Infokommunikáció a közlekedésben (VITMJV27)
|
|
|
- Gusztáv Kocsis
- 8 évvel ezelőtt
- Látták:
Átírás

1 (VITMJV27) Hely fogalma, pozícionálási alapok, cellás pozícionálási technikák Heszberger Zalán
 jelterjedési idő mérés (TOA) jelterjedés különbség mérés beérkezési szög mérés")
2 Pozícionálási technológiák A pozícionálás fő elvei: bázispontok/állomások pontos helye ismert mért jel konverziója távolság (vagy szög) mértékké bázisállomástól való távolságok összesége kijelöli a pozíciót Főbb mérési eljárások jelenlétérzékelés (COO) jelterjedési idő mérés (TOA) jelterjedés különbség mérés beérkezési szög mérés (AOA)

3 Pozícionálási technikák alkalmási területei
4 Hely fogalma Hely, helyzet Fizikai hely Virtuális hely (pl. webhely) Térbeli hely: pozíció Hálózati hely: pl. mobil hálózati cella szintű IP cím az interneten stb. Hely leírás: pl. város, út, egyéb környezet stb. A fordítás az egyes hely típusok között: GIS, térkép adatbázisok
 Projekció (ha az információ egy síkbeli térképre vonatkozik) A föld legmagasabb pontja:?")
5 Térbeli hely komponensek Térbeli hely magadása valamilyen referencia alapján történhet Referencia adatok típusai: Koordináta rendszer Datum (az angolszász terminológiában /ill. a latinból átvéve/ a datum a data szó egyes száma, jelentése: adat, jelzőpont kitűzőhely) Projekció (ha az információ egy síkbeli térképre vonatkozik) A föld legmagasabb pontja:???
 Origo: föld középpontja A földdel")
6 Koordináta rendszer A koordináta rendszert meghatározó adatok: a koordináta rendszer típusa, pl. Descartes dimenziója az origó a tengelyek skálája a tengelyek iránya A Descates koordináta rendszer: ECEF (Earth Centered Earth fixed) Origo: föld középpontja A földdel együtt forog Z tengely: északi sark XY sík: egyenlítő XZ sík: főmeridian (Greenwich)

7 A Föld gömbölyű?
 hosszúsági kör (logitudinális vagy merídián) magasság (altitude, eleváció) Geodetikus magasság: a referenciaelipszoidtól számított")
8 Elipszoid koordináta rendszer A föld felszínét elipszoiddal modellezi A föld alakja valójában lapított a forgás miatt Két plusz adat: egyenlítői sugár sarki sugár Két szög a koordináta síkoktól: szélességi kör az origóból (latitude vagy parallel) hosszúsági kör (logitudinális vagy merídián) magasság (altitude, eleváció) Geodetikus magasság: a referenciaelipszoidtól számított magaság
9 Elipsoid koordináta rendszer: Koordináta értékek megadása Magasság: hosszúság dimenzió (km, m, cm) Szélesség, hosszúság: fok perc: fok/60 másodperc: perc/60 néha tized ill. századfok 1 szélességi fok az egyenlítőnél~40000km/360=111,1 km 1 másodperc ~31m magassági fok mindig ennyi Koordináta pont megadása pl. Eleváció 100m, Északi szélesség 47 o 18 12,9, Keleti hosszúság 11 o 23 36,2 Nemzetközi Merídián Konferencia, 1884: hosszúság 0 o Royal Greenwich Observatory GMT: Greenwich Mean Time UTC: Coordinated Universal Time

10 Horizontális dátum Horizontális dátum: Referencia elipszoiddal közelíti a föld alakját, egyéb egyenetlenségeket nem vesz figyelembe, a magasság néha 100 pontatlanságot is elérheti
11 Horizontális dátum referencia elipszoidok Lapultság (Flattening) = (egyenlítői sugár-poláris sugár)/egyenlítői sugár Referencia elipszoidok az évek során:
12 Lokális horizontális dátumok A horizontális dátumok globálisan nemigen használhatóak a nagy pontatlanság miatt Lokális illesztett elipszoidok azonban elég jók lehetnek Adott helyeken rögzített lokális horizontális dátumok: (a geocentertől való eltérésük függvényében)

13 Globális és lokális dátumok kapcsolata Lokális dátum központja, valamely terület esetén egy jól meghatározott pontban, pl. a terület középpontja környezetében van (Európa estén pl. Németországban Potsdamban)

14 Vertikális dátum Vertikális dátum: Minden helyen a közepes tengerszintet igyekszik megadni Tengerszint változásának okai: hullámok ár-apály folyamata Geoid: a föld egy ekvigravitációs felülete, mely nagyjából a közepes tengerszintre van beállítva

