SZENZORFÚZIÓS ELJÁRÁSOK KIDOLGOZÁSA AUTONÓM JÁRMŰVEK PÁLYAKÖVETÉSÉRE ÉS IRÁNYÍTÁSÁRA
|
|
|
- Teréz Ballané
- 8 évvel ezelőtt
- Látták:
Átírás
1 infokommunikációs technológiák SZENZORFÚZIÓS ELJÁRÁSOK KIDOLGOZÁSA AUTONÓM JÁRMŰVEK PÁLYAKÖVETÉSÉRE ÉS IRÁNYÍTÁSÁRA

2 BEVEZETŐ A KUTATÁS CÉLJA Autonóm járművek és robotok esetén elsődleges feladat a robotok helyzetének meghatározása és követése. Csak a robotra szerelt érzékelőkön alapuló lokalizációs módszerek (inerciális mérőegységek és kerékelfordulást mérő érzékelők) esetén jelentős mérési hibákra számíthatunk, ezért önmagukban alkalmatlanok a pozíciómérésre, helymeghatározásra. Épületen belül használt robotok esetén ilyen külső lokalizáló rendszerként szóba jöhet rádiójel vagy ultrahang alapú pozíciómérés. A kutatási munka során a robot lokalizációját ultrahang alapú távolságméréssel valamint inerciális szenzorok jelei alapján valósítjuk meg. Kálmán szűrő alapú szenzorfúziós eljárásokat dolgozunk ki a minél gyorsabb és pontosabb lokalizációra. Megoldjuk az ultrahangos rendszer optimális elhelyezésének a feladatát, automatikus kalibrálását. A kidolgozott lokalizációs rendszerünk hatékonyságát autonóm robotirányítási feladatokon keresztül demonstráljuk. 2

3 BEVEZETŐ A KUTATÓCSOPORT A kutatócsoport tagjai: Márton Lőrinc, Docens, Sapientia Erdélyi Magyar Tudományegyetem Feladatok: Algoritmusfejlesztés Szimulációs vizsgálatok Mérések, mérések feldolgozása Publikációk írása Nagy Csaba, MSc hallgató, Sapientia Erdélyi Magyar Tudományegyetem Bíró Zalán, MSc hallgató, Sapientia Erdélyi Magyar Tudományegyetem Feladatok: Hardver- és szoftverfejlesztés Szimulációs környezet kidolgozása Mérések, mérések feldolgozása 3

4 BEVEZETŐ KUTATÁSI FELADATOK RÉSZLETEZÉSE 2014 Augusztus December 31 Márton Lőrinc 2014 augusztus-oktober Kálmán szűrő, kiterjesztett Kálmán szűrő elméletének feldolgozása Particle Filter, Unscented Kalman Filter elméletének feldolgozása A Kálmán szűrő alapú szenzorfúzió kidolgozása Márton Lőrinc 2014 november-december Lineáris Kálmán szűrőn alapuló robot lokalizációs mérések Konferencia cikk írása Kiterjesztett Kálmán szűrőn alapuló robot lokalizációs mérések Nagy Csaba 2014 augusztus-oktober Ultrahangos jeladó eszköz hardver fejlesztése Beágyazott rendszer alapú ultrahangos vevő eszköz hardver fejlesztése Ultrahangos távolságmérő szoftver fejlesztése, kommunikáció megvalósítása a lokalizációt végző rendszerelemek között Nagy Csaba 2014 november-december Számítógépes szoftver fejlesztése robot lokalizációra A lokalizációs rendszer automatikus kalibrációjának kidolgozása és megvalósítása Az ultrahangos vevők optimális térbeli elhelyezésének kidolgozása és megvalósítása Bíró Zalán 2014 augusztus-oktober Inerciális szenzor jeleit feldolgozó beágyazott rendszer hardver fejlesztése A szenzor jeleinek beolvasásra alkalmas szoftver fejlesztése Szenzor jelek mérési arhitekturájának tesztelése, mérések Bíró Zalán 2014 november-december Szimulációs szoftver a lineáris Kálmán szűrő teszteléséhez A lineáris Kálmán szűrő valós idejű megvalósítása A kiterjesztett Kálmán szűrő szimulációja 4

5 KUTATÁSI EREDMÉNYEK - HARDVERFEJLESZTÉS A rendszer tömbrajza Az ultrahangos adók a mester számítógéppel R485 buszon kommunikálnak A mester számítógép a felelős a robot pozíciójának meghatározásáért A megkapott pozíciót vezeték nélküli hálózaton elküldi a robothoz Az adó-vevő távolságmérés elve A mérések szinkronizációját egy infravőrős jeladóval végezzük, szinkronizációt a mester számítógép kezdeményezi Fázismodulált jelet alkalmazunk a pontos távolságméréshez, vevő oldalon a fázisváltozást detektáljuk. Mérési frekvencia ms 5


6 KUTATÁSI EREDMÉNYEK - HARDVERFEJLESZTÉS Az ultrahangos adó Az ultrahangos vevő 6

 - Magnetométer Orientációmérés (3 tengely) - Giroszkóp Szögsebességmérés")
7 KUTATÁSI EREDMÉNYEK HARDVERFEJLESZTÉS Az inerciális szenzor - Mérési frekvencia - 10 ms - Gyorsulásmérés (3 tengelyen) - Magnetométer Orientációmérés (3 tengely) - Giroszkóp Szögsebességmérés (3 tengely) 7
 - Giroszkóp")

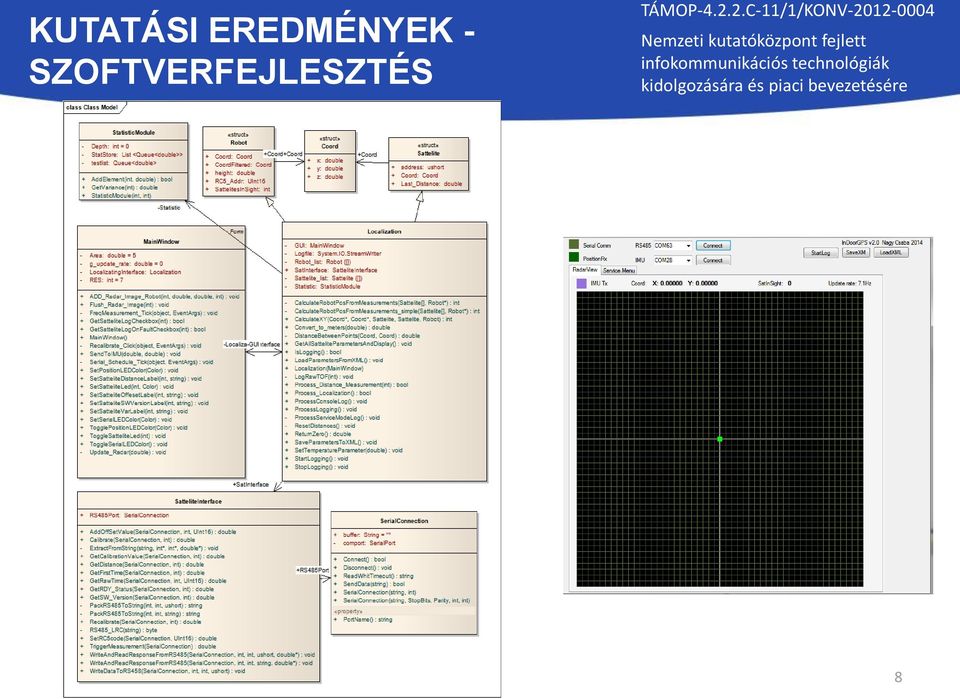
8 KUTATÁSI EREDMÉNYEK - SZOFTVERFEJLESZTÉS 8
9 KUTATÁSI EREDMÉNYEK ULTRAHANGOS TÁVOLSÁGMÉRÉS Egy nemlineáris egyenletrendszert kell megoldani (min. 2 egyenlet szükséges síkbeli pozíció meghatározáshoz) Ha az egyik ultrahangos vevő az origó fölött van, explicit megoldás: 9


10 KUTATÁSI EREDMÉNYEK AZ UH. VEVŐK POZÍCIÓJÁNAK KALIBRÁLÁSA Megvizsgáltuk, hogy az ultrahangos vevők térbeli pozíciója pontosságának ismerete hogyan befolyásolja a lokalizációs számításokat. Eredmény: 1cm pontatlanság az ultrahangos vevő pozíciójában akár 5cm lokalizációs pontosságot eredményezhet. 10

11 KUTATÁSI EREDMÉNYEK AZ UH. VEVŐK POZÍCIÓJÁNAK KALIBRÁLÁSA Mivel a vevők pozíciója jelentősen befolyásolja a robot pozíció számítását, egy statikus optimizáláson alapó kalibrációs eljárást dolgoztunk ki a robot környezetében elhelyezett ultrahangos vevők pontos pozíciójának meghatározására. 11

12 KUTATÁSI EREDMÉNYEK KÉTLÉPCSŐS KÁLMÁN SZŰRŐ SZENZORFÚZIÓRA Figyelembe vettük, hogy az ultrahangos lokalizáció esetében mérési frekvencia kissebb, mint az inerciális szenzor jeleinek mérési frekvenciája. Figyelembe vettük a nagyfrekvenciás mérési zajokat (inerciális szenzor, ultrahangos mérések) valamint a gyorsulás- és giroszkópmérés ofszetjét (konstans mérési hiba) Ennek megfelelően egy kétlépcsős Kálmán szűrő alapú fúziós technikát dolgoztunk ki. Az első lépésben a robot orientációját becsültük meg az inerciális szenzor mérési rátájával lineáris Kálmán szűrő alkalmazásával. A második lépésben a robot pozícióját és lineáris sebességét határoztuk meg: a nemlineáris szűrő predikciós lépésének rátája megegyezik az inerciális szenzor mérésének frekvenciájával. A szűrő javító lépésének frekvenciája megegyezik az ultrahangos lokalizációs rendszer mérési frekvenciájával. 12

13 KUTATÁSI EREDMÉNYEK ROBOTMODELL A LOKALIZÁCIÓHOZ Lineáris modell az első lépéshez Nemlineáris modell a második lépéshez 13


