A műholdas helymeghatározás elve, és gyakorlati alkalmazása
|
|
|
- Ida Kelemen
- 9 évvel ezelőtt
- Látták:
Átírás
1 A műholdas helymeghatározás elve, és gyakorlati alkalmazása 1. GPS a helymeghatározás legkorszerűbb eszköze 2. A GPS mérés elve 3. A jelfeldolgozás alapelvei 4. Helymeghatározási módszerek 5. Milyen pontos a GPS? 1. GPS A HELYMEGHATÁROZÁS LEGKORSZERŰBB ESZKÖZE A földrajzi helymeghatározás többezer éves története során az elmúlt 35 év fejlesztései eredményezték a legnagyobb változást mind a módszerek, mind a lehetőségek tekintetében. A hagyományos, földi pontról földi pontra történő mérések mellet megjelentek az űrtechnika melléktermékei, a kozmikus és szatellita módszerek. A mesterséges holdról történő helymeghatározás elvét mutatja az alábbi ábra. Az i. állásponton működő vevőkészülék méri a műhold pillanatnyi távolságát és irányát, vagyis az r irányvektort. Amennyiben ismerjük a műhold koordinátáit, a vevő koordinátái ugyanabban a koordinátarendszerben számíthatók. Mivel a szatellitamódszerek közül pillanatnyilag egyik sem képes az r irányvektor mindhárom komponensét egyidőben szolgáltatni, ezért ha távolságmérést alkalmazunk, a vevőnek egyidőben 3 ismert koordinátájú műhold távolságát kell mérni. A GPS módszer esetében ez 4 műhold egyidejű mérését jelenti, mivel negyedik ismeretlenként kezeljük a vevőnk órájának eltérését a GPS rendszeridőtől. A mesterséges holdak koordinátái tetszőleges időpontra számíthatók a hold által sugárzott jelek kódolt paramétereiből. Ezek a koordináták geocentrikus, derékszögű X, Y, Z koordináták, melyek a WGS 84 referencia rendszerre vonatkoznak. A GPS mérések eredményeként elsődleges adatként WGS 84

2 rendszerben értelmezett geocentrikus, derékszögű X, Y, Z koordinátákat kapunk. Ezekből, - a megfelelő transzformációs paramétereket ismerve - tetszőleges dátumra, alaprendszerre vonatkoztatott koordinátákat számíthatunk. 2. A GPS MÉRÉS ELVE A GPS technika a mesterséges holdak által kisugárzott rádiójelek vételén alapul. A GPS holdak fedélzetén elhelyezett oszcillátorok f 0= MHz alapfrekvencián működnek, rádiójeleket azonban két különböző frekvencián sugároznak. Az L1 és L2 jelűn. Az L1 frekvencia az alapfrekvencia 154 -szerese, az L szorosa. L 1ŕ f 1 =154 f 0 = MHz. L 2ŕ f 2 =120 f 0 = MHz. Ennek megfelelően a hullámhosszak: l 1= 19.0 cm és l 2= 24.4 cm. Ezeket a vivőhullámokat (carrier) különböző kódokkal modulálják annak érdekében, hogy információkat továbbíthassanak a vevők felé. A kódok +1 és -1 értékekből álló sorozatok, a kettes számrendszerbeli 0 és 1 számjegyeknek megfelelően. A kódolás elve a fázis billentyűzés ( biphase modulation ), azaz a vivőhullám fázisának 180 fokkal való eltolása akkor, ha a kód értéke ( +1 vagy -1 ) változik. A fázisbillentyűzés elvét az alábbi ábra szemlélteti. A vivőhullám modulálásakor kétféle kódolást alkalmaznak. A C/A kód ( coarse/acquisition code ) frekvenciája f 0/10, azaz MHz - es frekvenciával követik egymást a +1 és -1 értékek. A kódsorozat minden ezredmásodpercben ismétlődik, és minden GPS hold esetén különböző. Ez teszi egyértelműen azonosíthatóvá a holdakat. A P - kód (precision code) frekvenciája megegyezik az f 0 alapfrekvenciával, és naponta ismétlődik. A holdak azonosítását itt az teszi lehetővé, hogy a kód " mintája" minden hold esetében egyedi. A P - kód teljes, napos ciklusának 7-7 napos darabját rendelték hozzá egy egy GPS holdhoz. A kód generálása minden vasárnap éjfélkor, a GPS hét kezdetén újra indul. A mesterséges holdakat azonosító PRN ( pseudorandom noise ) szám éppen arra utal, hogy a teljes P - kód melyik egyhetes szakaszát rendelték a holdhoz.

3 Néhány éve új fogalom került a köztudatba, ez az Anti -Spoofing ( A - S). Az Anti Spoofing a P kód titkosítása annak elkerülése céljából, hogy valaki hamis információ sugárzásával illetéktelenül beavatkozhasson a rendszerbe. A titkosítás eredménye az Y kód, melyet csak a titkos konverziós algoritmus ismeretében lehet megfejteni. 3. A JELFELDOLGOZÁS ALAPELVEI Eddig a GPS holdak jelsugárzásának módjairól beszéltünk. A felhasználó számára legalább ilyen fontos kérdés, hogy hogyan juthat hozzá a jelek által hordozott információhoz, azaz hogyan működik a GPS vevő. A GPS két típusú mérést képes végezni. Az egyik az úgynevezett kód korrelációs technika, amely megkívánja legalább az egyik PRN kód ismeretét, a másik a kód nélküli technika. Minkét eljárás alkalmas a vivőhullám rekonstruálására, így annak fázisa meghatározható. A kód korrelációs technika a modulálatlan vivőhullám mellett a jel többi komponensét ( navigációs üzenet, órajel ) is megfejthetővé teszi. Az eljárás alaplépései a következők: - referencia rezgés keltése a vevőben - a referencia rezgés modulálása az ismert PRN kóddal - az ilyen módon kódolt referencia jel összehasonlítása ( korrelálása ) a műholdról vett jellel; a két jel kközötti időeltolódás (D t ) jelenti a műholdról érkező hullámok terjedési idejét - a kód eltávolítása a vett jelből, így a navigációs üzenet dekódolható, majd kiszűrhető - megmarad a modulálatlan vivőhullám, a fázismérés végrehajtható. Amennyiben a C/A kódot ismeri a vevő, az L1 vivőhullám rekonstruálható. A P kód ismeretében az L1 és L2 is. A kód nélküli eljárás a bejövő jelek négyzetelésén ( squaring ) alapul. A kódolás, vagyis a moduláció eltűnik, mivel a kódok +1 és -1 jelsorozatai négyzetre emelés után +1-et adnak. A moduláció megszűnése mellett a frekvencia megkétszereződése érdemel figyelmet. A négyzetelő eljárás előnye hogy független a kódoktól, hátránya hogy a jel/zaj viszony csökken. A két technika együttes alkalmazása is elképzelhető: az L1 vivőhullám rekonstruálása a C/A kód korrelációval, az L2-é négyzeteléssel. A GPS mérési adatok valójában távolságok, amelyek a vevőben eőállított, illetve a vett jelek összehasonlításával, idő- és fáziskülönbség mérése alapján határozhatunk meg. A GPS mérés egyutas módszer, amelyet a műhold és a vevő órajárási hibái befolyásolnak. Ezért a GPS-mérte, órahibákkal terhelt távolságokat pszeudo távolságoknak, ( pseudorange, áltávolság) nevezzük. 4. HELYMEGHATÁROZÁSI MÓDSZEREK A meghatározási módszereket az alábbiak szerint csoportosíthtjuk: - abszolút vagy relatív - statikus vagy kinematikus Az abszolút helymeghatározás egy független, egypontos meghatározás, ahol a koordinátákat kódmérésből, pszeudotávolság meghatározásból kapjuk a WGS-84 koordinátarendszerben, a méréssel egyidőben. Ehhez a mérési módszerhez egy vevőkészülék szükséges.

4 A relatív helymeghatározás a pszeudotávolság, vagy vivőfázis szimultán mérését jelenti két vagy több ponton, ugyanazon holdakra. Ehhez a mérési módszerhez legalább két vevőkészülék szükséges. Fázismérésnél a relatív pontosság 1 ppm. A kapott koordináták a referenciaponthoz viszonyított értékek. Statikus mérési módszernél a vevő az észlelés teljes ideje alatt helyben marad, tehát sok fölös mérési eredmény adódik. Kinematikus módszernél a vevőkészülék folyamatosan mozog, fölös mérés nincs. Az abszolút statikus módszernél 1s-os mérési idő alatt a helymeghatározás pontossága valósidejű mérésnél: C/A kóddal: P kóddal: 20-50m 5-20m Ha a mérési adatok feldolgozását később végezzük, és pontos pályaelemekkel számolunk,akkor amegbízhatóság 2-5m lesz. Mivel a C/A kód használata 10-es faktorral gyengíti a pontosságot, P kód használata civil alkalmazóknak nem áll rendelkezésére, ezért ezt a meghatározási módot geodéziai merésekhez nem használjuk. Az abszolút - kinematikus módszerrel 1 ms -os mérési idő alatt a maximálisan elérhető pontosság méter. E pontosság eléréséhez a mozgásban lévő vevőnek folyamatosan, szimultán 4 műholdra kell mérnie. Ez a mérési módszer széleskörűen elterjedt a vízi, szárazföldi és léginavigációban. Ezzel a módszerrel a járművek mozgási pályáját lehet meghatározni. A relatív statikus módszernek van a legnagyobb jelentősége geodéziai szempontból, főleg fázismérés esetében, mert így érhető el maximális pontosság GPS -szel. Rövidebb bázisok esetében centiméter alatti. Precíz pályaelemeket használva a pontosság tovább javulhat, elérheti akár a 0.01 ppm -et is.ez a módszer széleskörűen alkalmazható alappontsűrítésnél, hagyományos terepfelméréseknél, ipari geodéziában, fotogrammetriában. A relatív - kinematikus módszer alkalmas a vevő útvonalának rövid idö alatt való meghatározására. A mérést egy álló, és egy mozgó vevővel végezzük. A mérés kezdetekor két ismert ponton abszolút kinematikus módszerrel meghatározzuk a koordinátákat. Ezután az egyik vevőantennát a kezdőponton hagyjuk, a másikkal pedig pontról pontra haladva folyamatos mérést végzünk.egy - egy új ponton megállva, a mérés időtartama néhány másodperctől 1 percig terjedhet. Vivőfázis mérésekor az elérhető pontosság néhány centiméter, kódméréssel néhány méter. Mivel ezzel a módszerrel nagy számú pont gyors és pontos meghatározása lehetséges, nagy jövője van a geodéziában. A kinematikus módszernek több változatát is kidolgozták, melyeket a különböző elnevezéseikkel ismertetek. Stop and go ( félkinematikus módszer ) Ez a módszer a statikus és a kinematikus relatív helymeghatározások kombinációja. A mérés során az egyik vevő végig egy ponton áll, a másik az új pontok között mozog, majd rövid időre az új ponton megáll. A módszer jellemzője, hogy a meghatározás pontossága az álló helyzetben végzett mérésnél növekszik, mivel az eredmény több mérési adat átlagából születik. Ezt a mérési módszert gyakran csak kinematikus felmérésnek nevezik. ( kinematic surveying )

5 Pszeudokinematikus, vagy megszakított kinematikus módszer Az új pontokon sorban, egymás után mérnek, majd mintegy egy óra elteltével fordított sorrendben újra mérnek. Í gy lehetővé válik a többértelműség felolása, javul a pontosság. Ennek oka, hogy a várakozási időben változik a holdak konstellációja. E mérésnél a pontok közötti átállás időtartamára a vevők kikapcsolhatók. Ez a mérési módszer reokkupációs módszer néven is ismert. ( reoccupation method ) Gyors statikus módszer Itt a gyors inicializáláshoz, azaz a többértelműség feloldáshoz a kód - és vivőfázis mérések kombinációját alkalmazzák. Itt az egyébként hagyományos statikus módszerrel végzett mérésnél mindkét frekvencián mérni kell a vivőfázist, és a kódot is perces mérés után 1 ppm megbízhatóság érhető el.( fast static, rapid static) On the fly ( OTF ) módszer Ez egy inicializálási módszer, melyet főleg kinematikus méréseknél alkalmazunk. Ez a kóddal segített technika, amely a többértelműség feloldására szolgál, lehetővé teszi mozgó járművek helyzetének deciméter, sőt centiméter pontosságú meghatározását.
 Gyors statikus módszer Itt a gyors inicializáláshoz, azaz a többértelműség feloldáshoz a kód - és vivőfázis mérések kombinációját alkalmazzák.")