15 Magassági adatok típusai Ortometrikus magasság: Geoidtól való távolsága a föld felszínének Geodetikus magasság: A referencia elipszoidtól való magasság A Geoid magassága: A Geoid eltérése a referencia elipszoidtól A WGS-84 rögzít egy globális horizontális dátumot ill. egy vertikális dátumot is N ~ max. 100m, de tipusan néhány 10 méter

16 GPS alapú pozícionálás folyamata GPS pozícionálási lépések 1. A GPS rendszer segítségével meghatározzuk a koordinátákat az ECEF Decartes koordináta renszerben 2. Ebből kiszámoljuk a szélességi és hosszúsági fokokat ill. a geodetikus magasságot 3. Kiszámoljuk az orthometrikus magasságot, melyhez rendelkezésre áll egy kb. 10x10 méteres felbontású adathalmaz a geoid magasság adatairól A használt adatbázist a WGS-84 rögzíti. A még pontosabb értékhez a 10x10-es négyzethálón interpolációval számolunk Használhatunk még pontosabb felbontású adatbázist is Adatbázisok különböző felbontással elérhetőek a NIMA-tól (National Imagery and Mapping Agency)
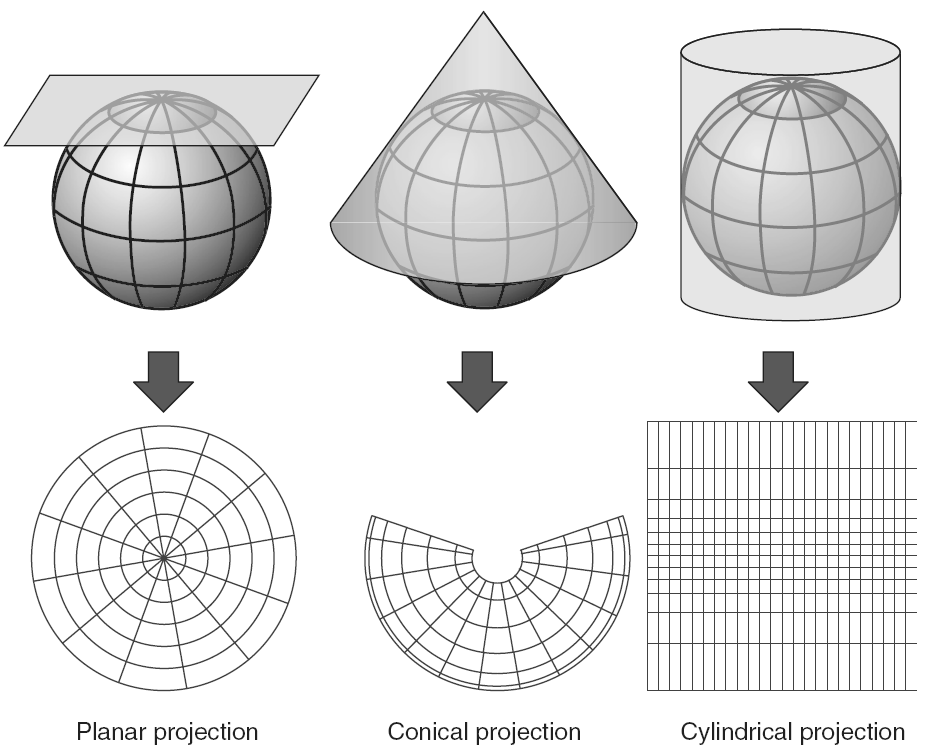
17 Térkép projekciók
18 Projekciók torzításai Területi torzítás: A valós területek aránya különbözik a síkban ábrázolt térkép esetén Ha nincs ilyen jellegű torzítás akkor a projekció területtartó (pl. tematikus térképek) Szögtorzítás: Az egyes fölterületek alakja megváltozik. Ha ilyen nincs akkor a projekció alaktartó (pl. navigációs térképek) Skálatorzítás: A hosszak aránya eltérő a síkban. Gyakorlatilag minden projekció rendelkezik ilyen tulajdonsággal kisebbnagyobb mértékben Távolság torzítás: Ha bármely pont egy referenciaponttól való távolsága a projekció során megváltozik Ha ilyen nincs akkor távolságtartó leképezésről beszélünk (referencia ponttól való távolság mérése esetén használatos térképek) Irány torzítás: Referenciapont és bármely más pont közötti azimuth megváltozik

