Mőholdas helymeghatározás
|
|
|
- Diána Nemesné
- 6 évvel ezelőtt
- Látták:
Átírás
1 Mőholdas helymeghatározás Szatmári József Szegedi Tudományegyetem Természeti Földrajzi és Geoinformatikai Tanszék
2 Tájékozódás a Földön Global Positioning System: a nagy ötlet Néhány alaptétel GPS vevık típusai, mérési technikák GNSS - jelen és jövı Földtudományi alkalmazások
3 Ajánlott irodalom Bányai L.: Geomatika

4 Helymeghatározás: trükkös tudomány Az alapvetı tájékozódás általában mindenkinek jól megy pl. az utcán. A jellemzı tájékozódási pontokat használjuk A pontos navigáció elıször csak a szakemberek kiváltsága volt A probléma elsısorban a tengereken jelentkezett: kevés a tájékozódási pont Manapság már létszükséglet a levegıben, a bedugult városokban
 SatNav GPS")
5 Új technológia: mindig újabb kétségek Csillagok útján Égi tájékozódás olcsó, de kevésbé pontos tapasztalat kell hozzá, fáradságos, idıjárásfüggı TRANSIT tengerészeti alkalmazás, ~1 m pontosság, 1994-ig LORAN C repülıgép-, autónavigáció pontos, megbízható korlátozott lefedettség (5 %) SatNav GPS (1972-)
6 NAVSTAR GPS Folyamatosan mőhold üzemel URA 90-es években: 4,6 m 2005-ben: 1,1 m (a célkitőzés 1,2 m volt) Az elsı Block IIR-M mőhold indítása 2005 okt.-ben (sikeres volt) L2c, L1M és L2M, Anti Jam Block IIF holdak 2007-tıl Mint a korábbiak, plusz: harmadik C/A az L5-ön (L5c) Block III holdak legkorábban 2013-tól sok minden, plusz 4. polgári frekvencia info@3tc.hu

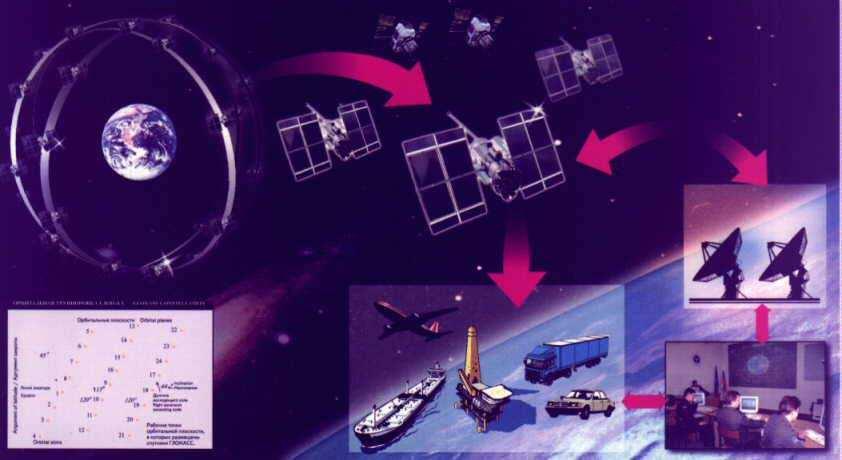
7 Mőholdas rendszerek + (nem GPS) GLONASS (GLObal NAvigation Satellite System) Russian Federation Government - Russian Space Forces 24 mőhold: 3 pályán (120º-os szögben) 8-8 mőhold 45º-os eltéréssel Pálya: cirkuláris (64.8º inklináció), magasság: km Periódusidı: 11 h 15 min Minimum 5 hold látszik a Föld bármely pontjáról Bei Dou (Kína) GALILEO (EU)
8
9 Mi a GPS? Szuper pontos rendszer US DoD 1972-ben határozta el a kiépítését Mőhold-alapú Katonai (nukleáris tengeralattjárók, célravezetés, stb.), majd polgári alkalmazások Föld minden pontján használható
10 Mőhold-alapú Háromszögelés mőholdadatok alapján 24 mőhold a teljes kiépítésben 21 aktív, 3 tartalék mőhold Nagy pályamagasság: km pontosság, kisebb interferencia nagyobb élettartam teljes lefedettség Technológiai fejlettség tette lehetıvé: őr~ informatikai~ (idı)mérési~

11 NAVSTAR mőholdak Gyártó: Rockwell International Pályamagasság: km Pályainklináció: 55º 24 mőhold 6 pályán Periódusidı: 12 h
12 Mennyire pontos? Attól függ, vagyis mitıl? Mérésre fordított idıtartamtól Vevı típusától Mőholdak konstellációjától Sub-cm (centiméter alatti) geodéziai célú termékeknél Sub-m (méter alatti) differenciális technikával Kb. 20 m alatti bármely kézi vevıvel US DoD bármikor korlátozhatja az elérést, ronthatja a pontosságot!

13 Hogy mőködik a GPS? GPS 5 lépésben Távolságmérés GPS-szel ismerve a fénysebességet A mérésekhez pontos órák és trükkök kellenek A távolságmérés után a mőholdak helyzetét kell ismernünk Ionoszférikus és atmoszférikus hibák korrekciója A rendszer alapja: mőholdas háromszögelés
14 1 Háromszögelés mőholdakkal A mőholdaktól mért távolság alapján trigonometriai összefüggésekbıl számolhatjuk a pozíciónkat Pozíció? Mi az? Állj!

15
16 Háromszögelés Egy mérés a lehetséges pozícióinkat egy gömbfelületre szőkiti le km
17 Háromszögelés A második méréssel a lehetséges pozícióinkat két gömbfelület metszetére szőkitjük le km Két gömbfelület metszete egy körvonal km
18 Háromszögelés A harmadik mérés a lehetséges pozícióinkat két pontra szőkiti le km Három gömbfelület metszete két pont km km
19 Háromszögelés A negyedik mérés dönt A negyedik mérés gömbfelületének csak az egyik ponttal lesz metszete.
20 Háromszögelés Praktikusan 3 mérés elegendı Az egyik pontot ki lehet zárni, mint valós pozíciót: valahol az őrben van vagy nagy sebességgel mozog DE késıbb részletezendı mőszaki okokból szükségünk van a 4. mérésre is
21 2 Mőholdak bemérése A mőholdtól való távolság = d (m) meghatározása Rádióhullámok haladási idejének mérésével történik: mennyi ideig tart, míg a GPS jel elér hozzánk = t (s)? Rádióhullám terjedési sebessége = fénysebesség d (m) = t(s) x 3x10 8 (m/s) Ha van egy jó óránk, akkor csak azt kell tudnunk, hogy mikor indult el a jel a mőholdról!
22 Honnan tudjuk, hogy mikor indult el a jel a mőholdról? A GPS egyik Nagy Okos Ötlete: A mőhold (adó) és a GPS (vevı) ugyanazt a kódot használja A mőhold és a vevı egymással szinkronban, egyidıben ugyanazt a kódot generálja A mőholdról beérkezett kód alapján meghatározható, hogy a vevı mennyi idıvel azelıtt generálta ugyanazt a kódot mőholdról földi GPS vevırıl idıkülönbség mérése a megegyezı kódszakaszok között
23 Miért kódot használnak a rendszerben? A kód lehetıvé teszi a rendszerbe való beugrást bárhol, bármikor Számos mőhold mőködhet ugyanazon a frekvencián Kódmérés: mőhold-vevı teljes távolság mérhetı
24 Kódmérés P kód, C/A kód GPS mőholdak két jelet sugároznak: L1= MHz és a L2= MHz vivıhullám hosszakon L1 és L2 modulált a P (precision) kóddal: 30 m hullámhossz (nagyobb pontosság) L1 modulált a C/A (coarse/acquisition - durva/elérés) kóddal: 300 m hosszú (kisebb pontosság) C/A kód: véletlen kód, zérusokból és egyesekbıl áll egy elem frekvenciája: υ=1.023 MHz, a kód 1023 bit hosszú idıben kifejezve: egy elem 1 mikroszekundumnak ( mp-nek) felel meg a teljes kód 1 milliszekundumnak (0.001 mp-nek) felel meg egy elem hossza: λ=c/υ= *10 8 * *10-6 = m az egész kódsorozat hossza: *1023 m = m C/A kód: pszeudo véletlen kód
 = n * teljes kódhossz ± 4 * adatbit")
25 Pszeudo véletlen kód A késés számítása a jel terjedési idejébıl Mőholdról A saját vevırıl Ha 4 kóddal léptetjük, szinkronban leszünk a mőholddal: d (m) = n * teljes kódhossz ± 4 * adatbit hossza
 1000-szerese a kódfrekvenciának pontosság növekedése is 1000-szeres Jelkiértékelés mm-es pontossággal: minıségi vevık pontossága a")
26 Vivıfázis-mérés A pontosságnak ára van! Vivıjel frekvenciája (L1 : 19,05 cm; L2 : 24,45 cm) 1000-szerese a kódfrekvenciának pontosság növekedése is 1000-szeres Jelkiértékelés mm-es pontossággal: minıségi vevık pontossága a hullámhosz kb. 1 %-a Probléma: egész periódusok száma nem ismert (fázis többértelmőség) Megoldás: matematikai modell (szoftver függı), kétfrekvenciás vevık
27 3 Idımérés: Pontos órák szükségesek! Biztosítani kell, hogy a vevı és a mőhold egyidıben indítsa el e kódot A teljes rendszer nagyon pontos órákon és idımérésen alapul A mőholdakon atomórákat helyeztek el pontosságuk meghaladja nanosecundum-ot (10-9 sec) nagyon drágák A vevıkben elegendı konzisztens óraszerkezetet és egy kis cselt alkalmazni a digitális órák konzisztensek, megfelelnek a célnak az abszolút pontosság nem szükséges, csak egy kis geometriai trükk a titok egy extra mérés, amellyel kiküszöbölhetı a vevı órájának pontatlanságából adódó hiba

28 Az ideális eset (pontos órával) 2D-ban az ábrázolás miatt A valós pozíciónk itt található

29 Ha az óra siet Hibás pozíció, mert az óra 1 másodpercet siet

30 Harmadik mérés (pontos órával) A harmadik mérés áthaladna a pozíción, ha az idımérés pontos lenne

31 Harmadik mérés (ha az óra siet) A harmadik mérés nem megy át az elsı két mérés metszetén dt dt dt Nem kapjuk meg a helyes pozíciót
32 Extra mérés Vevı felépítése 4 mérés szükséges a valós 3D helyzetben Ez azt jelenti, hogy egyszerre legalább 4 mőhold jelének vétele elengedhetetlen a helymeghatározáshoz Azaz legalább 4 csatornával kell rendelkeznie a vevınek a pozícionáláshoz Legalább 2 csatornával a sebesség meghatározásához
33 4 És merre járnak a mőholdak? Mint tudjuk, kb km-re fent az égbolton Nagy pályamagasság precíz beállítások nagyon stabil, szimmetrikus nincs atmoszférikus közegellenállás A US DoD ellenırzése alatt ezért nem geoszinkron pálya - naponta kétszer haladnak el a US területe fölött DoD percenként sugároz korrekciós adatokat a holdakra A korrekciókat a mőholdakról kapják a felhasználók status message
34 Status message
35 5 Atmoszférikus és ionoszférikus korrekciók Sajnos nem vákumban dolgozik a rendszer Ionoszféra: befogott részecskék övezete különbözı késleltetéseket okoz a rádióhullámok terjedésében korrekció: modellek, kétfrekvenciás mód Atmoszféra: a felhık öve a vízgız befolyásolja a jelek terjedését nincs igazán jó módszer önmagában a jelek korrekciójára szerencsére nem túl jelentıs a zavaró hatása
36 Egyéb hibaforrások (véletlen zaj, szabályos, durva) Atomóra hibái csekély mértékő, DoD korrigálja Vevık hibái hardver, szoftver Többszörös út interferencia tereptárgyakról visszaverıdı jelek a fejlett vevık jó antennával és szoftverrel rendelkeznek Pályahibák
37 GDOP Geometric Dilution of Precision A mőholdak egymáshoz viszonyított helyzete is befolyásolja a pontosságot Ideális helyzet

