Tartalom. 2. rész GPS Jamming Szándékos GPS zavarás A zavarás elleni védelem eszközei és módszerei. 3. rész Utószó helyett. 4. rész Források jegyzéke
|
|
|
- Piroska Borbélyné
- 10 évvel ezelőtt
- Látták:
Átírás
1 Tartalom Bevezető 1. rész Műholdas helymeghatározó rendszerek: NAVSTAR, ГЛОНАСС, GALILEO Civil és katonai GPS felhasználók A sebezhető GPS Nem szándékos zavarásból eredő interferenciák 2. rész GPS Jamming Szándékos GPS zavarás A zavarás elleni védelem eszközei és módszerei 3. rész Utószó helyett 4. rész Források jegyzéke

2 Bevezető A GPS alkalmazások napról napra fokozódó mértékben szövik át a modern technológiai infrastruktúrákat. Ez a bemutató abból a célból készült, hogy felhívja a figyelmet a GPS rendszer sérülékenységére, a GPS eszközök működésének szándékos zavarásából eredő veszélyekre és GPS alkalmazásokból fakadó kockázati tényezők csökkentésének műszaki lehetőségeire. Tapasztalhatjuk, hogy az információs társadalmak túlbonyolított struktúrái viszonylag szerény ráfordításokkal, meglepően egyszerű eszközökkel és módszerekkel sikeresen támadhatóak. -SZASZAKMAI SZEMLE A KBH TUDOMÁNYOS TANÁCSÁNAK KIADVÁNYA A fotón látható TETRA EDR kommunikátorok GPS modult is tartalmaznak.

3 Műholdas helymeghatározó rendszerek A műholdas helymeghatározás önállóan kialakított rendszereit összefoglaló néven GNSS rendszereknek nevezzük (GNSS: Global Navigational Satellite System globális navigációs műholdrendszer). Jelenleg két GNSS-rendszer üzemel: az amerikai NAVSTAR GPS (Global Positioning System) és a részben kiépített orosz GLONASS. A GNSS európai szegmense a kiépítés alatt álló Galileo rendszer. A globális műholdas helymeghatározó rendszerek a mesterséges holdak és kiszolgáló létesítményeik, továbbá a vevőberendezések olyan komplex együttese, amely a Föld egész felületén és a légtérben lehetővé teszi a földrajzi hely koordinátáinak meghatározását egy, a Földhöz kötött vonatkoztatási rendszerben. A földrajzi helymeghatározás pontosságát, gyorsaságát, megbízhatóságát és időjárástól való függetlenségét többek között a műholdas technikák, a rádiótechnika, az atomórák megjelenése és a számítástechnika rohamos fejlődése tette lehetővé.


4 GNSS (Global Navigational Satellite System) Műholdakon alapuló, az egész földkerekségre kiterjedő, a helymeghatározást és a navigációt szolgáló rendszer. A helymeghatározásban a hol vagyunk kérdésre keresünk egzakt választ, a navigáció során pedig a hogyan jutunk el a célpontig kérdést tesszük fel.

5 Navigare necesse est, vivere non est necesse!" Gnaeus Pompeius Magnus A GPS alkalmazási területei Szárazföldi alkalmazás Közlekedés Helymeghatározás Segélyszolgálati járművek Kereső mentőszolgálat Hatósági járművek Kamionok, autóbuszok Magánjárművek Követés Járművek mozgásának figyelés Geodézia Vízi alkalmazás Közlekedés Helymeghatározás Tengeri navigáció Folyami navigáció Keresés és mentés Óceonagráfia Vízügyi felmérések Tengermélység mérése Geodézia Vízügyi felmérések Tengermélység mérése Légi alkalmazás. Menet navigáció Landolási pálya durva megközelítése A GPS alkalmazások (a modern társadalmak technológiai infrastruktúráin keresztül) közvetlenül vagy közvetve, de napról napra egyre fokozódó mértékben befolyásolják szinte minden földlakó életét.

6 NAVSTAR (USA, DOD ) GPS
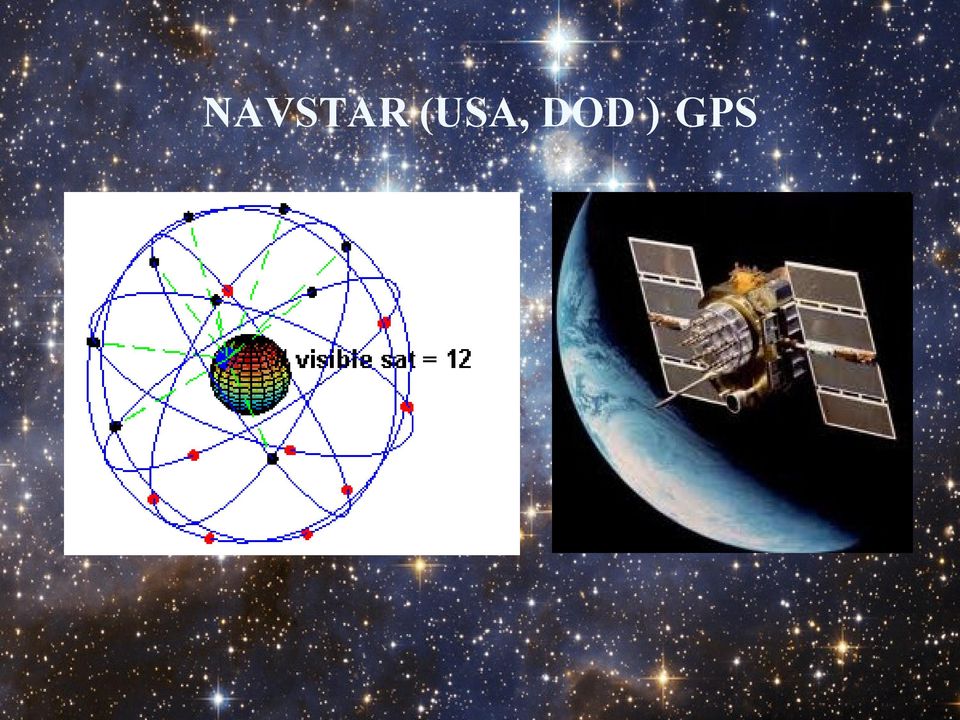
7 A Navstar GPS (Global Positioning System) Globális Helymeghatározó Rendszer, az Amerikai Egyesült Államok DoD (Departement of Defence) Védelmi Minisztériuma által (elsődlegesen katonai célokra) kifejlesztett és üzemeltetett - a Föld bármely pontján, a nap 24 órájában működő - műholdas helymeghatározó rendszer. A rendszer előnye, hogy független: időjárástól napszaktól légköri viszonyoktól földfelszín feletti magasságtól mozgási sebességtől (pl. vadászgépek, bombák, rakéták)

8 Az amerikai NAVSTAR rendszer 24 darab 12 órás keringési ciklus idejű műholdból áll. A műholdak hat pályasíkon, egymástól 60 fokkal elforgatva keringenek. A Föld egyenlítőjéhez viszonyított pályaelhajlás 55 fok. A műholdak keringési magassága km. A földi felügyelő állomás öt helyen működik, négy feltöltő és egy központi vezérlő segíti az üzemeltetést. Az amerikai NAVSTAR GPS rendszert napjainkban több millió ember használja mind civil, mind katonai területen. A NAVSTAR rendszer üzemeltetése katonai kézben van. A felhasználók több ponton kiszolgáltatottak, hiszen ha a tájékozódásukat erre a rendszerre építik, akkor a rendszer "kikapcsolása", "lekódolása" vagy szándékos jel "torzítás" a tájékozódást lehetetlenné teszi. Ez a tény nagy mértékű kiszolgáltatottságot jelent, ezért a tengeri hajózás és a repülés területén a GPS használata csak egyéb kiegészítő navigációs rendszerekkel együtt lehetséges. A NAVSTAR rendszer alap jellemzői: 24/29 műhold (Rockwell International) km magasságban keringenek 6 pályasík (3-4-5 műhold/pályasík) 55 pályainkl. az egyenlítő síkjához viszonyítva A pályasíkok 30 -onként az egyenlítő mentén 4 követő és 2 követő/vezérlő állomás: (Hawaii, Ascencion, Diego Garcia, Kwayalein, Colorado Springs) 11 óra 58 perc keringési idő ~650kg, ~6 m nyitott napelemekkel

9 GPS háborúban és békében május 1-jéről 2-ára virradó éjjel Bill Clinton személyesen rendelte el azt a gombnyomást, amely megszüntette a globális helymeghatározó rendszer (Global Positioning System, GPS) műholdjeleit addig zavaró jeleket. Az úgynevezett Selective Availabilityt (korlátozott hozzáférést) azért alakította ki az USA kormánya, hogy megnehezítse az ellenséges fegyverrendszerek működését. Clinton döntése, miszerint feloldja a GPS-zavaró jelet, lehetővé tette a mobil műholdas navigáció tömeges elterjedését. Napjainkban a piacon kapható GPS készülékek döntő többsége az amerikai Navstar rendszert használja. A rendszer szolgáltatásai a civil felhasználók számára ingyenesen hozzáférhetőek, de nem szabad elfelejteni, hogy a Navstar valójában egy katonai rendszer. Az USA elnöke bármelyik pillanatban korlátozhatja vagy megszüntetheti a jelek sugárzását a civil tartományban. THE WHITE HOUSE Office of the Press Secretary For Immediate Release May 1, 2000 STATEMENT BY THE PRESIDENT REGARDING THE UNITED STATES' DECISION TO STOP DEGRADING GLOBAL POSITIONING SYSTEM ACCURACY Today, I am pleased to announce that the United States will stop the intentional degradation of the Global Positioning System (GPS) signals available to the public beginning at midnight tonight. -- This increase in accuracy will allow new GPS applications to emerge and continue to enhance the lives of people around the world. President Bill Clinton

10 A GPS egy magasszintű helymeghatározó rendszer, amellyel 3 dimenziós helyzetmeghatározást, időmérést és sebességmérést végezhetünk földön, vízen vagy levegőben. Pontossága jellemzően méteres nagyságrendű, de differenciális mérési módszerekkel akár mm pontosságot is el lehet érni, valós időben is. A rendszer előnye, hogy a helymeghatározás nagy magasságban keringő műholdak (24 db.) segítségével történik, így a rendszer folyamatos mérési lehetőséget biztosít bármilyen közegben, napi 24 órában. A rendszer fejlesztése és felállítása igen nagy összegeket emésztett fel (indításkor kb. 12 milliárd USD), magas műszaki fejlettséget követel, így nem csoda, ha az USA védelmi minisztériuma a mecénás. Mivel annak idején (1970), amikor a rendszert elkezdték fejleszteni, ez már része volt az ún. "csillagháborús tervnek", szigorúan titkos volt. Idővel csökkentek a pénzügyi források, megindult a politikai "felmelegedés", a rendszer kezdett egyre nyíltabbá válni, annyira, hogy már néhány éve akárki (akinek van rá pénze, hisz nem olcsó műszer) megveheti. A műszer megvétele után annak beüzemelése percek kérdése. Ma főbb felhasználói a katonaság mellett: - az űrkutatás - a navigáció - a geodézia - a közlekedés - a földtudományok - az erőforrás kutatások - az expedíciós kutatók.
, magas műszaki fejlettséget követel, így nem csoda, ha az USA védelmi minisztériuma a mecénás.")
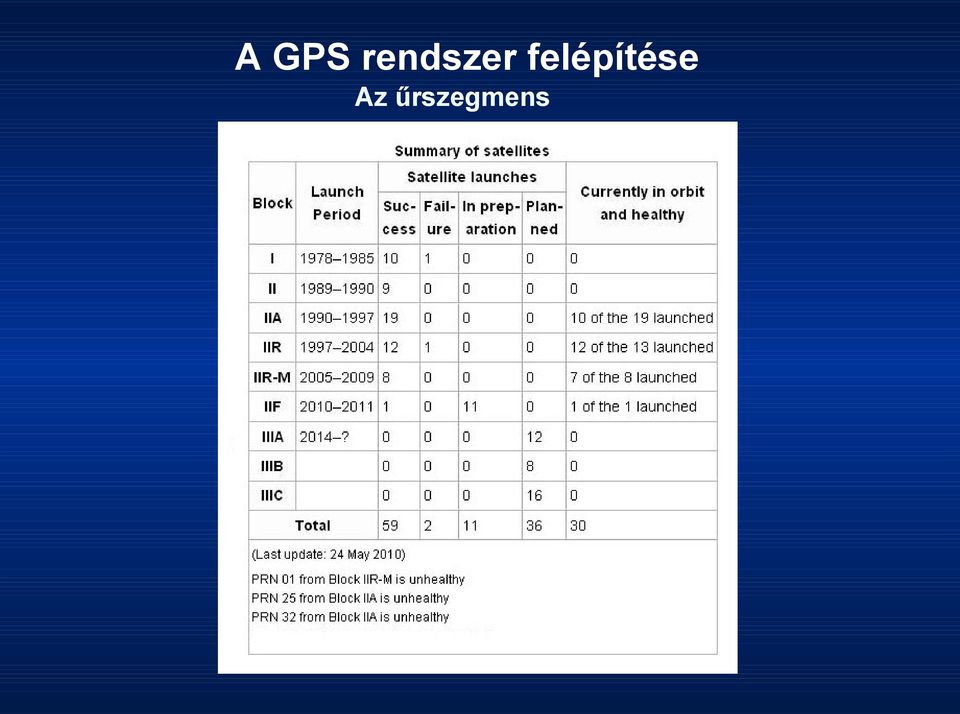
11 A GPS rendszer felépítése az űrszegmens - space segment (műholdak) a vezérlőrendszer - control segment (földi vezérlő- és monitorállomások) a felhasználói rendszer - user segment (vevőkészülékek és szolgáltatások)

12 A GPS rendszer felépítése Az űrszegmens Az űrszegmensbe tartozik az előzőekben említett 24 darab navigációs műhold. Ezek a műholdak hat csoportra vannak osztva, amelyek külön- külön, egymástól 60 fokos keletnyugati eltérésű pályán keringenek a Föld körül. Egy műhold főbb fedélzeti elemei: adóberendezések atomi órák tápegységek, napelemek navigációs egység fedélzeti számítógép helyzet-stabilizátorok műholdközi kommunikációs berendezések földi kommunikációs berendezések A bemutató készítésének időpontjában összesen 30 darab műhold kering a Föld körül. Minél több műhold szolgáltat egyszerre navigációs adatok annál gyorsabban és pontosabban tudjuk meghatározni földrajzi helyzetünket.