19 Mercator projekciók Gerhardus Mercator finn matematikus és térképész 1568-ban alkalmazta először

20 Tranzverzális mercator projekció Johann Heinrich Lambert 1772:
21 UTM Universal Traverse Mercator Az amerikai hadsereg fejlesztette Az egész földet megfelelő pontossággal leírja Két dimenziós Decartes koordináta renszer Tranzvezális Mercator projekciók sorozata 6 o -onként A sarkokon a nagy torzítás elkerülése érdekében a szélességi köröknél korlátozva van északon 84, délen 80 foknál A térkép zónákra osztott: 900 km x km Az északi és a déli félteke külön koordináta renszerben Zónák számozása sorrendben 1. W180-W172, 60 E A katonai térképek jelölése a zónát további részekre bontja és azon belül határozza meg a pontos koordinátát
22 UTM Universal Traverse Mercator

23 UTM katonai verzió
24 Pozíció adatok koordináta rendszerekben Több különböző koordináta rendszer létezik tehát Sokszor nemzeti szabványok alapján LBS esetén különböző koordináta rendszerek megjelölésére az EPSG (European Petroleum Survey Group) vezetett be jelölést (pl. az EPSG:4326 jelöli a WGS-84 rendszert)
25 Pozícionálás Pozícionáláshoz szükséges komponensek: adott paraméterek megfigyelése méréssel szög, távolság, távolság különbség, sebesség stb. fix pontokhoz relatíve pilot jel: radiohullámok, infravörös hullámok, ultrahang hullámok rádiólokációs és nem rádiólokációs technikák pozíció számítása körkörös vagy hiperbolikus lateráció, szögmérés leíró vagy térbeli referencia rendszer datum ill. koordináta rendszer stb. infrastruktúra műholdak, cellás mobil hálózatok protokollok az egyes komponensek közötti kommunikációhoz
26 Mérési módszerek összefoglalása Pozícionlálási eljárás Megfigyelt adat Mérés módja Érzékelés közelség alapján cella azonosító, koordináta adott jel puszta észlelése Háromszögelés távolság vagy távolság különbség pilot jel átviteli ideje, átviteli idő különbség Irányszög mérés szög antenna hálók Differenciális pozíciószámítás dead reckoning Mintaillesztés pozíció, mozgás irány, sebesség, távolság kép jellegű információ, egyéb adatok mintáinak ismerete giroszkóp, sebességmérő, fordulatszámmérő kamera, egyéb jelerősség mérés
27 Infrastruktúra
28 Felhasznált irodalom Stefan Steiniger, Moritz Neun, Alistar Edwardes: Foundations of Location Based Services Axel Küpper: Locaton-based Services Fundamentals and Operation M.A. Dru, S.Saada: Location-based Mobile Services: The Essentials HTE Híradástechnika folyóirat szeptemberi különszám: Közlekedési kommunikációs renszerek
GPS mérési jegyz könyv
 GPS mérési jegyz könyv Mérést végezte: Csutak Balázs, Laczkó Hunor Mérés helye: ITK 320. terem és az egyetem környéke Mérés ideje: 2016.03.16 A mérés célja: Ismerkedés a globális helymeghatározó rendszerrel,
GPS mérési jegyz könyv Mérést végezte: Csutak Balázs, Laczkó Hunor Mérés helye: ITK 320. terem és az egyetem környéke Mérés ideje: 2016.03.16 A mérés célja: Ismerkedés a globális helymeghatározó rendszerrel,
Egy pont földfelszíni helyzetét meghatározzák: a pont alapfelületi földrajzi koordinátái a pont tengerszint feletti magassága
 Földrajzi koordináták Egy pont földfelszíni helyzetét meghatározzák: a pont alapfelületi földrajzi koordinátái a pont tengerszint feletti magassága Topo-Karto-2 1 Földrajzi koordináták pólus egyenlítő
Földrajzi koordináták Egy pont földfelszíni helyzetét meghatározzák: a pont alapfelületi földrajzi koordinátái a pont tengerszint feletti magassága Topo-Karto-2 1 Földrajzi koordináták pólus egyenlítő
Koordináta-rendszerek
