Robotino programozása v2.3.2
|
|
|
- Júlia Kozma
- 8 évvel ezelőtt
- Látták:
Átírás

 Lektorálta: Raj")
1 Robotino programozása v2.3.2 II. Robotino Olimpia 2010 II. Mobil Robot Kupa 2010 Írta: Bolla Dániel (BME-VIK) Lektorálta: Raj Levente (BME-MOGI) F

 Egyéb kiegészítők:")
2 Mit tud a Robotino? 2D mozgás bármely irányba Függőleges tengely menti forgás Web-kamera (képfeldolgozás) Vezeték nélküli programozás Infra szenzorok I/O portok (analóg/digitális) Egyéb kiegészítők: NorthStar Gyroscope Lézer-scanner Gripper (megfogó)

3 Robotino View Alprogramok készítése: Menüsor Eszközsor Alprogram fülek Munkaterület Modulok

4 Robotino View Szekvencia megvalósítása: Menüsor Eszközsor Alprogram fülek Szekvenciális eszközök Munkaterület Globális változók

5 Robotino View Modulok

6 Motor objektumok Motor objektumok: Speed set-point Reset position Brake Acceleration beállítani kívánt forgási sebesség motor pozíció nullázása fékezés gyorsulás mértéke Actual velocity Actual position Current [A] aktuális forgási sebesség motor aktuális pozíciója motor aktuális áramfelvétele Minden motorhoz külön objektum tartozik. Ellentétben az 1.7-es verzióval.

7 Motorok közvetlen vezérlése Mozgás előre: VIDEO Forgás jobbra: VIDEO

8 OmniDrive objektum OmniDrive objektum: vx x-irányú sebesség m1 1-es motor fordulatszáma vy y-irányú sebesség m2 2-es motor fordulatszáma omega forgási sebesség m1 3-as motor fordulatszáma Leegyszerűsíti a motorok vezérlését. Komplex mozgások is könnyen megvalósíthatóak vele.

9 OmniDrive objektum Mozgás előre: VIDEO Forgás jobbra: VIDEO

10 OmniDrive objektum Mozgás más irányokba: VIDEO Mozgás köríven: VIDEO

11 Irányítás a ControlPanel objektummal ControlPanel objektum: vx vy omega x-irányú sebesség y-irányú sebesség forgási sebesség Slider objektum: value csúszka állapota

12 Irányítás a Joystick objektummal Joystick / Gamepad hozzáadása:

13 Irányítás a Joystick objektummal Joystick tengelyei: value tengely állapota Joystick gombjai: Minden tengelyhez és minden gombhoz külön objektum tartozik. Ellentétben az 1.7-es verzióval. value gomb értéke
 Length Phi Vector vektor hossza vektor szöge vektor r + φ 0 az előrefelé irányt jelenti.")
14 Vektorműveletek Vektorok megadása Vektor létrehozása x és y koordinátákkal x y x-koordináta y-koordináta y Az x tengely hátulról előre, míg az y tengely jobbról balra irányuló tengelyek. Vector vektor x Vektor létrehozása polár koordinátákkal (szög, hossz) Length Phi Vector vektor hossza vektor szöge vektor r + φ 0 az előrefelé irányt jelenti. A pozitív forgásirány az óramutató járásával ellentétes irányú.

15 Vektorműveletek Vektor felbontása x és y, illetve polár koordinátákra Vektorkorok összegzése, kivonása Vektoriális szorzat, vektorhossz lekérdezése Vektor forgatása Vektorok és skalárok közötti műveletek

16 Vektorműveletek Vektorműveletek használata: y Vektor 1 Vektor 2 Vektor 1+2 Eleforgatott vektor x
 szög, amely irányba a szenzor néz Minden szenzorhoz külön objektum tartozik. Ellentétben az 1.7-es verzióval.")
17 Infra szenzorok (Distance modul) Distance modul: Bumper: Value Heading Távolság arányos jel (minél közelebb van valami a szenzorhoz, annál nagyobb jelet ad ki) szög, amely irányba a szenzor néz Minden szenzorhoz külön objektum tartozik. Ellentétben az 1.7-es verzióval. value Bumper állapota

18 Jel kondicionálás Scale: átskálázás be ki bemenet kimenet Transfer function x y bemenet kimenet Mean filter Input Output bemenet kimenet

19 PassiveAviod Feladat: Menekülés az esetleges ütközések elől. Az ellenkező irányba kell elmozdulni, mint amerre valami akadály van.

20 PassiveAviod értelmezése Minden infra szenzorra szükség van. Infra szenzorok

21 PassiveAviod értelmezése Vektorok létrehozása Infra szenzorok A továbbiakban vektorokkal szeretnénk dolgozni, így az infra-szenzorok jeleiből vektorokat hozunk létre.

22 PassiveAviod értelmezése Vektorok létrehozása Vektorok összegzése Infra szenzorok Minél hosszabb a vektor, annál közelebb van a fal.

23 PassiveAviod értelmezése Vektorok létrehozása Vektorok összegzése Egységvektor létrehozása Infra szenzorok Egyenlőre csak az akadály irányára van szükségünk.
24 PassiveAviod értelmezése Vektorok létrehozása Vektorok összegzése Egységvektor létrehozása Infra szenzorok Vektorhossz meghatározása Minél közelebb vannak az akadályok, annál hosszabb vektort hozunk létre.

25 PassiveAviod értelmezése Vektorok létrehozása Vektorok összegzése Egységvektor létrehozása Vektor elforgatása Infra szenzorok Vektorhossz meghatározása A vektor most az akadály irányába mutat. Nekünk ezzel a vektorral pont ellentétes irányba kell elmozdulnunk.

26 PassiveAviod értelmezése Vektorok létrehozása Vektor felbontása Vektorok összegzése Egységvektor létrehozása Vektor elforgatása Hirtelen mozdulatok kiszűrése Robotino vezérlése Infra szenzorok Vektorhossz meghatározása Ha a vektrot felbontjuk x és y összetevőre, akkor ezekkel az értékekkel közvetlenül vezérelhetjük az omnidrive-ot.

27 Web-kamera képe Webkamera képének megtekintése: Image Kép kimenet

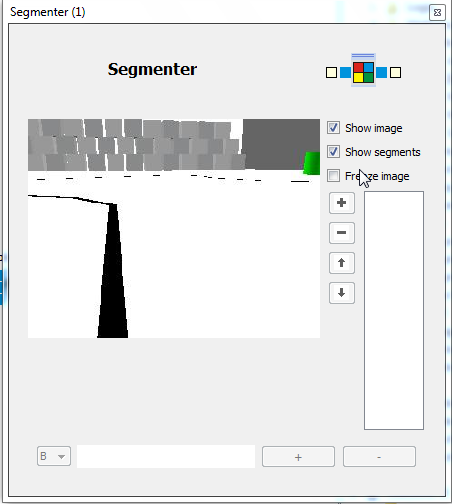
28 Képfeldolgozás Segmenter Modul: Az állatalunk kijelölt színekre bontja a kamera képét. Input Output bemeneti kép szegmentált kép Kép lefagyasztása Szín kijelölése Szín lementése

29 Képfeldolgozás Piros összetevő állítása Zöld összetevő állítása Kék összetevő állítása Fagyasztás megszűntetése
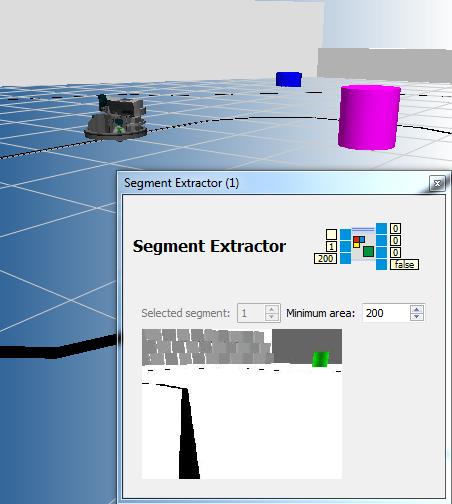
30 Képfeldolgozás Segment extractor: Az adott színszegmensnek a pozícióját adja meg. Input Selected segment Minimum area kép bemenet kereset szegmens száma minimális terület, ami esetén észreveszi a szegmenst x y Area Segment found szegmens súlypontjának x koordinátája szegmens súlypontjának y koordinátája szegmens területe találtunk szegmenst? A (0;0) koordináta a kép bal-felső sarkában található. Ellentétben az 1.7-es verzióval.
31 Képfeldolgozás VIDEO VIDEO

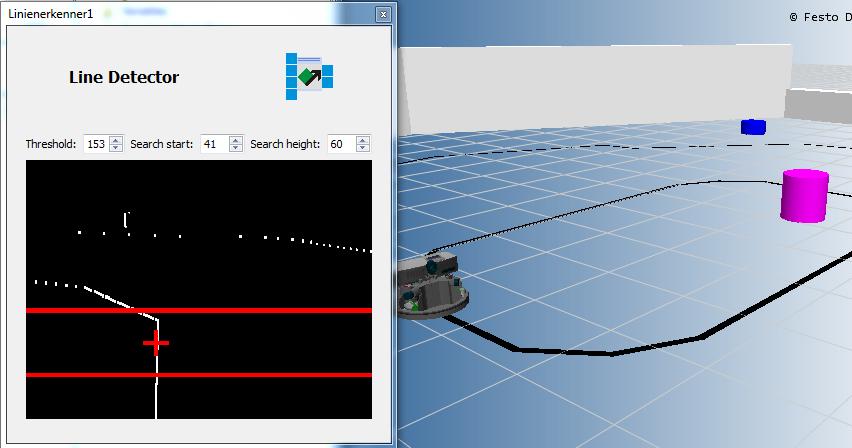
32 Vonalkövetés LineDetector modul: Input kép bemenet Threshold Search start Search height vonalkereső érzékenysége Honnan kezdje a keresést? Vizsgált terület magassága x Line Found szegmens súlypontjának x koordinátája Találtunk vonalat? Az x=0 a kép baloldalán található. Ellentétben az 1.7-es verzióval.
33 Vonalkövetés VIDEO


