UAV fejlesztések és kutatás
|
|
|
- Csenge Kerekes
- 5 évvel ezelőtt
- Látták:
Átírás
1 UAV fejlesztések és kutatás MTA-SZTAKI Rendszer- és Irányításelméleti Kutatólaboratórium Prof. Bokor József Vanek Bálint, Bauer Péter ), Gőzse István )

2 Pilóta nélküli repülőgép rendszerek piaci perspektívái
3 Mire kellenek a UAV-k? Polgári felhasználás: Katasztrófavédelem (árvíz, erdőtűz, légszennyezés stb. figyelése, mérése) Tudományos kutatás (meteorológia stb.) Rendészeti feladatok (zavargások, határvédelem) Katonai felhasználás: Felderítés, információ szerzés Harci alkalmazások
4 Erdőtűz figyelése Marvin helicopter Tömeg: 11 kg Hasznos terhelés: 5-7 kg Rotor átmérő: 1,8 m Hossz: 1,65 m
5 Meteorológiai kutatás, felderítés Global Hawk Tömeg: kg Hatótávolság: km Hasznos terhelés: 1360 kg Fesztávolság: 40 m Maximális rep. magasság: m
6 Harci alkalmazás MQ-9 Reaper (Predator) Tömeg: 4540 kg Hasznos terhelés: 200 kg + fegyverek Fesztávolság: 20 m Maximális rep. magasság: m



7 Robotrepülőgép rendszer fő komponensei Földi állomás A tudomány részéről főleg új algoritmusok fejlesztése, tesztelése, új koncepciók bizonyítása a feladat és a cél, nem a piacképes repülőgép rendszer
8 Robotrepülőgép rendszer fejlesztés fő lépései 1. A repülőgép kiválasztása (felépítés, teherbírás) 2. A rendszer kalibrálása 3. Modellalkotás (számítások, szélcsatorna és egyéb mérések, repülés közbeni mérések) 4. A szabályozási algoritmus (gyakorlatilag programkód) megtervezése és fedélzeti számítógépre vitele 5. Földi tesztelés: 1. HIL (hardware in the loop) tesztek 2. Fedélzeti tesztek 6. Légi tesztelés


9 Repülőgépek E-flite Ultrastick 25e 1.25m 2kg Orca 3m 10kg

10 Repülőgépek Sindy 3,5m 10kg




11 Navigációs szenzorok Kész termék megvétele (használata könnyű, gyors, de részletes működése ismeretlen) Saját fejlesztés (hosszabb, lassabb, de működése minden részletében ismert) mnav SZTAKI_1 SZTAKI_2

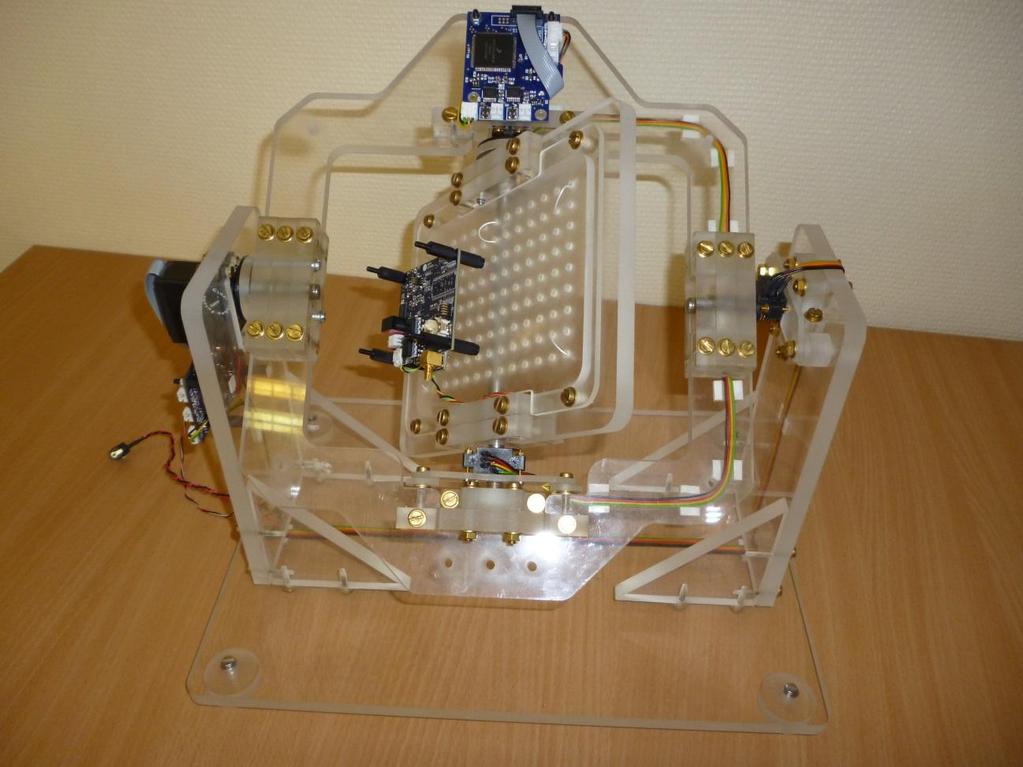
12 Szenzorok kalibrálása

13 Rendszer identifikáció mérésekből

14 Szabályozási feladatok Stabilizáló szabályzás (bedöntés, bólintás) Szög referenciajelek követése Sebesség / magasság tartás Útvonal pontok, vagy kötött útvonal követése Látni és elkerülni feladat megoldása Phycore MPC5200 / 400MHz Phycore MPC555 / 40MHz




15 Hardware-in-the-loop szimuláció 2.4 GHz antenna felépítése 2.4 GHz FASST vevő csűrő Fedélzeti számítógép PWM jelek MUX magassági korm. 2.4 GHz antenna PhyCore MPC555 PWM jelek oldalkormány Vezeték nélküli modem soros vonal Szenzor egység + repülőgép Földi állomás Digi XStream 2.4 GHz


16 Menjünk repülni!
17 Bárhol / bármikor repülhetünk? UAV reptetés feltételei: 1. Felelősségbiztosítás 2. Légtér igénylés és bejelentés (lakott terület / emberek felett nem) 3. Képzett pilóta és személyzet 4. Látótávolságon belül maradni A teljes szabályozás kidolgozása jelenleg zajlik
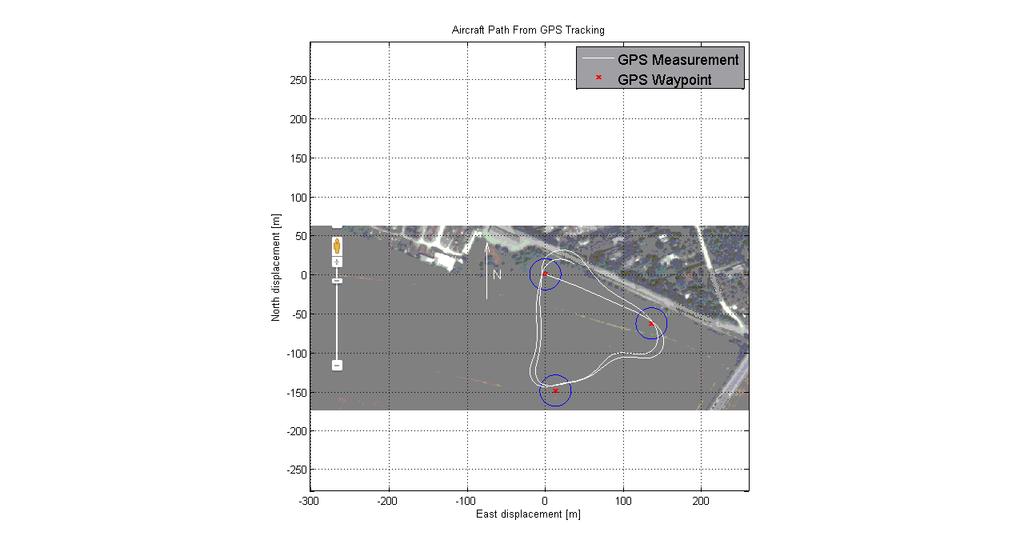
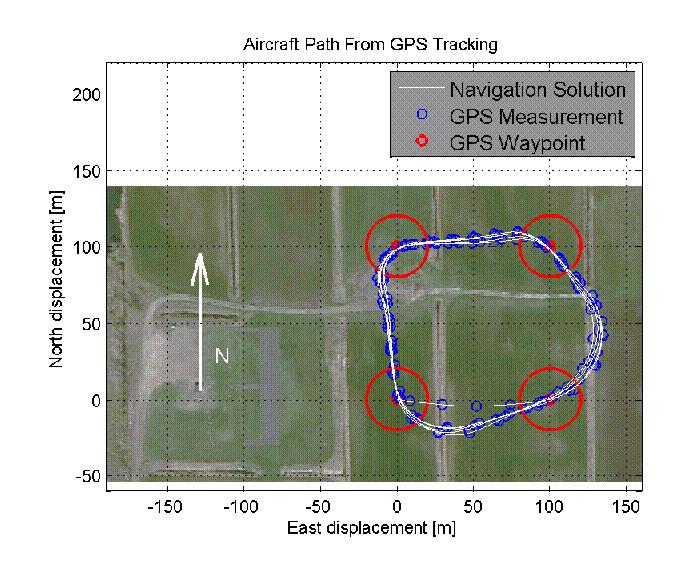
18 GPS koordináták közti repülés

19 Kutató-mentő útvonal követése

20 És ha már jól repülünk az elég?
 repülőgép felderítése (radar /")

21 Érzékelés és elkerülés ONR (USA) program, célok: A másik (közeli) repülőgép felderítése (radar / kamera) Kamera képből a veszélyesség eldöntése Elkerülő manőver, a gép által végrehajtható tartományon belül



22 Sikeres elkerülés december Kamerát hordozó nagy repülőgép 1. kerülte ki A kisrepülőgépet 2. Kritikus szituáció A kisrepülőgép felderítése sokkal nehezebb 1. 2.
 aileron fault unintended roll, increased drag captured by analytic redundancy via math.")
23 1. High-fidelity Computer Models Addsafe EU FP7 2. Functional Engineering Simulators 3. To pilot-in-theloop environments 4. Aircraft-inthe-loop (Iron Bird) aileron fault unintended roll, increased drag captured by analytic redundancy via math. model of A/C

24 ACTUATION 2015 (Level 2 EU FP7) Modular Electro Mechanical Actuators for aircraft and helicopters towards the Full Electric Aircraft Rotary ema 55 Partners including all major stakeholders in the actuation and airframe sectors in the EU Develop and validate a common set of standardised, modular and scalable EMA resources for all actuators Standardising EMA modules (motors, power drive electronics, mechanics, sensing) Model based design to meet cost and reliability Advanced control and monitoring concepts
 technologies")


25 REconfiguration of CONtrol in Flight for Integral Global Upset REcovery present future Investigate and develop aircraft guidance and control (G&C) technologies that facilitate the automated handling of off-nominal/abnormal events and optimize the aircraft status and flight. The automatism of the G&C help alleviating the pilots' task and optimize performance by automatically reconfiguring the aircraft to its optimal flight condition, while maintaining the current aircraft safety levels.