14 KUTATÁSI EREDMÉNYEK SZIMULÁCIÓ ELSŐ LÉPÉS A robot orientációjának és a giroszkóp offszetjének becslése Lineáris Kálmán Szűrővel 14

15 KUTATÁSI EREDMÉNYEK SZIMULÁCIÓ MÁSODIK LÉPÉS A robot pozíciójának és lineáris sebességkomponenseinek becslése Kiterjesztett Kálmán Szűrővel 15


16 KUTATÁSI EREDMÉNYEK SZIMULÁCIÓ: UKF-EKF ÖSSZEHASONLÍTÁS A nemlineáris szűrő magvalósításához két módszert teszteltünk: a Kiterjesztett Kálmán Szűrőt és a Unscented Kálmán Szűrőt 16

17 KUTATÁSI EREDMÉNYEK SZIMULÁCIÓ: UKF-EKF ÖSSZEHASONLÍTÁS A Kiterjesztett Kálmán Szűrő és az Unscented Kálmán Szűrő alapú pozícióbecslés 17

18 KUTATÁSI EREDMÉNYEK VALÓS IDEJŰ MÉRÉSEK Az első valós idejű mérési eredmények KUKA Youbot mobilis platformmal ponttól-pontig mozgás esetén 18


19 PUBLIKÁCIÓ ELFOGADOTT KONFERENCIACIKK 19
20 KUTATÁSI FELADATOK TELJESÍTÉSE Márton Lőrinc 2014 augusztus-oktober Kálmán szűrő, kiterjesztett Kálmán szűrő elméletének feldolgozása Particle Filter, Unscented Kalman Filter elméletének feldolgozása A Kálmán szűrő alapú szenzorfúzió kidolgozása Elvégezve: Lásd: Kutatasi_ Beszamolo_Aug_Okt_Marton_Lorinc.pdf Márton Lőrinc 2014 november-december Lineáris Kálmán szűrőn alapuló robot lokalizációs mérések Konferencia cikk írása Kiterjesztett Kálmán szűrőn alapuló robot lokalizációs mérések Elvégezve: Lásd: Kutatasi_ Beszamolo_Nov_Dec_Marton_Lorinc.pdf Lásd: ICIT 2015 publikáció Nagy Csaba 2014 augusztus-oktober Ultrahangos jeladó eszköz hardver fejlesztése Beágyazott rendszer alapú ultrahangos vevő eszköz hardver fejlesztése Ultrahangos távolságmérő szoftver fejlesztése, kommunikáció megvalósítása a lokalizációt végző rendszerelemek között Elvégezve: Lásd: Kutatasi_ Beszamolo_Aug_Okt_Nagy_Csaba.pdf Nagy Csaba 2014 november-december Számítógépes szoftver fejlesztése robot lokalizációra A lokalizációs rendszer automatikus kalibrációjának kidolgozása és megvalósítása Az ultrahangos vevők optimális térbeli elhelyezésének kidolgozása és megvalósítása Elvégezve: Lásd: Kutatasi_ Beszamolo_Nov_Dec_Nagy_Csaba.pdf Lásd: ICIT 2015 publikáció Bíró Zalán 2014 augusztus-oktober Inerciális szenzor jeleit feldolgozó beágyazott rendszer hardver fejlesztése A szenzor jeleinek beolvasásra alkalmas szoftver fejlesztése Szenzor jelek mérési arhitekturájának tesztelése, mérések Elvégezve: Lásd:Kutatasi_ Beszamolo_Aug_Okt_Biro_Zalan.pdf Bíró Zalán 2014 november-december Szimulációs szoftver a lineáris Kálmán szűrő teszteléséhez A lineáris Kálmán szűrő valós idejű megvalósítása A kiterjesztett Kálmán szűrő szimulációja Elvégezve: Lásd:Kutatasi_ Beszamolo_Nov_Dec_Biro_Zalan.pdf Lásd: ICIT 2015 publikáció 20