6 5. MILYEN PONTOS A GPS? Aki először érdeklődik a GPS technika iránt, nem mulasztja el feltenni a kérdést: milyen pontosságú pontmeghatározás érhető el GPS - szel? A válasz nem egyszerű. Ennek az az oka, hogy a GPS - nek sokféle gyakorlati alkalmazása létezik. Minden alkalmazásnak más a célja, technikai feltétele, és ezért a pontossága is. Ahhoz, hogy az adott célnak, a megkívánt pontosságnak legmegfelelőbb módszert választhassuk, el kell igazodnunk a GPS mérési módszerek között. Ezt a tájékozódást segíti néhány alapvető fogalom definíciója (Hofmann-Wellenhof, 1992 alapján) és egy grafikon, amelyről a helymeghatározás pontosságára vonatkozó adatok leolvashatók. ( Stansell, 1988 ) A kódmérésről és a vivőfázis mérésről már volt szó. Emlékeztetőül annyit, hogy a kódmérés pontossága durván méteres, a fázismérésé milliméteres nagyságrendű. A fázismérésnél fellép a többértelműség problémája, melynek feloldására számos megoldás született, a kutatás tárgya ma is. A valós idejű (real - time) alkalmazások megkövetelik, hoga a vevő azonnal, a mérés helyszínén, rövid időn belül határozza meg helyzetét. Az azonnal szigorúbb definíciója azt jelenti, hogy egyetlen időpontban végzett mérés alapján, elhanyagolhatóan rövid számítási idő után szolgáltassa a vevő pozícióját. A GPS eredeti koncepciója ugyanis mozgó jármű ( hajó, repülőgáp, autó, stb ) valós idejű navigációja. Utólagos feldolgozással ( postprocessing ) a lehetőségek bővülnek. A tárolt mérési adatokat kombinálni lehet más pontokon mért adatokkal, így bizonyos hibaforrások jelentősen csökkenthetők, a pontosság növelhető. Egyedi pontmeghatározásról ( point positioning ), vagy a magyar szakirodalomban elterjedt kifejezéssel élve abszolút pontmeghatározásról akkor beszélünk, ha egyetlen ponton álló vevővel, általában kód korrelációs technikával egyszerre minimálisan négy GPS holdra végzünk méréseket, és a pont koordinátáit ezekből számítjuk ki. A relatív pontmeghatározás előfeltétele, hogy legalább két ponton folyjon fázismérés ugyanazon GPS holdakra. Az egyik pont koordinátái rendszerint nagy pontossággal ismertek ( ez a referencia pont ), a másikéi ismeretlenek. A módszer valójában a két pont közötti vektort adja meg, innen a relatív elnevezés. A feldolgozási módszer a mérésekből képzett különbségekkel való számításon alapul, melynek során bizonyos hibák eltűnnek, vagy hatásuk jelentősen csökken. Szokás differenciális pontmeghatározásról beszélni, ha hasonló eljárást alkalmazunk, kódméréssel kapott pszeudo távolságok felhasználásával. A " relatív" és " differenciális" elnevezések sajnos sokszor keverednek egymással. Statikus pontmeghatározás alatt azt értjük, hogy a vevő a mérendő ponton áll, míg kinematikus tecnikáról van szó, ha a vevő mozog mérés közben. Néhány tipikus mérési módszert sorolunk fel: - statikus abszolút pontmeghatározás Viszonylag rövid mérési idő után, mérsékelt ( 5-10 m ) pontosságot érhetünk el, kódméréssel. - kinematikus abszolút pontmeghatározás A kódmérések felhasználásával, mozgó járművek helyzetét m-es pontossággalhatározhatjuk meg. - statikus relatív pontmeghatározás Vivőfázis mérések felhasználásával történik. A geodéziában ez a leggyakrabban alkalmazott módszer, melynek segítségével a GPS szélső pontossága ( 1 ppm ppm ) elérhető. 1 ppm ( egy milliomodrész ) pontosság néhány kilométeres bázisvonalon néhány milliméter hibát jelent. Két vagy több álló vevő közötti vektor meghatározásán alapul. Az így kapott koordináták természetesen öröklik a referencia pont koordinátáinak esetleges pontatlanságát. - kinematikus relatív ( vagy differenciális ) pontmeghatározás
 és egy grafikon, amelyről a helymeghatározás pontosságára vonatkozó adatok leolvashatók.")
7 Egy álló referencia vevő, és egy mozgó műszer ( rover ) szimultán mérése. A relatív technika miatt a pontosság nagyobb mint az abszolút eljárás esetén. Fázismérés esetén a pontosság elérheti a centiméteres, kódméréssel ( ezt nevezzük differenciális technikának ), a méteres nagyságrendet. A szakaszok közepén lévő kör jelzi a legvalószínűbb értéket, az eredmények 5-5 % -a lehet roszabb ill. jobb, mint amit a szakaszok két végpontja jelöl. Felhasznált irodalom: Földmérési és Távérzékelési Intézet Kozmikus Geodéziai Obszervatórium GPS tanfolyam jegyzet

8 A GPS-rendszer
9 Mi a GPS? A GPS (Global( Positioning System) ) Globális lis Helymeghatároz rozó Rendszer, az Amerikai Egyesült Államok DoD (Departement of Defence) ) Védelmi V (Elhárítási) Minisztériuma által (elsődlegesen katonai célokra) c kifejlesztett és üzemeltetett - a Föld bármely b rmely pontján, n, a nap 24 órájában működőm - műholdas helymeghatároz rozó rendszer.. A rendszer előnye, hogy független: f - időjárást stól - napszaktól - légköri viszonyoktól - földfelszín n feletti magasságt gtól - mozgási sebességt gtől l (a műszerrel m akár vadászg szgépen is mérhetm rhetünk)

10 A GPS előzm zményei Az ember már m r a kezdetek óta érdeklődött a helye, helyzete iránt a Földön. Az első "helymeghatároz rozásra" irányul nyuló törekvések már m r a korai ókorban jelentkeztek. Az utazók, felfedezők, hogy el ne tévedjenek, megjelölt lték k a megtett utat, pl. útmenti kövekkel, vagy festékkel. Ha azonban az eső lemosta a festéket, vagy a hóh belepte a köveket, k felfedezőnk nagy valósz színűséggel örökre elveszett. Igaz, a Föld F akkor még m g "lapos" volt és s korong alakú, mely korong szélein leinél l a nagy űr r tátongott. t tongott. Az akkoriban utazók részére re - hogy véletlenv letlenül l se "essenek le" a Föld F szélénél - megfelelő leírások, utalások készk szültek. Ezek a leírások általában a környezet, a mindenki által láthatl tható tereptárgyak rgyak leírásai sai voltak. Később, amikor az emberiség g elkezdett utazgatni és s beindult a "korai turizmus", a földf ld-kép p kezdett egyre nőni, n ni, gömbg mbölyödni. A tengereken, óceánokon hajózni kellett, már m r nem voltak elegendők az útleírások, itt már m r nem lehetett útjelző köveket veket használni. A csillagászati szati navigáci ció,, az égitestek (Nap) magasságának meghatároz rozása kezdett fejlődni. Ezen helymeghatároz rozási módszerek pontossága (néhány ny mérfm rföld) a korabeli igényeknek megfelelt, azonban kötött k tt volt: ha borús s idő volt, nem lehetett a Nap magasságát t megmérni, ha megállt a kronométer - megállt a tudomány, éjszaka, ha nem volt derűs s az ég, könnyen k el lehetett tévedni a tengereken, vagy a sivatagokban...

11 A fenti problémák k kiküsz szöbölésére tökéletesedtek t a kronométerek, irányt nytűk, de az igények növekedn vekedésével vel már m r ezek sem voltak elegendőek. ek. Kb. 100 évvel ezelőtt, már m üzeneteket lehetett eljuttatni fizikailag össze nem kötött k tt helyek között, k valós időben is (drótn tnélküli li távíró). t Innen már m r csak egy ugrás s a távirányítás. A távirt virányítás s fejlődésének feltétele tele volt az is, hogy a távirányított szerkezetek helyét t mindig pontosan meg lehessen határozni. A kezdetleges megoldások után n a rádir diózás beindulásával, a hang sebesség g mérésének m felfedezésével (Doppler), majd alkalmazásával a navigáci ciós s helymeghatároz rozó rendszer is egyre tökéletesedett. t A hajózásn snál l a hajók, jachtok irány nyítására kifejlesztették k a LORAN és s a DECCA rádiónavigációs "lánch nchálózatot". Ezek megfelelőek ek voltak olyan helyeken, ahol a LORAN láncok l ki voltak építve, de pontosságuk függf ggött a rádióinterferenciás s zavaroktól, a földrajzi f helyzettől l stb. Ahol pedig nem volt fogható az adás... Néhány újabb évtized, és s az ember uralja (?!) a világűrt. Természetesen a fizika és s a társtudomt rstudományok (elektronika) rohamos fejlődése a navigáci ció fejlődésére is kihatott. Megjelent az első műholdas helymeghatároz rozó rendszer a Transit System vagy "Sat-Nav"" (a GPS előfut futára). Ez a rendszer már m r az emberi kéz k alkotta "csillagok, holdak" magasságát t mérte. m A nehéz z kezdet után n (hisz ezek az alacsony pályp lyás s műholdak m úgy hullottak mint "az őszi légy") l lassan kialakult a mai értelemben vett GPS.
, majd alkalmazásával a navigáci ciós s helymeghatároz rozó rendszer is egyre")
12 A GPS alapok A GPS egy magasszintű helymeghatároz rozó rendszer, amellyel 3 dimenziós helyzetmeghatároz rozást,, időmérést és s sebességm gmérést végezhetv gezhetünk földf ldön, vízen vagy levegőben. Pontossága jellemzően en méteres m nagyságrend grendű,, de differenciális mérési m módszerekkel m akár r mm pontosságot is el lehet érni, valós s időben is. A rendszer előnye, hogy a helymeghatároz rozás s nagy magasságban gban keringő műholdak (24 db.) segíts tségével törtt rténik, így a rendszer folyamatos mérési m lehetőséget biztosít t bármilyen b közegben, k napi 24 órában. A rendszer fejlesztése se és s feláll llítása igen nagy összegeket emésztett fel (indításkor kb. 12 milliárd USD), magas műszaki m fejlettséget követel, így nem csoda, ha az USA védelmi v minisztériuma a mecénás. Mivel annak idején n (1970), amikor a rendszert elkezdték k fejleszteni, ez már r része r volt az ún. "csillaghábor borús s tervnek", szigorúan titkos volt. Idővel csökkentek a pénzp nzügyi források, megindult a politikai "felmelegedés", a rendszer kezdett egyre nyíltabb ltabbá válni, annyira, hogy már r néhány n ny éve akárki (akinek van rár pénze, hisz nem olcsó műszer) megveheti. A műszer m megvétele után n annak beüzemel zemelése percek kérdk rdése. Ma főbb f felhasználói i a katonaság g mellett: - az űrkutatás - a navigáci ció - a geodézia - a közlekedk zlekedés - a földtudomf ldtudományok - az erőforr forrás s kutatások - valamint az expedíci ciós s kutatók. k.
 segíts tségével törtt rténik, így a rendszer folyamatos mérési m lehetőséget biztosít t bármilyen b közegben, k napi 24 órában.")
