Csoportos viselkedés és automatizált etológia
|
|
|
- Jázmin Bognárné
- 6 évvel ezelőtt
- Látták:
Átírás



1 Csoportos viselkedés és automatizált etológia Vásárhelyi Gábor, PhD ELTE Biológiai Fizika Tanszék StatFiz Szeminárium, május 14.






2 hálózatok: irányíthatóság, hierarchia, adathalászat sejtek, szövetek: mintázat, szegregáció, perkoláció madarak, emlősök: szociális dinamika, vezetés szimulációk: csoportos döntés, optimális hierarchia hardver, szoftver: GPS, INS, videó robotok, drónok: vezéregyedek, autonómia 2





3 3 Milyen a csoportos mozgás?



4 4 U n i v e r z á l i s



5 5 Hatékony Önhajtott, nem egyensúlyi



6 Egyszerűen modellezhető, mégis bonyolult 6
7 Vicsek-modell Állandó sebességű, önhajtott részecskék Sebesség irányát befolyásolja: Szomszédos részecskék sebességének iránya Zaj Vicsek, T.; Czirok, A.; Ben-Jacob, E.; Cohen, I.; Shochet, O. (1995). "Novel type of phase transition in a system of self-driven particles". Physical Review Letters 7
8 8 Tartalomjegyzék Csoportos mozgás, csoportos döntéshozatal az állatvilágban Galambok kontextus-függő hierarchiája Optimális tudáseloszlás a csoportban Kutyák viselkedésének automata elemzése Csoportosan repülő robotok
9 Modern technológiák az etológia szolgálatában Kamerák (jó felbontás térben és időben, automatikus képfeldolgozás, sztereo/3d) Mozgásérzékelők (VICON, gyorsulásmérő, giroszkóp, magnetométer, nyomásérzékelő) Helymeghatározók (GPS, GSM, rádió lokátorok, RFID) Adatfeldolgozási kapacitás és sebesség 9

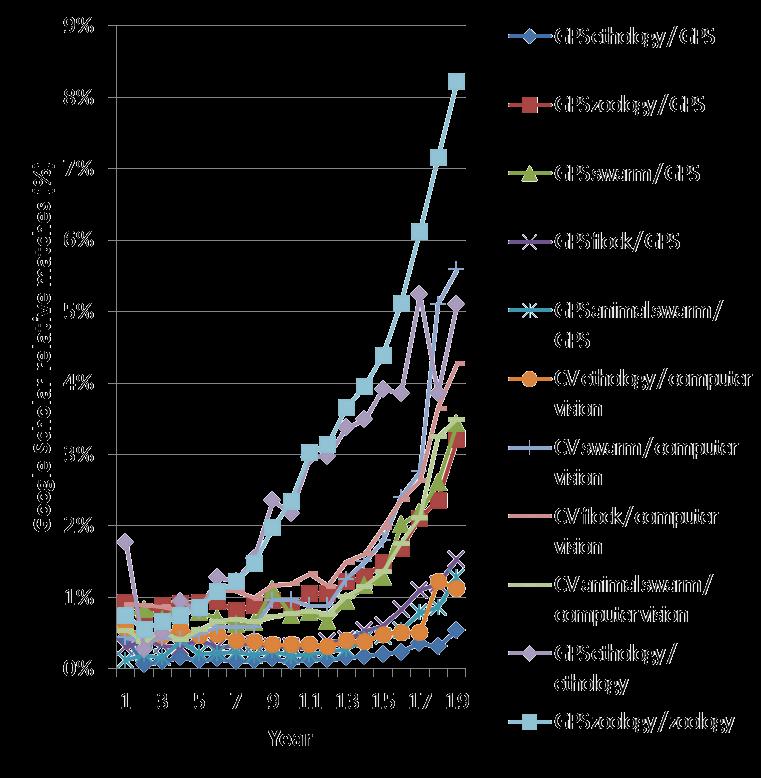


10 10 Google Scholar Trendek
 Ioannou, C.C., Guttal, V. & Couzin, I.D.")
11 Csoportban lenni biztonságosabb Valódi ragadozó Virtuális zsákmány szimulált viselkedéssel Kevesebb támadás a csoportosan mozgók irányába (irány átlagolás, többiekhez közel) Ioannou, C.C., Guttal, V. & Couzin, I.D., Predatory Fish Select for Coordinated Collective Motion in Virtual Prey, Science (2012) 11
12 Csoportban lenni hatékonyabb Portugal, Steven J., et al. "Upwash exploitation and downwash avoidance by flap phasing in ibis formation flight." Nature (2014):

13 Optimális információterjedés 3D trajektória rekonstrukció 3 kamerával (170Hz) Irányváltás info időben lineárisan terjed (~50ms), disszipáció mentesen Szuperfolyadék-kal analóg modell, optimális hatékonyság A. Attanasi et al., Superfluid transport of information in turning flocks of starlings, arxiv preprint (2013) 13

14 Nem kell sok vezér Kétszintű modell, szimuláció rejtett vezetőkkel Minél nagyobb a csoport, arányaiban annál kevesebb vezető kell 5-10% vezető már hatékonyan irányítja a teljes csapatot. I. D. Couzin, J. Krause, N. R. Franks, S. A. Levin, Effective leadership and decision making in animal groups on the move, Nature (2005) 14
 15 Robot szomszéd, menjünk együtt!")
15 J. Halloy, et al., Social Integration of Robots into Groups of Cockroaches to Control Self-Organized Choices, Science (2007) 15 Robot szomszéd, menjünk együtt! Alap sötétebb a jobb búvóhely keresési mód manipulálva Kollektív döntés lokális interakciók alapján, nemlineáris visszacsatoláson keresztül





16 Vezetéshez kontaktus is elég N. Tarcai, Cs. Virágh, D. Ábel, M. Nagy, P. L. Várkonyi, G. Vásárhelyi and T. Vicsek, Patterns, transitions and the role of leaders in the collective dynamics of a simple robotic flock, J of Stat. Mech (2011) 16
17 large-versus-medium dark-versus-light D. J.T. Sumpter, J. Krause, R. James, I. D. Couzin, A. J.W. Ward, Consensus Decision Making by Fish, Current Biology (2008) 17 Dönt aki tud, követ aki nem Melyik ál-halat kövessük? Határozatképes döntéshozatal (ha nem tudom mit döntsek, azt csinálom, amit a többség) Döntési hatékonyság nő a csoportmérettel Jó döntést hozó egyedek aránya és azon próbálkozások aránya ahol mindenki jó döntést hoz (vonzóbb műhalat követi)
 18 Az állatok a valószínűségszámítás zsenijei Bayes-i egyesített modell, valószínűségi döntés mások")
18 Arganda, S., Pérez-Escudero, A., & de Polavieja, G. G., A common rule for decision making in animal collectives across species, PNAS (2012) 18 Az állatok a valószínűségszámítás zsenijei Bayes-i egyesített modell, valószínűségi döntés mások döntései alapján Csak a döntések számának különbsége számít zebrafish argentine ant stickleback P x as as ( n ( n x y kn kn y x ) ) 1
19 19

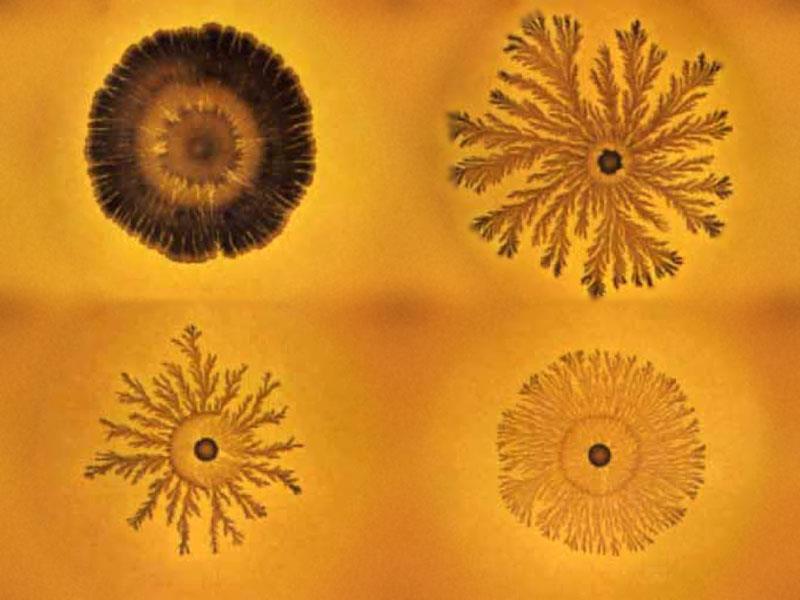
20 Együk meg egymást, közösen messzebb jutunk! Sűrűségtől függő viselkedés Kannibalizmus hajtotta vándorlás Mégis: sokan együtt messzebbre jutnak, mint egyedül Guttal, V., Romanczuk, P., Simpson, S. J., Sword, G. A., & Couzin, I. D., Cannibalism can drive the evolution of behavioural phase polyphenism in locusts, Ecology Letters (2012) 20
 Szervezett")


21 A karrierista hangyák Hangyák automata követése QR kóddal (>100 egyed, > 1 hónap, 6 kolónia, 9 millió interakció) Szervezett társadalom, munkamegosztás, ranglétra, életkorfüggő felelősség, karrier : ápoló királynő körül takarító fészekben gyűjtögető fészken kívül Mersch, M. P., Crespi, S. & Keller, L., Tracking individuals shows spatial fidelity is a key regulator of ant social organization, Science (2013) 21
22 Vezetés/hierarchia típusok Állandó (időben lassan változó) hierarchia két szint: vezető + követő Vezetők megkülönböztetettek korlátlan csapatméret táncoló méhek, hangyakirálynő, tanár-diák viszony Összetett hierarchia Kis méret: mindenki ismer mindenkit A legtöbb állatcsapat, majmok, elefántok, galambok, iskolai osztály Nagy méret: egyéni megkülönböztető jegyek (territórium, megjelenés): Szociális élőlények (hangyaboly, méhkas, vállalatok) Pillanatnyi vezetők Nagy csapatban is gyors, hatékony döntéshozatal egyfajta többségi szavazással, egyéni valószínűségszámítással halraj, birkanyáj, seregély raj, pánikban lévő tömeg 22
23 23 Tartalomjegyzék Csoportos mozgás, csoportos döntéshozatal a nagyvilágban Galambok kontextus-függő hierarchiája Optimális tudáseloszlás a csoportban Kutyák viselkedésének automata elemzése Csoportosan repülő robotok

