Drónrajok fizikája, technológiája és alkalmazásai
|
|
|
- Katalin Dudásné
- 5 évvel ezelőtt
- Látták:
Átírás



1 Drónrajok fizikája, technológiája és alkalmazásai Vásárhelyi Gábor, PhD ELTE Biológiai Fizika Tanszék Folyamatban lévő kutatási támogatások: MTA-ELTE Statisztikus és Biológiai Fizika Kutatócsoport Bolyai János Kutatási Ösztöndíj ATOMCSILL március 17. ELTE Lágymányos 1/A, 0.83






2 hálózatok: irányíthatóság, hierarchia, adathalászat sejtek, szövetek: mintázat, szegregáció, perkoláció madarak, emlősök: szociális dinamika, vezetés szimulációk: csoportos döntés, optimális hierarchia hardver, szoftver: GPS, INS, videó robotok, drónok: vezéregyedek, autonómia 2





3 3 Milyen a csoportos mozgás?




4 4 U n i v e r z á l i s


5 5 Hatékony Önhajtott, nem egyensúlyi




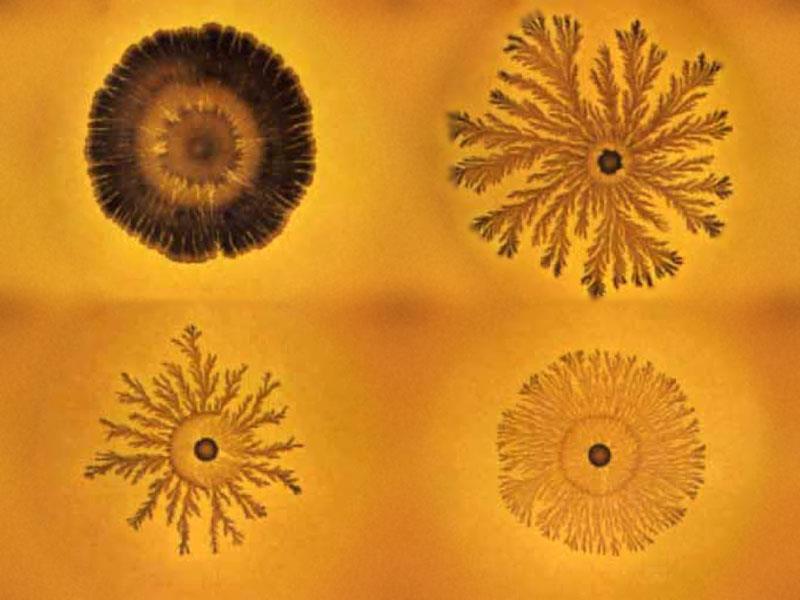
6 Egyszerűen modellezhető, mégis bonyolult 6

7 7
8 Vicsek-modell Állandó sebességű, önhajtott részecskék Sebesség irányát befolyásolja: Szomszédos részecskék sebességének iránya Zaj Vicsek, T.; Czirok, A.; Ben-Jacob, E.; Cohen, I.; Shochet, O. (1995). "Novel type of phase transition in a system of self-driven particles". Physical Review Letters 8
9 9 Kutatási irányok, kérdések Csoportos mozgás miképpen hatékony? (gyors, biztonságos, robusztus, redundáns) Információterjedés a csoportban/hálózatban Optimális csoportos döntéshozatal, csoportos viselkedés Közösségek felépítése: egyforma egyedek vezetők hierarchia Mesterséges csoportok (robotok), csoportos intelligencia
10 10 Modern technológiák az etológia szolgálatában Kamerák (jó felbontás térben és időben, automatikus képfeldolgozás, sztereo/3d) Mozgásérzékelők (VICON, gyorsulásmérő, giroszkóp, magnetométer, nyomásérzékelő) Helymeghatározók (GPS/GNSS, GSM, rádió lokátorok, RFID) Adatfeldolgozási kapacitás és sebesség
 Állatok: dominancia, erősebb kutya eszik Galambok: dominancia vs. navigáció 11")
11 Ember és állat Emberek: hierarchiák sokasága (fizikai erő, vallások, vállalatok, intézmények, sportok, stb.) Állatok: dominancia, erősebb kutya eszik Galambok: dominancia vs. navigáció 11

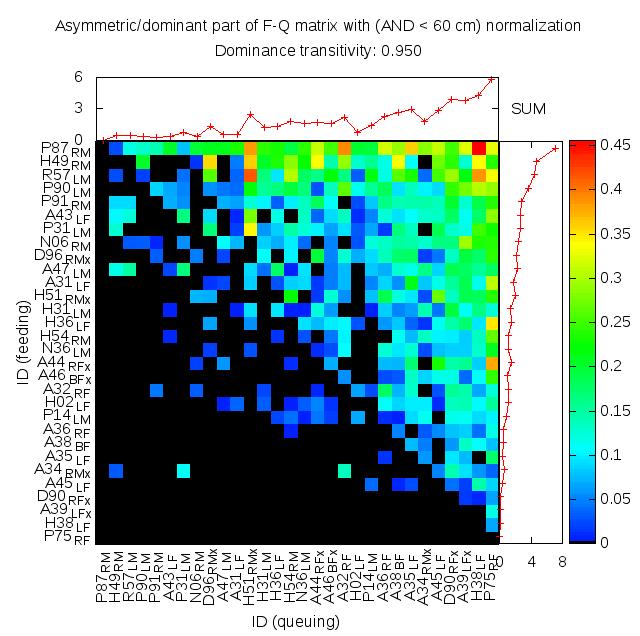
12 Automata dominancia mérés G. Vásárhelyi, Zs. Ákos, M. Nagy, D. Ábel, B. Petit, D. Biro, T. Vicsek, Novel methods for high-throughput automated ethology, Abstracts of Animal Swarms Conference, Kfar Blum, Izrael, 2013, 9-9 M. Nagy, G. Vásárhelyi, B. Pettit, I. Roberts-Mariani, D. Ábel, D. Biro, T. Vicsek, Computer vision aided quantitative analysis of the social dominance hierarchy of homing pigeons, Collective dynamics and pattern formation in active matter systems International Workshop, Drezden,



13 13 Hierarchikus tulajdonságok 30-as csoport 10-es csoport
 v (, t) j ( t' ) t' [ t")
![3s; t 3s] * ( t) ij max( Corr ij (,](/docs-images/91/106281207/images/14-1.jpg "t)) Nagy, M., Ákos, Z., Biro, D.")

14 Navigációs kompetencia mérés Corr i ij v ( t') v (, t) j ( t' ) t' [ t 3s; t 3s] * ( t) ij max( Corr ij (, t)) Nagy, M., Ákos, Z., Biro, D., & Vicsek, T., Hierarchical group dynamics in pigeon flocks, 2010 Nature 14

15 15 Stabil hierarchia 30 fős galambcsapat csoportos repülésében
: 13049-13054.")
16 16 Kontextusfüggő stabil hierarchiák FQ dominancia Csipkedésszám Navigáció M. Nagy, G. Vásárhelyi, B. Pettit, I. Roberts-Mariani, T. Vicsek, D. Biro, Contextdependent hierarchies in pigeons, PNAS, 110 (32): (2013)
17 17 (E)qual radius (P)arallel path
 Parallel path:")




18 Equal radius: m=1 ( / ) Parallel path: m=0 ( ) M. Yomosa, T. Mizuguchi, G. Vásárhelyi and M. Nagy, Coordinated Behaviour in Pigeon Flocks, PLoS ONE, Public Library of Science, 10, Paper e (2015) 18

19 19 Új logger = drón autopilóta GPS, gyorsulásmérő, giroszkóp, mágneses iránytű, nyomásmérő, hőmérő Vezetéknélküli kommunikáció Onboard miniszámítógép, Linux, valós idejű adatelemzés 6x6 cm, 100 g
20 20 Építsünk drón csapatot, ami autonóm (központi irányítás nélkül repül) skálázható, meta egyedként irányítható, feladatokat önszerveződően old meg bio-inspirált: Mit vehetünk át az állatvilág csoportos mozgásából? minket is inspirál: Mit tanítanak nekünk a drónok az állatok mozgásáról?






21 GPS, XBee (szem, fül+hang) AutoPilot (agytörzs) RC (kéz) 21
22 Flocking algoritmus alapok Nagy hatótávú vonzás: aki messze van, a csapat felé megy Közepes hatótávú irányillesztés: egyensúlyi távolságban sebességeket össze kell hangolni Rövid hatótávú taszítás: ütközést el kell kerülni, túl közel taszítják egymást hibakezelés: Késleltetések, zajok, vészhelyzetek 22


23 Késleltetett infó terjedés half speed source: Lokális késleltetés = 13s / 16 egyed 0.8 sec/egyed!!! 23
24 Késleltetés + hajtás = öngerjesztett rezgés 24
25 Forgalmi dugók ok nélkül? 25

