SZÁRAZFÖLDI ROBOTTECHNIKAI ESZKÖZÖK TERVEZÉSÉNEK ÉS ALKALMAZÁSÁNAK BIZTONSÁGI SZEMPONTJAI. Koleszár Béla
|
|
|
- Ákos Barna
- 9 évvel ezelőtt
- Látták:
Átírás
1 SZÁRAZFÖLDI ROBOTTECHNIKAI ESZKÖZÖK TERVEZÉSÉNEK ÉS ALKALMAZÁSÁNAK BIZTONSÁGI SZEMPONTJAI Koleszár Béla

2 Tartalom Bevezetés Biztonsági szempontok Szárazföldi robottechnikai eszközök alkalmazásának a reális lehetőségei Automotív fejlesztések áttekintése Összegzés, következtetések

3 Bevezetés A Zrínyi Miklós Nemzetvédelmi Egyetem Katonai Műszaki Doktori Iskola doktoranduszaként kidolgozandó témám a "Földi robottechnikai eszközök konstrukciós és alkalmazási kérdései, különös tekintettel a békefenntartó missziók biztonságának növelésére." Az emberek nehéz, monoton, veszélyes munkáját átvevő autonóm robotok: Ipari robotok, robotpilóták, robotrepülőgépek, takarító-, mosó-, medencetisztító robotgépek, robot-fűnyírók, logisztikai feladatokat ellátó kisebb robotok, földalattik, stb. A távolabbi cél, a robotjárművek közúti forgalomban való engedélyeztetése. Felmerülő jogi problémák. A robotok vagy a légtérben, vagy emberek elől zárt területen mozognak, vagy kicsi a károkozó képességük.

4 Crusher
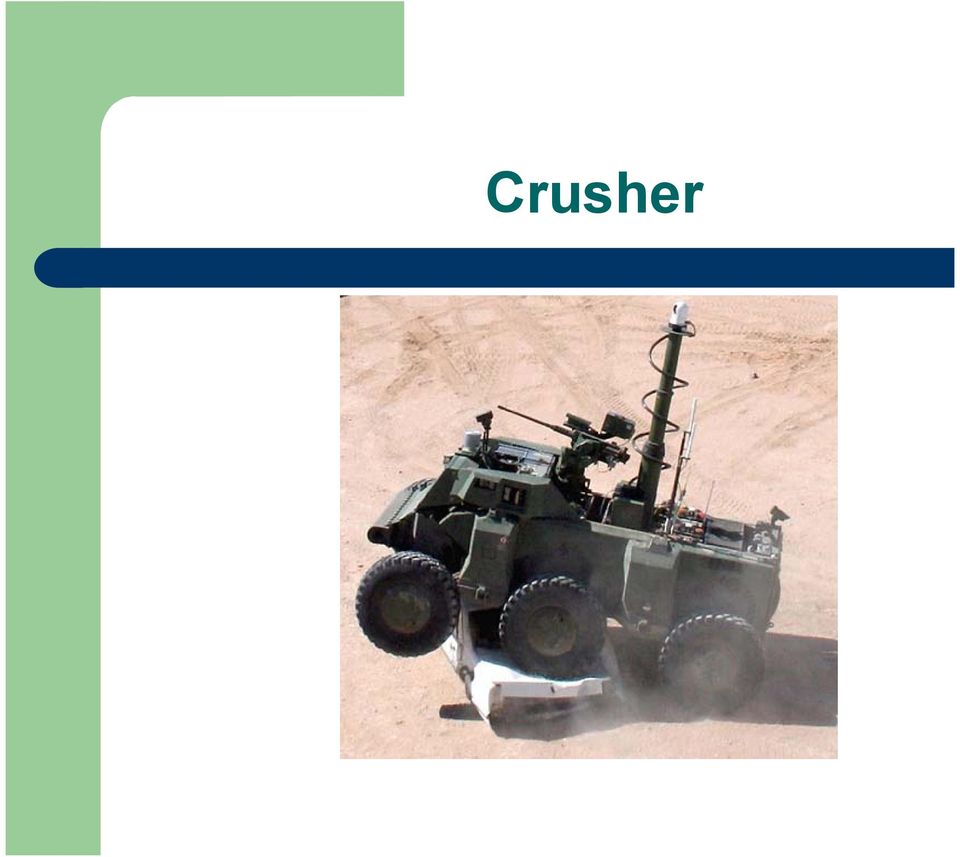
5 Katonai felhasználások A katonai célokra való felhasználás katalizátorként szolgál. Katonai szárazföldi robotok ma Aknakereső- Aknamentesítő- Felderítő- (főleg házakban, pincékben, barlangokban) Csapásmérő- (fegyverekkel illetve robbanótöltettel felszerelve
 Csapásmérő-")
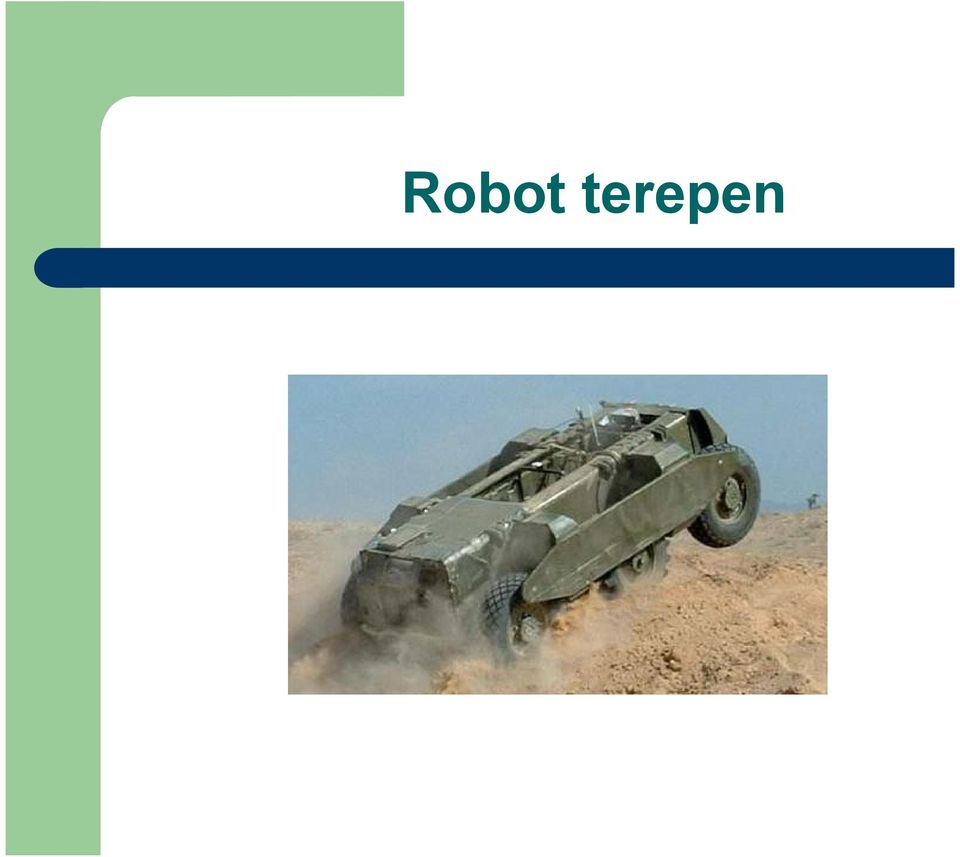
6 További témák Az eddigi szárazföldi robotok aránylag lassúk, csak részben működnek önállóan. Az összeköttetés bármilyen okból történő megszakadása után a távirányított jármű is átmeneti időre autonóm járműként kénytelen működni! Biztonsági rés - eddig nem nagyon kutatott. Az autóiparban komoly fejlesztések történnek az intelligens járművek irányába. Elemzem őket az esetleges katonai felhasználásuk céljából. Informatikai részegységeik- megkülönböztetett figyelem szükséges. Eddig inkább csak információs jelleg Az autonóm járműveknél a hibás információk hibás döntésekhez vezethetnek, ezek pedig balesetet, sérüléseket, károkat okozhatnak, veszélyeztetve a bevetés sikerét.

7 Robot terepen
8 Biztonsági szempontok Járművek általános biztonsága Biztonság a földi robotjárműveknél Biztonság oszlopmenetben, illetve csapatban Ellenség - barát? Etikai problémák Veszélyforrások

9 Járművek általános biztonsága Közúti közlekedés biztonsága Harcjárművekkel szemben támasztott általános követelmények A járművezetők munkáját segítő berendezések

10 Közúti közlekedés biztonsága Szigorú előírások, műszaki vizsgák Megkettőzött fék-, ill. kormányrendszer Fékezési, kormányzási erők Világítás, jelzőlámpák, ablaktörlők Biztonsági előírások a tolatásnál Aláfutás elleni védelem, gyalogosvédelem Stb.

11 Harcjárművekkel szemben támasztott általános követelmények Ballisztikai védelem Improvizált robbanóeszközök (IED) elleni védelem Mobilitás Terepjáró képesség Sebesség Kétéltűség Ergonómiai követelmények Stb. Steyr Pandur Rafael lövegtorony

12 A járművezetők munkáját segítő berendezések Elektronikusan vezérelt motorok Automata sebességváltók Automatikusan működő hossz- és keresztdifferenciálzárak Például a Steyr cég által kifejlesztett ADM rendszer: Automatic Drive-train Management-System Periszkópok helyett kamerák