13 A GPS rendszer felépítése Az űrszegmens
14 A GPS műholdak műszaki adatai: A GPS rendszer felépítése Az űrszegmens Név: NAVSTAR Gyártó: Rockwell International Magasság: km Súly: 850 kg (pályára állás után) Méret: kb. 6 méter a nyitott napelemekkel Keringési idő: 11 óra 58 perc Elhelyezkedés: 6 pályasík, egymáshoz képest 60 fokkal elforgatva, 55 fokos pályasík-elhajlás az egyenlítőhöz képest Tervezett élettartam: kb. 7.5 év Keringő példányok: állandóan változnak, ma még kb. 10 db. ún. Block I prototípusú műhold van az űrben, amit folyamatosan felváltanak Block II típusúakra. Konstelláció: 24 műhold

15 A GPS műhold felépítése A műholdak fő alapáramkörei egy-egy nagypontosságú cézium és rubídium atomóra, amelyek az oszcillátor fo = MHz-es alapfrekvenciáját vezérlik. Az alapfrekvencia 154-szeres szorzata az L1, míg 120-szoros szorzata az L2 vivőfrekvencia. További két frekvencia használatos a műhold és a vezérlőállomások közötti kommunikációra. Az L1 és L2 jel modulált jel. A moduláció egyik célja, a vivőhullám megjelölése, hiszen a műhold és a vevő jelének egybevetése az időmérés alapja. A moduláció másik célja a műhold üzeneteinek a továbbítása. A moduláció módja kódmoduláció.

16 A GPS rendszer felépítése A GPS rendszer működését irányító földi vezérlőrendszer állomásai Forrás: Peter H. Dana Global Positioning System Overview Department of Geography, University of Texas at Austin, 1994.

17 A vezérlő szegmens A GPS rendszer működését a földi vezérlőrendszer irányítja. A vezérlőrendszer három alapelemből áll: egy központi vezérlő állomásból, monitorállomásokból, földi antennákból Világszerte összesen öt darab monitorállomás található, melyek közül a központi vezérlő állomás Colorado Springs-ben található. A többi állomás pedig: Hawaii, Ascension szigete, Diego Garcia, Kwajalein. A földi vezérlőegység a következő feladatokat látja el: a műholdak működésének folyamatos figyelése az egyes egységek állapotának ellenőrzése a műholdak pályaadatainak folyamatos mérése a műholdon tárolt adatok frissítése a műhold fedélzeti óráinak szinkronizálása, a pontos idő beállítása a helymeghatározáshoz szükséges korrekciós adatok gyűjtése és továbbítása a műholdon tárolt navigációs üzenettár frissítése A felhasználói szegmens A felhasználói szegmensbe azokat a készüléket értjük amelyek rendelkeznek GPS vevővel. Ezen készülékeken belül található egy antenna mely a szatellitek által továbbított frekvenciára vannak hangolva, egy feldolgozó-processzor és egy nagy pontosságú óra. Leggyakrabban egy kijelzőt is integrálnak az eszközbe mely megjeleníti a felhasználó számára az aktuális pozícióját illetve mozgási sebességét. A mai GPS vevők már képesek más eszközökkel is kommunikálni soros porton, USB-n vagy Bluetooth-on keresztül.

18 A felhasználói szegmens az összes lehetséges vevőkészülék teljes tartományát magába foglalja. A GPS vevők jelfeldolgozásának elve igen bonyolultnak tűnik, mégis nagyon egyszerűen meg lehet érteni. A módszer lényege az ún. egyutas távolságmérés, amelyet már Albert Einstein alkalmazott elméleti kísérleteiben a speciális relativitáselmélet kidolgozása során. Ha két ponton (A és B) egyegy nagypontosságú órát helyezünk el, akkor mérni tudjuk az ''A'' és ''B'' pont közötti távolságot, azáltal, hogy ''A'' adott időpontban impulzusokat bocsát ki. Az impulzusok beérkezési idejét a ''B'' összehasonlítja a saját órájával és meghatározza az ''A'' ponttól való távolságát a d = c t összefüggés segítségével.a két órának igen pontosan szinkronizáltnak kell lennie, ami igen nehéz feladat, ezért a problémát úgy oldják meg, hogy két olyan órát alkalmaznak, amelynek saját járása van. Ha azonban a két időbázis kötött kapcsolattal rendelkezik és ez ismert, akkor a két rendszer szinkronizáltnak tekinthető. Ezt valósítja meg a GPS. Leadtek 9553 Bluetooth GPS A GPS rendszer felépítése A felhasználói szegmens Specifikáció 20 csatornás "All-In-View" jelkövetés, 10 méteres 2D RMS pontosság Cold/Warm/Hot start ideje: 42/38/1 másodperc (30 db-hz-nél nagyobb jelerõsség esetén) 0.1 másodperces műhold újra megtalálás NMEA-0183 szabványos, bps átviteli sebességgel Energia kímélõ üzemmód Cserélhetõ akkumulátor Serial Port Profile (SPP) támogató Bluetooth eszközökkel kompatibilis extra érzékenység miniatűr méret két LED mutatja a Bluetooth és a GPS jelet Li-polymer akkumulátor, 3 óra használati idõ / 10 óra Scan Mode Ki/be kapcsoló gomb Méretek: 61.4mm x 42.3mm x 25.4mm

19 A GPS vevő felépítése GPS datalogger A GPS vevő antenna-egységből és jelfeldolgozó berendezésből áll. Ez utóbbi részei: a rádiófrekvenciás egység, követőhurkok, a számító-egység, az adattároló egység, a vezérlő egység és a tápegység. Gyufásdoboz méretű GPS adatgyűjtő/adattároló eszköz

20 A GPS vevő felépítése A new highly integrated, low-power GPS product based on a 0.13 micron CMOS process of the SiRFstarIII-GSC3f-LParchitecture. It is a single-board solution with increased to 20 parallel channels. The JP18 unit for the first time combines a complete AGPS digital baseband processor, RF front end, 4 Mb ROM and 4 megabits of flash memory in a small size, providing manufacturers of portable and wireless devices with a drop-in AGPS solution they can use to deliver real-time location and navigation capabilities in a simpler, smaller design with extended battery life. This unit will deliver exceptional sensitivity, low power consumption and extremely fast time to first fix (TTFF) in a compact, (11 x 11 mm, 22 pin) package. The digital section of the GPS receiver includes a powerful SiRFstarIII core GPS signal processor that handles all the time critical and low latency acquisition, tracking and reacquisition tasks autonomously, and a 50 MHz ARM7TDMI processor designed to run many OEM user applications. Key Features GPS module based on SiRFstarIII-GSC3LTf chip High sensitivity for indoor fixes Extremely fast TTFF at low signal levels effective correlators Integrated TCXO On chip 4 Mb FLASH + 4 Mb ROM ARM7 baseband CPU GSW3 software support Starter-kit including evaluation and configuration tool Very small size: 11 mm x 11 mm Falcom. : JP18 Smallest SiRF based GPS module Size:11x11x1.7mm

