Szervomotorok, és azok jeladói. Erdélyi Viktor Ferenc 2011
|
|
|
- József Borbély
- 9 évvel ezelőtt
- Látták:
Átírás
1 Szervomotorok, és azok jeladói Erdélyi Viktor Ferenc 2011

2 A szervó régebben és napjainkban: A szervók először természetesen a haditechnikában jelentek meg. Először tűzvezérlésre, és a gyalogságot navigáló berendezésekben. Manapság a szervomotorok egyre nagyobb teret hódítanak a polgári célú felhasználásban is. Szervo motorokat békés célra a például szerszámgépekben, munkagépekben, műhold követő antennáknál, modell RC autóknál, hajóknál, repülőknél, sok autofókuszos kameránál, fly-by-wire rendszereknél, merevlemezeknél alkalmaznak. Mostanság a mezőgépgyártásban is egyre komolyabb szerepet kapnak a szervomotorok, nem csak az ember munkájának megkönnyítésében, de pl a John Deere-nél foglalkoznak GPS vezérelt automata munkagépek tervezésével, ahol már teljesen Steer-by-Wire rendszerről is beszélhetünk. A szervómechanizmusok: Szervo mechanizmusnak, vagy rövidebben szervónak olyan rendszert hívunk, amely negatív visszacsatolású hibaérzékelő rendszert használ a mechanizmus megfelelő teljesítményének elérése érdekében. Ez a definíció még kiegészül azzal, hogy csak akkor nevezünk igazából szervónak egy rendszert, ha az a fent említett hiba korrekciós rendszer segítségével képes szabályozni a mechanikai pozícióját is. Ebből következő módon, noha pl. az elektromos ablakemelőben található hibajelző rendszer annak elkerülése végett, hogy odacsípjük valaminket, de a rendszer ebből nem képes az ablak pozícióját megállapítani, -ezt a feladatot mi magunk végezzük-, az elektromos ablakemelő nem nevezhető szervorendszernek. Felhasználási területei: -Pozíció szabályzás A szervo szabályzást leggyakrabban pozíószabályzásra alkalmazzuk. A szervórendszerek a negatív visszacsatolás elv alapján működnek, ahol az alapjelet hasonlítjuk a tényleges helyzethez, ebből különbséget számolunk, ezt a különbséget, mint hibajelet erősítjük, és szükség esetén átalakítjuk, ezután ennek alapján a rendszert úgy vezéreljük, hogy a hiba a lehető legkisebb legyen. -Sebesség szabályzás -Nyomaték szabályzás - 1 -

3 -egyéb Szervomotorok fajtáji(a teljesség igénye nélkül): Elöljáróban annyit, hogy az itt felsorolt motorok önmagukban NEM szervomotorok, csak megfelelő érzékelőkkel, és szabályzással válnak azzá. Fontosnak tartom viszont, hogy minden féle elektromos aktuátor működése tisztázott legyen, mivel ez fontos a szervók működésének megértéséhez. Elektromos: Egyszerű DC: DC szervókat leggyakrabban számítógépek meghajtóinál, NC szerszámgépeknél, és egyéb olyan helyeken használjuk, ahol fontos a gyors indulás, és a gyors és precíz pozícióra való állás. A DC szervók kis súlyú, kis tehetetlenségi nyomatékú armatúrával rendelkeznek, melyek gyorsan reagálnak a gerjesztőfeszültség változásaira. Az armatúrára jellemző még a kis induktivitás, így ezek a szervók igen kis időállandókkal rendelkeznek (jellemzően 0,05-1,5 msec). -Ez tovább csökkenti a motor válaszidejét az őt vezérlő jelekre. A DC szervo motorok általában kettő, négy, vagy hat pólussal rendelkeznek. Legnagyobb hibája a kommutátor szikrázása, a kommutátor kopása, és a kis pólusszámból adódó ugráló mozgás kis fordulatszámon, vagy indításkor

4 Coreless DC: A Coreless DC motorok fejlesztése az 1930-as évekre nyúlik vissza, de csak a korai 1960-as években váltak eléggé olcsóvá ahhoz, hogy széles körben felhasználhassák. Legnagyobb előnye a szimpla DC motorokkal szemben a még kisebb tehetetlensége, az alacsony mechanikai időállandó, és a nagy hatékonyság. Mivel a mag vas felhasználása nélkül készül, így a tömege jelentősen kisebb, mint vasból készült társaié, így ezek a motorok jelentősen nagyobb gyorsulást, és lassulást képesek produkálni, mint bármely más technológiájú DC motor. A vasmag megszűnésével járó egyéb előnyök mellett megszűnik a lemezekre ható mágneses erő. Ez ugyanis a konvencionális DC motoroknál a leadott nyomaték hullámzását okozza, amely csökkenti a motor teljesítményét is. A vas hiánya tehát kiküszöböli a motor ugráló mozgását, így a coreless motorok még alacsony fordulatszámoknál is simán futnak. Általában a Coreless motorokban a AlNiCo mágnesek helyén samarium-cobalt mágnesek helyezkednek el a statorban, ez is hozzájárul ahhoz, hogy a motor jóval dinamikusabban működjék. Nagyságrendileg, hogy érezzük, mennyire dinamikus a motor: egy coreless motor tipikusan rad/sec 2 gyorsulásra képes, de több mint rad/sec 2 gyorsulás is elérhető. A coreless motorokról bővebben a RC modelleknél írok

5 Brushless DC: A Brushless DC motorok hasonlítanak egy Sönt DC motorra, csak épp kifordítva. A DC motor permanens mágneseket tartalmaz a rotorján, míg a stator rész tartalmazza a három, egymástól 120 -ban elhelyezett gerjesztőtekercset, melyek a nyomaték létrehozásáért felelősek. Akár a sönt DC-nél itt is függ a nyomaték az állandó mágnesek, és a gerjesztő tekercsek által létrehozott mágneses mezejének nagyságától. Egy ilyen jellegű motornál a stator által létrehozott mágneses tér forog, mely forgásra készteti a rotorban lévő állandó mágneseket. A rotor szinkronban forog a mágneses mezővel, ezért szinkron motornak is szokták nevezni. Ez a motor viszont nem egyből váltakozó árammal van hajtva, ezért a kommutációt meg kell oldanunk. Ezt elektromosan oldják meg. Ezt hívjuk elektromosan komutált motornak. (ECM) Ez számunkra igen előnyös megoldás, hiszen míg egy kefés DC motornál nincs ráhatásunk a kommutációra, így pl. pontos szöghelyzetet sem tudunk állítani vele, csak igen nagy áttétel esetén. Ennél a megoldásnál egy az egyben tudjuk állítani a rotor helyzetét. Nem is beszélve arról, hogy mivel nincs üzemszerűen kopó alkatrész(szénkefe), így a motornak sokkal jobb az élettartama. A Brushless DC motorokról bővebben a steer-bywire rendszernél írok

6 AC: Az AC szervók általában alapvetően két-fázisú, reverzibilis, indukciós motorok, szervo működésre átalakítva. Az AC szervo motorokat főleg olyan helyen alkalmazzuk, ahol fontos, hogy a motor, gyors, nagy pontosságú karakterisztikákkal rendelkezzék. Hogy elérjék ezen karakterisztikákat, az AC szervo motoroknak kis átmérőjű, nagy ellenállású rotorjaik vannak. A kis átmérő a kis tehetetlenségi nyomatékot biztosít, a gyors indulás, megállás, irányváltás érdekében. A magas ellenállásérték pedig majdnem teljesen lineáris sebesség-nyomaték karakterisztikát eredményez. Ez növeli a motor pontosságát

7 Egy egyszerű szervoszabályzás vázlata: Szervók visszacsatolási rendszere: A szervók visszacsatolást használnak annak érdekében, hogy információt nyerjünk az aktuális sebességről, és helyzetről. Ezt sokféle berendezéssel oldhatjuk meg, példának említeném az analóg tachométert, a digitális tachométert (más néven optikai encoder), vagy akár a resolvert. A következő sorokban mindegyikről ejtenék néhány szót, hogy a működésük alapelve ismertté váljon előttünk
, vagy akár a resolvert.")
8 -Analóg Tachométerek: Az analóg tachométerek miniatűr motorokra hasonlítanak, melyeket azonban generátoros üzemben működtetünk. Ezek a kis motorok nem alkalmasak erő kifejtésére, mivel a huzalozása igen finom, így nem bírja a magas áramokat. Ez a szerkezet arra van kihegyezve, hogy a tengelyén behajtva a fordulatszámmal arányos feszültséget hozzon létre a sarkain. Minél magasabb a tengelyre kapcsolt fordulatszám, annál magasabb a kimeneti feszültség. Ezen felül az analóg (, vagy DC) tachométerek kimeneti jeléből következtethetünk a forgás irányára is, hiszen, ha az egyik irányban forgatjuk, a kimeneti feszültség +, ha a másik irányba hajtjuk be, akkor a pólusain mért feszültség - lesz. Előnye, hogy igen egyszerű megoldás fordulatszámmérésre, csak kimeneti feszültség grádiensét kell ismernünk [V/Krpm], hogy a motor két kivezetésén mért feszültségből következtethessünk a fordulatszámra. Pl: n=3600 1/min Grad= 2,5 V/Krpm => U= 3,6*2,5= 9V Hátránya: A valóságban a DC tachométer karakterisztikája nem lineáris, és a gyártási pontatlanságokból adódóan a készülék nem mindig rendelkezik azzal a feszültségsebesség grádienssel, ami gyárilag meg van adva, így nagyon pontos mérésekhez nem használható

9 -Digitális tachométerek: A digitális tachométerek (más néven optoencoderek, vagy simán encoderek) mechanikai- elektromos átalakító eszközök. Az encoder tengelyét forgatva a kimeneten az elmozdulással (szöggel) arányos jel jelenik meg. Ez lehet négyszögjel, vagy szinuszos jel, esetleg abszolút pozícióra vonatkozó jel. Kétféle encodert különböztetünk meg. Az abszolút és az inkrementális típust. -Abszolút: Ez a megoldás a tengely teljes 360 -os tartományban minden szöghelyzethez egy saját címet rendel. Ez a megoldás vagy kefés vagy érintésmentes kivitelben hozzáférhető, attól függően, hogy milyen felbontású encoderre van szükségünk. A kefés megoldás egy speciális érintkezőt használ az encoder-tárcsa felületén lévő elektromos címek leolvasására, míg az érintésmentes megoldás fotoelektromos érzékelőt alkalmaz a kódtárcsa helyzetének leolvasásához. Ezenfelül a kódtárcsa tartalmaz egy beépített memóriát is, így például egy nem várt áramszünet esetén nem vesznek el a pozícióadatok, így nem szükséges a motort referenciapontra állítani, ahhoz, hogy folytathassuk vele a munkát

10 -Inkrementális: Az inkrementális jeladó vagy szinuszos, vagy négyszögjeleket generál a tengelye elfordítására. Az elfordulás adatokat ezen adatokból számíthatjuk. A tárcsa úgy készül, hogy átlátszatlan csíkokat helyeznek el egy átlátszó tárcsán (vagy fordítva). A fény az átlátszó területeken átjut a tárcsán, egyenesen egy fotoérzékelőre, melynek a kimenetén ennek hatására szinuszos jel keletkezik. Elektronikus feldolgozáshoz ezt a jelet négyszögjellé alakítják. Amit fontos tudnunk a készülék használatához: -Vonalak száma: ez az impulzusok száma fordulatonként, gyakorlatilag az encoder felbontása. A felbontástól függ a pozicionálás pontossága. -Kimeneti jel: a fotoszenzor kimeneti jele lehet szinuszos, vagy négyszögjel. -Csatornák száma: lehet egy vagy kétcsatornás. A kétcsatornás megoldás lehetővé teszi a forgás irányának meghatározását, plusz egy úgy nevezett zéró index impulzus felhasználásával lehetőség nyílik a home pozíció meghatározására

