Érzékelők az autonóm járművekben
|
|
|
- Zalán Fehér
- 6 évvel ezelőtt
- Látták:
Átírás


1 Érzékelők az autonóm járművekben Gáspár Péter Szirányi Tamás 1 Érzékelők


2 Tartalom Motivációs háttér Környezetérzékelés célja Autóipari érzékelők Széria megoldások és ipari trendek 2


3 Motiváció: A járműipar átalakul Alternatív hajtások jelentek meg (hibrid/elektromos) A vezetéstámogató rendszerek helyett az önvezető rendszerek az új hozzáadott érték A járműipari gyártók és beszállítók mellett megjelentek az infokommunikációs vállalatok a járműpiacon. Új kutatási és fejlesztési területek jelentek meg hazánkban a tesztpálya építés kapcsán is.

4 Az autonóm (önvezető) járművek Önállóan hoznak döntéseket, módosítják a jármű működését Csökkentik a kritikus járműállapotok és helyzetek kialakulását A jármű üzemének hatékonyságát javítják A biztonságot és a megbízhatóságot növelik

5 Kihívások Technológiai korlátok miatt az autonóm járműveket általában nem lehet emberi képességekkel és tapasztalattal felruházni. Erősségük az éberségük és a kényelmük, viszont betanítást igényelnek és a kölcsönhatásaikat kezelni szükséges. Nagyszámú különleges esetet kell kezelni. Kerékpárosokkal, gyalogosokkal való kölcsönhatások kezelése kritikus. Példák: az útra kiszaladó gyermek, vezetők kézmodulatokkal való jelzése nem egyértelmű szituációkban. Az autonóm járművek másként látják és értelmezik a környezetet, emiatt másként is vezetnek. Fontos, hogy az utak jól karbantartottak legyenek, a kereszteződéseken való áthaladás egyértelmű szabályokkal történjen.



6 Környezetérzékelés és szituáció értékelés Környezetérzékelés Szenzorok Kép- és jelfeldolgozási technológiák Közlekedési szituáció értékelése Adattudomány, Gépi tanulás Mesterséges intelligencia Hierarchikus döntési szintek Döntési struktúrák, mélytanulás Biztonság Validáció, verifikáció



7 Autonóm járműirányítás Szituáció és cél alapú döntések Trajektória tervezések Intelligens beavatkozások Csoportos döntések Mesterséges intelligencia és gépi tanulás alkalmazása Tesztelés, validáció, verifikáció



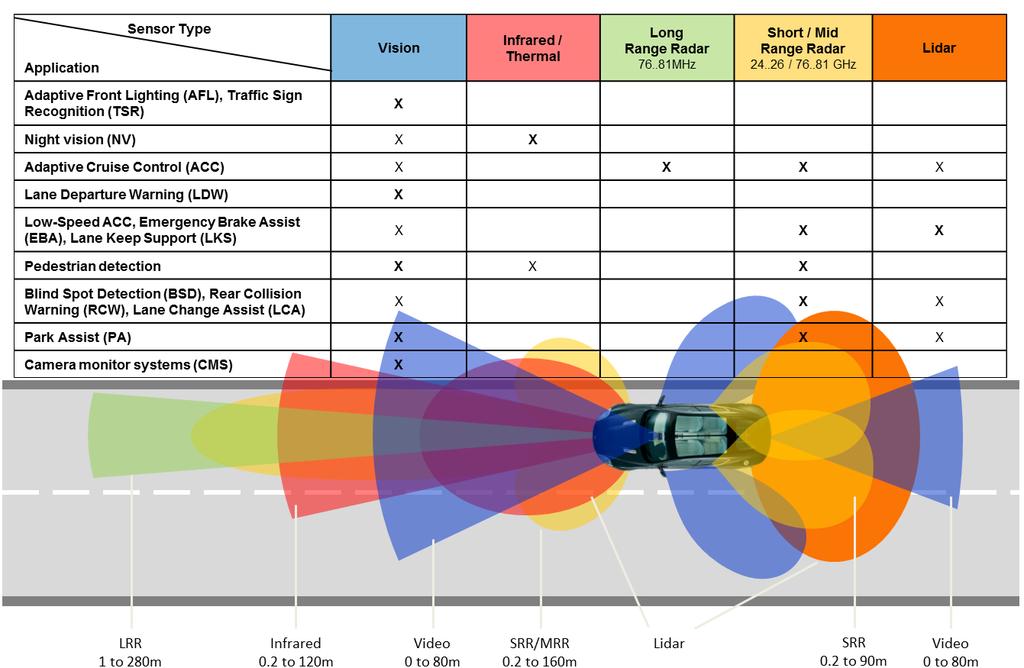
8 Környezetérzékelés célja Statikus és dinamikus objektumok detektálása relatív pozíció, relatív sebesség osztályozás (kerékpár, gyalogos, táblák, jelzőlámpák) 0,5-250 m hatótávolság változó környezet (fényviszonyok, páratartalom, por) különböző tulajdonságú objektumok (anyag, szín, forma) Az objektumok, valamint a környezeti tényezők változatossága óriási kihívás


9 Érzékelők alkalmazási lehetőségei Csak kamera alapú rendszerek? Az emberi vezetésből kiindulva lehetségesnek tűnik A balesetek döntő részét emberi hiba okozza Az automatikus rendszereknek nagyságrendekkel magasabb biztonsági szintet kell elérnie Válasz: szenzorfúzió Minden térrészt egyszerre több szenzor is megfigyel és kiértékel. Redundancia (meleg tartalék) Konfidencia: nagyobb hatótávolság, objektum jellemzők Egymás hátrányos tulajdonságait kiküszöbölhetik





10 Szenzortípusok Kamera Ultrahang Radar Lézerszkenner Infrakamera Kamera (szélvédőn) Ultrahang (lökhárítón) Infrakamera (fényszóró mellett) Lézerszkenner (csomagtartó közepén) Radar (lökhárítón)
11 Funkciói Kamera és képfeldolgozás Az ADAS rendszerek és az önvezető járművek legfontosabb szenzora. Sávdetektálás Sávelhagyás figyelmeztetés Sávkövetés Sávváltás Objektumdetektálás és klasszifikálás Adaptív tempomat Ütközéselkerülő- és vészfékrendszerek Jelzőtábla, jelzőlámpa detektálás Figyelmeztető rendszerek Tempomat Energiaoptimalizálás Funkciói Parkolás Éjszakai vezetés funkciói Előnyök Részletes információk a környezetről Objektumok formája, színe jól detektálható Hátrányok Fényviszonyokra, szennyeződésre érzékeny Mono kamerával kevésbé megbízható a távolságmérés (a mélység érzékelése) Jelentős számítási erőforrást igényel

12 Kamera tipikus funkciói
13 Radar Az ADAS rendszerek és az önvezető járművek másik fontos szenzora. Kamerával együtt alkalmazzák. Funkciói Adaptív tempomat Ütközéselkerülő- és vészfékrendszerek Objektumdetektálás és klasszifikálás (kamerával együtt) Előnyök Fényviszonyoktól függetlenül megbízható, időjárási körülményektől csak kismértékben függ Biztonságkritikus funkciókhoz használható Kisméretű és viszonylag olcsó Hátrányok Kis felbontás Visszaverődések zavarásokat okoznak Radarhullámot visszaverő műtárgyakat ki kell szűrni

14 Objektumkövetés radarral
15 Ultrahang Elsősorban kényelmi funkciókat lát el. A legújabb generációjú rendszerek már képesek biztonságkritikus funkciók ellátására. Funkciói Automata parkolási rendszerek Parkolóhely keresés Parkolás, kiállás Alacsony sebességű adaptív tempomat Közlekedési torlódás asszisztens Előnyök Nagyon olcsó Megfelelő kialakítás esetén biztonsági funkciókat is elláthat (szennyeződések kompenzálása, hatótávolság és látószög állítható) Hátrányok Kis hatótáv Poros környezetben tovább csökken a hatótáv Pontos objektum lokalizációra alapesetben nem alkalmas
16 Ultrahang szenzor alkalmazási példa
17 Funkciói Referenciamérés teszteléshez Objektumdetektálás és klasszifikálás Sávdetektálás Útállapot mérés LIDAR Lézerszkenner, amellyel pontos 3D-dimenziós pontfelhő állítható elő a környezetről. A kamera és a radar előnyeit ötvözi. Előnyök Pontos, nagyfelbontású 3D mérés Környezeti hatásokra nem érzékeny Hátrányok Drága, de a 2D lidar már alkalmazott felsőkategóriás járművekben Sötét, fényelnyelő felületet problémát okozhat

18 LIDAR objektum detektálás példa 1 db Velodyne és 5 db SICK lidar integrációja
19 Széria megoldások


20 Járműipari trendek Minden szenzortípus 360 fokos lefedettséget fog adni Különböző hatótávú radarok Különböző látószögű kamerák A 2D lézerszkennerek helyett 360 fokos 3D LIDAR-ok jönnek Még mindig rendkívül drágák