26 Késleltetés okozta oszcillációk 26
27 27 Probléma #2: minden zajos Belső zajok GPS hiba: ~2-3 m pozíció, ~0.3 m/s sebesség Zajos érzékelők (magasság, gyorsulás, szögsebesség) Irány/állásszög hiba (GPS + INS fúzióból) Külső zajok Szél, termikek Légnyomás, hőmérséklet Napkitörések
 x i trg x COM v trg = αv 0 f x trg x COM x trg x COM i v track = v 0 i v COM i v COM i + v trg i if v i COM + v trg i v COM sima függvény + türelmi zóna + véges")
28 28 Az egyetlen egyenlet dia i a pot = D xj x i x j x i r 0 x j x i, if x j x i < r 0 j i 0 otherwise, taszítás (gerjesztő) i a damp = C j i i v COM = βv 0 f x COM x i x COM x i x COM x i vonzás v j v i x j x i 2 illeszkedés (csillapító) x i trg x COM v trg = αv 0 f x trg x COM x trg x COM i v track = v 0 i v COM i v COM i + v trg i if v i COM + v trg i v COM sima függvény + türelmi zóna + véges gyorsulás i + v trg otherwise i + v trg > v 0 formáció + célpont követés v i t + t = v i t + 1 τ v i track v i i i t t + a pot t + a damp t
29 Technikai kihívások Akkumulátor propeller motor méret repülési idő teherbírás számítási kapacitás képességek ár idő közös optimalizációja Teljes autonómia kényszer: felszállás, leszállás, ütközéselkerülés, hibamentes kód, optimális hibakezelés: repülési zóna, kommunikáció, hardver hibák, vészleszállás stb. Késleltetések minimalizálása, kommunikáció maximalizálása, paraméterek optimalizálása Sokdrónos (skálázható) repülési logisztika 29
: Paper 025012. (2014), arxiv preprint arxiv:1310.3601 G. Vásárhelyi, Cs. Virágh, N. Tarcai, T. Szörényi, G. Somorjai, T.")
30 2-szintű hierarchia: célpont követés (valós adatok vizualizációja) Virágh, Cs.; Vásárhelyi, G.; Tarcai, N.; Szörényi, T.; Somorjai, G.; Nepusz, T. & Vicsek, T. Flocking algorithm for autonomous flying robots, Bioinspir. Biomim., 9 (2): Paper (2014), arxiv preprint arxiv: G. Vásárhelyi, Cs. Virágh, N. Tarcai, T. Szörényi, G. Somorjai, T. Nepusz and T. Vicsek, Outdoor flocking and formation flight with autonomous aerial robots, Intelligent Robots and Systems (IROS 2014), 2014 IEEE/RSJ International Conference on, Sept. 2014, pp
: Paper 025012. (2014), arxiv preprint arxiv:1310.3601 G. Vásárhelyi, Cs. Virágh, N. Tarcai, T. Szörényi, G. Somorjai, T. Nepusz and T.")
31 Csoportos célpont követés Virágh, Cs.; Vásárhelyi, G.; Tarcai, N.; Szörényi, T.; Somorjai, G.; Nepusz, T. & Vicsek, T. Flocking algorithm for autonomous flying robots, Bioinspir. Biomim., 9 (2): Paper (2014), arxiv preprint arxiv: G. Vásárhelyi, Cs. Virágh, N. Tarcai, T. Szörényi, G. Somorjai, T. Nepusz and T. Vicsek, Outdoor flocking and formation flight with autonomous aerial robots, Intelligent Robots and Systems (IROS 2014), 2014 IEEE/RSJ International Conference on, Sept. 2014, pp
: Paper 025012. (2014), arxiv preprint arxiv:1310.3601 G.")
, 2014")
32 Alakzatrepülési feladatok Virágh, Cs.; Vásárhelyi, G.; Tarcai, N.; Szörényi, T.; Somorjai, G.; Nepusz, T. & Vicsek, T. Flocking algorithm for autonomous flying robots, Bioinspir. Biomim., 9 (2): Paper (2014), arxiv preprint arxiv: G. Vásárhelyi, Cs. Virágh, N. Tarcai, T. Szörényi, G. Somorjai, T. Nepusz and T. Vicsek, Outdoor flocking and formation flight with autonomous aerial robots, Intelligent Robots and Systems (IROS 2014), 2014 IEEE/RSJ International Conference on, Sept. 2014, pp

33 Csoportos objektum elkerülés 33





34 Csoportos üldözés-menekülés M. Janosov, Cs. Viragh, G. Vasarhelyi and T. Vicsek, Chasing strategies of a flock of drones, Principles of Multi-Robot Systems, Robotics: Science and Systems (RSS) 2015




35 SPP zárt térben, skálázhatóság Virágh, Cs.; Vásárhelyi, G.; Tarcai, N.; Szörényi, T.; Somorjai, G.; Nepusz, T. & Vicsek, T. Flocking algorithm for autonomous flying robots, Bioinspir. Biomim., 9 (2): Paper (2014), arxiv preprint arxiv:

36 Cs. Virágh, G. Vásárhelyi, M. Nagy, W. Aguilar, C. Gershenson and T. Vicsek, Effectiveness of threedimensional traffic algorithms under realistic conditions, MECO 40, March 2015, Esztergom, Hungary Cs. Virágh, M. Nagy, C. Gershenson and G. Vásárhelyi, Self-organized UAV Traffic in Realistic Environments, submitted to IROS






37 37 Automatizált alkalmazások Csoportos megfigyelés keresés, beavatkozás: Mezőgazdasági monitorozás Mentőakciók, katasztrófavédelem Ipari felhasználás (épület, gázvezeték, vagyonv.) Hasznos teher szállítás Művészet, látvány, show Katonai alkalmazások?





38 multi-drone services entertainment advertisement aerial filming monitoring, inspection, surveillance Partners and investors are welcome!




