllyel érkezik a felfelé mutató oldalára Pörgetésnél
22. GRÁFOK ÁBRÁZOLÁSA
 22. GRÁFOK ÁBRÁZOLÁSA A megoldandó feladatok, problémák modellezése során sokszor gráfokat alkalmazunk. A gráf fogalmát a matematikából ismertnek vehetjük. A modellezés során a gráfok több változata is
22. GRÁFOK ÁBRÁZOLÁSA A megoldandó feladatok, problémák modellezése során sokszor gráfokat alkalmazunk. A gráf fogalmát a matematikából ismertnek vehetjük. A modellezés során a gráfok több változata is
Kétszemélyes játékok
 Mesterséges Intelligencia alapjai, gyakorlat Eötvös Loránd Tudományegyetem Informatikai Kar Programozáselmélet és Szoftvertechnológiai Tanszék 2010 / udapest Kétszemélyes teljes információjú játékok két
Mesterséges Intelligencia alapjai, gyakorlat Eötvös Loránd Tudományegyetem Informatikai Kar Programozáselmélet és Szoftvertechnológiai Tanszék 2010 / udapest Kétszemélyes teljes információjú játékok két
Gráfalgoritmusok ismétlés ősz
 Gráfalgoritmusok ismétlés 2017. ősz Gráfok ábrázolása Egy G = (V, E) gráf ábrázolására alapvetően két módszert szoktak használni: szomszédsági listákat, illetve szomszédsági mátrixot. A G = (V, E) gráf
Gráfalgoritmusok ismétlés 2017. ősz Gráfok ábrázolása Egy G = (V, E) gráf ábrázolására alapvetően két módszert szoktak használni: szomszédsági listákat, illetve szomszédsági mátrixot. A G = (V, E) gráf
26. MINIMÁLIS KÖLTSÉGŰ UTAK MINDEN CSÚCSPÁRRA
 26. MINIMÁLIS KÖLTSÉGŰ UTAK MINDEN CSÚCSPÁRRA Az előző két fejezetben tárgyalt feladat általánosításaként a gráfban található összes csúcspárra szeretnénk meghatározni a legkisebb költségű utat. A probléma
26. MINIMÁLIS KÖLTSÉGŰ UTAK MINDEN CSÚCSPÁRRA Az előző két fejezetben tárgyalt feladat általánosításaként a gráfban található összes csúcspárra szeretnénk meghatározni a legkisebb költségű utat. A probléma
A maximum likelihood becslésről
 A maximum likelihood becslésről Definíció Parametrikus becsléssel foglalkozunk. Adott egy modell, mellyel elképzeléseink szerint jól leírható a meghatározni kívánt rendszer. (A modell típusának és rendszámának
A maximum likelihood becslésről Definíció Parametrikus becsléssel foglalkozunk. Adott egy modell, mellyel elképzeléseink szerint jól leírható a meghatározni kívánt rendszer. (A modell típusának és rendszámának
Algoritmuselmélet 2. előadás
 Algoritmuselmélet 2. előadás Katona Gyula Y. Budapesti Műszaki és Gazdaságtudományi Egyetem Számítástudományi Tsz. I. B. 137/b kiskat@cs.bme.hu 2002 Február 12. ALGORITMUSELMÉLET 2. ELŐADÁS 1 Buborék-rendezés
Algoritmuselmélet 2. előadás Katona Gyula Y. Budapesti Műszaki és Gazdaságtudományi Egyetem Számítástudományi Tsz. I. B. 137/b kiskat@cs.bme.hu 2002 Február 12. ALGORITMUSELMÉLET 2. ELŐADÁS 1 Buborék-rendezés
Gépi tanulás. Hány tanítómintára van szükség? VKH. Pataki Béla (Bolgár Bence)
") Gépi tanulás Hány tanítómintára van szükség? VKH Pataki Béla (Bolgár Bence) BME I.E. 414, 463-26-79 pataki@mit.bme.hu, http://www.mit.bme.hu/general/staff/pataki Induktív tanulás A tanítás folyamata: Kiinduló
Gépi tanulás Hány tanítómintára van szükség? VKH Pataki Béla (Bolgár Bence) BME I.E. 414, 463-26-79 pataki@mit.bme.hu, http://www.mit.bme.hu/general/staff/pataki Induktív tanulás A tanítás folyamata: Kiinduló
Algoritmizálás, adatmodellezés tanítása 7. előadás
 Algoritmizálás, adatmodellezés tanítása 7. előadás Oszd meg és uralkodj! Több részfeladatra bontás, amelyek hasonlóan oldhatók meg, lépései: a triviális eset (amikor nincs rekurzív hívás) felosztás (megadjuk