34 Vonalkövetés Vonalkövetés kiegészítő szenzorokkal: Digitális bemenet Analóg bemenet Digitális kimenet Relés kimenet Induktív Szenzor AI Optikai Szenzor DI

35 Vonalkövetés Vonalkövetés optikai szenzorokkal:
 Globális változók Globális változó olvasása Globális változó")
36 Globális változók Globális változók használata: adatok átvitele programmodulok között alprogramok kilépési feltételei (lásd később) Globális változók Globális változó olvasása Globális változó írása
 Ugró utasítás (goto, jump) Szekvenciális eszközök: Párhuzamos ágak: Lépés beszúrása az aktuális fölé Lépés beszúrása az aktuális alá Alternatív ág beszúrása az")
37 Szekvenciális programvégrehajtás Szekvenciális építőmodulok: Inicializáló rész, Ez indul el bekapcsoláskor. Kilépési feltétel (lásd később) Alternatív ágak: Alprogram blokkja. Kilépési feltétel (lásd később) Ugró utasítás (goto, jump) Szekvenciális eszközök: Párhuzamos ágak: Lépés beszúrása az aktuális fölé Lépés beszúrása az aktuális alá Alternatív ág beszúrása az aktuálistól balra Alternatív ág beszúrása az aktuálistól jobbra Párhuzamos ág beszúrása az aktuálistól balra Párhuzamos ág beszúrása az aktuálistól jobbra Ugrás a megadott lépésre
38 Szekvenciális programvégrehajtás Kilépési feltételek globális változók alapján: Konstans feltételek: - true (egyszer lefut, és kilép az alprogramból) - false (sosem lép ki az alprogramból) Logikai feltételek (mint c-ben): - És kapcsolat: && - Vagy kapcsolat: II - Negálás:! Matematikai: - Összeadás, kivonás, szorzás, osztás: +, -, *, / - Kisebb, nagyobb, egyenlő, nem egyenlő: <, >, ==,!= Összetettebb kifejezések is lehetségesek: Pl.: ( (a==1) && (b<=3) ) c
 Ág beszúrása bonyolultabb szerkezetekben: Érdemes két kilépési feltétel vízszintes jelölő vonalát kijelölni (egyszerre több dolog kijelölése a shift gomb")
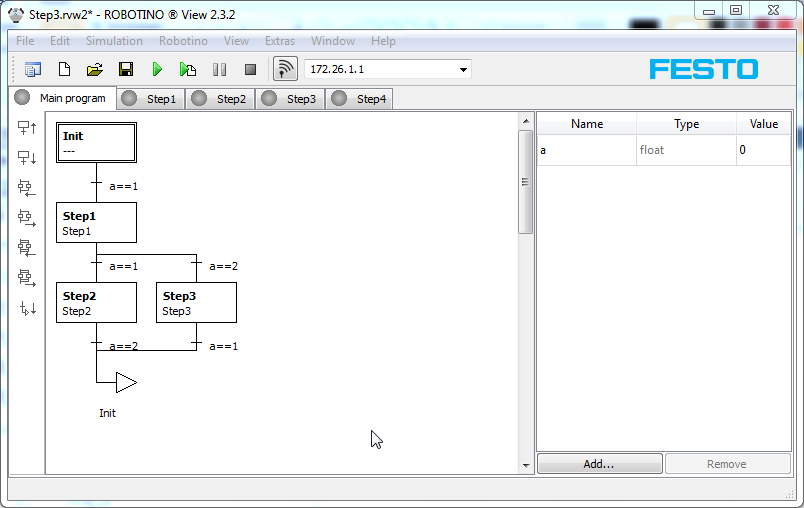
39 Szekvenciális programvégrehajtás Alternatív ágak különlegességei: Mindig csak az egyik ágban van programfutás Az ágak prioritás balra nő (ha egyszerre két ágnál teljesül a kilépési feltétel, akkor a leg baloldalabbi ágban lévő alprogram fut le) Ág beszúrása bonyolultabb szerkezetekben: Érdemes két kilépési feltétel vízszintes jelölő vonalát kijelölni (egyszerre több dolog kijelölése a shift gomb nyomva tartása mellett lehetséges), amikhez az alternatív ágat akarjuk kapcsolni, és ezután az új ág beszúrására kattintani. Egyes esetekben segéd lépéseket kell beiktatni, amit ezután ki lehet törölni (lásd: példa).?
40 Szekvenciális programvégrehajtás
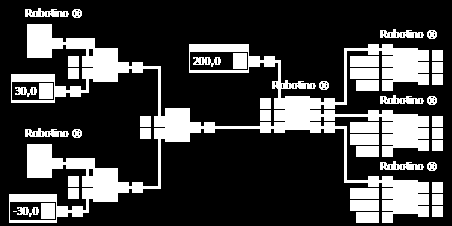
41 Szekvenciális programvégrehajtás Párhuzamos ágak különlegességei: Mindegyik ágban lévő program fut Ág beszúrása bonyolultabb szerkezetekben: Párhuzamos ágak esetén lépéseket kell kijelölni. Több lépés kijelölése itt is a shift gombbal lehetséges. Az alábbi példánál a 9-es és 6-os lépést jelöltük ki, majd utána szúrtunk be balra egy új párhuzamos ágat, ami az összes többi alprogrammal párhuzamosan fog futni.
42 Szekvenciális programvégrehajtás Biztonsági program: bumper hatására leáll Elhelyezünk egy párhuzamos ágat, ami bumper hatására a bumper nevű globális változót 1-be állítja (Step7). A bumper változó hatására kilépünk a programokból. (minden kilépési feltételbe be kell rakni, hogy bumper! Step7:
 Robotino Ellenőrző jel Érzékelő Szabályozó")
43 Egyszerű szabályozás Tartsuk a Robotino-t az előtte lévő faltól 5 cm-re! Alapjel + - Rendelkező jel Szabályozó (Programunk) Robotino Ellenőrző jel Érzékelő Szabályozó (Programunk) Robotino Érzékelő Alapjel


44 Kapcsolódás a Robotino-hoz Robotino adatainak leolvasása: IP-cím: SSID: Robotino Kapcsolódás: WLAN bekapcsolása Csatlakozás az AP-hoz Windows XP Windows Vista / 7
 Aktuális alprogram futtatása (Kézi leállítás szükséges!) 2.")
45 Program futtatása a PC-n 1. Kapcsolódás a Robotino Accespoint-jához (Wifi szükséges) 3.Szekvenciális program futtatása (3.) Aktuális alprogram futtatása (Kézi leállítás szükséges!) 2. Kapcsolódás 1. IP-cím beírása
 Ha lassú a kommunikáció, próbáljunk meg portot")

