SZENZOROK ALKALMAZÁSOKBAN
|
|
|
- Egon Pap
- 6 évvel ezelőtt
- Látták:
Átírás


1 SZENZOROK ALKALMAZÁSOKBAN Géczy Attila, Schön András Utoljára módosítva: Ajánlott irodalom: BOSCH Szenzorok a gépjárművekben Maróti Könyvkereskedés és Könyvkiadó Kft., BUDAPEST UNIVERSITY OF TECHNOLOGY AND ECONOMICS DEPARTMENT OF ELECTRONICS TECHNOLOGY

 a kényelmet a használati értéket (multimédiás rendszerek,")
2 A GÉPJÁRMŰ ÉS AZ ELEKTRONIKUS RENDSZEREK Teljesen mechanikus működésű, elektromos gyújtás Számtalan elektromos/elektronikus, és elektronikusan vezérelt hidraulikus rendszer, valamint szenzor melyek csökkentik a: a károsanyag kibocsátást az üzemanyag fogyasztást növelik: a biztonságot (aktív és passzív biztonság) a kényelmet a használati értéket (multimédiás rendszerek, telematika) 2/86
3 Forrás: MERZER Az autóelektronika megduplázza piaci részesedését Gépkocsi 2000 (10200 ) Gépkocsi 2010 (11000 ) Elektronika Hidraulika Mechanika Elektronika Pneumatika Mechanika Elektronik a Hidraulika Mechanika Elektromos és elektronikus rendszerek részaránya kb (22%) OEM piac ~ 123 milliárd E l e k t r o n i k a Szórakoztató rendszerek Elektronika Hidraulika Mechanika Elektronika Pneumatika Mechanika Elektronika Hidraulika Mechanika 0% Hajtáslánc 40 Komfort 70 Biztonság 100% 0% Hajtáslánc 30 Komfort 60Biztonság85 % % 92% % % % E l e k t r o n i k a Elektronikus rendszerek részaránya kb (35%) OEM piac ~ 270 milliárd E l e k t r o n i k a 92 % Szórakoztató rendszerek 100 % Mechanika Mechanika Mechanika Telematika 3/86
 3 CAN busz 35 vezérlőegység Kb.")
4 MODERN GÉPJÁRMŰ ELEKTROMOS HÁLÓZATA elektromos alkatrész 61 vezérlőegység (ECU) 3 CAN busz 35 vezérlőegység Kb jel 250 CAN üzenet Optikai busz 4/86
5 MIKROELEKTRONIKA RÉSZARÁNYA ,5 2,3 3,8 1,3 2,3 1,5 2,8 0,9 0, ,3 0 Hajtáslánc Alváz Lopásvédelem Karosszéria Utasvédelem Telematika Forrás: Automotive 2004/1-2 5/86
6 ELEKTROMOS-, ELEKTRONIKUS RENDSZEREK PIACI VOLUMENE (MILLIÁRD ) Elektromos rendszerek Szenzorok Elektronikus alkatrészek IC Forrás: Mercer, Fraunhofer Gesellschaft, Bosch 133 Szoftver 6/86
7 ELEKTROMOS-, ELEKTRONIKUS RENDSZEREK MEGHIBÁSODÁSAINAK MEGOSZLÁSA Hardver Szoftver Elektromos-, elektronikus rendszerek Hálózat Szenzor 10 Vezérlőegység Vezérlőegység Forrás: McKinsey 7/86

8 TRENDEK ÉS JÖVŐKÉP 8/86

9 TRENDEK ÉS JÖVŐKÉP 9/86



10 TRENDEK ÉS JÖVŐKÉP SMART vagy AUTONÓM? Google, Audi, Tesla a nagy autógyártók és IT vállaltok a fejlődés útján. SMART: Személygépjármű kiegészítve okos eszközökkel a könnyebb, effektívebb, kényelmesebb használhatóság érdekében. AUTONÓM: képes a saját útjának feltérképezésére, szenzorikus bemeneti adatok alapján. Az alkalmazott rendszere akkor is a megadott úton tartja a járművet, ha a környezeti feltételek változnak. BlueID Bosch 10/86
11 TRENDEK ÉS JÖVŐKÉP AUTONÓM JÁRMŰVEK ELŐNY - Csökkenő vezetői stressz - Csökkenő vezetői költségek - Nem vezetők mobilitása javul - Növekedő biztonság - Növekedő útkapacitás - Javuló parkolási hatékonyság - Javuló üzemanyag-felhasználás - Megosztott járműhasználat HÁTRÁNY - Növekvő fejlesztési és karbantartási költségek - Új veszélyforrások - Biztonsági, magánéleti problémák - Növekedő járműhasználat, környezetszennyezés - Foglalkoztatottság-csökkenés - Csökkenő társadalmi lelkesedés a konvencionális közlekedés felé Todd Litman - Autonomous Vehicle Implementation Predictions (2015) 11/86
12 TRENDEK ÉS JÖVŐKÉP AUTONÓM JÁRMŰVEK (ELŐREJELZÉSEK) Todd Litman - Autonomous Vehicle Implementation Predictions (2015) 12/86
13 TRENDEK ÉS JÖVŐKÉP AUTONÓM JÁRMŰVEK (ELŐREJELZÉSEK) ÁLLOMÁS Magas ár prémiummal elérhető 2020s 2-5% Moderált ár prémiummal elérhető 2030s 20-40% Minimális ár prémiummal elérhető 2040s 40-60% Standard lehetőség az új autókon 2050s % Szaturáció (mindenki, aki szeretné, birtokolja) 2060s? Kötelező minden új autóhoz??? 100% Todd Litman - Autonomous Vehicle Implementation Predictions (2015) 13/86

14 A MÚLT KIHÍVÁSAI 14/86

15 A JELEN KIHÍVÁSAI 15/86
16 A JÖVŐ KIHÍVÁSAI OATMEAL.com 16/86

17 A JÖVŐ KIHÍVÁSAI 2016 Február 14 Google Self Driving Car tömegközlekedési busszal koccant. A Google azóta elismerte a hibát saját rendszerükben lévő félreértést és tanulási időszakot jelölték meg az ütközés okozójának. Hátulról érkező busz az autóban ülő teszter látta a bal visszapillantó tükörben, hogy érkezik a busz, de a busz nem adott elsőbbséget, az autó pedig a sávközéphez igazította magát. Az autó autonóm üzemmódban, 2 mph sebességgel haladt. A busz 15 mph (24 kph) sebességgel haladt. A Google autóban történt kár sem volt igazán jelentős óta 1.3 millió mérföldet (2.1 millió km) tettek meg a Google autói, 17 balesetből eddig mind emberi mulasztás következtében történt. Wired.com 17/86

18 SZENZOROK A GÉPJÁRMŰVEKBEN Egy mai felsőkategóriás gépkocsiban több mint 60 elektromos / elektronikus rendszer és legalább 100 szenzor található. Here.com Rendszer Röv. Szenzorok Rendszer Röv. Szenzorok Távolságtartó DTR 3 Közös nyomócsöves befecsk. CDI 11 Elektronikus Automatikus légkondicionáló AAC 13 sebességváltó ECT 9 Aktív felfüggesztés ABC 12 Napfénytető RCU 7 Guminyomás figyelés TPM 11 Blokkolásgátló ABS 4 Elektronikus stabilitás kontroll ESP 14 Központi zár ZV 3 Tolatóradar PTS 12 Fényszóró állítás LWR 6 18/86
19 MIÉRT NÖVEKSZIK A GÉPJÁRMŰVEKBEN AZ ELEKTROMOS/ELEKTRONIKUS RENDSZEREK RÉSZARÁNYA? Törvényi kötelezettség: emissziós normák betartása Felhasználói igények: biztonság, kényelem, megbízhatóság. Gyártói oldal: egyszerűbb és olcsóbb gyártás, könnyebb szervizelhetőség, csökkenő fejlesztési idő és költségek. Ezeknek a kihívásoknak csak a modern elektromos/elektronikus rendszerekkel felszerelt gépkocsi képes megfelelni. 19/86
20 AZ ELEKTRONIKUS RENDSZEREK RÉSZEGYSÉGEI szenzor (érzékelő), vezérlőegység, aktuátor (beavatkozó egység). Gépjárművekben használt érzékelők: helyzet érzékelők (elmozdulás és szögelfordulás), fordulatszám és sebesség érzékelők, gyorsulás- és rezgés-érzékelők, nyomásérzékelők, áramlásmérők, gázérzékelők, hőmérsékletérzékelők, ultrahang érzékelők, kamerás érzékelők. 20/86
21 MIT VÁRUNK EL EGY SZENZORTÓL? Általános tulajdonságok: mérendő mennyiséggel arányos kimenet, linearitás (ofszet, erősítés), reprodukálhatóság, stabilitás (hőmérséklet,fesz.,idő, stb.), környezeti követelmények (rezgés, hőmérséklet, víz, homok stb.), méret, tömeg. Mérési tulajdonságok: méréshatár, érzékenység, mérési felbontás (zajszint), frekvencia válasz (DC-f max ). Elektromos tulajdonságok: tápfeszültség tartomány, áramfelvétel, kimeneti jel szintje, terhelhetősége, áram-, feszültség kimenet. 21/86
22 ÉRZÉKELŐK OSZTÁLYAI (AUTOMOTIVE) 0 Alap érzékelő. 1 Az érzékelő erősítő, jelformáló elemeket is tartalmaz. 2 Kompenzáló elemeket (pl. érzékenység állítás, határérték túllépés elleni védelem) tartalmazó érzékelők. 3 Kommunikációs képességekkel (A/D átalakító, címazonosító, stb.) rendelkező érzékelők. 4 Öndiagnosztizáló érzékelők (A helyes működést, vagy meghibásodást jelezni képes áramkörök). 5 Önálló elemző és döntési képességekkel rendelkező érzékelők. Forrás: dr. Kutor L. 22/86


23 FELÉPÍTÉS Érzékelő elem Jelfeldolgozó áramkör: erősítő, ofszet-, hőmérséklet kompenzálóés linearizáló áramkör, referencia feszültségforrás, aktívszűrő, órajel generátor, időzítő áramkör, multiplexer, AD illetve DA átalakító, DSP + EEPROM, analóg és digitális kimenet. Tokozás Motorola Két csipes kivitel Analog Devices Egy csipes kivitel 23/86
 SZENZOR HELYE Kimenet (mért érték)")
 Kimenet (mért érték) Szenzor elem Jel")
24 SZENZOR AZ ELEKTRONIKAI RENDSZERBEN MÉRENDŐ PARAMÉTER MÉRŐRENDSZER MEGFIGYELŐ Bemenet (valós érték) SZENZOR HELYE Kimenet (mért érték) Bontsuk ki a mérőrendszert! Bemenet (valós érték) Kimenet (mért érték) Szenzor elem Jel kondicionálás /átalakítás Jelfeldolgozó elem adatmegjelenítés 24/86
25 SZENZOR AZ ELEKTRONIKAI RENDSZERBEN A szenzor által vizsgált jelenségek lehetnek: - Mechanikus mennyiségek - Termikus mennyiségek - Elektrosztatikus / mágneses mennyiségek - Sugárzási mennyiségek - Kémiai mennyiségek - Biológiai mennyiségek A szenzorokat feloszthatjuk: - Generátor típusú: nincs szüksége külső gerjesztőjelre - Modulátor típusú: külső gerjesztőjelre van szüksége a természetből 25/86
26 SZENZOR AZ ELEKTRONIKAI RENDSZERBEN A szenzor a vizsgált értéket vivőjellé alakítja: - Elektromos (gyakori) - Optikai (új trend az utóbbi években - Mechanikai (konvencionális berendezésekben) A mérőrendszer felhasználása: - Mérési elrendezésben (mért érték leolvasására) - Folyamatirányítási elrendezésben (aktuátor, vezérlőjel) Szenzor lehet: aktív/passzív 26/86
27 PASSZÍV ANALÓG SZENZOROK ILLESZTÉSE Egyelemes passzív érzékelő (áramgenerátor) Feszültségosztó típusú passzív érzékelő (fesz.táp) Áramcsatolt passzív érzékelő illesztés Wheatstone hídkapcsolású illesztés (zavarvédett, nagy pontosság) Ref: Lambert Miklós: Szenzorok elmélet és gyakorlat 27/86
28 AKTÍV ANALÓG SZENZOROK ILLESZTÉSE Kis generátorellenállás - magas bemeneti ellenállás; Differősítő, jó KM elnyomással! Aszimmetrikus jelátvitel egyenfeszültséggel Szimmetrikus jelátvitel egyenfeszültséggel Nagy belső ellenállás - minimális bemeneti ellenállás; Jelátvitel egyenárammal Komplex impedancia koaxiális csatolás, impedancia illesztés; Jelátvitel váltakozó feszültséggel Ref: Lambert Miklós: Szenzorok elmélet és gyakorlat 28/86
29 HÁTRÁNYOK ELŐNYÖK DIGITÁLIS SZENZOROK ILLESZTÉSE Soros jeltovábbítás: - Elegendő két vezeték - Modulátor/demodulátor átvitel lehetséges - Hálózatba rendszerezhető Párhuzamos jeltovábbítás: - Gyors - Nem kell szinkronizálás - Plusz bitekkel hibajavítás implementálható - Kódoló algoritmusra van szükség - Szinkronizálni kell a kommunikációt - Zavarérzékenysége magas - Sok vezetékre van szükség - Csatornaáthallás lehetséges - Plusz bitekkel hibajavítás implementálható 29/86
30 JELÁTVITELI MÓDSZEREK: SIMPLEX egyirányú jelátvitel FÉLDUPLEX megosztott egyirányú átvitel DUPLEX kétirányú átvitel Alapsávi átvitel: adott villamos jel, kötött közegben. Általában szimplex. Időosztásos, időmultiplexált megvalósítás lehetséges. Behatárolt sebesség és távolság jellemzi. Vivőhullámú átvitel: Alapsávi mérőjellel (pl. a szenzor mérőjele) vivőhullámot modulálunk. (Később demoduláljuk a feldolgozó egység bemenetén.) Minél szélesebb a vivőhullám frekvenciája, annál nagyobb a sávszélességgel bírunk. 30/86
31 KÓDOLÁSI LEHETŐSÉGEK: Folytonos jeleknél: - AM (amplitúdomoduláció) - FM (frekvenciamoduláció) - PAM (pulzus-amplitúdó moduláció) - QAM (kvadratúramoduláció kvázi együttes fázis- és amplitúdómoduláció) Mintavételezett jeleknél (impulzusokkal moduláljuk a vivőhullámot) - ASK amplitúdóeltolásos-billentyűzés - FSK frekvenciaeltolásos-billentyűzés - PSK fáziseltolásos-billentyűzés - PWM pulzusszélesség-moduláció - PCM pulzuskód-moduláció DIGITÁLIS ESET: Kódmoduláció (nem közvetlen hordozott információ, hanem bitkombinációhoz rendelhető szimbólum impulzuscsoport!) 31/86