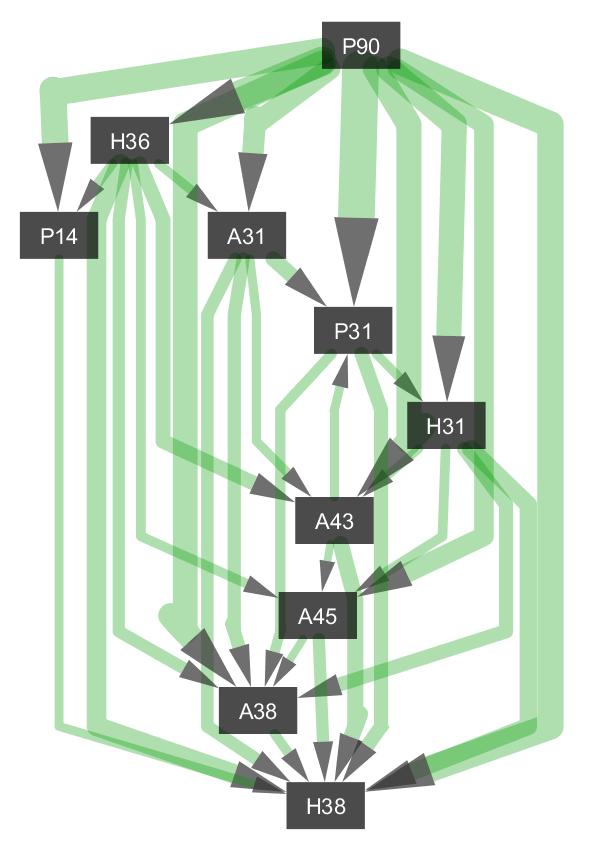
24 M. Nagy, G. Vásárhelyi, B. Pettit, I. Roberts-Mariani, T. Vicsek, D. Biro, Contextdependent hierarchies in pigeons, under review in PNAS, Kontextustól függő hierarchiák galambcsapatokban Benj Petit 1, Zsuzsa Ákos 2, Máté Nagy 12, Isabella Roberts-Mariani 1, Dániel Ábel 2, Gábor Vásárhelyi 2, Dóra Bíró 1, Tamás Vicsek 2 1 Department of Zoology, University of Oxford 2 Department of Biological Physics, ELTE


25 Mesterséges látás keretrendszer 3 folt, 5 szín 30 egyed 4 folt, 4 szín 54 egyed 25
 ( 50 cm ) (, ) ( ) ( min max v t v d t d t d t v AA i ij t ij i ij Q i F i i T Q i T F 1 1")
26 Automatikusan mért jellemzők Q F Q F NN Q F ij j i ij j i FQ 0.05 m/s ) ( 50 cm ) (, ) ( ) ( min max v t v d t d t d t v AA i ij t ij i ij Q i F i i T Q i T F 1 1 egyéni jellemzők: páros jellemzők: 26

27 Galambok etetése a dúcban 27
28 28 Hierarchikus tulajdonságok M C D, where C D ij ij min( M ij max( M, M ij ji M ) ji,0) M ij C ij X 2 X 3 X Eades-heurisztika X 3 X 1 X S i, j, i j i, j, i j C M ij ij T i, j, ji i, j, i j D D ij ij

29 29 10-es csoport 30-as csoport
 100Hz 3D gyorsulásmérő (±6g, 16 bit) 100Hz 3D")

30 GPS+INS logger rendszer 10Hz GPS (2-3m / 0.01 m/s felbontás) 100Hz 3D gyorsulásmérő (±6g, 16 bit) 100Hz 3D giroszkóp (±500º/s, 16 bit) 1Hz hőmérő 2.5 óra műkődési idő / 13 g tömeg 150mAh LiPo akkuval 25x45x12 mm teljes méret alkalmazásfüggő, programozható firmware 30

31 Szoftveres háttér Firmware feltöltés, adatletöltés, GPS-INS-videó szinkronizáció, interaktív vizualizáció, adatelemzés, adatmentés 31
,")

32 INS adat példa #1 nagyfrekvenciás részletek, GPS pozíció pontosítás (szenzor fúzió), viselkedés felismerés, mozgás analízis galamb repül a dúc körül ~8Hz szárnycsapásokkal (1s részlet) 32

33 vízimadár szakaszos szárnycsapása (20 s részlet) 33 INS adat példa #2 programozható firmware, eseményvezérelt ébredés időre vagy kis fogyasztású INS szenzorok jele alapján
![Navigációs kompetencia mérés Corr i ij v ( t') v (, t) j ( t' ) t' [ t3s; t3s] * ( t) ij max( Corr ij (,](/docs-images/81/82995770/images/34-0.jpg "t)) Nagy, M., Ákos, Z., Biro, D., & Vicsek, T.")
34 Navigációs kompetencia mérés Corr i ij v ( t') v (, t) j ( t' ) t' [ t3s; t3s] * ( t) ij max( Corr ij (, t)) Nagy, M., Ákos, Z., Biro, D., & Vicsek, T., Hierarchical group dynamics in pigeon flocks, 2010 Nature 34

35 35 Stabil hierarchia 30 fős galambcsapat csoportos repülésében

36 36 Kontextusfüggő stabil hierarchiák FQ dominancia Csipkedésszám Navigáció
37 37 Tartalomjegyzék Csoportos mozgás, csoportos döntéshozatal a nagyvilágban Galambok kontextus-függő hierarchiája Optimális tudáseloszlás a csoportban Kutyák viselkedésének automata elemzése Csoportosan repülő robotok
38 Optimális tudáseloszlás a csoportban avagy Hogyan osszunk fel véges tudást (költséget, erőforrást, pénzt) a csoportban, hogy a csoport a lehető legjobban teljesítsen? Tamás Vicsek, Anna Zafeiris ELTE Biológiai Fizika Tanszék 38
39 Keretrendszer Csoportos döntés tehát valószínűségi jóslás Különböző tudású egyedek tippelnek a saját tudásuk és a környezetük korábbi viselkedése alapján Genetikus algoritmus sokféleképpen változtatjuk a kezdeti tudáseloszlást, és a legjobban teljesítő csoportokat választjuk ki, evolváljuk tovább Optimális kollektív döntés iterációk hosszú során át alakul ki 39

40 40 Szavazó modell Fej vagy írás a helyes válasz? tippelj kérdezd meg a szomszédokat dönts többségi alapon új kör

41 Számsorozat tippelése kisvilág-hálózaton 41

42 Galambok csoportos repülési modellje 42

43 Eredmények különböző típusú hálózatokon 43
44 44 Tartalomjegyzék Csoportos mozgás, csoportos döntéshozatal a nagyvilágban Galambok kontextus-függő hierarchiája Optimális tudáseloszlás a csoportban Kutyák viselkedésének automata elemzése Csoportosan repülő robotok



 Using Inertial")
45 Automata viselkedés felismerés tehetetlenségi szenzorokkal Linda Gerencsér 1, Gábor Vásárhelyi 2, Máté Nagy 2, Tamás Vicsek 2, Ádám Miklósi 1 ELTE Etológia Tanszék + SWARMIX 1 ELTE Biológiai Fizika Tanszék + COLLMOT 2 L. Gerencser, G. Vásárhelyi, M. Nagy, A. Miklósi, T. Vicsek, Identification of Behaviour in Freely Moving Dogs (Canis familiaris) Using Inertial Sensors, submitted to PLOS One,

")

 Videó")
46 46 Adatgyűjtés Alanyok Labrador retriever (N=12) Malinois (N=12) Loggerek Giroszkóp Gyorsulásmérő (GPS) Videó kamera Laptop (PiGeoNS szoftver)


47 Nyersadat, koordinátarendszer 47
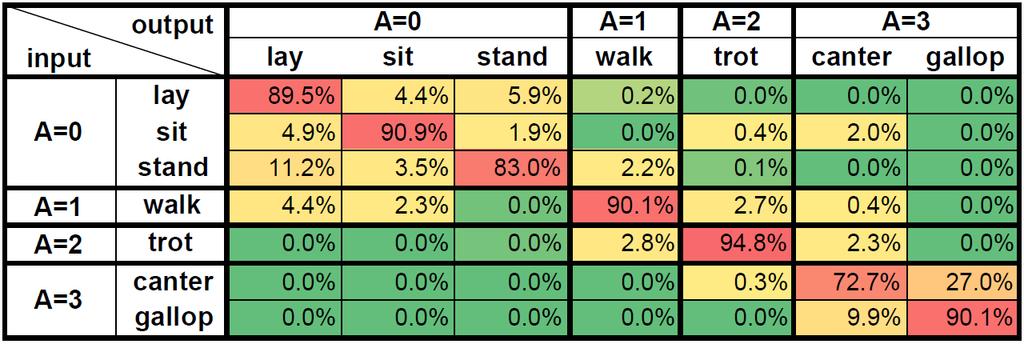
48 Adatgyűjtés a helyszínen (tehetetlenségi szenzorok + kamera) Video + felirat: Viselkedési kategóriák (pl. áll, ül, fut, sétál) szinkr. Érzékelők: Adat jellemzők (pl. átlag, szórás, ferdeség, FFT) Tanító fázis (SVM tanuló algoritmus) Jósló fázis (SVM tanuló algoritmus) Tanító és ellenőrző adatbázis független Adatok elemzése (1 kutyán, fajtánként, fajták között) 48
49 Viselkedési kategóriák Nem átfedő viselkedések Átfedő viselkedési kategóriák áll (A=0) áll, ugat áll, liheg ül (A=0) ül, ugat ül, liheg fekszik (A=0) fekszik, liheg sétál (A=1) sétál, szimatol sétál, jobbra fordul sétál, balra fordul üget (A=2) üget, szimatol üget, jobbra fordul üget, balra fordul szalad (A=3) szalad, szimatol szalad, jobbra fordul szalad, balra fordul vágtat (A=3) vágtat, jobbra fordul vágtat, balra fordul 49
50 Adatjellemzők (126 db) Base parameter source Base parameter components Comments Linear acceleration (a) a x, a y, a z, a x /a z, a Accelerometer measures acceleration of gravity as well, thus fixed attitude of the sensor on the dog s back is necessary for replicable measurements. a x /a z is the tangent of the cranio-caudal direction relative to ground. Angular velocity (ω) ω x, ω y, ω z, ω Fixed attitude is necessary for gyroscope as well, which measures angular velocity in body-fixed coordinate system. Angular acceleration(b) dω x /dt, dω y /dt, dω z /dt, d ω /dt Calculated as the numerical derivative of ω. Dot products a b, a ω, ω b Included without any special intention, but increases recognition rate slightly. Input node vector components Definition (for any base parameter component x) Comments 1st, 2nd and 3rd moments μ = E[x] = x/n σ = (E[(x μ) 2 ]) 1/2 γ = E[((x μ)/σ) 3 ] i.e., average (mean), standard deviation, skewness Extrema values Fast Fourier Transformation components min(x), max(x), ext_count(x) dc, low, mid and high part of FFT(x) Ext_count is the total number of local minima and maxima. Low, mid and high parts are calculated on the lower half of the spectrum. The upper half is mostly empty or includes pure noise. Note that these components are similar to the generally used partial dynamic body acceleration, but FFT provides a more general context for accessing high frequency components. 50
")
51 Eredmények (1-1 kutyára) 51