21 Not Made in Hungary Nem Magyarországon készült. Szinte feledésbe merült, 1 hogy a félvezető integrált áramkörök terén volt egy sikeres kitörési kísérlet hazánkban! Ez, az között, OMFB támogatással végrehajtott program, amelyet "LSI Kft."-nek becéztünk, bizonyította, hogy a hazai szakmai közösség (HIKI, KFKI, TKI és BME) képes volt egy korszerű mikroprocesszort kifejleszteni, és ezer darab előállításával demonstrálni ezt a készségét. A szakma ma legelismertebb és a szakmában is maradt kutatói - kiragadott példaként Csurgay Árpádot, Roska Tamást, Bársony Istvánt, Keresztes Pétert említem - ezen az ujjgyakorlaton alapozták meg mindmáig "eladható" tudásukat. Mások kisvállalatokat alapítva tették teljesebbé az innovációs kört (Kraft, Mikrovákuum stb. (A nagyon sikeres Semilab az MFKI választotta prioritás, az úgynevezett vegyület-félvezetők oldaláról érkezett, de mára a fő bevételt már a szilícium-piacán bevált mérőeszközük hozza.) A folytatásként létrehozott Mikroelektronikai Vállalat 1985-ös tűzesetét követően azonban kudarcba fulladt minden, már csak azért is, mert az akkori kormány a Lloyd Biztosítótól (igen: a gyárat gondosan és jó helyen biztosították!) kapott nagy összeget nem a szakmába forgatta vissza. Tetézte mindezt azzal, hogy helyt adott olyan destruktív és - napjainkra is tanulságos - vélekedéseknek, miszerint jó, hogy leégett a hazai gyár és a biztosító fizetett, mert úgysem volt korszerű - ami így nem is volt igaz. Emiatt a politikai rendszer megújulását követően különösen hátrányos helyzet állt elő e tudományág hazai presztízsében. A hazai ellentmondás abban csúcsosodott ki - és ez a leginkább élenjáró tudományágakban ma is igaz maradt -, hogy a leghasználhatóbb eredmények jobbára nemcsak hogy külföldi tartózkodásaink idején születtek, de a hazai alkalmazásukra is csak szórványosan volt, van lehetőség. Gyulai József az MTA rendes tagja
22 Complete Stand-Alone GPS Receiver Solution with MAX2742 The MAX2742 is a CMOS, single-chip, GPS front-end downconverter. This state-of-the-art device consumes very low power (32mW at 2.4V), and eliminates the need for a costly IF SAW filter or bulky discrete IF bandpass filters. The MAX2742 integrates a low-noise amplifier (LNA), mixer, BPF, automatic-gain-control amplifier (AGC), local oscillator synthesizer, clock buffer, and internal digital sampler. This device can interface with many commercially available GPS baseband ICs. It is suitable for many applications, including vehicle navigation, telematics, automatic security, asset tracking, location-based service (LBS), and consumer electronics.
23 MS GPS Receiver Architecture A typical GPS receiver inside an MS. The GPS antenna may or may not be shared with the cell phone antenna; the LNA is often discrete so as to be placed as close as possible to the antenna. In a cell phone, the RF blocks typically run from a supply in the V range, while the GPS baseband logic operating voltage will follow bulk CMOS trends, for example, 1.2V for 90-nanometer (nm) CMOS. In a tracking mode, the GPS RF blocks consume the most power. In an EPF analysis, it will clearly be desirable to minimize their On time.
24 Az antenna-egység Feladata a műholdak által kisugárzott jelek vétele, előerősítése és továbbítása a rádiófrekvenciás egységbe. Az antennának a horizont feletti tér fél tetszőleges irányából érkező mindkét vivőfrekvencia (L1 és L2 jel) vételére alkalmasnak kell lennie. A gyakorlatban a nál kisebb magassági szög alatt érkező jelek vételét az antenna jelleggöbéjének kialakításával vagy árnyékolással mesterségesen megnehezítik, ezek a jelek ugyanis legtöbbször a környező tereptárgyakról visszaverődött jelek. Minden GPS antenna körkörösen polarizált jelek vételére alkalmas. Rádiófrekvenciás rész A rádiófrekvenciás RF egység feladata az antennáról érkező nagyfrekvenciás jel középfrekvenciás KF jellé alakítása. Ezeket ezután már könnyen kezeli a vevő többi egysége. A bejövő jelet egy helyi oszcillátor tiszta szinuszos jelével keverik le. A saját, nagy stabilitású oszcillátoron kívül egyes vevők külső atomi oszcillátort is használnak. A középfrekvenciás jel még mindig tartalmazza azokat a modulációkat, melyek a kisugárzott jelben benne vannak, ám itt a frekvencia alacsonyabb. Ezt a módszert nevezzük szuperheterodin eljárásnak.
25 A jelkövető egységek Ez talán a GPS vevő legérdekesebb része, hisz ez az egység gondoskodik arról, hogy az egyidejűleg és egyetlen frekvencián beérkező akár műhold jelét a vevő szét tudja választani, majd biztosítja a műholdak folyamatos követését. A feladat első része viszonylag egyszerű, hisz minden műhold üzenete tartalmazza a kisugárzott műhold saját ún. PRN kódját. A sugárzás vagy a C/A, vagy a P kód felhasználásával történik. Az így azonosított műholdat a vevő ezután igyekszik egy különálló vevőcsatornához rendelni és azon folyamatosan követni. Mikroprocesszor egység A beépített mikroprocesszor többféle feladatot lát el. Így kivitelének minősége legalább annyira befolyásolja a mérés jóságát mint a korábban említett egyéb paraméterek. A ROM-ba épített vezérlő program végzi a zajhatások csökkentését, különféle szűrőrutinok futtatásával, realtime differenciális alkalmazásoknál felügyeli a korrekciós adatok előállítását és küldését, vagy fogadását és értelmezését. A navigációs vevők esetében az alapadatnak számító pozíció, sebesség és időadatokból is kiszámolja az összes, a navigációt segítő irány és eltérés adatot. Tápegység A GPS vevőkészülékek működéséhez szükséges elektromos energiát (készülék típustól és alkalmazási módtól függően) elemek, akkumulátorok, vagy AC/DC, DC/DC feszültségátalakítók biztosítják
26 A GPS működésének elvi alapjai A GPS működésének alapelvei egyszerűek. Az alapelvek gyakorlati alkalmazásához és a rendszer rendkívül pontos működésének biztosításához azonban korunk legfejlettebb technológiáira van szükség. A műholdas helymeghatározó rendszer gyakorlatilag egy "egyszerű" időmérésből kiszámított távolságmérésen alapul. A műholdakról sugárzott rádiójelek terjedési sebessége ismert, ezért két nagyon pontos óra és a rádióhullám kibocsátási és beérkezési idejének adatai alapján meghatározhatjuk a forrás távolságát. Ez a meghatározási módszer nem egyszerű folyamat: Az adott helyzetű műholdaktól való távolságok ismeretében a keresett pont koordinátáinak számítása Távolságmérés rádióhullámok segítségével A távméréshez szükséges igen nagy pontosságú időmérés A műhold pontos helyének meghatározása A GPS jel ionoszférikus és atmoszférikus késleltetésének és torzításának figyelembevétele
27 A műholdas helymeghatározás geometriai elve Km Km Km Km Km Km
28 Az i. állásponton működő vevőkészülék méri a műhold pillanatnyi távolságát és irányát, vagyis az r irányvektort. Amennyiben ismerjük a műhold koordinátáit, a vevő koordinátái ugyanabban a koordinátarendszerben számíthatók. Mivel a szatellitamódszerek közül pillanatnyilag egyik sem képes az r irányvektor mindhárom komponensét egyidőben szolgáltatni, ezért ha távolságmérést alkalmazunk, a vevőnek egyidőben 3 ismert koordinátájú műhold távolságát kell mérni. A GPS módszer esetében ez 4 műhold egyidejű mérését jelenti, mivel negyedik ismeretlenként kezeljük a vevőnk órájának eltérését a GPS rendszeridőtől. r3 r1 r4 r2 A mesterséges holdak koordinátái tetszőleges időpontra számíthatók a hold által sugárzott jelek kódolt paramétereiből. Ezek a koordináták geocentrikus, derékszögű X, Y, Z koordináták, melyek a WGS 84 referencia rendszerre vonatkoznak. A GPS mérések eredményeként elsődleges adatként WGS 84 rendszerben értelmezett geocentrikus, derékszögű X, Y, Z koordinátákat kapunk. Ezekből, - a megfelelő transzformációs paramétereket ismerve - tetszőleges dátumra, alaprendszerre vonatkoztatott koordinátákat számíthatunk.
29 A GPS MÉRÉS ELVE A GPS működésének elvi alapjai GPS technika a mesterséges holdak által kisugárzott rádiójelek vételén alapul. A GPS holdak fedélzetén elhelyezett oszcillátorok f 0= MHz alapfrekvencián működnek, rádiójeleket azonban két különböző frekvencián sugároznak. Az L1 és L2 jelűn. Az L1 frekvencia az alapfrekvencia 154 -szerese, az L szorosa. L1ŕ f1 =154 f0 = MHz. L2ŕ f2 =120 f0 = MHz. Ennek megfelelően a hullámhosszak: l 1= 19.0 cm és l 2= 24.4 cm. Ezeket a vivőhullámokat (carrier) különböző kódokkal modulálják annak érdekében, hogy információkat továbbíthassanak a vevők felé. A kódok +1 és -1 értékekből álló sorozatok, a kettes számrendszerbeli 0 és 1 számjegyeknek megfelelően. A kódolás elve a fázis billentyűzés ( biphase modulation ), azaz a vivőhullám fázisának 180 fokkal való eltolása akkor, ha a kód értéke ( +1 vagy -1 ) változik. A fázisbillentyűzés elvét az alábbi ábra szemlélteti.
30 A vivőhullám modulálásakor kétféle kódolást alkalmaznak. A C/A kód ( coarse/acquisition code ) frekvenciája f 0/10, azaz MHz - es frekvenciával követik egymást a +1 és -1 értékek. A kódsorozat minden ezredmásodpercben ismétlődik, és minden GPS hold esetén különböző. Ez teszi egyértelműen azonosíthatóvá a holdakat. A P - kód (precision code) frekvenciája megegyezik az f 0 alapfrekvenciával, és naponta ismétlődik. A holdak azonosítását itt az teszi lehetővé, hogy a kód " mintája" minden hold esetében egyedi. A P - kód teljes, napos ciklusának 7-7 napos darabját rendelték hozzá egy egy GPS holdhoz. A kód generálása minden vasárnap éjfélkor, a GPS hét kezdetén újra indul. A mesterséges holdakat azonosító PRN ( pseudorandom noise ) szám éppen arra utal, hogy a teljes P - kód melyik egyhetes szakaszát rendelték a holdhoz. Néhány éve új fogalom került a köztudatba, ez az Anti -Spoofing ( A - S). Az Anti Spoofing a P kód titkosítása annak elkerülése céljából, hogy valaki hamis információ sugárzásával illetéktelenül beavatkozhasson a rendszerbe. A titkosítás eredménye az Y kód, melyet csak a titkos konverziós algoritmus ismeretében lehet megfejteni.
