Navigáci. stervezés. Algoritmusok és alkalmazásaik. Osváth Róbert Sorbán Sámuel
|
|
|
- Ákos Budai
- 9 évvel ezelőtt
- Látták:
Átírás
1 Navigáci ció és s mozgástervez stervezés Algoritmusok és alkalmazásaik Osváth Róbert Sorbán Sámuel

2 Feladat Adottak: pálya (C), játékos, játékos ismerethalmaza, kezdőpont, célpont. Pálya szerkezete: akadályokkal (O) ellátott terület. Játékos ismerethalmaza: műveletek, melyeket a játékos végre tud hajtani. Cél: ismerve a játékos kezdeti pozicióját, eljutni egy kivánt végpontba. C O = F szabad tér, ahol a játékos szabadon mozoghat

3 Algoritmusok A megoldási módszerek: 1. Skeletonization. 2. Bounded-error planning. ( Fine motion ) 3. Online algoritmusok.
 3.")
4 1. Skeletonization Besűrítjük a pályát egy viszonylag egyszerűbb adatstruktúrába, csontvázba. Utak a csontvázon. Csontváz: véges csúcspontokkal rendelkező háló (gráf), gráfkereső algoritmusokat alkalmazhatunk utak keresésére a csontvázon. A szabad tér minimális leírása.

5 Skeletonization (2) Mozgás tervezés szempontjából helyes csontváz: 1. Ha S F szabad térnek egy csontváza, akkor S nek kell, hogy legyen egy(!) összefüggő része F minden különböző összefüggő régiójában. 2. F minden p pontjára, egy út p től a csontvázig könnyen megszerkeszthető kell legyen. (Skeletonization) Eljárások: 1. Láthatósági gráf. 2. Voronoi diagramm.

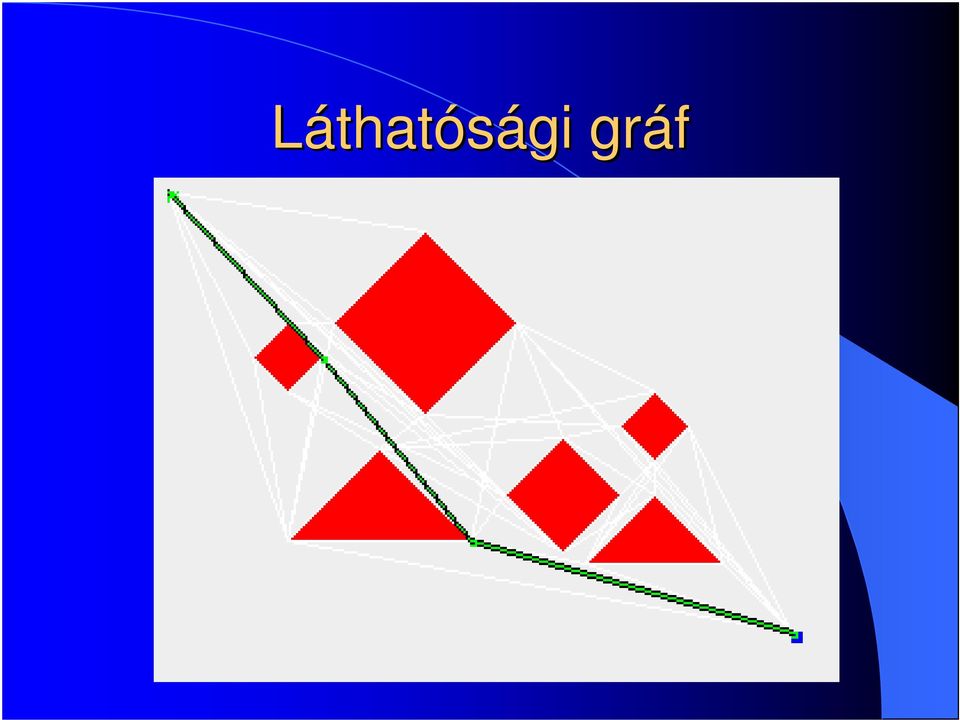
6 Skeletonization 1. LáthatL thatósági gráf Láthatósági gráf egy C tér esetében: egymással láthatósági viszonyban levő csúcspontokat összekötő élek. ( az akadályok határozzák meg ) A gráf alkalmas (teljes) tervezésre: tartalmazza az akadályok közti legrövidebb utakat.
 A gráf alkalmas (teljes)")
7 Láthatósági gráf
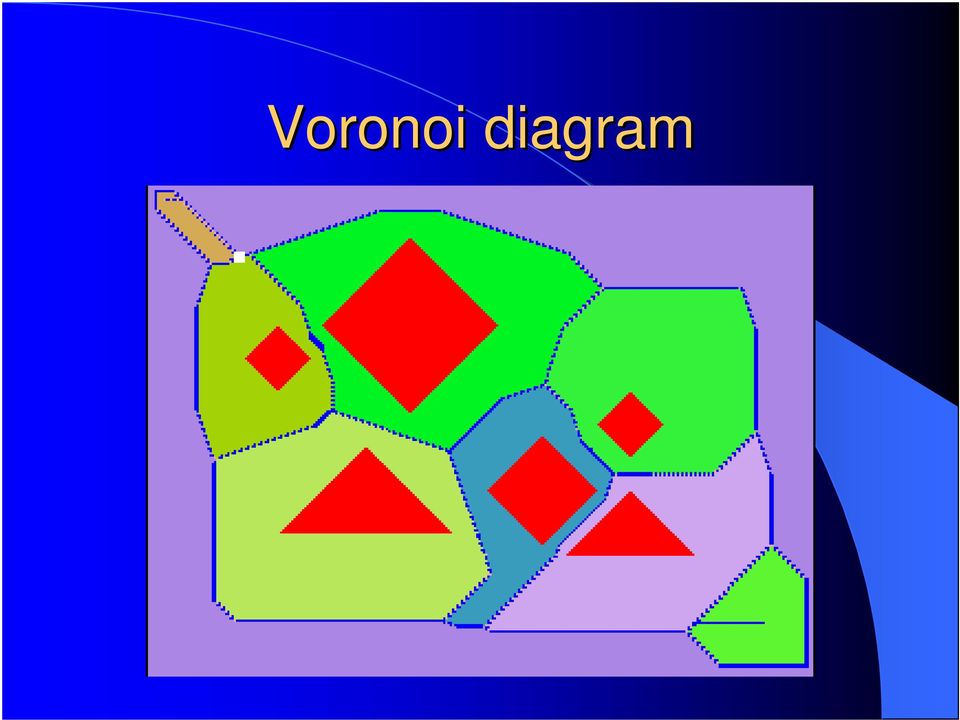
8 Skeletonization 2. Voronoi diagram F minden pontjára kiszámoljuk a d(p,n(p,o)) értéket, vagyis a ponthoz legközelebb eső akadálytól való távolságot. Ábrázoljuk ezen távolságokat mint a diagrammból kiemelkedő magasságokat. A terep magassága 0 közvetlenül az akadályok határánál és növekszik ha távolodunk tőlük. Két vagy több akadálytól egyenlő távolságra levő pontok kiemelkedő domborulatokat eredményeznek. Ezek alkotják a Voronoi diagramot. Teljes algoritmusok. Hátrány: legtöbb esetben nem a legrövidebb utat eredményezi.

9 Voronoi diagram
10 2. Bounded-error error planning (Fine-motion) Apró, pontos mozgások tervezése későbbi összeillesztésre. Terv: felügyelt mozgások sorozata. Felügyelt mozgás: 1. Mozgás parancs engedékeny mozgás ( csúszás, rugó...). 2. Leállási feltétel felügyelt mozgás vége.
. 2.")
11 Bounded-error error planning (2) Fine-motion tervező paraméterei: pálya leírása, leállási feltétel, engedékeny mozgás paraméterei. Az eredmény: több lépéses kondicionált terv vagy stratégia, mely garantáltan jó eredményhez vezet, feltéve ha létezik ilyen terv. A tervek a legrosszabb esetekhez igazodnak. Rendkivül magas összetettség.