52 Eredmények (több kutyára) 52

53 Jóslás vs. kódolók 53

")
54 Felhasználási területek Hosszú távú, kis fogyasztású egyéni viselkedés mérések Kutya-robot-ember együttműködés Viselkedés alapú távirányítás Vadászat, mentőakció, csoportos keresés Hatékony monitorozás (kutya-cica, tehén-birka-ló, babák-öregek) Kiterjesztett valóság 54


55 Következő generáció Előzetes eredmények: közel 100%-os felismerés valós időben GPS, gyorsulásmérő, giroszkóp, mágneses szenzor, nyomásmérő, hőmérők, mikrofon, hangszóró Vezetéknélküli kapcsolat Onboard miniszámítógép, Linux, valós idejű adatelemzés 6x6 cm, 100 g 55

 Leadership and Path")

56 Vezetés, személyiség, dominancia összefüggése kutyáknál Zs. Ákos, R. Beck, M. Nagy, T. Vicsek and E. Kubinyi (2014) Leadership and Path Characteristics during Walks Are Linked to Dominance Order and Individual Traits in Dogs PLoS Comput Biol 10 e Public Library of Science 56





57 57 Összefoglalás csoportos mozgás: mindenki egyforma + zaj csoportos döntés: pillanatnyi egyéniség, mindenki számít (valószínűséget) csoportos viselkedés hierarchia: mindenki más, de csoportban az erő vezetők és követők: kevés dönt, sok követ