 Koordináta-rendszerek Térkép: a Föld felszín (részletének) ábrázolása síkban Hogyan határozható meg egy pont helyzete egy síkon? Derékszögű koordináta-rendszer: a síkban két, egymást merőlegesen metsző
Koordináta-rendszerek Térkép: a Föld felszín (részletének) ábrázolása síkban Hogyan határozható meg egy pont helyzete egy síkon? Derékszögű koordináta-rendszer: a síkban két, egymást merőlegesen metsző
A Föld alakja TRANSZFORMÁCIÓ. Magyarországon még használatban lévő vetületi rendszerek. Miért kell transzformálni? Főbb transzformációs lehetőségek
 TRANSZFORMÁCIÓ A Föld alakja -A föld alakja: geoid (az a felület, amelyen a nehézségi gyorsulás értéke állandó) szabálytalan alak, kezelése nehéz -A geoidot ellipszoiddal közelítjük -A földfelszíni pontokat
TRANSZFORMÁCIÓ A Föld alakja -A föld alakja: geoid (az a felület, amelyen a nehézségi gyorsulás értéke állandó) szabálytalan alak, kezelése nehéz -A geoidot ellipszoiddal közelítjük -A földfelszíni pontokat
Navigációs és helyalapú szolgáltatások és alkalmazások (VITMMA07)
") Navigációs és helyalapú szolgáltatások és alkalmazások (VITMMA07) Bevezető előadás - Hely alapú szolgáltatások és alkalmazások Heszberger Zalán Tantárgyi követelmények Szorgalmi időszak: ZH : 2016. október
Navigációs és helyalapú szolgáltatások és alkalmazások (VITMMA07) Bevezető előadás - Hely alapú szolgáltatások és alkalmazások Heszberger Zalán Tantárgyi követelmények Szorgalmi időszak: ZH : 2016. október
Helymeghatározás. Hol vagyok a világban?
 Helymeghatározás Hol vagyok a világban? Miről lesz mostanában szó? Módszerek Hálózati információk GPS és hálózat alapján Proximity események Google Geo API Térkép nézet Diploma tippek Általánosságban Elvárt
Helymeghatározás Hol vagyok a világban? Miről lesz mostanában szó? Módszerek Hálózati információk GPS és hálózat alapján Proximity események Google Geo API Térkép nézet Diploma tippek Általánosságban Elvárt
FÖLDRAJZI HELYMEGHATÁROZ ÉGBOLTON
 TÁJÉKOZÓDÁS S A FÖLDÖN TÉRBEN ÉS ID BEN Készítette: Mucsi Zoltán FÖLDRAJZI HELYMEGHATÁROZ ROZÁS S AZ ÉGBOLTON A NAP, A CSILLAGOK ÉS S A HOLD LÁTSZL TSZÓLAGOS MOZGÁSAI AZ ÓKOR ÓTA LÁTÓHATÁR(HORIZONT): AZ
TÁJÉKOZÓDÁS S A FÖLDÖN TÉRBEN ÉS ID BEN Készítette: Mucsi Zoltán FÖLDRAJZI HELYMEGHATÁROZ ROZÁS S AZ ÉGBOLTON A NAP, A CSILLAGOK ÉS S A HOLD LÁTSZL TSZÓLAGOS MOZGÁSAI AZ ÓKOR ÓTA LÁTÓHATÁR(HORIZONT): AZ
1. Olvassuk be két pont koordinátáit: (x1, y1) és (x2, y2). Határozzuk meg a két pont távolságát és nyomtassuk ki.
 és (x2, y2). Határozzuk meg a két pont távolságát és nyomtassuk ki.") Számítás:. Olvassuk be két pont koordinátáit: (, y) és (2, y2). Határozzuk meg a két pont távolságát és nyomtassuk ki. 2. Olvassuk be két darab két dimenziós vektor komponenseit: (a, ay) és (b, by). Határozzuk
Számítás:. Olvassuk be két pont koordinátáit: (, y) és (2, y2). Határozzuk meg a két pont távolságát és nyomtassuk ki. 2. Olvassuk be két darab két dimenziós vektor komponenseit: (a, ay) és (b, by). Határozzuk
Koordinátarendszerek, dátumok, GPS
 Koordinátarendszerek, dátumok, GPS KOORDINÁTARENDSZEREK A SPATIAL-BEN Koordinátarendszer típusok 1. Descartes-féle koordinátarendszer: egy adott pontból (origó) kiinduló, egymásra merőleges egyenesek alkotják,
Koordinátarendszerek, dátumok, GPS KOORDINÁTARENDSZEREK A SPATIAL-BEN Koordinátarendszer típusok 1. Descartes-féle koordinátarendszer: egy adott pontból (origó) kiinduló, egymásra merőleges egyenesek alkotják,
Enhanced Observed Time Difference (E- OTD)
") Enhanced Observed Time Difference (E- OTD) dr. Paller Gábor Készült Axel Küpper: Location-Based Services: Fundamentals and Operation c. könyve alapján E-OTD E-OTD: hiperbolikus háromszögelés a terminál