26 SZTAKI FLEXOP Flutter Free FLight Envelope expansion for economical Performance improvement AGI-G AGI-UK DLR FACC INASCO TUD TUM UOB
UAV FEJLESZTÉSEK ÉS KUTATÁS AZ MTA SZTAKI-BAN
 UAV FEJLESZTÉSEK ÉS KUTATÁS AZ MTA SZTAKI-BAN Bokor József (bokor@sztaki.hu), Vanek Bálint, Bauer Péter (bauer.peter@sztaki.hu ) MTA-SZTAKI, Rendszer- és Irányításelméleti Kutatólaboratórium Automatikus
UAV FEJLESZTÉSEK ÉS KUTATÁS AZ MTA SZTAKI-BAN Bokor József (bokor@sztaki.hu), Vanek Bálint, Bauer Péter (bauer.peter@sztaki.hu ) MTA-SZTAKI, Rendszer- és Irányításelméleti Kutatólaboratórium Automatikus
Prof. Bokor József az MTA rendes tagja
 Rendszer és Irányításelméleti Kutató Labor Laborvezető: Prof. Bokor József az MTA rendes tagja Beágyazott és Autonóm Rendszerek Labor Vezető: Soumelidis Alexandros, PhD Kutatók: Edelmayer András, MTA Dr
Rendszer és Irányításelméleti Kutató Labor Laborvezető: Prof. Bokor József az MTA rendes tagja Beágyazott és Autonóm Rendszerek Labor Vezető: Soumelidis Alexandros, PhD Kutatók: Edelmayer András, MTA Dr
Mesterséges intelligencia az önvezető autók világában. Takács Árpád. arpad.takacs@adasworks.com
 Mesterséges intelligencia az önvezető autók világában Takács Árpád arpad.takacs@adasworks.com I. Commsignia BME HIT autonóm járműtechnológiák workshop, Budapest, 2016. május 11. Rólunk Automatizált vezetés
Mesterséges intelligencia az önvezető autók világában Takács Árpád arpad.takacs@adasworks.com I. Commsignia BME HIT autonóm járműtechnológiák workshop, Budapest, 2016. május 11. Rólunk Automatizált vezetés
Multifunkciós pilóta nélküli repülőgépek fejlesztési eredményei a BHE Kft-nél
 Multifunkciós pilóta nélküli repülőgépek fejlesztési eredményei a BHE Kft-nél Dr. Kazi Károly, Mikó Gyula 2014. november 21. BHE Bonn Hungary Elektronikai Kft. Történet: Megalapítás 1991-ben Kezdetben
Multifunkciós pilóta nélküli repülőgépek fejlesztési eredményei a BHE Kft-nél Dr. Kazi Károly, Mikó Gyula 2014. november 21. BHE Bonn Hungary Elektronikai Kft. Történet: Megalapítás 1991-ben Kezdetben
Drónok alkalmazása a katasztrófavédelemben. Készítette: Dr. Restás Ágoston Budapest, február 23.
 Drónok alkalmazása a katasztrófavédelemben Tartalom A kezdetek, avagy egy kis történeti áttekintés - ami eddig történt az előadó szemszögéből A drónok és szinonimáinak osztályozása, képességeik A katasztrófák
Drónok alkalmazása a katasztrófavédelemben Tartalom A kezdetek, avagy egy kis történeti áttekintés - ami eddig történt az előadó szemszögéből A drónok és szinonimáinak osztályozása, képességeik A katasztrófák
WRC-15. A WRC-15 Rádiótávközlési Világértekezlet 1.5 és 1.16 napirendi pontjaira történő felkészülés helyzete. Koroncz László
 WRC-15 Koroncz László spektrumgazdálkodási mérnök Védelmi és Rendészeti Frekvenciagazdálkodási Főosztály Spektrumgazdálkodási és NATO Osztály A WRC-15 Rádiótávközlési Világértekezlet 1.5 és 1.16 napirendi
WRC-15 Koroncz László spektrumgazdálkodási mérnök Védelmi és Rendészeti Frekvenciagazdálkodási Főosztály Spektrumgazdálkodási és NATO Osztály A WRC-15 Rádiótávközlési Világértekezlet 1.5 és 1.16 napirendi
A repülés világa a motoros repülőgépektől a drónokig.
 A repülés világa a motoros repülőgépektől a drónokig. 1903. a kezdet. tíznél alig több másodpercig a levegőben repült a REPÜLŐGÉP Néhány adat: Motor: 12 LE, vízhűtéses benzinmotor Fesztáv: 12.3 méter Hossz:
A repülés világa a motoros repülőgépektől a drónokig. 1903. a kezdet. tíznél alig több másodpercig a levegőben repült a REPÜLŐGÉP Néhány adat: Motor: 12 LE, vízhűtéses benzinmotor Fesztáv: 12.3 méter Hossz:
Automatikus Fedélzeti Irányító Rendszerek. Navigációs rendszerek a pilóta szemszögéből Tóth Gábor
 Automatikus Fedélzeti Irányító Rendszerek Navigációs rendszerek a pilóta szemszögéből Tóth Gábor VFR Visual Flight Rules A navigáció folyamatos földlátást igényel Minimálisan 5 km látástávolság szükséges
Automatikus Fedélzeti Irányító Rendszerek Navigációs rendszerek a pilóta szemszögéből Tóth Gábor VFR Visual Flight Rules A navigáció folyamatos földlátást igényel Minimálisan 5 km látástávolság szükséges
VTOL UAV. Inerciális mérőrendszer kiválasztása vezetőnélküli repülőeszközök számára. Árvai László, Doktorandusz, ZMNE
 Inerciális mérőrendszer kiválasztása vezetőnélküli repülőeszközök számára Árvai László, Doktorandusz, ZMNE Tartalom Fejezet Témakör 1. Vezető nélküli repülőeszközök 2. Inerciális mérőrendszerek feladata
Inerciális mérőrendszer kiválasztása vezetőnélküli repülőeszközök számára Árvai László, Doktorandusz, ZMNE Tartalom Fejezet Témakör 1. Vezető nélküli repülőeszközök 2. Inerciális mérőrendszerek feladata
HIL SZIMULÁCIÓ ROBOTPILÓTA FEJLESZTÉSBEN
 Dr. Molnár András - Stojcsics Dániel HIL SZIMULÁCIÓ ROBOTPILÓTA FEJLESZTÉSBEN Bevezető Pilóta nélküli robotrepülőgéppel végzett kutatás és fejlesztés elengedhetetlen része a tesztelés. Az időjárási feltételek
Dr. Molnár András - Stojcsics Dániel HIL SZIMULÁCIÓ ROBOTPILÓTA FEJLESZTÉSBEN Bevezető Pilóta nélküli robotrepülőgéppel végzett kutatás és fejlesztés elengedhetetlen része a tesztelés. Az időjárási feltételek
zturbinák kompresszorának akusztikus
 Mikro-gázturbin zturbinák kompresszorának akusztikus pompázs detektálása Koncz Miklós s Tamás, PhD ROBOTWARFARE 9 1 Gazdaságos egyensúlyozó gép tervezése pilóta nélküli repülőgépek gázturbinájához Koncz
Mikro-gázturbin zturbinák kompresszorának akusztikus pompázs detektálása Koncz Miklós s Tamás, PhD ROBOTWARFARE 9 1 Gazdaságos egyensúlyozó gép tervezése pilóta nélküli repülőgépek gázturbinájához Koncz
Beltéri autonóm négyrotoros helikopter szabályozó rendszerének kifejlesztése és hardware-in-the-loop tesztelése
 Beltéri autonóm négyrotoros helikopter szabályozó rendszerének kifejlesztése és hardware-in-the-loop tesztelése Regula Gergely, Lantos Béla BME Villamosmérnöki és Informatikai Kar Irányítástechnika és
Beltéri autonóm négyrotoros helikopter szabályozó rendszerének kifejlesztése és hardware-in-the-loop tesztelése Regula Gergely, Lantos Béla BME Villamosmérnöki és Informatikai Kar Irányítástechnika és
 Ady László hallgató Óbudai Egyetem Kandó Kálmán Villamosmérnöki Kar Műszertechnikai és Automatizálási Intézet ady.laszlo@kvk.uni-obuda.hu orcid.org/0000-0001-6702-6000 Baár Tamás (MSc) tudományos segédmunkatárs