Algoritmizálás, adatmodellezés tanítása 7. előadás Oszd meg és uralkodj! Több részfeladatra bontás, amelyek hasonlóan oldhatók meg, lépései: a triviális eset (amikor nincs rekurzív hívás) felosztás (megadjuk
További forgalomirányítási és szervezési játékok. 1. Nematomi forgalomirányítási játék
 További forgalomirányítási és szervezési játékok 1. Nematomi forgalomirányítási játék A forgalomirányítási játékban adott egy hálózat, ami egy irányított G = (V, E) gráf. A gráfban megengedjük, hogy két
További forgalomirányítási és szervezési játékok 1. Nematomi forgalomirányítási játék A forgalomirányítási játékban adott egy hálózat, ami egy irányított G = (V, E) gráf. A gráfban megengedjük, hogy két
Mesterséges intelligencia 3. laborgyakorlat
 Mesterséges intelligencia 3. laborgyakorlat Kétszemélyes játékok - Minimax A következő típusú játékok megoldásával foglalkozunk: (a) kétszemélyes, (b) determinisztikus, (c) zéróösszegű, (d) teljes információjú.
Mesterséges intelligencia 3. laborgyakorlat Kétszemélyes játékok - Minimax A következő típusú játékok megoldásával foglalkozunk: (a) kétszemélyes, (b) determinisztikus, (c) zéróösszegű, (d) teljes információjú.
Algoritmusok és adatszerkezetek gyakorlat 07
 Algoritmusok és adatszerkezetek gyakorlat 0 Keresőfák Fák Fa: összefüggő, körmentes gráf, melyre igaz, hogy: - (Általában) egy gyökér csúcsa van, melynek 0 vagy több részfája van - Pontosan egy út vezet
Algoritmusok és adatszerkezetek gyakorlat 0 Keresőfák Fák Fa: összefüggő, körmentes gráf, melyre igaz, hogy: - (Általában) egy gyökér csúcsa van, melynek 0 vagy több részfája van - Pontosan egy út vezet
Bánsághi Anna 2014 Bánsághi Anna 1 of 68
 IMPERATÍV PROGRAMOZÁS Bánsághi Anna anna.bansaghi@mamikon.net 3. ELŐADÁS - PROGRAMOZÁSI TÉTELEK 2014 Bánsághi Anna 1 of 68 TEMATIKA I. ALAPFOGALMAK, TUDOMÁNYTÖRTÉNET II. IMPERATÍV PROGRAMOZÁS Imperatív
IMPERATÍV PROGRAMOZÁS Bánsághi Anna anna.bansaghi@mamikon.net 3. ELŐADÁS - PROGRAMOZÁSI TÉTELEK 2014 Bánsághi Anna 1 of 68 TEMATIKA I. ALAPFOGALMAK, TUDOMÁNYTÖRTÉNET II. IMPERATÍV PROGRAMOZÁS Imperatív
Atomerőművi reaktor töltettervezése, mint optimalizációs probléma. de a mai órán leginkább játszani fogunk
 Atomerőművi reaktor töltettervezése, mint optimalizációs probléma de a mai órán leginkább játszani fogunk Üzemanyagcsere általában Ciklikus működésű reaktorok : PWR,BWR ciklus (kampány) hosszát meghatározzák
Atomerőművi reaktor töltettervezése, mint optimalizációs probléma de a mai órán leginkább játszani fogunk Üzemanyagcsere általában Ciklikus működésű reaktorok : PWR,BWR ciklus (kampány) hosszát meghatározzák
Operációkutatás vizsga
 Operációkutatás vizsga A csoport Budapesti Corvinus Egyetem 2007. január 9. Egyéb gyakorló és vizsgaanyagok találhatók a honlapon a Letölthető vizsgasorok, segédanyagok menüpont alatt. OPERÁCIÓKUTATÁS
Operációkutatás vizsga A csoport Budapesti Corvinus Egyetem 2007. január 9. Egyéb gyakorló és vizsgaanyagok találhatók a honlapon a Letölthető vizsgasorok, segédanyagok menüpont alatt. OPERÁCIÓKUTATÁS
Visszalépéses keresés
 Visszalépéses keresés Backtracking előadás http://nik.uni-obuda.hu/prog2 Szénási Sándor szenasi.sandor@nik.uni-obuda.hu Óbudai Egyetem,Neumann János Informatikai Kar Alapvető működése Továbbfejlesztési
Visszalépéses keresés Backtracking előadás http://nik.uni-obuda.hu/prog2 Szénási Sándor szenasi.sandor@nik.uni-obuda.hu Óbudai Egyetem,Neumann János Informatikai Kar Alapvető működése Továbbfejlesztési
