UAV FEJLESZTÉSEK ÉS KUTATÁS AZ MTA SZTAKI-BAN
|
|
|
- Lilla Orsósné
- 6 évvel ezelőtt
- Látták:
Átírás
, Vanek Bálint, Bauer Péter (bauer.peter@sztaki.")

1 UAV FEJLESZTÉSEK ÉS KUTATÁS AZ MTA SZTAKI-BAN Bokor József Vanek Bálint, Bauer Péter ) MTA-SZTAKI, Rendszer- és Irányításelméleti Kutatólaboratórium Automatikus fedélzeti irányítórendszerek a légiközlekedésben Február 4. BME Közlekedés- és Járműirányítási Tanszék
 o Innováció által vezérelt o Új kutatási eredmények gyors megjelenése Nincsenek kiforrott megoldások o Hatósági")
2 Pilóta nélküli repülőgép rendszerek piaci perspektívái A japán rizsföldek 90%-át UAV-k permetezik Rendkívül dinamikusan fejlődő terület o Komoly piaci potenciál (széles alkalmazási terület) o Innováció által vezérelt o Új kutatási eredmények gyors megjelenése Nincsenek kiforrott megoldások o Hatósági szabályozás hiánya
3 Mire kellenek a UAV-k? Polgári felhasználás: Katasztrófavédelem (árvíz, erdőtűz, légszennyezés stb. figyelése, mérése) Tudományos kutatás (meteorológia stb.) Rendészeti feladatok (zavargások, határvédelem) Katonai felhasználás: Felderítés, információ szerzés Harci alkalmazások

4 Erdőtűz figyelése Marvin helicopter Tömeg: 11 kg Hasznos terhelés: 5-7 kg Rotor átmérő: 1,8 m Hossz: 1,65 m
5 Meteorológiai kutatás, felderítés Global Hawk Tömeg: kg Hatótávolság: km Hasznos terhelés: 1360 kg Fesztávolság: 40 m Maximális rep. magasság: m
6 Harci alkalmazás MQ-9 Reaper (Predator) Tömeg: 4540 kg Hasznos terhelés: 200 kg + fegyverek Fesztávolság: 20 m Maximális rep. magasság: m


7 Robotrepülőgép rendszer fő komponensei Földi állomás A tudomány részéről főleg új algoritmusok fejlesztése, tesztelése, új koncepciók bizonyítása a feladat és a cél, nem a piacképes repülőgép rendszer
8 Robotrepülőgép rendszer fejlesztés fő lépései 1. A repülőgép kiválasztása (felépítés, teherbírás) 2. A rendszer kalibrálása 3. Modellalkotás (számítások, szélcsatorna és egyéb mérések, repülés közbeni mérések) 4. A szabályozási algoritmus (gyakorlatilag programkód) megtervezése és fedélzeti számítógépre vitele 5. Földi tesztelés: 1. HIL (hardware in the loop) tesztek 2. Fedélzeti tesztek 6. Légi tesztelés


9 Repülőgépek E-flite Ultrastick 25e 1.25m 2kg Orca 3m 10kg




10 Navigációs szenzorok Kész termék megvétele (használata könnyű, gyors, de részletes működése ismeretlen) Saját fejlesztés (hosszabb, lassabb, de működése minden részletében ismert) SZTAKI_1 mnav SZTAKI_2
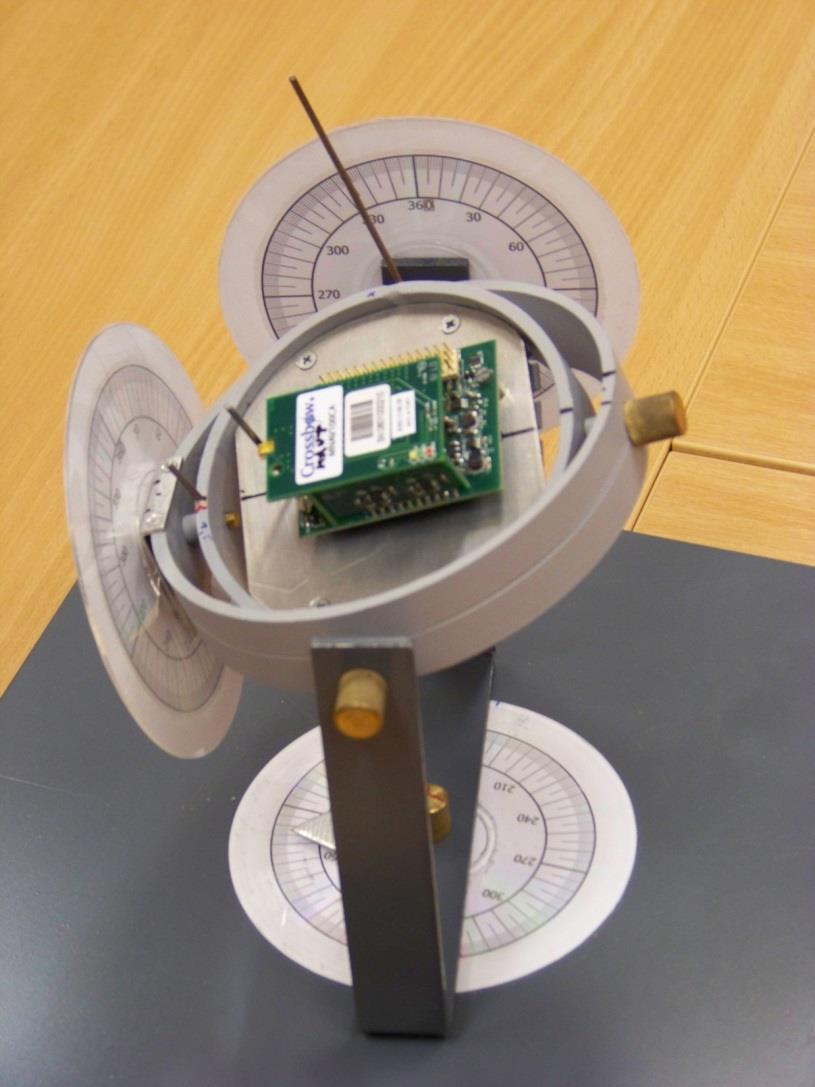
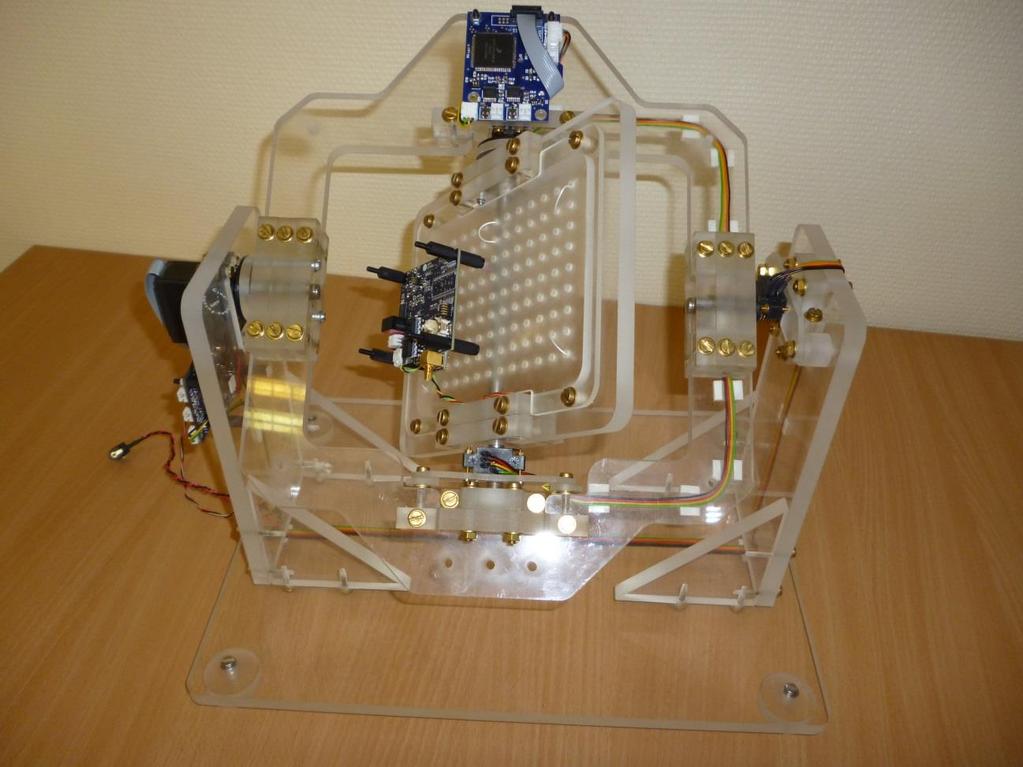
11 Szenzorok kalibrálása
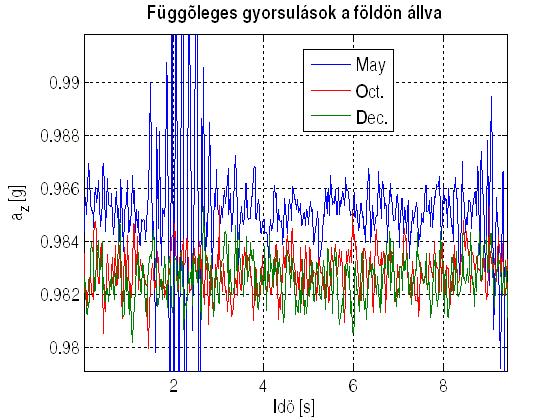
12 Hőmérsékleti kalibrálás
13 Rendszer identifikáció mérésekből

14 Szabályozási feladatok Stabilizáló szabályzás (bedöntés, bólintás) Szög referenciajelek követése Sebesség / magasság tartás Útvonal pontok, vagy kötött útvonal követése Hibadetektálás, hibakorrigálás, rekonfiguráló szabályzás Phycore MPC555 / 40MHz Phycore MPC5200 / 400MHz




