Intelligens Rendszerek GPS
|
|
|
- Fanni Pap
- 9 évvel ezelőtt
- Látták:
Átírás
1 Intelligens Rendszerek GPS
2 A helymeghatározás célja térképezés, pontosabb, részletesebb térképek készítése, hagyományos térképek pontosítása, földmérés, navigáció, hajózás, repülés, túrázás, gépkocsi navigáció.

3 Néhány GPS készülék Garmin etrex Vista Magellan Meridian Color Eagle The AssuMap 12 Garmin etrex Vista Magellan Meridian Color Eagle The AssuMap 12 Number of parallel channels Acquisition times (cold/warm) 15 s./45 s. 2 s./15 s. 2 s./15 s. Update rate 1 s. 1 s. 1 s. Position finding accuracy (root mean - square deflection) 15 m. 10 m. 15 m. Interfaces RS-232 NMEA RS-232 NMEA RS-232 NMEA Internal memory 24 Mb. Up to Mb. Up to Way poits

4 Néhány GPS készülék Garmin GPS 128 receiver Magellan NAV 6500 Number of channels Warm acquisition time (in seconds) Cold acquisition time (in seconds) Interface Way points Number of tracks (and nubmer of points in track) Display Garmin GPS RS232 with NMEA (1024) 64 х 100 Magellan NAV NMEA 0183 (out) V. 1.5 & (2000) 320x240
 64 х 100 Magellan NAV 6500 10 15 45 NMEA 0183 (out) V. 1.5 & 2.")
5 Néhány GPS készülék Casio PROTREK PRT-2GP Benefon ESC! Garmin GPS 155 XL. Garmin GPS 35.

6 A GPS rendszer célja A hely meghatározás gyorsítása, pontosítása, egyszerűsítése, időjárási viszonyoktól függetlenné tétele. A GPS rendszer a helymeghatározás terén egy alapjaiban új paradigmát jelent! Kezdeti feladata katonai jellegű volt. Kifejlesztését az Amerikai Védelmi Hivatal kezdeményezte. Napjainkra a rendszer bárki számára hozzáférhető.

7 Helymeghatározás hagyományos A hagyományos helymeghatározás alapeszközei: Iránytű, Szextáns (speciális szögmérő), térkép, óra. módszerei
, térkép, óra.")
8 Fejlettebb hely meghatározási Világító torony. Rádió navigáció ILS (Instrument Landing System), VOR (VHF Omnidirectional Range), DME (Distance Measuring Equippement). módszerek Észak
.")
9 GPS műholdak: Név: NAVSTAR Gyártó: Rockwell International Távolság: km Súly: 862 kg (az űrben mérve) Méret: 5,2 m nyitott napelemekkel Keringési idő: 12 óra Orbitális sík: 55 fok az egyenlítő síkjához Tervezett élettartam: 7.5 év A jelenlegi kialakítás: 24 Block II gyártmányú műhold A jövő műholdjai: 21 Block II Martin Marietta által fejlesztendő. Földi állomások (nevezzük "Kontrol Szegmensnek" is) Ezek az állomások nyomon követik a GPS műholdakat, vizsgálják működőképességüket és pontos pozíciójukat az űrben. A fő földi állomás feladja a műholdra a pályaadat korrekciókat, valamint az óra összeadóállandóját. A műhold azután beépíti a GPS vevők felé sugárzott jelekbe ezeket az adatmódosításokat. Öt földi követő állomás van a következő helyeken: Hawaii, Ascension Island, Diego Garcia, Kwajalein és Colorado Springs. A GPS rendszer
 Ezek az állomások nyomon követik a GPS műholdakat, vizsgálják működőképességüket és pontos pozíciójukat az űrben.")
10 Holdak azonosítása Pszeudo Random jel
11 A GPS mérés alapja A GPS alapja a műholdas háromszögelés. Háromszögelés 1. A háromszögelés szót nagyon pongyolán használjuk itt, mivel tudjuk a GPS nem szögméréssel határozza meg a háromszög oldalait, hanem a háromszög oldalainak távolságát határozza meg, tehát trilaterációval, de ha csak a műhold-földi pont távolságokat mérjük, ívmetszéssel. 2. A háromszög megoldása érdekében a GPS vevő távolságot mér, a rádiójel futási ideje alapján. 3. A futási idő méréséhez a GPS-nek nagyon pontos időmérésre van szüksége, amit nagyon sok trükkel lehet véghez vinni. 4. A távolságon kívül nagyon pontosan kell tudni, hogy a GPS műhold hol helyezkedik el a világűrben. Nagy sugarú pálya és gondos észlelés a titok. 5. Végezetül minden az atmoszférán áthaladó jel késleltetését korrigálni kell.

12 Geometriai alapok 1 A földi helymeghatározás geometriai alapja: Tegyük fel, hogy egy olyan műholdtól mérjük a távolságunkat, mely km-re van Tudva, hogy mi km-re állunk egy magányos műholdtól, biztosak abban lehetünk, hogy valahol a világmindenségben egy olyan gömbön helyezkedünk el, mely sugara km, és középpontja a műhold. Keressünk egy másik műholdat, amelytől a távolságunkat km-nek mértük. Most már nem mondhatjuk, hogy egy gömbön állunk. Tudjuk azt is, hogy egy másik gömbön is állunk, mely sugara km, és középpontja a másik műhold. Más szavakkal, a helyzetünk most a két gömb áthatásán egy körön található.

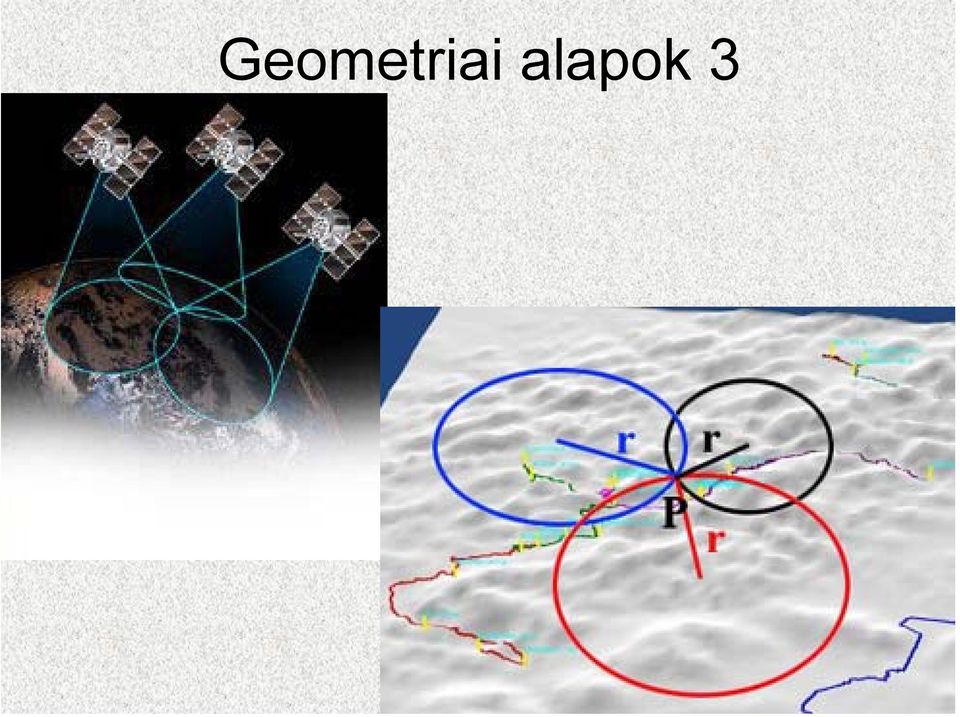
13 Geometriai alapok 2 Ha most egy harmadik műholdtól is megmérjük a távolságunkat, és az km-re adódik, akkor belátható, hogy három gömb áthatásába kerültünk, melyben az egyik műholdtól , a másodiktól , a harmadiktól km-re vagyunk. Két pont valamelyikén találjuk magunkat. Így három műhold távolsága alapján eljutottunk tartózkodási helyünk két legvalószínűbb pontjához. Annak eldöntése, hogy a két pont közül melyiken is állunk, egy negyedik műholdra való mérés feladata. legtöbbször képtelen az egyik megoldás, mert túl messze esne a pont helyzete a földtől. Emiatt sok esetben negyedik mérés nélkül is eldönthető a kérdés.

14 Geometriai alapok 3
15 Távolságmérés 1 A működés alapfeltétele, hogy: a műholdak és a vevő órája rendkívül pontos (a műholdakon atomóra van), a vevő órája szinkronban van a műholdak órájával A GPS esetében olyan rádiójelet mérünk mely sebessége kereken A probléma a futási idő mérése. Szinkronizáljuk óráinkat Az időmérés problémája meglehetősen bonyolult. az első probléma az, hogy a mérendő idő rendkívül rövid. Ha a műhold éppen a fejünk felett van, a futási idő nem több, mint 0,06 másodperc. Ezért nagyon pontos órára lenne szükségünk. Majd erről is szólunk nemsokára. Tegyük fel, hogy van ilyen pontos óránk, hogyan mérjük a futási időt? Ennek magyarázatára álljon itt a következő hasonlat:

16 Távolságmérés magyarázat Tegyük fel, hogy a műholdon is, a vevőn is pontosan délben elkezdjük lejátszani a harangszót. Ha a vevőnél állunk, és a hang elér minket a műholdról is, két verziót hallunk, egyet a műholdról, egyet a vevőtől. A kettő nincs szinkronban. A műholdról érkező változat egy kicsit késik, mivel meg kellett tennie több mint km-t. (Ezt a kísérletet kipróbálhatja bárki, aki egyéni műholdvevővel tudja fogni a Duna Televíziót. A hangcsatorna átállításával fogható a műholdról a Kossuth Rádió. Délben kapcsoljunk a Kossuth Rádióra a műholdvevőn, és kapcsoljunk be egy rádiókészüléket, mely a középhullámon fogja a Kossuth Rádió. A késleltetés nagyon jól hallható.)

17 Távolságmérés 2 Ha a késleltetés mértékét meg akarjuk határozni, kapcsoljuk a vevőt olyan késleltetett üzemmódba, amikor a két hang szinkronba kerül. A késleltetés mértéke megegyezik a műholdról érkező jel futási idejével. Most már csak meg kell szorozni a terjedési sebességgel ezt az időt, és megkaptuk a műhold távolságát. Ez az alapja a GPS működésének. A déli harangszó helyett a műhold és a vevő mást használ, az ál-véletlen kódot (pseudo random code).

18 A legfontosabb GPS jelek Vivőhullám A GPS műholdak két különböző vivőfrekvencián közvetítenek jeleket. Az L1 vivőhullám Mhz-es és viszi a helyzeti üzeneteket és az ál-véletlen kódot az időmeghatározáshoz. Az L2 vivőhullám Mhz-es, és a sokkal pontosabb katonai ál-véletlen kódot használja. Az ál-véletlen kódok Az ál-véletlen kódok két típusát alkalmazzuk. Az első a durván nyert kód (C/A Coarse Acquisition) Az vivőhullámot modulálja bitenként ismétlődik. Minden műholdnak saját ál-véletlen kódja van, így a kibocsátó műholdak egyértelműen azonosíthatók. A C/A kód a polgári GPS alapja. A második ál-véletlen kód a P (precise) kód. Ez a kód 266,4 naponként ismétli önmagát. A műholdak azonosítását az teszi lehetővé, hogy minden esetben egyedi a kód.
 kód.")
