KÖZÚTI FORGALOMIRÁNYÍTÁS
|
|
|
- Laura Budai
- 5 évvel ezelőtt
- Látták:
Átírás

1 KÖZÚTI FORGALOMIRÁNYÍTÁS kozlekedes.bme.hu facebook.com/kozlekkar Dr. Varga István Közlekedés- és Járműirányítási Tanszék
2 Felsőfokú oktatás BSc(7 félév): Közlekedésmérnöki alapszak Járműmérnöki alapszak Logisztikai mérnöki alapszak MSc(4 félév): Közlekedésmérnöki mesterszak Járműmérnöki mesterszak Logisztikai mérnöki mesterszak Autonóm járműirányítási mérnök mesterszak PhD (8 félév): Kandó Kálmán Doktori Iskola 2
3 JKL rendszerek tárgy A BME kutatóegyetemi programban a JKL kiemelt kutatási terület Előzmények: KOKUA114 Közlekedési rendszerek KOGJA115 Járműrendszerek KOKUA116 Logisztikai rendszerek KOEAA117 Üzemi szállítási rendszerek Számonkérés Visszajelzések! 3




4 Járműtechnika, közlekedés, logisztika Közlekedés Járműtechnika Logisztika 4
5 A közúti közlekedés megfigyelése Közútiforgalomirányítás 5
6 Háttéranyagok, személyek Varga István PhD TettamantiTamás PhD Csikós Alfréd PhD LuspayTamás PhD Bede Zsuzsanna PhD Esztergár-Kiss Domokos PhD Horváth Márton Tamás 6


7 Könyvek 7
8 I. Bevezetés 8
9 Forgalomirányítás célja Feltárni a közúti közlekedésben meglévő irányítási problémákat és hatékony megoldást adni azokra 9
10 Motiváció Miért? A folyamatosan növekvő járműforgalom mellett a rendelkezésre álló közúti infrastruktúra csak korlátozottan növelhető. Szükséges a hatékony, forgalomfüggő, dinamikus irányítás! Megoldás A közúti közlekedés sajátosságai miatt elsősorban a korszerű, robosztus irányítási algoritmusok szolgálhatnak megfelelő minőségi megoldásokkal. 10


11 Szempontok -Korlátok Biztonság 11
12 A forgalomirányítás felépítése A közlekedési irányító rendszer Közúti forgalomirányító berendezés Vezérlés, döntéshozatal Közúti forgalomirányító központ Döntéshozatal Központi vezérlés, döntéshozatal Beavatkozás, lámpakapcsolás, stb. Beavatkozás Forgalmi adatgyűjtés, előfeldolgozás Beavatkozás, távvezérlés, stb. Forgalmi adatgyűjtés, előfeldolgozás Adatgyűjtés A vezérelt csomópont(ok) A vezérelt csomópontok, városrészek, városok Az irányított közlekedési folyamat (hálózat) 12


13 A közúti közlekedés megfigyelése 1934 Bruce D. Greenshields 13
14 A járműforgalom modellezése Reuschel, majd 1953-ban Pipesa járművek időbeli, egymást követő mozgását leíró úgynevezett járműkövetési modellt fejlesztenek ki, ez a mai napig meghatározó jelentőségű alapösszefüggéseket tartalmaz. (mikro) Elkészül a makroszkopikus szemléletű, a folyadékáramlás analógiájára épített úgynevezett LWR modell (Lighthillés Whitham, és tőlük függetlenül Richards) Az LWR modell mérföldkőnek számított a forgalmi folyamatok leírásában. (makro) 14
15 A járműforgalom irányítása Webster 1958 (Egyedi jelzőlámpa irányítás) Robertson 1969 (Transyt, jelzőlámpa hálózat). Állapottérben: Nahi és Trivedi 1973 (Állapotbecslés) Cremer és Keller 1980, 1986 (Állapotbecslés) Nihan és Davis 1983,1987 (Állapotbecslés) Papageorgiou 1983,1991(Állapotbecslés, irányítás) Zijpp 1994, 1997 (Állapotbecslés) de Schutter és Hegyi 2002 (MPC autópálya irányítás) Varga 2006 (MPC városi irányítás) 15

16 A járműforgalom leírása, jellemzése 16
17 A hullámsebesség 17
18 II. A közúti járműforgalom mérése és becslése 18
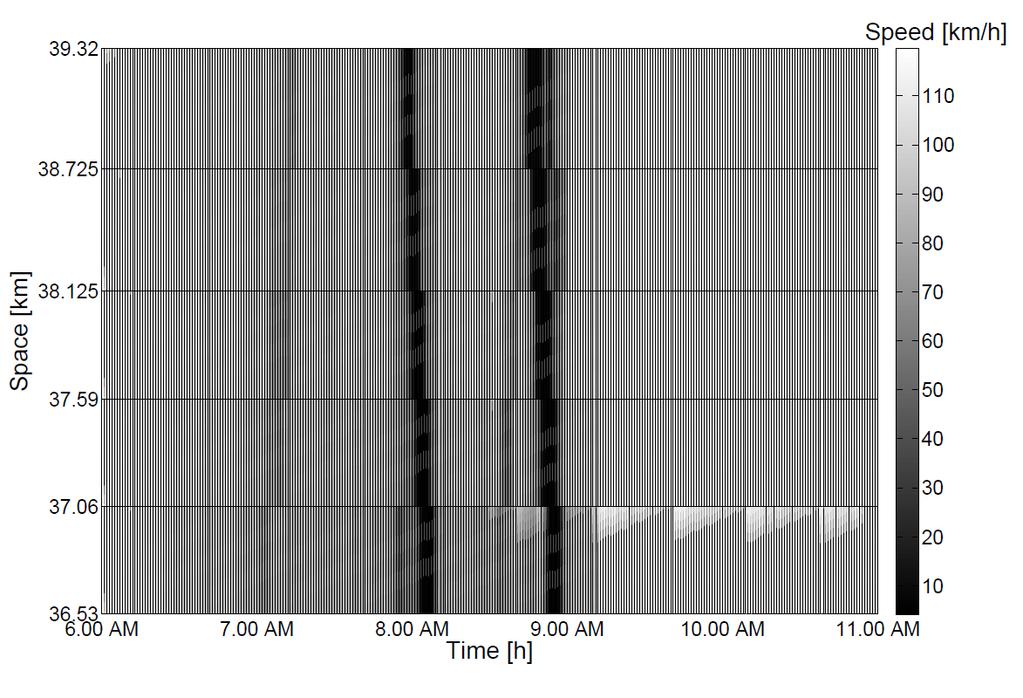
19 Tér-idő szemlélet 19
20 Járműérzékelés -detektálás Nagyon sokféle fizikai elven lehet a járműveket észlelni. A két legelterjedtebb: Az induktív hurokdetektor A képfeldolgozáson alapuló járműérzékelő (videó detektor) 20
21 A hurokdetektor 21

22 A hurokdetektor 22

23 A hurokdetektor 23

24 A video detektor 24

25 A video detektor 25

26 A video detektor 26

27 A video detektor 27

28 A video detektor 28
29 Forgalmi állapotok, forgalmi változók és jellemzők becslése 29
30 A célforgalmi mátrix A mátrix a járműáramlat honnanhová információját adja meg: Egyedi kereszteződésben, Körforgalomban, Autópálya szakaszon, Városi hálózatban. 3 2 Irányok x 11 x 12 x 13 x 14 2 x 21 x 22 x 23 x 24 3 x 31 x 32 x 33 x 34 4 x 41 x 42 x 43 x
31 q ζ Az állapot-megfigyelő (cmhe) 0 x m q o=1 x io ζ Korlátozások: io ( k) Kereszteződés modell cmhe megfigyelő feltételek: 0<=x ij <=1; Σ x j =1 = 1 zajok: ζ,ˆ, v wˆ ^ x ( k) 1 cmhe = constrained Moving Horizon Estimation w v Ψ k y ( k + 1) = x ( k) w ( k) yo ( k) = q ( k) x ( k) + v x io io + n i=1 Kereszteződés x ˆ j k Axˆ j k Gwˆ + 1 = + j k y j = Cxˆ j k + vˆ j k i io io o ( k) A cmhe az állapotok várható értékét becsüli meg úgy, hogy modell következőkben felírt Ψ funkcionált minimalizálja és kielégíti a dinamikai egyenletet és mérési egyenletet, valamint a korlátozásokat is. cm HE megfigyelő k 1 k T 1 T 1 T 1 * = wˆ ˆ ˆ ˆ ˆ ˆ k N 1feltételek: kq0 wk N 1 k + w j kq w j k + v jv k R v j k + Ψk N j= k N j= k N 0<=xij<=1; Σ xj=1 min zajok: ˆ ˆ ) ( xk N 1, wk N 1 k,..., wk 1 k ζ, vˆ, wˆ ^ x x ˆk N k xk N wˆ = + k N 1 k w Ψ k ( j = k N 1,..., k 1) ( j = k N 1,..., k) y 31
32 Egyedi kereszteződés jelzőlámpa szabályozása állapottérben 32
33 A modell Sorfelépülés: x(k) x(k+1) x be (k) Kihaladás: x ki (k) x f (k) q m Tc Q( t) ( t) = 0 T Q = q B m = u q c m,1 0 q m, q 0 m,3 q x ki_opt (k) m,4 x ( k) x( k + 1) = Ax( k) + q f k uk ( k) Állapotegyenlet: be [ I B] + v ( k) + x ( ) Mérési(kimeneti) egyenlet: y( k) = Cx( k) + v ( k) y 33
34 q be u x f A szabályozó v q v y Kereszteződés forgalmi modellje Szabályozó xˆ Torlódás detektáló szűrő f y célfüggvény A szabályozó algoritmus alapja egy LQ optimális szabályozó, amely a becsült torlódás alapján képes az irányítás átkonfigurálására. J = 1 2 K T T [ x ( k) Qx( k) + u ( k) Ru( k) ] k = 0 Bk ( i, i) uk ( i) + x f k( i) uk + 1 ( i) = i = 1... n B ( i, i) k Bk ( i, i) uk ( i) + x f k( i) Bk + 1 ( i, i) = i = 1... n u ( i) k FPRG hibadetektáló szűrőt (torlódásdetektáló szűrő) rk = Mz z k+1 = Fz k k Ey Hy k k + Du k 34
35 Városi forgalomirányítás Forgalomirányító központok 35
36 A forgalomirányító központokról általában Forgalomirányító központ (FIK): adott közlekedési hálózat forgalomirányító berendezéseit felügyeli és irányítja Irányítás céljai Kapcsolódó csomópontok jelzésképeinek összehangolása A hálózat forgalomtechnikai teljesítménymutatóinak javítása Tömegközlekedés hálózatba illesztése, előnyben részesítése Célfüggvények A forgalom biztonságos lebonyolítása Eljutási idő minimalizálása Megállások számának csökkentése Átbocsátott járműszám növelése Várakozási idő minimalizálása 36
37 A budapesti FIK Siemens Scala Kb csomópont: 2/3-a közvetlenül, valós időben kapcsolódik a központhoz, 1/3-a távfelügyeleti rendszer keretében érhető el Kb. 800 járműérzékelő (főként hurokdetektor) ennek kb. 70 %-a működik üzembiztosan 650 csomópontot kb 450 FB látja el. Ebből: 300 fázisvezérlésű 150 jelzőcsoport vezérlésű 37