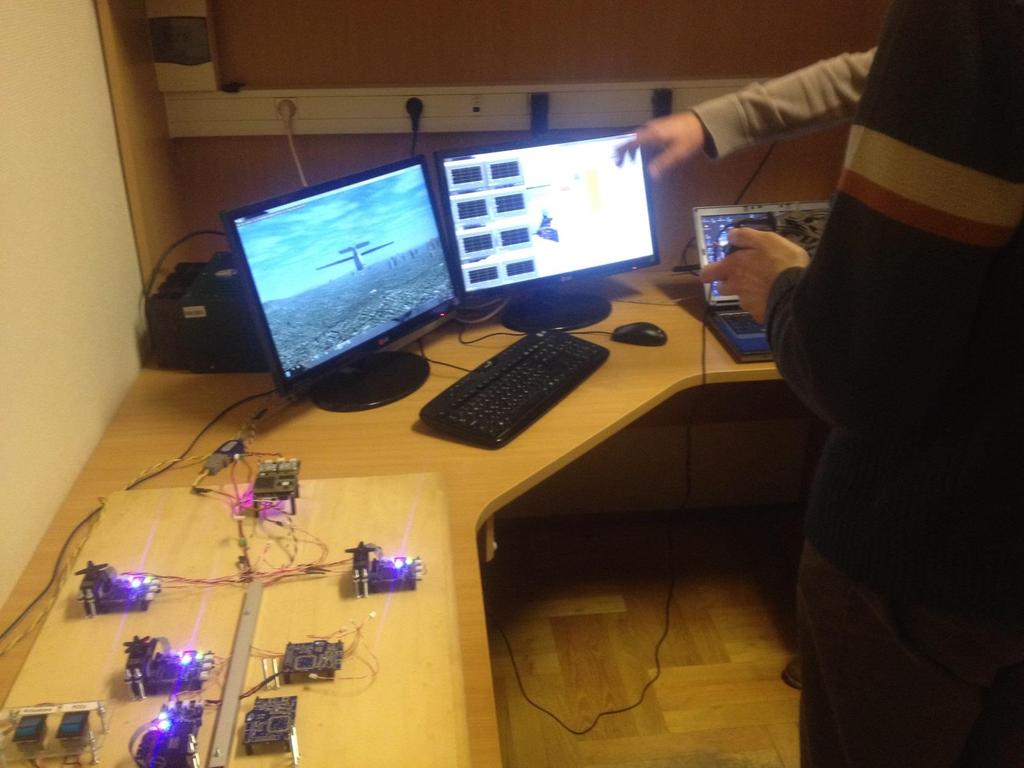
15 Hardware-in-the-loop szimuláció felépítése 40 MHz antenna PPM vevő csűrő 40 MHz FM Fedélzeti számítógép PWM jelek MUX magassági korm. 2.4 GHz antenna PhyCore MPC555 PWM jelek oldalkormány Vezeték nélküli modem soros vonal Szenzor egység + repülőgép Földi állomás Digi XStream 2.4 GHz

16 Menjünk repülni!
17 Szögtartás és követés

18 GPS koordináták közti repülés
19 Kutató-mentő útvonal követése szimulációban

20 Kutató-mentő útvonal követése a valóságban


21 És a megbízhatóság? Egyszeres, vagy kétszeres hardware rendszer? 96-97%-os hibadetektálás érhető el napjainkban

22 Kétszerezett rendszer vázlata



23 Új aktuátorok Saját intelligenciával rendelkező önálló egységek, hiba diagnosztikával és korrekcióval, ha lehetséges Integrated modular avionics (IMA) koncepció
24 HIL szimuláció
25 Útvonal követés hibadetektálással

26 És ha már jól repülünk az elég?
 repülőgép felderítése (radar / kamera) Relatív")

27 Érzékelés és elkerülés ONR (USA) program, célok: A másik (közeli) repülőgép felderítése (radar / kamera) Relatív pozíció és sebesség becslése, veszélyesség eldöntése Elkerülő manőver, a gép által végrehajtható tartományon belül

28 Érzékelés és elkerülés 2. intruder own distant waypoint intruder own aircraft
29 Érzékelés és elkerülés 3. emd N emd D estimated position of intruder at encounter point selected maneuver


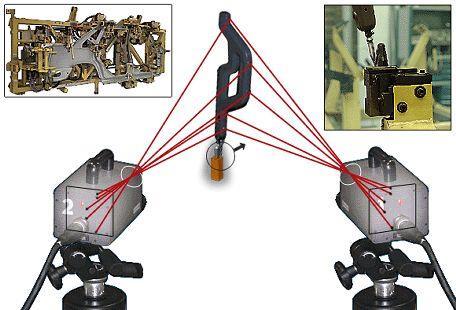


30 Beltéri pozícionáló rendszer Ultrahangos rendszer Kamerás rendszer GPS
31 Beltéri pozícionáló rendszer 2. Fototranzisztor Fototranzisztor LCD LCD LED LED
32 LED követés folyamata Fototranzisztorok LED LCD
33 LED követés folyamata Fototranzisztorok LED LCD
34 LED követés folyamata Fototranzisztorok LED LCD