13 Hogyan működik m a GPS? A GPS működésének m alapelvei igen egyszerűek. ek. Ezeknek az ötleteknek a gyakorlatba való álültetéséhez, valamint a rendszer rendkívül l pontos működéséhez napjaink legfejlettebb technikájára van szüks kség. A rendszer felépítése: - 24 db, 12 órás s keringési idejű műholdból l (6 pályasp lyasíkon egymáshoz képest 60 fokkal elforgatva, az egyenlítőhöz z viszonyított pályaelhajlás s 55 fok), - 5 db földi f ún. monitor állomás, 4 feltölt ltő és s 1 központi k vezérl rlő - GPS vevőberendez berendezés, amelyből l számtalan lehet, a Föld F bármely b pontján A műholdas m helymeghatároz rozó rendszer gyakorlatilag egy "egyszerű" időmérésb sből l kiszámított távolst volságmérésen alapul. Mivel ismerjük k a rádióhullámok terjedési sebességét, ha van két k t nagyon pontos óránk, és s ismerjük k a rádir dióhullám m kibocsátásának és s beérkez rkezésének idejét, ezek alapján n meghatározhatjuk a forrás s távolst volságát. Ez a meghatároz rozási módszer nem egyszerű folyamat. Az áttekinthetőség g kedvéé éért az alábbi főbb részekre r bontjuk e technikát: t: Az adott helyzetű műholdaktól l való távolságok ismeretében a keresett pont koordinátáinak inak számítása sa Távolságmérés s rádir dióhullámok segíts tségével A távmt vméréshez szüks kséges igen nagy pontosságú időmérés A műhold m pontos helyének meghatároz rozása A GPS jel ionoszférikus és s atmoszférikus késleltetk sleltetésének és s torzításának figyelembevétele

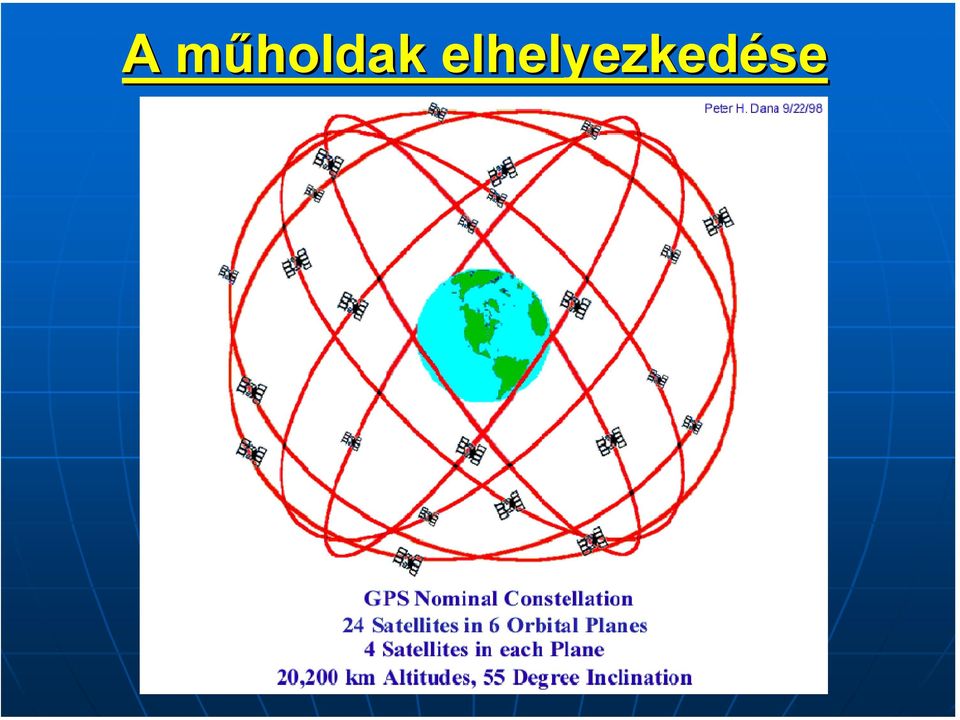
14 A műholdak m elhelyezkedése
15
16 A GPS alapötlet A GPS rendszer lényege l a műholdas m távolst volságmérés. Ha ismerjük k néhány n ny műholdtól l való pontos távolst volságunkat és s egy (a referenciapontként nt szolgáló) ) műhold m helyét, saját t helyzetünket a következk vetkezőképpen számíthatjuk ki: Tegyük k fel, hogy tudjuk azt, hogy egy műhold m tőlünk t X km távolst volságra van. Ha csak ez az adat volna a birtokunkban ez azt jelentené,, hogy mi a térben egy X km-es sugarú gömb felület letén n volnánk nk valahol. Tegyük k fel, hogy egy másik m műhold m tőlünk t Y km távolst volságra van. Matematikai törvt rvényszerűségek tudatában ilyenkor a lehetséges helyzetünk csakis az X és s az Y sugarú gömbök k metszetén n keletkező körön lehet valahol. Egy harmadik műholdtm holdtól l való távolság g ismerete esetén n a lehetséges poziciónk száma kettőre csökken! Általában e két k t pont közül k l az egyik vagy irreálisan messze van a Föld F felszínétől, l, vagy mélyen m a Föld F gyomrában van, ebből l adódik, dik, hogy a másik m a mi poziciónk nk.. Azt, hogy e két k t pont közül l melyik a helyes, más m s módszerrel m is eldönthetj nthetjük: 1., mérjm rjük k egy negyedik műholdtm holdtól l való távolságunkat (a negyedik gömb g csak a mi pontunkat metszheti) 2., ha a tengeren vagyunk (tengerszint feletti magasság=0m), g=0m), felhasználva lva az ismert Föld(gF ld(gömb)sugarát t a keresett pont meghatározhat rozható Mint látjuk l általában elegendő 3 műholdtm holdtól l való távolság g ismerete, de a gyakorlatban mégis m négyet n használunk, hogy miért, a későbbiek k során erre külön k n kitérek.

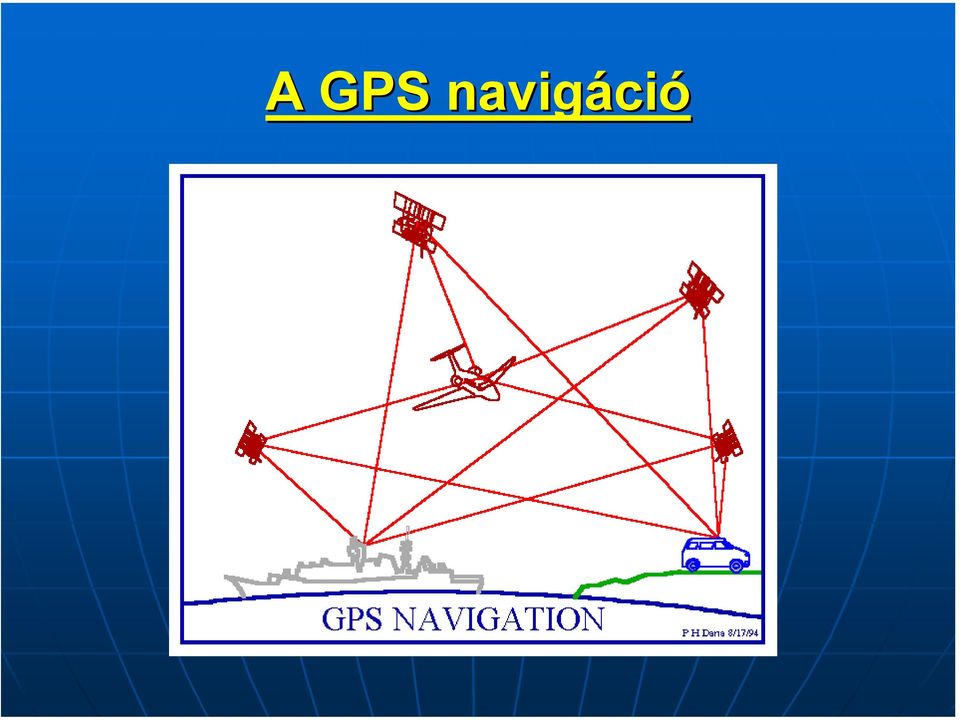
17 A GPS navigáci ció
18 A műholdaktm holdaktól l való távolság meghatároz rozása A műholdaknak m a vevőkész szüléktől l való távolsága egyszerűen en a műholdak m által kisugárzott jelek beérkez rkezési idejéből l számíthat tható ki (sebesség g x idő = távolst volság). g). Mivel tudjuk azt, hogy a rádir dióhullámok fénysebessf nysebességgel terjednek, így a nagyon nagy terjedési sebesség g miatt, nagyon pontos időmérésre van szüks kségünk. Ha a meghatározand rozandó műholdunk zenitben van, akkor kb másodperc alatt ér r le a mérőm jel róla, r gyakorlatilag tehát t a vevő mérő órájának másodperc m pontossággal kell mérnie m a cm-es mérési m pontosság g eléréséhez. Adódik dik egy másik m probléma is, nevezetesen: ismernünk nk kell a kibocsátott mérőjel m indulásának nak időpontj pontját. t. A fejlesztők ezt a problémát úgy oldották k meg, hogy mind a műhold, m mind a vevő ugyanazt a jelet generálja szinkronban egymással. A vevő összehasonlítja a beérkezett rkezett jelet a sajátj tjával, és s méri m a késési k si időt. Ehhez olyan jelet kell alkalmazni, amellyel bármely b pillanatban meghatározhat rozható az időkülönbs nbség. A GPS rendszer különbk nböző periódus dusú pszeudo-véletlen (pseudo-random)) kódokat k használ. Ezek az ún. P-P és s C/Akódok.

19 A GPS irány nyítás, vezérl rlés

20 A GPS-jel A műhold m két k t mikrohullámú jelet küld k a vevő felé. Ezek az L1 és s L2 frekvenciák. k. Az L1 frekvencia 1575,42 MHz. Az L2 frekvencia 1227,60 MHz. Az L1-en küldi k a navigáci ciós s adatokat és s az SPS-kód jelet Az L2-n n küldi k az ionoszférikus és s más m s zavaró tényezőkből l adódó módosítás s adatait és s a PPS-kód jelet.

21 SPS: Standard Positioning Service Világszerte ezt alkalmazzák k a civil életben. Az SPS jellemzői: méter m vízszintes v pontosság méter m függf ggőleges pontosság nanosecundum időbeni pontosság PPS: Precise Positioning Service Nagyobb pontosságú mérést engedélyez, mint az SPS. Az amerikai védelmi v erők által meghatározott és s alkalmazott mérési pontosság g előírásait tartalmazza. A PPS jellemzői: - 22 méter m vízszintes v pontosság - 27,7 méter m függf ggőleges pontosság nanosecundum időbeni pontosság
22
23 Az időmérés Ha tudjuk azt, hogy a rádir dióhullámok a fény f sebességével terjednek, és s feltételezz telezzük, hogy a GPS vevőnk és s a műhold m között 0.01 másodperces m szinkronizálási si hiba keletkezett, akkor könnyen kiszámíthat tható,, hogy a mérésünk m hibája 3000 km lesz! Hogyan mérjm rjünk akkor tökéletesen t? Az adóoldalon viszonylag egyszerű a megoldás s hiszen a műholdakon m 4 atomóra működik (rubídium és s cézium), c melyek rövid r idejű frekvencia stabilitása sa Ezeknek az óráknak az ára USD nagyságrend grendű.. A pontosságuk is megfelelő.. Marad a vevő oldali órák k pontosságának nak növeln velése. Természetesen nem alkalmazhatunk minden GPS vevőben atomórát t (csak az ára az oka), de egy kis ügyes csellel, egy egyszerűbb olcsóbb "sima kvarcóra" ra" is megteszi. Ez a kis csel tulajdonképpen az, hogy + 1 mérést m kell végeznv geznünk nk (még g egy műhold m szüks kséges). Az előző fejezetekben már m r említett + 1 mérés m s segíts tségével kiegyenlíthetj thetjük k a vevőoldali időmérési hibát. Magyarázat (csak 2 dimenzióra, de természetesen érvényes 3D- ben is): Mint eddig sokszor, most is matematikai magyarázat van a dolgok hátterében: trigonometriai összefüggés állítja, hogy térben t egy pontot meghatározhatunk 3 pontos méréssel, m vagy 4 olyan pontatlan méréssel m amelynél l a mérési m hiba konstans.
24 A műholdakm Az előző pontokban feltételezt teleztük, hogy pontosan tudjuk a műholdak m távolságát, hogy hol helyezkednek el. De hogyan határozhatjuk meg egy kb km távolst volságra lévől objektum helyét t akár r mm pontosan? A pontosság g titka a nagy távolst volság. A műhold m jóval j a földi f atmoszféra felett kering, így pályp lyája igen nagy pontossággal kiszámíthat tható.. A szatellitek pályára állítása igen nagy precizitással törtt rténik. Mivel ezen műholdak m pályája igen nagy pontossággal előre meghatározhat rozható, így sok GPS vevő memóri riájában megtalálhat lható az ún. almanach, amely tulajdonképpen a műholdak pillanatnyi helyzetét t tartalmazza (matematikai formulák képében). Noha a pályp lyák k matematikai modellje önmagában is igen pontos eredményt szolgáltat, ltat, de a precízs zség g növeln velése érdekében az USA védelmi v minisztériuma (DoD( DoD) ) létrehozta l a földi f figyelő és s követk vető hálózatát, t, amely feladata a GPS műholdak m követk vetése, napi vizsgálata, aktuális pozíci cióik ik és sebességük k mérése, m az esetleges pályap lya- és s egyéb b korrekciók k végrehajtv grehajtása és s a pontosított tott adatoknak (pl. almanach) a műholdakra m törtt rténő eljuttatása. Az ún. ephemeris hibák nagyon kicsik, de nem elhanyagolhatók, oka a Nap és s a Hold gravitáci ciós s mezeje valamint a szoláris radiáci ció hatása. A GPS műholdak m nemcsak az időzítő jelet sugározz rozzák, hanem adatüzeneteket is sugároznak a GPS vevők k számára. Ezek a jelek tartalmazzák k az ún. almanach adatokat, a korrekciós s pályaadatokkal p valamint a rendszerinformáci ciókkal. Ha egy műhold m nagyon eltér r a számított pályp lyától, l, akkor a Földi F irány nyító központból l ki lehet ideiglenesen kapcsolni, hogy ne zavarja a pontos méréseket, m majd miután n a műhold m ún. pályakorrekcip lyakorrekciós meghajtóművével vel visszaáll a számított pályp lyára, újra fel lehet "éleszteni"." A jobb minőségű GPS vevők k automatikusan rögzr gzítik és s alkalmazzák k az almanachban foglalt korrekciókat, kat, a pontosabb műhold m pozíci ciók k számítására.
25 A GPS műholdak m műszaki m adatai: Név: NAVSTAR Gyárt rtó: Rockwell International Magasság: g: km Súly: 850 kg (pály lyára állás s után) Méret: kb. 6 méter m a nyitott napelemekkel Keringési idő: : 11 óra 58 perc Elhelyezkedés: 6 pályasp lyasík, egymáshoz képest k 60 fokkal elforgatva, 55 fokos pályasp lyasík-elhajlás s az egyenlítőhöz z képest k Tervezett élettartam: kb. 7.5 év Keringő példányok: állandóan változnak, v ma még m kb. 10 db. ún. Block I prototípus pusú műhold van az űrben, amit folyamatosan felváltanak ltanak Block II típusúakra. Konstelláci ció: : 24 műhold m
26 A műholdm
27 A földi f monitor állomások A monitorállom llomások feladata, hogy nyomonkövess vessék, és s adatot szolgáltasson ltasson a műhold pontos helyéről és s helyzetéről. l. 1 fő-f és s 4 segédállom llomás s találhat lható.