21 JÖVŐBELI TERVEK Más, korszerű szűrési eljárások (például Particle Filter) vizsgálata és alkalmazása a kidolgozott szenzorfúziós eljáráshoz. Valós idejű implementáció és mérések komplex robotmozgáshoz. A lokalizáció robusztusságának növelése, a vevők rövid idejű árnyékolásának kompenzálása. Robotirányítási algoritmus fejlesztése amely alkalmazza a szenzorfúziós eljárás által szolgáltatott robotpozíciót és sebességeket. A robotlokalizációs rendszer kiterjesztése több, egy-időben mozgó robotra. 21
22 infokommunikációs technológiák KÖSZÖNÖM A FIGYELMET!
Beltéri autonóm négyrotoros helikopter szabályozó rendszerének kifejlesztése és hardware-in-the-loop tesztelése
 Beltéri autonóm négyrotoros helikopter szabályozó rendszerének kifejlesztése és hardware-in-the-loop tesztelése Regula Gergely, Lantos Béla BME Villamosmérnöki és Informatikai Kar Irányítástechnika és
Beltéri autonóm négyrotoros helikopter szabályozó rendszerének kifejlesztése és hardware-in-the-loop tesztelése Regula Gergely, Lantos Béla BME Villamosmérnöki és Informatikai Kar Irányítástechnika és
VTOL UAV. Inerciális mérőrendszer kiválasztása vezetőnélküli repülőeszközök számára. Árvai László, Doktorandusz, ZMNE
 Inerciális mérőrendszer kiválasztása vezetőnélküli repülőeszközök számára Árvai László, Doktorandusz, ZMNE Tartalom Fejezet Témakör 1. Vezető nélküli repülőeszközök 2. Inerciális mérőrendszerek feladata
Inerciális mérőrendszer kiválasztása vezetőnélküli repülőeszközök számára Árvai László, Doktorandusz, ZMNE Tartalom Fejezet Témakör 1. Vezető nélküli repülőeszközök 2. Inerciális mérőrendszerek feladata
Autonóm jármű forgalomszimulátorba illesztése
 Autonóm jármű forgalomszimulátorba illesztése Szalai Mátyás 2018 Konzulens: Dr. Tettamanti Tamás A szimulációs feladat Miért hasznos? Biztonságos környezetben nyújt lehetőséget az autonóm járművek forgalmi
Autonóm jármű forgalomszimulátorba illesztése Szalai Mátyás 2018 Konzulens: Dr. Tettamanti Tamás A szimulációs feladat Miért hasznos? Biztonságos környezetben nyújt lehetőséget az autonóm járművek forgalmi
Mozgó jármű helyzetének és tájolásának meghatározása alacsony árú GNSS és inerciális érzékelők szoros csatolású integrációjával
 Mozgó jármű helyzetének és tájolásának meghatározása alacsony árú GNSS és inerciális érzékelők szoros csatolású integrációjával Farkas Márton Rédey István Geodéziai Szeminárium 2019. április 2. Áttekintés
Mozgó jármű helyzetének és tájolásának meghatározása alacsony árú GNSS és inerciális érzékelők szoros csatolású integrációjával Farkas Márton Rédey István Geodéziai Szeminárium 2019. április 2. Áttekintés
ÉRZÉKELŐK ÉS BEAVATKOZÓK I. 0. TANTÁRGY ISMERTETŐ
 ÉRZÉKELŐK ÉS BEAVATKOZÓK I. 0. TANTÁRGY ISMERTETŐ Dr. Soumelidis Alexandros 2018.09.06. BME KÖZLEKEDÉSMÉRNÖKI ÉS JÁRMŰMÉRNÖKI KAR 32708-2/2017/INTFIN SZÁMÚ EMMI ÁLTAL TÁMOGATOTT TANANYAG A tárgy célja
ÉRZÉKELŐK ÉS BEAVATKOZÓK I. 0. TANTÁRGY ISMERTETŐ Dr. Soumelidis Alexandros 2018.09.06. BME KÖZLEKEDÉSMÉRNÖKI ÉS JÁRMŰMÉRNÖKI KAR 32708-2/2017/INTFIN SZÁMÚ EMMI ÁLTAL TÁMOGATOTT TANANYAG A tárgy célja
SZENZORMODUL ILLESZTÉSE LEGO NXT PLATFORMHOZ. Készítette: Horváth András MSc Önálló laboratórium 2 Konzulens: Orosz György
 SZENZORMODUL ILLESZTÉSE LEGO NXT PLATFORMHOZ Készítette: Horváth András MSc Önálló laboratórium 2 Konzulens: Orosz György BEVEZETÉS Simonyi Károly szakkollégium LEGO és robotika kör NXT Cél: Választott
SZENZORMODUL ILLESZTÉSE LEGO NXT PLATFORMHOZ Készítette: Horváth András MSc Önálló laboratórium 2 Konzulens: Orosz György BEVEZETÉS Simonyi Károly szakkollégium LEGO és robotika kör NXT Cél: Választott
NGB_IN040_1 SZIMULÁCIÓS TECHNIKÁK dr. Pozna Claudio Radu, Horváth Ernő
 SZÉCHENYI ISTVÁN EGYETEM Műszaki Tudományi Kar Informatika Tanszék BSC FOKOZATÚ MÉRNÖK INFORMATIKUS SZAK NGB_IN040_1 SZIMULÁCIÓS TECHNIKÁK dr. Pozna Claudio Radu, Horváth Ernő Fejlesztői dokumentáció GROUP#6
SZÉCHENYI ISTVÁN EGYETEM Műszaki Tudományi Kar Informatika Tanszék BSC FOKOZATÚ MÉRNÖK INFORMATIKUS SZAK NGB_IN040_1 SZIMULÁCIÓS TECHNIKÁK dr. Pozna Claudio Radu, Horváth Ernő Fejlesztői dokumentáció GROUP#6
Mozgásmodellezés. Lukovszki Csaba. Navigációs és helyalapú szolgáltatások és alkalmazások (VITMMA07)
") TÁVKÖZLÉSI ÉS MÉDIAINFORMATIKAI TANSZÉK () BUDAPESTI MŰSZAKI ÉS GAZDASÁGTUDOMÁNYI EGYETEM (BME) Mozgásmodellezés Lukovszki Csaba Áttekintés» Probléma felvázolása» Szabadsági fokok» Diszkretizált» Hibát
TÁVKÖZLÉSI ÉS MÉDIAINFORMATIKAI TANSZÉK () BUDAPESTI MŰSZAKI ÉS GAZDASÁGTUDOMÁNYI EGYETEM (BME) Mozgásmodellezés Lukovszki Csaba Áttekintés» Probléma felvázolása» Szabadsági fokok» Diszkretizált» Hibát
Robotok inverz geometriája
 Robotok inverz geometriája. A gyakorlat célja Inverz geometriai feladatot megvalósító függvények implementálása. A megvalósított függvénycsomag tesztelése egy kétszabadságfokú kar előírt végberendezés
Robotok inverz geometriája. A gyakorlat célja Inverz geometriai feladatot megvalósító függvények implementálása. A megvalósított függvénycsomag tesztelése egy kétszabadságfokú kar előírt végberendezés
Szenzorcsatolt robot: A szenzorcsatolás lépései:
 1. Mi a szenzorcsatolt robot, hogyan épül fel? Ismertesse a szenzorcsatolás lépéseit röviden az Egységes szenzorplatform architektúra segítségével. Mikor beszélünk szenzorfúzióról? Milyen módszereket használhatunk?
1. Mi a szenzorcsatolt robot, hogyan épül fel? Ismertesse a szenzorcsatolás lépéseit röviden az Egységes szenzorplatform architektúra segítségével. Mikor beszélünk szenzorfúzióról? Milyen módszereket használhatunk?
Ember és robot együttműködése a gyártásban Ipar 4.0
 Helyszín: MTA Székház, Felolvasóterem Időpont: 2017. November 7. Ember és robot együttműködése a gyártásban Ipar 4.0 Dr. Erdős Ferenc Gábor MTA SZTAKI Fejlett robotika ígérete A fejlett robotika és az
Helyszín: MTA Székház, Felolvasóterem Időpont: 2017. November 7. Ember és robot együttműködése a gyártásban Ipar 4.0 Dr. Erdős Ferenc Gábor MTA SZTAKI Fejlett robotika ígérete A fejlett robotika és az
Robotika. Relatív helymeghatározás Odometria
 Robotika Relatív helymeghatározás Odometria Differenciális hajtás c m =πd n /nc e c m D n C e n = hány mm-t tesz meg a robot egy jeladó impulzusra = névleges kerék átmérő = jeladó fölbontása (impulzus/ford.)
Robotika Relatív helymeghatározás Odometria Differenciális hajtás c m =πd n /nc e c m D n C e n = hány mm-t tesz meg a robot egy jeladó impulzusra = névleges kerék átmérő = jeladó fölbontása (impulzus/ford.)
Gyakorlatok. VITMMA09 Okos város MSc mellékspecializáció
 Gyakorlatok VITMMA09 Okos város MSc mellékspecializáció ITS gyakorlatok Cél Gyakorlati tudással kiegészíteni az elméleti ismereteket Példák a való világból, korlátozott de valósághű környezetben Tervezés,
Gyakorlatok VITMMA09 Okos város MSc mellékspecializáció ITS gyakorlatok Cél Gyakorlati tudással kiegészíteni az elméleti ismereteket Példák a való világból, korlátozott de valósághű környezetben Tervezés,
4. Lokalizáció Magyar Attila
 4. Lokalizáció Magyar Attila Pannon Egyetem Műszaki Informatikai Kar Villamosmérnöki és Információs Rendszerek Tanszék magyar.attila@virt.uni-pannon.hu 2011. szeptember 23. 4. Lokalizáció 2 4. Tartalom
4. Lokalizáció Magyar Attila Pannon Egyetem Műszaki Informatikai Kar Villamosmérnöki és Információs Rendszerek Tanszék magyar.attila@virt.uni-pannon.hu 2011. szeptember 23. 4. Lokalizáció 2 4. Tartalom
A NIKK LOGISZTIKAI RENDSZEREK INFORMÁCIÓS TECHNOLÓGIÁJÁBAN ELÉRT EREDMÉNYEINEK BEMUTATÁSA
 infokommunikációs technológiák A NIKK LOGISZTIKAI RENDSZEREK INFORMÁCIÓS TECHNOLÓGIÁJÁBAN ELÉRT EREDMÉNYEINEK BEMUTATÁSA Heckl István Projektzáró rendezvény Veszprém, 2015. június 22. TARTALOM I.1 Felhő
infokommunikációs technológiák A NIKK LOGISZTIKAI RENDSZEREK INFORMÁCIÓS TECHNOLÓGIÁJÁBAN ELÉRT EREDMÉNYEINEK BEMUTATÁSA Heckl István Projektzáró rendezvény Veszprém, 2015. június 22. TARTALOM I.1 Felhő
ÉRZÉKELŐK ÉS BEAVATKOZÓK I. PÉLDÁK - FELADATOK
 ÉRZÉKELŐK ÉS BEAVATKOZÓK I. PÉLDÁK - FELADATOK Dr. Soumelidis Alexandros 2018.09.06. BME KÖZLEKEDÉSMÉRNÖKI ÉS JÁRMŰMÉRNÖKI KAR 32708-2/2017/INTFIN SZÁMÚ EMMI ÁLTAL TÁMOGATOTT TANANYAG Idei fő példafeladat:
ÉRZÉKELŐK ÉS BEAVATKOZÓK I. PÉLDÁK - FELADATOK Dr. Soumelidis Alexandros 2018.09.06. BME KÖZLEKEDÉSMÉRNÖKI ÉS JÁRMŰMÉRNÖKI KAR 32708-2/2017/INTFIN SZÁMÚ EMMI ÁLTAL TÁMOGATOTT TANANYAG Idei fő példafeladat:
KÖSZÖNTJÜK HALLGATÓINKAT!
 2010. november 10. KÖSZÖNTJÜK HALLGATÓINKAT! Önök Dr. Horváth Zoltán Módszerek, amelyek megváltoztatják a világot A számítógépes szimuláció és optimalizáció jelentősége c. előadását hallhatják! 1 Módszerek,
2010. november 10. KÖSZÖNTJÜK HALLGATÓINKAT! Önök Dr. Horváth Zoltán Módszerek, amelyek megváltoztatják a világot A számítógépes szimuláció és optimalizáció jelentősége c. előadását hallhatják! 1 Módszerek,
Markerek jól felismerhetőek, elkülöníthetők a környezettől Korlátos hiba
 1. Ismertesse a relatív és abszolút pozíciómegatározás tulajdonságait, és lehetőségeit. Mit jelent a dead reckoning, és mi az odometria? Milyen hibalehetőségekre kell számítanunk odometria alkalmazásakor?
1. Ismertesse a relatív és abszolút pozíciómegatározás tulajdonságait, és lehetőségeit. Mit jelent a dead reckoning, és mi az odometria? Milyen hibalehetőségekre kell számítanunk odometria alkalmazásakor?
FELHŐ ALAPÚ HELYMEGHATÁROZÓ SZOLGÁLTATÁS KIFEJLESZTÉSE MOBIL ESZKÖZÖK SZÁMÁRA
 infokommunikációs technológiák FELHŐ ALAPÚ HELYMEGHATÁROZÓ SZOLGÁLTATÁS KIFEJLESZTÉSE MOBIL ESZKÖZÖK SZÁMÁRA BEVEZETÉS Probléma felvetés beltéri vs. kültéri lokalizáció elterjedtsége már több mint egy
infokommunikációs technológiák FELHŐ ALAPÚ HELYMEGHATÁROZÓ SZOLGÁLTATÁS KIFEJLESZTÉSE MOBIL ESZKÖZÖK SZÁMÁRA BEVEZETÉS Probléma felvetés beltéri vs. kültéri lokalizáció elterjedtsége már több mint egy
RFID rendszer felépítése
 RFID és RTLS RFID rendszer felépítése 1. Tag-ek (transzponder) 2. Olvasók (interrogátor) 3. Számítógépes infrastruktúra 4. Szoftverek Tárgyak, élőlények, helyszínek azonosítása, követése és menedzsmentje
RFID és RTLS RFID rendszer felépítése 1. Tag-ek (transzponder) 2. Olvasók (interrogátor) 3. Számítógépes infrastruktúra 4. Szoftverek Tárgyak, élőlények, helyszínek azonosítása, követése és menedzsmentje
Piri Dávid. Mérőállomás célkövető üzemmódjának pontossági vizsgálata
 Piri Dávid Mérőállomás célkövető üzemmódjának pontossági vizsgálata Feladat ismertetése Mozgásvizsgálat robot mérőállomásokkal Automatikus irányzás Célkövetés Pozíció folyamatos rögzítése Célkövető üzemmód
Piri Dávid Mérőállomás célkövető üzemmódjának pontossági vizsgálata Feladat ismertetése Mozgásvizsgálat robot mérőállomásokkal Automatikus irányzás Célkövetés Pozíció folyamatos rögzítése Célkövető üzemmód
TÉRINFORMATIKA II. Dr. Kulcsár Balázs egyetemi docens. Debreceni Egyetem Műszaki Kar Műszaki Alaptárgyi Tanszék
 TÉRINFORMATIKA II. Dr. Kulcsár Balázs egyetemi docens Debreceni Egyetem Műszaki Kar Műszaki Alaptárgyi Tanszék ELSŐDLEGES ADATNYERÉSI ELJÁRÁSOK 2. Inerciális rendszerek Távérzékelés Rádiótelefonok Mobil
TÉRINFORMATIKA II. Dr. Kulcsár Balázs egyetemi docens Debreceni Egyetem Műszaki Kar Műszaki Alaptárgyi Tanszék ELSŐDLEGES ADATNYERÉSI ELJÁRÁSOK 2. Inerciális rendszerek Távérzékelés Rádiótelefonok Mobil
A LEGO Mindstorms EV3 programozása
 A LEGO Mindstorms EV3 programozása 1. A fejlesztői környezet bemutatása 12. Az MPU6050 gyorsulás- és szögsebességmérő szenzor Orosz Péter 1 Felhasznált irodalom LEGO MINDSTORMS EV3: Felhasználói útmutató
A LEGO Mindstorms EV3 programozása 1. A fejlesztői környezet bemutatása 12. Az MPU6050 gyorsulás- és szögsebességmérő szenzor Orosz Péter 1 Felhasznált irodalom LEGO MINDSTORMS EV3: Felhasználói útmutató
KUTATÁSI JELENTÉS. Multilaterációs radarrendszer kutatása. Szüllő Ádám
 KUTATÁSI JELENTÉS Multilaterációs radarrendszer kutatása Szüllő Ádám 212 Bevezetés A Mikrohullámú Távérzékelés Laboratórium jelenlegi K+F tevékenységei közül ezen jelentés a multilaterációs radarrendszerek
KUTATÁSI JELENTÉS Multilaterációs radarrendszer kutatása Szüllő Ádám 212 Bevezetés A Mikrohullámú Távérzékelés Laboratórium jelenlegi K+F tevékenységei közül ezen jelentés a multilaterációs radarrendszerek
Informatika a valós világban: a számítógépek és környezetünk kapcsolódási lehetőségei
 Informatika a valós világban: a számítógépek és környezetünk kapcsolódási lehetőségei Dr. Gingl Zoltán SZTE, Kísérleti Fizikai Tanszék Szeged, 2000 Február e-mail : gingl@physx.u-szeged.hu 1 Az ember kapcsolata
Informatika a valós világban: a számítógépek és környezetünk kapcsolódási lehetőségei Dr. Gingl Zoltán SZTE, Kísérleti Fizikai Tanszék Szeged, 2000 Február e-mail : gingl@physx.u-szeged.hu 1 Az ember kapcsolata
IV.7 MÓDSZER KIDOLGOZÁSA FELHASZNÁLÓI ADATOK VÉDELMÉRE MOBIL ALKALMAZÁSOK ESETÉN
 infokommunikációs technológiák IV.7 MÓDSZER KIDOLGOZÁSA FELHASZNÁLÓI ADATOK VÉDELMÉRE MOBIL ALKALMAZÁSOK ESETÉN ANTAL Margit, SZABÓ László Zsolt 2015, január 8. BEVEZETÉS A KUTATÁS CÉLJA A felhasználó
infokommunikációs technológiák IV.7 MÓDSZER KIDOLGOZÁSA FELHASZNÁLÓI ADATOK VÉDELMÉRE MOBIL ALKALMAZÁSOK ESETÉN ANTAL Margit, SZABÓ László Zsolt 2015, január 8. BEVEZETÉS A KUTATÁS CÉLJA A felhasználó
PTE PMMIK, SzKK Smart City Technologies, BimSolutions.hu 1
 BEMUTATKOZÁS Diploma (2009) Építészirodai munka, tervezési gyakorlat VICO vcs, (vce), pl, trainer (2010) PhD tanulmányok + oktatás Kutatócsoport + saját projektek (2014) BimSolutions.hu 1 BIM FELHASZNÁLÁSI
BEMUTATKOZÁS Diploma (2009) Építészirodai munka, tervezési gyakorlat VICO vcs, (vce), pl, trainer (2010) PhD tanulmányok + oktatás Kutatócsoport + saját projektek (2014) BimSolutions.hu 1 BIM FELHASZNÁLÁSI
Intelligens beágyazott rendszer üvegházak irányításában
 P5-T6: Algoritmustervezési környezet kidolgozása intelligens autonóm rendszerekhez Intelligens beágyazott rendszer üvegházak irányításában Eredics Péter, Dobrowiecki P. Tadeusz, BME-MIT 1 Üvegházak Az
P5-T6: Algoritmustervezési környezet kidolgozása intelligens autonóm rendszerekhez Intelligens beágyazott rendszer üvegházak irányításában Eredics Péter, Dobrowiecki P. Tadeusz, BME-MIT 1 Üvegházak Az
Székesfehérvár
 1 2009.03.19. - Székesfehérvár System1200-2004 SmartStation - 2005 SmartRover - 2006 SmartPole/TPS1200+ 2007 SmartRTK + MAC 2008 GPS1200+ GNSS 2009-200? 2 ? Elérhető GNSS jelek haszn. Modern hálózati megold.
1 2009.03.19. - Székesfehérvár System1200-2004 SmartStation - 2005 SmartRover - 2006 SmartPole/TPS1200+ 2007 SmartRTK + MAC 2008 GPS1200+ GNSS 2009-200? 2 ? Elérhető GNSS jelek haszn. Modern hálózati megold.
Intelligens Közlekedési Rendszerek 2
 Intelligens Közlekedési Rendszerek 2 Máté Miklós 2016 Október 11 1 / 14 Szenzor (érzékelő): mérés, detektálás Mérés elmélet emlékeztető Jó mérőműszer tulajdonságai Érzékeny a mérendő tulajdonságra Érzéketlen
Intelligens Közlekedési Rendszerek 2 Máté Miklós 2016 Október 11 1 / 14 Szenzor (érzékelő): mérés, detektálás Mérés elmélet emlékeztető Jó mérőműszer tulajdonságai Érzékeny a mérendő tulajdonságra Érzéketlen
Intelligens Rendszerek
 Intelligens Rendszerek Robotok http://mobil.nik.uni-obuda.hu http://mobil.nik.uni-obuda.hu/tantargyak/irg/segedanyagok/ B Biology Biológiai mintára készített, E Electronics elektronikusan működtetett,
Intelligens Rendszerek Robotok http://mobil.nik.uni-obuda.hu http://mobil.nik.uni-obuda.hu/tantargyak/irg/segedanyagok/ B Biology Biológiai mintára készített, E Electronics elektronikusan működtetett,
IoT alapú mezőgazdasági adatgyűjtő prototípus fejlesztési tapasztalatok
 IoT alapú mezőgazdasági adatgyűjtő prototípus fejlesztési tapasztalatok 2016.05.19. Szilágyi Róbert Tóth Mihály Debreceni Egyetem Az IoT Eszközök és más fizikai objektumok elektronikával, vezérléssel,
IoT alapú mezőgazdasági adatgyűjtő prototípus fejlesztési tapasztalatok 2016.05.19. Szilágyi Róbert Tóth Mihály Debreceni Egyetem Az IoT Eszközök és más fizikai objektumok elektronikával, vezérléssel,
ROBOT IRÁNYÍTÁS INFRAVÖRÖS LED TÖMBBEL
 TÁMOP-4.2.2.C-11/1/KONV-212-4 infokommunikációs technológiák ROBOT IRÁNYÍTÁS INFRAVÖRÖS LED TÖMBBEL A KUTATÁSI TERÜLET RÖVID MEGFOGALMAZÁSA TÁMOP-4.2.2.C-11/1/KONV-212-4 Célok: Növekvő érdeklődés a non-boolean
TÁMOP-4.2.2.C-11/1/KONV-212-4 infokommunikációs technológiák ROBOT IRÁNYÍTÁS INFRAVÖRÖS LED TÖMBBEL A KUTATÁSI TERÜLET RÖVID MEGFOGALMAZÁSA TÁMOP-4.2.2.C-11/1/KONV-212-4 Célok: Növekvő érdeklődés a non-boolean