19 A legfontosabb GPS jelek 1 Vivőhullám A GPS műholdak két különböző vivőfrekvencián közvetítenek jeleket. Az L1 vivőhullám Mhz-es és viszi a helyzeti üzeneteket és az álvéletlen kódot az időmeghatározáshoz. Az L2 vivőhullám Mhz-es, és a sokkal pontosabb katonai álvéletlen kódot használja. Az ál-véletlen kódok Az ál-véletlen kódok két típusát alkalmazzuk. Az első a durván nyert kód (C/A Coarse Acquisition) Az vivőhullámot modulálja bitenként ismétlődik. Minden műholdnak saját ál-véletlen kódja van, így a kibocsátó műholdak egyértelműen azonosíthatók. A C/A kód a polgári GPS alapja. A második ál-véletlen kód a P (precise) kód. Ez a kód 266,4 naponként ismétli önmagát. A műholdak azonosítását az teszi lehetővé, hogy minden esetben egyedi a kód. A 266,4 napos ciklusú P kód egy-egy hétnapos darabját rendelték hozzá minden egyes műholdhoz. A kód generálása minden vasárnap éjfélkor, a GPS-hét kezdetekor újra indul. Ez a kód modulálja mindkét vivőfrekvenciát, L1-et és L2-t egyaránt. Ezt a kódot a katonai felhasználóknak szánták, ezért titkosítják. A P kód titkosított változatát hívjuk Y kódnak. Amióta a P kód sokkal bonyolultabb, mint a C/A, ezt a vevők sokkal nehezebben érik el. A katonai vevők is először a C/A kódot érik el, utána ugranak a P kódra.
 kód.")
20 A legfontosabb GPS jelek 2 A komplex eljárás segít abban, hogy a vevő mérés közben nehogy más műhold jelére szinkronizálódjék. Nagyon ritkán előforduló véletlen kell ahhoz, hogy egy másik jel is éppen ugyanabban a fázisban ugyanolyan formát mutasson Amióta minden GPS műholdnak saját ál-véletlen kódja van, ez a módszer garantálja, nehogy a vevő véletlenszerűen ráálljon egy másik műhold jelére. Így az összes műhold használhatja ugyanazt a frekvenciát annak veszélye nélkül, hogy egymás adását zavarnák. Titkosított GPS Mivel a GPS-t az amerikai Nemzetvédelmi Minisztérium fejlesztette ki elsősorban hadi alkalmazásokra. Bár becslések szerint a GPS-t ma már háromszor annyi civil vevő használja, mint katonai, a rendszer mégis elsősorban katonai elsőbbséget kell, hogy élvezzen. Végezetül a katonák fenntartják maguknak a különleges bemenetet a sokkal pontosabb P kódra. Ennek frekvenciája a polgári C/A kód frekvenciájának 10-szerese (tehát potenciálisan ennyiszer pontosabb), és sokkal ellenállóbb a zavarokkal szemben. Ha titkosították, a neve Y kód, és csak katonai vevők tudják fogni a megfelelő kulcs ismeretében. Van más oka is az ál-véletlen kód komplexitásának, a döntő ok a GPS gazdaságossága felé. A kódok lehetővé teszik a GPS jelek erősítését. Az ál-véletlen kód használata erősítőként Az ál-véletlen kód egyike a legötletesebb dolgoknak a GPS kapcsán. Ez nemcsak egy hatalmas időmérő jel, hanem lehetővé teszi a nagyon erőtlen műholdjelek erősítését is!

21 Időmérés, óraszinkronizálás 1 Az órahiba kiejtése Egy plusz műhold távolságának mérése és egy kis algebra segítségével a GPS vevő ki tudja ejteni az órahiba döntő hányadát. Inkább egy kis rajzzal, mint az algebrával való bolondítás árán kellene megmagyarázni a működési elvet. Egy kicsit könnyebben lesz érthető a dolog, ha először csak két dimenzióban nézzük a dolgot. Természetesen a GPS három dimenziós rendszer, de az ötlet két dimenzióban is jól bemutatható. A harmadik dimenzióhoz eggyel több mérést kell végezni. Most, amikor egy műhold méréséről beszélünk távolsági értelemben, tudván, hogy ez idő alapján számítható, tehát beszélhetünk nyugodtan időmérésről is.
22 Időmérés, óraszinkronizálás 2 Mondjuk, valójában a helyzetünk 4 másodpercre esik A műholdtól, és 6 másodpercre B műholdtól. Ez a két időtávolság két körívként keresztezi egymást, és a metszéspont a mi helyünk (még csak 2 D-ben gondolkozunk). X-ben állunk ténylegesen (ezt mutatná a vevőnk is, ha az órája pontos lenne), de az óra késik 1 másodpercet a világidőhöz képest. Ezért a vevő az A műholdtól 5 másodpercet mér 4 helyett, a B műholdtól pedig 7 másodpercet 6 helyett. A két kör metszéspontja tehát más, XX helyzetbe került. Így az X és XX helyek közötti eltérés a pontatlan óránknak köszönhető.
23 Időmérés, óraszinkronizálás 3 Ez az a pont, ahol egy geometriai trükkel segíthetünk. Végezzünk mérést egy harmadik műholdra is. Először nézzük meg a hibátlan helyzetet: Minden mérés köríve áthalad X-en, ami helyen helyzetünkön. Sajnos az 1 másodperces órahibánk újabb helymeghatározási problémákat jelent: A vastag vonallal húzott körívek mutatják az ál-mérés esetét, amit az órahiba okoz. Ez az "ál" (pszeudo) kifejezés a GPS-ben azt jelenti, hogy a mérést hiba terheli.
24 Időmérés, óraszinkronizálás 4 Pszeudo-mérés A pszeudo-mérés egy nagyon gyakori varázsszó GPS-es körökben. Azt jelenti, hogy a mérés még nem teljesen redukált órahibával, stb. Jegyezzük meg, hogy amíg az A és B műhold pszeudotávolságai egy pontot metszenek ki, XX-et, a C pszeudotávolsága nem tud átmenni ezen a ponton. Ez a különbség a vevők számítógépeinek köszönhető, mivel ott az órahiba. Mivel az órahiba vagy összeadóállandó minden mérést befolyásol, a számítógép olyan egyszerű korrekciót keres, mellyel eléri, hogy az összes mérési eredmény egy pontot metsszen ki. Egy ilyen korrekció meghatározza azt is, hogy a vevő ezután minden mérésre ezt a korrekciót alkalmazza. Ettől kezdve az óra szinkronban lesz a világidővel. Természetesen ezt a korrekciós eljárást állandóan ismételni kell, hogy állandóan biztosak lehessünk abban, hogy a vevő órája szinkronban maradt.
25 A műholdak pontos pályaadatai 1 Hogyan tudjuk meg pontosan, hogy hol vannak? Ezek mind mintegy km magasan repülnek az űrben. Az a tény, hogy a műholdak ilyen magasan repülnek, előnyös, mert nem zavarja az atmoszféra. Az orbitális pálya elemei is lényegesen könnyebben számíthatók. A légierő minden GPS műholdnak nagyon pontos pályát tűzött ki, kapcsolódva a GPS vezértervhez. GPS vezérterv márciusban a 24. Block II. műhold pályára állításával teljessé vált a GPS műholdak rendszere. Négy további műhold készenlétben áll, hogy szükség esetén fel lehessen bocsátani. Egymáshoz viszonyított helyzetük olyan, hogy a föld bármely pontjáról mindig öt műhold egyszerre látható legyen. Minden vevőkészülékbe be van programozva egy almanach, amely pillanatról-pillanatra megmondja, melyik műhold éppen hol tartózkodik az űrben.
26 A műholdak pontos pályaadatai
27 Miután a Nemzetvédelmi Minisztérium megmérte a műhold pontos helyzetét, felküldi az információt a műholdra. Ezután az időjelben megjelennek a pozícióra vonatkozó információk is. Így egy GPS jel több, mint egy ál-véletlen kód. navigációs üzenetet is tartalmaz pályahiba információkkal. Mielőtt azt hinnénk, hogy azzal, hogy ismerjük a műhold pontos helyzetét, és pontosan tudunk időt mérni, már megoldottunk minden problémát, nézzük meg a következő fejezetet is. A műholdak pontos pályaadatai 2 A folyamatos figyelés pontosítja ezen értékeket A műhold alap-pályája elég egyértelműen megadott, de a műholdat ért külső hatások miatt a pályaelemek kismértékben változnak. Ezeknek a változásoknak a pontos ismerete a folyamatos követés feladata. Ezt a Nemzetvédelmi Minisztérium biztosítja a földi állomások révén. Ezeken nagyon precíz radarberendezések vizsgálják minden műhold pontos altitúdóját, helyzetét, sebességét. Ezek a vizsgált hibák a pályahibák. Ezek a pályahibák a hold és a nap gravitációs hatásváltozásából, valamint a napszél műholdra ható nyomásából erednek. Ezek a hibák elég kicsik, de ha nagy pontosságot szeretnénk elérni, számolni kell velük.
28 Felhasználótól független hibák 1 Ionoszféra Az ionoszféra az atmoszféra jelentős rétege, a föld légkörének 50-től 500 km-ig terjedő része. Nagyészt ionizált részecskékből áll, melyek a GPS jelre zavaró hatást fejtenek ki. A változó elektrontartalom miatt a rádióhullámoknak az optikában használatos törését okozza. Mivel a hibák nagyobb része az ionoszférában keletkezik, jó lenne matematikailag modellek segítségével eltávolítani őket ismervén a hibaforrások egyik legjelentősebb forrását.
29 Felhasználótól független hibák 2 Troposzféra A troposzféra a föld légkörének alsó mintegy 51 km-es vékonyabb rétege, elektromosan semleges, telített vízgőzzel, hőmérséklete és légnyomása változó. Viszonylag kisebb hibát okoz. Vannak egyszerűbb útjai a hibák minimumra csökkentésének. Meg tudjuk jósolni, milyen tipikus hiba jelentkezik egy tipikus napon. Ezt modellezésnek hívjuk, és sokat segít, bár a légkori feltételek ritkán egyértelműen tipikusak
30 Felhasználótól független hibák 3 Hibák modellezése A jel útjának késleltetése az atmoszférán keresztül többnyire jósolható. Az atmoszféra matematikai modelljei számolnak a töltött részecskék hatásával, és a troposzféra gáznemű összetevőivel egyaránt. Mindezek alapján műhold folyamatosan továbbítja az ionoszférikus modell tényleges összetevőit. A GPS vevőnek figyelembe kell venni, hogy a jel milyen szög alatt lépett be az atmoszférába, mert a belépési szög meghatározza a zavaró közegben megtett út hosszát. Másrészt az atmoszféra okozta hibák kezelésének lehetőségét biztosítja két jel sebességének összehasonlítása. A kétfrekvenciás mérés azonban csak fejlettebb készülékeken lehetséges.
31 Felhasználótól független hibák 4 Kétfrekvenciás mérés Ha egy fény áthalad egy közegen, az alacsony frekvenciájú jelek megtörnek, vagy jobban lassulnak mint a magasabb frekvenciájúak. A jelek sebességének csökkenése lehetőséget ad arra, hogy a GPS jelek két különböző vivőfrekvenciáját L1-et, és L2-őt összehasonlítsuk, következtessünk arra, milyen a közeg (atmoszféra), és javításokat tudunk számítani. Mivel a katonai vevők tudnak vivőfrekvencián mérni, a polgáriak nem, némi csalásokat kell a stratégiában alkalmazni.
32 Felhasználótól független hibák 5 Terjedési hibák a föld felszínén A GPS jelek számára a zavaró hatások nem szűnnek mag, miután elérték a föld felszínét. A jel visszaverődhet különböző akadályokon, mielőtt a vevőhöz érne. Ezt többutas terjedésnek nevezik, és hasonló a televíziókból ismert szellemképhez.
33 Felhasználótól független hibák 6 A többutas terjedés A GPS alapkoncepciója feltételezi, hogy a jel a műholdtól a vevőig egyenes vonal mentén terjed. Szerencsétlen módon ez nem teljesen igaz. A jel mindenféléről visszaverődik a környezetünkben, majd ugyanúgy a vevőre jut, mint egy egyenesen érkező jel. Eredményül többféle jel érkezik a vevőre: először a közvetlen, később a környezeti tárgyakról visszaverődött. Ha a környezetből visszaverődött jelek még elég erősek, megtévesztheti a vevőt, és hibás mérést okoz. Vannak olyan vevők, amelyek ki tudják választani azt a jelet, amelyik korábban érkezett (amelyik a közvetlen).