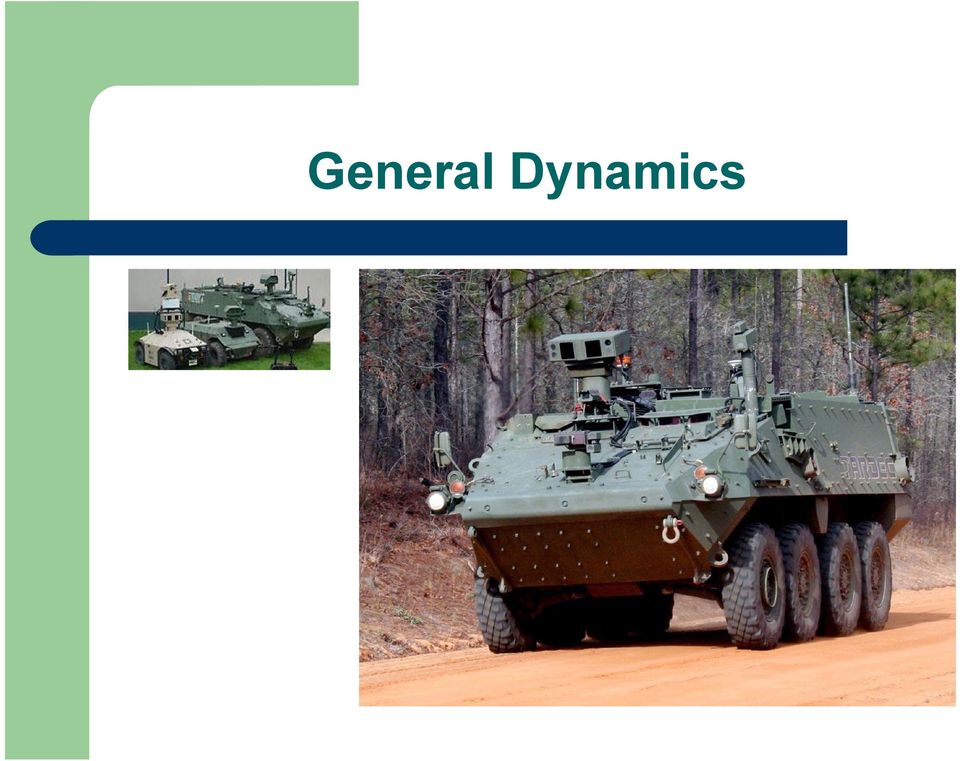
13 Biztonság a földi robotjárműveknél Zavarmentes, kódolt adatátvitel (lehetőleg több úton) A megfigyelőrendszereket (kamera, radar, lidar, stb.) meg kell többszörözni Összeköttetés megszakadása => autonóm jármű! Cselekvési sor: Kis sebességnél ez jelentheti az azonnali fékezést is Nagy sebességnél, kanyarban, csúszós úton, megrakottan, meredek lejtőn ennek súlyos következményei lehetnek magára a járműre, annak rakományára, a közlekedés más résztvevőire, az út melletti épületekre, a járókelőkre nézve A robotjármű vezérlőrendszerének abban a pillanatban át kell váltania autonóm üzemmódba A követő járművek figyelmét fel kell hívnia a vészhelyzetre: vészjel küldésével, vész-villogók bekapcsolásával, stb. Ez a reális időben működő önálló számítógépes rendszer arra is szolgál, hogy visszajelzést ad az operátornak arra, hogy még biztonságos-e egy vészleállás. A biztonsági kérdések tisztázása a katonai, ill. civil forgalomban való engedélyeztetés elengedhetetlen feltétele. Jogi problémák (pl. balesetnél a felelősség kérdése).

14 General Dynamics
15 További biztonsági tényezők Védelem az ellenség elektronikai zavarása ellen. A járművek, távirányított fegyverek feletti uralom. Az ellenség kezébe került robotok. Robot- operátorok átállása. A renitensen működő robotok kiiktatásának lehetősége. A járművek közötti kommunikáció kiemelten problémás kérdés Szélessávú zavaróadók az út menti rádió-távvezérlésű bombák elleni védekezés eszközeként. A saját robotokba vetett bizalom elvesztése fékezné a robotok további bevetését. Exocet rakéták a Falklandi háború alatt, illetve a Perzsa öbölben. Kíváncsi gyermekek távoltartása, humánus, non lethal eszközökkel. Pszichikai szempontból egy békefenntartó hadműveletnél bekövetkezett baleset romba dönthet minden addigi sikert.

16 Biztonság növelése oszlopmenetben, illetve csapatban Oszlopmenetnél az első jármű nyomvonalát és más paramétereit kopírozhatják a többiek. Üzemmód, ahol egy operátor több autonóm járművet felügyel. A járművek a durván kijelölt útvonal mentén önállóan haladnak Ha valamilyen probléma adódik, akkor a robotjármű leáll és az operátor segítségét kéri. Csapatban haladó robotok Az egyes járművek megfigyelőrendszereinek hálózatba (mátrixba) kapcsolása Az egyik robot által észlelt veszély az egész raj számára ismertté válik. Az egy járművön, különböző célokból szerelt szenzorok működésének összehangolása pl. az aktív rakétaelhárító rendszerek érzékelőit a jármű előtti tér ellenőrzésére is lehetne használni A járművek egymást zavaró hatása: Az aktív módban működő, pásztázó sugarak visszaverődött jeleit érzékelő szenzorok telítődhetnek.

17 Ellenség - barát? Nem, nem az ellenség, ön fia vágta sebét (Kisfaludy Károly: Mohács; 1824) Nagyon lesújtó, ha egy balesetet, sérülést, veszteséget a saját erők okozzák. A mobilis mátrixban a robotjárművek kölcsönösen elemzik egymás helyzetét, ha egy bizonyos (sebességtől, útviszonyoktól függő) határon belül közel kerülnek egymáshoz, akkor lassítaniuk kell, illetve meg kell állniuk. A helyzetelemzés fontossága miatt is szerepe lehet az egyes földi-légi rendszerek hálózatba kapcsolásának, hogy a kieső műholdas helymeghatározó rendszereket, ha némileg pontatlanabbul is, de helyettesíteni tudják. A robotjárművek mátrixát ki kell bővíteni az összes többi, a környéken mozgó, emberek által vezetett járművek adataival is. Katonák észlelhetősége. A zöld zónákban aktív módban A frontvonalon át lehet kapcsolni passzív módba A fejlesztés alatt álló személyi ellenség-barát felismerő rendszereket kis módosításokkal erre a funkcióra is alkalmassá lehet tenni.

18 Etikai problémák Az esetleges balesetek kiértékelése, a felelősség egyértelmű megállapítása nagyon nehéz. A robotoknál történő mindenfajta fegyverhasználat kérdéses, de főleg az autonóm (operátor felügyelete nélküli) csapások létjogosultsága hadijogilag még nem alátámasztott. Az ellenség barát felismerő rendszerek mellett esetleg megjelenhetnek ember robot / élőlény - gép felismerő rendszerek is? A teljes, illetve a részleges önmegsemmisítés lehetősége is felvet részben biztonsági, részben etikai problémákat is.

19 Veszélyforrások Sebesség fokozása => ~leszálló repülőgép Nem rendelkezik egy / kijelölt / körbekerített / lezárt / egyenes / jó felületű pályával A földi robotok pályája egyenetlen, rosszul, vagy egyáltalán nem kijelölt, nyitott még a szembe- és keresztforgalomnak is! Az utakról letérve számtalan terepakadály, házak, árkok, gödrök, folyók, fák, bokrok, kövek, veszélyes lejtők, víz, sár, mocsár, homok, hó-jég, köd, stb. leselkednek rá.

20 További veszélyek Ha rendelkezünk is elegendő szenzorral, akkor is a végtelen felé konvergáló kombinációs lehetőségek kiértékelése miatt a valós idejű feldolgozás akadozhat. Hosszú évek szükségesek, míg a tanuló programok és maguk a programozók a különböző tereptípusokra szabott szoftvereket optimalizálják, majd a legkülönbözőbb terepeken letesztelik. Nehéz terepen állandóan változó (pozitív és negatív) gyorsulások, ütések, rezgések Külső mechanikai behatások (pl. ágak, szögesdrót) Szennyeződések lehetősége (eső, hó, dér, por, sár, stb.)