Témák 2014/15/1. Dr. Ruszinkó Endre, egyetemi docens
 Témák 2014/15/1 Dr. Ruszinkó Endre, egyetemi docens 1. A V6 Otto motorok gyártása során fellépő hibatípusok elemzése 2. Szelepgyűrű megmunkálás optimális folyamatának kidolgozása 3. Szerszámcsere folyamatának
Témák 2014/15/1 Dr. Ruszinkó Endre, egyetemi docens 1. A V6 Otto motorok gyártása során fellépő hibatípusok elemzése 2. Szelepgyűrű megmunkálás optimális folyamatának kidolgozása 3. Szerszámcsere folyamatának
Korszerű mérőeszközök alkalmazása a gépszerkezettan oktatásában
 Korszerű mérőeszközök alkalmazása a gépszerkezettan oktatásában Dr. Kátai László, tanszékvezető, egyetemi docens Mechanikai és Géptani Intézet Gépszerkezettan Tanszék Bevezetés Gépszerkezettan a tantervben
Korszerű mérőeszközök alkalmazása a gépszerkezettan oktatásában Dr. Kátai László, tanszékvezető, egyetemi docens Mechanikai és Géptani Intézet Gépszerkezettan Tanszék Bevezetés Gépszerkezettan a tantervben
7. Laboratóriumi gyakorlat KIS ELMOZDULÁSOK MÉRÉSE KAPACITÍV ÉS INDUKTÍV MÓDSZERREL
 7. Laboratóriumi gyakorlat KIS ELMOZDULÁSOK MÉRÉSE KAPACITÍV ÉS INDUKTÍV MÓDSZERREL 1. A gyakorlat célja Kis elmozulások (.1mm 1cm) mérésének bemutatása egyszerű felépítésű érzékkőkkel. Kapacitív és inuktív
7. Laboratóriumi gyakorlat KIS ELMOZDULÁSOK MÉRÉSE KAPACITÍV ÉS INDUKTÍV MÓDSZERREL 1. A gyakorlat célja Kis elmozulások (.1mm 1cm) mérésének bemutatása egyszerű felépítésű érzékkőkkel. Kapacitív és inuktív
ÉRZÉKELŐK ÉS BEAVATKOZÓK I. 3. MÉRÉSFELDOLGOZÁS
 ÉRZÉKELŐK ÉS BEAVATKOZÓK I. 3. MÉRÉSFELDOLGOZÁS Dr. Soumelidis Alexandros 2018.10.04. BME KÖZLEKEDÉSMÉRNÖKI ÉS JÁRMŰMÉRNÖKI KAR 32708-2/2017/INTFIN SZÁMÚ EMMI ÁLTAL TÁMOGATOTT TANANYAG Mérés-feldolgozás
ÉRZÉKELŐK ÉS BEAVATKOZÓK I. 3. MÉRÉSFELDOLGOZÁS Dr. Soumelidis Alexandros 2018.10.04. BME KÖZLEKEDÉSMÉRNÖKI ÉS JÁRMŰMÉRNÖKI KAR 32708-2/2017/INTFIN SZÁMÚ EMMI ÁLTAL TÁMOGATOTT TANANYAG Mérés-feldolgozás
HIL SZIMULÁCIÓ ROBOTPILÓTA FEJLESZTÉSBEN
 Dr. Molnár András - Stojcsics Dániel HIL SZIMULÁCIÓ ROBOTPILÓTA FEJLESZTÉSBEN Bevezető Pilóta nélküli robotrepülőgéppel végzett kutatás és fejlesztés elengedhetetlen része a tesztelés. Az időjárási feltételek
Dr. Molnár András - Stojcsics Dániel HIL SZIMULÁCIÓ ROBOTPILÓTA FEJLESZTÉSBEN Bevezető Pilóta nélküli robotrepülőgéppel végzett kutatás és fejlesztés elengedhetetlen része a tesztelés. Az időjárási feltételek
Gingl Zoltán, Szeged, 2015. 2015.09.29. 19:14 Elektronika - Alapok
 Gingl Zoltán, Szeged, 2015. 1 2 Az előadás diasora (előre elérhető a teljes anyag, fejlesztések mindig történnek) Könyv: Török Miklós jegyzet Tiezte, Schenk, könyv interneten elérhető anyagok Laborjegyzet,
Gingl Zoltán, Szeged, 2015. 1 2 Az előadás diasora (előre elérhető a teljes anyag, fejlesztések mindig történnek) Könyv: Török Miklós jegyzet Tiezte, Schenk, könyv interneten elérhető anyagok Laborjegyzet,
SVANTEK. Termékismertető
 SVANTEK Termékismertető Zajszintmérő analizátor SVAN 979 1. pontossági osztály Alacsony belső zaj
SVANTEK Termékismertető Zajszintmérő analizátor SVAN 979 1. pontossági osztály Alacsony belső zaj
Üzemanyagfogyasztást becslő rendszer fejlesztése mobilapplikációval BARTA TAMÁS (EWGO7V)
") Üzemanyagfogyasztást becslő rendszer fejlesztése mobilapplikációval BARTA TAMÁS (EWGO7V) Alkalmazott megoldások a fogyasztás becslésére Tankszint mérésen alapuló becslés A tüzelőanyag a tartályban hullámzik,
Üzemanyagfogyasztást becslő rendszer fejlesztése mobilapplikációval BARTA TAMÁS (EWGO7V) Alkalmazott megoldások a fogyasztás becslésére Tankszint mérésen alapuló becslés A tüzelőanyag a tartályban hullámzik,
Kamerakalibráció és pozícióbecslés érzékenységi analízissel, sík mintázatokból. Dabóczi Tamás (BME MIT), Fazekas Zoltán (MTA SZTAKI)
, Fazekas Zoltán (MTA SZTAKI)") , 2008 feb. 4-5 Kamerakalibráció és pozícióbecslés érzékenységi Bódis-Szomorú András Dabóczi Tamás (BME MIT), Fazekas Zoltán (MTA SZTAKI) Méréstechnika- és Információs Rendszerek Tanszék BME Rendszer-
, 2008 feb. 4-5 Kamerakalibráció és pozícióbecslés érzékenységi Bódis-Szomorú András Dabóczi Tamás (BME MIT), Fazekas Zoltán (MTA SZTAKI) Méréstechnika- és Információs Rendszerek Tanszék BME Rendszer-
Akusztikus MEMS szenzor vizsgálata. Sós Bence JB2BP7
 Akusztikus MEMS szenzor vizsgálata Sós Bence JB2BP7 Tartalom MEMS mikrofon felépítése és típusai A PDM jel Kinyerhető információ CIC szűrő Mérési tapasztalatok. Konklúzió MEMS (MicroElectrical-Mechanical
Akusztikus MEMS szenzor vizsgálata Sós Bence JB2BP7 Tartalom MEMS mikrofon felépítése és típusai A PDM jel Kinyerhető információ CIC szűrő Mérési tapasztalatok. Konklúzió MEMS (MicroElectrical-Mechanical
1. Metrológiai alapfogalmak. 2. Egységrendszerek. 2.0 verzió
 Mérés és adatgyűjtés - Kérdések 2.0 verzió Megjegyzés: ezek a kérdések a felkészülést szolgálják, nem ezek lesznek a vizsgán. Ha valaki a felkészülése alapján önállóan válaszolni tud ezekre a kérdésekre,
Mérés és adatgyűjtés - Kérdések 2.0 verzió Megjegyzés: ezek a kérdések a felkészülést szolgálják, nem ezek lesznek a vizsgán. Ha valaki a felkészülése alapján önállóan válaszolni tud ezekre a kérdésekre,
FoodManufuture FP7 projekt
 FoodManufuture FP7 projekt Virtuális és kibővített (augmented) valóság - Élelmiszeripari igények és alkalmazási lehetőségek dr. Sebők András Campden BRI Magyarország FoodManufuture workshop Budapest, Vidékfejlesztési
FoodManufuture FP7 projekt Virtuális és kibővített (augmented) valóság - Élelmiszeripari igények és alkalmazási lehetőségek dr. Sebők András Campden BRI Magyarország FoodManufuture workshop Budapest, Vidékfejlesztési
PÁLYÁZATI FELHÍVÁS. Külső forrásból támogatott tudományos ösztöndíj az ELTE hallgatói számára
 EÖTVÖS LORÁND TUDOMÁNYEGYETEM INFORMATIKAI KAR 1117 Budapest, Pázmány Péter sétány 1/C. 1518 Budapest, Pf. 120. Telefon: (1) 372-2500 Fax: (1) 381-2140 PÁLYÁZATI FELHÍVÁS Külső forrásból támogatott tudományos
EÖTVÖS LORÁND TUDOMÁNYEGYETEM INFORMATIKAI KAR 1117 Budapest, Pázmány Péter sétány 1/C. 1518 Budapest, Pf. 120. Telefon: (1) 372-2500 Fax: (1) 381-2140 PÁLYÁZATI FELHÍVÁS Külső forrásból támogatott tudományos
ELTE Informatikai Kooperációs Kutatási és Oktatási Központ. Az ELTE-Soft KMOP-1.1.2-08/1-2008-0002 jelű pályázat zárórendezvénye 2012.05.31.
 ELTE Informatikai Kooperációs Kutatási és Oktatási Központ Az ELTE-Soft KMOP-1.1.2-08/1-2008-0002 jelű pályázat zárórendezvénye 2012.05.31. Stratégiai jellemzők Cél hazai szoftveripar versenyképességének
ELTE Informatikai Kooperációs Kutatási és Oktatási Központ Az ELTE-Soft KMOP-1.1.2-08/1-2008-0002 jelű pályázat zárórendezvénye 2012.05.31. Stratégiai jellemzők Cél hazai szoftveripar versenyképességének
Quadkopter szimulációja LabVIEW környezetben Simulation of a Quadcopter with LabVIEW
 Quadkopter szimulációja LabVIEW környezetben Simulation of a Quadcopter with LabVIEW T. KISS 1 P. T. SZEMES 2 1University of Debrecen, kiss.tamas93@gmail.com 2University of Debrecen, szemespeter@eng.unideb.hu
Quadkopter szimulációja LabVIEW környezetben Simulation of a Quadcopter with LabVIEW T. KISS 1 P. T. SZEMES 2 1University of Debrecen, kiss.tamas93@gmail.com 2University of Debrecen, szemespeter@eng.unideb.hu
Épületenergetika és épületmechatronika
 VILLAMOSMÉRNÖKI ÉS MECHATRONIKAI TANSZÉK MŰSZAKI KAR DEBRECENI EGYETEM Épületenergetika és épületmechatronika DR. SZEMES PÉTER TAMÁS DOCENS HOUG KONFERENCIA 2013 2013.04.10. Tartalom Épületmechatronika
VILLAMOSMÉRNÖKI ÉS MECHATRONIKAI TANSZÉK MŰSZAKI KAR DEBRECENI EGYETEM Épületenergetika és épületmechatronika DR. SZEMES PÉTER TAMÁS DOCENS HOUG KONFERENCIA 2013 2013.04.10. Tartalom Épületmechatronika
Autonóm járműrendszerek kutatása a zalaegerszegi autonóm tesztpályához kapcsolódóan. Pályázati témák (3) Téma rövid tartalma
 Téma rövid tartalma") Pályázati témák (3) 1 Mesterséges intelligencia alapú döntési modellek fejlesztése és tesztelése valós autonóm járműves környezetben Szimulációs környezetben kifejlesztett döntési modellek vizsgálata valós
Pályázati témák (3) 1 Mesterséges intelligencia alapú döntési modellek fejlesztése és tesztelése valós autonóm járműves környezetben Szimulációs környezetben kifejlesztett döntési modellek vizsgálata valós