58 EU ERC COLLMOT ( ) A kutatást részben támogatta: Magyary Zoltán Posztdoktori Ösztöndíj, TÁMOP A/
Drónrajok fizikája, technológiája és alkalmazásai
 Drónrajok fizikája, technológiája és alkalmazásai Vásárhelyi Gábor, PhD ELTE Biológiai Fizika Tanszék Folyamatban lévő kutatási támogatások: MTA-ELTE Statisztikus és Biológiai Fizika Kutatócsoport Bolyai
Drónrajok fizikája, technológiája és alkalmazásai Vásárhelyi Gábor, PhD ELTE Biológiai Fizika Tanszék Folyamatban lévő kutatási támogatások: MTA-ELTE Statisztikus és Biológiai Fizika Kutatócsoport Bolyai
Mit tanulhatunk a madarak csoportos és s egyéni repüléséből?
 Mit tanulhatunk a madarak csoportos és s egyéni repüléséből? l? Nagy MátéM - ELTE Biológiai Fizika Tanszék http://angel.elte.hu/~nagymate 2009. 03. 12. Nagy Máté 1 Munkatársak: Ákos Zsuzsa, Szabó Péter,
Mit tanulhatunk a madarak csoportos és s egyéni repüléséből? l? Nagy MátéM - ELTE Biológiai Fizika Tanszék http://angel.elte.hu/~nagymate 2009. 03. 12. Nagy Máté 1 Munkatársak: Ákos Zsuzsa, Szabó Péter,
Etológia Emelt A viselkedés mérése. Miklósi Ádám egyetemi tanár ELTE TTK Etológia Tanszék 2018
 Etológia Emelt A viselkedés mérése Miklósi Ádám egyetemi tanár ELTE TTK Etológia Tanszék 2018 amiklosi62@gmail.com A viselkedés leírása: A viselkedés, mint fenotipikus jellemző Viselkedés: Élő szervezetek
Etológia Emelt A viselkedés mérése Miklósi Ádám egyetemi tanár ELTE TTK Etológia Tanszék 2018 amiklosi62@gmail.com A viselkedés leírása: A viselkedés, mint fenotipikus jellemző Viselkedés: Élő szervezetek
Sebességkorrelációk kollektíven mozgó élő rendszerekben
 Sebességkorrelációk kollektíven mozgó élő rendszerekben A doktori értekezés tézisei Ákos Zsuzsa Biológiai Fizika Tanszék, Eötvös Loránd Tudományegyetem Témavezető: Prof. Vicsek Tamás, MTA rendes tagja
Sebességkorrelációk kollektíven mozgó élő rendszerekben A doktori értekezés tézisei Ákos Zsuzsa Biológiai Fizika Tanszék, Eötvös Loránd Tudományegyetem Témavezető: Prof. Vicsek Tamás, MTA rendes tagja
Mozgásmodellezés. Lukovszki Csaba. Navigációs és helyalapú szolgáltatások és alkalmazások (VITMMA07)
") TÁVKÖZLÉSI ÉS MÉDIAINFORMATIKAI TANSZÉK () BUDAPESTI MŰSZAKI ÉS GAZDASÁGTUDOMÁNYI EGYETEM (BME) Mozgásmodellezés Lukovszki Csaba Áttekintés» Probléma felvázolása» Szabadsági fokok» Diszkretizált» Hibát
TÁVKÖZLÉSI ÉS MÉDIAINFORMATIKAI TANSZÉK () BUDAPESTI MŰSZAKI ÉS GAZDASÁGTUDOMÁNYI EGYETEM (BME) Mozgásmodellezés Lukovszki Csaba Áttekintés» Probléma felvázolása» Szabadsági fokok» Diszkretizált» Hibát
ROBOT IRÁNYÍTÁS INFRAVÖRÖS LED TÖMBBEL
 TÁMOP-4.2.2.C-11/1/KONV-212-4 infokommunikációs technológiák ROBOT IRÁNYÍTÁS INFRAVÖRÖS LED TÖMBBEL A KUTATÁSI TERÜLET RÖVID MEGFOGALMAZÁSA TÁMOP-4.2.2.C-11/1/KONV-212-4 Célok: Növekvő érdeklődés a non-boolean
TÁMOP-4.2.2.C-11/1/KONV-212-4 infokommunikációs technológiák ROBOT IRÁNYÍTÁS INFRAVÖRÖS LED TÖMBBEL A KUTATÁSI TERÜLET RÖVID MEGFOGALMAZÁSA TÁMOP-4.2.2.C-11/1/KONV-212-4 Célok: Növekvő érdeklődés a non-boolean
Élettartam teszteknél alkalmazott programstruktúra egy váltóvezérlő példáján keresztül
 Élettartam teszteknél alkalmazott programstruktúra egy váltóvezérlő példáján keresztül 1 Tartalom Miről is lesz szó? Bosch GS-TC Automata sebességváltó TCU (Transmission Control Unit) Élettartam tesztek
Élettartam teszteknél alkalmazott programstruktúra egy váltóvezérlő példáján keresztül 1 Tartalom Miről is lesz szó? Bosch GS-TC Automata sebességváltó TCU (Transmission Control Unit) Élettartam tesztek
SZENZORFÚZIÓS ELJÁRÁSOK KIDOLGOZÁSA AUTONÓM JÁRMŰVEK PÁLYAKÖVETÉSÉRE ÉS IRÁNYÍTÁSÁRA
 infokommunikációs technológiák SZENZORFÚZIÓS ELJÁRÁSOK KIDOLGOZÁSA AUTONÓM JÁRMŰVEK PÁLYAKÖVETÉSÉRE ÉS IRÁNYÍTÁSÁRA BEVEZETŐ A KUTATÁS CÉLJA Autonóm járművek és robotok esetén elsődleges feladat a robotok
infokommunikációs technológiák SZENZORFÚZIÓS ELJÁRÁSOK KIDOLGOZÁSA AUTONÓM JÁRMŰVEK PÁLYAKÖVETÉSÉRE ÉS IRÁNYÍTÁSÁRA BEVEZETŐ A KUTATÁS CÉLJA Autonóm járművek és robotok esetén elsődleges feladat a robotok
Virtuális Valóság. Működése és használata
 Virtuális Valóság Működése és használata Virtuális Valóság 2 Virtuális Valóság 3 Virtuális Valóság 4 Tracking Szobaméretű szabadság Tracking 5x5 méter Six Degrees of Freedom 6 Tracking 7 Constellation
Virtuális Valóság Működése és használata Virtuális Valóság 2 Virtuális Valóság 3 Virtuális Valóság 4 Tracking Szobaméretű szabadság Tracking 5x5 méter Six Degrees of Freedom 6 Tracking 7 Constellation
3D számítógépes geometria és alakzatrekonstrukció
 3D számítógépes geometria és alakzatrekonstrukció 15. Digitális Alakzatrekonstrukció Méréstechnológia, Ponthalmazok regisztrációja http://cg.iit.bme.hu/portal/node/312 https://www.vik.bme.hu/kepzes/targyak/viiima01
3D számítógépes geometria és alakzatrekonstrukció 15. Digitális Alakzatrekonstrukció Méréstechnológia, Ponthalmazok regisztrációja http://cg.iit.bme.hu/portal/node/312 https://www.vik.bme.hu/kepzes/targyak/viiima01
Kognitív Infokommunikáció: egy ébredő interdiszciplína. Baranyi Péter DSc
 Kognitív Infokommunikáció: egy ébredő interdiszciplína Baranyi Péter DSc Távközlési és Médiainformatika Tanszék, Budapesti Műszaki és Gazdaságtudományi Egyetem *** 3D Internet alapú Kontrol és Kommunikáció
Kognitív Infokommunikáció: egy ébredő interdiszciplína Baranyi Péter DSc Távközlési és Médiainformatika Tanszék, Budapesti Műszaki és Gazdaságtudományi Egyetem *** 3D Internet alapú Kontrol és Kommunikáció
3D - geometriai modellezés, alakzatrekonstrukció, nyomtatás
 3D - geometriai modellezés, alakzatrekonstrukció, nyomtatás 15. Digitális Alakzatrekonstrukció Méréstechnológia, Ponthalmazok regisztrációja http://cg.iit.bme.hu/portal/node/312 https://www.vik.bme.hu/kepzes/targyak/viiiav54
3D - geometriai modellezés, alakzatrekonstrukció, nyomtatás 15. Digitális Alakzatrekonstrukció Méréstechnológia, Ponthalmazok regisztrációja http://cg.iit.bme.hu/portal/node/312 https://www.vik.bme.hu/kepzes/targyak/viiiav54
CARE. Biztonságos. otthonok idős embereknek CARE. Biztonságos otthonok idős embereknek 2010-09-02. Dr. Vajda Ferenc Egyetemi docens
 CARE Biztonságos CARE Biztonságos otthonok idős embereknek otthonok idős embereknek 2010-09-02 Dr. Vajda Ferenc Egyetemi docens 3D Érzékelés és Mobilrobotika kutatócsoport Budapesti Műszaki és Gazdaságtudományi
CARE Biztonságos CARE Biztonságos otthonok idős embereknek otthonok idős embereknek 2010-09-02 Dr. Vajda Ferenc Egyetemi docens 3D Érzékelés és Mobilrobotika kutatócsoport Budapesti Műszaki és Gazdaságtudományi
Rendszermodellezés: házi feladat bemutatás
 Rendszermodellezés: házi feladat bemutatás Budapest University of Technology and Economics Fault Tolerant Systems Research Group Budapest University of Technology and Economics Department of Measurement
Rendszermodellezés: házi feladat bemutatás Budapest University of Technology and Economics Fault Tolerant Systems Research Group Budapest University of Technology and Economics Department of Measurement
Első sajátfrekvencia meghatározása vasúti fékpaneleknél XIV. ANSYS Konferencia Budaörs, 2015.04.23
 Első sajátfrekvencia meghatározása vasúti fékpaneleknél XIV. ANSYS Konferencia Budaörs, 2015.04.23 Knorr-Bremse Group Tartalom 1. Vasúti fékpanel 2. Rezonancia mérés 2.1 Impulzuskalapács mérés 3. Végeselemes
Első sajátfrekvencia meghatározása vasúti fékpaneleknél XIV. ANSYS Konferencia Budaörs, 2015.04.23 Knorr-Bremse Group Tartalom 1. Vasúti fékpanel 2. Rezonancia mérés 2.1 Impulzuskalapács mérés 3. Végeselemes
ECU teljesítm. Huszár r Viktor V. évf. villamosmérn. rnök k hallgató. Konzulensek: MIT Miklós ThyssenKrupp Presta.
 ECU teljesítm tmény- környezetének nek vizsgálata Huszár r Viktor V. évf. villamosmérn rnök k hallgató Konzulensek: dr. Márkus M János J BME-MIT MIT Siklódi Miklós ThyssenKrupp Presta BME MIT 26 ősz Bevezetés
ECU teljesítm tmény- környezetének nek vizsgálata Huszár r Viktor V. évf. villamosmérn rnök k hallgató Konzulensek: dr. Márkus M János J BME-MIT MIT Siklódi Miklós ThyssenKrupp Presta BME MIT 26 ősz Bevezetés
Robotot vezérlő szoftverek fejlesztése Developing robot controller softwares
 Robotot vezérlő szoftverek fejlesztése Developing robot controller softwares VARGA Máté 1, PÓGÁR István 2, VÉGH János 1 Programtervező informatikus BSc szakos hallgató 2 Programtervező informatikus MSc
Robotot vezérlő szoftverek fejlesztése Developing robot controller softwares VARGA Máté 1, PÓGÁR István 2, VÉGH János 1 Programtervező informatikus BSc szakos hallgató 2 Programtervező informatikus MSc
Mobil technológiák és alkalmazások
 ELTE-Soft kft Mobil technológiák és alkalmazások A kutatás-fejlesztési központok fejlesztése és megerősítése KMOP-1.1.2-08/1-2008-0002 pályázat Lőrincz András ELTE Informatikai Kar Mobil technológiák Mozog
ELTE-Soft kft Mobil technológiák és alkalmazások A kutatás-fejlesztési központok fejlesztése és megerősítése KMOP-1.1.2-08/1-2008-0002 pályázat Lőrincz András ELTE Informatikai Kar Mobil technológiák Mozog
Beltéri autonóm négyrotoros helikopter szabályozó rendszerének kifejlesztése és hardware-in-the-loop tesztelése
 Beltéri autonóm négyrotoros helikopter szabályozó rendszerének kifejlesztése és hardware-in-the-loop tesztelése Regula Gergely, Lantos Béla BME Villamosmérnöki és Informatikai Kar Irányítástechnika és
Beltéri autonóm négyrotoros helikopter szabályozó rendszerének kifejlesztése és hardware-in-the-loop tesztelése Regula Gergely, Lantos Béla BME Villamosmérnöki és Informatikai Kar Irányítástechnika és
Az állatok szociális szerveződése, csoport vagy magány?
 Az állatok szociális szerveződése, csoport vagy magány? Csoport sok egyed együtt, fontosak az egyedek közötti kapcsolatok a csoport szervezettségében fokozatok vannak Az önző egyedeket csoportba kényszerítő