Ady László hallgató Óbudai Egyetem Kandó Kálmán Villamosmérnöki Kar Műszertechnikai és Automatizálási Intézet ady.laszlo@kvk.uni-obuda.hu orcid.org/0000-0001-6702-6000 Baár Tamás (MSc) tudományos segédmunkatárs
A FLEXOP Projekt. H2020 MG-1.1-2014 Bodor Virág (PM) & Vanek Bálint (Koord.) MTA SZTAKI
 & Vanek Bálint (Koord.) MTA SZTAKI") A FLEXOP Projekt Flutter Free FLight Envelope expansion for economical Performance improvement H2020 MG-1.1-2014 Bodor Virág (PM) & Vanek Bálint (Koord.) MTA SZTAKI Nemzeti Kutatási, Fejlesztési és Innovációs
A FLEXOP Projekt Flutter Free FLight Envelope expansion for economical Performance improvement H2020 MG-1.1-2014 Bodor Virág (PM) & Vanek Bálint (Koord.) MTA SZTAKI Nemzeti Kutatási, Fejlesztési és Innovációs
pek a Magyar Honvéds
 ZRÍNYI MIKLÓS NEMZETVÉDELMI EGYETEM Bolyai János Katonai Műszaki Kar Információs Műveletek és Elektronikai Hadviselés Tanszék Szárazf razföldi robotok és pilóta nélkn lküli li repülőgépek pek a Magyar
ZRÍNYI MIKLÓS NEMZETVÉDELMI EGYETEM Bolyai János Katonai Műszaki Kar Információs Műveletek és Elektronikai Hadviselés Tanszék Szárazf razföldi robotok és pilóta nélkn lküli li repülőgépek pek a Magyar
A mérnök-informatikus szeret folyamatokban gondolkodni
 A mérnök-informatikus szeret folyamatokban gondolkodni Fokker F.XII (1930) Fokker F.XII (1930) li 2 (1939) Fokker F.XII (1930) li 2 (1939) il 14 (1950) Fokker F.XII (1930) li 2 (1939) il 14 (1950) Concorde
A mérnök-informatikus szeret folyamatokban gondolkodni Fokker F.XII (1930) Fokker F.XII (1930) li 2 (1939) Fokker F.XII (1930) li 2 (1939) il 14 (1950) Fokker F.XII (1930) li 2 (1939) il 14 (1950) Concorde
A KATONAI LÉGIJÁRMŰ RENDSZERMODELLJE A KATONAI LÉGIJÁRMŰ
 Seres György A KATONAI LÉGIJÁRMŰ RENDSZERMODELLJE A rendszerelmélet, mint új tudományos vizsgálati módszer, Angliában keletkezett, a második világháború idején, amikor a német légierő, a Luftwaffe támadásai
Seres György A KATONAI LÉGIJÁRMŰ RENDSZERMODELLJE A rendszerelmélet, mint új tudományos vizsgálati módszer, Angliában keletkezett, a második világháború idején, amikor a német légierő, a Luftwaffe támadásai
VTOL UAV. Moduláris fedélzeti elektronika fejlesztése pilóta nélküli repülőgépek számára. Árvai László, Doktorandusz, ZMNE ÁRVAI LÁSZLÓ, ZMNE
 Moduláris fedélzeti elektronika fejlesztése pilóta nélküli repülőgépek számára Árvai László, Doktorandusz, ZMNE Tartalom Fejezet Témakör 1. Fedélzeti elektronika tulajdonságai 2. Modularitás 3. Funkcionális
Moduláris fedélzeti elektronika fejlesztése pilóta nélküli repülőgépek számára Árvai László, Doktorandusz, ZMNE Tartalom Fejezet Témakör 1. Fedélzeti elektronika tulajdonságai 2. Modularitás 3. Funkcionális
A pilótanélküli légijárművek használatának engedélyezése
 A pilótanélküli légijárművek használatának engedélyezése Országos Meteorológiai Szolgálat Budapest, 2016. október 27. Szenczi Imre, NKH Légügyi Hivatal Témák UAS/RPAS mint légijármű az alkalmazás feltételei
A pilótanélküli légijárművek használatának engedélyezése Országos Meteorológiai Szolgálat Budapest, 2016. október 27. Szenczi Imre, NKH Légügyi Hivatal Témák UAS/RPAS mint légijármű az alkalmazás feltételei
Dinamikus terhelés hatására létrejövő deformáció mérése. Dr. Siki Zoltán Moka Dániel BME Általános- és Felsőgeodézia tanszék siki@agt.bme.
 Dinamikus terhelés hatására létrejövő deformáció mérése Dr. Siki Zoltán Moka Dániel BME Általános- és Felsőgeodézia tanszék siki@agt.bme.hu Áttekintés Előzmények A rendszer komponensei Alkalmazási példák
Dinamikus terhelés hatására létrejövő deformáció mérése Dr. Siki Zoltán Moka Dániel BME Általános- és Felsőgeodézia tanszék siki@agt.bme.hu Áttekintés Előzmények A rendszer komponensei Alkalmazási példák
DRÓNOK HASZNÁLATA A MEZŐGAZDASÁGBAN
 DRÓNOK HASZNÁLATA A MEZŐGAZDASÁGBAN KÖRÖSPARTI JÁNOS NAIK Öntözési és Vízgazdálkodási Önálló Kutatási Osztály (ÖVKI) Szaktanári továbbképzés Szarvas, 2017. december 7. A drónok használata egyre elterjedtebb
DRÓNOK HASZNÁLATA A MEZŐGAZDASÁGBAN KÖRÖSPARTI JÁNOS NAIK Öntözési és Vízgazdálkodási Önálló Kutatási Osztály (ÖVKI) Szaktanári továbbképzés Szarvas, 2017. december 7. A drónok használata egyre elterjedtebb
Hasznos és kártevő rovarok monitorozása innovatív szenzorokkal (LIFE13 ENV/HU/001092)
") Hasznos és kártevő rovarok monitorozása innovatív szenzorokkal (LIFE13 ENV/HU/001092) www.zoolog.hu Dr. Dombos Miklós Tudományos főmunkatárs MTA ATK TAKI Innovative Real-time Monitoring and Pest control
Hasznos és kártevő rovarok monitorozása innovatív szenzorokkal (LIFE13 ENV/HU/001092) www.zoolog.hu Dr. Dombos Miklós Tudományos főmunkatárs MTA ATK TAKI Innovative Real-time Monitoring and Pest control
INTELLIGENS KÖZLEKEDÉSI RENDSZEREK. Dr. Tóth János 2015.11.18.
 INTELLIGENS KÖZLEKEDÉSI RENDSZEREK Dr. Tóth János 2015.11.18. Tartalom ITS definíció, EU direktíva Közúti információs és forgalombefolyásolási rendszerek csoportosítása Statikus és dinamikus rendszerek
INTELLIGENS KÖZLEKEDÉSI RENDSZEREK Dr. Tóth János 2015.11.18. Tartalom ITS definíció, EU direktíva Közúti információs és forgalombefolyásolási rendszerek csoportosítása Statikus és dinamikus rendszerek
Élettartam teszteknél alkalmazott programstruktúra egy váltóvezérlő példáján keresztül
 Élettartam teszteknél alkalmazott programstruktúra egy váltóvezérlő példáján keresztül 1 Tartalom Miről is lesz szó? Bosch GS-TC Automata sebességváltó TCU (Transmission Control Unit) Élettartam tesztek
Élettartam teszteknél alkalmazott programstruktúra egy váltóvezérlő példáján keresztül 1 Tartalom Miről is lesz szó? Bosch GS-TC Automata sebességváltó TCU (Transmission Control Unit) Élettartam tesztek
HCE80/HCC80/HCE80R/HCC80R
 HCE80/HCC80/HCE80R/HCC80R PADLÓFŰTÉSI ZÓNA SZABÁLYZÓK TERMÉK LEÍRÁS TULAJDONSÁGOK Könnyű és gyors telepítés az új vezetékezéssel Dugaszolható csatlakozók kábelszorítóval Integrált szivattyú relé a szivattyú
HCE80/HCC80/HCE80R/HCC80R PADLÓFŰTÉSI ZÓNA SZABÁLYZÓK TERMÉK LEÍRÁS TULAJDONSÁGOK Könnyű és gyors telepítés az új vezetékezéssel Dugaszolható csatlakozók kábelszorítóval Integrált szivattyú relé a szivattyú
Beszámoló szakképzési hozzájárulási támogatás felhasználásáról
 Beszámoló szakképzési hozzájárulási támogatás felhasználásáról Támogató: HungaroControl Magyar Légiforgalmi Szolgálat Zártkörűen Működő Részvénytársaság, 1185 Budapest, Igló u. 33-35. Támogatás összege:
Beszámoló szakképzési hozzájárulási támogatás felhasználásáról Támogató: HungaroControl Magyar Légiforgalmi Szolgálat Zártkörűen Működő Részvénytársaság, 1185 Budapest, Igló u. 33-35. Támogatás összege:
S.M.A.R.T. Forrás:
 Forrás: https://en.wikipedia.org/wiki/s.m.a.r.t. http://www.hdsentinel.hu/smart Mi a S.M.A.R.T.? Self-Monitoring, Analysis and Reporting Technology Ön-ellenőrző Analizáló és Nyilvántartó Technológia IBM
Forrás: https://en.wikipedia.org/wiki/s.m.a.r.t. http://www.hdsentinel.hu/smart Mi a S.M.A.R.T.? Self-Monitoring, Analysis and Reporting Technology Ön-ellenőrző Analizáló és Nyilvántartó Technológia IBM
PILÓTA NÉLKÜLI REPÜLŐGÉPEKKEL SZEMBEN TÁMASZTOTT KÖVETELMÉNYEK VIZSGÁLATA A BRAVO-CSOPORT I. BEVEZETÉS, PROBLÉMAFELVETÉS, AKTUALITÁS
 Dr. habil. Szabolcsi Róbert 1 Mészáros György 2 PILÓTA NÉLKÜLI REPÜLŐGÉPEKKEL SZEMBEN TÁMASZTOTT KÖVETELMÉNYEK VIZSGÁLATA A BRAVO-CSOPORT A pilóta nélküli repülőgépekkel szemben az alkalmazók által támasztott
Dr. habil. Szabolcsi Róbert 1 Mészáros György 2 PILÓTA NÉLKÜLI REPÜLŐGÉPEKKEL SZEMBEN TÁMASZTOTT KÖVETELMÉNYEK VIZSGÁLATA A BRAVO-CSOPORT A pilóta nélküli repülőgépekkel szemben az alkalmazók által támasztott
Robotjárművek alkalmazhatósága az integrált határbiztonsági rendszerben
 Robotjárművek alkalmazhatósága az integrált határbiztonsági rendszerben Lipics László r. őrnagy Kőszegi Rendőrkapitányság Határrendészeti Alosztályvezető 1 "We said why not get a jump start on the initiative
Robotjárművek alkalmazhatósága az integrált határbiztonsági rendszerben Lipics László r. őrnagy Kőszegi Rendőrkapitányság Határrendészeti Alosztályvezető 1 "We said why not get a jump start on the initiative
MAGYAR REPÜLŐ SZÖVETSÉG REPÜLÉSBIZTONSÁGI SZOLGÁLAT ZÁRÓJELENTÉS. 2005-150 sorszámú LÉGIKÖZLEKEDÉSI ESEMÉNYHEZ
 MRSZ-REBISZ eseményszám: MRSZ -001-05 MAGYAR REPÜLŐ SZÖVETSÉG REPÜLÉSBIZTONSÁGI SZOLGÁLAT ZÁRÓJELENTÉS 2005-150 sorszámú LÉGIKÖZLEKEDÉSI ESEMÉNYHEZ Az esemény helye: Budakeszi Az esemény ideje: 2005. 07.
MRSZ-REBISZ eseményszám: MRSZ -001-05 MAGYAR REPÜLŐ SZÖVETSÉG REPÜLÉSBIZTONSÁGI SZOLGÁLAT ZÁRÓJELENTÉS 2005-150 sorszámú LÉGIKÖZLEKEDÉSI ESEMÉNYHEZ Az esemény helye: Budakeszi Az esemény ideje: 2005. 07.
SZIMULÁCIÓ ÉS MODELLEZÉS AZ ANSYS ALKALMAZÁSÁVAL
 SZIMULÁCIÓ ÉS MODELLEZÉS AZ ANSYS ALKALMAZÁSÁVAL MAGYAR TUDOMÁNY NAPJA KONFERENCIA 2010 GÁBOR DÉNES FŐISKOLA CSUKA ANTAL TARTALOM A KÍSÉRLET ÉS MÉRÉS JELENTŐSÉGE A MÉRNÖKI GYAKORLATBAN, MECHANIKAI FESZÜLTSÉG
SZIMULÁCIÓ ÉS MODELLEZÉS AZ ANSYS ALKALMAZÁSÁVAL MAGYAR TUDOMÁNY NAPJA KONFERENCIA 2010 GÁBOR DÉNES FŐISKOLA CSUKA ANTAL TARTALOM A KÍSÉRLET ÉS MÉRÉS JELENTŐSÉGE A MÉRNÖKI GYAKORLATBAN, MECHANIKAI FESZÜLTSÉG
Űrtechnológia október 24. Műholdfedélzeti energiaellátás / 2 Műholdfedélzeti szolgálati rendszerek Felügyeleti, telemetria és telekommand rendsz
 Szélessávú Hírközlés és Villamosságtan Tanszék Űrkutató Csoport Szabó József A fedélzeti energiaellátás kérdései: architektúrák, energiaegyensúly. Űrtechnológia Budapest, 2018. október 24. Űrtechnológia
Szélessávú Hírközlés és Villamosságtan Tanszék Űrkutató Csoport Szabó József A fedélzeti energiaellátás kérdései: architektúrák, energiaegyensúly. Űrtechnológia Budapest, 2018. október 24. Űrtechnológia
GNSS Modernizáció. Horváth Tamás FÖMI Kozmikus Geodéziai Obszervatórium Penc. Tea előadás, 2006. június 1., Penc
 1 GNSS Modernizáció Horváth Tamás FÖMI Kozmikus Geodéziai Obszervatórium Penc Tea előadás, 2006. június 1., Penc Tartalom GPS GLONASS Galileo 2 GPS Block IIR Block IIA Block IIF 3 A GPS pontossága GPS
1 GNSS Modernizáció Horváth Tamás FÖMI Kozmikus Geodéziai Obszervatórium Penc Tea előadás, 2006. június 1., Penc Tartalom GPS GLONASS Galileo 2 GPS Block IIR Block IIA Block IIF 3 A GPS pontossága GPS
FLEXIBILIS SZÁRNYÚ REPÜLŐGÉP AKTÍV FLATTER SZABÁLYOZÁSA 1 BEVEZETÉS
 Patartics Bálint, Péni Tamás, Vanek Bálint FLEXIBILIS SZÁRNYÚ REPÜLŐGÉP AKTÍV FLATTER SZABÁLYOZÁSA 1 Az aeroelasztikus flatter egy csillapítatlan lengés, amelyet a repülőgép strukturális dinamikája és
Patartics Bálint, Péni Tamás, Vanek Bálint FLEXIBILIS SZÁRNYÚ REPÜLŐGÉP AKTÍV FLATTER SZABÁLYOZÁSA 1 Az aeroelasztikus flatter egy csillapítatlan lengés, amelyet a repülőgép strukturális dinamikája és
NYÍREGYHÁZI FŐISKOLA Tantárgy: Szakmai angol I.
 NYÍREGYHÁZI FŐISKOLA Tantárgy: Szakmai angol I. Műszaki és Mezőgazdasági Kar 016/017. tanév 1. félév Közlekedéstudományi és Infotechnológiai Tanszék Közlekedésmérnök szak II. évf. Légiközlekedési-hajózó
NYÍREGYHÁZI FŐISKOLA Tantárgy: Szakmai angol I. Műszaki és Mezőgazdasági Kar 016/017. tanév 1. félév Közlekedéstudományi és Infotechnológiai Tanszék Közlekedésmérnök szak II. évf. Légiközlekedési-hajózó
Kismagasságú katonai folyosók
 1 Kismagasságú katonai folyosók 2 KIINDULÁSI ALAP A fent említett szabályzók alapján jelenleg földközeli- és kismagasságú repülések végrehajtása a G típusú légtérben 250 csomó (460 km/h) sebesség alatt
1 Kismagasságú katonai folyosók 2 KIINDULÁSI ALAP A fent említett szabályzók alapján jelenleg földközeli- és kismagasságú repülések végrehajtása a G típusú légtérben 250 csomó (460 km/h) sebesség alatt
Új technikák, technológiák az épületgépészetben Korszerű épületek az automatika oldaláról, EN
 Új technikák, technológiák az épületgépészetben Korszerű épületek az automatika oldaláról, EN 15232. Kapcsolat Zoltán Kántor Email: zoltan.kantor@siemens.com Phone: 30-9966500 vagy (1)-471-1369 Oldal2
Új technikák, technológiák az épületgépészetben Korszerű épületek az automatika oldaláról, EN 15232. Kapcsolat Zoltán Kántor Email: zoltan.kantor@siemens.com Phone: 30-9966500 vagy (1)-471-1369 Oldal2
Experiential Living Lab for the Internet Of Things. ELLIOT Experiential Living Labs for the Internet Of Things
 Experiential Living Lab for the Internet Of Things ELLIOT Experiential Living Labs for the Internet Of Things Jövő Internet Nemzeti Technológiai Platform Workshop 2012 június 7. 1 A projekt EU FP7 7. pályázati
Experiential Living Lab for the Internet Of Things ELLIOT Experiential Living Labs for the Internet Of Things Jövő Internet Nemzeti Technológiai Platform Workshop 2012 június 7. 1 A projekt EU FP7 7. pályázati
Hogyan lesz adatbányából aranybánya?
 Hogyan lesz adatbányából aranybánya? Szolgáltatások kapacitástervezése a Budapest Banknál Németh Balázs Budapest Bank Fehér Péter - Corvinno Visontai Balázs - KFKI Tartalom 1. Szolgáltatás életciklus 2.