46 RobotinoSim használata Kijelölő eszköz Port Robotino (kijelölve) Ha lassú a kommunikáció, próbáljunk meg portot váltani. Pl.: 8081-re A SIM-ben és a View-ban is át kell állítani! IP cím (mindig ez kell) Port (ugyanaz, mint a SIM-ben) IP_cím:Port
47 Köszönjük a figyelmet! Kérdések? Játékra fel!
Robotino programozása
 Robotino programozása Bolla Dániel (BME-VIK) 2009 - FESTO Mit tud a Robotino? 2D mozgás bármely irányba Függőleges tengely menti forgás Web-kamera (képfeldolgozás) Vezeték nélküli programozás Infra szenzorok
Robotino programozása Bolla Dániel (BME-VIK) 2009 - FESTO Mit tud a Robotino? 2D mozgás bármely irányba Függőleges tengely menti forgás Web-kamera (képfeldolgozás) Vezeték nélküli programozás Infra szenzorok
A LEGO Mindstorms EV3 programozása
 A LEGO Mindstorms EV3 programozása 1. A fejlesztői környezet bemutatása 12. Az MPU6050 gyorsulás- és szögsebességmérő szenzor Orosz Péter 1 Felhasznált irodalom LEGO MINDSTORMS EV3: Felhasználói útmutató
A LEGO Mindstorms EV3 programozása 1. A fejlesztői környezet bemutatása 12. Az MPU6050 gyorsulás- és szögsebességmérő szenzor Orosz Péter 1 Felhasznált irodalom LEGO MINDSTORMS EV3: Felhasználói útmutató
Mechatronika segédlet 3. gyakorlat
 Mechatronika segédlet 3. gyakorlat 2017. február 20. Tartalom Vadai Gergely, Faragó Dénes Feladatleírás... 2 Fogaskerék... 2 Nézetváltás 3D modellezéshez... 2 Könnyítés megvalósítása... 2 A fogaskerék
Mechatronika segédlet 3. gyakorlat 2017. február 20. Tartalom Vadai Gergely, Faragó Dénes Feladatleírás... 2 Fogaskerék... 2 Nézetváltás 3D modellezéshez... 2 Könnyítés megvalósítása... 2 A fogaskerék
Összeállította: dr. Leitold Adrien egyetemi docens
 Az R 3 tér geometriája Összeállította: dr. Leitold Adrien egyetemi docens 2008.09.08. 1 Vektorok Vektor: irányított szakasz Jel.: a, a, a, AB, Jellemzői: irány, hosszúság, (abszolút érték) jel.: a Speciális
Az R 3 tér geometriája Összeállította: dr. Leitold Adrien egyetemi docens 2008.09.08. 1 Vektorok Vektor: irányított szakasz Jel.: a, a, a, AB, Jellemzői: irány, hosszúság, (abszolút érték) jel.: a Speciális
17. előadás: Vektorok a térben
 17. előadás: Vektorok a térben Szabó Szilárd A vektor fogalma A mai előadásban n 1 tetszőleges egész szám lehet, de az egyszerűség kedvéért a képletek az n = 2 esetben szerepelnek. Vektorok: rendezett
17. előadás: Vektorok a térben Szabó Szilárd A vektor fogalma A mai előadásban n 1 tetszőleges egész szám lehet, de az egyszerűség kedvéért a képletek az n = 2 esetben szerepelnek. Vektorok: rendezett
LEGO robotok. IV. rész
 A homályosságot úgy küszöböljük ki, hogy sok kockát exponálunk ugyanarról az objektumról, minél többet, annál jobb, és a képfeldolgozás során ezeket egy speciális asztroszoft segítségével kiátlagoljuk,
A homályosságot úgy küszöböljük ki, hogy sok kockát exponálunk ugyanarról az objektumról, minél többet, annál jobb, és a képfeldolgozás során ezeket egy speciális asztroszoft segítségével kiátlagoljuk,
C. Szerelési és beállítási útmutató
 C. Szerelési és beállítási útmutató Glystro összeszerelési útmutató I Karakterisztika II Vigyázat! A motor kifejezetten függöny mozgatásához van tervezve: [1]. Soha ne használja vízszintes vagy dőlt síkú
C. Szerelési és beállítási útmutató Glystro összeszerelési útmutató I Karakterisztika II Vigyázat! A motor kifejezetten függöny mozgatásához van tervezve: [1]. Soha ne használja vízszintes vagy dőlt síkú
A ROBOTIKA ALKALMAZÁSÁNAK LEHETŐSÉGEI A HAD- ÉS BIZTONSÁGTECHNIKAI MÉRNÖK KÉPZÉSBEN
 IV. Évfolyam 1. szám - 2009. március Tibenszkyné Fórika Krisztina Zrínyi Miklós Nemzetvédelmi Egyetem tibenszkyne.forika.krisztina@zmne.hu A ROBOTIKA ALKALMAZÁSÁNAK LEHETŐSÉGEI A HAD- ÉS BIZTONSÁGTECHNIKAI
IV. Évfolyam 1. szám - 2009. március Tibenszkyné Fórika Krisztina Zrínyi Miklós Nemzetvédelmi Egyetem tibenszkyne.forika.krisztina@zmne.hu A ROBOTIKA ALKALMAZÁSÁNAK LEHETŐSÉGEI A HAD- ÉS BIZTONSÁGTECHNIKAI
ködös határ (félreértés, hiba)
") probléma formálisan specifikált: valós világ (domain) (hibás eredmény) ködös határ (félreértés, hiba) formális világ (megoldás) A szoftver fejlesztőnek meg kell értenie a felhasználó problémáját. A specifikáció
probléma formálisan specifikált: valós világ (domain) (hibás eredmény) ködös határ (félreértés, hiba) formális világ (megoldás) A szoftver fejlesztőnek meg kell értenie a felhasználó problémáját. A specifikáció
Easton420. Automata Telefon hangrögzítő. V 6.0 Telepítése Windows XP rendszerre
 Easton420 Automata Telefon hangrögzítő V 6.0 Telepítése Windows XP rendszerre A mellékelt telepítő CD-t helyezze a számítógép lemez olvasó egységbe, várja meg az automatikus indítási képernyőt. Majd válassza
Easton420 Automata Telefon hangrögzítő V 6.0 Telepítése Windows XP rendszerre A mellékelt telepítő CD-t helyezze a számítógép lemez olvasó egységbe, várja meg az automatikus indítási képernyőt. Majd válassza
Az RM 01 típusú PUMA robot programozása
 Az RM 01 típusú PUMA robot programozása Dr. Szalay Tibor Operációs rendszer parancsok Parancsok a pontok meghatározásához CHANGE (pont) A parancs a robot vezérelt pontjának koordináta értékeit jeleníti
Az RM 01 típusú PUMA robot programozása Dr. Szalay Tibor Operációs rendszer parancsok Parancsok a pontok meghatározásához CHANGE (pont) A parancs a robot vezérelt pontjának koordináta értékeit jeleníti
Az M A vektor tehát a három vektori szorzat előjelhelyes összege:
 1. feladat Határozza meg a T i támadáspontú F i erőrendszer nyomatékát az A pontra. T 1 ( 3, 0, 5 ) T 1 ( 0, 4, 5 ) T 1 ( 3, 4, 2 ) F 1 = 0 i + 300 j + 0 k F 2 = 0 i 100 j 400 k F 3 = 100 i 100 j + 500
1. feladat Határozza meg a T i támadáspontú F i erőrendszer nyomatékát az A pontra. T 1 ( 3, 0, 5 ) T 1 ( 0, 4, 5 ) T 1 ( 3, 4, 2 ) F 1 = 0 i + 300 j + 0 k F 2 = 0 i 100 j 400 k F 3 = 100 i 100 j + 500
Mechatronika segédlet 10. gyakorlat
 Mechatronika segédlet 10. gyakorlat 2017. április 21. Tartalom Vadai Gergely, Faragó Dénes Feladatleírás... 1 simrobot... 2 Paraméterei... 2 Visszatérési értéke... 2 Kód... 2 simrobotmdl... 3 robotsen.mdl...
Mechatronika segédlet 10. gyakorlat 2017. április 21. Tartalom Vadai Gergely, Faragó Dénes Feladatleírás... 1 simrobot... 2 Paraméterei... 2 Visszatérési értéke... 2 Kód... 2 simrobotmdl... 3 robotsen.mdl...
Mesh generálás. IványiPéter
 Mesh generálás IványiPéter drview Grafikus program MDF file-ok szerkesztéséhez. A mesh generáló program bemenetét itt szerkesztjük meg. http://www.hexahedron.hu/personal/peteri/sx/index.html Pont létrehozásához
Mesh generálás IványiPéter drview Grafikus program MDF file-ok szerkesztéséhez. A mesh generáló program bemenetét itt szerkesztjük meg. http://www.hexahedron.hu/personal/peteri/sx/index.html Pont létrehozásához
Egész számok értelmezése, összehasonlítása
 Egész számok értelmezése, összehasonlítása Mindennapi életünkben jelenlevő ellentétes mennyiségek kifejezésére a természetes számok halmazát (0; 1; 2; 3; 4; 5 ) ki kellett egészítenünk. 0 +1, +2, +3 +
Egész számok értelmezése, összehasonlítása Mindennapi életünkben jelenlevő ellentétes mennyiségek kifejezésére a természetes számok halmazát (0; 1; 2; 3; 4; 5 ) ki kellett egészítenünk. 0 +1, +2, +3 +
A MATLAB alapjai. Kezdő lépések. Változók. Aktuális mappa Parancs ablak. Előzmények. Részei. Atomerőművek üzemtana
 A MATLAB alapjai Kezdő lépések - Matlab Promt: >> - Help: >> help sqrt >> doc sqrt - Kilépés: >> quit >> exit >> Futó script leállítása: >> ctrl+c - Változók listásása >> who >> whos - Változók törlése
A MATLAB alapjai Kezdő lépések - Matlab Promt: >> - Help: >> help sqrt >> doc sqrt - Kilépés: >> quit >> exit >> Futó script leállítása: >> ctrl+c - Változók listásása >> who >> whos - Változók törlése
Neumann János Számítógép-tudományi Társaság Programozás, robotprogramozás szakkör Három félév 3 * 8 foglalkozás
 Neumann János Számítógép-tudományi Társaság Programozás, robotprogramozás szakkör Három félév 3 * 8 foglalkozás Első félév A modul időtartama: A modul célja: A modul tartalma: 8 foglalkozás, alkalmanként