35 Az elkészült pozíció érzékelő TFT modul Szenzor modul Kommunikációs modul Tápellátás modul


36 A helikopter Koaxiális konfiguráció Imbolygótárcsát mozgató szervók Fedélzeti elektronika LED marker Meghajtó motorok





37 Általános struktúra Duplex rádió kommunikáció a PC és a helikopter között Gázkar állás Bólintó és orsózó beavatkozás Irány referencia Mágneses & Gyro szenzor Fedélzeti iránykontroll CAN busz alapú kommunikáció a pozíció szenzorok és a PC között PC futtatja a magasság és pozíció kontrollt
38 Köszönöm szépen a figyelmet!
UAV fejlesztések és kutatás
 UAV fejlesztések és kutatás MTA-SZTAKI Rendszer- és Irányításelméleti Kutatólaboratórium Prof. Bokor József (bokor@sztaki.hu), Vanek Bálint, Bauer Péter (bauer.peter@sztaki.mta.hu ), Gőzse István (gozse.istvan@sztaki.mta.hu
UAV fejlesztések és kutatás MTA-SZTAKI Rendszer- és Irányításelméleti Kutatólaboratórium Prof. Bokor József (bokor@sztaki.hu), Vanek Bálint, Bauer Péter (bauer.peter@sztaki.mta.hu ), Gőzse István (gozse.istvan@sztaki.mta.hu
VTOL UAV. Moduláris fedélzeti elektronika fejlesztése pilóta nélküli repülőgépek számára. Árvai László, Doktorandusz, ZMNE ÁRVAI LÁSZLÓ, ZMNE
 Moduláris fedélzeti elektronika fejlesztése pilóta nélküli repülőgépek számára Árvai László, Doktorandusz, ZMNE Tartalom Fejezet Témakör 1. Fedélzeti elektronika tulajdonságai 2. Modularitás 3. Funkcionális
Moduláris fedélzeti elektronika fejlesztése pilóta nélküli repülőgépek számára Árvai László, Doktorandusz, ZMNE Tartalom Fejezet Témakör 1. Fedélzeti elektronika tulajdonságai 2. Modularitás 3. Funkcionális
Beltéri autonóm négyrotoros helikopter szabályozó rendszerének kifejlesztése és hardware-in-the-loop tesztelése
 Beltéri autonóm négyrotoros helikopter szabályozó rendszerének kifejlesztése és hardware-in-the-loop tesztelése Regula Gergely, Lantos Béla BME Villamosmérnöki és Informatikai Kar Irányítástechnika és
Beltéri autonóm négyrotoros helikopter szabályozó rendszerének kifejlesztése és hardware-in-the-loop tesztelése Regula Gergely, Lantos Béla BME Villamosmérnöki és Informatikai Kar Irányítástechnika és
Űrtechnológia október 24. Műholdfedélzeti energiaellátás / 2 Műholdfedélzeti szolgálati rendszerek Felügyeleti, telemetria és telekommand rendsz
 Szélessávú Hírközlés és Villamosságtan Tanszék Űrkutató Csoport Szabó József A fedélzeti energiaellátás kérdései: architektúrák, energiaegyensúly. Űrtechnológia Budapest, 2018. október 24. Űrtechnológia
Szélessávú Hírközlés és Villamosságtan Tanszék Űrkutató Csoport Szabó József A fedélzeti energiaellátás kérdései: architektúrák, energiaegyensúly. Űrtechnológia Budapest, 2018. október 24. Űrtechnológia
Prof. Bokor József az MTA rendes tagja
 Rendszer és Irányításelméleti Kutató Labor Laborvezető: Prof. Bokor József az MTA rendes tagja Beágyazott és Autonóm Rendszerek Labor Vezető: Soumelidis Alexandros, PhD Kutatók: Edelmayer András, MTA Dr
Rendszer és Irányításelméleti Kutató Labor Laborvezető: Prof. Bokor József az MTA rendes tagja Beágyazott és Autonóm Rendszerek Labor Vezető: Soumelidis Alexandros, PhD Kutatók: Edelmayer András, MTA Dr
 Szélessávú Hírközlés és Villamosságtan Tanszék Űrkutató Csoport Szabó József A fedélzeti energiaellátás kérdései: architektúrák, energiaegyensúly. Űrtechnológia Budapest, 2014. március 19. Űrtechnológia
Szélessávú Hírközlés és Villamosságtan Tanszék Űrkutató Csoport Szabó József A fedélzeti energiaellátás kérdései: architektúrák, energiaegyensúly. Űrtechnológia Budapest, 2014. március 19. Űrtechnológia
Szárazföldi autonóm mobil robotok vezérlőrendszerének kialakítási lehetőségei. Kucsera Péter ZMNE Doktorandusz
 Szárazföldi autonóm mobil robotok vezérlőrendszerének kialakítási lehetőségei. Kucsera Péter ZMNE Doktorandusz A mobil robot vezérlőrendszerének feladatai Elvégzendő feladat Kommunikáció Vezérlő rendszer
Szárazföldi autonóm mobil robotok vezérlőrendszerének kialakítási lehetőségei. Kucsera Péter ZMNE Doktorandusz A mobil robot vezérlőrendszerének feladatai Elvégzendő feladat Kommunikáció Vezérlő rendszer
HIL SZIMULÁCIÓ ROBOTPILÓTA FEJLESZTÉSBEN
 Dr. Molnár András - Stojcsics Dániel HIL SZIMULÁCIÓ ROBOTPILÓTA FEJLESZTÉSBEN Bevezető Pilóta nélküli robotrepülőgéppel végzett kutatás és fejlesztés elengedhetetlen része a tesztelés. Az időjárási feltételek
Dr. Molnár András - Stojcsics Dániel HIL SZIMULÁCIÓ ROBOTPILÓTA FEJLESZTÉSBEN Bevezető Pilóta nélküli robotrepülőgéppel végzett kutatás és fejlesztés elengedhetetlen része a tesztelés. Az időjárási feltételek
A repülés világa a motoros repülőgépektől a drónokig.
 A repülés világa a motoros repülőgépektől a drónokig. 1903. a kezdet. tíznél alig több másodpercig a levegőben repült a REPÜLŐGÉP Néhány adat: Motor: 12 LE, vízhűtéses benzinmotor Fesztáv: 12.3 méter Hossz:
A repülés világa a motoros repülőgépektől a drónokig. 1903. a kezdet. tíznél alig több másodpercig a levegőben repült a REPÜLŐGÉP Néhány adat: Motor: 12 LE, vízhűtéses benzinmotor Fesztáv: 12.3 méter Hossz:
1 csűrő 1 csűrő 2 magassági 2 magassági 3 gáz 3 gáz 4 oldalkormány 4 oldalkormány 5 Robot üzemmód 5 csűrő
 RC csatlakozók A csatlakozók kiosztása. Figyelem, a Gnd (föld, fekete) tüskéi felül vannak! RC input RC output 1 2 3 4 5 1 2 3 4 5 SP Gnd 5V Signal A robot 5 tel (RC input) és 5 tel (RC output) rendelkezik.
RC csatlakozók A csatlakozók kiosztása. Figyelem, a Gnd (föld, fekete) tüskéi felül vannak! RC input RC output 1 2 3 4 5 1 2 3 4 5 SP Gnd 5V Signal A robot 5 tel (RC input) és 5 tel (RC output) rendelkezik.
Multifunkciós pilóta nélküli repülőgépek fejlesztési eredményei a BHE Kft-nél
 Multifunkciós pilóta nélküli repülőgépek fejlesztési eredményei a BHE Kft-nél Dr. Kazi Károly, Mikó Gyula 2014. november 21. BHE Bonn Hungary Elektronikai Kft. Történet: Megalapítás 1991-ben Kezdetben
Multifunkciós pilóta nélküli repülőgépek fejlesztési eredményei a BHE Kft-nél Dr. Kazi Károly, Mikó Gyula 2014. november 21. BHE Bonn Hungary Elektronikai Kft. Történet: Megalapítás 1991-ben Kezdetben
A fejlődés folytatódik
 ~ Szepessy Kornél vezérigazgató A fejlődés folytatódik Nemzeti Közlekedési Napok 2014. október 28. Elmúlt négy év eredményei ANS III projekt technikai-technológiai megújulás, MATIAS KFOR szektor megnyitása
~ Szepessy Kornél vezérigazgató A fejlődés folytatódik Nemzeti Közlekedési Napok 2014. október 28. Elmúlt négy év eredményei ANS III projekt technikai-technológiai megújulás, MATIAS KFOR szektor megnyitása
Élettartam teszteknél alkalmazott programstruktúra egy váltóvezérlő példáján keresztül
 Élettartam teszteknél alkalmazott programstruktúra egy váltóvezérlő példáján keresztül 1 Tartalom Miről is lesz szó? Bosch GS-TC Automata sebességváltó TCU (Transmission Control Unit) Élettartam tesztek
Élettartam teszteknél alkalmazott programstruktúra egy váltóvezérlő példáján keresztül 1 Tartalom Miről is lesz szó? Bosch GS-TC Automata sebességváltó TCU (Transmission Control Unit) Élettartam tesztek
SZIMULÁCIÓ ÉS MODELLEZÉS AZ ANSYS ALKALMAZÁSÁVAL
 SZIMULÁCIÓ ÉS MODELLEZÉS AZ ANSYS ALKALMAZÁSÁVAL MAGYAR TUDOMÁNY NAPJA KONFERENCIA 2010 GÁBOR DÉNES FŐISKOLA CSUKA ANTAL TARTALOM A KÍSÉRLET ÉS MÉRÉS JELENTŐSÉGE A MÉRNÖKI GYAKORLATBAN, MECHANIKAI FESZÜLTSÉG
SZIMULÁCIÓ ÉS MODELLEZÉS AZ ANSYS ALKALMAZÁSÁVAL MAGYAR TUDOMÁNY NAPJA KONFERENCIA 2010 GÁBOR DÉNES FŐISKOLA CSUKA ANTAL TARTALOM A KÍSÉRLET ÉS MÉRÉS JELENTŐSÉGE A MÉRNÖKI GYAKORLATBAN, MECHANIKAI FESZÜLTSÉG
zturbinák kompresszorának akusztikus
 Mikro-gázturbin zturbinák kompresszorának akusztikus pompázs detektálása Koncz Miklós s Tamás, PhD ROBOTWARFARE 9 1 Gazdaságos egyensúlyozó gép tervezése pilóta nélküli repülőgépek gázturbinájához Koncz
Mikro-gázturbin zturbinák kompresszorának akusztikus pompázs detektálása Koncz Miklós s Tamás, PhD ROBOTWARFARE 9 1 Gazdaságos egyensúlyozó gép tervezése pilóta nélküli repülőgépek gázturbinájához Koncz
ÉRZÉKELŐK ÉS BEAVATKOZÓK I. 0. TANTÁRGY ISMERTETŐ
 ÉRZÉKELŐK ÉS BEAVATKOZÓK I. 0. TANTÁRGY ISMERTETŐ Dr. Soumelidis Alexandros 2018.09.06. BME KÖZLEKEDÉSMÉRNÖKI ÉS JÁRMŰMÉRNÖKI KAR 32708-2/2017/INTFIN SZÁMÚ EMMI ÁLTAL TÁMOGATOTT TANANYAG A tárgy célja