38 GDOP Geometric Dilution of Precision Valós helyzet - Fuzzy körök bizonytalanság bizonytalanság Pontnak vélt pozíció valójában egy terület

39 GDOP Geometric Dilution of Precision Fuzzy körök - kisebb szögnél még nagyobb hiba A terület növekedik,ha a mőholdak közelednek egymáshoz
 Helymeghatározás Pontossága = DOP * mérési pontosság Példa: tfh. a mérési pontosság 1 méter. Ha DOP=1, akkor a pozíció pontossága szintén 1 méter.")
40 GDOP, PDOP, Nsats És még HDOP, VDOP GDOP: Geometric Dilution of Precision PDOP: Position Dilution of Precision HDOP: Horizontal Dilution of Precision VDOP: Vertical Dilution of Precision Nsats: Number of SVs (satellite vehicle) Helymeghatározás Pontossága = DOP * mérési pontosság Példa: tfh. a mérési pontosság 1 méter. Ha DOP=1, akkor a pozíció pontossága szintén 1 méter. Mi történik, ha a DOP=5? A helymeghatározás pontossága 5 méterre romlik, azaz a legjobb mérési eredmény elérése érdekében mindig meg kell tervezni a napi mérést a mőholdak áthaladási rendjének ismeretében (mission planning)!
41 Szelektív elérhetıség S/A Az eredeti katonai célokkal összhangban a DoD a szelektív elérhetıség (selective availability, röviden SA) politikáját gyakorolja, ami azt jelenti hogy esetenként (pld. az öbölháború idején) korlátozza a teljes rendszer használatát a polgári alkalmazóknak. Gyakorlatilag ez korábban úgy történt, hogy csonkolták azokat az üzeneteket, melyek a mőhold koordinátáit továbbítják a vevıknek. A C/A kódra mőholdanként változó, alacsony frekvenciás (hosszú idı alatt ismétlıdı) torzítást visznek, mely az eredeti 30 m-es pontosságot 100 m. körülire csökkenti. S/A kikapcsolva: május 1. (B. Clinton elnök határozata)

42 Hibaforrások, pontosság GPS pontossága, tipikus hibák méterben
43 GPS vevık, mérési technikák Abszolút és relatív helymeghatározás 1. Abszolút (navigációs): kódmérés egyetlen vevıvel XYZ térbeli derékszögő koordináták, vagy ϕλh földrajzi koordinátákat eredményez hiba: méter 2. Relatív (térinformatikai, geodéziai): két vevıvel, egyidejő kód-, vagy fázisméréssel két pont közötti relatív térbeli távolság x, y, z összetevıit adja geodéziai pontossághoz: relatív fázismérés
44 FÁZISMÉRÉS KÓDMÉRÉS DIFFERENCIÁLIS ABSZOLÚT STATIKUS RTK DGPS ABSZ mm cm m
45 GPS vevık, mérési technikák Kiértékelés 1. Valós idejő (real time) DGPS: valós idejő, relatív, kódmérés, mőholdas (SBAS), vagy földi (GBAS) referencia-állomás adataival RTK: valós idejő, relatív, fázismérés, földi referenciaállomás adataival 2. Utófeldolgozással (post processing)

46
 mozdulatlan vevıkkel 2.")
47 GPS vevık, mérési technikák Statikus, kinematikus 1. Statikus: (mérés közben) mozdulatlan vevıkkel 2. Kinematikus: mozgó vevıvel Relatív kinematikus Real Time Kinematikus (RTK)




48 Navigációs mérés Útkeresés kézi vevıvel pillanatnyi helyzet meghatározása célpont felkeresése: waypoints vízszintes pontosság: max m magasságmérés pontossága: bizonytalan, javítás: pl. barométer + kalibrálás kijelzés: általában földrajzi, de lehet geocentrikus is (EOV) laptop csatlakozás pocket PC
 korrekciós adatait használja (50 km-es körzetben) pontosság:")
49 Diffrenciális GPS (DGPS) Múlt és jövı? valós idejő, relatív, kódmérés referencia-állomás (bázis) korrekciós adatait használja (50 km-es körzetben) pontosság: szubméter mozgó (rover) vevı a korrekciós adatokkal javítja saját méréseit bázis rover

50 Aktív hálózat Jelen, Jövı? permanens állomások: aktív hálózat

51




52 KECSKEMÉT GPS REFERENCIA ÁLLOMÁS KECS
53 Statikus GPS mérés Türelem és pontosság mozdulatlan vevık közötti térbeli vektorok meghatározása fázisméréssel térbeli vektorokból térbeli hálózat: kiegyenlíthetı (fix pontokra) több 10 km több 1000 km-es vektorok mérhetık cm pontossággal minél nagyobb a vektor, annál hosszabb mérési idı (atmoszférikus hatások kiküszöbölésére) és speciálisabb vevı szükséges 15 km-nél rövidebb vektorok: gyors statikus (rapid static) technikával (~10 perc) mérési idı egyre rövidül a rendszer és a feldolgozó szoftverek fejlıdésével



54 Statikus GPS mérés
55 Kinematikus GPS mérés Folyamatos kinematikus és Stop and Go ismert ponton elhelyezett vevıhöz képest mérjük a pozíciót Folyamatos: mozgó vevı (jármő) útvonalát rögzítjük fázisméréssel Stop and Go: terepen kijelölt pontokon rövid ideig (néhány epocha) mérünk folyamatos jelvétel szükséges fázismérés: statikus inicializálás (periódusszám felvétele) szükséges az elsı ponton korszerő megoldás: menet közbeni inicializálás (OTF), szakadások megengedettek a jelvételben (zavaró tereptárgyak) referenciaállomás max km-re lehet feldolgozás: utólagos
56 Valós idejő kinematikus (RTK) mérés Geodéziai pontosság, felmérés, pontkitőzés technika: meegyezik a kinematikus mérésével feldolgozás: egyidejőleg a méréssel referencia-adatokat rádión közvetítik a mozgó vevıhöz mérés jósága azonnal (1-2 perc) ellenırizhetı hatótávolság: 5-10 km geodéziai célokra legmagasabb árak rádiófrekvencia használatához engedély szükséges AKTÍV GNSS hálózat

57 A JELEN és JÖVİ: A GNSS és?

58 GALILEO 2013! Újraindítás:

59 GALILEO : 2 db. mőhold
60 GPS földtudományi alkalmazásai
61

62

63
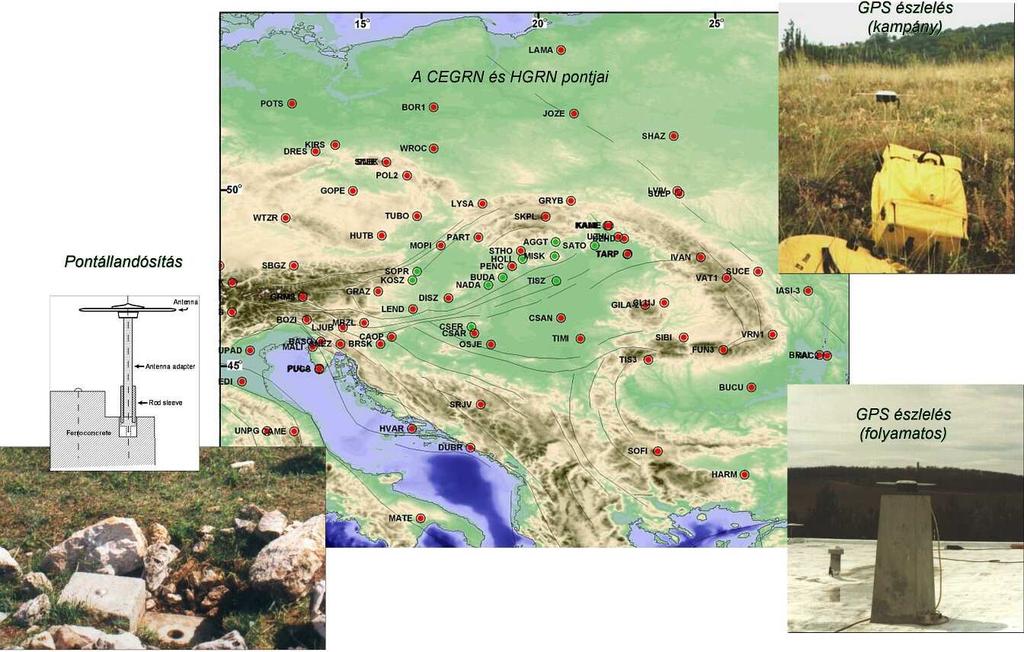
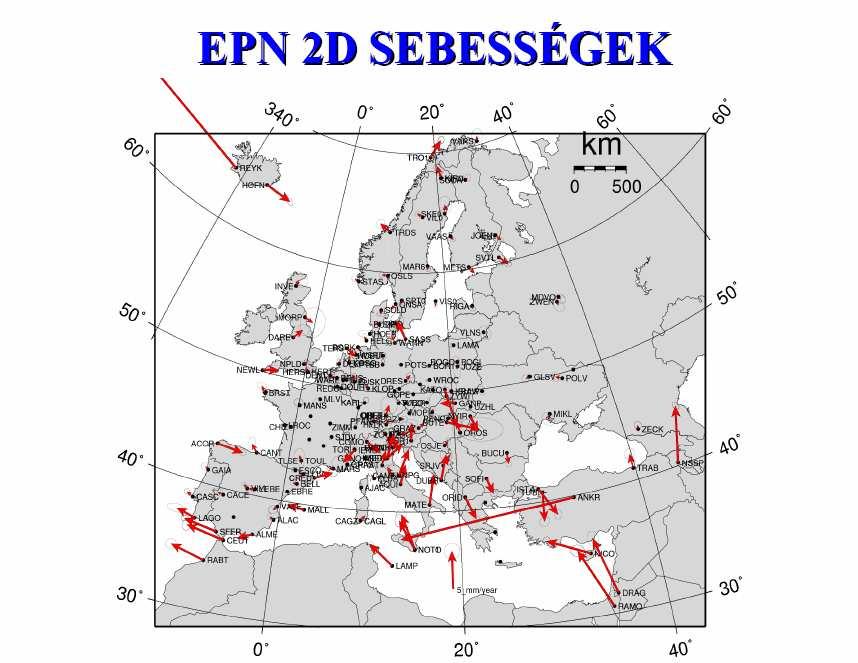
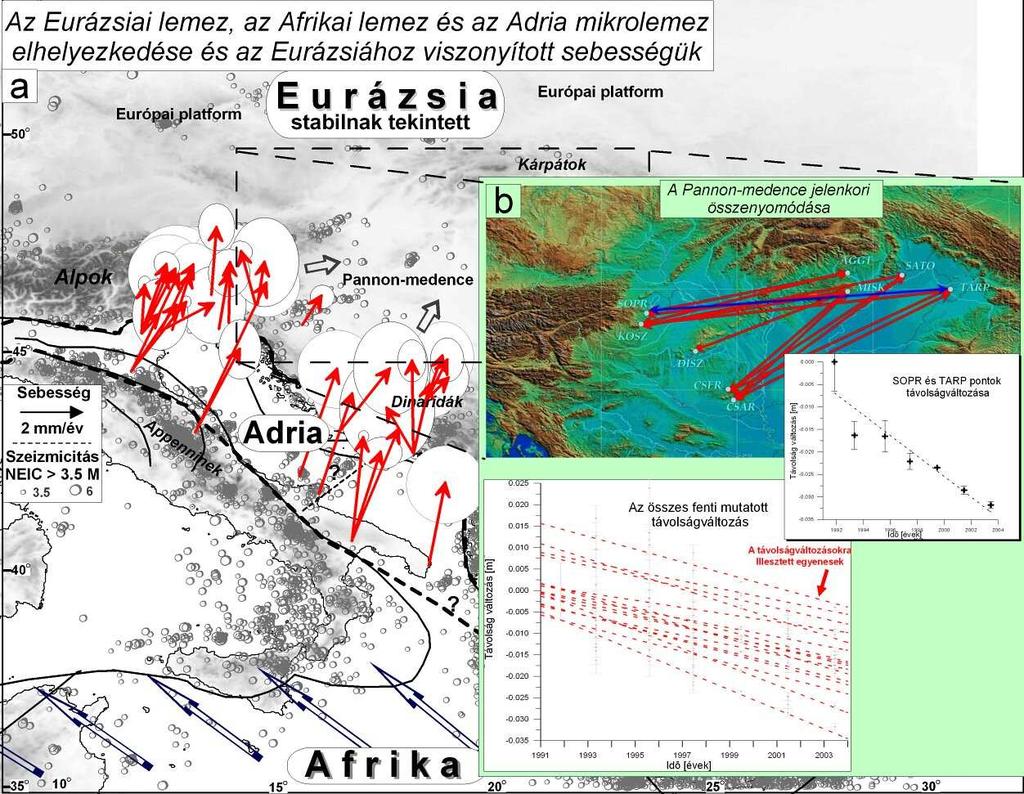
64 GPS mozgásvizsgálatok
65 GPS mozgásvizsgálati program alappontjai
66