Neumann János Számítógép-tudományi Társaság Programozás, robotprogramozás szakkör Három félév 3 * 8 foglalkozás Első félév A modul időtartama: A modul célja: A modul tartalma: 8 foglalkozás, alkalmanként
Matematika A1a Analízis
 B U D A P E S T I M Ű S Z A K I M A T E M A T I K A É S G A Z D A S Á G T U D O M Á N Y I I N T É Z E T E G Y E T E M Matematika A1a Analízis BMETE90AX00 Vektorok StKis, EIC 2019-02-12 Wettl Ferenc ALGEBRA
B U D A P E S T I M Ű S Z A K I M A T E M A T I K A É S G A Z D A S Á G T U D O M Á N Y I I N T É Z E T E G Y E T E M Matematika A1a Analízis BMETE90AX00 Vektorok StKis, EIC 2019-02-12 Wettl Ferenc ALGEBRA
Kimenetek száma Kimenet Szoftveres beállítás Bank funkció Típus. Nincs Nincs H8PS-8BP 16 H8PS-16BP 32 H8PS-32BP. Felbontás Kábelhossz Típus
 H8PS Digitális pozícionáló Kiváltja a mechanikus pozícionálókat Kompatibilis az abszolút kódadókkal Maximális fordulat: 1600 1/min Nagyméretû LCD-kijelzõ 8 / 16 / 32 db tranzisztoros kimenet 96 x 96 mm-es
H8PS Digitális pozícionáló Kiváltja a mechanikus pozícionálókat Kompatibilis az abszolút kódadókkal Maximális fordulat: 1600 1/min Nagyméretû LCD-kijelzõ 8 / 16 / 32 db tranzisztoros kimenet 96 x 96 mm-es
Occam 1. Készítette: Szabó Éva
 Occam 1. Készítette: Szabó Éva Párhuzamos programozás Egyes folyamatok (processzek) párhuzamosan futnak. Több processzor -> tényleges párhuzamosság Egy processzor -> Időosztásos szimuláció Folyamatok közötti
Occam 1. Készítette: Szabó Éva Párhuzamos programozás Egyes folyamatok (processzek) párhuzamosan futnak. Több processzor -> tényleges párhuzamosság Egy processzor -> Időosztásos szimuláció Folyamatok közötti
Yottacontrol I/O modulok beállítási segédlet
 Yottacontrol I/O modulok beállítási segédlet : +36 1 236 0427 +36 1 236 0428 Fax: +36 1 236 0430 www.dialcomp.hu dial@dialcomp.hu 1131 Budapest, Kámfor u.31. 1558 Budapest, Pf. 7 Tartalomjegyzék Bevezető...
Yottacontrol I/O modulok beállítási segédlet : +36 1 236 0427 +36 1 236 0428 Fax: +36 1 236 0430 www.dialcomp.hu dial@dialcomp.hu 1131 Budapest, Kámfor u.31. 1558 Budapest, Pf. 7 Tartalomjegyzék Bevezető...
Vektorgeometria (1) First Prev Next Last Go Back Full Screen Close Quit
 First Prev Next Last Go Back Full Screen Close Quit") Vektorgeometria (1) First Prev Next Last Go Back Full Screen Close Quit 1. A térbeli irányított szakaszokat vektoroknak hívjuk. Két vektort egyenlőnek tekintünk, ha párhuzamos eltolással fedésbe hozhatók.
Vektorgeometria (1) First Prev Next Last Go Back Full Screen Close Quit 1. A térbeli irányított szakaszokat vektoroknak hívjuk. Két vektort egyenlőnek tekintünk, ha párhuzamos eltolással fedésbe hozhatók.
8. A paraméterek leírása
 Paraméter leírások 123. A paraméterek leírása A következő oldalakon a paraméter leírások találhatók, egyedi azonosítószámuk (ID) szerint sorba rendezve. Az sötétített azonosító számoknál (pl. 41 Motorpotenciométer
Paraméter leírások 123. A paraméterek leírása A következő oldalakon a paraméter leírások találhatók, egyedi azonosítószámuk (ID) szerint sorba rendezve. Az sötétített azonosító számoknál (pl. 41 Motorpotenciométer
2000 Szentendre, Bükköspart 74 WWW.MEVISOR.HU. MeviMR 3XC magnetorezisztív járműérzékelő szenzor
 MeviMR 3XC Magnetorezisztív járműérzékelő szenzor MeviMR3XC járműérzékelő szenzor - 3 dimenzióban érzékeli a közelében megjelenő vastömeget. - Könnyű telepíthetőség. Nincs szükség az aszfalt felvágására,
MeviMR 3XC Magnetorezisztív járműérzékelő szenzor MeviMR3XC járműérzékelő szenzor - 3 dimenzióban érzékeli a közelében megjelenő vastömeget. - Könnyű telepíthetőség. Nincs szükség az aszfalt felvágására,
3.5.2 Laborgyakorlat: IP címek és a hálózati kommunikáció
 3.5.2 Laborgyakorlat: IP címek és a hálózati kommunikáció Célkitűzések Egyszerű egyenrangú csomópontokból álló hálózat építése, és a fizikai kapcsolat ellenőrzése. Különböző IP-cím beállításoknak a hálózati
3.5.2 Laborgyakorlat: IP címek és a hálózati kommunikáció Célkitűzések Egyszerű egyenrangú csomópontokból álló hálózat építése, és a fizikai kapcsolat ellenőrzése. Különböző IP-cím beállításoknak a hálózati
Szélkövetés: Ehhez az üzemmódhoz a PR3-as paraméter értékét 0-ra kell állítani.
 Szélkövető v4 1 Bekapcsolást követően a szélkövető elektronika kijelzőjén a SZEL42 felirat jelenik meg néhány másodpercre, majd ezt követően pedig az ALAP felirat (Az Auto/Kézi kapcsoló lekapcsolva). A
Szélkövető v4 1 Bekapcsolást követően a szélkövető elektronika kijelzőjén a SZEL42 felirat jelenik meg néhány másodpercre, majd ezt követően pedig az ALAP felirat (Az Auto/Kézi kapcsoló lekapcsolva). A
Regresszió számítás. Tartalomjegyzék: GeoEasy V2.05+ Geodéziai Kommunikációs Program
 Regresszió számítás GeoEasy V2.05+ Geodéziai Kommunikációs Program DigiKom Kft. 2006-2010 Tartalomjegyzék: Egyenes x változik Egyenes y változik Egyenes y és x változik Kör Sík z változik Sík y, x és z
Regresszió számítás GeoEasy V2.05+ Geodéziai Kommunikációs Program DigiKom Kft. 2006-2010 Tartalomjegyzék: Egyenes x változik Egyenes y változik Egyenes y és x változik Kör Sík z változik Sík y, x és z
CPA 601, CPA 602, CPA 603
 CPA 601, CPA 602, CPA 603 Infravörös távvezérlő rendszer Felhasználói kézikönyv Olvassa el a teljes kezelési útmutatót a használatba helyezés előtt! A helytelen használat visszafordíthatatlan károkat okozhat!
CPA 601, CPA 602, CPA 603 Infravörös távvezérlő rendszer Felhasználói kézikönyv Olvassa el a teljes kezelési útmutatót a használatba helyezés előtt! A helytelen használat visszafordíthatatlan károkat okozhat!
Matematika (mesterképzés)
") Matematika (mesterképzés) Környezet- és Településmérnököknek Debreceni Egyetem Műszaki Kar, Műszaki Alaptárgyi Tanszék Vinczéné Varga A. Környezet- és Településmérnököknek 2016/2017/I 1 / 29 Lineáris tér,
Matematika (mesterképzés) Környezet- és Településmérnököknek Debreceni Egyetem Műszaki Kar, Műszaki Alaptárgyi Tanszék Vinczéné Varga A. Környezet- és Településmérnököknek 2016/2017/I 1 / 29 Lineáris tér,
AutoCAD 2000H rajzszerkesztés
 Jakubek Lajos AutoCAD 2000H rajzszerkesztés Gyakorlati útmutató, mintapéldák 1. Előszó A számítógéppel segített rajzolás és tervezés egyik leghatékonyabb rendszere az AutoCAD. A CAD felhasználók kb. 70
Jakubek Lajos AutoCAD 2000H rajzszerkesztés Gyakorlati útmutató, mintapéldák 1. Előszó A számítógéppel segített rajzolás és tervezés egyik leghatékonyabb rendszere az AutoCAD. A CAD felhasználók kb. 70
Dinnyeválogató v2.0. Típus: Dinnyeválogató v2.0 Program: Dinnye2 Gyártási év: 2011 Sorozatszám: 001-1-
 Dinnyeválogató v2.0 Típus: Dinnyeválogató v2.0 Program: Dinnye2 Gyártási év: 2011 Sorozatszám: 001-1- Omron K3HB-VLC elektronika illesztése mérlegcellához I. A HBM PW10A/50 mérlegcella csatlakoztatása
Dinnyeválogató v2.0 Típus: Dinnyeválogató v2.0 Program: Dinnye2 Gyártási év: 2011 Sorozatszám: 001-1- Omron K3HB-VLC elektronika illesztése mérlegcellához I. A HBM PW10A/50 mérlegcella csatlakoztatása
2018/2019. Matematika 10.K
 Egész éves dolgozat szükséges felszerelés: toll, ceruza, radír, vonalzó, körző, számológép, függvénytáblázat 2 órás, 4 jegyet ér 2019. május 27-31. héten Aki hiányzik, a következő héten írja meg, e nélkül
Egész éves dolgozat szükséges felszerelés: toll, ceruza, radír, vonalzó, körző, számológép, függvénytáblázat 2 órás, 4 jegyet ér 2019. május 27-31. héten Aki hiányzik, a következő héten írja meg, e nélkül
{ } x x x y 1. MATEMATIKAI ÖSSZEFOGLALÓ. ( ) ( ) ( ) (a szorzás eredménye:vektor) 1.1. Vektorok közötti műveletek
 ( ) ( ) (a szorzás eredménye:vektor) 1.1. Vektorok közötti műveletek") 1. MAEMAIKAI ÖSSZEFOGLALÓ 1.1. Vektorok közötti műveletek Azok a fizikai mennyiségek, melyeknek nagyságukon kívül irányuk is van, vektoroknak nevezzük. A vektort egyértelműen megadhatjuk a hosszával és
1. MAEMAIKAI ÖSSZEFOGLALÓ 1.1. Vektorok közötti műveletek Azok a fizikai mennyiségek, melyeknek nagyságukon kívül irányuk is van, vektoroknak nevezzük. A vektort egyértelműen megadhatjuk a hosszával és
Programozható logikai vezérlõk
 BUDAPESTI MÛSZAKI EGYETEM KÖZLEKEDÉSMÉRNÖKI KAR KÖZLEKEDÉSAUTOMATIKAI TANSZÉK Programozható logikai vezérlõk Segédlet az Irányítástechnika I. c. tárgyhoz Összeállította: Szabó Géza egyetemi tanársegéd