39
 Bolyai János Kutatási Ösztöndíj BO/00219/15/6 (2015-) http://hal.elte.hu/flocking vasarhelyi@hal.elte.hu 40")
40 EU ERC COLLMOT ( ) MTA-ELTE Statisztikus és Biológiai Fizika Kutatócsoport (2012-) Magyary Zoltán Posztdok. Ösztöndíj, TÁMOP A/ ( ) Bolyai János Kutatási Ösztöndíj BO/00219/15/6 (2015-) 40
41 Üdv a csapatban? motiváltság, önálló feladatmegoldó képesség, angol nyelv fizikus/mérnök/informatikus szemlélet és tudás, statisztikus fizika, adatfeldolgozás, HW fejlesztés, programozás, computer vision, robotika, stb. látás alapú navigáció és döntéshozatal, elosztott érzékelés, hardware-in-the-loop szimulációk multi-agent realisztikus szimulációk, collision avoidance, obstacle avoidance, dense traffic, collective problem solving, heterogeneity, hierarchy etc. Drone-show elemek (alakzatok, kötelékek, látványos pályák, dinamika, központi/elosztott irányítás, tervezés és önszerveződés optimális aránya) terepi mérések, drón(csapat) irányítás, mezőgazdasági adatfeldolgozás, teljes automatizálás 41
Csoportos viselkedés és automatizált etológia
 Csoportos viselkedés és automatizált etológia Vásárhelyi Gábor, PhD ELTE Biológiai Fizika Tanszék StatFiz Szeminárium, 2014. május 14. hálózatok: irányíthatóság, hierarchia, adathalászat sejtek, szövetek:
Csoportos viselkedés és automatizált etológia Vásárhelyi Gábor, PhD ELTE Biológiai Fizika Tanszék StatFiz Szeminárium, 2014. május 14. hálózatok: irányíthatóság, hierarchia, adathalászat sejtek, szövetek:
Mit tanulhatunk a madarak csoportos és s egyéni repüléséből?
 Mit tanulhatunk a madarak csoportos és s egyéni repüléséből? l? Nagy MátéM - ELTE Biológiai Fizika Tanszék http://angel.elte.hu/~nagymate 2009. 03. 12. Nagy Máté 1 Munkatársak: Ákos Zsuzsa, Szabó Péter,
Mit tanulhatunk a madarak csoportos és s egyéni repüléséből? l? Nagy MátéM - ELTE Biológiai Fizika Tanszék http://angel.elte.hu/~nagymate 2009. 03. 12. Nagy Máté 1 Munkatársak: Ákos Zsuzsa, Szabó Péter,
VTOL UAV. Inerciális mérőrendszer kiválasztása vezetőnélküli repülőeszközök számára. Árvai László, Doktorandusz, ZMNE
 Inerciális mérőrendszer kiválasztása vezetőnélküli repülőeszközök számára Árvai László, Doktorandusz, ZMNE Tartalom Fejezet Témakör 1. Vezető nélküli repülőeszközök 2. Inerciális mérőrendszerek feladata
Inerciális mérőrendszer kiválasztása vezetőnélküli repülőeszközök számára Árvai László, Doktorandusz, ZMNE Tartalom Fejezet Témakör 1. Vezető nélküli repülőeszközök 2. Inerciális mérőrendszerek feladata
Beltéri autonóm négyrotoros helikopter szabályozó rendszerének kifejlesztése és hardware-in-the-loop tesztelése
 Beltéri autonóm négyrotoros helikopter szabályozó rendszerének kifejlesztése és hardware-in-the-loop tesztelése Regula Gergely, Lantos Béla BME Villamosmérnöki és Informatikai Kar Irányítástechnika és
Beltéri autonóm négyrotoros helikopter szabályozó rendszerének kifejlesztése és hardware-in-the-loop tesztelése Regula Gergely, Lantos Béla BME Villamosmérnöki és Informatikai Kar Irányítástechnika és
Hőkamerás drónok alkalmazása az épületfelmérésben
 Official reseller Hőkamerás drónok alkalmazása az épületfelmérésben Weszelovits Gergő GLT Scan&Plan Kft. www.gltscan.hu www.gltdrone.com 3D felmérések drónnal és lézerszkennerrel Röviden a GLT Scan&Plan-ről
Official reseller Hőkamerás drónok alkalmazása az épületfelmérésben Weszelovits Gergő GLT Scan&Plan Kft. www.gltscan.hu www.gltdrone.com 3D felmérések drónnal és lézerszkennerrel Röviden a GLT Scan&Plan-ről
R3-COP. Resilient Reasoning Robotic Co-operating Systems. Autonóm rendszerek tesztelése egy EU-s projektben
 ARTEMIS Joint Undertaking The public private partnership in embedded systems R3-COP Resilient Reasoning Robotic Co-operating Systems Autonóm rendszerek tesztelése egy EU-s projektben Micskei Zoltán Budapesti
ARTEMIS Joint Undertaking The public private partnership in embedded systems R3-COP Resilient Reasoning Robotic Co-operating Systems Autonóm rendszerek tesztelése egy EU-s projektben Micskei Zoltán Budapesti
Valószínűségi modellellenőrzés Markov döntési folyamatokkal
 Valószínűségi modellellenőrzés Markov döntési folyamatokkal Hajdu Ákos Szoftver verifikáció és validáció 2015.12.09. Budapesti Műszaki és Gazdaságtudományi Egyetem Méréstechnika és Információs Rendszerek
Valószínűségi modellellenőrzés Markov döntési folyamatokkal Hajdu Ákos Szoftver verifikáció és validáció 2015.12.09. Budapesti Műszaki és Gazdaságtudományi Egyetem Méréstechnika és Információs Rendszerek
Intelligens közlekedési rendszer alkalmazásokkal a közlekedésbiztonság javításáért
 Új évtized, új kihívások a közlekedésbiztonságban közúti közlekedésbiztonsági konferencia Intelligens közlekedési rendszer alkalmazásokkal a közlekedésbiztonság javításáért Szűcs Lajos elnök ITS Hungary
Új évtized, új kihívások a közlekedésbiztonságban közúti közlekedésbiztonsági konferencia Intelligens közlekedési rendszer alkalmazásokkal a közlekedésbiztonság javításáért Szűcs Lajos elnök ITS Hungary
SZENZORFÚZIÓS ELJÁRÁSOK KIDOLGOZÁSA AUTONÓM JÁRMŰVEK PÁLYAKÖVETÉSÉRE ÉS IRÁNYÍTÁSÁRA
 infokommunikációs technológiák SZENZORFÚZIÓS ELJÁRÁSOK KIDOLGOZÁSA AUTONÓM JÁRMŰVEK PÁLYAKÖVETÉSÉRE ÉS IRÁNYÍTÁSÁRA BEVEZETŐ A KUTATÁS CÉLJA Autonóm járművek és robotok esetén elsődleges feladat a robotok
infokommunikációs technológiák SZENZORFÚZIÓS ELJÁRÁSOK KIDOLGOZÁSA AUTONÓM JÁRMŰVEK PÁLYAKÖVETÉSÉRE ÉS IRÁNYÍTÁSÁRA BEVEZETŐ A KUTATÁS CÉLJA Autonóm járművek és robotok esetén elsődleges feladat a robotok
Mozgásmodellezés. Lukovszki Csaba. Navigációs és helyalapú szolgáltatások és alkalmazások (VITMMA07)
") TÁVKÖZLÉSI ÉS MÉDIAINFORMATIKAI TANSZÉK () BUDAPESTI MŰSZAKI ÉS GAZDASÁGTUDOMÁNYI EGYETEM (BME) Mozgásmodellezés Lukovszki Csaba Áttekintés» Probléma felvázolása» Szabadsági fokok» Diszkretizált» Hibát
TÁVKÖZLÉSI ÉS MÉDIAINFORMATIKAI TANSZÉK () BUDAPESTI MŰSZAKI ÉS GAZDASÁGTUDOMÁNYI EGYETEM (BME) Mozgásmodellezés Lukovszki Csaba Áttekintés» Probléma felvázolása» Szabadsági fokok» Diszkretizált» Hibát
Ember és robot együttműködése a gyártásban Ipar 4.0
 Helyszín: MTA Székház, Felolvasóterem Időpont: 2017. November 7. Ember és robot együttműködése a gyártásban Ipar 4.0 Dr. Erdős Ferenc Gábor MTA SZTAKI Fejlett robotika ígérete A fejlett robotika és az
Helyszín: MTA Székház, Felolvasóterem Időpont: 2017. November 7. Ember és robot együttműködése a gyártásban Ipar 4.0 Dr. Erdős Ferenc Gábor MTA SZTAKI Fejlett robotika ígérete A fejlett robotika és az
Etológia Emelt A viselkedés mérése. Miklósi Ádám egyetemi tanár ELTE TTK Etológia Tanszék 2018
 Etológia Emelt A viselkedés mérése Miklósi Ádám egyetemi tanár ELTE TTK Etológia Tanszék 2018 amiklosi62@gmail.com A viselkedés leírása: A viselkedés, mint fenotipikus jellemző Viselkedés: Élő szervezetek
Etológia Emelt A viselkedés mérése Miklósi Ádám egyetemi tanár ELTE TTK Etológia Tanszék 2018 amiklosi62@gmail.com A viselkedés leírása: A viselkedés, mint fenotipikus jellemző Viselkedés: Élő szervezetek
UAV FEJLESZTÉSEK ÉS KUTATÁS AZ MTA SZTAKI-BAN
 UAV FEJLESZTÉSEK ÉS KUTATÁS AZ MTA SZTAKI-BAN Bokor József (bokor@sztaki.hu), Vanek Bálint, Bauer Péter (bauer.peter@sztaki.hu ) MTA-SZTAKI, Rendszer- és Irányításelméleti Kutatólaboratórium Automatikus
UAV FEJLESZTÉSEK ÉS KUTATÁS AZ MTA SZTAKI-BAN Bokor József (bokor@sztaki.hu), Vanek Bálint, Bauer Péter (bauer.peter@sztaki.hu ) MTA-SZTAKI, Rendszer- és Irányításelméleti Kutatólaboratórium Automatikus
ROBOT IRÁNYÍTÁS INFRAVÖRÖS LED TÖMBBEL
 TÁMOP-4.2.2.C-11/1/KONV-212-4 infokommunikációs technológiák ROBOT IRÁNYÍTÁS INFRAVÖRÖS LED TÖMBBEL A KUTATÁSI TERÜLET RÖVID MEGFOGALMAZÁSA TÁMOP-4.2.2.C-11/1/KONV-212-4 Célok: Növekvő érdeklődés a non-boolean
TÁMOP-4.2.2.C-11/1/KONV-212-4 infokommunikációs technológiák ROBOT IRÁNYÍTÁS INFRAVÖRÖS LED TÖMBBEL A KUTATÁSI TERÜLET RÖVID MEGFOGALMAZÁSA TÁMOP-4.2.2.C-11/1/KONV-212-4 Célok: Növekvő érdeklődés a non-boolean
VTOL UAV. Moduláris fedélzeti elektronika fejlesztése pilóta nélküli repülőgépek számára. Árvai László, Doktorandusz, ZMNE ÁRVAI LÁSZLÓ, ZMNE
 Moduláris fedélzeti elektronika fejlesztése pilóta nélküli repülőgépek számára Árvai László, Doktorandusz, ZMNE Tartalom Fejezet Témakör 1. Fedélzeti elektronika tulajdonságai 2. Modularitás 3. Funkcionális