11 Egy tipikus felhasználási példa az inkrementális (digitális) encoder felhasználására: Egy bemeneti jellel meghatározzuk a kívánt pozíciót. Ez határozza meg, hogy a motort milyen helyzetbe kell állítanunk. Amikor a motor gyorsul, az enkóderből növekvő sebességgel kapjuk az impulzusokat, egészen addig, míg a motor konstans fordulatszámát el nem érjük. A futási periódus alatt az encoderből érkező jelek konstans periódusidővel érkeznek, ebből közvetlenül meghatározható a motor fordulatszáma. Eközben a számláló folyamatosan számolja a beérkező impulzusokat, melyekből a motor aktuális helyzetére lehet következtetni. Mikor a kívánt érék közelébe érünk, a motor csökkenteni kezdi a fordulatszámát a túlfutás elkerülése érdekében. Mikor 1-2 impulzus távolságra érünk a kívánt pozíciótól a motort megállásra utasítjuk. A motor a kívánt pozícióba kerül. -Resolverek: A resolverek kívülről kis motoroknak tűnnek, de lényegében ezek kis forgó transzformátorok, úgy tervezve, hogy a rotor és stator koefficienséből következtetni lehessen a tengely szöghelyzetére. Két, egymástól 90 -ra lévő laminált vasmagra tekercselt sztátortekercs, és szintén laminált vasmagra tekercselt rotortekercs alkotja. Ha a rotor tekercsét egy referencia váltóárammal gerjesztjük, a két sztátortekercsben szintén váltóáram indukálódik, méghozzá a rotor szögének szinuszával vagy coszinuszával összefüggő amplitúdóval. A rotor tekercs gerjesztése csúszógyűrűk, és kefék segítségével történik, bár manapság a nagyobb sebességek elérése érdekében ez induktív megoldással történik. Ezeket kefe nélküli resolvereknek nevezzük. Ezek a brushless alkalmazások körülbelül 10x nagyobb élettartammal bírnak, (mivel a kefés megoldás igen érzékeny a vibrációra és koszra), ezért főként ipari területen alkalmazzák. Mint a leírásból kitűnik, ez egy analóg megoldás, amit ha digitális rendszerrel használunk, mindenképp el kell látni egy speciális A/D konverterrel, melyet a szakmában Resolver-to- Digital átalakítónak azaz R/D-nek neveznek. A forgalomban lévő resolverek gyárilag tartalmazzák ezt az átalakítót

12 A resolver működése Szervo motorok használata szerszámgépeknél: Régebben a szerszámgépeknél pl CNC gépeknél léptetőmotorokat alkalmaztak, melyeknek nagy hátrányuk volt az álló helyzetben magas hődisszipáció, és a lassú mozgás(kb 500 1/min). Ezen kívül a vezérlésük is meglehetősen bonyolult volt, hiszen, ha sokpólusú léptető motorról volt szó, az irányváltás már komolyabb programozási feladat volt. Ellehetetlenítette még a léptetőmotorok használatát az a tény, hogy léptetőmotorok esetében a kisebb teljesítményű motorok voltak gazdaságosak, a nagyteljesítményű stepperek már igen drágák voltak, és igen nagyok. A léptetőmotorok alkalmazásának egy nagy előnye volt, mégpedig az, hogy nem kellett visszacsatolást helyezni a körbe, mivel a léptetőmotort elég vezérelni, és jellegéből adódóan a kívánt (a motor felbontásától függő) helyzetbe áll. Ebben rejlett a további hátránya is, pl ha a gép nem tudott a kívánt helyzetbe állni, arról nem volt semmiféle visszajelzés. Ilyen gépek voltak pl. az EMCO CNC-k

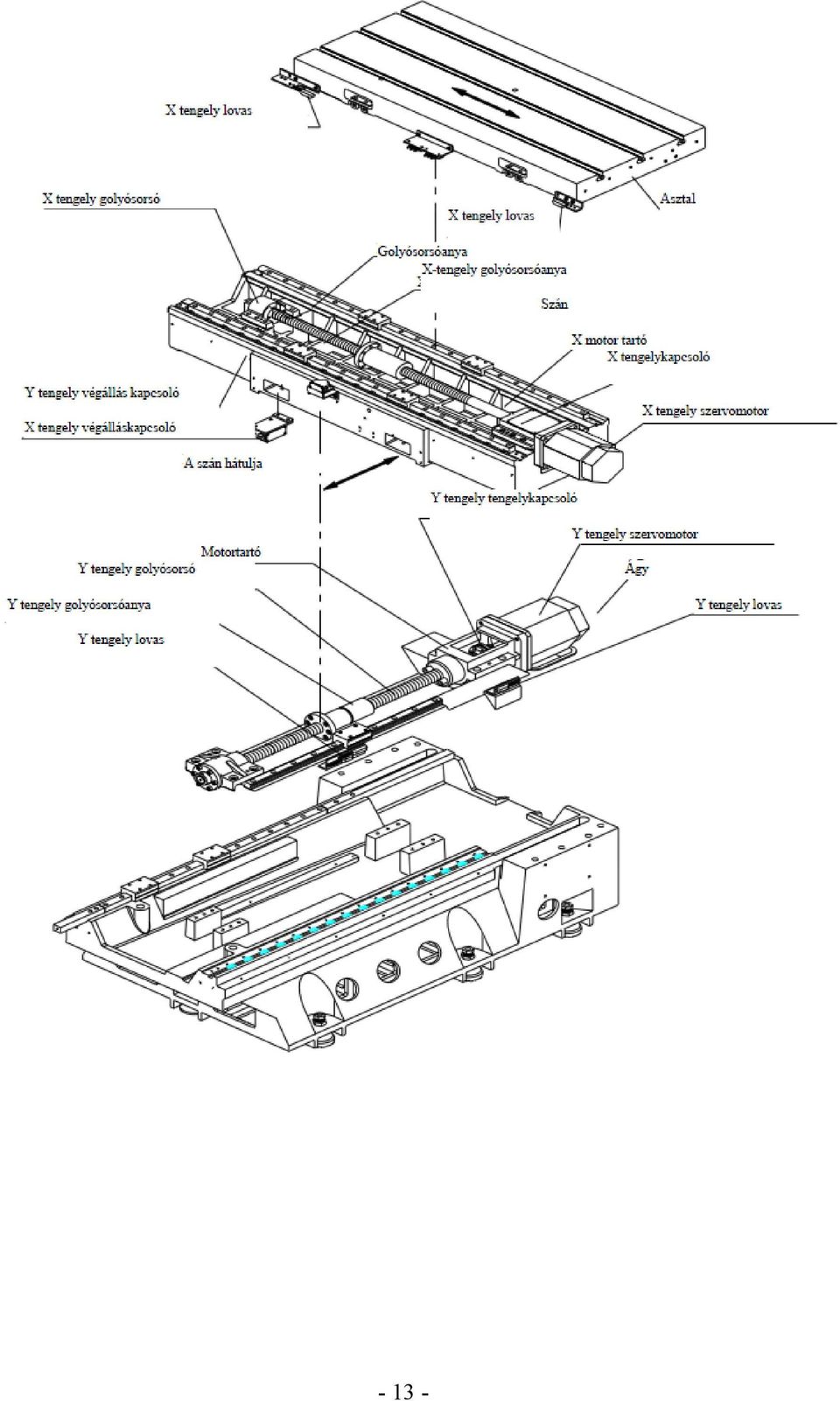
13 A mai világban igen fontos a precizitás, és emellett fontos a költséghatékonyság, továbbá a megmunkálás időtartama. Ezeket a növekvő igényeket az elavult léptetőmotoros technológiával már nem lehetett kielégíteni. Ekkor jött a képbe a szervóhajtás. Mint láthattuk a motorok leírásánál ezek a megoldások már jócskán meghaladják a léptetőmotorok elérhető sebességét, arról nem is beszélve, hogy a pontosságuk gyakorlatilag szinte csak a visszacsatolási rendszer, és a vezérlés minőségén múlik. Manapság a szerszámgépek hajtására jobbára AC szervo motorokat használnak. A szánok mozgatása szervomotor segítségével, golyósorsón keresztül történik. Mivel a motor helyzetét akár szögmásodpercre pontosan be lehet állítani, igen pontos megmunkálások válnak lehetővé. Ehhez fontos még a megfelelően kotyogásmentesített orsó-szán kapcsolat is. Az elmozdulást a motor elfordulása és a golyósorsó menetemelkedésének szorzatából kaphatjuk meg. A szerszámgépeknél nem egyszer fontos tényező, hogy a megmunkálás folytonos megmunkáló-sebességgel történjék, illetve, folytonos nyomatékkal. Ezen probléma megoldására ismét kiváló megoldást nyújtanak a szervo motorok

14 - 13 -
15 Szervomotorok használata steer-by-wire rendszernél: A szervokormányokkal szemben támasztott követelmények: - ne legyen észrevehető holtjátéka, és ne legyen időkésedelme - ne legyen önzáró, de a kerekekre ható ütéseket nagyon letompítva közvetítse a kormánykerék felé - álló járműben is működjön - egyenes haladáskor ne segítsen, hogy a vezető "érezze" a kormányt - kormányzáskor fejtsen ki a kormánykerékre a kikormányzottság mértékével arányosan növekvő, de természetesen mérsékelt nagyságú reakció-nyomatékot, szintén azért, hogy a vezető "érezze" a kormányt. - a jármű akkor is kormányozható legyen (kézi erővel), ha meghibásodás miatt a szervo nem működik (egészen nagy tonnás - járművek esetén ettől eltekintenek, ezeket ugyanis puszta kézierővel úgysem lehet kormányozni) Ezeknek a követelményeknek kell eleget tenni a steer-by-wire rendszereknél is, melyeket közúti közlekedésben nem igazán lehet megvalósítani a hatályos jogszabályok miatt. A fent említett rendszert főként földmunkagépeken, ill. mezőgazdasági gépeken (traktorokon, kombájnokon) alkalmazhatnánk, mint a John Deere cég innovációjánál is tették, ahol a munkagépet GPS alapján számítógép kormányozza, annak érdekében, hogy a föld megmunkálása közben ne legyenek kihagyott ill. átfedett területek, így hatékonyabbá téve a megmunkálást. Természetesen, ehhez nincs szükség kormánykerékre, de mivel a számítógép sem láthat mindent, ezért a gépeket felszerelik egy magasabb prioritású kormánykerékkel, amelynek nincs kapcsolata ténylegesen a kormányművel. A Steer-by-Wire rendszer továbbá lehetővé tenné, hogy a menetstabilizátor akár a kormányzásban is aktívan résztvehessen, illetve hogy a haladási sebességnek megfelelően alakuljon a kormányzás érzékenysége. A kormánykerék megfelelő megoldások révén teljesen olyan érzetet ad, mintha mechanikus összeköttetésben volna a kormányzott kerekekkel. Ezt úgy oldják meg, hogy a kormánykerék tengelyéhez egy force feedback szervó kapcsolódik, mely hasonló a modern játékkontollerekben lévőhöz
, ha meghibásodás miatt a szervo nem működik (egészen nagy - 20.")
16 Mint az ábrából is látható, a rendszer megvalósításához két szervomotor szükséges. Egy amely ténylegesen végzi a kormánymű működtetését, és egy amely visszajelzést ad nekünk. Látható, hogy itt nem elégséges szimplán a sebességet, és szöghelyzetet figyelni, beállítani, visszacsatolni, hanem lényeges hogy a nyomaték is kezelve legyen. Erre megoldást kínálhat az a nem túl precíz metódus, hogy a vezérelt motor áramfelvételéből következtetünk a leadott nyomatékra. Természetesen, ha egzaktabb megoldásra van szükségünk, nyomatékmérő szenzorokkal is elláthatjuk a rendszerünket, mely ettől költségesebb, bonyolultabb, de megbízhatóbb lesz