BUDAPESTI MÛSZAKI EGYETEM KÖZLEKEDÉSMÉRNÖKI KAR KÖZLEKEDÉSAUTOMATIKAI TANSZÉK Programozható logikai vezérlõk Segédlet az Irányítástechnika I. c. tárgyhoz Összeállította: Szabó Géza egyetemi tanársegéd
FIGYELMEZTETÉS! : Az eszközben lévő optikai modul segítségével lehetőség van a sugarak +/- 90 vízszintes és a +/- 5 függőleges irányú állítására!
 INFRASOROMPÓ NR40TX/NR80TX 1. A biztonságos telepítéshez Ez a telepítési útmutató információkkal ellátott és alapvető telepítési veszélyeket tartalmaz ennek az eszköznek a biztonsági módjában és a karbantartásakor
INFRASOROMPÓ NR40TX/NR80TX 1. A biztonságos telepítéshez Ez a telepítési útmutató információkkal ellátott és alapvető telepítési veszélyeket tartalmaz ennek az eszköznek a biztonsági módjában és a karbantartásakor
GOKI GQ-8505A 4 CSATORNÁS KÉPOSZTÓ. Felhasználói kézikönyv
 GOKI GQ-8505A 4 CSATORNÁS KÉPOSZTÓ Felhasználói kézikönyv A dokumentáció a DELTON KFT. szellemi tulajdona, ezért annak változtatása jogi következményeket vonhat maga után. A fordításból, illetve a nyomdai
GOKI GQ-8505A 4 CSATORNÁS KÉPOSZTÓ Felhasználói kézikönyv A dokumentáció a DELTON KFT. szellemi tulajdona, ezért annak változtatása jogi következményeket vonhat maga után. A fordításból, illetve a nyomdai
7400 Kaposvár, Pázmány P. u. 17. OM 034164 TANMENET. Modul: 0919-06. Osztály: Heti óraszám: Hetek száma: 32. P. h.
 EÖTVÖS LORÁND MŰSZAKI SZAKKÖZÉPISKOLA, SZAKISKOLA ÉS KOLLÉGIUM 7400 Kaposvár, Pázmány P. u. 17. OM 034164 TANMENET Tantárgy: Számítógép alkalmazása az elektrotechnikában Modul: 0919-06 Osztály: Heti óraszám:
EÖTVÖS LORÁND MŰSZAKI SZAKKÖZÉPISKOLA, SZAKISKOLA ÉS KOLLÉGIUM 7400 Kaposvár, Pázmány P. u. 17. OM 034164 TANMENET Tantárgy: Számítógép alkalmazása az elektrotechnikában Modul: 0919-06 Osztály: Heti óraszám:
MAGYAR. Android 4.0 vagy újabb, vagy ios 5.0 vagy újabb operációs rendszerű készülék. WiFi útválasztó.
 IP kamera Bevezetés: MAGYAR Szem előtt tarthatja tulajdonát és értékeit ezzel a ténylegesen Plug & Play IP kamerával. Könnyen és egyszerűen használatba vehető, nem kell konfigurálni. Az ingyenes ucare
IP kamera Bevezetés: MAGYAR Szem előtt tarthatja tulajdonát és értékeit ezzel a ténylegesen Plug & Play IP kamerával. Könnyen és egyszerűen használatba vehető, nem kell konfigurálni. Az ingyenes ucare
Mechatronika segédlet 2. gyakorlat
 Mechatronika segédlet 2. gyakorlat 2017. február 13. Tartalom Vadai Gergely, Faragó Dénes Feladatleírás... 3 Y-forma kialakítása... 3 Nagyítás... 3 Y forma kialakítása abszolút koordinátákkal... 4 Dinamikus
Mechatronika segédlet 2. gyakorlat 2017. február 13. Tartalom Vadai Gergely, Faragó Dénes Feladatleírás... 3 Y-forma kialakítása... 3 Nagyítás... 3 Y forma kialakítása abszolút koordinátákkal... 4 Dinamikus
Brósch Zoltán (Debreceni Egyetem Kossuth Lajos Gyakorló Gimnáziuma) Megoldások
 Megoldások") Megoldások 1. Tekintsük az alábbi szabályos hatszögben a következő vektorokat: a = AB és b = AF. Add meg az FO, DC, AO, AC, BE, FB, CE, DF vektorok koordinátáit az (a ; b ) koordinátarendszerben! Alkalmazzuk
Megoldások 1. Tekintsük az alábbi szabályos hatszögben a következő vektorokat: a = AB és b = AF. Add meg az FO, DC, AO, AC, BE, FB, CE, DF vektorok koordinátáit az (a ; b ) koordinátarendszerben! Alkalmazzuk
Szenzorok megismerése Érzékelők használata
 Szenzorok megismerése Érzékelők használata Sicz-Mesziár János sicz.mj@gmail.com 2011. április 14. OE-NIK Mi a szenzor? Olyan elem, amely a környezet jellemzőit méri és arról információval szolgál, valamilyen
Szenzorok megismerése Érzékelők használata Sicz-Mesziár János sicz.mj@gmail.com 2011. április 14. OE-NIK Mi a szenzor? Olyan elem, amely a környezet jellemzőit méri és arról információval szolgál, valamilyen
IV. LEGO Robotprogramozó Országos Csapatverseny
 BÁNYAI JÚLIA GIMNÁZIUM - ROBOTIKA CSOPORT Tel.: 76/481-474 (+36 20 479 8460) Fax.: 76/486-942 web: http://www.banyai-kkt.sulinet.hu/robotika e-mail: robotika.bjg@gmail.com IV. LEGO Robotprogramozó Országos
BÁNYAI JÚLIA GIMNÁZIUM - ROBOTIKA CSOPORT Tel.: 76/481-474 (+36 20 479 8460) Fax.: 76/486-942 web: http://www.banyai-kkt.sulinet.hu/robotika e-mail: robotika.bjg@gmail.com IV. LEGO Robotprogramozó Országos
Rövid útmutató P2P IP kamerákhoz
 HU Rövid útmutató P2P IP kamerákhoz CIKKSZÁM: CR728W Köszönjük, hogy az általunk forgalmazott terméket választotta! A rövid útmutató segítségével az alapbeállítások végezhetők el IP kamerájához. További
HU Rövid útmutató P2P IP kamerákhoz CIKKSZÁM: CR728W Köszönjük, hogy az általunk forgalmazott terméket választotta! A rövid útmutató segítségével az alapbeállítások végezhetők el IP kamerájához. További
QGIS Gyakorló. 1. kép. A vektor réteg (grassland.shp).
.") QGIS Gyakorló Verzió: 1.7 Wroclaw Cím: Műveletek az attribútum táblával Minta fájl letöltése innen: https://www.dropbox.com/link/17.oxt9ziogfh?k=54ff982063bac43be40bf263d9cf45ef A vektoros adatmodell számos
QGIS Gyakorló Verzió: 1.7 Wroclaw Cím: Műveletek az attribútum táblával Minta fájl letöltése innen: https://www.dropbox.com/link/17.oxt9ziogfh?k=54ff982063bac43be40bf263d9cf45ef A vektoros adatmodell számos
Koós Dorián 9.B INFORMATIKA
 9.B INFORMATIKA Számítástechnika rövid története. Az elektronikus számítógép kifejlesztése. A Neumann-elv. Információ és adat. A jel. A jelek fajtái (analóg- és digitális jel). Jelhalmazok adatmennyisége.
9.B INFORMATIKA Számítástechnika rövid története. Az elektronikus számítógép kifejlesztése. A Neumann-elv. Információ és adat. A jel. A jelek fajtái (analóg- és digitális jel). Jelhalmazok adatmennyisége.
Tartalomjegyzék... 1 Az alakalmazás letöltése... 2 Regisztráció... 3 Kapcsolódás (helyi vezérlés):... 4
:... 4") Tartalomjegyzék Tartalomjegyzék... 1 Az alakalmazás letöltése... 2 Regisztráció... 3 Kapcsolódás (helyi vezérlés):... 4 Kapcsolódás vezeték nélküli routerrel (távoli vezérlés)... 5 Android:... 5 ios:...
Tartalomjegyzék Tartalomjegyzék... 1 Az alakalmazás letöltése... 2 Regisztráció... 3 Kapcsolódás (helyi vezérlés):... 4 Kapcsolódás vezeték nélküli routerrel (távoli vezérlés)... 5 Android:... 5 ios:...
O ( 0, 0, 0 ) A ( 4, 0, 0 ) B ( 4, 3, 0 ) C ( 0, 3, 0 ) D ( 4, 0, 5 ) E ( 4, 3, 5 ) F ( 0, 3, 5 ) G ( 0, 0, 5 )
 A ( 4, 0, 0 ) B ( 4, 3, 0 ) C ( 0, 3, 0 ) D ( 4, 0, 5 ) E ( 4, 3, 5 ) F ( 0, 3, 5 ) G ( 0, 0, 5 )") 1. feladat Írjuk föl a következő vektorokat! AC, BF, BG, DF, BD, AG, GB Írjuk föl ezen vektorok egységvektorát is! a=3 m b= 4 m c= m Írjuk föl az egyes pontok koordinátáit: O ( 0, 0, 0 ) A ( 4, 0, 0 )
1. feladat Írjuk föl a következő vektorokat! AC, BF, BG, DF, BD, AG, GB Írjuk föl ezen vektorok egységvektorát is! a=3 m b= 4 m c= m Írjuk föl az egyes pontok koordinátáit: O ( 0, 0, 0 ) A ( 4, 0, 0 )
Példák 04 4a Négyzet megmunkálása kontúrkövetéssel
 4a Négyzet megmunkálása kontúrkövetéssel 0 BEGIN PGM 4a MM program kezdete 3 TOOL CALL 10 Z S1500 F500 szerszám hívása (T10), fõorsó tengelyének kijelölése (Z) fordulatszám és elõtolás megadása 4 L Z+50
4a Négyzet megmunkálása kontúrkövetéssel 0 BEGIN PGM 4a MM program kezdete 3 TOOL CALL 10 Z S1500 F500 szerszám hívása (T10), fõorsó tengelyének kijelölése (Z) fordulatszám és elõtolás megadása 4 L Z+50
www.metroman.hu Felhasználói kézikönyv CIKKSZÁM: M070704L + C120W Installálás és beüzemelés előtt figyelmesen olvassa el!
 www.metroman.hu VEZETÉK NÉLKÜLI 7 LCD TFT SZÍNES MEGFIGYELŐ RENDSZER Felhasználói kézikönyv CIKKSZÁM: M070704L + C120W Installálás és beüzemelés előtt figyelmesen olvassa el! Köszönjük, hogy az általunk
www.metroman.hu VEZETÉK NÉLKÜLI 7 LCD TFT SZÍNES MEGFIGYELŐ RENDSZER Felhasználói kézikönyv CIKKSZÁM: M070704L + C120W Installálás és beüzemelés előtt figyelmesen olvassa el! Köszönjük, hogy az általunk
UJJLENYOMAT OLVASÓ. Kezelői Kézikönyv
 UJJLENYOMAT OLVASÓ Kezelői Kézikönyv 2 Funkció leírása Belépés programozási módba MESTER kód megváltoztatása Új felhasználói ujjlenyomat hozzáadása Felhasználói ujjlenyomat törlése F1/F2-S egyszerűsített
UJJLENYOMAT OLVASÓ Kezelői Kézikönyv 2 Funkció leírása Belépés programozási módba MESTER kód megváltoztatása Új felhasználói ujjlenyomat hozzáadása Felhasználói ujjlenyomat törlése F1/F2-S egyszerűsített