Moduláris fedélzeti elektronika fejlesztése pilóta nélküli repülőgépek számára Árvai László, Doktorandusz, ZMNE Tartalom Fejezet Témakör 1. Fedélzeti elektronika tulajdonságai 2. Modularitás 3. Funkcionális
Sebességkorrelációk kollektíven mozgó élő rendszerekben
 Sebességkorrelációk kollektíven mozgó élő rendszerekben A doktori értekezés tézisei Ákos Zsuzsa Biológiai Fizika Tanszék, Eötvös Loránd Tudományegyetem Témavezető: Prof. Vicsek Tamás, MTA rendes tagja
Sebességkorrelációk kollektíven mozgó élő rendszerekben A doktori értekezés tézisei Ákos Zsuzsa Biológiai Fizika Tanszék, Eötvös Loránd Tudományegyetem Témavezető: Prof. Vicsek Tamás, MTA rendes tagja
Távérzékelés a precíziós gazdálkodás szolgálatában : látvány vagy tudomány. Verőné Dr. Wojtaszek Malgorzata
 Távérzékelés a precíziós gazdálkodás szolgálatában : látvány vagy tudomány Verőné Dr. Wojtaszek Malgorzata Az előadás felépítése Trendek a Föld megfigyelésében (hol kezdődött, merre tart ) Távérzékelés
Távérzékelés a precíziós gazdálkodás szolgálatában : látvány vagy tudomány Verőné Dr. Wojtaszek Malgorzata Az előadás felépítése Trendek a Föld megfigyelésében (hol kezdődött, merre tart ) Távérzékelés
Takács Árpád K+F irányok
 Takács Árpád K+F irányok 2016. 06. 09. arpad.takacs@adasworks.com A jövőre tervezünk Az AdasWorks mesterséges intelligencia alapú szoftverterfejlesztéssel és teljes önvezető megoldásokkal forradalmasítja
Takács Árpád K+F irányok 2016. 06. 09. arpad.takacs@adasworks.com A jövőre tervezünk Az AdasWorks mesterséges intelligencia alapú szoftverterfejlesztéssel és teljes önvezető megoldásokkal forradalmasítja
5G technológiák és felhasználási esetek
 5G technológiák és felhasználási esetek Bendek Kovács (Senior Specialist, Network Performance, Ericsson) Mivel foglalkozik az Ericsson? Rádiós hozzáférési hálózatok Felhő szerverparkok építése Telekommunikációs
5G technológiák és felhasználási esetek Bendek Kovács (Senior Specialist, Network Performance, Ericsson) Mivel foglalkozik az Ericsson? Rádiós hozzáférési hálózatok Felhő szerverparkok építése Telekommunikációs
Internet of Things és Ipar 4.0 az agrárszektorban. Tarcsi Ádám, ELTE Informatikai Kar
 Internet of Things és Ipar 4.0 az agrárszektorban Tarcsi Ádám, ELTE Informatikai Kar ade@inf.elte.hu Ipar 4.0 a 4. ipari forradalom 18. század vége gőzgép, szövőgép, a mechanikus gépek 20. század eleje
Internet of Things és Ipar 4.0 az agrárszektorban Tarcsi Ádám, ELTE Informatikai Kar ade@inf.elte.hu Ipar 4.0 a 4. ipari forradalom 18. század vége gőzgép, szövőgép, a mechanikus gépek 20. század eleje
Kísérleti üzemek az élelmiszeriparban alkalmazható fejlett gépgyártás-technológiai megoldások kifejlesztéséhez, kipróbálásához és oktatásához
 1 Nemzeti Workshop Kísérleti üzemek az élelmiszeriparban alkalmazható fejlett gépgyártás-technológiai megoldások kifejlesztéséhez, kipróbálásához és oktatásához Berczeli Attila Campden BRI Magyarország
1 Nemzeti Workshop Kísérleti üzemek az élelmiszeriparban alkalmazható fejlett gépgyártás-technológiai megoldások kifejlesztéséhez, kipróbálásához és oktatásához Berczeli Attila Campden BRI Magyarország
Tisztán kivehetı tendencia: kommunikációs hálózatok egyre bonyolultabbakká válnak Hálózat bonyolultsága
 @ Budapest University of Technology and Economics Nagy hálózatok evolúciója Gulyás András, Heszberger Zalán High Speed Networks Laboratory Internet trendek Tisztán kivehetı tendencia: kommunikációs hálózatok
@ Budapest University of Technology and Economics Nagy hálózatok evolúciója Gulyás András, Heszberger Zalán High Speed Networks Laboratory Internet trendek Tisztán kivehetı tendencia: kommunikációs hálózatok
Kémiai reakciók mechanizmusa számítógépes szimulációval
 Kémiai reakciók mechanizmusa számítógépes szimulációval Stirling András stirling@chemres.hu Elméleti Kémiai Osztály Budapest Stirling A. (MTA Kémiai Kutatóközpont) Reakciómechanizmus szimulációból 2007.
Kémiai reakciók mechanizmusa számítógépes szimulációval Stirling András stirling@chemres.hu Elméleti Kémiai Osztály Budapest Stirling A. (MTA Kémiai Kutatóközpont) Reakciómechanizmus szimulációból 2007.
A megerosítéses tanulás és a szimulált hutés kombinált használata: algoritmusok és alkalmazások
 MISKOLCI EGYETEM DOKTORI (PH.D.) TÉZISFÜZETEI HATVANY JÓZSEF INFORMATIKAI TUDOMÁNYOK DOKTORI ISKOLA A megerosítéses tanulás és a szimulált hutés kombinált használata: algoritmusok és alkalmazások Készítette:
MISKOLCI EGYETEM DOKTORI (PH.D.) TÉZISFÜZETEI HATVANY JÓZSEF INFORMATIKAI TUDOMÁNYOK DOKTORI ISKOLA A megerosítéses tanulás és a szimulált hutés kombinált használata: algoritmusok és alkalmazások Készítette:
2 cm-es pontosság, a terep érintése nélkül
 Megismerni a feladatot, megtalálni az eszközt! 2 cm-es pontosság, a terep érintése nélkül Magyar Földmérési, Térképészeti és Távérzékelési Társaság 30. Vándorgyűlés Szolnok 2015. Július 3. Bartha Csaba
Megismerni a feladatot, megtalálni az eszközt! 2 cm-es pontosság, a terep érintése nélkül Magyar Földmérési, Térképészeti és Távérzékelési Társaság 30. Vándorgyűlés Szolnok 2015. Július 3. Bartha Csaba
A Jövő Internet kihívásai A jövő információs és kommunikációs technológiai MTA TRB és IB közös tudományos ülés november 17.
 A Jövő Internet kihívásai A jövő információs és kommunikációs technológiai MTA TRB és IB közös tudományos ülés 2010. november 17. Dr. Szabó Róbert, e. docens Nagysebességű Hálózatok Laboratorium (HSNLab)
A Jövő Internet kihívásai A jövő információs és kommunikációs technológiai MTA TRB és IB közös tudományos ülés 2010. november 17. Dr. Szabó Róbert, e. docens Nagysebességű Hálózatok Laboratorium (HSNLab)
ÉRZÉKELŐK ÉS BEAVATKOZÓK I. 0. TANTÁRGY ISMERTETŐ
 ÉRZÉKELŐK ÉS BEAVATKOZÓK I. 0. TANTÁRGY ISMERTETŐ Dr. Soumelidis Alexandros 2018.09.06. BME KÖZLEKEDÉSMÉRNÖKI ÉS JÁRMŰMÉRNÖKI KAR 32708-2/2017/INTFIN SZÁMÚ EMMI ÁLTAL TÁMOGATOTT TANANYAG A tárgy célja
ÉRZÉKELŐK ÉS BEAVATKOZÓK I. 0. TANTÁRGY ISMERTETŐ Dr. Soumelidis Alexandros 2018.09.06. BME KÖZLEKEDÉSMÉRNÖKI ÉS JÁRMŰMÉRNÖKI KAR 32708-2/2017/INTFIN SZÁMÚ EMMI ÁLTAL TÁMOGATOTT TANANYAG A tárgy célja
BME IPAR 4.0 TECHNOLÓGIAI KÖZPONT. Kovács László
 BME IPAR 4.0 TECHNOLÓGIAI KÖZPONT Kovács László RÓLUNK - BME Építőmérnöki Kar (ÉMK) - 1782 Gépészmérnöki Kar (GPK) - 1871 Építészmérnöki Kar (ÉPK) - 1873 Vegyészmérnöki és Biomérnöki Kar (VBK) - 1873 Villamosmérnöki
BME IPAR 4.0 TECHNOLÓGIAI KÖZPONT Kovács László RÓLUNK - BME Építőmérnöki Kar (ÉMK) - 1782 Gépészmérnöki Kar (GPK) - 1871 Építészmérnöki Kar (ÉPK) - 1873 Vegyészmérnöki és Biomérnöki Kar (VBK) - 1873 Villamosmérnöki
VL IT i n du s t ri al Kommunikációs vázlat
 VL IT i n du s t ri al Kommunikációs vázlat k i v it e l A műszaki adatok előzetes ér tesítés nélkül változhatnak. A műszaki adatok előzetes értesítés nélkül változhatnak. VLIT TAG A1 WB ATEX Aktív RFID
VL IT i n du s t ri al Kommunikációs vázlat k i v it e l A műszaki adatok előzetes ér tesítés nélkül változhatnak. A műszaki adatok előzetes értesítés nélkül változhatnak. VLIT TAG A1 WB ATEX Aktív RFID
Élettartam teszteknél alkalmazott programstruktúra egy váltóvezérlő példáján keresztül
 Élettartam teszteknél alkalmazott programstruktúra egy váltóvezérlő példáján keresztül 1 Tartalom Miről is lesz szó? Bosch GS-TC Automata sebességváltó TCU (Transmission Control Unit) Élettartam tesztek
Élettartam teszteknél alkalmazott programstruktúra egy váltóvezérlő példáján keresztül 1 Tartalom Miről is lesz szó? Bosch GS-TC Automata sebességváltó TCU (Transmission Control Unit) Élettartam tesztek
Informatika a valós világban: a számítógépek és környezetünk kapcsolódási lehetőségei
 Informatika a valós világban: a számítógépek és környezetünk kapcsolódási lehetőségei Dr. Gingl Zoltán SZTE, Kísérleti Fizikai Tanszék Szeged, 2000 Február e-mail : gingl@physx.u-szeged.hu 1 Az ember kapcsolata
Informatika a valós világban: a számítógépek és környezetünk kapcsolódási lehetőségei Dr. Gingl Zoltán SZTE, Kísérleti Fizikai Tanszék Szeged, 2000 Február e-mail : gingl@physx.u-szeged.hu 1 Az ember kapcsolata
Mobil technológiák és alkalmazások
 ELTE-Soft kft Mobil technológiák és alkalmazások A kutatás-fejlesztési központok fejlesztése és megerősítése KMOP-1.1.2-08/1-2008-0002 pályázat Lőrincz András ELTE Informatikai Kar Mobil technológiák Mozog