 - Terepi buszrendszerekben")

32 SPECIÁLIS JELÁTVITEL (FÉNY) Soros adatátvitel ideális közege - fényhullám. - Nagy sebességű, - km-es távolságok áthidalhatók - EM zavarokkal szemben teljesen biztonságos - Fény/sötétség (100% amplitúdómoduláció) - Terepi buszrendszerekben alkalmazható - ADÓ: LED vagy lézerdióda - VEVŐ: fotodióda, fototranzisztor Átviteli közeg: lézerdióda fotodióda Fénykábel 32/86

33 SPECIÁLIS JELÁTVITEL (RÁDIÓFREKVENCIA) Adatátvitel modulált rádiófrekvenciával történik. Jellemzői: hullámhossz, modulációs mód. Hullámhossz-használat engedélyhez kötött. Ipari átviteli sávok, kommerciális sávok, szabadon felhasználható sávok Rendszertechnikai aspektus: frekvencia pontosság, modulációs módok pontos betartása! Átviteli közeg: levegő, víz (pl. tengeralatti rendszerek) 33/86
 - Nagyobb távolságokba szállítható a jel - A jelszállítás módja határozza meg a kategóriáját, nem a szenzor mag típusa, jellemzői")
34 TÁVADÓK (TRANSDUCER) Speciális rendszertechnikai fogalom. Lényege, hogy az érzékelő kimeneti jele jelátalakítás után, szabványos formátumban továbbítódik. Előnye, főbb jellemzői: - Rendszerbe illeszthető (szabványos) - Nagyobb távolságokba szállítható a jel - A jelszállítás módja határozza meg a kategóriáját, nem a szenzor mag típusa, jellemzői Transducer típusok: - Aktív: átalakítás során feszültséget generál (nincs szükség tápegységre, elemre) - Passzív: külső tápegységre van szüksége az átalakításhoz 34/86
35 ANALÓG TÁVADÓK Egyenfeszültséggel, vagy áramjellel adnak kimeneti információt. Feszültség alapú: bipoláris, unipoláris, 0..5V, V, stb. Zavarérzékeny, hosszú távon nem ajánlott a kimenet elvezetése. Áramkimenetű: 0 20 ma és 4 20 ma egyenáramú kimenet. Utóbbinál nullponteltolással növeli a zavarvédettséget, 0..4mA között a távadó tápellátása történik. Akár 30 km-re is szállítható a jel. (Ellenállás lezárás szükséges az áramhurok vevő oldalán.) Impulzus kimenetű: négyszögjel kimenet, feszültség- vagy áramimpulzus sorozatokkal. Középérték: egyenfeszültség -> átalakítható analóg jellé. Nagy távolságokra is alkalmas. Frekvencia- és impulzusszélesség kimenet is lehetésges. 35/86
36 DIGITÁLIS TÁVADÓK Feszültség vagy áramimpulzusok a kimeneten. Kódolt formában, diszkrét jelképi értékekben adódik a kimenet. Párhuzamosan és sorosan kódolt kimenetek is lehetségesek. A kód lehet szószervezésű (belekódolva: cím, idő, hely, stb.) Soros kimenet a leggyakoribb. A kódok szinte mindig keretes, szószervezésű formában terjednek (üzenetblokkok). Párhuzamos kiementnél: karaktermultiplex kimenet. A multiplexált jel (pl. Nibble-soros) egy digitális kijelző meghajtásra lehet alkalmas. Ajánlott irodalom: - Hahn, Harsányi, Lepsényi, Mizsei: Érzékelők és beavatkozók, Budapest Műegyetemi kiadó - Lambert Miklós: Szenzorok elmélet és gyakorlat, Budapest 2009, Invest- Marketing Bt. 36/86

37 GÉPJÁRMŰVEK BUSZRENDSZREREI 37/86

38 CAN BUSZ CAN CONTROL AREA NETWORK Bosch fejlesztés (Intellel) ( ) Fizikai és adatkapcsolati rétegen 5Kbit/s-1Mbit/s max 40 m távolságon Rendkívüli üzembiztonság Árnyékolt/árnyékolatlan sodort érpáros kivitelezés Egy busz 30 szenzort bír el! Fizikai kialakítás: Szabványos 120 Ohmos lezárások 38/86

39 CAN BUSZ Az adatkapcsolati és fizikai rétegben megvalósítandó feladatok Egy CAN buszon kommunikálni képes eszköz ezeket a feladatok valósítja meg Az adatátvitel menete: 1. Üzenetforma kialakítása 2. Üzenet küldése 3. Üzenet fogadása 4. Üzenet vizsgálata 5. Üzenet átvétele A CAN buszon történő adatátvitel hasonlít egy telefonkonferencia lebonyolításához. A résztvevők egyike mondja az üzenetét a közös kábelre, mialatt a többiek figyelik, hogy mi hallható a vonalon. Egy vagy több résztvevő számára fontos lehet az üzenet, míg mások számára érdektelen. Üzenetfunkciók: Adattovábbító, Adatigénylő, Hibajelző, Túlterheltségjelző 39/86
40 LIN BUSZ Bonyolulttá váló szenzorhálózat indukálta a fejlesztését Megnövekedett mikroprocesszor és szenzorszám LIN Local Interconnect Network Alacsonyabb sebesség, olcsóbb a CAN-nél Nagy megbízhatóság Skálázható, több csomópont, alacsony Slave költség Egy master, több slave. Master csatlakozik a CAN buszhoz! 40/86


41 LIN BUSZ CAN LIN KÖZPONTI MULTIPLEX - Moderált mennyiségű elektronika, moderált mennyiségű vezetékezés - Kisebb flexibilitás - Sokféle multiplex modul kell ELOSZTOTT MULTIPLEX - Sok elektronika, kevés vezeték - Nagyobb flexibilitás, nem kell centrált mutiplex rendszer - Könnyű hibadetekció 41/86
 (szimpla/dupla")
42 FLEXRAY BUSZ 2003-ban alkották (BMW, DaimlerChrysler, Motorola, Philips, GM, Bosch) Szinkron rendszer, 10 Mbit/s Szinkronizálás: közös órajellel CAN-től gyorsabb, de drágább is Szigeteletlen sodort érpár(ok) (szimpla/dupla vezetékkel): 42/86



43 FLEXRAY TOPOLÓGIÁK Multi-drop Busz (előny: egyszerűbb vezetékezés, de rövidebb távok) Csillag (központi elem, hosszabb távokra is jó, de a hosszabb vezetékezés miatt zavarérzékenyebb) Hibrid (a fenti kettő keveréke, jövőbeli alkalmazásoknál) 43/86
44 BUSZOK ÖSSZEHASONLÍTÁSA Busz típus LIN CAN FlexRay Sebesség 40 kbit/s 1 Mbit/s 10 Mbit/s Költség $ $$ $$$ Vezetékek or 4 Tipikus applikációk Karosszéria elektronikák (tükrök, elektromos ülések, kiegészítők) hajtáslánc (motor, váltó, ABS) Nagy teljesítményű elemek, biztonsági alkatrészek (Drive-bywire, aktív felfüggesztés, adaptív sebességtartó automatika) 44/86

45 A JELFELDOLGOZÁS FOLYAMATA előerősítés offszet-, hőmérséklet-kompenzálás digitalizálás linearizálás digitál-analóg átalakítás 45/86

46 MEMS (MICROELECTROMECHANICAL SYSTEMS) A Mikro-Elektro-Mechanikus-Rendszerek (MEMS) mechanikai elemek (érzékelők, beavatkozók) és elektronikus elemek közös hordozón való megvalósítása mikroelektronikai és mikromechanikai technológiák együttes alkalmazásával. Az autóipar a MEMS elemek második legnagyobb felhasználója. MEMS piac 2006-ban 7.4 milliárd USD, ebből autóipari felhasználás 1.5 milliárd USD. Az éves növekedés között 9% után az autóipari felhasználás 2.1 milliárd USD-re növekedett 46/86


47 TÖMBI- ÉS FELÜLETI MIKROMECHANIKAI TECHNOLÓGIÁK Tömbi mikromechanika: Si izotróp maratásnál alámaródás jön létre. Si anizotróp maratásával szabályos és pontos mikromechanikai szerkezetek készíthetők. Előállítható alakzatok: hidak, félhidak, árkok, membránok, gödrök. Nedves kémiai maratás Izotróp maratás savas fürdőben maszk Si Anizotróp maratás lúgos fürdőben áldozati réteg felvitele Anódos bondolás üveg Si üveg Si szelet Felületi mikromechanika: Szabályos alakú, kis méretű, bonyolult 3D-s alakzatok hozhatók létre. poliszilícium felvitele poliszilícium maratása Áldozati réteg eltávolítása Forrás: Bosch 47/86

48 GYORSULÁSÉRZÉKELŐK Forrás: Inventure 48/86
49 GYORSULÁSÉRZÉKELŐK AZ AUTÓELEKTRONIKÁBAN Motorvezérlés: kopogás érzékelés Passzív biztonsági rendszerek: légzsák vezérlés, övfeszítő, övhatároló, borulás érzékelés. Aktív biztonsági rendszerek: ABS, ESP. Egyéb rendszerek: aktív felfüggesztés, riasztó rendszerek g 50 g 50 g 0.4 g 4 g g 1 10 g 1 g 49/86



50 GYORSULÁSMÉRŐ ELVI FELÉPÍTÉSE Gyorsulásmérő elvi vázlata A mozgásegyenletet Newton II. egyenlete írja le: Ahol k m a rugóállandó b m Az érzékenység: m x b x k m x ma a sebességgel arányos csillapítás S=x/a=m/k m A rezonancia frekvencia: ω 0 = k m /m A kettő szorzata: S ω 0 2 =1 m Villamos helyettesítő képe Válaszfüggvény 50/86
51 Érzékelők 51/86 ) sin( ) sin( ) ( : megoldása egyenlet Az sin 2 írható : 2 2 és az Bevezetve sin gerjesztve : jellel Szinuszos : egyenlet mozgás A t x t k f t x t m f x x x m b k m b m k t f kx bx mx ma x k dt x d b dt x d m x m m GYORSULÁSMÉRŐ MOZGÁSEGYENLETE