67 GPS a korszerő földtani térképezésben Global Positioning System GPS
68 GPS a korszerő földtani térképezésben A térképezés módszereinek korszerősítése A legfontosabb módszer-korszerősítési tényezık a számítástechnikai és őrkutatási eredmények alkalmazásából, azok logikus és célszerő összefőzésébıl erednek: Globális helyzetmeghatározás Távérzékelés és LFK értelmezés Adatbázisok helyszíni építése Térinformatikai rendszerek felépítése Primer adatok: A megfigyelés helye Azonosítója Földtani megfigyelések Mintavételek

69 GPS a korszerő földtani térképezésben A terepi megfigyelések topográfiai bekötésének megkívánt pontossága az 1: es méretarányban ~ 5 m, ami a méretarány csökkenésével nı A kézi GPS vevık valós idejő mérési pontossága megfelel a pontossági követelményeknek Az észlelési pontok bemérése a kézi GPS vevık valós idejő mérési adataival felgyorsul és megbízhatóvá válik
TestLine - nummulites_gnss Minta feladatsor
 1.* Egy műholdas helymeghatározás lehet egyszerre abszolút és kinematikus. 2.* műholdak pillanatnyi helyzetéből és a megmért távolságokból számítható a vevő pozíciója. 3.* 0:55 Nehéz kinai BEIDOU, az amerikai
1.* Egy műholdas helymeghatározás lehet egyszerre abszolút és kinematikus. 2.* műholdak pillanatnyi helyzetéből és a megmért távolságokból számítható a vevő pozíciója. 3.* 0:55 Nehéz kinai BEIDOU, az amerikai
Kincskeresés GPS-el: a korszerű navigáció alapjai
 2007. február 22. : a korszerű navigáció alapjai Kovács Béla Térképtudományi és Geoinformatikai Tanszék Eötvös Loránd Tudományegyetem, Informatika Kar Térképtudományi és Geoinformatikai Tanszék 1117 Budapest,
2007. február 22. : a korszerű navigáció alapjai Kovács Béla Térképtudományi és Geoinformatikai Tanszék Eötvös Loránd Tudományegyetem, Informatika Kar Térképtudományi és Geoinformatikai Tanszék 1117 Budapest,
Hegyi Ádám István ELTE, április 25.
 Hegyi Ádám István ELTE, 2012. április 25. GPS = Global Positioning System Department of Defense = Amerikai Egyesült Államok Védelmi Minisztériuma 1973 DNSS = Defense Navigation Satellite System vagy Navstar-GPS
Hegyi Ádám István ELTE, 2012. április 25. GPS = Global Positioning System Department of Defense = Amerikai Egyesült Államok Védelmi Minisztériuma 1973 DNSS = Defense Navigation Satellite System vagy Navstar-GPS
2007. március 23. INFO SAVARIA 2007. GNSS alapok. Eötvös Loránd Tudományegyetem, Informatika Kar. Térképtudományi és Geoinformatikai Tanszék
 2007. március 23. INFO SAVARIA 2007 GPS/GNSS GNSS alapok Kovács Béla Térképtudományi és Geoinformatikai Tanszék Eötvös Loránd Tudományegyetem, Informatika Kar Térképtudományi és Geoinformatikai Tanszék
2007. március 23. INFO SAVARIA 2007 GPS/GNSS GNSS alapok Kovács Béla Térképtudományi és Geoinformatikai Tanszék Eötvös Loránd Tudományegyetem, Informatika Kar Térképtudományi és Geoinformatikai Tanszék
INFORMATIKA ÁGAZATI ALKALMAZÁSAI. Az Agrármérnöki MSc szak tananyagfejlesztése TÁMOP-4.1.2-08/1/A-2009-0010
 INFORMATIKA ÁGAZATI ALKALMAZÁSAI Az Agrármérnöki MSc szak tananyagfejlesztése TÁMOP-4.1.2-08/1/A-2009-0010 13. GNSS mérés tervezése, végrehajtása Tervezés célja, eszközei, almanach GNSS tervező szoftverek
INFORMATIKA ÁGAZATI ALKALMAZÁSAI Az Agrármérnöki MSc szak tananyagfejlesztése TÁMOP-4.1.2-08/1/A-2009-0010 13. GNSS mérés tervezése, végrehajtása Tervezés célja, eszközei, almanach GNSS tervező szoftverek
INFORMATIKA ÁGAZATI ALKALMAZÁSAI. Az Agrármérnöki MSc szak tananyagfejlesztése TÁMOP-4.1.2-08/1/A-2009-0010
 INFORMATIKA ÁGAZATI ALKALMAZÁSAI Az Agrármérnöki MSc szak tananyagfejlesztése TÁMOP-4.1.2-08/1/A-2009-0010 10. GPS, GPRS (mobilkommunikációs) ismeretek Helymeghatározás GPS rendszer alapelve GNSS rendszerek
INFORMATIKA ÁGAZATI ALKALMAZÁSAI Az Agrármérnöki MSc szak tananyagfejlesztése TÁMOP-4.1.2-08/1/A-2009-0010 10. GPS, GPRS (mobilkommunikációs) ismeretek Helymeghatározás GPS rendszer alapelve GNSS rendszerek
A GNSS infrastruktúrára támaszkodó műholdas helymeghatározás. Borza Tibor (FÖMI KGO) Busics György (NyME GEO)
 Busics György (NyME GEO)") A GNSS infrastruktúrára támaszkodó műholdas helymeghatározás Borza Tibor (FÖMI KGO) Busics György (NyME GEO) Tartalom Mi a GNSS, a GNSS infrastruktúra? Melyek az infrastruktúra szintjei? Mi a hazai helyzet?
A GNSS infrastruktúrára támaszkodó műholdas helymeghatározás Borza Tibor (FÖMI KGO) Busics György (NyME GEO) Tartalom Mi a GNSS, a GNSS infrastruktúra? Melyek az infrastruktúra szintjei? Mi a hazai helyzet?
Alapok GPS előzmnyei Navstar How the GPS locate the position Tények Q/A GPS. Varsányi Péter
 Alapok előzmnyei Navstar How the locate the position Tények Q/A Óbudai Egyetem Alba Regia Egyetemi Központ (AREK) Székesfehérvár 2011. december 8. Alapok előzmnyei Navstar How the locate the position Tények
Alapok előzmnyei Navstar How the locate the position Tények Q/A Óbudai Egyetem Alba Regia Egyetemi Központ (AREK) Székesfehérvár 2011. december 8. Alapok előzmnyei Navstar How the locate the position Tények
Globális mőholdas navigációs rendszerek
 Globális mőholdas navigációs rendszerek Oktatási segédanyag a vadgazda MSc levelezı hallgatók számára az EG520 Geomatikai és térinformatikai ismeretek címő tárgyhoz Készítette: Bazsó Tamás Kiegészítette:
Globális mőholdas navigációs rendszerek Oktatási segédanyag a vadgazda MSc levelezı hallgatók számára az EG520 Geomatikai és térinformatikai ismeretek címő tárgyhoz Készítette: Bazsó Tamás Kiegészítette:
Interferencia jelenségek a BME permanens állomásán
 Interferencia jelenségek a BME permanens állomásán Takács Bence, egyetemi docens takacs.bence@epito.bme.hu Rédey szeminárium 2017. március 3. Nagy teljesítményű blokkolók hatótávolság : 200 km adó teljesítmény
Interferencia jelenségek a BME permanens állomásán Takács Bence, egyetemi docens takacs.bence@epito.bme.hu Rédey szeminárium 2017. március 3. Nagy teljesítményű blokkolók hatótávolság : 200 km adó teljesítmény
A GPS pozíciók pontosításának lehetőségei
 A GPS pozíciók pontosításának lehetőségei GIS OPEN 2005 Bartha Csaba csaba.bartha@geopro.hu Milyen fogalmakkal találkozunk? VRS GPS FKP EGNOS DGPS RTCM OGPSH GLONASS WAAS RTK STATIKUS GSM KINEMATIKUS URH
A GPS pozíciók pontosításának lehetőségei GIS OPEN 2005 Bartha Csaba csaba.bartha@geopro.hu Milyen fogalmakkal találkozunk? VRS GPS FKP EGNOS DGPS RTCM OGPSH GLONASS WAAS RTK STATIKUS GSM KINEMATIKUS URH
Mobil térinformatikai feladatmegoldások támogatása GNSS szolgáltatással
 Mobil térinformatikai feladatmegoldások támogatása GNSS szolgáltatással Horváth Tamás FÖMI Kozmikus Geodéziai Obszervatórium horvath@gnssnet.hu www.gnssnet.hu Tel.: 06-27-200-930 Mobil: 06-30-867-2570
Mobil térinformatikai feladatmegoldások támogatása GNSS szolgáltatással Horváth Tamás FÖMI Kozmikus Geodéziai Obszervatórium horvath@gnssnet.hu www.gnssnet.hu Tel.: 06-27-200-930 Mobil: 06-30-867-2570
Hol tart a GNSS állapot-tér modellezés bevezetése?
 Hol tart a GNSS állapot-tér modellezés bevezetése? Horváth Tamás FÖMI Kozmikus Geodéziai Obszervatórium horvath@gnssnet.hu www.gnssnet.hu Tel: +36-27-374-980, Mobil: +36-30-867-2570 Rédey István Geodéziai
Hol tart a GNSS állapot-tér modellezés bevezetése? Horváth Tamás FÖMI Kozmikus Geodéziai Obszervatórium horvath@gnssnet.hu www.gnssnet.hu Tel: +36-27-374-980, Mobil: +36-30-867-2570 Rédey István Geodéziai
A PPP. a vonatkoztatási rendszer, az elmélet és gyakorlat összefüggése egy Fehérvár környéki kísérleti GNSS-mérés tapasztalatai alapján
 GISopen konferencia, Székesfehérvár, 2017. 04. 11-13. A PPP a vonatkoztatási rendszer, az elmélet és gyakorlat összefüggése egy Fehérvár környéki kísérleti GNSS-mérés tapasztalatai alapján Busics György
GISopen konferencia, Székesfehérvár, 2017. 04. 11-13. A PPP a vonatkoztatási rendszer, az elmélet és gyakorlat összefüggése egy Fehérvár környéki kísérleti GNSS-mérés tapasztalatai alapján Busics György
HÍRADÁSTECHNIKA I. Dr.Varga Péter János
 6. HÍRADÁSTECHNIKA I. Dr.Varga Péter János 2 Műholdas kommunikáció 3 4 Helymeghatározás 5 Alkalmazott műholdpályák, tulajdonságaik 6 Alkalmazott műholdpályák, tulajdonságaik A LEO [Low Earth Orbiter ]
6. HÍRADÁSTECHNIKA I. Dr.Varga Péter János 2 Műholdas kommunikáció 3 4 Helymeghatározás 5 Alkalmazott műholdpályák, tulajdonságaik 6 Alkalmazott műholdpályák, tulajdonságaik A LEO [Low Earth Orbiter ]