21 Példa: Audi A8 2018
Járműipari környezetérzékelés
 Járműipari környezetérzékelés 3. előadás Dr. Aradi Szilárd LIDAR és lézer bevezetés Light Detection and Ranging vagy Laser Imaging, Detection and Ranging: olyan mérőeszköz, amely a fény segítségével mér
Járműipari környezetérzékelés 3. előadás Dr. Aradi Szilárd LIDAR és lézer bevezetés Light Detection and Ranging vagy Laser Imaging, Detection and Ranging: olyan mérőeszköz, amely a fény segítségével mér
Önvezető autók. Gondos Bálint. Óbudai Egyetem Neumann János Informatikai Kar Beágyazott és mobil informatika szakirány
 Önvezető autók Név: Gondos Bálint Dátum: 2015-11-30 2015-11-30átu Gondos Bálint Óbudai Egyetem Neumann János Informatikai Kar Beágyazott és mobil informatika szakirány A megoldott probléma: A teljesen
Önvezető autók Név: Gondos Bálint Dátum: 2015-11-30 2015-11-30átu Gondos Bálint Óbudai Egyetem Neumann János Informatikai Kar Beágyazott és mobil informatika szakirány A megoldott probléma: A teljesen
Takács Árpád K+F irányok
 Takács Árpád K+F irányok 2016. 06. 09. arpad.takacs@adasworks.com A jövőre tervezünk Az AdasWorks mesterséges intelligencia alapú szoftverterfejlesztéssel és teljes önvezető megoldásokkal forradalmasítja
Takács Árpád K+F irányok 2016. 06. 09. arpad.takacs@adasworks.com A jövőre tervezünk Az AdasWorks mesterséges intelligencia alapú szoftverterfejlesztéssel és teljes önvezető megoldásokkal forradalmasítja
Autóipari beágyazott rendszerek. Kockázatelemzés
 Autóipari beágyazott rendszerek Kockázatelemzés 1 Biztonságkritikus rendszer Beágyazott rendszer Aminek hibája Anyagi vagyont, vagy Emberéletet veszélyeztet Tipikus példák ABS, ESP, elektronikus szervokormány
Autóipari beágyazott rendszerek Kockázatelemzés 1 Biztonságkritikus rendszer Beágyazott rendszer Aminek hibája Anyagi vagyont, vagy Emberéletet veszélyeztet Tipikus példák ABS, ESP, elektronikus szervokormány
MINDEN ÚJ ÖTLET HÁTTERÉBEN EGY KIHÍVÁS ÁLL
 IFC DO NOT PRINT 2 3 4 5 6 7 8 9 10 11 12 13 14 15 1 1 2 2 3 5 2 4 3 16 17 SKYACTIV TECHNOLOGY 18 19 6 1 7 5 2 4 3 8 20 21 A LEGBIZTONSÁGOSABB TARTÓZKODÁSI HELY AZ ÚTON Minden általunk gyártott Mazda számos
IFC DO NOT PRINT 2 3 4 5 6 7 8 9 10 11 12 13 14 15 1 1 2 2 3 5 2 4 3 16 17 SKYACTIV TECHNOLOGY 18 19 6 1 7 5 2 4 3 8 20 21 A LEGBIZTONSÁGOSABB TARTÓZKODÁSI HELY AZ ÚTON Minden általunk gyártott Mazda számos
Autonóm járművek megjelenésének társadalmi hatásai, várható következményei
 Autonóm járművek megjelenésének társadalmi hatásai, várható következményei Közlekedési balesetek és a közlekedő ember Szeminárium, workshop és tudományos ülés 2017. október 14. Apatóczky Tamás KTE Forgalombiztonsági
Autonóm járművek megjelenésének társadalmi hatásai, várható következményei Közlekedési balesetek és a közlekedő ember Szeminárium, workshop és tudományos ülés 2017. október 14. Apatóczky Tamás KTE Forgalombiztonsági
Alter Róbert Báró Csaba Sensor Technologies Kft
 Közúti forgalomelemzés kamerával e_traffic Alter Róbert Báró Csaba Sensor Technologies Kft Előadás témái Cégbemutató Videó analitikai eljárások Forgalomszámláló eszközök összehasonlítása e_traffic forgalomelemző
Közúti forgalomelemzés kamerával e_traffic Alter Róbert Báró Csaba Sensor Technologies Kft Előadás témái Cégbemutató Videó analitikai eljárások Forgalomszámláló eszközök összehasonlítása e_traffic forgalomelemző
11. Intelligens rendszerek
 SZÉCHENYI ISTVÁN EGYETEM MŰSZAKI TUDOMÁNYI KAR KÖZLEKEDÉSÉPÍTÉSI TANSZÉK KÖZÚTI FORGALOMTECHNIKA 1. Tantárgykód: NGB_ET009_1 11. Intelligens rendszerek Dr. Kálmán László egyetemi adjunktus Győr, 2014.
SZÉCHENYI ISTVÁN EGYETEM MŰSZAKI TUDOMÁNYI KAR KÖZLEKEDÉSÉPÍTÉSI TANSZÉK KÖZÚTI FORGALOMTECHNIKA 1. Tantárgykód: NGB_ET009_1 11. Intelligens rendszerek Dr. Kálmán László egyetemi adjunktus Győr, 2014.
Autonóm járműrendszerek kutatása a zalaegerszegi autonóm tesztpályához kapcsolódóan. Pályázati témák (3) Téma rövid tartalma
 Téma rövid tartalma") Pályázati témák (3) 1 Mesterséges intelligencia alapú döntési modellek fejlesztése és tesztelése valós autonóm járműves környezetben Szimulációs környezetben kifejlesztett döntési modellek vizsgálata valós
Pályázati témák (3) 1 Mesterséges intelligencia alapú döntési modellek fejlesztése és tesztelése valós autonóm járműves környezetben Szimulációs környezetben kifejlesztett döntési modellek vizsgálata valós
CARE. Biztonságos. otthonok idős embereknek CARE. Biztonságos otthonok idős embereknek 2010-09-02. Dr. Vajda Ferenc Egyetemi docens
 CARE Biztonságos CARE Biztonságos otthonok idős embereknek otthonok idős embereknek 2010-09-02 Dr. Vajda Ferenc Egyetemi docens 3D Érzékelés és Mobilrobotika kutatócsoport Budapesti Műszaki és Gazdaságtudományi
CARE Biztonságos CARE Biztonságos otthonok idős embereknek otthonok idős embereknek 2010-09-02 Dr. Vajda Ferenc Egyetemi docens 3D Érzékelés és Mobilrobotika kutatócsoport Budapesti Műszaki és Gazdaságtudományi
http://www.bosch-mobilitysolutions.com/en/de/specials/specials_safety/bosch_abs_1/abs_startpage.html
 1 http://www.bosch-mobilitysolutions.com/en/de/specials/specials_safety/bosch_abs_1/abs_startpage.html ABS: Antilock Braking System. A kerekek blokkolását gátolja meg, minden keréknél van egy keréksebesség-mérő
1 http://www.bosch-mobilitysolutions.com/en/de/specials/specials_safety/bosch_abs_1/abs_startpage.html ABS: Antilock Braking System. A kerekek blokkolását gátolja meg, minden keréknél van egy keréksebesség-mérő
EEE Kutatólaboratórium MTA-SZTAKI Magyar Tudományos Akadémia
 DElosztott I S T R I B U T EEsemények D EV E N T S A NElemzé A L Y S I S se R E SKutatólaboratór E A R C H L A B O R A T Oium R Y L I D A R B a s e d S u r v e i l l a n c e Városi LIDAR adathalmaz szegmentációja
DElosztott I S T R I B U T EEsemények D EV E N T S A NElemzé A L Y S I S se R E SKutatólaboratór E A R C H L A B O R A T Oium R Y L I D A R B a s e d S u r v e i l l a n c e Városi LIDAR adathalmaz szegmentációja
Közúti forgalomszámlálás e_sensor rendszerrel. 2012.06.04 2012.06.10 Budapest dugódíj projekt (sajtóanyag)
") Közúti forgalomszámlálás e_sensor rendszerrel 2012.06.04 2012.06.10 Budapest dugódíj projekt (sajtóanyag) 1 Cégbemutató A Sensor Technologies Kft. videó analitikai rendszereket fejleszt budapesti székhellyel.
Közúti forgalomszámlálás e_sensor rendszerrel 2012.06.04 2012.06.10 Budapest dugódíj projekt (sajtóanyag) 1 Cégbemutató A Sensor Technologies Kft. videó analitikai rendszereket fejleszt budapesti székhellyel.
Miről lesz szó? Videó tartalom elemzés (VCA) leegyszerűsített működése Kültéri védelem Közúthálózat megfigyelés Emberszámlálás
 leegyszerűsített működése Kültéri védelem Közúthálózat megfigyelés Emberszámlálás") Videóanalitikát mindenhova! Princz Adorján Miről lesz szó? Videó tartalom elemzés (VCA) leegyszerűsített működése Kültéri védelem Közúthálózat megfigyelés Emberszámlálás VCA alapú detektorok Videótartalom