Szárazföldi autonóm mobil robotok vezérlőrendszerének kialakítási lehetőségei. Kucsera Péter ZMNE Doktorandusz
 Szárazföldi autonóm mobil robotok vezérlőrendszerének kialakítási lehetőségei. Kucsera Péter ZMNE Doktorandusz A mobil robot vezérlőrendszerének feladatai Elvégzendő feladat Kommunikáció Vezérlő rendszer
Szárazföldi autonóm mobil robotok vezérlőrendszerének kialakítási lehetőségei. Kucsera Péter ZMNE Doktorandusz A mobil robot vezérlőrendszerének feladatai Elvégzendő feladat Kommunikáció Vezérlő rendszer
Méréselmélet és mérőrendszerek
 Méréselmélet és mérőrendszerek 6. ELŐADÁS KÉSZÍTETTE: DR. FÜVESI VIKTOR 2016. 10. Mai témáink o A hiba fogalma o Méréshatár és mérési tartomány M é r é s i h i b a o A hiba megadása o A hiba eredete o
Méréselmélet és mérőrendszerek 6. ELŐADÁS KÉSZÍTETTE: DR. FÜVESI VIKTOR 2016. 10. Mai témáink o A hiba fogalma o Méréshatár és mérési tartomány M é r é s i h i b a o A hiba megadása o A hiba eredete o
C2RF Többzónás programozható vezeték nélküli digitális szobatermosztát
 Többzónás programozható vezeték nélküli digitális szobatermosztát Termékjellemzők: 3. 4. 5. 6. 7. 8. 9. 10. 1 Kijelezhető hőmérséklet tartomány: 0 C - 40 C (0,1 C lépésekben) Hőmérséklet állítási tartomány:
Többzónás programozható vezeték nélküli digitális szobatermosztát Termékjellemzők: 3. 4. 5. 6. 7. 8. 9. 10. 1 Kijelezhető hőmérséklet tartomány: 0 C - 40 C (0,1 C lépésekben) Hőmérséklet állítási tartomány:
EGY ABLAK - GEOMETRIAI PROBLÉMA
 EGY ABLAK - GEOMETRIAI PROBLÉMA Írta: Hajdu Endre A számítógépemhez tartozó két hangfal egy-egy négyzet keresztmetszetű hasáb hely - szűke miatt az ablakpárkányon van elhelyezve (. ábra).. ábra Hogy az
EGY ABLAK - GEOMETRIAI PROBLÉMA Írta: Hajdu Endre A számítógépemhez tartozó két hangfal egy-egy négyzet keresztmetszetű hasáb hely - szűke miatt az ablakpárkányon van elhelyezve (. ábra).. ábra Hogy az
1. fejezet: Bevezetés. 2. fejezet: Első lépések
 1. fejezet: Bevezetés A Media Player 100 olyan digitális médialejátszó, amely USB memóriához és kártyaolvasókhoz egyaránt csatlakoztatható. Az otthoni szórakoztatóközpontra csatlakozik, és lehetővé teszi
1. fejezet: Bevezetés A Media Player 100 olyan digitális médialejátszó, amely USB memóriához és kártyaolvasókhoz egyaránt csatlakoztatható. Az otthoni szórakoztatóközpontra csatlakozik, és lehetővé teszi
KIBŐVÍTETT RUGALMAS AUTOMATIZÁLÁS
 KIBŐVÍTETT RUGALMAS AUTOMATIZÁLÁS ZEN-C4 nagyobb rugalmasság RS-485 kommunikációval Kínálatunk kommunikációs típussal bővült. Így már lehetősége van több ZEN egység hálózati környezetbe csatlakoztatására.
KIBŐVÍTETT RUGALMAS AUTOMATIZÁLÁS ZEN-C4 nagyobb rugalmasság RS-485 kommunikációval Kínálatunk kommunikációs típussal bővült. Így már lehetősége van több ZEN egység hálózati környezetbe csatlakoztatására.
Foscam IP kamera mozgás érzékelésének beállítása az FI9826W segítségével
 ONLINECAMERA - Nagy Látószög, WiFi, PoE, NVR, Infra, Memóriakártya támogatás webhelyen lett közzétéve (https://onlinecamera.net) Címlap > Foscam IP kamera mozgás érzékelésének beállítása az FI9826W segítségével
ONLINECAMERA - Nagy Látószög, WiFi, PoE, NVR, Infra, Memóriakártya támogatás webhelyen lett közzétéve (https://onlinecamera.net) Címlap > Foscam IP kamera mozgás érzékelésének beállítása az FI9826W segítségével
ABB Teach Pendant programozás segédlet
 ABB Teach Pendant programozás segédlet Készítette: Gyöngyösi Balázs Kiadja a Robert Bosch Mechatronikai Intézeti Tanszék Miskolc, 2017. Tartalomjegyzék Tartalomjegyzék... 1 1. Teach Pendant és az érintőképernyő
ABB Teach Pendant programozás segédlet Készítette: Gyöngyösi Balázs Kiadja a Robert Bosch Mechatronikai Intézeti Tanszék Miskolc, 2017. Tartalomjegyzék Tartalomjegyzék... 1 1. Teach Pendant és az érintőképernyő
Gate Control okostelefon-alkalmazás
 Gate Control okostelefon-alkalmazás GSM Gate Control Pro 20/1000 modulokhoz HASZNÁLATI ÚTMUTATÓ v1.1.1.0 és újabb alkalmazásverzióhoz Dokumentumverzió: v1.5 2016.05.18 Termék rövid leírása A GSM Gate Control
Gate Control okostelefon-alkalmazás GSM Gate Control Pro 20/1000 modulokhoz HASZNÁLATI ÚTMUTATÓ v1.1.1.0 és újabb alkalmazásverzióhoz Dokumentumverzió: v1.5 2016.05.18 Termék rövid leírása A GSM Gate Control
SR mini PLC Modbus illesztő modul. Modul beállítása Bemeneti pontok kiosztása főmodul esetén Bemeneti pontok címkiosztása kiegészítő modul esetében
 SR mini PLC Modbus illesztő modul Modul beállítása Bemeneti pontok kiosztása főmodul esetén Bemeneti pontok címkiosztása kiegészítő modul esetében Kimeneti pontok címkiosztása főmodul esetében, olvasásra
SR mini PLC Modbus illesztő modul Modul beállítása Bemeneti pontok kiosztása főmodul esetén Bemeneti pontok címkiosztása kiegészítő modul esetében Kimeneti pontok címkiosztása főmodul esetében, olvasásra
3. Gyors útmutató 4. Garanciakártya
 A csomag tartalma 1. Prestigio webkamera főegység 2. Alkalmazás szoftver CD Használatvétel 3. Gyors útmutató 4. Garanciakártya 1. Kapcsolja be a PC-t, vagy notebookot. 2. Dugja be az USB csatolót a PC,
A csomag tartalma 1. Prestigio webkamera főegység 2. Alkalmazás szoftver CD Használatvétel 3. Gyors útmutató 4. Garanciakártya 1. Kapcsolja be a PC-t, vagy notebookot. 2. Dugja be az USB csatolót a PC,
 FP2110 UJJLENYOMT-OLVSÓ Kezelői és szerelői útmutató Ez az ujjlenyomat-olvasó egység a legmodernebb technológiára épülő, nagy felbontású ujjlenyomat szenzort használ, melynek köszönhetően kiváló tulajdonságokkal
FP2110 UJJLENYOMT-OLVSÓ Kezelői és szerelői útmutató Ez az ujjlenyomat-olvasó egység a legmodernebb technológiára épülő, nagy felbontású ujjlenyomat szenzort használ, melynek köszönhetően kiváló tulajdonságokkal
USB I/O kártya. 12 relés kimeneti csatornával, 8 digitális bemenettel (TTL) és 8 választható bemenettel, mely analóg illetve TTL módban használható.
 és 8 választható bemenettel, mely analóg illetve TTL módban használható.") USB I/O kártya 12 relés kimeneti csatornával, 8 digitális bemenettel (TTL) és 8 választható bemenettel, mely analóg illetve TTL módban használható. Műszaki adatok: - Tápfeszültség: 12V DC - Áramfelvétel:
USB I/O kártya 12 relés kimeneti csatornával, 8 digitális bemenettel (TTL) és 8 választható bemenettel, mely analóg illetve TTL módban használható. Műszaki adatok: - Tápfeszültség: 12V DC - Áramfelvétel:
Láthatósági kérdések
 Láthatósági kérdések Láthatósági algoritmusok Adott térbeli objektum és adott nézőpont esetén el kell döntenünk, hogy mi látható az adott alakzatból a nézőpontból, vagy irányából nézve. Az algoritmusok
Láthatósági kérdések Láthatósági algoritmusok Adott térbeli objektum és adott nézőpont esetén el kell döntenünk, hogy mi látható az adott alakzatból a nézőpontból, vagy irányából nézve. Az algoritmusok
Vektorok összeadása, kivonása, szorzás számmal, koordináták
 Vektorok összeadása, kivonása, szorzás számmal, koordináták 1. Mik lesznek a P (3, 4, 8) pont C (3, 7, 2) pontra vonatkozó tükörképének a koordinátái? 2. Egy szabályos hatszög középpontja K (4, 1, 4),
Vektorok összeadása, kivonása, szorzás számmal, koordináták 1. Mik lesznek a P (3, 4, 8) pont C (3, 7, 2) pontra vonatkozó tükörképének a koordinátái? 2. Egy szabályos hatszög középpontja K (4, 1, 4),
Vodafone DSL Easy Box beállítása
 A böngészőt indítsd el és a címhez írd be a következőt: http://192.168.2.1/ A felületen a jobb felső sarokban át lehet váltani a nyelvet angolra (alapértelmezett nyelv a német). 1 Ha minden sikeres, akkor
A böngészőt indítsd el és a címhez írd be a következőt: http://192.168.2.1/ A felületen a jobb felső sarokban át lehet váltani a nyelvet angolra (alapértelmezett nyelv a német). 1 Ha minden sikeres, akkor
UC300-5LPT. USB CNC mozgásvezérlő MACH3 programhoz. Használati utasítás. Plugin verzió: V1.024
 Használati utasítás UC300-5LPT USB CNC mozgásvezérlő MACH3 programhoz Plugin verzió: V1.024 P olgardidesign Email: info@polgardidesign.hu Web: www.polgardidesign.hu 2013.07.29. UC300-5LPT rendeltetése:
Használati utasítás UC300-5LPT USB CNC mozgásvezérlő MACH3 programhoz Plugin verzió: V1.024 P olgardidesign Email: info@polgardidesign.hu Web: www.polgardidesign.hu 2013.07.29. UC300-5LPT rendeltetése:
1 csűrő 1 csűrő 2 magassági 2 magassági 3 gáz 3 gáz 4 oldalkormány 4 oldalkormány 5 Robot üzemmód 5 csűrő
 RC csatlakozók A csatlakozók kiosztása. Figyelem, a Gnd (föld, fekete) tüskéi felül vannak! RC input RC output 1 2 3 4 5 1 2 3 4 5 SP Gnd 5V Signal A robot 5 tel (RC input) és 5 tel (RC output) rendelkezik.
RC csatlakozók A csatlakozók kiosztása. Figyelem, a Gnd (föld, fekete) tüskéi felül vannak! RC input RC output 1 2 3 4 5 1 2 3 4 5 SP Gnd 5V Signal A robot 5 tel (RC input) és 5 tel (RC output) rendelkezik.
Wi-Fi karóra kamera használati utasítás - CW-Y30
 Wi-Fi karóra kamera használati utasítás - CW-Y30 Az Y-30 karóra kamera maximum 1280x720 pixeles felbontás mellett alkalmas videó felvételek rögzítésére, valamint azok élő megtekintésére mobiltelefonon
Wi-Fi karóra kamera használati utasítás - CW-Y30 Az Y-30 karóra kamera maximum 1280x720 pixeles felbontás mellett alkalmas videó felvételek rögzítésére, valamint azok élő megtekintésére mobiltelefonon
Skaláris szorzat: a b cos, ahol α a két vektor által bezárt szög.
 1 Összeadás: Legyen a (7; 3) és b (- 2; 4), akkor az összegük a + b (7 + (-2); 3 + 4) = (5; 7) Kivonás: Legyen a (7; 3) és b (- 2; 4), akkor a különbségük a b (7 - (-2); 3-4)=(9; - 1) Valós számmal való
1 Összeadás: Legyen a (7; 3) és b (- 2; 4), akkor az összegük a + b (7 + (-2); 3 + 4) = (5; 7) Kivonás: Legyen a (7; 3) és b (- 2; 4), akkor a különbségük a b (7 - (-2); 3-4)=(9; - 1) Valós számmal való
Választó lekérdezés létrehozása
 Választó lekérdezés létrehozása A választó lekérdezés egy vagy több rekordforrásból származó adatokat jelenít meg. A választó lekérdezések a táblák, illetve az adatbázis tartalmát nem változtatják meg,
Választó lekérdezés létrehozása A választó lekérdezés egy vagy több rekordforrásból származó adatokat jelenít meg. A választó lekérdezések a táblák, illetve az adatbázis tartalmát nem változtatják meg,
Vektoralgebra feladatlap 2018 január 20.
 1. Adott az ABCD tetraéder, határozzuk meg: a) AB + BD + DC b) AD + CB + DC c) AB + BC + DA + CD Vektoralgebra feladatlap 018 január 0.. Adott az ABCD tetraéder. Igazoljuk, hogy AD + BC = BD + AC, majd
1. Adott az ABCD tetraéder, határozzuk meg: a) AB + BD + DC b) AD + CB + DC c) AB + BC + DA + CD Vektoralgebra feladatlap 018 január 0.. Adott az ABCD tetraéder. Igazoljuk, hogy AD + BC = BD + AC, majd
SYS700-A Digitális szabályozó és vezérlõ modul DDC rendszerelemek, DIALOG-III család. Terméktámogatás:
 DDC rendszerelemek, DIALOG-III család KIVITEL ALKALMAZÁS A SYS00-A a Dialog-III készülékcsalád analóg jelek kezelésére alkalmas tagja, amely kifejezetten épületgépészeti szabályozási és vezérlési feladatok
DDC rendszerelemek, DIALOG-III család KIVITEL ALKALMAZÁS A SYS00-A a Dialog-III készülékcsalád analóg jelek kezelésére alkalmas tagja, amely kifejezetten épületgépészeti szabályozási és vezérlési feladatok
PLC Versenyfeladat. XIV. Országos Irányítástechnikai Programozó Verseny Budapest, március Összeállította az EvoPro Kft.
 PLC Versenyfeladat XIV. Országos Irányítástechnikai Programozó Verseny Budapest, 2008. március 19-21. Összeállította az EvoPro Kft. Általános bemutatás A feladatban szereplő eszköz egy 8x8 képpontos LED-mátrix
PLC Versenyfeladat XIV. Országos Irányítástechnikai Programozó Verseny Budapest, 2008. március 19-21. Összeállította az EvoPro Kft. Általános bemutatás A feladatban szereplő eszköz egy 8x8 képpontos LED-mátrix
Keresztmetszet másodrendű nyomatékainak meghatározása
 BUDAPEST MŰSZAK ÉS GAZDASÁGTUDOMÁNY EGYETEM Keresztmetszet másodrendű nyomatékainak meghatározása Segédlet a Szilárdságtan c tárgy házi feladatához Készítette: Lehotzky Dávid Budapest, 205 február 28 ábra
BUDAPEST MŰSZAK ÉS GAZDASÁGTUDOMÁNY EGYETEM Keresztmetszet másodrendű nyomatékainak meghatározása Segédlet a Szilárdságtan c tárgy házi feladatához Készítette: Lehotzky Dávid Budapest, 205 február 28 ábra
Mechatronika segédlet 11. gyakorlat
 Mechatronika segédlet 11. gyakorlat 2017. április 23. Tartalom Vadai Gergely, Faragó Dénes Feladatleírás... 2 Konstansok helyettesítése függvénnyel... 2 Megoldás... 2 Irányítás... 3 Megoldás... 4 maxspeed
Mechatronika segédlet 11. gyakorlat 2017. április 23. Tartalom Vadai Gergely, Faragó Dénes Feladatleírás... 2 Konstansok helyettesítése függvénnyel... 2 Megoldás... 2 Irányítás... 3 Megoldás... 4 maxspeed
18. Szövegszerkesztők
 18. Szövegszerkesztők A szövegszerkesztés olyan számítógépes művelet, amelynek során később nyomtatásban megjelenő szövegegységeket, dokumentumokat hozunk létre, majd azokat papírra kinyomtatjuk. A különböző
18. Szövegszerkesztők A szövegszerkesztés olyan számítógépes művelet, amelynek során később nyomtatásban megjelenő szövegegységeket, dokumentumokat hozunk létre, majd azokat papírra kinyomtatjuk. A különböző
Oktatás. WiFi hálózati kapcsolat beállítása Windows XP és Windows 7-es számítógépeken. SZTE Egyetemi Számítóközpont
 Oktatás WiFi hálózati kapcsolat beállítása Windows XP és Windows 7-es számítógépeken SZTE Egyetemi Számítóközpont WLAN kapcsolat beállítása 1 Tartalom Windows XP... 2 Tanúsítvány telepítése... 2 WPA2 védett
Oktatás WiFi hálózati kapcsolat beállítása Windows XP és Windows 7-es számítógépeken SZTE Egyetemi Számítóközpont WLAN kapcsolat beállítása 1 Tartalom Windows XP... 2 Tanúsítvány telepítése... 2 WPA2 védett
MateFIZIKA: Pörgés, forgás, csavarodás (Vektorok és axiálvektorok a fizikában)
") MateFIZIKA: Pörgés, forgás, csavarodás (Vektorok és axiálvektorok a fizikában) Tasnádi Tamás 1 2015. április 17. 1 BME, Mat. Int., Analízis Tsz. Tartalom Vektorok és axiálvektorok Forgómozgás, pörgettyűk
MateFIZIKA: Pörgés, forgás, csavarodás (Vektorok és axiálvektorok a fizikában) Tasnádi Tamás 1 2015. április 17. 1 BME, Mat. Int., Analízis Tsz. Tartalom Vektorok és axiálvektorok Forgómozgás, pörgettyűk
QGIS szerkesztések ( verzió) Összeállította: dr. Siki Zoltán verzióra aktualizálta: Jáky András
 Összeállította: dr. Siki Zoltán verzióra aktualizálta: Jáky András") QGIS szerkesztések (2.18.3 verzió) Összeállította: dr. Siki Zoltán 2.18.3. verzióra aktualizálta: Jáky András (jakyandras@gmail.com) A QGIS számtalan vektorszerkesztési műveletet biztosít. Tolerancia beállítások
QGIS szerkesztések (2.18.3 verzió) Összeállította: dr. Siki Zoltán 2.18.3. verzióra aktualizálta: Jáky András (jakyandras@gmail.com) A QGIS számtalan vektorszerkesztési műveletet biztosít. Tolerancia beállítások
A csillagképek története és látnivalói február 14. Bevezetés: Az alapvető égi mozgások
 A csillagképek története és látnivalói 2018. február 14. Bevezetés: Az alapvető égi mozgások A csillagok látszólagos mozgása A Föld kb. 24 óra alatt megfordul a tengelye körül a földi megfigyelő számára
A csillagképek története és látnivalói 2018. február 14. Bevezetés: Az alapvető égi mozgások A csillagok látszólagos mozgása A Föld kb. 24 óra alatt megfordul a tengelye körül a földi megfigyelő számára
A MATLAB alapjai. Kezdő lépések. Változók. Aktuális mappa Parancs ablak. Előzmények. Részei
 A MATLAB alapjai Atomerőművek üzemtanának fizikai alapjai - 2016. 03. 04. Papp Ildikó Kezdő lépések - Matlab Promt: >> - Help: >> help sqrt >> doc sqrt - Kilépés: >> quit >> exit - Változók listásása >>
A MATLAB alapjai Atomerőművek üzemtanának fizikai alapjai - 2016. 03. 04. Papp Ildikó Kezdő lépések - Matlab Promt: >> - Help: >> help sqrt >> doc sqrt - Kilépés: >> quit >> exit - Változók listásása >>
Vigilec Mono. Egyfázisú szivattyú vezérlő és védelmi doboz. I. A csavarok eltávolítása után csúsztassuk felfelé az előlapot a felső állásba (A ábra)
") Vigilec Mono Egyfázisú szivattyú vezérlő és védelmi doboz TECHNOCONSULT Kft. 2092 Budakeszi, Szürkebarát u. 1. T: (23) 457-110 www.technoconsult.hu info@technoconsult.hu Leírás Indító relé egyfázisú felszíni
Vigilec Mono Egyfázisú szivattyú vezérlő és védelmi doboz TECHNOCONSULT Kft. 2092 Budakeszi, Szürkebarát u. 1. T: (23) 457-110 www.technoconsult.hu info@technoconsult.hu Leírás Indító relé egyfázisú felszíni