INFORMATIKA ÁGAZATI ALKALMAZÁSAI. Az Agrármérnöki MSc szak tananyagfejlesztése TÁMOP /1/A
 INFORMATIKA ÁGAZATI ALKALMAZÁSAI Az Agrármérnöki MSc szak tananyagfejlesztése TÁMOP-4.1.2-08/1/A-2009-0010 11. Globális helymeghatározás pontosító rendszerei Pontosságot befolyásoló tényezők Differenciális
INFORMATIKA ÁGAZATI ALKALMAZÁSAI Az Agrármérnöki MSc szak tananyagfejlesztése TÁMOP-4.1.2-08/1/A-2009-0010 11. Globális helymeghatározás pontosító rendszerei Pontosságot befolyásoló tényezők Differenciális
A jogszabályi változások és a hazai infrastruktúrában történt fejlesztések hatása a GNSS mérésekre
 A jogszabályi változások és a hazai infrastruktúrában történt fejlesztések hatása a GNSS mérésekre Braunmüller Péter Galambos István MFTTT 29. Vándorgyűlés, Sopron 2013. Július 11. Földmérési és Távérzékelési
A jogszabályi változások és a hazai infrastruktúrában történt fejlesztések hatása a GNSS mérésekre Braunmüller Péter Galambos István MFTTT 29. Vándorgyűlés, Sopron 2013. Július 11. Földmérési és Távérzékelési
Aktív GNSS hálózat fejlesztése
 Aktív GNSS hálózat fejlesztése a penci KGO-ban Horváth Tamás Rédey István Szeminárium, BME, 2004. november 17. Tartalom Háttér Abszolút GNSS helymeghatározás Standalone DGNSS és RTK referencia állomások
Aktív GNSS hálózat fejlesztése a penci KGO-ban Horváth Tamás Rédey István Szeminárium, BME, 2004. november 17. Tartalom Háttér Abszolút GNSS helymeghatározás Standalone DGNSS és RTK referencia állomások
GPS rendszerek és felhasználásuk
 GPS rendszerek és felhasználásuk A jelenlegi szabatos mőholdas helymeghatározó rendszerek közvetlen elızménye az USA Haditengerészete számára 1961-ben kifejlesztett TRANSIT mőholdas navigációs rendszer,
GPS rendszerek és felhasználásuk A jelenlegi szabatos mőholdas helymeghatározó rendszerek közvetlen elızménye az USA Haditengerészete számára 1961-ben kifejlesztett TRANSIT mőholdas navigációs rendszer,
Leica Viva GNSS SmartLink technológia. Csábi Zoltán mérnök üzletkötő, Kelet-Magyarország
 Leica Viva GNSS SmartLink technológia Csábi Zoltán mérnök üzletkötő, Kelet-Magyarország Kitoljuk a határokat Leica Viva GNSS technológia Az igazi határ ott van ahol a műszer még éppen működik, illetve
Leica Viva GNSS SmartLink technológia Csábi Zoltán mérnök üzletkötő, Kelet-Magyarország Kitoljuk a határokat Leica Viva GNSS technológia Az igazi határ ott van ahol a műszer még éppen működik, illetve
Takács Bence GPS: pontosság és megbízhatóság. Földmérők Világnapja és Európai Földmérők és Geoinformatikusok Napja Budapest, március 21.
 Takács Bence GPS: pontosság és megbízhatóság Földmérők Világnapja és Európai Földmérők és Geoinformatikusok Napja Budapest, 2018. március 21. AIRBUS A320 LOW VISIBILITY ILS CAT III AUTOLAND APPROACH IN
Takács Bence GPS: pontosság és megbízhatóság Földmérők Világnapja és Európai Földmérők és Geoinformatikusok Napja Budapest, 2018. március 21. AIRBUS A320 LOW VISIBILITY ILS CAT III AUTOLAND APPROACH IN
GNSS a precíziós mezőgazdaságban
 GNSS a precíziós mezőgazdaságban 2015.10.27. 1/14 GNSS a precíziós mezőgazdaságban Horváth Tamás Alberding GmbH GPS25 Konferencia Műholdas helymeghatározás Magyarországon 1990-2015 2015. október 27., Budapest
GNSS a precíziós mezőgazdaságban 2015.10.27. 1/14 GNSS a precíziós mezőgazdaságban Horváth Tamás Alberding GmbH GPS25 Konferencia Műholdas helymeghatározás Magyarországon 1990-2015 2015. október 27., Budapest
GNSS Modernizáció. Horváth Tamás FÖMI Kozmikus Geodéziai Obszervatórium Penc. Tea előadás, 2006. június 1., Penc
 1 GNSS Modernizáció Horváth Tamás FÖMI Kozmikus Geodéziai Obszervatórium Penc Tea előadás, 2006. június 1., Penc Tartalom GPS GLONASS Galileo 2 GPS Block IIR Block IIA Block IIF 3 A GPS pontossága GPS
1 GNSS Modernizáció Horváth Tamás FÖMI Kozmikus Geodéziai Obszervatórium Penc Tea előadás, 2006. június 1., Penc Tartalom GPS GLONASS Galileo 2 GPS Block IIR Block IIA Block IIF 3 A GPS pontossága GPS
új utak a minıségben!
 GIS OPEN - 2008 Professzionális Leica megoldások TPS1200+ SmartRTK Horváth Zsolt Gombás László Leica TPS1200+ új utak a minıségben! TPS1200+ Mik egy hatékony mérıállomás ismérvei? Szögmérési pontosság
GIS OPEN - 2008 Professzionális Leica megoldások TPS1200+ SmartRTK Horváth Zsolt Gombás László Leica TPS1200+ új utak a minıségben! TPS1200+ Mik egy hatékony mérıállomás ismérvei? Szögmérési pontosság
Híradástechnika I. 5.ea
 } Híradástechnika I. 5.ea Dr.Varga Péter János 2 Műholdas kommunikáció 3 4 Alkalmazott műholdpályák, tulajdonságaik 5 Alkalmazott műholdpályák, tulajdonságaik A LEO [Low Earth Orbiter ] magába foglalja
} Híradástechnika I. 5.ea Dr.Varga Péter János 2 Műholdas kommunikáció 3 4 Alkalmazott műholdpályák, tulajdonságaik 5 Alkalmazott műholdpályák, tulajdonságaik A LEO [Low Earth Orbiter ] magába foglalja
Óbudai Egyetem Alba Regia Műszaki Kar Szakdolgozat védés 2015. január 2. GNSS technika alkalmazása tervezési alaptérképek készítésekor
 Óbudai Egyetem Alba Regia Műszaki Kar Szakdolgozat védés 2015. január 2. GNSS technika alkalmazása tervezési alaptérképek készítésekor Péter Tamás Földmérő földrendező mérnök BSc. Szak, V. évfolyam Dr.
Óbudai Egyetem Alba Regia Műszaki Kar Szakdolgozat védés 2015. január 2. GNSS technika alkalmazása tervezési alaptérképek készítésekor Péter Tamás Földmérő földrendező mérnök BSc. Szak, V. évfolyam Dr.
, ,457. GNSS technológia Budapest június 20 július 1.
 110,457 110,457 2 1 3 4 2 GNNS Elv, módszerek, Budapest 2016. június Földmérési és Távérzékelési Intézet Navigare necesse est, vivere non est necesse! Hajózni kell, élni nem kell!", Pompeius 6 3 TÁJÉKOZÓDÁS
110,457 110,457 2 1 3 4 2 GNNS Elv, módszerek, Budapest 2016. június Földmérési és Távérzékelési Intézet Navigare necesse est, vivere non est necesse! Hajózni kell, élni nem kell!", Pompeius 6 3 TÁJÉKOZÓDÁS
A GNSS Szolgáltató Központ 2009-ben www.gnssnet.hu. Galambos István FÖMI Kozmikus Geodéziai Obszervatórium
 A GNSS Szolgáltató Központ 2009-ben www.gnssnet.hu Galambos István FÖMI Kozmikus Geodéziai Obszervatórium Tartalom: A FÖMI GNSSnet.hu hálózata 2008 év végén Modernizáció a hálózatban 2009-ben A szolgáltatások
A GNSS Szolgáltató Központ 2009-ben www.gnssnet.hu Galambos István FÖMI Kozmikus Geodéziai Obszervatórium Tartalom: A FÖMI GNSSnet.hu hálózata 2008 év végén Modernizáció a hálózatban 2009-ben A szolgáltatások
GNSSnet.hu új szolgáltatások és új lehetőségek
 GNSSnet.hu új szolgáltatások és új lehetőségek Braunmüller Péter GISopen 2013, Székesfehérvár 2013. március 13. Földmérési és Távérzékelési Intézet GNSS Szolgáltató Központ GISopen 2012 Ionoszféra időbeli
GNSSnet.hu új szolgáltatások és új lehetőségek Braunmüller Péter GISopen 2013, Székesfehérvár 2013. március 13. Földmérési és Távérzékelési Intézet GNSS Szolgáltató Központ GISopen 2012 Ionoszféra időbeli
Térinformatikai DGPS NTRIP vétel és feldolgozás
 Térinformatikai DGPS NTRIP vétel és feldolgozás Méréseinkhez a Thales Mobile Mapper CE térinformatikai GPS vevıt használtunk. A mérést a Szegedi Tudományegyetem Egyetem utcai épületének tetején található
Térinformatikai DGPS NTRIP vétel és feldolgozás Méréseinkhez a Thales Mobile Mapper CE térinformatikai GPS vevıt használtunk. A mérést a Szegedi Tudományegyetem Egyetem utcai épületének tetején található
GPS és atomóra. Kunsági-Máté Sándor. Fizikus MSc 1. évfolyam
 GPS és atomóra Kunsági-Máté Sándor Fizikus MSc 1. évfolyam Informatikai eszközök fizikai alapjai, 2017. március 1. Eötvös Loránd Tudományegyetem, Természettudományi Kar, Budapest Történeti bevezető 1957
GPS és atomóra Kunsági-Máté Sándor Fizikus MSc 1. évfolyam Informatikai eszközök fizikai alapjai, 2017. március 1. Eötvös Loránd Tudományegyetem, Természettudományi Kar, Budapest Történeti bevezető 1957
GPS szótár. A legfontosabb 25 kifejezés a GPS világából. Készítette: Gere Tamás A GPSArena.hu alapítója
 A legfontosabb 25 kifejezés a GPS világából Készítette: Gere Tamás A GPSArena.hu alapítója 2D/3D vétel Megadja, hogy a GPS vétel síkbeli (2D) vagy térbeli (3D). Utóbbi esetben magassági adat is rendelkezésre
A legfontosabb 25 kifejezés a GPS világából Készítette: Gere Tamás A GPSArena.hu alapítója 2D/3D vétel Megadja, hogy a GPS vétel síkbeli (2D) vagy térbeli (3D). Utóbbi esetben magassági adat is rendelkezésre