ELTE-Soft kft Mobil technológiák és alkalmazások A kutatás-fejlesztési központok fejlesztése és megerősítése KMOP-1.1.2-08/1-2008-0002 pályázat Lőrincz András ELTE Informatikai Kar Mobil technológiák Mozog
A LEGO Mindstorms EV3 programozása
 A LEGO Mindstorms EV3 programozása 1. A fejlesztői környezet bemutatása 12. Az MPU6050 gyorsulás- és szögsebességmérő szenzor Orosz Péter 1 Felhasznált irodalom LEGO MINDSTORMS EV3: Felhasználói útmutató
A LEGO Mindstorms EV3 programozása 1. A fejlesztői környezet bemutatása 12. Az MPU6050 gyorsulás- és szögsebességmérő szenzor Orosz Péter 1 Felhasznált irodalom LEGO MINDSTORMS EV3: Felhasználói útmutató
DRÓNOK HASZNÁLATA A MEZŐGAZDASÁGBAN
 DRÓNOK HASZNÁLATA A MEZŐGAZDASÁGBAN KÖRÖSPARTI JÁNOS NAIK Öntözési és Vízgazdálkodási Önálló Kutatási Osztály (ÖVKI) Szaktanári továbbképzés Szarvas, 2017. december 7. A drónok használata egyre elterjedtebb
DRÓNOK HASZNÁLATA A MEZŐGAZDASÁGBAN KÖRÖSPARTI JÁNOS NAIK Öntözési és Vízgazdálkodási Önálló Kutatási Osztály (ÖVKI) Szaktanári továbbképzés Szarvas, 2017. december 7. A drónok használata egyre elterjedtebb
Valós idejű kiberfizikai rendszerek 5G infrastruktúrában
 Valós idejű kiberfizikai rendszerek 5G infrastruktúrában dr. Kovácsházy Tamás BME-MIT khazy@mit.bme.hu 1 Kiberfizikai rendszer (CPS, Cyber-Physical System) Egy olyan elosztott, kiterjedt informatikai és
Valós idejű kiberfizikai rendszerek 5G infrastruktúrában dr. Kovácsházy Tamás BME-MIT khazy@mit.bme.hu 1 Kiberfizikai rendszer (CPS, Cyber-Physical System) Egy olyan elosztott, kiterjedt informatikai és
Intelligens Közlekedési Rendszerek 2
 Intelligens Közlekedési Rendszerek 2 Máté Miklós 2016 Október 11 1 / 14 Szenzor (érzékelő): mérés, detektálás Mérés elmélet emlékeztető Jó mérőműszer tulajdonságai Érzékeny a mérendő tulajdonságra Érzéketlen
Intelligens Közlekedési Rendszerek 2 Máté Miklós 2016 Október 11 1 / 14 Szenzor (érzékelő): mérés, detektálás Mérés elmélet emlékeztető Jó mérőműszer tulajdonságai Érzékeny a mérendő tulajdonságra Érzéketlen
Kognitív Infokommunikáció: egy ébredő interdiszciplína. Baranyi Péter DSc
 Kognitív Infokommunikáció: egy ébredő interdiszciplína Baranyi Péter DSc Távközlési és Médiainformatika Tanszék, Budapesti Műszaki és Gazdaságtudományi Egyetem *** 3D Internet alapú Kontrol és Kommunikáció
Kognitív Infokommunikáció: egy ébredő interdiszciplína Baranyi Péter DSc Távközlési és Médiainformatika Tanszék, Budapesti Műszaki és Gazdaságtudományi Egyetem *** 3D Internet alapú Kontrol és Kommunikáció
Miről lesz szó? Videó tartalom elemzés (VCA) leegyszerűsített működése Kültéri védelem Közúthálózat megfigyelés Emberszámlálás
 leegyszerűsített működése Kültéri védelem Közúthálózat megfigyelés Emberszámlálás") Videóanalitikát mindenhova! Princz Adorján Miről lesz szó? Videó tartalom elemzés (VCA) leegyszerűsített működése Kültéri védelem Közúthálózat megfigyelés Emberszámlálás VCA alapú detektorok Videótartalom
Videóanalitikát mindenhova! Princz Adorján Miről lesz szó? Videó tartalom elemzés (VCA) leegyszerűsített működése Kültéri védelem Közúthálózat megfigyelés Emberszámlálás VCA alapú detektorok Videótartalom
OPTIKAI KÖVETK VETÉS. Steiner Henriette április 29.
 OPTIKAI KÖVETK VETÉS Lehetőségek és limitáci ciók Steiner Henriette 2009. április 29. MEGISMERÉS = Érzékelés + Fogalomalkotás MEGISMERÉS = Érzékelés + Fogalomalkotás LÁTÁS = SZEM + AGY MEGISMERÉS = Érzékelés
OPTIKAI KÖVETK VETÉS Lehetőségek és limitáci ciók Steiner Henriette 2009. április 29. MEGISMERÉS = Érzékelés + Fogalomalkotás MEGISMERÉS = Érzékelés + Fogalomalkotás LÁTÁS = SZEM + AGY MEGISMERÉS = Érzékelés
Szén nanoszerkezetek grafén nanolitográfiai szimulációja
 GYŐR Szén nanoszerkezetek grafén nanolitográfiai szimulációja Dr. László István, Dr. Zsoldos Ibolya BMGE Elméleti Fizika Tanszék, SZE Anyagtudomány és Technológia Tanszék GYŐR Motiváció, előzmény: Grafén
GYŐR Szén nanoszerkezetek grafén nanolitográfiai szimulációja Dr. László István, Dr. Zsoldos Ibolya BMGE Elméleti Fizika Tanszék, SZE Anyagtudomány és Technológia Tanszék GYŐR Motiváció, előzmény: Grafén
Irányítási struktúrák összehasonlító vizsgálata. Tóth László Richárd. Pannon Egyetem Vegyészmérnöki és Anyagtudományok Doktori Iskola
 Doktori (PhD) értekezés tézisei Irányítási struktúrák összehasonlító vizsgálata Tóth László Richárd Pannon Egyetem Vegyészmérnöki és Anyagtudományok Doktori Iskola Témavezetők: Dr. Szeifert Ferenc Dr.
Doktori (PhD) értekezés tézisei Irányítási struktúrák összehasonlító vizsgálata Tóth László Richárd Pannon Egyetem Vegyészmérnöki és Anyagtudományok Doktori Iskola Témavezetők: Dr. Szeifert Ferenc Dr.
VÁNDORGYŰLÉS július 6-8.
 MFTTT, 31. VÁNDORGYŰLÉS 2017. július 6-8. Az új technológiák és a szervezeti változások hatása a magyar földmérésre és térképészetre 3D GEOSOLUTIONS HUNGARY KFT Váradi Attila: Trimble SX10: az IGAZI FÚZIÓ!
MFTTT, 31. VÁNDORGYŰLÉS 2017. július 6-8. Az új technológiák és a szervezeti változások hatása a magyar földmérésre és térképészetre 3D GEOSOLUTIONS HUNGARY KFT Váradi Attila: Trimble SX10: az IGAZI FÚZIÓ!
Intelligens Rendszerek
 Intelligens Rendszerek Robotok http://mobil.nik.uni-obuda.hu http://mobil.nik.uni-obuda.hu/tantargyak/irg/segedanyagok/ B Biology Biológiai mintára készített, E Electronics elektronikusan működtetett,
Intelligens Rendszerek Robotok http://mobil.nik.uni-obuda.hu http://mobil.nik.uni-obuda.hu/tantargyak/irg/segedanyagok/ B Biology Biológiai mintára készített, E Electronics elektronikusan működtetett,
MEGHÍVÓ. Infokommunikációs technológiák és a jövő társadalma (FuturICT.hu) TÁMOP-4.2.2.C-11/1/KONV-2012-0013
 TÁMOP-4.2.2.C-11/1/KONV-2012-0013") MEGHÍVÓ Projekt címe: Infokommunikációs technológiák és a jövő társadalma (FuturICT.hu) Projekt azonosítószáma: TÁMOP-4.2.2.C-11/1/KONV-2012-0013 Az esemény megnevezése: FuturICT.hu zárórendezvény és Szakmai
MEGHÍVÓ Projekt címe: Infokommunikációs technológiák és a jövő társadalma (FuturICT.hu) Projekt azonosítószáma: TÁMOP-4.2.2.C-11/1/KONV-2012-0013 Az esemény megnevezése: FuturICT.hu zárórendezvény és Szakmai
Robotjárművek alkalmazhatósága az integrált határbiztonsági rendszerben
 Robotjárművek alkalmazhatósága az integrált határbiztonsági rendszerben Lipics László r. őrnagy Kőszegi Rendőrkapitányság Határrendészeti Alosztályvezető 1 "We said why not get a jump start on the initiative
Robotjárművek alkalmazhatósága az integrált határbiztonsági rendszerben Lipics László r. őrnagy Kőszegi Rendőrkapitányság Határrendészeti Alosztályvezető 1 "We said why not get a jump start on the initiative
Markerek jól felismerhetőek, elkülöníthetők a környezettől Korlátos hiba
 1. Ismertesse a relatív és abszolút pozíciómegatározás tulajdonságait, és lehetőségeit. Mit jelent a dead reckoning, és mi az odometria? Milyen hibalehetőségekre kell számítanunk odometria alkalmazásakor?
1. Ismertesse a relatív és abszolút pozíciómegatározás tulajdonságait, és lehetőségeit. Mit jelent a dead reckoning, és mi az odometria? Milyen hibalehetőségekre kell számítanunk odometria alkalmazásakor?
IoT alapú mezőgazdasági adatgyűjtő prototípus fejlesztési tapasztalatok
 IoT alapú mezőgazdasági adatgyűjtő prototípus fejlesztési tapasztalatok 2016.05.19. Szilágyi Róbert Tóth Mihály Debreceni Egyetem Az IoT Eszközök és más fizikai objektumok elektronikával, vezérléssel,
IoT alapú mezőgazdasági adatgyűjtő prototípus fejlesztési tapasztalatok 2016.05.19. Szilágyi Róbert Tóth Mihály Debreceni Egyetem Az IoT Eszközök és más fizikai objektumok elektronikával, vezérléssel,
Mesterséges intelligencia az önvezető autók világában. Takács Árpád. arpad.takacs@adasworks.com
 Mesterséges intelligencia az önvezető autók világában Takács Árpád arpad.takacs@adasworks.com I. Commsignia BME HIT autonóm járműtechnológiák workshop, Budapest, 2016. május 11. Rólunk Automatizált vezetés
Mesterséges intelligencia az önvezető autók világában Takács Árpád arpad.takacs@adasworks.com I. Commsignia BME HIT autonóm járműtechnológiák workshop, Budapest, 2016. május 11. Rólunk Automatizált vezetés
PTE PMMIK, SzKK Smart City Technologies, BimSolutions.hu 1
 BEMUTATKOZÁS Diploma (2009) Építészirodai munka, tervezési gyakorlat VICO vcs, (vce), pl, trainer (2010) PhD tanulmányok + oktatás Kutatócsoport + saját projektek (2014) BimSolutions.hu 1 BIM FELHASZNÁLÁSI