Az állatok szociális szerveződése, csoport vagy magány? Csoport sok egyed együtt, fontosak az egyedek közötti kapcsolatok a csoport szervezettségében fokozatok vannak Az önző egyedeket csoportba kényszerítő
Mérés és adatgyűjtés
 Mérés és adatgyűjtés 9. óra Mingesz Róbert Szegedi Tudományegyetem 2012. április 2. MA - 9. óra Verzió: 2.1 Utolsó frissítés: 2012. április 2. 1/42 Tartalom I 1 További műszerek 2 Multifinkciós műszerek
Mérés és adatgyűjtés 9. óra Mingesz Róbert Szegedi Tudományegyetem 2012. április 2. MA - 9. óra Verzió: 2.1 Utolsó frissítés: 2012. április 2. 1/42 Tartalom I 1 További műszerek 2 Multifinkciós műszerek
Evans-Searles fluktuációs tétel Crooks fluktuációs tétel Jarzynski egyenlőség
 Evans-Searles fluktuációs tétel Crooks fluktuációs tétel Jarzynski egyenlőség Osváth Szabolcs Evans-Searles fluktuációs tétel Denis J Evans, Ezechiel DG Cohen, Gary P Morriss (1993) Denis J Evans, Debra
Evans-Searles fluktuációs tétel Crooks fluktuációs tétel Jarzynski egyenlőség Osváth Szabolcs Evans-Searles fluktuációs tétel Denis J Evans, Ezechiel DG Cohen, Gary P Morriss (1993) Denis J Evans, Debra
Bevezetés a kvantum-informatikába és kommunikációba 2015/2016 tavasz
 Bevezetés a kvantum-informatikába és kommunikációba 2015/2016 tavasz Kvantumkapuk, áramkörök 2016. március 3. A kvantummechanika posztulátumai (1-2) 1. Állapotleírás Zárt fizikai rendszer aktuális állapota
Bevezetés a kvantum-informatikába és kommunikációba 2015/2016 tavasz Kvantumkapuk, áramkörök 2016. március 3. A kvantummechanika posztulátumai (1-2) 1. Állapotleírás Zárt fizikai rendszer aktuális állapota
Autonóm jármű forgalomszimulátorba illesztése
 Autonóm jármű forgalomszimulátorba illesztése Szalai Mátyás 2018 Konzulens: Dr. Tettamanti Tamás A szimulációs feladat Miért hasznos? Biztonságos környezetben nyújt lehetőséget az autonóm járművek forgalmi
Autonóm jármű forgalomszimulátorba illesztése Szalai Mátyás 2018 Konzulens: Dr. Tettamanti Tamás A szimulációs feladat Miért hasznos? Biztonságos környezetben nyújt lehetőséget az autonóm járművek forgalmi
A Markovi forgalomanalízis legújabb eredményei és ezek alkalmazása a távközlő hálózatok teljesítményvizsgálatában
 A Markovi forgalomanalízis legújabb eredményei és ezek alkalmazása a távközlő hálózatok teljesítményvizsgálatában Horváth Gábor ghorvath@hit.bme.hu (Horváth András, Telek Miklós) - p. 1 Motiváció, problémafelvetés
A Markovi forgalomanalízis legújabb eredményei és ezek alkalmazása a távközlő hálózatok teljesítményvizsgálatában Horváth Gábor ghorvath@hit.bme.hu (Horváth András, Telek Miklós) - p. 1 Motiváció, problémafelvetés
Mozgó jármű helyzetének és tájolásának meghatározása alacsony árú GNSS és inerciális érzékelők szoros csatolású integrációjával
 Mozgó jármű helyzetének és tájolásának meghatározása alacsony árú GNSS és inerciális érzékelők szoros csatolású integrációjával Farkas Márton Rédey István Geodéziai Szeminárium 2019. április 2. Áttekintés
Mozgó jármű helyzetének és tájolásának meghatározása alacsony árú GNSS és inerciális érzékelők szoros csatolású integrációjával Farkas Márton Rédey István Geodéziai Szeminárium 2019. április 2. Áttekintés
Vállalatirányítási rendszerek
 Vállalatirányítási rendszerek Varga Zsigmond Üzletfejlesztési igazgató Budapest, 2015. március 03. Nyilvános Motiváció? 2013 SAP AG. All rights reserved. 2 Adatrögzítés része a fejlődésnek 3 Mestermunkától
Vállalatirányítási rendszerek Varga Zsigmond Üzletfejlesztési igazgató Budapest, 2015. március 03. Nyilvános Motiváció? 2013 SAP AG. All rights reserved. 2 Adatrögzítés része a fejlődésnek 3 Mestermunkától
Széchenyi István Egyetem www.sze.hu/~herno
 Oldal: 1/6 A feladat során megismerkedünk a C# és a LabVIEW összekapcsolásának egy lehetőségével, pontosabban nagyon egyszerű C#- ban írt kódból fordítunk DLL-t, amit meghívunk LabVIEW-ból. Az eljárás
Oldal: 1/6 A feladat során megismerkedünk a C# és a LabVIEW összekapcsolásának egy lehetőségével, pontosabban nagyon egyszerű C#- ban írt kódból fordítunk DLL-t, amit meghívunk LabVIEW-ból. Az eljárás
Takács Árpád K+F irányok
 Takács Árpád K+F irányok 2016. 06. 09. arpad.takacs@adasworks.com A jövőre tervezünk Az AdasWorks mesterséges intelligencia alapú szoftverterfejlesztéssel és teljes önvezető megoldásokkal forradalmasítja
Takács Árpád K+F irányok 2016. 06. 09. arpad.takacs@adasworks.com A jövőre tervezünk Az AdasWorks mesterséges intelligencia alapú szoftverterfejlesztéssel és teljes önvezető megoldásokkal forradalmasítja
Az állatok szociális szerveződése, csoport vagy magány?
 Az állatok szociális szerveződése, csoport vagy magány? Csoport sok egyed együtt, fontosak az egyedek közötti kapcsolatok a csoport szervezettségében fokozatok vannak Az önző egyedeket csoportba kényszerítő
Az állatok szociális szerveződése, csoport vagy magány? Csoport sok egyed együtt, fontosak az egyedek közötti kapcsolatok a csoport szervezettségében fokozatok vannak Az önző egyedeket csoportba kényszerítő
OPTIKAI KÖVETK VETÉS. Steiner Henriette április 29.
 OPTIKAI KÖVETK VETÉS Lehetőségek és limitáci ciók Steiner Henriette 2009. április 29. MEGISMERÉS = Érzékelés + Fogalomalkotás MEGISMERÉS = Érzékelés + Fogalomalkotás LÁTÁS = SZEM + AGY MEGISMERÉS = Érzékelés
OPTIKAI KÖVETK VETÉS Lehetőségek és limitáci ciók Steiner Henriette 2009. április 29. MEGISMERÉS = Érzékelés + Fogalomalkotás MEGISMERÉS = Érzékelés + Fogalomalkotás LÁTÁS = SZEM + AGY MEGISMERÉS = Érzékelés
Gépjármű fekete doboz az útvonalrekonstrukció új eszközei
 Gépjármű fekete doboz az útvonalrekonstrukció új eszközei Dr. Melegh Gábor Budapesti Műszaki Egyetem Gépjárművek Tanszék H-1111 Budapest Stoczek u. 6 melegh@auto.bme.hu Dr. Szalay Zsolt Inventure Autóelektronikai
Gépjármű fekete doboz az útvonalrekonstrukció új eszközei Dr. Melegh Gábor Budapesti Műszaki Egyetem Gépjárművek Tanszék H-1111 Budapest Stoczek u. 6 melegh@auto.bme.hu Dr. Szalay Zsolt Inventure Autóelektronikai
Formula Sound árlista
 MIXERS FF-6000; FF6000P Formula Sound 160 6 channel dual format DJ mixer with removable fader panel. (Supplied with linear faders) Formula Sound 160P As above but with PRO X crossfade fitted. Formula Sound
MIXERS FF-6000; FF6000P Formula Sound 160 6 channel dual format DJ mixer with removable fader panel. (Supplied with linear faders) Formula Sound 160P As above but with PRO X crossfade fitted. Formula Sound
Vezetéknélküli Érzékelő Hálózatok
 Dr. Kasza Tamás Vezetéknélküli Érzékelő Hálózatok Budapest, 2011. február 16. www.meetthescientist.hu 1 28 Tanulmányok - M.Sc.: - 1994-1999: BME-VIK - 1995-2000: BME-GTK - 1999-2003: BKE - 1997-1998: ELTE-TTK
Dr. Kasza Tamás Vezetéknélküli Érzékelő Hálózatok Budapest, 2011. február 16. www.meetthescientist.hu 1 28 Tanulmányok - M.Sc.: - 1994-1999: BME-VIK - 1995-2000: BME-GTK - 1999-2003: BKE - 1997-1998: ELTE-TTK
Cluster Analysis. Potyó László
 Cluster Analysis Potyó László What is Cluster Analysis? Cluster: a collection of data objects Similar to one another within the same cluster Dissimilar to the objects in other clusters Cluster analysis
Cluster Analysis Potyó László What is Cluster Analysis? Cluster: a collection of data objects Similar to one another within the same cluster Dissimilar to the objects in other clusters Cluster analysis
Performance Modeling of Intelligent Car Parking Systems
 Performance Modeling of Intelligent Car Parking Systems Károly Farkas Gábor Horváth András Mészáros Miklós Telek Technical University of Budapest, Hungary EPEW 2014, Florence, Italy Outline Intelligent
Performance Modeling of Intelligent Car Parking Systems Károly Farkas Gábor Horváth András Mészáros Miklós Telek Technical University of Budapest, Hungary EPEW 2014, Florence, Italy Outline Intelligent
A modern e-learning lehetőségei a tűzoltók oktatásának fejlesztésében. Dicse Jenő üzletfejlesztési igazgató
 A modern e-learning lehetőségei a tűzoltók oktatásának fejlesztésében Dicse Jenő üzletfejlesztési igazgató How to apply modern e-learning to improve the training of firefighters Jenő Dicse Director of
A modern e-learning lehetőségei a tűzoltók oktatásának fejlesztésében Dicse Jenő üzletfejlesztési igazgató How to apply modern e-learning to improve the training of firefighters Jenő Dicse Director of
Internet of Things és Ipar 4.0 az agrárszektorban. Tarcsi Ádám, ELTE Informatikai Kar
 Internet of Things és Ipar 4.0 az agrárszektorban Tarcsi Ádám, ELTE Informatikai Kar ade@inf.elte.hu Ipar 4.0 a 4. ipari forradalom 18. század vége gőzgép, szövőgép, a mechanikus gépek 20. század eleje
Internet of Things és Ipar 4.0 az agrárszektorban Tarcsi Ádám, ELTE Informatikai Kar ade@inf.elte.hu Ipar 4.0 a 4. ipari forradalom 18. század vége gőzgép, szövőgép, a mechanikus gépek 20. század eleje
Decision where Process Based OpRisk Management. made the difference. Norbert Kozma Head of Operational Risk Control. Erste Bank Hungary
 Decision where Process Based OpRisk Management made the difference Norbert Kozma Head of Operational Risk Control Erste Bank Hungary About Erste Group 2010. 09. 30. 2 Erste Bank Hungary Erste Group entered
Decision where Process Based OpRisk Management made the difference Norbert Kozma Head of Operational Risk Control Erste Bank Hungary About Erste Group 2010. 09. 30. 2 Erste Bank Hungary Erste Group entered
Eladni könnyedén? Oracle Sales Cloud. Horváth Tünde Principal Sales Consultant 2014. március 23.
 Eladni könnyedén? Oracle Sales Cloud Horváth Tünde Principal Sales Consultant 2014. március 23. Oracle Confidential Internal/Restricted/Highly Restricted Safe Harbor Statement The following is intended