Hogyan lesz adatbányából aranybánya? Szolgáltatások kapacitástervezése a Budapest Banknál Németh Balázs Budapest Bank Fehér Péter - Corvinno Visontai Balázs - KFKI Tartalom 1. Szolgáltatás életciklus 2.
Ember és robot együttműködése a gyártásban Ipar 4.0
 Helyszín: MTA Székház, Felolvasóterem Időpont: 2017. November 7. Ember és robot együttműködése a gyártásban Ipar 4.0 Dr. Erdős Ferenc Gábor MTA SZTAKI Fejlett robotika ígérete A fejlett robotika és az
Helyszín: MTA Székház, Felolvasóterem Időpont: 2017. November 7. Ember és robot együttműködése a gyártásban Ipar 4.0 Dr. Erdős Ferenc Gábor MTA SZTAKI Fejlett robotika ígérete A fejlett robotika és az
Autonóm járműrendszerek kutatása a zalaegerszegi autonóm tesztpályához kapcsolódóan. Pályázati témák (3) Téma rövid tartalma
 Téma rövid tartalma") Pályázati témák (3) 1 Mesterséges intelligencia alapú döntési modellek fejlesztése és tesztelése valós autonóm járműves környezetben Szimulációs környezetben kifejlesztett döntési modellek vizsgálata valós
Pályázati témák (3) 1 Mesterséges intelligencia alapú döntési modellek fejlesztése és tesztelése valós autonóm járműves környezetben Szimulációs környezetben kifejlesztett döntési modellek vizsgálata valós
(Teszt)automatizálás. Bevezető
automatizálás. Bevezető") (Teszt)automatizálás Bevezető Órák ( az előadások sorrendje változhat) 1. Bevezető bemutatkozás, követelmények, kérdések és válaszok 2. Előadás Unit test in general, 3. Előadás Unit test, Tools and practices,
(Teszt)automatizálás Bevezető Órák ( az előadások sorrendje változhat) 1. Bevezető bemutatkozás, követelmények, kérdések és válaszok 2. Előadás Unit test in general, 3. Előadás Unit test, Tools and practices,
EFOP DISZRUPTÍV TECHNOLÓGIÁK KUTATÁS-FEJLESZTÉSE AZ E-MOBILITY TERÜLETÉN ÉS INTEGRÁLÁSUK A MÉRNÖKKÉPZÉSBE
 SZTE Innovációs nap Szeged, 2017 május 30. EFOP-3.6.1-16-2016-00014 DISZRUPTÍV TECHNOLÓGIÁK KUTATÁS-FEJLESZTÉSE AZ E-MOBILITY TERÜLETÉN ÉS INTEGRÁLÁSUK A MÉRNÖKKÉPZÉSBE Dr. Weltsch Zoltán Pallasz Athéné
SZTE Innovációs nap Szeged, 2017 május 30. EFOP-3.6.1-16-2016-00014 DISZRUPTÍV TECHNOLÓGIÁK KUTATÁS-FEJLESZTÉSE AZ E-MOBILITY TERÜLETÉN ÉS INTEGRÁLÁSUK A MÉRNÖKKÉPZÉSBE Dr. Weltsch Zoltán Pallasz Athéné
ROBOTREPÜLŐGÉP A REPÜLŐMÉRNÖK KÉPZÉSBEN 2
 Dr. Gáti Balázs 1 ROBOTREPÜLŐGÉP A REPÜLŐMÉRNÖK KÉPZÉSBEN 2 Az elektronika rohamos fejlődésével sorra jelennek meg a civil célokra kifejlesztett robotrepülőgépek, melyek a vészhelyzet management, az energiaipar,
Dr. Gáti Balázs 1 ROBOTREPÜLŐGÉP A REPÜLŐMÉRNÖK KÉPZÉSBEN 2 Az elektronika rohamos fejlődésével sorra jelennek meg a civil célokra kifejlesztett robotrepülőgépek, melyek a vészhelyzet management, az energiaipar,
Intelligens Rendszerek
 Intelligens Rendszerek Robotok http://mobil.nik.uni-obuda.hu http://mobil.nik.uni-obuda.hu/tantargyak/irg/segedanyagok/ B Biology Biológiai mintára készített, E Electronics elektronikusan működtetett,
Intelligens Rendszerek Robotok http://mobil.nik.uni-obuda.hu http://mobil.nik.uni-obuda.hu/tantargyak/irg/segedanyagok/ B Biology Biológiai mintára készített, E Electronics elektronikusan működtetett,
ÉPÜLETEK TŰZVÉDELME A TERVEZÉSTŐL A BEAVATKOZÁSIG TUDOMÁNYOS KONFERENCIA A BIM és a tűzvédelem The BIM and the fire protection
 ÉPÜLETEK TŰZVÉDELME A TERVEZÉSTŐL A BEAVATKOZÁSIG TUDOMÁNYOS KONFERENCIA Budapest 2019. 04. 10. Nemzeti Közszolgálati Egyetem 1083 Budapest, Ludovika tér 2. Érces Gergő tű. őrnagy, egyetemi tanársegéd
ÉPÜLETEK TŰZVÉDELME A TERVEZÉSTŐL A BEAVATKOZÁSIG TUDOMÁNYOS KONFERENCIA Budapest 2019. 04. 10. Nemzeti Közszolgálati Egyetem 1083 Budapest, Ludovika tér 2. Érces Gergő tű. őrnagy, egyetemi tanársegéd
A katonai légijármű rendszermodellje A katonai légijármű lehet: A katonai légijármű bemenetei: a környezetből A katonai légijármű kimenetei:
 Seres György: A KATONAI LÉGIJÁRMŰ, MINT RENDSZER 2003-ban, a ROBOTHADVISELÉS 3 konferencián bemutattam a katonai rendszerek egy általános modelljét 1. Csak emlékeztetőül mutatom be az akkori előadás néhány
Seres György: A KATONAI LÉGIJÁRMŰ, MINT RENDSZER 2003-ban, a ROBOTHADVISELÉS 3 konferencián bemutattam a katonai rendszerek egy általános modelljét 1. Csak emlékeztetőül mutatom be az akkori előadás néhány
Drónok a tűzvédelemben
 Drónok a tűzvédelemben Innovációk a tűzoltásban és a műszaki mentésben Az OKF Tudományos Tanácsa és a Magyar Tűzvédelmi Szövetség konferenciája 2016. április 13. Tartalom A kezdetek, avagy egy kis innovációs
Drónok a tűzvédelemben Innovációk a tűzoltásban és a műszaki mentésben Az OKF Tudományos Tanácsa és a Magyar Tűzvédelmi Szövetség konferenciája 2016. április 13. Tartalom A kezdetek, avagy egy kis innovációs
Geopanama, a vízidrón
 Geopanama, a vízidrón Stenzel Sándor Geodézia Zrt. Borsod-Abaúj-Zemplén Megyei Kormányhivatal Földhivatala Földmérési Szakmai Nap Miskolc, 2014. November 05. mégis, mik azok a drónok? Elnevezés: Drone
Geopanama, a vízidrón Stenzel Sándor Geodézia Zrt. Borsod-Abaúj-Zemplén Megyei Kormányhivatal Földhivatala Földmérési Szakmai Nap Miskolc, 2014. November 05. mégis, mik azok a drónok? Elnevezés: Drone
Nem romboló régészeti módszerek a paletta
 Nem romboló régészeti módszerek a paletta Légirégészet Képelemzés Geodézia UAV GIS fotó3d Terepbejárás Próbaásatás Geofizikai mérés Régészeti célú légi felderítés Képelemzés Jelenségek bemérése gabonában
Nem romboló régészeti módszerek a paletta Légirégészet Képelemzés Geodézia UAV GIS fotó3d Terepbejárás Próbaásatás Geofizikai mérés Régészeti célú légi felderítés Képelemzés Jelenségek bemérése gabonában
A KATONAI LÉGIJÁRMŰ, MINT RENDSZER. Seres György 2005
 A KATONAI LÉGIJÁRMŰ, MINT RENDSZER Seres György 2005 A KATONAI LÉGIJÁRMŰ, MINT RENDSZER Seres György 2005 2003-ban ban,, a ROBOTHADVISELÉS 3 konferencián bemutattam a katonai rendszerek egy általános modelljét
A KATONAI LÉGIJÁRMŰ, MINT RENDSZER Seres György 2005 A KATONAI LÉGIJÁRMŰ, MINT RENDSZER Seres György 2005 2003-ban ban,, a ROBOTHADVISELÉS 3 konferencián bemutattam a katonai rendszerek egy általános modelljét
Bringing Robustness into 5.9 GHz ITS WAVE Systems
 Nicolai Czink Laura Bernadó, Roland Tresch, Alexander Paier, Thomas Zemen Bringing Robustness into 5.9 GHz ITS WAVE Systems FTW Forschungszentrum Telekommunikation Wien E-Mail: czink@ftw.at 2nd ETSI TC