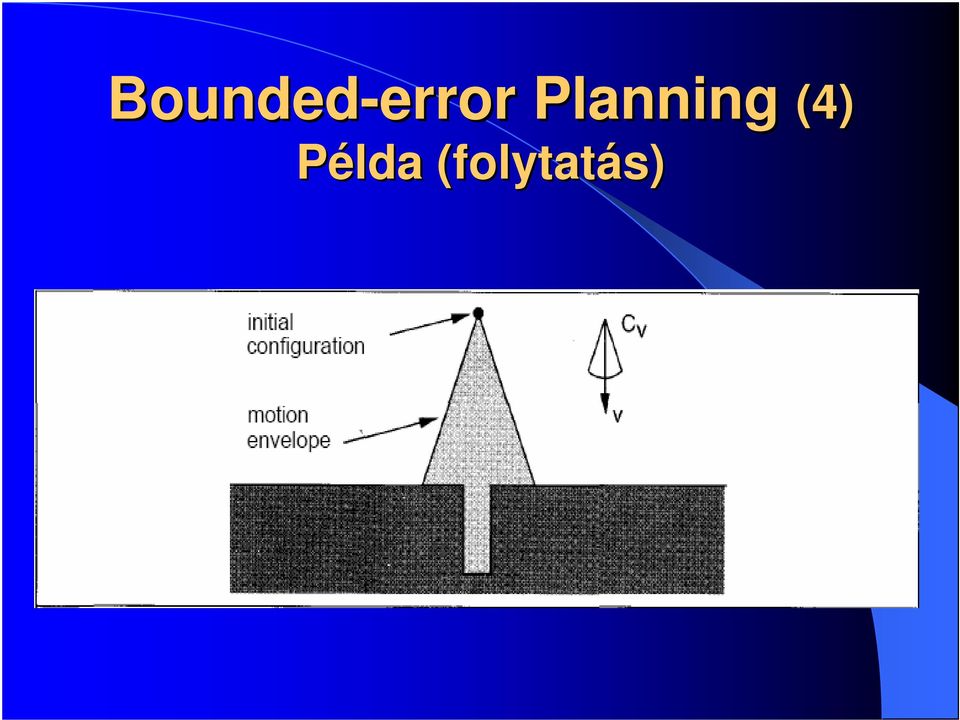
12 Bounded-error error planning (3) 2D környezet Példa Téglatest alakú cölöp behelyezése egy gödörbe Mozgás parancsok: állandó sebességek Leállási feltétel: felülettel való érintkezés Bizonytalanság modellezés: a megadott sebesség helyett a robot mozgását a megszerkesztett kúp írja le

13 Bounded-error error Planning (4) Példa (folytatás)
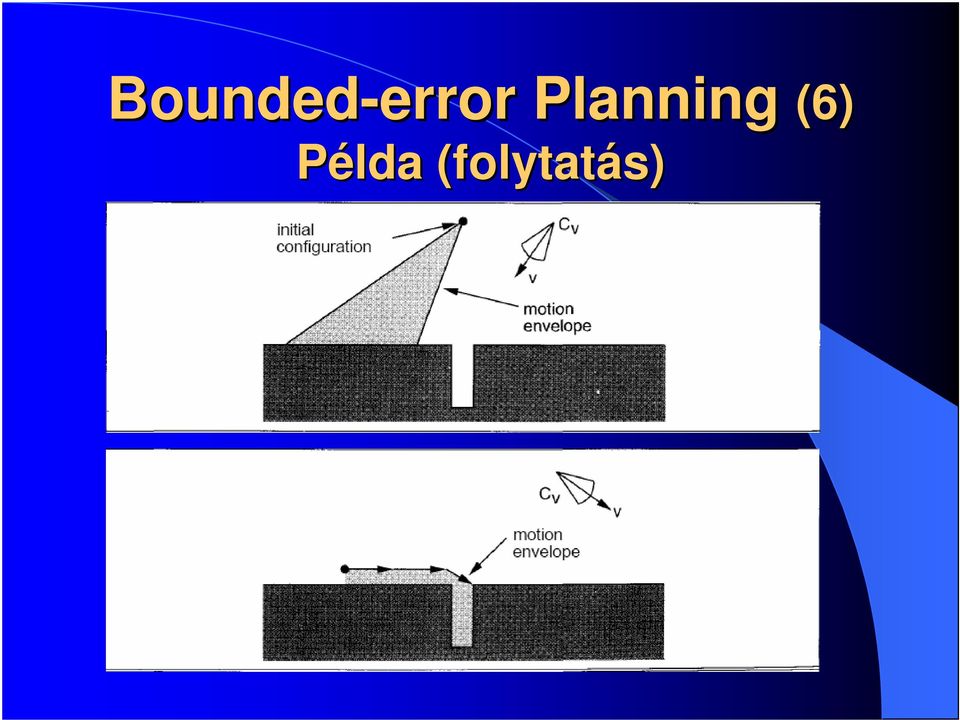
14 Bounded-error error Planning (5) Példa (folytatás) Más megközelítésben: Első lépésben a mozgás parancs és a leállási feltétel a robotot a gödör egyik felére landoltattja (bal) Következő lépésben pedig: vízszintes felülettel való érintkezéskor jobbra csúszik, a gödörhöz érve lefele csúszik, mivel a vertikális felületkere nézve a megadott sebességek lefele (jobbra) relatívak

15 Bounded-error error Planning (6) Példa (folytatás)
16 3. Online Algoritmusok A környezet többnyire vagy teljesen ismeretlen. Kondicionált terv létrehozása. Egyszerűségre kell törekednünk. Gyorsaság és teljesség. Szinte minden esetben hiányzik a legrövidebb út megtalálásának bizonyossága.

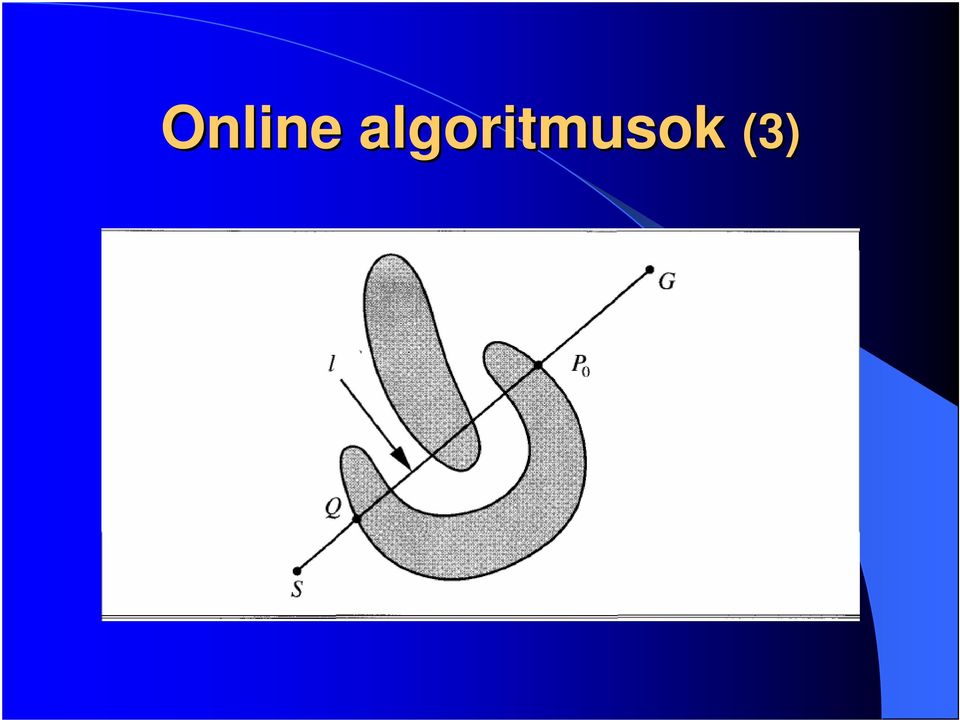
17 Stratégia: Online algoritmusok (2) 1. Egyenes vonal mentén mozgunk a cél felé (L). 2. Ha akadályhoz érkezünk megjegyezzük az aktuális pozíciónkat (Q). Megkerüljük az akadályt, óramutató járásával megegyező irányba, vissza Q- ig. Megjegyezzük azon pontokat és távolságokat, amelyek esetén átmentünk L-en. Ezek közül kiválasztjuk a célponthoz a legközelebbit (P 0 ) 3. Megkerüljük az akadályt Q-ból P 0 -ba. Ismerjük a legrövidebb utat P 0 ig. P 0 ból ismételjük a fenti lépéseket.

18 Online algoritmusok (3)
19 Összegzés Skeletonization: diszkrét gráfkeresési feladat. Láthatósági gráf: 2D ben gyors, optimális megoldás, Voronoi akadékos implementáció. Fine-motion: kondicionált terv. Komplexitás exponenciálisan nő a robot szabadságfokának és a terv lépései számának függvényében. Online algoritmusok: mozgás alatti döntés, nem garantált siker, környezettől függ.

20 Kiegészítés Láthatósági gráf algoritmusa Minden PolygonCsúcsból (A) Minden PolygonCsúcsba (B) Ha ( [A,B] szakasz nem metszi egyik Polygont sem) akkor Ha vége Minden vége Minden vége elek[a,b] = 1 Út választása: Dijkstra vagy egyéb gráfkereső algoritmussal.

21 Kiegészítés Online algoritmus Robot: 3 státusz változó (követ, keres, folytat) - Elindul a kezdőpontból követés státusszal (Követi a start és cél által meghatározott egyenest) - Mindig figyeli a környező pontokat hogy akadály-e (szenzor szimulálása) - Ha akadályt talál átlép a keresés státuszba - Minden környező pontra kiszámítja az ezt a pontot körülvevő akadálypontok összegét - Ahol az összeg minimális oda lép és folytatja a keresést - Megjegyzi a metszéspontokat, és amikor visszaért az akadály észlelési pontjába átlép a folytat státuszba ami megkeresi melyik az optimálisabb irány - Visszalép követési státuszba
22 Kiegészítés Voronoi roadmap - 2 térképet használunk, HATÁR jelzi a voronoi cellákat Elegendő számú lépésig végezd el Minden pontra Halmaz h = térkép[pont] szomszédjai Ha elemei(h) == 1 akkor térkép2[pont] = h.elem() Ha elemei(h) > 1 akkor térkép2[pont] = HATAR Minden vége térkép = térkép2 For vége - Miután a térkép megvan, egy Robotot indítunk el, ami az online robothoz hasonlóan keresi az utat, de kizárólag csak a HATAR vonalon - Be lehet bizonyítani hogy ha létezik út a a start és cél között, akkor a voronoi cella határvonalaival is el lehet oda jutni. - a start és cél pontokat is kiterjesztjük. Ha a robot start vagy vég cellába ér, ott a legrövidebb úton mozoghat a cél fele
6000 Kecskemét Nyíri út 11. Telefon: 76/481-474; Fax: 76/486-942 bjg@pr.hu www.banyai-kkt.sulinet.hu. Gyakorló feladatok
 BÁNYAI JÚLIA GIMNÁZIUM 6000 Kecskemét Nyíri út 11. Telefon: 76/481-474; Fax: 76/486-942 bjg@pr.hu www.banyai-kkt.sulinet.hu Gyakorló feladatok I. LEGO Robotprogramozó országos csapatversenyre A következő
BÁNYAI JÚLIA GIMNÁZIUM 6000 Kecskemét Nyíri út 11. Telefon: 76/481-474; Fax: 76/486-942 bjg@pr.hu www.banyai-kkt.sulinet.hu Gyakorló feladatok I. LEGO Robotprogramozó országos csapatversenyre A következő
Adatszerkezetek 2. Dr. Iványi Péter
 Adatszerkezetek 2. Dr. Iványi Péter 1 Fák Fákat akkor használunk, ha az adatok között valamilyen alá- és fölérendeltség van. Pl. könyvtárszerkezet gyökér (root) Nincsennek hurkok!!! 2 Bináris fák Azokat
Adatszerkezetek 2. Dr. Iványi Péter 1 Fák Fákat akkor használunk, ha az adatok között valamilyen alá- és fölérendeltség van. Pl. könyvtárszerkezet gyökér (root) Nincsennek hurkok!!! 2 Bináris fák Azokat
angolul: greedy algorithms, románul: algoritmi greedy
 Mohó algoritmusok angolul: greedy algorithms, románul: algoritmi greedy 1. feladat. Gazdaságos telefonhálózat építése Bizonyos városok között lehet direkt telefonkapcsolatot kiépíteni, pl. x és y város
Mohó algoritmusok angolul: greedy algorithms, románul: algoritmi greedy 1. feladat. Gazdaságos telefonhálózat építése Bizonyos városok között lehet direkt telefonkapcsolatot kiépíteni, pl. x és y város
NGB_IN040_1 SZIMULÁCIÓS TECHNIKÁK dr. Pozna Claudio Radu, Horváth Ernő
 SZÉCHENYI ISTVÁN EGYETEM Műszaki Tudományi Kar Informatika Tanszék BSC FOKOZATÚ MÉRNÖK INFORMATIKUS SZAK NGB_IN040_1 SZIMULÁCIÓS TECHNIKÁK dr. Pozna Claudio Radu, Horváth Ernő Fejlesztői dokumentáció GROUP#6
SZÉCHENYI ISTVÁN EGYETEM Műszaki Tudományi Kar Informatika Tanszék BSC FOKOZATÚ MÉRNÖK INFORMATIKUS SZAK NGB_IN040_1 SZIMULÁCIÓS TECHNIKÁK dr. Pozna Claudio Radu, Horváth Ernő Fejlesztői dokumentáció GROUP#6
17. előadás: Vektorok a térben
 17. előadás: Vektorok a térben Szabó Szilárd A vektor fogalma A mai előadásban n 1 tetszőleges egész szám lehet, de az egyszerűség kedvéért a képletek az n = 2 esetben szerepelnek. Vektorok: rendezett
17. előadás: Vektorok a térben Szabó Szilárd A vektor fogalma A mai előadásban n 1 tetszőleges egész szám lehet, de az egyszerűség kedvéért a képletek az n = 2 esetben szerepelnek. Vektorok: rendezett
(Solid modeling, Geometric modeling) Testmodell: egy létező vagy elképzelt objektum digitális reprezentációja.