21 Szárazföldi robottechnikai eszközök biztonságos alkalmazásának a reális lehetőségei Nehéz terepen, reális harci körülmények között, teljesen autonóm üzemmódban még nem vethetők be, vagy csak nagyon korlátozottan. Az autonomitás fokának a növekedése A közlekedési szabályok és szokások ismerete, a szituációk érzékelése, értékelése DARPA- Urban Challenge Közúti forgalmi körülmények Valós méretű járművek
22 Oskhosh
23 Vonatközlekedés robotizálása A sínek által adott fix nyomvonal Nincsenek szűk kanyarok, meredek lejtők Keresztforgalomnál elsőbbség Lakott területen elkerített pálya A lakosság tart tőle A hosszú fékút tolerált A villanymozdonyok, váltók, sorompók jól távvezérelhetők
24 Automotív fejlesztések áttekintése A járművezető túl-, illetve alulterheltsége miatti veszélyforrások csökkentése Egyéb segítő rendszerek
25 A járművezető / operátor túlterheltsége miatti veszélyforrások csökkentése Nagy forgalom, rossz látási és útviszonyok, rakomány, úthibák, akadályok, fáradtság, saját és ellenséges harci cselekmények, kieső funkciók, kiszámíthatatlan lakosság, stressz. Tolatási kamerák, parkoló szenzorok már mindennaposak, ezek hatékonyan csökkenthetik a kis sebességű balesetek számát Esőszenzorok, fejlesztések történnek az automatikusan történő fényszóró- tompításra is Előzésnél a holt szöget radar figyeli, ha járművet észlel, figyelmeztet Kanyarodásnál, letérésnél a gyalogosokat, kerékpárosokat is észlelheti A rossz látási viszonyoknál éjjellátó berendezések, radarok számítógéppel feldolgozott, kiértékelt adatai alapján létrehozható a sofőr látóterében egy leegyszerűsített színes, virtuális kép, amely figyelmezteti a veszélyre Az autonóm robotoknál a környezetről, a valós forgalomról csak ez, a képfeldolgozó programok segítségével előállított virtuális kép áll a döntéshozó vezérlőegységek rendelkezésére. A virtuális kép valósághűsége, részletessége, további feldolgozhatósága döntő hatással van az autonóm robotközlekedés biztonságára. Távlatilag a hálózatba kötött fedélzeti információs rendszer megkapja majd a közlekedési lámpák, illetve a már ismert akadályok adatait. Az egyre több, hálózatban autózó jármű egymás információit, vészjeleit (pl. baleset, álló kocsisor) is megkaphatják, illetve továbbadhatják a még árnyékban közlekedő további járműveknek (Car2X rendszer).
26 A járművezető / operátor alulterheltsége miatti veszélyforrások csökkentése Oszlopmenetben a járművezetők nincsenek irigylésre méltó helyzetben. Egyszer sötétben, rossz úton, órákon keresztül kell koncentrálniuk az előttük haladó jármű erősen tompított hátsó fényeire, majd nappal, jó időben, jó úton, aránylag lassú konvoj- sebességgel követni az előttük haladót. Megelőzni nem lehet, lemaradni sem lehet. Persze, hogy hamar elkalandozik a tekintet, lanyhul a figyelem Itt is segíthetnek a járműiparban kifejlesztett, tesztelt különböző biztonsági rendszerek: Az automatikus távolságtartás, automatikus fékezéses, vészfékezés a ráfutásos balesetek számát csökkentheti, illetve a zárt katonai menetoszlopoknál a biztonságos haladási sebességet növelheti. Az elektromechanikus kormányzás lehetővé teszi az automatikus sávtartást. A sávból való letéréskor hangjelzéssel, gyenge ellenkormányzással, vibrálással adhat figyelmeztető visszajelzést a jármű vezetőjének. A következő lépés az automatikus, gombnyomásra történő sávváltás lesz. A sofőrök figyelmét vigyázó, ellenőrző, tesztelő rendszerek fejlesztésének az eredményeit a robotjárművek operátorainál is alkalmazni lehet majd.
27 Robotkonvojok
28 Egyéb segítő rendszerek Önálló parkolórendszerek
29 Összegzés, következtetések A légjárműveknél már ma megfigyelhető trendhez hasonlatosan számíthatunk arra, hogy az újonnan fejlesztett szárazföldi járművek egyre nagyobb részét robotjárművek fogják alkotni. Távlatilag a robotok az emberektől nem csak a bevezetőben említett nehéz, monoton, veszélyes munkát veszik át. Olyan bonyolult feladatokat is el tudnak majd látni, amire az emberek már fiziológiailag nem képesek. Tudatában kell lennünk annak is, hogy gyakorlatilag minden távirányított, ill. ilyen célra beprogramozott autonóm járművet terrorcselekmények kivitelezésére is fel lehet használni! A földi robottechnikai eszközök egyre nagyobb mértékű, körültekintő, biztonságos használata legalább részben, kiutat jelenthet több nagy katonai fejlesztés hagyományos eszközökkel megoldhatatlan zsákutcájából, például a Jövő Harcrendszerei programokban (FCS, FRES). A robotok bevetése emberéleteket menthet meg és a súlyos sérülések számát is csökkentheti.
30 Köszönöm a figyelmet!
SZÁRAZFÖLDI ROBOTTECHNIKAI ESZKÖZÖK TERVEZÉSÉNEK ÉS ALKALMAZÁSÁNAK BIZTONSÁGI SZEMPONTJAI
 IV. Évfolyam 2. szám - 2009. június Koleszár Béla Steyr-Daimler-Puch Spezialfahrzeug GmbH Company koleszar@tele2.at SZÁRAZFÖLDI ROBOTTECHNIKAI ESZKÖZÖK TERVEZÉSÉNEK ÉS ALKALMAZÁSÁNAK BIZTONSÁGI SZEMPONTJAI
IV. Évfolyam 2. szám - 2009. június Koleszár Béla Steyr-Daimler-Puch Spezialfahrzeug GmbH Company koleszar@tele2.at SZÁRAZFÖLDI ROBOTTECHNIKAI ESZKÖZÖK TERVEZÉSÉNEK ÉS ALKALMAZÁSÁNAK BIZTONSÁGI SZEMPONTJAI
MINDEN ÚJ ÖTLET HÁTTERÉBEN EGY KIHÍVÁS ÁLL
 IFC DO NOT PRINT 2 3 4 5 6 7 8 9 10 11 12 13 14 15 1 1 2 2 3 5 2 4 3 16 17 SKYACTIV TECHNOLOGY 18 19 6 1 7 5 2 4 3 8 20 21 A LEGBIZTONSÁGOSABB TARTÓZKODÁSI HELY AZ ÚTON Minden általunk gyártott Mazda számos
IFC DO NOT PRINT 2 3 4 5 6 7 8 9 10 11 12 13 14 15 1 1 2 2 3 5 2 4 3 16 17 SKYACTIV TECHNOLOGY 18 19 6 1 7 5 2 4 3 8 20 21 A LEGBIZTONSÁGOSABB TARTÓZKODÁSI HELY AZ ÚTON Minden általunk gyártott Mazda számos
Önvezető autók. Gondos Bálint. Óbudai Egyetem Neumann János Informatikai Kar Beágyazott és mobil informatika szakirány
 Önvezető autók Név: Gondos Bálint Dátum: 2015-11-30 2015-11-30átu Gondos Bálint Óbudai Egyetem Neumann János Informatikai Kar Beágyazott és mobil informatika szakirány A megoldott probléma: A teljesen
Önvezető autók Név: Gondos Bálint Dátum: 2015-11-30 2015-11-30átu Gondos Bálint Óbudai Egyetem Neumann János Informatikai Kar Beágyazott és mobil informatika szakirány A megoldott probléma: A teljesen
http://www.bosch-mobilitysolutions.com/en/de/specials/specials_safety/bosch_abs_1/abs_startpage.html
 1 http://www.bosch-mobilitysolutions.com/en/de/specials/specials_safety/bosch_abs_1/abs_startpage.html ABS: Antilock Braking System. A kerekek blokkolását gátolja meg, minden keréknél van egy keréksebesség-mérő
1 http://www.bosch-mobilitysolutions.com/en/de/specials/specials_safety/bosch_abs_1/abs_startpage.html ABS: Antilock Braking System. A kerekek blokkolását gátolja meg, minden keréknél van egy keréksebesség-mérő
Évszakváltás a közlekedésben
 Évszakváltás a közlekedésben A közlekedésben a téli időszak tudatos felkészülést igényel. Megváltoznak az út- és látási viszonyok, amelyekhez a gyalogosoknak és a járművezetőknek egyaránt alkalmazkodniuk
Évszakváltás a közlekedésben A közlekedésben a téli időszak tudatos felkészülést igényel. Megváltoznak az út- és látási viszonyok, amelyekhez a gyalogosoknak és a járművezetőknek egyaránt alkalmazkodniuk
Használati útmutató 1/5. 1) Termékleírás. A termék részei:
 Termékleírás. A termék részei:") 1/5 1) Termékleírás A beep&park /keeper egy olyan első és hátsó tolatóradar, amely egyben védi is parkoló járművét más autósok figyelmetlen parkolási manőverei ellen. A termék részei: Ellenőrző kijelző
1/5 1) Termékleírás A beep&park /keeper egy olyan első és hátsó tolatóradar, amely egyben védi is parkoló járművét más autósok figyelmetlen parkolási manőverei ellen. A termék részei: Ellenőrző kijelző
Autonóm jármű forgalomszimulátorba illesztése
 Autonóm jármű forgalomszimulátorba illesztése Szalai Mátyás 2018 Konzulens: Dr. Tettamanti Tamás A szimulációs feladat Miért hasznos? Biztonságos környezetben nyújt lehetőséget az autonóm járművek forgalmi
Autonóm jármű forgalomszimulátorba illesztése Szalai Mátyás 2018 Konzulens: Dr. Tettamanti Tamás A szimulációs feladat Miért hasznos? Biztonságos környezetben nyújt lehetőséget az autonóm járművek forgalmi
A budapesti villamosbalesetek jellemzői és tapasztalatai
 A budapesti villamosbalesetek jellemzői és tapasztalatai Előadó: Berhidi Zsolt BKV Zrt., Forgalombiztonsági és Üzemeltetési Szolgálat szolgálatvezető Cégfilozófia (BKV Zrt.) Küldetés A BKV a Főváros tulajdonában
A budapesti villamosbalesetek jellemzői és tapasztalatai Előadó: Berhidi Zsolt BKV Zrt., Forgalombiztonsági és Üzemeltetési Szolgálat szolgálatvezető Cégfilozófia (BKV Zrt.) Küldetés A BKV a Főváros tulajdonában
TestLine - vizsisktesztje-02 Minta feladatsor
 Hányadikként hajthat át a 1. kereszteződésen a jelű autó? (1 2:55 Normál helyes válasz) E Elsőként. Másodikként. Harmadikként. Negyedikként. Nem hajt át, mert Tanulóvezető. Ebben a forgalmi helyzetben