Kategória Összeg Búr Márton A Sik Tamás Dávid A Balangó Dávid B Barta Ágnes B Cseppentő Lajos B Gönczi Tamás B 50000
 Név Kategória Összeg Búr Márton A 70000 Sik Tamás Dávid A 70000 Balangó Dávid B 50000 Barta Ágnes B 50000 Cseppentő Lajos B 50000 Gönczi Tamás B 50000 Hackel Kristóf B 50000 Nagy Ákos B 50000 Nagy Dániel
Név Kategória Összeg Búr Márton A 70000 Sik Tamás Dávid A 70000 Balangó Dávid B 50000 Barta Ágnes B 50000 Cseppentő Lajos B 50000 Gönczi Tamás B 50000 Hackel Kristóf B 50000 Nagy Ákos B 50000 Nagy Dániel
Technikai áttekintés SimDay 2013. H. Tóth Zsolt FEA üzletág igazgató
 Technikai áttekintés SimDay 2013 H. Tóth Zsolt FEA üzletág igazgató Next Limit Technologies Alapítva 1998, Madrid Számítógépes grafika Tudományos- és mérnöki szimulációk Mottó: Innováció 2 Kihívás Technikai
Technikai áttekintés SimDay 2013 H. Tóth Zsolt FEA üzletág igazgató Next Limit Technologies Alapítva 1998, Madrid Számítógépes grafika Tudományos- és mérnöki szimulációk Mottó: Innováció 2 Kihívás Technikai
"Történjen bármi, a vetés mindig kihajt..."
 "Történjen bármi, a vetés mindig kihajt..." Pályázati azonosító: UT-2018-0017 Kutatási projekt címe: Autonóm járművek a mezőgazdaságban Intézmény neve: Csukás Zoltán Mezőgazdasági Szakgimnázium és Szakközépiskola
"Történjen bármi, a vetés mindig kihajt..." Pályázati azonosító: UT-2018-0017 Kutatási projekt címe: Autonóm járművek a mezőgazdaságban Intézmény neve: Csukás Zoltán Mezőgazdasági Szakgimnázium és Szakközépiskola
Infobionika ROBOTIKA. X. Előadás. Robot manipulátorok II. Direkt és inverz kinematika. Készült a HEFOP P /1.0 projekt keretében
 Infobionika ROBOTIKA X. Előadás Robot manipulátorok II. Direkt és inverz kinematika Készült a HEFOP-3.3.1-P.-2004-06-0018/1.0 projekt keretében Tartalom Direkt kinematikai probléma Denavit-Hartenberg konvenció
Infobionika ROBOTIKA X. Előadás Robot manipulátorok II. Direkt és inverz kinematika Készült a HEFOP-3.3.1-P.-2004-06-0018/1.0 projekt keretében Tartalom Direkt kinematikai probléma Denavit-Hartenberg konvenció
B Biology Biológiai mintára készített, E Electronics elektronikusan működtetett, A Aesthetics esztétikusan kivitelezett, M Mechanics mechanikák.
 Robotok B Biology Biológiai mintára készített, E Electronics elektronikusan működtetett, A Aesthetics esztétikusan kivitelezett, M Mechanics mechanikák. B Biology Biológiai mintára készített, E Electronics
Robotok B Biology Biológiai mintára készített, E Electronics elektronikusan működtetett, A Aesthetics esztétikusan kivitelezett, M Mechanics mechanikák. B Biology Biológiai mintára készített, E Electronics
Mozgáselemzés MEMS alapúgyorsulás mérőadatai alapján
 Mozgáselemzés MEMS alapúgyorsulás mérőadatai alapján Nyers Szabina Konzulens: Tihanyi Attila Pázmány Péter Katolikus Egyetem Információs Technológia Kar Feladatok: Végezzen irodalom kutatást, mely tartalmazza
Mozgáselemzés MEMS alapúgyorsulás mérőadatai alapján Nyers Szabina Konzulens: Tihanyi Attila Pázmány Péter Katolikus Egyetem Információs Technológia Kar Feladatok: Végezzen irodalom kutatást, mely tartalmazza
Zárójelentés. Az autonóm mobil eszközök felhasználási területei, irányítási módszerek
 Zárójelentés Az autonóm mobil eszközök felhasználási területei, irányítási módszerek Az autonóm mobil robotok elterjedése növekedést mutat napjainkban az egész hétköznapi felhasználástól kezdve az ember
Zárójelentés Az autonóm mobil eszközök felhasználási területei, irányítási módszerek Az autonóm mobil robotok elterjedése növekedést mutat napjainkban az egész hétköznapi felhasználástól kezdve az ember
T E R M É K T Á J É K O Z TAT Ó
 T E R M É K T Á J É K O Z TAT Ó ÚJ!!! SeCorr 08 korrrelátor A legújabb DSP technikával ellátott számítógépes támogatással rendelkező korrelátor a hibahelyek megtalálásához. 1 MI A KORRELÁCIÓ? A korreláció
T E R M É K T Á J É K O Z TAT Ó ÚJ!!! SeCorr 08 korrrelátor A legújabb DSP technikával ellátott számítógépes támogatással rendelkező korrelátor a hibahelyek megtalálásához. 1 MI A KORRELÁCIÓ? A korreláció
Számítógép-rendszerek fontos jellemzői (Hardver és Szoftver):
:") B Motiváció B Motiváció Számítógép-rendszerek fontos jellemzői (Hardver és Szoftver): Helyesség Felhasználóbarátság Hatékonyság Modern számítógép-rendszerek: Egyértelmű hatékonyság (például hálózati hatékonyság)
B Motiváció B Motiváció Számítógép-rendszerek fontos jellemzői (Hardver és Szoftver): Helyesség Felhasználóbarátság Hatékonyság Modern számítógép-rendszerek: Egyértelmű hatékonyság (például hálózati hatékonyság)
Különböző öntészeti technológiák szimulációja
 Különböző öntészeti technológiák szimulációja Doktoranduszok Fóruma 2012. 11.08. Készítette: Budavári Imre, I. éves doktorandusz hallgató Konzulensek: Dr. Dúl Jenő, Dr. Molnár Dániel Predoktoranduszi időszak
Különböző öntészeti technológiák szimulációja Doktoranduszok Fóruma 2012. 11.08. Készítette: Budavári Imre, I. éves doktorandusz hallgató Konzulensek: Dr. Dúl Jenő, Dr. Molnár Dániel Predoktoranduszi időszak
Miről lesz szó? Videó tartalom elemzés (VCA) leegyszerűsített működése Kültéri védelem Közúthálózat megfigyelés Emberszámlálás
 leegyszerűsített működése Kültéri védelem Közúthálózat megfigyelés Emberszámlálás") Videóanalitikát mindenhova! Princz Adorján Miről lesz szó? Videó tartalom elemzés (VCA) leegyszerűsített működése Kültéri védelem Közúthálózat megfigyelés Emberszámlálás VCA alapú detektorok Videótartalom
Videóanalitikát mindenhova! Princz Adorján Miről lesz szó? Videó tartalom elemzés (VCA) leegyszerűsített működése Kültéri védelem Közúthálózat megfigyelés Emberszámlálás VCA alapú detektorok Videótartalom
TÁMOP 6.1.4. Koragyermekkori (0-7 év) kiemelt projekt
 kiemelt projekt") TÁMOP 6.1.4. Koragyermekkori (0-7 év) kiemelt projekt Kapcsolat a Programmal II. cél: Gyermek alapellátás egységesebbé tétele az esélyegyenlőség javítása érdekében a hozzáférhetőség javításával és a jobb
TÁMOP 6.1.4. Koragyermekkori (0-7 év) kiemelt projekt Kapcsolat a Programmal II. cél: Gyermek alapellátás egységesebbé tétele az esélyegyenlőség javítása érdekében a hozzáférhetőség javításával és a jobb
MISKOLCI EGYETEM GÉPÉSZMÉRNÖKI ÉS INFORMATIKAI KAR MATEMATIKAI INTÉZET SZAKDOLGOZATI TÉMÁK
 SZAKDOLGOZATI TÉMÁK 2018 Fedélzeti kamera alapú helymeghatározó, navigációs algoritmusok vizsgálata és implementálása Témavezető: Dr. Árvai-Homolya Szilvia A drónok mind szélesebb körű elterjedésével,
SZAKDOLGOZATI TÉMÁK 2018 Fedélzeti kamera alapú helymeghatározó, navigációs algoritmusok vizsgálata és implementálása Témavezető: Dr. Árvai-Homolya Szilvia A drónok mind szélesebb körű elterjedésével,
Fine-Grained Network Time Synchronization using Reference Broadcast
 Fine-Grained Network Time Synchronization using Reference Broadcast Ofszet Az indítás óta eltelt idıt mérik Az ofszet változása: skew Az órák sebességének különbsége Oka: Az óra az oszcillátor pontatlanságát
Fine-Grained Network Time Synchronization using Reference Broadcast Ofszet Az indítás óta eltelt idıt mérik Az ofszet változása: skew Az órák sebességének különbsége Oka: Az óra az oszcillátor pontatlanságát
Módszer fejlesztése forró részecskék azonosítására és lokalizálására biztosítéki részecske-analízis céljára
 Módszer fejlesztése forró részecskék azonosítására és lokalizálására biztosítéki részecske-analízis céljára Mácsik Zsuzsanna, Széles Éva MTA, Izotópkutató Intézet, Sugárbiztonsági Osztály XXXV. Sugárvédelmi
Módszer fejlesztése forró részecskék azonosítására és lokalizálására biztosítéki részecske-analízis céljára Mácsik Zsuzsanna, Széles Éva MTA, Izotópkutató Intézet, Sugárbiztonsági Osztály XXXV. Sugárvédelmi
Felhívás okos és innovatív megoldások megvalósítására SMART FACTORY HUB projekt keretében.
 1 A felhívás neve Felhívás okos és innovatív megoldások megvalósítására SMART FACTORY HUB projekt keretében. 2 A felhívás kiírója Pannon Gazdasági Hálózat Egyesület 9027, Győr Gesztenyefa utca 4. az alábbi
1 A felhívás neve Felhívás okos és innovatív megoldások megvalósítására SMART FACTORY HUB projekt keretében. 2 A felhívás kiírója Pannon Gazdasági Hálózat Egyesület 9027, Győr Gesztenyefa utca 4. az alábbi