31 A JELFELDOLGOZÁS ALAPELVEI Eddig a GPS holdak jelsugárzásának módjairól volt szó. A felhasználó számára legalább ilyen fontos kérdés, hogy hogyan juthat hozzá a jelek által hordozott információhoz, azaz hogyan működik a GPS vevő. A GPS két típusú mérést képes végezni. Az egyik az úgynevezett kód korrelációs technika, amely megkívánja legalább az egyik PRN kód ismeretét, a másik a kód nélküli technika. Minkét eljárás alkalmas a vivőhullám rekonstruálására, így annak fázisa meghatározható. A kód korrelációs technika a modulálatlan vivőhullám mellett a jel többi komponensét ( navigációs üzenet, órajel ) is megfejthetővé teszi. Az eljárás alaplépései a következők: - referencia rezgés keltése a vevőben - a referencia rezgés modulálása az ismert PRN kóddal - az ilyen módon kódolt referencia jel összehasonlítása ( korrelálása ) a műholdról vett jellel; a két jel kközötti időeltolódás (D t ) jelenti a műholdról érkező hullámok terjedési idejét - a kód eltávolítása a vett jelből, így a navigációs üzenet dekódolható, majd kiszűrhető - megmarad a modulálatlan vivőhullám, a fázismérés végrehajtható. Amennyiben a C/A kódot ismeri a vevő, az L1 vivőhullám rekonstruálható. A P kód ismeretében az L1 és L2 is. A kód nélküli eljárás a bejövő jelek négyzetelésén ( squaring ) alapul. A kódolás, vagyis a moduláció eltűnik, mivel a kódok +1 és -1 jelsorozatai négyzetre emelés után +1-et adnak. A moduláció megszűnése mellett a frekvencia megkétszereződése érdemel figyelmet. A négyzetelő eljárás előnye hogy független a kódoktól, hátránya hogy a jel/zaj viszony csökken. A két technika együttes alkalmazása is elképzelhető: az L1 vivőhullám rekonstruálása a C/A kód korrelációval, az L2-é négyzeteléssel. A GPS mérési adatok valójában távolságok, amelyek a vevőben eőállított, illetve a vett jelek összehasonlításával, idő- és fáziskülönbség mérése alapján határozhatunk meg. A GPS mérés egyutas módszer, amelyet a műhold és a vevő órajárási hibái befolyásolnak. Ezért a GPS-mérte, órahibákkal terhelt távolságokat pszeudo távolságoknak, ( pseudorange, áltávolság) nevezzük.
32 Modulo-2 recovery of GPS code Modulo-2 arithmetic: = 0; = 1; = 1; = 0 Bit shifts aligned MUST MOD-2 ADD RECEIVER-GENERATED CODE TO RECOVER
33 Schematic of C/A-code acquisition Since C/A-code is 1023 chips long and repeats every 1/1000 s, it is inherently ambiguous by 1 msec or ~300 km. Must modulo-2 add the transmitted and received codes after correlation to increase SNR and narrow bandwidth.
34 HELYMEGHATÁROZÁSI MÓDSZEREK A meghatározási módszereket az alábbiak szerint csoportosíthtjuk: abszolút vagy relatív statikus vagy kinematikus Az abszolút helymeghatározás egy független, egypontos meghatározás, ahol a koordinátákat kódmérésből, pszeudotávolság meghatározásból kapjuk a WGS-84 koordinátarendszerben, a méréssel egyidőben. Ehhez a mérési módszerhez egy vevőkészülék szükséges. A relatív helymeghatározás a pszeudotávolság, vagy vivőfázis szimultán mérését jelenti két vagy több ponton, ugyanazon holdakra. Ehhez a mérési módszerhez legalább két vevőkészülék szükséges. Fázismérésnél a relatív pontosság 1 ppm. A kapott koordináták a referenciaponthoz viszonyított értékek. Statikus mérési módszernél a vevő az észlelés teljes ideje alatt helyben marad, tehát sok fölös mérési eredmény adódik. Kinematikus módszernél a vevőkészülék folyamatosan mozog, fölös mérés nincs. Az abszolút statikus módszernél 1s-os mérési idő alatt a helymeghatározás pontossága valósidejű mérésnél: Az abszolút statikus módszernél 1s-os mérési idő alatt a helymeghatározás pontossága valósidejű mérésnél: C/A kóddal:20-50m P kóddal:5-20m
35 Az abszolút - kinematikus módszerrel 1 ms -os mérési idő alatt a maximálisan elérhető pontosság méter. E pontosság eléréséhez a mozgásban lévő vevőnek folyamatosan, szimultán 4 műholdra kell mérnie. Ez a mérési módszer széleskörűen elterjedt a vízi, szárazföldi és léginavigációban. Ezzel a módszerrel a járművek mozgási pályáját lehet meghatározni. A relatív statikus módszernek van a legnagyobb jelentősége geodéziai szempontból, főleg fázismérés esetében, mert így érhető el maximális pontosság GPS -szel. Rövidebb bázisok esetében centiméter alatti. Precíz pályaelemeket használva a pontosság tovább javulhat, elérheti akár a 0.01 ppm -et is.ez a módszer széleskörűen alkalmazható alappontsűrítésnél, hagyományos terepfelméréseknél, ipari geodéziában, fotogrammetriában. A relatív - kinematikus módszer alkalmas a vevő útvonalának rövid idö alatt való meghatározására. A mérést egy álló, és egy mozgó vevővel végezzük. A mérés kezdetekor két ismert ponton abszolút kinematikus módszerrel meghatározzuk a koordinátákat. Ezután az egyik vevőantennát a kezdőponton hagyjuk, a másikkal pedig pontról pontra haladva folyamatos mérést végzünk.egy - egy új ponton megállva, a mérés időtartama néhány másodperctől 1 percig terjedhet. Vivőfázis mérésekor az elérhető pontosság néhány centiméter, kódméréssel néhány méter. Mivel ezzel a módszerrel nagy számú pont gyors és pontos meghatározása lehetséges, nagy jövője van a geodéziában A kinematikus módszernek több változatát is kidolgozták, melyeket a különböző elnevezéseikkel ismertetek. Stop and go ( félkinematikus módszer ) Ez a módszer a statikus és a kinematikus relatív helymeghatározások kombinációja. A mérés során az egyik vevő végig egy ponton áll, a másik az új pontok között mozog, majd rövid időre az új ponton megáll. A módszer jellemzője, hogy a meghatározás pontossága az álló helyzetben végzett mérésnél növekszik, mivel az eredmény több mérési adat átlagából születik. Ezt a mérési módszert gyakran csak kinematikus felmérésnek nevezik. ( kinematic surveying )
Alapok GPS előzmnyei Navstar How the GPS locate the position Tények Q/A GPS. Varsányi Péter
 Alapok előzmnyei Navstar How the locate the position Tények Q/A Óbudai Egyetem Alba Regia Egyetemi Központ (AREK) Székesfehérvár 2011. december 8. Alapok előzmnyei Navstar How the locate the position Tények
Alapok előzmnyei Navstar How the locate the position Tények Q/A Óbudai Egyetem Alba Regia Egyetemi Központ (AREK) Székesfehérvár 2011. december 8. Alapok előzmnyei Navstar How the locate the position Tények
Híradástechnika I. 5.ea
 } Híradástechnika I. 5.ea Dr.Varga Péter János 2 Műholdas kommunikáció 3 4 Alkalmazott műholdpályák, tulajdonságaik 5 Alkalmazott műholdpályák, tulajdonságaik A LEO [Low Earth Orbiter ] magába foglalja
} Híradástechnika I. 5.ea Dr.Varga Péter János 2 Műholdas kommunikáció 3 4 Alkalmazott műholdpályák, tulajdonságaik 5 Alkalmazott műholdpályák, tulajdonságaik A LEO [Low Earth Orbiter ] magába foglalja
HÍRADÁSTECHNIKA I. Dr.Varga Péter János
 6. HÍRADÁSTECHNIKA I. Dr.Varga Péter János 2 Műholdas kommunikáció 3 4 Helymeghatározás 5 Alkalmazott műholdpályák, tulajdonságaik 6 Alkalmazott műholdpályák, tulajdonságaik A LEO [Low Earth Orbiter ]
6. HÍRADÁSTECHNIKA I. Dr.Varga Péter János 2 Műholdas kommunikáció 3 4 Helymeghatározás 5 Alkalmazott műholdpályák, tulajdonságaik 6 Alkalmazott műholdpályák, tulajdonságaik A LEO [Low Earth Orbiter ]
A távérzékelésről. A műholdas helymeghatározás GPS 2012.05.18. 1
 A távérzékelésről. A műholdas helymeghatározás GPS 2012.05.18. 1 A térbeli adatok meghatározása elsődleges geometriai adatnyerési eljárások, másodlagos adatnyerési eljárások 2012.05.18. 2 Az elsődleges
A távérzékelésről. A műholdas helymeghatározás GPS 2012.05.18. 1 A térbeli adatok meghatározása elsődleges geometriai adatnyerési eljárások, másodlagos adatnyerési eljárások 2012.05.18. 2 Az elsődleges
Hegyi Ádám István ELTE, április 25.
 Hegyi Ádám István ELTE, 2012. április 25. GPS = Global Positioning System Department of Defense = Amerikai Egyesült Államok Védelmi Minisztériuma 1973 DNSS = Defense Navigation Satellite System vagy Navstar-GPS
Hegyi Ádám István ELTE, 2012. április 25. GPS = Global Positioning System Department of Defense = Amerikai Egyesült Államok Védelmi Minisztériuma 1973 DNSS = Defense Navigation Satellite System vagy Navstar-GPS
Kincskeresés GPS-el: a korszerű navigáció alapjai
 2007. február 22. : a korszerű navigáció alapjai Kovács Béla Térképtudományi és Geoinformatikai Tanszék Eötvös Loránd Tudományegyetem, Informatika Kar Térképtudományi és Geoinformatikai Tanszék 1117 Budapest,
2007. február 22. : a korszerű navigáció alapjai Kovács Béla Térképtudományi és Geoinformatikai Tanszék Eötvös Loránd Tudományegyetem, Informatika Kar Térképtudományi és Geoinformatikai Tanszék 1117 Budapest,
INFORMATIKA ÁGAZATI ALKALMAZÁSAI. Az Agrármérnöki MSc szak tananyagfejlesztése TÁMOP-4.1.2-08/1/A-2009-0010
 INFORMATIKA ÁGAZATI ALKALMAZÁSAI Az Agrármérnöki MSc szak tananyagfejlesztése TÁMOP-4.1.2-08/1/A-2009-0010 10. GPS, GPRS (mobilkommunikációs) ismeretek Helymeghatározás GPS rendszer alapelve GNSS rendszerek
INFORMATIKA ÁGAZATI ALKALMAZÁSAI Az Agrármérnöki MSc szak tananyagfejlesztése TÁMOP-4.1.2-08/1/A-2009-0010 10. GPS, GPRS (mobilkommunikációs) ismeretek Helymeghatározás GPS rendszer alapelve GNSS rendszerek
2007. március 23. INFO SAVARIA 2007. GNSS alapok. Eötvös Loránd Tudományegyetem, Informatika Kar. Térképtudományi és Geoinformatikai Tanszék
 2007. március 23. INFO SAVARIA 2007 GPS/GNSS GNSS alapok Kovács Béla Térképtudományi és Geoinformatikai Tanszék Eötvös Loránd Tudományegyetem, Informatika Kar Térképtudományi és Geoinformatikai Tanszék
2007. március 23. INFO SAVARIA 2007 GPS/GNSS GNSS alapok Kovács Béla Térképtudományi és Geoinformatikai Tanszék Eötvös Loránd Tudományegyetem, Informatika Kar Térképtudományi és Geoinformatikai Tanszék
TestLine - nummulites_gnss Minta feladatsor
 1.* Egy műholdas helymeghatározás lehet egyszerre abszolút és kinematikus. 2.* műholdak pillanatnyi helyzetéből és a megmért távolságokból számítható a vevő pozíciója. 3.* 0:55 Nehéz kinai BEIDOU, az amerikai
1.* Egy műholdas helymeghatározás lehet egyszerre abszolút és kinematikus. 2.* műholdak pillanatnyi helyzetéből és a megmért távolságokból számítható a vevő pozíciója. 3.* 0:55 Nehéz kinai BEIDOU, az amerikai
HÍRADÁSTECHNIKA I. Dr.Varga Péter János
 3. HÍRADÁSTECHNIKA I. Dr.Varga Péter János 2 Műholdas kommunikáció 3 4 Helymeghatározás 5 Alkalmazott műholdpályák, tulajdonságaik 6 Alkalmazott műholdpályák, tulajdonságaik A LEO [Low Earth Orbiter ]
3. HÍRADÁSTECHNIKA I. Dr.Varga Péter János 2 Műholdas kommunikáció 3 4 Helymeghatározás 5 Alkalmazott műholdpályák, tulajdonságaik 6 Alkalmazott műholdpályák, tulajdonságaik A LEO [Low Earth Orbiter ]
GPS és atomóra. Kunsági-Máté Sándor. Fizikus MSc 1. évfolyam
 GPS és atomóra Kunsági-Máté Sándor Fizikus MSc 1. évfolyam Informatikai eszközök fizikai alapjai, 2017. március 1. Eötvös Loránd Tudományegyetem, Természettudományi Kar, Budapest Történeti bevezető 1957
GPS és atomóra Kunsági-Máté Sándor Fizikus MSc 1. évfolyam Informatikai eszközök fizikai alapjai, 2017. március 1. Eötvös Loránd Tudományegyetem, Természettudományi Kar, Budapest Történeti bevezető 1957
GPS. 1.a A GLONASS rendszer. Feladata. A rendszer felépítése. A GLONASS és s a GALILEO GPS- rendszerek. Céljaiban NAVSTAR GPS rendszerhez
 GPS A GLONASS és s a GALILEO GPS- rendszerek Összeállította: Szűcs LászlL szló 1.a A GLONASS rendszer Globális lis Navigáci ciós s Műholdrendszer M orosz elnevezés s rövidr vidítése Céljaiban és s kialakításában
GPS A GLONASS és s a GALILEO GPS- rendszerek Összeállította: Szűcs LászlL szló 1.a A GLONASS rendszer Globális lis Navigáci ciós s Műholdrendszer M orosz elnevezés s rövidr vidítése Céljaiban és s kialakításában