Hányadikként hajthat át a 1. kereszteződésen a jelű autó? (1 2:55 Normál helyes válasz) E Elsőként. Másodikként. Harmadikként. Negyedikként. Nem hajt át, mert Tanulóvezető. Ebben a forgalmi helyzetben
A ROBOTHADVISELÉS ETIKAI KÉRDÉSEI III
 A ROBOTHADVISELÉS ETIKAI KÉRDÉSEI III Robotok helyett emberek? Koleszár Béla Tartalom Bevezetés 1 Robotok Csernobilban 2 Etikai megfontolások 3 További szempontok 4 Robothadviselés 5 Gyártás, fejlesztés,
A ROBOTHADVISELÉS ETIKAI KÉRDÉSEI III Robotok helyett emberek? Koleszár Béla Tartalom Bevezetés 1 Robotok Csernobilban 2 Etikai megfontolások 3 További szempontok 4 Robothadviselés 5 Gyártás, fejlesztés,
Általános követelmények a kép tartalmával és minőségével kapcsolatban
 Általános követelmények a kép tartalmával és minőségével kapcsolatban A következő követelmények egyrészt azért fontosak, hogy megfelelően dokumentálják az eseményeket (bizonyítékként felhasználóak legyenek),
Általános követelmények a kép tartalmával és minőségével kapcsolatban A következő követelmények egyrészt azért fontosak, hogy megfelelően dokumentálják az eseményeket (bizonyítékként felhasználóak legyenek),
A katonai légijármű rendszermodellje A katonai légijármű lehet: A katonai légijármű bemenetei: a környezetből A katonai légijármű kimenetei:
 Seres György: A KATONAI LÉGIJÁRMŰ, MINT RENDSZER 2003-ban, a ROBOTHADVISELÉS 3 konferencián bemutattam a katonai rendszerek egy általános modelljét 1. Csak emlékeztetőül mutatom be az akkori előadás néhány
Seres György: A KATONAI LÉGIJÁRMŰ, MINT RENDSZER 2003-ban, a ROBOTHADVISELÉS 3 konferencián bemutattam a katonai rendszerek egy általános modelljét 1. Csak emlékeztetőül mutatom be az akkori előadás néhány
Intelligens Rendszerek
 Intelligens Rendszerek Robotok http://mobil.nik.uni-obuda.hu http://mobil.nik.uni-obuda.hu/tantargyak/irg/segedanyagok/ B Biology Biológiai mintára készített, E Electronics elektronikusan működtetett,
Intelligens Rendszerek Robotok http://mobil.nik.uni-obuda.hu http://mobil.nik.uni-obuda.hu/tantargyak/irg/segedanyagok/ B Biology Biológiai mintára készített, E Electronics elektronikusan működtetett,
Érzékelők az autonóm járművekben
 Érzékelők az autonóm járművekben Gáspár Péter Szirányi Tamás 1 Érzékelők Tartalom Motivációs háttér Környezetérzékelés célja Autóipari érzékelők Széria megoldások és ipari trendek 2 Motiváció: A járműipar
Érzékelők az autonóm járművekben Gáspár Péter Szirányi Tamás 1 Érzékelők Tartalom Motivációs háttér Környezetérzékelés célja Autóipari érzékelők Széria megoldások és ipari trendek 2 Motiváció: A járműipar
IV. Évfolyam 4. szám - 2009. december. Koleszár Béla koleszar@tele2.at
 IV. Évfolyam 4. szám - 2009. december Koleszár Béla koleszar@tele2.at A FÖLDI ROBOTTECHNIKAI ESZKÖZÖK INFORMATIKAI RÉSZEGYSÉGEIVEL SZEMBEN TÁMASZTOTT SPECIÁLIS (TEREPI KIVITELT IGÉNYLŐ) KÖVETELMÉNYEK RENDSZEREZÉSE,
IV. Évfolyam 4. szám - 2009. december Koleszár Béla koleszar@tele2.at A FÖLDI ROBOTTECHNIKAI ESZKÖZÖK INFORMATIKAI RÉSZEGYSÉGEIVEL SZEMBEN TÁMASZTOTT SPECIÁLIS (TEREPI KIVITELT IGÉNYLŐ) KÖVETELMÉNYEK RENDSZEREZÉSE,
LEGFONTOSABB KÖZÚTI JELZÉSEK Útvonaltípus jelző táblák
 LEGFONTOSABB KÖZÚTI JELZÉSEK Útvonaltípus jelző táblák Autópálya Autópálya Autópálya. kilométerre...km...km...km Autóút Autóút. Kilométerre Autóút Autóút. Kilométerre Elsőbbséget szabályozó jelzőtáblák
LEGFONTOSABB KÖZÚTI JELZÉSEK Útvonaltípus jelző táblák Autópálya Autópálya Autópálya. kilométerre...km...km...km Autóút Autóút. Kilométerre Autóút Autóút. Kilométerre Elsőbbséget szabályozó jelzőtáblák
A-Veszélyt jelző táblák
 A-Veszélyt jelző táblák A-001 Veszélyes útkanyarulat balra A-002 Veszélyes útkanyarulat jobbra A-003 Egymás utáni veszélyes útkanyarulatok, az első útkanyarulat balra A-004 Egymás utáni veszélyes útkanyarulatok,
A-Veszélyt jelző táblák A-001 Veszélyes útkanyarulat balra A-002 Veszélyes útkanyarulat jobbra A-003 Egymás utáni veszélyes útkanyarulatok, az első útkanyarulat balra A-004 Egymás utáni veszélyes útkanyarulatok,
Autonóm járművek megjelenésének társadalmi hatásai, várható következményei
 Autonóm járművek megjelenésének társadalmi hatásai, várható következményei Közlekedési balesetek és a közlekedő ember Szeminárium, workshop és tudományos ülés 2017. október 14. Apatóczky Tamás KTE Forgalombiztonsági
Autonóm járművek megjelenésének társadalmi hatásai, várható következményei Közlekedési balesetek és a közlekedő ember Szeminárium, workshop és tudományos ülés 2017. október 14. Apatóczky Tamás KTE Forgalombiztonsági
Sensor Technologies Kft. TrafficNET (közlekedés-információs rendszer)
") TrafficNET (közlekedés-információs rendszer) 1 1. Projektcél A TrafficNet projekt célja olyan közlekedés-információs rendszer megvalósítása, amely Kecskeméten és vonzáskörzetében közlekedőket valósidejű
TrafficNET (közlekedés-információs rendszer) 1 1. Projektcél A TrafficNet projekt célja olyan közlekedés-információs rendszer megvalósítása, amely Kecskeméten és vonzáskörzetében közlekedőket valósidejű
Mobileye okostelefon alkalmazás
 Mobileye okostelefon alkalmazás Használati útmutató 1. Bevezetés A Mobileye okostelefon alkalmazás olyan járművel csatlakoztatva működik, melybe telepítették a Mobileye 5 rendszert, hogy figyelmeztessen
Mobileye okostelefon alkalmazás Használati útmutató 1. Bevezetés A Mobileye okostelefon alkalmazás olyan járművel csatlakoztatva működik, melybe telepítették a Mobileye 5 rendszert, hogy figyelmeztessen
Közúti jelzőtáblák Az útvonal típusát jelző táblák
 Közúti jelzőtáblák Az útvonal típusát jelző táblák Autópálya Autópálya Autóút Autóút Főútvonal Főútvonal Elsőbbséget szabályozó jelzőtáblák Elsőbbségadás kötelező Állj! Elsőbbségadás kötelező A szembejövő
Közúti jelzőtáblák Az útvonal típusát jelző táblák Autópálya Autópálya Autóút Autóút Főútvonal Főútvonal Elsőbbséget szabályozó jelzőtáblák Elsőbbségadás kötelező Állj! Elsőbbségadás kötelező A szembejövő
A KONFERENCIA PROGRAMJA november 27.
 A KONFERENCIA PROGRAMJA 2008. november 27. 08.30-09.00 Regisztráció 09.00-09.05 09.05-09.10 Megnyitó Dr. Ujj András ezredes a ZMNE mb. tudományos rektorhelyettese Köszöntő Dr. Nagy László nyá. mk. ezredes
A KONFERENCIA PROGRAMJA 2008. november 27. 08.30-09.00 Regisztráció 09.00-09.05 09.05-09.10 Megnyitó Dr. Ujj András ezredes a ZMNE mb. tudományos rektorhelyettese Köszöntő Dr. Nagy László nyá. mk. ezredes
A Közúti Közlekedés Szabályai TERVEZET. Általános koncepció Lényeges kerékpárosokat érintő javaslatok
 A Közúti Közlekedés Szabályai TERVEZET Általános koncepció Lényeges kerékpárosokat érintő javaslatok Munkabizottsági anyag (Deák János, Dr. Fülöp Ágnes, Hóz Erzsébet, Dr. Major Róbert, Siska Tamás) KTI,
A Közúti Közlekedés Szabályai TERVEZET Általános koncepció Lényeges kerékpárosokat érintő javaslatok Munkabizottsági anyag (Deák János, Dr. Fülöp Ágnes, Hóz Erzsébet, Dr. Major Róbert, Siska Tamás) KTI,
Miről lesz szó? Videó tartalom elemzés (VCA) leegyszerűsített működése Kültéri védelem Közúthálózat megfigyelés Emberszámlálás
 leegyszerűsített működése Kültéri védelem Közúthálózat megfigyelés Emberszámlálás") Videóanalitikát mindenhova! Princz Adorján Miről lesz szó? Videó tartalom elemzés (VCA) leegyszerűsített működése Kültéri védelem Közúthálózat megfigyelés Emberszámlálás VCA alapú detektorok Videótartalom
Videóanalitikát mindenhova! Princz Adorján Miről lesz szó? Videó tartalom elemzés (VCA) leegyszerűsített működése Kültéri védelem Közúthálózat megfigyelés Emberszámlálás VCA alapú detektorok Videótartalom
Sajtóközlemény. Egyre sokoldalúbb vezetőtámogató rendszerek A Bosch rendszereivel biztonságosan és stresszmentesen érhetünk célba. 2012. december 17.
 Sajtóközlemény Egyre sokoldalúbb vezetőtámogató rendszerek A Bosch rendszereivel biztonságosan és stresszmentesen érhetünk célba 2012. december 17. A Bosch bővíti vezetőtámogató rendszereinek körét Az
Sajtóközlemény Egyre sokoldalúbb vezetőtámogató rendszerek A Bosch rendszereivel biztonságosan és stresszmentesen érhetünk célba 2012. december 17. A Bosch bővíti vezetőtámogató rendszereinek körét Az
KRESZ és közútkezelés
 KRESZ és közútkezelés Forgalmász napok Sopron 2013. június 12-13. Nagy Zoltán osztályvezető Magyar Közút NZRT. telefon: 819-9133 e-mail:nagy.zoltan@kozut.hu A józan paraszti ész hiánya minden területen
KRESZ és közútkezelés Forgalmász napok Sopron 2013. június 12-13. Nagy Zoltán osztályvezető Magyar Közút NZRT. telefon: 819-9133 e-mail:nagy.zoltan@kozut.hu A józan paraszti ész hiánya minden területen
Néhány hasznos információ egyéni utazók részére
 Néhány hasznos információ egyéni utazók részére Ausztria Országúton, lakott területen kívül 100 km/h Éjjel (22-05 óra között) az A10, az A13 és az A14 autópályán azonban csak max. 110 km/h Vannak továbbá
Néhány hasznos információ egyéni utazók részére Ausztria Országúton, lakott területen kívül 100 km/h Éjjel (22-05 óra között) az A10, az A13 és az A14 autópályán azonban csak max. 110 km/h Vannak továbbá