BEMUTATKOZÁS Diploma (2009) Építészirodai munka, tervezési gyakorlat VICO vcs, (vce), pl, trainer (2010) PhD tanulmányok + oktatás Kutatócsoport + saját projektek (2014) BimSolutions.hu 1 BIM FELHASZNÁLÁSI
3D - geometriai modellezés, alakzatrekonstrukció, nyomtatás
 3D - geometriai modellezés, alakzatrekonstrukció, nyomtatás 15. Digitális Alakzatrekonstrukció Méréstechnológia, Ponthalmazok regisztrációja http://cg.iit.bme.hu/portal/node/312 https://www.vik.bme.hu/kepzes/targyak/viiiav54
3D - geometriai modellezés, alakzatrekonstrukció, nyomtatás 15. Digitális Alakzatrekonstrukció Méréstechnológia, Ponthalmazok regisztrációja http://cg.iit.bme.hu/portal/node/312 https://www.vik.bme.hu/kepzes/targyak/viiiav54
Elektromos Kerékpáros Közösségi Közlekedési Rendszer EKKKR. Magyarországon egy új elektromos közbringa rendszer. Public Bike System Hungary Kft.
 EKKKR Elektromos Kerékpáros Közösségi Közlekedési Rendszer Magyarországon egy új elektromos közbringa rendszer Public Bike System Hungary Kft. EKKKR bemutatása Alternatív megoldás a közösségi közlekedés
EKKKR Elektromos Kerékpáros Közösségi Közlekedési Rendszer Magyarországon egy új elektromos közbringa rendszer Public Bike System Hungary Kft. EKKKR bemutatása Alternatív megoldás a közösségi közlekedés
Gyakorlatok. VITMMA09 Okos város MSc mellékspecializáció
 Gyakorlatok VITMMA09 Okos város MSc mellékspecializáció ITS gyakorlatok Cél Gyakorlati tudással kiegészíteni az elméleti ismereteket Példák a való világból, korlátozott de valósághű környezetben Tervezés,
Gyakorlatok VITMMA09 Okos város MSc mellékspecializáció ITS gyakorlatok Cél Gyakorlati tudással kiegészíteni az elméleti ismereteket Példák a való világból, korlátozott de valósághű környezetben Tervezés,
Big Data technológiai megoldások fejlesztése közvetlen mezőgazdasági tevékenységekhez
 Big Data technológiai megoldások fejlesztése közvetlen mezőgazdasági tevékenységekhez Szármes Péter doktorandusz hallgató Széchenyi István Egyetem, MMTDI Dr. Élő Gábor egyetemi docens, Széchenyi István
Big Data technológiai megoldások fejlesztése közvetlen mezőgazdasági tevékenységekhez Szármes Péter doktorandusz hallgató Széchenyi István Egyetem, MMTDI Dr. Élő Gábor egyetemi docens, Széchenyi István
MIKROKONTROLLEREK ALKALMAZÁSA AUTOMATA REPÜLŐ SZERKEZETEKBEN 4 BEVEZETÉS
 Schuster György 1 Terpecz Gábor 2 Radnai Viktor 3 MIKROKONTROLLEREK ALKALMAZÁSA AUTOMATA REPÜLŐ SZERKEZETEKBEN 4 A járművekben a 80-as évek elejétől alkalmaznak mikrokontrollereket, ez az utóbbi másfél
Schuster György 1 Terpecz Gábor 2 Radnai Viktor 3 MIKROKONTROLLEREK ALKALMAZÁSA AUTOMATA REPÜLŐ SZERKEZETEKBEN 4 A járművekben a 80-as évek elejétől alkalmaznak mikrokontrollereket, ez az utóbbi másfél
Önállóan működő. gyommentesítő. mechanikailag. művelő robot
 Zöldségekhez Önállóan működő gyommentesítő-művelő mechanikailag gyommentesítő művelő robot Az első, bárki számára elérhető Teljesen önállóan működő, elektromos mezőgazdasági robot Ágyásokban, sorban ültetett
Zöldségekhez Önállóan működő gyommentesítő-művelő mechanikailag gyommentesítő művelő robot Az első, bárki számára elérhető Teljesen önállóan működő, elektromos mezőgazdasági robot Ágyásokban, sorban ültetett
GIS Open D GEOSOLUTIONS HUNGARY KFT Váradi Attila: Trimble SX10 Minden az EGYben PREMIER
 GIS Open 2017 3D GEOSOLUTIONS HUNGARY KFT Váradi Attila: Trimble SX10 Minden az EGYben PREMIER 3D Geosolutions Hungary Kft. 3D Geosolutions Hungary Kft. 3D Geosolutions Hungary Kft. Célkitűzésünk Trimble
GIS Open 2017 3D GEOSOLUTIONS HUNGARY KFT Váradi Attila: Trimble SX10 Minden az EGYben PREMIER 3D Geosolutions Hungary Kft. 3D Geosolutions Hungary Kft. 3D Geosolutions Hungary Kft. Célkitűzésünk Trimble
Robotika. Relatív helymeghatározás Odometria
 Robotika Relatív helymeghatározás Odometria Differenciális hajtás c m =πd n /nc e c m D n C e n = hány mm-t tesz meg a robot egy jeladó impulzusra = névleges kerék átmérő = jeladó fölbontása (impulzus/ford.)
Robotika Relatív helymeghatározás Odometria Differenciális hajtás c m =πd n /nc e c m D n C e n = hány mm-t tesz meg a robot egy jeladó impulzusra = névleges kerék átmérő = jeladó fölbontása (impulzus/ford.)
KLIENS-SZERVER ALAPÚ ERLANG PROGRAMOK TRANSZFORMÁCIÓJA ERLANG OTP SÉMÁRA
 ELŐADÁS: KLIENS-SZERVER ALAPÚ ERLANG PROGRAMOK TRANSZFORMÁCIÓJA ERLANG OTP SÉMÁRA Király Roland, serial@aries.ektf.hu EKF Információtechnológiai Tanszék - Matematikai és Informatikai Intézet, Eger Az Erlang
ELŐADÁS: KLIENS-SZERVER ALAPÚ ERLANG PROGRAMOK TRANSZFORMÁCIÓJA ERLANG OTP SÉMÁRA Király Roland, serial@aries.ektf.hu EKF Információtechnológiai Tanszék - Matematikai és Informatikai Intézet, Eger Az Erlang
Érzékelők az autonóm járművekben
 Érzékelők az autonóm járművekben Gáspár Péter Szirányi Tamás 1 Érzékelők Tartalom Motivációs háttér Környezetérzékelés célja Autóipari érzékelők Széria megoldások és ipari trendek 2 Motiváció: A járműipar
Érzékelők az autonóm járművekben Gáspár Péter Szirányi Tamás 1 Érzékelők Tartalom Motivációs háttér Környezetérzékelés célja Autóipari érzékelők Széria megoldások és ipari trendek 2 Motiváció: A járműipar
A PÁLYÁZAT LEFOLYÁSA, SZEMÉLYI, TARTALMI VÁLTOZÁSAI
 Z Á R Ó J E L E N T É S OTKA nyilvántartási szám: K69018 Témavezető: Gingl Zoltán A téma címe: Fluktuációk és zajok alap- és interdiszciplináris kutatása fizikai, neurocardiológiai és nanotechnologiai
Z Á R Ó J E L E N T É S OTKA nyilvántartási szám: K69018 Témavezető: Gingl Zoltán A téma címe: Fluktuációk és zajok alap- és interdiszciplináris kutatása fizikai, neurocardiológiai és nanotechnologiai
Molekuláris dinamika I. 10. előadás
 Molekuláris dinamika I. 10. előadás Miről is szól a MD? nagy részecskeszámú rendszerek ismerjük a törvényeket mikroszkópikus szinten minden részecske mozgását szimuláljuk? Hogyan tudjuk megérteni a folyadékok,
Molekuláris dinamika I. 10. előadás Miről is szól a MD? nagy részecskeszámú rendszerek ismerjük a törvényeket mikroszkópikus szinten minden részecske mozgását szimuláljuk? Hogyan tudjuk megérteni a folyadékok,
Autonóm jármű forgalomszimulátorba illesztése
 Autonóm jármű forgalomszimulátorba illesztése Szalai Mátyás 2018 Konzulens: Dr. Tettamanti Tamás A szimulációs feladat Miért hasznos? Biztonságos környezetben nyújt lehetőséget az autonóm járművek forgalmi
Autonóm jármű forgalomszimulátorba illesztése Szalai Mátyás 2018 Konzulens: Dr. Tettamanti Tamás A szimulációs feladat Miért hasznos? Biztonságos környezetben nyújt lehetőséget az autonóm járművek forgalmi
Virtuális Egér. Horváth Zsolt, Schnádenberger Gábor, Varjas Viktor. 2011. március 20.
 Számítógépes Látás Projekt Virtuális Egér Horváth Zsolt, Schnádenberger Gábor, Varjas Viktor 011. március 0. Feladat kiírás: Egy olyan rendszer megvalósítása, melyben kamera értelmezi a kéz és az ujjak
Számítógépes Látás Projekt Virtuális Egér Horváth Zsolt, Schnádenberger Gábor, Varjas Viktor 011. március 0. Feladat kiírás: Egy olyan rendszer megvalósítása, melyben kamera értelmezi a kéz és az ujjak
Forgalmi modellezés BMEKOKUM209
 BME Közlekedésüzemi és Közlekedésgazdasági Tanszék Forgalmi modellezés BMEKOKUM209 Szimulációs modellezés Dr. Juhász János A forgalmi modellezés célja A közlekedési igények bővülése és a motorizáció növekedése
BME Közlekedésüzemi és Közlekedésgazdasági Tanszék Forgalmi modellezés BMEKOKUM209 Szimulációs modellezés Dr. Juhász János A forgalmi modellezés célja A közlekedési igények bővülése és a motorizáció növekedése
Szenzorok megismerése Érzékelők használata
 Szenzorok megismerése Érzékelők használata Sicz-Mesziár János sicz.mj@gmail.com 2011. április 14. OE-NIK Mi a szenzor? Olyan elem, amely a környezet jellemzőit méri és arról információval szolgál, valamilyen
Szenzorok megismerése Érzékelők használata Sicz-Mesziár János sicz.mj@gmail.com 2011. április 14. OE-NIK Mi a szenzor? Olyan elem, amely a környezet jellemzőit méri és arról információval szolgál, valamilyen
Új módszerek és eszközök infokommunikációs hálózatok forgalmának vizsgálatához
 I. előadás, 2014. április 30. Új módszerek és eszközök infokommunikációs hálózatok forgalmának vizsgálatához Dr. Orosz Péter ATMA kutatócsoport A kutatócsoport ATMA (Advanced Traffic Monitoring and Analysis)