A 3D mozgáselemző rendszer és alkalmazásának lehetőségei. Dr. Béres Sándor PhD főiskolai docens SZTE JGYPK TSTI
 A 3D mozgáselemző rendszer és alkalmazásának lehetőségei Dr. Béres Sándor PhD főiskolai docens SZTE JGYPK TSTI A 3D mozgáselemzés A teljesítményfokozás talán leghatékonyabb legális, kutatók, edzők, oktatók
A 3D mozgáselemző rendszer és alkalmazásának lehetőségei Dr. Béres Sándor PhD főiskolai docens SZTE JGYPK TSTI A 3D mozgáselemzés A teljesítményfokozás talán leghatékonyabb legális, kutatók, edzők, oktatók
Kísérleti üzemek az élelmiszeriparban alkalmazható fejlett gépgyártás-technológiai megoldások kifejlesztéséhez, kipróbálásához és oktatásához
 1 Nemzeti Workshop Kísérleti üzemek az élelmiszeriparban alkalmazható fejlett gépgyártás-technológiai megoldások kifejlesztéséhez, kipróbálásához és oktatásához Berczeli Attila Campden BRI Magyarország
1 Nemzeti Workshop Kísérleti üzemek az élelmiszeriparban alkalmazható fejlett gépgyártás-technológiai megoldások kifejlesztéséhez, kipróbálásához és oktatásához Berczeli Attila Campden BRI Magyarország
Szárazföldi autonóm mobil robotok vezérlőrendszerének kialakítási lehetőségei. Kucsera Péter ZMNE Doktorandusz
 Szárazföldi autonóm mobil robotok vezérlőrendszerének kialakítási lehetőségei. Kucsera Péter ZMNE Doktorandusz A mobil robot vezérlőrendszerének feladatai Elvégzendő feladat Kommunikáció Vezérlő rendszer
Szárazföldi autonóm mobil robotok vezérlőrendszerének kialakítási lehetőségei. Kucsera Péter ZMNE Doktorandusz A mobil robot vezérlőrendszerének feladatai Elvégzendő feladat Kommunikáció Vezérlő rendszer
MÉRŐ AUTOMATA RENDSZEREK
 Állománynév: software defined 10bevezetes32.pdf Irodalom: Előadók jegyzetei: http://users.itk.ppke.hu/ kolumban/software defined/ MÉRŐ AUTOMATA RENDSZEREK Napjaink legfontosabb trendje: Szoftver definiált
Állománynév: software defined 10bevezetes32.pdf Irodalom: Előadók jegyzetei: http://users.itk.ppke.hu/ kolumban/software defined/ MÉRŐ AUTOMATA RENDSZEREK Napjaink legfontosabb trendje: Szoftver definiált
Érzékelők az autonóm járművekben
 Érzékelők az autonóm járművekben Gáspár Péter Szirányi Tamás 1 Érzékelők Tartalom Motivációs háttér Környezetérzékelés célja Autóipari érzékelők Széria megoldások és ipari trendek 2 Motiváció: A járműipar
Érzékelők az autonóm járművekben Gáspár Péter Szirányi Tamás 1 Érzékelők Tartalom Motivációs háttér Környezetérzékelés célja Autóipari érzékelők Széria megoldások és ipari trendek 2 Motiváció: A járműipar
VTOL UAV. Moduláris fedélzeti elektronika fejlesztése pilóta nélküli repülőgépek számára. Árvai László, Doktorandusz, ZMNE ÁRVAI LÁSZLÓ, ZMNE
 Moduláris fedélzeti elektronika fejlesztése pilóta nélküli repülőgépek számára Árvai László, Doktorandusz, ZMNE Tartalom Fejezet Témakör 1. Fedélzeti elektronika tulajdonságai 2. Modularitás 3. Funkcionális
Moduláris fedélzeti elektronika fejlesztése pilóta nélküli repülőgépek számára Árvai László, Doktorandusz, ZMNE Tartalom Fejezet Témakör 1. Fedélzeti elektronika tulajdonságai 2. Modularitás 3. Funkcionális
ProSeniis projekt. Monos János GE Healthcare
 ProSeniis projekt Monos János GE Healthcare ProSeniis projekt 3 éves, magyar állam által támogatott program GE Healthcare által vezetett, 6 tagú konzorcium neves magyar egyetemekkel és egészségügyi vállalkozásokkal
ProSeniis projekt Monos János GE Healthcare ProSeniis projekt 3 éves, magyar állam által támogatott program GE Healthcare által vezetett, 6 tagú konzorcium neves magyar egyetemekkel és egészségügyi vállalkozásokkal
Hibadetektáló rendszer légtechnikai berendezések számára
 Hibadetektáló rendszer légtechnikai berendezések számára Tudományos Diákköri Konferencia A feladatunk Légtechnikai berendezések Monitorozás Hibadetektálás Újrataníthatóság A megvalósítás Mozgásérzékelő
Hibadetektáló rendszer légtechnikai berendezések számára Tudományos Diákköri Konferencia A feladatunk Légtechnikai berendezések Monitorozás Hibadetektálás Újrataníthatóság A megvalósítás Mozgásérzékelő
nagyoknak kicsiknek SKOLÁBA ISKOLÁBA ISKOLÁBA ISKOLÁ PROGRAMOZÁS ROBOTIKA BEHOZZUK A ZÖLD ENERGIÁKAT AZ OSZTÁLYTERMEKBE
 SKOLÁBA ISKOLÁBA ISKOLÁBA ISKOLÁ PROGRAMOZÁS ROBOTIKA nagyoknak kicsiknek BEHOZZUK A ZÖLD ENERGIÁKAT AZ OSZTÁLYTERMEKBE TUDOMÁNY ÉS TECHNIKA Egyszerű és meghajtott gépek Tudomány Műveltség Matek Kommunikáció
SKOLÁBA ISKOLÁBA ISKOLÁBA ISKOLÁ PROGRAMOZÁS ROBOTIKA nagyoknak kicsiknek BEHOZZUK A ZÖLD ENERGIÁKAT AZ OSZTÁLYTERMEKBE TUDOMÁNY ÉS TECHNIKA Egyszerű és meghajtott gépek Tudomány Műveltség Matek Kommunikáció
CARE. Biztonságos. otthonok idős embereknek CARE. Biztonságos otthonok idős embereknek 2010-09-02. Dr. Vajda Ferenc Egyetemi docens
 CARE Biztonságos CARE Biztonságos otthonok idős embereknek otthonok idős embereknek 2010-09-02 Dr. Vajda Ferenc Egyetemi docens 3D Érzékelés és Mobilrobotika kutatócsoport Budapesti Műszaki és Gazdaságtudományi
CARE Biztonságos CARE Biztonságos otthonok idős embereknek otthonok idős embereknek 2010-09-02 Dr. Vajda Ferenc Egyetemi docens 3D Érzékelés és Mobilrobotika kutatócsoport Budapesti Műszaki és Gazdaságtudományi
Bevezetés a kvantum informatikába és kommunikációba Féléves házi feladat (2013/2014. tavasz)
") Bevezetés a kvantum informatikába és kommunikációba Féléves házi feladat (2013/2014. tavasz) A házi feladatokkal kapcsolatos követelményekről Kapcsolódó határidők: választás: 6. oktatási hét csütörtöki
Bevezetés a kvantum informatikába és kommunikációba Féléves házi feladat (2013/2014. tavasz) A házi feladatokkal kapcsolatos követelményekről Kapcsolódó határidők: választás: 6. oktatási hét csütörtöki
Mezőgazdasági robot fejlesztése és jövőbeli bővíthetősége
 Mezőgazdasági robot fejlesztése és jövőbeli bővíthetősége Tóth Mihály Informatikus és szakigazgatási agrármérnök (BSc) Konzulens: Dr. Szilágyi Róbert 2014.11.14. Az informatika, mint segítő ágazat Az informatika
Mezőgazdasági robot fejlesztése és jövőbeli bővíthetősége Tóth Mihály Informatikus és szakigazgatási agrármérnök (BSc) Konzulens: Dr. Szilágyi Róbert 2014.11.14. Az informatika, mint segítő ágazat Az informatika
CHARACTERIZATION OF PEOPLE
 CONFERENCE ABOUT THE STATUS AND FUTURE OF THE EDUCATIONAL AND R&D SERVICES FOR THE VEHICLE INDUSTRY CHARACTERIZATION OF PEOPLE MOVEMENT BY USING MOBILE CELLULAR INFORMATION László Nádai "Smarter Transport"
CONFERENCE ABOUT THE STATUS AND FUTURE OF THE EDUCATIONAL AND R&D SERVICES FOR THE VEHICLE INDUSTRY CHARACTERIZATION OF PEOPLE MOVEMENT BY USING MOBILE CELLULAR INFORMATION László Nádai "Smarter Transport"
Mérési struktúrák
 Mérési struktúrák 2007.02.19. 1 Mérési struktúrák A mérés művelete: a mérendő jellemző és a szimbólum halmaz közötti leképezés megvalósítása jel- és rendszerelméleti aspektus mérési folyamat: a leképezést
Mérési struktúrák 2007.02.19. 1 Mérési struktúrák A mérés művelete: a mérendő jellemző és a szimbólum halmaz közötti leképezés megvalósítása jel- és rendszerelméleti aspektus mérési folyamat: a leképezést
Vezetéknélküli Érzékelő Hálózatok
 Dr. Kasza Tamás Vezetéknélküli Érzékelő Hálózatok Budapest, 2011. február 16. www.meetthescientist.hu 1 28 Tanulmányok - M.Sc.: - 1994-1999: BME-VIK - 1995-2000: BME-GTK - 1999-2003: BKE - 1997-1998: ELTE-TTK
Dr. Kasza Tamás Vezetéknélküli Érzékelő Hálózatok Budapest, 2011. február 16. www.meetthescientist.hu 1 28 Tanulmányok - M.Sc.: - 1994-1999: BME-VIK - 1995-2000: BME-GTK - 1999-2003: BKE - 1997-1998: ELTE-TTK
Murinkó Gergő
 2018.10.10 Murinkó Gergő P r o f e s s z i o n á l i s K ö z m ű k e r e s ő k 2 - Munkabiztonság - Eltakart értékek védelme - Feltárások felgyorsítása Kérdések és válaszok? - Milyen anyagú cső, milyen
2018.10.10 Murinkó Gergő P r o f e s s z i o n á l i s K ö z m ű k e r e s ő k 2 - Munkabiztonság - Eltakart értékek védelme - Feltárások felgyorsítása Kérdések és válaszok? - Milyen anyagú cső, milyen
Összeállította Horváth László egyetemi tanár
 Óbudai Egyetem Neumann János Informatikai Kar Intelligens Mérnöki Rendszerek Intézet Intelligens Mérnöki Rendszerek Szakirány a Mérnök informatikus alapszakon Összeállította Horváth László Budapest, 2011