Gráfok 1. Tárolási módok, bejárások. Szoftvertervezés és -fejlesztés II. előadás. Szénási Sándor
 Gráfok 1. Tárolási módok, bejárások előadás http://nik.uni-obuda.hu/sztf2 Szénási Sándor szenasi.sandor@nik.uni-obuda.hu Óbudai Egyetem,Neumann János Informatikai Kar Gráfok 1. Tárolási módok Szélességi
Gráfok 1. Tárolási módok, bejárások előadás http://nik.uni-obuda.hu/sztf2 Szénási Sándor szenasi.sandor@nik.uni-obuda.hu Óbudai Egyetem,Neumann János Informatikai Kar Gráfok 1. Tárolási módok Szélességi
Gráfok, definíciók. Gráfok ábrázolása. Az adott probléma megoldásához ténylegesen mely műveletek szükségesek. Ábrázolások. Példa:
 Gráfok, definíciók Irányítatlan gráf: G = (V,E), ahol E rendezetlen (a,b),a,b V párok halmaza. Irányított gráf: G = (V,E) E rendezett (a,b) párok halmaza; E V V. Címkézett (súlyozott) gráf: G = (V,E,C)
Gráfok, definíciók Irányítatlan gráf: G = (V,E), ahol E rendezetlen (a,b),a,b V párok halmaza. Irányított gráf: G = (V,E) E rendezett (a,b) párok halmaza; E V V. Címkézett (súlyozott) gráf: G = (V,E,C)
NEM-DETERMINISZTIKUS PROGRAMOK HELYESSÉGE. Szekvenciális programok kategóriái. Hoare-Dijkstra-Gries módszere
 Szekvenciális programok kategóriái strukturálatlan strukturált NEM-DETERMINISZTIKUS PROGRAMOK HELYESSÉGE Hoare-Dijkstra-Gries módszere determinisztikus valódi korai nem-determinisztikus általános fejlett
Szekvenciális programok kategóriái strukturálatlan strukturált NEM-DETERMINISZTIKUS PROGRAMOK HELYESSÉGE Hoare-Dijkstra-Gries módszere determinisztikus valódi korai nem-determinisztikus általános fejlett
6. Előadás. Vereb György, DE OEC BSI, október 12.
 6. Előadás Visszatekintés: a normális eloszlás Becslés, mintavételezés Reprezentatív minta A statisztika, mint változó Paraméter és Statisztika Torzítatlan becslés A mintaközép eloszlása - centrális határeloszlás
6. Előadás Visszatekintés: a normális eloszlás Becslés, mintavételezés Reprezentatív minta A statisztika, mint változó Paraméter és Statisztika Torzítatlan becslés A mintaközép eloszlása - centrális határeloszlás
Universität M Mis is k k olol cic, F Eg a y kultä etem t, für Wi Gazda rts ságcha tudfts o w máis n s yen i scha Kar, ften,
 8. Előadás Speciális optimalizációs eljárások Genetikus algoritmusok OPTIMALIZÁLÁSI ELJÁRÁSOK Gradiens alapú módszerek Véletlent használó módszerek Kimerítő keresésen alapuló módszerek Direkt módszerek
8. Előadás Speciális optimalizációs eljárások Genetikus algoritmusok OPTIMALIZÁLÁSI ELJÁRÁSOK Gradiens alapú módszerek Véletlent használó módszerek Kimerítő keresésen alapuló módszerek Direkt módszerek
Programozás alapjai 9. előadás. Wagner György Általános Informatikai Tanszék
 9. előadás Wagner György Általános Informatikai Tanszék Leszámoló rendezés Elve: a rendezett listában a j-ik kulcs pontosan j-1 kulcsnál lesz nagyobb. (Ezért ha egy kulcsról tudjuk, hogy 27 másiknál nagyobb,
9. előadás Wagner György Általános Informatikai Tanszék Leszámoló rendezés Elve: a rendezett listában a j-ik kulcs pontosan j-1 kulcsnál lesz nagyobb. (Ezért ha egy kulcsról tudjuk, hogy 27 másiknál nagyobb,
Felvételi tematika INFORMATIKA
 Felvételi tematika INFORMATIKA 2016 FEJEZETEK 1. Természetes számok feldolgozása számjegyenként. 2. Számsorozatok feldolgozása elemenként. Egydimenziós tömbök. 3. Mátrixok feldolgozása elemenként/soronként/oszloponként.