I. előadás, 2014. április 30. Új módszerek és eszközök infokommunikációs hálózatok forgalmának vizsgálatához Dr. Orosz Péter ATMA kutatócsoport A kutatócsoport ATMA (Advanced Traffic Monitoring and Analysis)
Vezetéknélküli Érzékelő Hálózatok
 Dr. Kasza Tamás Vezetéknélküli Érzékelő Hálózatok Budapest, 2011. február 16. www.meetthescientist.hu 1 28 Tanulmányok - M.Sc.: - 1994-1999: BME-VIK - 1995-2000: BME-GTK - 1999-2003: BKE - 1997-1998: ELTE-TTK
Dr. Kasza Tamás Vezetéknélküli Érzékelő Hálózatok Budapest, 2011. február 16. www.meetthescientist.hu 1 28 Tanulmányok - M.Sc.: - 1994-1999: BME-VIK - 1995-2000: BME-GTK - 1999-2003: BKE - 1997-1998: ELTE-TTK
Műholdas és modell által szimulált globális ózon idősorok korrelációs tulajdonságai
 Műholdas és modell által szimulált globális ózon idősorok korrelációs tulajdonságai Homonnai Viktória II. éves PhD hallgató Témavezető: Dr. Jánosi Imre ELTE TTK, Komplex Rendszerek Fizikája Tanszék Bevezetés
Műholdas és modell által szimulált globális ózon idősorok korrelációs tulajdonságai Homonnai Viktória II. éves PhD hallgató Témavezető: Dr. Jánosi Imre ELTE TTK, Komplex Rendszerek Fizikája Tanszék Bevezetés
SZTE Nyílt Forrású Szoftverfejlesztő és Minősítő Kompetencia Központ
 UNIVERSITY OF SZEGED SZTE Nyílt Forrású Szoftverfejlesztő és Minősítő Kompetencia Központ Gyimóthy Tibor és Ferenc Rudolf Szegedi Tudományegyetem Szoftverfejlesztés Tanszék Szoftverfejlesztés Tanszék Több
UNIVERSITY OF SZEGED SZTE Nyílt Forrású Szoftverfejlesztő és Minősítő Kompetencia Központ Gyimóthy Tibor és Ferenc Rudolf Szegedi Tudományegyetem Szoftverfejlesztés Tanszék Szoftverfejlesztés Tanszék Több
BIG DATA ELEMZÉSEK LEHETŐSÉGEI
 BIG DATA ELEMZÉSEK LEHETŐSÉGEI A KÖRNYEZETVÉDELMI MODELLEZÉSBEN Dr. Torma A. 2015.11.13. 2015/11/13 Dr. TORMA A. >> Széchenyi István Egyetem 2 Tartalom 1. A Big Data fogalma 2. Pár érdekes adat a Big Data
BIG DATA ELEMZÉSEK LEHETŐSÉGEI A KÖRNYEZETVÉDELMI MODELLEZÉSBEN Dr. Torma A. 2015.11.13. 2015/11/13 Dr. TORMA A. >> Széchenyi István Egyetem 2 Tartalom 1. A Big Data fogalma 2. Pár érdekes adat a Big Data
Vezető nélküli targoncák Gyermelyi Zrt-nél Jungheinrich AGV
 Vezető nélküli targoncák Gyermelyi Zrt-nél Jungheinrich AGV Gritsch Ákos, Jungheinrich Hungária Kft. 2017. június 1. Agenda 1 2 3 4 5 Feladat alakulása Gyermelyi Zrt-nél Vezető nélküli targoncák (AGV)
Vezető nélküli targoncák Gyermelyi Zrt-nél Jungheinrich AGV Gritsch Ákos, Jungheinrich Hungária Kft. 2017. június 1. Agenda 1 2 3 4 5 Feladat alakulása Gyermelyi Zrt-nél Vezető nélküli targoncák (AGV)
3D számítógépes geometria és alakzatrekonstrukció
 3D számítógépes geometria és alakzatrekonstrukció 15. Digitális Alakzatrekonstrukció Méréstechnológia, Ponthalmazok regisztrációja http://cg.iit.bme.hu/portal/node/312 https://www.vik.bme.hu/kepzes/targyak/viiima01
3D számítógépes geometria és alakzatrekonstrukció 15. Digitális Alakzatrekonstrukció Méréstechnológia, Ponthalmazok regisztrációja http://cg.iit.bme.hu/portal/node/312 https://www.vik.bme.hu/kepzes/targyak/viiima01
Előrenéző és paraméter tanuló algoritmusok on-line klaszterezési problémákra
 Szegedi Tudományegyetem Számítógépes Algoritmusok és Mesterséges Intelligencia Tanszék Dr. Németh Tamás Előrenéző és paraméter tanuló algoritmusok on-line klaszterezési problémákra SZTE TTIK, Móra Kollégium,
Szegedi Tudományegyetem Számítógépes Algoritmusok és Mesterséges Intelligencia Tanszék Dr. Németh Tamás Előrenéző és paraméter tanuló algoritmusok on-line klaszterezési problémákra SZTE TTIK, Móra Kollégium,
Publikációs lista. Gódor Győző. 2008. július 14. Cikk szerkesztett könyvben... 2. Külföldön megjelent idegen nyelvű folyóiratcikk...
 Publikációs lista Gódor Győző 2008. július 14. Cikk szerkesztett könyvben... 2 Külföldön megjelent idegen nyelvű folyóiratcikk... 2 Nemzetközi konferencia-kiadványban megjelent idegen nyelvű előadások...
Publikációs lista Gódor Győző 2008. július 14. Cikk szerkesztett könyvben... 2 Külföldön megjelent idegen nyelvű folyóiratcikk... 2 Nemzetközi konferencia-kiadványban megjelent idegen nyelvű előadások...
Geopanama, a vízidrón
 Geopanama, a vízidrón Stenzel Sándor Geodézia Zrt. Borsod-Abaúj-Zemplén Megyei Kormányhivatal Földhivatala Földmérési Szakmai Nap Miskolc, 2014. November 05. mégis, mik azok a drónok? Elnevezés: Drone
Geopanama, a vízidrón Stenzel Sándor Geodézia Zrt. Borsod-Abaúj-Zemplén Megyei Kormányhivatal Földhivatala Földmérési Szakmai Nap Miskolc, 2014. November 05. mégis, mik azok a drónok? Elnevezés: Drone
A MINI SZATELLITTŐL A SUMO-ROBOTIG
 A MINI SZATELLITTŐL A SUMO-ROBOTIG Az atomoktól a csillagokig 2018. nov. 29. Pető Mária Székely Mikó Kollégium, Sepsiszentgyörgy MTA-ELTE Fizika Tanítása Kutatócsoport Témáink: Arduino - röviden CanSat-
A MINI SZATELLITTŐL A SUMO-ROBOTIG Az atomoktól a csillagokig 2018. nov. 29. Pető Mária Székely Mikó Kollégium, Sepsiszentgyörgy MTA-ELTE Fizika Tanítása Kutatócsoport Témáink: Arduino - röviden CanSat-
Közúti közlekedési automatika. BME, Közlekedés- és Járműirányítási Tanszék
 Közúti közlekedési automatika BME, Közlekedés- és Járműirányítási Tanszék A közúti forgalomirányítás célja A közlekedési folyamatok befolyásolása meghatározott célok elérése érdekében. A forgalomirányító
Közúti közlekedési automatika BME, Közlekedés- és Járműirányítási Tanszék A közúti forgalomirányítás célja A közlekedési folyamatok befolyásolása meghatározott célok elérése érdekében. A forgalomirányító
Kis magasságban végzett légi térképészeti munkák tapasztalatai. LÉGIFOTÓ NAP Székesfehérvár GeoSite Kft Horváth Zsolt
 Kis magasságban végzett légi térképészeti munkák tapasztalatai LÉGIFOTÓ NAP 2018 - Székesfehérvár GeoSite Kft Horváth Zsolt Az UAV technológiák térképészeti célú alkalmazásának lehetőségei, célterületei:
Kis magasságban végzett légi térképészeti munkák tapasztalatai LÉGIFOTÓ NAP 2018 - Székesfehérvár GeoSite Kft Horváth Zsolt Az UAV technológiák térképészeti célú alkalmazásának lehetőségei, célterületei:
Szárazföldi autonóm mobil robotok vezérlőrendszerének kialakítási lehetőségei. Kucsera Péter ZMNE Doktorandusz
 Szárazföldi autonóm mobil robotok vezérlőrendszerének kialakítási lehetőségei. Kucsera Péter ZMNE Doktorandusz A mobil robot vezérlőrendszerének feladatai Elvégzendő feladat Kommunikáció Vezérlő rendszer
Szárazföldi autonóm mobil robotok vezérlőrendszerének kialakítási lehetőségei. Kucsera Péter ZMNE Doktorandusz A mobil robot vezérlőrendszerének feladatai Elvégzendő feladat Kommunikáció Vezérlő rendszer
CARE. Biztonságos. otthonok idős embereknek CARE. Biztonságos otthonok idős embereknek 2010-09-02. Dr. Vajda Ferenc Egyetemi docens
 CARE Biztonságos CARE Biztonságos otthonok idős embereknek otthonok idős embereknek 2010-09-02 Dr. Vajda Ferenc Egyetemi docens 3D Érzékelés és Mobilrobotika kutatócsoport Budapesti Műszaki és Gazdaságtudományi
CARE Biztonságos CARE Biztonságos otthonok idős embereknek otthonok idős embereknek 2010-09-02 Dr. Vajda Ferenc Egyetemi docens 3D Érzékelés és Mobilrobotika kutatócsoport Budapesti Műszaki és Gazdaságtudományi
zturbinák kompresszorának akusztikus
 Mikro-gázturbin zturbinák kompresszorának akusztikus pompázs detektálása Koncz Miklós s Tamás, PhD ROBOTWARFARE 9 1 Gazdaságos egyensúlyozó gép tervezése pilóta nélküli repülőgépek gázturbinájához Koncz
Mikro-gázturbin zturbinák kompresszorának akusztikus pompázs detektálása Koncz Miklós s Tamás, PhD ROBOTWARFARE 9 1 Gazdaságos egyensúlyozó gép tervezése pilóta nélküli repülőgépek gázturbinájához Koncz
Virtuális Valóság. Működése és használata
 Virtuális Valóság Működése és használata Virtuális Valóság 2 Virtuális Valóság 3 Virtuális Valóság 4 Tracking Szobaméretű szabadság Tracking 5x5 méter Six Degrees of Freedom 6 Tracking 7 Constellation
Virtuális Valóság Működése és használata Virtuális Valóság 2 Virtuális Valóság 3 Virtuális Valóság 4 Tracking Szobaméretű szabadság Tracking 5x5 méter Six Degrees of Freedom 6 Tracking 7 Constellation
Miskolci Egyetem Doktori Tanácsa Miskolc
 Miskolci Egyetem Doktori Tanácsa Miskolc Program: Geotechnikai rendszerek és eljárástechnika Alprogram: Geotechnikai rendszerek és eljárások kutatása, fejlesztése Részprogram: Térinformatikai rendszerek
Miskolci Egyetem Doktori Tanácsa Miskolc Program: Geotechnikai rendszerek és eljárástechnika Alprogram: Geotechnikai rendszerek és eljárások kutatása, fejlesztése Részprogram: Térinformatikai rendszerek