3.1.5 Laborgyakorlat: Egyszerű egyenrangú hálózat építése
 Otthoni és kisvállalati hálózatok kezelése 3.1.5 Laborgyakorlat: Egyszerű egyenrangú hálózat építése Célkitűzések Egyszerű egyenrangú hálózat tervezése és kiépítése az oktató által biztosított keresztkötésű
Otthoni és kisvállalati hálózatok kezelése 3.1.5 Laborgyakorlat: Egyszerű egyenrangú hálózat építése Célkitűzések Egyszerű egyenrangú hálózat tervezése és kiépítése az oktató által biztosított keresztkötésű
MATEMATIKA TANMENET SZAKKÖZÉPISKOLA 11B OSZTÁLY HETI 4 ÓRA 37 HÉT/ ÖSSZ 148 ÓRA
 MINŐSÉGIRÁNYÍTÁSI ELJÁRÁS MELLÉKLET Tanmenetborító Azonosító: ME-III.1./1 Változatszám: 2 Érvényesség 2013. 09. 01. kezdete: Oldal/összes: 1/5 Fájlnév: ME- III.1.1.Tanmenetborító SZK- DC-2013 MATEMATIKA
MINŐSÉGIRÁNYÍTÁSI ELJÁRÁS MELLÉKLET Tanmenetborító Azonosító: ME-III.1./1 Változatszám: 2 Érvényesség 2013. 09. 01. kezdete: Oldal/összes: 1/5 Fájlnév: ME- III.1.1.Tanmenetborító SZK- DC-2013 MATEMATIKA
SA 03 HEAD kétmotoros vezérlés
 SA03 HEAD vezérlőegység oldal: 1 összes: 5 SA 03 HEAD kétmotoros vezérlés Köszönjük, hogy az általunk forgalmazott, Beninca SA03 típusú vezérlőegységet választotta. A Beninca cég kínálatában található
SA03 HEAD vezérlőegység oldal: 1 összes: 5 SA 03 HEAD kétmotoros vezérlés Köszönjük, hogy az általunk forgalmazott, Beninca SA03 típusú vezérlőegységet választotta. A Beninca cég kínálatában található
Megvalósult Intellio megoldások
 Megvalósult Intellio megoldások IP alapú CCTV rendszerek Magyarországon Rendszer komponensek Az Intellio egy kompakt rendszer Intellio kamerák Intellio szerver(ek) Intellio kliens(ek) Átviteli hálózat
Megvalósult Intellio megoldások IP alapú CCTV rendszerek Magyarországon Rendszer komponensek Az Intellio egy kompakt rendszer Intellio kamerák Intellio szerver(ek) Intellio kliens(ek) Átviteli hálózat
Követelmény az 5. évfolyamon félévkor matematikából
 Követelmény az 5. évfolyamon félévkor matematikából Gondolkodási és megismerési módszerek Néhány elem kiválasztása adott szempont szerint. Néhány elem sorba rendezése, az összes lehetséges sorrend felsorolása.
Követelmény az 5. évfolyamon félévkor matematikából Gondolkodási és megismerési módszerek Néhány elem kiválasztása adott szempont szerint. Néhány elem sorba rendezése, az összes lehetséges sorrend felsorolása.
LEGO robotok. XII. rész
 LEGO robotok XII. rész III.1.22. Változók és konstansok A változó fogalma a matematikában egy értelmezési tartománnyal rendelkező, ebből bármilyen értéket felvehető objektum, melynek értéke logikailag
LEGO robotok XII. rész III.1.22. Változók és konstansok A változó fogalma a matematikában egy értelmezési tartománnyal rendelkező, ebből bármilyen értéket felvehető objektum, melynek értéke logikailag
Vodafone GPRS Kapcsolat létrehozása Win XP alatt a Connect Me használata nélkül. A képek a Win XP Professional angol verziójából származnak
 Vodafone GPRS Kapcsolat létrehozása Win XP alatt a Connect Me használata nélkül A képek a Win XP Professional angol verziójából származnak Start menü Magyar verzió esetén Start menü Kapcsolódás Összes
Vodafone GPRS Kapcsolat létrehozása Win XP alatt a Connect Me használata nélkül A képek a Win XP Professional angol verziójából származnak Start menü Magyar verzió esetén Start menü Kapcsolódás Összes
T2-CNCUSB vezérlő család hardver segédlet
 T2-CNCUSB vezérlő család hardver segédlet CPU5A Kártyaméret: 100x100mm 3 vagy 4 tengelyes interpoláció, max.125 KHz léptetési frekvencia. Szabványos kimenetek (Főorsó BE/KI, Fordulatszáám: PWM / 0-10V,
T2-CNCUSB vezérlő család hardver segédlet CPU5A Kártyaméret: 100x100mm 3 vagy 4 tengelyes interpoláció, max.125 KHz léptetési frekvencia. Szabványos kimenetek (Főorsó BE/KI, Fordulatszáám: PWM / 0-10V,
ASTER motorok. Felszerelési és használati utasítás
 1. oldal ASTER motorok Felszerelési és használati utasítás A leírás fontossági és bonyolultsági sorrendben tartalmazza a készülékre vonatkozó elméleti és gyakorlati ismereteket. A gyakorlati lépések képpel
1. oldal ASTER motorok Felszerelési és használati utasítás A leírás fontossági és bonyolultsági sorrendben tartalmazza a készülékre vonatkozó elméleti és gyakorlati ismereteket. A gyakorlati lépések képpel
KeyLock-23 Digitális kódzár 2 kimenettel, 3 bemenettel
 KeyLock-23 Digitális kódzár 2 kimenettel, 3 bemenettel HU Felhasználói és programozói leírás A kézikönyv tartalmára és a benne leírt berendezésre vonatkozóan a fejlesztő és gyártó fenntartja a változtatás
KeyLock-23 Digitális kódzár 2 kimenettel, 3 bemenettel HU Felhasználói és programozói leírás A kézikönyv tartalmára és a benne leírt berendezésre vonatkozóan a fejlesztő és gyártó fenntartja a változtatás
Matlab Fuzzy Logic Toolbox
 Matlab Fuzzy Logic Toolbox The Future looks Fuzzy Newsweek, May, 28, 1990. A fuzzy irányítási rendszerek vizsgálatára Windows alatt futó Matlab programcsomag szimulációs eszközeit és a Matlab-ra ráépülő
Matlab Fuzzy Logic Toolbox The Future looks Fuzzy Newsweek, May, 28, 1990. A fuzzy irányítási rendszerek vizsgálatára Windows alatt futó Matlab programcsomag szimulációs eszközeit és a Matlab-ra ráépülő
Új műveletek egy háromértékű logikában
 A Magyar Tudomány Napja 2012. Új műveletek egy háromértékű logikában Dr. Szász Gábor és Dr. Gubán Miklós Tartalom A probléma előzményei A hagyományos műveletek Az új műveletek koncepciója Alkalmazási példák
A Magyar Tudomány Napja 2012. Új műveletek egy háromértékű logikában Dr. Szász Gábor és Dr. Gubán Miklós Tartalom A probléma előzményei A hagyományos műveletek Az új műveletek koncepciója Alkalmazási példák
MAGYAR KERESKEDELMI ÉS IPARKAMARA. Országos Szakmai Tanulmányi Verseny. Elődöntő KOMPLEX ÍRÁSBELI FELADATSOR MEGOLDÁSA
 5 52 0 Automatikai technikus MAGYAR KERESKEDELMI IPARKAMARA rszágos Szakmai Tanulmányi Verseny Elődöntő KMPLEX ÍRÁSBELI FELADATSR MEGLDÁSA Szakképesítés: 5 52 0 Automatikai technikus SZVK rendelet száma:
5 52 0 Automatikai technikus MAGYAR KERESKEDELMI IPARKAMARA rszágos Szakmai Tanulmányi Verseny Elődöntő KMPLEX ÍRÁSBELI FELADATSR MEGLDÁSA Szakképesítés: 5 52 0 Automatikai technikus SZVK rendelet száma:
A legjobb ár/érték arányú CCTV rendszer HD technológiával koax kábelen történő adatátvitellel 500m távolságig
 DCA-BV5241 A legjobb ár/érték arányú CCTV rendszer HD technológiával koax kábelen történő adatátvitellel 500m távolságig Az AHD technológia előnyei a hagyományos analóg rendszerhez képest Nagy felbontás
DCA-BV5241 A legjobb ár/érték arányú CCTV rendszer HD technológiával koax kábelen történő adatátvitellel 500m távolságig Az AHD technológia előnyei a hagyományos analóg rendszerhez képest Nagy felbontás
Csőmotor Redőnyhöz Oximo WT motorok
 Csőmotor Redőnyhöz Oximo WT motorok Oximo WT: Automatikus végállás beállítás, motorfejen nem kell végállást állítani Akadályfelismerő funkció Típusok: Cikkszám Hossz L1 Hossz L2 Forgatónyomaték (Nm) Oximo
Csőmotor Redőnyhöz Oximo WT motorok Oximo WT: Automatikus végállás beállítás, motorfejen nem kell végállást állítani Akadályfelismerő funkció Típusok: Cikkszám Hossz L1 Hossz L2 Forgatónyomaték (Nm) Oximo
A tervfeladat sorszáma: 1 A tervfeladat címe: ALU egység 8 regiszterrel és 8 utasítással
 .. A tervfeladat sorszáma: 1 A ALU egység 8 regiszterrel és 8 utasítással Minimálisan az alábbi képességekkel rendelkezzen az ALU 8-bites operandusok Aritmetikai funkciók: összeadás, kivonás, shift, komparálás
.. A tervfeladat sorszáma: 1 A ALU egység 8 regiszterrel és 8 utasítással Minimálisan az alábbi képességekkel rendelkezzen az ALU 8-bites operandusok Aritmetikai funkciók: összeadás, kivonás, shift, komparálás
Digitális óra FULL HD WiFi kamerával
 Digitális óra FULL HD WiFi kamerával Használati útmutató A szállító elérhetősége: SHX Trading s.r.o. V Háji 15, 170 00 Praha 7 Tel: +36 70 290 1480, e-mail: info@spystore.hu 1. oldal 1. Termékleírás 1.
Digitális óra FULL HD WiFi kamerával Használati útmutató A szállító elérhetősége: SHX Trading s.r.o. V Háji 15, 170 00 Praha 7 Tel: +36 70 290 1480, e-mail: info@spystore.hu 1. oldal 1. Termékleírás 1.