Felvételi tematika INFORMATIKA 2016 FEJEZETEK 1. Természetes számok feldolgozása számjegyenként. 2. Számsorozatok feldolgozása elemenként. Egydimenziós tömbök. 3. Mátrixok feldolgozása elemenként/soronként/oszloponként.
Specifikáció alapú teszttervezési módszerek
 Szoftverellenőrzési technikák Specifikáció alapú teszttervezési módszerek Majzik István, Micskei Zoltán http://www.inf.mit.bme.hu/ 1 Klasszikus tesztelési feladat A tesztelendő program beolvas 3 egész
Szoftverellenőrzési technikák Specifikáció alapú teszttervezési módszerek Majzik István, Micskei Zoltán http://www.inf.mit.bme.hu/ 1 Klasszikus tesztelési feladat A tesztelendő program beolvas 3 egész
1. tétel. 1. Egy derékszögű háromszög egyik szöge 50, a szög melletti befogója 7 cm. Mekkora a háromszög átfogója? (4 pont)
") 1. tétel 1. Egy derékszögű háromszög egyik szöge 50, a szög melletti befogója cm. Mekkora a háromszög átfogója? (4 pont). Adott az ábrán két vektor. Rajzolja meg a b, a b és az a b vektorokat! (6 pont)
1. tétel 1. Egy derékszögű háromszög egyik szöge 50, a szög melletti befogója cm. Mekkora a háromszög átfogója? (4 pont). Adott az ábrán két vektor. Rajzolja meg a b, a b és az a b vektorokat! (6 pont)
A mesterséges intelligencia alapjai
 A mesterséges intelligencia alapjai Mihálydeák Tamás Számítógéptudományi Tanszék, Informatikai Kar Debreceni Egyetem e-mail: mihalydeak.tamas@inf.unideb.hu https://arato.inf.unideb.hu/mihalydeak.tamas/
A mesterséges intelligencia alapjai Mihálydeák Tamás Számítógéptudományi Tanszék, Informatikai Kar Debreceni Egyetem e-mail: mihalydeak.tamas@inf.unideb.hu https://arato.inf.unideb.hu/mihalydeak.tamas/
24. MINIMÁLIS KÖLTSÉGŰ UTAK I.
 24. MINIMÁLIS KÖLTSÉGŰ UTAK I. Az útvonaltervezés az egyik leggyakrabban végrehajtott eljárása a gráfok alkalmazásai körében. A feladat például a közlekedésben jelentkezik. A gráfot itt az a térkép jelenti,
24. MINIMÁLIS KÖLTSÉGŰ UTAK I. Az útvonaltervezés az egyik leggyakrabban végrehajtott eljárása a gráfok alkalmazásai körében. A feladat például a közlekedésben jelentkezik. A gráfot itt az a térkép jelenti,
file:///d:/okt/ad/jegyzet/ad1/b+fa.html
 1 / 5 2016. 11. 30. 12:58 B+ fák CSci 340: Database & Web systems Home Syllabus Readings Assignments Tests Links Computer Science Hendrix College Az alábbiakban Dr. Carl Burch B+-trees című Internetes
1 / 5 2016. 11. 30. 12:58 B+ fák CSci 340: Database & Web systems Home Syllabus Readings Assignments Tests Links Computer Science Hendrix College Az alábbiakban Dr. Carl Burch B+-trees című Internetes