A sok jelzőtábla zavaró. Dr. Debreczeni Gábor előadása
 A sok jelzőtábla zavaró A jelzőtáblák mérete 4/2001. (I.31.) KöVim rendelet A jellemző méret 450 mm 600 mm 750 mm 900 mm 1000 mm A közlekedő személy segítése A pálya legyen egyszerű, egységes, akadálymentes,
A sok jelzőtábla zavaró A jelzőtáblák mérete 4/2001. (I.31.) KöVim rendelet A jellemző méret 450 mm 600 mm 750 mm 900 mm 1000 mm A közlekedő személy segítése A pálya legyen egyszerű, egységes, akadálymentes,
1. Alapelvek a közlekedésben
 1. Alapelvek a közlekedésben 1. Mit jelent a közlekedésben a bizalmi elv? a) Számíthat arra, hogy a KRESZ minden helyzetben és helyen pontosan szabályozza a közlekedésben részt vevők jogait és kötelességeit.
1. Alapelvek a közlekedésben 1. Mit jelent a közlekedésben a bizalmi elv? a) Számíthat arra, hogy a KRESZ minden helyzetben és helyen pontosan szabályozza a közlekedésben részt vevők jogait és kötelességeit.
HASZNÁLATI ÚTMUTATÓ. Gyártó: Steelmate Co., Ltd.
 HASZNÁLATI ÚTMUTATÓ Gyártó: Steelmate Co., Ltd. Fontos figyelmeztetés A parkolást segítő rendszer arra készült, hogy segítséget nyújtson a tolatásban. Nem helyettesíti a vezetőnek a tolatáskor általában
HASZNÁLATI ÚTMUTATÓ Gyártó: Steelmate Co., Ltd. Fontos figyelmeztetés A parkolást segítő rendszer arra készült, hogy segítséget nyújtson a tolatásban. Nem helyettesíti a vezetőnek a tolatáskor általában
A közutakon alkalmazott kerékpáros átvezetések a forgalomtechnikus szemével. Mocsári Tibor főmérnök
 A közutakon alkalmazott kerékpáros átvezetések a forgalomtechnikus szemével Mocsári Tibor főmérnök 2010. szeptember Kerékpáros Vasúti ájárók Közlekedésbiztonsági forgalombiztonsága Nap - NKH - KKK, szakmai
A közutakon alkalmazott kerékpáros átvezetések a forgalomtechnikus szemével Mocsári Tibor főmérnök 2010. szeptember Kerékpáros Vasúti ájárók Közlekedésbiztonsági forgalombiztonsága Nap - NKH - KKK, szakmai
KRESZ feladatlap (TÁBLAISMERET)
") Kor: Nem: férfi/nő Település:... Jogosítvány: Van/Nincs 1) Mi a tábla megnevezése? KRESZ feladatlap (TÁBLAISMERET) a. Egyéb veszély b. Vigyázz! Autó c. Elsőbbségadás kötelező 2) Mi a tábla megnevezése?
Kor: Nem: férfi/nő Település:... Jogosítvány: Van/Nincs 1) Mi a tábla megnevezése? KRESZ feladatlap (TÁBLAISMERET) a. Egyéb veszély b. Vigyázz! Autó c. Elsőbbségadás kötelező 2) Mi a tábla megnevezése?
ÚTMUTATÓ AUTÓSOKNAK A BIZTONSÁGOS KÖZLEKEDÉSHEZ KÖZLEKEDÉSI HATÓSÁGOK VEZETÉS- TECHNIKAI KISOKOS
 ÚTMUTATÓ AUTÓSOKNAK A BIZTONSÁGOS KÖZLEKEDÉSHEZ KÖZLEKEDÉSI HATÓSÁGOK VEZETÉS- TECHNIKAI KISOKOS MIELŐTT ELINDULNÁNK Ellenőrizzük a lámpák és a fékek működőképességét! A tolatólámpa, illetve a féklámpa
ÚTMUTATÓ AUTÓSOKNAK A BIZTONSÁGOS KÖZLEKEDÉSHEZ KÖZLEKEDÉSI HATÓSÁGOK VEZETÉS- TECHNIKAI KISOKOS MIELŐTT ELINDULNÁNK Ellenőrizzük a lámpák és a fékek működőképességét! A tolatólámpa, illetve a féklámpa
Autonóm - és hagyományos közúti járművek alkotta közlekedési rendszerek összehasonlító elemzése
 Budapesti Műszaki és Gazdaságtudományi Egyetem Közlekedésmérnöki és Járműmérnöki Kar Közlekedés- és Járműirányítási Tanszék Záróvizsga 2017.06.20. Autonóm - és hagyományos közúti járművek alkotta közlekedési
Budapesti Műszaki és Gazdaságtudományi Egyetem Közlekedésmérnöki és Járműmérnöki Kar Közlekedés- és Járműirányítási Tanszék Záróvizsga 2017.06.20. Autonóm - és hagyományos közúti járművek alkotta közlekedési
A es évek gyalogos és kerékpárosok részvételével bekövetkezett balesetek kutatása
 A 2013-2014-es évek gyalogos és kerékpárosok részvételével bekövetkezett balesetek kutatása Előadó: Dr. habil Lakatos István PhD dékánhelyettes, tanszékvezető Széchenyi István Egyetem, Közúti és Vasúti
A 2013-2014-es évek gyalogos és kerékpárosok részvételével bekövetkezett balesetek kutatása Előadó: Dr. habil Lakatos István PhD dékánhelyettes, tanszékvezető Széchenyi István Egyetem, Közúti és Vasúti
A KATONAI LÉGIJÁRMŰ, MINT RENDSZER. Seres György 2005
 A KATONAI LÉGIJÁRMŰ, MINT RENDSZER Seres György 2005 A KATONAI LÉGIJÁRMŰ, MINT RENDSZER Seres György 2005 2003-ban ban,, a ROBOTHADVISELÉS 3 konferencián bemutattam a katonai rendszerek egy általános modelljét
A KATONAI LÉGIJÁRMŰ, MINT RENDSZER Seres György 2005 A KATONAI LÉGIJÁRMŰ, MINT RENDSZER Seres György 2005 2003-ban ban,, a ROBOTHADVISELÉS 3 konferencián bemutattam a katonai rendszerek egy általános modelljét
Szárazföldi autonóm mobil robotok vezérlőrendszerének kialakítási lehetőségei. Kucsera Péter ZMNE Doktorandusz
 Szárazföldi autonóm mobil robotok vezérlőrendszerének kialakítási lehetőségei. Kucsera Péter ZMNE Doktorandusz A mobil robot vezérlőrendszerének feladatai Elvégzendő feladat Kommunikáció Vezérlő rendszer
Szárazföldi autonóm mobil robotok vezérlőrendszerének kialakítási lehetőségei. Kucsera Péter ZMNE Doktorandusz A mobil robot vezérlőrendszerének feladatai Elvégzendő feladat Kommunikáció Vezérlő rendszer
A gépjárművezető képzés jelentősége a közúti közlekedésbiztonság szempontjából
 Erős Pillérek Javuló Közlekedésbiztonság Közlekedésbiztonsági konferencia A gépjárművezető képzés jelentősége a közúti közlekedésbiztonság szempontjából Dr. Juhász János KTI Közlekedéstudományi Intézet
Erős Pillérek Javuló Közlekedésbiztonság Közlekedésbiztonsági konferencia A gépjárművezető képzés jelentősége a közúti közlekedésbiztonság szempontjából Dr. Juhász János KTI Közlekedéstudományi Intézet
2+1-1+2 sávos problémakör a hazai gyorsforgalmi utakon és autópályákon
 Közlekedési Tagozat 2+1-1+2 sávos problémakör a hazai gyorsforgalmi utakon és autópályákon 1 5. Közlekedési magatartás a 2+1 sávos utakon Siska Tamás és társai: Tóthné Temesi Kinga, dr. Csorja Zsuzsanna,
Közlekedési Tagozat 2+1-1+2 sávos problémakör a hazai gyorsforgalmi utakon és autópályákon 1 5. Közlekedési magatartás a 2+1 sávos utakon Siska Tamás és társai: Tóthné Temesi Kinga, dr. Csorja Zsuzsanna,
Intelligens közlekedési rendszer alkalmazásokkal a közlekedésbiztonság javításáért
 Új évtized, új kihívások a közlekedésbiztonságban közúti közlekedésbiztonsági konferencia Intelligens közlekedési rendszer alkalmazásokkal a közlekedésbiztonság javításáért Szűcs Lajos elnök ITS Hungary
Új évtized, új kihívások a közlekedésbiztonságban közúti közlekedésbiztonsági konferencia Intelligens közlekedési rendszer alkalmazásokkal a közlekedésbiztonság javításáért Szűcs Lajos elnök ITS Hungary
A KATONAI LÉGIJÁRMŰ RENDSZERMODELLJE A KATONAI LÉGIJÁRMŰ
 Seres György A KATONAI LÉGIJÁRMŰ RENDSZERMODELLJE A rendszerelmélet, mint új tudományos vizsgálati módszer, Angliában keletkezett, a második világháború idején, amikor a német légierő, a Luftwaffe támadásai
Seres György A KATONAI LÉGIJÁRMŰ RENDSZERMODELLJE A rendszerelmélet, mint új tudományos vizsgálati módszer, Angliában keletkezett, a második világháború idején, amikor a német légierő, a Luftwaffe támadásai
A forgalomsűrűség és a követési távolság kapcsolata
 1 A forgalomsűrűség és a követési távolság kapcsolata 6 Az áramlatsűrűség (forgalomsűrűség) a követési távolsággal ad egyértelmű összefüggést: a sűrűség reciprok értéke a(z) (átlagos) követési távolság.
1 A forgalomsűrűség és a követési távolság kapcsolata 6 Az áramlatsűrűség (forgalomsűrűség) a követési távolsággal ad egyértelmű összefüggést: a sűrűség reciprok értéke a(z) (átlagos) követési távolság.
A kerékpárosokra vonatkozó fontosabb KRESZ szabályok
 A kerékpárosokra vonatkozó fontosabb KRESZ szabályok Jelen összefoglalás csak a fontosabb szabályokat tartalmazza. A kerékpár a KRESZ értelmében jármű, tehát a vezetéséhez ugyanazok a feltételek szükségesek,
A kerékpárosokra vonatkozó fontosabb KRESZ szabályok Jelen összefoglalás csak a fontosabb szabályokat tartalmazza. A kerékpár a KRESZ értelmében jármű, tehát a vezetéséhez ugyanazok a feltételek szükségesek,
Vezető nélküli targoncák munkavédelmi kérdései Együtt működni! Péterffy Gábor Siófok,
 Együtt működni! Péterffy Gábor Siófok, 2018. 05. 18 Együtt működni! 1. Mi az az AGV? a. Megvezetés, tájékozódás b. Biztonsági berendezések, érzékelők. 2. A vezető nélküli targoncákra vonatkozó szabályok
Együtt működni! Péterffy Gábor Siófok, 2018. 05. 18 Együtt működni! 1. Mi az az AGV? a. Megvezetés, tájékozódás b. Biztonsági berendezések, érzékelők. 2. A vezető nélküli targoncákra vonatkozó szabályok
 47 sz. főút - 4415 j. út Hódmezővásárhely, Kálvin János tér, jelzőlámpás csomópont átépítése kétsávos turbó típusú körforgalmú csomóponttá 2009. A Kálvin János téri csomópont Hódmezővásárhelyen, a 47 sz.
47 sz. főút - 4415 j. út Hódmezővásárhely, Kálvin János tér, jelzőlámpás csomópont átépítése kétsávos turbó típusú körforgalmú csomóponttá 2009. A Kálvin János téri csomópont Hódmezővásárhelyen, a 47 sz.
Mennyit ér a biztonság?
 Mennyit ér a biztonság? Eredeti, utángyártott és hamisított alkatrészek Az alkatrészek másodlagos felhasználása Előadó: Kovács Tamás főosztályvezető Nemzeti Közlekedési Hatóság A közlekedési hatóságok