Nicolai Czink Laura Bernadó, Roland Tresch, Alexander Paier, Thomas Zemen Bringing Robustness into 5.9 GHz ITS WAVE Systems FTW Forschungszentrum Telekommunikation Wien E-Mail: czink@ftw.at 2nd ETSI TC
Hőkamerás drónok alkalmazása az épületfelmérésben
 Official reseller Hőkamerás drónok alkalmazása az épületfelmérésben Weszelovits Gergő GLT Scan&Plan Kft. www.gltscan.hu www.gltdrone.com 3D felmérések drónnal és lézerszkennerrel Röviden a GLT Scan&Plan-ről
Official reseller Hőkamerás drónok alkalmazása az épületfelmérésben Weszelovits Gergő GLT Scan&Plan Kft. www.gltscan.hu www.gltdrone.com 3D felmérések drónnal és lézerszkennerrel Röviden a GLT Scan&Plan-ről
Az a személy akinek joga a légijármûvel kapcsolatos minden kérdés végsõ eldöntése a repülés idõtartama alatt: A parancsnok
 1. oldal 1. 2. 100413 212 00 00 00 Légijog Kivéve, ha egy légiforgalmi irányító egységtõl erre engedélyt kapott, VFR szerint mûködõ légijármû nem léphet be egy repülõtéri irányító körzetbe, illetve nem
1. oldal 1. 2. 100413 212 00 00 00 Légijog Kivéve, ha egy légiforgalmi irányító egységtõl erre engedélyt kapott, VFR szerint mûködõ légijármû nem léphet be egy repülõtéri irányító körzetbe, illetve nem
A "Risk-based" monitoring háttere és elméleti alapja
 MAGYAR KLINIKAI FARMAKOLOGUSOK, XV. TOVABBKÉPZŐ NAPOK Debrecen, 2013. december 12 14.. Dr. Szakolczai-Sándor Norbert A "Risk-based" monitoring háttere és elméleti alapja 2011 INC Research, LLC 1 Agenda
MAGYAR KLINIKAI FARMAKOLOGUSOK, XV. TOVABBKÉPZŐ NAPOK Debrecen, 2013. december 12 14.. Dr. Szakolczai-Sándor Norbert A "Risk-based" monitoring háttere és elméleti alapja 2011 INC Research, LLC 1 Agenda
A távérzékelés és fizikai alapjai 4. Technikai alapok
 A távérzékelés és fizikai alapjai 4. Technikai alapok Csornai Gábor László István Budapest Főváros Kormányhivatala Mezőgazdasági Távérzékelési és Helyszíni Ellenőrzési Osztály Az előadás 2011-es átdolgozott
A távérzékelés és fizikai alapjai 4. Technikai alapok Csornai Gábor László István Budapest Főváros Kormányhivatala Mezőgazdasági Távérzékelési és Helyszíni Ellenőrzési Osztály Az előadás 2011-es átdolgozott
BHE UAS rendszer bemutatása
 BHE UAS rendszer bemutatása Mikó Gyula Képfeldolgozás UAS technológiákhoz nyílt forráskódú és kis költségű szoftverekkel Földmérési és Távérzékelési Intézet 2013. május 14. BHE Bonn Hungary Elektronikai
BHE UAS rendszer bemutatása Mikó Gyula Képfeldolgozás UAS technológiákhoz nyílt forráskódú és kis költségű szoftverekkel Földmérési és Távérzékelési Intézet 2013. május 14. BHE Bonn Hungary Elektronikai
Kisgépes események vizsgálatai
 Kisgépes események vizsgálatai Mezei József Balesetvizsgáló gyakornok Kifogyott tüzelőanyag események 3 2 2 1 1 1 1 2012 2013 2014 2015 2016 2017 2018 2 Cessna 150 a kinyerhető tüzelőanyag mennyisége:
Kisgépes események vizsgálatai Mezei József Balesetvizsgáló gyakornok Kifogyott tüzelőanyag események 3 2 2 1 1 1 1 2012 2013 2014 2015 2016 2017 2018 2 Cessna 150 a kinyerhető tüzelőanyag mennyisége:
A fejlődés folytatódik
 ~ Szepessy Kornél vezérigazgató A fejlődés folytatódik Nemzeti Közlekedési Napok 2014. október 28. Elmúlt négy év eredményei ANS III projekt technikai-technológiai megújulás, MATIAS KFOR szektor megnyitása
~ Szepessy Kornél vezérigazgató A fejlődés folytatódik Nemzeti Közlekedési Napok 2014. október 28. Elmúlt négy év eredményei ANS III projekt technikai-technológiai megújulás, MATIAS KFOR szektor megnyitása
Hazai fejlesztésű hibahely behatárolási eljárás tapasztalatai
 Hazai fejlesztésű hibahely behatárolási eljárás tapasztalatai Védelmi és Irányítástechnikai Fórum, Siófok, 2015. 6. 3-4. Dr. Raisz Dávid, docens BME Villamos Energetika Tanszék Villamos Művek és Környezet
Hazai fejlesztésű hibahely behatárolási eljárás tapasztalatai Védelmi és Irányítástechnikai Fórum, Siófok, 2015. 6. 3-4. Dr. Raisz Dávid, docens BME Villamos Energetika Tanszék Villamos Művek és Környezet
KISMÉRETŰ PILÓTA NÉLKÜLI REPÜLŐK LÉGTÉRHASZNÁLATI KÉRDÉSEI
 Dr. Wührl Tibor 1 KISMÉRETŰ PILÓTA NÉLKÜLI REPÜLŐK LÉGTÉRHASZNÁLATI KÉRDÉSEI Előadásom célja, hogy áttekintést adjak a kisméretű UAV-k légtérhasználati lehetőségeivel kapcsolatos jelenlegi jogszabályi
Dr. Wührl Tibor 1 KISMÉRETŰ PILÓTA NÉLKÜLI REPÜLŐK LÉGTÉRHASZNÁLATI KÉRDÉSEI Előadásom célja, hogy áttekintést adjak a kisméretű UAV-k légtérhasználati lehetőségeivel kapcsolatos jelenlegi jogszabályi
Beszámoló szakképzési hozzájárulási támogatás felhasználásáról
 Beszámoló szakképzési hozzájárulási támogatás felhasználásáról Támogató: HungaroControl Magyar Légiforgalmi Szolgálat Zártkörűen Működő Részvénytársaság, 1185 Budapest, Igló u. 33-35. Támogatás összege:
Beszámoló szakképzési hozzájárulási támogatás felhasználásáról Támogató: HungaroControl Magyar Légiforgalmi Szolgálat Zártkörűen Működő Részvénytársaság, 1185 Budapest, Igló u. 33-35. Támogatás összege:
INTELLIGENCE ON YOUR SIDE WWW.INTELLIO.EU WWW.INTELLIO.EU WWW.INTELLIO.EU WWW.INTELLIO.EU WWW.INTELLIO.EU
 Intelligens videó megfigyelési megoldások Kópházi János ügyvezetı igazgató 2008.03.26 Napirend INTELLIGENCE ON YOUR SIDE Cégbemutató Intelligens videó rendszer Esettanulmányok Költséghatékonysági számítások
Intelligens videó megfigyelési megoldások Kópházi János ügyvezetı igazgató 2008.03.26 Napirend INTELLIGENCE ON YOUR SIDE Cégbemutató Intelligens videó rendszer Esettanulmányok Költséghatékonysági számítások
REPÜLÉS A XX.-XXI. SZÁZADBAN
 REPÜLÉS A XX.-XXI. SZÁZADBAN 2016 Icaros és Daedeus A Leonardo-álom Működtető erők Orsózó nyomaték az X-tengely körül Legyező nyomaték az Z-tengely körül Bólintó nyomaték az Y-tengely körül 1903. a kezdet.
REPÜLÉS A XX.-XXI. SZÁZADBAN 2016 Icaros és Daedeus A Leonardo-álom Működtető erők Orsózó nyomaték az X-tengely körül Legyező nyomaték az Z-tengely körül Bólintó nyomaték az Y-tengely körül 1903. a kezdet.
45. HÉT/ 1. foglalkozás 3 óra STABILITÁS
 1/6 45. HÉT/ 1. foglalkozás 3 óra 081 04 00 00 STABILITÁS 081 04 01 00 Egyensúlyi feltételek stabilizált vízszintes repülésben 081 04 01 01 A statikus stabilitás előfeltételei 081 04 01 02 A nyomatékok
1/6 45. HÉT/ 1. foglalkozás 3 óra 081 04 00 00 STABILITÁS 081 04 01 00 Egyensúlyi feltételek stabilizált vízszintes repülésben 081 04 01 01 A statikus stabilitás előfeltételei 081 04 01 02 A nyomatékok
MAGYAR REPÜLŐ SZÖVETSÉG BIZTONSÁGI SZERVEZET ZÁRÓJELENTÉS. 224/2003 sorszámú LÉGIKÖZLEKEDÉSI ESEMÉNY