Videóanalitikát mindenhova! Princz Adorján Miről lesz szó? Videó tartalom elemzés (VCA) leegyszerűsített működése Kültéri védelem Közúthálózat megfigyelés Emberszámlálás VCA alapú detektorok Videótartalom
AZ AUTONÓM KÖZÚTI JÁRMŰVEK TESZTELÉSI ÉS VALIDÁLÁSI KIHÍVÁSAI
 AZ AUTONÓM KÖZÚTI JÁRMŰVEK TESZTELÉSI ÉS VALIDÁLÁSI KIHÍVÁSAI Dr. SZALAY, Zsolt HAVEit demonstrációs jármű 2 Speciális kihívások Jogi felelősség Kié a felelősség, illetve hogyan lehet a járművekbe felelősséget
AZ AUTONÓM KÖZÚTI JÁRMŰVEK TESZTELÉSI ÉS VALIDÁLÁSI KIHÍVÁSAI Dr. SZALAY, Zsolt HAVEit demonstrációs jármű 2 Speciális kihívások Jogi felelősség Kié a felelősség, illetve hogyan lehet a járművekbe felelősséget
Intelligens közlekedési rendszer alkalmazásokkal a közlekedésbiztonság javításáért
 Új évtized, új kihívások a közlekedésbiztonságban közúti közlekedésbiztonsági konferencia Intelligens közlekedési rendszer alkalmazásokkal a közlekedésbiztonság javításáért Szűcs Lajos elnök ITS Hungary
Új évtized, új kihívások a közlekedésbiztonságban közúti közlekedésbiztonsági konferencia Intelligens közlekedési rendszer alkalmazásokkal a közlekedésbiztonság javításáért Szűcs Lajos elnök ITS Hungary
ÉRZÉKELŐK ÉS BEAVATKOZÓK I. PÉLDÁK - FELADATOK
 ÉRZÉKELŐK ÉS BEAVATKOZÓK I. PÉLDÁK - FELADATOK Dr. Soumelidis Alexandros 2018.09.06. BME KÖZLEKEDÉSMÉRNÖKI ÉS JÁRMŰMÉRNÖKI KAR 32708-2/2017/INTFIN SZÁMÚ EMMI ÁLTAL TÁMOGATOTT TANANYAG Idei fő példafeladat:
ÉRZÉKELŐK ÉS BEAVATKOZÓK I. PÉLDÁK - FELADATOK Dr. Soumelidis Alexandros 2018.09.06. BME KÖZLEKEDÉSMÉRNÖKI ÉS JÁRMŰMÉRNÖKI KAR 32708-2/2017/INTFIN SZÁMÚ EMMI ÁLTAL TÁMOGATOTT TANANYAG Idei fő példafeladat:
KERÉKPÁR ÉS KERÉKPÁROS
 KERÉKPÁR ÉS KERÉKPÁROS A kerékpározás hatásai nem igényel fosszilis energiát externáliák nem szennyezi a levegőt, nincs széndioxid kibocsátása nem okoz zajt kevés helyet foglal infrastruktúra igénye alacsony
KERÉKPÁR ÉS KERÉKPÁROS A kerékpározás hatásai nem igényel fosszilis energiát externáliák nem szennyezi a levegőt, nincs széndioxid kibocsátása nem okoz zajt kevés helyet foglal infrastruktúra igénye alacsony
Vonalas közlekedési létesítmények mobil térképezésével kapcsolatos saját fejlesztések
 www.geodezia.hu Geodézia Zrt. 31. Vándorgyűlés Szekszárd, 2017. július 6-8. Vonalas közlekedési létesítmények mobil térképezésével kapcsolatos saját fejlesztések Csörgits Péter Miről lesz szó? VONALAS
www.geodezia.hu Geodézia Zrt. 31. Vándorgyűlés Szekszárd, 2017. július 6-8. Vonalas közlekedési létesítmények mobil térképezésével kapcsolatos saját fejlesztések Csörgits Péter Miről lesz szó? VONALAS
FIGYELEM ELŐADÁS ELŐTTED
 KENDERESY KOPPÁNY SZABÓ BENCE SIÓFOK FIGYELEM ELŐADÁS ELŐTTED 2018 JÁTÉK Közlekedj okosan játék Minden helyes válasz SZÁM Számsor TELEFON SZÁM Első SMS NYER SIÓFOK JÁTÉKSZABÁLY 2018 LEVEL 0 SZEMET MEGVEZETŐ
KENDERESY KOPPÁNY SZABÓ BENCE SIÓFOK FIGYELEM ELŐADÁS ELŐTTED 2018 JÁTÉK Közlekedj okosan játék Minden helyes válasz SZÁM Számsor TELEFON SZÁM Első SMS NYER SIÓFOK JÁTÉKSZABÁLY 2018 LEVEL 0 SZEMET MEGVEZETŐ
Közlekedési rendszerek és e-mobilitás
 Közlekedési rendszerek és e-mobilitás II. E-Mobilitás konferencia Budapesti Corvinus Egyetem, 2017. június 15. Dr. Mosóczi László közlekedésért felelős helyettes államtitkár Mi jut eszünkbe ha ma a környezetkímélő
Közlekedési rendszerek és e-mobilitás II. E-Mobilitás konferencia Budapesti Corvinus Egyetem, 2017. június 15. Dr. Mosóczi László közlekedésért felelős helyettes államtitkár Mi jut eszünkbe ha ma a környezetkímélő
Járműipari környezetérzékelés
 Járműipari környezetérzékelés 2. előadás Dr. Aradi Szilárd Az ultrahangos érzékelés története Ultrasound_range_diagram.png: Original uploader was LightYear at en.wikipediaultrasound_range_diagram_png_(sk).svg:,
Járműipari környezetérzékelés 2. előadás Dr. Aradi Szilárd Az ultrahangos érzékelés története Ultrasound_range_diagram.png: Original uploader was LightYear at en.wikipediaultrasound_range_diagram_png_(sk).svg:,
Távérzékelés, a jöv ígéretes eszköze
 Távérzékelés, a jöv ígéretes eszköze Ritvayné Szomolányi Mária Frombach Gabriella VITUKI CONSULT Zrt. A távérzékelés segítségével: különböz6 magasságból, tetsz6leges id6ben és a kívánt hullámhossz tartományokban
Távérzékelés, a jöv ígéretes eszköze Ritvayné Szomolányi Mária Frombach Gabriella VITUKI CONSULT Zrt. A távérzékelés segítségével: különböz6 magasságból, tetsz6leges id6ben és a kívánt hullámhossz tartományokban
A jövő útjai - Intelligens közlekedési rendszerek az üzemeltetésben
 A jövő útjai - Intelligens közlekedési rendszerek az üzemeltetésben Tomaschek Tamás Attila forgalomszabályozási csoportvezető 41. Útügyi Napok Balatonfüred, 2016. szeptember 21-22. A pálya elválaszthatatlan
A jövő útjai - Intelligens közlekedési rendszerek az üzemeltetésben Tomaschek Tamás Attila forgalomszabályozási csoportvezető 41. Útügyi Napok Balatonfüred, 2016. szeptember 21-22. A pálya elválaszthatatlan
INTELLIGENCE ON YOUR SIDE WWW.INTELLIO.EU WWW.INTELLIO.EU WWW.INTELLIO.EU WWW.INTELLIO.EU WWW.INTELLIO.EU
 Intelligens videó megfigyelési megoldások Kópházi János ügyvezetı igazgató 2008.03.26 Napirend INTELLIGENCE ON YOUR SIDE Cégbemutató Intelligens videó rendszer Esettanulmányok Költséghatékonysági számítások
Intelligens videó megfigyelési megoldások Kópházi János ügyvezetı igazgató 2008.03.26 Napirend INTELLIGENCE ON YOUR SIDE Cégbemutató Intelligens videó rendszer Esettanulmányok Költséghatékonysági számítások
AZ E-MOBILITÁS ÖSSZEFÜGGÉSEI, LEHETŐSÉGEI. Kisgyörgy Lajos BME Út és Vasútépítési Tanszék
 AZ E-MOBILITÁS ÖSSZEFÜGGÉSEI, LEHETŐSÉGEI Kisgyörgy Lajos BME Út és Vasútépítési Tanszék E-MOBILITÁS Elektromos és önvezető járművek Intelligens közlekedés Jármű jármű kommunikáció Jármű infrastruktúra
AZ E-MOBILITÁS ÖSSZEFÜGGÉSEI, LEHETŐSÉGEI Kisgyörgy Lajos BME Út és Vasútépítési Tanszék E-MOBILITÁS Elektromos és önvezető járművek Intelligens közlekedés Jármű jármű kommunikáció Jármű infrastruktúra
Intelligens Közlekedési Rendszerek 2
 Intelligens Közlekedési Rendszerek 2 Máté Miklós 2016 Október 11 1 / 14 Szenzor (érzékelő): mérés, detektálás Mérés elmélet emlékeztető Jó mérőműszer tulajdonságai Érzékeny a mérendő tulajdonságra Érzéketlen
Intelligens Közlekedési Rendszerek 2 Máté Miklós 2016 Október 11 1 / 14 Szenzor (érzékelő): mérés, detektálás Mérés elmélet emlékeztető Jó mérőműszer tulajdonságai Érzékeny a mérendő tulajdonságra Érzéketlen
Mobil térképezés új trendek a digitális téradatgyűjtésben
 Mobil térképezés új trendek a digitális téradatgyűjtésben Építési geodézia a gyakorlatban fórum Mérnökgeodézia a tervezés és létesítményüzemeltetés támogatásában 2011. október 13-14 Geodézia Földmérőmérnöki
Mobil térképezés új trendek a digitális téradatgyűjtésben Építési geodézia a gyakorlatban fórum Mérnökgeodézia a tervezés és létesítményüzemeltetés támogatásában 2011. október 13-14 Geodézia Földmérőmérnöki
Intelligens közlekedési rendszerek ÁTTEKINTÉS, MŰKÖDÉS. Schuchmann Gábor
 Intelligens közlekedési rendszerek ÁTTEKINTÉS, MŰKÖDÉS ADATIGÉNY sávonkénti járműszám járműosztályok sebességek Környezeti körülmények szabályozási körülmények hálózati adottságok korábbi adatok (változás