BT-R820 Használati utasítás BT-R820 Wireless GPS Egység Használati utasítás Dátum: Szeptember, 2006 Verzió: 1.1
 BT-R820 Wireless GPS Egység Használati utasítás Dátum: Szeptember, 2006 Verzió: 1.1 1. oldal TARTALOMJEGYZÉK 0. Gyors telepítés...3 1. Bevezetés...4 1.1 Áttekintés...4 1.2 Fő jellemzők...4 1.3 Alkalmazási
BT-R820 Wireless GPS Egység Használati utasítás Dátum: Szeptember, 2006 Verzió: 1.1 1. oldal TARTALOMJEGYZÉK 0. Gyors telepítés...3 1. Bevezetés...4 1.1 Áttekintés...4 1.2 Fő jellemzők...4 1.3 Alkalmazási
Kvantumszámítógép a munkára fogott kvantummechanika
 Kvantumszámítógép a munkára fogott kvantummechanika Széchenyi Gábor ELTE, Anyagfizikai Tanszék Atomoktól a csillagokig, 2019. április 25. Kvantumszámítógép a hírekben Egy új technológia 1940-es 1980-as
Kvantumszámítógép a munkára fogott kvantummechanika Széchenyi Gábor ELTE, Anyagfizikai Tanszék Atomoktól a csillagokig, 2019. április 25. Kvantumszámítógép a hírekben Egy új technológia 1940-es 1980-as
Autonóm járművek megjelenésének társadalmi hatásai, várható következményei
 Autonóm járművek megjelenésének társadalmi hatásai, várható következményei Közlekedési balesetek és a közlekedő ember Szeminárium, workshop és tudományos ülés 2017. október 14. Apatóczky Tamás KTE Forgalombiztonsági
Autonóm járművek megjelenésének társadalmi hatásai, várható következményei Közlekedési balesetek és a közlekedő ember Szeminárium, workshop és tudományos ülés 2017. október 14. Apatóczky Tamás KTE Forgalombiztonsági
Evans-Searles fluktuációs tétel Crooks fluktuációs tétel Jarzynski egyenlőség
 Evans-Searles fluktuációs tétel Crooks fluktuációs tétel Jarzynski egyenlőség Osváth Szabolcs Evans-Searles fluktuációs tétel Denis J Evans, Ezechiel DG Cohen, Gary P Morriss (1993) Denis J Evans, Debra
Evans-Searles fluktuációs tétel Crooks fluktuációs tétel Jarzynski egyenlőség Osváth Szabolcs Evans-Searles fluktuációs tétel Denis J Evans, Ezechiel DG Cohen, Gary P Morriss (1993) Denis J Evans, Debra
Távközlô hálózati folyamatok monitorozása
 TATAI PÉTER AITIA International Zrt. VARGA PÁL, MAROSI GYULA BME Távközlési és Médiainformatikai Tanszék, TSPLab {varga, marosi}@tmit.bme.hu Kulcsszavak: passzív hálózat, GSM, GPRS, távmonitorozás, forgalmi
TATAI PÉTER AITIA International Zrt. VARGA PÁL, MAROSI GYULA BME Távközlési és Médiainformatikai Tanszék, TSPLab {varga, marosi}@tmit.bme.hu Kulcsszavak: passzív hálózat, GSM, GPRS, távmonitorozás, forgalmi
Csoportos üzenetszórás optimalizálása klaszter rendszerekben
 Csoportos üzenetszórás optimalizálása klaszter rendszerekben Készítette: Juhász Sándor Csikvári András Budapesti Műszaki és Gazdaságtudományi Egyetem Villamosmérnöki és Informatikai Kar Automatizálási
Csoportos üzenetszórás optimalizálása klaszter rendszerekben Készítette: Juhász Sándor Csikvári András Budapesti Műszaki és Gazdaságtudományi Egyetem Villamosmérnöki és Informatikai Kar Automatizálási
A KUTATÁS EREDMÉNYEI ZÁRÓJELENTÉS 2004-2006.
 ÖNELLENŐRZÉS ÉS FUTÁSIDEJŰ VERIFIKÁCIÓ SZÁMÍTÓGÉPES PROGRAMOKBAN OTKA T-046527 A KUTATÁS EREDMÉNYEI ZÁRÓJELENTÉS 2004-2006. Témavezető: dr. Majzik István Budapesti Műszaki és Gazdaságtudományi Egyetem
ÖNELLENŐRZÉS ÉS FUTÁSIDEJŰ VERIFIKÁCIÓ SZÁMÍTÓGÉPES PROGRAMOKBAN OTKA T-046527 A KUTATÁS EREDMÉNYEI ZÁRÓJELENTÉS 2004-2006. Témavezető: dr. Majzik István Budapesti Műszaki és Gazdaságtudományi Egyetem
HELYSZÍN: RAMADA RESORT AQUAWORLD BUDAPEST IDÔPONT: 2011. OKTÓBER 27. REGISZTRÁCIÓ: HUNGARY.NI.COM/NIDAYS
 ÜZLET > [PRESSZÓ] A BOSCH TÖRTÉNETÉNEK SAROKPONTJAI 1886, Stuttgart a cég megalakul, finommechanikai és elektrotechnikai profillal I 1902 szinte az elsô gyártmányuk a nagyfeszültségû, mágneses gyújtási
ÜZLET > [PRESSZÓ] A BOSCH TÖRTÉNETÉNEK SAROKPONTJAI 1886, Stuttgart a cég megalakul, finommechanikai és elektrotechnikai profillal I 1902 szinte az elsô gyártmányuk a nagyfeszültségû, mágneses gyújtási
Részecske azonosítás kísérleti módszerei
 Részecske azonosítás kísérleti módszerei Galgóczi Gábor Előadás vázlata A részecske azonosítás létjogosultsága Részecske azonosítás: Módszerek Detektorok ALICE-ból példa A részecskeazonosítás létjogosultsága
Részecske azonosítás kísérleti módszerei Galgóczi Gábor Előadás vázlata A részecske azonosítás létjogosultsága Részecske azonosítás: Módszerek Detektorok ALICE-ból példa A részecskeazonosítás létjogosultsága
Neurális hálózatok bemutató
 Neurális hálózatok bemutató Füvesi Viktor Miskolci Egyetem Alkalmazott Földtudományi Kutatóintézet Miért? Vannak feladatok amelyeket az agy gyorsabban hajt végre mint a konvencionális számítógépek. Pl.:
Neurális hálózatok bemutató Füvesi Viktor Miskolci Egyetem Alkalmazott Földtudományi Kutatóintézet Miért? Vannak feladatok amelyeket az agy gyorsabban hajt végre mint a konvencionális számítógépek. Pl.:
Nagyfeszültségű távvezetékek termikus terhelhetőségének dinamikus meghatározása az okos hálózat eszközeivel
 Nagyfeszültségű távvezetékek termikus terhelhetőségének dinamikus meghatározása az okos hálózat eszközeivel Okos hálózat, okos mérés konferencia 2012. március 21. Tárczy Péter Energin Kft. Miért aktuális?
Nagyfeszültségű távvezetékek termikus terhelhetőségének dinamikus meghatározása az okos hálózat eszközeivel Okos hálózat, okos mérés konferencia 2012. március 21. Tárczy Péter Energin Kft. Miért aktuális?
ProSeniis projekt. Monos János GE Healthcare
 ProSeniis projekt Monos János GE Healthcare ProSeniis projekt 3 éves, magyar állam által támogatott program GE Healthcare által vezetett, 6 tagú konzorcium neves magyar egyetemekkel és egészségügyi vállalkozásokkal
ProSeniis projekt Monos János GE Healthcare ProSeniis projekt 3 éves, magyar állam által támogatott program GE Healthcare által vezetett, 6 tagú konzorcium neves magyar egyetemekkel és egészségügyi vállalkozásokkal
Ambiens szabályozás problémája Kontroll és tanulás-1
 Ambiens szabályozás problémája Kontroll és tanulás-1 Ambiens (fizikai) tér Ambiens Intelligencia szenzorok beavatkozók Ágens szervezet AmI - megfigyelés, elemzés - tervezés, megtanulás AmI - statikus -
Ambiens szabályozás problémája Kontroll és tanulás-1 Ambiens (fizikai) tér Ambiens Intelligencia szenzorok beavatkozók Ágens szervezet AmI - megfigyelés, elemzés - tervezés, megtanulás AmI - statikus -
Autonóm - és hagyományos közúti járművek alkotta közlekedési rendszerek összehasonlító elemzése
 Budapesti Műszaki és Gazdaságtudományi Egyetem Közlekedésmérnöki és Járműmérnöki Kar Közlekedés- és Járműirányítási Tanszék Záróvizsga 2017.06.20. Autonóm - és hagyományos közúti járművek alkotta közlekedési
Budapesti Műszaki és Gazdaságtudományi Egyetem Közlekedésmérnöki és Járműmérnöki Kar Közlekedés- és Járműirányítási Tanszék Záróvizsga 2017.06.20. Autonóm - és hagyományos közúti járművek alkotta közlekedési
VALÓS HULLÁMFRONT ELŐÁLLÍTÁSA A SZÁMÍTÓGÉPES ÉS A DIGITÁLIS HOLOGRÁFIÁBAN PhD tézisfüzet
 VALÓS HULLÁMFRONT ELŐÁLLÍTÁSA A SZÁMÍTÓGÉPES ÉS A DIGITÁLIS HOLOGRÁFIÁBAN PhD tézisfüzet PAPP ZSOLT Budapesti Műszaki és Gazdaságtudományi Egyetem Fizika Tanszék 2003 1 Bevezetés A lézerek megjelenését
VALÓS HULLÁMFRONT ELŐÁLLÍTÁSA A SZÁMÍTÓGÉPES ÉS A DIGITÁLIS HOLOGRÁFIÁBAN PhD tézisfüzet PAPP ZSOLT Budapesti Műszaki és Gazdaságtudományi Egyetem Fizika Tanszék 2003 1 Bevezetés A lézerek megjelenését
KÖFOP VEKOP A jó kormányzást megalapozó közszolgálat-fejlesztés
 KÖFOP-2.1.2-VEKOP-15-2016-00001 A jó kormányzást megalapozó közszolgálat-fejlesztés Az Okos város okos közigazgatás kutatóműhely zárórendezvénye Okos szolgáltatások teljesítményének mérése, elemzése és
KÖFOP-2.1.2-VEKOP-15-2016-00001 A jó kormányzást megalapozó közszolgálat-fejlesztés Az Okos város okos közigazgatás kutatóműhely zárórendezvénye Okos szolgáltatások teljesítményének mérése, elemzése és
Nagyméretű közúti közlekedési hálózatok analízise, 3D vizualizációja
 Nagyméretű közúti közlekedési hálózatok analízise, 3D vizualizációja Fazekas Sándor Témavezető: dr. Péter Tamás Közlekedés és járműirányítás workshop BME 2011 ISBN 978-963-420-975-1 Köszönet nyilvánítás
Nagyméretű közúti közlekedési hálózatok analízise, 3D vizualizációja Fazekas Sándor Témavezető: dr. Péter Tamás Közlekedés és járműirányítás workshop BME 2011 ISBN 978-963-420-975-1 Köszönet nyilvánítás