52 PIEZOREZISZTÍV ELVEN MŰKÖDŐ SZENZOR hídkapcsolás (hasonlóan, mint a nyúlásmérő bélyegeknél), DC mérési lehetőség, a mérés pontossága a tápfeszültségtől függ (elérhető maximum), a híd miatt részben helyben kompenzálható a hőmérsékletfüggés, kimagasló ütésállóság. 52/86
53 PIEZOELEKTROMOS KOPOGÁS-ÉRZÉKELŐ Forrás: Bosch Piezoelektromos kopogás-érzékelő Kopogás-érzékelő jelalakjai A belsőégésű motorok a legnagyobb teljesítményt optimális előgyújtási szögnél adják le. Nem megfelelő égésnél a motor kopog. A motor kopogását a hengerre szerelt piezoelektromos kopogás-érzékelővel mérik. A jobb oldali ára felső diagramja egy kopogásmentes, míg az alsó ábrán jól megfigyelhetők a kopogás miatti kiugró gyorsulás értékek. 53/86
 elmozdul piezo")
 - Hengerenként lehet")
54 PIEZOELEKTROMOS KOPOGÁS-ÉRZÉKELŐ Forrás: Bosch Piezoelektromos kopogás-érzékelő Kopogás-érzékelő jelalakjai - Tömeg (2) elmozdul piezo kerámián (1) érzékelhető az elmozdulás - A kopogás érzékeléséhez megfelelő felfogatásra van szükség (alátétet nem használnak) - Hengerenként lehet kopogásszenzort alkalmazni. 54/86


55 KAPACITÍV GYORSULÁSÉRZÉKELŐK differenciálkapacitás-változás, tömbi mikromechanika, összkapacitás kb ff, DC mérési lehetőség, légcsillapítás. Forrás: VTI 55/86



56 KAPACITÍV GYORSULÁSÉRZÉKELŐK II. fésűs szerkezet, differenciálkapacitás-változás, felületi mikromechanika, összkapacitás kb. 60 ff, DC mérési lehetőség. Forrás: Bosch 56/86

57 ADXL202 GYORSULÁSÉRZÉKELŐ 57/86

58 ADXL202 BLOKKVÁZLATA 59/86




59 TERMODINAMIKUS GYORSULÁSÉRZÉKELŐK finom felbontás (< 1 mg), nincs mozgó alkatrész, kimagasló ütésállóság (> g). 60/86


60 TERMODINAMIKUS GYORSULÁSÉRZÉKELŐ (MEMSIC) Az MXD2020 láb-kompatibilis az Analog Devices gyártmányú AXD 202-vel. Maximális méréstartománya 2g. Kis frekvenciás áramkörökben használják pl. riasztó. 61/86

61 GIROSZKÓP MŰKÖDÉSI ELVE A giroszkóp (más néven pörgettyű) a fizikából ismert perdületmegmaradás törvényét demonstráló eszköz. A legegyszerűbb változata egy tengely körül szabadon forgó lendkerékből áll. Amikor a kerék forogása közben az eszközt a tengelyre merőleges erőhatás éri, az eszköz a tengelyre és a külső erőhatásra egyaránt merőleges irányban fordul el. Giroszkópokat gyakran alkalmaznak iránytű helyett vagy azok kiegészítéseként (hajókon, repülőkön, űreszközökön). Ha ugyanis az eszközt további két tengellyel látjuk el úgy, hogy a három tengely egymásra kölcsönösen merőleges legyen, a giroszkóp tehát tetszőleges irányba szabadon el tud fordulni, akkor a pörgő kerék megőrzi forgási tengelyének eredeti irányát, függetlenül attól, hogy a kerete hogyan fordul el (ld. ábra.) A giroszkóp használható stabilitás fokozására is. Hasonló funkciót látnak el a giroszkópok precíziós műszerekben és járműveken is. 62/86




62 GIROSZKÓP SZERKEZETEK Forrás: BOSCH Elektromechanikus giroszkóp Keretben rezgetett tömegű giroszkóp Rezgetett korongú giroszkóp 63/86



63 SZÖGSEBESSÉG-ÉRZÉKELŐ (YAW-RATE) 64/86


64 SZÖGSEBESSÉG-ÉRZÉKELŐ (YAW-RATE) 65/86
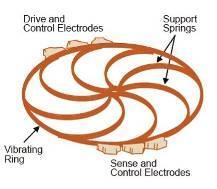




65 GIROSZKÓP SZERKEZETEK Rezgetett gyűrű tömegű giroszkóp Rezgetett hangvillás giroszkóp 66/86



66 SZÖGSEBESSÉG-ÉRZÉKELŐ (YAW-RATE) Függőleges tengely körüli elfordulás Coriolis effektuson alapul a mérés, Coriolis erő értéke: 2mv ω, Kis nagyságrendű erőt kell mérni, rezonátor giroszkóp elv, analóg vagy digitális kimenet (CAN). hossztengely körüli verzió (pl. borulás, elfordulás) Forrás: Bosch 67/86

67 SZÖGSEBESSÉG-ÉRZÉKELŐ (YAW-RATE) Megértéshez ajánlott: Forrás: Bosch A tömbi mikromechanikával kialakított v irányban mozgó gyorsulásérzékelőket elekrodinamikusan rezgetik ellentétes fázisban 50 μmes kitéréssel. Az alsó érzékelők felületén az előzőekre merőlegesen két felületi mikromechanikával kialakított gyorsulásérzékelő található, amelyek a Coriolis erő hatására elmozdulnak. A kapacitás változás értéke a szögsebességgel arányos. 68/86

68 69/86

69 SZÖGSEBESSÉG-ÉRZÉKELŐ (ROLL-RATE, DRS-MM2) Ajánlott: Forrás: Bosch A fésűs szerkezetű elektrosztatikusan rezgetett korong átmérője 1,6 mm, vastagsága 10 μm, a rezgési frekvencia 1,5 khz. Ha az érzékelő az x tengely körül elfordul a Coriolis erő hatására a fésűs szerkezet a függőleges helyzetéből kitér. Az alaplap és a felületek között mérhető kapacitás változás a szögelfordulással arányos. A megkívánt kis csillapítás miatt a tokozásban a nyomás < 5 mbar-nál. 71/86
")
70 SZÖGSEBESSÉG-ÉRZÉKELŐ (ROLL- RATE, DRS-MM2) 72/86
71 Ajánlott: REZGETETT HANGVILLÁS GIROSZKÓP Forrás: Bosch A lengő test mérendő része B a lengő test befolyásolandó része (ellenfázois) 1 lengő test 2 gyorsulás érzékelő 3 működtető (piezo elektromos elem a rezgés létesítésre) 4 szabályzó 5 töltéserősítés 6 többszöröző (demoduláció) 7 aluláteresztő szűrő 8 rezgésgerjesztés Ua kimeneti feszültség (amplitúdó arányos a perdülettel, előjel arányos az elmozdulási iránytól) Ω perdületi szögsebesség Pl. navigációs rendszerek menetirány+kanyarodás érzékelésénél 73/86
")
72 KOMBINÁLT MODUL (SZENZOR CLUSTER) 74/86
")
73 KOMBINÁLT MODUL (SZENZOR CLUSTER) 75/86

74 76/86

75 JÁRMŰVEK BIZTONSÁGI RENDSZEREI A passzív biztonsági rendszerek baleset esetén az utasok védelmét szolgálják: légzsák övfeszítő Az aktív biztonsági rendszerek segítenek elkerülni a baleseteket: ABS blokkolásgátló rendszer ASR kipörgésgátló rendszer Forrás: Bosch 77/86

76 ABS ANTI-LOCK BREAKING SYSTEM Forrás: Bosch 78/86

77 ABS ANTI-LOCK BREAKING SYSTEM Forrás: Bosch 79/86

78 ASR ANTI SLIP REGULATION Előnyök: Megakadályozza a kerekek kipörgését; Javítja a menetstabilitást; Kormányozhatóan tartja a járművet Forrás: Bosch 80/86

79 ASR ANTI SLIP REGULATION Forrás: Bosch 81/86

80 ASR ANTI SLIP REGULATION Forrás: Bosch 82/86
 erősebb meghajtás Konzisztens megoldás")
81 Forrás: SEAT EBL: ELECTRONIC BREAK LOCK Csúszós útfelület Adott keréken redukált meghajtás Hátsó/oldalsó kerekeken (ahol a tapadás biztosított) erősebb meghajtás Konzisztens megoldás továbbhaladásnál. 83/86

82 Forrás: Bosch ESP: ELECTRONIC STABILITY PROGRAM Ajánlott: Menetstabilitás javítása komplex rendszeren keresztül: Gyorsulásérzékelő a kerekeken, kormány szögelfordulás szenzor, Yaw Rate szenzor. gyakorlatban ABS+ESR+EBL közreműködés 84/86