ÉRZÉKELŐK ÉS BEAVATKOZÓK I. 0. TANTÁRGY ISMERTETŐ Dr. Soumelidis Alexandros 2018.09.06. BME KÖZLEKEDÉSMÉRNÖKI ÉS JÁRMŰMÉRNÖKI KAR 32708-2/2017/INTFIN SZÁMÚ EMMI ÁLTAL TÁMOGATOTT TANANYAG A tárgy célja
Autonóm járműrendszerek kutatása a zalaegerszegi autonóm tesztpályához kapcsolódóan. Pályázati témák (3) Téma rövid tartalma
 Téma rövid tartalma") Pályázati témák (3) 1 Mesterséges intelligencia alapú döntési modellek fejlesztése és tesztelése valós autonóm járműves környezetben Szimulációs környezetben kifejlesztett döntési modellek vizsgálata valós
Pályázati témák (3) 1 Mesterséges intelligencia alapú döntési modellek fejlesztése és tesztelése valós autonóm járműves környezetben Szimulációs környezetben kifejlesztett döntési modellek vizsgálata valós
HCE80/HCC80/HCE80R/HCC80R
 HCE80/HCC80/HCE80R/HCC80R PADLÓFŰTÉSI ZÓNA SZABÁLYZÓK TERMÉK LEÍRÁS TULAJDONSÁGOK Könnyű és gyors telepítés az új vezetékezéssel Dugaszolható csatlakozók kábelszorítóval Integrált szivattyú relé a szivattyú
HCE80/HCC80/HCE80R/HCC80R PADLÓFŰTÉSI ZÓNA SZABÁLYZÓK TERMÉK LEÍRÁS TULAJDONSÁGOK Könnyű és gyors telepítés az új vezetékezéssel Dugaszolható csatlakozók kábelszorítóval Integrált szivattyú relé a szivattyú
Autonóm jármű forgalomszimulátorba illesztése
 Autonóm jármű forgalomszimulátorba illesztése Szalai Mátyás 2018 Konzulens: Dr. Tettamanti Tamás A szimulációs feladat Miért hasznos? Biztonságos környezetben nyújt lehetőséget az autonóm járművek forgalmi
Autonóm jármű forgalomszimulátorba illesztése Szalai Mátyás 2018 Konzulens: Dr. Tettamanti Tamás A szimulációs feladat Miért hasznos? Biztonságos környezetben nyújt lehetőséget az autonóm járművek forgalmi
VTOL UAV. Inerciális mérőrendszer kiválasztása vezetőnélküli repülőeszközök számára. Árvai László, Doktorandusz, ZMNE
 Inerciális mérőrendszer kiválasztása vezetőnélküli repülőeszközök számára Árvai László, Doktorandusz, ZMNE Tartalom Fejezet Témakör 1. Vezető nélküli repülőeszközök 2. Inerciális mérőrendszerek feladata
Inerciális mérőrendszer kiválasztása vezetőnélküli repülőeszközök számára Árvai László, Doktorandusz, ZMNE Tartalom Fejezet Témakör 1. Vezető nélküli repülőeszközök 2. Inerciális mérőrendszerek feladata
Ember és robot együttműködése a gyártásban Ipar 4.0
 Helyszín: MTA Székház, Felolvasóterem Időpont: 2017. November 7. Ember és robot együttműködése a gyártásban Ipar 4.0 Dr. Erdős Ferenc Gábor MTA SZTAKI Fejlett robotika ígérete A fejlett robotika és az
Helyszín: MTA Székház, Felolvasóterem Időpont: 2017. November 7. Ember és robot együttműködése a gyártásban Ipar 4.0 Dr. Erdős Ferenc Gábor MTA SZTAKI Fejlett robotika ígérete A fejlett robotika és az
Valódi mérések virtuális műszerekkel
 Valódi mérések virtuális műszerekkel Kopasz Katalin, Dr. Makra Péter, Dr. Gingl Zoltán SZTE TTIK Kísérleti Fizikai Tanszék A legfontosabb célok Kísérletezéses oktatás támogatása Egyetlen eszköz, mégis
Valódi mérések virtuális műszerekkel Kopasz Katalin, Dr. Makra Péter, Dr. Gingl Zoltán SZTE TTIK Kísérleti Fizikai Tanszék A legfontosabb célok Kísérletezéses oktatás támogatása Egyetlen eszköz, mégis
Gingl Zoltán, Szeged, 2015. 2015.09.29. 19:14 Elektronika - Alapok
 Gingl Zoltán, Szeged, 2015. 1 2 Az előadás diasora (előre elérhető a teljes anyag, fejlesztések mindig történnek) Könyv: Török Miklós jegyzet Tiezte, Schenk, könyv interneten elérhető anyagok Laborjegyzet,
Gingl Zoltán, Szeged, 2015. 1 2 Az előadás diasora (előre elérhető a teljes anyag, fejlesztések mindig történnek) Könyv: Török Miklós jegyzet Tiezte, Schenk, könyv interneten elérhető anyagok Laborjegyzet,
Beszámoló szakképzési hozzájárulási támogatás felhasználásáról
 Beszámoló szakképzési hozzájárulási támogatás felhasználásáról Támogató: HungaroControl Magyar Légiforgalmi Szolgálat Zártkörűen Működő Részvénytársaság, 1185 Budapest, Igló u. 33-35. Támogatás összege:
Beszámoló szakképzési hozzájárulási támogatás felhasználásáról Támogató: HungaroControl Magyar Légiforgalmi Szolgálat Zártkörűen Működő Részvénytársaság, 1185 Budapest, Igló u. 33-35. Támogatás összege:
Automatikus Fedélzeti Irányító Rendszerek. Navigációs rendszerek a pilóta szemszögéből Tóth Gábor
 Automatikus Fedélzeti Irányító Rendszerek Navigációs rendszerek a pilóta szemszögéből Tóth Gábor VFR Visual Flight Rules A navigáció folyamatos földlátást igényel Minimálisan 5 km látástávolság szükséges
Automatikus Fedélzeti Irányító Rendszerek Navigációs rendszerek a pilóta szemszögéből Tóth Gábor VFR Visual Flight Rules A navigáció folyamatos földlátást igényel Minimálisan 5 km látástávolság szükséges
Kisgépes események vizsgálatai
 Kisgépes események vizsgálatai Mezei József Balesetvizsgáló gyakornok Kifogyott tüzelőanyag események 3 2 2 1 1 1 1 2012 2013 2014 2015 2016 2017 2018 2 Cessna 150 a kinyerhető tüzelőanyag mennyisége:
Kisgépes események vizsgálatai Mezei József Balesetvizsgáló gyakornok Kifogyott tüzelőanyag események 3 2 2 1 1 1 1 2012 2013 2014 2015 2016 2017 2018 2 Cessna 150 a kinyerhető tüzelőanyag mennyisége:
pek a Magyar Honvéds
 ZRÍNYI MIKLÓS NEMZETVÉDELMI EGYETEM Bolyai János Katonai Műszaki Kar Információs Műveletek és Elektronikai Hadviselés Tanszék Szárazf razföldi robotok és pilóta nélkn lküli li repülőgépek pek a Magyar
ZRÍNYI MIKLÓS NEMZETVÉDELMI EGYETEM Bolyai János Katonai Műszaki Kar Információs Műveletek és Elektronikai Hadviselés Tanszék Szárazf razföldi robotok és pilóta nélkn lküli li repülőgépek pek a Magyar
Irányító és kommunikációs rendszerek III. Előadás 13
 Irányító és kommunikációs rendszerek III. Előadás 13 GSM-R Flottamenedzsment Mobil fizetési lehetőségek Parkolási díj Útdíj A GSM közlekedési felhasználása Valós idejű információs szolgáltatás Közlekedési
Irányító és kommunikációs rendszerek III. Előadás 13 GSM-R Flottamenedzsment Mobil fizetési lehetőségek Parkolási díj Útdíj A GSM közlekedési felhasználása Valós idejű információs szolgáltatás Közlekedési
SHARKY 775 ULTRAHANGOS KOMPAKT HŐMENNYISÉGMÉRŐ
 ULTRAHANGOS KOMPAKT HŐMENNYISÉGMÉRŐ ALKALMAZÁSI TERÜLET A kompakt ultrahangos hőmennyiségmérő hosszú távon, extrém körülmények között is biztosítja a maximális pontosságot a hőenergia mérésben, az egészen
ULTRAHANGOS KOMPAKT HŐMENNYISÉGMÉRŐ ALKALMAZÁSI TERÜLET A kompakt ultrahangos hőmennyiségmérő hosszú távon, extrém körülmények között is biztosítja a maximális pontosságot a hőenergia mérésben, az egészen
IoT cunami. Technológiai szökőár vagy harc az infrastruktúra szolgáltatásért?
 IoT cunami Technológiai szökőár vagy harc az infrastruktúra szolgáltatásért? MOHAnet Mobilsystems Zrt. - Cím: 1152 Budapest, Telek utca 7-9. - Tel.: +36 (1) 271-1141 - Web: www.mohanet.com - E-mail: info@mohanet.com
IoT cunami Technológiai szökőár vagy harc az infrastruktúra szolgáltatásért? MOHAnet Mobilsystems Zrt. - Cím: 1152 Budapest, Telek utca 7-9. - Tel.: +36 (1) 271-1141 - Web: www.mohanet.com - E-mail: info@mohanet.com
Mozgó jármű helyzetének és tájolásának meghatározása alacsony árú GNSS és inerciális érzékelők szoros csatolású integrációjával
 Mozgó jármű helyzetének és tájolásának meghatározása alacsony árú GNSS és inerciális érzékelők szoros csatolású integrációjával Farkas Márton Rédey István Geodéziai Szeminárium 2019. április 2. Áttekintés
Mozgó jármű helyzetének és tájolásának meghatározása alacsony árú GNSS és inerciális érzékelők szoros csatolású integrációjával Farkas Márton Rédey István Geodéziai Szeminárium 2019. április 2. Áttekintés
Dinamikus terhelés hatására létrejövő deformáció mérése. Dr. Siki Zoltán Moka Dániel BME Általános- és Felsőgeodézia tanszék siki@agt.bme.
 Dinamikus terhelés hatására létrejövő deformáció mérése Dr. Siki Zoltán Moka Dániel BME Általános- és Felsőgeodézia tanszék siki@agt.bme.hu Áttekintés Előzmények A rendszer komponensei Alkalmazási példák
Dinamikus terhelés hatására létrejövő deformáció mérése Dr. Siki Zoltán Moka Dániel BME Általános- és Felsőgeodézia tanszék siki@agt.bme.hu Áttekintés Előzmények A rendszer komponensei Alkalmazási példák
A rendszer legfontosabb jellemzőit az alábbiakban foglalhatjuk össze:
 GPS nyomkövető készülék, illetve navigációs rendszerek A GPS a Global Positioning System angol rövidítése és globális helymeghatározó rendszert jelent. Egy rendszer, amely 24 műholdból áll, melyet az USA