Óbudai Egyetem Neumann János Informatikai Kar Intelligens Mérnöki Rendszerek Intézet Intelligens Mérnöki Rendszerek Szakirány a Mérnök informatikus alapszakon Összeállította Horváth László Budapest, 2011
Hát én immár mit válasszak?
 Hát én immár mit válasszak? Az SQI szoftverminőséggel kapcsolatos kutatási projektjei Dr. Balla Katalin 2005.04.15. ~ A környezet ~ Az SQI kutatási-fejlesztési projektjei ~ TST ~ IKKK Miről lesz szó 2005.04.15.
Hát én immár mit válasszak? Az SQI szoftverminőséggel kapcsolatos kutatási projektjei Dr. Balla Katalin 2005.04.15. ~ A környezet ~ Az SQI kutatási-fejlesztési projektjei ~ TST ~ IKKK Miről lesz szó 2005.04.15.
Mérés és adatgyűjtés
 Mérés és adatgyűjtés 5. óra - levelező Mingesz Róbert Szegedi Tudományegyetem 2011. március 18. MA lev - 5. óra Verzió: 1.1 Utolsó frissítés: 2011. április 12. 1/20 Tartalom I 1 Demók 2 Digitális multiméterek
Mérés és adatgyűjtés 5. óra - levelező Mingesz Róbert Szegedi Tudományegyetem 2011. március 18. MA lev - 5. óra Verzió: 1.1 Utolsó frissítés: 2011. április 12. 1/20 Tartalom I 1 Demók 2 Digitális multiméterek
Modern fizika laboratórium
 Modern fizika laboratórium 11. Az I 2 molekula disszociációs energiája Készítette: Hagymási Imre A mérés dátuma: 2007. október 3. A beadás dátuma: 2007. október xx. 1. Bevezetés Ebben a mérésben egy kétatomos
Modern fizika laboratórium 11. Az I 2 molekula disszociációs energiája Készítette: Hagymási Imre A mérés dátuma: 2007. október 3. A beadás dátuma: 2007. október xx. 1. Bevezetés Ebben a mérésben egy kétatomos
Takács Árpád K+F irányok
 Takács Árpád K+F irányok 2016. 06. 09. arpad.takacs@adasworks.com A jövőre tervezünk Az AdasWorks mesterséges intelligencia alapú szoftverterfejlesztéssel és teljes önvezető megoldásokkal forradalmasítja
Takács Árpád K+F irányok 2016. 06. 09. arpad.takacs@adasworks.com A jövőre tervezünk Az AdasWorks mesterséges intelligencia alapú szoftverterfejlesztéssel és teljes önvezető megoldásokkal forradalmasítja
A PPP. a vonatkoztatási rendszer, az elmélet és gyakorlat összefüggése egy Fehérvár környéki kísérleti GNSS-mérés tapasztalatai alapján
 GISopen konferencia, Székesfehérvár, 2017. 04. 11-13. A PPP a vonatkoztatási rendszer, az elmélet és gyakorlat összefüggése egy Fehérvár környéki kísérleti GNSS-mérés tapasztalatai alapján Busics György
GISopen konferencia, Székesfehérvár, 2017. 04. 11-13. A PPP a vonatkoztatási rendszer, az elmélet és gyakorlat összefüggése egy Fehérvár környéki kísérleti GNSS-mérés tapasztalatai alapján Busics György
Korszerű mérési és irányítási módszerek városi közúti közlekedési hálózatban
 Korszerű mérési és irányítási módszerek városi közúti közlekedési hálózatban Dr. Tettamanti Tamás BME Közlekedés- és Járműirányítási Tanszék 2013. november. 13. MTA KTB ünnepi tudományos ülése 1 A közlekedési
Korszerű mérési és irányítási módszerek városi közúti közlekedési hálózatban Dr. Tettamanti Tamás BME Közlekedés- és Járműirányítási Tanszék 2013. november. 13. MTA KTB ünnepi tudományos ülése 1 A közlekedési
Pneumatika az ipari alkalmazásokban
 Pneumatika az ipari alkalmazásokban Manipulátorok Balanszer technika Pneumatikus pozícionálás Anyagmozgatási és Logisztikai Rendszerek Tanszék Manipulátorok - Mechanikai struktúra vagy manipulátor, amely
Pneumatika az ipari alkalmazásokban Manipulátorok Balanszer technika Pneumatikus pozícionálás Anyagmozgatási és Logisztikai Rendszerek Tanszék Manipulátorok - Mechanikai struktúra vagy manipulátor, amely
Gazdálkodási modul. Gazdaságtudományi ismeretek III. Szervezés és logisztika. KÖRNYEZETGAZDÁLKODÁSI MÉRNÖKI MSc TERMÉSZETVÉDELMI MÉRNÖKI MSc
 Gazdálkodási modul Gazdaságtudományi ismeretek III. Szervezés és logisztika KÖRNYEZETGAZDÁLKODÁSI MÉRNÖKI MSc TERMÉSZETVÉDELMI MÉRNÖKI MSc Fejlődési tendenciák a logisztikában 105. lecke A fejlődési tendenciákat
Gazdálkodási modul Gazdaságtudományi ismeretek III. Szervezés és logisztika KÖRNYEZETGAZDÁLKODÁSI MÉRNÖKI MSc TERMÉSZETVÉDELMI MÉRNÖKI MSc Fejlődési tendenciák a logisztikában 105. lecke A fejlődési tendenciákat
Hazai fejlesztésű hibahely behatárolási eljárás tapasztalatai
 Hazai fejlesztésű hibahely behatárolási eljárás tapasztalatai Védelmi és Irányítástechnikai Fórum, Siófok, 2015. 6. 3-4. Dr. Raisz Dávid, docens BME Villamos Energetika Tanszék Villamos Művek és Környezet
Hazai fejlesztésű hibahely behatárolási eljárás tapasztalatai Védelmi és Irányítástechnikai Fórum, Siófok, 2015. 6. 3-4. Dr. Raisz Dávid, docens BME Villamos Energetika Tanszék Villamos Művek és Környezet
ÉRZÉKELŐK ÉS BEAVATKOZÓK II. PÉLDÁK - FELADATOK
 ÉRZÉKELŐK ÉS BEAVATKOZÓK II. PÉLDÁK - FELADATOK Dr. Soumelidis Alexandros 2019.02.06. BME KÖZLEKEDÉSMÉRNÖKI ÉS JÁRMŰMÉRNÖKI KAR 32708-2/2017/INTFIN SZÁMÚ EMMI ÁLTAL TÁMOGATOTT TANANYAG Ball & Plate kísérlet
ÉRZÉKELŐK ÉS BEAVATKOZÓK II. PÉLDÁK - FELADATOK Dr. Soumelidis Alexandros 2019.02.06. BME KÖZLEKEDÉSMÉRNÖKI ÉS JÁRMŰMÉRNÖKI KAR 32708-2/2017/INTFIN SZÁMÚ EMMI ÁLTAL TÁMOGATOTT TANANYAG Ball & Plate kísérlet
Épületenergetika és épületmechatronika
 VILLAMOSMÉRNÖKI ÉS MECHATRONIKAI TNASZÉK MŰSZAKI KAR DEBRECENI EGYETEM Épületenergetika és épületmechatronika DR. SZEMES PÉTER TAMÁS DOCENS FEJÉR MEGYEI KERESKEDELMI ÉS IPARKAMARA 2013.03.28 Tartalom Denzero
VILLAMOSMÉRNÖKI ÉS MECHATRONIKAI TNASZÉK MŰSZAKI KAR DEBRECENI EGYETEM Épületenergetika és épületmechatronika DR. SZEMES PÉTER TAMÁS DOCENS FEJÉR MEGYEI KERESKEDELMI ÉS IPARKAMARA 2013.03.28 Tartalom Denzero
Alter Róbert Báró Csaba Sensor Technologies Kft
 Közúti forgalomelemzés kamerával e_traffic Alter Róbert Báró Csaba Sensor Technologies Kft Előadás témái Cégbemutató Videó analitikai eljárások Forgalomszámláló eszközök összehasonlítása e_traffic forgalomelemző
Közúti forgalomelemzés kamerával e_traffic Alter Róbert Báró Csaba Sensor Technologies Kft Előadás témái Cégbemutató Videó analitikai eljárások Forgalomszámláló eszközök összehasonlítása e_traffic forgalomelemző
Informatika Rendszerek Alapjai
 Informatika Rendszerek Alapjai Dr. Kutor László Alapfogalmak Információ-feldolgozó paradigmák Analóg és digitális rendszerek jellemzői Jelek típusai Átalakítás rendszerek között http://uni-obuda.hu/users/kutor/
Informatika Rendszerek Alapjai Dr. Kutor László Alapfogalmak Információ-feldolgozó paradigmák Analóg és digitális rendszerek jellemzői Jelek típusai Átalakítás rendszerek között http://uni-obuda.hu/users/kutor/
11. Intelligens rendszerek
 SZÉCHENYI ISTVÁN EGYETEM MŰSZAKI TUDOMÁNYI KAR KÖZLEKEDÉSÉPÍTÉSI TANSZÉK KÖZÚTI FORGALOMTECHNIKA 1. Tantárgykód: NGB_ET009_1 11. Intelligens rendszerek Dr. Kálmán László egyetemi adjunktus Győr, 2014.
SZÉCHENYI ISTVÁN EGYETEM MŰSZAKI TUDOMÁNYI KAR KÖZLEKEDÉSÉPÍTÉSI TANSZÉK KÖZÚTI FORGALOMTECHNIKA 1. Tantárgykód: NGB_ET009_1 11. Intelligens rendszerek Dr. Kálmán László egyetemi adjunktus Győr, 2014.
Balatonőszöd, 2013. június 13.
 Balatonőszöd, 2013. június 13. Egy tesztrendszer kiépítése Minőséges mérőláncok beépítése Hibák generálása Költséghatékony HW környezet kialakítása A megvalósított rendszer tesztelése Adatbázis kialakítása
Balatonőszöd, 2013. június 13. Egy tesztrendszer kiépítése Minőséges mérőláncok beépítése Hibák generálása Költséghatékony HW környezet kialakítása A megvalósított rendszer tesztelése Adatbázis kialakítása
Hardverfejlesztések szakosztály kivonatai
 Hardverfejlesztések szakosztály kivonatai Gitár multi-effekt pedál PIC32 mikroprocesszorral Fehér Áron (Sapientia Erdélyi Magyar Tudományegyetem, Automatika és alkalmazott informatika szak, 3. év) dr.
Hardverfejlesztések szakosztály kivonatai Gitár multi-effekt pedál PIC32 mikroprocesszorral Fehér Áron (Sapientia Erdélyi Magyar Tudományegyetem, Automatika és alkalmazott informatika szak, 3. év) dr.
Akusztikus távolság meghatározás a vezeték nélküli szenzor hálózatokban. Előadó: Kincses Zoltán
 Akusztikus távolság meghatározás a vezeték nélküli szenzor hálózatokban Előadó: Kincses Zoltán Bevezetés A mote-ok földrajzi helymeghatározása fontos helymeghatározó rendszerekben érzékelő és jelző alkalmazásokban
Akusztikus távolság meghatározás a vezeték nélküli szenzor hálózatokban Előadó: Kincses Zoltán Bevezetés A mote-ok földrajzi helymeghatározása fontos helymeghatározó rendszerekben érzékelő és jelző alkalmazásokban