ADATÁTVITELI RENDSZEREK A GLOBÁLIS LOGISZTIKÁBAN
 9. ELŐADÁS ADATÁTVITELI RENDSZEREK A GLOBÁLIS LOGISZTIKÁBAN A logisztikai rendszerek irányításához szükség van az adatok továbbítására a rendszer különböző elemei között. Ezt a feladatot a különböző adatátviteli
9. ELŐADÁS ADATÁTVITELI RENDSZEREK A GLOBÁLIS LOGISZTIKÁBAN A logisztikai rendszerek irányításához szükség van az adatok továbbítására a rendszer különböző elemei között. Ezt a feladatot a különböző adatátviteli
GNSS Modernizáció. Horváth Tamás FÖMI Kozmikus Geodéziai Obszervatórium Penc. Tea előadás, 2006. június 1., Penc
 1 GNSS Modernizáció Horváth Tamás FÖMI Kozmikus Geodéziai Obszervatórium Penc Tea előadás, 2006. június 1., Penc Tartalom GPS GLONASS Galileo 2 GPS Block IIR Block IIA Block IIF 3 A GPS pontossága GPS
1 GNSS Modernizáció Horváth Tamás FÖMI Kozmikus Geodéziai Obszervatórium Penc Tea előadás, 2006. június 1., Penc Tartalom GPS GLONASS Galileo 2 GPS Block IIR Block IIA Block IIF 3 A GPS pontossága GPS
A GPS pozíciók pontosításának lehetőségei
 A GPS pozíciók pontosításának lehetőségei GIS OPEN 2005 Bartha Csaba csaba.bartha@geopro.hu Milyen fogalmakkal találkozunk? VRS GPS FKP EGNOS DGPS RTCM OGPSH GLONASS WAAS RTK STATIKUS GSM KINEMATIKUS URH
A GPS pozíciók pontosításának lehetőségei GIS OPEN 2005 Bartha Csaba csaba.bartha@geopro.hu Milyen fogalmakkal találkozunk? VRS GPS FKP EGNOS DGPS RTCM OGPSH GLONASS WAAS RTK STATIKUS GSM KINEMATIKUS URH
, ,457. GNSS technológia Budapest június 20 július 1.
 110,457 110,457 2 1 3 4 2 GNNS Elv, módszerek, Budapest 2016. június Földmérési és Távérzékelési Intézet Navigare necesse est, vivere non est necesse! Hajózni kell, élni nem kell!", Pompeius 6 3 TÁJÉKOZÓDÁS
110,457 110,457 2 1 3 4 2 GNNS Elv, módszerek, Budapest 2016. június Földmérési és Távérzékelési Intézet Navigare necesse est, vivere non est necesse! Hajózni kell, élni nem kell!", Pompeius 6 3 TÁJÉKOZÓDÁS
GPS szótár. A legfontosabb 25 kifejezés a GPS világából. Készítette: Gere Tamás A GPSArena.hu alapítója
 A legfontosabb 25 kifejezés a GPS világából Készítette: Gere Tamás A GPSArena.hu alapítója 2D/3D vétel Megadja, hogy a GPS vétel síkbeli (2D) vagy térbeli (3D). Utóbbi esetben magassági adat is rendelkezésre
A legfontosabb 25 kifejezés a GPS világából Készítette: Gere Tamás A GPSArena.hu alapítója 2D/3D vétel Megadja, hogy a GPS vétel síkbeli (2D) vagy térbeli (3D). Utóbbi esetben magassági adat is rendelkezésre
Babeș Bólyai Tudományegyetem Informatika kar Műholdas helymeghatározás a GPS rendszerrel
 Babeș Bólyai Tudományegyetem Informatika kar Műholdas helymeghatározás a GPS rendszerrel Szűcs Attila Levente Kolozsvár, 2010 Április 29. 1. Bevezető A GPS az angol Global Positioning System megnevezés
Babeș Bólyai Tudományegyetem Informatika kar Műholdas helymeghatározás a GPS rendszerrel Szűcs Attila Levente Kolozsvár, 2010 Április 29. 1. Bevezető A GPS az angol Global Positioning System megnevezés
Hol tart a GNSS állapot-tér modellezés bevezetése?
 Hol tart a GNSS állapot-tér modellezés bevezetése? Horváth Tamás FÖMI Kozmikus Geodéziai Obszervatórium horvath@gnssnet.hu www.gnssnet.hu Tel: +36-27-374-980, Mobil: +36-30-867-2570 Rédey István Geodéziai
Hol tart a GNSS állapot-tér modellezés bevezetése? Horváth Tamás FÖMI Kozmikus Geodéziai Obszervatórium horvath@gnssnet.hu www.gnssnet.hu Tel: +36-27-374-980, Mobil: +36-30-867-2570 Rédey István Geodéziai
Kozmikus geodézia MSc
 Kozmikus geodézia MSc 1-4 előadás: Tóth Gy. 5-13 előadás: Ádám J. 2 ZH: 6/7. és 12/13. héten (max. 30 pont) alapismeretek, csillagkatalógusok, koordináta- és időrendszerek, függővonal iránymeghatározása
Kozmikus geodézia MSc 1-4 előadás: Tóth Gy. 5-13 előadás: Ádám J. 2 ZH: 6/7. és 12/13. héten (max. 30 pont) alapismeretek, csillagkatalógusok, koordináta- és időrendszerek, függővonal iránymeghatározása
HÍRADÁSTECHNIKA. 5.ea. Dr.Varga Péter János
 HÍRADÁSTECHNIKA 5.ea Dr.Varga Péter János 2 Műholdas kommunikáció 3 4 Helymeghatározás 5 Alkalmazott műholdpályák, tulajdonságaik 6 Alkalmazott műholdpályák, tulajdonságaik A LEO [Low Earth Orbiter ] magába
HÍRADÁSTECHNIKA 5.ea Dr.Varga Péter János 2 Műholdas kommunikáció 3 4 Helymeghatározás 5 Alkalmazott műholdpályák, tulajdonságaik 6 Alkalmazott műholdpályák, tulajdonságaik A LEO [Low Earth Orbiter ] magába
HÍRKÖZLÉSTECHNIKA. 4.ea. Dr.Varga Péter János
 HÍRKÖZLÉSTECHNIKA 4.ea Dr.Varga Péter János Pont-pont összeköttetés tervezése 2 Wifi Fresnel 3 Pont-pont összeköttetés tervezése 4 Pont-pont összeköttetés tervezése 5 Tengeri kábelezés 6 7 Műholdas kommunikáció
HÍRKÖZLÉSTECHNIKA 4.ea Dr.Varga Péter János Pont-pont összeköttetés tervezése 2 Wifi Fresnel 3 Pont-pont összeköttetés tervezése 4 Pont-pont összeköttetés tervezése 5 Tengeri kábelezés 6 7 Műholdas kommunikáció
A PPP. a vonatkoztatási rendszer, az elmélet és gyakorlat összefüggése egy Fehérvár környéki kísérleti GNSS-mérés tapasztalatai alapján
 GISopen konferencia, Székesfehérvár, 2017. 04. 11-13. A PPP a vonatkoztatási rendszer, az elmélet és gyakorlat összefüggése egy Fehérvár környéki kísérleti GNSS-mérés tapasztalatai alapján Busics György
GISopen konferencia, Székesfehérvár, 2017. 04. 11-13. A PPP a vonatkoztatási rendszer, az elmélet és gyakorlat összefüggése egy Fehérvár környéki kísérleti GNSS-mérés tapasztalatai alapján Busics György
Helymeghatározó rendszerek
 Helymeghatározó rendszerek objektumok (járművek, utazók, áruk, stb.) térbeli jellemzői + digitális térkép forgalomirányító, forgalombefolyásoló és navigációs rendszerek, valamint a helytől függő információs
Helymeghatározó rendszerek objektumok (járművek, utazók, áruk, stb.) térbeli jellemzői + digitális térkép forgalomirányító, forgalombefolyásoló és navigációs rendszerek, valamint a helytől függő információs
LOKÁLIS IONOSZFÉRA MODELLEZÉS ÉS ALKALMAZÁSA A GNSS HELYMEGHATÁROZÁSBAN
 LOKÁLIS IONOSZFÉRA MODELLEZÉS ÉS ALKALMAZÁSA A GNSS HELYMEGHATÁROZÁSBAN Juni Ildikó Budapesti Műszaki és Gazdaságtudományi Egyetem BSc IV. évfolyam Konzulens: Dr. Rózsa Szabolcs MFTT 29. Vándorgyűlés,
LOKÁLIS IONOSZFÉRA MODELLEZÉS ÉS ALKALMAZÁSA A GNSS HELYMEGHATÁROZÁSBAN Juni Ildikó Budapesti Műszaki és Gazdaságtudományi Egyetem BSc IV. évfolyam Konzulens: Dr. Rózsa Szabolcs MFTT 29. Vándorgyűlés,
HÍRADÁSTECHNIKA. Dr.Varga Péter János
 HÍRADÁSTECHNIKA Dr.Varga Péter János 2 A jelátvitel fizikai közegei 3 Vezeték nélküli átvitel Optikai átvitel - Lézer átvitel 4 pont-pont közötti adatátvitel, láthatóság átvitel lézerrel néhány km távolság
HÍRADÁSTECHNIKA Dr.Varga Péter János 2 A jelátvitel fizikai közegei 3 Vezeték nélküli átvitel Optikai átvitel - Lézer átvitel 4 pont-pont közötti adatátvitel, láthatóság átvitel lézerrel néhány km távolság
Interferencia jelenségek a BME permanens állomásán
 Interferencia jelenségek a BME permanens állomásán Takács Bence, egyetemi docens takacs.bence@epito.bme.hu Rédey szeminárium 2017. március 3. Nagy teljesítményű blokkolók hatótávolság : 200 km adó teljesítmény
Interferencia jelenségek a BME permanens állomásán Takács Bence, egyetemi docens takacs.bence@epito.bme.hu Rédey szeminárium 2017. március 3. Nagy teljesítményű blokkolók hatótávolság : 200 km adó teljesítmény
Rádiófrekvenciás kommunikációs rendszerek
 Rádiófrekvenciás kommunikációs rendszerek Adó Adó Vevő Jellemzően broadcast adás (széles földrajzi terület besugárzása, TV, Rádió műsor adás) Adó Vevő Vevő Adó Különböző kommunikációs formák. Kis- és nagykapacitású
Rádiófrekvenciás kommunikációs rendszerek Adó Adó Vevő Jellemzően broadcast adás (széles földrajzi terület besugárzása, TV, Rádió műsor adás) Adó Vevő Vevő Adó Különböző kommunikációs formák. Kis- és nagykapacitású
BT-R820 Használati utasítás BT-R820 Wireless GPS Egység Használati utasítás Dátum: Szeptember, 2006 Verzió: 1.1
 BT-R820 Wireless GPS Egység Használati utasítás Dátum: Szeptember, 2006 Verzió: 1.1 1. oldal TARTALOMJEGYZÉK 0. Gyors telepítés...3 1. Bevezetés...4 1.1 Áttekintés...4 1.2 Fő jellemzők...4 1.3 Alkalmazási
BT-R820 Wireless GPS Egység Használati utasítás Dátum: Szeptember, 2006 Verzió: 1.1 1. oldal TARTALOMJEGYZÉK 0. Gyors telepítés...3 1. Bevezetés...4 1.1 Áttekintés...4 1.2 Fő jellemzők...4 1.3 Alkalmazási
Takács Bence GPS: pontosság és megbízhatóság. Földmérők Világnapja és Európai Földmérők és Geoinformatikusok Napja Budapest, március 21.
 Takács Bence GPS: pontosság és megbízhatóság Földmérők Világnapja és Európai Földmérők és Geoinformatikusok Napja Budapest, 2018. március 21. AIRBUS A320 LOW VISIBILITY ILS CAT III AUTOLAND APPROACH IN
Takács Bence GPS: pontosság és megbízhatóság Földmérők Világnapja és Európai Földmérők és Geoinformatikusok Napja Budapest, 2018. március 21. AIRBUS A320 LOW VISIBILITY ILS CAT III AUTOLAND APPROACH IN
A GNSS infrastruktúrára támaszkodó műholdas helymeghatározás. Borza Tibor (FÖMI KGO) Busics György (NyME GEO)
 Busics György (NyME GEO)") A GNSS infrastruktúrára támaszkodó műholdas helymeghatározás Borza Tibor (FÖMI KGO) Busics György (NyME GEO) Tartalom Mi a GNSS, a GNSS infrastruktúra? Melyek az infrastruktúra szintjei? Mi a hazai helyzet?
A GNSS infrastruktúrára támaszkodó műholdas helymeghatározás Borza Tibor (FÖMI KGO) Busics György (NyME GEO) Tartalom Mi a GNSS, a GNSS infrastruktúra? Melyek az infrastruktúra szintjei? Mi a hazai helyzet?
Aktív GNSS hálózat fejlesztése
 Aktív GNSS hálózat fejlesztése a penci KGO-ban Horváth Tamás Rédey István Szeminárium, BME, 2004. november 17. Tartalom Háttér Abszolút GNSS helymeghatározás Standalone DGNSS és RTK referencia állomások
Aktív GNSS hálózat fejlesztése a penci KGO-ban Horváth Tamás Rédey István Szeminárium, BME, 2004. november 17. Tartalom Háttér Abszolút GNSS helymeghatározás Standalone DGNSS és RTK referencia állomások
GISopen 2012, Székesfehérvár Indoor-Positioning. Gombás László
 GISopen 2012, Székesfehérvár Indoor-Positioning Gombás László Az Indoor Positioning módszerek Forrás: Rainer Mautz 2011: Overview of Indoor Positioning Technologies, Keynotes, IPIN 2011, Guimaraes 2 GNSS
GISopen 2012, Székesfehérvár Indoor-Positioning Gombás László Az Indoor Positioning módszerek Forrás: Rainer Mautz 2011: Overview of Indoor Positioning Technologies, Keynotes, IPIN 2011, Guimaraes 2 GNSS
Globális mőholdas navigációs rendszerek
 Globális mőholdas navigációs rendszerek Oktatási segédanyag a vadgazda MSc levelezı hallgatók számára az EG520 Geomatikai és térinformatikai ismeretek címő tárgyhoz Készítette: Bazsó Tamás Kiegészítette:
Globális mőholdas navigációs rendszerek Oktatási segédanyag a vadgazda MSc levelezı hallgatók számára az EG520 Geomatikai és térinformatikai ismeretek címő tárgyhoz Készítette: Bazsó Tamás Kiegészítette:
GPS. Lehoczki Róbert Vadvilág Megőrzési Intézet Szent István Egyetem, Gödöllő
 GPS Lehoczki Róbert Vadvilág Megőrzési Intézet Szent István Egyetem, Gödöllő Három technológiát egyesít: GPS (helymeghatározás) Robosztus terepen is használható hardver Egyszerű és hatékony szoftver Mire
GPS Lehoczki Róbert Vadvilág Megőrzési Intézet Szent István Egyetem, Gödöllő Három technológiát egyesít: GPS (helymeghatározás) Robosztus terepen is használható hardver Egyszerű és hatékony szoftver Mire
Székesfehérvár
 1 2009.03.19. - Székesfehérvár System1200-2004 SmartStation - 2005 SmartRover - 2006 SmartPole/TPS1200+ 2007 SmartRTK + MAC 2008 GPS1200+ GNSS 2009-200? 2 ? Elérhető GNSS jelek haszn. Modern hálózati megold.
1 2009.03.19. - Székesfehérvár System1200-2004 SmartStation - 2005 SmartRover - 2006 SmartPole/TPS1200+ 2007 SmartRTK + MAC 2008 GPS1200+ GNSS 2009-200? 2 ? Elérhető GNSS jelek haszn. Modern hálózati megold.
A műholdas helymeghatározás alapjai
 Népszerűen a műholdas helymeghatározásról és navigációról 1. rész Az idő mérése, karóránk leolvasása, ma mindannyiunk számára természetes tevékenység. De vajon ugyanilyen természetes és szükséges lesz-e
Népszerűen a műholdas helymeghatározásról és navigációról 1. rész Az idő mérése, karóránk leolvasása, ma mindannyiunk számára természetes tevékenység. De vajon ugyanilyen természetes és szükséges lesz-e
INFORMATIKA ÁGAZATI ALKALMAZÁSAI. Az Agrármérnöki MSc szak tananyagfejlesztése TÁMOP /1/A
 INFORMATIKA ÁGAZATI ALKALMAZÁSAI Az Agrármérnöki MSc szak tananyagfejlesztése TÁMOP-4.1.2-08/1/A-2009-0010 11. Globális helymeghatározás pontosító rendszerei Pontosságot befolyásoló tényezők Differenciális
INFORMATIKA ÁGAZATI ALKALMAZÁSAI Az Agrármérnöki MSc szak tananyagfejlesztése TÁMOP-4.1.2-08/1/A-2009-0010 11. Globális helymeghatározás pontosító rendszerei Pontosságot befolyásoló tényezők Differenciális
Agrár-környezetvédelmi Modul Agrár-környezetvédelem, agrotechnológia. KÖRNYEZETGAZDÁLKODÁSI MÉRNÖKI MSc TERMÉSZETVÉDELMI MÉRNÖKI MSc
 Agrár-környezetvédelmi Modul Agrár-környezetvédelem, agrotechnológia KÖRNYEZETGAZDÁLKODÁSI MÉRNÖKI MSc TERMÉSZETVÉDELMI MÉRNÖKI MSc Precíziós mezőgazdaság információ technológiai alapjai II. 138.lecke
Agrár-környezetvédelmi Modul Agrár-környezetvédelem, agrotechnológia KÖRNYEZETGAZDÁLKODÁSI MÉRNÖKI MSc TERMÉSZETVÉDELMI MÉRNÖKI MSc Precíziós mezőgazdaság információ technológiai alapjai II. 138.lecke
PPP-RTK a hálózati RTK jövője?
 1 PPP-RTK a hálózati RTK jövője? Horváth Tamás FÖMI Kozmikus Geodéziai Obszervatórium Penc Rédey Szeminárium, BME, 006. április 6., Budapest Tartalom Emlékeztető Mérés-tér, állapot-tér PPP PPP-RTK Emlékeztető
1 PPP-RTK a hálózati RTK jövője? Horváth Tamás FÖMI Kozmikus Geodéziai Obszervatórium Penc Rédey Szeminárium, BME, 006. április 6., Budapest Tartalom Emlékeztető Mérés-tér, állapot-tér PPP PPP-RTK Emlékeztető
TÉRINFORMATIKA II. Dr. Kulcsár Balázs Ph.D. adjunktus. Debreceni Egyetem Műszaki Kar Műszaki Alaptárgyi Tanszék
 TÉRINFORMATIKA II. Dr. Kulcsár Balázs Ph.D. adjunktus Debreceni Egyetem Műszaki Kar Műszaki Alaptárgyi Tanszék ELSŐDLEGES ADATNYERÉSI ELJÁRÁSOK 1. Geodézia Fotogrammetria Mesterséges holdak GEOMETRIAI
TÉRINFORMATIKA II. Dr. Kulcsár Balázs Ph.D. adjunktus Debreceni Egyetem Műszaki Kar Műszaki Alaptárgyi Tanszék ELSŐDLEGES ADATNYERÉSI ELJÁRÁSOK 1. Geodézia Fotogrammetria Mesterséges holdak GEOMETRIAI
Mobil térinformatikai feladatmegoldások támogatása GNSS szolgáltatással
 Mobil térinformatikai feladatmegoldások támogatása GNSS szolgáltatással Horváth Tamás FÖMI Kozmikus Geodéziai Obszervatórium horvath@gnssnet.hu www.gnssnet.hu Tel.: 06-27-200-930 Mobil: 06-30-867-2570
Mobil térinformatikai feladatmegoldások támogatása GNSS szolgáltatással Horváth Tamás FÖMI Kozmikus Geodéziai Obszervatórium horvath@gnssnet.hu www.gnssnet.hu Tel.: 06-27-200-930 Mobil: 06-30-867-2570
KUTATÁSI JELENTÉS. Multilaterációs radarrendszer kutatása. Szüllő Ádám
 KUTATÁSI JELENTÉS Multilaterációs radarrendszer kutatása Szüllő Ádám 212 Bevezetés A Mikrohullámú Távérzékelés Laboratórium jelenlegi K+F tevékenységei közül ezen jelentés a multilaterációs radarrendszerek
KUTATÁSI JELENTÉS Multilaterációs radarrendszer kutatása Szüllő Ádám 212 Bevezetés A Mikrohullámú Távérzékelés Laboratórium jelenlegi K+F tevékenységei közül ezen jelentés a multilaterációs radarrendszerek
GPS Jamming a GPS jelek szándékos zavarása
 GPS Jamming a GPS jelek szándékos zavarása Horváth Tamás BME Általános- és Felsőgeodézia tanszék 2005. április 26. Tartalom Háttér Civil és katonai GPS felhasználók A sebezhető GPS Nem szándékos zavarás
GPS Jamming a GPS jelek szándékos zavarása Horváth Tamás BME Általános- és Felsőgeodézia tanszék 2005. április 26. Tartalom Háttér Civil és katonai GPS felhasználók A sebezhető GPS Nem szándékos zavarás
A GPS-rendszer. Adatgyűjtés A GPS. Helymeghatározási eljárások. 1. Földi geodéziai módszerek Mérőállomás
 Adatgyűjtés A GPS-rendszer Összeállította: Szűcs László Geometriai adatok gyűjtése Attribútum adatok gyűjtés Adatnyerés elsődleges: méréskor a tárgyal vagy képével fizikai kapcsolatba kerülünk másodlagos:
Adatgyűjtés A GPS-rendszer Összeállította: Szűcs László Geometriai adatok gyűjtése Attribútum adatok gyűjtés Adatnyerés elsődleges: méréskor a tárgyal vagy képével fizikai kapcsolatba kerülünk másodlagos:
I. Telematikai rendszerek
 I. Telematikai rendszerek Telekommunikáció+Informatika=TeleMatika TRACKING & TRACING - áru és jármű nyomon követés, útvonaltervezés TRANSZPONDERES azonosítás veszélyes, romlandó áruk kezelése NAVIGÁCIÓ
I. Telematikai rendszerek Telekommunikáció+Informatika=TeleMatika TRACKING & TRACING - áru és jármű nyomon követés, útvonaltervezés TRANSZPONDERES azonosítás veszélyes, romlandó áruk kezelése NAVIGÁCIÓ
GNSS a precíziós mezőgazdaságban
 GNSS a precíziós mezőgazdaságban 2015.10.27. 1/14 GNSS a precíziós mezőgazdaságban Horváth Tamás Alberding GmbH GPS25 Konferencia Műholdas helymeghatározás Magyarországon 1990-2015 2015. október 27., Budapest
GNSS a precíziós mezőgazdaságban 2015.10.27. 1/14 GNSS a precíziós mezőgazdaságban Horváth Tamás Alberding GmbH GPS25 Konferencia Műholdas helymeghatározás Magyarországon 1990-2015 2015. október 27., Budapest
Műholdas infokommunikációs rendszerek
 Mobil Informatika Műholdas infokommunikációs rendszerek Dr. Kutor László OE-NIK, Dr.Kutor László MoI 4/24/1 Műholdas távközlési rendszerek GEO (Geostationary Earth Orbit Satellite) Geostacionáris pályán
Mobil Informatika Műholdas infokommunikációs rendszerek Dr. Kutor László OE-NIK, Dr.Kutor László MoI 4/24/1 Műholdas távközlési rendszerek GEO (Geostationary Earth Orbit Satellite) Geostacionáris pályán
GNSS/RNSS rendszerek a földmegfigyelésben. Dr. Rózsa Szabolcs. Általános és Felsőgeodézia Tanszék
 GNSS/RNSS rendszerek a földmegfigyelésben Általános és Felsőgeodézia Tanszék Dr. Rózsa Szabolcs Minőségorientált, összehangolt oktatási és K+F+I stratégia, valamint működési modell kidolgozása a Műegyetemen
GNSS/RNSS rendszerek a földmegfigyelésben Általános és Felsőgeodézia Tanszék Dr. Rózsa Szabolcs Minőségorientált, összehangolt oktatási és K+F+I stratégia, valamint működési modell kidolgozása a Műegyetemen
Spectra Precision GNSS eszközök
 Spectra Precision GNSS eszközök Magyar Földmérési, Térképészeti és Távérzékelési Társaság 29. VÁNDORGYŰLÉS Sopron, 2013. július 11 13. Érsek Ákos GPSCOM Kft. SPECTRA PRECISION termékskála Térképező GPS
Spectra Precision GNSS eszközök Magyar Földmérési, Térképészeti és Távérzékelési Társaság 29. VÁNDORGYŰLÉS Sopron, 2013. július 11 13. Érsek Ákos GPSCOM Kft. SPECTRA PRECISION termékskála Térképező GPS
Helymeghatározó technikák
 Mobil Informatika Dr. Kutor László Helymeghatározó technikák http://uni-obuda.hu/users/kutor/ MoI 5/24/1 Műholdas távközlési rendszerek GEO (Geostationary Earth Orbit Satellite) Geostacionáris pályán keringő
Mobil Informatika Dr. Kutor László Helymeghatározó technikák http://uni-obuda.hu/users/kutor/ MoI 5/24/1 Műholdas távközlési rendszerek GEO (Geostationary Earth Orbit Satellite) Geostacionáris pályán keringő
A rendszer legfontosabb jellemzőit az alábbiakban foglalhatjuk össze:
 GPS nyomkövető készülék, illetve navigációs rendszerek A GPS a Global Positioning System angol rövidítése és globális helymeghatározó rendszert jelent. Egy rendszer, amely 24 műholdból áll, melyet az USA
GPS nyomkövető készülék, illetve navigációs rendszerek A GPS a Global Positioning System angol rövidítése és globális helymeghatározó rendszert jelent. Egy rendszer, amely 24 műholdból áll, melyet az USA
Alacsonypályás műholdvétel megvalósítása szoftverrádiós eszközökkel. Dudás Levente
 Alacsonypályás műholdvétel megvalósítása szoftverrádiós eszközökkel Dudás Levente 2013 1 Tartalomjegyzék Alacsonypályás műholdvétel magvalósítása szoftverrádiós eszközökkel... 1 1. A teszteléshez használt
Alacsonypályás műholdvétel megvalósítása szoftverrádiós eszközökkel Dudás Levente 2013 1 Tartalomjegyzék Alacsonypályás műholdvétel magvalósítása szoftverrádiós eszközökkel... 1 1. A teszteléshez használt
A műholdas helymeghatározás infrastruktúrája
 Népszerűen a műholdas helymeghatározásról és navigációról 2. rész Az idő mérése, karóránk leolvasása, ma mindannyiunk számára természetes tevékenység. De vajon ugyanilyen természetes és szükséges lesz-e
Népszerűen a műholdas helymeghatározásról és navigációról 2. rész Az idő mérése, karóránk leolvasása, ma mindannyiunk számára természetes tevékenység. De vajon ugyanilyen természetes és szükséges lesz-e
Leica Viva GNSS SmartLink technológia. Csábi Zoltán mérnök üzletkötő, Kelet-Magyarország
 Leica Viva GNSS SmartLink technológia Csábi Zoltán mérnök üzletkötő, Kelet-Magyarország Kitoljuk a határokat Leica Viva GNSS technológia Az igazi határ ott van ahol a műszer még éppen működik, illetve
Leica Viva GNSS SmartLink technológia Csábi Zoltán mérnök üzletkötő, Kelet-Magyarország Kitoljuk a határokat Leica Viva GNSS technológia Az igazi határ ott van ahol a műszer még éppen működik, illetve
ALKALMAZOTT TÉRINFORMATIKA 1.
 ALKALMAZOTT TÉRINFORMATIKA 1. FÖLDRAJZ ALAPSZAK (NAPPALI MUNKAREND) TANTÁRGYI KOMMUNIKÁCIÓS DOSSZIÉ MISKOLCI EGYETEM MŰSZAKI FÖLDTUDOMÁNYI KAR FÖLDRAJZ-GEOINFORMATIKA INTÉZET Miskolc, 2018. TARTALOMJEGYZÉK
ALKALMAZOTT TÉRINFORMATIKA 1. FÖLDRAJZ ALAPSZAK (NAPPALI MUNKAREND) TANTÁRGYI KOMMUNIKÁCIÓS DOSSZIÉ MISKOLCI EGYETEM MŰSZAKI FÖLDTUDOMÁNYI KAR FÖLDRAJZ-GEOINFORMATIKA INTÉZET Miskolc, 2018. TARTALOMJEGYZÉK
MIKOVINY SÁMUEL TÉRINFORMATIKAI EMLÉKVERSENY