83 AJÁNLOTT OKTATÁSI SEGÉDLET! /86
84 ELLENŐRZŐ KÉRDÉSEK - Röviden jellemezze a modern gépjárművek elektronikai trendjeit! - Mi a SMART és az AUTONÓM gépjárművek közötti elvi különbség? - A szenzor - bemenet, kimenet, mérőrendszer: jellemezze! - Távadók, és típusaik jellemezze! - Hasonlítsa össze a CAN, LIN és FLEXRAY buszokat! - Mutassa meg a felületi és tömbi mikromechanika közti különbséget! - Mutassa be a kopogásérzékelőt és a működési elvét! - Mutasson példát ábrával és magyarázattal egy gyorsulásérzékelőre! - Mi a lényege a termomechanikus gyorsulásérzékelőnek? - Mutasson példát ábrával és magyarázattal egy yaw szenzorra! - Mutassa be a szenzorok együttműködését az elektronikai stabilitás program példáján keresztül! - Mi a lényege a Sensor Cluster-eknek? 86/86
MEMS, szenzorok. Tóth Tünde Anyagtudomány MSc
 MEMS, szenzorok Tóth Tünde Anyagtudomány MSc 2016. 05. 04. 1 Előadás vázlat MEMS Története Előállítása Szenzorok Nyomásmérők Gyorsulásmérők Szögsebességmérők Áramlásmérők Hőmérsékletmérők 2 Mi is az a
MEMS, szenzorok Tóth Tünde Anyagtudomány MSc 2016. 05. 04. 1 Előadás vázlat MEMS Története Előállítása Szenzorok Nyomásmérők Gyorsulásmérők Szögsebességmérők Áramlásmérők Hőmérsékletmérők 2 Mi is az a
Járműinformatika Bevezetés
 Járműinformatika Bevezetés 2016/2017. tanév, II. félév Dr. Kovács Szilveszter E-mail: szkovacs@iit.uni-miskolc.hu Informatika Intézet 107/a. Tel: (46) 565-111 / 21-07 Autó elektronika az 1970-es években
Járműinformatika Bevezetés 2016/2017. tanév, II. félév Dr. Kovács Szilveszter E-mail: szkovacs@iit.uni-miskolc.hu Informatika Intézet 107/a. Tel: (46) 565-111 / 21-07 Autó elektronika az 1970-es években
Járműinformatika A jármű elektronikus rendszerei
 Járműinformatika A jármű elektronikus rendszerei 2016/2017. tanév, II. félév Dr. Kovács Szilveszter E-mail: szkovacs@iit.uni-miskolc.hu Informatika Intézet 107/a. Tel: (46) 565-111 / 21-07 A jármű alrendszerei
Járműinformatika A jármű elektronikus rendszerei 2016/2017. tanév, II. félév Dr. Kovács Szilveszter E-mail: szkovacs@iit.uni-miskolc.hu Informatika Intézet 107/a. Tel: (46) 565-111 / 21-07 A jármű alrendszerei
KÖZEG. dv dt. q v. dm q m. = dt GÁZOK, GŐZÖK ÉS FOLYADÉKOK ÁRAMLÓ MENNYISÉGÉNEK MÉRÉSE MÉRNI LEHET:
 GÁZOK, GŐZÖK ÉS FOLYADÉKOK ÁRAMLÓ MENNYISÉGÉNEK MÉRÉSE MÉRNI LEHET: AZ IDŐEGYSÉG ALATT ÁTÁRAMLÓ MENNYISÉG TÉRFOGATÁT TÉRFOGATÁRAM MÉRÉS q v = dv dt ( m 3 / s) AZ IDŐEGYSÉG ALATT ÁTÁRAMLÓ MENNYISÉG TÖMEGÉT
GÁZOK, GŐZÖK ÉS FOLYADÉKOK ÁRAMLÓ MENNYISÉGÉNEK MÉRÉSE MÉRNI LEHET: AZ IDŐEGYSÉG ALATT ÁTÁRAMLÓ MENNYISÉG TÉRFOGATÁT TÉRFOGATÁRAM MÉRÉS q v = dv dt ( m 3 / s) AZ IDŐEGYSÉG ALATT ÁTÁRAMLÓ MENNYISÉG TÖMEGÉT
Járműinformatika bevezetés II. 2. Óra
 Járműinformatika bevezetés II. 2. Óra Járműves buszrendszerek osztályozása Alaprendszerek: SubBus: CAN (High-Speed, Low-Speed) SAE J1567 (C 2 D), SAE J1850 (PWM) SAE J1850 (PWM) VAN Nagysebeségű / Valós
Járműinformatika bevezetés II. 2. Óra Járműves buszrendszerek osztályozása Alaprendszerek: SubBus: CAN (High-Speed, Low-Speed) SAE J1567 (C 2 D), SAE J1850 (PWM) SAE J1850 (PWM) VAN Nagysebeségű / Valós
Mérés és adatgyűjtés
 Mérés és adatgyűjtés 7. óra Mingesz Róbert Szegedi Tudományegyetem 2013. április 11. MA - 7. óra Verzió: 2.2 Utolsó frissítés: 2013. április 10. 1/37 Tartalom I 1 Szenzorok 2 Hőmérséklet mérése 3 Fény
Mérés és adatgyűjtés 7. óra Mingesz Róbert Szegedi Tudományegyetem 2013. április 11. MA - 7. óra Verzió: 2.2 Utolsó frissítés: 2013. április 10. 1/37 Tartalom I 1 Szenzorok 2 Hőmérséklet mérése 3 Fény
Járműinformatika bevezetés. 1. Óra
 Járműinformatika bevezetés 1. Óra Ajánlott irodalom Gépjárművek buszhálózatai Dr. Kováts Miklós, Dr. Szalay Zsolt (ISBN 978-963-9945-10-4) Multiplexed Networks for Embedded Systems Dominique Paret (ISBN
Járműinformatika bevezetés 1. Óra Ajánlott irodalom Gépjárművek buszhálózatai Dr. Kováts Miklós, Dr. Szalay Zsolt (ISBN 978-963-9945-10-4) Multiplexed Networks for Embedded Systems Dominique Paret (ISBN
Járműinformatika Bevezetés
 Járműinformatika Bevezetés 2018/2019. tanév, II. félév Dr. Kovács Szilveszter E-mail: szkovacs@iit.uni-miskolc.hu Informatika Intézet 107/a. Tel: (46) 565-111 / 21-07 Autó elektronika az 1970-es években
Járműinformatika Bevezetés 2018/2019. tanév, II. félév Dr. Kovács Szilveszter E-mail: szkovacs@iit.uni-miskolc.hu Informatika Intézet 107/a. Tel: (46) 565-111 / 21-07 Autó elektronika az 1970-es években
VTOL UAV. Moduláris fedélzeti elektronika fejlesztése pilóta nélküli repülőgépek számára. Árvai László, Doktorandusz, ZMNE ÁRVAI LÁSZLÓ, ZMNE
 Moduláris fedélzeti elektronika fejlesztése pilóta nélküli repülőgépek számára Árvai László, Doktorandusz, ZMNE Tartalom Fejezet Témakör 1. Fedélzeti elektronika tulajdonságai 2. Modularitás 3. Funkcionális
Moduláris fedélzeti elektronika fejlesztése pilóta nélküli repülőgépek számára Árvai László, Doktorandusz, ZMNE Tartalom Fejezet Témakör 1. Fedélzeti elektronika tulajdonságai 2. Modularitás 3. Funkcionális
Mérés és adatgyűjtés
 Mérés és adatgyűjtés 4. óra - levelező Mingesz Róbert Szegedi Tudományegyetem 2011. március 18. MA lev - 4. óra Verzió: 1.3 Utolsó frissítés: 2011. május 15. 1/51 Tartalom I 1 A/D konverterek alkalmazása
Mérés és adatgyűjtés 4. óra - levelező Mingesz Róbert Szegedi Tudományegyetem 2011. március 18. MA lev - 4. óra Verzió: 1.3 Utolsó frissítés: 2011. május 15. 1/51 Tartalom I 1 A/D konverterek alkalmazása
Összefüggő szakmai gyakorlat témakörei
 Összefüggő szakmai gyakorlat témakörei Villamosipar és elektronika ágazat Elektrotechnika gyakorlat 10. évfolyam 10 óra Sorszám Tananyag Óraszám Forrasztási gyakorlat 1 1.. 3.. Forrasztott kötés típusai:
Összefüggő szakmai gyakorlat témakörei Villamosipar és elektronika ágazat Elektrotechnika gyakorlat 10. évfolyam 10 óra Sorszám Tananyag Óraszám Forrasztási gyakorlat 1 1.. 3.. Forrasztott kötés típusai:
Programozó- készülék Kezelőkozol RT óra (pl. PC) Digitális bemenetek ROM memória Digitális kimenetek RAM memória Analóg bemenet Analóg kimenet
 Digitális bemenetek ROM memória Digitális kimenetek RAM memória Analóg bemenet Analóg kimenet") 2. ZH A csoport 1. Hogyan adható meg egy digitális műszer pontossága? (3p) Digitális műszereknél a pontosságot két adattal lehet megadni: Az osztályjel ±%-os értékével, és a ± digit értékkel (jellemző
2. ZH A csoport 1. Hogyan adható meg egy digitális műszer pontossága? (3p) Digitális műszereknél a pontosságot két adattal lehet megadni: Az osztályjel ±%-os értékével, és a ± digit értékkel (jellemző
2. lecke: Gépjárművek világító- és jelzőberendezései
 2. lecke: Gépjárművek világító- és jelzőberendezései Cél: A tananyag célja, hogy a hallgató ismerje meg a járművek világító- és jelzőberendezéseit. Legyen tisztában a működésükkel, vonatkozó jogszabályokkal.
2. lecke: Gépjárművek világító- és jelzőberendezései Cél: A tananyag célja, hogy a hallgató ismerje meg a járművek világító- és jelzőberendezéseit. Legyen tisztában a működésükkel, vonatkozó jogszabályokkal.
2. rész PC alapú mérőrendszer esetén hogyan történhet az adatok kezelése? Írjon pár 2-2 jellemző is az egyes esetekhez.
 Méréselmélet és mérőrendszerek (levelező) Kérdések - 2. előadás 1. rész Írja fel a hiba fogalmát és hogyan számítjuk ki? Hogyan számítjuk ki a relatív hibát? Mit tud a rendszeres hibákról és mi az okozója
Méréselmélet és mérőrendszerek (levelező) Kérdések - 2. előadás 1. rész Írja fel a hiba fogalmát és hogyan számítjuk ki? Hogyan számítjuk ki a relatív hibát? Mit tud a rendszeres hibákról és mi az okozója
1. Metrológiai alapfogalmak. 2. Egységrendszerek. 2.0 verzió
 Mérés és adatgyűjtés - Kérdések 2.0 verzió Megjegyzés: ezek a kérdések a felkészülést szolgálják, nem ezek lesznek a vizsgán. Ha valaki a felkészülése alapján önállóan válaszolni tud ezekre a kérdésekre,
Mérés és adatgyűjtés - Kérdések 2.0 verzió Megjegyzés: ezek a kérdések a felkészülést szolgálják, nem ezek lesznek a vizsgán. Ha valaki a felkészülése alapján önállóan válaszolni tud ezekre a kérdésekre,
MINTA Írásbeli Záróvizsga Mechatronikai mérnök MSc. Debrecen,
 MINTA Írásbeli Záróvizsga Mechatronikai mérnök MSc Debrecen, 2017. 01. 03. Név: Neptun kód: Megjegyzések: A feladatok megoldásánál használja a géprajz szabályait, valamint a szabványos áramköri elemeket.
MINTA Írásbeli Záróvizsga Mechatronikai mérnök MSc Debrecen, 2017. 01. 03. Név: Neptun kód: Megjegyzések: A feladatok megoldásánál használja a géprajz szabályait, valamint a szabványos áramköri elemeket.
Elektronika Előadás. Modulátorok, demodulátorok, lock-in erősítők
 Elektronika 2 10. Előadás Modulátorok, demodulátorok, lock-in erősítők Irodalom - Megyeri János: Analóg elektronika, Tankönyvkiadó, 1990 - U. Tiecze, Ch. Schenk: Analóg és digitális áramkörök, Műszaki
Elektronika 2 10. Előadás Modulátorok, demodulátorok, lock-in erősítők Irodalom - Megyeri János: Analóg elektronika, Tankönyvkiadó, 1990 - U. Tiecze, Ch. Schenk: Analóg és digitális áramkörök, Műszaki
Autóipari vezérlőegységek aktív környezetállósági tesztelésének módszerei
 Autóipari vezérlőegységek aktív környezetállósági tesztelésének módszerei Aradi Szilárd PhD témavezető: Dr. Gyenes Károly Közlekedés és járműirányítás workshop BME 2011 ISBN 978-963-420-975-1 Bevezetés
Autóipari vezérlőegységek aktív környezetállósági tesztelésének módszerei Aradi Szilárd PhD témavezető: Dr. Gyenes Károly Közlekedés és járműirányítás workshop BME 2011 ISBN 978-963-420-975-1 Bevezetés
Mérésadatgyűjtés, jelfeldolgozás.
 Mérésadatgyűjtés, jelfeldolgozás. Nem villamos jelek mérésének folyamatai. Érzékelők, jelátalakítók felosztása. Passzív jelátalakítók. 1.Ellenállás változáson alapuló jelátalakítók -nyúlásmérő ellenállások
Mérésadatgyűjtés, jelfeldolgozás. Nem villamos jelek mérésének folyamatai. Érzékelők, jelátalakítók felosztása. Passzív jelátalakítók. 1.Ellenállás változáson alapuló jelátalakítók -nyúlásmérő ellenállások
SYS700-PLM Power Line Monitor modul DDC rendszerelemek, DIALOG-III család