Intelligens közlekedési rendszerek ÁTTEKINTÉS, MŰKÖDÉS ADATIGÉNY sávonkénti járműszám járműosztályok sebességek Környezeti körülmények szabályozási körülmények hálózati adottságok korábbi adatok (változás
Foscam kamera szett: FN3108XE-B4-1T - 4 x 1Mp, 1TB HDD, saját PoE - KIFUTOTT, NEM ELÉRHETŐ
 ONLINECAMERA - Nagy Látószög, WiFi, PoE, NVR, Infra, Memóriakártya támogatás webhelyen lett közzétéve (https://onlinecamera.net) Címlap > Foscam kamera szett: FN3108XE-B4-1T - 4 x 1Mp, 1TB HDD, saját PoE
ONLINECAMERA - Nagy Látószög, WiFi, PoE, NVR, Infra, Memóriakártya támogatás webhelyen lett közzétéve (https://onlinecamera.net) Címlap > Foscam kamera szett: FN3108XE-B4-1T - 4 x 1Mp, 1TB HDD, saját PoE
Dunaújvárosi Főiskola Informatikai Intézet. Intelligens ágensek. Dr. Seebauer Márta. főiskolai tanár
 Dunaújvárosi Főiskola Informatikai Intézet Intelligens ágensek Dr. Seebauer Márta főiskolai tanár seebauer.marta@szgti.bmf.hu Ágens Ágens (agent) bármi lehet, amit úgy tekinthetünk, hogy érzékelők (sensors)
Dunaújvárosi Főiskola Informatikai Intézet Intelligens ágensek Dr. Seebauer Márta főiskolai tanár seebauer.marta@szgti.bmf.hu Ágens Ágens (agent) bármi lehet, amit úgy tekinthetünk, hogy érzékelők (sensors)
SZENZORFÚZIÓS ELJÁRÁSOK KIDOLGOZÁSA AUTONÓM JÁRMŰVEK PÁLYAKÖVETÉSÉRE ÉS IRÁNYÍTÁSÁRA
 infokommunikációs technológiák SZENZORFÚZIÓS ELJÁRÁSOK KIDOLGOZÁSA AUTONÓM JÁRMŰVEK PÁLYAKÖVETÉSÉRE ÉS IRÁNYÍTÁSÁRA BEVEZETŐ A KUTATÁS CÉLJA Autonóm járművek és robotok esetén elsődleges feladat a robotok
infokommunikációs technológiák SZENZORFÚZIÓS ELJÁRÁSOK KIDOLGOZÁSA AUTONÓM JÁRMŰVEK PÁLYAKÖVETÉSÉRE ÉS IRÁNYÍTÁSÁRA BEVEZETŐ A KUTATÁS CÉLJA Autonóm járművek és robotok esetén elsődleges feladat a robotok
Autóipari vezérlőegységek aktív környezetállósági tesztelésének módszerei
 Autóipari vezérlőegységek aktív környezetállósági tesztelésének módszerei Aradi Szilárd PhD témavezető: Dr. Gyenes Károly Közlekedés és járműirányítás workshop BME 2011 ISBN 978-963-420-975-1 Bevezetés
Autóipari vezérlőegységek aktív környezetállósági tesztelésének módszerei Aradi Szilárd PhD témavezető: Dr. Gyenes Károly Közlekedés és járműirányítás workshop BME 2011 ISBN 978-963-420-975-1 Bevezetés
Kísérleti üzemek az élelmiszeriparban alkalmazható fejlett gépgyártás-technológiai megoldások kifejlesztéséhez, kipróbálásához és oktatásához
 1 Nemzeti Workshop Kísérleti üzemek az élelmiszeriparban alkalmazható fejlett gépgyártás-technológiai megoldások kifejlesztéséhez, kipróbálásához és oktatásához Berczeli Attila Campden BRI Magyarország
1 Nemzeti Workshop Kísérleti üzemek az élelmiszeriparban alkalmazható fejlett gépgyártás-technológiai megoldások kifejlesztéséhez, kipróbálásához és oktatásához Berczeli Attila Campden BRI Magyarország
Kockázat alapú karbantartás kialakítása a TPM rendszerben
 Kockázat alapú karbantartás kialakítása a TPM rendszerben Előadásanyag Összeállította: Fekete Gábor A.A. Stádium Kft. 6723 Szeged, József Attila sgt. 130. Tel.: 62/431-927 aastadium@aastadium.hu www.aastadium.hu
Kockázat alapú karbantartás kialakítása a TPM rendszerben Előadásanyag Összeállította: Fekete Gábor A.A. Stádium Kft. 6723 Szeged, József Attila sgt. 130. Tel.: 62/431-927 aastadium@aastadium.hu www.aastadium.hu
Általános követelmények a kép tartalmával és minőségével kapcsolatban
 Általános követelmények a kép tartalmával és minőségével kapcsolatban A következő követelmények egyrészt azért fontosak, hogy megfelelően dokumentálják az eseményeket (bizonyítékként felhasználóak legyenek),
Általános követelmények a kép tartalmával és minőségével kapcsolatban A következő követelmények egyrészt azért fontosak, hogy megfelelően dokumentálják az eseményeket (bizonyítékként felhasználóak legyenek),
INTELLIGENS KÖZLEKEDÉSI RENDSZEREK. Dr. Tóth János 2015.11.18.
 INTELLIGENS KÖZLEKEDÉSI RENDSZEREK Dr. Tóth János 2015.11.18. Tartalom ITS definíció, EU direktíva Közúti információs és forgalombefolyásolási rendszerek csoportosítása Statikus és dinamikus rendszerek
INTELLIGENS KÖZLEKEDÉSI RENDSZEREK Dr. Tóth János 2015.11.18. Tartalom ITS definíció, EU direktíva Közúti információs és forgalombefolyásolási rendszerek csoportosítása Statikus és dinamikus rendszerek
Sensor Technologies Kft. TrafficNET (közlekedés-információs rendszer)
") TrafficNET (közlekedés-információs rendszer) 1 1. Projektcél A TrafficNet projekt célja olyan közlekedés-információs rendszer megvalósítása, amely Kecskeméten és vonzáskörzetében közlekedőket valósidejű
TrafficNET (közlekedés-információs rendszer) 1 1. Projektcél A TrafficNet projekt célja olyan közlekedés-információs rendszer megvalósítása, amely Kecskeméten és vonzáskörzetében közlekedőket valósidejű
Nagy bonyolultságú rendszerek fejlesztőeszközei
 Nagy bonyolultságú rendszerek fejlesztőeszközei Balogh András balogh@optxware.com A cég A BME spin-off-ja A Hibatűrő Rendszerek Kutatócsoport tagjai alapították Tisztán magánkézben Szakmai háttér Hibatűrő
Nagy bonyolultságú rendszerek fejlesztőeszközei Balogh András balogh@optxware.com A cég A BME spin-off-ja A Hibatűrő Rendszerek Kutatócsoport tagjai alapították Tisztán magánkézben Szakmai háttér Hibatűrő
Milyen kihívásokat kell a logisztikának kezelni, magas szinten megoldani a globalizált világban?
 1 fólia Milyen kihívásokat kell a logisztikának kezelni, magas szinten megoldani a globalizált világban? A termelés globalizációja következtében teljesen átalakul a termelő vállalatok struktúrálódása.
1 fólia Milyen kihívásokat kell a logisztikának kezelni, magas szinten megoldani a globalizált világban? A termelés globalizációja következtében teljesen átalakul a termelő vállalatok struktúrálódása.
Autós rejtett kamera a Mio-tól. Írta: Mio május 08. szerda, 08:32
 Az autós navigációk és fedélzeti kamerák vezető gyártója, a Mio örömmel mutatja be legújabb kameráit, a MiVue J sorozat tagjait. A diszkrét, kijelző nélküli design még jobb vezetési élményt nyújt: a kamera
Az autós navigációk és fedélzeti kamerák vezető gyártója, a Mio örömmel mutatja be legújabb kameráit, a MiVue J sorozat tagjait. A diszkrét, kijelző nélküli design még jobb vezetési élményt nyújt: a kamera
Járműinformatika Bevezetés
 Járműinformatika Bevezetés 2018/2019. tanév, II. félév Dr. Kovács Szilveszter E-mail: szkovacs@iit.uni-miskolc.hu Informatika Intézet 107/a. Tel: (46) 565-111 / 21-07 Autó elektronika az 1970-es években
Járműinformatika Bevezetés 2018/2019. tanév, II. félév Dr. Kovács Szilveszter E-mail: szkovacs@iit.uni-miskolc.hu Informatika Intézet 107/a. Tel: (46) 565-111 / 21-07 Autó elektronika az 1970-es években
GIS Open D GEOSOLUTIONS HUNGARY KFT Váradi Attila: Trimble SX10 Minden az EGYben PREMIER
 GIS Open 2017 3D GEOSOLUTIONS HUNGARY KFT Váradi Attila: Trimble SX10 Minden az EGYben PREMIER 3D Geosolutions Hungary Kft. 3D Geosolutions Hungary Kft. 3D Geosolutions Hungary Kft. Célkitűzésünk Trimble