 Testmodell: egy létező vagy elképzelt objektum digitális reprezentációja.") Testmodellezés Testmodellezés (Solid modeling, Geometric modeling) Testmodell: egy létező vagy elképzelt objektum digitális reprezentációja. A tervezés (modellezés) során megadjuk a objektum geometria
Testmodellezés Testmodellezés (Solid modeling, Geometric modeling) Testmodell: egy létező vagy elképzelt objektum digitális reprezentációja. A tervezés (modellezés) során megadjuk a objektum geometria
Infobionika ROBOTIKA. X. Előadás. Robot manipulátorok II. Direkt és inverz kinematika. Készült a HEFOP P /1.0 projekt keretében
 Infobionika ROBOTIKA X. Előadás Robot manipulátorok II. Direkt és inverz kinematika Készült a HEFOP-3.3.1-P.-2004-06-0018/1.0 projekt keretében Tartalom Direkt kinematikai probléma Denavit-Hartenberg konvenció
Infobionika ROBOTIKA X. Előadás Robot manipulátorok II. Direkt és inverz kinematika Készült a HEFOP-3.3.1-P.-2004-06-0018/1.0 projekt keretében Tartalom Direkt kinematikai probléma Denavit-Hartenberg konvenció
Haladó mozgások A hely és a mozgás viszonylagos. A testek helyét, mozgását valamilyen vonatkoztatási ponthoz, vonatkoztatási rendszerhez képest adjuk
 Haladó mozgások A hely és a mozgás viszonylagos. A testek helyét, mozgását valamilyen vonatkoztatási ponthoz, vonatkoztatási rendszerhez képest adjuk meg, ahhoz viszonyítjuk. pl. A vonatban utazó ember
Haladó mozgások A hely és a mozgás viszonylagos. A testek helyét, mozgását valamilyen vonatkoztatási ponthoz, vonatkoztatási rendszerhez képest adjuk meg, ahhoz viszonyítjuk. pl. A vonatban utazó ember
Diszkrét matematika 2. estis képzés
 Diszkrét matematika 2. estis képzés 2018. tavasz 1. Diszkrét matematika 2. estis képzés 11. előadás Nagy Gábor nagygabr@gmail.com nagy@compalg.inf.elte.hu compalg.inf.elte.hu/ nagy Komputeralgebra Tanszék
Diszkrét matematika 2. estis képzés 2018. tavasz 1. Diszkrét matematika 2. estis képzés 11. előadás Nagy Gábor nagygabr@gmail.com nagy@compalg.inf.elte.hu compalg.inf.elte.hu/ nagy Komputeralgebra Tanszék
Diszkrét matematika 2.C szakirány
 Diszkrét matematika 2.C szakirány 2017. tavasz 1. Diszkrét matematika 2.C szakirány 4. előadás Nagy Gábor nagygabr@gmail.com nagy@compalg.inf.elte.hu compalg.inf.elte.hu/ nagy Komputeralgebra Tanszék 2017.
Diszkrét matematika 2.C szakirány 2017. tavasz 1. Diszkrét matematika 2.C szakirány 4. előadás Nagy Gábor nagygabr@gmail.com nagy@compalg.inf.elte.hu compalg.inf.elte.hu/ nagy Komputeralgebra Tanszék 2017.
Diszkrét matematika 2.C szakirány
 Diszkrét matematika 2.C szakirány 2015. ősz 1. Diszkrét matematika 2.C szakirány 3. előadás Nagy Gábor nagygabr@gmail.com nagy@compalg.inf.elte.hu compalg.inf.elte.hu/ nagy Komputeralgebra Tanszék 2015.
Diszkrét matematika 2.C szakirány 2015. ősz 1. Diszkrét matematika 2.C szakirány 3. előadás Nagy Gábor nagygabr@gmail.com nagy@compalg.inf.elte.hu compalg.inf.elte.hu/ nagy Komputeralgebra Tanszék 2015.
Diszkrét matematika 2. estis képzés
 Diszkrét matematika 2. estis képzés 2018. tavasz 1. Diszkrét matematika 2. estis képzés 10. előadás Nagy Gábor nagygabr@gmail.com nagy@compalg.inf.elte.hu compalg.inf.elte.hu/ nagy Komputeralgebra Tanszék
Diszkrét matematika 2. estis képzés 2018. tavasz 1. Diszkrét matematika 2. estis képzés 10. előadás Nagy Gábor nagygabr@gmail.com nagy@compalg.inf.elte.hu compalg.inf.elte.hu/ nagy Komputeralgebra Tanszék
Sapientia - Erdélyi Magyar TudományEgyetem (EMTE) Csíkszereda IRT- 4. kurzus. 3. Előadás: A mohó algoritmus
 Csíkszereda IRT- 4. kurzus. 3. Előadás: A mohó algoritmus") Csíkszereda IRT-. kurzus 3. Előadás: A mohó algoritmus 1 Csíkszereda IRT. kurzus Bevezetés Az eddig tanult algoritmus tipúsok nem alkalmazhatók: A valós problémák nem tiszta klasszikus problémák A problémák
Csíkszereda IRT-. kurzus 3. Előadás: A mohó algoritmus 1 Csíkszereda IRT. kurzus Bevezetés Az eddig tanult algoritmus tipúsok nem alkalmazhatók: A valós problémák nem tiszta klasszikus problémák A problémák
3. tétel Térelemek távolsága és szöge. Nevezetes ponthalmazok a síkon és a térben.
 3. tétel Térelemek távolsága és szöge. Nevezetes ponthalmazok a síkon és a térben. TÁVOLSÁG Általános definíció: két alakzat távolsága a két alakzat pontjai között húzható legrövidebb szakasz hosszaa távolság
3. tétel Térelemek távolsága és szöge. Nevezetes ponthalmazok a síkon és a térben. TÁVOLSÁG Általános definíció: két alakzat távolsága a két alakzat pontjai között húzható legrövidebb szakasz hosszaa távolság
Mechatronika segédlet 10. gyakorlat
 Mechatronika segédlet 10. gyakorlat 2017. április 21. Tartalom Vadai Gergely, Faragó Dénes Feladatleírás... 1 simrobot... 2 Paraméterei... 2 Visszatérési értéke... 2 Kód... 2 simrobotmdl... 3 robotsen.mdl...
Mechatronika segédlet 10. gyakorlat 2017. április 21. Tartalom Vadai Gergely, Faragó Dénes Feladatleírás... 1 simrobot... 2 Paraméterei... 2 Visszatérési értéke... 2 Kód... 2 simrobotmdl... 3 robotsen.mdl...
Digitális Domborzat Modellek (DTM)
") Digitális Domborzat Modellek (DTM) Digitális Domborzat Modellek (DTM) Digitális Domborzat Modellek (DTM) DTM fogalma A földfelszín számítógéppel kezelhető topográfiai modellje Cél: tetszőleges pontban
Digitális Domborzat Modellek (DTM) Digitális Domborzat Modellek (DTM) Digitális Domborzat Modellek (DTM) DTM fogalma A földfelszín számítógéppel kezelhető topográfiai modellje Cél: tetszőleges pontban
Pálya : Az a vonal, amelyen a mozgó test végighalad. Út: A pályának az a része, amelyet adott idő alatt a mozgó tárgy megtesz.
 Haladó mozgások A hely és a mozgás viszonylagos. A testek helyét, mozgását valamilyen vonatkoztatási ponthoz, vonatkoztatási rendszerhez képest adjuk meg, ahhoz viszonyítjuk. pl. A vonatban utazó ember
Haladó mozgások A hely és a mozgás viszonylagos. A testek helyét, mozgását valamilyen vonatkoztatási ponthoz, vonatkoztatási rendszerhez képest adjuk meg, ahhoz viszonyítjuk. pl. A vonatban utazó ember
Kereső algoritmusok a diszkrét optimalizálás problémájához
 Kereső algoritmusok a diszkrét optimalizálás problémájához A. Grama, A. Gupta, G. Karypis és V. Kumar: Introduction to Parallel Computing, Addison Wesley, 2003. könyv anyaga alapján A kereső eljárások
Kereső algoritmusok a diszkrét optimalizálás problémájához A. Grama, A. Gupta, G. Karypis és V. Kumar: Introduction to Parallel Computing, Addison Wesley, 2003. könyv anyaga alapján A kereső eljárások
Mesterséges intelligencia 2. laborgyakorlat
 Mesterséges intelligencia 2. laborgyakorlat Keresési módszerek A legtöbb feladatot meg lehet határozni keresési feladatként: egy ún. állapottérben, amely tartalmazza az összes lehetséges állapotot fogjuk
Mesterséges intelligencia 2. laborgyakorlat Keresési módszerek A legtöbb feladatot meg lehet határozni keresési feladatként: egy ún. állapottérben, amely tartalmazza az összes lehetséges állapotot fogjuk
Diszkrét matematika 2.C szakirány
 Diszkrét matematika 2.C szakirány 2017. tavasz 1. Diszkrét matematika 2.C szakirány 3. előadás Nagy Gábor nagygabr@gmail.com nagy@compalg.inf.elte.hu compalg.inf.elte.hu/ nagy Komputeralgebra Tanszék 2017.