38 Kapcsolat a FIK-kelaBME laborból A FIK kommunikációs gerince a Duna mentén, a budai oldalon fut. A BME CH épület melletti FB-ből lett behúzva a BME kertjébe egy üvegszál kábel. Ez a kábel pedig a BME területén lett végighúzva az ST épületig. Az optikai kábelen érkező jelet a laborban egy mediakonverter crosslinkkábelen továbbítható jellé alakítja A crosslinktípusú UTP, kábel már közvetlenül a PC Ethernet csatlakozójába megy. A kapcsolat informatikai megoldása: távoli asztal kapcsolat (Remote Desktop). 38
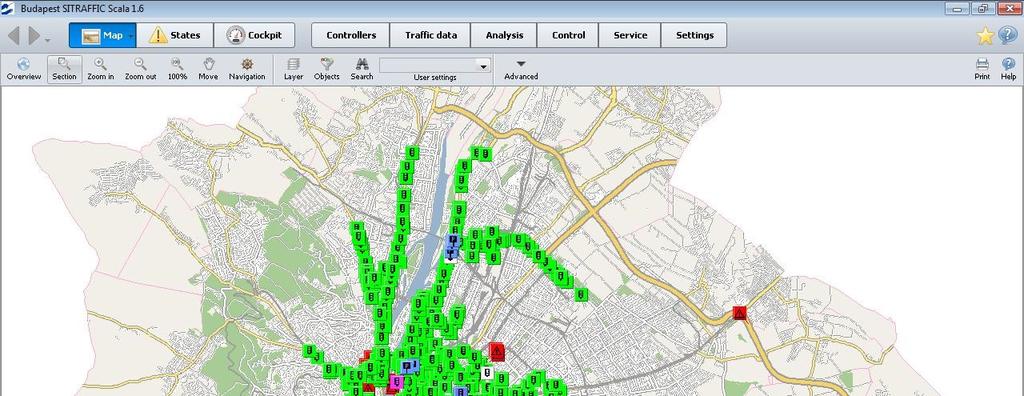

39 Térképes áttekintés 39


40 Hurokdetektor adatok 40

41 On-line jelzésterv 41

42 Helyszínrajz 42
43 Több csomópontból álló hálózat irányítása modell prediktív szabályozással 43/22 43
44 A szabályozó (MPC) nem mérhető zajok mérhető zajok behaladó járműfolyam: q beavatkozó jel: u 0 Csomóponti hálózat forgalmi modellje J ( k) kimenetek: y = 1 2 N p T T [ x ( k) Qxi ( k) + u ( k) Rui ( k) ] i i i= 1 Szabályozó Korlátok: Állapotbecslés és modell alapú predikció N horizontra előállított beavatkozó jel sorozat: u N horizontra előállított állapot sorozat: xˆ Optimalizálás min J Költség függvény J [ xˆ, u] korlátozások, kényszerek [ ] T T T u u u T u = 0 1 L N 1 44/22 u u i i O j i= 1 t t u i MIN MAX t MAX j i i j = 1...J p 44
45 A MALAB szimuláció eredménye Járműszám Járműszám Periódusszám es sor 2-es sor 3-as sor 4-es sor 5-ös sor 6-os sor 9-es 8-as sor 7-es sor sor 10- es sor 11- es sor 12- es sor 13- as sor 14- es sor 15- ös sor 16- os aor Periódusszám es sor 2-es sor 3-as sor 4-es sor 5-ös sor 6-os sor 9-es 8-as sor 7-es sor sor 10- es sor 11- es sor 12- es sor 13- as sor 14- es sor 15- ös sor 16- os sor 16 Legnagyobb kialakult helyi sorhossz (jm) Legnagyobb kialakult összes sorhossz (jm) TUC 2000 (LQ) MPC
46 A teszthálózat: 7 csomópont 7 6 A közlekedési hálózat modellje VISSIM-ben:
47 A szimuláció szoftverkörnyezete FÁJLOK COM INTERFÉSZ M ATLAB SORHOSSZAK VISUAL C++ PROGRAM SORHOSSZAK VISSIM M PC SZABÁLYOZÓ ZÖLDIDŐK SZIMULÁCIÓ- ÉS KOMMUNIKÁCIÓ- VEZÉRLÉS ZÖLDIDŐK KÖZLEKEDÉSI HÁLÓZAT VISSIM, PTV AG., MATLAB, 47

48 A jelenlegi irányító rendszer 48

49 MPC alapú irányító rendszer 49
50 Eredmények Sorhosszak: Teljes utazási idő: Átlagos megállások száma: Control l [m] Old system 302 MPC 249 Control TTT [h] Old system 296 MPC 269 Control n [db] Old system 1.45 MPC % - 9 % - 18 % 50
51 Eredmények Átlagos késési idő: Control t [sec] Old system 71 MPC % Átlagsebesség: Control v [km/h] Old system 18 MPC % 51
52 Az összes sorhossz alakulása 52
53 Zöldidő eloszlás (Harmat u. -SibrikMiklós u.) Green time distribution [%] Directions Old system MPC system 53
54 Szabályozó bemenet zöldidő A zöldidő hosszának változása az egyik csomóponti ágban 54
55 Autópálya forgalomirányítás Összehangolt főpályaés felhajtó szabályozás 55
56 Autópálya forgalom szabályozása Detektor vagy kamera ρ akt Sebességkorlátozás 110 v kijelzett Felhajtáskorlátozás zöld/piros COORDINATED CONTROL LQ CONTROL ρ crit, ρ akt SWITCHING CONTROL 56

57 A forgalom alakulása szabályozás nélküli esetben 57

58 A forgalom alakulása szabályozással 58
59 Eredmények Kihaladt összes jármű Szabályozási forma q ki [J/h] NO CONTROL 4154 COORDINATED CONTROL % Átlagsebesség Szabályozási forma v [km/h] NO CONTROL 34 COORDINATED CONTROL % 59