GPS nyomkövető készülék, illetve navigációs rendszerek A GPS a Global Positioning System angol rövidítése és globális helymeghatározó rendszert jelent. Egy rendszer, amely 24 műholdból áll, melyet az USA
MIKROFYN GÉPVEZÉRLÉSEK. 2D megoldások:
 MIKROFYN GÉPVEZÉRLÉSEK Néhány szó a gyártóról: Az 1987-es kezdés óta a Mikrofyn A/S a világ öt legnagyobb precíziós lézer és gépvezérlés gyártója közé lépett. A profitot visszaforgatta az új termékek fejlesztésébe
MIKROFYN GÉPVEZÉRLÉSEK Néhány szó a gyártóról: Az 1987-es kezdés óta a Mikrofyn A/S a világ öt legnagyobb precíziós lézer és gépvezérlés gyártója közé lépett. A profitot visszaforgatta az új termékek fejlesztésébe
MAGYAR REPÜLŐ SZÖVETSÉG REPÜLÉSBIZTONSÁGI SZOLGÁLAT ZÁRÓJELENTÉS. 2005-150 sorszámú LÉGIKÖZLEKEDÉSI ESEMÉNYHEZ
 MRSZ-REBISZ eseményszám: MRSZ -001-05 MAGYAR REPÜLŐ SZÖVETSÉG REPÜLÉSBIZTONSÁGI SZOLGÁLAT ZÁRÓJELENTÉS 2005-150 sorszámú LÉGIKÖZLEKEDÉSI ESEMÉNYHEZ Az esemény helye: Budakeszi Az esemény ideje: 2005. 07.
MRSZ-REBISZ eseményszám: MRSZ -001-05 MAGYAR REPÜLŐ SZÖVETSÉG REPÜLÉSBIZTONSÁGI SZOLGÁLAT ZÁRÓJELENTÉS 2005-150 sorszámú LÉGIKÖZLEKEDÉSI ESEMÉNYHEZ Az esemény helye: Budakeszi Az esemény ideje: 2005. 07.
1. Metrológiai alapfogalmak. 2. Egységrendszerek. 2.0 verzió
 Mérés és adatgyűjtés - Kérdések 2.0 verzió Megjegyzés: ezek a kérdések a felkészülést szolgálják, nem ezek lesznek a vizsgán. Ha valaki a felkészülése alapján önállóan válaszolni tud ezekre a kérdésekre,
Mérés és adatgyűjtés - Kérdések 2.0 verzió Megjegyzés: ezek a kérdések a felkészülést szolgálják, nem ezek lesznek a vizsgán. Ha valaki a felkészülése alapján önállóan válaszolni tud ezekre a kérdésekre,
Autóipari vezérlőegységek aktív környezetállósági tesztelésének módszerei
 Autóipari vezérlőegységek aktív környezetállósági tesztelésének módszerei Aradi Szilárd PhD témavezető: Dr. Gyenes Károly Közlekedés és járműirányítás workshop BME 2011 ISBN 978-963-420-975-1 Bevezetés
Autóipari vezérlőegységek aktív környezetállósági tesztelésének módszerei Aradi Szilárd PhD témavezető: Dr. Gyenes Károly Közlekedés és járműirányítás workshop BME 2011 ISBN 978-963-420-975-1 Bevezetés
CORONA ER TÖBBSUGARAS ELEKTRONIKUS VÍZMÉRŐ
 ALKALMAZÁSI TERÜLET Teljesen elektronikus szárnykerekes vízmérő beépített rádiómodullal, hideg- és melegvíz felhasználás mérésére. Nagyon pontos adatrögzítés minden számlázási adatról 90 C közeghőmérsékletig.
ALKALMAZÁSI TERÜLET Teljesen elektronikus szárnykerekes vízmérő beépített rádiómodullal, hideg- és melegvíz felhasználás mérésére. Nagyon pontos adatrögzítés minden számlázási adatról 90 C közeghőmérsékletig.
T/2918. számú. törvényjavaslat
 MAGYAR KÖZTÁRSASÁG KORMÁNYA T/2918. számú törvényjavaslat a nemzetközi polgári repülésről Chicagóban, az 1944. évi december hó 7. napján aláírt Egyezmény Függelékeinek kihirdetéséről Előadó: Dr. Kóka János
MAGYAR KÖZTÁRSASÁG KORMÁNYA T/2918. számú törvényjavaslat a nemzetközi polgári repülésről Chicagóban, az 1944. évi december hó 7. napján aláírt Egyezmény Függelékeinek kihirdetéséről Előadó: Dr. Kóka János
A debreceni alapéghajlati állomás, az OMSZ háttérklíma hálózatának bővített mérési programmal rendelkező mérőállomása
 1 A debreceni alapéghajlati állomás, az OMSZ háttérklíma hálózatának bővített mérési programmal rendelkező mérőállomása Nagy Zoltán Dr. Szász Gábor Debreceni Brúnó OMSZ Megfigyelési Főosztály Debreceni
1 A debreceni alapéghajlati állomás, az OMSZ háttérklíma hálózatának bővített mérési programmal rendelkező mérőállomása Nagy Zoltán Dr. Szász Gábor Debreceni Brúnó OMSZ Megfigyelési Főosztály Debreceni
BHE UAS rendszer bemutatása
 BHE UAS rendszer bemutatása Mikó Gyula Képfeldolgozás UAS technológiákhoz nyílt forráskódú és kis költségű szoftverekkel Földmérési és Távérzékelési Intézet 2013. május 14. BHE Bonn Hungary Elektronikai
BHE UAS rendszer bemutatása Mikó Gyula Képfeldolgozás UAS technológiákhoz nyílt forráskódú és kis költségű szoftverekkel Földmérési és Távérzékelési Intézet 2013. május 14. BHE Bonn Hungary Elektronikai
Murinkó Gergő
 2018.10.10 Murinkó Gergő P r o f e s s z i o n á l i s K ö z m ű k e r e s ő k 2 - Munkabiztonság - Eltakart értékek védelme - Feltárások felgyorsítása Kérdések és válaszok? - Milyen anyagú cső, milyen
2018.10.10 Murinkó Gergő P r o f e s s z i o n á l i s K ö z m ű k e r e s ő k 2 - Munkabiztonság - Eltakart értékek védelme - Feltárások felgyorsítása Kérdések és válaszok? - Milyen anyagú cső, milyen
Geopanama, a vízidrón
 Geopanama, a vízidrón Stenzel Sándor Geodézia Zrt. Borsod-Abaúj-Zemplén Megyei Kormányhivatal Földhivatala Földmérési Szakmai Nap Miskolc, 2014. November 05. mégis, mik azok a drónok? Elnevezés: Drone
Geopanama, a vízidrón Stenzel Sándor Geodézia Zrt. Borsod-Abaúj-Zemplén Megyei Kormányhivatal Földhivatala Földmérési Szakmai Nap Miskolc, 2014. November 05. mégis, mik azok a drónok? Elnevezés: Drone
ÉRZÉKELŐK ÉS BEAVATKOZÓK I. 3. MÉRÉSFELDOLGOZÁS
 ÉRZÉKELŐK ÉS BEAVATKOZÓK I. 3. MÉRÉSFELDOLGOZÁS Dr. Soumelidis Alexandros 2018.10.04. BME KÖZLEKEDÉSMÉRNÖKI ÉS JÁRMŰMÉRNÖKI KAR 32708-2/2017/INTFIN SZÁMÚ EMMI ÁLTAL TÁMOGATOTT TANANYAG Mérés-feldolgozás
ÉRZÉKELŐK ÉS BEAVATKOZÓK I. 3. MÉRÉSFELDOLGOZÁS Dr. Soumelidis Alexandros 2018.10.04. BME KÖZLEKEDÉSMÉRNÖKI ÉS JÁRMŰMÉRNÖKI KAR 32708-2/2017/INTFIN SZÁMÚ EMMI ÁLTAL TÁMOGATOTT TANANYAG Mérés-feldolgozás
ÉRZÉKELŐK ÉS BEAVATKOZÓK I. PÉLDÁK - FELADATOK
 ÉRZÉKELŐK ÉS BEAVATKOZÓK I. PÉLDÁK - FELADATOK Dr. Soumelidis Alexandros 2018.09.06. BME KÖZLEKEDÉSMÉRNÖKI ÉS JÁRMŰMÉRNÖKI KAR 32708-2/2017/INTFIN SZÁMÚ EMMI ÁLTAL TÁMOGATOTT TANANYAG Idei fő példafeladat:
ÉRZÉKELŐK ÉS BEAVATKOZÓK I. PÉLDÁK - FELADATOK Dr. Soumelidis Alexandros 2018.09.06. BME KÖZLEKEDÉSMÉRNÖKI ÉS JÁRMŰMÉRNÖKI KAR 32708-2/2017/INTFIN SZÁMÚ EMMI ÁLTAL TÁMOGATOTT TANANYAG Idei fő példafeladat:
Korszerű mérési és irányítási módszerek városi közúti közlekedési hálózatban
 Korszerű mérési és irányítási módszerek városi közúti közlekedési hálózatban Dr. Tettamanti Tamás BME Közlekedés- és Járműirányítási Tanszék 2013. november. 13. MTA KTB ünnepi tudományos ülése 1 A közlekedési
Korszerű mérési és irányítási módszerek városi közúti közlekedési hálózatban Dr. Tettamanti Tamás BME Közlekedés- és Járműirányítási Tanszék 2013. november. 13. MTA KTB ünnepi tudományos ülése 1 A közlekedési
SVANTEK. Termékismertető
 SVANTEK Termékismertető Zajszintmérő analizátor SVAN 979 1. pontossági osztály Alacsony belső zaj
SVANTEK Termékismertető Zajszintmérő analizátor SVAN 979 1. pontossági osztály Alacsony belső zaj
Interferencia jelenségek a BME permanens állomásán
 Interferencia jelenségek a BME permanens állomásán Takács Bence, egyetemi docens takacs.bence@epito.bme.hu Rédey szeminárium 2017. március 3. Nagy teljesítményű blokkolók hatótávolság : 200 km adó teljesítmény
Interferencia jelenségek a BME permanens állomásán Takács Bence, egyetemi docens takacs.bence@epito.bme.hu Rédey szeminárium 2017. március 3. Nagy teljesítményű blokkolók hatótávolság : 200 km adó teljesítmény
Drónok alkalmazása a katasztrófavédelemben. Készítette: Dr. Restás Ágoston Budapest, február 23.
 Drónok alkalmazása a katasztrófavédelemben Tartalom A kezdetek, avagy egy kis történeti áttekintés - ami eddig történt az előadó szemszögéből A drónok és szinonimáinak osztályozása, képességeik A katasztrófák
Drónok alkalmazása a katasztrófavédelemben Tartalom A kezdetek, avagy egy kis történeti áttekintés - ami eddig történt az előadó szemszögéből A drónok és szinonimáinak osztályozása, képességeik A katasztrófák
Elektromos pumpával és precíz nyomásszabályozással az ADT 761 hordozható automatikus nyomáskalibrátor ideális
 ADT761 Automata kalibrátor Automatikus előállítás 2,5 mbar - 40 bar határok között 0,02 0,05 %FS pontosság Két önálló modul Hordozható (5,6 kg) ISMERTETŐ Elektromos pumpával és precíz szabályozással az
ADT761 Automata kalibrátor Automatikus előállítás 2,5 mbar - 40 bar határok között 0,02 0,05 %FS pontosság Két önálló modul Hordozható (5,6 kg) ISMERTETŐ Elektromos pumpával és precíz szabályozással az
Termeléshatékonyság mérés Ipar 4.0 megoldásokkal a nyomdaiparban