Diszkrét matematika 2.C szakirány 2017. tavasz 1. Diszkrét matematika 2.C szakirány 3. előadás Nagy Gábor nagygabr@gmail.com nagy@compalg.inf.elte.hu compalg.inf.elte.hu/ nagy Komputeralgebra Tanszék 2017.
1. Előadás Lineáris programozás
 1. Előadás Lineáris programozás Salamon Júlia Előadás II. éves gazdaság informatikus hallgatók számára Operációkutatás Az operációkutatás az alkalmazott matematika az az ága, ami bizonyos folyamatok és
1. Előadás Lineáris programozás Salamon Júlia Előadás II. éves gazdaság informatikus hallgatók számára Operációkutatás Az operációkutatás az alkalmazott matematika az az ága, ami bizonyos folyamatok és
Szimulációs technikák
 SZÉCHENYI ISTVÁN EGYETEM Műszaki Tudományi Kar Informatikai tanszék Szimulációs technikák ( NGB_IN040_1) 2. csapat Comparator - Dokumentáció Mérnök informatikus BSc szak, nappali tagozat 2012/2013 II.
SZÉCHENYI ISTVÁN EGYETEM Műszaki Tudományi Kar Informatikai tanszék Szimulációs technikák ( NGB_IN040_1) 2. csapat Comparator - Dokumentáció Mérnök informatikus BSc szak, nappali tagozat 2012/2013 II.
Kereső algoritmusok a diszkrét optimalizálás problémájához
 Kereső algoritmusok a diszkrét optimalizálás problémájához A. Grama, A. Gupta, G. Karypis és V. Kumar: Introduction to Parallel Computing, Addison Wesley, 2003. könyv anyaga alapján A kereső eljárások
Kereső algoritmusok a diszkrét optimalizálás problémájához A. Grama, A. Gupta, G. Karypis és V. Kumar: Introduction to Parallel Computing, Addison Wesley, 2003. könyv anyaga alapján A kereső eljárások
Mesterséges Intelligencia. Csató Lehel. Csató Lehel. Matematika-Informatika Tanszék Babeş Bolyai Tudományegyetem, Kolozsvár 2007/2008
 Matematika-Informatika Tanszék Babeş Bolyai Tudományegyetem, Kolozsvár 2007/2008 Az Előadások Témái Bevezető: mi a mesterséges intelligencia... Tudás reprezentáció stratégiák Szemantikus hálók / Keretrendszerek
Matematika-Informatika Tanszék Babeş Bolyai Tudományegyetem, Kolozsvár 2007/2008 Az Előadások Témái Bevezető: mi a mesterséges intelligencia... Tudás reprezentáció stratégiák Szemantikus hálók / Keretrendszerek
EÖTVÖS LORÁND SZAKKÖZÉP- ÉS SZAKISKOLA TANÍTÁST SEGÍTŐ OKTATÁSI ANYAGOK MÉRÉS TANTÁRGY
 EÖTVÖS LORÁND SZAKKÖZÉP- ÉS SZAKISKOLA TANÍTÁST SEGÍTŐ OKTATÁSI ANYAGOK MÉRÉS TANTÁRGY SÍKIDOMOK Síkidom 1 síkidom az a térelem, amelynek valamennyi pontja ugyan abban a síkban helyezkedik el. A síkidomokat
EÖTVÖS LORÁND SZAKKÖZÉP- ÉS SZAKISKOLA TANÍTÁST SEGÍTŐ OKTATÁSI ANYAGOK MÉRÉS TANTÁRGY SÍKIDOMOK Síkidom 1 síkidom az a térelem, amelynek valamennyi pontja ugyan abban a síkban helyezkedik el. A síkidomokat
26. MINIMÁLIS KÖLTSÉGŰ UTAK MINDEN CSÚCSPÁRRA
 26. MINIMÁLIS KÖLTSÉGŰ UTAK MINDEN CSÚCSPÁRRA Az előző két fejezetben tárgyalt feladat általánosításaként a gráfban található összes csúcspárra szeretnénk meghatározni a legkisebb költségű utat. A probléma
26. MINIMÁLIS KÖLTSÉGŰ UTAK MINDEN CSÚCSPÁRRA Az előző két fejezetben tárgyalt feladat általánosításaként a gráfban található összes csúcspárra szeretnénk meghatározni a legkisebb költségű utat. A probléma
Ferde kúp ellipszis metszete
 Ferde kúp ellipszis metszete A ferde kúp az első képsíkon lévő vezérkörével és az M csúcsponttal van megadva. Ha a kúpból ellipszist szeretnénk metszeni, akkor a metsző síknak minden alkotót végesben kell
Ferde kúp ellipszis metszete A ferde kúp az első képsíkon lévő vezérkörével és az M csúcsponttal van megadva. Ha a kúpból ellipszist szeretnénk metszeni, akkor a metsző síknak minden alkotót végesben kell
1/ gyakorlat. Hiperbolikus programozási feladat megoldása. Pécsi Tudományegyetem PTI
 1/12 Operációkutatás 5. gyakorlat Hiperbolikus programozási feladat megoldása Pécsi Tudományegyetem PTI 2/12 Ha az Hiperbolikus programozási feladat feltételek teljesülése mellett a A x b x 0 z(x) = c
1/12 Operációkutatás 5. gyakorlat Hiperbolikus programozási feladat megoldása Pécsi Tudományegyetem PTI 2/12 Ha az Hiperbolikus programozási feladat feltételek teljesülése mellett a A x b x 0 z(x) = c
VI. Robotprogramozó Országos Csapatverseny Döntő versenyfeladatok. 5. évfolyam
 VI. Robotprogramozó Országos Csapatverseny Döntő versenyfeladatok 5. évfolyam 2015. április 25. A robot portjainak kiosztása: Motorok: B és C Szenzorok: Ütközésérzékelő (Touch): Fényszenzor/színszenzor
VI. Robotprogramozó Országos Csapatverseny Döntő versenyfeladatok 5. évfolyam 2015. április 25. A robot portjainak kiosztása: Motorok: B és C Szenzorok: Ütközésérzékelő (Touch): Fényszenzor/színszenzor
Mesterséges Intelligencia. Csató Lehel. Csató Lehel. Matematika-Informatika Tanszék Babeş Bolyai Tudományegyetem, Kolozsvár 2007/2008
 Matematika-Informatika Tanszék Babeş Bolyai Tudományegyetem, Kolozsvár 007/008 Az Előadások Témái Bevezető: mi a mesterséges intelligencia... Tudás reprezentáció i stratégiák Szemantikus hálók / Keretrendszerek
Matematika-Informatika Tanszék Babeş Bolyai Tudományegyetem, Kolozsvár 007/008 Az Előadások Témái Bevezető: mi a mesterséges intelligencia... Tudás reprezentáció i stratégiák Szemantikus hálók / Keretrendszerek
NULLADIK MATEMATIKA szeptember 13.
 A NULLADIK MATEMATIKA ZÁRTHELYI 0. szeptember. Terem: Munkaidő: 0 perc. A dolgozat megírásához íróeszközön kívül semmilyen segédeszköz nem használható nálható. Válaszait csak az üres mezőkbe írja! A javítók
A NULLADIK MATEMATIKA ZÁRTHELYI 0. szeptember. Terem: Munkaidő: 0 perc. A dolgozat megírásához íróeszközön kívül semmilyen segédeszköz nem használható nálható. Válaszait csak az üres mezőkbe írja! A javítók
Mesterséges Intelligencia. Csató Lehel. Csató Lehel. Matematika-Informatika Tanszék Babeş Bolyai Tudományegyetem, Kolozsvár 2010/2011 1/363
 1/363 Matematika-Informatika Tanszék Babeş Bolyai Tudományegyetem, Kolozsvár 2010/2011 Az Előadások Témái 69/363 Bevezető: mi a mesterséges intelligencia... Tudás reprezentáció Gráfkeresési stratégiák
1/363 Matematika-Informatika Tanszék Babeş Bolyai Tudományegyetem, Kolozsvár 2010/2011 Az Előadások Témái 69/363 Bevezető: mi a mesterséges intelligencia... Tudás reprezentáció Gráfkeresési stratégiák
Pálya : Az a vonal, amelyen a mozgó test végighalad. Út: A pályának az a része, amelyet adott idő alatt a mozgó tárgy megtesz.
 Haladó mozgások A hely és a mozgás viszonylagos. A testek helyét, mozgását valamilyen vonatkoztatási ponthoz, vonatkoztatási rendszerhez képest adjuk meg, ahhoz viszonyítjuk. pl. A vonatban utazó ember
Haladó mozgások A hely és a mozgás viszonylagos. A testek helyét, mozgását valamilyen vonatkoztatási ponthoz, vonatkoztatási rendszerhez képest adjuk meg, ahhoz viszonyítjuk. pl. A vonatban utazó ember
BABEŞ BOLYAI TUDOMÁNYEGYETEM MATEMATIKA ÉS INFORMATIKA KAR BBTE Matek-Infó verseny 1. tételsor INFORMATIKA írásbeli. A versenyzők figyelmébe:
 BABEŞ BOLYAI TUDOMÁNYEGYETEM MATEMATIKA ÉS INFORMATIKA KAR BBTE Matek-Infó verseny 1. tételsor INFORMATIKA írásbeli A versenyzők figyelmébe: 1. A tömböket 1-től kezdődően indexeljük. 2. A rácstesztekre
BABEŞ BOLYAI TUDOMÁNYEGYETEM MATEMATIKA ÉS INFORMATIKA KAR BBTE Matek-Infó verseny 1. tételsor INFORMATIKA írásbeli A versenyzők figyelmébe: 1. A tömböket 1-től kezdődően indexeljük. 2. A rácstesztekre
IV. LEGO Robotprogramozó Országos Csapatverseny
 BÁNYAI JÚLIA GIMNÁZIUM - ROBOTIKA CSOPORT Tel.: 76/481-474 (+36 20 479 8460) Fax.: 76/486-942 web: http://www.banyai-kkt.sulinet.hu/robotika e-mail: robotika.bjg@gmail.com IV. LEGO Robotprogramozó Országos
BÁNYAI JÚLIA GIMNÁZIUM - ROBOTIKA CSOPORT Tel.: 76/481-474 (+36 20 479 8460) Fax.: 76/486-942 web: http://www.banyai-kkt.sulinet.hu/robotika e-mail: robotika.bjg@gmail.com IV. LEGO Robotprogramozó Országos
Speciális útkereső algoritmusok. Kelemen Zsolt
 Speciális útkereső algoritmusok Kelemen Zsolt Röviden Útkeresési algoritmusok: gráfos keresés gráf nélküli keresés ant search (hangya alapú keresés) Általában a mesterséges intelligencia egyik legrégebbi
Speciális útkereső algoritmusok Kelemen Zsolt Röviden Útkeresési algoritmusok: gráfos keresés gráf nélküli keresés ant search (hangya alapú keresés) Általában a mesterséges intelligencia egyik legrégebbi
5/1. tétel: Optimalis feszítőfák, Prim és Kruskal algorithmusa. Legrövidebb utak graphokban, negatív súlyú élek, Dijkstra és Bellman Ford algorithmus.