A távérzékelésről. A műholdas helymeghatározás GPS 2012.05.18. 1
 A távérzékelésről. A műholdas helymeghatározás GPS 2012.05.18. 1 A térbeli adatok meghatározása elsődleges geometriai adatnyerési eljárások, másodlagos adatnyerési eljárások 2012.05.18. 2 Az elsődleges
A távérzékelésről. A műholdas helymeghatározás GPS 2012.05.18. 1 A térbeli adatok meghatározása elsődleges geometriai adatnyerési eljárások, másodlagos adatnyerési eljárások 2012.05.18. 2 Az elsődleges
Alapok GPS előzmnyei Navstar How the GPS locate the position Tények Q/A GPS. Varsányi Péter
 Alapok előzmnyei Navstar How the locate the position Tények Q/A Óbudai Egyetem Alba Regia Egyetemi Központ (AREK) Székesfehérvár 2011. december 8. Alapok előzmnyei Navstar How the locate the position Tények
Alapok előzmnyei Navstar How the locate the position Tények Q/A Óbudai Egyetem Alba Regia Egyetemi Központ (AREK) Székesfehérvár 2011. december 8. Alapok előzmnyei Navstar How the locate the position Tények
GPS. 1.a A GLONASS rendszer. Feladata. A rendszer felépítése. A GLONASS és s a GALILEO GPS- rendszerek. Céljaiban NAVSTAR GPS rendszerhez
 GPS A GLONASS és s a GALILEO GPS- rendszerek Összeállította: Szűcs LászlL szló 1.a A GLONASS rendszer Globális lis Navigáci ciós s Műholdrendszer M orosz elnevezés s rövidr vidítése Céljaiban és s kialakításában
GPS A GLONASS és s a GALILEO GPS- rendszerek Összeállította: Szűcs LászlL szló 1.a A GLONASS rendszer Globális lis Navigáci ciós s Műholdrendszer M orosz elnevezés s rövidr vidítése Céljaiban és s kialakításában
TestLine - nummulites_gnss Minta feladatsor
 1.* Egy műholdas helymeghatározás lehet egyszerre abszolút és kinematikus. 2.* műholdak pillanatnyi helyzetéből és a megmért távolságokból számítható a vevő pozíciója. 3.* 0:55 Nehéz kinai BEIDOU, az amerikai
1.* Egy műholdas helymeghatározás lehet egyszerre abszolút és kinematikus. 2.* műholdak pillanatnyi helyzetéből és a megmért távolságokból számítható a vevő pozíciója. 3.* 0:55 Nehéz kinai BEIDOU, az amerikai
Hegyi Ádám István ELTE, április 25.
 Hegyi Ádám István ELTE, 2012. április 25. GPS = Global Positioning System Department of Defense = Amerikai Egyesült Államok Védelmi Minisztériuma 1973 DNSS = Defense Navigation Satellite System vagy Navstar-GPS
Hegyi Ádám István ELTE, 2012. április 25. GPS = Global Positioning System Department of Defense = Amerikai Egyesült Államok Védelmi Minisztériuma 1973 DNSS = Defense Navigation Satellite System vagy Navstar-GPS
INFORMATIKA ÁGAZATI ALKALMAZÁSAI. Az Agrármérnöki MSc szak tananyagfejlesztése TÁMOP-4.1.2-08/1/A-2009-0010
 INFORMATIKA ÁGAZATI ALKALMAZÁSAI Az Agrármérnöki MSc szak tananyagfejlesztése TÁMOP-4.1.2-08/1/A-2009-0010 10. GPS, GPRS (mobilkommunikációs) ismeretek Helymeghatározás GPS rendszer alapelve GNSS rendszerek
INFORMATIKA ÁGAZATI ALKALMAZÁSAI Az Agrármérnöki MSc szak tananyagfejlesztése TÁMOP-4.1.2-08/1/A-2009-0010 10. GPS, GPRS (mobilkommunikációs) ismeretek Helymeghatározás GPS rendszer alapelve GNSS rendszerek
Babeș Bólyai Tudományegyetem Informatika kar Műholdas helymeghatározás a GPS rendszerrel
 Babeș Bólyai Tudományegyetem Informatika kar Műholdas helymeghatározás a GPS rendszerrel Szűcs Attila Levente Kolozsvár, 2010 Április 29. 1. Bevezető A GPS az angol Global Positioning System megnevezés
Babeș Bólyai Tudományegyetem Informatika kar Műholdas helymeghatározás a GPS rendszerrel Szűcs Attila Levente Kolozsvár, 2010 Április 29. 1. Bevezető A GPS az angol Global Positioning System megnevezés
HÍRADÁSTECHNIKA I. Dr.Varga Péter János
 6. HÍRADÁSTECHNIKA I. Dr.Varga Péter János 2 Műholdas kommunikáció 3 4 Helymeghatározás 5 Alkalmazott műholdpályák, tulajdonságaik 6 Alkalmazott műholdpályák, tulajdonságaik A LEO [Low Earth Orbiter ]
6. HÍRADÁSTECHNIKA I. Dr.Varga Péter János 2 Műholdas kommunikáció 3 4 Helymeghatározás 5 Alkalmazott műholdpályák, tulajdonságaik 6 Alkalmazott műholdpályák, tulajdonságaik A LEO [Low Earth Orbiter ]
Híradástechnika I. 5.ea
 } Híradástechnika I. 5.ea Dr.Varga Péter János 2 Műholdas kommunikáció 3 4 Alkalmazott műholdpályák, tulajdonságaik 5 Alkalmazott műholdpályák, tulajdonságaik A LEO [Low Earth Orbiter ] magába foglalja
} Híradástechnika I. 5.ea Dr.Varga Péter János 2 Műholdas kommunikáció 3 4 Alkalmazott műholdpályák, tulajdonságaik 5 Alkalmazott műholdpályák, tulajdonságaik A LEO [Low Earth Orbiter ] magába foglalja
Térinformatika. Adatgyűjt. koordinátarendszer. feladatok szegmensek. Geometriai adatok gyűjt. Adatnyerés. Műholdas helymeghatároz NAVSTAR-GPS rendszer
 Adagyűj jés Térinformaika Műholdas helymeghaároz rozás: NAVSTAR-GS rendszer Összeállíoa: Dr. Szűcs LászlL szló és s Gregori Ákos Geomeriai adaok gyűj jése Aribúum um adaok gyűj jése Adanyerés elsődleges
Adagyűj jés Térinformaika Műholdas helymeghaároz rozás: NAVSTAR-GS rendszer Összeállíoa: Dr. Szűcs LászlL szló és s Gregori Ákos Geomeriai adaok gyűj jése Aribúum um adaok gyűj jése Adanyerés elsődleges
A PPP. a vonatkoztatási rendszer, az elmélet és gyakorlat összefüggése egy Fehérvár környéki kísérleti GNSS-mérés tapasztalatai alapján
 GISopen konferencia, Székesfehérvár, 2017. 04. 11-13. A PPP a vonatkoztatási rendszer, az elmélet és gyakorlat összefüggése egy Fehérvár környéki kísérleti GNSS-mérés tapasztalatai alapján Busics György
GISopen konferencia, Székesfehérvár, 2017. 04. 11-13. A PPP a vonatkoztatási rendszer, az elmélet és gyakorlat összefüggése egy Fehérvár környéki kísérleti GNSS-mérés tapasztalatai alapján Busics György
GPS és atomóra. Kunsági-Máté Sándor. Fizikus MSc 1. évfolyam
 GPS és atomóra Kunsági-Máté Sándor Fizikus MSc 1. évfolyam Informatikai eszközök fizikai alapjai, 2017. március 1. Eötvös Loránd Tudományegyetem, Természettudományi Kar, Budapest Történeti bevezető 1957
GPS és atomóra Kunsági-Máté Sándor Fizikus MSc 1. évfolyam Informatikai eszközök fizikai alapjai, 2017. március 1. Eötvös Loránd Tudományegyetem, Természettudományi Kar, Budapest Történeti bevezető 1957
Kincskeresés GPS-el: a korszerű navigáció alapjai
 2007. február 22. : a korszerű navigáció alapjai Kovács Béla Térképtudományi és Geoinformatikai Tanszék Eötvös Loránd Tudományegyetem, Informatika Kar Térképtudományi és Geoinformatikai Tanszék 1117 Budapest,
2007. február 22. : a korszerű navigáció alapjai Kovács Béla Térképtudományi és Geoinformatikai Tanszék Eötvös Loránd Tudományegyetem, Informatika Kar Térképtudományi és Geoinformatikai Tanszék 1117 Budapest,
2007. március 23. INFO SAVARIA 2007. GNSS alapok. Eötvös Loránd Tudományegyetem, Informatika Kar. Térképtudományi és Geoinformatikai Tanszék
 2007. március 23. INFO SAVARIA 2007 GPS/GNSS GNSS alapok Kovács Béla Térképtudományi és Geoinformatikai Tanszék Eötvös Loránd Tudományegyetem, Informatika Kar Térképtudományi és Geoinformatikai Tanszék
2007. március 23. INFO SAVARIA 2007 GPS/GNSS GNSS alapok Kovács Béla Térképtudományi és Geoinformatikai Tanszék Eötvös Loránd Tudományegyetem, Informatika Kar Térképtudományi és Geoinformatikai Tanszék
LOKÁLIS IONOSZFÉRA MODELLEZÉS ÉS ALKALMAZÁSA A GNSS HELYMEGHATÁROZÁSBAN
 LOKÁLIS IONOSZFÉRA MODELLEZÉS ÉS ALKALMAZÁSA A GNSS HELYMEGHATÁROZÁSBAN Juni Ildikó Budapesti Műszaki és Gazdaságtudományi Egyetem BSc IV. évfolyam Konzulens: Dr. Rózsa Szabolcs MFTT 29. Vándorgyűlés,
LOKÁLIS IONOSZFÉRA MODELLEZÉS ÉS ALKALMAZÁSA A GNSS HELYMEGHATÁROZÁSBAN Juni Ildikó Budapesti Műszaki és Gazdaságtudományi Egyetem BSc IV. évfolyam Konzulens: Dr. Rózsa Szabolcs MFTT 29. Vándorgyűlés,
GPS technikák. Adatgyűjt A GPS. Geometriai adatok gyűjt. Adatnyerés elsődleges képével fizikai kapcsolatba kerülünk másodlagos: : az informáci
 Adatgyűjt jtés GPS technikák 1. A műholdas m helymeghatároz s rövid r története Geometriai adatok gyűjt jtése Attribútum tum adatok gyűjt jtés Adatnyerés elsődleges dleges: : méréskor m a tárgyal t vagy
Adatgyűjt jtés GPS technikák 1. A műholdas m helymeghatároz s rövid r története Geometriai adatok gyűjt jtése Attribútum tum adatok gyűjt jtés Adatnyerés elsődleges dleges: : méréskor m a tárgyal t vagy
, ,457. GNSS technológia Budapest június 20 július 1.
 110,457 110,457 2 1 3 4 2 GNNS Elv, módszerek, Budapest 2016. június Földmérési és Távérzékelési Intézet Navigare necesse est, vivere non est necesse! Hajózni kell, élni nem kell!", Pompeius 6 3 TÁJÉKOZÓDÁS
110,457 110,457 2 1 3 4 2 GNNS Elv, módszerek, Budapest 2016. június Földmérési és Távérzékelési Intézet Navigare necesse est, vivere non est necesse! Hajózni kell, élni nem kell!", Pompeius 6 3 TÁJÉKOZÓDÁS
ADATÁTVITELI RENDSZEREK A GLOBÁLIS LOGISZTIKÁBAN
 9. ELŐADÁS ADATÁTVITELI RENDSZEREK A GLOBÁLIS LOGISZTIKÁBAN A logisztikai rendszerek irányításához szükség van az adatok továbbítására a rendszer különböző elemei között. Ezt a feladatot a különböző adatátviteli
9. ELŐADÁS ADATÁTVITELI RENDSZEREK A GLOBÁLIS LOGISZTIKÁBAN A logisztikai rendszerek irányításához szükség van az adatok továbbítására a rendszer különböző elemei között. Ezt a feladatot a különböző adatátviteli
Kozmikus geodézia MSc
 Kozmikus geodézia MSc 1-4 előadás: Tóth Gy. 5-13 előadás: Ádám J. 2 ZH: 6/7. és 12/13. héten (max. 30 pont) alapismeretek, csillagkatalógusok, koordináta- és időrendszerek, függővonal iránymeghatározása
Kozmikus geodézia MSc 1-4 előadás: Tóth Gy. 5-13 előadás: Ádám J. 2 ZH: 6/7. és 12/13. héten (max. 30 pont) alapismeretek, csillagkatalógusok, koordináta- és időrendszerek, függővonal iránymeghatározása
Interferencia jelenségek a BME permanens állomásán
 Interferencia jelenségek a BME permanens állomásán Takács Bence, egyetemi docens takacs.bence@epito.bme.hu Rédey szeminárium 2017. március 3. Nagy teljesítményű blokkolók hatótávolság : 200 km adó teljesítmény
Interferencia jelenségek a BME permanens állomásán Takács Bence, egyetemi docens takacs.bence@epito.bme.hu Rédey szeminárium 2017. március 3. Nagy teljesítményű blokkolók hatótávolság : 200 km adó teljesítmény
PPP-RTK a hálózati RTK jövője?