34 Felhasználótól független hibák 7 Pályahibák A pályaadatokat folyamatosan közvetítik a műholdak. A vevők tartalmaznak egy almanachot, mely az összes műhold pályaadatát tartalmazza, és új adat érkezésekor ezeket módosítják. A tipikus pályahibákat óránként javítják. Milyen szög alatt érkeznek a jelek? Az alapvető geometria képes megsokszorozni az előbb említett hibákat. Ennek neve a pontosság geometriai felhígulása "Geometric Dilution of Precision" vagy GDOP.
35 Felhasználótól független hibák 8 Bonyolultnak tűnik, bár elég könnyen belátható. Általában több műholdra van szükség a helymeghatározáshoz. A vevő automatikusan kiválaszt néhányat, a többit elutasítja. Ha a vevő egymáshoz közeli műholdakat választ ki, a metszőkörök, melyek meghatározzák az álláspontunkat, nagyon lapos szögben metszik egymást. Ez azt jelenti, hogy az ábrán a sötét zónában bárhol lehetünk. Ha a vevő egymástól távoli műholdakat választ ki, a körök jól metszik egymást, derékszögű metszésnél a legkisebb a hibaterület. Jó vevők a kiválasztásnál "gondolnak" a GDOP hibára is.
36 Szándékos zavarás (SA) 1 Szándékos hibák! Az elvet "Szelektív hozzáférés"-nek (SA = Selective Availability) nevezzük, és azért vezették be, nehogy ellenséges erők, vagy terrorista csoportok használhassák a GPS-t. Szelektív hozzáférés 1996-ban úgy döntött az Egyesült Államok kormánya, hogy 2000-ben felülvizsgálja a szelektív hozzáférés szükségességét. Alapvetően a Nemzetvédelmi Minisztérium egy bizonyos algoritmus szerint elrontja a műholdak idő- és pályainformációit. Ez az egyetlen vevővel dolgozó felhasználókat érinti hátrányosan, mivel a pálya- és időhiba pozícióhibaként jelenik meg. Ezek az összetevők együttesen a SA-t a legnagyobb hibaforrássá teszik a rendszerben. A katonai vevők rendelkeznek egy dekóderrel, amely eltünteti a SA hibát, így ők sokkal pontosabb eredményt kapnak. Szerencsére ezek a pontatlanságok nem adódnak össze többszörösen hibaként. A GPS differenciális módszerével ezek a problémák jelentősen csökkenthetők. Erről még később tárgyalunk.
37 Szándékos zavarás (SA) 2 Clinton elnök döntésére európai idő szerint május 2-án hajnalban megszüntették a GPS pontosságának mesterséges rontását. A hivatalos közlés szerint ezzel a valós idejű helymeghatározás pontossága tízszeresére nőtt, azaz a vízszintes helymeghatározás hibája mintegy tíz méterre csökkent. A gyakorlati tapasztalatok szerint azonban sok esetben néhány méteres pontosság is elérhető.
38 A hibaforrások által keletkező pontatlanságok mértéke A hiba jellege méterben (műholdanként) szabályos GPS Differenciális GPS Műhold óra Pályahiba Ionoszféra Troposzféra Vevő zaj Többutas terjedés SA
39 Európai és Orosz rendszerek GLONASS (GLObal NAvigation Satellite System) EGNOS (European Geostationary Navigation Overlay Service)
40 Az EGNOS rendszer használhatósága
41 Mérési bizonytalanság SA kóddal és nélküle.
42 Mérési eredmények
43 Mérési eredmények :24:00 09:54:00 10:24:00 10:54:00 11:24:00 11:54:00 12:24:00 12:54:00 13:24:00 13:54:00 14:24:00 14:54:00 15:24:00 15:54:00 16:24:00 16:54:00 17:24:00 17:54:00 18:24:00 Number of satellites :24:00 09:54:00 10:24:00 10:54:00 11:24:00 11:54:00 12:24:00 12:54:00 13:24:00 13:54:00 14:24:00 14:54:00 15:24:00 15:54:00 16:24:00 16:54:00 17:24:00 17:54:00 18:24:00 DOP Az eltérés az adott koordinátájú helyen (Budapesten) megfelel: 8,02 méter szélesség mentén; 8 méter hosszúság mentén.
44 Mérési eredmények Number of satellites 09:00:00 09:40:00 10:20:00 11:00:00 11:40:00 12:20:00 13:00:00 13:40:00 14:20:00 15:00:00 15:40:00 16:20:00 17:00:00 17:40: DOP Az eltérés az adott koordinátájú helyen (Budapesten) megfelel: 14,55 méter szélesség mentén; 14,42 méter hosszúság mentén. 09:00:00 09:30:00 10:00:00 10:30:00 11:00:00 11:30:00 12:00:00 12:30:00 13:00:00 13:30:00 14:00:00 14:30:00 15:00:00 15:30:00 16:00:00 16:30:00 17:00:00 17:30:00 18:00:00
45 Adatok feldolgozása A GPS adatait különféle programokkal fel lehet (kell dolgozni) térképi adatbázis létrehozása, rögzített útvonalak térképhez illesztése.
46 Adatok feldolgozása
47
48 Térképre illesztett nyomvonal
49 DGPS
50 Háttérinformációk
Alapok GPS előzmnyei Navstar How the GPS locate the position Tények Q/A GPS. Varsányi Péter
 Alapok előzmnyei Navstar How the locate the position Tények Q/A Óbudai Egyetem Alba Regia Egyetemi Központ (AREK) Székesfehérvár 2011. december 8. Alapok előzmnyei Navstar How the locate the position Tények
Alapok előzmnyei Navstar How the locate the position Tények Q/A Óbudai Egyetem Alba Regia Egyetemi Központ (AREK) Székesfehérvár 2011. december 8. Alapok előzmnyei Navstar How the locate the position Tények
Hegyi Ádám István ELTE, április 25.
 Hegyi Ádám István ELTE, 2012. április 25. GPS = Global Positioning System Department of Defense = Amerikai Egyesült Államok Védelmi Minisztériuma 1973 DNSS = Defense Navigation Satellite System vagy Navstar-GPS
Hegyi Ádám István ELTE, 2012. április 25. GPS = Global Positioning System Department of Defense = Amerikai Egyesült Államok Védelmi Minisztériuma 1973 DNSS = Defense Navigation Satellite System vagy Navstar-GPS
INFORMATIKA ÁGAZATI ALKALMAZÁSAI. Az Agrármérnöki MSc szak tananyagfejlesztése TÁMOP-4.1.2-08/1/A-2009-0010
 INFORMATIKA ÁGAZATI ALKALMAZÁSAI Az Agrármérnöki MSc szak tananyagfejlesztése TÁMOP-4.1.2-08/1/A-2009-0010 10. GPS, GPRS (mobilkommunikációs) ismeretek Helymeghatározás GPS rendszer alapelve GNSS rendszerek
INFORMATIKA ÁGAZATI ALKALMAZÁSAI Az Agrármérnöki MSc szak tananyagfejlesztése TÁMOP-4.1.2-08/1/A-2009-0010 10. GPS, GPRS (mobilkommunikációs) ismeretek Helymeghatározás GPS rendszer alapelve GNSS rendszerek
Robotika. Alapfogalmak. Robotok. Robot vagy automata. Robotok típusai. Robotok alkalmazási területei
 Robotika Alapfogalmak Robot Köznyelvi meghatározása: A robot (a szláv robota a.m. szolgaság, munka szóból) elektromechanikai szerkezet, amely előzetes programozás alapján képes különböző feladatok végrehajtására.
Robotika Alapfogalmak Robot Köznyelvi meghatározása: A robot (a szláv robota a.m. szolgaság, munka szóból) elektromechanikai szerkezet, amely előzetes programozás alapján képes különböző feladatok végrehajtására.
HÍRADÁSTECHNIKA I. Dr.Varga Péter János
 6. HÍRADÁSTECHNIKA I. Dr.Varga Péter János 2 Műholdas kommunikáció 3 4 Helymeghatározás 5 Alkalmazott műholdpályák, tulajdonságaik 6 Alkalmazott műholdpályák, tulajdonságaik A LEO [Low Earth Orbiter ]
6. HÍRADÁSTECHNIKA I. Dr.Varga Péter János 2 Műholdas kommunikáció 3 4 Helymeghatározás 5 Alkalmazott műholdpályák, tulajdonságaik 6 Alkalmazott műholdpályák, tulajdonságaik A LEO [Low Earth Orbiter ]
Kincskeresés GPS-el: a korszerű navigáció alapjai
 2007. február 22. : a korszerű navigáció alapjai Kovács Béla Térképtudományi és Geoinformatikai Tanszék Eötvös Loránd Tudományegyetem, Informatika Kar Térképtudományi és Geoinformatikai Tanszék 1117 Budapest,
2007. február 22. : a korszerű navigáció alapjai Kovács Béla Térképtudományi és Geoinformatikai Tanszék Eötvös Loránd Tudományegyetem, Informatika Kar Térképtudományi és Geoinformatikai Tanszék 1117 Budapest,
Híradástechnika I. 5.ea
 } Híradástechnika I. 5.ea Dr.Varga Péter János 2 Műholdas kommunikáció 3 4 Alkalmazott műholdpályák, tulajdonságaik 5 Alkalmazott műholdpályák, tulajdonságaik A LEO [Low Earth Orbiter ] magába foglalja
} Híradástechnika I. 5.ea Dr.Varga Péter János 2 Műholdas kommunikáció 3 4 Alkalmazott műholdpályák, tulajdonságaik 5 Alkalmazott műholdpályák, tulajdonságaik A LEO [Low Earth Orbiter ] magába foglalja
GPS. Lehoczki Róbert Vadvilág Megőrzési Intézet Szent István Egyetem, Gödöllő
 GPS Lehoczki Róbert Vadvilág Megőrzési Intézet Szent István Egyetem, Gödöllő Három technológiát egyesít: GPS (helymeghatározás) Robosztus terepen is használható hardver Egyszerű és hatékony szoftver Mire
GPS Lehoczki Róbert Vadvilág Megőrzési Intézet Szent István Egyetem, Gödöllő Három technológiát egyesít: GPS (helymeghatározás) Robosztus terepen is használható hardver Egyszerű és hatékony szoftver Mire
2007. március 23. INFO SAVARIA 2007. GNSS alapok. Eötvös Loránd Tudományegyetem, Informatika Kar. Térképtudományi és Geoinformatikai Tanszék
 2007. március 23. INFO SAVARIA 2007 GPS/GNSS GNSS alapok Kovács Béla Térképtudományi és Geoinformatikai Tanszék Eötvös Loránd Tudományegyetem, Informatika Kar Térképtudományi és Geoinformatikai Tanszék
2007. március 23. INFO SAVARIA 2007 GPS/GNSS GNSS alapok Kovács Béla Térképtudományi és Geoinformatikai Tanszék Eötvös Loránd Tudományegyetem, Informatika Kar Térképtudományi és Geoinformatikai Tanszék
Babeș Bólyai Tudományegyetem Informatika kar Műholdas helymeghatározás a GPS rendszerrel
 Babeș Bólyai Tudományegyetem Informatika kar Műholdas helymeghatározás a GPS rendszerrel Szűcs Attila Levente Kolozsvár, 2010 Április 29. 1. Bevezető A GPS az angol Global Positioning System megnevezés
Babeș Bólyai Tudományegyetem Informatika kar Műholdas helymeghatározás a GPS rendszerrel Szűcs Attila Levente Kolozsvár, 2010 Április 29. 1. Bevezető A GPS az angol Global Positioning System megnevezés
TestLine - nummulites_gnss Minta feladatsor
 1.* Egy műholdas helymeghatározás lehet egyszerre abszolút és kinematikus. 2.* műholdak pillanatnyi helyzetéből és a megmért távolságokból számítható a vevő pozíciója. 3.* 0:55 Nehéz kinai BEIDOU, az amerikai
1.* Egy műholdas helymeghatározás lehet egyszerre abszolút és kinematikus. 2.* műholdak pillanatnyi helyzetéből és a megmért távolságokból számítható a vevő pozíciója. 3.* 0:55 Nehéz kinai BEIDOU, az amerikai
Adatgyűjtés. Kézi technológiák. Adatgyűjtési technológiák. Térbeli adatok jelenségek térbeli elhelyezkedése, kiterjedése, stb.