 5/1. tétel: Optimalis feszítőfák, Prim és Kruskal algorithmusa. Legrövidebb utak graphokban, negatív súlyú élek, Dijkstra és Bellman Ford algorithmus. Optimalis feszítőfák Egy összefüggő, irányítatlan
5/1. tétel: Optimalis feszítőfák, Prim és Kruskal algorithmusa. Legrövidebb utak graphokban, negatív súlyú élek, Dijkstra és Bellman Ford algorithmus. Optimalis feszítőfák Egy összefüggő, irányítatlan
A Föld középpontja felé szabadon eső test sebessége növekszik, azaz, a
 a Matematika mérnököknek I. című tárgyhoz Függvények. Függvények A Föld középpontja felé szabadon eső test sebessége növekszik, azaz, a szabadon eső test sebessége az idő függvénye. Konstans hőmérsékleten
a Matematika mérnököknek I. című tárgyhoz Függvények. Függvények A Föld középpontja felé szabadon eső test sebessége növekszik, azaz, a szabadon eső test sebessége az idő függvénye. Konstans hőmérsékleten
Diszkrét matematika 2. estis képzés
 Diszkrét matematika 2. estis képzés 2018. tavasz 1. Diszkrét matematika 2. estis képzés 9. előadás Nagy Gábor nagygabr@gmail.com nagy@compalg.inf.elte.hu compalg.inf.elte.hu/ nagy Komputeralgebra Tanszék
Diszkrét matematika 2. estis képzés 2018. tavasz 1. Diszkrét matematika 2. estis képzés 9. előadás Nagy Gábor nagygabr@gmail.com nagy@compalg.inf.elte.hu compalg.inf.elte.hu/ nagy Komputeralgebra Tanszék
Pálya : Az a vonal, amelyen a mozgó tárgy, test végighalad. Út: A pályának az a része, amelyet adott idő alatt a mozgó tárgy megtesz.
 Haladó mozgások A hely és a mozgás viszonylagos. A testek helyét, mozgását valamilyen vonatkoztatási ponthoz, vonatkoztatási rendszerhez képest adjuk meg, ahhoz viszonyítjuk. pl. A vonatban utazó ember
Haladó mozgások A hely és a mozgás viszonylagos. A testek helyét, mozgását valamilyen vonatkoztatási ponthoz, vonatkoztatási rendszerhez képest adjuk meg, ahhoz viszonyítjuk. pl. A vonatban utazó ember
Algoritmuselmélet 7. előadás
 Algoritmuselmélet 7. előadás Katona Gyula Y. Budapesti Műszaki és Gazdaságtudományi Egyetem Számítástudományi Tsz. I. B. 137/b kiskat@cs.bme.hu 2002 Március 11. ALGORITMUSELMÉLET 7. ELŐADÁS 1 Múltkori
Algoritmuselmélet 7. előadás Katona Gyula Y. Budapesti Műszaki és Gazdaságtudományi Egyetem Számítástudományi Tsz. I. B. 137/b kiskat@cs.bme.hu 2002 Március 11. ALGORITMUSELMÉLET 7. ELŐADÁS 1 Múltkori
Egy feladat megoldása Geogebra segítségével
 Egy feladat megoldása Geogebra segítségével A következőkben a Geogebra dinamikus geometriai szerkesztőprogram egy felhasználási lehetőségéről lesz szó, mindez bemutatva egy feladat megoldása során. A Geogebra
Egy feladat megoldása Geogebra segítségével A következőkben a Geogebra dinamikus geometriai szerkesztőprogram egy felhasználási lehetőségéről lesz szó, mindez bemutatva egy feladat megoldása során. A Geogebra
Koordináta-geometria feladatok (emelt szint)
") Koordináta-geometria feladatok (emelt szint) 1. (ESZÉV Minta (2) 2004.05/7) Egy ABC háromszögben CAB = 30, az ACB = 45. A háromszög két csúcsának koordinátái: A(2; 2) és C(4; 2). Határozza meg a harmadik
Koordináta-geometria feladatok (emelt szint) 1. (ESZÉV Minta (2) 2004.05/7) Egy ABC háromszögben CAB = 30, az ACB = 45. A háromszög két csúcsának koordinátái: A(2; 2) és C(4; 2). Határozza meg a harmadik
1. gyakorlat. Egyenletes és egyenletesen változó mozgás. 1. példa
 1. gyakorlat Egyenletes és egyenletesen változó mozgás egyenletes mozgás egyenletesen változó mozgás gyorsulás a = 0 a(t) = a = állandó sebesség v(t) = v = állandó v(t) = v(0) + a t pályakoordináta s(t)
1. gyakorlat Egyenletes és egyenletesen változó mozgás egyenletes mozgás egyenletesen változó mozgás gyorsulás a = 0 a(t) = a = állandó sebesség v(t) = v = állandó v(t) = v(0) + a t pályakoordináta s(t)
Algoritmusok bonyolultsága
 Algoritmusok bonyolultsága 5. előadás http://www.ms.sapientia.ro/~kasa/komplex.htm 1 / 27 Gazdaságos faváz Kruskal-algoritmus Joseph Kruskal (1928 2010) Legyen V = {v 1, v 2,..., v n }, E = {e 1, e 2,...,
Algoritmusok bonyolultsága 5. előadás http://www.ms.sapientia.ro/~kasa/komplex.htm 1 / 27 Gazdaságos faváz Kruskal-algoritmus Joseph Kruskal (1928 2010) Legyen V = {v 1, v 2,..., v n }, E = {e 1, e 2,...,
Monte Carlo módszerek a statisztikus fizikában. Az Ising modell. 8. előadás
 Monte Carlo módszerek a statisztikus fizikában. Az Ising modell. 8. előadás Démon algoritmus az ideális gázra időátlag fizikai mennyiségek átlagértéke sokaságátlag E, V, N pl. molekuláris dinamika Monte
Monte Carlo módszerek a statisztikus fizikában. Az Ising modell. 8. előadás Démon algoritmus az ideális gázra időátlag fizikai mennyiségek átlagértéke sokaságátlag E, V, N pl. molekuláris dinamika Monte
Gráfok 2. Legrövidebb utak, feszítőfák. Szoftvertervezés és -fejlesztés II. előadás. Szénási Sándor
 Gráfok 2. Legrövidebb utak, feszítőfák előadás http://nik.uni-obuda.hu/sztf2 Szénási Sándor Óbudai Egyetem,Neumann János Informatikai Kar Legrövidebb utak keresése Minimális feszítőfa keresése Gráfok 2
Gráfok 2. Legrövidebb utak, feszítőfák előadás http://nik.uni-obuda.hu/sztf2 Szénási Sándor Óbudai Egyetem,Neumann János Informatikai Kar Legrövidebb utak keresése Minimális feszítőfa keresése Gráfok 2
W = F s A munka származtatott, előjeles skalármennyiség.
 Ha az erő és az elmozdulás egymásra merőleges, akkor fizikai értelemben nem történik munkavégzés. Pl.: ha egy táskát függőlegesen tartunk, és úgy sétálunk, akkor sem a tartóerő, sem a nehézségi erő nem
Ha az erő és az elmozdulás egymásra merőleges, akkor fizikai értelemben nem történik munkavégzés. Pl.: ha egy táskát függőlegesen tartunk, és úgy sétálunk, akkor sem a tartóerő, sem a nehézségi erő nem
További forgalomirányítási és szervezési játékok. 1. Nematomi forgalomirányítási játék
 További forgalomirányítási és szervezési játékok 1. Nematomi forgalomirányítási játék A forgalomirányítási játékban adott egy hálózat, ami egy irányított G = (V, E) gráf. A gráfban megengedjük, hogy két
További forgalomirányítási és szervezési játékok 1. Nematomi forgalomirányítási játék A forgalomirányítási játékban adott egy hálózat, ami egy irányított G = (V, E) gráf. A gráfban megengedjük, hogy két
Minimum követelmények matematika tantárgyból 11. évfolyamon
 Minimum követelmények matematika tantárgyból. évfolyamon A hatványozás általánosítása pozitív alap esetén racionális kitevőre. Műveletek hatványokkal. A, a 0 függvény. Az eponenciális függvény. Vizsgálata
Minimum követelmények matematika tantárgyból. évfolyamon A hatványozás általánosítása pozitív alap esetén racionális kitevőre. Műveletek hatványokkal. A, a 0 függvény. Az eponenciális függvény. Vizsgálata
Elengedhetetlen a játékokban, mozi produkciós eszközökben Nélküle kvantum hatás lép fel. Az objektumok áthaladnak a többi objektumon
 Bevezetés Ütközés detektálás Elengedhetetlen a játékokban, mozi produkciós eszközökben Nélküle kvantum hatás lép fel Az objektumok áthaladnak a többi objektumon A valósághű megjelenítés része Nem tisztán
Bevezetés Ütközés detektálás Elengedhetetlen a játékokban, mozi produkciós eszközökben Nélküle kvantum hatás lép fel Az objektumok áthaladnak a többi objektumon A valósághű megjelenítés része Nem tisztán
Problémamegoldás kereséssel. Mesterséges intelligencia március 7.