 1 PPP-RTK a hálózati RTK jövője? Horváth Tamás FÖMI Kozmikus Geodéziai Obszervatórium Penc Rédey Szeminárium, BME, 006. április 6., Budapest Tartalom Emlékeztető Mérés-tér, állapot-tér PPP PPP-RTK Emlékeztető
1 PPP-RTK a hálózati RTK jövője? Horváth Tamás FÖMI Kozmikus Geodéziai Obszervatórium Penc Rédey Szeminárium, BME, 006. április 6., Budapest Tartalom Emlékeztető Mérés-tér, állapot-tér PPP PPP-RTK Emlékeztető
Pálya : Az a vonal, amelyen a mozgó test végighalad. Út: A pályának az a része, amelyet adott idő alatt a mozgó tárgy megtesz.
 Haladó mozgások A hely és a mozgás viszonylagos. A testek helyét, mozgását valamilyen vonatkoztatási ponthoz, vonatkoztatási rendszerhez képest adjuk meg, ahhoz viszonyítjuk. pl. A vonatban utazó ember
Haladó mozgások A hely és a mozgás viszonylagos. A testek helyét, mozgását valamilyen vonatkoztatási ponthoz, vonatkoztatási rendszerhez képest adjuk meg, ahhoz viszonyítjuk. pl. A vonatban utazó ember
Haladó mozgások A hely és a mozgás viszonylagos. A testek helyét, mozgását valamilyen vonatkoztatási ponthoz, vonatkoztatási rendszerhez képest adjuk
 Haladó mozgások A hely és a mozgás viszonylagos. A testek helyét, mozgását valamilyen vonatkoztatási ponthoz, vonatkoztatási rendszerhez képest adjuk meg, ahhoz viszonyítjuk. pl. A vonatban utazó ember
Haladó mozgások A hely és a mozgás viszonylagos. A testek helyét, mozgását valamilyen vonatkoztatási ponthoz, vonatkoztatási rendszerhez képest adjuk meg, ahhoz viszonyítjuk. pl. A vonatban utazó ember
TÉRINFORMATIKA II. Dr. Kulcsár Balázs Ph.D. adjunktus. Debreceni Egyetem Műszaki Kar Műszaki Alaptárgyi Tanszék
 TÉRINFORMATIKA II. Dr. Kulcsár Balázs Ph.D. adjunktus Debreceni Egyetem Műszaki Kar Műszaki Alaptárgyi Tanszék ELSŐDLEGES ADATNYERÉSI ELJÁRÁSOK 1. Geodézia Fotogrammetria Mesterséges holdak GEOMETRIAI
TÉRINFORMATIKA II. Dr. Kulcsár Balázs Ph.D. adjunktus Debreceni Egyetem Műszaki Kar Műszaki Alaptárgyi Tanszék ELSŐDLEGES ADATNYERÉSI ELJÁRÁSOK 1. Geodézia Fotogrammetria Mesterséges holdak GEOMETRIAI
Leica Viva GNSS SmartLink technológia. Csábi Zoltán mérnök üzletkötő, Kelet-Magyarország
 Leica Viva GNSS SmartLink technológia Csábi Zoltán mérnök üzletkötő, Kelet-Magyarország Kitoljuk a határokat Leica Viva GNSS technológia Az igazi határ ott van ahol a műszer még éppen működik, illetve
Leica Viva GNSS SmartLink technológia Csábi Zoltán mérnök üzletkötő, Kelet-Magyarország Kitoljuk a határokat Leica Viva GNSS technológia Az igazi határ ott van ahol a műszer még éppen működik, illetve
A GPS pozíciók pontosításának lehetőségei
 A GPS pozíciók pontosításának lehetőségei GIS OPEN 2005 Bartha Csaba csaba.bartha@geopro.hu Milyen fogalmakkal találkozunk? VRS GPS FKP EGNOS DGPS RTCM OGPSH GLONASS WAAS RTK STATIKUS GSM KINEMATIKUS URH
A GPS pozíciók pontosításának lehetőségei GIS OPEN 2005 Bartha Csaba csaba.bartha@geopro.hu Milyen fogalmakkal találkozunk? VRS GPS FKP EGNOS DGPS RTCM OGPSH GLONASS WAAS RTK STATIKUS GSM KINEMATIKUS URH
A rendszer legfontosabb jellemzőit az alábbiakban foglalhatjuk össze:
 GPS nyomkövető készülék, illetve navigációs rendszerek A GPS a Global Positioning System angol rövidítése és globális helymeghatározó rendszert jelent. Egy rendszer, amely 24 műholdból áll, melyet az USA
GPS nyomkövető készülék, illetve navigációs rendszerek A GPS a Global Positioning System angol rövidítése és globális helymeghatározó rendszert jelent. Egy rendszer, amely 24 műholdból áll, melyet az USA
Pálya : Az a vonal, amelyen a mozgó test végighalad. Út: A pályának az a része, amelyet adott idő alatt a mozgó tárgy megtesz.
 Haladó mozgások A hely és a mozgás viszonylagos. A testek helyét, mozgását valamilyen vonatkoztatási ponthoz, vonatkoztatási rendszerhez képest adjuk meg, ahhoz viszonyítjuk. pl. A vonatban utazó ember
Haladó mozgások A hely és a mozgás viszonylagos. A testek helyét, mozgását valamilyen vonatkoztatási ponthoz, vonatkoztatási rendszerhez képest adjuk meg, ahhoz viszonyítjuk. pl. A vonatban utazó ember
KUTATÁSI JELENTÉS. Multilaterációs radarrendszer kutatása. Szüllő Ádám
 KUTATÁSI JELENTÉS Multilaterációs radarrendszer kutatása Szüllő Ádám 212 Bevezetés A Mikrohullámú Távérzékelés Laboratórium jelenlegi K+F tevékenységei közül ezen jelentés a multilaterációs radarrendszerek
KUTATÁSI JELENTÉS Multilaterációs radarrendszer kutatása Szüllő Ádám 212 Bevezetés A Mikrohullámú Távérzékelés Laboratórium jelenlegi K+F tevékenységei közül ezen jelentés a multilaterációs radarrendszerek
A GNSS infrastruktúrára támaszkodó műholdas helymeghatározás. Borza Tibor (FÖMI KGO) Busics György (NyME GEO)
 Busics György (NyME GEO)") A GNSS infrastruktúrára támaszkodó műholdas helymeghatározás Borza Tibor (FÖMI KGO) Busics György (NyME GEO) Tartalom Mi a GNSS, a GNSS infrastruktúra? Melyek az infrastruktúra szintjei? Mi a hazai helyzet?
A GNSS infrastruktúrára támaszkodó műholdas helymeghatározás Borza Tibor (FÖMI KGO) Busics György (NyME GEO) Tartalom Mi a GNSS, a GNSS infrastruktúra? Melyek az infrastruktúra szintjei? Mi a hazai helyzet?
Matematika 11 Koordináta geometria. matematika és fizika szakos középiskolai tanár. > o < szeptember 27.
 Matematika 11 Koordináta geometria Juhász László matematika és fizika szakos középiskolai tanár > o < 2015. szeptember 27. copyright: c Juhász László Ennek a könyvnek a használatát szerzői jog védi. A
Matematika 11 Koordináta geometria Juhász László matematika és fizika szakos középiskolai tanár > o < 2015. szeptember 27. copyright: c Juhász László Ennek a könyvnek a használatát szerzői jog védi. A
Miskolci Egyetem Doktori Tanácsa Miskolc. Program: Geotechniaki rendszerek és eljárástechnika Programvezető: Dr. Kovács Ferenc
 Miskolci Egyetem Doktori Tanácsa Miskolc Program: Geotechniaki rendszerek és eljárástechnika Programvezető: Dr. Kovács Ferenc Alprogram: Geotechnikai rendszerek és eljárások kutatása, fejlesztése Részprogram:
Miskolci Egyetem Doktori Tanácsa Miskolc Program: Geotechniaki rendszerek és eljárástechnika Programvezető: Dr. Kovács Ferenc Alprogram: Geotechnikai rendszerek és eljárások kutatása, fejlesztése Részprogram:
GNSS Modernizáció. Horváth Tamás FÖMI Kozmikus Geodéziai Obszervatórium Penc. Tea előadás, 2006. június 1., Penc
 1 GNSS Modernizáció Horváth Tamás FÖMI Kozmikus Geodéziai Obszervatórium Penc Tea előadás, 2006. június 1., Penc Tartalom GPS GLONASS Galileo 2 GPS Block IIR Block IIA Block IIF 3 A GPS pontossága GPS
1 GNSS Modernizáció Horváth Tamás FÖMI Kozmikus Geodéziai Obszervatórium Penc Tea előadás, 2006. június 1., Penc Tartalom GPS GLONASS Galileo 2 GPS Block IIR Block IIA Block IIF 3 A GPS pontossága GPS
Hol tart a GNSS állapot-tér modellezés bevezetése?
 Hol tart a GNSS állapot-tér modellezés bevezetése? Horváth Tamás FÖMI Kozmikus Geodéziai Obszervatórium horvath@gnssnet.hu www.gnssnet.hu Tel: +36-27-374-980, Mobil: +36-30-867-2570 Rédey István Geodéziai
Hol tart a GNSS állapot-tér modellezés bevezetése? Horváth Tamás FÖMI Kozmikus Geodéziai Obszervatórium horvath@gnssnet.hu www.gnssnet.hu Tel: +36-27-374-980, Mobil: +36-30-867-2570 Rédey István Geodéziai
Takács Bence GPS: pontosság és megbízhatóság. Földmérők Világnapja és Európai Földmérők és Geoinformatikusok Napja Budapest, március 21.
 Takács Bence GPS: pontosság és megbízhatóság Földmérők Világnapja és Európai Földmérők és Geoinformatikusok Napja Budapest, 2018. március 21. AIRBUS A320 LOW VISIBILITY ILS CAT III AUTOLAND APPROACH IN
Takács Bence GPS: pontosság és megbízhatóság Földmérők Világnapja és Európai Földmérők és Geoinformatikusok Napja Budapest, 2018. március 21. AIRBUS A320 LOW VISIBILITY ILS CAT III AUTOLAND APPROACH IN
Pálya : Az a vonal, amelyen a mozgó tárgy, test végighalad. Út: A pályának az a része, amelyet adott idő alatt a mozgó tárgy megtesz.
 Haladó mozgások A hely és a mozgás viszonylagos. A testek helyét, mozgását valamilyen vonatkoztatási ponthoz, vonatkoztatási rendszerhez képest adjuk meg, ahhoz viszonyítjuk. pl. A vonatban utazó ember
Haladó mozgások A hely és a mozgás viszonylagos. A testek helyét, mozgását valamilyen vonatkoztatási ponthoz, vonatkoztatási rendszerhez képest adjuk meg, ahhoz viszonyítjuk. pl. A vonatban utazó ember
A GPS-rendszer. Adatgyűjtés A GPS. Helymeghatározási eljárások. 1. Földi geodéziai módszerek Mérőállomás
 Adatgyűjtés A GPS-rendszer Összeállította: Szűcs László Geometriai adatok gyűjtése Attribútum adatok gyűjtés Adatnyerés elsődleges: méréskor a tárgyal vagy képével fizikai kapcsolatba kerülünk másodlagos:
Adatgyűjtés A GPS-rendszer Összeállította: Szűcs László Geometriai adatok gyűjtése Attribútum adatok gyűjtés Adatnyerés elsődleges: méréskor a tárgyal vagy képével fizikai kapcsolatba kerülünk másodlagos:
Fine-Grained Network Time Synchronization using Reference Broadcast
 Fine-Grained Network Time Synchronization using Reference Broadcast Ofszet Az indítás óta eltelt idıt mérik Az ofszet változása: skew Az órák sebességének különbsége Oka: Az óra az oszcillátor pontatlanságát
Fine-Grained Network Time Synchronization using Reference Broadcast Ofszet Az indítás óta eltelt idıt mérik Az ofszet változása: skew Az órák sebességének különbsége Oka: Az óra az oszcillátor pontatlanságát
MIKOVINY SÁMUEL TÉRINFORMATIKAI EMLÉKVERSENY
 FVM VIDÉKFEJLESZTÉSI, KÉPZÉSI ÉS SZAKTANÁCSADÁSI INTÉZET NYUGAT MAGYARORSZÁGI EGYETEM GEOINFORMATIKAI KAR MIKOVINY SÁMUEL TÉRINFORMATIKAI EMLÉKVERSENY 2008/2009. TANÉV Az I. FORDULÓ FELADATAI NÉV:... Tudnivalók
FVM VIDÉKFEJLESZTÉSI, KÉPZÉSI ÉS SZAKTANÁCSADÁSI INTÉZET NYUGAT MAGYARORSZÁGI EGYETEM GEOINFORMATIKAI KAR MIKOVINY SÁMUEL TÉRINFORMATIKAI EMLÉKVERSENY 2008/2009. TANÉV Az I. FORDULÓ FELADATAI NÉV:... Tudnivalók
Térképismeret ELTE TTK BSc. 2007 11. Terepi adatgyűjt. ció. (Kartográfiai informáci GPS-adatgy. tematikus térkt gia) http://lazarus.elte.