 DDC rendszerelemek, DIALOG-III család KIVITEL ALKALMAZÁS A az energiaellátás minőségi jellemzőinek mérésére szolgáló szabadon programozható készülék. Épületfelügyeleti rendszerben (BMS), valamint önállóan
DDC rendszerelemek, DIALOG-III család KIVITEL ALKALMAZÁS A az energiaellátás minőségi jellemzőinek mérésére szolgáló szabadon programozható készülék. Épületfelügyeleti rendszerben (BMS), valamint önállóan
TxBlock-USB Érzékelőfejbe építhető hőmérséklet távadó
 TxBlock-USB Érzékelőfejbe építhető hőmérséklet távadó Bevezetés A TxBlock-USB érzékelőfejbe építhető, kétvezetékes hőmérséklet távadó, 4-20mA kimenettel. Konfigurálása egyszerűen végezhető el, speciális
TxBlock-USB Érzékelőfejbe építhető hőmérséklet távadó Bevezetés A TxBlock-USB érzékelőfejbe építhető, kétvezetékes hőmérséklet távadó, 4-20mA kimenettel. Konfigurálása egyszerűen végezhető el, speciális
Elektronika 2. TFBE5302
 Elektronika 2. TFBE5302 Mérőműszerek Analóg elektronika Feszültség és áram mérése Feszültségmérő: V U R 1 I 1 igen nagy belső ellenállású mérőműszer párhuzamosan kapcsolandó a mérendő alkatrésszel R 3
Elektronika 2. TFBE5302 Mérőműszerek Analóg elektronika Feszültség és áram mérése Feszültségmérő: V U R 1 I 1 igen nagy belső ellenállású mérőműszer párhuzamosan kapcsolandó a mérendő alkatrésszel R 3
Járműinformatika Multimédiás buszrendszerek (MOST, D2B és Bluetooth) 4. Óra
 4. Óra") Járműinformatika Multimédiás buszrendszerek (MOST, D2B és Bluetooth) 4. Óra Multimédiás adatok továbbítása és annak céljai Mozgókép és hang átvitele Szórakoztató elektronika Biztonsági funkciókat megvalósító
Járműinformatika Multimédiás buszrendszerek (MOST, D2B és Bluetooth) 4. Óra Multimédiás adatok továbbítása és annak céljai Mozgókép és hang átvitele Szórakoztató elektronika Biztonsági funkciókat megvalósító
Intelligens Rendszerek Elmélete. Technikai érzékelők. A tipikus mérőátalakító transducer
 Intelligens Rendszerek Elmélete A tipikus mérőátalakító transducer dr. Kutor László Technikai érzékelők http://mobil.nik.bmf.hu/tantargyak/ire.html Login: ire jelszó: IRE07 IRE 3/1 IRE 3/4 Mitől okos (intelligens?)
Intelligens Rendszerek Elmélete A tipikus mérőátalakító transducer dr. Kutor László Technikai érzékelők http://mobil.nik.bmf.hu/tantargyak/ire.html Login: ire jelszó: IRE07 IRE 3/1 IRE 3/4 Mitől okos (intelligens?)
Hiszterézis: Egy rendszer kimenete nem csak az aktuális állapottól függ, hanem az állapotváltozás aktuális irányától is.
 1. Mi az érzékelő? Definiálja a típusait (belső/külső). Mit jelent a hiszterézis? Miért nem tudunk közvetlenül mérni, miért származtatunk? Hogyan kapcsolódik össze az érzékelés és a becslés a mérések során?
1. Mi az érzékelő? Definiálja a típusait (belső/külső). Mit jelent a hiszterézis? Miért nem tudunk közvetlenül mérni, miért származtatunk? Hogyan kapcsolódik össze az érzékelés és a becslés a mérések során?
Valódi mérések virtuális műszerekkel
 Valódi mérések virtuális műszerekkel Kopasz Katalin, Dr. Makra Péter, Dr. Gingl Zoltán SZTE TTIK Kísérleti Fizikai Tanszék A legfontosabb célok Kísérletezéses oktatás támogatása Egyetlen eszköz, mégis
Valódi mérések virtuális műszerekkel Kopasz Katalin, Dr. Makra Péter, Dr. Gingl Zoltán SZTE TTIK Kísérleti Fizikai Tanszék A legfontosabb célok Kísérletezéses oktatás támogatása Egyetlen eszköz, mégis
Érzékelők és beavatkozók
 Érzékelők és beavatkozók DC motorok 3. rész egyetemi docens - 1 - DC motorvezérlés H-híd: +V r Motor mozgatás előre Motor mozgatás hátra Fékezés Szabadonfutás a vezérlés függvényében UL LL + Ø - UR LR
Érzékelők és beavatkozók DC motorok 3. rész egyetemi docens - 1 - DC motorvezérlés H-híd: +V r Motor mozgatás előre Motor mozgatás hátra Fékezés Szabadonfutás a vezérlés függvényében UL LL + Ø - UR LR
TANTÁRGYI TEMATIKA. Félév (1/2/3) 2013/2014/2 JÁRMŰVILLAMOSSÁG ÉS ELEKTRONIKA. Beke Péter, Lőrincz Illés Előtanulmányi követelmények
 2013/2014/2 JÁRMŰVILLAMOSSÁG ÉS ELEKTRONIKA. Beke Péter, Lőrincz Illés Előtanulmányi követelmények") Oktatási hét TANTÁRGYI TEMATIKA Tantárgy kód NGB_KV009_2 Félév (1/2/3) 2013/2014/2 Tantárgy cím JÁRMŰVILLAMOSSÁG ÉS ELEKTRONIKA Tantárgy felelős Beke Péter Előadók Beke Péter, Lőrincz Illés Előtanulmányi
Oktatási hét TANTÁRGYI TEMATIKA Tantárgy kód NGB_KV009_2 Félév (1/2/3) 2013/2014/2 Tantárgy cím JÁRMŰVILLAMOSSÁG ÉS ELEKTRONIKA Tantárgy felelős Beke Péter Előadók Beke Péter, Lőrincz Illés Előtanulmányi
π π A vivőhullám jelalakja (2. ábra) A vivőhullám periódusideje T amplitudója A az impulzus szélessége szögfokban 2p. 2p [ ]
![π π A vivőhullám jelalakja (2. ábra) A vivőhullám periódusideje T amplitudója A az impulzus szélessége szögfokban 2p. 2p [ ]](/thumbs/92/108201304.jpg "π π A vivőhullám jelalakja (2. ábra) A vivőhullám periódusideje T amplitudója A az impulzus szélessége szögfokban 2p. 2p [ ]") Pulzus Amplitúdó Moduláció (PAM) A Pulzus Amplitúdó Modulációról abban az esetben beszélünk, amikor egy impulzus sorozatot használunk vivőhullámnak és ezen a vivőhullámon valósítjuk meg az amplitúdómodulációt
Pulzus Amplitúdó Moduláció (PAM) A Pulzus Amplitúdó Modulációról abban az esetben beszélünk, amikor egy impulzus sorozatot használunk vivőhullámnak és ezen a vivőhullámon valósítjuk meg az amplitúdómodulációt
TxRail-USB Hőmérséklet távadó
 TxRail-USB Hőmérséklet távadó Bevezetés TxRail-USB egy USB-n keresztül konfigurálható DIN sínre szerelhető hőmérséklet jeladó. Lehetővé teszi a bemenetek típusának kiválasztását és konfigurálását, méréstartomány
TxRail-USB Hőmérséklet távadó Bevezetés TxRail-USB egy USB-n keresztül konfigurálható DIN sínre szerelhető hőmérséklet jeladó. Lehetővé teszi a bemenetek típusának kiválasztását és konfigurálását, méréstartomány
Elektronika 11. évfolyam
 Elektronika 11. évfolyam Áramköri elemek csoportosítása. (Aktív-passzív, lineáris- nem lineáris,) Áramkörök csoportosítása. (Aktív-passzív, lineáris- nem lineáris, kétpólusok-négypólusok) Két-pólusok csoportosítása.
Elektronika 11. évfolyam Áramköri elemek csoportosítása. (Aktív-passzív, lineáris- nem lineáris,) Áramkörök csoportosítása. (Aktív-passzív, lineáris- nem lineáris, kétpólusok-négypólusok) Két-pólusok csoportosítása.
Jármû-elektronika ELEKTRONIKAI-INFORMATIKAI SZAKFOLYÓIRAT. 2003. november. 890 Ft. XII. évfolyam 7. szám
 XII. évfolyam 7. szám ELEKTRONIKAI-INFORMATIKAI SZAKFOLYÓIRAT 890 Ft 2003. november Jármû-elektronika Gyorsulásszenzorok az autóiparban (2. rész) SZEGEDI ANDRÁS Az elôzô részben bemutatásra került az autóiparban
XII. évfolyam 7. szám ELEKTRONIKAI-INFORMATIKAI SZAKFOLYÓIRAT 890 Ft 2003. november Jármû-elektronika Gyorsulásszenzorok az autóiparban (2. rész) SZEGEDI ANDRÁS Az elôzô részben bemutatásra került az autóiparban
Analóg elektronika - laboratóriumi gyakorlatok
 Analóg elektronika - laboratóriumi gyakorlatok. Mûveleti erõsítõk váltakozó-áramú alkalmazásai. Elmélet Az integrált mûveleti erõsítõk váltakozó áramú viselkedését a. fejezetben (jegyzet és prezentáció)
Analóg elektronika - laboratóriumi gyakorlatok. Mûveleti erõsítõk váltakozó-áramú alkalmazásai. Elmélet Az integrált mûveleti erõsítõk váltakozó áramú viselkedését a. fejezetben (jegyzet és prezentáció)
Minden mérésre vonatkozó minimumkérdések
 Minden mérésre vonatkozó minimumkérdések 1) Definiálja a rendszeres hibát 2) Definiálja a véletlen hibát 3) Definiálja az abszolút hibát 4) Definiálja a relatív hibát 5) Hogyan lehet az abszolút-, és a
Minden mérésre vonatkozó minimumkérdések 1) Definiálja a rendszeres hibát 2) Definiálja a véletlen hibát 3) Definiálja az abszolút hibát 4) Definiálja a relatív hibát 5) Hogyan lehet az abszolút-, és a
Elektronika Előadás. Digitális-analóg és analóg-digitális átalakítók
 Elektronika 2 9. Előadás Digitális-analóg és analóg-digitális átalakítók Irodalom - Megyeri János: Analóg elektronika, Tankönyvkiadó, 1990 - U. Tiecze, Ch. Schenk: Analóg és digitális áramkörök, Műszaki
Elektronika 2 9. Előadás Digitális-analóg és analóg-digitális átalakítók Irodalom - Megyeri János: Analóg elektronika, Tankönyvkiadó, 1990 - U. Tiecze, Ch. Schenk: Analóg és digitális áramkörök, Műszaki
Felhasználói kézikönyv
 Felhasználói kézikönyv 63B Digitális Rezgésmérő TARTALOMJEGYZÉK 1. Bevezetés... 2 2. Használat előtti ellenőrzés... 2 3. Funkciók... 2 4. Előlap és kezelőszervek... 3 5. LCD Képernyő... 3 6. Műszaki jellemzők...
Felhasználói kézikönyv 63B Digitális Rezgésmérő TARTALOMJEGYZÉK 1. Bevezetés... 2 2. Használat előtti ellenőrzés... 2 3. Funkciók... 2 4. Előlap és kezelőszervek... 3 5. LCD Képernyő... 3 6. Műszaki jellemzők...
Nyári gyakorlat teljesítésének igazolása Hiányzások
 Nyári gyakorlat teljesítésének igazolása Hiányzások - - Az összefüggő szakmai gyakorlatról hiányozni nem lehet. Rendkívüli, nem tervezhető esemény esetén az igazgatóhelyettest kell értesíteni. - A tanulók
Nyári gyakorlat teljesítésének igazolása Hiányzások - - Az összefüggő szakmai gyakorlatról hiányozni nem lehet. Rendkívüli, nem tervezhető esemény esetén az igazgatóhelyettest kell értesíteni. - A tanulók
Méréstechnika. Rezgésmérés. Készítette: Ángyán Béla. Iszak Gábor. Seidl Áron. Veszprém. [Ide írhatja a szöveget] oldal 1
![Méréstechnika. Rezgésmérés. Készítette: Ángyán Béla. Iszak Gábor. Seidl Áron. Veszprém. [Ide írhatja a szöveget] oldal 1](/thumbs/45/23262384.jpg "Méréstechnika. Rezgésmérés. Készítette: Ángyán Béla. Iszak Gábor. Seidl Áron. Veszprém. [Ide írhatja a szöveget] oldal 1") Méréstechnika Rezgésmérés Készítette: Ángyán Béla Iszak Gábor Seidl Áron Veszprém 2014 [Ide írhatja a szöveget] oldal 1 A rezgésekkel kapcsolatos alapfogalmak A rezgés a Magyar Értelmező Szótár megfogalmazása
Méréstechnika Rezgésmérés Készítette: Ángyán Béla Iszak Gábor Seidl Áron Veszprém 2014 [Ide írhatja a szöveget] oldal 1 A rezgésekkel kapcsolatos alapfogalmak A rezgés a Magyar Értelmező Szótár megfogalmazása
Tájékoztató. Használható segédeszköz: számológép, rajzeszközök
 12/2013. (III. 29.) NFM rendelet szakmai és vizsgakövetelménye alapján. Szakképesítés, azonosító száma és megnevezése 55 525 01 Autótechnikus Tájékoztató A vizsgázó az első lapra írja fel a nevét! Ha a