 Problémamegoldás kereséssel Mesterséges intelligencia 2014. március 7. Bevezetés Problémamegoldó ágens Kívánt állapotba vezető cselekvéseket keres Probléma megfogalmazása Megoldás megfogalmazása Keresési
Problémamegoldás kereséssel Mesterséges intelligencia 2014. március 7. Bevezetés Problémamegoldó ágens Kívánt állapotba vezető cselekvéseket keres Probléma megfogalmazása Megoldás megfogalmazása Keresési
Lendület. Lendület (impulzus): A test tömegének és sebességének szorzata. vektormennyiség: iránya a sebesség vektor iránya.
: A test tömegének és sebességének szorzata. vektormennyiség: iránya a sebesség vektor iránya.") Lendület Lendület (impulzus): A test tömegének és sebességének szorzata. vektormennyiség: iránya a sebesség vektor iránya. Lendülettétel: Az lendület erő hatására változik meg. Az eredő erő határozza meg
Lendület Lendület (impulzus): A test tömegének és sebességének szorzata. vektormennyiség: iránya a sebesség vektor iránya. Lendülettétel: Az lendület erő hatására változik meg. Az eredő erő határozza meg
Mesterséges Intelligencia MI
 Mesterséges Intelligencia MI Problémamegoldás kereséssel ha sötétben tapogatózunk Dobrowiecki Tadeusz Eredics Péter, és mások BME I.E. 437, 463-28-99 dobrowiecki@mit.bme.hu, http://www.mit.bme.hu/general/staff/tade
Mesterséges Intelligencia MI Problémamegoldás kereséssel ha sötétben tapogatózunk Dobrowiecki Tadeusz Eredics Péter, és mások BME I.E. 437, 463-28-99 dobrowiecki@mit.bme.hu, http://www.mit.bme.hu/general/staff/tade
Mechatronika segédlet 11. gyakorlat
 Mechatronika segédlet 11. gyakorlat 2017. április 23. Tartalom Vadai Gergely, Faragó Dénes Feladatleírás... 2 Konstansok helyettesítése függvénnyel... 2 Megoldás... 2 Irányítás... 3 Megoldás... 4 maxspeed
Mechatronika segédlet 11. gyakorlat 2017. április 23. Tartalom Vadai Gergely, Faragó Dénes Feladatleírás... 2 Konstansok helyettesítése függvénnyel... 2 Megoldás... 2 Irányítás... 3 Megoldás... 4 maxspeed
Diszkrét matematika 2.
 Diszkrét matematika 2. Mérai László előadása alapján Készítette: Nagy Krisztián 1. előadás Gráfok halmaza, gráf, ahol a csúcsok halmaza, az élek illesztkedés reláció: illesztkedik az élre, ha ( -él illesztkedik
Diszkrét matematika 2. Mérai László előadása alapján Készítette: Nagy Krisztián 1. előadás Gráfok halmaza, gráf, ahol a csúcsok halmaza, az élek illesztkedés reláció: illesztkedik az élre, ha ( -él illesztkedik
A 2017/2018 tanévi Országos Középiskolai Tanulmányi Verseny döntő fordulójának feladatai. INFORMATIKA II. (programozás) kategória
 kategória") Oktatási Hivatal A 217/218 tanévi Országos Középiskolai Tanulmányi Verseny döntő fordulójának feladatai 1. feladat: Csatornák (24 pont) INFORMATIKA II. (programozás) kategória Egy város csomópontjait csatornahálózat
Oktatási Hivatal A 217/218 tanévi Országos Középiskolai Tanulmányi Verseny döntő fordulójának feladatai 1. feladat: Csatornák (24 pont) INFORMATIKA II. (programozás) kategória Egy város csomópontjait csatornahálózat
HALMAZOK. A racionális számok halmazát olyan számok alkotják, amelyek felírhatók b. jele:. A racionális számok halmazának végtelen sok eleme van.
 HALMAZOK Tanulási cél Halmazok megadása, halmazműveletek megismerése és alkalmazása, halmazok ábrázolása Venn diagramon. Motivációs példa Egy fogyasztó 80 000 pénzegység jövedelmet fordít két termék, x
HALMAZOK Tanulási cél Halmazok megadása, halmazműveletek megismerése és alkalmazása, halmazok ábrázolása Venn diagramon. Motivációs példa Egy fogyasztó 80 000 pénzegység jövedelmet fordít két termék, x
Skaláris szorzat: a b cos, ahol α a két vektor által bezárt szög.
 1 Összeadás: Legyen a (7; 3) és b (- 2; 4), akkor az összegük a + b (7 + (-2); 3 + 4) = (5; 7) Kivonás: Legyen a (7; 3) és b (- 2; 4), akkor a különbségük a b (7 - (-2); 3-4)=(9; - 1) Valós számmal való
1 Összeadás: Legyen a (7; 3) és b (- 2; 4), akkor az összegük a + b (7 + (-2); 3 + 4) = (5; 7) Kivonás: Legyen a (7; 3) és b (- 2; 4), akkor a különbségük a b (7 - (-2); 3-4)=(9; - 1) Valós számmal való
Robotika. Relatív helymeghatározás Odometria
 Robotika Relatív helymeghatározás Odometria Differenciális hajtás c m =πd n /nc e c m D n C e n = hány mm-t tesz meg a robot egy jeladó impulzusra = névleges kerék átmérő = jeladó fölbontása (impulzus/ford.)
Robotika Relatív helymeghatározás Odometria Differenciális hajtás c m =πd n /nc e c m D n C e n = hány mm-t tesz meg a robot egy jeladó impulzusra = névleges kerék átmérő = jeladó fölbontása (impulzus/ford.)
Diszkrét matematika 2.C szakirány
 Diszkrét matematika 2.C szakirány 2015. tavasz 1. Diszkrét matematika 2.C szakirány 1. előadás Nagy Gábor nagygabr@gmail.com nagy@compalg.inf.elte.hu Komputeralgebra Tanszék 2015. tavasz Gráfelmélet Diszkrét
Diszkrét matematika 2.C szakirány 2015. tavasz 1. Diszkrét matematika 2.C szakirány 1. előadás Nagy Gábor nagygabr@gmail.com nagy@compalg.inf.elte.hu Komputeralgebra Tanszék 2015. tavasz Gráfelmélet Diszkrét
6. MECHANIKA-STATIKA GYAKORLAT Kidolgozta: Triesz Péter egy. ts. Négy erő egyensúlya, Culmann-szerkesztés, Ritter-számítás
 ZÉHENYI ITVÁN EGYETE GÉPZERKEZETTN É EHNIK TNZÉK 6. EHNIK-TTIK GYKORLT Kidolgozta: Triesz Péter egy. ts. Négy erő egyensúlya ulmann-szerkesztés Ritter-számítás 6.. Példa Egy létrát egy verembe letámasztunk
ZÉHENYI ITVÁN EGYETE GÉPZERKEZETTN É EHNIK TNZÉK 6. EHNIK-TTIK GYKORLT Kidolgozta: Triesz Péter egy. ts. Négy erő egyensúlya ulmann-szerkesztés Ritter-számítás 6.. Példa Egy létrát egy verembe letámasztunk
Mesterséges Intelligencia. Csató Lehel. Csató Lehel. Matematika-Informatika Tanszék Babeş Bolyai Tudományegyetem, Kolozsvár 2007/2008
 Matematika-Informatika Tanszék Babeş Bolyai Tudományegyetem, Kolozsvár 2007/2008 Az Előadások Témái Bevezető: mi a mesterséges intelligencia... Tudás reprezentáció Gráfkeresési stratégiák Szemantikus hálók
Matematika-Informatika Tanszék Babeş Bolyai Tudományegyetem, Kolozsvár 2007/2008 Az Előadások Témái Bevezető: mi a mesterséges intelligencia... Tudás reprezentáció Gráfkeresési stratégiák Szemantikus hálók
Időjárási csúcsok. Bemenet. Kimenet. Példa. Korlátok. Nemes Tihamér Nemzetközi Informatikai Tanulmányi Verseny, 2-3. korcsoport
 Időjárási csúcsok Ismerjük N napra a déli hőmérséklet értékét. Lokálisan melegnek nevezünk egy napot (az első és az utolsó kivételével), ha az aznap mért érték nagyobb volt a két szomszédjánál, lokálisan
Időjárási csúcsok Ismerjük N napra a déli hőmérséklet értékét. Lokálisan melegnek nevezünk egy napot (az első és az utolsó kivételével), ha az aznap mért érték nagyobb volt a két szomszédjánál, lokálisan
Vonatablakon át. A szabadvezeték alakjának leírása. 1. ábra
 1 Vonatablakon át Sokat utazom vonaton, és gyakran elnézem a vonatablakon át a légvezeték(ek) táncát. Már régóta gondolom, hogy le kellene írni ezt a látszólagos mozgást. Most erről lesz szó. Ehhez tekintsük
1 Vonatablakon át Sokat utazom vonaton, és gyakran elnézem a vonatablakon át a légvezeték(ek) táncát. Már régóta gondolom, hogy le kellene írni ezt a látszólagos mozgást. Most erről lesz szó. Ehhez tekintsük
bármely másikra el lehessen jutni. A vállalat tudja, hogy tetszőlegesen adott
 . Minimális súlyú feszítő fa keresése Képzeljük el, hogy egy útépítő vállalat azt a megbízást kapja, hogy építsen ki egy úthálózatot néhány település között (a települések között jelenleg nincs út). feltétel
. Minimális súlyú feszítő fa keresése Képzeljük el, hogy egy útépítő vállalat azt a megbízást kapja, hogy építsen ki egy úthálózatot néhány település között (a települések között jelenleg nincs út). feltétel
Új műveletek egy háromértékű logikában
 A Magyar Tudomány Napja 2012. Új műveletek egy háromértékű logikában Dr. Szász Gábor és Dr. Gubán Miklós Tartalom A probléma előzményei A hagyományos műveletek Az új műveletek koncepciója Alkalmazási példák
A Magyar Tudomány Napja 2012. Új műveletek egy háromértékű logikában Dr. Szász Gábor és Dr. Gubán Miklós Tartalom A probléma előzményei A hagyományos műveletek Az új műveletek koncepciója Alkalmazási példák
10. Tétel Háromszög. Elnevezések: Háromszög Kerülete: a + b + c Területe: (a * m a )/2; (b * m b )/2; (c * m c )/2
/2; (b * m b )/2; (c * m c )/2") 10. Tétel Háromszög Tulajdonságok: - Háromszögnek nevezzük a sokszöget, ha 3 oldala, 3 csúcsa és 3 szöge van - A háromszög belső szögeinek összege 180 o - A háromszög külső szögeinek összege 360 o - A
10. Tétel Háromszög Tulajdonságok: - Háromszögnek nevezzük a sokszöget, ha 3 oldala, 3 csúcsa és 3 szöge van - A háromszög belső szögeinek összege 180 o - A háromszög külső szögeinek összege 360 o - A
Követelmény az 5. évfolyamon félévkor matematikából
 Követelmény az 5. évfolyamon félévkor matematikából Gondolkodási és megismerési módszerek Néhány elem kiválasztása adott szempont szerint. Néhány elem sorba rendezése, az összes lehetséges sorrend felsorolása.