 http://lazarus.elte.") Térképismeret ELTE TTK Földtudományi és s Földrajz F BSc. 2007 11. Török k Zsolt, Draskovits Zsuzsa ELTE IK TérkT rképtudományi és Geoinformatikai Tanszék http://lazarus.elte.hu Terepi adatgyűjt jtés s
Térképismeret ELTE TTK Földtudományi és s Földrajz F BSc. 2007 11. Török k Zsolt, Draskovits Zsuzsa ELTE IK TérkT rképtudományi és Geoinformatikai Tanszék http://lazarus.elte.hu Terepi adatgyűjt jtés s
Rádiófrekvenciás kommunikációs rendszerek
 Rádiófrekvenciás kommunikációs rendszerek Adó Adó Vevő Jellemzően broadcast adás (széles földrajzi terület besugárzása, TV, Rádió műsor adás) Adó Vevő Vevő Adó Különböző kommunikációs formák. Kis- és nagykapacitású
Rádiófrekvenciás kommunikációs rendszerek Adó Adó Vevő Jellemzően broadcast adás (széles földrajzi terület besugárzása, TV, Rádió műsor adás) Adó Vevő Vevő Adó Különböző kommunikációs formák. Kis- és nagykapacitású
Agrár-környezetvédelmi Modul Agrár-környezetvédelem, agrotechnológia. KÖRNYEZETGAZDÁLKODÁSI MÉRNÖKI MSc TERMÉSZETVÉDELMI MÉRNÖKI MSc
 Agrár-környezetvédelmi Modul Agrár-környezetvédelem, agrotechnológia KÖRNYEZETGAZDÁLKODÁSI MÉRNÖKI MSc TERMÉSZETVÉDELMI MÉRNÖKI MSc Precíziós mezőgazdaság információ technológiai alapjai I. 137.lecke Globális
Agrár-környezetvédelmi Modul Agrár-környezetvédelem, agrotechnológia KÖRNYEZETGAZDÁLKODÁSI MÉRNÖKI MSc TERMÉSZETVÉDELMI MÉRNÖKI MSc Precíziós mezőgazdaság információ technológiai alapjai I. 137.lecke Globális
A műholdas helymeghatározás alapjai
 Népszerűen a műholdas helymeghatározásról és navigációról 1. rész Az idő mérése, karóránk leolvasása, ma mindannyiunk számára természetes tevékenység. De vajon ugyanilyen természetes és szükséges lesz-e
Népszerűen a műholdas helymeghatározásról és navigációról 1. rész Az idő mérése, karóránk leolvasása, ma mindannyiunk számára természetes tevékenység. De vajon ugyanilyen természetes és szükséges lesz-e
Sebesség A mozgás gyorsaságát sebességgel jellemezzük. Annak a testnek nagyobb a sebessége, amelyik ugyanannyi idő alatt több utat tesz meg, vagy
 Haladó mozgások Alapfogalmak: Pálya: Az a vonal, amelyen a tárgy, test a mozgás során végighalad. Megtett út : A pályának az a szakasza, amelyet a mozgó tárgy, test megtesz. Elmozdulás: A kezdőpont és
Haladó mozgások Alapfogalmak: Pálya: Az a vonal, amelyen a tárgy, test a mozgás során végighalad. Megtett út : A pályának az a szakasza, amelyet a mozgó tárgy, test megtesz. Elmozdulás: A kezdőpont és
Koordinátarendszerek, dátumok, GPS
 Koordinátarendszerek, dátumok, GPS KOORDINÁTARENDSZEREK A SPATIAL-BEN Koordinátarendszer típusok 1. Descartes-féle koordinátarendszer: egy adott pontból (origó) kiinduló, egymásra merőleges egyenesek alkotják,
Koordinátarendszerek, dátumok, GPS KOORDINÁTARENDSZEREK A SPATIAL-BEN Koordinátarendszer típusok 1. Descartes-féle koordinátarendszer: egy adott pontból (origó) kiinduló, egymásra merőleges egyenesek alkotják,
I. Telematikai rendszerek
 I. Telematikai rendszerek Telekommunikáció+Informatika=TeleMatika TRACKING & TRACING - áru és jármű nyomon követés, útvonaltervezés TRANSZPONDERES azonosítás veszélyes, romlandó áruk kezelése NAVIGÁCIÓ
I. Telematikai rendszerek Telekommunikáció+Informatika=TeleMatika TRACKING & TRACING - áru és jármű nyomon követés, útvonaltervezés TRANSZPONDERES azonosítás veszélyes, romlandó áruk kezelése NAVIGÁCIÓ
megoldásai a Trimble 5503 DR
 Autópálya építés s kitűzésének speciális megoldásai a Trimble 5503 DR mérőállomás s segíts tségével Zeke Balázs Győző 2006 Magyarország úthálózata Autópálya 522 km Autóú óút t 130 km Csomóponti ágak 205
Autópálya építés s kitűzésének speciális megoldásai a Trimble 5503 DR mérőállomás s segíts tségével Zeke Balázs Győző 2006 Magyarország úthálózata Autópálya 522 km Autóú óút t 130 km Csomóponti ágak 205
Mozgásvizsgálatok. Mérnökgeodézia II. Ágfalvi Mihály - Tóth Zoltán
 Mérnökgeodézia II. Ágfalvi Mihály - Tóth Zoltán Célja: Várható elmozdulások előrejelzése (erőhatások alatt, Siógemenci árvízkapu) Már bekövetkezett mozgások okainak vizsgálata (Pl. kulcsi löszpart) Laboratóriumi
Mérnökgeodézia II. Ágfalvi Mihály - Tóth Zoltán Célja: Várható elmozdulások előrejelzése (erőhatások alatt, Siógemenci árvízkapu) Már bekövetkezett mozgások okainak vizsgálata (Pl. kulcsi löszpart) Laboratóriumi
Adatgyűjtés. Kézi technológiák. Adatgyűjtési technológiák. Térbeli adatok jelenségek térbeli elhelyezkedése, kiterjedése, stb.
 Adatgyűjtés Adatgyűjtés Adatgyűjtési és adatnyerési technikák a térinformatikában Térbeli adatok jelenségek térbeli elhelyezkedése, kiterjedése, stb. Leíró (attributum) adatok a térképi objektumokhoz rendelt
Adatgyűjtés Adatgyűjtés Adatgyűjtési és adatnyerési technikák a térinformatikában Térbeli adatok jelenségek térbeli elhelyezkedése, kiterjedése, stb. Leíró (attributum) adatok a térképi objektumokhoz rendelt
FÖLDRAJZI HELYMEGHATÁROZ ÉGBOLTON
 TÁJÉKOZÓDÁS S A FÖLDÖN TÉRBEN ÉS ID BEN Készítette: Mucsi Zoltán FÖLDRAJZI HELYMEGHATÁROZ ROZÁS S AZ ÉGBOLTON A NAP, A CSILLAGOK ÉS S A HOLD LÁTSZL TSZÓLAGOS MOZGÁSAI AZ ÓKOR ÓTA LÁTÓHATÁR(HORIZONT): AZ
TÁJÉKOZÓDÁS S A FÖLDÖN TÉRBEN ÉS ID BEN Készítette: Mucsi Zoltán FÖLDRAJZI HELYMEGHATÁROZ ROZÁS S AZ ÉGBOLTON A NAP, A CSILLAGOK ÉS S A HOLD LÁTSZL TSZÓLAGOS MOZGÁSAI AZ ÓKOR ÓTA LÁTÓHATÁR(HORIZONT): AZ
Sokkia gyártmányú RTK GPS rendszer
 Sokkia gyártmányú RTK GPS rendszer A leírást készítette: Deákvári József, intézeti mérnök Az FVM Mezőgazdasági Gépesítési Intézet 2005-ben újabb műszerekkel gyarapodott. Beszerzésre került egy Sokkia gyártmányú
Sokkia gyártmányú RTK GPS rendszer A leírást készítette: Deákvári József, intézeti mérnök Az FVM Mezőgazdasági Gépesítési Intézet 2005-ben újabb műszerekkel gyarapodott. Beszerzésre került egy Sokkia gyártmányú
GPS mérési jegyz könyv
 GPS mérési jegyz könyv Mérést végezte: Csutak Balázs, Laczkó Hunor Mérés helye: ITK 320. terem és az egyetem környéke Mérés ideje: 2016.03.16 A mérés célja: Ismerkedés a globális helymeghatározó rendszerrel,
GPS mérési jegyz könyv Mérést végezte: Csutak Balázs, Laczkó Hunor Mérés helye: ITK 320. terem és az egyetem környéke Mérés ideje: 2016.03.16 A mérés célja: Ismerkedés a globális helymeghatározó rendszerrel,
INFORMATIKA ÁGAZATI ALKALMAZÁSAI. Az Agrármérnöki MSc szak tananyagfejlesztése TÁMOP /1/A
 INFORMATIKA ÁGAZATI ALKALMAZÁSAI Az Agrármérnöki MSc szak tananyagfejlesztése TÁMOP-4.1.2-08/1/A-2009-0010 11. Globális helymeghatározás pontosító rendszerei Pontosságot befolyásoló tényezők Differenciális
INFORMATIKA ÁGAZATI ALKALMAZÁSAI Az Agrármérnöki MSc szak tananyagfejlesztése TÁMOP-4.1.2-08/1/A-2009-0010 11. Globális helymeghatározás pontosító rendszerei Pontosságot befolyásoló tényezők Differenciális
GPS rendszerek és felhasználásuk
 GPS rendszerek és felhasználásuk A jelenlegi szabatos mőholdas helymeghatározó rendszerek közvetlen elızménye az USA Haditengerészete számára 1961-ben kifejlesztett TRANSIT mőholdas navigációs rendszer,
GPS rendszerek és felhasználásuk A jelenlegi szabatos mőholdas helymeghatározó rendszerek közvetlen elızménye az USA Haditengerészete számára 1961-ben kifejlesztett TRANSIT mőholdas navigációs rendszer,
GPS. Lehoczki Róbert Vadvilág Megőrzési Intézet Szent István Egyetem, Gödöllő
 GPS Lehoczki Róbert Vadvilág Megőrzési Intézet Szent István Egyetem, Gödöllő Három technológiát egyesít: GPS (helymeghatározás) Robosztus terepen is használható hardver Egyszerű és hatékony szoftver Mire
GPS Lehoczki Róbert Vadvilág Megőrzési Intézet Szent István Egyetem, Gödöllő Három technológiát egyesít: GPS (helymeghatározás) Robosztus terepen is használható hardver Egyszerű és hatékony szoftver Mire
FÖLDMÉRÉS ISMERETEK EMELT SZINTŰ ÍRÁSBELI VIZSGA JAVÍTÁSI-ÉRTÉKELÉSI ÚTMUTATÓ A MINTAFELADATOKHOZ
 FÖLDMÉRÉS ISMERETEK EMELT SZINTŰ ÍRÁSBELI VIZSGA JAVÍTÁSI-ÉRTÉKELÉSI ÚTMUTATÓ A MINTAFELADATOKHOZ 1 / 6 feladatlap Elméleti szöveges feladatok 1. Egészítse ki az alábbi szöveget a Glonassz GNSS alaprendszerrel
FÖLDMÉRÉS ISMERETEK EMELT SZINTŰ ÍRÁSBELI VIZSGA JAVÍTÁSI-ÉRTÉKELÉSI ÚTMUTATÓ A MINTAFELADATOKHOZ 1 / 6 feladatlap Elméleti szöveges feladatok 1. Egészítse ki az alábbi szöveget a Glonassz GNSS alaprendszerrel
Helymeghatározó technikák
 Mobil Informatika Dr. Kutor László Helymeghatározó technikák http://uni-obuda.hu/users/kutor/ MoI 5/24/1 Műholdas távközlési rendszerek GEO (Geostationary Earth Orbit Satellite) Geostacionáris pályán keringő
Mobil Informatika Dr. Kutor László Helymeghatározó technikák http://uni-obuda.hu/users/kutor/ MoI 5/24/1 Műholdas távközlési rendszerek GEO (Geostationary Earth Orbit Satellite) Geostacionáris pályán keringő
Csatlakozási állapot megjelenítése
 Csatlakozási állapot megjelenítése Ellenőrizheti a vevő és a jármű között a csatlakozás állapotát. Ezek a kapcsolatok felelősek az olyan információkért, mint a GPS információ és a parkolási jelzések. 1
Csatlakozási állapot megjelenítése Ellenőrizheti a vevő és a jármű között a csatlakozás állapotát. Ezek a kapcsolatok felelősek az olyan információkért, mint a GPS információ és a parkolási jelzések. 1
Robotika. Relatív helymeghatározás Odometria
 Robotika Relatív helymeghatározás Odometria Differenciális hajtás c m =πd n /nc e c m D n C e n = hány mm-t tesz meg a robot egy jeladó impulzusra = névleges kerék átmérő = jeladó fölbontása (impulzus/ford.)
Robotika Relatív helymeghatározás Odometria Differenciális hajtás c m =πd n /nc e c m D n C e n = hány mm-t tesz meg a robot egy jeladó impulzusra = névleges kerék átmérő = jeladó fölbontása (impulzus/ford.)