MultiMédia az oktatásban Zsigmond Király Fıiskola Budapest, 2008. szeptember 25 26.
 BUSZNYÁK JÁNOS 1 DR. BERKE JÓZSEF 2 GPS és Vizualitás Pannon Egyetem Georgikon Kar, Gábor Dénes Fıiskola 1 bjs@georgikon.hu, 2 berke@szamalk.hu Absztrakt A GPS (globális helymeghatározás) mőholdas rendszerei
BUSZNYÁK JÁNOS 1 DR. BERKE JÓZSEF 2 GPS és Vizualitás Pannon Egyetem Georgikon Kar, Gábor Dénes Fıiskola 1 bjs@georgikon.hu, 2 berke@szamalk.hu Absztrakt A GPS (globális helymeghatározás) mőholdas rendszerei
PPP-RTK a hálózati RTK jövője?
 1 PPP-RTK a hálózati RTK jövője? Horváth Tamás FÖMI Kozmikus Geodéziai Obszervatórium Penc Rédey Szeminárium, BME, 006. április 6., Budapest Tartalom Emlékeztető Mérés-tér, állapot-tér PPP PPP-RTK Emlékeztető
1 PPP-RTK a hálózati RTK jövője? Horváth Tamás FÖMI Kozmikus Geodéziai Obszervatórium Penc Rédey Szeminárium, BME, 006. április 6., Budapest Tartalom Emlékeztető Mérés-tér, állapot-tér PPP PPP-RTK Emlékeztető
GPS. Lehoczki Róbert Vadvilág Megőrzési Intézet Szent István Egyetem, Gödöllő
 GPS Lehoczki Róbert Vadvilág Megőrzési Intézet Szent István Egyetem, Gödöllő Három technológiát egyesít: GPS (helymeghatározás) Robosztus terepen is használható hardver Egyszerű és hatékony szoftver Mire
GPS Lehoczki Róbert Vadvilág Megőrzési Intézet Szent István Egyetem, Gödöllő Három technológiát egyesít: GPS (helymeghatározás) Robosztus terepen is használható hardver Egyszerű és hatékony szoftver Mire
Magasságos GPS. avagy továbbra is
 Magasságos GPS avagy továbbra is Tisztázatlan kérdések az RTK-technológiával végzett magasságmeghatározás területén? http://www.sgo.fomi.hu/files/magassagi_problemak.pdf Takács Bence BME Általános- és
Magasságos GPS avagy továbbra is Tisztázatlan kérdések az RTK-technológiával végzett magasságmeghatározás területén? http://www.sgo.fomi.hu/files/magassagi_problemak.pdf Takács Bence BME Általános- és
A távérzékelésről. A műholdas helymeghatározás GPS 2012.05.18. 1
 A távérzékelésről. A műholdas helymeghatározás GPS 2012.05.18. 1 A térbeli adatok meghatározása elsődleges geometriai adatnyerési eljárások, másodlagos adatnyerési eljárások 2012.05.18. 2 Az elsődleges
A távérzékelésről. A műholdas helymeghatározás GPS 2012.05.18. 1 A térbeli adatok meghatározása elsődleges geometriai adatnyerési eljárások, másodlagos adatnyerési eljárások 2012.05.18. 2 Az elsődleges
Érsek Ákos. GPSCOM Kft.
 ASHTECH mobil térinformatikai adatgyűjtők HUNAGI 3.MobilGIS konferencia 2012, Budapest Érsek Ákos 1 GPSCOM Kft. Alaptérkép felvétel a ProMark800 készülékkel Az legújabb GNSS centrikus vevő amely képes
ASHTECH mobil térinformatikai adatgyűjtők HUNAGI 3.MobilGIS konferencia 2012, Budapest Érsek Ákos 1 GPSCOM Kft. Alaptérkép felvétel a ProMark800 készülékkel Az legújabb GNSS centrikus vevő amely képes
Sokkia gyártmányú RTK GPS rendszer
 Sokkia gyártmányú RTK GPS rendszer A leírást készítette: Deákvári József, intézeti mérnök Az FVM Mezőgazdasági Gépesítési Intézet 2005-ben újabb műszerekkel gyarapodott. Beszerzésre került egy Sokkia gyártmányú
Sokkia gyártmányú RTK GPS rendszer A leírást készítette: Deákvári József, intézeti mérnök Az FVM Mezőgazdasági Gépesítési Intézet 2005-ben újabb műszerekkel gyarapodott. Beszerzésre került egy Sokkia gyártmányú
Miskolci Egyetem Doktori Tanácsa Miskolc. Program: Geotechniaki rendszerek és eljárástechnika Programvezető: Dr. Kovács Ferenc
 Miskolci Egyetem Doktori Tanácsa Miskolc Program: Geotechniaki rendszerek és eljárástechnika Programvezető: Dr. Kovács Ferenc Alprogram: Geotechnikai rendszerek és eljárások kutatása, fejlesztése Részprogram:
Miskolci Egyetem Doktori Tanácsa Miskolc Program: Geotechniaki rendszerek és eljárástechnika Programvezető: Dr. Kovács Ferenc Alprogram: Geotechnikai rendszerek és eljárások kutatása, fejlesztése Részprogram:
Székesfehérvár
 1 2009.03.19. - Székesfehérvár System1200-2004 SmartStation - 2005 SmartRover - 2006 SmartPole/TPS1200+ 2007 SmartRTK + MAC 2008 GPS1200+ GNSS 2009-200? 2 ? Elérhető GNSS jelek haszn. Modern hálózati megold.
1 2009.03.19. - Székesfehérvár System1200-2004 SmartStation - 2005 SmartRover - 2006 SmartPole/TPS1200+ 2007 SmartRTK + MAC 2008 GPS1200+ GNSS 2009-200? 2 ? Elérhető GNSS jelek haszn. Modern hálózati megold.
GPS. 1.a A GLONASS rendszer. Feladata. A rendszer felépítése. A GLONASS és s a GALILEO GPS- rendszerek. Céljaiban NAVSTAR GPS rendszerhez
 GPS A GLONASS és s a GALILEO GPS- rendszerek Összeállította: Szűcs LászlL szló 1.a A GLONASS rendszer Globális lis Navigáci ciós s Műholdrendszer M orosz elnevezés s rövidr vidítése Céljaiban és s kialakításában
GPS A GLONASS és s a GALILEO GPS- rendszerek Összeállította: Szűcs LászlL szló 1.a A GLONASS rendszer Globális lis Navigáci ciós s Műholdrendszer M orosz elnevezés s rövidr vidítése Céljaiban és s kialakításában
A GNSSnet.hu arcai. KGO 40 konferencia Budapest, Földmérési és Távérzékelési Intézet GNSS Szolgáltató Központ Galambos István
 Földmérési és Távérzékelési Intézet GNSS Szolgáltató Központ Galambos István Előzmény A KGO elévülhetetlen érdeme a GPS hazai honosításában Kezdetekben (90-es évek) a relatív műholdas helymeghatározás
Földmérési és Távérzékelési Intézet GNSS Szolgáltató Központ Galambos István Előzmény A KGO elévülhetetlen érdeme a GPS hazai honosításában Kezdetekben (90-es évek) a relatív műholdas helymeghatározás
TÉRINFORMATIKA II. Dr. Kulcsár Balázs Ph.D. adjunktus. Debreceni Egyetem Műszaki Kar Műszaki Alaptárgyi Tanszék
 TÉRINFORMATIKA II. Dr. Kulcsár Balázs Ph.D. adjunktus Debreceni Egyetem Műszaki Kar Műszaki Alaptárgyi Tanszék ELSŐDLEGES ADATNYERÉSI ELJÁRÁSOK 1. Geodézia Fotogrammetria Mesterséges holdak GEOMETRIAI
TÉRINFORMATIKA II. Dr. Kulcsár Balázs Ph.D. adjunktus Debreceni Egyetem Műszaki Kar Műszaki Alaptárgyi Tanszék ELSŐDLEGES ADATNYERÉSI ELJÁRÁSOK 1. Geodézia Fotogrammetria Mesterséges holdak GEOMETRIAI
MIKROFYN GÉPVEZÉRLÉSEK. 2D megoldások:
 MIKROFYN GÉPVEZÉRLÉSEK Néhány szó a gyártóról: Az 1987-es kezdés óta a Mikrofyn A/S a világ öt legnagyobb precíziós lézer és gépvezérlés gyártója közé lépett. A profitot visszaforgatta az új termékek fejlesztésébe
MIKROFYN GÉPVEZÉRLÉSEK Néhány szó a gyártóról: Az 1987-es kezdés óta a Mikrofyn A/S a világ öt legnagyobb precíziós lézer és gépvezérlés gyártója közé lépett. A profitot visszaforgatta az új termékek fejlesztésébe
GNSSnet.hu a hazai GNSS infrastruktúra Földmérési és Távérzékelési Intézet
 GNSSnet.hu a hazai GNSS infrastruktúra Földmérési és Távérzékelési Intézet Tartalom 47/2010. (IV. 27.) FVM rendelet A hazai GNSS infrastruktúra Miért válasszuk a GNSSnet.hu rendszert? Felhasználók száma
GNSSnet.hu a hazai GNSS infrastruktúra Földmérési és Távérzékelési Intézet Tartalom 47/2010. (IV. 27.) FVM rendelet A hazai GNSS infrastruktúra Miért válasszuk a GNSSnet.hu rendszert? Felhasználók száma
szló egyetemi tanár, igazgató szségügyi gyi informatikai Workshop Miskolctapolca, 2006. December 11.
 Tóth LászlL szló egyetemi tanár, igazgató Honnan jövünk? j Hol vagyunk? Merre megyünk? Paul GAUGIN, 1897 (Boston, Museum of Fine Arts, 141x376 cm) A tudományban és a technológiában az alapvető fejlődések
Tóth LászlL szló egyetemi tanár, igazgató Honnan jövünk? j Hol vagyunk? Merre megyünk? Paul GAUGIN, 1897 (Boston, Museum of Fine Arts, 141x376 cm) A tudományban és a technológiában az alapvető fejlődések
Adatgyűjtés. Kézi technológiák. Adatgyűjtési technológiák. Térbeli adatok jelenségek térbeli elhelyezkedése, kiterjedése, stb.
 Adatgyűjtés Adatgyűjtés Adatgyűjtési és adatnyerési technikák a térinformatikában Térbeli adatok jelenségek térbeli elhelyezkedése, kiterjedése, stb. Leíró (attributum) adatok a térképi objektumokhoz rendelt
Adatgyűjtés Adatgyűjtés Adatgyűjtési és adatnyerési technikák a térinformatikában Térbeli adatok jelenségek térbeli elhelyezkedése, kiterjedése, stb. Leíró (attributum) adatok a térképi objektumokhoz rendelt
A GNSS SZOLGÁLTAT LTATÓ. Mnyerczán András FÖMI Kozmikus Geodéziai Obszervatórium. GIS Open, 2007 március 12, Székesfehérvár
 A GNSS SZOLGÁLTAT LTATÓ KÖZPONT 2007-BEN Mnyerczán András FÖMI Kozmikus Geodéziai Obszervatórium GIS Open, 2007 március 12, Székesfehérvár Tartalom A referenciaállomás-hálózat jelenlegi helyzete A GNSS
A GNSS SZOLGÁLTAT LTATÓ KÖZPONT 2007-BEN Mnyerczán András FÖMI Kozmikus Geodéziai Obszervatórium GIS Open, 2007 március 12, Székesfehérvár Tartalom A referenciaállomás-hálózat jelenlegi helyzete A GNSS