Mennyit ér a biztonság? Eredeti, utángyártott és hamisított alkatrészek Az alkatrészek másodlagos felhasználása Előadó: Kovács Tamás főosztályvezető Nemzeti Közlekedési Hatóság A közlekedési hatóságok
Járműinformatika Bevezetés
 Járműinformatika Bevezetés 2018/2019. tanév, II. félév Dr. Kovács Szilveszter E-mail: szkovacs@iit.uni-miskolc.hu Informatika Intézet 107/a. Tel: (46) 565-111 / 21-07 Autó elektronika az 1970-es években
Járműinformatika Bevezetés 2018/2019. tanév, II. félév Dr. Kovács Szilveszter E-mail: szkovacs@iit.uni-miskolc.hu Informatika Intézet 107/a. Tel: (46) 565-111 / 21-07 Autó elektronika az 1970-es években
FIGYELEM ELŐADÁS ELŐTTED
 KENDERESY KOPPÁNY SZABÓ BENCE SIÓFOK FIGYELEM ELŐADÁS ELŐTTED 2018 JÁTÉK Közlekedj okosan játék Minden helyes válasz SZÁM Számsor TELEFON SZÁM Első SMS NYER SIÓFOK JÁTÉKSZABÁLY 2018 LEVEL 0 SZEMET MEGVEZETŐ
KENDERESY KOPPÁNY SZABÓ BENCE SIÓFOK FIGYELEM ELŐADÁS ELŐTTED 2018 JÁTÉK Közlekedj okosan játék Minden helyes válasz SZÁM Számsor TELEFON SZÁM Első SMS NYER SIÓFOK JÁTÉKSZABÁLY 2018 LEVEL 0 SZEMET MEGVEZETŐ
A JÁRMŰVEZETŐ JOGÁLLÁSA ÉS A FELELŐSSÉGE
 A KÖZLEKEDÉSBIZTONSÁG ÉS A JOG A JÁRMŰVEZETŐ JOGÁLLÁSA ÉS A FELELŐSSÉGE Dr. Buzási Gábor Ügyvéd buzasidr@gmail.com 2017. Október 14. Budapest AZ ELSŐ BALESET 1896 augusztus 17-én a negyvennégy esztendős
A KÖZLEKEDÉSBIZTONSÁG ÉS A JOG A JÁRMŰVEZETŐ JOGÁLLÁSA ÉS A FELELŐSSÉGE Dr. Buzási Gábor Ügyvéd buzasidr@gmail.com 2017. Október 14. Budapest AZ ELSŐ BALESET 1896 augusztus 17-én a negyvennégy esztendős
B kategóriás vizsgázók (fő)
") Az Európai Uniós projektek gyakorlati hasznosítása a hazai gépjárművezető képzés fejlesztésben Ipolyi-Keller Imre Budapest, 2010. február 12. 1 A Module Close To projekt Történnek balesetek, de nem velem.
Az Európai Uniós projektek gyakorlati hasznosítása a hazai gépjárművezető képzés fejlesztésben Ipolyi-Keller Imre Budapest, 2010. február 12. 1 A Module Close To projekt Történnek balesetek, de nem velem.
Hogyan járulhat hozzá a Rendőrség a közúti közlekedésbiztonság további javításához? Budapest, november 30.
 Dr. Hatala József r. altábornagy országos rendőrfőkapitány Hogyan járulhat hozzá a Rendőrség a közúti közlekedésbiztonság további javításához? Budapest, 2010. november 30. Rendőrség és közlekedésbiztonság
Dr. Hatala József r. altábornagy országos rendőrfőkapitány Hogyan járulhat hozzá a Rendőrség a közúti közlekedésbiztonság további javításához? Budapest, 2010. november 30. Rendőrség és közlekedésbiztonság
SZÁRAZFÖLDI ROBOTOK, AZ UAV-K SZEGÉNY ROKONAI? 1. BEVEZETÉS
 Koleszár Béla SZÁRAZFÖLDI ROBOTOK, AZ UAV-K SZEGÉNY ROKONAI? 1. BEVEZETÉS Repüléstudományi konferenciáról lévén szó, a címben bátran használtam az UAV 1 rövidítést, amit a katonai szakzsargonban gyakorlatilag
Koleszár Béla SZÁRAZFÖLDI ROBOTOK, AZ UAV-K SZEGÉNY ROKONAI? 1. BEVEZETÉS Repüléstudományi konferenciáról lévén szó, a címben bátran használtam az UAV 1 rövidítést, amit a katonai szakzsargonban gyakorlatilag
Snowskate. Használati útmutató. Tchibo GmbH D Hamburg 87516AB6X5VI
 Snowskate hu Használati útmutató Tchibo GmbH D-22290 Hamburg 87516AB6X5VI 2016-04 Kedves Vásárlónk! A snowskate a 7 év feletti gyerekeknek igazi szórakozást nyújt a hóban. A snowskate-ezés nem snowboardozás,
Snowskate hu Használati útmutató Tchibo GmbH D-22290 Hamburg 87516AB6X5VI 2016-04 Kedves Vásárlónk! A snowskate a 7 év feletti gyerekeknek igazi szórakozást nyújt a hóban. A snowskate-ezés nem snowboardozás,
Kerékpáros balesetek és a forgalom Helyzetelemzés és következtetések. László János Magyar Kerékpárosklub
 Kerékpáros balesetek és a forgalom Helyzetelemzés és következtetések László János Magyar Kerékpárosklub Kiindulás Országos és Budapesti adatok Tanulságok és feladatok Kiindulás Közös nevező Adatok korlátai
Kerékpáros balesetek és a forgalom Helyzetelemzés és következtetések László János Magyar Kerékpárosklub Kiindulás Országos és Budapesti adatok Tanulságok és feladatok Kiindulás Közös nevező Adatok korlátai
kerékpáros nyom (pl: Iszák utca) kerékpáros nyom (pl: Sportcsarnok))
 kerékpáros nyom (pl: Sportcsarnok))") 2012. 12.10. A biztonságos közlekedésért I. - Hol szabad kerékpározni? Kaposváron elkészült 7 kilométer hosszú kerékpárforgalmi úthálózat. Mivel a városban közlekedőknek több, Kaposváron eddig ismeretlen
2012. 12.10. A biztonságos közlekedésért I. - Hol szabad kerékpározni? Kaposváron elkészült 7 kilométer hosszú kerékpárforgalmi úthálózat. Mivel a városban közlekedőknek több, Kaposváron eddig ismeretlen
TB-006D4 dönthető kerékpár szállító szerelési útmutató
 TB-006D4 dönthető kerékpár szállító szerelési útmutató A kerékpárszállító az első használat előtt figyelmes összeszerelést igényel. Ez a folyamat megfelelő körültekintéssel házilag is elvégezhető, de amennyiben
TB-006D4 dönthető kerékpár szállító szerelési útmutató A kerékpárszállító az első használat előtt figyelmes összeszerelést igényel. Ez a folyamat megfelelő körültekintéssel házilag is elvégezhető, de amennyiben
SPY LP828. Visszapillantó tükör rendszer. Kijelző. A kijelző első és hátsó része: Tulajdonságok:
 SPY LP828 Visszapillantó tükör rendszer Kijelző A kijelző első és hátsó része: Tulajdonságok: Parkoló szenzor + Bluetooth + Alkoholszonda, három az egyben, emberközpontú formatervezés és valódi szituáció
SPY LP828 Visszapillantó tükör rendszer Kijelző A kijelző első és hátsó része: Tulajdonságok: Parkoló szenzor + Bluetooth + Alkoholszonda, három az egyben, emberközpontú formatervezés és valódi szituáció
17. Tájékoztatást adó jelzőtáblák
 17. Tájékoztatást adó jelzőtáblák (1) A tájékoztatást adó jelzőtáblák a következők: a) 113 Kijelölt gyalogos-átkelőhely (103. ábra); a tábla azt jelzi, hogy az úttestet a táblánál útburkolati jellel kijelölt
17. Tájékoztatást adó jelzőtáblák (1) A tájékoztatást adó jelzőtáblák a következők: a) 113 Kijelölt gyalogos-átkelőhely (103. ábra); a tábla azt jelzi, hogy az úttestet a táblánál útburkolati jellel kijelölt
16. Veszélyt jelző táblák
 16. Veszélyt jelző táblák (1) A veszélyt jelző táblák: a) Veszélyes útkanyarulat balra (64. ábra), Veszélyes útkanyarulat jobbra (65. ábra); 64. ábra 65. ábra b) Egymás utáni veszélyes útkanyarulatok ;
16. Veszélyt jelző táblák (1) A veszélyt jelző táblák: a) Veszélyes útkanyarulat balra (64. ábra), Veszélyes útkanyarulat jobbra (65. ábra); 64. ábra 65. ábra b) Egymás utáni veszélyes útkanyarulatok ;
A felelősség határai a tudásalapú társadalomban a közlekedés példáján. Palkovics László BME
 A felelősség határai a tudásalapú társadalomban a közlekedés példáján Palkovics László BME Az autonóm közúti közlekedési rendszerek (jármű + közlekedési környezet) fejlődésének indokai a humán vezető képességei
A felelősség határai a tudásalapú társadalomban a közlekedés példáján Palkovics László BME Az autonóm közúti közlekedési rendszerek (jármű + közlekedési környezet) fejlődésének indokai a humán vezető képességei
21/1998. (IV. 17.) IKIM rendelet. a gépek biztonsági követelményeiről és megfelelőségének tanúsításáról. Általános rendelkezések
 IKIM rendelet. a gépek biztonsági követelményeiről és megfelelőségének tanúsításáról. Általános rendelkezések") 21/1998. (IV. 17.) IKIM rendelet a gépek biztonsági követelményeiről és megfelelőségének tanúsításáról A fogyasztóvédelemről szóló 1997. évi CLV. törvény 56. -ának a) pontjában kapott felhatalmazás alapján
21/1998. (IV. 17.) IKIM rendelet a gépek biztonsági követelményeiről és megfelelőségének tanúsításáról A fogyasztóvédelemről szóló 1997. évi CLV. törvény 56. -ának a) pontjában kapott felhatalmazás alapján
Módosítások a segédmotoros kerékpárral közlekedőkre vonatkozó közlekedési szabályokban 2006 2011.
 Módosítások a segédmotoros kerékpárral közlekedőkre vonatkozó közlekedési szabályokban 2006 2011. 1/1975. (II. 5.) KPM BM együttes rendelet a közúti közlekedés szabályairól II. RÉSZ Közúti jelzések A rendőr
Módosítások a segédmotoros kerékpárral közlekedőkre vonatkozó közlekedési szabályokban 2006 2011. 1/1975. (II. 5.) KPM BM együttes rendelet a közúti közlekedés szabályairól II. RÉSZ Közúti jelzések A rendőr
Van-e összefüggés a közúti közlekedés biztonsága és a termékhamisítás között?
 Berzai Zsolt r. alezredes ORFK Közlekedésrendészeti Főosztály Autópálya-felügyeletei és Balesetmegelőzési Osztály kiemelt főreferens Tel.: +36-1443-5690 E-mail.: berzaizs@orfk.police.hu Van-e összefüggés
Berzai Zsolt r. alezredes ORFK Közlekedésrendészeti Főosztály Autópálya-felügyeletei és Balesetmegelőzési Osztály kiemelt főreferens Tel.: +36-1443-5690 E-mail.: berzaizs@orfk.police.hu Van-e összefüggés
A hazai közlekedésbiztonsági helyzet alakulása a jogszabály-változások tükrében, a továbblépés lehetőségei