17 Ilyen jellegű megoldást mutatott be Kiss János is Agromechatronika tárgy keretein belül, ahol a feedback szervó egy háromfázisú kefenélküli szervo motor volt. Ennek a motornak egy pár képen keresztül mutatnám be a működését. A motor működtetéséhez szükségünk van a rotor aktuális helyzetére, mivel elektronikus kommutációt hajtunk végre. Ezt Jánossal Hall-kommutációval gondoltuk megvalósítani, ami abból állt volna, -mint, ahogy a nevéből is kitűnik- hogy Hall-effekt szenzorok segítségével érzékeljük az állandó mágneses rotor helyzetét és ennek megfelelően állítjuk a gerjesztőtekercsekre kapcsolt áramot

18 A diagramokból látható hogy így a motort 60 -onként lehet mozgatni. Ezért ha PWM vezérléssel ezeket a digitális jeleket kvázi szinuszossá tesszük, a motorunkat egészen kis felbontásban állíthatjuk

19 Szervomotorok használata RC modelleknél: Valószínűleg a legtöbb ember ezzel a szervóval kerül közelebbi ismeretségbe. Ennél a rendszernél jóval egyszerűbb a visszacsatolás, hiszen a visszacsatolást egy potenciométer végzi, mely az elfordulással arányosan változtatja az ellenállását, így ha nem is pontosan, de következtetni lehet a motor szöghelyzetére. A motor lehet egy kefés DC motor, de a következő példában a motoroknál említett káros ugráló mozgást kiküszöbölendő, egy coreless motor fog szerepelni. A motor fordulatszámát PWM (Pulse Width Modulate) vezérléssel végezzük. További opció, hogyha nem kielégítő a potméter pontossága, azt lecseréljük forgó mágneses jeladóra. Ez nagyobb pontosságot biztosít, de jóval megbonyolítja a feldolgozást

20 Mivel a motor és a tényleges kihajtótengely közötti áttétel rendszerint igen nagy (1/250-1/300) így a motor szabályzása lehet valamelyest nagyvonalú, főleg, ha potmétert használunk szöghelyzetjeladóként. A motort H-híddal vezéreljük PWM-el. A PWM kitöltési tényezője szabja meg a motor teljesítményét. Lényegében a PWM arról szól, hogy a motort olyan sebességgel kapcsoljuk ki/be, hogy azt a motor követni nem tudja, hanem kiintegrálja. A ki és bekapcsolt szakaszok hossza szabja meg a teljesítmény százalékos értékét. Ha pl 50%-ban be 50%ban kikapcsolva van a motor, látható, hogy 50%-os teljesítményen jár a motor. Ez 5V-os tápfeszültség esetén annyit tesz, mintha a motorra 2,5V-ot kapcsolnánk. A valóságban természetesen nem ilyen egyszerű a probléma megoldása, ízelítőnek itt van tehát egy valós, H-híd P, és N csatornás FET -ekből, valamint FET -vezérlő áramkörökből összeállítva. Az alábbi képen a motorral párhuzamosan kötött kondenzátorok a szikraelnyelést szolgálják, az EMF kivezetések segítségével mérhető az Electro Motive Force, melyből a motor fordulatszámára következtethetünk. A VIR kimeneten mért értékből következtetünk a motor által felvett áram nagyságára, amiből pedig a motor nyomatéka számítható (jelleggörbe alapján)