GIS Open 2017 3D GEOSOLUTIONS HUNGARY KFT Váradi Attila: Trimble SX10 Minden az EGYben PREMIER 3D Geosolutions Hungary Kft. 3D Geosolutions Hungary Kft. 3D Geosolutions Hungary Kft. Célkitűzésünk Trimble
Mobil Térképező Rendszer hazai felhasználása
 1149 Budapest, Bosnyák tér 5. 1591 Budapest, Pf. 304. (1) 252-8222 Titkárság: (1) 363-6801 Fax: (1) 363-5808 Mobil Térképező Rendszer hazai felhasználása A lézerszkennerrel történő felmérés a legmodernebb
1149 Budapest, Bosnyák tér 5. 1591 Budapest, Pf. 304. (1) 252-8222 Titkárság: (1) 363-6801 Fax: (1) 363-5808 Mobil Térképező Rendszer hazai felhasználása A lézerszkennerrel történő felmérés a legmodernebb
VÁNDORGYŰLÉS július 6-8.
 MFTTT, 31. VÁNDORGYŰLÉS 2017. július 6-8. Az új technológiák és a szervezeti változások hatása a magyar földmérésre és térképészetre 3D GEOSOLUTIONS HUNGARY KFT Váradi Attila: Trimble SX10: az IGAZI FÚZIÓ!
MFTTT, 31. VÁNDORGYŰLÉS 2017. július 6-8. Az új technológiák és a szervezeti változások hatása a magyar földmérésre és térképészetre 3D GEOSOLUTIONS HUNGARY KFT Váradi Attila: Trimble SX10: az IGAZI FÚZIÓ!
Az elektromos mobilitás gazdasági jövőképe: a járműipar, a közlekedés, az energetika és a digitalizáció konvergenciája
 Az elektromos mobilitás gazdasági jövőképe: a járműipar, a közlekedés, az energetika és a digitalizáció konvergenciája Vígh Zoltán közkapcsolati igazgató, JÁK 2017. október 18. AZ E-MOBILITÁSI SZEKTOR
Az elektromos mobilitás gazdasági jövőképe: a járműipar, a közlekedés, az energetika és a digitalizáció konvergenciája Vígh Zoltán közkapcsolati igazgató, JÁK 2017. október 18. AZ E-MOBILITÁSI SZEKTOR
AUTONÓM JÁRMŰVEK A POLGÁRI JOGI FELELŐSSÉG ÉS A SZERZŐI JOG SZEMSZÖGÉBŐL
 AIDA XV. Budapest Biztosítási Kollokvium AUTONÓM JÁRMŰVEK A POLGÁRI JOGI FELELŐSSÉG ÉS A SZERZŐI JOG SZEMSZÖGÉBŐL Dr. Somkutas Péter IT ARCHITECT, JOGÁSZ AZ ÖNVEZETŐ AUTÓ ELSŐ ISMÉRVE: NEM VEZETI ÖNMAGÁT.
AIDA XV. Budapest Biztosítási Kollokvium AUTONÓM JÁRMŰVEK A POLGÁRI JOGI FELELŐSSÉG ÉS A SZERZŐI JOG SZEMSZÖGÉBŐL Dr. Somkutas Péter IT ARCHITECT, JOGÁSZ AZ ÖNVEZETŐ AUTÓ ELSŐ ISMÉRVE: NEM VEZETI ÖNMAGÁT.
VMD960 MB. Digitális video mozgásérzékelő Egycsatornás verzió. Jellemzői
 VMD960 MB Digitális video mozgásérzékelő Egycsatornás verzió Jellemzői Professzionális kültéri videó mozgásérzékelő Felbukkanó vagy eltűnő álló tárgyak detektálása Objektumszámlálás (ember, jármű) Rendkívül
VMD960 MB Digitális video mozgásérzékelő Egycsatornás verzió Jellemzői Professzionális kültéri videó mozgásérzékelő Felbukkanó vagy eltűnő álló tárgyak detektálása Objektumszámlálás (ember, jármű) Rendkívül
Szárazföldi autonóm mobil robotok vezérlőrendszerének kialakítási lehetőségei. Kucsera Péter ZMNE Doktorandusz
 Szárazföldi autonóm mobil robotok vezérlőrendszerének kialakítási lehetőségei. Kucsera Péter ZMNE Doktorandusz A mobil robot vezérlőrendszerének feladatai Elvégzendő feladat Kommunikáció Vezérlő rendszer
Szárazföldi autonóm mobil robotok vezérlőrendszerének kialakítási lehetőségei. Kucsera Péter ZMNE Doktorandusz A mobil robot vezérlőrendszerének feladatai Elvégzendő feladat Kommunikáció Vezérlő rendszer
3D - geometriai modellezés, alakzatrekonstrukció, nyomtatás
 3D - geometriai modellezés, alakzatrekonstrukció, nyomtatás 15. Digitális Alakzatrekonstrukció Méréstechnológia, Ponthalmazok regisztrációja http://cg.iit.bme.hu/portal/node/312 https://www.vik.bme.hu/kepzes/targyak/viiiav54
3D - geometriai modellezés, alakzatrekonstrukció, nyomtatás 15. Digitális Alakzatrekonstrukció Méréstechnológia, Ponthalmazok regisztrációja http://cg.iit.bme.hu/portal/node/312 https://www.vik.bme.hu/kepzes/targyak/viiiav54
Intelligens Rendszerek
 Intelligens Rendszerek Robotok http://mobil.nik.uni-obuda.hu http://mobil.nik.uni-obuda.hu/tantargyak/irg/segedanyagok/ B Biology Biológiai mintára készített, E Electronics elektronikusan működtetett,
Intelligens Rendszerek Robotok http://mobil.nik.uni-obuda.hu http://mobil.nik.uni-obuda.hu/tantargyak/irg/segedanyagok/ B Biology Biológiai mintára készített, E Electronics elektronikusan működtetett,
A Nemzeti Tengelysúlymérő (TSM) Rendszer kialakítása és működése
 Rendszer kialakítása és működése") A Nemzeti Tengelysúlymérő (TSM) Rendszer kialakítása és működése dr. Bertalan-Kürti Veronika projektvezető, főosztályvezető-helyettes Nemzeti Fejlesztési Minisztérium 2017. október 4. A TSM rendszer kialakításának
A Nemzeti Tengelysúlymérő (TSM) Rendszer kialakítása és működése dr. Bertalan-Kürti Veronika projektvezető, főosztályvezető-helyettes Nemzeti Fejlesztési Minisztérium 2017. október 4. A TSM rendszer kialakításának
Közlekedésbiztonsági attitűdök az intelligens közlekedési rendszerek tükrében
 Közlekedésbiztonsági attitűdök az intelligens közlekedési rendszerek tükrében KTI Közlekedéstudományi Intézet Nonprofit Kft. Közlekedésbiztonsági Kutatóközpont Pauer Gábor Intelligens közlekedési rendszerek,
Közlekedésbiztonsági attitűdök az intelligens közlekedési rendszerek tükrében KTI Közlekedéstudományi Intézet Nonprofit Kft. Közlekedésbiztonsági Kutatóközpont Pauer Gábor Intelligens közlekedési rendszerek,
Autonóm járművek városi közlekedésének kihívásai
 Autonóm járművek városi közlekedésének kihívásai Dr. Szalay Zsolt Dr. Schuchmann Gábor BME GJT, tanszékvezető egyetemi docens BME UVT, egyetemi docens 1 Kihívás Alkalmasság Jármű specifikációja Pályával
Autonóm járművek városi közlekedésének kihívásai Dr. Szalay Zsolt Dr. Schuchmann Gábor BME GJT, tanszékvezető egyetemi docens BME UVT, egyetemi docens 1 Kihívás Alkalmasság Jármű specifikációja Pályával
Vezető nélküli targoncák munkavédelmi kérdései Együtt működni! Péterffy Gábor Siófok,
 Együtt működni! Péterffy Gábor Siófok, 2018. 05. 18 Együtt működni! 1. Mi az az AGV? a. Megvezetés, tájékozódás b. Biztonsági berendezések, érzékelők. 2. A vezető nélküli targoncákra vonatkozó szabályok
Együtt működni! Péterffy Gábor Siófok, 2018. 05. 18 Együtt működni! 1. Mi az az AGV? a. Megvezetés, tájékozódás b. Biztonsági berendezések, érzékelők. 2. A vezető nélküli targoncákra vonatkozó szabályok
Szenzorcsatolt robot: A szenzorcsatolás lépései:
 1. Mi a szenzorcsatolt robot, hogyan épül fel? Ismertesse a szenzorcsatolás lépéseit röviden az Egységes szenzorplatform architektúra segítségével. Mikor beszélünk szenzorfúzióról? Milyen módszereket használhatunk?
1. Mi a szenzorcsatolt robot, hogyan épül fel? Ismertesse a szenzorcsatolás lépéseit röviden az Egységes szenzorplatform architektúra segítségével. Mikor beszélünk szenzorfúzióról? Milyen módszereket használhatunk?
Canon biztonsági kamerák összefoglaló 2014 SZEPTEMBER
 Canon biztonsági kamerák összefoglaló 2014 SZEPTEMBER Full HD termékválaszték PTZ IP66 DÓM FIXED BOX MINI DÓM VB-H41/B 60.4 látómező 20x optikai zoom Full HD (1920x1080) Rossz fényviszony: Színes 0.4lux
Canon biztonsági kamerák összefoglaló 2014 SZEPTEMBER Full HD termékválaszték PTZ IP66 DÓM FIXED BOX MINI DÓM VB-H41/B 60.4 látómező 20x optikai zoom Full HD (1920x1080) Rossz fényviszony: Színes 0.4lux