 Dr. Halmosi Zsolt r. vezérőrnagy rendőrségi főtanácsos országos rendőrfőkapitány-helyettes rendészeti főigazgató A hazai közlekedésbiztonsági helyzet alakulása a jogszabály-változások tükrében, a továbblépés
Dr. Halmosi Zsolt r. vezérőrnagy rendőrségi főtanácsos országos rendőrfőkapitány-helyettes rendészeti főigazgató A hazai közlekedésbiztonsági helyzet alakulása a jogszabály-változások tükrében, a továbblépés
MŰSZAKI ÉS GAZDASÁGTUDOMÁNYI EGYETEM KÖZLEKEDÉSMÉRNÖKI ÉS JÁRMŰMÉRNÖKI KAR
 KÖZÚTI ADATBÁZISOK ÉS ADAT-NYILVÁNTARTÓ RENDSZEREK Lakatos András Tartalom Bevezetés Közútra vonatkozó adatgyűjtési rendszerek története Adatbázisok, adatgyűjtési rendszerek napjainkban Adatok hasznosítása
KÖZÚTI ADATBÁZISOK ÉS ADAT-NYILVÁNTARTÓ RENDSZEREK Lakatos András Tartalom Bevezetés Közútra vonatkozó adatgyűjtési rendszerek története Adatbázisok, adatgyűjtési rendszerek napjainkban Adatok hasznosítása
B Biology Biológiai mintára készített, E Electronics elektronikusan működtetett, A Aesthetics esztétikusan kivitelezett, M Mechanics mechanikák.
 Robotok B Biology Biológiai mintára készített, E Electronics elektronikusan működtetett, A Aesthetics esztétikusan kivitelezett, M Mechanics mechanikák. B Biology Biológiai mintára készített, E Electronics
Robotok B Biology Biológiai mintára készített, E Electronics elektronikusan működtetett, A Aesthetics esztétikusan kivitelezett, M Mechanics mechanikák. B Biology Biológiai mintára készített, E Electronics
13. Utasítást adó jelzőtáblák
 13. Utasítást adó jelzőtáblák (1) 47 Az utasítást adó jelzőtáblák: a) 48 Kötelező haladási irány (17 19. ábra); a tábla azt jelzi, hogy az útkereszteződésben a táblán lévő nyíl (nyilak) által jelzett irányban
13. Utasítást adó jelzőtáblák (1) 47 Az utasítást adó jelzőtáblák: a) 48 Kötelező haladási irány (17 19. ábra); a tábla azt jelzi, hogy az útkereszteződésben a táblán lévő nyíl (nyilak) által jelzett irányban
Méretek AGV1000-UR. Vonóerő AGV1000-UR (kg) kétirányú vezető nélküli szállítórendszer (FTS) aláfutó raklapkocsi szállító. fokozatmentes, max.
 kétirányú vezető nélküli szállítórendszer (FTS) aláfutó raklapkocsi szállító. fokozatmentes, max.") ADATLAP Movexx AGV1000-UR 2018 Műszaki adatok AGV1000-UR Méretek AGV1000-UR Megnevezés Alkalmazás Kocsik súlya Aláfutási magasság Sebesség Kanyarsebesség Kanyar sugár Navigáció Hajtás Hajtott kerekek Fék
ADATLAP Movexx AGV1000-UR 2018 Műszaki adatok AGV1000-UR Méretek AGV1000-UR Megnevezés Alkalmazás Kocsik súlya Aláfutási magasság Sebesség Kanyarsebesség Kanyar sugár Navigáció Hajtás Hajtott kerekek Fék
INFO DIAG DIAGNOSZTIKAI MUSZER
 CITROËN DTAV INFO DIAG DIAGNOSZTIKAI MUSZER LEÁNYVÁLLALATOK / IMPORTOR ÚJ CITROËN GÉPJÁRMU FORGALMAZÓK - Új gépjármu felkészíto - Kampánykoordinátor HIVATALOS CITROËN MÁRKASZERVIZEK - Vevoszolgálati vezeto,
CITROËN DTAV INFO DIAG DIAGNOSZTIKAI MUSZER LEÁNYVÁLLALATOK / IMPORTOR ÚJ CITROËN GÉPJÁRMU FORGALMAZÓK - Új gépjármu felkészíto - Kampánykoordinátor HIVATALOS CITROËN MÁRKASZERVIZEK - Vevoszolgálati vezeto,
A FELDERÍTÉS ÁLTAL BIZTOSÍTOTT ADATOK A TERVEZÉS ÉS A VÉGREHAJTÁS KÜLÖNBÖZŐ FÁZISAIBAN
 NEMZETVÉDELMI EGYETEMI KÖZLEMÉNYEK D. HÉJJ ISTVN nyá. ezredes 1 FELDEÍTÉS LTL BIZTOSÍTOTT DTOK TEVEZÉS ÉS VÉGEHJTS KÜLÖNBÖZŐ FZISIBN katonai felderítés feladata a terepről, az időjárásról, illetve a szembenálló
NEMZETVÉDELMI EGYETEMI KÖZLEMÉNYEK D. HÉJJ ISTVN nyá. ezredes 1 FELDEÍTÉS LTL BIZTOSÍTOTT DTOK TEVEZÉS ÉS VÉGEHJTS KÜLÖNBÖZŐ FZISIBN katonai felderítés feladata a terepről, az időjárásról, illetve a szembenálló
SZÉCHENYI ISTVÁN EGYETEM. Alf Martiensen
 A tehergépkocsi balesetek in-depth elemzésének jelentősége Az európai áruforgalom mintegy 70 %-a a tehergépjárműveken keresztül bonyolódik. A tehergépkocsik a vasúti mennyiség mintegy 10-szeresét szállítják.
A tehergépkocsi balesetek in-depth elemzésének jelentősége Az európai áruforgalom mintegy 70 %-a a tehergépjárműveken keresztül bonyolódik. A tehergépkocsik a vasúti mennyiség mintegy 10-szeresét szállítják.
Autóipari beágyazott rendszerek. Integrált és szétcsatolt rendszerek
 Autóipari beágyazott rendszerek Integrált és szétcsatolt rendszerek 1 Integrált és szétcsatolt rendszerek Szétcsatolt rendszer 1:1 hozzárendelés ECUk és funkciók között Minden funkció külön egységen van
Autóipari beágyazott rendszerek Integrált és szétcsatolt rendszerek 1 Integrált és szétcsatolt rendszerek Szétcsatolt rendszer 1:1 hozzárendelés ECUk és funkciók között Minden funkció külön egységen van
Tanpálya Vezetéstechnikai Centrum Kft.
 Tanpálya Vezetéstechnikai Centrum Kft. Karácsonyi akció állami vállalatok részére 2011 Miért érdemes minket választani: AJÁNDÉK UTALVÁNY Magyarország legmodernebb, és egyetlen ilyen jellegû létesítménye
Tanpálya Vezetéstechnikai Centrum Kft. Karácsonyi akció állami vállalatok részére 2011 Miért érdemes minket választani: AJÁNDÉK UTALVÁNY Magyarország legmodernebb, és egyetlen ilyen jellegû létesítménye
A (közösségi) közlekedés biztonsága érdekében
 közlekedés biztonsága érdekében") Általános Közlekedési Tagozat, Közlekedésjogi és Igazgatási Szakosztály Szakmai találkozó Nemzeti Közszolgálati Egyetem, 2019. február 19. A (közösségi) közlekedés biztonsága érdekében Autóbuszok közlekedése
Általános Közlekedési Tagozat, Közlekedésjogi és Igazgatási Szakosztály Szakmai találkozó Nemzeti Közszolgálati Egyetem, 2019. február 19. A (közösségi) közlekedés biztonsága érdekében Autóbuszok közlekedése
Élettartam teszteknél alkalmazott programstruktúra egy váltóvezérlő példáján keresztül
 Élettartam teszteknél alkalmazott programstruktúra egy váltóvezérlő példáján keresztül 1 Tartalom Miről is lesz szó? Bosch GS-TC Automata sebességváltó TCU (Transmission Control Unit) Élettartam tesztek
Élettartam teszteknél alkalmazott programstruktúra egy váltóvezérlő példáján keresztül 1 Tartalom Miről is lesz szó? Bosch GS-TC Automata sebességváltó TCU (Transmission Control Unit) Élettartam tesztek
SZEZONRA FEL! KÖZLEKEDÉSI HATÓSÁGOK SZEZONNYITÓ KERÉKPÁROS KISOKOS
 SZEZONRA FEL! KÖZLEKEDÉSI HATÓSÁGOK SZEZONNYITÓ KERÉKPÁROS KISOKOS HOGYAN KÉSZÍTSD FEL A KERÉK- PÁRODAT TAVASZRA? Mosd le, töröld át a vázat, és nézd meg az alkatrészeket! Győződj meg róla, hogy nincs-e
SZEZONRA FEL! KÖZLEKEDÉSI HATÓSÁGOK SZEZONNYITÓ KERÉKPÁROS KISOKOS HOGYAN KÉSZÍTSD FEL A KERÉK- PÁRODAT TAVASZRA? Mosd le, töröld át a vázat, és nézd meg az alkatrészeket! Győződj meg róla, hogy nincs-e
VESZPRÉMI RENDŐRKAPITÁNYSÁG
 VESZPRÉMI RENDŐRKAPITÁNYSÁG BŰNMEGELŐZÉSI HÍRLEVELE 2013. MÁRCIUS T A R T A L O M: 1. Gépkocsifeltörések, gépkocsilopások megelőzése 2. A kerékpáros közlekedés szabályairól 1. Gépkocsifeltörések, gépkocsilopások
VESZPRÉMI RENDŐRKAPITÁNYSÁG BŰNMEGELŐZÉSI HÍRLEVELE 2013. MÁRCIUS T A R T A L O M: 1. Gépkocsifeltörések, gépkocsilopások megelőzése 2. A kerékpáros közlekedés szabályairól 1. Gépkocsifeltörések, gépkocsilopások
Vezetéstechnikai tréningek fontossága
 Vezetéstechnikai tréningek fontossága Preambulum: Robbanásszerűen nőtt hazánkban a közúti közlekedésben résztvevők és ezzel együtt a járműállomány száma. Az ország lakosságának több mint egyharmada kb.
Vezetéstechnikai tréningek fontossága Preambulum: Robbanásszerűen nőtt hazánkban a közúti közlekedésben résztvevők és ezzel együtt a járműállomány száma. Az ország lakosságának több mint egyharmada kb.
Intelligens közlekedési rendszerek ÁTTEKINTÉS, MŰKÖDÉS. Schuchmann Gábor
 Intelligens közlekedési rendszerek ÁTTEKINTÉS, MŰKÖDÉS ADATIGÉNY sávonkénti járműszám járműosztályok sebességek Környezeti körülmények szabályozási körülmények hálózati adottságok korábbi adatok (változás
Intelligens közlekedési rendszerek ÁTTEKINTÉS, MŰKÖDÉS ADATIGÉNY sávonkénti járműszám járműosztályok sebességek Környezeti körülmények szabályozási körülmények hálózati adottságok korábbi adatok (változás
VESZPRÉMI RENDŐRKAPITÁNYSÁG 2015. N O V E M B E R
 VESZPRÉMI RENDŐRKAPITÁNYSÁG BŰNMEGELŐZÉSI HÍRLEVELE 2015. N O V E M B E R T A R T A L O M: 1. Gyalogos közlekedés 2. Látni és Látszani?! 1. Gyalogos közlekedés Közlekedjünk biztonságosan Az utóbbi időszakban
VESZPRÉMI RENDŐRKAPITÁNYSÁG BŰNMEGELŐZÉSI HÍRLEVELE 2015. N O V E M B E R T A R T A L O M: 1. Gyalogos közlekedés 2. Látni és Látszani?! 1. Gyalogos közlekedés Közlekedjünk biztonságosan Az utóbbi időszakban
HU Egyesülve a sokféleségben HU A8-0005/4. Módosítás
 8.2.2017 A8-0005/4 4 Jean-Luc Schaffhauser 1 bekezdés felszólítja a Bizottságot, hogy tegyen javaslatot a kiberfizikai rendszerek, az autonóm rendszerek, az intelligens autonóm robotok és alkategóriáik
8.2.2017 A8-0005/4 4 Jean-Luc Schaffhauser 1 bekezdés felszólítja a Bizottságot, hogy tegyen javaslatot a kiberfizikai rendszerek, az autonóm rendszerek, az intelligens autonóm robotok és alkategóriáik
A puha közlekedők, avagy a mikromobilitás
 A puha közlekedők, avagy a mikromobilitás Siófoki Közlekedési Konferencia 2019. május 15. Polányi Péter MMK Közlekedési Tagozat Kerékpáros Szakosztály Az első fecske (a kecske) egészséges gyors olcsó praktikus