 FVM VIDÉKFEJLESZTÉSI, KÉPZÉSI ÉS SZAKTANÁCSADÁSI INTÉZET NYUGAT MAGYARORSZÁGI EGYETEM GEOINFORMATIKAI KAR MIKOVINY SÁMUEL TÉRINFORMATIKAI EMLÉKVERSENY 2008/2009. TANÉV Az I. FORDULÓ FELADATAI NÉV:... Tudnivalók
FVM VIDÉKFEJLESZTÉSI, KÉPZÉSI ÉS SZAKTANÁCSADÁSI INTÉZET NYUGAT MAGYARORSZÁGI EGYETEM GEOINFORMATIKAI KAR MIKOVINY SÁMUEL TÉRINFORMATIKAI EMLÉKVERSENY 2008/2009. TANÉV Az I. FORDULÓ FELADATAI NÉV:... Tudnivalók
Érsek Ákos. GPSCOM Kft.
 ASHTECH mobil térinformatikai adatgyűjtők HUNAGI 3.MobilGIS konferencia 2012, Budapest Érsek Ákos 1 GPSCOM Kft. Alaptérkép felvétel a ProMark800 készülékkel Az legújabb GNSS centrikus vevő amely képes
ASHTECH mobil térinformatikai adatgyűjtők HUNAGI 3.MobilGIS konferencia 2012, Budapest Érsek Ákos 1 GPSCOM Kft. Alaptérkép felvétel a ProMark800 készülékkel Az legújabb GNSS centrikus vevő amely képes
Automatikus Fedélzeti Irányító Rendszerek. Navigációs rendszerek a pilóta szemszögéből Tóth Gábor
 Automatikus Fedélzeti Irányító Rendszerek Navigációs rendszerek a pilóta szemszögéből Tóth Gábor VFR Visual Flight Rules A navigáció folyamatos földlátást igényel Minimálisan 5 km látástávolság szükséges
Automatikus Fedélzeti Irányító Rendszerek Navigációs rendszerek a pilóta szemszögéből Tóth Gábor VFR Visual Flight Rules A navigáció folyamatos földlátást igényel Minimálisan 5 km látástávolság szükséges
A műholdas helymeghatározás elve, és gyakorlati alkalmazása
 A műholdas helymeghatározás elve, és gyakorlati alkalmazása 1. GPS a helymeghatározás legkorszerűbb eszköze 2. A GPS mérés elve 3. A jelfeldolgozás alapelvei 4. Helymeghatározási módszerek 5. Milyen pontos
A műholdas helymeghatározás elve, és gyakorlati alkalmazása 1. GPS a helymeghatározás legkorszerűbb eszköze 2. A GPS mérés elve 3. A jelfeldolgozás alapelvei 4. Helymeghatározási módszerek 5. Milyen pontos
Agrár-környezetvédelmi Modul Agrár-környezetvédelem, agrotechnológia. KÖRNYEZETGAZDÁLKODÁSI MÉRNÖKI MSc TERMÉSZETVÉDELMI MÉRNÖKI MSc
 Agrár-környezetvédelmi Modul Agrár-környezetvédelem, agrotechnológia KÖRNYEZETGAZDÁLKODÁSI MÉRNÖKI MSc TERMÉSZETVÉDELMI MÉRNÖKI MSc A művelést segítő szenzorok és monitorok I. 139.lecke Globális helymeghatározás
Agrár-környezetvédelmi Modul Agrár-környezetvédelem, agrotechnológia KÖRNYEZETGAZDÁLKODÁSI MÉRNÖKI MSc TERMÉSZETVÉDELMI MÉRNÖKI MSc A művelést segítő szenzorok és monitorok I. 139.lecke Globális helymeghatározás
Számítógép felépítése
 Alaplap, processzor Számítógép felépítése Az alaplap A számítógép teljesítményét alapvetően a CPU és belső busz sebessége (a belső kommunikáció sebessége), a memória mérete és típusa, a merevlemez sebessége
Alaplap, processzor Számítógép felépítése Az alaplap A számítógép teljesítményét alapvetően a CPU és belső busz sebessége (a belső kommunikáció sebessége), a memória mérete és típusa, a merevlemez sebessége
A navigációs műholdrendszerek fontosabb jellemzői. A műholdas helymeghatározás fejlődéstörténete.
 1. előadás: A navigációs műholdrendszerek fontosabb jellemzői. A műholdas helymeghatározás fejlődéstörténete. 1.1 Bevezetés Napjainkban egyre inkább felértékelődik a helyhez kapcsolt információk szerepe.
1. előadás: A navigációs műholdrendszerek fontosabb jellemzői. A műholdas helymeghatározás fejlődéstörténete. 1.1 Bevezetés Napjainkban egyre inkább felértékelődik a helyhez kapcsolt információk szerepe.
INFORMATIKA ÁGAZATI ALKALMAZÁSAI. Az Agrármérnöki MSc szak tananyagfejlesztése TÁMOP-4.1.2-08/1/A-2009-0010
 INFORMATIKA ÁGAZATI ALKALMAZÁSAI Az Agrármérnöki MSc szak tananyagfejlesztése TÁMOP-4.1.2-08/1/A-2009-0010 13. GNSS mérés tervezése, végrehajtása Tervezés célja, eszközei, almanach GNSS tervező szoftverek
INFORMATIKA ÁGAZATI ALKALMAZÁSAI Az Agrármérnöki MSc szak tananyagfejlesztése TÁMOP-4.1.2-08/1/A-2009-0010 13. GNSS mérés tervezése, végrehajtása Tervezés célja, eszközei, almanach GNSS tervező szoftverek
MIKOVINY SÁMUEL TÉRINFORMATIKAI EMLÉKVERSENY
 NYUGAT-MAGYARORSZÁGI EGYETEM GEOINFORMATIKAI KAR MIKOVINY SÁMUEL TÉRINFORMATIKAI EMLÉKVERSENY 2012/2013. TANÉV Az I. FORDULÓ FELADATAI NÉV:... Tudnivalók A feladatlap 4 feladatból áll, melyeket tetszőleges
NYUGAT-MAGYARORSZÁGI EGYETEM GEOINFORMATIKAI KAR MIKOVINY SÁMUEL TÉRINFORMATIKAI EMLÉKVERSENY 2012/2013. TANÉV Az I. FORDULÓ FELADATAI NÉV:... Tudnivalók A feladatlap 4 feladatból áll, melyeket tetszőleges
Rallyinfo.hu - GPS rendszer működésének technikai leírása V1
 Rallyinfo.hu - GPS rendszer működésének technikai leírása V1 1. ábra: GPS doboz Méretei: 115x90x55mm Súlya: 340g + 2db csőbilincs 110g GPS mérés általános működési elve: A GPS egy fejlett helymeghatározó
Rallyinfo.hu - GPS rendszer működésének technikai leírása V1 1. ábra: GPS doboz Méretei: 115x90x55mm Súlya: 340g + 2db csőbilincs 110g GPS mérés általános működési elve: A GPS egy fejlett helymeghatározó
Miskolci Egyetem Doktori Tanácsa Miskolc. Program: Geotechniaki rendszerek és eljárástechnika Programvezető: Dr. Kovács Ferenc
 Miskolci Egyetem Doktori Tanácsa Miskolc Program: Geotechniaki rendszerek és eljárástechnika Programvezető: Dr. Kovács Ferenc Alprogram: Geotechnikai rendszerek és eljárások kutatása, fejlesztése Részprogram:
Miskolci Egyetem Doktori Tanácsa Miskolc Program: Geotechniaki rendszerek és eljárástechnika Programvezető: Dr. Kovács Ferenc Alprogram: Geotechnikai rendszerek és eljárások kutatása, fejlesztése Részprogram:
CÉLKOORDINÁTOROK alkalmazástechnikája CÉLKOORDINÁTOROK FELÉPÍTÉSI ELVE
 Géczi József Dr. Szabó László CÉLKOORDINÁTOROK alkalmazástechnikája A rádiótechnikai célkoordinátorok (RCK) feladata azon szögkoordináták mérése, amelyek a távolságvektor koordinátor hossztengelyéhez viszonyított
Géczi József Dr. Szabó László CÉLKOORDINÁTOROK alkalmazástechnikája A rádiótechnikai célkoordinátorok (RCK) feladata azon szögkoordináták mérése, amelyek a távolságvektor koordinátor hossztengelyéhez viszonyított
Adatgyűjtés. Kézi technológiák. Adatgyűjtési technológiák. Térbeli adatok jelenségek térbeli elhelyezkedése, kiterjedése, stb.
 Adatgyűjtés Adatgyűjtés Adatgyűjtési és adatnyerési technikák a térinformatikában Térbeli adatok jelenségek térbeli elhelyezkedése, kiterjedése, stb. Leíró (attributum) adatok a térképi objektumokhoz rendelt
Adatgyűjtés Adatgyűjtés Adatgyűjtési és adatnyerési technikák a térinformatikában Térbeli adatok jelenségek térbeli elhelyezkedése, kiterjedése, stb. Leíró (attributum) adatok a térképi objektumokhoz rendelt
Ismerkedjünk tovább a számítógéppel. Alaplap és a processzeor
 Ismerkedjünk tovább a számítógéppel Alaplap és a processzeor Neumann-elvű számítógépek főbb egységei A részek feladatai: Központi egység: Feladata a számítógép vezérlése, és a számítások elvégzése. Operatív
Ismerkedjünk tovább a számítógéppel Alaplap és a processzeor Neumann-elvű számítógépek főbb egységei A részek feladatai: Központi egység: Feladata a számítógép vezérlése, és a számítások elvégzése. Operatív
A jogszabályi változások és a hazai infrastruktúrában történt fejlesztések hatása a GNSS mérésekre
 A jogszabályi változások és a hazai infrastruktúrában történt fejlesztések hatása a GNSS mérésekre Braunmüller Péter Galambos István MFTTT 29. Vándorgyűlés, Sopron 2013. Július 11. Földmérési és Távérzékelési
A jogszabályi változások és a hazai infrastruktúrában történt fejlesztések hatása a GNSS mérésekre Braunmüller Péter Galambos István MFTTT 29. Vándorgyűlés, Sopron 2013. Július 11. Földmérési és Távérzékelési
Óbudai Egyetem Alba Regia Műszaki Kar Szakdolgozat védés 2015. január 2. GNSS technika alkalmazása tervezési alaptérképek készítésekor
 Óbudai Egyetem Alba Regia Műszaki Kar Szakdolgozat védés 2015. január 2. GNSS technika alkalmazása tervezési alaptérképek készítésekor Péter Tamás Földmérő földrendező mérnök BSc. Szak, V. évfolyam Dr.
Óbudai Egyetem Alba Regia Műszaki Kar Szakdolgozat védés 2015. január 2. GNSS technika alkalmazása tervezési alaptérképek készítésekor Péter Tamás Földmérő földrendező mérnök BSc. Szak, V. évfolyam Dr.
2. Elméleti összefoglaló
 2. Elméleti összefoglaló 2.1 A D/A konverterek [1] A D/A konverter feladata, hogy a bemenetére érkező egész számmal arányos analóg feszültséget vagy áramot állítson elő a kimenetén. A működéséhez szükséges
2. Elméleti összefoglaló 2.1 A D/A konverterek [1] A D/A konverter feladata, hogy a bemenetére érkező egész számmal arányos analóg feszültséget vagy áramot állítson elő a kimenetén. A működéséhez szükséges
WLAN lefedettségi terv készítés - Site Survey
 WLAN lefedettségi terv készítés - Site Survey 1. Mérés célja Az ISM és U-NII sávok közkedvelt használata, az egyre dizájnosabb és olcsóbb Wi- Wi képes eszközök megjelenése, dinamikus elterjedésnek indította
WLAN lefedettségi terv készítés - Site Survey 1. Mérés célja Az ISM és U-NII sávok közkedvelt használata, az egyre dizájnosabb és olcsóbb Wi- Wi képes eszközök megjelenése, dinamikus elterjedésnek indította
A GNSS Szolgáltató Központ 2009-ben www.gnssnet.hu. Galambos István FÖMI Kozmikus Geodéziai Obszervatórium
 A GNSS Szolgáltató Központ 2009-ben www.gnssnet.hu Galambos István FÖMI Kozmikus Geodéziai Obszervatórium Tartalom: A FÖMI GNSSnet.hu hálózata 2008 év végén Modernizáció a hálózatban 2009-ben A szolgáltatások
A GNSS Szolgáltató Központ 2009-ben www.gnssnet.hu Galambos István FÖMI Kozmikus Geodéziai Obszervatórium Tartalom: A FÖMI GNSSnet.hu hálózata 2008 év végén Modernizáció a hálózatban 2009-ben A szolgáltatások
Az Internet jövője Internet of Things
 Az Internet jövője Dr. Bakonyi Péter c. docens 2011.01.24. 2 2011.01.24. 3 2011.01.24. 4 2011.01.24. 5 2011.01.24. 6 1 Az ( IoT ) egy világméretű számítógéphálózaton ( Internet ) szabványos protokollok
Az Internet jövője Dr. Bakonyi Péter c. docens 2011.01.24. 2 2011.01.24. 3 2011.01.24. 4 2011.01.24. 5 2011.01.24. 6 1 Az ( IoT ) egy világméretű számítógéphálózaton ( Internet ) szabványos protokollok
Fontos szélességi körök. Északi sarkkör (Ész. 66 30') Ráktérítő (Ész. 23 30') Egyenlítő (0 ) Baktérítő (Dsz. 23 30') Déli sarkkör (Dsz.
 Ráktérítő (Ész. 23 30') Egyenlítő (0 ) Baktérítő (Dsz. 23 30') Déli sarkkör (Dsz.") Tájékozódás Földrajzi szélesség Földrajzi szélesség (φ): A P pont szélességét úgy kapjuk, hogy összekötjük a Föld középpontjával, és az így kapott egyenes és az Egyenlítő síkja által bezárt szög adja
Tájékozódás Földrajzi szélesség Földrajzi szélesség (φ): A P pont szélességét úgy kapjuk, hogy összekötjük a Föld középpontjával, és az így kapott egyenes és az Egyenlítő síkja által bezárt szög adja
Helymeghatározás Nokia N76-1
 Nokia N76-1 2007 Nokia. Minden jog fenntartva. A Nokia, a Nokia Connecting People, az Nseries és az N76 a Nokia Corporation védjegye, illetve bejegyzett védjegye. Az említett egyéb termékek és cégek neve