 Adatgyűjtés Adatgyűjtés Adatgyűjtési és adatnyerési technikák a térinformatikában Térbeli adatok jelenségek térbeli elhelyezkedése, kiterjedése, stb. Leíró (attributum) adatok a térképi objektumokhoz rendelt
Adatgyűjtés Adatgyűjtés Adatgyűjtési és adatnyerési technikák a térinformatikában Térbeli adatok jelenségek térbeli elhelyezkedése, kiterjedése, stb. Leíró (attributum) adatok a térképi objektumokhoz rendelt
GPS. 1.a A GLONASS rendszer. Feladata. A rendszer felépítése. A GLONASS és s a GALILEO GPS- rendszerek. Céljaiban NAVSTAR GPS rendszerhez
 GPS A GLONASS és s a GALILEO GPS- rendszerek Összeállította: Szűcs LászlL szló 1.a A GLONASS rendszer Globális lis Navigáci ciós s Műholdrendszer M orosz elnevezés s rövidr vidítése Céljaiban és s kialakításában
GPS A GLONASS és s a GALILEO GPS- rendszerek Összeállította: Szűcs LászlL szló 1.a A GLONASS rendszer Globális lis Navigáci ciós s Műholdrendszer M orosz elnevezés s rövidr vidítése Céljaiban és s kialakításában
A távérzékelésről. A műholdas helymeghatározás GPS 2012.05.18. 1
 A távérzékelésről. A műholdas helymeghatározás GPS 2012.05.18. 1 A térbeli adatok meghatározása elsődleges geometriai adatnyerési eljárások, másodlagos adatnyerési eljárások 2012.05.18. 2 Az elsődleges
A távérzékelésről. A műholdas helymeghatározás GPS 2012.05.18. 1 A térbeli adatok meghatározása elsődleges geometriai adatnyerési eljárások, másodlagos adatnyerési eljárások 2012.05.18. 2 Az elsődleges
Matematika 11 Koordináta geometria. matematika és fizika szakos középiskolai tanár. > o < szeptember 27.
 Matematika 11 Koordináta geometria Juhász László matematika és fizika szakos középiskolai tanár > o < 2015. szeptember 27. copyright: c Juhász László Ennek a könyvnek a használatát szerzői jog védi. A
Matematika 11 Koordináta geometria Juhász László matematika és fizika szakos középiskolai tanár > o < 2015. szeptember 27. copyright: c Juhász László Ennek a könyvnek a használatát szerzői jog védi. A
Takács Bence GPS: pontosság és megbízhatóság. Földmérők Világnapja és Európai Földmérők és Geoinformatikusok Napja Budapest, március 21.
 Takács Bence GPS: pontosság és megbízhatóság Földmérők Világnapja és Európai Földmérők és Geoinformatikusok Napja Budapest, 2018. március 21. AIRBUS A320 LOW VISIBILITY ILS CAT III AUTOLAND APPROACH IN
Takács Bence GPS: pontosság és megbízhatóság Földmérők Világnapja és Európai Földmérők és Geoinformatikusok Napja Budapest, 2018. március 21. AIRBUS A320 LOW VISIBILITY ILS CAT III AUTOLAND APPROACH IN
GPS szótár. A legfontosabb 25 kifejezés a GPS világából. Készítette: Gere Tamás A GPSArena.hu alapítója
 A legfontosabb 25 kifejezés a GPS világából Készítette: Gere Tamás A GPSArena.hu alapítója 2D/3D vétel Megadja, hogy a GPS vétel síkbeli (2D) vagy térbeli (3D). Utóbbi esetben magassági adat is rendelkezésre
A legfontosabb 25 kifejezés a GPS világából Készítette: Gere Tamás A GPSArena.hu alapítója 2D/3D vétel Megadja, hogy a GPS vétel síkbeli (2D) vagy térbeli (3D). Utóbbi esetben magassági adat is rendelkezésre
GNSS Modernizáció. Horváth Tamás FÖMI Kozmikus Geodéziai Obszervatórium Penc. Tea előadás, 2006. június 1., Penc
 1 GNSS Modernizáció Horváth Tamás FÖMI Kozmikus Geodéziai Obszervatórium Penc Tea előadás, 2006. június 1., Penc Tartalom GPS GLONASS Galileo 2 GPS Block IIR Block IIA Block IIF 3 A GPS pontossága GPS
1 GNSS Modernizáció Horváth Tamás FÖMI Kozmikus Geodéziai Obszervatórium Penc Tea előadás, 2006. június 1., Penc Tartalom GPS GLONASS Galileo 2 GPS Block IIR Block IIA Block IIF 3 A GPS pontossága GPS
ALKALMAZOTT TÉRINFORMATIKA 1.
 ALKALMAZOTT TÉRINFORMATIKA 1. FÖLDRAJZ ALAPSZAK (NAPPALI MUNKAREND) TANTÁRGYI KOMMUNIKÁCIÓS DOSSZIÉ MISKOLCI EGYETEM MŰSZAKI FÖLDTUDOMÁNYI KAR FÖLDRAJZ-GEOINFORMATIKA INTÉZET Miskolc, 2018. TARTALOMJEGYZÉK
ALKALMAZOTT TÉRINFORMATIKA 1. FÖLDRAJZ ALAPSZAK (NAPPALI MUNKAREND) TANTÁRGYI KOMMUNIKÁCIÓS DOSSZIÉ MISKOLCI EGYETEM MŰSZAKI FÖLDTUDOMÁNYI KAR FÖLDRAJZ-GEOINFORMATIKA INTÉZET Miskolc, 2018. TARTALOMJEGYZÉK
GPS és atomóra. Kunsági-Máté Sándor. Fizikus MSc 1. évfolyam
 GPS és atomóra Kunsági-Máté Sándor Fizikus MSc 1. évfolyam Informatikai eszközök fizikai alapjai, 2017. március 1. Eötvös Loránd Tudományegyetem, Természettudományi Kar, Budapest Történeti bevezető 1957
GPS és atomóra Kunsági-Máté Sándor Fizikus MSc 1. évfolyam Informatikai eszközök fizikai alapjai, 2017. március 1. Eötvös Loránd Tudományegyetem, Természettudományi Kar, Budapest Történeti bevezető 1957
Globális mőholdas navigációs rendszerek
 Globális mőholdas navigációs rendszerek Oktatási segédanyag a vadgazda MSc levelezı hallgatók számára az EG520 Geomatikai és térinformatikai ismeretek címő tárgyhoz Készítette: Bazsó Tamás Kiegészítette:
Globális mőholdas navigációs rendszerek Oktatási segédanyag a vadgazda MSc levelezı hallgatók számára az EG520 Geomatikai és térinformatikai ismeretek címő tárgyhoz Készítette: Bazsó Tamás Kiegészítette:
Hol tart a GNSS állapot-tér modellezés bevezetése?
 Hol tart a GNSS állapot-tér modellezés bevezetése? Horváth Tamás FÖMI Kozmikus Geodéziai Obszervatórium horvath@gnssnet.hu www.gnssnet.hu Tel: +36-27-374-980, Mobil: +36-30-867-2570 Rédey István Geodéziai
Hol tart a GNSS állapot-tér modellezés bevezetése? Horváth Tamás FÖMI Kozmikus Geodéziai Obszervatórium horvath@gnssnet.hu www.gnssnet.hu Tel: +36-27-374-980, Mobil: +36-30-867-2570 Rédey István Geodéziai
Automatikus Fedélzeti Irányító Rendszerek. Navigációs rendszerek a pilóta szemszögéből Tóth Gábor
 Automatikus Fedélzeti Irányító Rendszerek Navigációs rendszerek a pilóta szemszögéből Tóth Gábor VFR Visual Flight Rules A navigáció folyamatos földlátást igényel Minimálisan 5 km látástávolság szükséges
Automatikus Fedélzeti Irányító Rendszerek Navigációs rendszerek a pilóta szemszögéből Tóth Gábor VFR Visual Flight Rules A navigáció folyamatos földlátást igényel Minimálisan 5 km látástávolság szükséges
Helymeghatározó rendszerek
 Helymeghatározó rendszerek objektumok (járművek, utazók, áruk, stb.) térbeli jellemzői + digitális térkép forgalomirányító, forgalombefolyásoló és navigációs rendszerek, valamint a helytől függő információs
Helymeghatározó rendszerek objektumok (járművek, utazók, áruk, stb.) térbeli jellemzői + digitális térkép forgalomirányító, forgalombefolyásoló és navigációs rendszerek, valamint a helytől függő információs
INFORMATIKA ÁGAZATI ALKALMAZÁSAI. Az Agrármérnöki MSc szak tananyagfejlesztése TÁMOP-4.1.2-08/1/A-2009-0010
 INFORMATIKA ÁGAZATI ALKALMAZÁSAI Az Agrármérnöki MSc szak tananyagfejlesztése TÁMOP-4.1.2-08/1/A-2009-0010 13. GNSS mérés tervezése, végrehajtása Tervezés célja, eszközei, almanach GNSS tervező szoftverek
INFORMATIKA ÁGAZATI ALKALMAZÁSAI Az Agrármérnöki MSc szak tananyagfejlesztése TÁMOP-4.1.2-08/1/A-2009-0010 13. GNSS mérés tervezése, végrehajtása Tervezés célja, eszközei, almanach GNSS tervező szoftverek
A rendszer legfontosabb jellemzőit az alábbiakban foglalhatjuk össze:
 GPS nyomkövető készülék, illetve navigációs rendszerek A GPS a Global Positioning System angol rövidítése és globális helymeghatározó rendszert jelent. Egy rendszer, amely 24 műholdból áll, melyet az USA
GPS nyomkövető készülék, illetve navigációs rendszerek A GPS a Global Positioning System angol rövidítése és globális helymeghatározó rendszert jelent. Egy rendszer, amely 24 műholdból áll, melyet az USA
HÍRADÁSTECHNIKA I. Dr.Varga Péter János
 3. HÍRADÁSTECHNIKA I. Dr.Varga Péter János 2 Műholdas kommunikáció 3 4 Helymeghatározás 5 Alkalmazott műholdpályák, tulajdonságaik 6 Alkalmazott műholdpályák, tulajdonságaik A LEO [Low Earth Orbiter ]
3. HÍRADÁSTECHNIKA I. Dr.Varga Péter János 2 Műholdas kommunikáció 3 4 Helymeghatározás 5 Alkalmazott műholdpályák, tulajdonságaik 6 Alkalmazott műholdpályák, tulajdonságaik A LEO [Low Earth Orbiter ]
Műholdas infokommunikációs rendszerek