12/2013. (III. 29.) NFM rendelet szakmai és vizsgakövetelménye alapján. Szakképesítés, azonosító száma és megnevezése 55 525 01 Autótechnikus Tájékoztató A vizsgázó az első lapra írja fel a nevét! Ha a
Moore & more than Moore
 1 Moore & more than Moore Fürjes Péter E-mail:, www.mems.hu 2 A SZILÍCIUM (silex) 3 A SZILÍCIUM Felfedező: Jons Berzelius 1823, Svédország Természetes előfordulás: gránit, kvarc, agyag, homok 2. leggyakoribb
1 Moore & more than Moore Fürjes Péter E-mail:, www.mems.hu 2 A SZILÍCIUM (silex) 3 A SZILÍCIUM Felfedező: Jons Berzelius 1823, Svédország Természetes előfordulás: gránit, kvarc, agyag, homok 2. leggyakoribb
Akusztikus MEMS szenzor vizsgálata. Sós Bence JB2BP7
 Akusztikus MEMS szenzor vizsgálata Sós Bence JB2BP7 Tartalom MEMS mikrofon felépítése és típusai A PDM jel Kinyerhető információ CIC szűrő Mérési tapasztalatok. Konklúzió MEMS (MicroElectrical-Mechanical
Akusztikus MEMS szenzor vizsgálata Sós Bence JB2BP7 Tartalom MEMS mikrofon felépítése és típusai A PDM jel Kinyerhető információ CIC szűrő Mérési tapasztalatok. Konklúzió MEMS (MicroElectrical-Mechanical
Kaméleon K860. IAS Automatika Kft www.iasautomatika.hu
 Kaméleon K860 Univerzális Digitális Szabályozó A K860 szabályozók általános automatizálási feladatokra kifejlesztett digitális szabályozók. Épületgépészeti alkalmazásokra kiválóan alkalmasak, gazdaságos
Kaméleon K860 Univerzális Digitális Szabályozó A K860 szabályozók általános automatizálási feladatokra kifejlesztett digitális szabályozók. Épületgépészeti alkalmazásokra kiválóan alkalmasak, gazdaságos
DOP 02. Kezelési és karbantartási útmutató OPTIKAI KIOLVASÓ. Dok. No. DOP-070809-000-01-1M 2007/8
 DOP 02 OPTIKAI KIOLVASÓ Kezelési és karbantartási útmutató Dok. No. DOP-070809-000-01-1M 2007/8 TARTALOMJEGYZÉK DOP 02... 1 Általános tudnivalók, biztonság... 2 Műszaki leírás... 3 Felépítése... 3 Műszaki
DOP 02 OPTIKAI KIOLVASÓ Kezelési és karbantartási útmutató Dok. No. DOP-070809-000-01-1M 2007/8 TARTALOMJEGYZÉK DOP 02... 1 Általános tudnivalók, biztonság... 2 Műszaki leírás... 3 Felépítése... 3 Műszaki
Nemzeti Akkreditáló Testület. RÉSZLETEZŐ OKIRAT a NAT-2-0170/2013 nyilvántartási számú akkreditált státuszhoz
 Nemzeti Akkreditáló Testület RÉSZLETEZŐ OKIRAT a NAT20170/2013 nyilvántartási számú akkreditált státuszhoz A TiszaTeszt Méréstechnikai Kft. Kalibráló Laboratórium (4440 Tiszavasvári, Kabay J. u. 29.) akkreditált
Nemzeti Akkreditáló Testület RÉSZLETEZŐ OKIRAT a NAT20170/2013 nyilvántartási számú akkreditált státuszhoz A TiszaTeszt Méréstechnikai Kft. Kalibráló Laboratórium (4440 Tiszavasvári, Kabay J. u. 29.) akkreditált
Orvosi jelfeldolgozás. Információ. Információtartalom. Jelek osztályozása De, mi az a jel?
 Orvosi jelfeldolgozás Információ De, mi az a jel? Jel: Információt szolgáltat (információ: új ismeretanyag, amely csökkenti a bizonytalanságot).. Megjelent.. Panasza? információ:. Egy beteg.. Fáj a fogam.
Orvosi jelfeldolgozás Információ De, mi az a jel? Jel: Információt szolgáltat (információ: új ismeretanyag, amely csökkenti a bizonytalanságot).. Megjelent.. Panasza? információ:. Egy beteg.. Fáj a fogam.
12/2013. (III. 29.) NFM rendelet szakmai és vizsgakövetelménye alapján.
 NFM rendelet szakmai és vizsgakövetelménye alapján.") 12/2013. (III. 29.) NFM rendelet szakmai és vizsgakövetelménye alapján. Szakképesítés, azonosító száma és megnevezése 54 525 01 Autóelektronikai műszerész Tájékoztató A vizsgázó az első lapra írja fel
12/2013. (III. 29.) NFM rendelet szakmai és vizsgakövetelménye alapján. Szakképesítés, azonosító száma és megnevezése 54 525 01 Autóelektronikai műszerész Tájékoztató A vizsgázó az első lapra írja fel
8. Laboratóriumi gyakorlat INKREMENTÁLIS ADÓ
 8. Laboratóriumi gyakorlat INKREMENTÁLIS ADÓ 1. A gyakorlat célja: Az inkrementális adók működésének megismerése. Számítások és szoftverfejlesztés az inkrementális adók katalógusadatainak feldolgozására
8. Laboratóriumi gyakorlat INKREMENTÁLIS ADÓ 1. A gyakorlat célja: Az inkrementális adók működésének megismerése. Számítások és szoftverfejlesztés az inkrementális adók katalógusadatainak feldolgozására
2. Elméleti összefoglaló
 2. Elméleti összefoglaló 2.1 A D/A konverterek [1] A D/A konverter feladata, hogy a bemenetére érkező egész számmal arányos analóg feszültséget vagy áramot állítson elő a kimenetén. A működéséhez szükséges
2. Elméleti összefoglaló 2.1 A D/A konverterek [1] A D/A konverter feladata, hogy a bemenetére érkező egész számmal arányos analóg feszültséget vagy áramot állítson elő a kimenetén. A működéséhez szükséges
Fókuszban a MEGOLDÁSOK KTS 560 / KTS 590. Vezérlőegység diagnosztika az ESI[tronic] használatával
![Fókuszban a MEGOLDÁSOK KTS 560 / KTS 590. Vezérlőegység diagnosztika az ESI[tronic] használatával](/thumbs/91/107540085.jpg "Fókuszban a MEGOLDÁSOK KTS 560 / KTS 590. Vezérlőegység diagnosztika az ESI[tronic] használatával") Fókuszban a MEGOLDÁSOK KTS 560 / KTS 590 Vezérlőegység diagnosztika az ESI[tronic] használatával Élvonalbeli Vezérlőegység diagnosztika az optimális hatékonyságért Az új és erős KTS 560 és KTS 590 modulok
Fókuszban a MEGOLDÁSOK KTS 560 / KTS 590 Vezérlőegység diagnosztika az ESI[tronic] használatával Élvonalbeli Vezérlőegység diagnosztika az optimális hatékonyságért Az új és erős KTS 560 és KTS 590 modulok
Elektronika 2. TFBE1302
 Elektronika 2. TFBE1302 Mérőműszerek Analóg elektronika Feszültség és áram mérése Feszültségmérő: V U R 1 I 1 igen nagy belső ellenállású mérőműszer párhuzamosan kapcsolandó a mérendő alkatrésszel R 3
Elektronika 2. TFBE1302 Mérőműszerek Analóg elektronika Feszültség és áram mérése Feszültségmérő: V U R 1 I 1 igen nagy belső ellenállású mérőműszer párhuzamosan kapcsolandó a mérendő alkatrésszel R 3
Rádiókommunikációval is Az adatokat szabad rádiófrekvencián sugározza az őt lekérdező AQUADAT készüléknek.
 - Műszaki adatok - Bekötés - Érzékelők - Levegő tisztítású ph armatúra - Nyomás alatt szerelhető ph armatúra Rádiókommunikációval is Az adatokat szabad rádiófrekvencián sugározza az őt lekérdező AQUADAT
- Műszaki adatok - Bekötés - Érzékelők - Levegő tisztítású ph armatúra - Nyomás alatt szerelhető ph armatúra Rádiókommunikációval is Az adatokat szabad rádiófrekvencián sugározza az őt lekérdező AQUADAT
X. ANALÓG JELEK ILLESZTÉSE DIGITÁLIS ESZKÖZÖKHÖZ
 X. ANALÓG JELEK ILLESZTÉSE DIGITÁLIS ESZKÖZÖKHÖZ Ma az analóg jelek feldolgozása (is) mindinkább digitális eszközökkel és módszerekkel történik. A feldolgozás előtt az analóg jeleket digitalizálni kell.
X. ANALÓG JELEK ILLESZTÉSE DIGITÁLIS ESZKÖZÖKHÖZ Ma az analóg jelek feldolgozása (is) mindinkább digitális eszközökkel és módszerekkel történik. A feldolgozás előtt az analóg jeleket digitalizálni kell.
SYS700-A Digitális szabályozó és vezérlõ modul DDC rendszerelemek, DIALOG-III család. Terméktámogatás:
 DDC rendszerelemek, DIALOG-III család KIVITEL ALKALMAZÁS A SYS00-A a Dialog-III készülékcsalád analóg jelek kezelésére alkalmas tagja, amely kifejezetten épületgépészeti szabályozási és vezérlési feladatok
DDC rendszerelemek, DIALOG-III család KIVITEL ALKALMAZÁS A SYS00-A a Dialog-III készülékcsalád analóg jelek kezelésére alkalmas tagja, amely kifejezetten épületgépészeti szabályozási és vezérlési feladatok
Robotika. Relatív helymeghatározás Odometria
 Robotika Relatív helymeghatározás Odometria Differenciális hajtás c m =πd n /nc e c m D n C e n = hány mm-t tesz meg a robot egy jeladó impulzusra = névleges kerék átmérő = jeladó fölbontása (impulzus/ford.)
Robotika Relatív helymeghatározás Odometria Differenciális hajtás c m =πd n /nc e c m D n C e n = hány mm-t tesz meg a robot egy jeladó impulzusra = névleges kerék átmérő = jeladó fölbontása (impulzus/ford.)
Elektronika alapjai. Témakörök 11. évfolyam
 Elektronika alapjai Témakörök 11. évfolyam Négypólusok Aktív négypólusok. Passzív négypólusok. Lineáris négypólusok. Nemlineáris négypólusok. Négypólusok paraméterei. Impedancia paraméterek. Admittancia
Elektronika alapjai Témakörök 11. évfolyam Négypólusok Aktív négypólusok. Passzív négypólusok. Lineáris négypólusok. Nemlineáris négypólusok. Négypólusok paraméterei. Impedancia paraméterek. Admittancia
Informatikai eszközök fizikai alapjai Lovász Béla
 Informatikai eszközök fizikai alapjai Lovász Béla Kódolás Moduláció Morzekód Mágneses tárolás merevlemezeken Modulációs eljárások típusai Kódolás A kód megállapodás szerinti jelek vagy szimbólumok rendszere,
Informatikai eszközök fizikai alapjai Lovász Béla Kódolás Moduláció Morzekód Mágneses tárolás merevlemezeken Modulációs eljárások típusai Kódolás A kód megállapodás szerinti jelek vagy szimbólumok rendszere,
MWS-3.5_E1 pont-pont adatátviteli mikrohullámú berendezés
 MWS-3.5_E1 pont-pont adatátviteli mikrohullámú berendezés A berendezés felépítése A rádiórelé berendezés osztott kivitelű: egy beltéri KF Modem egységből és egy kültéri RF konténerből áll, melyeket egy
MWS-3.5_E1 pont-pont adatátviteli mikrohullámú berendezés A berendezés felépítése A rádiórelé berendezés osztott kivitelű: egy beltéri KF Modem egységből és egy kültéri RF konténerből áll, melyeket egy
Intelligens Rendszerek Elmélete. Technikai érzékelők
 Intelligens Rendszerek Elmélete Dr. Kutor László Technikai érzékelők http://mobil.nik.bmf.hu/tantargyak/ire.html Login: ire jelszó: IRE07 IRE 3/1 Mitől okos (intelligens?) egy technika? 1. Érzékelés (érzékszervek)
Intelligens Rendszerek Elmélete Dr. Kutor László Technikai érzékelők http://mobil.nik.bmf.hu/tantargyak/ire.html Login: ire jelszó: IRE07 IRE 3/1 Mitől okos (intelligens?) egy technika? 1. Érzékelés (érzékszervek)
Informatika a valós világban: a számítógépek és környezetünk kapcsolódási lehetőségei
 Informatika a valós világban: a számítógépek és környezetünk kapcsolódási lehetőségei Dr. Gingl Zoltán SZTE, Kísérleti Fizikai Tanszék Szeged, 2000 Február e-mail : gingl@physx.u-szeged.hu 1 Az ember kapcsolata