60 Köszönöm a figyelmüket! 60
A budapesti forgalomirányító központ - Budapest Közút ZRt. - Siemens Scala kliens
 A budapesti forgalomirányító központ - Budapest Közút ZRt. - és a Siemens Scala kliens Dr. Csikós Alfréd, Dr. Tettamanti Tamás, Dr. Varga István BME, Közlekedés- és Járműirányítási Tanszék, 2016. 11. 04.
A budapesti forgalomirányító központ - Budapest Közút ZRt. - és a Siemens Scala kliens Dr. Csikós Alfréd, Dr. Tettamanti Tamás, Dr. Varga István BME, Közlekedés- és Járműirányítási Tanszék, 2016. 11. 04.
Budapesti Forgalomirányító Központ. Siemens Scala kliens. Összeállította: Csikós Alfréd
 Budapesti Forgalomirányító Központ Siemens Scala kliens Összeállította: Csikós Alfréd Budapesti Forgalomirányító Központ Siemens Scala Bevezetés Irányítási célok városban Forgalomtechnikai teljesítménymutatók
Budapesti Forgalomirányító Központ Siemens Scala kliens Összeállította: Csikós Alfréd Budapesti Forgalomirányító Központ Siemens Scala Bevezetés Irányítási célok városban Forgalomtechnikai teljesítménymutatók
Közúti közlekedési automatika. BME, Közlekedés- és Járműirányítási Tanszék
 Közúti közlekedési automatika BME, Közlekedés- és Járműirányítási Tanszék A közúti forgalomirányítás célja A közlekedési folyamatok befolyásolása meghatározott célok elérése érdekében. A forgalomirányító
Közúti közlekedési automatika BME, Közlekedés- és Járműirányítási Tanszék A közúti forgalomirányítás célja A közlekedési folyamatok befolyásolása meghatározott célok elérése érdekében. A forgalomirányító
Autóbusz előnyben részesítésének lehetőségei
 Autóbusz előnyben részesítésének lehetőségei 1 Pécsett Pásztor Petronella Konzulensek: Dr. Bede Zsuzsanna, Dr. Tettamanti Tamás Külső konzulens: Kiss Géza 2 Bevezetés Pécs: utazások ~40%-a tömegközlekedéssel
Autóbusz előnyben részesítésének lehetőségei 1 Pécsett Pásztor Petronella Konzulensek: Dr. Bede Zsuzsanna, Dr. Tettamanti Tamás Külső konzulens: Kiss Géza 2 Bevezetés Pécs: utazások ~40%-a tömegközlekedéssel
SITRAFFIC Scala városi forgalomirányító központ. Copyright Siemens Zrt. 2010. All rights reserved.
 SITRAFFIC Scala városi forgalomirányító központ A SITRAFFIC forgalomirányítási rendszer felépítése Közlekedés menedzsment szint SITRAFFIC Concert Városi / regionális közlekedés menedzsment Alrendszerek
SITRAFFIC Scala városi forgalomirányító központ A SITRAFFIC forgalomirányítási rendszer felépítése Közlekedés menedzsment szint SITRAFFIC Concert Városi / regionális közlekedés menedzsment Alrendszerek
A közúti közlekedés irányítása. Dr. Tettamanti Tamás, BME Közlekedés- és Járműirányítási Tanszék,
 A közúti közlekedés irányítása Dr. Tettamanti Tamás, BME Közlekedés- és Járműirányítási Tanszék, 2016. 09. 30. Brief history of road traffic control 1868: the first traffic light installed in London at
A közúti közlekedés irányítása Dr. Tettamanti Tamás, BME Közlekedés- és Járműirányítási Tanszék, 2016. 09. 30. Brief history of road traffic control 1868: the first traffic light installed in London at
Autópályák forgalmának modellezése és irányítása állapottérben
 Autópályák forgalmának modellezése és irányítása állapottérben Luspay amás, Varga István, Bokor József Magyar udományos Akadémia Számítástechnikai és Automatizálási Kutató Intézet Rendszer- és Irányításelméleti
Autópályák forgalmának modellezése és irányítása állapottérben Luspay amás, Varga István, Bokor József Magyar udományos Akadémia Számítástechnikai és Automatizálási Kutató Intézet Rendszer- és Irányításelméleti
Autonóm - és hagyományos közúti járművek alkotta közlekedési rendszerek összehasonlító elemzése
 Budapesti Műszaki és Gazdaságtudományi Egyetem Közlekedésmérnöki és Járműmérnöki Kar Közlekedés- és Járműirányítási Tanszék Záróvizsga 2017.06.20. Autonóm - és hagyományos közúti járművek alkotta közlekedési
Budapesti Műszaki és Gazdaságtudományi Egyetem Közlekedésmérnöki és Járműmérnöki Kar Közlekedés- és Járműirányítási Tanszék Záróvizsga 2017.06.20. Autonóm - és hagyományos közúti járművek alkotta közlekedési
A LEAN FOLYAMATFEJLESZTŐ SZAKMÉRNÖK ÉS SPECIALISTA KÉPZÉS ILLESZKEDÉSE A BME KJK KÉPZÉSI RENDSZERÉBE
 A LEAN FOLYAMATFEJLESZTŐ SZAKMÉRNÖK ÉS SPECIALISTA KÉPZÉS ILLESZKEDÉSE A BME KJK KÉPZÉSI RENDSZERÉBE Dr. Bóna Krisztián egyetemi docens szakfelelős 10+3 GTK 10 ÉMK GPK 10+2 MŰEGYETEM 9+1 TTK Műegyetem
A LEAN FOLYAMATFEJLESZTŐ SZAKMÉRNÖK ÉS SPECIALISTA KÉPZÉS ILLESZKEDÉSE A BME KJK KÉPZÉSI RENDSZERÉBE Dr. Bóna Krisztián egyetemi docens szakfelelős 10+3 GTK 10 ÉMK GPK 10+2 MŰEGYETEM 9+1 TTK Műegyetem
CROCODILE projektek a Budapest Közút Zrt.-nél
 CROCODILE projektek a Budapest Közút Zrt.-nél Cooperation of Road Operators for COnsistent and Dynamic Information LEvels Csillik Ádám fejlesztési mérnök Fővárosi ITS projektek 2006 2008 CONNECT II. és
CROCODILE projektek a Budapest Közút Zrt.-nél Cooperation of Road Operators for COnsistent and Dynamic Information LEvels Csillik Ádám fejlesztési mérnök Fővárosi ITS projektek 2006 2008 CONNECT II. és
Közlekedési áramlatok MSc. Csomóponti-, útvonali eljutási lehetőségek minősítése
 Közlekedési áramlatok MSc Csomóponti-, útvonali eljutási lehetőségek minősítése minősítése jogszabályi esetben Az alárendelt áramlatból egy meghatározott forgalmi művelet csak akkor végezhető el, ha a
Közlekedési áramlatok MSc Csomóponti-, útvonali eljutási lehetőségek minősítése minősítése jogszabályi esetben Az alárendelt áramlatból egy meghatározott forgalmi művelet csak akkor végezhető el, ha a
INTELLIGENS KÖZLEKEDK
 INTELLIGENS KÖZLEKEDK ZLEKEDÉSI FEJLESZTÉSEK SEK A FŐVÁROSBANF 10 év alatt az ITS alapoktól a működő szolgáltatásokig Rónai Gergely osztályvezető ITS Hungary 10 - jubileumi workshop - 2016. november 24.
INTELLIGENS KÖZLEKEDK ZLEKEDÉSI FEJLESZTÉSEK SEK A FŐVÁROSBANF 10 év alatt az ITS alapoktól a működő szolgáltatásokig Rónai Gergely osztályvezető ITS Hungary 10 - jubileumi workshop - 2016. november 24.
Korszerű mérési és irányítási módszerek városi közúti közlekedési hálózatban
 Korszerű mérési és irányítási módszerek városi közúti közlekedési hálózatban Dr. Tettamanti Tamás BME Közlekedés- és Járműirányítási Tanszék 2013. november. 13. MTA KTB ünnepi tudományos ülése 1 A közlekedési
Korszerű mérési és irányítási módszerek városi közúti közlekedési hálózatban Dr. Tettamanti Tamás BME Közlekedés- és Járműirányítási Tanszék 2013. november. 13. MTA KTB ünnepi tudományos ülése 1 A közlekedési
Irányításelmélet és technika II.
 Irányításelmélet és technika II. Modell-prediktív szabályozás Magyar Attila Pannon Egyetem Műszaki Informatikai Kar Villamosmérnöki és Információs Rendszerek Tanszék amagyar@almos.vein.hu 2010 november
Irányításelmélet és technika II. Modell-prediktív szabályozás Magyar Attila Pannon Egyetem Műszaki Informatikai Kar Villamosmérnöki és Információs Rendszerek Tanszék amagyar@almos.vein.hu 2010 november
ÉRZÉKELŐK ÉS BEAVATKOZÓK I. 0. TANTÁRGY ISMERTETŐ
 ÉRZÉKELŐK ÉS BEAVATKOZÓK I. 0. TANTÁRGY ISMERTETŐ Dr. Soumelidis Alexandros 2018.09.06. BME KÖZLEKEDÉSMÉRNÖKI ÉS JÁRMŰMÉRNÖKI KAR 32708-2/2017/INTFIN SZÁMÚ EMMI ÁLTAL TÁMOGATOTT TANANYAG A tárgy célja
ÉRZÉKELŐK ÉS BEAVATKOZÓK I. 0. TANTÁRGY ISMERTETŐ Dr. Soumelidis Alexandros 2018.09.06. BME KÖZLEKEDÉSMÉRNÖKI ÉS JÁRMŰMÉRNÖKI KAR 32708-2/2017/INTFIN SZÁMÚ EMMI ÁLTAL TÁMOGATOTT TANANYAG A tárgy célja
Intelligens közlekedési rendszerek ÁTTEKINTÉS, MŰKÖDÉS. Schuchmann Gábor
 Intelligens közlekedési rendszerek ÁTTEKINTÉS, MŰKÖDÉS ADATIGÉNY sávonkénti járműszám járműosztályok sebességek Környezeti körülmények szabályozási körülmények hálózati adottságok korábbi adatok (változás
Intelligens közlekedési rendszerek ÁTTEKINTÉS, MŰKÖDÉS ADATIGÉNY sávonkénti járműszám járműosztályok sebességek Környezeti körülmények szabályozási körülmények hálózati adottságok korábbi adatok (változás
Különböző kiépítésű körforgalmak vizsgálata és. csomóponti irányítással VISSIM szimulátorban. összehasonlító analízise jelzőlámpás
 Különböző kiépítésű körforgalmak vizsgálata és összehasonlító analízise jelzőlámpás csomóponti irányítással VISSIM szimulátorban Készítette: Sukupčák Marián Konzulens: Dr. Tettamanti Tamás 216. Mindenek