Nokia N76-1 2007 Nokia. Minden jog fenntartva. A Nokia, a Nokia Connecting People, az Nseries és az N76 a Nokia Corporation védjegye, illetve bejegyzett védjegye. Az említett egyéb termékek és cégek neve
A magyarországi GNSS infrastruktúra harmadik generációja. A globális helymeghatározás várható fejlődése. Az állapot-tér modellezés.
 12. előadás: A magyarországi GNSS infrastruktúra harmadik generációja. A globális helymeghatározás várható fejlődése. Az állapot-tér modellezés. 12.1. A GNSS infrastruktúra harmadik generációja A GNSS
12. előadás: A magyarországi GNSS infrastruktúra harmadik generációja. A globális helymeghatározás várható fejlődése. Az állapot-tér modellezés. 12.1. A GNSS infrastruktúra harmadik generációja A GNSS
Agrár-környezetvédelmi Modul Agrár-környezetvédelem, agrotechnológia. KÖRNYEZETGAZDÁLKODÁSI MÉRNÖKI MSc TERMÉSZETVÉDELMI MÉRNÖKI MSc
 Agrár-környezetvédelmi Modul Agrár-környezetvédelem, agrotechnológia KÖRNYEZETGAZDÁLKODÁSI MÉRNÖKI MSc TERMÉSZETVÉDELMI MÉRNÖKI MSc Precíziós mezőgazdaság információ technológiai alapjai I. 137.lecke Globális
Agrár-környezetvédelmi Modul Agrár-környezetvédelem, agrotechnológia KÖRNYEZETGAZDÁLKODÁSI MÉRNÖKI MSc TERMÉSZETVÉDELMI MÉRNÖKI MSc Precíziós mezőgazdaság információ technológiai alapjai I. 137.lecke Globális
Koordinátarendszerek, dátumok, GPS
 Koordinátarendszerek, dátumok, GPS KOORDINÁTARENDSZEREK A SPATIAL-BEN Koordinátarendszer típusok 1. Descartes-féle koordinátarendszer: egy adott pontból (origó) kiinduló, egymásra merőleges egyenesek alkotják,
Koordinátarendszerek, dátumok, GPS KOORDINÁTARENDSZEREK A SPATIAL-BEN Koordinátarendszer típusok 1. Descartes-féle koordinátarendszer: egy adott pontból (origó) kiinduló, egymásra merőleges egyenesek alkotják,
RFID rendszer felépítése
 RFID és RTLS RFID rendszer felépítése 1. Tag-ek (transzponder) 2. Olvasók (interrogátor) 3. Számítógépes infrastruktúra 4. Szoftverek Tárgyak, élőlények, helyszínek azonosítása, követése és menedzsmentje
RFID és RTLS RFID rendszer felépítése 1. Tag-ek (transzponder) 2. Olvasók (interrogátor) 3. Számítógépes infrastruktúra 4. Szoftverek Tárgyak, élőlények, helyszínek azonosítása, követése és menedzsmentje
Mőholdas helymeghatározás
 Mőholdas helymeghatározás Szatmári József Szegedi Tudományegyetem Természeti Földrajzi és Geoinformatikai Tanszék Tájékozódás a Földön Global Positioning System: a nagy ötlet Néhány alaptétel GPS vevık
Mőholdas helymeghatározás Szatmári József Szegedi Tudományegyetem Természeti Földrajzi és Geoinformatikai Tanszék Tájékozódás a Földön Global Positioning System: a nagy ötlet Néhány alaptétel GPS vevık
A GIPSY/OASIS szoftverről
 A GIPSY/OASIS szoftverről Horváth Tivadar földmérő mérnök TEA előadás 2014.09.23., Penc Tartalomjegyzék A GIPSY/OASIS szoftver Feldolgozás menete GIPSY kurzus beszámoló, Covilhã, Portugália GIPSY/OASIS
A GIPSY/OASIS szoftverről Horváth Tivadar földmérő mérnök TEA előadás 2014.09.23., Penc Tartalomjegyzék A GIPSY/OASIS szoftver Feldolgozás menete GIPSY kurzus beszámoló, Covilhã, Portugália GIPSY/OASIS
Bluetooth és a GPS technológia bemutatása. Készítette: Szentesi Szabolcs Neptun kód: DUOQTK
 Bluetooth és a GPS technológia bemutatása Készítette: Szentesi Szabolcs Neptun kód: DUOQTK Mi is valójában a Bluetooth? Történelmi áttekintés X. század : Dán Viking kékfog Harald király egyesítette Dániát
Bluetooth és a GPS technológia bemutatása Készítette: Szentesi Szabolcs Neptun kód: DUOQTK Mi is valójában a Bluetooth? Történelmi áttekintés X. század : Dán Viking kékfog Harald király egyesítette Dániát
Magellan térinformatikai GPS vevők GIS OPEN konferencia 2007 Székesfehérvár Érsek Ákos, Guards Zrt.
 Magellan térinformatikai GPS vevők GIS OPEN konferencia 2007 Székesfehérvár Érsek Ákos, Guards Zrt. Vezető gyártó a GNSS navigációban és helymeghatározásban 1 Fedezze fel a Magellan-t 2006. Augusztus 31.-én
Magellan térinformatikai GPS vevők GIS OPEN konferencia 2007 Székesfehérvár Érsek Ákos, Guards Zrt. Vezető gyártó a GNSS navigációban és helymeghatározásban 1 Fedezze fel a Magellan-t 2006. Augusztus 31.-én
elektronikus adattárolást memóriacím
 MEMÓRIA Feladata A memória elektronikus adattárolást valósít meg. A számítógép csak olyan műveletek elvégzésére és csak olyan adatok feldolgozására képes, melyek a memóriájában vannak. Az információ tárolása
MEMÓRIA Feladata A memória elektronikus adattárolást valósít meg. A számítógép csak olyan műveletek elvégzésére és csak olyan adatok feldolgozására képes, melyek a memóriájában vannak. Az információ tárolása
Térinformatikai DGPS NTRIP vétel és feldolgozás
 Térinformatikai DGPS NTRIP vétel és feldolgozás Méréseinkhez a Thales Mobile Mapper CE térinformatikai GPS vevıt használtunk. A mérést a Szegedi Tudományegyetem Egyetem utcai épületének tetején található
Térinformatikai DGPS NTRIP vétel és feldolgozás Méréseinkhez a Thales Mobile Mapper CE térinformatikai GPS vevıt használtunk. A mérést a Szegedi Tudományegyetem Egyetem utcai épületének tetején található
MUNKAANYAG. Heilmann János. Globális helymeghatározó rendszerrel történő vízszintes alappontsűrítés. A követelménymodul megnevezése:
 Heilmann János Globális helymeghatározó rendszerrel történő vízszintes alappontsűrítés A követelménymodul megnevezése: Alappontsűrítés és terepi adatgyűjtés feladatai A követelménymodul száma: 2246-06
Heilmann János Globális helymeghatározó rendszerrel történő vízszintes alappontsűrítés A követelménymodul megnevezése: Alappontsűrítés és terepi adatgyűjtés feladatai A követelménymodul száma: 2246-06
FÖLDMÉRÉS ISMERETEK EMELT SZINTŰ ÍRÁSBELI VIZSGA JAVÍTÁSI-ÉRTÉKELÉSI ÚTMUTATÓ A MINTAFELADATOKHOZ
 FÖLDMÉRÉS ISMERETEK EMELT SZINTŰ ÍRÁSBELI VIZSGA JAVÍTÁSI-ÉRTÉKELÉSI ÚTMUTATÓ A MINTAFELADATOKHOZ 1 / 6 feladatlap Elméleti szöveges feladatok 1. Egészítse ki az alábbi szöveget a Glonassz GNSS alaprendszerrel
FÖLDMÉRÉS ISMERETEK EMELT SZINTŰ ÍRÁSBELI VIZSGA JAVÍTÁSI-ÉRTÉKELÉSI ÚTMUTATÓ A MINTAFELADATOKHOZ 1 / 6 feladatlap Elméleti szöveges feladatok 1. Egészítse ki az alábbi szöveget a Glonassz GNSS alaprendszerrel
ProMark 800. Teljes GNSS produktivitás Október, 2011
 ProMark 800 Teljes GNSS produktivitás Október, 2011 Mi is a ProMark 800? Egy hatékony RTK rendszerű vevőkészülék, melypontos GNSS helymeghatározást tesz lehetővé okos, terepálló, vezeték nélküli és flexibilis
ProMark 800 Teljes GNSS produktivitás Október, 2011 Mi is a ProMark 800? Egy hatékony RTK rendszerű vevőkészülék, melypontos GNSS helymeghatározást tesz lehetővé okos, terepálló, vezeték nélküli és flexibilis
Sokkia gyártmányú RTK GPS rendszer
 Sokkia gyártmányú RTK GPS rendszer A leírást készítette: Deákvári József, intézeti mérnök Az FVM Mezőgazdasági Gépesítési Intézet 2005-ben újabb műszerekkel gyarapodott. Beszerzésre került egy Sokkia gyártmányú
Sokkia gyártmányú RTK GPS rendszer A leírást készítette: Deákvári József, intézeti mérnök Az FVM Mezőgazdasági Gépesítési Intézet 2005-ben újabb műszerekkel gyarapodott. Beszerzésre került egy Sokkia gyártmányú
A GNSS navigációs szoftverek térképi jelkulcsa
 A GNSS navigációs szoftverek térképi jelkulcsa - különös tekintettel az autós navigációs szoftverek térképi jelkulcsára - Diplomamunka Témavezető: Kovács Béla, tanársegéd Eötvös Loránd Tudományegyetem
A GNSS navigációs szoftverek térképi jelkulcsa - különös tekintettel az autós navigációs szoftverek térképi jelkulcsára - Diplomamunka Témavezető: Kovács Béla, tanársegéd Eötvös Loránd Tudományegyetem
Új szolgáltatási képességek I.: földrajzi hely alapú szolgáltatások
 Budapesti Műszaki és Gazdaságtudományi Egyetem Villamosmérnöki és Informatikai Kar Mérnök informatikus szak, mesterképzés Hírközlő rendszerek biztonsága szakirány Villamosmérnöki szak, mesterképzés - Újgenerációs
Budapesti Műszaki és Gazdaságtudományi Egyetem Villamosmérnöki és Informatikai Kar Mérnök informatikus szak, mesterképzés Hírközlő rendszerek biztonsága szakirány Villamosmérnöki szak, mesterképzés - Újgenerációs
Legújabb technológiai fejlesztések a Leica Geosystems-től
 Legújabb technológiai fejlesztések a Leica Geosystems-től 2018. március 13. GISopen 2018 Székesfehérvár Adatok távolból, geoinformatika közelről Zeke Zsolt Mérnök üzletkötő Leica újdonságok 2018 A világ
Legújabb technológiai fejlesztések a Leica Geosystems-től 2018. március 13. GISopen 2018 Székesfehérvár Adatok távolból, geoinformatika közelről Zeke Zsolt Mérnök üzletkötő Leica újdonságok 2018 A világ
Terepi adatgyűjtés mobil eszközökkel a természetvédelemben
 T E R M É S Z E T V É D E L E M Terepi adatgyűjtés mobil eszközökkel a természetvédelemben Dr. Takács András Attila Takács Gábor Biró Csaba Tartalom Bevezetés háttér információk GPS Természetvédelmi feladatok
T E R M É S Z E T V É D E L E M Terepi adatgyűjtés mobil eszközökkel a természetvédelemben Dr. Takács András Attila Takács Gábor Biró Csaba Tartalom Bevezetés háttér információk GPS Természetvédelmi feladatok
HÍRKÖZLÉSTECHNIKA. 3. és 4. ea. Dr.Varga Péter János
 HÍRKÖZLÉSTECHNIKA 3. és 4. ea Dr.Varga Péter János Mi az a WLAN? 2 A WLAN az angol Wireless Local Area Network szó rövidítése, melynek jelentése vezeték nélküli helyi hálózat, amit leginkább a vezeték
HÍRKÖZLÉSTECHNIKA 3. és 4. ea Dr.Varga Péter János Mi az a WLAN? 2 A WLAN az angol Wireless Local Area Network szó rövidítése, melynek jelentése vezeték nélküli helyi hálózat, amit leginkább a vezeték
Intelligens Rendszerek GPS
 Intelligens Rendszerek GPS A helymeghatározás célja térképezés, pontosabb, részletesebb térképek készítése, hagyományos térképek pontosítása, földmérés, navigáció, hajózás, repülés, túrázás, gépkocsi navigáció.
Intelligens Rendszerek GPS A helymeghatározás célja térképezés, pontosabb, részletesebb térképek készítése, hagyományos térképek pontosítása, földmérés, navigáció, hajózás, repülés, túrázás, gépkocsi navigáció.
Csatlakozási állapot megjelenítése
 Csatlakozási állapot megjelenítése Ellenőrizheti a vevő és a jármű között a csatlakozás állapotát. Ezek a kapcsolatok felelősek az olyan információkért, mint a GPS információ és a parkolási jelzések. 1
Csatlakozási állapot megjelenítése Ellenőrizheti a vevő és a jármű között a csatlakozás állapotát. Ezek a kapcsolatok felelősek az olyan információkért, mint a GPS információ és a parkolási jelzések. 1
Topcon Elit Mérőrenszer
 Topcon Elit Mérőrenszer Salgótarján, 2017. május 04. Navicom Plusz Bt. GT Robot Mérőállomás A VILÁG egyik LEGGYORSABB LEGKISEBB LEGKÖNNYEBB Robot mérőállomása. HiPer HR GNSS vevő KICSI, KÖNNYŰ, KOMPAKT
Topcon Elit Mérőrenszer Salgótarján, 2017. május 04. Navicom Plusz Bt. GT Robot Mérőállomás A VILÁG egyik LEGGYORSABB LEGKISEBB LEGKÖNNYEBB Robot mérőállomása. HiPer HR GNSS vevő KICSI, KÖNNYŰ, KOMPAKT