Az autonóm és elektromos járművek aktuális műszaki kérdései Szauter Ferenc. Tata,
 Az autonóm és elektromos járművek aktuális műszaki kérdései Szauter Ferenc Tata, 2016.12.01-02. Hibrid? HYBRID? NA DE MINEK!? 2 Hibrid? HYBRID? NA DE MINEK!? 3 Presenter: Előadó: Szauter Dr. Katalin Ferenc
Az autonóm és elektromos járművek aktuális műszaki kérdései Szauter Ferenc Tata, 2016.12.01-02. Hibrid? HYBRID? NA DE MINEK!? 2 Hibrid? HYBRID? NA DE MINEK!? 3 Presenter: Előadó: Szauter Dr. Katalin Ferenc
LEAN 4.0 azaz hogyan tudja a Lean menedzsment az Ipar 4.0-át támogatni és lehetőségeit kiaknázni.
 XXV. NEMZETI MINŐSÉGÜGYI KONFERENCIA LEAN 4.0 azaz hogyan tudja a Lean menedzsment az Ipar 4.0-át támogatni és lehetőségeit kiaknázni. Dr. Németh Balázs Kvalikon Kft. 2018. Szeptember 14. Termelő vállalat
XXV. NEMZETI MINŐSÉGÜGYI KONFERENCIA LEAN 4.0 azaz hogyan tudja a Lean menedzsment az Ipar 4.0-át támogatni és lehetőségeit kiaknázni. Dr. Németh Balázs Kvalikon Kft. 2018. Szeptember 14. Termelő vállalat
Informatika a valós világban: a számítógépek és környezetünk kapcsolódási lehetőségei
 Informatika a valós világban: a számítógépek és környezetünk kapcsolódási lehetőségei Dr. Gingl Zoltán SZTE, Kísérleti Fizikai Tanszék Szeged, 2000 Február e-mail : gingl@physx.u-szeged.hu 1 Az ember kapcsolata
Informatika a valós világban: a számítógépek és környezetünk kapcsolódási lehetőségei Dr. Gingl Zoltán SZTE, Kísérleti Fizikai Tanszék Szeged, 2000 Február e-mail : gingl@physx.u-szeged.hu 1 Az ember kapcsolata
Rendszám felismerő rendszer általános működési leírás
 Rendszám felismerő rendszer általános működési leírás Creativ Bartex Solution Kft. 2009. A rendszer funkciója A rendszer fő funkciója elsősorban parkolóházak gépkocsiforgalmának, ki és beléptetésének kényelmesebbé
Rendszám felismerő rendszer általános működési leírás Creativ Bartex Solution Kft. 2009. A rendszer funkciója A rendszer fő funkciója elsősorban parkolóházak gépkocsiforgalmának, ki és beléptetésének kényelmesebbé
Az irányítástechnika alapfogalmai. 2008.02.15. Irányítástechnika MI BSc 1
 Az irányítástechnika alapfogalmai 2008.02.15. 1 Irányítás fogalma irányítástechnika: önműködő irányítás törvényeivel és gyakorlati megvalósításával foglakozó műszaki tudomány irányítás: olyan művelet,
Az irányítástechnika alapfogalmai 2008.02.15. 1 Irányítás fogalma irányítástechnika: önműködő irányítás törvényeivel és gyakorlati megvalósításával foglakozó műszaki tudomány irányítás: olyan művelet,
Dr. FEHÉR PÉTER Magyarországi szervezetek digitális transzformációja számokban - Tények és 1trendek
 Dr. FEHÉR PÉTER Magyarországi szervezetek digitális transzformációja számokban - Tények és 1trendek 2 Változás sebessége A gazdasági átalakulás nehezen követi a technológiai fejlődést Technológiai változás
Dr. FEHÉR PÉTER Magyarországi szervezetek digitális transzformációja számokban - Tények és 1trendek 2 Változás sebessége A gazdasági átalakulás nehezen követi a technológiai fejlődést Technológiai változás
Ragasztócsík ellenőrző kamerás rendszer
 Ragasztócsík ellenőrző kamerás rendszer / Esettanulmány egy új fejlesztésű, flexibilis, felhasználóbarát betanítási rendszerről./ A papírdobozok gyártása során elengedhetetlen, hogy a ragasztás jó minőségű
Ragasztócsík ellenőrző kamerás rendszer / Esettanulmány egy új fejlesztésű, flexibilis, felhasználóbarát betanítási rendszerről./ A papírdobozok gyártása során elengedhetetlen, hogy a ragasztás jó minőségű
Ember és robot együttműködése a gyártásban Ipar 4.0
 Helyszín: MTA Székház, Felolvasóterem Időpont: 2017. November 7. Ember és robot együttműködése a gyártásban Ipar 4.0 Dr. Erdős Ferenc Gábor MTA SZTAKI Fejlett robotika ígérete A fejlett robotika és az
Helyszín: MTA Székház, Felolvasóterem Időpont: 2017. November 7. Ember és robot együttműködése a gyártásban Ipar 4.0 Dr. Erdős Ferenc Gábor MTA SZTAKI Fejlett robotika ígérete A fejlett robotika és az
Megoldások a tehergépjárműpihenők parkolóhely előrejelző rendszereire
 Megoldások a tehergépjárműpihenők parkolóhely előrejelző rendszereire Sándor Zsolt zsolt.sandor@mail.bme.hu Budapesti Műszaki és Gazdaságtudományi Egyetem Közlekedésmérnöki és Járműmérnöki Kar Közlekedésüzemi
Megoldások a tehergépjárműpihenők parkolóhely előrejelző rendszereire Sándor Zsolt zsolt.sandor@mail.bme.hu Budapesti Műszaki és Gazdaságtudományi Egyetem Közlekedésmérnöki és Járműmérnöki Kar Közlekedésüzemi
Gyakorlatok. VITMMA09 Okos város MSc mellékspecializáció
 Gyakorlatok VITMMA09 Okos város MSc mellékspecializáció ITS gyakorlatok Cél Gyakorlati tudással kiegészíteni az elméleti ismereteket Példák a való világból, korlátozott de valósághű környezetben Tervezés,
Gyakorlatok VITMMA09 Okos város MSc mellékspecializáció ITS gyakorlatok Cél Gyakorlati tudással kiegészíteni az elméleti ismereteket Példák a való világból, korlátozott de valósághű környezetben Tervezés,
Az ALPINION Crystal Signature technológia a mély struktúrák részletes képeivel növeli a klinikai pontosságot és hatékonyságot.
 Az ALPINION E-CUBE sorozat megváltoztatja a diagnosztikai ultrahang területét, egyedi és megbízható technológiai áttörései révén maximális eredményességet tesz lehetővé. Az E-CUBE 9 az integrált ALPINION
Az ALPINION E-CUBE sorozat megváltoztatja a diagnosztikai ultrahang területét, egyedi és megbízható technológiai áttörései révén maximális eredményességet tesz lehetővé. Az E-CUBE 9 az integrált ALPINION
HASZNÁLATI ÚTMUTATÓ. Gyártó: Steelmate Co., Ltd.
 HASZNÁLATI ÚTMUTATÓ Gyártó: Steelmate Co., Ltd. Fontos figyelmeztetés A parkolást segítő rendszer arra készült, hogy segítséget nyújtson a tolatásban. Nem helyettesíti a vezetőnek a tolatáskor általában
HASZNÁLATI ÚTMUTATÓ Gyártó: Steelmate Co., Ltd. Fontos figyelmeztetés A parkolást segítő rendszer arra készült, hogy segítséget nyújtson a tolatásban. Nem helyettesíti a vezetőnek a tolatáskor általában
Kooperatív Intelligens Közlekedés Rendszerek építőelemei
 Kooperatív Intelligens Közlekedés Rendszerek építőelemei ITS Hungary Workshop 2016. November 24. Váradi András, Commsignia Bemutatkozás V2X Szoftver Stack V2X Hardverek V2X Security Applikációk Hybrid
Kooperatív Intelligens Közlekedés Rendszerek építőelemei ITS Hungary Workshop 2016. November 24. Váradi András, Commsignia Bemutatkozás V2X Szoftver Stack V2X Hardverek V2X Security Applikációk Hybrid
TM-87235 Közlekedési lámpa vezérlő
 TM-87235 Közlekedési lámpa vezérlő Használati útmutató 2011 BioDigit Ltd. Minden jog fenntartva. A dokumentum sokszorosítása, tartalmának közzététele bármilyen formában, beleértve az elektronikai és mechanikai
TM-87235 Közlekedési lámpa vezérlő Használati útmutató 2011 BioDigit Ltd. Minden jog fenntartva. A dokumentum sokszorosítása, tartalmának közzététele bármilyen formában, beleértve az elektronikai és mechanikai
Gép és ember, várható jövő