Különböző kiépítésű körforgalmak vizsgálata és összehasonlító analízise jelzőlámpás csomóponti irányítással VISSIM szimulátorban Készítette: Sukupčák Marián Konzulens: Dr. Tettamanti Tamás 216. Mindenek
Forgalmi modellezés BMEKOKUM209
 BME Közlekedésüzemi és Közlekedésgazdasági Tanszék Forgalmi modellezés BMEKOKUM209 Szimulációs modellezés Dr. Juhász János A forgalmi modellezés célja A közlekedési igények bővülése és a motorizáció növekedése
BME Közlekedésüzemi és Közlekedésgazdasági Tanszék Forgalmi modellezés BMEKOKUM209 Szimulációs modellezés Dr. Juhász János A forgalmi modellezés célja A közlekedési igények bővülése és a motorizáció növekedése
Villamosok előnyben részesítése Bakcsi Máté március 19.
 Villamosok előnyben részesítése Bakcsi Máté 2013. március 19. 1 2013.03.07. Közösségi közlekedés előnyben részesítése Buszsávok: - oldalfekvésű - középen vezetett - villamos vágányzónán Budapesten kb.
Villamosok előnyben részesítése Bakcsi Máté 2013. március 19. 1 2013.03.07. Közösségi közlekedés előnyben részesítése Buszsávok: - oldalfekvésű - középen vezetett - villamos vágányzónán Budapesten kb.
Beltéri autonóm négyrotoros helikopter szabályozó rendszerének kifejlesztése és hardware-in-the-loop tesztelése
 Beltéri autonóm négyrotoros helikopter szabályozó rendszerének kifejlesztése és hardware-in-the-loop tesztelése Regula Gergely, Lantos Béla BME Villamosmérnöki és Informatikai Kar Irányítástechnika és
Beltéri autonóm négyrotoros helikopter szabályozó rendszerének kifejlesztése és hardware-in-the-loop tesztelése Regula Gergely, Lantos Béla BME Villamosmérnöki és Informatikai Kar Irányítástechnika és
Közlekedési áramlatok MSc. A közúti áramlatok levezetésére szolgáló infrastruktúra jellemzése, fázisidőtervezés, hangolás
 Közlekedési áramlatok MSc A közúti áramlatok levezetésére szolgáló infrastruktúra jellemzése, fázisidőtervezés, hangolás A csomópontok és útvonalak minősítésének szükségessége A csomópontok és útvonalak
Közlekedési áramlatok MSc A közúti áramlatok levezetésére szolgáló infrastruktúra jellemzése, fázisidőtervezés, hangolás A csomópontok és útvonalak minősítésének szükségessége A csomópontok és útvonalak
Alter Róbert Báró Csaba Sensor Technologies Kft
 Közúti forgalomelemzés kamerával e_traffic Alter Róbert Báró Csaba Sensor Technologies Kft Előadás témái Cégbemutató Videó analitikai eljárások Forgalomszámláló eszközök összehasonlítása e_traffic forgalomelemző
Közúti forgalomelemzés kamerával e_traffic Alter Róbert Báró Csaba Sensor Technologies Kft Előadás témái Cégbemutató Videó analitikai eljárások Forgalomszámláló eszközök összehasonlítása e_traffic forgalomelemző
FUTÁR projekt A forgalomirányítási és utastájékoztatási rendszer fejlesztése
 FUTÁR projekt A forgalomirányítási és utastájékoztatási rendszer fejlesztése 2012. szeptember 18. Berger András projektvezető Budapesti Közlekedési Központ FUTÁR projekt célok és eszközök Célok A közösségi
FUTÁR projekt A forgalomirányítási és utastájékoztatási rendszer fejlesztése 2012. szeptember 18. Berger András projektvezető Budapesti Közlekedési Központ FUTÁR projekt célok és eszközök Célok A közösségi
Infrastruktúra tárgy Városi (települési) közlekedés
 közlekedés") Infrastruktúra tárgy Városi (települési) közlekedés Kálnoki Kis Sándor okl. mérnök, okl. városrendezı szakmérnök 2007. április 18. Városi közlekedési módok Vasúti közlekedés Közúti közlekedés Közösségi
Infrastruktúra tárgy Városi (települési) közlekedés Kálnoki Kis Sándor okl. mérnök, okl. városrendezı szakmérnök 2007. április 18. Városi közlekedési módok Vasúti közlekedés Közúti közlekedés Közösségi
Autonóm jármű forgalomszimulátorba illesztése
 Autonóm jármű forgalomszimulátorba illesztése Szalai Mátyás 2018 Konzulens: Dr. Tettamanti Tamás A szimulációs feladat Miért hasznos? Biztonságos környezetben nyújt lehetőséget az autonóm járművek forgalmi
Autonóm jármű forgalomszimulátorba illesztése Szalai Mátyás 2018 Konzulens: Dr. Tettamanti Tamás A szimulációs feladat Miért hasznos? Biztonságos környezetben nyújt lehetőséget az autonóm járművek forgalmi
Intelligens közlekedési fejlesztések a fővárosban
 Intelligens közlekedési fejlesztések a fővárosban Rónai Gergely osztályvezető XVI. Városi közlekedés aktuális kérdései - 2016. szeptember 8-9. Fővárosi ITS trendek ITS térnyerése a szakmai gondolkodásban
Intelligens közlekedési fejlesztések a fővárosban Rónai Gergely osztályvezető XVI. Városi közlekedés aktuális kérdései - 2016. szeptember 8-9. Fővárosi ITS trendek ITS térnyerése a szakmai gondolkodásban
Gondolatok a versenyképes tömegközlekedésről
 Gondolatok a versenyképes tömegközlekedésről I. Magyar Közlekedési Konferencia Kádi Ottó Versenyképesség az az állapot, amikor egy cég sikeresen képes a saját piacán értékesíteni a termékeit, szolgáltatásait.
Gondolatok a versenyképes tömegközlekedésről I. Magyar Közlekedési Konferencia Kádi Ottó Versenyképesség az az állapot, amikor egy cég sikeresen képes a saját piacán értékesíteni a termékeit, szolgáltatásait.
CHARACTERIZATION OF PEOPLE
 CONFERENCE ABOUT THE STATUS AND FUTURE OF THE EDUCATIONAL AND R&D SERVICES FOR THE VEHICLE INDUSTRY CHARACTERIZATION OF PEOPLE MOVEMENT BY USING MOBILE CELLULAR INFORMATION László Nádai "Smarter Transport"
CONFERENCE ABOUT THE STATUS AND FUTURE OF THE EDUCATIONAL AND R&D SERVICES FOR THE VEHICLE INDUSTRY CHARACTERIZATION OF PEOPLE MOVEMENT BY USING MOBILE CELLULAR INFORMATION László Nádai "Smarter Transport"
A központi forgalomirányítás technológiájának 25 éves fejlődése további lehetőségek. Copyright Siemens Zrt. 2010. All rights reserved.
 A központi forgalomirányítás technológiájának 25 éves fejlődése további lehetőségek A telematikai alkalmazások technológiai fejlődésének kulcs elemei és mérföldkövei Informatika: - számítási és tárolási
A központi forgalomirányítás technológiájának 25 éves fejlődése további lehetőségek A telematikai alkalmazások technológiai fejlődésének kulcs elemei és mérföldkövei Informatika: - számítási és tárolási
KOJSA141 Mechanika v 6 Elfogadva. Elektrotechnikaelektronika v 6
 Járműmérnök BSc Régi BSc kód Régi BSc megnevezés ea gy lab kövkr Új BSc kód Új BSc megnevezés ea gy lab kövkr Megjegyzés Feltétel TE90AX00 Matematika A1a 4 2 0 v 6 TE90AX00 Matematika A1a 4 2 0 v 6 Elfogadva
Járműmérnök BSc Régi BSc kód Régi BSc megnevezés ea gy lab kövkr Új BSc kód Új BSc megnevezés ea gy lab kövkr Megjegyzés Feltétel TE90AX00 Matematika A1a 4 2 0 v 6 TE90AX00 Matematika A1a 4 2 0 v 6 Elfogadva
SITRAFFIC CANTO. Kommunikációs rendszer, műszaki összefoglaló. I&S ITS U PSC, Version 1.4, 24.11.2006
 Kommunikációs rendszer, műszaki összefoglaló I&S ITS U PSC, Version 1.4, 24.11.2006 Áttekintés (1) A CANTO elnevezés a következő kifejezés rövidítése: Communication in Advanced New Technology for Outstations.
Kommunikációs rendszer, műszaki összefoglaló I&S ITS U PSC, Version 1.4, 24.11.2006 Áttekintés (1) A CANTO elnevezés a következő kifejezés rövidítése: Communication in Advanced New Technology for Outstations.
A jövő útjai - Intelligens közlekedési rendszerek az üzemeltetésben
 A jövő útjai - Intelligens közlekedési rendszerek az üzemeltetésben Tomaschek Tamás Attila forgalomszabályozási csoportvezető 41. Útügyi Napok Balatonfüred, 2016. szeptember 21-22. A pálya elválaszthatatlan
A jövő útjai - Intelligens közlekedési rendszerek az üzemeltetésben Tomaschek Tamás Attila forgalomszabályozási csoportvezető 41. Útügyi Napok Balatonfüred, 2016. szeptember 21-22. A pálya elválaszthatatlan
Dr. Tóth János egy. docens
 Budapesti Műszaki és Gazdaságtudományi Egyetem Közlekedésmérnöki és Járműmérnöki Kar Közlekedésüzemi és Közlekedésgazdasági Tanszék KÖZLEKEDÉSI IGÉNYEK JELLEMZŐI - A FORGALOM ELŐREBECSLÉSE Dr. Tóth János
Budapesti Műszaki és Gazdaságtudományi Egyetem Közlekedésmérnöki és Járműmérnöki Kar Közlekedésüzemi és Közlekedésgazdasági Tanszék KÖZLEKEDÉSI IGÉNYEK JELLEMZŐI - A FORGALOM ELŐREBECSLÉSE Dr. Tóth János
Haszongépj. Németh. Huba. és s Fejlesztési Budapest. Kutatási. Knorr-Bremse. 2004. November 17. Knorr-Bremse 19.11.