Eladni könnyedén? Oracle Sales Cloud Horváth Tünde Principal Sales Consultant 2014. március 23. Oracle Confidential Internal/Restricted/Highly Restricted Safe Harbor Statement The following is intended
Adatelemzési eljárások az idegrendszer kutatásban Somogyvári Zoltán
 Adatelemzési eljárások az idegrendszer kutatásban Somogyvári Zoltán MTA KFKI Részecske és Magfizikai Intézet, Biofizikai osztály Az egy adatsorra (idősorra) is alkalmazható módszerek Példa: Az epileptikus
Adatelemzési eljárások az idegrendszer kutatásban Somogyvári Zoltán MTA KFKI Részecske és Magfizikai Intézet, Biofizikai osztály Az egy adatsorra (idősorra) is alkalmazható módszerek Példa: Az epileptikus
Component Soft 1994-2013 és tovább
 Component Soft 1994-2013 és tovább IT szakemberek oktatása, tanácsadás Fő témáink: UNIX/Linux rendszerek, virtualizációs, fürtözési, tároló menedzsment és mentési technológiák Adatbázisok és middleware
Component Soft 1994-2013 és tovább IT szakemberek oktatása, tanácsadás Fő témáink: UNIX/Linux rendszerek, virtualizációs, fürtözési, tároló menedzsment és mentési technológiák Adatbázisok és middleware
Neurális hálózatok bemutató
 Neurális hálózatok bemutató Füvesi Viktor Miskolci Egyetem Alkalmazott Földtudományi Kutatóintézet Miért? Vannak feladatok amelyeket az agy gyorsabban hajt végre mint a konvencionális számítógépek. Pl.:
Neurális hálózatok bemutató Füvesi Viktor Miskolci Egyetem Alkalmazott Földtudományi Kutatóintézet Miért? Vannak feladatok amelyeket az agy gyorsabban hajt végre mint a konvencionális számítógépek. Pl.:
Perspektívák a sertések precíziós takarmányozásában. Halas Veronika, PhD Kaposvári Egyetem Takarmányozástani tanszék
 Perspektívák a sertések precíziós takarmányozásában Halas Veronika, PhD Kaposvári Egyetem Takarmányozástani tanszék Az EU országok vágott sertés kibocsájtása (millió hízó) Eurostat (2014) 1000 koca Az
Perspektívák a sertések precíziós takarmányozásában Halas Veronika, PhD Kaposvári Egyetem Takarmányozástani tanszék Az EU országok vágott sertés kibocsájtása (millió hízó) Eurostat (2014) 1000 koca Az
Robotika. Relatív helymeghatározás Odometria
 Robotika Relatív helymeghatározás Odometria Differenciális hajtás c m =πd n /nc e c m D n C e n = hány mm-t tesz meg a robot egy jeladó impulzusra = névleges kerék átmérő = jeladó fölbontása (impulzus/ford.)
Robotika Relatív helymeghatározás Odometria Differenciális hajtás c m =πd n /nc e c m D n C e n = hány mm-t tesz meg a robot egy jeladó impulzusra = névleges kerék átmérő = jeladó fölbontása (impulzus/ford.)
Alapvető bimolekuláris kémiai reakciók dinamikája
 Alapvető bimolekuláris kémiai reakciók dinamikája Czakó Gábor Emory University (008 011) és ELTE (011. december ) Szedres, 01. október 13. A Polanyi szabályok Haladó mozgás (ütközési energia) vs. rezgő
Alapvető bimolekuláris kémiai reakciók dinamikája Czakó Gábor Emory University (008 011) és ELTE (011. december ) Szedres, 01. október 13. A Polanyi szabályok Haladó mozgás (ütközési energia) vs. rezgő
Kezelési Útmutató DVR 411M Digitális rögzítő. (Cserélhető HDD-vel)
") Kezelési Útmutató DVR 411M Digitális rögzítő. (Cserélhető HDD-vel) 1. Tartalomjegyzék: 1. Tartalomjegyzék... 3 2. A készülék bemutatása...4 3. A DVR üzembe helyezése...5 A. Csatlakoztatás a monitorhoz...5
Kezelési Útmutató DVR 411M Digitális rögzítő. (Cserélhető HDD-vel) 1. Tartalomjegyzék: 1. Tartalomjegyzék... 3 2. A készülék bemutatása...4 3. A DVR üzembe helyezése...5 A. Csatlakoztatás a monitorhoz...5
Miről lesz szó? Videó tartalom elemzés (VCA) leegyszerűsített működése Kültéri védelem Közúthálózat megfigyelés Emberszámlálás
 leegyszerűsített működése Kültéri védelem Közúthálózat megfigyelés Emberszámlálás") Videóanalitikát mindenhova! Princz Adorján Miről lesz szó? Videó tartalom elemzés (VCA) leegyszerűsített működése Kültéri védelem Közúthálózat megfigyelés Emberszámlálás VCA alapú detektorok Videótartalom
Videóanalitikát mindenhova! Princz Adorján Miről lesz szó? Videó tartalom elemzés (VCA) leegyszerűsített működése Kültéri védelem Közúthálózat megfigyelés Emberszámlálás VCA alapú detektorok Videótartalom
Rezgésdiagnosztika. Diagnosztika 02 --- 1
 Rezgésdiagnosztika Diagnosztika 02 --- 1 Diagnosztika 02 --- 2 A rezgéskép elemzésével kimutatható gépészeti problémák Minden gép, mely tartalmaz forgó részt (pl. motor, generátor, szivattyú, ventilátor,
Rezgésdiagnosztika Diagnosztika 02 --- 1 Diagnosztika 02 --- 2 A rezgéskép elemzésével kimutatható gépészeti problémák Minden gép, mely tartalmaz forgó részt (pl. motor, generátor, szivattyú, ventilátor,
IV.7 MÓDSZER KIDOLGOZÁSA FELHASZNÁLÓI ADATOK VÉDELMÉRE MOBIL ALKALMAZÁSOK ESETÉN
 infokommunikációs technológiák IV.7 MÓDSZER KIDOLGOZÁSA FELHASZNÁLÓI ADATOK VÉDELMÉRE MOBIL ALKALMAZÁSOK ESETÉN ANTAL Margit, SZABÓ László Zsolt 2015, január 8. BEVEZETÉS A KUTATÁS CÉLJA A felhasználó
infokommunikációs technológiák IV.7 MÓDSZER KIDOLGOZÁSA FELHASZNÁLÓI ADATOK VÉDELMÉRE MOBIL ALKALMAZÁSOK ESETÉN ANTAL Margit, SZABÓ László Zsolt 2015, január 8. BEVEZETÉS A KUTATÁS CÉLJA A felhasználó
Járműkövető rendszer RÉSZLETES ISMERTETŐ
 efollow Járműkövető rendszer RÉSZLETES ISMERTETŐ Tartalomjegyzék 1.1. BEVEZETÉS...3 1.2. JÁRMŰKÖVETŐ RENDSZER FELADATA...3 2.1. MIT TUD AZ EFOLLOW?...3 2.2. MILYEN JÁRMŰADATOKAT MÉR JELENLEG A RENDSZER?...3
efollow Járműkövető rendszer RÉSZLETES ISMERTETŐ Tartalomjegyzék 1.1. BEVEZETÉS...3 1.2. JÁRMŰKÖVETŐ RENDSZER FELADATA...3 2.1. MIT TUD AZ EFOLLOW?...3 2.2. MILYEN JÁRMŰADATOKAT MÉR JELENLEG A RENDSZER?...3
A ROBOTIKA ALKALMAZÁSÁNAK LEHETŐSÉGEI A HAD- ÉS BIZTONSÁGTECHNIKAI MÉRNÖK KÉPZÉSBEN
 IV. Évfolyam 1. szám - 2009. március Tibenszkyné Fórika Krisztina Zrínyi Miklós Nemzetvédelmi Egyetem tibenszkyne.forika.krisztina@zmne.hu A ROBOTIKA ALKALMAZÁSÁNAK LEHETŐSÉGEI A HAD- ÉS BIZTONSÁGTECHNIKAI
IV. Évfolyam 1. szám - 2009. március Tibenszkyné Fórika Krisztina Zrínyi Miklós Nemzetvédelmi Egyetem tibenszkyne.forika.krisztina@zmne.hu A ROBOTIKA ALKALMAZÁSÁNAK LEHETŐSÉGEI A HAD- ÉS BIZTONSÁGTECHNIKAI
Multimédia az audiovizuális beszédfeldolgozásban. dr. Czap László
 Multimédia az audiovizuális beszédfeldolgozásban dr. Czap László Miskolci Egyetem Villamosmérnöki Intézet Automatizálási Tanszék Miskolc, Egyetemváros e-mail: czap@mazsola.iit.uni-miskolc.hu Abstract Audio-visual
Multimédia az audiovizuális beszédfeldolgozásban dr. Czap László Miskolci Egyetem Villamosmérnöki Intézet Automatizálási Tanszék Miskolc, Egyetemváros e-mail: czap@mazsola.iit.uni-miskolc.hu Abstract Audio-visual
Szenzor- és méréstechnikai fejlesztések biomechanikai vizsgálatokhoz
 Szenzor- és méréstechnikai fejlesztések biomechanikai vizsgálatokhoz SOHA RUDOLF FERENC DEBRECENI EGYETEM Témavezető: István Dr. Szabó 1 Tartalomjegyzék Gyorsulásmérő szenzor alapú mérőrendszer Járásvizsgálat
Szenzor- és méréstechnikai fejlesztések biomechanikai vizsgálatokhoz SOHA RUDOLF FERENC DEBRECENI EGYETEM Témavezető: István Dr. Szabó 1 Tartalomjegyzék Gyorsulásmérő szenzor alapú mérőrendszer Járásvizsgálat
Komplex hálózatok moduláris szerkezete
 Az OTKA K68669 azonosítójú, Komplex hálózatok moduláris szerkezete című pályázat szakmai beszámolója 1. Bevezetés Az utóbbi évtizedben a hálózati megközelítés több fontos sikert hozott biológiai, technológiai,
Az OTKA K68669 azonosítójú, Komplex hálózatok moduláris szerkezete című pályázat szakmai beszámolója 1. Bevezetés Az utóbbi évtizedben a hálózati megközelítés több fontos sikert hozott biológiai, technológiai,
Cloud computing. Cloud computing. Dr. Bakonyi Péter.
 Cloud computing Cloud computing Dr. Bakonyi Péter. 1/24/2011 1/24/2011 Cloud computing 2 Cloud definició A cloud vagy felhő egy platform vagy infrastruktúra Az alkalmazások és szolgáltatások végrehajtására
Cloud computing Cloud computing Dr. Bakonyi Péter. 1/24/2011 1/24/2011 Cloud computing 2 Cloud definició A cloud vagy felhő egy platform vagy infrastruktúra Az alkalmazások és szolgáltatások végrehajtására
Szenzorok megismerése Érzékelők használata
 Szenzorok megismerése Érzékelők használata Sicz-Mesziár János sicz.mj@gmail.com 2011. április 14. OE-NIK Mi a szenzor? Olyan elem, amely a környezet jellemzőit méri és arról információval szolgál, valamilyen
Szenzorok megismerése Érzékelők használata Sicz-Mesziár János sicz.mj@gmail.com 2011. április 14. OE-NIK Mi a szenzor? Olyan elem, amely a környezet jellemzőit méri és arról információval szolgál, valamilyen
Összefoglalás és gyakorlás
 Összefoglalás és gyakorlás High Speed Networks Laboratory 1 / 28 Hálózatok jellemző paraméterei High Speed Networks Laboratory 2 / 28 Evolúció alkotta adatbázis Önszerveződő adatbázis = (struktúra, lekérdezés)
Összefoglalás és gyakorlás High Speed Networks Laboratory 1 / 28 Hálózatok jellemző paraméterei High Speed Networks Laboratory 2 / 28 Evolúció alkotta adatbázis Önszerveződő adatbázis = (struktúra, lekérdezés)
Klaszterezés, 2. rész
 Klaszterezés, 2. rész Csima Judit BME, VIK, Számítástudományi és Információelméleti Tanszék 208. április 6. Csima Judit Klaszterezés, 2. rész / 29 Hierarchikus klaszterezés egymásba ágyazott klasztereket
Klaszterezés, 2. rész Csima Judit BME, VIK, Számítástudományi és Információelméleti Tanszék 208. április 6. Csima Judit Klaszterezés, 2. rész / 29 Hierarchikus klaszterezés egymásba ágyazott klasztereket
Agresszió. Interspecifikus agonisztikus viselkedés
 Agresszió Interspecifikus agonisztikus viselkedés Az agresszió értelmezése Humán vs. etológiai (negatív/antiszociális vs. adaptív/természetes) Etológia vs. Viselkedésökológia vs. állatorvostudomány különböző
Agresszió Interspecifikus agonisztikus viselkedés Az agresszió értelmezése Humán vs. etológiai (negatív/antiszociális vs. adaptív/természetes) Etológia vs. Viselkedésökológia vs. állatorvostudomány különböző