21 Fontos megemlíteni, hogy EMF-et és motoráramot csak beállt szakaszban szabad végezni, akkor, mikor az esetleges felfutó, ill. lefutó szakaszok befejeződtek. EMF-et a PWM passzív szakaszában, annak is a közepén, míg motoráramot a PWM aktív szakaszának közepén célszerű mérni, így elkerülve a tranziensek mérését és az ebből adódó hibás működést
22 Irodalomjegyzék: Dr. Soumelidis Alexandros A beágyazott számítástechnika alkalmazása mérési és irányítási rendszerek megvalósításában - hobby szervo EmL-510 függőleges CNC megmunkáló központ gépkönyv - szervo a szerszámgépekben BALDOR ELECTRIC COMPANY - Servo Control Facts - encoderek Takács Ernő - Szerszámgéptervezés segédlet M. B. Immerzeel - Servo Systemen - szervo rendszerek szabályzása, működése -motorokról képek, rövid leírás -coreless motorok -szervókról általában - DC stepper motorok -AC szervók -DC motorok -Brushless DC -encoderek -resolverek -kormányszervók
Érzékelők és beavatkozók
 Érzékelők és beavatkozók DC motorok 1. rész egyetemi docens - 1 - Főbb típusok: Elektromos motorok Egyenáramú motor DC motor. Kefenélküli egyenáramú motor BLDC motor. Indukciós motor AC motor aszinkron
Érzékelők és beavatkozók DC motorok 1. rész egyetemi docens - 1 - Főbb típusok: Elektromos motorok Egyenáramú motor DC motor. Kefenélküli egyenáramú motor BLDC motor. Indukciós motor AC motor aszinkron
Alapfogalmak, osztályozás
 VILLAMOS GÉPEK Alapfogalmak, osztályozás Gépek: szerkezetek, amelyek energia felhasználása árán munkát végeznek, vagy a felhasznált energiát átalakítják más jellegű energiává Működési elv: indukált áram
VILLAMOS GÉPEK Alapfogalmak, osztályozás Gépek: szerkezetek, amelyek energia felhasználása árán munkát végeznek, vagy a felhasznált energiát átalakítják más jellegű energiává Működési elv: indukált áram
Minden mérésre vonatkozó minimumkérdések
 Minden mérésre vonatkozó minimumkérdések 1) Definiálja a rendszeres hibát 2) Definiálja a véletlen hibát 3) Definiálja az abszolút hibát 4) Definiálja a relatív hibát 5) Hogyan lehet az abszolút-, és a
Minden mérésre vonatkozó minimumkérdések 1) Definiálja a rendszeres hibát 2) Definiálja a véletlen hibát 3) Definiálja az abszolút hibát 4) Definiálja a relatív hibát 5) Hogyan lehet az abszolút-, és a
8. Laboratóriumi gyakorlat INKREMENTÁLIS ADÓ
 8. Laboratóriumi gyakorlat INKREMENTÁLIS ADÓ 1. A gyakorlat célja: Az inkrementális adók működésének megismerése. Számítások és szoftverfejlesztés az inkrementális adók katalógusadatainak feldolgozására
8. Laboratóriumi gyakorlat INKREMENTÁLIS ADÓ 1. A gyakorlat célja: Az inkrementális adók működésének megismerése. Számítások és szoftverfejlesztés az inkrementális adók katalógusadatainak feldolgozására
DC motor= egyenáramú motor, villanymotor vezérlése micro:bittel:
 + DC motor= egyenáramú motor, villanymotor vezérlése micro:bittel: A motor egyfajta eszköz, amely az elektromágneses indukció szerint a villamos energiát kinetikus energiává alakíthatja át. Sokféle motor
+ DC motor= egyenáramú motor, villanymotor vezérlése micro:bittel: A motor egyfajta eszköz, amely az elektromágneses indukció szerint a villamos energiát kinetikus energiává alakíthatja át. Sokféle motor
Mechatronika, Optika és Gépészeti Informatika Tanszék MOTOR - BOARD
 echatronika, Optika és Gépészeti Informatika Tanszék OTOR - BORD I. Elméleti alapok a felkészüléshez 1. vizsgált berendezés mérést a HPS System Technik (www.hps-systemtechnik.com) rendszereszközök segítségével
echatronika, Optika és Gépészeti Informatika Tanszék OTOR - BORD I. Elméleti alapok a felkészüléshez 1. vizsgált berendezés mérést a HPS System Technik (www.hps-systemtechnik.com) rendszereszközök segítségével
Használható segédeszköz: szabványok, táblázatok, gépkönyvek, számológép
 A 27/2012 (VIII. 27.) NGM rendelet (12/2013 (III.28) NGM rendelet által módosított) szakmai és vizsgakövetelménye alapján. Szakképesítés, azonosító száma és megnevezése 34 522 02 Elektromos gép- és készülékszerelő
A 27/2012 (VIII. 27.) NGM rendelet (12/2013 (III.28) NGM rendelet által módosított) szakmai és vizsgakövetelménye alapján. Szakképesítés, azonosító száma és megnevezése 34 522 02 Elektromos gép- és készülékszerelő
Forgójeladók. Inkrementális forgójeladók. Optikai inkrementális forgójeladók
 Forgójeladók A forgójeladó (enkóder, kódadó, impulzusadó, forgóadó, pozíció jeladó, szöghelyzet adó, szöghelyzet érzékelő, szögkódoló) alkalmas a forgástengely helyzetének, fordulatszámának és forgásirányának
Forgójeladók A forgójeladó (enkóder, kódadó, impulzusadó, forgóadó, pozíció jeladó, szöghelyzet adó, szöghelyzet érzékelő, szögkódoló) alkalmas a forgástengely helyzetének, fordulatszámának és forgásirányának
Forgójeladók (kép - Heidenhain)
") Forgójeladók A forgójeladók választékában számos gyártó különböző szempontoknak megfelelő terméke megtalálható, ezért a felhasználónak a megfelelő típus kiválasztása néha nem kis nehézséget okoz. Ezen
Forgójeladók A forgójeladók választékában számos gyártó különböző szempontoknak megfelelő terméke megtalálható, ezért a felhasználónak a megfelelő típus kiválasztása néha nem kis nehézséget okoz. Ezen
Robotika. Relatív helymeghatározás Odometria
 Robotika Relatív helymeghatározás Odometria Differenciális hajtás c m =πd n /nc e c m D n C e n = hány mm-t tesz meg a robot egy jeladó impulzusra = névleges kerék átmérő = jeladó fölbontása (impulzus/ford.)
Robotika Relatív helymeghatározás Odometria Differenciális hajtás c m =πd n /nc e c m D n C e n = hány mm-t tesz meg a robot egy jeladó impulzusra = névleges kerék átmérő = jeladó fölbontása (impulzus/ford.)
ÉRZÉKELŐK ÉS BEAVATKOZÓK II. 2. DC MOTOROK BEVEZETÉS ÉS STATIKUS MODELLEZÉS
 ÉRZÉKELŐK ÉS EVTKOZÓK II. 2. DC MOTOROK EVEZETÉS ÉS STTIKUS MODELLEZÉS Dr. Soumelidis lexandros 2019.02.13. ME KÖZLEKEDÉSMÉRNÖKI ÉS JÁRMŰMÉRNÖKI KR 32708-2/2017/INTFIN SZÁMÚ EMMI ÁLTL TÁMOGTOTT TNNYG Elektromos
ÉRZÉKELŐK ÉS EVTKOZÓK II. 2. DC MOTOROK EVEZETÉS ÉS STTIKUS MODELLEZÉS Dr. Soumelidis lexandros 2019.02.13. ME KÖZLEKEDÉSMÉRNÖKI ÉS JÁRMŰMÉRNÖKI KR 32708-2/2017/INTFIN SZÁMÚ EMMI ÁLTL TÁMOGTOTT TNNYG Elektromos
4. FEJEZET MOTORHAJTÁSOK
 Tantárgy: TELJESÍTMÉNYELEKTRONIKA Tanár: Dr. Burány Nándor Tanársegéd: Mr. Divéki Szabolcs 5. félév Óraszám: 2+2 1 4. FEJEZET MOTORHAJTÁSOK Széles skála: o W...MW, o precíz pozícionálás...goromba sebességvezérlés.
Tantárgy: TELJESÍTMÉNYELEKTRONIKA Tanár: Dr. Burány Nándor Tanársegéd: Mr. Divéki Szabolcs 5. félév Óraszám: 2+2 1 4. FEJEZET MOTORHAJTÁSOK Széles skála: o W...MW, o precíz pozícionálás...goromba sebességvezérlés.
Elektromechanika. 4. mérés. Háromfázisú aszinkron motor vizsgálata. 1. Rajzolja fel és értelmezze az aszinkron gép helyettesítő kapcsolási vázlatát.
 Elektromechanika 4. mérés Háromfázisú aszinkron motor vizsgálata 1. Rajzolja fel és értelmezze az aszinkron gép helyettesítő kapcsolási vázlatát. U 1 az állórész fázisfeszültségének vektora; I 1 az állórész
Elektromechanika 4. mérés Háromfázisú aszinkron motor vizsgálata 1. Rajzolja fel és értelmezze az aszinkron gép helyettesítő kapcsolási vázlatát. U 1 az állórész fázisfeszültségének vektora; I 1 az állórész
TB6600 V1 Léptetőmotor vezérlő
 TB6600 V1 Léptetőmotor vezérlő Mikrolépés lehetősége: 1, 1/2, 1/4, 1/8, 1/16. A vezérlő egy motor meghajtására képes 0,5-4,5A között állítható motoráram Tápellátás: 12-45V közötti feszültséget igényel
TB6600 V1 Léptetőmotor vezérlő Mikrolépés lehetősége: 1, 1/2, 1/4, 1/8, 1/16. A vezérlő egy motor meghajtására képes 0,5-4,5A között állítható motoráram Tápellátás: 12-45V közötti feszültséget igényel
Elmozdulás mérés BELEON KRISZTIÁN BELEON KRISTIÁN - MÉRÉSELMÉLET - ELMOZDULÁSMÉRÉS 1
 Elmozdulás mérés BELEON KRISZTIÁN 2016.11.17. 2016.11.17. BELEON KRISTIÁN - MÉRÉSELMÉLET - ELMOZDULÁSMÉRÉS 1 Mérési eljárás szerint Rezisztív Induktív Kapacitív Optikai Mágneses 2016.11.17. BELEON KRISTIÁN
Elmozdulás mérés BELEON KRISZTIÁN 2016.11.17. 2016.11.17. BELEON KRISTIÁN - MÉRÉSELMÉLET - ELMOZDULÁSMÉRÉS 1 Mérési eljárás szerint Rezisztív Induktív Kapacitív Optikai Mágneses 2016.11.17. BELEON KRISTIÁN
Érzékelők és beavatkozók
 Érzékelők és beavatkozók DC motorok 3. rész egyetemi docens - 1 - DC motorvezérlés H-híd: +V r Motor mozgatás előre Motor mozgatás hátra Fékezés Szabadonfutás a vezérlés függvényében UL LL + Ø - UR LR
Érzékelők és beavatkozók DC motorok 3. rész egyetemi docens - 1 - DC motorvezérlés H-híd: +V r Motor mozgatás előre Motor mozgatás hátra Fékezés Szabadonfutás a vezérlés függvényében UL LL + Ø - UR LR
CNC programozás. Alap ismeretek. Készített: Hatos István
 CNC programozás Alap ismeretek Készített: Hatos István Mit jelent a CNC? A számjegyvezérlés (Numerical Control), a vezérlés a parancsokat az alkatrészprogramból ismeri. Az alkatrészprogram alfanumerikus
CNC programozás Alap ismeretek Készített: Hatos István Mit jelent a CNC? A számjegyvezérlés (Numerical Control), a vezérlés a parancsokat az alkatrészprogramból ismeri. Az alkatrészprogram alfanumerikus
E-Laboratórium 2 A léptetőmotorok alkalmazásai Elméleti leírás
 E-Laboratórium 2 A léptetőmotorok alkalmazásai Elméleti leírás 1. Bevezető A szinkronmotorok csoportjában egy külön helyet a léptetőmotor foglal el, aminek a diszkrét működését, vagyis a léptetést, egy
E-Laboratórium 2 A léptetőmotorok alkalmazásai Elméleti leírás 1. Bevezető A szinkronmotorok csoportjában egy külön helyet a léptetőmotor foglal el, aminek a diszkrét működését, vagyis a léptetést, egy
A II. kategória Fizika OKTV mérési feladatainak megoldása
 Nyomaték (x 0 Nm) O k t a t á si Hivatal A II. kategória Fizika OKTV mérési feladatainak megoldása./ A mágnes-gyűrűket a feladatban meghatározott sorrendbe és helyre rögzítve az alábbi táblázatban feltüntetett
Nyomaték (x 0 Nm) O k t a t á si Hivatal A II. kategória Fizika OKTV mérési feladatainak megoldása./ A mágnes-gyűrűket a feladatban meghatározott sorrendbe és helyre rögzítve az alábbi táblázatban feltüntetett