 Haszongépj pjármű fékrendszer intelligens vezérl rlése Németh Huba Knorr-Bremse Kutatási és s Fejlesztési si Központ, Budapest 2004. November 17. Knorr-Bremse 19.11.2004 Huba Németh 1 Tartalom Motiváció
Haszongépj pjármű fékrendszer intelligens vezérl rlése Németh Huba Knorr-Bremse Kutatási és s Fejlesztési si Központ, Budapest 2004. November 17. Knorr-Bremse 19.11.2004 Huba Németh 1 Tartalom Motiváció
A forgalmi modellezés eszközei, módszerei, szintjei
 Budapesti Műszaki és Gazdaságtudományi Egyetem Közlekedésmérnöki és Járműmérnöki Kar Közlekedésüzemi és Közlekedésgazdasági Tanszék A forgalmi modellezés eszközei, módszerei, szintjei Kózel Miklós St.
Budapesti Műszaki és Gazdaságtudományi Egyetem Közlekedésmérnöki és Járműmérnöki Kar Közlekedésüzemi és Közlekedésgazdasági Tanszék A forgalmi modellezés eszközei, módszerei, szintjei Kózel Miklós St.
Tehergépjármű parkolás a hazai gyorsforgalmi úthálózaton Sándor Zsolt zsolt.sandor@mail.bme.hu
 Tehergépjármű parkolás a hazai gyorsforgalmi úthálózaton Sándor Zsolt zsolt.sandor@mail.bme.hu Budapesti Műszaki és Gazdaságtudományi Egyetem Közlekedésmérnöki és Járműmérnöki Kar Közlekedésüzemi és Közlekedésgazdasági
Tehergépjármű parkolás a hazai gyorsforgalmi úthálózaton Sándor Zsolt zsolt.sandor@mail.bme.hu Budapesti Műszaki és Gazdaságtudományi Egyetem Közlekedésmérnöki és Járműmérnöki Kar Közlekedésüzemi és Közlekedésgazdasági
Megoldások a tehergépjárműpihenők parkolóhely előrejelző rendszereire
 Megoldások a tehergépjárműpihenők parkolóhely előrejelző rendszereire Sándor Zsolt zsolt.sandor@mail.bme.hu Budapesti Műszaki és Gazdaságtudományi Egyetem Közlekedésmérnöki és Járműmérnöki Kar Közlekedésüzemi
Megoldások a tehergépjárműpihenők parkolóhely előrejelző rendszereire Sándor Zsolt zsolt.sandor@mail.bme.hu Budapesti Műszaki és Gazdaságtudományi Egyetem Közlekedésmérnöki és Járműmérnöki Kar Közlekedésüzemi
Közúti közlekedési és jármű modellek
 Közúti közlekedési és jármű modellek A KÖZÚTI KÖZLEKEDÉS MODELLEZÉSE CSOMÓPONTOK ÉS FORGALMI FOLYAMATOK 2013.11.26. Közlekedési automatika 2013 2 Csomópontok a megállások száma és/vagy a várakozási idők
Közúti közlekedési és jármű modellek A KÖZÚTI KÖZLEKEDÉS MODELLEZÉSE CSOMÓPONTOK ÉS FORGALMI FOLYAMATOK 2013.11.26. Közlekedési automatika 2013 2 Csomópontok a megállások száma és/vagy a várakozási idők
Budapesti Műszaki és Gazdaságtudományi Egyetem Villamosmérnöki és Informatikai Kar. Budapesti Műszaki és Gazdaságtudományi Egyetem
 Budapesti Műszaki és Gazdaságtudományi Egyetem Villamosmérnöki és Informatikai Kar Budapesti Műszaki és Gazdaságtudományi Egyetem Péceli Gábor, Méréstechnika és Információs Rendszerek Tanszék 1 A Budapesti
Budapesti Műszaki és Gazdaságtudományi Egyetem Villamosmérnöki és Informatikai Kar Budapesti Műszaki és Gazdaságtudományi Egyetem Péceli Gábor, Méréstechnika és Információs Rendszerek Tanszék 1 A Budapesti
Nagyméretű közúti közlekedési hálózatok analízise, 3D vizualizációja
 Nagyméretű közúti közlekedési hálózatok analízise, 3D vizualizációja Fazekas Sándor Témavezető: dr. Péter Tamás Közlekedés és járműirányítás workshop BME 2011 ISBN 978-963-420-975-1 Köszönet nyilvánítás
Nagyméretű közúti közlekedési hálózatok analízise, 3D vizualizációja Fazekas Sándor Témavezető: dr. Péter Tamás Közlekedés és járműirányítás workshop BME 2011 ISBN 978-963-420-975-1 Köszönet nyilvánítás
Villamosmérnöki és Informatikai Kar. A Budapesti Műszaki és Gazdaságtudományi Egyetem (BME) számokban
 számokban") Budapesti Műszaki és Gazdaságtudományi Egyetem Budapesti Műszaki és Gazdaságtudományi Egyetem Péceli Gábor, Méréstechnika és Információs Rendszerek Tanszék 1 Egyetem (BME) számokban 1782 Institutum Geometricum
Budapesti Műszaki és Gazdaságtudományi Egyetem Budapesti Műszaki és Gazdaságtudományi Egyetem Péceli Gábor, Méréstechnika és Információs Rendszerek Tanszék 1 Egyetem (BME) számokban 1782 Institutum Geometricum
ITS fejlesztések az állami gyorsforgalmi hálózaton
 ITS fejlesztések az állami gyorsforgalmi hálózaton Nagy Ádám forgalomszabályozási mérnök ÁAK Zrt. 2013.06.26. ITS alkalmazása a stratégiai célok elérése érdekében Közlekedésbiztonság növelése Forgalom
ITS fejlesztések az állami gyorsforgalmi hálózaton Nagy Ádám forgalomszabályozási mérnök ÁAK Zrt. 2013.06.26. ITS alkalmazása a stratégiai célok elérése érdekében Közlekedésbiztonság növelése Forgalom
A city-logisztika fontossága és egyes kérdései. BESTUFS II szeminárium, február 11. Dr. Monigl János. Egyetemi magántanár. TRANSMAN Kft.
 A city-logisztika fontossága és egyes kérdései BESTUFS II szeminárium, 2008. február 11. Dr. Monigl János Egyetemi magántanár TRANSMAN Kft. www.transman.hu / transman@transman.hu 2008.02.15. 2008.02.15.
A city-logisztika fontossága és egyes kérdései BESTUFS II szeminárium, 2008. február 11. Dr. Monigl János Egyetemi magántanár TRANSMAN Kft. www.transman.hu / transman@transman.hu 2008.02.15. 2008.02.15.
TÉRINFORMATIKA ÉS INTELLIGENS KÖZLEKEDÉSI RENDSZEREK FEJLESZTÉSE A FŐVÁROS KÖZÚTHÁLÓZATÁN
 1 TÉRINFORMATIKA ÉS INTELLIGENS KÖZLEKEDÉSI RENDSZEREK FEJLESZTÉSE A FŐVÁROS KÖZÚTHÁLÓZATÁN Dr. Almássy Kornél BKK Közút Zrt. OKOS JÖVŐ KONFERENCIA / SMART FUTURE FORUM - GYŐR 2015. október 1-2. KARESZ
1 TÉRINFORMATIKA ÉS INTELLIGENS KÖZLEKEDÉSI RENDSZEREK FEJLESZTÉSE A FŐVÁROS KÖZÚTHÁLÓZATÁN Dr. Almássy Kornél BKK Közút Zrt. OKOS JÖVŐ KONFERENCIA / SMART FUTURE FORUM - GYŐR 2015. október 1-2. KARESZ
Mozgásmodellezés. Lukovszki Csaba. Navigációs és helyalapú szolgáltatások és alkalmazások (VITMMA07)
") TÁVKÖZLÉSI ÉS MÉDIAINFORMATIKAI TANSZÉK () BUDAPESTI MŰSZAKI ÉS GAZDASÁGTUDOMÁNYI EGYETEM (BME) Mozgásmodellezés Lukovszki Csaba Áttekintés» Probléma felvázolása» Szabadsági fokok» Diszkretizált» Hibát
TÁVKÖZLÉSI ÉS MÉDIAINFORMATIKAI TANSZÉK () BUDAPESTI MŰSZAKI ÉS GAZDASÁGTUDOMÁNYI EGYETEM (BME) Mozgásmodellezés Lukovszki Csaba Áttekintés» Probléma felvázolása» Szabadsági fokok» Diszkretizált» Hibát
Dinamikus modellek szerkezete, SDG modellek
 Diagnosztika - 3. p. 1/2 Modell Alapú Diagnosztika Diszkrét Módszerekkel Dinamikus modellek szerkezete, SDG modellek Hangos Katalin PE Villamosmérnöki és Információs Rendszerek Tanszék Diagnosztika - 3.
Diagnosztika - 3. p. 1/2 Modell Alapú Diagnosztika Diszkrét Módszerekkel Dinamikus modellek szerkezete, SDG modellek Hangos Katalin PE Villamosmérnöki és Információs Rendszerek Tanszék Diagnosztika - 3.
MINTA Írásbeli Záróvizsga Mechatronikai mérnök MSc. Debrecen,
 MINTA Írásbeli Záróvizsga Mechatronikai mérnök MSc Debrecen, 2017. 01. 03. Név: Neptun kód: Megjegyzések: A feladatok megoldásánál használja a géprajz szabályait, valamint a szabványos áramköri elemeket.
MINTA Írásbeli Záróvizsga Mechatronikai mérnök MSc Debrecen, 2017. 01. 03. Név: Neptun kód: Megjegyzések: A feladatok megoldásánál használja a géprajz szabályait, valamint a szabványos áramköri elemeket.
SZERVEZETI ÉS MŰKÖDÉSI SZABÁLYZAT KÖZLEKEDÉS- ÉS JÁRMŰIRÁNYÍTÁSI TANSZÉK. Budapest, 2013.
 SZERVEZETI ÉS MŰKÖDÉSI SZABÁLYZAT KÖZLEKEDÉS- ÉS JÁRMŰIRÁNYÍTÁSI TANSZÉK Budapest, 2013. Szervezeti és Működési Szabályzat 1.. 1) A tanszék neve: Budapesti Műszaki és Gazdaságtudományi Egyetem Közlekedésmérnöki
SZERVEZETI ÉS MŰKÖDÉSI SZABÁLYZAT KÖZLEKEDÉS- ÉS JÁRMŰIRÁNYÍTÁSI TANSZÉK Budapest, 2013. Szervezeti és Működési Szabályzat 1.. 1) A tanszék neve: Budapesti Műszaki és Gazdaságtudományi Egyetem Közlekedésmérnöki
Intelligens beágyazott rendszer üvegházak irányításában
 P5-T6: Algoritmustervezési környezet kidolgozása intelligens autonóm rendszerekhez Intelligens beágyazott rendszer üvegházak irányításában Eredics Péter, Dobrowiecki P. Tadeusz, BME-MIT 1 Üvegházak Az
P5-T6: Algoritmustervezési környezet kidolgozása intelligens autonóm rendszerekhez Intelligens beágyazott rendszer üvegházak irányításában Eredics Péter, Dobrowiecki P. Tadeusz, BME-MIT 1 Üvegházak Az
BME IPAR 4.0 TECHNOLÓGIAI KÖZPONT. Kovács László
 BME IPAR 4.0 TECHNOLÓGIAI KÖZPONT Kovács László RÓLUNK - BME Építőmérnöki Kar (ÉMK) - 1782 Gépészmérnöki Kar (GPK) - 1871 Építészmérnöki Kar (ÉPK) - 1873 Vegyészmérnöki és Biomérnöki Kar (VBK) - 1873 Villamosmérnöki