Informatika a valós világban: a számítógépek és környezetünk kapcsolódási lehetőségei Dr. Gingl Zoltán SZTE, Kísérleti Fizikai Tanszék Szeged, 2000 Február e-mail : gingl@physx.u-szeged.hu 1 Az ember kapcsolata
Nagyfrekvenciás rendszerek elektronikája házi feladat
 Nagyfrekvenciás rendszerek elektronikája házi feladat Az elkészítendő kis adatsebességű, rövidhullámú, BPSK adóvevő felépítése a következő: Számítsa ki a vevő földelt bázisú kis zajú hangolt kollektorkörös
Nagyfrekvenciás rendszerek elektronikája házi feladat Az elkészítendő kis adatsebességű, rövidhullámú, BPSK adóvevő felépítése a következő: Számítsa ki a vevő földelt bázisú kis zajú hangolt kollektorkörös
SIOUX-RELÉ. Sioux relé modul telepítési leírás Szerkesztés MACIE0191
 SIOUX-RELÉ Sioux relé modul telepítési leírás Szerkesztés 1.2 20MACIE0191 1 Leírás 1.1 Leírás A Sioux-relé egy soros modul, amely tartalmaz egy master kártyát, amely maximum két slave kártyával bővíthető.
SIOUX-RELÉ Sioux relé modul telepítési leírás Szerkesztés 1.2 20MACIE0191 1 Leírás 1.1 Leírás A Sioux-relé egy soros modul, amely tartalmaz egy master kártyát, amely maximum két slave kártyával bővíthető.
DIGITÁLIS KOMMUNIKÁCIÓ Oktató áramkörök
 DIGITÁLIS KOMMUNIKÁCIÓ Oktató áramkörök Az elektronikus kommunikáció gyors fejlődése, és minden területen történő megjelenése, szükségessé teszi, hogy az oktatás is lépést tartson ezzel a fejlődéssel.
DIGITÁLIS KOMMUNIKÁCIÓ Oktató áramkörök Az elektronikus kommunikáció gyors fejlődése, és minden területen történő megjelenése, szükségessé teszi, hogy az oktatás is lépést tartson ezzel a fejlődéssel.
Hálózatok I. (MIN3E0IN-L) ELŐADÁS CÍME. Segédlet a gyakorlati órákhoz. 2.Gyakorlat. Göcs László
 ELŐADÁS CÍME. Segédlet a gyakorlati órákhoz. 2.Gyakorlat. Göcs László") (MIN3E0IN-L) ELŐADÁS CÍME Segédlet a gyakorlati órákhoz 2.Gyakorlat Göcs László Manchester kódolás A Manchester kódolást (Phase Encode, PE) nagyon gyakran használják, az Ethernet hálózatok ezt a kódolási
(MIN3E0IN-L) ELŐADÁS CÍME Segédlet a gyakorlati órákhoz 2.Gyakorlat Göcs László Manchester kódolás A Manchester kódolást (Phase Encode, PE) nagyon gyakran használják, az Ethernet hálózatok ezt a kódolási
7. Laboratóriumi gyakorlat KIS ELMOZDULÁSOK MÉRÉSE KAPACITÍV ÉS INDUKTÍV MÓDSZERREL
 7. Laboratóriumi gyakorlat KIS ELMOZDULÁSOK MÉRÉSE KAPACITÍV ÉS INDUKTÍV MÓDSZERREL 1. A gyakorlat célja Kis elmozulások (.1mm 1cm) mérésének bemutatása egyszerű felépítésű érzékkőkkel. Kapacitív és inuktív
7. Laboratóriumi gyakorlat KIS ELMOZDULÁSOK MÉRÉSE KAPACITÍV ÉS INDUKTÍV MÓDSZERREL 1. A gyakorlat célja Kis elmozulások (.1mm 1cm) mérésének bemutatása egyszerű felépítésű érzékkőkkel. Kapacitív és inuktív
Űrtechnológia október 24. Műholdfedélzeti energiaellátás / 2 Műholdfedélzeti szolgálati rendszerek Felügyeleti, telemetria és telekommand rendsz
 Szélessávú Hírközlés és Villamosságtan Tanszék Űrkutató Csoport Szabó József A fedélzeti energiaellátás kérdései: architektúrák, energiaegyensúly. Űrtechnológia Budapest, 2018. október 24. Űrtechnológia
Szélessávú Hírközlés és Villamosságtan Tanszék Űrkutató Csoport Szabó József A fedélzeti energiaellátás kérdései: architektúrák, energiaegyensúly. Űrtechnológia Budapest, 2018. október 24. Űrtechnológia
Mérés és adatgyűjtés
 Mérés és adatgyűjtés 4. óra Mingesz Róbert Szegedi Tudományegyetem 2012. február 27. MA - 4. óra Verzió: 2.1 Utolsó frissítés: 2012. március 12. 1/41 Tartalom I 1 Jelek 2 Mintavételezés 3 A/D konverterek
Mérés és adatgyűjtés 4. óra Mingesz Róbert Szegedi Tudományegyetem 2012. február 27. MA - 4. óra Verzió: 2.1 Utolsó frissítés: 2012. március 12. 1/41 Tartalom I 1 Jelek 2 Mintavételezés 3 A/D konverterek
AUTOMATIKAI ÉS ELEKTRONIKAI ISMERETEK KÖZÉPSZINTŰ ÍRÁSBELI VIZSGA JAVÍTÁSI-ÉRTÉKELÉSI ÚTMUTATÓ A MINTAFELADATOKHOZ
 ATOMATKA ÉS ELEKTONKA SMEETEK KÖZÉPSZNTŰ ÍÁSBEL VZSGA JAVÍTÁS-ÉTÉKELÉS ÚTMTATÓ A MNTAFELADATOKHOZ Egyszerű, rövid feladatok Maximális pontszám: 40. Egy A=,5 mm keresztmetszetű alumínium (ρ= 0,08 Ω mm /m)
ATOMATKA ÉS ELEKTONKA SMEETEK KÖZÉPSZNTŰ ÍÁSBEL VZSGA JAVÍTÁS-ÉTÉKELÉS ÚTMTATÓ A MNTAFELADATOKHOZ Egyszerű, rövid feladatok Maximális pontszám: 40. Egy A=,5 mm keresztmetszetű alumínium (ρ= 0,08 Ω mm /m)
Intelligens Rendszerek Elmélete IRE 3/51/1
 Intelligens Rendszerek Elmélete 3 IRE 3/51/1 Technikai érzékelők jellemzői és alkalmazási lehetőségei http://uni-obuda.hu/users/kutor/ IRE 3/51/2 Mitől okos (intelligens?) egy technika? 1. Érzékelés (érzékszervek)
Intelligens Rendszerek Elmélete 3 IRE 3/51/1 Technikai érzékelők jellemzői és alkalmazási lehetőségei http://uni-obuda.hu/users/kutor/ IRE 3/51/2 Mitől okos (intelligens?) egy technika? 1. Érzékelés (érzékszervek)
HSS60 ( ) típusú léptetőmotor meghajtó
 típusú léptetőmotor meghajtó") HSS60 (93.034.027) típusú léptetőmotor meghajtó Jellemzők Teljesen zárt kör Alacsony motorzaj Alacsony meghajtó és motormelegedés Gyors válaszidő, nagy motorsebesség Optikailag leválasztott ki és bemenetek
HSS60 (93.034.027) típusú léptetőmotor meghajtó Jellemzők Teljesen zárt kör Alacsony motorzaj Alacsony meghajtó és motormelegedés Gyors válaszidő, nagy motorsebesség Optikailag leválasztott ki és bemenetek
A sok jelzőtábla zavaró. Dr. Debreczeni Gábor előadása
 A sok jelzőtábla zavaró A jelzőtáblák mérete 4/2001. (I.31.) KöVim rendelet A jellemző méret 450 mm 600 mm 750 mm 900 mm 1000 mm A közlekedő személy segítése A pálya legyen egyszerű, egységes, akadálymentes,
A sok jelzőtábla zavaró A jelzőtáblák mérete 4/2001. (I.31.) KöVim rendelet A jellemző méret 450 mm 600 mm 750 mm 900 mm 1000 mm A közlekedő személy segítése A pálya legyen egyszerű, egységes, akadálymentes,
Iványi László ARM programozás. Szabó Béla 6. Óra ADC és DAC elmélete és használata
 ARM programozás 6. Óra ADC és DAC elmélete és használata Iványi László ivanyi.laszlo@stud.uni-obuda.hu Szabó Béla szabo.bela@stud.uni-obuda.hu Mi az ADC? ADC -> Analog Digital Converter Analóg jelek mintavételezéssel
ARM programozás 6. Óra ADC és DAC elmélete és használata Iványi László ivanyi.laszlo@stud.uni-obuda.hu Szabó Béla szabo.bela@stud.uni-obuda.hu Mi az ADC? ADC -> Analog Digital Converter Analóg jelek mintavételezéssel
Jegyzetelési segédlet 8.
 Jegyzetelési segédlet 8. Informatikai rendszerelemek tárgyhoz 2009 Szerkesztett változat Géczy László Billentyűzet, billentyűk szabványos elrendezése funkció billentyűk ISO nemzetközi írógép alap billentyűk
Jegyzetelési segédlet 8. Informatikai rendszerelemek tárgyhoz 2009 Szerkesztett változat Géczy László Billentyűzet, billentyűk szabványos elrendezése funkció billentyűk ISO nemzetközi írógép alap billentyűk
ELEKTROTECHNIKA-ELEKTRONIKA ELEKTROTECHNIKA
 ELEKTROTECHNIKA-ELEKTRONIKA ELEKTROTECHNIKA 1. Egyenáramú körök Követelmények, matematikai alapok, prefixumok Töltés, áramerősség Feszültség Ellenállás és vezetés. Vezetők, szigetelők Áramkör fogalma Áramköri
ELEKTROTECHNIKA-ELEKTRONIKA ELEKTROTECHNIKA 1. Egyenáramú körök Követelmények, matematikai alapok, prefixumok Töltés, áramerősség Feszültség Ellenállás és vezetés. Vezetők, szigetelők Áramkör fogalma Áramköri
Multi-20 modul. Felhasználói dokumentáció 1.1. Készítette: Parrag László. Jóváhagyta: Rubin Informatikai Zrt.
 Multi-20 modul Felhasználói dokumentáció. Készítette: Parrag László Jóváhagyta: Rubin Informatikai Zrt. 49 Budapest, Egressy út 7-2. telefon: +36 469 4020; fax: +36 469 4029 e-mail: info@rubin.hu; web:
Multi-20 modul Felhasználói dokumentáció. Készítette: Parrag László Jóváhagyta: Rubin Informatikai Zrt. 49 Budapest, Egressy út 7-2. telefon: +36 469 4020; fax: +36 469 4029 e-mail: info@rubin.hu; web:
 Szélessávú Hírközlés és Villamosságtan Tanszék Űrkutató Csoport Szabó József A fedélzeti energiaellátás kérdései: architektúrák, energiaegyensúly. Űrtechnológia Budapest, 2014. március 19. Űrtechnológia
Szélessávú Hírközlés és Villamosságtan Tanszék Űrkutató Csoport Szabó József A fedélzeti energiaellátás kérdései: architektúrák, energiaegyensúly. Űrtechnológia Budapest, 2014. március 19. Űrtechnológia
OMRON FOTOELEKTROMOS KAPCSOLÓK E3X-DA-N
 OMRON FOTOELEKTROMOS KAPCSOLÓK E3X-DA-N E3X-DA-N Nagyteljesítményû digitális fotokapcsoló száloptikához n látható a pillanatnyi érzékelési állapot abszolút értékben, illetve százalékban Nagytávolságú,
OMRON FOTOELEKTROMOS KAPCSOLÓK E3X-DA-N E3X-DA-N Nagyteljesítményû digitális fotokapcsoló száloptikához n látható a pillanatnyi érzékelési állapot abszolút értékben, illetve százalékban Nagytávolságú,
ROG4K. EM210 fogyasztásmérő áramérzékelő ( A) Előnyök. Leírás
 Előnyök. Leírás") ROG4K EM210 fogyasztásmérő áramérzékelő (20-4000 A) Leírás Az áramérzékelő működése Rogowski elven alapul, EM210 fogyasztásmérővel együtt kell használni ( EM210 72D MV5 és EM210 72D MV6 verzió) egy-két
ROG4K EM210 fogyasztásmérő áramérzékelő (20-4000 A) Leírás Az áramérzékelő működése Rogowski elven alapul, EM210 fogyasztásmérővel együtt kell használni ( EM210 72D MV5 és EM210 72D MV6 verzió) egy-két
Alapvető információk a vezetékezéssel kapcsolatban
 Alapvető információk a vezetékezéssel kapcsolatban Néhány tipp és tanács a gyors és problémamentes bekötés érdekében: Eszközeink 24 V DC tápellátást igényelnek. A Loxone link maximum 500 m hosszan vezethető
Alapvető információk a vezetékezéssel kapcsolatban Néhány tipp és tanács a gyors és problémamentes bekötés érdekében: Eszközeink 24 V DC tápellátást igényelnek. A Loxone link maximum 500 m hosszan vezethető
Roger UT-2. Kommunikációs interfész V3.0
 ROGER UT-2 1 Roger UT-2 Kommunikációs interfész V3.0 TELEPÍTŐI KÉZIKÖNYV ROGER UT-2 2 ÁLTALÁNOS LEÍRÁS Az UT-2 elektromos átalakítóként funkcionál az RS232 és az RS485 kommunikációs interfész-ek között.
ROGER UT-2 1 Roger UT-2 Kommunikációs interfész V3.0 TELEPÍTŐI KÉZIKÖNYV ROGER UT-2 2 ÁLTALÁNOS LEÍRÁS Az UT-2 elektromos átalakítóként funkcionál az RS232 és az RS485 kommunikációs interfész-ek között.
Sokcsatornás DSP alapú, komplex elektromos impedancia mérő rendszer fejlesztése