 Gép és ember, várható jövő Dr. Erb Szilvia Ügyvezető KTI Közlekedéstudományi Intézet Nonprofit Kft. Szervezeti értékei, amelyek meghatározzák a jövőképünket Európa vezető mobilitási kutató, fejlesztő és
Gép és ember, várható jövő Dr. Erb Szilvia Ügyvezető KTI Közlekedéstudományi Intézet Nonprofit Kft. Szervezeti értékei, amelyek meghatározzák a jövőképünket Európa vezető mobilitási kutató, fejlesztő és
Autonóm jármű forgalomszimulátorba illesztése
 Autonóm jármű forgalomszimulátorba illesztése Szalai Mátyás 2018 Konzulens: Dr. Tettamanti Tamás A szimulációs feladat Miért hasznos? Biztonságos környezetben nyújt lehetőséget az autonóm járművek forgalmi
Autonóm jármű forgalomszimulátorba illesztése Szalai Mátyás 2018 Konzulens: Dr. Tettamanti Tamás A szimulációs feladat Miért hasznos? Biztonságos környezetben nyújt lehetőséget az autonóm járművek forgalmi
Korszerű és gazdaságos felszíni parkolási módszer beruházásának és üzemeltetésének tapasztalatai
 Korszerű és gazdaságos felszíni parkolási módszer beruházásának és üzemeltetésének tapasztalatai TÓTH TIBOR Szentendrei Közös Önkormányzati Hivatal 1 Parkolási problémák Parkolóhelyek keresése 30% Torlódás
Korszerű és gazdaságos felszíni parkolási módszer beruházásának és üzemeltetésének tapasztalatai TÓTH TIBOR Szentendrei Közös Önkormányzati Hivatal 1 Parkolási problémák Parkolóhelyek keresése 30% Torlódás
Mesterséges intelligencia az önvezető autók világában. Takács Árpád. arpad.takacs@adasworks.com
 Mesterséges intelligencia az önvezető autók világában Takács Árpád arpad.takacs@adasworks.com I. Commsignia BME HIT autonóm járműtechnológiák workshop, Budapest, 2016. május 11. Rólunk Automatizált vezetés
Mesterséges intelligencia az önvezető autók világában Takács Árpád arpad.takacs@adasworks.com I. Commsignia BME HIT autonóm járműtechnológiák workshop, Budapest, 2016. május 11. Rólunk Automatizált vezetés
Kitekintés a jövőbe: új technológiák és modellek a fogyatékkal élők szolgálatában
 : új technológiák és modellek a fogyatékkal élők szolgálatában Fókuszban a MOBIX - az integrált, multi-platform támogatású, biztonságos videó kommunikációs és üzenetküldő platform Antal.Kuthy@egroup.hu
: új technológiák és modellek a fogyatékkal élők szolgálatában Fókuszban a MOBIX - az integrált, multi-platform támogatású, biztonságos videó kommunikációs és üzenetküldő platform Antal.Kuthy@egroup.hu
ÉRZÉKELŐK ÉS BEAVATKOZÓK II. PÉLDÁK - FELADATOK
 ÉRZÉKELŐK ÉS BEAVATKOZÓK II. PÉLDÁK - FELADATOK Dr. Soumelidis Alexandros 2019.02.06. BME KÖZLEKEDÉSMÉRNÖKI ÉS JÁRMŰMÉRNÖKI KAR 32708-2/2017/INTFIN SZÁMÚ EMMI ÁLTAL TÁMOGATOTT TANANYAG Ball & Plate kísérlet
ÉRZÉKELŐK ÉS BEAVATKOZÓK II. PÉLDÁK - FELADATOK Dr. Soumelidis Alexandros 2019.02.06. BME KÖZLEKEDÉSMÉRNÖKI ÉS JÁRMŰMÉRNÖKI KAR 32708-2/2017/INTFIN SZÁMÚ EMMI ÁLTAL TÁMOGATOTT TANANYAG Ball & Plate kísérlet
A felelősség határai a tudásalapú társadalomban a közlekedés példáján. Palkovics László BME
 A felelősség határai a tudásalapú társadalomban a közlekedés példáján Palkovics László BME Az autonóm közúti közlekedési rendszerek (jármű + közlekedési környezet) fejlődésének indokai a humán vezető képességei
A felelősség határai a tudásalapú társadalomban a közlekedés példáján Palkovics László BME Az autonóm közúti közlekedési rendszerek (jármű + közlekedési környezet) fejlődésének indokai a humán vezető képességei
Robotika. Relatív helymeghatározás Odometria
 Robotika Relatív helymeghatározás Odometria Differenciális hajtás c m =πd n /nc e c m D n C e n = hány mm-t tesz meg a robot egy jeladó impulzusra = névleges kerék átmérő = jeladó fölbontása (impulzus/ford.)
Robotika Relatív helymeghatározás Odometria Differenciális hajtás c m =πd n /nc e c m D n C e n = hány mm-t tesz meg a robot egy jeladó impulzusra = névleges kerék átmérő = jeladó fölbontása (impulzus/ford.)
Procontrol RFP-3. Műszaki adatlap. Rádiótransceiver / kontroller 433 vagy 868 MHz-re, felcsavarható SMA gumiantennával. Verzió: 4.1 2007.12.
 Procontrol RFP-3 Rádiótransceiver / kontroller 433 vagy 868 MHz-re, felcsavarható SMA gumiantennával Műszaki adatlap Verzió: 4.1 2007.12.21 1/6 Tartalomjegyzék RFP-3... 3 Rádiótransceiver / kontroller
Procontrol RFP-3 Rádiótransceiver / kontroller 433 vagy 868 MHz-re, felcsavarható SMA gumiantennával Műszaki adatlap Verzió: 4.1 2007.12.21 1/6 Tartalomjegyzék RFP-3... 3 Rádiótransceiver / kontroller
Évszakváltás a közlekedésben
 Évszakváltás a közlekedésben A közlekedésben a téli időszak tudatos felkészülést igényel. Megváltoznak az út- és látási viszonyok, amelyekhez a gyalogosoknak és a járművezetőknek egyaránt alkalmazkodniuk
Évszakváltás a közlekedésben A közlekedésben a téli időszak tudatos felkészülést igényel. Megváltoznak az út- és látási viszonyok, amelyekhez a gyalogosoknak és a járművezetőknek egyaránt alkalmazkodniuk
Magyar Közút ITS projektek 2020-ig Tomaschek Tamás Attila Verdes Máté
 Magyar Közút ITS projektek 2020-ig Tomaschek Tamás Attila Verdes Máté I. Magyar Közlekedési Konferencia Eger, 2017. október 18-20. A közeljövő kihívásai Változó felhasználói szokások, és igények Új kommunikációs
Magyar Közút ITS projektek 2020-ig Tomaschek Tamás Attila Verdes Máté I. Magyar Közlekedési Konferencia Eger, 2017. október 18-20. A közeljövő kihívásai Változó felhasználói szokások, és igények Új kommunikációs
hivatalos árlista CT 200h Érvényes: augusztus 23-tól visszavonásig
 hivatalos árlista CT 200h Érvényes: 2017. augusztus 23-tól visszavonásig CT 200h elegance SFX: 17 LISTAÁR: 9 000 000 Ft KEDVEZMÉNYES ÁR: 7 900 000 Ft ÁRELŐNY: 1 100 000 Ft Tempomat Halogén fényszóró Intelligens
hivatalos árlista CT 200h Érvényes: 2017. augusztus 23-tól visszavonásig CT 200h elegance SFX: 17 LISTAÁR: 9 000 000 Ft KEDVEZMÉNYES ÁR: 7 900 000 Ft ÁRELŐNY: 1 100 000 Ft Tempomat Halogén fényszóró Intelligens
BIG DATA ELEMZÉSEK LEHETŐSÉGEI
 BIG DATA ELEMZÉSEK LEHETŐSÉGEI A KÖRNYEZETVÉDELMI MODELLEZÉSBEN Dr. Torma A. 2015.11.13. 2015/11/13 Dr. TORMA A. >> Széchenyi István Egyetem 2 Tartalom 1. A Big Data fogalma 2. Pár érdekes adat a Big Data
BIG DATA ELEMZÉSEK LEHETŐSÉGEI A KÖRNYEZETVÉDELMI MODELLEZÉSBEN Dr. Torma A. 2015.11.13. 2015/11/13 Dr. TORMA A. >> Széchenyi István Egyetem 2 Tartalom 1. A Big Data fogalma 2. Pár érdekes adat a Big Data
Verifikáció és validáció Általános bevezető
 Verifikáció és validáció Általános bevezető Általános Verifikáció és validáció verification and validation - V&V: ellenőrző és elemző folyamatok amelyek biztosítják, hogy a szoftver megfelel a specifikációjának
Verifikáció és validáció Általános bevezető Általános Verifikáció és validáció verification and validation - V&V: ellenőrző és elemző folyamatok amelyek biztosítják, hogy a szoftver megfelel a specifikációjának
A JÖVŐ KÖZLEKEDÉSÉNEK FEJLŐDÉSI IRÁNYAI. trendek és feltételezések
 A JÖVŐ KÖZLEKEDÉSÉNEK FEJLŐDÉSI IRÁNYAI trendek és feltételezések ELJUTNI A-BÓL B-BE. ELJUTNI A-BÓL B-BE Legkényelmesebb mégiscsak az autó, ez háztól-házig visz Kedvezőtlen társadalmi hatások és mindenféle