A puha közlekedők, avagy a mikromobilitás Siófoki Közlekedési Konferencia 2019. május 15. Polányi Péter MMK Közlekedési Tagozat Kerékpáros Szakosztály Az első fecske (a kecske) egészséges gyors olcsó praktikus
18. Útburkolati jelek
 18. Útburkolati jelek (1) Az útburkolati jelek: a) úttest szélét jelző vonal: hosszirányú folytonos az útkereszteződésnél szaggatott vonal; b) 146 terelővonal: hosszirányú egy vagy [olyan útszakaszon,
18. Útburkolati jelek (1) Az útburkolati jelek: a) úttest szélét jelző vonal: hosszirányú folytonos az útkereszteződésnél szaggatott vonal; b) 146 terelővonal: hosszirányú egy vagy [olyan útszakaszon,
Csatlakozási állapot megjelenítése
 Csatlakozási állapot megjelenítése Ellenőrizheti a vevő és a jármű között a csatlakozás állapotát. Ezek a kapcsolatok felelősek az olyan információkért, mint a GPS információ és a parkolási jelzések. 1
Csatlakozási állapot megjelenítése Ellenőrizheti a vevő és a jármű között a csatlakozás állapotát. Ezek a kapcsolatok felelősek az olyan információkért, mint a GPS információ és a parkolási jelzések. 1
Hol és hogyan közlekedhetünk kerékpárral és segédmotoros kerékpárral:
 Hol és hogyan közlekedhetünk kerékpárral és segédmotoros kerékpárral: (a hatályos KRESZ KPM-BM együttes rendelet a közúti közlekedés szabályairól 54. ) (1) Kerékpárral a kerékpárúton, a kerékpársávon vagy
Hol és hogyan közlekedhetünk kerékpárral és segédmotoros kerékpárral: (a hatályos KRESZ KPM-BM együttes rendelet a közúti közlekedés szabályairól 54. ) (1) Kerékpárral a kerékpárúton, a kerékpársávon vagy
Az a személy akinek joga a légijármûvel kapcsolatos minden kérdés végsõ eldöntése a repülés idõtartama alatt: A parancsnok
 1. oldal 1. 2. 100413 212 00 00 00 Légijog Kivéve, ha egy légiforgalmi irányító egységtõl erre engedélyt kapott, VFR szerint mûködõ légijármû nem léphet be egy repülõtéri irányító körzetbe, illetve nem
1. oldal 1. 2. 100413 212 00 00 00 Légijog Kivéve, ha egy légiforgalmi irányító egységtõl erre engedélyt kapott, VFR szerint mûködõ légijármû nem léphet be egy repülõtéri irányító körzetbe, illetve nem
Válassza a nyugalmat!
 Válassza a nyugalmat! Kert- és garázskapuk automatizálása Válassza a nyugalmat! A kényelem, ami jár Önnek... A garázs- és kertkaput működtetheti egy falra szerelt vezérlőegységgel, vagy akár egy kis távirányítóval
Válassza a nyugalmat! Kert- és garázskapuk automatizálása Válassza a nyugalmat! A kényelem, ami jár Önnek... A garázs- és kertkaput működtetheti egy falra szerelt vezérlőegységgel, vagy akár egy kis távirányítóval
TM Fékezés és állomás vezérlő modul
 TM-22272 Fékezés és állomás vezérlő modul Használati útmutató 2012 BioDigit Ltd. Minden jog fenntartva. A dokumentum sokszorosítása, tartalmának közzététele bármilyen formában, beleértve az elektronikai
TM-22272 Fékezés és állomás vezérlő modul Használati útmutató 2012 BioDigit Ltd. Minden jog fenntartva. A dokumentum sokszorosítása, tartalmának közzététele bármilyen formában, beleértve az elektronikai
Veszélyek, balesetek, sérülések, mentés, megelőzés új módszerei
 Az ember és a XXI. század közlekedése Budapest, 2016. október 15. Veszélyek, balesetek, sérülések, mentés, megelőzés új módszerei X. Szeminárium, Workshop KTE Közlekedésegészségügyi Szakosztály, a KTE
Az ember és a XXI. század közlekedése Budapest, 2016. október 15. Veszélyek, balesetek, sérülések, mentés, megelőzés új módszerei X. Szeminárium, Workshop KTE Közlekedésegészségügyi Szakosztály, a KTE
KRESZ vizsga tesztlap
 1. Szeszes ital hatása alatt jármvet vezetni A) csak akkor veszélyes, ha a vezet nem szokott hozzá az alkoholhoz. B) a reflexek tompulása miatt már kisebb mennyiség fogyasztása esetén is veszélyes. C)
1. Szeszes ital hatása alatt jármvet vezetni A) csak akkor veszélyes, ha a vezet nem szokott hozzá az alkoholhoz. B) a reflexek tompulása miatt már kisebb mennyiség fogyasztása esetén is veszélyes. C)
A közúti közlekedés biztonsága
 Óberling József r. ezredes rendőrségi főtanácsos ORFK Közlekedésrendészeti Főosztály vezetője A közúti közlekedés biztonsága Közlekedésfejlesztés Magyarországon, aktualitások konferencia Balatonföldvár,
Óberling József r. ezredes rendőrségi főtanácsos ORFK Közlekedésrendészeti Főosztály vezetője A közúti közlekedés biztonsága Közlekedésfejlesztés Magyarországon, aktualitások konferencia Balatonföldvár,
Intelligens Közlekedési Rendszerek 2
 Intelligens Közlekedési Rendszerek 2 Máté Miklós 2016 Október 11 1 / 14 Szenzor (érzékelő): mérés, detektálás Mérés elmélet emlékeztető Jó mérőműszer tulajdonságai Érzékeny a mérendő tulajdonságra Érzéketlen
Intelligens Közlekedési Rendszerek 2 Máté Miklós 2016 Október 11 1 / 14 Szenzor (érzékelő): mérés, detektálás Mérés elmélet emlékeztető Jó mérőműszer tulajdonságai Érzékeny a mérendő tulajdonságra Érzéketlen
AUTONÓM JÁRMŰVEK A POLGÁRI JOGI FELELŐSSÉG ÉS A SZERZŐI JOG SZEMSZÖGÉBŐL
 AIDA XV. Budapest Biztosítási Kollokvium AUTONÓM JÁRMŰVEK A POLGÁRI JOGI FELELŐSSÉG ÉS A SZERZŐI JOG SZEMSZÖGÉBŐL Dr. Somkutas Péter IT ARCHITECT, JOGÁSZ AZ ÖNVEZETŐ AUTÓ ELSŐ ISMÉRVE: NEM VEZETI ÖNMAGÁT.
AIDA XV. Budapest Biztosítási Kollokvium AUTONÓM JÁRMŰVEK A POLGÁRI JOGI FELELŐSSÉG ÉS A SZERZŐI JOG SZEMSZÖGÉBŐL Dr. Somkutas Péter IT ARCHITECT, JOGÁSZ AZ ÖNVEZETŐ AUTÓ ELSŐ ISMÉRVE: NEM VEZETI ÖNMAGÁT.
Steel Mate PTSV402. tolatóradar kamerával és monitorral
 Steel Mate PTSV402 tolatóradar kamerával és monitorral 1 Steel Mate PTSV402 tolatóradar kamerával és monitorral Használati és beszerelési útmutató Nyilatkozat A parkolást segítı rendszert arra tervezték,
Steel Mate PTSV402 tolatóradar kamerával és monitorral 1 Steel Mate PTSV402 tolatóradar kamerával és monitorral Használati és beszerelési útmutató Nyilatkozat A parkolást segítı rendszert arra tervezték,
A kerékpár-közlekedés biztonságának fejlesztési lehetőségei
 A kerékpár-közlekedés biztonságának fejlesztési lehetőségei A kutatás a Gazdasági és Közlekedési Minisztérium Kerékpáros Magyarország program 2007 keretében készül dr. Makó Emese Széchenyi István Egyetem
A kerékpár-közlekedés biztonságának fejlesztési lehetőségei A kutatás a Gazdasági és Közlekedési Minisztérium Kerékpáros Magyarország program 2007 keretében készül dr. Makó Emese Széchenyi István Egyetem
HARCJÁRMŰVEK TOVÁBBFEJLESZTÉSE ÉS A SZÁRAZFÖLDI ROBOTOK
 III. Évfolyam 1. szám - 2008. március Koleszár Béla Steyr-Daimler-Puch Spezialfahrzeug GmbH Company, ZMNE PhD hallgató koleszar@tele2.at HARCJÁRMŰVEK TOVÁBBFEJLESZTÉSE ÉS A SZÁRAZFÖLDI ROBOTOK Absztrakt
III. Évfolyam 1. szám - 2008. március Koleszár Béla Steyr-Daimler-Puch Spezialfahrzeug GmbH Company, ZMNE PhD hallgató koleszar@tele2.at HARCJÁRMŰVEK TOVÁBBFEJLESZTÉSE ÉS A SZÁRAZFÖLDI ROBOTOK Absztrakt
Tehergépkocsi és mezőgazdasági járművek kanyarodási jellemzőinek kísérleti vizsgálata
 Tehergépkocsi és mezőgazdasági járművek kanyarodási jellemzőinek kísérleti vizsgálata Bell Márton*. Mayer Antal**Ignácz Ferenc*** *okl. közlekedésmérnök, IbB Hungary Mérnöki Szakértői Iroda, Budapest,
Tehergépkocsi és mezőgazdasági járművek kanyarodási jellemzőinek kísérleti vizsgálata Bell Márton*. Mayer Antal**Ignácz Ferenc*** *okl. közlekedésmérnök, IbB Hungary Mérnöki Szakértői Iroda, Budapest,
Méretek AGV1000. Műszaki adatok AGV1000. Vonóerő AGV1000 (kg) irányfüggetlen vezető nélküli szállítórendszer (FTS) fokozatmentes, max.
 irányfüggetlen vezető nélküli szállítórendszer (FTS) fokozatmentes, max.") ADATLAP Movexx AGV1000 2018 Műszaki adatok AGV1000 Méretek AGV1000 Megnevezés Alkalmazás Kocsik súlya Sebesség Kanyarsebesség Kanyar sugár Navigáció Hajtás Hajtott kerekek Fék Rögzítőfék Energiaellátás
ADATLAP Movexx AGV1000 2018 Műszaki adatok AGV1000 Méretek AGV1000 Megnevezés Alkalmazás Kocsik súlya Sebesség Kanyarsebesség Kanyar sugár Navigáció Hajtás Hajtott kerekek Fék Rögzítőfék Energiaellátás
Tisvol standard=adr jármű
 Tisvol standard=adr jármű Minden járművünk 2S/SM fékrendszerrel van felszerelve. Ez alacsony ADR előírásnak felel meg, de az ügyfél kérésére további, magasabb szintnek megfelelő kiegészítőkkel is fel tudjuk
Tisvol standard=adr jármű Minden járművünk 2S/SM fékrendszerrel van felszerelve. Ez alacsony ADR előírásnak felel meg, de az ügyfél kérésére további, magasabb szintnek megfelelő kiegészítőkkel is fel tudjuk
I. A közúti közlekedéssel kapcsolatos alapvető ismeretek
 1 HERMAN OTTÓ ÁLT. ISK. és BUDAÖRSI LOGOPÉDIAI INT. KÖZLEKEDÉSI ISMERETEK tantárgyi követelmények a 8. évfolyamos tanulók részére A tantárgy célja, hogy az általános iskolai tanulmányaikat befejező tanulók
1 HERMAN OTTÓ ÁLT. ISK. és BUDAÖRSI LOGOPÉDIAI INT. KÖZLEKEDÉSI ISMERETEK tantárgyi követelmények a 8. évfolyamos tanulók részére A tantárgy célja, hogy az általános iskolai tanulmányaikat befejező tanulók