 1 23/2003 MRSZ-BISZ eseményszám MAGYAR REPÜLŐ SZÖVETSÉG BIZTONSÁGI SZERVEZET ZÁRÓJELENTÉS 224/2003 sorszámú LÉGIKÖZLEKEDÉSI ESEMÉNY Dürmentingen (Németország) 2003.06.17. HA-4011: lajstromjelű L-Spatz-55:
1 23/2003 MRSZ-BISZ eseményszám MAGYAR REPÜLŐ SZÖVETSÉG BIZTONSÁGI SZERVEZET ZÁRÓJELENTÉS 224/2003 sorszámú LÉGIKÖZLEKEDÉSI ESEMÉNY Dürmentingen (Németország) 2003.06.17. HA-4011: lajstromjelű L-Spatz-55:
VÉDELMI ELEKTRONIKA, INFORMATIKA ÉS KOMMUNIKÁCIÓ TUDOMÁNYSZAK
 VÉDELMI ELEKTRONIKA, INFORMATIKA ÉS KOMMUNIKÁCIÓ TUDOMÁNYSZAK http://www.zmne.hu/kmdi/index.html TUDOMÁNYSZAKVEZETŐ Dr. Haig Zsolt mk. alezredes, egyetemi docens 29-343 haig.zsolt@zmne.hu http://www.zmne.hu/tanszekek/ehc/indul.htm
VÉDELMI ELEKTRONIKA, INFORMATIKA ÉS KOMMUNIKÁCIÓ TUDOMÁNYSZAK http://www.zmne.hu/kmdi/index.html TUDOMÁNYSZAKVEZETŐ Dr. Haig Zsolt mk. alezredes, egyetemi docens 29-343 haig.zsolt@zmne.hu http://www.zmne.hu/tanszekek/ehc/indul.htm
 BALI Tamás alezredes, Bázisparancsnok helyettes MH 86 Szolnok Helikopter Bázis bali.tamas@hm.gov.hu orcid.org/0000-0001-6098-8602 Dr. BÁNYAINÉ Dr. TÓTH Ágota, PhD egyetemi docens Miskolci Egyetem, Logisztikai
BALI Tamás alezredes, Bázisparancsnok helyettes MH 86 Szolnok Helikopter Bázis bali.tamas@hm.gov.hu orcid.org/0000-0001-6098-8602 Dr. BÁNYAINÉ Dr. TÓTH Ágota, PhD egyetemi docens Miskolci Egyetem, Logisztikai
AS-i illesztő-tápegység Pick-to Light rendszerekhez. Kábel keresztmetszet
 AS-I ILLESZTŐ-TÁPEGYSÉG PTL RENDSZEREKHEZ KVL-AGW01 FŐBB PARAMÉTEREK AS-i vezérlők illesztését végzi a KVL COMP által gyártott PTL rendszerekhez. 3 A terhelhetőségű AS-i tápegység. 5 A terhelhetőségű tápegység
AS-I ILLESZTŐ-TÁPEGYSÉG PTL RENDSZEREKHEZ KVL-AGW01 FŐBB PARAMÉTEREK AS-i vezérlők illesztését végzi a KVL COMP által gyártott PTL rendszerekhez. 3 A terhelhetőségű AS-i tápegység. 5 A terhelhetőségű tápegység
Különös biztosítási feltételek Pilóta nélküli légi járművek üzemben tartóinak felelősségbiztosítása
 Különös biztosítási feltételek Pilóta nélküli légi járművek üzemben tartóinak felelősségbiztosítása 1. Fogalom meghatározások 1.1. UAV (Unmanned Aerial Vehicle - pilóta nélküli légi jármű): minden olyan
Különös biztosítási feltételek Pilóta nélküli légi járművek üzemben tartóinak felelősségbiztosítása 1. Fogalom meghatározások 1.1. UAV (Unmanned Aerial Vehicle - pilóta nélküli légi jármű): minden olyan
A REPÜLÉSBEN ALKALMAZOTT RADARRENDSZEREK
 Géczi József Dr. Békési László A REPÜLÉSBEN ALKALMAZOTT RADARRENDSZEREK A radarberendezéseket a légi közlekedésben működési elvük, adásmódjuk és elhelyezésük szerint osztályozzuk. Működésük szerint elsődleges
Géczi József Dr. Békési László A REPÜLÉSBEN ALKALMAZOTT RADARRENDSZEREK A radarberendezéseket a légi közlekedésben működési elvük, adásmódjuk és elhelyezésük szerint osztályozzuk. Működésük szerint elsődleges
Autonóm jármű forgalomszimulátorba illesztése
 Autonóm jármű forgalomszimulátorba illesztése Szalai Mátyás 2018 Konzulens: Dr. Tettamanti Tamás A szimulációs feladat Miért hasznos? Biztonságos környezetben nyújt lehetőséget az autonóm járművek forgalmi
Autonóm jármű forgalomszimulátorba illesztése Szalai Mátyás 2018 Konzulens: Dr. Tettamanti Tamás A szimulációs feladat Miért hasznos? Biztonságos környezetben nyújt lehetőséget az autonóm járművek forgalmi
TestLine - nummulites_gnss Minta feladatsor
 1.* Egy műholdas helymeghatározás lehet egyszerre abszolút és kinematikus. 2.* műholdak pillanatnyi helyzetéből és a megmért távolságokból számítható a vevő pozíciója. 3.* 0:55 Nehéz kinai BEIDOU, az amerikai
1.* Egy műholdas helymeghatározás lehet egyszerre abszolút és kinematikus. 2.* műholdak pillanatnyi helyzetéből és a megmért távolságokból számítható a vevő pozíciója. 3.* 0:55 Nehéz kinai BEIDOU, az amerikai
record your global partner for entrance solutions ajtónyitó automatikák DFA 127 your global partner for entrance solutions
 record your global partner for entrance solutions record DFA 127 ajtónyitó automatikák your global partner for entrance solutions DFA 127 your global partner for entrance solutions DFA 127 2 record DFA
record your global partner for entrance solutions record DFA 127 ajtónyitó automatikák your global partner for entrance solutions DFA 127 your global partner for entrance solutions DFA 127 2 record DFA
A rendszer legfontosabb jellemzőit az alábbiakban foglalhatjuk össze:
 GPS nyomkövető készülék, illetve navigációs rendszerek A GPS a Global Positioning System angol rövidítése és globális helymeghatározó rendszert jelent. Egy rendszer, amely 24 műholdból áll, melyet az USA
GPS nyomkövető készülék, illetve navigációs rendszerek A GPS a Global Positioning System angol rövidítése és globális helymeghatározó rendszert jelent. Egy rendszer, amely 24 műholdból áll, melyet az USA
Mozgó jármű helyzetének és tájolásának meghatározása alacsony árú GNSS és inerciális érzékelők szoros csatolású integrációjával
 Mozgó jármű helyzetének és tájolásának meghatározása alacsony árú GNSS és inerciális érzékelők szoros csatolású integrációjával Farkas Márton Rédey István Geodéziai Szeminárium 2019. április 2. Áttekintés
Mozgó jármű helyzetének és tájolásának meghatározása alacsony árú GNSS és inerciális érzékelők szoros csatolású integrációjával Farkas Márton Rédey István Geodéziai Szeminárium 2019. április 2. Áttekintés
A REPÜLŐ SZAKEMBEREK SZAKISMERETEI ÉS KÉPESSÉGEI IRÁNTI IGÉNY A TECHNIKAI FEJLŐDÉS TÜKRÉBEN BEVEZETÉS
 A REPÜLŐ SZAKEMBEREK SZAKISMERETEI ÉS KÉPESSÉGEI IRÁNTI IGÉNY A TECHNIKAI FEJLŐDÉS TÜKRÉBEN Dr. Peták György Egyetemi docens Zrinyi Miklós Nemzetvédelmi Egyetem Vezetés- és Szervezéstudományi Kar Repülő
A REPÜLŐ SZAKEMBEREK SZAKISMERETEI ÉS KÉPESSÉGEI IRÁNTI IGÉNY A TECHNIKAI FEJLŐDÉS TÜKRÉBEN Dr. Peták György Egyetemi docens Zrinyi Miklós Nemzetvédelmi Egyetem Vezetés- és Szervezéstudományi Kar Repülő
REPÜLŐGÉP MOZGÁSÁNAK SZABÁLYOZÁSA, VALÓS ÉS KOMPLEX BIZONYTALANSÁGOK FIGYELEMBE VÉTELÉVEL BEVEZETÉS
 Bauer Péter REPÜLŐGÉP MOZGÁSÁNAK SZABÁLYOZÁSA, VALÓS ÉS KOMPLEX BIZONYTALANSÁGOK FIGYELEMBE VÉTELÉVEL BEVEZETÉS Napjainkban a megtervezett újabb és újabb repülőgép típusok, egyre szokatlanabb és ezért
Bauer Péter REPÜLŐGÉP MOZGÁSÁNAK SZABÁLYOZÁSA, VALÓS ÉS KOMPLEX BIZONYTALANSÁGOK FIGYELEMBE VÉTELÉVEL BEVEZETÉS Napjainkban a megtervezett újabb és újabb repülőgép típusok, egyre szokatlanabb és ezért