BME IPAR 4.0 TECHNOLÓGIAI KÖZPONT Kovács László RÓLUNK - BME Építőmérnöki Kar (ÉMK) - 1782 Gépészmérnöki Kar (GPK) - 1871 Építészmérnöki Kar (ÉPK) - 1873 Vegyészmérnöki és Biomérnöki Kar (VBK) - 1873 Villamosmérnöki
Cégismertető 2008. Közlekedés modellezése felsőfokon... 1023. Budapest, Harcsa utca 2.
 Közlekedés modellezése felsőfokon... Cégismertető 2008. KVANTITÁS-CONSULTING KFT 1023. Budapest, Harcsa utca 2. www.kvantitas.hu Telefonszám:336 10 48 Faxszám: 336 10 49 E-mail: drmakula@kvantitas.hu Cégünk,
Közlekedés modellezése felsőfokon... Cégismertető 2008. KVANTITÁS-CONSULTING KFT 1023. Budapest, Harcsa utca 2. www.kvantitas.hu Telefonszám:336 10 48 Faxszám: 336 10 49 E-mail: drmakula@kvantitas.hu Cégünk,
A közforgalmú személyközlekedés időbeli tervezése
 A közforgalmú személyközlekedés időbeli tervezése igény-kapacitás összerendelése (tervezés, lebonyolítás) - igények részletes jellemzői (térbeliség, időbeliség, utas-összetétel, stb.), mértékadó utasszám
A közforgalmú személyközlekedés időbeli tervezése igény-kapacitás összerendelése (tervezés, lebonyolítás) - igények részletes jellemzői (térbeliség, időbeliség, utas-összetétel, stb.), mértékadó utasszám
Irányítástechnika GÁSPÁR PÉTER. Prof. BOKOR JÓZSEF útmutatásai alapján
 Irányítástechnika GÁSPÁR PÉTER Prof. BOKOR JÓZSEF útmutatásai alapján Irányítástechnika rendszerek Irányítástechnika Budapest, 2008 2 Az előadás felépítése 1. 2. 3. 4. Irányítástechnika Budapest, 2008
Irányítástechnika GÁSPÁR PÉTER Prof. BOKOR JÓZSEF útmutatásai alapján Irányítástechnika rendszerek Irányítástechnika Budapest, 2008 2 Az előadás felépítése 1. 2. 3. 4. Irányítástechnika Budapest, 2008
Irányításelmélet és technika II.
 Irányításelmélet és technika II. Legkisebb négyzetek módszere Magyar Attila Pannon Egyetem Műszaki Informatikai Kar Villamosmérnöki és Információs Rendszerek Tanszék amagyar@almos.vein.hu 200 november
Irányításelmélet és technika II. Legkisebb négyzetek módszere Magyar Attila Pannon Egyetem Műszaki Informatikai Kar Villamosmérnöki és Információs Rendszerek Tanszék amagyar@almos.vein.hu 200 november
CROCODILE 2.0_HU projekt
 CROCODILE 2.0_HU projekt Cooperation of Road Operators for COnsistent and Dynamic Information LEvels Rónai Gergely osztályvezető Csillik Ádám fejlesztési mérnök ITS Hungary évzáró rendezvény- 2017. december
CROCODILE 2.0_HU projekt Cooperation of Road Operators for COnsistent and Dynamic Information LEvels Rónai Gergely osztályvezető Csillik Ádám fejlesztési mérnök ITS Hungary évzáró rendezvény- 2017. december
AZ AUTONÓM KÖZÚTI JÁRMŰVEK TESZTELÉSI ÉS VALIDÁLÁSI KIHÍVÁSAI
 AZ AUTONÓM KÖZÚTI JÁRMŰVEK TESZTELÉSI ÉS VALIDÁLÁSI KIHÍVÁSAI Dr. SZALAY, Zsolt HAVEit demonstrációs jármű 2 Speciális kihívások Jogi felelősség Kié a felelősség, illetve hogyan lehet a járművekbe felelősséget
AZ AUTONÓM KÖZÚTI JÁRMŰVEK TESZTELÉSI ÉS VALIDÁLÁSI KIHÍVÁSAI Dr. SZALAY, Zsolt HAVEit demonstrációs jármű 2 Speciális kihívások Jogi felelősség Kié a felelősség, illetve hogyan lehet a járművekbe felelősséget
Számítógép-rendszerek fontos jellemzői (Hardver és Szoftver):
:") B Motiváció B Motiváció Számítógép-rendszerek fontos jellemzői (Hardver és Szoftver): Helyesség Felhasználóbarátság Hatékonyság Modern számítógép-rendszerek: Egyértelmű hatékonyság (például hálózati hatékonyság)
B Motiváció B Motiváció Számítógép-rendszerek fontos jellemzői (Hardver és Szoftver): Helyesség Felhasználóbarátság Hatékonyság Modern számítógép-rendszerek: Egyértelmű hatékonyság (például hálózati hatékonyság)
Autóbusz előnyben részesítésének lehetőségei Pécsett
 Budapesti Műszaki és Gazdaságtudományi Egyetem Közlekedésmérnöki és Járműmérnöki Kar Közlekedés- és Járműirányítási Tanszék Autóbusz előnyben részesítésének lehetőségei Pécsett Készítette: Pásztor Petronella
Budapesti Műszaki és Gazdaságtudományi Egyetem Közlekedésmérnöki és Járműmérnöki Kar Közlekedés- és Járműirányítási Tanszék Autóbusz előnyben részesítésének lehetőségei Pécsett Készítette: Pásztor Petronella
A felelősség határai a tudásalapú társadalomban a közlekedés példáján. Palkovics László BME
 A felelősség határai a tudásalapú társadalomban a közlekedés példáján Palkovics László BME Az autonóm közúti közlekedési rendszerek (jármű + közlekedési környezet) fejlődésének indokai a humán vezető képességei
A felelősség határai a tudásalapú társadalomban a közlekedés példáján Palkovics László BME Az autonóm közúti közlekedési rendszerek (jármű + közlekedési környezet) fejlődésének indokai a humán vezető képességei
BUDAPESTI MŰSZAKI ÉS GAZDASÁGTUDOMÁNYI EGYETEM KÖZLEKEDÉSMÉRNÖKI ÉS JÁRMŰMÉRNÖKI KAR LOGISZTIKAI MÉRNÖKI. MESTER (MSc) SZAK
 SZAK") BUDAPESTI MŰSZAKI ÉS GAZDASÁGTUDOMÁNYI EGYETEM KÖZLEKEDÉSMÉRNÖKI ÉS JÁRMŰMÉRNÖKI KAR LOGISZTIKAI MÉRNÖKI MESTER (MSc) SZAK Budapest 2012 A felsőoktatási intézmény neve, címe: BUDAPESTI MŰSZAKI ÉS GAZDASÁGTUDOMÁNYI
BUDAPESTI MŰSZAKI ÉS GAZDASÁGTUDOMÁNYI EGYETEM KÖZLEKEDÉSMÉRNÖKI ÉS JÁRMŰMÉRNÖKI KAR LOGISZTIKAI MÉRNÖKI MESTER (MSc) SZAK Budapest 2012 A felsőoktatási intézmény neve, címe: BUDAPESTI MŰSZAKI ÉS GAZDASÁGTUDOMÁNYI
Forgalomfüggő vezérlés videodetektorokkal Pécs, 6. sz. főút - Lánc utca csomópont
 Forgalomfüggő vezérlés videodetektorokkal Pécs, 6. sz. főút - Lánc utca csomópont rövid összefoglaló A videodetektorok előnyei Megbízható: A képfeldolgozás miatt működése független az útpálya állapotától
Forgalomfüggő vezérlés videodetektorokkal Pécs, 6. sz. főút - Lánc utca csomópont rövid összefoglaló A videodetektorok előnyei Megbízható: A képfeldolgozás miatt működése független az útpálya állapotától
BUDAPESTI MŰSZAKI ÉS GAZDASÁGTUDOMÁNYI EGYETEM KÖZLEKEDÉSÜZEMI ÉS KÖZLEKEDÉSGAZDASÁGI TANSZÉK
 BUDAPESTI MŰSZAKI ÉS GAZDASÁGTUDOMÁNYI EGYETEM KÖZLEKEDÉSÜZEMI ÉS KÖZLEKEDÉSGAZDASÁGI TANSZÉK TDK TÉMAJAVASLATOK KÖZÚTI FORGALOMTECHNIKA ÉS KÖZLEKEDÉSBIZTONSÁG: 1. Kerékpáros forgalom útkereszteződésekben
BUDAPESTI MŰSZAKI ÉS GAZDASÁGTUDOMÁNYI EGYETEM KÖZLEKEDÉSÜZEMI ÉS KÖZLEKEDÉSGAZDASÁGI TANSZÉK TDK TÉMAJAVASLATOK KÖZÚTI FORGALOMTECHNIKA ÉS KÖZLEKEDÉSBIZTONSÁG: 1. Kerékpáros forgalom útkereszteződésekben
Rónai Gergely. fejlesztési főmérnök BKK Közút Zrt.
 ITS fejlesztés Budapesten Rónai Gergely fejlesztési főmérnök BKK Közút Zrt. A fővárosi ITS kezdetei Nemzeti Közlekedési Napok 2013 - ITS fejlesztés Budapesten 2 ITS fejlesztések szervezeti háttere Budapest
ITS fejlesztés Budapesten Rónai Gergely fejlesztési főmérnök BKK Közút Zrt. A fővárosi ITS kezdetei Nemzeti Közlekedési Napok 2013 - ITS fejlesztés Budapesten 2 ITS fejlesztések szervezeti háttere Budapest
Az EasyWayII projekt
 Az EasyWayII projekt fővárosi eredményei Varga Attila forgalomtechnikai igazgató BKK Közút Zrt. Nemzeti Fejlesztési Minisztérium ITS Hungary Egyesület EasyWay Workshop Az EWII projekt keretei Előkészítési
Az EasyWayII projekt fővárosi eredményei Varga Attila forgalomtechnikai igazgató BKK Közút Zrt. Nemzeti Fejlesztési Minisztérium ITS Hungary Egyesület EasyWay Workshop Az EWII projekt keretei Előkészítési
Műegyetemi megoldások
 Műegyetemi megoldások A BME és az ipar együttműködése Intelligens technológiák 1 Műegyetemi megoldások A BME és az ipar együttműködése Intelligens technológiák Kollár László tudományos és innovációs rektorhelyettes
Műegyetemi megoldások A BME és az ipar együttműködése Intelligens technológiák 1 Műegyetemi megoldások A BME és az ipar együttműködése Intelligens technológiák Kollár László tudományos és innovációs rektorhelyettes
Quadkopter szimulációja LabVIEW környezetben Simulation of a Quadcopter with LabVIEW
 Quadkopter szimulációja LabVIEW környezetben Simulation of a Quadcopter with LabVIEW T. KISS 1 P. T. SZEMES 2 1University of Debrecen, kiss.tamas93@gmail.com 2University of Debrecen, szemespeter@eng.unideb.hu
Quadkopter szimulációja LabVIEW környezetben Simulation of a Quadcopter with LabVIEW T. KISS 1 P. T. SZEMES 2 1University of Debrecen, kiss.tamas93@gmail.com 2University of Debrecen, szemespeter@eng.unideb.hu
Optimális mérési elrendezés hidraulikus hálózatokon