A jogszabályi változások és a hazai infrastruktúrában történt fejlesztések hatása a GNSS mérésekre
 A jogszabályi változások és a hazai infrastruktúrában történt fejlesztések hatása a GNSS mérésekre Braunmüller Péter Galambos István MFTTT 29. Vándorgyűlés, Sopron 2013. Július 11. Földmérési és Távérzékelési
A jogszabályi változások és a hazai infrastruktúrában történt fejlesztések hatása a GNSS mérésekre Braunmüller Péter Galambos István MFTTT 29. Vándorgyűlés, Sopron 2013. Július 11. Földmérési és Távérzékelési
GNSS a precíziós mezőgazdaságban
 GNSS a precíziós mezőgazdaságban 2015.10.27. 1/14 GNSS a precíziós mezőgazdaságban Horváth Tamás Alberding GmbH GPS25 Konferencia Műholdas helymeghatározás Magyarországon 1990-2015 2015. október 27., Budapest
GNSS a precíziós mezőgazdaságban 2015.10.27. 1/14 GNSS a precíziós mezőgazdaságban Horváth Tamás Alberding GmbH GPS25 Konferencia Műholdas helymeghatározás Magyarországon 1990-2015 2015. október 27., Budapest
A Föld alakja TRANSZFORMÁCIÓ. Magyarországon még használatban lévő vetületi rendszerek. Miért kell transzformálni? Főbb transzformációs lehetőségek
 TRANSZFORMÁCIÓ A Föld alakja -A föld alakja: geoid (az a felület, amelyen a nehézségi gyorsulás értéke állandó) szabálytalan alak, kezelése nehéz -A geoidot ellipszoiddal közelítjük -A földfelszíni pontokat
TRANSZFORMÁCIÓ A Föld alakja -A föld alakja: geoid (az a felület, amelyen a nehézségi gyorsulás értéke állandó) szabálytalan alak, kezelése nehéz -A geoidot ellipszoiddal közelítjük -A földfelszíni pontokat
A GPS mérésekről. A statikus és kinematikus mérések fontosabb jellemzői. Valós idejű differenciális (DGPS) és kinematikus (RTK) mérési módszerek.
 és kinematikus (RTK) mérési módszerek.") 6. előadás: A GPS mérésekről. A statikus és kinematikus mérések fontosabb jellemzői. Valós idejű differenciális (DGPS) és kinematikus (RTK) mérési módszerek. A GPS mérések egyik nagy előnye, hogy a mérések
6. előadás: A GPS mérésekről. A statikus és kinematikus mérések fontosabb jellemzői. Valós idejű differenciális (DGPS) és kinematikus (RTK) mérési módszerek. A GPS mérések egyik nagy előnye, hogy a mérések
Alacsonypályás műholdvétel megvalósítása szoftverrádiós eszközökkel. Dudás Levente
 Alacsonypályás műholdvétel megvalósítása szoftverrádiós eszközökkel Dudás Levente 2013 1 Tartalomjegyzék Alacsonypályás műholdvétel magvalósítása szoftverrádiós eszközökkel... 1 1. A teszteléshez használt
Alacsonypályás műholdvétel megvalósítása szoftverrádiós eszközökkel Dudás Levente 2013 1 Tartalomjegyzék Alacsonypályás műholdvétel magvalósítása szoftverrádiós eszközökkel... 1 1. A teszteléshez használt
 A felhasználói szegmens GPS technikák 4. A felhasználói szegmens mindenki, aki hely, sebesség és időadatokat akar meghatározni mindenki, aki a légkörön átmenő elektromágneses hullámokat akar vizsgálni
A felhasználói szegmens GPS technikák 4. A felhasználói szegmens mindenki, aki hely, sebesség és időadatokat akar meghatározni mindenki, aki a légkörön átmenő elektromágneses hullámokat akar vizsgálni
Bluetooth és a GPS technológia bemutatása. Készítette: Szentesi Szabolcs Neptun kód: DUOQTK
 Bluetooth és a GPS technológia bemutatása Készítette: Szentesi Szabolcs Neptun kód: DUOQTK Mi is valójában a Bluetooth? Történelmi áttekintés X. század : Dán Viking kékfog Harald király egyesítette Dániát
Bluetooth és a GPS technológia bemutatása Készítette: Szentesi Szabolcs Neptun kód: DUOQTK Mi is valójában a Bluetooth? Történelmi áttekintés X. század : Dán Viking kékfog Harald király egyesítette Dániát
GPS-mérések abszolút feldolgozását terhelô hibahatások vizsgálata
 GPS-mérések abszolút feldolgozását terhelô hibahatások vizsgálata TAKÁCS BENCE egyetemi tanársegéd BME Általános- és Felsôgeodézia Tanszék, bence@agt.bme.hu Reviewed Kulcsszavak: abszolút helymeghatározás,
GPS-mérések abszolút feldolgozását terhelô hibahatások vizsgálata TAKÁCS BENCE egyetemi tanársegéd BME Általános- és Felsôgeodézia Tanszék, bence@agt.bme.hu Reviewed Kulcsszavak: abszolút helymeghatározás,
GPS szótár. A legfontosabb 25 kifejezés a GPS világából. Készítette: Gere Tamás A GPSArena.hu alapítója
 A legfontosabb 25 kifejezés a GPS világából Készítette: Gere Tamás A GPSArena.hu alapítója 2D/3D vétel Megadja, hogy a GPS vétel síkbeli (2D) vagy térbeli (3D). Utóbbi esetben magassági adat is rendelkezésre
A legfontosabb 25 kifejezés a GPS világából Készítette: Gere Tamás A GPSArena.hu alapítója 2D/3D vétel Megadja, hogy a GPS vétel síkbeli (2D) vagy térbeli (3D). Utóbbi esetben magassági adat is rendelkezésre
METEOROLÓGIAI MÉRÉSEK és MEGFIGYELÉSEK
 METEOROLÓGIAI MÉRÉSEK és MEGFIGYELÉSEK Földtudomány BSc Mészáros Róbert Eötvös Loránd Tudományegyetem Meteorológiai Tanszék MIÉRT MÉRÜNK? A meteorológiai mérések célja: 1. A légkör pillanatnyi állapotának
METEOROLÓGIAI MÉRÉSEK és MEGFIGYELÉSEK Földtudomány BSc Mészáros Róbert Eötvös Loránd Tudományegyetem Meteorológiai Tanszék MIÉRT MÉRÜNK? A meteorológiai mérések célja: 1. A légkör pillanatnyi állapotának
Térinformatikai DGPS NTRIP vétel és feldolgozás
 Térinformatikai DGPS NTRIP vétel és feldolgozás Méréseinkhez a Thales Mobile Mapper CE térinformatikai GPS vevıt használtunk. A mérést a Szegedi Tudományegyetem Egyetem utcai épületének tetején található
Térinformatikai DGPS NTRIP vétel és feldolgozás Méréseinkhez a Thales Mobile Mapper CE térinformatikai GPS vevıt használtunk. A mérést a Szegedi Tudományegyetem Egyetem utcai épületének tetején található
Óbudai Egyetem Alba Regia Műszaki Kar Szakdolgozat védés 2015. január 2. GNSS technika alkalmazása tervezési alaptérképek készítésekor
 Óbudai Egyetem Alba Regia Műszaki Kar Szakdolgozat védés 2015. január 2. GNSS technika alkalmazása tervezési alaptérképek készítésekor Péter Tamás Földmérő földrendező mérnök BSc. Szak, V. évfolyam Dr.
Óbudai Egyetem Alba Regia Műszaki Kar Szakdolgozat védés 2015. január 2. GNSS technika alkalmazása tervezési alaptérképek készítésekor Péter Tamás Földmérő földrendező mérnök BSc. Szak, V. évfolyam Dr.
Rallyinfo.hu - GPS rendszer működésének technikai leírása V1
 Rallyinfo.hu - GPS rendszer működésének technikai leírása V1 1. ábra: GPS doboz Méretei: 115x90x55mm Súlya: 340g + 2db csőbilincs 110g GPS mérés általános működési elve: A GPS egy fejlett helymeghatározó
Rallyinfo.hu - GPS rendszer működésének technikai leírása V1 1. ábra: GPS doboz Méretei: 115x90x55mm Súlya: 340g + 2db csőbilincs 110g GPS mérés általános működési elve: A GPS egy fejlett helymeghatározó
A FIR-ek alkotóelemei: < hardver (bemeneti, kimeneti eszközök és a számítógép), < szoftver (ARC/INFO, ArcView, MapInfo), < adatok, < felhasználók.
, < szoftver (ARC/INFO, ArcView, MapInfo), < adatok, < felhasználók.") Leíró adatok vagy attribútumok: az egyes objektumok sajátságait, tulajdonságait írják le számítógépek számára feldolgozható módon. A FIR- ek által megválaszolható kérdések: < 1. Mi van egy adott helyen?
Leíró adatok vagy attribútumok: az egyes objektumok sajátságait, tulajdonságait írják le számítógépek számára feldolgozható módon. A FIR- ek által megválaszolható kérdések: < 1. Mi van egy adott helyen?
Elveszett m²-ek? (Az akaratlanul elveszett információ)
") Elveszett m²-ek? (Az akaratlanul elveszett információ) A mérés és a térkép I. A földrészletek elméleti határvonalait definiáló geodéziai/geometriai pontok (mint térképi objektumok) 0[null] dimenziósak,
Elveszett m²-ek? (Az akaratlanul elveszett információ) A mérés és a térkép I. A földrészletek elméleti határvonalait definiáló geodéziai/geometriai pontok (mint térképi objektumok) 0[null] dimenziósak,
Mőholdas helymeghatározás
 Mőholdas helymeghatározás Szatmári József Szegedi Tudományegyetem Természeti Földrajzi és Geoinformatikai Tanszék Tájékozódás a Földön Global Positioning System: a nagy ötlet Néhány alaptétel GPS vevık
Mőholdas helymeghatározás Szatmári József Szegedi Tudományegyetem Természeti Földrajzi és Geoinformatikai Tanszék Tájékozódás a Földön Global Positioning System: a nagy ötlet Néhány alaptétel GPS vevık
GNSSnet.hu. Akár cm-es pontosságú műholdas helymeghatározás bárhol az országban. Földmérési és Távérzékelési Intézet GNSS Szolgáltató Központ
 Akár cm-es pontosságú műholdas helymeghatározás bárhol az országban Földmérési és Távérzékelési Intézet GNSS Szolgáltató Központ Precíziós mezőgazdálkodás Automatikus munkagépvezérlés cm-es pontossággal
Akár cm-es pontosságú műholdas helymeghatározás bárhol az országban Földmérési és Távérzékelési Intézet GNSS Szolgáltató Központ Precíziós mezőgazdálkodás Automatikus munkagépvezérlés cm-es pontossággal
INFORMATIKA ÁGAZATI ALKALMAZÁSAI. Az Agrármérnöki MSc szak tananyagfejlesztése TÁMOP-4.1.2-08/1/A-2009-0010
 INFORMATIKA ÁGAZATI ALKALMAZÁSAI Az Agrármérnöki MSc szak tananyagfejlesztése TÁMOP-4.1.2-08/1/A-2009-0010 13. GNSS mérés tervezése, végrehajtása Tervezés célja, eszközei, almanach GNSS tervező szoftverek
INFORMATIKA ÁGAZATI ALKALMAZÁSAI Az Agrármérnöki MSc szak tananyagfejlesztése TÁMOP-4.1.2-08/1/A-2009-0010 13. GNSS mérés tervezése, végrehajtása Tervezés célja, eszközei, almanach GNSS tervező szoftverek
MUNKAANYAG. Heilmann János. Globális helymeghatározó rendszerrel történő vízszintes alappontsűrítés. A követelménymodul megnevezése:
 Heilmann János Globális helymeghatározó rendszerrel történő vízszintes alappontsűrítés A követelménymodul megnevezése: Alappontsűrítés és terepi adatgyűjtés feladatai A követelménymodul száma: 2246-06
Heilmann János Globális helymeghatározó rendszerrel történő vízszintes alappontsűrítés A követelménymodul megnevezése: Alappontsűrítés és terepi adatgyűjtés feladatai A követelménymodul száma: 2246-06
Hogyan lehet meghatározni az égitestek távolságát?
 Hogyan lehet meghatározni az égitestek távolságát? Először egy régóta használt, praktikus módszerről lesz szó, amelyet a térképészetben is alkalmaznak. Ez a geometriai háromszögelésen alapul, trigonometriai
Hogyan lehet meghatározni az égitestek távolságát? Először egy régóta használt, praktikus módszerről lesz szó, amelyet a térképészetben is alkalmaznak. Ez a geometriai háromszögelésen alapul, trigonometriai
A GNSS Szolgáltató Központ 2009-ben www.gnssnet.hu. Galambos István FÖMI Kozmikus Geodéziai Obszervatórium
 A GNSS Szolgáltató Központ 2009-ben www.gnssnet.hu Galambos István FÖMI Kozmikus Geodéziai Obszervatórium Tartalom: A FÖMI GNSSnet.hu hálózata 2008 év végén Modernizáció a hálózatban 2009-ben A szolgáltatások
A GNSS Szolgáltató Központ 2009-ben www.gnssnet.hu Galambos István FÖMI Kozmikus Geodéziai Obszervatórium Tartalom: A FÖMI GNSSnet.hu hálózata 2008 év végén Modernizáció a hálózatban 2009-ben A szolgáltatások
Fontos szélességi körök. Északi sarkkör (Ész. 66 30') Ráktérítő (Ész. 23 30') Egyenlítő (0 ) Baktérítő (Dsz. 23 30') Déli sarkkör (Dsz.