Követelmény az 5. évfolyamon félévkor matematikából Gondolkodási és megismerési módszerek Néhány elem kiválasztása adott szempont szerint. Néhány elem sorba rendezése, az összes lehetséges sorrend felsorolása.
PISA2000. Nyilvánosságra hozott feladatok matematikából
 PISA2000 Nyilvánosságra hozott feladatok matematikából Tartalom Tartalom 3 Almafák 8 Földrész területe 12 Háromszögek 14 Házak 16 Versenyautó sebessége Almafák M136 ALMAFÁK Egy gazda kertjében négyzetrács
PISA2000 Nyilvánosságra hozott feladatok matematikából Tartalom Tartalom 3 Almafák 8 Földrész területe 12 Háromszögek 14 Házak 16 Versenyautó sebessége Almafák M136 ALMAFÁK Egy gazda kertjében négyzetrács
Koordináta-geometria feladatgyűjtemény (A feladatok megoldásai a dokumentum végén találhatók)
") Koordináta-geometria feladatgyűjtemény (A feladatok megoldásai a dokumentum végén találhatók) Vektorok 1. Egy négyzet két szemközti csúcsának koordinátái: A( ; 7) és C(4 ; 1). Határozd meg a másik két
Koordináta-geometria feladatgyűjtemény (A feladatok megoldásai a dokumentum végén találhatók) Vektorok 1. Egy négyzet két szemközti csúcsának koordinátái: A( ; 7) és C(4 ; 1). Határozd meg a másik két
Algoritmuselmélet 2. előadás
 Algoritmuselmélet 2. előadás Katona Gyula Y. Budapesti Műszaki és Gazdaságtudományi Egyetem Számítástudományi Tsz. I. B. 137/b kiskat@cs.bme.hu 2002 Február 12. ALGORITMUSELMÉLET 2. ELŐADÁS 1 Buborék-rendezés
Algoritmuselmélet 2. előadás Katona Gyula Y. Budapesti Műszaki és Gazdaságtudományi Egyetem Számítástudományi Tsz. I. B. 137/b kiskat@cs.bme.hu 2002 Február 12. ALGORITMUSELMÉLET 2. ELŐADÁS 1 Buborék-rendezés
Gráfok 1. Tárolási módok, bejárások. Szoftvertervezés és -fejlesztés II. előadás. Szénási Sándor
 Gráfok 1. Tárolási módok, bejárások előadás http://nik.uni-obuda.hu/sztf2 Szénási Sándor szenasi.sandor@nik.uni-obuda.hu Óbudai Egyetem,Neumann János Informatikai Kar Gráfok 1. Tárolási módok Szélességi
Gráfok 1. Tárolási módok, bejárások előadás http://nik.uni-obuda.hu/sztf2 Szénási Sándor szenasi.sandor@nik.uni-obuda.hu Óbudai Egyetem,Neumann János Informatikai Kar Gráfok 1. Tárolási módok Szélességi
VIII. Robotprogramozó Országos Csapatverseny Regionális versenyfeladatok évfolyam
 A robot portjainak kiosztása VIII. Robotprogramozó Országos Csapatverseny Regionális versenyfeladatok Motorok: B és C Szenzorok: Ütközésérzékelő: Fény/szín szenzor: Fény/szín szenzor: Ultrahang szenzor:
A robot portjainak kiosztása VIII. Robotprogramozó Országos Csapatverseny Regionális versenyfeladatok Motorok: B és C Szenzorok: Ütközésérzékelő: Fény/szín szenzor: Fény/szín szenzor: Ultrahang szenzor:
Ellipszis átszelése. 1. ábra
 1 Ellipszis átszelése Adott egy a és b féltengely - adatokkal bíró ellipszis, melyet a befoglaló téglalapjának bal alsó sarkában csuklósan rögzítettnek képzelünk. Az ellipszist e C csukló körül forgatva
1 Ellipszis átszelése Adott egy a és b féltengely - adatokkal bíró ellipszis, melyet a befoglaló téglalapjának bal alsó sarkában csuklósan rögzítettnek képzelünk. Az ellipszist e C csukló körül forgatva
Gráfelmélet. I. Előadás jegyzet (2010.szeptember 9.) 1.A gráf fogalma
 1.A gráf fogalma") Készítette: Laczik Sándor János Gráfelmélet I. Előadás jegyzet (2010.szeptember 9.) 1.A gráf fogalma Definíció: a G=(V,E) párt egyszerű gráfnak nevezzük, (V elemeit a gráf csúcsainak/pontjainak,e elemeit
Készítette: Laczik Sándor János Gráfelmélet I. Előadás jegyzet (2010.szeptember 9.) 1.A gráf fogalma Definíció: a G=(V,E) párt egyszerű gráfnak nevezzük, (V elemeit a gráf csúcsainak/pontjainak,e elemeit
6. Függvények. 1. Az alábbi függvények közül melyik szigorúan monoton növekvő a 0;1 intervallumban?
 6. Függvények I. Nulladik ZH-ban láttuk: 1. Az alábbi függvények közül melyik szigorúan monoton növekvő a 0;1 intervallumban? f x g x cos x h x x ( ) sin x (A) Az f és a h. (B) Mindhárom. (C) Csak az f.
6. Függvények I. Nulladik ZH-ban láttuk: 1. Az alábbi függvények közül melyik szigorúan monoton növekvő a 0;1 intervallumban? f x g x cos x h x x ( ) sin x (A) Az f és a h. (B) Mindhárom. (C) Csak az f.
Diszkrét matematika 1. estis képzés
 Diszkrét matematika 1. estis képzés 2019. tavasz 1. Diszkrét matematika 1. estis képzés 11. előadás Nagy Gábor nagygabr@gmail.com nagy@compalg.inf.elte.hu compalg.inf.elte.hu/ nagy Mérai László diái alapján
Diszkrét matematika 1. estis képzés 2019. tavasz 1. Diszkrét matematika 1. estis képzés 11. előadás Nagy Gábor nagygabr@gmail.com nagy@compalg.inf.elte.hu compalg.inf.elte.hu/ nagy Mérai László diái alapján
Biofizika szeminárium. Diffúzió, ozmózis
 Biofizika szeminárium Diffúzió, ozmózis I. DIFFÚZIÓ ORVOSI BIOFIZIKA tankönyv: III./2 fejezet Részecskék mozgása Brown-mozgás Robert Brown o kísérlet: pollenszuszpenzió mikroszkópos vizsgálata o megfigyelés:
Biofizika szeminárium Diffúzió, ozmózis I. DIFFÚZIÓ ORVOSI BIOFIZIKA tankönyv: III./2 fejezet Részecskék mozgása Brown-mozgás Robert Brown o kísérlet: pollenszuszpenzió mikroszkópos vizsgálata o megfigyelés:
KOVÁCS BÉLA, MATEMATIKA I.
 KOVÁCS BÉLA, MATEmATIkA I. 3 III. MEGFELELTETÉSEk, RELÁCIÓk 1. BEVEZETÉS Emlékeztetünk arra, hogy az rendezett párok halmazát az és halmazok Descartes-féle szorzatának nevezzük. Más szóval az és halmazok
KOVÁCS BÉLA, MATEmATIkA I. 3 III. MEGFELELTETÉSEk, RELÁCIÓk 1. BEVEZETÉS Emlékeztetünk arra, hogy az rendezett párok halmazát az és halmazok Descartes-féle szorzatának nevezzük. Más szóval az és halmazok
Koordinátageometria. , azaz ( ) a B halmazt pontosan azok a pontok alkotják, amelynek koordinátáira:
 a B halmazt pontosan azok a pontok alkotják, amelynek koordinátáira:") 005-0XX Emelt szint Koordinátageometria 1) a) Egy derékszögű háromszög egyik oldalegyenese valamelyik koordinátatengely, egy másik oldalegyenesének egyenlete x + y = 10, egyik csúcsa az origó. Hány ilyen
005-0XX Emelt szint Koordinátageometria 1) a) Egy derékszögű háromszög egyik oldalegyenese valamelyik koordinátatengely, egy másik oldalegyenesének egyenlete x + y = 10, egyik csúcsa az origó. Hány ilyen
Táblázatkezelés (Excel)
") Táblázatkezelés (Excel) Tartalom felépítés kezelés egyéb lehetőségek hasznos kiegészítések Készítette: Bori Tamás 2 Felépítés I.: A program felépítése hagyományos MS GUI: menü eszköztár szabjuk testre!
Táblázatkezelés (Excel) Tartalom felépítés kezelés egyéb lehetőségek hasznos kiegészítések Készítette: Bori Tamás 2 Felépítés I.: A program felépítése hagyományos MS GUI: menü eszköztár szabjuk testre!