Kezdőlap > Termékek > Szabályozó rendszerek > EASYLAB és TCU-LON-II szabályozó rendszer LABCONTROL > Érzékelő rendszerek > Típus DS-TRD-01
 Típus DS-TRD FOR EASYLAB FUME CUPBOARD CONTROLLERS Sash distance sensor for the variable, demand-based control of extract air flows in fume cupboards Sash distance measurement For fume cupboards with vertical
Típus DS-TRD FOR EASYLAB FUME CUPBOARD CONTROLLERS Sash distance sensor for the variable, demand-based control of extract air flows in fume cupboards Sash distance measurement For fume cupboards with vertical
R3-COP. Resilient Reasoning Robotic Co-operating Systems. Autonóm rendszerek tesztelése egy EU-s projektben
 ARTEMIS Joint Undertaking The public private partnership in embedded systems R3-COP Resilient Reasoning Robotic Co-operating Systems Autonóm rendszerek tesztelése egy EU-s projektben Micskei Zoltán Budapesti
ARTEMIS Joint Undertaking The public private partnership in embedded systems R3-COP Resilient Reasoning Robotic Co-operating Systems Autonóm rendszerek tesztelése egy EU-s projektben Micskei Zoltán Budapesti
Valószínűségi modellellenőrzés Markov döntési folyamatokkal
 Valószínűségi modellellenőrzés Markov döntési folyamatokkal Hajdu Ákos Szoftver verifikáció és validáció 2015.12.09. Budapesti Műszaki és Gazdaságtudományi Egyetem Méréstechnika és Információs Rendszerek
Valószínűségi modellellenőrzés Markov döntési folyamatokkal Hajdu Ákos Szoftver verifikáció és validáció 2015.12.09. Budapesti Műszaki és Gazdaságtudományi Egyetem Méréstechnika és Információs Rendszerek
Irodából a terepre: a mobil informatika (alkalmazás bemutató)
") Irodából a terepre: a mobil informatika (alkalmazás bemutató) Készítette: Dátum: Fűr Attila 2014.10.30. Bevezetés A mobilitás szerepe átértékelődik Gazdasági környezet változik: Válság, megszorítások kevesebb
Irodából a terepre: a mobil informatika (alkalmazás bemutató) Készítette: Dátum: Fűr Attila 2014.10.30. Bevezetés A mobilitás szerepe átértékelődik Gazdasági környezet változik: Válság, megszorítások kevesebb
Fuzzy Rendszerek. 3. előadás Alkalmazások. Ballagi Áron egyetemi adjunktus. Széchenyi István Egyetem, Automatizálási Tsz.
 Fuzzy Rendszerek 3. előadás Alkalmazások Ballagi Áron egyetemi adjunktus Széchenyi István Egyetem, Automatizálási Tsz. 1 IEEE fuzzy szabályozások felmérése [1996] Több mint 1100 sikeres fuzzy alkalmazás
Fuzzy Rendszerek 3. előadás Alkalmazások Ballagi Áron egyetemi adjunktus Széchenyi István Egyetem, Automatizálási Tsz. 1 IEEE fuzzy szabályozások felmérése [1996] Több mint 1100 sikeres fuzzy alkalmazás
Információs Rendszerek Szakirány
 Információs Rendszerek Szakirány Laki Sándor Kommunikációs Hálózatok Kutatócsoport ELTE IK - Információs Rendszerek Tanszék lakis@elte.hu http://lakis.web.elte.hu Információs Rendszerek szakirány Közös
Információs Rendszerek Szakirány Laki Sándor Kommunikációs Hálózatok Kutatócsoport ELTE IK - Információs Rendszerek Tanszék lakis@elte.hu http://lakis.web.elte.hu Információs Rendszerek szakirány Közös
Pro sensors Measurement sensors to IP Thermo Professional network
 Pro sensors Measurement sensors to IP Thermo Professional network T-05 Temperature sensor TH-05 Temperature, humidity sensor THP- 05 Temperature, humidity, air pressure, air velocity, wet sensors indoor
Pro sensors Measurement sensors to IP Thermo Professional network T-05 Temperature sensor TH-05 Temperature, humidity sensor THP- 05 Temperature, humidity, air pressure, air velocity, wet sensors indoor
Construction of a cube given with its centre and a sideline
 Transformation of a plane of projection Construction of a cube given with its centre and a sideline Exercise. Given the center O and a sideline e of a cube, where e is a vertical line. Construct the projections
Transformation of a plane of projection Construction of a cube given with its centre and a sideline Exercise. Given the center O and a sideline e of a cube, where e is a vertical line. Construct the projections
Report on the main results of the surveillance under article 11 for annex II, IV and V species (Annex B)
") 0.1 Member State HU 0.2.1 Species code 1353 0.2.2 Species name Canis aureus 0.2.3 Alternative species scientific name 0.2.4 Common name aranysakál 1. National Level 1.1 Maps 1.1.1 Distribution Map Yes
0.1 Member State HU 0.2.1 Species code 1353 0.2.2 Species name Canis aureus 0.2.3 Alternative species scientific name 0.2.4 Common name aranysakál 1. National Level 1.1 Maps 1.1.1 Distribution Map Yes
Matematikai alapú lokalizációs keretrendszer
 Matematikai alapú lokalizációs keretrendszer Szakács Tamás, Ruzsa Zoltán, Parisek Zsolt, Király Roland, Hajagos Henrik Eszterházy Károly Főiskola - Matematikai és Informatikai Intézet szakacstam@gmail.com,
Matematikai alapú lokalizációs keretrendszer Szakács Tamás, Ruzsa Zoltán, Parisek Zsolt, Király Roland, Hajagos Henrik Eszterházy Károly Főiskola - Matematikai és Informatikai Intézet szakacstam@gmail.com,
Természettudományi és Technológiai Kar
 Üdvözlés, Bemutatkozás Természettudományi és Technológiai Kar Dr. Szabó István intézetigazgató Munka tudomány ipar egészségügy itthon külföldön Karrier Bsc Fizika Képzések Villamosmérnök osztatlan...
Üdvözlés, Bemutatkozás Természettudományi és Technológiai Kar Dr. Szabó István intézetigazgató Munka tudomány ipar egészségügy itthon külföldön Karrier Bsc Fizika Képzések Villamosmérnök osztatlan...
ROSA SISTEMI HENGERGÖRGŐS MEGVEZETÉS ROSA SISTEMI MONOGUIDE
 ROSA SISTEMI HENGERGÖRGŐS MEGVEZETÉS TARTALOMJEGYZÉK / T.O.C. Technikai információk / Technical informations.............................................98 Hengergörgős vezetékek és kocsik / Recirculating
ROSA SISTEMI HENGERGÖRGŐS MEGVEZETÉS TARTALOMJEGYZÉK / T.O.C. Technikai információk / Technical informations.............................................98 Hengergörgős vezetékek és kocsik / Recirculating
Gyakorlatok. VITMMA09 Okos város MSc mellékspecializáció
 Gyakorlatok VITMMA09 Okos város MSc mellékspecializáció ITS gyakorlatok Cél Gyakorlati tudással kiegészíteni az elméleti ismereteket Példák a való világból, korlátozott de valósághű környezetben Tervezés,
Gyakorlatok VITMMA09 Okos város MSc mellékspecializáció ITS gyakorlatok Cél Gyakorlati tudással kiegészíteni az elméleti ismereteket Példák a való világból, korlátozott de valósághű környezetben Tervezés,
UX-EL LESZ A PROJEKTED SIKERES UX trendek és bámulatos megtérülési mutatók
 DR. RUNG ANDRÁS ÜGYFELEINK Ergománia tulajdonos-ügyvezető UX-EL LESZ A PROJEKTED SIKERES UX trendek és bámulatos megtérülési mutatók Magyarország első UX ügynöksége 15 év tapasztalat, pénzügyi specializáció
DR. RUNG ANDRÁS ÜGYFELEINK Ergománia tulajdonos-ügyvezető UX-EL LESZ A PROJEKTED SIKERES UX trendek és bámulatos megtérülési mutatók Magyarország első UX ügynöksége 15 év tapasztalat, pénzügyi specializáció
Cloud computing Dr. Bakonyi Péter.
 Cloud computing Dr. Bakonyi Péter. 1/24/2011 Cloud computing 1/24/2011 Cloud computing 2 Cloud definició A cloud vagy felhő egy platform vagy infrastruktúra Az alkalmazások és szolgáltatások végrehajtására
Cloud computing Dr. Bakonyi Péter. 1/24/2011 Cloud computing 1/24/2011 Cloud computing 2 Cloud definició A cloud vagy felhő egy platform vagy infrastruktúra Az alkalmazások és szolgáltatások végrehajtására
Részecske azonosítás kísérleti módszerei
 Részecske azonosítás kísérleti módszerei Galgóczi Gábor Előadás vázlata A részecske azonosítás létjogosultsága Részecske azonosítás: Módszerek Detektorok ALICE-ból példa A részecskeazonosítás létjogosultsága
Részecske azonosítás kísérleti módszerei Galgóczi Gábor Előadás vázlata A részecske azonosítás létjogosultsága Részecske azonosítás: Módszerek Detektorok ALICE-ból példa A részecskeazonosítás létjogosultsága
Anyagvizsgálati módszerek Mérési adatok feldolgozása. Anyagvizsgálati módszerek
 Anyagvizsgálati módszerek Mérési adatok feldolgozása Anyagvizsgálati módszerek Pannon Egyetem Mérnöki Kar Anyagvizsgálati módszerek Statisztika 1/ 22 Mérési eredmények felhasználása Tulajdonságok hierarchikus
Anyagvizsgálati módszerek Mérési adatok feldolgozása Anyagvizsgálati módszerek Pannon Egyetem Mérnöki Kar Anyagvizsgálati módszerek Statisztika 1/ 22 Mérési eredmények felhasználása Tulajdonságok hierarchikus
Nyers légifotók feldolgozási lehetőségei ESRI platformon. CSUNDERLIK LÁSZLÓ GDi Esri
 Nyers légifotók feldolgozási lehetőségei ESRI platformon CSUNDERLIK LÁSZLÓ GDi Esri Általános specifikációk Platfrom - Fix szárny, kopter Szenzorok - Képalkotó szenzor (Digitális, Multispektrális) - Lencse
Nyers légifotók feldolgozási lehetőségei ESRI platformon CSUNDERLIK LÁSZLÓ GDi Esri Általános specifikációk Platfrom - Fix szárny, kopter Szenzorok - Képalkotó szenzor (Digitális, Multispektrális) - Lencse
THS710A, THS720A, THS730A & THS720P TekScope Reference
 THS710A, THS720A, THS730A & THS720P TekScope Reference 070-9741-01 Getting Started 1 Connect probes or leads. 2 Choose SCOPE 3 or METER mode. Press AUTORANGE. Copyright Tektronix, Inc. Printed in U.S.A.
THS710A, THS720A, THS730A & THS720P TekScope Reference 070-9741-01 Getting Started 1 Connect probes or leads. 2 Choose SCOPE 3 or METER mode. Press AUTORANGE. Copyright Tektronix, Inc. Printed in U.S.A.
Intelligens Rendszerek
 Intelligens Rendszerek Robotok http://mobil.nik.uni-obuda.hu http://mobil.nik.uni-obuda.hu/tantargyak/irg/segedanyagok/ B Biology Biológiai mintára készített, E Electronics elektronikusan működtetett,
Intelligens Rendszerek Robotok http://mobil.nik.uni-obuda.hu http://mobil.nik.uni-obuda.hu/tantargyak/irg/segedanyagok/ B Biology Biológiai mintára készített, E Electronics elektronikusan működtetett,
A LEGO Mindstorms EV3 programozása