 Mobil Informatika Műholdas infokommunikációs rendszerek Dr. Kutor László OE-NIK, Dr.Kutor László MoI 4/24/1 Műholdas távközlési rendszerek GEO (Geostationary Earth Orbit Satellite) Geostacionáris pályán
Mobil Informatika Műholdas infokommunikációs rendszerek Dr. Kutor László OE-NIK, Dr.Kutor László MoI 4/24/1 Műholdas távközlési rendszerek GEO (Geostationary Earth Orbit Satellite) Geostacionáris pályán
Nehézségi gyorsulás mérése megfordítható ingával
 Nehézségi gyorsulás mérése megfordítható ingával (Mérési jegyzőkönyv) Hagymási Imre 2007. április 21. (hétfő délelőtti csoport) 1. A mérés elmélete A nehézségi gyorsulás mérésének egy klasszikus módja
Nehézségi gyorsulás mérése megfordítható ingával (Mérési jegyzőkönyv) Hagymási Imre 2007. április 21. (hétfő délelőtti csoport) 1. A mérés elmélete A nehézségi gyorsulás mérésének egy klasszikus módja
Helymeghatározó technikák
 Mobil Informatika Dr. Kutor László Helymeghatározó technikák http://uni-obuda.hu/users/kutor/ MoI 5/24/1 Műholdas távközlési rendszerek GEO (Geostationary Earth Orbit Satellite) Geostacionáris pályán keringő
Mobil Informatika Dr. Kutor László Helymeghatározó technikák http://uni-obuda.hu/users/kutor/ MoI 5/24/1 Műholdas távközlési rendszerek GEO (Geostationary Earth Orbit Satellite) Geostacionáris pályán keringő
KUTATÁSI JELENTÉS. Multilaterációs radarrendszer kutatása. Szüllő Ádám
 KUTATÁSI JELENTÉS Multilaterációs radarrendszer kutatása Szüllő Ádám 212 Bevezetés A Mikrohullámú Távérzékelés Laboratórium jelenlegi K+F tevékenységei közül ezen jelentés a multilaterációs radarrendszerek
KUTATÁSI JELENTÉS Multilaterációs radarrendszer kutatása Szüllő Ádám 212 Bevezetés A Mikrohullámú Távérzékelés Laboratórium jelenlegi K+F tevékenységei közül ezen jelentés a multilaterációs radarrendszerek
MIKOVINY SÁMUEL TÉRINFORMATIKAI EMLÉKVERSENY
 FVM VIDÉKFEJLESZTÉSI, KÉPZÉSI ÉS SZAKTANÁCSADÁSI INTÉZET NYUGAT MAGYARORSZÁGI EGYETEM GEOINFORMATIKAI KAR MIKOVINY SÁMUEL TÉRINFORMATIKAI EMLÉKVERSENY 2008/2009. TANÉV Az I. FORDULÓ FELADATAI NÉV:... Tudnivalók
FVM VIDÉKFEJLESZTÉSI, KÉPZÉSI ÉS SZAKTANÁCSADÁSI INTÉZET NYUGAT MAGYARORSZÁGI EGYETEM GEOINFORMATIKAI KAR MIKOVINY SÁMUEL TÉRINFORMATIKAI EMLÉKVERSENY 2008/2009. TANÉV Az I. FORDULÓ FELADATAI NÉV:... Tudnivalók
Intelligens Közlekedési Rendszerek 2
 Intelligens Közlekedési Rendszerek 2 Máté Miklós 2016 Október 11 1 / 14 Szenzor (érzékelő): mérés, detektálás Mérés elmélet emlékeztető Jó mérőműszer tulajdonságai Érzékeny a mérendő tulajdonságra Érzéketlen
Intelligens Közlekedési Rendszerek 2 Máté Miklós 2016 Október 11 1 / 14 Szenzor (érzékelő): mérés, detektálás Mérés elmélet emlékeztető Jó mérőműszer tulajdonságai Érzékeny a mérendő tulajdonságra Érzéketlen
GPS mérési jegyz könyv
 GPS mérési jegyz könyv Mérést végezte: Csutak Balázs, Laczkó Hunor Mérés helye: ITK 320. terem és az egyetem környéke Mérés ideje: 2016.03.16 A mérés célja: Ismerkedés a globális helymeghatározó rendszerrel,
GPS mérési jegyz könyv Mérést végezte: Csutak Balázs, Laczkó Hunor Mérés helye: ITK 320. terem és az egyetem környéke Mérés ideje: 2016.03.16 A mérés célja: Ismerkedés a globális helymeghatározó rendszerrel,
PPP-RTK a hálózati RTK jövője?
 1 PPP-RTK a hálózati RTK jövője? Horváth Tamás FÖMI Kozmikus Geodéziai Obszervatórium Penc Rédey Szeminárium, BME, 006. április 6., Budapest Tartalom Emlékeztető Mérés-tér, állapot-tér PPP PPP-RTK Emlékeztető
1 PPP-RTK a hálózati RTK jövője? Horváth Tamás FÖMI Kozmikus Geodéziai Obszervatórium Penc Rédey Szeminárium, BME, 006. április 6., Budapest Tartalom Emlékeztető Mérés-tér, állapot-tér PPP PPP-RTK Emlékeztető
A GPS pozíciók pontosításának lehetőségei
 A GPS pozíciók pontosításának lehetőségei GIS OPEN 2005 Bartha Csaba csaba.bartha@geopro.hu Milyen fogalmakkal találkozunk? VRS GPS FKP EGNOS DGPS RTCM OGPSH GLONASS WAAS RTK STATIKUS GSM KINEMATIKUS URH
A GPS pozíciók pontosításának lehetőségei GIS OPEN 2005 Bartha Csaba csaba.bartha@geopro.hu Milyen fogalmakkal találkozunk? VRS GPS FKP EGNOS DGPS RTCM OGPSH GLONASS WAAS RTK STATIKUS GSM KINEMATIKUS URH
Rádiófrekvenciás kommunikációs rendszerek
 Rádiófrekvenciás kommunikációs rendszerek Adó Adó Vevő Jellemzően broadcast adás (széles földrajzi terület besugárzása, TV, Rádió műsor adás) Adó Vevő Vevő Adó Különböző kommunikációs formák. Kis- és nagykapacitású
Rádiófrekvenciás kommunikációs rendszerek Adó Adó Vevő Jellemzően broadcast adás (széles földrajzi terület besugárzása, TV, Rádió műsor adás) Adó Vevő Vevő Adó Különböző kommunikációs formák. Kis- és nagykapacitású
Rallyinfo.hu - GPS rendszer működésének technikai leírása V1
 Rallyinfo.hu - GPS rendszer működésének technikai leírása V1 1. ábra: GPS doboz Méretei: 115x90x55mm Súlya: 340g + 2db csőbilincs 110g GPS mérés általános működési elve: A GPS egy fejlett helymeghatározó
Rallyinfo.hu - GPS rendszer működésének technikai leírása V1 1. ábra: GPS doboz Méretei: 115x90x55mm Súlya: 340g + 2db csőbilincs 110g GPS mérés általános működési elve: A GPS egy fejlett helymeghatározó
ADATÁTVITELI RENDSZEREK A GLOBÁLIS LOGISZTIKÁBAN
 9. ELŐADÁS ADATÁTVITELI RENDSZEREK A GLOBÁLIS LOGISZTIKÁBAN A logisztikai rendszerek irányításához szükség van az adatok továbbítására a rendszer különböző elemei között. Ezt a feladatot a különböző adatátviteli
9. ELŐADÁS ADATÁTVITELI RENDSZEREK A GLOBÁLIS LOGISZTIKÁBAN A logisztikai rendszerek irányításához szükség van az adatok továbbítására a rendszer különböző elemei között. Ezt a feladatot a különböző adatátviteli
Csatlakozási állapot megjelenítése
 Csatlakozási állapot megjelenítése Ellenőrizheti a vevő és a jármű között a csatlakozás állapotát. Ezek a kapcsolatok felelősek az olyan információkért, mint a GPS információ és a parkolási jelzések. 1
Csatlakozási állapot megjelenítése Ellenőrizheti a vevő és a jármű között a csatlakozás állapotát. Ezek a kapcsolatok felelősek az olyan információkért, mint a GPS információ és a parkolási jelzések. 1
A szférák zenéjétől és az űridőjárásig. avagy mi a kapcsolat az Antarktisz és a műholdak között. Lichtenberger János
 A szférák zenéjétől és az űridőjárásig avagy mi a kapcsolat az Antarktisz és a műholdak között Lichtenberger János ELTE Geofizikai és Űrtudományi Tanszék Űrkutató Csoport Egy kis közvéleménykutatás 1.
A szférák zenéjétől és az űridőjárásig avagy mi a kapcsolat az Antarktisz és a műholdak között Lichtenberger János ELTE Geofizikai és Űrtudományi Tanszék Űrkutató Csoport Egy kis közvéleménykutatás 1.
Agrár-környezetvédelmi Modul Agrár-környezetvédelem, agrotechnológia. KÖRNYEZETGAZDÁLKODÁSI MÉRNÖKI MSc TERMÉSZETVÉDELMI MÉRNÖKI MSc
 Agrár-környezetvédelmi Modul Agrár-környezetvédelem, agrotechnológia KÖRNYEZETGAZDÁLKODÁSI MÉRNÖKI MSc TERMÉSZETVÉDELMI MÉRNÖKI MSc Precíziós mezőgazdaság információ technológiai alapjai II. 138.lecke
Agrár-környezetvédelmi Modul Agrár-környezetvédelem, agrotechnológia KÖRNYEZETGAZDÁLKODÁSI MÉRNÖKI MSc TERMÉSZETVÉDELMI MÉRNÖKI MSc Precíziós mezőgazdaság információ technológiai alapjai II. 138.lecke
Interferencia jelenségek a BME permanens állomásán
 Interferencia jelenségek a BME permanens állomásán Takács Bence, egyetemi docens takacs.bence@epito.bme.hu Rédey szeminárium 2017. március 3. Nagy teljesítményű blokkolók hatótávolság : 200 km adó teljesítmény
Interferencia jelenségek a BME permanens állomásán Takács Bence, egyetemi docens takacs.bence@epito.bme.hu Rédey szeminárium 2017. március 3. Nagy teljesítményű blokkolók hatótávolság : 200 km adó teljesítmény
Troposzféra modellezés. Braunmüller Péter április 12
 Troposzféra modellezés Braunmüller Péter Tartalom Légkör Troposzféra modellezés Elvégzett vizsgálatok Eredmények Légkör A légkör jelterjedése a GNSS jelekre gyakorolt hatásuk szempontjából két részre osztható
Troposzféra modellezés Braunmüller Péter Tartalom Légkör Troposzféra modellezés Elvégzett vizsgálatok Eredmények Légkör A légkör jelterjedése a GNSS jelekre gyakorolt hatásuk szempontjából két részre osztható
Hogyan lehet meghatározni az égitestek távolságát?