GPS mérési jegyz könyv
 GPS mérési jegyz könyv Mérést végezte: Csutak Balázs, Laczkó Hunor Mérés helye: ITK 320. terem és az egyetem környéke Mérés ideje: 2016.03.16 A mérés célja: Ismerkedés a globális helymeghatározó rendszerrel,
GPS mérési jegyz könyv Mérést végezte: Csutak Balázs, Laczkó Hunor Mérés helye: ITK 320. terem és az egyetem környéke Mérés ideje: 2016.03.16 A mérés célja: Ismerkedés a globális helymeghatározó rendszerrel,
MUNKAANYAG. Heilmann János. Globális helymeghatározó rendszerrel történő vízszintes alappontsűrítés. A követelménymodul megnevezése:
 Heilmann János Globális helymeghatározó rendszerrel történő vízszintes alappontsűrítés A követelménymodul megnevezése: Alappontsűrítés és terepi adatgyűjtés feladatai A követelménymodul száma: 2246-06
Heilmann János Globális helymeghatározó rendszerrel történő vízszintes alappontsűrítés A követelménymodul megnevezése: Alappontsűrítés és terepi adatgyűjtés feladatai A követelménymodul száma: 2246-06
LOKÁLIS IONOSZFÉRA MODELLEZÉS ÉS ALKALMAZÁSA A GNSS HELYMEGHATÁROZÁSBAN
 LOKÁLIS IONOSZFÉRA MODELLEZÉS ÉS ALKALMAZÁSA A GNSS HELYMEGHATÁROZÁSBAN Juni Ildikó Budapesti Műszaki és Gazdaságtudományi Egyetem BSc IV. évfolyam Konzulens: Dr. Rózsa Szabolcs MFTT 29. Vándorgyűlés,
LOKÁLIS IONOSZFÉRA MODELLEZÉS ÉS ALKALMAZÁSA A GNSS HELYMEGHATÁROZÁSBAN Juni Ildikó Budapesti Műszaki és Gazdaságtudományi Egyetem BSc IV. évfolyam Konzulens: Dr. Rózsa Szabolcs MFTT 29. Vándorgyűlés,
Agrár-környezetvédelmi Modul Agrár-környezetvédelem, agrotechnológia. KÖRNYEZETGAZDÁLKODÁSI MÉRNÖKI MSc TERMÉSZETVÉDELMI MÉRNÖKI MSc
 Agrár-környezetvédelmi Modul Agrár-környezetvédelem, agrotechnológia KÖRNYEZETGAZDÁLKODÁSI MÉRNÖKI MSc TERMÉSZETVÉDELMI MÉRNÖKI MSc Precíziós mezőgazdaság információ technológiai alapjai II. 138.lecke
Agrár-környezetvédelmi Modul Agrár-környezetvédelem, agrotechnológia KÖRNYEZETGAZDÁLKODÁSI MÉRNÖKI MSc TERMÉSZETVÉDELMI MÉRNÖKI MSc Precíziós mezőgazdaság információ technológiai alapjai II. 138.lecke
A zalaszántói őskori halmok kataszterének elkészítése
 SZAKDOLGOZATVÉDÉS 2008.11.21. A zalaszántói őskori halmok kataszterének elkészítése Havasi Bálint Geoinformatika szak A felmérés okai. 1. KÖH kezdeményezte a 2001. évi LXIV. törvény alapján a Zalaszántó-Vár
SZAKDOLGOZATVÉDÉS 2008.11.21. A zalaszántói őskori halmok kataszterének elkészítése Havasi Bálint Geoinformatika szak A felmérés okai. 1. KÖH kezdeményezte a 2001. évi LXIV. törvény alapján a Zalaszántó-Vár
ProMark 800. Teljes GNSS produktivitás Október, 2011
 ProMark 800 Teljes GNSS produktivitás Október, 2011 Mi is a ProMark 800? Egy hatékony RTK rendszerű vevőkészülék, melypontos GNSS helymeghatározást tesz lehetővé okos, terepálló, vezeték nélküli és flexibilis
ProMark 800 Teljes GNSS produktivitás Október, 2011 Mi is a ProMark 800? Egy hatékony RTK rendszerű vevőkészülék, melypontos GNSS helymeghatározást tesz lehetővé okos, terepálló, vezeték nélküli és flexibilis
GNSS csemegék GIS-hez és máshoz. www.geomentor.hu
 GNSS csemegék GIS-hez és máshoz Nem trendeket követ, hanem korlátokat feszeget és új utakat keres. Dr. Ashjaee Javad 29 éve a GPS/GNSS technológia élvonalában tevékenykedik, a legtöbb meghatározó technológiai
GNSS csemegék GIS-hez és máshoz Nem trendeket követ, hanem korlátokat feszeget és új utakat keres. Dr. Ashjaee Javad 29 éve a GPS/GNSS technológia élvonalában tevékenykedik, a legtöbb meghatározó technológiai
A műholdas helymeghatározás infrastruktúrája
 Népszerűen a műholdas helymeghatározásról és navigációról 2. rész Az idő mérése, karóránk leolvasása, ma mindannyiunk számára természetes tevékenység. De vajon ugyanilyen természetes és szükséges lesz-e
Népszerűen a műholdas helymeghatározásról és navigációról 2. rész Az idő mérése, karóránk leolvasása, ma mindannyiunk számára természetes tevékenység. De vajon ugyanilyen természetes és szükséges lesz-e
A magyarországi GNSS-infrastruktúra
 A magyarországi GNSS-infrastruktúra Horváth Tamás BME Általános- és Felsőgeodézia tanszék, 2005. május 3. Tartalom GNSS hálózatok Passzív hálózat OGPSH (első generációs hálózat) Aktív hálózat (második
A magyarországi GNSS-infrastruktúra Horváth Tamás BME Általános- és Felsőgeodézia tanszék, 2005. május 3. Tartalom GNSS hálózatok Passzív hálózat OGPSH (első generációs hálózat) Aktív hálózat (második
A GNSSnet.hu aktualitásai; Geodéziai célú GNSS szolgáltatások hazánkban. GISopen Székesfehérvár,
 A GNSSnet.hu aktualitásai; Geodéziai célú GNSS szolgáltatások hazánkban Székesfehérvár, 2017.04.13. Galambos István Kozmikus Geodéziai Osztály GNSS szolgáltató központ Földmérési, Távérzékelési és Földhivatali
A GNSSnet.hu aktualitásai; Geodéziai célú GNSS szolgáltatások hazánkban Székesfehérvár, 2017.04.13. Galambos István Kozmikus Geodéziai Osztály GNSS szolgáltató központ Földmérési, Távérzékelési és Földhivatali
Spectra Precision GNSS eszközök
 Spectra Precision GNSS eszközök Magyar Földmérési, Térképészeti és Távérzékelési Társaság 29. VÁNDORGYŰLÉS Sopron, 2013. július 11 13. Érsek Ákos GPSCOM Kft. SPECTRA PRECISION termékskála Térképező GPS
Spectra Precision GNSS eszközök Magyar Földmérési, Térképészeti és Távérzékelési Társaság 29. VÁNDORGYŰLÉS Sopron, 2013. július 11 13. Érsek Ákos GPSCOM Kft. SPECTRA PRECISION termékskála Térképező GPS
Térinformatikai rendszer alkalmazása a madarak vonulásának nyomonkövetésében
 Harangozó Edit: Térinformatikai rendszer alkalmazása a madarak vonulásának nyomonkövetésében haranged@freemail.hu A Térinformatika Napja - Székesfehérvár, NyME-Geo 2009. november 18. Témaválasztás Fotó:
Harangozó Edit: Térinformatikai rendszer alkalmazása a madarak vonulásának nyomonkövetésében haranged@freemail.hu A Térinformatika Napja - Székesfehérvár, NyME-Geo 2009. november 18. Témaválasztás Fotó:
KUTATÁSI JELENTÉS. Multilaterációs radarrendszer kutatása. Szüllő Ádám
 KUTATÁSI JELENTÉS Multilaterációs radarrendszer kutatása Szüllő Ádám 212 Bevezetés A Mikrohullámú Távérzékelés Laboratórium jelenlegi K+F tevékenységei közül ezen jelentés a multilaterációs radarrendszerek
KUTATÁSI JELENTÉS Multilaterációs radarrendszer kutatása Szüllő Ádám 212 Bevezetés A Mikrohullámú Távérzékelés Laboratórium jelenlegi K+F tevékenységei közül ezen jelentés a multilaterációs radarrendszerek
A rendszer legfontosabb jellemzőit az alábbiakban foglalhatjuk össze:
 GPS nyomkövető készülék, illetve navigációs rendszerek A GPS a Global Positioning System angol rövidítése és globális helymeghatározó rendszert jelent. Egy rendszer, amely 24 műholdból áll, melyet az USA
GPS nyomkövető készülék, illetve navigációs rendszerek A GPS a Global Positioning System angol rövidítése és globális helymeghatározó rendszert jelent. Egy rendszer, amely 24 műholdból áll, melyet az USA
Geodéziai célú GNSS szolgáltatások a hazai műholdas helymeghatározásban
 Geodéziai célú GNSS szolgáltatások a hazai műholdas helymeghatározásban Galambos István Kozmikus Geodéziai Osztály GNSS szolgáltató központ Földmérési, Távérzékelési és Földhivatali Főosztály 1149 Budapest,
Geodéziai célú GNSS szolgáltatások a hazai műholdas helymeghatározásban Galambos István Kozmikus Geodéziai Osztály GNSS szolgáltató központ Földmérési, Távérzékelési és Földhivatali Főosztály 1149 Budapest,
Kozmikus geodézia MSc
 Kozmikus geodézia MSc 1-4 előadás: Tóth Gy. 5-13 előadás: Ádám J. 2 ZH: 6/7. és 12/13. héten (max. 30 pont) alapismeretek, csillagkatalógusok, koordináta- és időrendszerek, függővonal iránymeghatározása
Kozmikus geodézia MSc 1-4 előadás: Tóth Gy. 5-13 előadás: Ádám J. 2 ZH: 6/7. és 12/13. héten (max. 30 pont) alapismeretek, csillagkatalógusok, koordináta- és időrendszerek, függővonal iránymeghatározása
Babeș Bólyai Tudományegyetem Informatika kar Műholdas helymeghatározás a GPS rendszerrel
 Babeș Bólyai Tudományegyetem Informatika kar Műholdas helymeghatározás a GPS rendszerrel Szűcs Attila Levente Kolozsvár, 2010 Április 29. 1. Bevezető A GPS az angol Global Positioning System megnevezés
Babeș Bólyai Tudományegyetem Informatika kar Műholdas helymeghatározás a GPS rendszerrel Szűcs Attila Levente Kolozsvár, 2010 Április 29. 1. Bevezető A GPS az angol Global Positioning System megnevezés
Intelligens Közlekedési Rendszerek 2