 A LEGO Mindstorms EV3 programozása 1. A fejlesztői környezet bemutatása 12. Az MPU6050 gyorsulás- és szögsebességmérő szenzor Orosz Péter 1 Felhasznált irodalom LEGO MINDSTORMS EV3: Felhasználói útmutató
A LEGO Mindstorms EV3 programozása 1. A fejlesztői környezet bemutatása 12. Az MPU6050 gyorsulás- és szögsebességmérő szenzor Orosz Péter 1 Felhasznált irodalom LEGO MINDSTORMS EV3: Felhasználói útmutató
Geokémia gyakorlat. 1. Geokémiai adatok értelmezése: egyszerű statisztikai módszerek. Geológus szakirány (BSc) Dr. Lukács Réka
 Dr. Lukács Réka") Geokémia gyakorlat 1. Geokémiai adatok értelmezése: egyszerű statisztikai módszerek Geológus szakirány (BSc) Dr. Lukács Réka MTA-ELTE Vulkanológiai Kutatócsoport e-mail: reka.harangi@gmail.com ALAPFOGALMAK:
Geokémia gyakorlat 1. Geokémiai adatok értelmezése: egyszerű statisztikai módszerek Geológus szakirány (BSc) Dr. Lukács Réka MTA-ELTE Vulkanológiai Kutatócsoport e-mail: reka.harangi@gmail.com ALAPFOGALMAK:
Terepi adatgyűjtés mobil eszközökkel a természetvédelemben
 T E R M É S Z E T V É D E L E M Terepi adatgyűjtés mobil eszközökkel a természetvédelemben Dr. Takács András Attila Takács Gábor Biró Csaba Tartalom Bevezetés háttér információk GPS Természetvédelmi feladatok
T E R M É S Z E T V É D E L E M Terepi adatgyűjtés mobil eszközökkel a természetvédelemben Dr. Takács András Attila Takács Gábor Biró Csaba Tartalom Bevezetés háttér információk GPS Természetvédelmi feladatok
Tisztán kivehetı tendencia: kommunikációs hálózatok egyre bonyolultabbakká válnak Hálózat bonyolultsága
 @ Budapest University of Technology and Economics Nagy hálózatok evolúciója Gulyás András, Heszberger Zalán High Speed Networks Laboratory Internet trendek Tisztán kivehetı tendencia: kommunikációs hálózatok
@ Budapest University of Technology and Economics Nagy hálózatok evolúciója Gulyás András, Heszberger Zalán High Speed Networks Laboratory Internet trendek Tisztán kivehetı tendencia: kommunikációs hálózatok
Norway Grants. Az akkumulátor mikromenedzsment szabályozás - BMMR - fejlesztés technológiai és műszaki újdonságai. Kakuk Zoltán, Vision 95 Kft.
 Norway Grants AKKUMULÁTOR REGENERÁCIÓS ÉS Az akkumulátor mikromenedzsment szabályozás - BMMR - fejlesztés technológiai és műszaki újdonságai Kakuk Zoltán, Vision 95 Kft. 2017.04.25. Rendszer szintű megoldás
Norway Grants AKKUMULÁTOR REGENERÁCIÓS ÉS Az akkumulátor mikromenedzsment szabályozás - BMMR - fejlesztés technológiai és műszaki újdonságai Kakuk Zoltán, Vision 95 Kft. 2017.04.25. Rendszer szintű megoldás
First experiences with Gd fuel assemblies in. Tamás Parkó, Botond Beliczai AER Symposium 2009.09.21 25.
 First experiences with Gd fuel assemblies in the Paks NPP Tams Parkó, Botond Beliczai AER Symposium 2009.09.21 25. Introduction From 2006 we increased the heat power of our units by 8% For reaching this
First experiences with Gd fuel assemblies in the Paks NPP Tams Parkó, Botond Beliczai AER Symposium 2009.09.21 25. Introduction From 2006 we increased the heat power of our units by 8% For reaching this
CSALÁDI KUTYA PROGRAM
 CSALÁDI KUTYA PROGRAM HÍRLEVÉL - JÚNIUS Szerkesztette: Szánthó Flóra és Kovács Krisztina TARTALOM 1 2 3 Tanszéki események Do as I do szeminárium 52. Animal Behaviour Society konferencia, Alaszka SPARCS
CSALÁDI KUTYA PROGRAM HÍRLEVÉL - JÚNIUS Szerkesztette: Szánthó Flóra és Kovács Krisztina TARTALOM 1 2 3 Tanszéki események Do as I do szeminárium 52. Animal Behaviour Society konferencia, Alaszka SPARCS
IKT trendek és tapasztalatok a BME szemszögéből
 IKT trendek és tapasztalatok a BME szemszögéből Dr. Charaf Hassan, BME hassan@aut.bme.hu 1 Napirend IT alkalmazási irányok: Gartner 2012- Mobil adat forgalom: CISCO 2012- IKT Trendek BME-IKT BME Példák
IKT trendek és tapasztalatok a BME szemszögéből Dr. Charaf Hassan, BME hassan@aut.bme.hu 1 Napirend IT alkalmazási irányok: Gartner 2012- Mobil adat forgalom: CISCO 2012- IKT Trendek BME-IKT BME Példák
Intelligens Közlekedési Rendszerek 2
 Intelligens Közlekedési Rendszerek 2 Máté Miklós 2016 Október 11 1 / 14 Szenzor (érzékelő): mérés, detektálás Mérés elmélet emlékeztető Jó mérőműszer tulajdonságai Érzékeny a mérendő tulajdonságra Érzéketlen
Intelligens Közlekedési Rendszerek 2 Máté Miklós 2016 Október 11 1 / 14 Szenzor (érzékelő): mérés, detektálás Mérés elmélet emlékeztető Jó mérőműszer tulajdonságai Érzékeny a mérendő tulajdonságra Érzéketlen
Individuális viselkedés versus. szociális rovaroknál. Markó Bálint Taxonómiai és Ökológiai Tanszék
 Individuális viselkedés versus kollektív mintázatok a szociális rovaroknál Markó Bálint Taxonómiai és Ökológiai Tanszék BBTE Szociális rovarok: hangyák, bizonyos méh- és darázscsoportok, termeszek, néhány
Individuális viselkedés versus kollektív mintázatok a szociális rovaroknál Markó Bálint Taxonómiai és Ökológiai Tanszék BBTE Szociális rovarok: hangyák, bizonyos méh- és darázscsoportok, termeszek, néhány
Quadkopter szimulációja LabVIEW környezetben Simulation of a Quadcopter with LabVIEW
 Quadkopter szimulációja LabVIEW környezetben Simulation of a Quadcopter with LabVIEW T. KISS 1 P. T. SZEMES 2 1University of Debrecen, kiss.tamas93@gmail.com 2University of Debrecen, szemespeter@eng.unideb.hu
Quadkopter szimulációja LabVIEW környezetben Simulation of a Quadcopter with LabVIEW T. KISS 1 P. T. SZEMES 2 1University of Debrecen, kiss.tamas93@gmail.com 2University of Debrecen, szemespeter@eng.unideb.hu
Dobzhansky: In Biology nothing makes sense except in the light of Evolution.
 Dobzhansky: In Biology nothing makes sense except in the light of Evolution. Az Evolúcióbiológia Története Molnár István im54@invitel.hu Mai témák 1. Mi az evolúció? 2. Hogyan alakult ki a mai evolúciós
Dobzhansky: In Biology nothing makes sense except in the light of Evolution. Az Evolúcióbiológia Története Molnár István im54@invitel.hu Mai témák 1. Mi az evolúció? 2. Hogyan alakult ki a mai evolúciós
Moore & more than Moore
 1 Moore & more than Moore Fürjes Péter E-mail:, www.mems.hu 2 A SZILÍCIUM (silex) 3 A SZILÍCIUM Felfedező: Jons Berzelius 1823, Svédország Természetes előfordulás: gránit, kvarc, agyag, homok 2. leggyakoribb
1 Moore & more than Moore Fürjes Péter E-mail:, www.mems.hu 2 A SZILÍCIUM (silex) 3 A SZILÍCIUM Felfedező: Jons Berzelius 1823, Svédország Természetes előfordulás: gránit, kvarc, agyag, homok 2. leggyakoribb
Statistical Inference
 Petra Petrovics Statistical Inference 1 st lecture Descriptive Statistics Inferential - it is concerned only with collecting and describing data Population - it is used when tentative conclusions about
Petra Petrovics Statistical Inference 1 st lecture Descriptive Statistics Inferential - it is concerned only with collecting and describing data Population - it is used when tentative conclusions about
StP Műszaki Fejlesztő, Gyártó és Kereskedelmi Kft.
 StP Műszaki Fejlesztő, Gyártó és Kereskedelmi Kft. verzió: 1.6.1 Elérhetőségek 1158 Budapest, Késmárk u. 11-13. Telefon: +36 1 410-0556; +36 20 480-5933 Fax: +36 1 414-0913 E-mail: info@stp.hu Technikai
StP Műszaki Fejlesztő, Gyártó és Kereskedelmi Kft. verzió: 1.6.1 Elérhetőségek 1158 Budapest, Késmárk u. 11-13. Telefon: +36 1 410-0556; +36 20 480-5933 Fax: +36 1 414-0913 E-mail: info@stp.hu Technikai
Teljesítmény Mérés. Tóth Zsolt. Miskolci Egyetem. Tóth Zsolt (Miskolci Egyetem) Teljesítmény Mérés / 20
 Teljesítmény Mérés / 20") Teljesítmény Mérés Tóth Zsolt Miskolci Egyetem 2013 Tóth Zsolt (Miskolci Egyetem) Teljesítmény Mérés 2013 1 / 20 Tartalomjegyzék 1 Bevezetés 2 Visual Studio Kód metrikák Performance Explorer Tóth Zsolt
Teljesítmény Mérés Tóth Zsolt Miskolci Egyetem 2013 Tóth Zsolt (Miskolci Egyetem) Teljesítmény Mérés 2013 1 / 20 Tartalomjegyzék 1 Bevezetés 2 Visual Studio Kód metrikák Performance Explorer Tóth Zsolt
Correlation & Linear Regression in SPSS
 Petra Petrovics Correlation & Linear Regression in SPSS 4 th seminar Types of dependence association between two nominal data mixed between a nominal and a ratio data correlation among ratio data Correlation
Petra Petrovics Correlation & Linear Regression in SPSS 4 th seminar Types of dependence association between two nominal data mixed between a nominal and a ratio data correlation among ratio data Correlation
Idõ-ütemterv há lók - I. t 5 4
 lõadás:folia.doc Idõ-ütemterv há lók - I. t s v u PRT time/cost : ( Program valuation & Review Technique ) ( Program Értékelõ és Áttekintõ Technika ) semény-csomópontú, valószínûségi változókkal dolgozó
lõadás:folia.doc Idõ-ütemterv há lók - I. t s v u PRT time/cost : ( Program valuation & Review Technique ) ( Program Értékelõ és Áttekintõ Technika ) semény-csomópontú, valószínûségi változókkal dolgozó
STATISZTIKA ELŐADÁS ÁTTEKINTÉSE. Mi a modell? Matematikai statisztika. 300 dobás. sűrűségfüggvénye. Egyenletes eloszlás
 ELŐADÁS ÁTTEKINTÉSE STATISZTIKA 7. Előadás Egyenletes eloszlás Binomiális eloszlás Normális eloszlás Standard normális eloszlás Normális eloszlás mint modell /56 Matematikai statisztika Reprezentatív mintavétel
ELŐADÁS ÁTTEKINTÉSE STATISZTIKA 7. Előadás Egyenletes eloszlás Binomiális eloszlás Normális eloszlás Standard normális eloszlás Normális eloszlás mint modell /56 Matematikai statisztika Reprezentatív mintavétel
AZ AUTOMATIZÁLT MIG/MAG HEGESZTÉS VALÓS IDEJŰ MINŐSÉGBIZTOSÍTÁSI LEHETŐSÉGEI
 Gradus Vol 2, No 2 (2015) 135-141 ISSN 2064-8014 AZ AUTOMATIZÁLT MIG/MAG HEGESZTÉS VALÓS IDEJŰ MINŐSÉGBIZTOSÍTÁSI LEHETŐSÉGEI REAL TIME QUALITY ASSURANCE POTENTIALS IN AUTOMATED MIG/MAG WELDING PROCESSES
Gradus Vol 2, No 2 (2015) 135-141 ISSN 2064-8014 AZ AUTOMATIZÁLT MIG/MAG HEGESZTÉS VALÓS IDEJŰ MINŐSÉGBIZTOSÍTÁSI LEHETŐSÉGEI REAL TIME QUALITY ASSURANCE POTENTIALS IN AUTOMATED MIG/MAG WELDING PROCESSES