 Optimális mérési elrendezés hidraulikus hálózatokon MaSzeSz Juniuor Szimpózium Wéber Richárd PhD hallgató, III. félév BME, GPK, Hidrodinamikai Rendszerek Tanszék Budapest, 2018, egyetemi docens Tartalom
Optimális mérési elrendezés hidraulikus hálózatokon MaSzeSz Juniuor Szimpózium Wéber Richárd PhD hallgató, III. félév BME, GPK, Hidrodinamikai Rendszerek Tanszék Budapest, 2018, egyetemi docens Tartalom
11. Intelligens rendszerek
 SZÉCHENYI ISTVÁN EGYETEM MŰSZAKI TUDOMÁNYI KAR KÖZLEKEDÉSÉPÍTÉSI TANSZÉK KÖZÚTI FORGALOMTECHNIKA 1. Tantárgykód: NGB_ET009_1 11. Intelligens rendszerek Dr. Kálmán László egyetemi adjunktus Győr, 2014.
SZÉCHENYI ISTVÁN EGYETEM MŰSZAKI TUDOMÁNYI KAR KÖZLEKEDÉSÉPÍTÉSI TANSZÉK KÖZÚTI FORGALOMTECHNIKA 1. Tantárgykód: NGB_ET009_1 11. Intelligens rendszerek Dr. Kálmán László egyetemi adjunktus Győr, 2014.
50 ÉV ÁTTEKINTÉSE. Dr. Tóth János BME Közlekedésmérnöki és Járműmérnöki Kar. Közlekedésüzemi és Közlekedésgazdasági Tanszék
 50 ÉV ÁTTEKINTÉSE Dr. Tóth János 2018.10.16. BME Közlekedésmérnöki és Járműmérnöki Kar Tartalom KTE fejlődése Közlekedéspolitika változásai BKV történeti áttekintése Közlekedésmérnökképzés Egyéb közlekedési,
50 ÉV ÁTTEKINTÉSE Dr. Tóth János 2018.10.16. BME Közlekedésmérnöki és Járműmérnöki Kar Tartalom KTE fejlődése Közlekedéspolitika változásai BKV történeti áttekintése Közlekedésmérnökképzés Egyéb közlekedési,
Házi feladat ACTROS JAVA programozás
 Házi feladat ACTROS JAVA programozás I. Adja meg az eredeti forgalomtechnikai kódban megtalálható közbenső idő mátrixot! II. Rajzolja fel az eredeti forgalomtechnikai kódban megtalálható 1. fix program
Házi feladat ACTROS JAVA programozás I. Adja meg az eredeti forgalomtechnikai kódban megtalálható közbenső idő mátrixot! II. Rajzolja fel az eredeti forgalomtechnikai kódban megtalálható 1. fix program
Közúti közlekedési automatika
 Budapesti Műszaki és Gazdaságtudományi Egyetem Közlekedésautomatikai Tanszék Közúti közlekedési automatika 2008. május 5. Második kiadás Összeállították: Tettamanti Tamás PhD. hallgató Luspay Tamás tudományos
Budapesti Műszaki és Gazdaságtudományi Egyetem Közlekedésautomatikai Tanszék Közúti közlekedési automatika 2008. május 5. Második kiadás Összeállították: Tettamanti Tamás PhD. hallgató Luspay Tamás tudományos
Intermodális csomópontok információs rendszerei
 Intermodális csomópontok információs rendszerei felmerülő szükséglet anyagi, szellemi javak szolgáltatások iránt - térbeliség - (korábbi ismeretei) helyváltoztatás tervezési-döntési folyamata szubjektív
Intermodális csomópontok információs rendszerei felmerülő szükséglet anyagi, szellemi javak szolgáltatások iránt - térbeliség - (korábbi ismeretei) helyváltoztatás tervezési-döntési folyamata szubjektív
MLBKT OKTATÓI TAGOZAT Logisztikai szakirányú BSc képzés a BME-n
 MLBKT OKTATÓI TAGOZAT Logisztikai szakirányú BSc képzés a BME-n Dr. Bóna Krisztián adjunktus TARTALOMJEGYZÉK A szervezetről A képzési struktúráról 3. 5. A tárgyakról A jövő BSc-je 24. 8. 1 A SZERVEZETRŐL
MLBKT OKTATÓI TAGOZAT Logisztikai szakirányú BSc képzés a BME-n Dr. Bóna Krisztián adjunktus TARTALOMJEGYZÉK A szervezetről A képzési struktúráról 3. 5. A tárgyakról A jövő BSc-je 24. 8. 1 A SZERVEZETRŐL
Autópálya forgalomszabályozás felhajtókorlátozás és változtatható sebességkorlátozás összehangolásával és fejlesztési lehetőségei
 Autópálya forgalomszabályozás felhajtókorlátozás és változtatható sebességkorlátozás összehangolásával és fejlesztési lehetőségei Tettamanti Tamás, Varga István, Bokor József BME Közlekedésautomatikai
Autópálya forgalomszabályozás felhajtókorlátozás és változtatható sebességkorlátozás összehangolásával és fejlesztési lehetőségei Tettamanti Tamás, Varga István, Bokor József BME Közlekedésautomatikai
A személyközlekedés minősítési rendszere
 A személyközlekedés minősítési rendszere személyközlekedés tervezése és működtetése során alapvető jelentőségűek a i jellemzők bonus-malus rendszer működtetésére a megrendelési szerződések szerint Minőség:
A személyközlekedés minősítési rendszere személyközlekedés tervezése és működtetése során alapvető jelentőségűek a i jellemzők bonus-malus rendszer működtetésére a megrendelési szerződések szerint Minőség:
A FORGALMI MODELLEZÉS GYAKORLATI ALKALMAZÁSA A TERVEZŐ FÁJDALMAI. Közlekedéstudományi Egyesület Közös dolgaink január 29.
 A FORGALMI MODELLEZÉS GYAKORLATI ALKALMAZÁSA A TERVEZŐ FÁJDALMAI Közlekedéstudományi Egyesület Közös dolgaink 2019. január 29. MODELLEZÉSI FELADAT ELEMEI A) Megfelelő szoftvercsomag B) A közlekedési rendszer
A FORGALMI MODELLEZÉS GYAKORLATI ALKALMAZÁSA A TERVEZŐ FÁJDALMAI Közlekedéstudományi Egyesület Közös dolgaink 2019. január 29. MODELLEZÉSI FELADAT ELEMEI A) Megfelelő szoftvercsomag B) A közlekedési rendszer
A VÁROSELLÁTÁS KOMPLEX LOGISZTIKAI PROBLÉMÁI CITY LOGISZTIKA
 A VÁROSELLÁTÁS KOMPLEX LOGISZTIKAI PROBLÉMÁI CITY LOGISZTIKA MKTLSZ workshop Kalocsa, 2011.05.18. Bakos András PhD hallgató Foltin Szilvia hallgató Tulajdonképpen mi is az a city-logisztika? Hol hibáztunk
A VÁROSELLÁTÁS KOMPLEX LOGISZTIKAI PROBLÉMÁI CITY LOGISZTIKA MKTLSZ workshop Kalocsa, 2011.05.18. Bakos András PhD hallgató Foltin Szilvia hallgató Tulajdonképpen mi is az a city-logisztika? Hol hibáztunk
Törökbálinti útról nyitandó, Budapest felé irányuló autópálya kapcsolat
 ~. MÚEGYETEM 17 82 BME Út és Vasútépítési Tanszék Törökbálinti útról nyitandó, Budapest felé irányuló autópálya kapcsolat '" 1..,/ I Készült az Érd és Térsége Szcnnyvízclvczctési- és Szennyvíztisztítási
~. MÚEGYETEM 17 82 BME Út és Vasútépítési Tanszék Törökbálinti útról nyitandó, Budapest felé irányuló autópálya kapcsolat '" 1..,/ I Készült az Érd és Térsége Szcnnyvízclvczctési- és Szennyvíztisztítási
NGB_IN040_1 SZIMULÁCIÓS TECHNIKÁK dr. Pozna Claudio Radu, Horváth Ernő
 SZÉCHENYI ISTVÁN EGYETEM Műszaki Tudományi Kar Informatika Tanszék BSC FOKOZATÚ MÉRNÖK INFORMATIKUS SZAK NGB_IN040_1 SZIMULÁCIÓS TECHNIKÁK dr. Pozna Claudio Radu, Horváth Ernő Fejlesztői dokumentáció GROUP#6
SZÉCHENYI ISTVÁN EGYETEM Műszaki Tudományi Kar Informatika Tanszék BSC FOKOZATÚ MÉRNÖK INFORMATIKUS SZAK NGB_IN040_1 SZIMULÁCIÓS TECHNIKÁK dr. Pozna Claudio Radu, Horváth Ernő Fejlesztői dokumentáció GROUP#6
Valós idejű kiberfizikai rendszerek 5G infrastruktúrában
 Valós idejű kiberfizikai rendszerek 5G infrastruktúrában dr. Kovácsházy Tamás BME-MIT khazy@mit.bme.hu 1 Kiberfizikai rendszer (CPS, Cyber-Physical System) Egy olyan elosztott, kiterjedt informatikai és
Valós idejű kiberfizikai rendszerek 5G infrastruktúrában dr. Kovácsházy Tamás BME-MIT khazy@mit.bme.hu 1 Kiberfizikai rendszer (CPS, Cyber-Physical System) Egy olyan elosztott, kiterjedt informatikai és
Intelligens közlekedési rendszer alkalmazásokkal a közlekedésbiztonság javításáért
 Új évtized, új kihívások a közlekedésbiztonságban közúti közlekedésbiztonsági konferencia Intelligens közlekedési rendszer alkalmazásokkal a közlekedésbiztonság javításáért Szűcs Lajos elnök ITS Hungary
Új évtized, új kihívások a közlekedésbiztonságban közúti közlekedésbiztonsági konferencia Intelligens közlekedési rendszer alkalmazásokkal a közlekedésbiztonság javításáért Szűcs Lajos elnök ITS Hungary
IoT alapú mezőgazdasági adatgyűjtő prototípus fejlesztési tapasztalatok
 IoT alapú mezőgazdasági adatgyűjtő prototípus fejlesztési tapasztalatok 2016.05.19. Szilágyi Róbert Tóth Mihály Debreceni Egyetem Az IoT Eszközök és más fizikai objektumok elektronikával, vezérléssel,
IoT alapú mezőgazdasági adatgyűjtő prototípus fejlesztési tapasztalatok 2016.05.19. Szilágyi Róbert Tóth Mihály Debreceni Egyetem Az IoT Eszközök és más fizikai objektumok elektronikával, vezérléssel,
Miskolc Közlekedésfejlesztése
 1 Miskolc Közlekedésfejlesztése Készítette: Singlár Zsolt vezérigazgató A KTE Városi Közlekedési Tagozat XVI. Városi közlekedés aktuális kérdései konferencia Balatonfenyves 2016. Szeptember 8-9. Miskolc
1 Miskolc Közlekedésfejlesztése Készítette: Singlár Zsolt vezérigazgató A KTE Városi Közlekedési Tagozat XVI. Városi közlekedés aktuális kérdései konferencia Balatonfenyves 2016. Szeptember 8-9. Miskolc
Irányító és kommunikációs rendszerek III. Előadás 13