A JÖVŐ KÖZLEKEDÉSÉNEK FEJLŐDÉSI IRÁNYAI trendek és feltételezések ELJUTNI A-BÓL B-BE. ELJUTNI A-BÓL B-BE Legkényelmesebb mégiscsak az autó, ez háztól-házig visz Kedvezőtlen társadalmi hatások és mindenféle
Főbb jellemzők ADATLAP ILD-310E-BL TÍPUSÚ HÁLÓZATI CSŐKAMERA FEDÉLZETI INTELLIGENCIÁVAL 75 IR LED* IR-megvilágítás 110 méterig
 Főbb jellemzők 75 IR LED* IR-megvilágítás 110 méterig Infrafényerő-szabályozás 1,3 MPix WDR szenzor Sávszélesség-menedzsment Pre- és post-alarm Kamerariasztási állapot kiváltása Detektorok rangsorolása
Főbb jellemzők 75 IR LED* IR-megvilágítás 110 méterig Infrafényerő-szabályozás 1,3 MPix WDR szenzor Sávszélesség-menedzsment Pre- és post-alarm Kamerariasztási állapot kiváltása Detektorok rangsorolása
Interferencia jelenségek a BME permanens állomásán
 Interferencia jelenségek a BME permanens állomásán Takács Bence, egyetemi docens takacs.bence@epito.bme.hu Rédey szeminárium 2017. március 3. Nagy teljesítményű blokkolók hatótávolság : 200 km adó teljesítmény
Interferencia jelenségek a BME permanens állomásán Takács Bence, egyetemi docens takacs.bence@epito.bme.hu Rédey szeminárium 2017. március 3. Nagy teljesítményű blokkolók hatótávolság : 200 km adó teljesítmény
TÉRINFORMATIKA ÉS INTELLIGENS KÖZLEKEDÉSI RENDSZEREK FEJLESZTÉSE A FŐVÁROS KÖZÚTHÁLÓZATÁN
 1 TÉRINFORMATIKA ÉS INTELLIGENS KÖZLEKEDÉSI RENDSZEREK FEJLESZTÉSE A FŐVÁROS KÖZÚTHÁLÓZATÁN Dr. Almássy Kornél BKK Közút Zrt. OKOS JÖVŐ KONFERENCIA / SMART FUTURE FORUM - GYŐR 2015. október 1-2. KARESZ
1 TÉRINFORMATIKA ÉS INTELLIGENS KÖZLEKEDÉSI RENDSZEREK FEJLESZTÉSE A FŐVÁROS KÖZÚTHÁLÓZATÁN Dr. Almássy Kornél BKK Közút Zrt. OKOS JÖVŐ KONFERENCIA / SMART FUTURE FORUM - GYŐR 2015. október 1-2. KARESZ
Bokor József, Palkovics László. Intelligens járművek. A fedélzeti irányítórendszerektől a teljes autonómiáig
 Bokor József, Palkovics László Intelligens járművek A fedélzeti irányítórendszerektől a teljes autonómiáig 2 Motiváció - miért fontos megoldás az automatizált közúti jármű irányítás? 3 Quelle: dpa Foto:
Bokor József, Palkovics László Intelligens járművek A fedélzeti irányítórendszerektől a teljes autonómiáig 2 Motiváció - miért fontos megoldás az automatizált közúti jármű irányítás? 3 Quelle: dpa Foto:
BUDAPESTI MŰSZAKI ÉS GAZDASÁGTUDOMÁNYI EGYETEM KÖZLEKEDÉSÜZEMI ÉS KÖZLEKEDÉSGAZDASÁGI TANSZÉK
 BUDAPESTI MŰSZAKI ÉS GAZDASÁGTUDOMÁNYI EGYETEM KÖZLEKEDÉSÜZEMI ÉS KÖZLEKEDÉSGAZDASÁGI TANSZÉK TDK TÉMAJAVASLATOK KÖZÚTI FORGALOMTECHNIKA ÉS KÖZLEKEDÉSBIZTONSÁG: 1. Kerékpáros forgalom útkereszteződésekben
BUDAPESTI MŰSZAKI ÉS GAZDASÁGTUDOMÁNYI EGYETEM KÖZLEKEDÉSÜZEMI ÉS KÖZLEKEDÉSGAZDASÁGI TANSZÉK TDK TÉMAJAVASLATOK KÖZÚTI FORGALOMTECHNIKA ÉS KÖZLEKEDÉSBIZTONSÁG: 1. Kerékpáros forgalom útkereszteződésekben
A LEGFINOMABBAN MŰKÖDŐ HIBRID
 AZ ÚJ HYBRID 2 A LEGFINOMABBAN MŰKÖDŐ HIBRID HIBRID Az új Camry Hybrid hatásosan elegyíti a kifogástalan minőségű limuzin kifinomult eleganciáját és az új generációs hibrid kimagasló teljesítményét. Gyönyörű
AZ ÚJ HYBRID 2 A LEGFINOMABBAN MŰKÖDŐ HIBRID HIBRID Az új Camry Hybrid hatásosan elegyíti a kifogástalan minőségű limuzin kifinomult eleganciáját és az új generációs hibrid kimagasló teljesítményét. Gyönyörű
3D számítógépes geometria és alakzatrekonstrukció
 3D számítógépes geometria és alakzatrekonstrukció 15. Digitális Alakzatrekonstrukció Méréstechnológia, Ponthalmazok regisztrációja http://cg.iit.bme.hu/portal/node/312 https://www.vik.bme.hu/kepzes/targyak/viiima01
3D számítógépes geometria és alakzatrekonstrukció 15. Digitális Alakzatrekonstrukció Méréstechnológia, Ponthalmazok regisztrációja http://cg.iit.bme.hu/portal/node/312 https://www.vik.bme.hu/kepzes/targyak/viiima01
ÉRZÉKELŐK ÉS BEAVATKOZÓK I. 0. TANTÁRGY ISMERTETŐ
 ÉRZÉKELŐK ÉS BEAVATKOZÓK I. 0. TANTÁRGY ISMERTETŐ Dr. Soumelidis Alexandros 2018.09.06. BME KÖZLEKEDÉSMÉRNÖKI ÉS JÁRMŰMÉRNÖKI KAR 32708-2/2017/INTFIN SZÁMÚ EMMI ÁLTAL TÁMOGATOTT TANANYAG A tárgy célja
ÉRZÉKELŐK ÉS BEAVATKOZÓK I. 0. TANTÁRGY ISMERTETŐ Dr. Soumelidis Alexandros 2018.09.06. BME KÖZLEKEDÉSMÉRNÖKI ÉS JÁRMŰMÉRNÖKI KAR 32708-2/2017/INTFIN SZÁMÚ EMMI ÁLTAL TÁMOGATOTT TANANYAG A tárgy célja
Sztereó kamerarendszerre alapozott gyalogos felismerés Kornis János*, Szabó Zsolt**
 Sztereó kamerarendszerre alapozott gyalogos felismerés Kornis János*, Szabó Zsolt** *PhD, okleveles villamosmérnök, Budapesti Műszaki és Gazdaságtudományi Egyetem Fizika Tanszék, kornis@phy.bme.hu **fizikus
Sztereó kamerarendszerre alapozott gyalogos felismerés Kornis János*, Szabó Zsolt** *PhD, okleveles villamosmérnök, Budapesti Műszaki és Gazdaságtudományi Egyetem Fizika Tanszék, kornis@phy.bme.hu **fizikus
Magyar Közút ITS projektek 2020-ig
 Magyar Közút ITS projektek 2020-ig Verdes Máté ITS Hungary évzáró rendezvény Makadám Klub, 2017. december 18. A közeljövő kihívásai Változó felhasználói szokások, és igények Új kommunikációs csatornák,
Magyar Közút ITS projektek 2020-ig Verdes Máté ITS Hungary évzáró rendezvény Makadám Klub, 2017. december 18. A közeljövő kihívásai Változó felhasználói szokások, és igények Új kommunikációs csatornák,
A mindenható automatizálás Az informatikai társadalom
 Intelligens robotkéz, mely szállító járművön nyit ajtót A mindenható automatizálás Az informatikai társadalom 2. rész Az elmúlt évek izmosodó folyamata a gépkocsikon alkalmazott érzékelés- és irányítástechnika
Intelligens robotkéz, mely szállító járművön nyit ajtót A mindenható automatizálás Az informatikai társadalom 2. rész Az elmúlt évek izmosodó folyamata a gépkocsikon alkalmazott érzékelés- és irányítástechnika
3D számítógépes geometria és alakzatrekonstrukció
 3D számítógépes geometria és alakzatrekonstrukció 14. Digitális Alakzatrekonstrukció - Bevezetés http://cg.iit.bme.hu/portal/node/312 https://www.vik.bme.hu/kepzes/targyak/viiima01 Dr. Várady Tamás, Dr.
3D számítógépes geometria és alakzatrekonstrukció 14. Digitális Alakzatrekonstrukció - Bevezetés http://cg.iit.bme.hu/portal/node/312 https://www.vik.bme.hu/kepzes/targyak/viiima01 Dr. Várady Tamás, Dr.
Használati útmutató. PNI P05 parkolássegítő érzékelő, tükrös kijelzővel (PNI-P05)
") Használati útmutató PNI P05 parkolássegítő érzékelő, tükrös kijelzővel (PNI-P05) 1 Tartalomjegyzék Bevezetés... 3 Főbb tulajdonságok......3 Szenzorok beszerelése... 3 Kapcsolási rajz......4 Műszaki adatok......5
Használati útmutató PNI P05 parkolássegítő érzékelő, tükrös kijelzővel (PNI-P05) 1 Tartalomjegyzék Bevezetés... 3 Főbb tulajdonságok......3 Szenzorok beszerelése... 3 Kapcsolási rajz......4 Műszaki adatok......5
Győr, az elektromos autók mintavárosa
 Hibrid és elektromos járművek fejlesztését megalapozó kutatások TÁMOP-4.2.2.A-11/1/KONV- 2012-0012 Smarter Transport Kooperatív közlekedési rendszerek infokommunikációs támogatása TÁMOP-4.2.2.C-11/1/KONV-
Hibrid és elektromos járművek fejlesztését megalapozó kutatások TÁMOP-4.2.2.A-11/1/KONV- 2012-0012 Smarter Transport Kooperatív közlekedési rendszerek infokommunikációs támogatása TÁMOP-4.2.2.C-11/1/KONV-