 Szélessávú Hírközlés és Villamosságtan Tanszék Űrkutató Csoport Szabó József A fedélzeti energiaellátás kérdései: architektúrák, energiaegyensúly. Űrtechnológia Budapest, 2014. március 19. Űrtechnológia
Szélessávú Hírközlés és Villamosságtan Tanszék Űrkutató Csoport Szabó József A fedélzeti energiaellátás kérdései: architektúrák, energiaegyensúly. Űrtechnológia Budapest, 2014. március 19. Űrtechnológia
A nemzeti fejlesztési miniszter /2012. (...) NFM rendelete a légijárművek gyártásáról, építéséről és műszaki alkalmasságáról
 NFM rendelete a légijárművek gyártásáról, építéséről és műszaki alkalmasságáról") A nemzeti fejlesztési miniszter /2012. (...) NFM rendelete a légijárművek gyártásáról, építéséről és műszaki alkalmasságáról A légiközlekedésről szóló 1995. évi XCVII. törvény 74. (2) bekezdésének d),
A nemzeti fejlesztési miniszter /2012. (...) NFM rendelete a légijárművek gyártásáról, építéséről és műszaki alkalmasságáról A légiközlekedésről szóló 1995. évi XCVII. törvény 74. (2) bekezdésének d),
Elektrotechnika - Bemutatkozás
 Elektrotechnika - Bemutatkozás Előadások a VIK Villamosmérnöki szak alapképzéses hallgatói számára Dr Vajda István egyetemi tanár Budapest Műszaki és Gazdaságtudományi Egyetem Villamos Energetika Tanszék
Elektrotechnika - Bemutatkozás Előadások a VIK Villamosmérnöki szak alapképzéses hallgatói számára Dr Vajda István egyetemi tanár Budapest Műszaki és Gazdaságtudományi Egyetem Villamos Energetika Tanszék
Quadkopter szimulációja LabVIEW környezetben Simulation of a Quadcopter with LabVIEW
 Quadkopter szimulációja LabVIEW környezetben Simulation of a Quadcopter with LabVIEW T. KISS 1 P. T. SZEMES 2 1University of Debrecen, kiss.tamas93@gmail.com 2University of Debrecen, szemespeter@eng.unideb.hu
Quadkopter szimulációja LabVIEW környezetben Simulation of a Quadcopter with LabVIEW T. KISS 1 P. T. SZEMES 2 1University of Debrecen, kiss.tamas93@gmail.com 2University of Debrecen, szemespeter@eng.unideb.hu
HU ISSN 1787-5072 www.anyagvizsgaloklapja.hu 62
 Kockázatalapú karbantartás Új törekvések* Fótos Réka** Kulcsszavak: kockázatalapú karbantartás és felülvizsgálat, kockázatkezelés, kockázati mátrix, API RBI szabványok Keywords: risk-based inspection and
Kockázatalapú karbantartás Új törekvések* Fótos Réka** Kulcsszavak: kockázatalapú karbantartás és felülvizsgálat, kockázatkezelés, kockázati mátrix, API RBI szabványok Keywords: risk-based inspection and
Pacemaker készülékek szoftverének verifikációja. Hesz Gábor
 Pacemaker készülékek szoftverének verifikációja Hesz Gábor A szív felépítése http://hu.wikipedia.org/w/index.php?title=fájl:diagram_of_the_human_heart_hu.svg http://en.wikipedia.org/wiki/file:conductionsystemoftheheartwithouttheheart.png
Pacemaker készülékek szoftverének verifikációja Hesz Gábor A szív felépítése http://hu.wikipedia.org/w/index.php?title=fájl:diagram_of_the_human_heart_hu.svg http://en.wikipedia.org/wiki/file:conductionsystemoftheheartwithouttheheart.png
1 csűrő 1 csűrő 2 magassági 2 magassági 3 gáz 3 gáz 4 oldalkormány 4 oldalkormány 5 Robot üzemmód 5 csűrő
 RC csatlakozók A csatlakozók kiosztása. Figyelem, a Gnd (föld, fekete) tüskéi felül vannak! RC input RC output 1 2 3 4 5 1 2 3 4 5 SP Gnd 5V Signal A robot 5 tel (RC input) és 5 tel (RC output) rendelkezik.
RC csatlakozók A csatlakozók kiosztása. Figyelem, a Gnd (föld, fekete) tüskéi felül vannak! RC input RC output 1 2 3 4 5 1 2 3 4 5 SP Gnd 5V Signal A robot 5 tel (RC input) és 5 tel (RC output) rendelkezik.
Click to edit Master title style
 Click to edit Master title style IoT megoldások LoRa technológiával Bottyán Balázs Flashnet Hungary Integrált Click to megoldások edit Master title style InteliLIGHT Teljes közvilágítási menedzsment megoldás
Click to edit Master title style IoT megoldások LoRa technológiával Bottyán Balázs Flashnet Hungary Integrált Click to megoldások edit Master title style InteliLIGHT Teljes közvilágítási menedzsment megoldás
Üzemelési Kézikönyv Operation Manual
 Magyar Vitorlázórepülő Szövetség ATO Üzemelési Kézikönyv Operation Manual C rész Part C ÚTVONAL Route 1. kiadás, revízió 0 2017.11.01 OM C rész Útvonal MVSz ATO Szándékosan üresen hagyva! 2 / 13 1. kiadás,
Magyar Vitorlázórepülő Szövetség ATO Üzemelési Kézikönyv Operation Manual C rész Part C ÚTVONAL Route 1. kiadás, revízió 0 2017.11.01 OM C rész Útvonal MVSz ATO Szándékosan üresen hagyva! 2 / 13 1. kiadás,
AZ ARTHUR (ARTILLERY HUNTING RADAR) TÜZÉRSÉGI RÖPPÁLYA FELDERÍTŐ RADAR LEGÚJABB VÁLTOZATA
 TÜZÉRSÉGI RÖPPÁLYA FELDERÍTŐ RADAR LEGÚJABB VÁLTOZATA") BARD FROSTAD őrnagy 1 THOR PALMGREN 2 AZ ARTHUR (ARTILLERY HUNTING RADAR) TÜZÉRSÉGI RÖPPÁLYA FELDERÍTŐ RADAR LEGÚJABB VÁLTOZATA KONFLIKTUSOS TERÜLETEKEN, BEVETÉS KÖZBEN SZERZETT TAPASZTALATOK Az első sorozatban
BARD FROSTAD őrnagy 1 THOR PALMGREN 2 AZ ARTHUR (ARTILLERY HUNTING RADAR) TÜZÉRSÉGI RÖPPÁLYA FELDERÍTŐ RADAR LEGÚJABB VÁLTOZATA KONFLIKTUSOS TERÜLETEKEN, BEVETÉS KÖZBEN SZERZETT TAPASZTALATOK Az első sorozatban
PHANTOM 3. Gyors üzembehelyezés STANDARD V1.0
 PHANTOM 3 STANDARD Gyors üzembehelyezés V1.0 Phantom 3 Standard Ismerd meg a Phantomot! Phantom 3 Standard 2.7K Ultra HD videó és 12MP fotó készítésére alkalmas kameráva. l. Áttekintő ábra 7 8 6 5 9 4
PHANTOM 3 STANDARD Gyors üzembehelyezés V1.0 Phantom 3 Standard Ismerd meg a Phantomot! Phantom 3 Standard 2.7K Ultra HD videó és 12MP fotó készítésére alkalmas kameráva. l. Áttekintő ábra 7 8 6 5 9 4
Effects and opportunities of supplying electric vehicles by public charging stations
 Effects and opportunities of supplying electric vehicles by public charging stations MEE Diplomaterv pályázat II. helyezett - 2012 Vereczki György BME Villamos Energetika Tanszék Konzulensek: Prikler László
Effects and opportunities of supplying electric vehicles by public charging stations MEE Diplomaterv pályázat II. helyezett - 2012 Vereczki György BME Villamos Energetika Tanszék Konzulensek: Prikler László
KOGGM614 JÁRMŰIPARI KUTATÁS ÉS FEJLESZTÉS FOLYAMATA
 KOGGM614 JÁRMŰIPARI KUTATÁS ÉS FEJLESZTÉS FOLYAMATA System Design Wahl István 2019.03.26. BME FACULTY OF TRANSPORTATION ENGINEERING AND VEHICLE ENGINEERING Tartalomjegyzék Rövidítések A rendszer definiálása
KOGGM614 JÁRMŰIPARI KUTATÁS ÉS FEJLESZTÉS FOLYAMATA System Design Wahl István 2019.03.26. BME FACULTY OF TRANSPORTATION ENGINEERING AND VEHICLE ENGINEERING Tartalomjegyzék Rövidítések A rendszer definiálása
Oracle Enterprise Manager: Az első teljesértékű felhő üzemeltetési megoldás
 2011 November 8. New York Palota Hotel Boscolo Budapest Oracle Enterprise Manager: Az első teljesértékű felhő üzemeltetési megoldás Sárecz Lajos, Vezető tanácsadó Oracle Hungary Átfogó felhő üzemeltetés
2011 November 8. New York Palota Hotel Boscolo Budapest Oracle Enterprise Manager: Az első teljesértékű felhő üzemeltetési megoldás Sárecz Lajos, Vezető tanácsadó Oracle Hungary Átfogó felhő üzemeltetés
1002D STRUKTÚRÁJÚ, KRITIKUS ÜZEMBIZTONSÁGÚ RENDSZER (SCS 1 ) ELEMZÉSE DISZKRÉT-DISZKRÉT MARKOV MODELLEL
 ELEMZÉSE DISZKRÉT-DISZKRÉT MARKOV MODELLEL") Dr. Forgon Miklós mk. ezredes ZMNE olyai János Katonai Műszaki Kar Katonai Elektronikai Tanszék forgon.miklos@zmne.hu Neszveda József főiskolai docens, irányítástechnikai szakmérnök MF Kandó Villamosmérnöki
Dr. Forgon Miklós mk. ezredes ZMNE olyai János Katonai Műszaki Kar Katonai Elektronikai Tanszék forgon.miklos@zmne.hu Neszveda József főiskolai docens, irányítástechnikai szakmérnök MF Kandó Villamosmérnöki
IX. TAVASZI MÉRNÖKNAP, NÓGRÁD
 IX. TAVASZI MÉRNÖKNAP, NÓGRÁD - 2017 UAV UAS a legújabb adatgyűjtési technológia DRON Bartha Csaba Multikopterek vs. Merevszárnyú repülőgépek Rövid üzemidő, tipikusan kevesebb mint 20 perc (sok motor)
IX. TAVASZI MÉRNÖKNAP, NÓGRÁD - 2017 UAV UAS a legújabb adatgyűjtési technológia DRON Bartha Csaba Multikopterek vs. Merevszárnyú repülőgépek Rövid üzemidő, tipikusan kevesebb mint 20 perc (sok motor)
Intelligens közlekedési rendszer alkalmazásokkal a közlekedésbiztonság javításáért
 Új évtized, új kihívások a közlekedésbiztonságban közúti közlekedésbiztonsági konferencia Intelligens közlekedési rendszer alkalmazásokkal a közlekedésbiztonság javításáért Szűcs Lajos elnök ITS Hungary
Új évtized, új kihívások a közlekedésbiztonságban közúti közlekedésbiztonsági konferencia Intelligens közlekedési rendszer alkalmazásokkal a közlekedésbiztonság javításáért Szűcs Lajos elnök ITS Hungary
Adatközpontok felügyelete
 Adatközpontok felügyelete A PlateSpin termékcsalád Hargitai Zsolt Sales Support Manager zsolt.hargitai@novell.hu Szolgáltatás-orientált adatközpont 2 Adatközpontok felügyelete 3 Miről lesz szó? 1 Fizikai
Adatközpontok felügyelete A PlateSpin termékcsalád Hargitai Zsolt Sales Support Manager zsolt.hargitai@novell.hu Szolgáltatás-orientált adatközpont 2 Adatközpontok felügyelete 3 Miről lesz szó? 1 Fizikai
Légi lézerszkennelt adatok előállítása és feldolgozása
 Légi lézerszkennelt adatok előállítása és feldolgozása Enyedi Péter kutatási koordinátor Károly Róbert Főiskola Távérzékelési és Vidékfejlesztési Kutatóintézet Fény-Tér-Kép Konferencia Gyöngyös, Károly
Légi lézerszkennelt adatok előállítása és feldolgozása Enyedi Péter kutatási koordinátor Károly Róbert Főiskola Távérzékelési és Vidékfejlesztési Kutatóintézet Fény-Tér-Kép Konferencia Gyöngyös, Károly
Approval Status. /master/all-cars/volvoxc60/details/pages/accessories.aspx. /master/all-cars/volvoc30/details/pages/accessories.
 Page 1 of 8 hu All Sites Advanced Search Volvo Cars > hu > Dynamic Banners Dynamic Banners New Actions View: All Items Title Text Image Link Approval Status the C30 Fedezd fel a C30-at. Rád vár stílusával.
Page 1 of 8 hu All Sites Advanced Search Volvo Cars > hu > Dynamic Banners Dynamic Banners New Actions View: All Items Title Text Image Link Approval Status the C30 Fedezd fel a C30-at. Rád vár stílusával.