Elektromechanikai rendszerek szimulációja
 Kandó Polytechnic of Technology Institute of Informatics Kóré László Elektromechanikai rendszerek szimulációja I Budapest 1997 Tartalom 1.MINTAPÉLDÁK...2 1.1 IDEÁLIS EGYENÁRAMÚ MOTOR FESZÜLTSÉG-SZÖGSEBESSÉG
Kandó Polytechnic of Technology Institute of Informatics Kóré László Elektromechanikai rendszerek szimulációja I Budapest 1997 Tartalom 1.MINTAPÉLDÁK...2 1.1 IDEÁLIS EGYENÁRAMÚ MOTOR FESZÜLTSÉG-SZÖGSEBESSÉG
2000 Szentendre, Bükköspart 74 WWW.MEVISOR.HU. MeviMR 3XC magnetorezisztív járműérzékelő szenzor
 MeviMR 3XC Magnetorezisztív járműérzékelő szenzor MeviMR3XC járműérzékelő szenzor - 3 dimenzióban érzékeli a közelében megjelenő vastömeget. - Könnyű telepíthetőség. Nincs szükség az aszfalt felvágására,
MeviMR 3XC Magnetorezisztív járműérzékelő szenzor MeviMR3XC járműérzékelő szenzor - 3 dimenzióban érzékeli a közelében megjelenő vastömeget. - Könnyű telepíthetőség. Nincs szükség az aszfalt felvágására,
4. Mérés Szinkron Generátor
 4. Mérés Szinkron Generátor Elsődleges üzemállaot szerint beszélhetünk szinkron generátorról és szinkron motorról, attól függően, hogy a szinkron gé elsődlegesen generátoros vagy motoros üzemállaotban
4. Mérés Szinkron Generátor Elsődleges üzemállaot szerint beszélhetünk szinkron generátorról és szinkron motorról, attól függően, hogy a szinkron gé elsődlegesen generátoros vagy motoros üzemállaotban
Az aszinkron és a szinkron gépek külső mágnesének vasmagja, -amelyik általában az
 8 FORGÓMEZŐS GÉPEK. Az aszinkron és a szinkron géek külső mágnesének vasmagja, -amelyik általában az állórész,- hengergyűrű alakú. A D átmérőjű belső felületén tengelyirányban hornyokat mélyítenek, és
8 FORGÓMEZŐS GÉPEK. Az aszinkron és a szinkron géek külső mágnesének vasmagja, -amelyik általában az állórész,- hengergyűrű alakú. A D átmérőjű belső felületén tengelyirányban hornyokat mélyítenek, és
7. Laboratóriumi gyakorlat KIS ELMOZDULÁSOK MÉRÉSE KAPACITÍV ÉS INDUKTÍV MÓDSZERREL
 7. Laboratóriumi gyakorlat KIS ELMOZDULÁSOK MÉRÉSE KAPACITÍV ÉS INDUKTÍV MÓDSZERREL 1. A gyakorlat célja Kis elmozulások (.1mm 1cm) mérésének bemutatása egyszerű felépítésű érzékkőkkel. Kapacitív és inuktív
7. Laboratóriumi gyakorlat KIS ELMOZDULÁSOK MÉRÉSE KAPACITÍV ÉS INDUKTÍV MÓDSZERREL 1. A gyakorlat célja Kis elmozulások (.1mm 1cm) mérésének bemutatása egyszerű felépítésű érzékkőkkel. Kapacitív és inuktív
Abszolút forgójeladók
 Abszolút forgójeladók Az inkrementális forgójeladók legnagyobb hátránya, hogy az elmozdulás nagyságát, vagy pozíció meghatározását szolgáló kimenő impulzusokat egy külső számlálóval kell számolni és tárolni.
Abszolút forgójeladók Az inkrementális forgójeladók legnagyobb hátránya, hogy az elmozdulás nagyságát, vagy pozíció meghatározását szolgáló kimenő impulzusokat egy külső számlálóval kell számolni és tárolni.
Teljesítményelektronika szabályozása. Összeállította dr. Blága Csaba egyetemi docens
 Teljesítményelektronika szabályozása Összeállította dr. Blága Csaba egyetemi docens Szakirodalom 1. Ferenczi Ödön, Teljesítményszabályozó áramkörök, Műszaki Könyvkiadó, Budapest, 1981. 2. Ipsits Imre,
Teljesítményelektronika szabályozása Összeállította dr. Blága Csaba egyetemi docens Szakirodalom 1. Ferenczi Ödön, Teljesítményszabályozó áramkörök, Műszaki Könyvkiadó, Budapest, 1981. 2. Ipsits Imre,
LI 2 W = Induktív tekercsek és transzformátorok
 Induktív tekercsek és transzformátorok A tekercsek olyan elektronikai alkatrészek, amelyek mágneses terükben jelentős elektromos energiát képesek felhalmozni. A mágneses tér a tekercset alkotó vezetéken
Induktív tekercsek és transzformátorok A tekercsek olyan elektronikai alkatrészek, amelyek mágneses terükben jelentős elektromos energiát képesek felhalmozni. A mágneses tér a tekercset alkotó vezetéken
A 27/2012 (VIII. 27.) NGM rendelet szakmai és vizsgakövetelménye alapján.
 NGM rendelet szakmai és vizsgakövetelménye alapján.") A 27/202 (VIII. 27.) NGM rendelet szakmai és vizsgakövetelménye alapján. Szakképesítés, azonosító száma és megnevezése 54 523 04 Mechatronikai technikus Tájékoztató A vizsgázó az első lapra írja fel a
A 27/202 (VIII. 27.) NGM rendelet szakmai és vizsgakövetelménye alapján. Szakképesítés, azonosító száma és megnevezése 54 523 04 Mechatronikai technikus Tájékoztató A vizsgázó az első lapra írja fel a
A/D és D/A konverterek vezérlése számítógéppel
 11. Laboratóriumi gyakorlat A/D és D/A konverterek vezérlése számítógéppel 1. A gyakorlat célja: Az ADC0804 és a DAC08 konverterek ismertetése, bekötése, néhány felhasználási lehetőség tanulmányozása,
11. Laboratóriumi gyakorlat A/D és D/A konverterek vezérlése számítógéppel 1. A gyakorlat célja: Az ADC0804 és a DAC08 konverterek ismertetése, bekötése, néhány felhasználási lehetőség tanulmányozása,
Elektronika 2. TFBE1302
 Elektronika 2. TFBE1302 Mérőműszerek Analóg elektronika Feszültség és áram mérése Feszültségmérő: V U R 1 I 1 igen nagy belső ellenállású mérőműszer párhuzamosan kapcsolandó a mérendő alkatrésszel R 3
Elektronika 2. TFBE1302 Mérőműszerek Analóg elektronika Feszültség és áram mérése Feszültségmérő: V U R 1 I 1 igen nagy belső ellenállású mérőműszer párhuzamosan kapcsolandó a mérendő alkatrésszel R 3
DRL üzembehelyezési segédlet
 Dokumentum azonosító: PP-17-20900 Budapest, 2015. augusztus Verzió Dátum Módosítás Összeállította Verzió 1.0 2014. 11.25. első verzió Seida Zoltán Hozzáadva: Verzió 1.1 2015. 08.17. 7 Éles tesztek fejezetben:
Dokumentum azonosító: PP-17-20900 Budapest, 2015. augusztus Verzió Dátum Módosítás Összeállította Verzió 1.0 2014. 11.25. első verzió Seida Zoltán Hozzáadva: Verzió 1.1 2015. 08.17. 7 Éles tesztek fejezetben:
Az ábrán a mechatronikát alkotó tudományos területek egymás közötti viszonya látható. A szenzorok és aktuátorok a mechanika és elektrotechnika szoros
 Aktuátorok Az ábrán a mechatronikát alkotó tudományos területek egymás közötti viszonya látható. A szenzorok és aktuátorok a mechanika és elektrotechnika szoros kapcsolatára utalnak. mért nagyság A fizikai
Aktuátorok Az ábrán a mechatronikát alkotó tudományos területek egymás közötti viszonya látható. A szenzorok és aktuátorok a mechanika és elektrotechnika szoros kapcsolatára utalnak. mért nagyság A fizikai
Egyszabadságfokú mechanikai rendszer irányítása nyílt hurkú vezérlés
 Egyszabadságfokú mechanikai rendszer irányítása nyílt hurkú vezérlés A gyakorlat célja Egyenáramú szervo motorral vezérelt egyszabadságfokú mechanikai rendszer meghajtó áramkörének és a NATIONAL INSTRUMENTS
Egyszabadságfokú mechanikai rendszer irányítása nyílt hurkú vezérlés A gyakorlat célja Egyenáramú szervo motorral vezérelt egyszabadságfokú mechanikai rendszer meghajtó áramkörének és a NATIONAL INSTRUMENTS
Intelligens gépek elemei Bevezetés
 Intelligens gépek elemei Bevezetés A gépészet fejlődése, a mechatronika kialakulása Mi jellemezte az 1900 előtti időket? Tisztán mechanikus rendszerek Gőzgép (1769) Dinamók, egyenáramú motor (1870) Forgó
Intelligens gépek elemei Bevezetés A gépészet fejlődése, a mechatronika kialakulása Mi jellemezte az 1900 előtti időket? Tisztán mechanikus rendszerek Gőzgép (1769) Dinamók, egyenáramú motor (1870) Forgó
Az elektromágneses indukció jelensége
 Az elektromágneses indukció jelensége Korábban láttuk, hogy az elektromos áram hatására mágneses tér keletkezik (Ampère-féle gerjesztési törvény) Kérdés, hogy vajon ez megfordítható-e, és a mágneses tér
Az elektromágneses indukció jelensége Korábban láttuk, hogy az elektromos áram hatására mágneses tér keletkezik (Ampère-féle gerjesztési törvény) Kérdés, hogy vajon ez megfordítható-e, és a mágneses tér
Programozható Vezérlő Rendszerek. Hardver
 Programozható Vezérlő Rendszerek Hardver Hardver-bemeneti kártyák 12-24 Vdc 100-120 Vac 10-60 Vdc 12-24 Vac/dc 5 Vdc (TTL) 200-240 Vac 48 Vdc 24 Vac Belül 5V DC!! 2 Hardver-bemeneti kártyák Potenciál ingadozások
Programozható Vezérlő Rendszerek Hardver Hardver-bemeneti kártyák 12-24 Vdc 100-120 Vac 10-60 Vdc 12-24 Vac/dc 5 Vdc (TTL) 200-240 Vac 48 Vdc 24 Vac Belül 5V DC!! 2 Hardver-bemeneti kártyák Potenciál ingadozások
Érzékelők és beavatkozók
 Érzékelők és beavatkozók AC motorok egyetemi docens - 1 - AC motorok Félrevezető elnevezés, mert: Arra utal, hogy váltakozó árammal működő motorokról van szó, pedig ma vannak egyenfeszültségről táplált
Érzékelők és beavatkozók AC motorok egyetemi docens - 1 - AC motorok Félrevezető elnevezés, mert: Arra utal, hogy váltakozó árammal működő motorokról van szó, pedig ma vannak egyenfeszültségről táplált
Ipari robotok hajtása
 IPARI ROBOTOK Ipari robotok hajtása 4. előad adás Dr. Pintér r JózsefJ A hajtási rendszerek feladata az, hogy a robot TCP pontját az előírt pontossággal - az irányítórendszer utasításainak megfelelően
IPARI ROBOTOK Ipari robotok hajtása 4. előad adás Dr. Pintér r JózsefJ A hajtási rendszerek feladata az, hogy a robot TCP pontját az előírt pontossággal - az irányítórendszer utasításainak megfelelően
MOTOR HAJTÁS Nagyfeszültségű megszakító
 Forradalom a megszakító technológiában MOTOR HAJTÁS Nagyfeszültségű megszakító ABB HV Products - Page 1 Mi az a Motor Hajtás? ABB HV Products - Page 2 Energia Átvitel Energia Kioldás Energia Tárolás Energia
Forradalom a megszakító technológiában MOTOR HAJTÁS Nagyfeszültségű megszakító ABB HV Products - Page 1 Mi az a Motor Hajtás? ABB HV Products - Page 2 Energia Átvitel Energia Kioldás Energia Tárolás Energia
Elektrotechnika. Dr. Hodossy László előadás
 Elektrotechnika 13 előadás Dr Hodossy László 2006 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 Szervo Lineáris Lineáris Lineáris Szervo Vezérlő és szabályozó rendszerekben pozícionálási célra alkalmazzák
Elektrotechnika 13 előadás Dr Hodossy László 2006 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 Szervo Lineáris Lineáris Lineáris Szervo Vezérlő és szabályozó rendszerekben pozícionálási célra alkalmazzák