 PRESENTATION Termeléshatékonyság mérés Ipar 4.0 megoldásokkal a nyomdaiparban Kremzer, Péter ICCS Kft. kremzerp@iccs.hu Tartalomjegyzék Folyamatirányítás FIR nélkül Nyomdai sajátosságok Megrendelői igények
PRESENTATION Termeléshatékonyság mérés Ipar 4.0 megoldásokkal a nyomdaiparban Kremzer, Péter ICCS Kft. kremzerp@iccs.hu Tartalomjegyzék Folyamatirányítás FIR nélkül Nyomdai sajátosságok Megrendelői igények
Intent Autodiga akció
 Intent Autodiga akció A2600 A-2600 Érintőképernyős autódiagnosztikai készülék, nyomtató funkció, MERCEDES, BMW, OPEL, VW / AUDI, MITSUBISHI, VOLVO stb... gépjárművekhez Gyári szintű diagnosztikai eljárásokhoz,
Intent Autodiga akció A2600 A-2600 Érintőképernyős autódiagnosztikai készülék, nyomtató funkció, MERCEDES, BMW, OPEL, VW / AUDI, MITSUBISHI, VOLVO stb... gépjárművekhez Gyári szintű diagnosztikai eljárásokhoz,
Intelligens Autonom Kamera Modul (IAKM)
") Intelligens Autonom Kamera Modul (IAKM) Célkitűzés A kamera egység legfőbb jellegzetességei: Önálló működésre; Nagyteljesítményű duális képfeldolgozó processzorokkal felszerelt; A képet kiértékelni képes;
Intelligens Autonom Kamera Modul (IAKM) Célkitűzés A kamera egység legfőbb jellegzetességei: Önálló működésre; Nagyteljesítményű duális képfeldolgozó processzorokkal felszerelt; A képet kiértékelni képes;
Programozó- készülék Kezelőkozol RT óra (pl. PC) Digitális bemenetek ROM memória Digitális kimenetek RAM memória Analóg bemenet Analóg kimenet
 Digitális bemenetek ROM memória Digitális kimenetek RAM memória Analóg bemenet Analóg kimenet") 2. ZH A csoport 1. Hogyan adható meg egy digitális műszer pontossága? (3p) Digitális műszereknél a pontosságot két adattal lehet megadni: Az osztályjel ±%-os értékével, és a ± digit értékkel (jellemző
2. ZH A csoport 1. Hogyan adható meg egy digitális műszer pontossága? (3p) Digitális műszereknél a pontosságot két adattal lehet megadni: Az osztályjel ±%-os értékével, és a ± digit értékkel (jellemző
REPÜLÉS A XX.-XXI. SZÁZADBAN
 REPÜLÉS A XX.-XXI. SZÁZADBAN 2016 Icaros és Daedeus A Leonardo-álom Működtető erők Orsózó nyomaték az X-tengely körül Legyező nyomaték az Z-tengely körül Bólintó nyomaték az Y-tengely körül 1903. a kezdet.
REPÜLÉS A XX.-XXI. SZÁZADBAN 2016 Icaros és Daedeus A Leonardo-álom Működtető erők Orsózó nyomaték az X-tengely körül Legyező nyomaték az Z-tengely körül Bólintó nyomaték az Y-tengely körül 1903. a kezdet.
WRC-15. A WRC-15 Rádiótávközlési Világértekezlet 1.5 és 1.16 napirendi pontjaira történő felkészülés helyzete. Koroncz László
 WRC-15 Koroncz László spektrumgazdálkodási mérnök Védelmi és Rendészeti Frekvenciagazdálkodási Főosztály Spektrumgazdálkodási és NATO Osztály A WRC-15 Rádiótávközlési Világértekezlet 1.5 és 1.16 napirendi
WRC-15 Koroncz László spektrumgazdálkodási mérnök Védelmi és Rendészeti Frekvenciagazdálkodási Főosztály Spektrumgazdálkodási és NATO Osztály A WRC-15 Rádiótávközlési Világértekezlet 1.5 és 1.16 napirendi
Gépjármű fekete doboz az útvonalrekonstrukció új eszközei
 Gépjármű fekete doboz az útvonalrekonstrukció új eszközei Dr. Melegh Gábor Budapesti Műszaki Egyetem Gépjárművek Tanszék H-1111 Budapest Stoczek u. 6 melegh@auto.bme.hu Dr. Szalay Zsolt Inventure Autóelektronikai
Gépjármű fekete doboz az útvonalrekonstrukció új eszközei Dr. Melegh Gábor Budapesti Műszaki Egyetem Gépjárművek Tanszék H-1111 Budapest Stoczek u. 6 melegh@auto.bme.hu Dr. Szalay Zsolt Inventure Autóelektronikai
SZENZORFÚZIÓS ELJÁRÁSOK KIDOLGOZÁSA AUTONÓM JÁRMŰVEK PÁLYAKÖVETÉSÉRE ÉS IRÁNYÍTÁSÁRA
 infokommunikációs technológiák SZENZORFÚZIÓS ELJÁRÁSOK KIDOLGOZÁSA AUTONÓM JÁRMŰVEK PÁLYAKÖVETÉSÉRE ÉS IRÁNYÍTÁSÁRA BEVEZETŐ A KUTATÁS CÉLJA Autonóm járművek és robotok esetén elsődleges feladat a robotok
infokommunikációs technológiák SZENZORFÚZIÓS ELJÁRÁSOK KIDOLGOZÁSA AUTONÓM JÁRMŰVEK PÁLYAKÖVETÉSÉRE ÉS IRÁNYÍTÁSÁRA BEVEZETŐ A KUTATÁS CÉLJA Autonóm járművek és robotok esetén elsődleges feladat a robotok
DHS Drone Hunter SYSTEMS 2019 Termékkatalógus polgári felhasználású frekvenciákra
 DHS Drone Hunter SYSTEMS 2019 Termékkatalógus polgári felhasználású frekvenciákra Drone Hunter Systems eszközeink 2019 évben új technikával, új tartalommal, új formákkal bővültek. A rendszerek, hálózatok,
DHS Drone Hunter SYSTEMS 2019 Termékkatalógus polgári felhasználású frekvenciákra Drone Hunter Systems eszközeink 2019 évben új technikával, új tartalommal, új formákkal bővültek. A rendszerek, hálózatok,
LEVEGŐKÉMIAI MÉRÉSEK ÉS MODELLEZÉS LOKÁLISTÓL REGIONÁLIS SKLÁLÁIG
 LEVEGŐKÉMIAI MÉRÉSEK ÉS MODELLEZÉS LOKÁLISTÓL REGIONÁLIS SKLÁLÁIG Mészáros Róbert 1, Leelőssy Ádám 1, Lagzi István 2, Kovács Attila 1 és Csapó Péter 1 1 Eötvös Loránd Tudományegyetem, Meteorológiai Tanszék,
LEVEGŐKÉMIAI MÉRÉSEK ÉS MODELLEZÉS LOKÁLISTÓL REGIONÁLIS SKLÁLÁIG Mészáros Róbert 1, Leelőssy Ádám 1, Lagzi István 2, Kovács Attila 1 és Csapó Péter 1 1 Eötvös Loránd Tudományegyetem, Meteorológiai Tanszék,
Közlekedésmérnöki és Jármőmérnöki Kar Közlekedés- és Jármőirányítási Tanszék
 Budapesti Mőszaki és Gazdaságtudományi Egyetem Közlekedésmérnöki és Jármőmérnöki Kar Közlekedés- és Jármőirányítási Tanszék ZÁRTHELYI DOLGOZATRA FELKÉSZÍTŐ KÉRDÉSEK LÉGIKÖZLEKEDÉSI IRÁNYÍTÓ ÉS KOMMUNIKÁCIÓS
Budapesti Mőszaki és Gazdaságtudományi Egyetem Közlekedésmérnöki és Jármőmérnöki Kar Közlekedés- és Jármőirányítási Tanszék ZÁRTHELYI DOLGOZATRA FELKÉSZÍTŐ KÉRDÉSEK LÉGIKÖZLEKEDÉSI IRÁNYÍTÓ ÉS KOMMUNIKÁCIÓS
Hegyi Ádám István ELTE, április 25.
 Hegyi Ádám István ELTE, 2012. április 25. GPS = Global Positioning System Department of Defense = Amerikai Egyesült Államok Védelmi Minisztériuma 1973 DNSS = Defense Navigation Satellite System vagy Navstar-GPS
Hegyi Ádám István ELTE, 2012. április 25. GPS = Global Positioning System Department of Defense = Amerikai Egyesült Államok Védelmi Minisztériuma 1973 DNSS = Defense Navigation Satellite System vagy Navstar-GPS
A mérnök-informatikus szeret folyamatokban gondolkodni
 A mérnök-informatikus szeret folyamatokban gondolkodni Fokker F.XII (1930) Fokker F.XII (1930) li 2 (1939) Fokker F.XII (1930) li 2 (1939) il 14 (1950) Fokker F.XII (1930) li 2 (1939) il 14 (1950) Concorde
A mérnök-informatikus szeret folyamatokban gondolkodni Fokker F.XII (1930) Fokker F.XII (1930) li 2 (1939) Fokker F.XII (1930) li 2 (1939) il 14 (1950) Fokker F.XII (1930) li 2 (1939) il 14 (1950) Concorde
Robotika és űrkutatás a középiskolában
 Robotika és űrkutatás a középiskolában Jó gyakorlatok az erdélyi református líceumok tehetséggondozásában Református Kollégium Debrecen, 2017. március 25. Pető Mária Székely Mikó Kollégium Sepsiszentgyörgy
Robotika és űrkutatás a középiskolában Jó gyakorlatok az erdélyi református líceumok tehetséggondozásában Református Kollégium Debrecen, 2017. március 25. Pető Mária Székely Mikó Kollégium Sepsiszentgyörgy
Kamerakalibráció és pozícióbecslés érzékenységi analízissel, sík mintázatokból. Dabóczi Tamás (BME MIT), Fazekas Zoltán (MTA SZTAKI)
, Fazekas Zoltán (MTA SZTAKI)") , 2008 feb. 4-5 Kamerakalibráció és pozícióbecslés érzékenységi Bódis-Szomorú András Dabóczi Tamás (BME MIT), Fazekas Zoltán (MTA SZTAKI) Méréstechnika- és Információs Rendszerek Tanszék BME Rendszer-
, 2008 feb. 4-5 Kamerakalibráció és pozícióbecslés érzékenységi Bódis-Szomorú András Dabóczi Tamás (BME MIT), Fazekas Zoltán (MTA SZTAKI) Méréstechnika- és Információs Rendszerek Tanszék BME Rendszer-
ECU teljesítm. Huszár r Viktor V. évf. villamosmérn. rnök k hallgató. Konzulensek: MIT Miklós ThyssenKrupp Presta.
 ECU teljesítm tmény- környezetének nek vizsgálata Huszár r Viktor V. évf. villamosmérn rnök k hallgató Konzulensek: dr. Márkus M János J BME-MIT MIT Siklódi Miklós ThyssenKrupp Presta BME MIT 26 ősz Bevezetés
ECU teljesítm tmény- környezetének nek vizsgálata Huszár r Viktor V. évf. villamosmérn rnök k hallgató Konzulensek: dr. Márkus M János J BME-MIT MIT Siklódi Miklós ThyssenKrupp Presta BME MIT 26 ősz Bevezetés
Intégro CLIA. A klímavezérlő számítógép általános ismertetése
 BRINKMAN HUNGARY KFT. Hódmezővásárhely 6800 Szántó K. J. u. 180. Tel.: (62) 533-260 Fax.: (62) 243-254 Intégro CLIA A klímavezérlő számítógép általános ismertetése Az Integro Clia növényházakban alkalmazható