 Ráktérítő (Ész. 23 30') Egyenlítő (0 ) Baktérítő (Dsz. 23 30') Déli sarkkör (Dsz.") Tájékozódás Földrajzi szélesség Földrajzi szélesség (φ): A P pont szélességét úgy kapjuk, hogy összekötjük a Föld középpontjával, és az így kapott egyenes és az Egyenlítő síkja által bezárt szög adja
Tájékozódás Földrajzi szélesség Földrajzi szélesség (φ): A P pont szélességét úgy kapjuk, hogy összekötjük a Föld középpontjával, és az így kapott egyenes és az Egyenlítő síkja által bezárt szög adja
Digitális mérőműszerek
 KTE Szakmai nap, Tihany Digitális mérőműszerek Digitális jelek mérése Kaltenecker Zsolt KT-Electronic MIRŐL LESZ SZÓ? Mit mérjünk? Hogyan jelentkezik a minőségromlás digitális TV jel esetében? Milyen paraméterekkel
KTE Szakmai nap, Tihany Digitális mérőműszerek Digitális jelek mérése Kaltenecker Zsolt KT-Electronic MIRŐL LESZ SZÓ? Mit mérjünk? Hogyan jelentkezik a minőségromlás digitális TV jel esetében? Milyen paraméterekkel
A GNSS SZOLGÁLTAT LTATÓ. Mnyerczán András FÖMI Kozmikus Geodéziai Obszervatórium. GIS Open, 2007 március 12, Székesfehérvár
 A GNSS SZOLGÁLTAT LTATÓ KÖZPONT 2007-BEN Mnyerczán András FÖMI Kozmikus Geodéziai Obszervatórium GIS Open, 2007 március 12, Székesfehérvár Tartalom A referenciaállomás-hálózat jelenlegi helyzete A GNSS
A GNSS SZOLGÁLTAT LTATÓ KÖZPONT 2007-BEN Mnyerczán András FÖMI Kozmikus Geodéziai Obszervatórium GIS Open, 2007 március 12, Székesfehérvár Tartalom A referenciaállomás-hálózat jelenlegi helyzete A GNSS
Matematikai geodéziai számítások 6.
 Matematikai geodéziai számítások 6. Lineáris regresszió számítás elektronikus távmérőkre Dr. Bácsatyai, László Matematikai geodéziai számítások 6.: Lineáris regresszió számítás elektronikus távmérőkre
Matematikai geodéziai számítások 6. Lineáris regresszió számítás elektronikus távmérőkre Dr. Bácsatyai, László Matematikai geodéziai számítások 6.: Lineáris regresszió számítás elektronikus távmérőkre
Matematikai geodéziai számítások 9.
 Nyugat-magyarországi Egyetem Geoinformatikai Kara Dr Bácsatyai László Matematikai geodéziai számítások 9 MGS9 modul Szabad álláspont kiegyenlítése SZÉKESFEHÉRVÁR 2010 Jelen szellemi terméket a szerzői
Nyugat-magyarországi Egyetem Geoinformatikai Kara Dr Bácsatyai László Matematikai geodéziai számítások 9 MGS9 modul Szabad álláspont kiegyenlítése SZÉKESFEHÉRVÁR 2010 Jelen szellemi terméket a szerzői
Csillagászati eszközök. Űrkutatás
 Csillagászati eszközök Űrkutatás Űrkutatás eszközei, módszerei Optikai eszközök Űrszondák, űrtávcsövek Ember a világűrben Műholdak Lencsés távcsövek Első távcső: Galilei (1609) Sok optikai hibája van.
Csillagászati eszközök Űrkutatás Űrkutatás eszközei, módszerei Optikai eszközök Űrszondák, űrtávcsövek Ember a világűrben Műholdak Lencsés távcsövek Első távcső: Galilei (1609) Sok optikai hibája van.
Navigáci. stervezés. Algoritmusok és alkalmazásaik. Osváth Róbert Sorbán Sámuel
 Navigáci ció és s mozgástervez stervezés Algoritmusok és alkalmazásaik Osváth Róbert Sorbán Sámuel Feladat Adottak: pálya (C), játékos, játékos ismerethalmaza, kezdőpont, célpont. Pálya szerkezete: akadályokkal
Navigáci ció és s mozgástervez stervezés Algoritmusok és alkalmazásaik Osváth Róbert Sorbán Sámuel Feladat Adottak: pálya (C), játékos, játékos ismerethalmaza, kezdőpont, célpont. Pálya szerkezete: akadályokkal
ÁLATALÁNOS METEOROLÓGIA 2. 01: METEOROLÓGIAI MÉRÉSEK ÉS MEGFIGYELÉSEK
 ÁLATALÁNOS METEOROLÓGIA 2. 01: METEOROLÓGIAI MÉRÉSEK ÉS MEGFIGYELÉSEK Célok, módszerek, követelmények CÉLOK, MÓDSZEREK Meteorológiai megfigyelések (Miért?) A meteorológiai mérések célja: Minőségi, szabvány
ÁLATALÁNOS METEOROLÓGIA 2. 01: METEOROLÓGIAI MÉRÉSEK ÉS MEGFIGYELÉSEK Célok, módszerek, követelmények CÉLOK, MÓDSZEREK Meteorológiai megfigyelések (Miért?) A meteorológiai mérések célja: Minőségi, szabvány
TÉRINFORMATIKA II. Dr. Kulcsár Balázs egyetemi docens. Debreceni Egyetem Műszaki Kar Műszaki Alaptárgyi Tanszék
 TÉRINFORMATIKA II. Dr. Kulcsár Balázs egyetemi docens Debreceni Egyetem Műszaki Kar Műszaki Alaptárgyi Tanszék ELSŐDLEGES ADATNYERÉSI ELJÁRÁSOK 2. Inerciális rendszerek Távérzékelés Rádiótelefonok Mobil
TÉRINFORMATIKA II. Dr. Kulcsár Balázs egyetemi docens Debreceni Egyetem Műszaki Kar Műszaki Alaptárgyi Tanszék ELSŐDLEGES ADATNYERÉSI ELJÁRÁSOK 2. Inerciális rendszerek Távérzékelés Rádiótelefonok Mobil
Matematikai geodéziai számítások 6.
 Nyugat-magyarországi Egyetem Geoinformatikai Kara Dr. Bácsatyai László Matematikai geodéziai számítások 6. MGS6 modul Lineáris regresszió számítás elektronikus távmérőkre SZÉKESFEHÉRVÁR 2010 Jelen szellemi
Nyugat-magyarországi Egyetem Geoinformatikai Kara Dr. Bácsatyai László Matematikai geodéziai számítások 6. MGS6 modul Lineáris regresszió számítás elektronikus távmérőkre SZÉKESFEHÉRVÁR 2010 Jelen szellemi
Geometriai adatnyerési eljárások
 Geometriai adatnyerési eljárások - kézi adatnyerési eljárások; - földi geodéziai eljárások; - mesterséges holdakon alapuló helymeghatározások (GPS); - fotogrammetriai módszerek; - távérzékelés; -meglévő
Geometriai adatnyerési eljárások - kézi adatnyerési eljárások; - földi geodéziai eljárások; - mesterséges holdakon alapuló helymeghatározások (GPS); - fotogrammetriai módszerek; - távérzékelés; -meglévő
Digitális mérőműszerek. Kaltenecker Zsolt Hiradástechnikai Villamosmérnök Szinusz Hullám Bt.
 Digitális mérőműszerek Digitális jelek mérése Kaltenecker Zsolt Hiradástechnikai Villamosmérnök Szinusz Hullám Bt. MIRŐL LESZ SZÓ? Mit mérjünk? Hogyan jelentkezik a minőségromlás digitális jel esetében?
Digitális mérőműszerek Digitális jelek mérése Kaltenecker Zsolt Hiradástechnikai Villamosmérnök Szinusz Hullám Bt. MIRŐL LESZ SZÓ? Mit mérjünk? Hogyan jelentkezik a minőségromlás digitális jel esetében?
Matematikai geodéziai számítások 9.
 Matematikai geodéziai számítások 9 Szabad álláspont kiegyenlítése Dr Bácsatyai, László Created by XMLmind XSL-FO Converter Matematikai geodéziai számítások 9: Szabad álláspont kiegyenlítése Dr Bácsatyai,
Matematikai geodéziai számítások 9 Szabad álláspont kiegyenlítése Dr Bácsatyai, László Created by XMLmind XSL-FO Converter Matematikai geodéziai számítások 9: Szabad álláspont kiegyenlítése Dr Bácsatyai,
Aktív GNSS hálózat fejlesztése
 Aktív GNSS hálózat fejlesztése a penci KGO-ban Horváth Tamás Rédey István Szeminárium, BME, 2004. november 17. Tartalom Háttér Abszolút GNSS helymeghatározás Standalone DGNSS és RTK referencia állomások
Aktív GNSS hálózat fejlesztése a penci KGO-ban Horváth Tamás Rédey István Szeminárium, BME, 2004. november 17. Tartalom Háttér Abszolút GNSS helymeghatározás Standalone DGNSS és RTK referencia állomások
Számítógépes hálózatok
 Számítógépes hálózatok 3.gyakorlat Fizikai réteg Kódolások, moduláció, CDMA Laki Sándor lakis@inf.elte.hu http://lakis.web.elte.hu 1 Második házi feladat 2 AM és FM analóg jel modulációja esetén Forrás:
Számítógépes hálózatok 3.gyakorlat Fizikai réteg Kódolások, moduláció, CDMA Laki Sándor lakis@inf.elte.hu http://lakis.web.elte.hu 1 Második házi feladat 2 AM és FM analóg jel modulációja esetén Forrás:
A sínek tesztelése örvényáramos technológiákat használva
 A sínek tesztelése örvényáramos technológiákat használva A DB Netz AG tapasztalatai DB Netz AG Richard Armbruster / Dr. Thomas Hempe/ Herbert Zück Fahrwegmessung / Fahrwegtechnik Békéscsaba, 2011.09.01.
A sínek tesztelése örvényáramos technológiákat használva A DB Netz AG tapasztalatai DB Netz AG Richard Armbruster / Dr. Thomas Hempe/ Herbert Zück Fahrwegmessung / Fahrwegtechnik Békéscsaba, 2011.09.01.
Automatikus Fedélzeti Irányító Rendszerek. Navigációs rendszerek a pilóta szemszögéből Tóth Gábor
 Automatikus Fedélzeti Irányító Rendszerek Navigációs rendszerek a pilóta szemszögéből Tóth Gábor VFR Visual Flight Rules A navigáció folyamatos földlátást igényel Minimálisan 5 km látástávolság szükséges
Automatikus Fedélzeti Irányító Rendszerek Navigációs rendszerek a pilóta szemszögéből Tóth Gábor VFR Visual Flight Rules A navigáció folyamatos földlátást igényel Minimálisan 5 km látástávolság szükséges
A vasút életéhez. Örvény-áramú sínpálya vizsgáló a Shinkawa-tól. Certified by ISO9001 SHINKAWA
 SHINKAWA Certified by ISO9001 Örvény-áramú sínpálya vizsgáló a Shinkawa-tól Technikai Jelentés A vasút életéhez A Shinkawa örvény-áramú sínpálya vizsgáló rendszer, gyors állapotmeghatározásra képes, még
SHINKAWA Certified by ISO9001 Örvény-áramú sínpálya vizsgáló a Shinkawa-tól Technikai Jelentés A vasút életéhez A Shinkawa örvény-áramú sínpálya vizsgáló rendszer, gyors állapotmeghatározásra képes, még
Mérési hibák 2006.10.04. 1
 Mérési hibák 2006.10.04. 1 Mérés jel- és rendszerelméleti modellje Mérési hibák_labor/2 Mérési hibák mérési hiba: a meghatározandó értékre a mérés során kapott eredmény és ideális értéke közötti különbség
Mérési hibák 2006.10.04. 1 Mérés jel- és rendszerelméleti modellje Mérési hibák_labor/2 Mérési hibák mérési hiba: a meghatározandó értékre a mérés során kapott eredmény és ideális értéke közötti különbség
PISA2000. Nyilvánosságra hozott feladatok matematikából
 PISA2000 Nyilvánosságra hozott feladatok matematikából Tartalom Tartalom 3 Almafák 8 Földrész területe 12 Háromszögek 14 Házak 16 Versenyautó sebessége Almafák M136 ALMAFÁK Egy gazda kertjében négyzetrács
PISA2000 Nyilvánosságra hozott feladatok matematikából Tartalom Tartalom 3 Almafák 8 Földrész területe 12 Háromszögek 14 Házak 16 Versenyautó sebessége Almafák M136 ALMAFÁK Egy gazda kertjében négyzetrács