 Hogyan lehet meghatározni az égitestek távolságát? Először egy régóta használt, praktikus módszerről lesz szó, amelyet a térképészetben is alkalmaznak. Ez a geometriai háromszögelésen alapul, trigonometriai
Hogyan lehet meghatározni az égitestek távolságát? Először egy régóta használt, praktikus módszerről lesz szó, amelyet a térképészetben is alkalmaznak. Ez a geometriai háromszögelésen alapul, trigonometriai
Miskolci Egyetem Doktori Tanácsa Miskolc. Program: Geotechniaki rendszerek és eljárástechnika Programvezető: Dr. Kovács Ferenc
 Miskolci Egyetem Doktori Tanácsa Miskolc Program: Geotechniaki rendszerek és eljárástechnika Programvezető: Dr. Kovács Ferenc Alprogram: Geotechnikai rendszerek és eljárások kutatása, fejlesztése Részprogram:
Miskolci Egyetem Doktori Tanácsa Miskolc Program: Geotechniaki rendszerek és eljárástechnika Programvezető: Dr. Kovács Ferenc Alprogram: Geotechnikai rendszerek és eljárások kutatása, fejlesztése Részprogram:
HÍRADÁSTECHNIKA. 5.ea. Dr.Varga Péter János
 HÍRADÁSTECHNIKA 5.ea Dr.Varga Péter János 2 Műholdas kommunikáció 3 4 Helymeghatározás 5 Alkalmazott műholdpályák, tulajdonságaik 6 Alkalmazott műholdpályák, tulajdonságaik A LEO [Low Earth Orbiter ] magába
HÍRADÁSTECHNIKA 5.ea Dr.Varga Péter János 2 Műholdas kommunikáció 3 4 Helymeghatározás 5 Alkalmazott műholdpályák, tulajdonságaik 6 Alkalmazott műholdpályák, tulajdonságaik A LEO [Low Earth Orbiter ] magába
Koordinátarendszerek, dátumok, GPS
 Koordinátarendszerek, dátumok, GPS KOORDINÁTARENDSZEREK A SPATIAL-BEN Koordinátarendszer típusok 1. Descartes-féle koordinátarendszer: egy adott pontból (origó) kiinduló, egymásra merőleges egyenesek alkotják,
Koordinátarendszerek, dátumok, GPS KOORDINÁTARENDSZEREK A SPATIAL-BEN Koordinátarendszer típusok 1. Descartes-féle koordinátarendszer: egy adott pontból (origó) kiinduló, egymásra merőleges egyenesek alkotják,
Debreceni Egyetem szaki kar Épít mérnöki tanszék
 Debreceni Egyetem szaki kar Épít mérnöki tanszék 1. el adás Mértékegységek és alapm veletek 2011/12 tanév,1.félév Varga Zsolt Készült: Dr. Csepregi Szabolcs:Földmérési ismeretek c. jegyzete alapján,valamint
Debreceni Egyetem szaki kar Épít mérnöki tanszék 1. el adás Mértékegységek és alapm veletek 2011/12 tanév,1.félév Varga Zsolt Készült: Dr. Csepregi Szabolcs:Földmérési ismeretek c. jegyzete alapján,valamint
A műholdas helymeghatározás alapjai
 Népszerűen a műholdas helymeghatározásról és navigációról 1. rész Az idő mérése, karóránk leolvasása, ma mindannyiunk számára természetes tevékenység. De vajon ugyanilyen természetes és szükséges lesz-e
Népszerűen a műholdas helymeghatározásról és navigációról 1. rész Az idő mérése, karóránk leolvasása, ma mindannyiunk számára természetes tevékenység. De vajon ugyanilyen természetes és szükséges lesz-e
Mérés: Millikan olajcsepp-kísérlete
 Mérés: Millikan olajcsepp-kísérlete Mérés célja: 1909-ben ezt a mérést Robert Millikan végezte el először. Mérése során meg tudta határozni az elemi részecskék töltését. Ezért a felfedezéséért Nobel-díjat
Mérés: Millikan olajcsepp-kísérlete Mérés célja: 1909-ben ezt a mérést Robert Millikan végezte el először. Mérése során meg tudta határozni az elemi részecskék töltését. Ezért a felfedezéséért Nobel-díjat
Leica Viva GNSS SmartLink technológia. Csábi Zoltán mérnök üzletkötő, Kelet-Magyarország
 Leica Viva GNSS SmartLink technológia Csábi Zoltán mérnök üzletkötő, Kelet-Magyarország Kitoljuk a határokat Leica Viva GNSS technológia Az igazi határ ott van ahol a műszer még éppen működik, illetve
Leica Viva GNSS SmartLink technológia Csábi Zoltán mérnök üzletkötő, Kelet-Magyarország Kitoljuk a határokat Leica Viva GNSS technológia Az igazi határ ott van ahol a műszer még éppen működik, illetve
GNSS/RNSS rendszerek a földmegfigyelésben. Dr. Rózsa Szabolcs. Általános és Felsőgeodézia Tanszék
 GNSS/RNSS rendszerek a földmegfigyelésben Általános és Felsőgeodézia Tanszék Dr. Rózsa Szabolcs Minőségorientált, összehangolt oktatási és K+F+I stratégia, valamint működési modell kidolgozása a Műegyetemen
GNSS/RNSS rendszerek a földmegfigyelésben Általános és Felsőgeodézia Tanszék Dr. Rózsa Szabolcs Minőségorientált, összehangolt oktatási és K+F+I stratégia, valamint működési modell kidolgozása a Műegyetemen
INFORMATIKA ÁGAZATI ALKALMAZÁSAI. Az Agrármérnöki MSc szak tananyagfejlesztése TÁMOP /1/A
 INFORMATIKA ÁGAZATI ALKALMAZÁSAI Az Agrármérnöki MSc szak tananyagfejlesztése TÁMOP-4.1.2-08/1/A-2009-0010 11. Globális helymeghatározás pontosító rendszerei Pontosságot befolyásoló tényezők Differenciális
INFORMATIKA ÁGAZATI ALKALMAZÁSAI Az Agrármérnöki MSc szak tananyagfejlesztése TÁMOP-4.1.2-08/1/A-2009-0010 11. Globális helymeghatározás pontosító rendszerei Pontosságot befolyásoló tényezők Differenciális
ELEKTRONIKUS MARKETING GYÖNGYÖS MÁTRA. Készítette: Heves Megyei Kereskedelmi és Iparkamara 3300 Eger, Faiskola út 15.
 ELEKTRONIKUS MARKETING GYÖNGYÖS MÁTRA Készítette: Heves Megyei Kereskedelmi és Iparkamara 3300 Eger, Faiskola út 15. A projekt a turisztikai célelőirányzatból került támogatásra MPIO FY-1000 jelű MP4-es
ELEKTRONIKUS MARKETING GYÖNGYÖS MÁTRA Készítette: Heves Megyei Kereskedelmi és Iparkamara 3300 Eger, Faiskola út 15. A projekt a turisztikai célelőirányzatból került támogatásra MPIO FY-1000 jelű MP4-es
, ,457. GNSS technológia Budapest június 20 július 1.
 110,457 110,457 2 1 3 4 2 GNNS Elv, módszerek, Budapest 2016. június Földmérési és Távérzékelési Intézet Navigare necesse est, vivere non est necesse! Hajózni kell, élni nem kell!", Pompeius 6 3 TÁJÉKOZÓDÁS
110,457 110,457 2 1 3 4 2 GNNS Elv, módszerek, Budapest 2016. június Földmérési és Távérzékelési Intézet Navigare necesse est, vivere non est necesse! Hajózni kell, élni nem kell!", Pompeius 6 3 TÁJÉKOZÓDÁS
HÍRKÖZLÉSTECHNIKA. 4.ea. Dr.Varga Péter János
 HÍRKÖZLÉSTECHNIKA 4.ea Dr.Varga Péter János Pont-pont összeköttetés tervezése 2 Wifi Fresnel 3 Pont-pont összeköttetés tervezése 4 Pont-pont összeköttetés tervezése 5 Tengeri kábelezés 6 7 Műholdas kommunikáció
HÍRKÖZLÉSTECHNIKA 4.ea Dr.Varga Péter János Pont-pont összeköttetés tervezése 2 Wifi Fresnel 3 Pont-pont összeköttetés tervezése 4 Pont-pont összeköttetés tervezése 5 Tengeri kábelezés 6 7 Műholdas kommunikáció
LOKÁLIS IONOSZFÉRA MODELLEZÉS ÉS ALKALMAZÁSA A GNSS HELYMEGHATÁROZÁSBAN
 LOKÁLIS IONOSZFÉRA MODELLEZÉS ÉS ALKALMAZÁSA A GNSS HELYMEGHATÁROZÁSBAN Juni Ildikó Budapesti Műszaki és Gazdaságtudományi Egyetem BSc IV. évfolyam Konzulens: Dr. Rózsa Szabolcs MFTT 29. Vándorgyűlés,
LOKÁLIS IONOSZFÉRA MODELLEZÉS ÉS ALKALMAZÁSA A GNSS HELYMEGHATÁROZÁSBAN Juni Ildikó Budapesti Műszaki és Gazdaságtudományi Egyetem BSc IV. évfolyam Konzulens: Dr. Rózsa Szabolcs MFTT 29. Vándorgyűlés,
Robotika. Relatív helymeghatározás Odometria
 Robotika Relatív helymeghatározás Odometria Differenciális hajtás c m =πd n /nc e c m D n C e n = hány mm-t tesz meg a robot egy jeladó impulzusra = névleges kerék átmérő = jeladó fölbontása (impulzus/ford.)
Robotika Relatív helymeghatározás Odometria Differenciális hajtás c m =πd n /nc e c m D n C e n = hány mm-t tesz meg a robot egy jeladó impulzusra = névleges kerék átmérő = jeladó fölbontása (impulzus/ford.)
A DIGITÁLIS TÉRKÉP ADATAINAK ELŐÁLLÍTÁSA, ADATNYERÉSI ELJÁRÁSOK
 A DIGITÁLIS TÉRKÉP ADATAINAK ELŐÁLLÍTÁSA, ADATNYERÉSI ELJÁRÁSOK - két féle adatra van szükségünk: térbeli és leíró adatra - a térbeli adat előállítása a bonyolultabb. - a költségek nagyjából 80%-a - munkaigényes,
A DIGITÁLIS TÉRKÉP ADATAINAK ELŐÁLLÍTÁSA, ADATNYERÉSI ELJÁRÁSOK - két féle adatra van szükségünk: térbeli és leíró adatra - a térbeli adat előállítása a bonyolultabb. - a költségek nagyjából 80%-a - munkaigényes,
 A felhasználói szegmens GPS technikák 4. A felhasználói szegmens mindenki, aki hely, sebesség és időadatokat akar meghatározni mindenki, aki a légkörön átmenő elektromágneses hullámokat akar vizsgálni
A felhasználói szegmens GPS technikák 4. A felhasználói szegmens mindenki, aki hely, sebesség és időadatokat akar meghatározni mindenki, aki a légkörön átmenő elektromágneses hullámokat akar vizsgálni
BT-R820 Használati utasítás BT-R820 Wireless GPS Egység Használati utasítás Dátum: Szeptember, 2006 Verzió: 1.1
 BT-R820 Wireless GPS Egység Használati utasítás Dátum: Szeptember, 2006 Verzió: 1.1 1. oldal TARTALOMJEGYZÉK 0. Gyors telepítés...3 1. Bevezetés...4 1.1 Áttekintés...4 1.2 Fő jellemzők...4 1.3 Alkalmazási
BT-R820 Wireless GPS Egység Használati utasítás Dátum: Szeptember, 2006 Verzió: 1.1 1. oldal TARTALOMJEGYZÉK 0. Gyors telepítés...3 1. Bevezetés...4 1.1 Áttekintés...4 1.2 Fő jellemzők...4 1.3 Alkalmazási
Piri Dávid. Mérőállomás célkövető üzemmódjának pontossági vizsgálata
 Piri Dávid Mérőállomás célkövető üzemmódjának pontossági vizsgálata Feladat ismertetése Mozgásvizsgálat robot mérőállomásokkal Automatikus irányzás Célkövetés Pozíció folyamatos rögzítése Célkövető üzemmód
Piri Dávid Mérőállomás célkövető üzemmódjának pontossági vizsgálata Feladat ismertetése Mozgásvizsgálat robot mérőállomásokkal Automatikus irányzás Célkövetés Pozíció folyamatos rögzítése Célkövető üzemmód
Mőholdas helymeghatározás
 Mőholdas helymeghatározás Szatmári József Szegedi Tudományegyetem Természeti Földrajzi és Geoinformatikai Tanszék Tájékozódás a Földön Global Positioning System: a nagy ötlet Néhány alaptétel GPS vevık
Mőholdas helymeghatározás Szatmári József Szegedi Tudományegyetem Természeti Földrajzi és Geoinformatikai Tanszék Tájékozódás a Földön Global Positioning System: a nagy ötlet Néhány alaptétel GPS vevık
A Föld helye a Világegyetemben. A Naprendszer
 A Föld helye a Világegyetemben A Naprendszer Mértékegységek: Fényév: az a távolság, amelyet a fény egy év alatt tesz meg. (A fény terjedési sebessége: 300.000 km.s -1.) Egy év alatt: 60.60.24.365.300 000
A Föld helye a Világegyetemben A Naprendszer Mértékegységek: Fényév: az a távolság, amelyet a fény egy év alatt tesz meg. (A fény terjedési sebessége: 300.000 km.s -1.) Egy év alatt: 60.60.24.365.300 000
A GNSS infrastruktúrára támaszkodó műholdas helymeghatározás. Borza Tibor (FÖMI KGO) Busics György (NyME GEO)
 Busics György (NyME GEO)") A GNSS infrastruktúrára támaszkodó műholdas helymeghatározás Borza Tibor (FÖMI KGO) Busics György (NyME GEO) Tartalom Mi a GNSS, a GNSS infrastruktúra? Melyek az infrastruktúra szintjei? Mi a hazai helyzet?