Szimuláció RICHARD M. KARP és AVI WIGDERSON. (Készítette: Domoszlai László)
") Szimuláció RICHARD M. KARP és AVI WIGDERSON A Fast Parallel Algorithm for the Maximal Independent Set Problem című cikke alapján (Készítette: Domoszlai László) 1. Bevezetés A következőkben megadott algoritmus
Szimuláció RICHARD M. KARP és AVI WIGDERSON A Fast Parallel Algorithm for the Maximal Independent Set Problem című cikke alapján (Készítette: Domoszlai László) 1. Bevezetés A következőkben megadott algoritmus
Mesterséges Intelligencia MI
 Mesterséges Intelligencia MI Problémamegoldás kereséssel - csak lokális információra alapozva Pataki Béla BME I.E. 414, 463-26-79 pataki@mit.bme.hu, http://www.mit.bme.hu/general/staff/pataki Lokálisan
Mesterséges Intelligencia MI Problémamegoldás kereséssel - csak lokális információra alapozva Pataki Béla BME I.E. 414, 463-26-79 pataki@mit.bme.hu, http://www.mit.bme.hu/general/staff/pataki Lokálisan
Koordináta-geometria feladatgyűjtemény
 Koordináta-geometria feladatgyűjtemény A feladatok megoldásai a dokumentum végén találhatók Vektorok 1. Egy négyzet két szemközti csúcsának koordinátái: A( ; 7) és C(4 ; 1). Határozd meg a másik két csúcs
Koordináta-geometria feladatgyűjtemény A feladatok megoldásai a dokumentum végén találhatók Vektorok 1. Egy négyzet két szemközti csúcsának koordinátái: A( ; 7) és C(4 ; 1). Határozd meg a másik két csúcs
c adatpontok és az ismeretlen pont közötti kovariancia vektora
 1. MELLÉKLET: Alkalmazott jelölések A mintaterület kiterjedése, területe c adatpontok és az ismeretlen pont közötti kovariancia vektora C(0) reziduális komponens varianciája C R (h) C R Cov{} d( u, X )
1. MELLÉKLET: Alkalmazott jelölések A mintaterület kiterjedése, területe c adatpontok és az ismeretlen pont közötti kovariancia vektora C(0) reziduális komponens varianciája C R (h) C R Cov{} d( u, X )
Kölcsönhatás diagramok
 Kölcsönhatás diagramok Célkitűzés Olvasni tudják az alap UML kölcsönhatás diagramok (kommunikáció és szekvencia) diagramok jelöléseit. 2 Bevezetés Miért léteznek az objektumok? Azért, hogy a rendszer valamilyen
Kölcsönhatás diagramok Célkitűzés Olvasni tudják az alap UML kölcsönhatás diagramok (kommunikáció és szekvencia) diagramok jelöléseit. 2 Bevezetés Miért léteznek az objektumok? Azért, hogy a rendszer valamilyen
10. Koordinátageometria
 I. Nulladik ZH-ban láttuk: 0. Koordinátageometria. Melyek azok a P x; y pontok, amelyek koordinátái kielégítik az Ábrázolja a megoldáshalmazt a koordináta-síkon! x y x 0 egyenlőtlenséget? ELTE 00. szeptember
I. Nulladik ZH-ban láttuk: 0. Koordinátageometria. Melyek azok a P x; y pontok, amelyek koordinátái kielégítik az Ábrázolja a megoldáshalmazt a koordináta-síkon! x y x 0 egyenlőtlenséget? ELTE 00. szeptember
4. Lokalizáció Magyar Attila
 4. Lokalizáció Magyar Attila Pannon Egyetem Műszaki Informatikai Kar Villamosmérnöki és Információs Rendszerek Tanszék magyar.attila@virt.uni-pannon.hu 2011. szeptember 23. 4. Lokalizáció 2 4. Tartalom
4. Lokalizáció Magyar Attila Pannon Egyetem Műszaki Informatikai Kar Villamosmérnöki és Információs Rendszerek Tanszék magyar.attila@virt.uni-pannon.hu 2011. szeptember 23. 4. Lokalizáció 2 4. Tartalom
Összeállította: dr. Leitold Adrien egyetemi docens
 Az R 3 tér geometriája Összeállította: dr. Leitold Adrien egyetemi docens 2008.09.08. 1 Vektorok Vektor: irányított szakasz Jel.: a, a, a, AB, Jellemzői: irány, hosszúság, (abszolút érték) jel.: a Speciális
Az R 3 tér geometriája Összeállította: dr. Leitold Adrien egyetemi docens 2008.09.08. 1 Vektorok Vektor: irányított szakasz Jel.: a, a, a, AB, Jellemzői: irány, hosszúság, (abszolút érték) jel.: a Speciális
Gráfalgoritmusok ismétlés ősz
 Gráfalgoritmusok ismétlés 2017. ősz Gráfok ábrázolása Egy G = (V, E) gráf ábrázolására alapvetően két módszert szoktak használni: szomszédsági listákat, illetve szomszédsági mátrixot. A G = (V, E) gráf
Gráfalgoritmusok ismétlés 2017. ősz Gráfok ábrázolása Egy G = (V, E) gráf ábrázolására alapvetően két módszert szoktak használni: szomszédsági listákat, illetve szomszédsági mátrixot. A G = (V, E) gráf
Döntéselőkészítés. VII. előadás. Döntéselőkészítés. Egyszerű Kőnig-feladat (házasság feladat)
") VII. előadás Legyenek adottak Egyszerű Kőnig-feladat (házasság feladat) I, I 2,, I i,, I m személyek és a J, J 2,, J j,, J n munkák. Azt, hogy melyik személy melyik munkához ért ( melyik munkára van kvalifikálva)
VII. előadás Legyenek adottak Egyszerű Kőnig-feladat (házasság feladat) I, I 2,, I i,, I m személyek és a J, J 2,, J j,, J n munkák. Azt, hogy melyik személy melyik munkához ért ( melyik munkára van kvalifikálva)
Termék modell. Definíció:
 Definíció: Termék modell Összetett, többfunkciós, integrált modell (számítógépes reprezentáció) amely leír egy műszaki objektumot annak különböző életfázis szakaszaiban: tervezés, gyártás, szerelés, szervízelés,
Definíció: Termék modell Összetett, többfunkciós, integrált modell (számítógépes reprezentáció) amely leír egy műszaki objektumot annak különböző életfázis szakaszaiban: tervezés, gyártás, szerelés, szervízelés,
, és tömege m 400g. . A bot B végét egy surlódás nélküli csuklóhoz rögzitve, Mihai azt észleli, hogy ha F 3N
 agina din 5. eladat (0 pont) tűkörnél fizika laborban a robotika kör tanulói egy távirányítós robot-kocsi mozgását tanulmányozzák. faltól D = 4m távolságra található kocsit a fal pontja fele irányítják
agina din 5. eladat (0 pont) tűkörnél fizika laborban a robotika kör tanulói egy távirányítós robot-kocsi mozgását tanulmányozzák. faltól D = 4m távolságra található kocsit a fal pontja fele irányítják
Görbe- és felületmodellezés. Szplájnok Felületmodellezés
 Görbe- és felületmodellezés Szplájnok Felületmodellezés Spline (szplájn) Spline: Szakaszosan, parametrikus polinomokkal leírt görbe A spline nevét arról a rugalmasan hajlítható vonalzóról kapta, melyet
Görbe- és felületmodellezés Szplájnok Felületmodellezés Spline (szplájn) Spline: Szakaszosan, parametrikus polinomokkal leírt görbe A spline nevét arról a rugalmasan hajlítható vonalzóról kapta, melyet
TÉRINFORMATIKAI ALGORITMUSOK
 Topológiai algoritmusok és adatszerkezetek TÉRINFORMATIKAI ALGORITMUSOK Cserép Máté mcserep@caesar.elte.hu 2015. november 18. EÖTVÖS LORÁND TUDOMÁNYEGYETEM INFORMATIKAI KAR BEVEZETŐ Topológia: olyan matematikai
Topológiai algoritmusok és adatszerkezetek TÉRINFORMATIKAI ALGORITMUSOK Cserép Máté mcserep@caesar.elte.hu 2015. november 18. EÖTVÖS LORÁND TUDOMÁNYEGYETEM INFORMATIKAI KAR BEVEZETŐ Topológia: olyan matematikai
Két naszád legkisebb távolsága. Az [ 1 ] gyűjteményben találtuk az alábbi feladatot és egy megoldását: 1. ábra.
![Két naszád legkisebb távolsága. Az [ 1 ] gyűjteményben találtuk az alábbi feladatot és egy megoldását: 1. ábra.](/thumbs/91/105028162.jpg "Két naszád legkisebb távolsága. Az [ 1 ] gyűjteményben találtuk az alábbi feladatot és egy megoldását: 1. ábra.") 1 Két naszád legkisebb távolsága Az [ 1 ] gyűjteményben találtuk az alábbi feladatot és egy megoldását: 1. ábra. 1. ábra A feladat Az A és B, egymástól l távolságra lévő kikötőből egyidejűleg indul két
1 Két naszád legkisebb távolsága Az [ 1 ] gyűjteményben találtuk az alábbi feladatot és egy megoldását: 1. ábra. 1. ábra A feladat Az A és B, egymástól l távolságra lévő kikötőből egyidejűleg indul két
Felvételi tematika INFORMATIKA
 Felvételi tematika INFORMATIKA 2016 FEJEZETEK 1. Természetes számok feldolgozása számjegyenként. 2. Számsorozatok feldolgozása elemenként. Egydimenziós tömbök. 3. Mátrixok feldolgozása elemenként/soronként/oszloponként.
Felvételi tematika INFORMATIKA 2016 FEJEZETEK 1. Természetes számok feldolgozása számjegyenként. 2. Számsorozatok feldolgozása elemenként. Egydimenziós tömbök. 3. Mátrixok feldolgozása elemenként/soronként/oszloponként.
12. előadás - Markov-láncok I.
 12. előadás - Markov-láncok I. 2016. november 21. 12. előadás 1 / 15 Markov-lánc - definíció Az X n, n N valószínűségi változók sorozatát diszkrét idejű sztochasztikus folyamatnak nevezzük. Legyen S R
12. előadás - Markov-láncok I. 2016. november 21. 12. előadás 1 / 15 Markov-lánc - definíció Az X n, n N valószínűségi változók sorozatát diszkrét idejű sztochasztikus folyamatnak nevezzük. Legyen S R
Matematika 11 Koordináta geometria. matematika és fizika szakos középiskolai tanár. > o < szeptember 27.
 Matematika 11 Koordináta geometria Juhász László matematika és fizika szakos középiskolai tanár > o < 2015. szeptember 27. copyright: c Juhász László Ennek a könyvnek a használatát szerzői jog védi. A
Matematika 11 Koordináta geometria Juhász László matematika és fizika szakos középiskolai tanár > o < 2015. szeptember 27. copyright: c Juhász László Ennek a könyvnek a használatát szerzői jog védi. A