 Sokcsatornás DSP alapú, komplex elektromos impedancia mérő rendszer fejlesztése Karotázs Tudományos, Műszaki és Kereskedelmi Kft. Audiotechnika Kft. Projektbemutató előadás Elektromos Impedancia Mérésére
Sokcsatornás DSP alapú, komplex elektromos impedancia mérő rendszer fejlesztése Karotázs Tudományos, Műszaki és Kereskedelmi Kft. Audiotechnika Kft. Projektbemutató előadás Elektromos Impedancia Mérésére
Zárt mágneskörű induktív átalakítók
 árt mágneskörű induktív átalakítók zárt mágneskörű átalakítók felépítésükből következően kis elmozdulások mérésére használhatók megfelelő érzékenységgel. zárt mágneskörű induktív átalakítók mágnesköre
árt mágneskörű induktív átalakítók zárt mágneskörű átalakítók felépítésükből következően kis elmozdulások mérésére használhatók megfelelő érzékenységgel. zárt mágneskörű induktív átalakítók mágnesköre
RAY MECHANIKUS KOMPAKT HŐMENNYISÉGMÉRŐ
 ALKALMAZÁS A kompakt, mechanikus hőmennyiségmérő, fűtési és hűtési/fűtési energiafogyasztás nagy pontosságú mérésére szolgál, 5 C - 90 C mérési tartományban. Ideális arányban ötvözi a jól bevált, megbízható
ALKALMAZÁS A kompakt, mechanikus hőmennyiségmérő, fűtési és hűtési/fűtési energiafogyasztás nagy pontosságú mérésére szolgál, 5 C - 90 C mérési tartományban. Ideális arányban ötvözi a jól bevált, megbízható
Procontrol RFP-3. Műszaki adatlap. Rádiótransceiver / kontroller 433 vagy 868 MHz-re, felcsavarható SMA gumiantennával. Verzió: 4.1 2007.12.
 Procontrol RFP-3 Rádiótransceiver / kontroller 433 vagy 868 MHz-re, felcsavarható SMA gumiantennával Műszaki adatlap Verzió: 4.1 2007.12.21 1/6 Tartalomjegyzék RFP-3... 3 Rádiótransceiver / kontroller
Procontrol RFP-3 Rádiótransceiver / kontroller 433 vagy 868 MHz-re, felcsavarható SMA gumiantennával Műszaki adatlap Verzió: 4.1 2007.12.21 1/6 Tartalomjegyzék RFP-3... 3 Rádiótransceiver / kontroller
Elektronika Oszcillátorok
 8. Az oszcillátorok periodikus jelet előállító jelforrások, generátorok. Olyan áramkörök, amelyeknek csak kimenete van, bemenete nincs. Leggyakoribb jelalakok: - négyszög - szinusz A jelgenerálás alapja
8. Az oszcillátorok periodikus jelet előállító jelforrások, generátorok. Olyan áramkörök, amelyeknek csak kimenete van, bemenete nincs. Leggyakoribb jelalakok: - négyszög - szinusz A jelgenerálás alapja
Analóg-digitális átalakítás. Rencz Márta/ Ress S. Elektronikus Eszközök Tanszék
 Analóg-digitális átalakítás Rencz Márta/ Ress S. Elektronikus Eszközök Tanszék Mai témák Mintavételezés A/D átalakítók típusok D/A átalakítás 12/10/2007 2/17 A/D ill. D/A átalakítók A világ analóg, a jelfeldolgozás
Analóg-digitális átalakítás Rencz Márta/ Ress S. Elektronikus Eszközök Tanszék Mai témák Mintavételezés A/D átalakítók típusok D/A átalakítás 12/10/2007 2/17 A/D ill. D/A átalakítók A világ analóg, a jelfeldolgozás
11. Laboratóriumi gyakorlat GYORSULÁS MÉRŐK
 11. Laboratóriumi gyakorlat GYORSULÁS MÉRŐK 1. A gyakorlat célja Az ADXL10 integrált gyorsulás mérő felépitése, működése és használatának bemutatása. Centrifugális gyorsulás kimutatása, mérése és számitása
11. Laboratóriumi gyakorlat GYORSULÁS MÉRŐK 1. A gyakorlat célja Az ADXL10 integrált gyorsulás mérő felépitése, működése és használatának bemutatása. Centrifugális gyorsulás kimutatása, mérése és számitása
VSF-118 / 128 / 124 / 144 9 1U fejállomási aktív műholdas elosztók
 VSF-118 / 128 / 124 / 144 9 1U fejállomási aktív műholdas elosztók A VSF-1xx műholdas KF elosztó család, a műholdvevő LNB-ről érkező SAT KF jelek veszteség nélküli, illetve alacsony beiktatási csillapítással
VSF-118 / 128 / 124 / 144 9 1U fejállomási aktív műholdas elosztók A VSF-1xx műholdas KF elosztó család, a műholdvevő LNB-ről érkező SAT KF jelek veszteség nélküli, illetve alacsony beiktatási csillapítással
7. L = 100 mh és r s = 50 Ω tekercset 12 V-os egyenfeszültségű áramkörre kapcsolunk. Mennyi idő alatt éri el az áram az állandósult értékének 63 %-át?
 1. Jelöld H -val, ha hamis, I -vel ha igaz szerinted az állítás!...két elektromos töltés között fellépő erőhatás nagysága arányos a két töltés nagyságával....két elektromos töltés között fellépő erőhatás
1. Jelöld H -val, ha hamis, I -vel ha igaz szerinted az állítás!...két elektromos töltés között fellépő erőhatás nagysága arányos a két töltés nagyságával....két elektromos töltés között fellépő erőhatás
Gépjárművek CAN-BUSZ rendszerei
 Gépjárművek CAN-BUSZ rendszerei CAN-BUSZ rendszerek bevezető Bizonyára benned is felmerült a kérdés már, hogy miért bonyolítják meg az autógyárak a autók elektronikáját és berendezéseit, CAN-BUSZ alapú
Gépjárművek CAN-BUSZ rendszerei CAN-BUSZ rendszerek bevezető Bizonyára benned is felmerült a kérdés már, hogy miért bonyolítják meg az autógyárak a autók elektronikáját és berendezéseit, CAN-BUSZ alapú
MEMS eszközök redukált rendű modellezése a Smart Systems Integration mesterképzésben Dr. Ender Ferenc
 MEMS eszközök redukált rendű modellezése a Smart Systems Integration mesterképzésben Dr. Ender Ferenc BME Elektronikus Eszközök Tanszéke Smart Systems Integration EMMC+ Az EU által támogatott 2 éves mesterképzési
MEMS eszközök redukált rendű modellezése a Smart Systems Integration mesterképzésben Dr. Ender Ferenc BME Elektronikus Eszközök Tanszéke Smart Systems Integration EMMC+ Az EU által támogatott 2 éves mesterképzési
A KALIBRÁLÓ LABORATÓRIUM LEGJOBB MÉRÉSI KÉPESSÉGE
 MTA-MMSZ Kft. Kalibráló Laboratóriuma A KALIBRÁLÓ LABORATÓRIUM LEGJOBB MÉRÉSI KÉPESSÉGE 1. Egyenfeszültség-mérés 1.1 Egyenfeszültség-mérők 0...3 mv 1,5 µv 1.2 Egyenfeszültségű jelforrások - kalibrátorok,
MTA-MMSZ Kft. Kalibráló Laboratóriuma A KALIBRÁLÓ LABORATÓRIUM LEGJOBB MÉRÉSI KÉPESSÉGE 1. Egyenfeszültség-mérés 1.1 Egyenfeszültség-mérők 0...3 mv 1,5 µv 1.2 Egyenfeszültségű jelforrások - kalibrátorok,
Intelligens gépek elemei Bevezetés
 Intelligens gépek elemei Bevezetés A gépészet fejlődése, a mechatronika kialakulása Mi jellemezte az 1900 előtti időket? Tisztán mechanikus rendszerek Gőzgép (1769) Dinamók, egyenáramú motor (1870) Forgó
Intelligens gépek elemei Bevezetés A gépészet fejlődése, a mechatronika kialakulása Mi jellemezte az 1900 előtti időket? Tisztán mechanikus rendszerek Gőzgép (1769) Dinamók, egyenáramú motor (1870) Forgó
VTOL UAV. Inerciális mérőrendszer kiválasztása vezetőnélküli repülőeszközök számára. Árvai László, Doktorandusz, ZMNE
 Inerciális mérőrendszer kiválasztása vezetőnélküli repülőeszközök számára Árvai László, Doktorandusz, ZMNE Tartalom Fejezet Témakör 1. Vezető nélküli repülőeszközök 2. Inerciális mérőrendszerek feladata
Inerciális mérőrendszer kiválasztása vezetőnélküli repülőeszközök számára Árvai László, Doktorandusz, ZMNE Tartalom Fejezet Témakör 1. Vezető nélküli repülőeszközök 2. Inerciális mérőrendszerek feladata
Mobil Gamma-log berendezés hajtásláncának modellezése LOLIMOT használatával
 Mobil Gamma-log berendezés hajtásláncának modellezése LOLIMOT használatával Füvesi Viktor 1, Kovács Ernő 2, Jónap Károly 3, Vörös Csaba 4 1,4 tudományos s. munkatárs, 2 PhD, egyetemi docens, 3 PhD, tudományos
Mobil Gamma-log berendezés hajtásláncának modellezése LOLIMOT használatával Füvesi Viktor 1, Kovács Ernő 2, Jónap Károly 3, Vörös Csaba 4 1,4 tudományos s. munkatárs, 2 PhD, egyetemi docens, 3 PhD, tudományos
Foglalkozási napló a 20 /20. tanévre
 Foglalkozási napló a 20 /20. tanévre Mechatronikai technikus szakma gyakorlati oktatásához OKJ száma: 54 523 04 A napló vezetéséért felelős: A napló megnyitásának dátuma: A napló lezárásának dátuma: Tanulók
Foglalkozási napló a 20 /20. tanévre Mechatronikai technikus szakma gyakorlati oktatásához OKJ száma: 54 523 04 A napló vezetéséért felelős: A napló megnyitásának dátuma: A napló lezárásának dátuma: Tanulók
Bevezetés az analóg és digitális elektronikába. V. Félvezető diódák
 Bevezetés az analóg és digitális elektronikába V. Félvezető diódák Félvezető dióda Félvezetőknek nevezzük azokat az anyagokat, amelyek fajlagos ellenállása a vezetők és a szigetelők közé esik. (Si, Ge)
Bevezetés az analóg és digitális elektronikába V. Félvezető diódák Félvezető dióda Félvezetőknek nevezzük azokat az anyagokat, amelyek fajlagos ellenállása a vezetők és a szigetelők közé esik. (Si, Ge)
Mozgáselemzés MEMS alapúgyorsulás mérőadatai alapján
 Mozgáselemzés MEMS alapúgyorsulás mérőadatai alapján Nyers Szabina Konzulens: Tihanyi Attila Pázmány Péter Katolikus Egyetem Információs Technológia Kar Feladatok: Végezzen irodalom kutatást, mely tartalmazza
Mozgáselemzés MEMS alapúgyorsulás mérőadatai alapján Nyers Szabina Konzulens: Tihanyi Attila Pázmány Péter Katolikus Egyetem Információs Technológia Kar Feladatok: Végezzen irodalom kutatást, mely tartalmazza
Értékelés Összesen: 100 pont 100% = 100 pont A VIZSGAFELADAT MEGOLDÁSÁRA JAVASOLT %-OS EREDMÉNY: EBBEN A VIZSGARÉSZBEN A VIZSGAFELADAT ARÁNYA 15%.
 Az Országos Képzési Jegyzékről és az Országos Képzési Jegyzék módosításának eljárásrendjéről szóló 133/2010. (IV. 22.) Korm. rendelet alapján: Szakképesítés, szakképesítés-elágazás, rész-szakképesítés,
Az Országos Képzési Jegyzékről és az Országos Képzési Jegyzék módosításának eljárásrendjéről szóló 133/2010. (IV. 22.) Korm. rendelet alapján: Szakképesítés, szakképesítés-elágazás, rész-szakképesítés,
Nagy Gergely április 4.
 Mikrovezérlők Nagy Gergely BME EET 2012. április 4. ebook ready 1 Bevezetés Áttekintés Az elektronikai tervezés eszközei Mikroprocesszorok 2 A mikrovezérlők 3 Főbb gyártók Áttekintés A mikrovezérlők az
Mikrovezérlők Nagy Gergely BME EET 2012. április 4. ebook ready 1 Bevezetés Áttekintés Az elektronikai tervezés eszközei Mikroprocesszorok 2 A mikrovezérlők 3 Főbb gyártók Áttekintés A mikrovezérlők az
Jelgenerátorok ELEKTRONIKA_2
 Jelgenerátorok ELEKTRONIKA_2 TEMATIKA Jelgenerátorok osztályozása. Túlvezérelt erősítők. Feszültségkomparátorok. Visszacsatolt komparátorok. Multivibrátor. Pozitív visszacsatolás. Oszcillátorok. RC oszcillátorok.
Jelgenerátorok ELEKTRONIKA_2 TEMATIKA Jelgenerátorok osztályozása. Túlvezérelt erősítők. Feszültségkomparátorok. Visszacsatolt komparátorok. Multivibrátor. Pozitív visszacsatolás. Oszcillátorok. RC oszcillátorok.