BRINKMAN HUNGARY KFT. Hódmezővásárhely 6800 Szántó K. J. u. 180. Tel.: (62) 533-260 Fax.: (62) 243-254 Intégro CLIA A klímavezérlő számítógép általános ismertetése Az Integro Clia növényházakban alkalmazható
11. Intelligens rendszerek
 SZÉCHENYI ISTVÁN EGYETEM MŰSZAKI TUDOMÁNYI KAR KÖZLEKEDÉSÉPÍTÉSI TANSZÉK KÖZÚTI FORGALOMTECHNIKA 1. Tantárgykód: NGB_ET009_1 11. Intelligens rendszerek Dr. Kálmán László egyetemi adjunktus Győr, 2014.
SZÉCHENYI ISTVÁN EGYETEM MŰSZAKI TUDOMÁNYI KAR KÖZLEKEDÉSÉPÍTÉSI TANSZÉK KÖZÚTI FORGALOMTECHNIKA 1. Tantárgykód: NGB_ET009_1 11. Intelligens rendszerek Dr. Kálmán László egyetemi adjunktus Győr, 2014.
SZENZOROKRA ÉPÜLŐ ADAPTÍV RENDSZERMODELL
 infokommunikációs technológiák SZENZOROKRA ÉPÜLŐ ADAPTÍV RENDSZERMODELL Dr. Jaskó Szilárd Pannon Egyetem, MIK, Nagykanizsai kampusz Kanizsa Felsőoktatásáért Alapítvány 2015 VIRTUÁLIS STRUKTÚRA 2 VIRTUÁLIS
infokommunikációs technológiák SZENZOROKRA ÉPÜLŐ ADAPTÍV RENDSZERMODELL Dr. Jaskó Szilárd Pannon Egyetem, MIK, Nagykanizsai kampusz Kanizsa Felsőoktatásáért Alapítvány 2015 VIRTUÁLIS STRUKTÚRA 2 VIRTUÁLIS
Beszámoló szakképzési hozzájárulási támogatás felhasználásáról
 Beszámoló szakképzési hozzájárulási támogatás felhasználásáról Támogató: HungaroControl Magyar Légiforgalmi Szolgálat Zártkörűen Működő Részvénytársaság, 1185 Budapest, Igló u. 33-35. Támogatás összege:
Beszámoló szakképzési hozzájárulási támogatás felhasználásáról Támogató: HungaroControl Magyar Légiforgalmi Szolgálat Zártkörűen Működő Részvénytársaság, 1185 Budapest, Igló u. 33-35. Támogatás összege:
DRÓNOK HASZNÁLATA A MEZŐGAZDASÁGBAN
 DRÓNOK HASZNÁLATA A MEZŐGAZDASÁGBAN KÖRÖSPARTI JÁNOS NAIK Öntözési és Vízgazdálkodási Önálló Kutatási Osztály (ÖVKI) Szaktanári továbbképzés Szarvas, 2017. december 7. A drónok használata egyre elterjedtebb
DRÓNOK HASZNÁLATA A MEZŐGAZDASÁGBAN KÖRÖSPARTI JÁNOS NAIK Öntözési és Vízgazdálkodási Önálló Kutatási Osztály (ÖVKI) Szaktanári továbbképzés Szarvas, 2017. december 7. A drónok használata egyre elterjedtebb
Az ÚJ Leica DISTO X-range
 Az ÚJ Leica DISTO X-range 2 Leica DISTO X3 és X4 Robusztus kialakítás a nehéz körülményekre Víz és por ellen védett ház IP 65 szabvány 2m ütésálló Tömör gumi ház Mit jelent ez a felhasználónak? Strapabíró
Az ÚJ Leica DISTO X-range 2 Leica DISTO X3 és X4 Robusztus kialakítás a nehéz körülményekre Víz és por ellen védett ház IP 65 szabvány 2m ütésálló Tömör gumi ház Mit jelent ez a felhasználónak? Strapabíró
Magasságos GPS. avagy továbbra is
 Magasságos GPS avagy továbbra is Tisztázatlan kérdések az RTK-technológiával végzett magasságmeghatározás területén? http://www.sgo.fomi.hu/files/magassagi_problemak.pdf Takács Bence BME Általános- és
Magasságos GPS avagy továbbra is Tisztázatlan kérdések az RTK-technológiával végzett magasságmeghatározás területén? http://www.sgo.fomi.hu/files/magassagi_problemak.pdf Takács Bence BME Általános- és
PILÓTA NÉLKÜLI REPÜLŐGÉPEKKEL SZEMBEN TÁMASZTOTT KÖVETELMÉNYEK VIZSGÁLATA A BRAVO-CSOPORT I. BEVEZETÉS, PROBLÉMAFELVETÉS, AKTUALITÁS
 Dr. habil. Szabolcsi Róbert 1 Mészáros György 2 PILÓTA NÉLKÜLI REPÜLŐGÉPEKKEL SZEMBEN TÁMASZTOTT KÖVETELMÉNYEK VIZSGÁLATA A BRAVO-CSOPORT A pilóta nélküli repülőgépekkel szemben az alkalmazók által támasztott
Dr. habil. Szabolcsi Róbert 1 Mészáros György 2 PILÓTA NÉLKÜLI REPÜLŐGÉPEKKEL SZEMBEN TÁMASZTOTT KÖVETELMÉNYEK VIZSGÁLATA A BRAVO-CSOPORT A pilóta nélküli repülőgépekkel szemben az alkalmazók által támasztott
Roger UT-2. Kommunikációs interfész V3.0
 ROGER UT-2 1 Roger UT-2 Kommunikációs interfész V3.0 TELEPÍTŐI KÉZIKÖNYV ROGER UT-2 2 ÁLTALÁNOS LEÍRÁS Az UT-2 elektromos átalakítóként funkcionál az RS232 és az RS485 kommunikációs interfész-ek között.
ROGER UT-2 1 Roger UT-2 Kommunikációs interfész V3.0 TELEPÍTŐI KÉZIKÖNYV ROGER UT-2 2 ÁLTALÁNOS LEÍRÁS Az UT-2 elektromos átalakítóként funkcionál az RS232 és az RS485 kommunikációs interfész-ek között.
A katonai légijármű rendszermodellje A katonai légijármű lehet: A katonai légijármű bemenetei: a környezetből A katonai légijármű kimenetei:
 Seres György: A KATONAI LÉGIJÁRMŰ, MINT RENDSZER 2003-ban, a ROBOTHADVISELÉS 3 konferencián bemutattam a katonai rendszerek egy általános modelljét 1. Csak emlékeztetőül mutatom be az akkori előadás néhány
Seres György: A KATONAI LÉGIJÁRMŰ, MINT RENDSZER 2003-ban, a ROBOTHADVISELÉS 3 konferencián bemutattam a katonai rendszerek egy általános modelljét 1. Csak emlékeztetőül mutatom be az akkori előadás néhány
Közúti közlekedési automatika. BME, Közlekedés- és Járműirányítási Tanszék
 Közúti közlekedési automatika BME, Közlekedés- és Járműirányítási Tanszék A közúti forgalomirányítás célja A közlekedési folyamatok befolyásolása meghatározott célok elérése érdekében. A forgalomirányító
Közúti közlekedési automatika BME, Közlekedés- és Járműirányítási Tanszék A közúti forgalomirányítás célja A közlekedési folyamatok befolyásolása meghatározott célok elérése érdekében. A forgalomirányító
The modular mitmót system. 433, 868MHz-es ISM sávú rádiós kártya
 The modular mitmót system 433, 868MHz-es ISM sávú rádiós kártya Kártyakód: COM-R04-S-01b Felhasználói dokumentáció Dokumentációkód: -D01a Budapesti Műszaki és Gazdaságtudományi Egyetem Méréstechnika és
The modular mitmót system 433, 868MHz-es ISM sávú rádiós kártya Kártyakód: COM-R04-S-01b Felhasználói dokumentáció Dokumentációkód: -D01a Budapesti Műszaki és Gazdaságtudományi Egyetem Méréstechnika és
Székesfehérvár
 1 2009.03.19. - Székesfehérvár System1200-2004 SmartStation - 2005 SmartRover - 2006 SmartPole/TPS1200+ 2007 SmartRTK + MAC 2008 GPS1200+ GNSS 2009-200? 2 ? Elérhető GNSS jelek haszn. Modern hálózati megold.
1 2009.03.19. - Székesfehérvár System1200-2004 SmartStation - 2005 SmartRover - 2006 SmartPole/TPS1200+ 2007 SmartRTK + MAC 2008 GPS1200+ GNSS 2009-200? 2 ? Elérhető GNSS jelek haszn. Modern hálózati megold.
Micro Twister Pro 2.4Ghz 3 csatornás, 2.4 Ghz-es, beltéri helikopter modell.
 Micro Twister Pro 2.4Ghz 3 csatornás, 2.4 Ghz-es, beltéri helikopter modell. Jellemzők: - Erős fém váz és farok cső. - Két repülési mód, kezdő és haladó. - Szuper stabil ellentétesen forgó rotor elrendezés.
Micro Twister Pro 2.4Ghz 3 csatornás, 2.4 Ghz-es, beltéri helikopter modell. Jellemzők: - Erős fém váz és farok cső. - Két repülési mód, kezdő és haladó. - Szuper stabil ellentétesen forgó rotor elrendezés.
SAP EAM MRS és LAM megoldásainak gyakorlati bevezetési tapasztalatai
 SAP EAM MRS és LAM megoldásainak gyakorlati bevezetési tapasztalatai Nikolaidisz Kosztasz, ERP Consulting Zrt. 2018. Szeptember 10. Témák TIGÁZ DSO MRS bevezetés Magyar Közút LAM bevezetés 2 TIGÁZ - Visszatekintés
SAP EAM MRS és LAM megoldásainak gyakorlati bevezetési tapasztalatai Nikolaidisz Kosztasz, ERP Consulting Zrt. 2018. Szeptember 10. Témák TIGÁZ DSO MRS bevezetés Magyar Közút LAM bevezetés 2 TIGÁZ - Visszatekintés
Quadkopter szimulációja LabVIEW környezetben Simulation of a Quadcopter with LabVIEW
 Quadkopter szimulációja LabVIEW környezetben Simulation of a Quadcopter with LabVIEW T. KISS 1 P. T. SZEMES 2 1University of Debrecen, kiss.tamas93@gmail.com 2University of Debrecen, szemespeter@eng.unideb.hu
Quadkopter szimulációja LabVIEW környezetben Simulation of a Quadcopter with LabVIEW T. KISS 1 P. T. SZEMES 2 1University of Debrecen, kiss.tamas93@gmail.com 2University of Debrecen, szemespeter@eng.unideb.hu
A KATONAI LÉGIJÁRMŰ, MINT RENDSZER. Seres György 2005
 A KATONAI LÉGIJÁRMŰ, MINT RENDSZER Seres György 2005 A KATONAI LÉGIJÁRMŰ, MINT RENDSZER Seres György 2005 2003-ban ban,, a ROBOTHADVISELÉS 3 konferencián bemutattam a katonai rendszerek egy általános modelljét
A KATONAI LÉGIJÁRMŰ, MINT RENDSZER Seres György 2005 A KATONAI LÉGIJÁRMŰ, MINT RENDSZER Seres György 2005 2003-ban ban,, a ROBOTHADVISELÉS 3 konferencián bemutattam a katonai rendszerek egy általános modelljét
Repülőmodellezés kezdőknek
 Repülőmodellezés kezdőknek Hogyan kezdjem el a repülőmodellezést? Ezt a kérdést már biztosan sokan feltették maguknak, vagy másoknak. Az oldalon a kezdő modellezőknek szeretnénk azzal segíteni, hogy valamelyest
Repülőmodellezés kezdőknek Hogyan kezdjem el a repülőmodellezést? Ezt a kérdést már biztosan sokan feltették maguknak, vagy másoknak. Az oldalon a kezdő modellezőknek szeretnénk azzal segíteni, hogy valamelyest