A GNSS infrastruktúrára támaszkodó műholdas helymeghatározás Borza Tibor (FÖMI KGO) Busics György (NyME GEO) Tartalom Mi a GNSS, a GNSS infrastruktúra? Melyek az infrastruktúra szintjei? Mi a hazai helyzet?
Mennyit is késik? Troposzféra-modellezés a GNSSnet.hu rendszerében
 Mennyit is késik? Troposzféra-modellezés a GNSSnet.hu rendszerében Tea előadás 2012. 02. 07. Penc Braunmüller Péter A GNSSnet.hu hálózati szoftverében (Geo++ GNSMART) elérhető troposzféra modellek vizsgálata
Mennyit is késik? Troposzféra-modellezés a GNSSnet.hu rendszerében Tea előadás 2012. 02. 07. Penc Braunmüller Péter A GNSSnet.hu hálózati szoftverében (Geo++ GNSMART) elérhető troposzféra modellek vizsgálata
Ismétlő feladatsor: 10.A/I.
 Ismétlő feladatsor: 0.A/I. Harasztos Barnabás 205. január. Feladat Mekkora az alábbi ábrán (szürkével) jelölt síkidom összterülete? A terület egységének a négyzetrács egy négyzetének területét tekintjük!
Ismétlő feladatsor: 0.A/I. Harasztos Barnabás 205. január. Feladat Mekkora az alábbi ábrán (szürkével) jelölt síkidom összterülete? A terület egységének a négyzetrács egy négyzetének területét tekintjük!
A vasút életéhez. Örvény-áramú sínpálya vizsgáló a Shinkawa-tól. Certified by ISO9001 SHINKAWA
 SHINKAWA Certified by ISO9001 Örvény-áramú sínpálya vizsgáló a Shinkawa-tól Technikai Jelentés A vasút életéhez A Shinkawa örvény-áramú sínpálya vizsgáló rendszer, gyors állapotmeghatározásra képes, még
SHINKAWA Certified by ISO9001 Örvény-áramú sínpálya vizsgáló a Shinkawa-tól Technikai Jelentés A vasút életéhez A Shinkawa örvény-áramú sínpálya vizsgáló rendszer, gyors állapotmeghatározásra képes, még
A GPS-rendszer. Adatgyűjtés A GPS. Helymeghatározási eljárások. 1. Földi geodéziai módszerek Mérőállomás
 Adatgyűjtés A GPS-rendszer Összeállította: Szűcs László Geometriai adatok gyűjtése Attribútum adatok gyűjtés Adatnyerés elsődleges: méréskor a tárgyal vagy képével fizikai kapcsolatba kerülünk másodlagos:
Adatgyűjtés A GPS-rendszer Összeállította: Szűcs László Geometriai adatok gyűjtése Attribútum adatok gyűjtés Adatnyerés elsődleges: méréskor a tárgyal vagy képével fizikai kapcsolatba kerülünk másodlagos:
Háromszögek ismétlés Háromszög egyenlőtlenség(tétel a háromszög oldalairól.) Háromszög szögei (Belső, külső szögek fogalma és összegük) Háromszögek
 Háromszög szögei (Belső, külső szögek fogalma és összegük) Háromszögek") 2013. 11.19. Háromszögek ismétlés Háromszög egyenlőtlenség(tétel a háromszög oldalairól.) Háromszög szögei (Belső, külső szögek fogalma és összegük) Háromszögek csoportosítása szögeik szerint (hegyes-,
2013. 11.19. Háromszögek ismétlés Háromszög egyenlőtlenség(tétel a háromszög oldalairól.) Háromszög szögei (Belső, külső szögek fogalma és összegük) Háromszögek csoportosítása szögeik szerint (hegyes-,
Térinformatikai DGPS NTRIP vétel és feldolgozás
 Térinformatikai DGPS NTRIP vétel és feldolgozás Méréseinkhez a Thales Mobile Mapper CE térinformatikai GPS vevıt használtunk. A mérést a Szegedi Tudományegyetem Egyetem utcai épületének tetején található
Térinformatikai DGPS NTRIP vétel és feldolgozás Méréseinkhez a Thales Mobile Mapper CE térinformatikai GPS vevıt használtunk. A mérést a Szegedi Tudományegyetem Egyetem utcai épületének tetején található
Haladó mozgások A hely és a mozgás viszonylagos. A testek helyét, mozgását valamilyen vonatkoztatási ponthoz, vonatkoztatási rendszerhez képest adjuk
 Haladó mozgások A hely és a mozgás viszonylagos. A testek helyét, mozgását valamilyen vonatkoztatási ponthoz, vonatkoztatási rendszerhez képest adjuk meg, ahhoz viszonyítjuk. pl. A vonatban utazó ember
Haladó mozgások A hely és a mozgás viszonylagos. A testek helyét, mozgását valamilyen vonatkoztatási ponthoz, vonatkoztatási rendszerhez képest adjuk meg, ahhoz viszonyítjuk. pl. A vonatban utazó ember
Fine-Grained Network Time Synchronization using Reference Broadcast
 Fine-Grained Network Time Synchronization using Reference Broadcast Ofszet Az indítás óta eltelt idıt mérik Az ofszet változása: skew Az órák sebességének különbsége Oka: Az óra az oszcillátor pontatlanságát
Fine-Grained Network Time Synchronization using Reference Broadcast Ofszet Az indítás óta eltelt idıt mérik Az ofszet változása: skew Az órák sebességének különbsége Oka: Az óra az oszcillátor pontatlanságát
Agrár-környezetvédelmi Modul Agrár-környezetvédelem, agrotechnológia. KÖRNYEZETGAZDÁLKODÁSI MÉRNÖKI MSc TERMÉSZETVÉDELMI MÉRNÖKI MSc
 Agrár-környezetvédelmi Modul Agrár-környezetvédelem, agrotechnológia KÖRNYEZETGAZDÁLKODÁSI MÉRNÖKI MSc TERMÉSZETVÉDELMI MÉRNÖKI MSc Precíziós mezőgazdaság információ technológiai alapjai I. 137.lecke Globális
Agrár-környezetvédelmi Modul Agrár-környezetvédelem, agrotechnológia KÖRNYEZETGAZDÁLKODÁSI MÉRNÖKI MSc TERMÉSZETVÉDELMI MÉRNÖKI MSc Precíziós mezőgazdaság információ technológiai alapjai I. 137.lecke Globális
Székesfehérvár
 1 2009.03.19. - Székesfehérvár System1200-2004 SmartStation - 2005 SmartRover - 2006 SmartPole/TPS1200+ 2007 SmartRTK + MAC 2008 GPS1200+ GNSS 2009-200? 2 ? Elérhető GNSS jelek haszn. Modern hálózati megold.
1 2009.03.19. - Székesfehérvár System1200-2004 SmartStation - 2005 SmartRover - 2006 SmartPole/TPS1200+ 2007 SmartRTK + MAC 2008 GPS1200+ GNSS 2009-200? 2 ? Elérhető GNSS jelek haszn. Modern hálózati megold.
ÉRZÉKELŐK ÉS BEAVATKOZÓK I. 3. MÉRÉSFELDOLGOZÁS
 ÉRZÉKELŐK ÉS BEAVATKOZÓK I. 3. MÉRÉSFELDOLGOZÁS Dr. Soumelidis Alexandros 2018.10.04. BME KÖZLEKEDÉSMÉRNÖKI ÉS JÁRMŰMÉRNÖKI KAR 32708-2/2017/INTFIN SZÁMÚ EMMI ÁLTAL TÁMOGATOTT TANANYAG Mérés-feldolgozás
ÉRZÉKELŐK ÉS BEAVATKOZÓK I. 3. MÉRÉSFELDOLGOZÁS Dr. Soumelidis Alexandros 2018.10.04. BME KÖZLEKEDÉSMÉRNÖKI ÉS JÁRMŰMÉRNÖKI KAR 32708-2/2017/INTFIN SZÁMÚ EMMI ÁLTAL TÁMOGATOTT TANANYAG Mérés-feldolgozás
HÍRADÁSTECHNIKA. Dr.Varga Péter János
 HÍRADÁSTECHNIKA Dr.Varga Péter János 2 A jelátvitel fizikai közegei 3 Vezeték nélküli átvitel Optikai átvitel - Lézer átvitel 4 pont-pont közötti adatátvitel, láthatóság átvitel lézerrel néhány km távolság
HÍRADÁSTECHNIKA Dr.Varga Péter János 2 A jelátvitel fizikai közegei 3 Vezeték nélküli átvitel Optikai átvitel - Lézer átvitel 4 pont-pont közötti adatátvitel, láthatóság átvitel lézerrel néhány km távolság
Mechanikai hullámok. Hullámhegyek és hullámvölgyek alakulnak ki.
 Mechanikai hullámok Mechanikai hullámnak nevezzük, ha egy anyagban az anyag részecskéinek rezgésállapota továbbterjed. A mechanikai hullám terjedéséhez tehát szükség van valamilyen anyagra (légüres térben
Mechanikai hullámok Mechanikai hullámnak nevezzük, ha egy anyagban az anyag részecskéinek rezgésállapota továbbterjed. A mechanikai hullám terjedéséhez tehát szükség van valamilyen anyagra (légüres térben
A PPP. a vonatkoztatási rendszer, az elmélet és gyakorlat összefüggése egy Fehérvár környéki kísérleti GNSS-mérés tapasztalatai alapján
 GISopen konferencia, Székesfehérvár, 2017. 04. 11-13. A PPP a vonatkoztatási rendszer, az elmélet és gyakorlat összefüggése egy Fehérvár környéki kísérleti GNSS-mérés tapasztalatai alapján Busics György
GISopen konferencia, Székesfehérvár, 2017. 04. 11-13. A PPP a vonatkoztatási rendszer, az elmélet és gyakorlat összefüggése egy Fehérvár környéki kísérleti GNSS-mérés tapasztalatai alapján Busics György
Bevezetés a méréstechinkába, és jelfeldologzásba jegyzőkönyv
 Bevezetés a méréstechinkába, és jelfeldologzásba jegyzőkönyv Lódi Péter(D1WBA1) Módli Hunor(HHW6Q9) 2015 Április 15. Mérés helye: Mérés ideje: Mérés tárgya: Mérés eszköze: PPKE-ITK 3. emeleti 321-es Mérőlabor,
Bevezetés a méréstechinkába, és jelfeldologzásba jegyzőkönyv Lódi Péter(D1WBA1) Módli Hunor(HHW6Q9) 2015 Április 15. Mérés helye: Mérés ideje: Mérés tárgya: Mérés eszköze: PPKE-ITK 3. emeleti 321-es Mérőlabor,
szló egyetemi tanár, igazgató szségügyi gyi informatikai Workshop Miskolctapolca, 2006. December 11.