 Intelligens Közlekedési Rendszerek 2 Máté Miklós 2016 Október 11 1 / 14 Szenzor (érzékelő): mérés, detektálás Mérés elmélet emlékeztető Jó mérőműszer tulajdonságai Érzékeny a mérendő tulajdonságra Érzéketlen
Intelligens Közlekedési Rendszerek 2 Máté Miklós 2016 Október 11 1 / 14 Szenzor (érzékelő): mérés, detektálás Mérés elmélet emlékeztető Jó mérőműszer tulajdonságai Érzékeny a mérendő tulajdonságra Érzéketlen
GNSS, Android OS és Felhő
 GIS Open 2017 2017.04.11.-13. Székesfehérvár GNSS, Android OS és Felhő Pap Krisztián GPSCOM Kft A kis zöld robot és más Op.rendszerek A régóta fennálló mobil Operációs rendszerek ideje lassan lejár. Az
GIS Open 2017 2017.04.11.-13. Székesfehérvár GNSS, Android OS és Felhő Pap Krisztián GPSCOM Kft A kis zöld robot és más Op.rendszerek A régóta fennálló mobil Operációs rendszerek ideje lassan lejár. Az
A GPS-rendszer. Adatgyűjtés A GPS. Helymeghatározási eljárások. 1. Földi geodéziai módszerek Mérőállomás
 Adatgyűjtés A GPS-rendszer Összeállította: Szűcs László Geometriai adatok gyűjtése Attribútum adatok gyűjtés Adatnyerés elsődleges: méréskor a tárgyal vagy képével fizikai kapcsolatba kerülünk másodlagos:
Adatgyűjtés A GPS-rendszer Összeállította: Szűcs László Geometriai adatok gyűjtése Attribútum adatok gyűjtés Adatnyerés elsődleges: méréskor a tárgyal vagy képével fizikai kapcsolatba kerülünk másodlagos:
A magyarországi GNSS infrastruktúra harmadik generációja. A globális helymeghatározás várható fejlődése. Az állapot-tér modellezés.
 12. előadás: A magyarországi GNSS infrastruktúra harmadik generációja. A globális helymeghatározás várható fejlődése. Az állapot-tér modellezés. 12.1. A GNSS infrastruktúra harmadik generációja A GNSS
12. előadás: A magyarországi GNSS infrastruktúra harmadik generációja. A globális helymeghatározás várható fejlődése. Az állapot-tér modellezés. 12.1. A GNSS infrastruktúra harmadik generációja A GNSS
RTKLIB alapú monitorozó alkalmazások
 Horváth Tamás RTKLIB alapú monitorozó megoldások 2015.11.27. 1/28 RTKLIB alapú monitorozó alkalmazások Horváth Tamás Alberding GmbH FOSS4GÉZÚ Nyílt forráskódú térinformatikai munkaértekezlet 2015. november
Horváth Tamás RTKLIB alapú monitorozó megoldások 2015.11.27. 1/28 RTKLIB alapú monitorozó alkalmazások Horváth Tamás Alberding GmbH FOSS4GÉZÚ Nyílt forráskódú térinformatikai munkaértekezlet 2015. november
Piri Dávid. Mérőállomás célkövető üzemmódjának pontossági vizsgálata
 Piri Dávid Mérőállomás célkövető üzemmódjának pontossági vizsgálata Feladat ismertetése Mozgásvizsgálat robot mérőállomásokkal Automatikus irányzás Célkövetés Pozíció folyamatos rögzítése Célkövető üzemmód
Piri Dávid Mérőállomás célkövető üzemmódjának pontossági vizsgálata Feladat ismertetése Mozgásvizsgálat robot mérőállomásokkal Automatikus irányzás Célkövetés Pozíció folyamatos rögzítése Célkövető üzemmód
Kutatói pályára felkészítı akadémiai ismeretek modul
 Kutatói pályára felkészítı akadémiai ismeretek modul Környezetgazdálkodás Adatgyőjtés, mérési alapok, a környezetgazdálkodás fontosabb mőszerei KÖRNYEZETGAZDÁLKODÁSI AGRÁRMÉRNÖK MSC Megfigyelı alrendszer
Kutatói pályára felkészítı akadémiai ismeretek modul Környezetgazdálkodás Adatgyőjtés, mérési alapok, a környezetgazdálkodás fontosabb mőszerei KÖRNYEZETGAZDÁLKODÁSI AGRÁRMÉRNÖK MSC Megfigyelı alrendszer
A FÖMI-GNSSnet.hu szolgáltatás, GNSS adatok feldolgozásának kérdései
 A FÖMI-GNSSnet.hu szolgáltatás, GNSS adatok feldolgozásának kérdései Földmérési és Távérzékelési Intézet GNSS Szolgáltató Központ Tartalom A GNSSnet.hu szolgáltatás Állomások, kommunikáció Központi feldolgozás
A FÖMI-GNSSnet.hu szolgáltatás, GNSS adatok feldolgozásának kérdései Földmérési és Távérzékelési Intézet GNSS Szolgáltató Központ Tartalom A GNSSnet.hu szolgáltatás Állomások, kommunikáció Központi feldolgozás
RTK szolgáltatás földmérési és precíziós mezőgazdasági felhasználáshoz
 GISopen 2018 Székesfehérvár, 2018. március 13. RTK szolgáltatás földmérési és precíziós mezőgazdasági felhasználáshoz Haász László ügyvezető Infobex Kft. RTK szolgáltatás Követelmények az RTK val szemben
GISopen 2018 Székesfehérvár, 2018. március 13. RTK szolgáltatás földmérési és precíziós mezőgazdasági felhasználáshoz Haász László ügyvezető Infobex Kft. RTK szolgáltatás Követelmények az RTK val szemben
ALKALMAZOTT TÉRINFORMATIKA 1.
 ALKALMAZOTT TÉRINFORMATIKA 1. FÖLDRAJZ ALAPSZAK (NAPPALI MUNKAREND) TANTÁRGYI KOMMUNIKÁCIÓS DOSSZIÉ MISKOLCI EGYETEM MŰSZAKI FÖLDTUDOMÁNYI KAR FÖLDRAJZ-GEOINFORMATIKA INTÉZET Miskolc, 2018. TARTALOMJEGYZÉK
ALKALMAZOTT TÉRINFORMATIKA 1. FÖLDRAJZ ALAPSZAK (NAPPALI MUNKAREND) TANTÁRGYI KOMMUNIKÁCIÓS DOSSZIÉ MISKOLCI EGYETEM MŰSZAKI FÖLDTUDOMÁNYI KAR FÖLDRAJZ-GEOINFORMATIKA INTÉZET Miskolc, 2018. TARTALOMJEGYZÉK
GNSS/RNSS rendszerek a földmegfigyelésben. Dr. Rózsa Szabolcs. Általános és Felsőgeodézia Tanszék
 GNSS/RNSS rendszerek a földmegfigyelésben Általános és Felsőgeodézia Tanszék Dr. Rózsa Szabolcs Minőségorientált, összehangolt oktatási és K+F+I stratégia, valamint működési modell kidolgozása a Műegyetemen
GNSS/RNSS rendszerek a földmegfigyelésben Általános és Felsőgeodézia Tanszék Dr. Rózsa Szabolcs Minőségorientált, összehangolt oktatási és K+F+I stratégia, valamint működési modell kidolgozása a Műegyetemen
Topcon Elit Mérőrenszer
 Topcon Elit Mérőrenszer Salgótarján, 2017. május 04. Navicom Plusz Bt. GT Robot Mérőállomás A VILÁG egyik LEGGYORSABB LEGKISEBB LEGKÖNNYEBB Robot mérőállomása. HiPer HR GNSS vevő KICSI, KÖNNYŰ, KOMPAKT
Topcon Elit Mérőrenszer Salgótarján, 2017. május 04. Navicom Plusz Bt. GT Robot Mérőállomás A VILÁG egyik LEGGYORSABB LEGKISEBB LEGKÖNNYEBB Robot mérőállomása. HiPer HR GNSS vevő KICSI, KÖNNYŰ, KOMPAKT
GNSSnet.hu. Akár cm-es pontosságú műholdas helymeghatározás bárhol az országban. Földmérési és Távérzékelési Intézet GNSS Szolgáltató Központ
 Akár cm-es pontosságú műholdas helymeghatározás bárhol az országban Földmérési és Távérzékelési Intézet GNSS Szolgáltató Központ Precíziós mezőgazdálkodás Automatikus munkagépvezérlés cm-es pontossággal
Akár cm-es pontosságú műholdas helymeghatározás bárhol az országban Földmérési és Távérzékelési Intézet GNSS Szolgáltató Központ Precíziós mezőgazdálkodás Automatikus munkagépvezérlés cm-es pontossággal
A MŐHOLDVÉTELRİL ÁLTALÁBAN
 http://tv.tvnet.hu/satellite/sat.html A MŐHOLDVÉTELRİL ÁLTALÁBAN Elızmények A mőholdas mősorsugárzás alapjának tekinthetı ötletet elıször Arthur C. Clarke írta le a Wireless World c. folyóiratban, 1945
http://tv.tvnet.hu/satellite/sat.html A MŐHOLDVÉTELRİL ÁLTALÁBAN Elızmények A mőholdas mősorsugárzás alapjának tekinthetı ötletet elıször Arthur C. Clarke írta le a Wireless World c. folyóiratban, 1945
A valós idejű, térinformatikai célú műholdas helymeghat{roz{s a barlangkataszterben
 A valós idejű, térinformatikai célú műholdas helymeghat{roz{s a barlangkataszterben Megfelelni az új kihívásoknak*gisopen-konferencia, 2011, Tarsoly Péter Bevezető A GNSS technológiák mára széles körben
A valós idejű, térinformatikai célú műholdas helymeghat{roz{s a barlangkataszterben Megfelelni az új kihívásoknak*gisopen-konferencia, 2011, Tarsoly Péter Bevezető A GNSS technológiák mára széles körben
GPSCOM Kft. Érsek Ákos
 Új ASHTECH GNSS vevők Válassza ki a pénztárcájának és a vállalkozásának legmegfelelőbb megoldást GISOPEN2011 - Székesfehérvár GPSCOM Kft. 1 Érsek Ákos 2 ÚJ MobileMapper 100 MobileMapper 100 A legpontosabb
Új ASHTECH GNSS vevők Válassza ki a pénztárcájának és a vállalkozásának legmegfelelőbb megoldást GISOPEN2011 - Székesfehérvár GPSCOM Kft. 1 Érsek Ákos 2 ÚJ MobileMapper 100 MobileMapper 100 A legpontosabb
DOKTORI (PhD) ÉRTEKEZÉS TÉZISEI. NYUGAT-MAGYARORSZÁGI EGYETEM MEZİGAZDASÁG- ÉS ÉLELMISZERTUDOMÁNYI KAR Mosonmagyaróvár
 ÉRTEKEZÉS TÉZISEI. NYUGAT-MAGYARORSZÁGI EGYETEM MEZİGAZDASÁG- ÉS ÉLELMISZERTUDOMÁNYI KAR Mosonmagyaróvár") DOKTORI (PhD) ÉRTEKEZÉS TÉZISEI NYUGAT-MAGYARORSZÁGI EGYETEM MEZİGAZDASÁG- ÉS ÉLELMISZERTUDOMÁNYI KAR Mosonmagyaróvár BIOLÓGIAI RENDSZEREK MŐSZAKI INTÉZETE Precíziós növénytermesztési módszerek alkalmazott
DOKTORI (PhD) ÉRTEKEZÉS TÉZISEI NYUGAT-MAGYARORSZÁGI EGYETEM MEZİGAZDASÁG- ÉS ÉLELMISZERTUDOMÁNYI KAR Mosonmagyaróvár BIOLÓGIAI RENDSZEREK MŐSZAKI INTÉZETE Precíziós növénytermesztési módszerek alkalmazott