ÁRAMKÖRÖK SZIMULÁCIÓJA
 ÁRAMKÖRÖK SZIMULÁCIÓJA Az áramkörök szimulációja révén betekintést nyerünk azok működésébe. Meg tudjuk határozni az áramkörök válaszát különböző gerjesztésekre, különböző üzemmódokra. Végezhetők analóg
ÁRAMKÖRÖK SZIMULÁCIÓJA Az áramkörök szimulációja révén betekintést nyerünk azok működésébe. Meg tudjuk határozni az áramkörök válaszát különböző gerjesztésekre, különböző üzemmódokra. Végezhetők analóg
Háromfázisú aszinkron motorok
 Háromfázisú aszinkron motorok 1. példa Egy háromfázisú, 20 kw teljesítményű, 6 pólusú, 400 V/50 Hz hálózatról üzemeltetett aszinkron motor fordulatszáma 950 1/min. Teljesítmény tényezője 0,88, az állórész
Háromfázisú aszinkron motorok 1. példa Egy háromfázisú, 20 kw teljesítményű, 6 pólusú, 400 V/50 Hz hálózatról üzemeltetett aszinkron motor fordulatszáma 950 1/min. Teljesítmény tényezője 0,88, az állórész
Analóg elektronika - laboratóriumi gyakorlatok
 Analóg elektronika - laboratóriumi gyakorlatok. Mûveleti erõsítõk egyenáramú jellemzése és alkalmazásai. Elmélet Az erõsítõ fogalmát valamint az integrált mûveleti erõsítõk szerkezetét és viselkedését
Analóg elektronika - laboratóriumi gyakorlatok. Mûveleti erõsítõk egyenáramú jellemzése és alkalmazásai. Elmélet Az erõsítõ fogalmát valamint az integrált mûveleti erõsítõk szerkezetét és viselkedését
DEBRECENI EGYETEM MŰSZAKI KAR GÉPÉSZMÉRNÖKI TANSZÉK SPM BEARINGCHECKER KÉZI CSAPÁGYMÉRŐ HASZNÁLATA /OKTATÁSI SEGÉDLET DIAGNOSZTIKA TANTÁRGYHOZ/
 DEBRECENI EGYETEM MŰSZAKI KAR GÉPÉSZMÉRNÖKI TANSZÉK SPM BEARINGCHECKER KÉZI CSAPÁGYMÉRŐ HASZNÁLATA /OKTATÁSI SEGÉDLET DIAGNOSZTIKA TANTÁRGYHOZ/ ÖSSZEÁLLÍTOTTA: DEÁK KRISZTIÁN 2013 Az SPM BearingChecker
DEBRECENI EGYETEM MŰSZAKI KAR GÉPÉSZMÉRNÖKI TANSZÉK SPM BEARINGCHECKER KÉZI CSAPÁGYMÉRŐ HASZNÁLATA /OKTATÁSI SEGÉDLET DIAGNOSZTIKA TANTÁRGYHOZ/ ÖSSZEÁLLÍTOTTA: DEÁK KRISZTIÁN 2013 Az SPM BearingChecker
Irányításelmélet és technika I.
 Irányításelmélet és technika I. Elektromechanikai rendszerek dinamikus leírása Magyar Attila Pannon Egyetem Műszaki Informatikai Kar Villamosmérnöki és Információs Rendszerek Tanszék amagyar@almos.vein.hu
Irányításelmélet és technika I. Elektromechanikai rendszerek dinamikus leírása Magyar Attila Pannon Egyetem Műszaki Informatikai Kar Villamosmérnöki és Információs Rendszerek Tanszék amagyar@almos.vein.hu
Mérés és adatgyűjtés
 Mérés és adatgyűjtés 4. óra - levelező Mingesz Róbert Szegedi Tudományegyetem 2011. március 18. MA lev - 4. óra Verzió: 1.3 Utolsó frissítés: 2011. május 15. 1/51 Tartalom I 1 A/D konverterek alkalmazása
Mérés és adatgyűjtés 4. óra - levelező Mingesz Róbert Szegedi Tudományegyetem 2011. március 18. MA lev - 4. óra Verzió: 1.3 Utolsó frissítés: 2011. május 15. 1/51 Tartalom I 1 A/D konverterek alkalmazása
12/2013. (III. 29.) NFM rendelet szakmai és vizsgakövetelménye alapján.
 NFM rendelet szakmai és vizsgakövetelménye alapján.") 12/2013. (III. 29.) NFM rendelet szakmai és vizsgakövetelménye alapján. Szakképesítés, azonosító száma és megnevezése 54 525 01 Autóelektronikai műszerész Tájékoztató A vizsgázó az első lapra írja fel
12/2013. (III. 29.) NFM rendelet szakmai és vizsgakövetelménye alapján. Szakképesítés, azonosító száma és megnevezése 54 525 01 Autóelektronikai műszerész Tájékoztató A vizsgázó az első lapra írja fel
Programozható vezérlő rendszerek. Elektromágneses kompatibilitás II.
 Elektromágneses kompatibilitás II. EMC érintkező védelem - az érintkezők nyitása és zárása során ún. átívelések jönnek létre - ezek csökkentik az érintkezők élettartamát - és nagyfrekvenciás EM sugárzások
Elektromágneses kompatibilitás II. EMC érintkező védelem - az érintkezők nyitása és zárása során ún. átívelések jönnek létre - ezek csökkentik az érintkezők élettartamát - és nagyfrekvenciás EM sugárzások
A 27/2012 (VIII. 27.) NGM rendelet (12/2013 (III.28) NGM rendelet által módosított) szakmai és vizsgakövetelménye alapján.
 NGM rendelet (12/2013 (III.28) NGM rendelet által módosított) szakmai és vizsgakövetelménye alapján.") A 27/2012 (VIII. 27.) NGM rendelet (12/2013 (III.28) NGM rendelet által módosított) szakmai és vizsgakövetelménye alapján. Szakképesítés, azonosító száma és megnevezése 32 521 01 Felvonószerelő Tájékoztató
A 27/2012 (VIII. 27.) NGM rendelet (12/2013 (III.28) NGM rendelet által módosított) szakmai és vizsgakövetelménye alapján. Szakképesítés, azonosító száma és megnevezése 32 521 01 Felvonószerelő Tájékoztató
1. ábra. Forrás: AUTODATA
 8.7. Elektronikusan irányított dízelbefecskendező rendszerek (Hetedik rész Közös nyomásterű (common rail) dízelbefecskendező rendszer III.) Előző két írásunkban blokkvázlata felhasználásával bemutattuk
8.7. Elektronikusan irányított dízelbefecskendező rendszerek (Hetedik rész Közös nyomásterű (common rail) dízelbefecskendező rendszer III.) Előző két írásunkban blokkvázlata felhasználásával bemutattuk
EGYENÁRAMÚ GÉP VIZSGÁLATA Laboratóriumi mérési útmutató
 BUDAPESTI MÛSZAKI ÉS GAZDASÁGTUDOMÁNYI EGYETEM VILLAMOSMÉRNÖKI ÉS INFORMATIKAI KAR VILLAMOS ENERGETIKA TANSZÉK Villamos gépek és hajtások csoport EGYENÁRAMÚ GÉP VIZSGÁLATA Laboratóriumi mérési útmutató
BUDAPESTI MÛSZAKI ÉS GAZDASÁGTUDOMÁNYI EGYETEM VILLAMOSMÉRNÖKI ÉS INFORMATIKAI KAR VILLAMOS ENERGETIKA TANSZÉK Villamos gépek és hajtások csoport EGYENÁRAMÚ GÉP VIZSGÁLATA Laboratóriumi mérési útmutató
2. Elméleti összefoglaló
 2. Elméleti összefoglaló 2.1 A D/A konverterek [1] A D/A konverter feladata, hogy a bemenetére érkező egész számmal arányos analóg feszültséget vagy áramot állítson elő a kimenetén. A működéséhez szükséges
2. Elméleti összefoglaló 2.1 A D/A konverterek [1] A D/A konverter feladata, hogy a bemenetére érkező egész számmal arányos analóg feszültséget vagy áramot állítson elő a kimenetén. A működéséhez szükséges
X. ANALÓG JELEK ILLESZTÉSE DIGITÁLIS ESZKÖZÖKHÖZ
 X. ANALÓG JELEK ILLESZTÉSE DIGITÁLIS ESZKÖZÖKHÖZ Ma az analóg jelek feldolgozása (is) mindinkább digitális eszközökkel és módszerekkel történik. A feldolgozás előtt az analóg jeleket digitalizálni kell.
X. ANALÓG JELEK ILLESZTÉSE DIGITÁLIS ESZKÖZÖKHÖZ Ma az analóg jelek feldolgozása (is) mindinkább digitális eszközökkel és módszerekkel történik. A feldolgozás előtt az analóg jeleket digitalizálni kell.
VILLAMOS FORGÓGÉPEK. Forgó mozgás létesítése
 SZÉCHENYI ISTVÁN EGYETEM HTTP://UNI.SZE.HU VILLAMOS FORGÓGÉPEK Forgó mozgás létesítése Marcsa Dániel Villamos gépek és energetika 203/204 - őszi szemeszter Elektromechanikai átalakítás Villamos rendszer
SZÉCHENYI ISTVÁN EGYETEM HTTP://UNI.SZE.HU VILLAMOS FORGÓGÉPEK Forgó mozgás létesítése Marcsa Dániel Villamos gépek és energetika 203/204 - őszi szemeszter Elektromechanikai átalakítás Villamos rendszer
1 kérdés. Személyes kezdőlap Villamos Gelencsér Géza Simonyi teszt május 13. szombat Teszt feladatok 2017 Előzetes megtekintés
 Személyes kezdőlap Villamos Gelencsér Géza Simonyi teszt 2017. május 13. szombat Teszt feladatok 2017 Előzetes megtekintés Kezdés ideje 2017. május 9., kedd, 16:54 Állapot Befejezte Befejezés dátuma 2017.
Személyes kezdőlap Villamos Gelencsér Géza Simonyi teszt 2017. május 13. szombat Teszt feladatok 2017 Előzetes megtekintés Kezdés ideje 2017. május 9., kedd, 16:54 Állapot Befejezte Befejezés dátuma 2017.
9. Laboratóriumi gyakorlat NYOMÁSÉRZÉKELŐK
 9. Laboratóriumi gyakorlat NYOMÁSÉRZÉKELŐK 1.A gyakorlat célja Az MPX12DP piezorezisztiv differenciális nyomásérzékelő tanulmányozása. A nyomás feszültség p=f(u) karakterisztika megrajzolása. 2. Elméleti
9. Laboratóriumi gyakorlat NYOMÁSÉRZÉKELŐK 1.A gyakorlat célja Az MPX12DP piezorezisztiv differenciális nyomásérzékelő tanulmányozása. A nyomás feszültség p=f(u) karakterisztika megrajzolása. 2. Elméleti
= Φ B(t = t) Φ B (t = 0) t
 Φ B (t = 0) t") 4. Gyakorlat 32B-3 Egy ellenállású, r sugarú köralakú huzalhurok a B homogén mágneses erőtér irányára merőleges felületen fekszik. A hurkot gyorsan, t idő alatt 180 o -kal átforditjuk. Számitsuk ki, hogy
4. Gyakorlat 32B-3 Egy ellenállású, r sugarú köralakú huzalhurok a B homogén mágneses erőtér irányára merőleges felületen fekszik. A hurkot gyorsan, t idő alatt 180 o -kal átforditjuk. Számitsuk ki, hogy
SYS700-A Digitális szabályozó és vezérlõ modul DDC rendszerelemek, DIALOG-III család. Terméktámogatás:
 DDC rendszerelemek, DIALOG-III család KIVITEL ALKALMAZÁS A SYS00-A a Dialog-III készülékcsalád analóg jelek kezelésére alkalmas tagja, amely kifejezetten épületgépészeti szabályozási és vezérlési feladatok
DDC rendszerelemek, DIALOG-III család KIVITEL ALKALMAZÁS A SYS00-A a Dialog-III készülékcsalád analóg jelek kezelésére alkalmas tagja, amely kifejezetten épületgépészeti szabályozási és vezérlési feladatok
Mérés és adatgyűjtés
 Mérés és adatgyűjtés 7. óra Mingesz Róbert Szegedi Tudományegyetem 2013. április 11. MA - 7. óra Verzió: 2.2 Utolsó frissítés: 2013. április 10. 1/37 Tartalom I 1 Szenzorok 2 Hőmérséklet mérése 3 Fény
Mérés és adatgyűjtés 7. óra Mingesz Róbert Szegedi Tudományegyetem 2013. április 11. MA - 7. óra Verzió: 2.2 Utolsó frissítés: 2013. április 10. 1/37 Tartalom I 1 Szenzorok 2 Hőmérséklet mérése 3 Fény
KÉRDÉSEK PROGRAMOZÁSBÓL_TKU (ESZTERGÁLÁS) 1. Írd le а CNC megmunkáló rendszerek jellemző pontjainak neveit: a) М 0,5 b) А 0,5 c) W 0,5 d) R 0,5
 1. Írd le а CNC megmunkáló rendszerek jellemző pontjainak neveit: a) М 0,5 b) А 0,5 c) W 0,5 d) R 0,5") KÉRDÉSEK PROGRAMOZÁSBÓL_TKU (ESZTERGÁLÁS) 1. Írd le а CNC megmunkáló rendszerek jellemző pontjainak neveit: a) М 0,5 b) А 0,5 c) W 0,5 d) R 0,5 2. Rajzold le a CNC megmunkáló rendszerek jellemző pontjait:
KÉRDÉSEK PROGRAMOZÁSBÓL_TKU (ESZTERGÁLÁS) 1. Írd le а CNC megmunkáló rendszerek jellemző pontjainak neveit: a) М 0,5 b) А 0,5 c) W 0,5 d) R 0,5 2. Rajzold le a CNC megmunkáló rendszerek jellemző pontjait:
1. Irányítástechnika. Készítette: Fecser Nikolett. 2. Ipari elektronika. Készítette: Horváth Lászó
 A mechatronikai technikus képzés átvilágítására és fejlesztésére irányuló projekt eredményeképp az egyes tantárgyakhoz új, disszeminációra alakalmas tanmeneteket dolgoztunk ki. 1. Irányítástechnika. Készítette:
A mechatronikai technikus képzés átvilágítására és fejlesztésére irányuló projekt eredményeképp az egyes tantárgyakhoz új, disszeminációra alakalmas tanmeneteket dolgoztunk ki. 1. Irányítástechnika. Készítette:
Mágneses mező tesztek. d) Egy mágnesrúd északi pólusához egy másik mágnesrúd déli pólusát közelítjük.
 Egy mágnesrúd északi pólusához egy másik mágnesrúd déli pólusát közelítjük.") Mágneses mező tesztek 1. Melyik esetben nem tapasztalunk vonzóerőt? a) A mágnesrúd északi pólusához vasdarabot közelítünk. b) A mágnesrúd közepéhez vasdarabot közelítünk. c) A mágnesrúd déli pólusához
Mágneses mező tesztek 1. Melyik esetben nem tapasztalunk vonzóerőt? a) A mágnesrúd északi pólusához vasdarabot közelítünk. b) A mágnesrúd közepéhez vasdarabot közelítünk. c) A mágnesrúd déli pólusához
(Az 1. példa adatai Uray-Szabó: Elektrotechnika c. (Nemzeti Tankönyvkiadó) könyvéből vannak.)
 könyvéből vannak.)") Egyenáramú gépek (Az 1. példa adatai Uray-Szabó: Elektrotechnika c. (Nemzeti Tankönyvkiadó) könyvéből vannak.) 1. Párhuzamos gerjesztésű egyenáramú motor 500 V kapocsfeszültségű, párhuzamos gerjesztésű
Egyenáramú gépek (Az 1. példa adatai Uray-Szabó: Elektrotechnika c. (Nemzeti Tankönyvkiadó) könyvéből vannak.) 1. Párhuzamos gerjesztésű egyenáramú motor 500 V kapocsfeszültségű, párhuzamos gerjesztésű
KÉRDÉSEK PROGRAMOZÁSBÓL_TKU (MARÁS) 1. Írd le а CNC megmunkáló rendszerek jellemző pontjainak neveit: a) М 0,5 b) А 0,5 c) W 0,5 d) R 0,5
 1. Írd le а CNC megmunkáló rendszerek jellemző pontjainak neveit: a) М 0,5 b) А 0,5 c) W 0,5 d) R 0,5") KÉRDÉSEK PROGRAMOZÁSBÓL_TKU (MARÁS) 1. Írd le а CNC megmunkáló rendszerek jellemző pontjainak neveit: a) М 0,5 b) А 0,5 c) W 0,5 d) R 0,5 2. Rajzold le a CNC megmunkáló rendszerek jellemző pontjait: a)
KÉRDÉSEK PROGRAMOZÁSBÓL_TKU (MARÁS) 1. Írd le а CNC megmunkáló rendszerek jellemző pontjainak neveit: a) М 0,5 b) А 0,5 c) W 0,5 d) R 0,5 2. Rajzold le a CNC megmunkáló rendszerek jellemző pontjait: a)
Mágnesesség, elektromágnes, indukció Tudománytörténeti háttér Már i. e. 600 körül Thalész felfedezte, hogy Magnesia város mellett vannak olyan talált
 Mágnesesség, elektromágnes, indukció Tudománytörténeti háttér Már i. e. 600 körül Thalész felfedezte, hogy Magnesia város mellett vannak olyan talált ércek, amelyek vonzzák a vasat. Ezeket mágnesnek nevezték
Mágnesesség, elektromágnes, indukció Tudománytörténeti háttér Már i. e. 600 körül Thalész felfedezte, hogy Magnesia város mellett vannak olyan talált ércek, amelyek vonzzák a vasat. Ezeket mágnesnek nevezték
Analóg elektronika - laboratóriumi gyakorlatok
 Analóg elektronika - laboratóriumi gyakorlatok. Mûveleti erõsítõk váltakozó-áramú alkalmazásai. Elmélet Az integrált mûveleti erõsítõk váltakozó áramú viselkedését a. fejezetben (jegyzet és prezentáció)
Analóg elektronika - laboratóriumi gyakorlatok. Mûveleti erõsítõk váltakozó-áramú alkalmazásai. Elmélet Az integrált mûveleti erõsítõk váltakozó áramú viselkedését a. fejezetben (jegyzet és prezentáció)
Elektrotechnika. 11. előadás. Összeállította: Dr. Hodossy László
 11. előadás Összeállította: Dr. Hodossy László 1. Szerkezeti felépítés 2. Működés 3. Működés 4. Armatúra reakció 5. Armatúra reakció 6. Egyenáramú gépek osztályozása 7. Külső 8. Külső. 9. Soros. 10. Soros
11. előadás Összeállította: Dr. Hodossy László 1. Szerkezeti felépítés 2. Működés 3. Működés 4. Armatúra reakció 5. Armatúra reakció 6. Egyenáramú gépek osztályozása 7. Külső 8. Külső. 9. Soros. 10. Soros
Mit nevezünk nehézségi erőnek?
 Mit nevezünk nehézségi erőnek? Azt az erőt, amelynek hatására a szabadon eső testek g (gravitációs) gyorsulással esnek a vonzó test centruma felé, nevezzük nehézségi erőnek. F neh = m g Mi a súly? Azt
Mit nevezünk nehézségi erőnek? Azt az erőt, amelynek hatására a szabadon eső testek g (gravitációs) gyorsulással esnek a vonzó test centruma felé, nevezzük nehézségi erőnek. F neh = m g Mi a súly? Azt
EGYENÁRAMÚ TÁPEGYSÉGEK
 dátum:... a mérést végezte:... EGYENÁRAMÚ TÁPEGYSÉGEK m é r é s i j e g y z k ö n y v 1/A. Mérje meg az adott hálózati szabályozható (toroid) transzformátor szekunder tekercsének minimálisan és maximálisan
dátum:... a mérést végezte:... EGYENÁRAMÚ TÁPEGYSÉGEK m é r é s i j e g y z k ö n y v 1/A. Mérje meg az adott hálózati szabályozható (toroid) transzformátor szekunder tekercsének minimálisan és maximálisan
4. /ÁK Adja meg a villamos áramkör passzív építő elemeit!
 Áramkörök 1. /ÁK Adja meg a mértékegységek lehetséges prefixumait (20db)! 2. /ÁK Értelmezze az ideális feszültség generátor fogalmát! 3. /ÁK Mit ért valóságos feszültség generátor alatt? 4. /ÁK Adja meg
Áramkörök 1. /ÁK Adja meg a mértékegységek lehetséges prefixumait (20db)! 2. /ÁK Értelmezze az ideális feszültség generátor fogalmát! 3. /ÁK Mit ért valóságos feszültség generátor alatt? 4. /ÁK Adja meg
BEMUTATÓ FELADATOK (2) ÁLTALÁNOS GÉPTAN tárgyból
 ÁLTALÁNOS GÉPTAN tárgyból") BEMUTATÓ FELADATOK () 1/() Egy mozdony vízszintes 600 m-es pályaszakaszon 150 kn állandó húzóer t fejt ki. A vonat sebessége 36 km/h-ról 54 km/h-ra növekszik. A vonat tömege 1000 Mg. a.) Mekkora a mozgási
BEMUTATÓ FELADATOK () 1/() Egy mozdony vízszintes 600 m-es pályaszakaszon 150 kn állandó húzóer t fejt ki. A vonat sebessége 36 km/h-ról 54 km/h-ra növekszik. A vonat tömege 1000 Mg. a.) Mekkora a mozgási
Transzformátor rezgés mérés. A BME Villamos Energetika Tanszéken
 Transzformátor rezgés mérés A BME Villamos Energetika Tanszéken A valóság egyszerűsítése, modellezés. A mérés tervszerűen végrehajtott tevékenység, ezért a bonyolult valóságos rendszert először egyszerűsítik.
Transzformátor rezgés mérés A BME Villamos Energetika Tanszéken A valóság egyszerűsítése, modellezés. A mérés tervszerűen végrehajtott tevékenység, ezért a bonyolult valóságos rendszert először egyszerűsítik.
Hajtástechnika. Villanymotorok. Egyenáramú motorok. Váltóáramú motorok
 Hajtástechnika Villanymotorok Egyenáramú motorok Váltóáramú motorok Soros gerjesztésű Párhuzamos gerjesztésű Külső gerjesztésű Vegyes gerjesztésű Állandó mágneses gerjesztésű Aszinkron motorok Szinkron
Hajtástechnika Villanymotorok Egyenáramú motorok Váltóáramú motorok Soros gerjesztésű Párhuzamos gerjesztésű Külső gerjesztésű Vegyes gerjesztésű Állandó mágneses gerjesztésű Aszinkron motorok Szinkron
Elektronika 2. TFBE5302
 Elektronika 2. TFBE5302 Mérőműszerek Analóg elektronika Feszültség és áram mérése Feszültségmérő: V U R 1 I 1 igen nagy belső ellenállású mérőműszer párhuzamosan kapcsolandó a mérendő alkatrésszel R 3
Elektronika 2. TFBE5302 Mérőműszerek Analóg elektronika Feszültség és áram mérése Feszültségmérő: V U R 1 I 1 igen nagy belső ellenállású mérőműszer párhuzamosan kapcsolandó a mérendő alkatrésszel R 3
Használható segédeszköz: szabványok, táblázatok, gépkönyvek, számológép
 A 27/2012 (VIII. 27.) NGM rendelet (12/2013 (III.28) NGM rendelet által módosított) szakmai és vizsgakövetelménye alapján. Szakképesítés, azonosító száma és megnevezése 34 522 02 Elektromos gép- és készülékszerelő
A 27/2012 (VIII. 27.) NGM rendelet (12/2013 (III.28) NGM rendelet által módosított) szakmai és vizsgakövetelménye alapján. Szakképesítés, azonosító száma és megnevezése 34 522 02 Elektromos gép- és készülékszerelő
Elektromágnesség tesztek
 Elektromágnesség tesztek 1. Melyik esetben nem tapasztalunk vonzóerőt? a) A mágnesrúd északi pólusához vasdarabot közelítünk. b) A mágnesrúd közepéhez vasdarabot közelítünk. c) A mágnesrúd déli pólusához
Elektromágnesség tesztek 1. Melyik esetben nem tapasztalunk vonzóerőt? a) A mágnesrúd északi pólusához vasdarabot közelítünk. b) A mágnesrúd közepéhez vasdarabot közelítünk. c) A mágnesrúd déli pólusához
Felhasználói kézikönyv. Zárt hurkú, léptetőmotoros rendszer, HSS60 típusú meghajtó és 60HSE3N-D25 motorral.
 Felhasználói kézikönyv Zárt hurkú, léptetőmotoros rendszer, HSS60 típusú meghajtó és 60HSE3N-D25 motorral. Bevezetés A HSS60 egy új típusú léptetőmotor meghajtó, mely enkóderrel visszacsatolt, áramvektoros
Felhasználói kézikönyv Zárt hurkú, léptetőmotoros rendszer, HSS60 típusú meghajtó és 60HSE3N-D25 motorral. Bevezetés A HSS60 egy új típusú léptetőmotor meghajtó, mely enkóderrel visszacsatolt, áramvektoros
2.) Fajlagos ellenállásuk nagysága alapján állítsd sorrendbe a következő fémeket! Kezd a legjobban vezető fémmel!
 Fajlagos ellenállásuk nagysága alapján állítsd sorrendbe a következő fémeket! Kezd a legjobban vezető fémmel!") 1.) Hány Coulomb töltést tartalmaz a 72 Ah ás akkumulátor? 2.) Fajlagos ellenállásuk nagysága alapján állítsd sorrendbe a következő fémeket! Kezd a legjobban vezető fémmel! a.) alumínium b.) ezüst c.)
1.) Hány Coulomb töltést tartalmaz a 72 Ah ás akkumulátor? 2.) Fajlagos ellenállásuk nagysága alapján állítsd sorrendbe a következő fémeket! Kezd a legjobban vezető fémmel! a.) alumínium b.) ezüst c.)
72-74. Képernyő. monitor
 72-74 Képernyő monitor Monitorok. A monitorok szöveg és grafika megjelenítésére alkalmas kimeneti (output) eszközök. A képet képpontok (pixel) alkotják. Általános jellemzők (LCD) Képátló Képarány Felbontás
72-74 Képernyő monitor Monitorok. A monitorok szöveg és grafika megjelenítésére alkalmas kimeneti (output) eszközök. A képet képpontok (pixel) alkotják. Általános jellemzők (LCD) Képátló Képarány Felbontás
AIRPOL PRM frekvenciaváltós csavarkompresszorok. Airpol PRM frekvenciaváltós csavarkompresszorok
 Airpol PRM frekvenciaváltós csavarkompresszorok Az Airpol PRM frekvenciaváltós csavarkompresszorok változtatható sebességű meghajtással rendelkeznek 50-100%-ig. Ha a sűrített levegő fogyasztás kevesebb,