Okos Városok T-City Szolnok. HTE INFOKOM 2014 Smart Metering & Environment
 Okos Városok T-City Szolnok HTE INFOKOM 2014 Smart Metering & Environment OKOS VÁROS Az angol nyelvű Smart City elnevezést fordíthatnánk korszerű városra, emberközpontú városra, vagy egyszerűen: élhetőbb
Okos Városok T-City Szolnok HTE INFOKOM 2014 Smart Metering & Environment OKOS VÁROS Az angol nyelvű Smart City elnevezést fordíthatnánk korszerű városra, emberközpontú városra, vagy egyszerűen: élhetőbb
A honvédelmi miniszter. /2007. (...) HM. rendelete. a Magyar Honvédség légvédelmi célú repüléseinek szabályairól
 HM. rendelete. a Magyar Honvédség légvédelmi célú repüléseinek szabályairól") A honvédelmi miniszter. /2007. (...) HM rendelete a Magyar Honvédség légvédelmi célú repüléseinek szabályairól A légi közlekedésről szóló 1995. évi XCVII. törvény (a továbbiakban: Lt.) 74. -ának w) pontjában
A honvédelmi miniszter. /2007. (...) HM rendelete a Magyar Honvédség légvédelmi célú repüléseinek szabályairól A légi közlekedésről szóló 1995. évi XCVII. törvény (a továbbiakban: Lt.) 74. -ának w) pontjában
Robotika. Relatív helymeghatározás Odometria
 Robotika Relatív helymeghatározás Odometria Differenciális hajtás c m =πd n /nc e c m D n C e n = hány mm-t tesz meg a robot egy jeladó impulzusra = névleges kerék átmérő = jeladó fölbontása (impulzus/ford.)
Robotika Relatív helymeghatározás Odometria Differenciális hajtás c m =πd n /nc e c m D n C e n = hány mm-t tesz meg a robot egy jeladó impulzusra = névleges kerék átmérő = jeladó fölbontása (impulzus/ford.)
A LEAN FOLYAMATFEJLESZTŐ SZAKMÉRNÖK ÉS SPECIALISTA KÉPZÉS ILLESZKEDÉSE A BME KJK KÉPZÉSI RENDSZERÉBE
 A LEAN FOLYAMATFEJLESZTŐ SZAKMÉRNÖK ÉS SPECIALISTA KÉPZÉS ILLESZKEDÉSE A BME KJK KÉPZÉSI RENDSZERÉBE Dr. Bóna Krisztián egyetemi docens szakfelelős 10+3 GTK 10 ÉMK GPK 10+2 MŰEGYETEM 9+1 TTK Műegyetem
A LEAN FOLYAMATFEJLESZTŐ SZAKMÉRNÖK ÉS SPECIALISTA KÉPZÉS ILLESZKEDÉSE A BME KJK KÉPZÉSI RENDSZERÉBE Dr. Bóna Krisztián egyetemi docens szakfelelős 10+3 GTK 10 ÉMK GPK 10+2 MŰEGYETEM 9+1 TTK Műegyetem
A KATONAI LÉGIJÁRMŰ RENDSZERMODELLJE A KATONAI LÉGIJÁRMŰ
 Seres György A KATONAI LÉGIJÁRMŰ RENDSZERMODELLJE A rendszerelmélet, mint új tudományos vizsgálati módszer, Angliában keletkezett, a második világháború idején, amikor a német légierő, a Luftwaffe támadásai
Seres György A KATONAI LÉGIJÁRMŰ RENDSZERMODELLJE A rendszerelmélet, mint új tudományos vizsgálati módszer, Angliában keletkezett, a második világháború idején, amikor a német légierő, a Luftwaffe támadásai
TestLine - nummulites_gnss Minta feladatsor
 1.* Egy műholdas helymeghatározás lehet egyszerre abszolút és kinematikus. 2.* műholdak pillanatnyi helyzetéből és a megmért távolságokból számítható a vevő pozíciója. 3.* 0:55 Nehéz kinai BEIDOU, az amerikai
1.* Egy műholdas helymeghatározás lehet egyszerre abszolút és kinematikus. 2.* műholdak pillanatnyi helyzetéből és a megmért távolságokból számítható a vevő pozíciója. 3.* 0:55 Nehéz kinai BEIDOU, az amerikai
H01 TEHERAUTÓ ÉS BUSZMODELL SZÉLCSATORNA VIZSGÁLATA
 H01 TEHERAUTÓ ÉS BUSZMODELL SZÉLCSATORNA VIZSGÁLATA 1. A mérés célja A mérési feladat moduláris felépítésű járműmodellen a c D ellenállástényező meghatározása különböző kialakítások esetén, szélcsatornában.
H01 TEHERAUTÓ ÉS BUSZMODELL SZÉLCSATORNA VIZSGÁLATA 1. A mérés célja A mérési feladat moduláris felépítésű járműmodellen a c D ellenállástényező meghatározása különböző kialakítások esetén, szélcsatornában.
SHARKY 775 ULTRAHANGOS KOMPAKT HŐMENNYISÉGMÉRŐ
 ALKALMAZÁSI TERÜLET A kompakt ultrahangos hőmennyiségmérő hosszú távon, extrém körülmények között is biztosítja a maximális pontosságot a hőenergia és vízfogyasztás mérésben, az egészen kicsitől a nagy
ALKALMAZÁSI TERÜLET A kompakt ultrahangos hőmennyiségmérő hosszú távon, extrém körülmények között is biztosítja a maximális pontosságot a hőenergia és vízfogyasztás mérésben, az egészen kicsitől a nagy
Technikai áttekintés SimDay 2013. H. Tóth Zsolt FEA üzletág igazgató
 Technikai áttekintés SimDay 2013 H. Tóth Zsolt FEA üzletág igazgató Next Limit Technologies Alapítva 1998, Madrid Számítógépes grafika Tudományos- és mérnöki szimulációk Mottó: Innováció 2 Kihívás Technikai
Technikai áttekintés SimDay 2013 H. Tóth Zsolt FEA üzletág igazgató Next Limit Technologies Alapítva 1998, Madrid Számítógépes grafika Tudományos- és mérnöki szimulációk Mottó: Innováció 2 Kihívás Technikai
Fókuszban a MEGOLDÁSOK KTS 560 / KTS 590. Vezérlőegység diagnosztika az ESI[tronic] használatával
![Fókuszban a MEGOLDÁSOK KTS 560 / KTS 590. Vezérlőegység diagnosztika az ESI[tronic] használatával](/thumbs/91/107540085.jpg "Fókuszban a MEGOLDÁSOK KTS 560 / KTS 590. Vezérlőegység diagnosztika az ESI[tronic] használatával") Fókuszban a MEGOLDÁSOK KTS 560 / KTS 590 Vezérlőegység diagnosztika az ESI[tronic] használatával Élvonalbeli Vezérlőegység diagnosztika az optimális hatékonyságért Az új és erős KTS 560 és KTS 590 modulok
Fókuszban a MEGOLDÁSOK KTS 560 / KTS 590 Vezérlőegység diagnosztika az ESI[tronic] használatával Élvonalbeli Vezérlőegység diagnosztika az optimális hatékonyságért Az új és erős KTS 560 és KTS 590 modulok
VÉDELMI ELEKTRONIKA, INFORMATIKA ÉS KOMMUNIKÁCIÓ TUDOMÁNYSZAK
 VÉDELMI ELEKTRONIKA, INFORMATIKA ÉS KOMMUNIKÁCIÓ TUDOMÁNYSZAK http://www.zmne.hu/kmdi/index.html TUDOMÁNYSZAKVEZETŐ Dr. Haig Zsolt mk. alezredes, egyetemi docens 29-343 haig.zsolt@zmne.hu http://www.zmne.hu/tanszekek/ehc/indul.htm
VÉDELMI ELEKTRONIKA, INFORMATIKA ÉS KOMMUNIKÁCIÓ TUDOMÁNYSZAK http://www.zmne.hu/kmdi/index.html TUDOMÁNYSZAKVEZETŐ Dr. Haig Zsolt mk. alezredes, egyetemi docens 29-343 haig.zsolt@zmne.hu http://www.zmne.hu/tanszekek/ehc/indul.htm
RHTemp 2000. TepRetriver-RH. Hőmérséklet- és páratartalom adatgyűjtő, LCD kijelzővel. Hőmérséklet- és páratartalom adatgyűjtő
 TepRetriver-RH Hőmérséklet- és páratartalom adatgyűjtő - méréstartomány: -40 o C - +80 o C - pontosság: ±0,5 o C ( 0 o C - 50 o C) Páratartalom: - méréstartomány: 0%RH 95%RH - felbontás: 0,1 %RH - pontosság:
TepRetriver-RH Hőmérséklet- és páratartalom adatgyűjtő - méréstartomány: -40 o C - +80 o C - pontosság: ±0,5 o C ( 0 o C - 50 o C) Páratartalom: - méréstartomány: 0%RH 95%RH - felbontás: 0,1 %RH - pontosság:
A LÉGIKÖZLEKEDÉSI ZAJ TERJEDÉSÉNEK VIZSGÁLATA BUDAPEST FERIHEGY NEMZETKÖZI REPÜLŐTÉR
 A LÉGIKÖZLEKEDÉSI ZAJ TERJEDÉSÉNEK VIZSGÁLATA BUDAPEST FERIHEGY NEMZETKÖZI REPÜLŐTÉR KÖRNYEZETÉBEN Témavezetők: Konzulensek: Szarvas Gábor, Budapest Airport Zrt. Dr. Weidinger Tamás, ELTE TTK Meteorológiai
A LÉGIKÖZLEKEDÉSI ZAJ TERJEDÉSÉNEK VIZSGÁLATA BUDAPEST FERIHEGY NEMZETKÖZI REPÜLŐTÉR KÖRNYEZETÉBEN Témavezetők: Konzulensek: Szarvas Gábor, Budapest Airport Zrt. Dr. Weidinger Tamás, ELTE TTK Meteorológiai
Leírás. Készítette: EMKE Kft. 2009. február 11.
 Leírás Alkalmas: Jármővek mozgásának valós idejő nyomkövetését biztosító kommunikációra. A mozgás koordinátáinak eltárolására, utólagos visszaellenırzésére (pl. sebesség túllépés, vagy bejárt útvonal).
Leírás Alkalmas: Jármővek mozgásának valós idejő nyomkövetését biztosító kommunikációra. A mozgás koordinátáinak eltárolására, utólagos visszaellenırzésére (pl. sebesség túllépés, vagy bejárt útvonal).
A MINI SZATELLITTŐL A SUMO-ROBOTIG
 A MINI SZATELLITTŐL A SUMO-ROBOTIG Az atomoktól a csillagokig 2018. nov. 29. Pető Mária Székely Mikó Kollégium, Sepsiszentgyörgy MTA-ELTE Fizika Tanítása Kutatócsoport Témáink: Arduino - röviden CanSat-
A MINI SZATELLITTŐL A SUMO-ROBOTIG Az atomoktól a csillagokig 2018. nov. 29. Pető Mária Székely Mikó Kollégium, Sepsiszentgyörgy MTA-ELTE Fizika Tanítása Kutatócsoport Témáink: Arduino - röviden CanSat-
A honvédelmi miniszter /2008. ( ) HM. rendelete
 HM. rendelete") A honvédelmi miniszter /2008. ( ) HM rendelete az állami repülések céljára szolgáló repülőtér és a katonai repülés céljára földön telepített léginavigációs berendezés üzemben tartásának feltételeiről szóló
A honvédelmi miniszter /2008. ( ) HM rendelete az állami repülések céljára szolgáló repülőtér és a katonai repülés céljára földön telepített léginavigációs berendezés üzemben tartásának feltételeiről szóló