FÖLDMÉRÉS ISMERETEK EMELT SZINTŰ ÍRÁSBELI VIZSGA JAVÍTÁSI-ÉRTÉKELÉSI ÚTMUTATÓ A MINTAFELADATOKHOZ
 FÖLDMÉRÉS ISMERETEK EMELT SZINTŰ ÍRÁSBELI VIZSGA JAVÍTÁSI-ÉRTÉKELÉSI ÚTMUTATÓ A MINTAFELADATOKHOZ 1 / 6 feladatlap Elméleti szöveges feladatok 1. Egészítse ki az alábbi szöveget a Glonassz GNSS alaprendszerrel
FÖLDMÉRÉS ISMERETEK EMELT SZINTŰ ÍRÁSBELI VIZSGA JAVÍTÁSI-ÉRTÉKELÉSI ÚTMUTATÓ A MINTAFELADATOKHOZ 1 / 6 feladatlap Elméleti szöveges feladatok 1. Egészítse ki az alábbi szöveget a Glonassz GNSS alaprendszerrel
Hidrogeodézia. Mederfelvétel. Varga Antal Sziebert János Dr. Tamás Enikő Anna Varga György Koch Dániel
 Hidrogeodézia Mederfelvétel Varga Antal Sziebert János Dr. Tamás Enikő Anna Varga György Koch Dániel TÁMOP-4.2.2.B-10/1-2010-0032 Tudományos képzés műhelyeinek támogatása az Eötvös József Főiskolán A mederfelvétel
Hidrogeodézia Mederfelvétel Varga Antal Sziebert János Dr. Tamás Enikő Anna Varga György Koch Dániel TÁMOP-4.2.2.B-10/1-2010-0032 Tudományos képzés műhelyeinek támogatása az Eötvös József Főiskolán A mederfelvétel
Helymeghatározó technikák
 Mobil Informatika Dr. Kutor László Helymeghatározó technikák http://uni-obuda.hu/users/kutor/ MoI 5/24/1 Műholdas távközlési rendszerek GEO (Geostationary Earth Orbit Satellite) Geostacionáris pályán keringő
Mobil Informatika Dr. Kutor László Helymeghatározó technikák http://uni-obuda.hu/users/kutor/ MoI 5/24/1 Műholdas távközlési rendszerek GEO (Geostationary Earth Orbit Satellite) Geostacionáris pályán keringő
HÍRADÁSTECHNIKA I. Dr.Varga Péter János
 3. HÍRADÁSTECHNIKA I. Dr.Varga Péter János 2 Műholdas kommunikáció 3 4 Helymeghatározás 5 Alkalmazott műholdpályák, tulajdonságaik 6 Alkalmazott műholdpályák, tulajdonságaik A LEO [Low Earth Orbiter ]
3. HÍRADÁSTECHNIKA I. Dr.Varga Péter János 2 Műholdas kommunikáció 3 4 Helymeghatározás 5 Alkalmazott műholdpályák, tulajdonságaik 6 Alkalmazott műholdpályák, tulajdonságaik A LEO [Low Earth Orbiter ]
Precíz valós idejû mûholdas helymeghatározás: az elsô DGPS megoldástól az EUPOS-ig
 Precíz valós idejû mûholdas helymeghatározás: az elsô DGPS megoldástól az EUPOS-ig BORZA TIBOR, FEJES ISTVÁN, HORVÁTH TAMÁS FÖMI Kozmikus Geodéziai Obszervatórium horvath@gpsnet.hu Lektorált Kulcsszavak:
Precíz valós idejû mûholdas helymeghatározás: az elsô DGPS megoldástól az EUPOS-ig BORZA TIBOR, FEJES ISTVÁN, HORVÁTH TAMÁS FÖMI Kozmikus Geodéziai Obszervatórium horvath@gpsnet.hu Lektorált Kulcsszavak:
Magyar Földmérési, Térképészeti és Távérzékelési Társaság 32. Vándorgyűlés Békéscsaba, július 4-6. GO GET GEO! Érsek Ákos GPSCOM Kft
 Magyar Földmérési, Térképészeti és Távérzékelési Társaság 32. Vándorgyűlés Békéscsaba, 2019. július 4-6. GO GET GEO! Érsek Ákos GPSCOM Kft SPECTRA GEOSPATIAL termékek ÚJ! Térinformatikai GPS készülékek
Magyar Földmérési, Térképészeti és Távérzékelési Társaság 32. Vándorgyűlés Békéscsaba, 2019. július 4-6. GO GET GEO! Érsek Ákos GPSCOM Kft SPECTRA GEOSPATIAL termékek ÚJ! Térinformatikai GPS készülékek
A GNSS technika szerepe az autópálya tervezési térképek készítésénél
 A GNSS technika szerepe az autópálya tervezési térképek készítésénél Készítette: Szászvári János Továbbképző Tagozat-Földügyi Informatikus Szak-Építési Geodézia Szakirány A témaválasztás indoklása, a dolgozat
A GNSS technika szerepe az autópálya tervezési térképek készítésénél Készítette: Szászvári János Továbbképző Tagozat-Földügyi Informatikus Szak-Építési Geodézia Szakirány A témaválasztás indoklása, a dolgozat
Sokkia 2007 CSRA JÁRATVA
 Sokkia 2007 CSÚCSRA CSRA JÁRATVA SRX robot-méröállomás GSR2700 ISX GNSS vevö X mint extrém (RENDKÍVÜLI) Rendkívüli képességü RED-tech EX lézertávmérö 3+2 ppm pontosság 30 cm-től 200 méterig Rendkívüli
Sokkia 2007 CSÚCSRA CSRA JÁRATVA SRX robot-méröállomás GSR2700 ISX GNSS vevö X mint extrém (RENDKÍVÜLI) Rendkívüli képességü RED-tech EX lézertávmérö 3+2 ppm pontosság 30 cm-től 200 méterig Rendkívüli
Fine-Grained Network Time Synchronization using Reference Broadcast
 Fine-Grained Network Time Synchronization using Reference Broadcast Ofszet Az indítás óta eltelt idıt mérik Az ofszet változása: skew Az órák sebességének különbsége Oka: Az óra az oszcillátor pontatlanságát
Fine-Grained Network Time Synchronization using Reference Broadcast Ofszet Az indítás óta eltelt idıt mérik Az ofszet változása: skew Az órák sebességének különbsége Oka: Az óra az oszcillátor pontatlanságát
A háromlépcsős megoldás. GeoMentor Kft Biztos háttér földmérőknek
 A háromlépcsős megoldás GeoMentor Kft Biztos háttér földmérőknek Biztos háttér Értékesítés Fejlett műszertechnológia (GNSS) Tanácsadás Felhasználó támogatás korszerűen (web) Műszer specifikus: Sokkia &
A háromlépcsős megoldás GeoMentor Kft Biztos háttér földmérőknek Biztos háttér Értékesítés Fejlett műszertechnológia (GNSS) Tanácsadás Felhasználó támogatás korszerűen (web) Műszer specifikus: Sokkia &
GSR2700 ISX. A Sokkia GSR2700ISX a leghatékonyabb RTK vevő a piacon! Csúcsképességű alapszolgáltatások. Komfortfokozó extrák
 GNSS fejlesztések GSR2700 ISX A Sokkia GSR2700ISX a leghatékonyabb RTK vevő a piacon! Csúcsképességű alapszolgáltatások Szupergyors újrainicializálás Hatékony RTK algoritmus Egyszerű üzembe helyezés +
GNSS fejlesztések GSR2700 ISX A Sokkia GSR2700ISX a leghatékonyabb RTK vevő a piacon! Csúcsképességű alapszolgáltatások Szupergyors újrainicializálás Hatékony RTK algoritmus Egyszerű üzembe helyezés +
Új szolgáltatási képességek I.: földrajzi hely alapú szolgáltatások
 Budapesti Műszaki és Gazdaságtudományi Egyetem Villamosmérnöki és Informatikai Kar Mérnök informatikus szak, mesterképzés Hírközlő rendszerek biztonsága szakirány Villamosmérnöki szak, mesterképzés - Újgenerációs
Budapesti Műszaki és Gazdaságtudományi Egyetem Villamosmérnöki és Informatikai Kar Mérnök informatikus szak, mesterképzés Hírközlő rendszerek biztonsága szakirány Villamosmérnöki szak, mesterképzés - Újgenerációs
Dr. Jancsó Tamás Középpontban az innováció Május 20.
 Regionális innovációs kutatást segítı infrastruktúra a Geoinformatikai Karon Dr. Jancsó Tamás E-mail: jt@geo.info.hu Középpontban az innováció 2009. Május 20. Épületek Kutatást támogató tényezık Eszköz,
Regionális innovációs kutatást segítı infrastruktúra a Geoinformatikai Karon Dr. Jancsó Tamás E-mail: jt@geo.info.hu Középpontban az innováció 2009. Május 20. Épületek Kutatást támogató tényezık Eszköz,
ADATÁTVITELI RENDSZEREK A GLOBÁLIS LOGISZTIKÁBAN
 9. ELŐADÁS ADATÁTVITELI RENDSZEREK A GLOBÁLIS LOGISZTIKÁBAN A logisztikai rendszerek irányításához szükség van az adatok továbbítására a rendszer különböző elemei között. Ezt a feladatot a különböző adatátviteli
9. ELŐADÁS ADATÁTVITELI RENDSZEREK A GLOBÁLIS LOGISZTIKÁBAN A logisztikai rendszerek irányításához szükség van az adatok továbbítására a rendszer különböző elemei között. Ezt a feladatot a különböző adatátviteli
Megoldások a TOPCON-tól és a Navicom-tól
 Megoldások a TOPCON-tól és a Navicom-tól The World Leader in Precision Positioning Products. Navicom Plusz Bt. Bartha Csaba www.navicom.hu Beszélhetnénk arról milyen fejlesztéseket hajtott végre,és mutatott
Megoldások a TOPCON-tól és a Navicom-tól The World Leader in Precision Positioning Products. Navicom Plusz Bt. Bartha Csaba www.navicom.hu Beszélhetnénk arról milyen fejlesztéseket hajtott végre,és mutatott
MIKOVINY SÁMUEL TÉRINFORMATIKAI EMLÉKVERSENY
 FVM VIDÉKFEJLESZTÉSI, KÉPZÉSI ÉS SZAKTANÁCSADÁSI INTÉZET NYUGAT MAGYARORSZÁGI EGYETEM GEOINFORMATIKAI KAR MIKOVINY SÁMUEL TÉRINFORMATIKAI EMLÉKVERSENY 2008/2009. TANÉV Az I. FORDULÓ FELADATAI NÉV:... Tudnivalók
FVM VIDÉKFEJLESZTÉSI, KÉPZÉSI ÉS SZAKTANÁCSADÁSI INTÉZET NYUGAT MAGYARORSZÁGI EGYETEM GEOINFORMATIKAI KAR MIKOVINY SÁMUEL TÉRINFORMATIKAI EMLÉKVERSENY 2008/2009. TANÉV Az I. FORDULÓ FELADATAI NÉV:... Tudnivalók
BT-R820 Használati utasítás BT-R820 Wireless GPS Egység Használati utasítás Dátum: Szeptember, 2006 Verzió: 1.1
 BT-R820 Wireless GPS Egység Használati utasítás Dátum: Szeptember, 2006 Verzió: 1.1 1. oldal TARTALOMJEGYZÉK 0. Gyors telepítés...3 1. Bevezetés...4 1.1 Áttekintés...4 1.2 Fő jellemzők...4 1.3 Alkalmazási
BT-R820 Wireless GPS Egység Használati utasítás Dátum: Szeptember, 2006 Verzió: 1.1 1. oldal TARTALOMJEGYZÉK 0. Gyors telepítés...3 1. Bevezetés...4 1.1 Áttekintés...4 1.2 Fő jellemzők...4 1.3 Alkalmazási