 Irányító és kommunikációs rendszerek III. Előadás 13 GSM-R Flottamenedzsment Mobil fizetési lehetőségek Parkolási díj Útdíj A GSM közlekedési felhasználása Valós idejű információs szolgáltatás Közlekedési
Irányító és kommunikációs rendszerek III. Előadás 13 GSM-R Flottamenedzsment Mobil fizetési lehetőségek Parkolási díj Útdíj A GSM közlekedési felhasználása Valós idejű információs szolgáltatás Közlekedési
Ha ismert (A,b,c T ), akkor
, akkor") Az eddigiekben feltételeztük, hogy a rendszer állapotát mérni tudjuk. Az állapot ismerete szükséges az állapot-visszacsatolt szabályzó tervezéséhez. Ha nem ismerjük az x(t) állapotvektort, akkor egy olyan
Az eddigiekben feltételeztük, hogy a rendszer állapotát mérni tudjuk. Az állapot ismerete szükséges az állapot-visszacsatolt szabályzó tervezéséhez. Ha nem ismerjük az x(t) állapotvektort, akkor egy olyan
Mobil Gamma-log berendezés hajtásláncának modellezése LOLIMOT használatával
 Mobil Gamma-log berendezés hajtásláncának modellezése LOLIMOT használatával Füvesi Viktor 1, Kovács Ernő 2, Jónap Károly 3, Vörös Csaba 4 1,4 tudományos s. munkatárs, 2 PhD, egyetemi docens, 3 PhD, tudományos
Mobil Gamma-log berendezés hajtásláncának modellezése LOLIMOT használatával Füvesi Viktor 1, Kovács Ernő 2, Jónap Károly 3, Vörös Csaba 4 1,4 tudományos s. munkatárs, 2 PhD, egyetemi docens, 3 PhD, tudományos
Magyar Közút ITS projektek 2020-ig
 Magyar Közút ITS projektek 2020-ig Verdes Máté ITS Hungary évzáró rendezvény Makadám Klub, 2017. december 18. A közeljövő kihívásai Változó felhasználói szokások, és igények Új kommunikációs csatornák,
Magyar Közút ITS projektek 2020-ig Verdes Máté ITS Hungary évzáró rendezvény Makadám Klub, 2017. december 18. A közeljövő kihívásai Változó felhasználói szokások, és igények Új kommunikációs csatornák,
Statisztikai módszerek a skálafüggetlen hálózatok
 Statisztikai módszerek a skálafüggetlen hálózatok vizsgálatára Gyenge Ádám1 1 Budapesti Műszaki és Gazdaságtudományi Egyetem Villamosmérnöki és Informatikai Kar Számítástudományi és Információelméleti
Statisztikai módszerek a skálafüggetlen hálózatok vizsgálatára Gyenge Ádám1 1 Budapesti Műszaki és Gazdaságtudományi Egyetem Villamosmérnöki és Informatikai Kar Számítástudományi és Információelméleti
A forgalomsűrűség és a követési távolság kapcsolata
 1 A forgalomsűrűség és a követési távolság kapcsolata 6 Az áramlatsűrűség (forgalomsűrűség) a követési távolsággal ad egyértelmű összefüggést: a sűrűség reciprok értéke a(z) (átlagos) követési távolság.
1 A forgalomsűrűség és a követési távolság kapcsolata 6 Az áramlatsűrűség (forgalomsűrűség) a követési távolsággal ad egyértelmű összefüggést: a sűrűség reciprok értéke a(z) (átlagos) követési távolság.
BUDAPESTI MŰSZAKI ÉS GAZDASÁGTUDOMÁNYI EGYETEM
 BUDAPESTI MŰSZAKI ÉS GAZDASÁGTUDOMÁNYI EGYETEM Előterjesztő neve és beosztása: Dr. Varga István dékán Szervezeti egység: Közlekedésmérnöki és Járműmérnöki Kar E L Ő T E R J E S Z T É S A Közlekedésmérnöki
BUDAPESTI MŰSZAKI ÉS GAZDASÁGTUDOMÁNYI EGYETEM Előterjesztő neve és beosztása: Dr. Varga István dékán Szervezeti egység: Közlekedésmérnöki és Járműmérnöki Kar E L Ő T E R J E S Z T É S A Közlekedésmérnöki
A Markovi forgalomanalízis legújabb eredményei és ezek alkalmazása a távközlő hálózatok teljesítményvizsgálatában
 A Markovi forgalomanalízis legújabb eredményei és ezek alkalmazása a távközlő hálózatok teljesítményvizsgálatában Horváth Gábor ghorvath@hit.bme.hu (Horváth András, Telek Miklós) - p. 1 Motiváció, problémafelvetés
A Markovi forgalomanalízis legújabb eredményei és ezek alkalmazása a távközlő hálózatok teljesítményvizsgálatában Horváth Gábor ghorvath@hit.bme.hu (Horváth András, Telek Miklós) - p. 1 Motiváció, problémafelvetés
Közúti folyamatok paramétereinek modell alapú becslése és forgalomfüggő irányítása
 Közúti folyamato paramétereine modell alapú becslése és forgalomfüggő irányítása PhD tézisfüzet Varga István ol. özleedésmérnö Témavezető: Prof. Dr. Boor József tanszévezető egyetemi tanár Budapesti Műszai
Közúti folyamato paramétereine modell alapú becslése és forgalomfüggő irányítása PhD tézisfüzet Varga István ol. özleedésmérnö Témavezető: Prof. Dr. Boor József tanszévezető egyetemi tanár Budapesti Műszai
Sensor Technologies Kft. TrafficNET (közlekedés-információs rendszer)
") TrafficNET (közlekedés-információs rendszer) 1 1. Projektcél A TrafficNet projekt célja olyan közlekedés-információs rendszer megvalósítása, amely Kecskeméten és vonzáskörzetében közlekedőket valósidejű
TrafficNET (közlekedés-információs rendszer) 1 1. Projektcél A TrafficNet projekt célja olyan közlekedés-információs rendszer megvalósítása, amely Kecskeméten és vonzáskörzetében közlekedőket valósidejű
Intelligens közlekedési rendszerek és szolgáltatások
 Intelligens közlekedési rendszerek és szolgáltatások Nemzeti Közlekedési Napok Siófok, 2013. november 7. Dr.- habil. Lindenbach Ágnes egyetemi tanár, PTE PMMIK Az ITS fogalma Az intelligens közlekedési
Intelligens közlekedési rendszerek és szolgáltatások Nemzeti Közlekedési Napok Siófok, 2013. november 7. Dr.- habil. Lindenbach Ágnes egyetemi tanár, PTE PMMIK Az ITS fogalma Az intelligens közlekedési
A közlekedés helyzete, jövője ma Magyarországon. Az EU városi közlekedéspolitikája ( Zöld Könyv 2007), összhang a hazai elképzelésekkel
, összhang a hazai elképzelésekkel") A közlekedés helyzete, jövője ma Magyarországon Az EU városi közlekedéspolitikája ( Zöld Könyv 2007), összhang a hazai elképzelésekkel Kerényi László Sándor Ügyosztályvezető Budapest Fővárosi Önkormányzat
A közlekedés helyzete, jövője ma Magyarországon Az EU városi közlekedéspolitikája ( Zöld Könyv 2007), összhang a hazai elképzelésekkel Kerényi László Sándor Ügyosztályvezető Budapest Fővárosi Önkormányzat
Hidraulikus hálózatok robusztusságának növelése
 Dr. Dulovics Dezső Junior Szimpózium 2018. Hidraulikus hálózatok robusztusságának növelése Előadó: Huzsvár Tamás MSc. Képzés, II. évfolyam Témavezető: Wéber Richárd, Dr. Hős Csaba www.hds.bme.hu Az előadás
Dr. Dulovics Dezső Junior Szimpózium 2018. Hidraulikus hálózatok robusztusságának növelése Előadó: Huzsvár Tamás MSc. Képzés, II. évfolyam Témavezető: Wéber Richárd, Dr. Hős Csaba www.hds.bme.hu Az előadás
Alkalmazott matematikus mesterszak MINTATANTERV
 Alkalmazott matematikus mesterszak MINTATANTERV Tartalom A MESTERSZAK SZERKEZETE... 1 A KÉPZÉSI PROGRAM ÁTTEKINTŐ SÉMÁJA... 1 NAPPALI TAGOZAT... 2 ESTI TAGOZAT... 6 0BA mesterszak szerkezete Alapozó ismeretek
Alkalmazott matematikus mesterszak MINTATANTERV Tartalom A MESTERSZAK SZERKEZETE... 1 A KÉPZÉSI PROGRAM ÁTTEKINTŐ SÉMÁJA... 1 NAPPALI TAGOZAT... 2 ESTI TAGOZAT... 6 0BA mesterszak szerkezete Alapozó ismeretek
A közösségi közlekedés elméleti megszervezésének alapjai
 Budapesti Műszaki és Gazdaságtudományi Egyetem Közlekedésmérnöki és Járműmérnöki Kar Közlekedésüzemi és Közlekedésgazdasági Tanszék A közösségi közlekedés elméleti megszervezésének alapjai Kövesné dr.
Budapesti Műszaki és Gazdaságtudományi Egyetem Közlekedésmérnöki és Járműmérnöki Kar Közlekedésüzemi és Közlekedésgazdasági Tanszék A közösségi közlekedés elméleti megszervezésének alapjai Kövesné dr.
AZ E-MOBILITÁS ÖSSZEFÜGGÉSEI, LEHETŐSÉGEI. Kisgyörgy Lajos BME Út és Vasútépítési Tanszék
 AZ E-MOBILITÁS ÖSSZEFÜGGÉSEI, LEHETŐSÉGEI Kisgyörgy Lajos BME Út és Vasútépítési Tanszék E-MOBILITÁS Elektromos és önvezető járművek Intelligens közlekedés Jármű jármű kommunikáció Jármű infrastruktúra
AZ E-MOBILITÁS ÖSSZEFÜGGÉSEI, LEHETŐSÉGEI Kisgyörgy Lajos BME Út és Vasútépítési Tanszék E-MOBILITÁS Elektromos és önvezető járművek Intelligens közlekedés Jármű jármű kommunikáció Jármű infrastruktúra
RADONPOTENCIÁL BECSLÉS MÓDSZEREINEK ÖSSZEHASONLÍTÁSA VASADON
 RADONPOTENCIÁL BECSLÉS MÓDSZEREINEK ÖSSZEHASONLÍTÁSA VASADON Készítette: Váradi Eszter, ELTE Környezettan Bsc Témavezető: Dr. Horváth Ákos, ELTE Atomfizikai Tanszék Budapest, 2013. Célkitűzés Vasad területének
RADONPOTENCIÁL BECSLÉS MÓDSZEREINEK ÖSSZEHASONLÍTÁSA VASADON Készítette: Váradi Eszter, ELTE Környezettan Bsc Témavezető: Dr. Horváth Ákos, ELTE Atomfizikai Tanszék Budapest, 2013. Célkitűzés Vasad területének