Airpol PRM frekvenciaváltós csavarkompresszorok Az Airpol PRM frekvenciaváltós csavarkompresszorok változtatható sebességű meghajtással rendelkeznek 50-100%-ig. Ha a sűrített levegő fogyasztás kevesebb,
ACS-1000 Ipari analóg szabályozó rendszer
 ACS is an acronym for Analog Control System ; a laboratory teaching system with analog control courses Az 17 különböző dugaszolható modulból és az ACS-18001 DC szervó motor & szabályozó egységből áll.
ACS is an acronym for Analog Control System ; a laboratory teaching system with analog control courses Az 17 különböző dugaszolható modulból és az ACS-18001 DC szervó motor & szabályozó egységből áll.
T2-CNCUSB vezérlő család hardver segédlet
 T2-CNCUSB vezérlő család hardver segédlet CPU5A Kártyaméret: 100x100mm 3 vagy 4 tengelyes interpoláció, max.125 KHz léptetési frekvencia. Szabványos kimenetek (Főorsó BE/KI, Fordulatszáám: PWM / 0-10V,
T2-CNCUSB vezérlő család hardver segédlet CPU5A Kártyaméret: 100x100mm 3 vagy 4 tengelyes interpoláció, max.125 KHz léptetési frekvencia. Szabványos kimenetek (Főorsó BE/KI, Fordulatszáám: PWM / 0-10V,
Útváltók. Fenyvesi D. Dr. Harkay G. OE-BGK
 Útváltók Fenyvesi D. Dr. Harkay G. OE-BGK Irányítóelemek Irányítóelemek A hidraulikus rendszer alapvető irányítási feladatait, a működtetett rendszer igényei határozzák meg, mint pl. Mozgásirány: útváltók.
Útváltók Fenyvesi D. Dr. Harkay G. OE-BGK Irányítóelemek Irányítóelemek A hidraulikus rendszer alapvető irányítási feladatait, a működtetett rendszer igényei határozzák meg, mint pl. Mozgásirány: útváltók.
Fordulatszám szabályozott egyenáramú szervohajtás vizsgálata
 2011.03.24. Fordulatszám szabályozott egyenáramú szervohajtás vizsgálata BMEVIVEM264 Dr. Számel László Budapesti Műszaki és Gazdaságtudományi Egyetem Villamos Energetika Tanszék Készült a Társadalmi Megújulás
2011.03.24. Fordulatszám szabályozott egyenáramú szervohajtás vizsgálata BMEVIVEM264 Dr. Számel László Budapesti Műszaki és Gazdaságtudományi Egyetem Villamos Energetika Tanszék Készült a Társadalmi Megújulás
International GTE Conference MANUFACTURING 2012. 14-16 November, 2012 Budapest, Hungary. Ákos György*, Bogár István**, Bánki Zsolt*, Báthor Miklós*,
 International GTE Conference MANUFACTURING 2012 14-16 November, 2012 Budapest, Hungary MÉRŐGÉP FEJLESZTÉSE HENGERES MUNKADARABOK MÉRETELLENŐRZÉSÉRE Ákos György*, Bogár István**, Bánki Zsolt*, Báthor Miklós*,
International GTE Conference MANUFACTURING 2012 14-16 November, 2012 Budapest, Hungary MÉRŐGÉP FEJLESZTÉSE HENGERES MUNKADARABOK MÉRETELLENŐRZÉSÉRE Ákos György*, Bogár István**, Bánki Zsolt*, Báthor Miklós*,
CÉLKOORDINÁTOROK alkalmazástechnikája CÉLKOORDINÁTOROK FELÉPÍTÉSI ELVE
 Géczi József Dr. Szabó László CÉLKOORDINÁTOROK alkalmazástechnikája A rádiótechnikai célkoordinátorok (RCK) feladata azon szögkoordináták mérése, amelyek a távolságvektor koordinátor hossztengelyéhez viszonyított
Géczi József Dr. Szabó László CÉLKOORDINÁTOROK alkalmazástechnikája A rádiótechnikai célkoordinátorok (RCK) feladata azon szögkoordináták mérése, amelyek a távolságvektor koordinátor hossztengelyéhez viszonyított
Feszültségérzékelők a méréstechnikában
 5. Laboratóriumi gyakorlat Feszültségérzékelők a méréstechnikában 1. A gyakorlat célja Az elektronikus mérőműszerekben használatos különböző feszültségdetektoroknak tanulmányozása, átviteli karakterisztika
5. Laboratóriumi gyakorlat Feszültségérzékelők a méréstechnikában 1. A gyakorlat célja Az elektronikus mérőműszerekben használatos különböző feszültségdetektoroknak tanulmányozása, átviteli karakterisztika
TTLAC/1 TTLACT/1 TTLAC/2 TTLACT/2
 TTLAC/1 TTLACT/1 TTLAC/2 TTLACT/2 NCT Ipari Elektronikai Kft. 1/14 Dátum: 2016.12.16. TARTALOMJEGYZÉK BEVEZETÉS... 3 AZONOSÍTÁS... 3 1 CSATLAKOZÓ KIOSZTÁSOK... 5 2 JELADÓ BEMENET... 6 3 ANALÓG KIMENET...
TTLAC/1 TTLACT/1 TTLAC/2 TTLACT/2 NCT Ipari Elektronikai Kft. 1/14 Dátum: 2016.12.16. TARTALOMJEGYZÉK BEVEZETÉS... 3 AZONOSÍTÁS... 3 1 CSATLAKOZÓ KIOSZTÁSOK... 5 2 JELADÓ BEMENET... 6 3 ANALÓG KIMENET...
M ű veleti erő sítő k I.
 dátum:... a mérést végezte:... M ű veleti erő sítő k I. mérési jegyző könyv 1. Visszacsatolás nélküli kapcsolások 1.1. Kösse az erősítő invertáló bemenetét a tápfeszültség 0 potenciálú kimenetére! Ezt
dátum:... a mérést végezte:... M ű veleti erő sítő k I. mérési jegyző könyv 1. Visszacsatolás nélküli kapcsolások 1.1. Kösse az erősítő invertáló bemenetét a tápfeszültség 0 potenciálú kimenetére! Ezt
A forgójeladók mechanikai kialakítása
 A forgójeladók mechanikai kialakítása A különböző gyártók néhány szabványos kiviteltől eltekintve nagy forma- és méretválasztékban kínálják termékeiket. Az elektromos illesztéshez hasonlóan a mechanikai
A forgójeladók mechanikai kialakítása A különböző gyártók néhány szabványos kiviteltől eltekintve nagy forma- és méretválasztékban kínálják termékeiket. Az elektromos illesztéshez hasonlóan a mechanikai
MÁGNESES TÉR, INDUKCIÓ
 Egy vezetéket 2 cm átmérőjű szigetelő testre 500 menettel tekercselünk fel, 25 cm hosszúságban. Mekkora térerősség lép fel a tekercs belsejében, ha a vezetékben 5 amperes áram folyik? Mekkora a mágneses
Egy vezetéket 2 cm átmérőjű szigetelő testre 500 menettel tekercselünk fel, 25 cm hosszúságban. Mekkora térerősség lép fel a tekercs belsejében, ha a vezetékben 5 amperes áram folyik? Mekkora a mágneses
BSD2010 BSD4010. Bipoláris léptetőmotor meghajtó modulok felhasználói kézikönyve
 BSD2010 BSD4010 Bipoláris léptetőmotor meghajtó modulok felhasználói kézikönyve Q-Tech Mérnöki Szolgáltató Kft. 2003 -2- Tartalomjegyzék Felhasználói kézikönyv 1 Bevezetés... 4 Jellemzők... 4 A meghajtó
BSD2010 BSD4010 Bipoláris léptetőmotor meghajtó modulok felhasználói kézikönyve Q-Tech Mérnöki Szolgáltató Kft. 2003 -2- Tartalomjegyzék Felhasználói kézikönyv 1 Bevezetés... 4 Jellemzők... 4 A meghajtó
Az önindukciós és kölcsönös indukciós tényező meghatározása Az Elektrotechnika tárgy 7. sz. laboratóriumi gyakorlatához Mérésvezetői segédlet
 Az önindukciós és kölcsönös indukciós tényező meghatározása Az Elektrotechnika tárgy 7. sz. laboratóriumi gyakorlatához Mérésvezetői segédlet A hallgatói útmutatóban vázolt program a csoport felkészültsége
Az önindukciós és kölcsönös indukciós tényező meghatározása Az Elektrotechnika tárgy 7. sz. laboratóriumi gyakorlatához Mérésvezetői segédlet A hallgatói útmutatóban vázolt program a csoport felkészültsége
Aszinkron motoros hajtás Matlab szimulációja
 Aszinkron motoros hajtás Matlab szimulációja Az alábbiakban bemutatjuk egy MATLAB programban modellezett 147,06 kw teljesítményű aszinkron motoros hajtás modelljének felépítését, rendszertechnikáját és
Aszinkron motoros hajtás Matlab szimulációja Az alábbiakban bemutatjuk egy MATLAB programban modellezett 147,06 kw teljesítményű aszinkron motoros hajtás modelljének felépítését, rendszertechnikáját és
Szervo alapok gyakorló Analóg és digitális szervó alapok gyakorló
 Szervo alapok gyakorló Analóg és digitális szervó alapok gyakorló 33 sorozat Jellemzõk Nyílt és zárthurkú fordulatszám és helyzet szabályozás Analóg és digitális szabályozás Discovery Software számítógépes
Szervo alapok gyakorló Analóg és digitális szervó alapok gyakorló 33 sorozat Jellemzõk Nyílt és zárthurkú fordulatszám és helyzet szabályozás Analóg és digitális szabályozás Discovery Software számítógépes
AZ ÚJ, JAVÍTOTT HATÁSFOKÚ POLARITÁSVÁLTÓVAL MEGÉPÍTETT MPPT ÁRAMKÖR
 AZ ÚJ, JAVÍTOTT HATÁSFOKÚ POLARITÁSVÁLTÓVAL MEGÉPÍTETT MPPT ÁRAMKÖR Szegedi Péter mérnök százados egyetemi tanársegéd Zrínyi Miklós Nemzetvédelmi Egyetem Vezetés- és Szervezéstudományi Kar Fedélzeti Rendszerek
AZ ÚJ, JAVÍTOTT HATÁSFOKÚ POLARITÁSVÁLTÓVAL MEGÉPÍTETT MPPT ÁRAMKÖR Szegedi Péter mérnök százados egyetemi tanársegéd Zrínyi Miklós Nemzetvédelmi Egyetem Vezetés- és Szervezéstudományi Kar Fedélzeti Rendszerek
Felhasználói kézikönyv MC442H típusú léptetőmotor meghajtóhoz
 Felhasználói kézikönyv MC442H típusú léptetőmotor meghajtóhoz Műszaki adatok: Kimeneti áram: 1,0 4,2 A 15 beállítható mikró lépés felbontás (400-25 600 lépcső / fordulat) Rms érték: 3,0 A Tápfeszültség:
Felhasználói kézikönyv MC442H típusú léptetőmotor meghajtóhoz Műszaki adatok: Kimeneti áram: 1,0 4,2 A 15 beállítható mikró lépés felbontás (400-25 600 lépcső / fordulat) Rms érték: 3,0 A Tápfeszültség:
Logaritmikus erősítő tanulmányozása
 13. fejezet A műveleti erősítők Logaritmikus erősítő tanulmányozása A műveleti erősítő olyan elektronikus áramkör, amely a két bemenete közötti potenciálkülönbséget igen nagy mértékben fölerősíti. A műveleti
13. fejezet A műveleti erősítők Logaritmikus erősítő tanulmányozása A műveleti erősítő olyan elektronikus áramkör, amely a két bemenete közötti potenciálkülönbséget igen nagy mértékben fölerősíti. A műveleti
Használható segédeszköz: szabványok, táblázatok, gépkönyvek, számológép
 A 27/2012 (VIII. 27.) NGM rendelet (12/2013 (III.28) NGM rendelet által módosított) szakmai és vizsgakövetelménye alapján. Szakképesítés, azonosító száma és megnevezése 34 522 02 Elektromos gép- és készülékszerelő
A 27/2012 (VIII. 27.) NGM rendelet (12/2013 (III.28) NGM rendelet által módosított) szakmai és vizsgakövetelménye alapján. Szakképesítés, azonosító száma és megnevezése 34 522 02 Elektromos gép- és készülékszerelő
Fizika II. tantárgy 4. előadásának vázlata MÁGNESES INDUKCIÓ, VÁLTÓÁRAM, VÁLTÓÁRAMÚ HÁLÓZATOK 1. Mágneses indukció: Mozgási indukció
 Fizika. tatárgy 4. előadásáak vázlata MÁGNESES NDKÓ, VÁLÓÁAM, VÁLÓÁAMÚ HÁLÓAOK. Mágeses idukció: Mozgási idukció B v - Vezetőt elmozdítuk mágeses térbe B-re merőlegese, akkor a vezetőbe áram keletkezik,
Fizika. tatárgy 4. előadásáak vázlata MÁGNESES NDKÓ, VÁLÓÁAM, VÁLÓÁAMÚ HÁLÓAOK. Mágeses idukció: Mozgási idukció B v - Vezetőt elmozdítuk mágeses térbe B-re merőlegese, akkor a vezetőbe áram keletkezik,