 Tóth LászlL szló egyetemi tanár, igazgató Honnan jövünk? j Hol vagyunk? Merre megyünk? Paul GAUGIN, 1897 (Boston, Museum of Fine Arts, 141x376 cm) A tudományban és a technológiában az alapvető fejlődések
Tóth LászlL szló egyetemi tanár, igazgató Honnan jövünk? j Hol vagyunk? Merre megyünk? Paul GAUGIN, 1897 (Boston, Museum of Fine Arts, 141x376 cm) A tudományban és a technológiában az alapvető fejlődések
GPS nyomvonalkövető megvalósítása DSP-n
 GPS nyomvonalkövető megvalósítása DSP-n Készítették: Végh Tamás (KYCG35) Bencze Balázs (WAPUNG) Konzulensek: Molnár Károly Bogár István Nyomvonalkövetés felhasználási lehetőségei Mezőgazdasági alkalmazás
GPS nyomvonalkövető megvalósítása DSP-n Készítették: Végh Tamás (KYCG35) Bencze Balázs (WAPUNG) Konzulensek: Molnár Károly Bogár István Nyomvonalkövetés felhasználási lehetőségei Mezőgazdasági alkalmazás
 FELADATOK A DINAMIKUS METEOROLÓGIÁBÓL 1. A 2 m-es szinten végzett standard meteorológiai mérések szerint a Földön valaha mért második legmagasabb hőmérséklet 57,8 C. Ezt San Luis-ban (Mexikó) 1933 augusztus
FELADATOK A DINAMIKUS METEOROLÓGIÁBÓL 1. A 2 m-es szinten végzett standard meteorológiai mérések szerint a Földön valaha mért második legmagasabb hőmérséklet 57,8 C. Ezt San Luis-ban (Mexikó) 1933 augusztus
Sokkia gyártmányú RTK GPS rendszer
 Sokkia gyártmányú RTK GPS rendszer A leírást készítette: Deákvári József, intézeti mérnök Az FVM Mezőgazdasági Gépesítési Intézet 2005-ben újabb műszerekkel gyarapodott. Beszerzésre került egy Sokkia gyártmányú
Sokkia gyártmányú RTK GPS rendszer A leírást készítette: Deákvári József, intézeti mérnök Az FVM Mezőgazdasági Gépesítési Intézet 2005-ben újabb műszerekkel gyarapodott. Beszerzésre került egy Sokkia gyártmányú
3. Vertikális napóra szerkesztése (2009. September 11., Friday) - Szerzõ: Ponori Thewrewk Aurél
 - Szerzõ: Ponori Thewrewk Aurél") 3. Vertikális napóra szerkesztése (2009. September 11., Friday) - Szerzõ: Ponori Thewrewk Aurél A cikk két olyan eljárást mutat be, amely a függõleges napórák elkészítésében nyújt segítséget. A fal tájolásának
3. Vertikális napóra szerkesztése (2009. September 11., Friday) - Szerzõ: Ponori Thewrewk Aurél A cikk két olyan eljárást mutat be, amely a függõleges napórák elkészítésében nyújt segítséget. A fal tájolásának
A repülős adatbázis 28 napig érvényes és az összes repülőtér információt tartalmazza, navigációs segédinformációkkal és kereszteződés adatokkal.
 Garmin D2 Charlie repülős funkciók leírása A repülési adatbázis frissítése Mielőtt frissíthetné a repülési adatbázist, készítenie kell egy Garmin fiókot, és ahhoz hozzá kell adnia készülékét. A készüléke
Garmin D2 Charlie repülős funkciók leírása A repülési adatbázis frissítése Mielőtt frissíthetné a repülési adatbázist, készítenie kell egy Garmin fiókot, és ahhoz hozzá kell adnia készülékét. A készüléke
FÖLDMÉRÉS ISMERETEK EMELT SZINTŰ ÍRÁSBELI VIZSGA JAVÍTÁSI-ÉRTÉKELÉSI ÚTMUTATÓ A MINTAFELADATOKHOZ
 FÖLDMÉRÉS ISMERETEK EMELT SZINTŰ ÍRÁSBELI VIZSGA JAVÍTÁSI-ÉRTÉKELÉSI ÚTMUTATÓ A MINTAFELADATOKHOZ 1 / 6 feladatlap Elméleti szöveges feladatok 1. Egészítse ki az alábbi szöveget a Glonassz GNSS alaprendszerrel
FÖLDMÉRÉS ISMERETEK EMELT SZINTŰ ÍRÁSBELI VIZSGA JAVÍTÁSI-ÉRTÉKELÉSI ÚTMUTATÓ A MINTAFELADATOKHOZ 1 / 6 feladatlap Elméleti szöveges feladatok 1. Egészítse ki az alábbi szöveget a Glonassz GNSS alaprendszerrel
A valós idejű, térinformatikai célú műholdas helymeghat{roz{s a barlangkataszterben
 A valós idejű, térinformatikai célú műholdas helymeghat{roz{s a barlangkataszterben Megfelelni az új kihívásoknak*gisopen-konferencia, 2011, Tarsoly Péter Bevezető A GNSS technológiák mára széles körben
A valós idejű, térinformatikai célú műholdas helymeghat{roz{s a barlangkataszterben Megfelelni az új kihívásoknak*gisopen-konferencia, 2011, Tarsoly Péter Bevezető A GNSS technológiák mára széles körben
I. Telematikai rendszerek
 I. Telematikai rendszerek Telekommunikáció+Informatika=TeleMatika TRACKING & TRACING - áru és jármű nyomon követés, útvonaltervezés TRANSZPONDERES azonosítás veszélyes, romlandó áruk kezelése NAVIGÁCIÓ
I. Telematikai rendszerek Telekommunikáció+Informatika=TeleMatika TRACKING & TRACING - áru és jármű nyomon követés, útvonaltervezés TRANSZPONDERES azonosítás veszélyes, romlandó áruk kezelése NAVIGÁCIÓ
Érettségi feladatok: Trigonometria 1 /6
 Érettségi feladatok: Trigonometria 1 /6 2003. Próba 14. Egy hajó a Csendes-óceán egy szigetéről elindulva 40 perc alatt 24 km-t haladt észak felé, majd az eredeti haladási irányhoz képest 65 -ot nyugat
Érettségi feladatok: Trigonometria 1 /6 2003. Próba 14. Egy hajó a Csendes-óceán egy szigetéről elindulva 40 perc alatt 24 km-t haladt észak felé, majd az eredeti haladási irányhoz képest 65 -ot nyugat
MATEMATIKA HETI 5 ÓRA. IDŐPONT: 2010. Június 4.
 EURÓPAI ÉRETTSÉGI 2010 MATEMATIKA HETI 5 ÓRA IDŐPONT: 2010. Június 4. A VIZSGA IDŐTARTAMA: 4 óra (240 perc) ENGEDÉLYEZETT SEGÉDESZKÖZÖK : Európai képletgyűjtemény Nem programozható, nem grafikus kalkulátor
EURÓPAI ÉRETTSÉGI 2010 MATEMATIKA HETI 5 ÓRA IDŐPONT: 2010. Június 4. A VIZSGA IDŐTARTAMA: 4 óra (240 perc) ENGEDÉLYEZETT SEGÉDESZKÖZÖK : Európai képletgyűjtemény Nem programozható, nem grafikus kalkulátor
GPS-mérések abszolút feldolgozását terhelô hibahatások vizsgálata
 GPS-mérések abszolút feldolgozását terhelô hibahatások vizsgálata TAKÁCS BENCE egyetemi tanársegéd BME Általános- és Felsôgeodézia Tanszék, bence@agt.bme.hu Reviewed Kulcsszavak: abszolút helymeghatározás,
GPS-mérések abszolút feldolgozását terhelô hibahatások vizsgálata TAKÁCS BENCE egyetemi tanársegéd BME Általános- és Felsôgeodézia Tanszék, bence@agt.bme.hu Reviewed Kulcsszavak: abszolút helymeghatározás,
8X22 GPS SOLAR HASZNÁLATI ÚTMUTATÓ
 8X22 GPS SOLAR HASZNÁLATI ÚTMUTATÓ Tartalom 1. Jellemzők... 2 2. Az óra részei... 3 3. A töltés állapotának ellenőrzése... 4 A GPS vételek jele aktív... 4 A GPS vételek jele inaktív... 5 4. Időzóna beállítás...
8X22 GPS SOLAR HASZNÁLATI ÚTMUTATÓ Tartalom 1. Jellemzők... 2 2. Az óra részei... 3 3. A töltés állapotának ellenőrzése... 4 A GPS vételek jele aktív... 4 A GPS vételek jele inaktív... 5 4. Időzóna beállítás...
FIZIKA JAVÍTÁSI-ÉRTÉKELÉSI ÚTMUTATÓ
 Fizika középszint ÉRETTSÉGI VIZSGA 0. október 7. FIZIKA KÖZÉPSZINTŰ ÍRÁSBELI ÉRETTSÉGI VIZSGA JAVÍTÁSI-ÉRTÉKELÉSI ÚTMUTATÓ NEMZETI ERŐFORRÁS MINISZTÉRIUM A dolgozatokat az útmutató utasításai szerint,
Fizika középszint ÉRETTSÉGI VIZSGA 0. október 7. FIZIKA KÖZÉPSZINTŰ ÍRÁSBELI ÉRETTSÉGI VIZSGA JAVÍTÁSI-ÉRTÉKELÉSI ÚTMUTATÓ NEMZETI ERŐFORRÁS MINISZTÉRIUM A dolgozatokat az útmutató utasításai szerint,
8x53 GPS Solar HASZNÁLATI ÚTMUTATÓ
 8x53 GPS Solar HASZNÁLATI ÚTMUTATÓ Tartalom 1.Jellemzők... 2 2. Az óra részei... 3 3. A töltés állapotának ellenőrzése... 4 4. Időzóna beállítás... 5 5. Időzóna kézi beállítása a fő számlapon... 6 6. Időzóna
8x53 GPS Solar HASZNÁLATI ÚTMUTATÓ Tartalom 1.Jellemzők... 2 2. Az óra részei... 3 3. A töltés állapotának ellenőrzése... 4 4. Időzóna beállítás... 5 5. Időzóna kézi beállítása a fő számlapon... 6 6. Időzóna
VÁNDORGYŰLÉS július 6-8.
 MFTTT, 31. VÁNDORGYŰLÉS 2017. július 6-8. Az új technológiák és a szervezeti változások hatása a magyar földmérésre és térképészetre 3D GEOSOLUTIONS HUNGARY KFT Váradi Attila: Trimble HD-GNSS-től az RTX
MFTTT, 31. VÁNDORGYŰLÉS 2017. július 6-8. Az új technológiák és a szervezeti változások hatása a magyar földmérésre és térképészetre 3D GEOSOLUTIONS HUNGARY KFT Váradi Attila: Trimble HD-GNSS-től az RTX
ROVER. Felhasználói kézikönyv V 1.0
 ROVER Felhasználói kézikönyv V 1.0 1. Bevezetés A North Edge Rover egy GPS egységgel szerelt multifunkciós, szabadidős karóra, mely számos helyzetben hasznos társa lehet! 2. Funkciók Automatikus napi szinkronizálás
ROVER Felhasználói kézikönyv V 1.0 1. Bevezetés A North Edge Rover egy GPS egységgel szerelt multifunkciós, szabadidős karóra, mely számos helyzetben hasznos társa lehet! 2. Funkciók Automatikus napi szinkronizálás
BAGME11NNF Munkavédelmi mérnökasszisztens Galla Jánosné, 2011.
 BAGME11NNF Munkavédelmi mérnökasszisztens Galla Jánosné, 2011. 1 Mérési hibák súlya és szerepe a mérési eredményben A mérési hibák csoportosítása A hiba rendűsége Mérési bizonytalanság Standard és kiterjesztett
BAGME11NNF Munkavédelmi mérnökasszisztens Galla Jánosné, 2011. 1 Mérési hibák súlya és szerepe a mérési eredményben A mérési hibák csoportosítása A hiba rendűsége Mérési bizonytalanság Standard és kiterjesztett
2011. május 19., Budapest UWB ÁTTEKINTÉS
 2011. május 19., Budapest UWB ÁTTEKINTÉS Mi az UWB? Hot new topic. Más elnevezések: impulzus rádió, alapsávi rádió, vivő- mentes rádió. Az USA védelmi minisztériuma használta először az UWB elnevezést
2011. május 19., Budapest UWB ÁTTEKINTÉS Mi az UWB? Hot new topic. Más elnevezések: impulzus rádió, alapsávi rádió, vivő- mentes rádió. Az USA védelmi minisztériuma használta először az UWB elnevezést