Enhanced Observed Time Difference (E- OTD) dr. Paller Gábor Készült Axel Küpper: Location-Based Services: Fundamentals and Operation c. könyve alapján E-OTD E-OTD: hiperbolikus háromszögelés a terminál
Alapok GPS előzmnyei Navstar How the GPS locate the position Tények Q/A GPS. Varsányi Péter
 Alapok előzmnyei Navstar How the locate the position Tények Q/A Óbudai Egyetem Alba Regia Egyetemi Központ (AREK) Székesfehérvár 2011. december 8. Alapok előzmnyei Navstar How the locate the position Tények
Alapok előzmnyei Navstar How the locate the position Tények Q/A Óbudai Egyetem Alba Regia Egyetemi Központ (AREK) Székesfehérvár 2011. december 8. Alapok előzmnyei Navstar How the locate the position Tények
Mozgásmodellezés. Lukovszki Csaba. Navigációs és helyalapú szolgáltatások és alkalmazások (VITMMA07)
") TÁVKÖZLÉSI ÉS MÉDIAINFORMATIKAI TANSZÉK () BUDAPESTI MŰSZAKI ÉS GAZDASÁGTUDOMÁNYI EGYETEM (BME) Mozgásmodellezés Lukovszki Csaba Áttekintés» Probléma felvázolása» Szabadsági fokok» Diszkretizált» Hibát
TÁVKÖZLÉSI ÉS MÉDIAINFORMATIKAI TANSZÉK () BUDAPESTI MŰSZAKI ÉS GAZDASÁGTUDOMÁNYI EGYETEM (BME) Mozgásmodellezés Lukovszki Csaba Áttekintés» Probléma felvázolása» Szabadsági fokok» Diszkretizált» Hibát
MOBIL TÉRKÉPEZŐ RENDSZER PROJEKT TAPASZTALATOK
 MOBIL TÉRKÉPEZŐ RENDSZER PROJEKT TAPASZTALATOK GISopen 2011 2011. március 16-18. Konasoft Project Tanácsadó Kft. Maros Olivér - projektvezető MIÉRT MOBIL TÉRKÉPEZÉS? A mobil térképezés egyetlen rendszerben
MOBIL TÉRKÉPEZŐ RENDSZER PROJEKT TAPASZTALATOK GISopen 2011 2011. március 16-18. Konasoft Project Tanácsadó Kft. Maros Olivér - projektvezető MIÉRT MOBIL TÉRKÉPEZÉS? A mobil térképezés egyetlen rendszerben
Cellaazonosító és timing advance
 Cellaazonosító és timing advance dr. Paller Gábor Készült Axel Küpper: Location-Based Services: Fundamentals and Operation c. könyve alapján GSM rádiós interfész GSM frekvenciák: 850 MHz Észak-Amerika
Cellaazonosító és timing advance dr. Paller Gábor Készült Axel Küpper: Location-Based Services: Fundamentals and Operation c. könyve alapján GSM rádiós interfész GSM frekvenciák: 850 MHz Észak-Amerika
Mechatronika segédlet 3. gyakorlat
 Mechatronika segédlet 3. gyakorlat 2017. február 20. Tartalom Vadai Gergely, Faragó Dénes Feladatleírás... 2 Fogaskerék... 2 Nézetváltás 3D modellezéshez... 2 Könnyítés megvalósítása... 2 A fogaskerék
Mechatronika segédlet 3. gyakorlat 2017. február 20. Tartalom Vadai Gergely, Faragó Dénes Feladatleírás... 2 Fogaskerék... 2 Nézetváltás 3D modellezéshez... 2 Könnyítés megvalósítása... 2 A fogaskerék
Intelligens Közlekedési Rendszerek 2
 Intelligens Közlekedési Rendszerek 2 Máté Miklós 2016 Október 11 1 / 14 Szenzor (érzékelő): mérés, detektálás Mérés elmélet emlékeztető Jó mérőműszer tulajdonságai Érzékeny a mérendő tulajdonságra Érzéketlen
Intelligens Közlekedési Rendszerek 2 Máté Miklós 2016 Október 11 1 / 14 Szenzor (érzékelő): mérés, detektálás Mérés elmélet emlékeztető Jó mérőműszer tulajdonságai Érzékeny a mérendő tulajdonságra Érzéketlen
Új szolgáltatási képességek I.: földrajzi hely alapú szolgáltatások
 Budapesti Műszaki és Gazdaságtudományi Egyetem Villamosmérnöki és Informatikai Kar Mérnök informatikus szak, mesterképzés Hírközlő rendszerek biztonsága szakirány Villamosmérnöki szak, mesterképzés - Újgenerációs
Budapesti Műszaki és Gazdaságtudományi Egyetem Villamosmérnöki és Informatikai Kar Mérnök informatikus szak, mesterképzés Hírközlő rendszerek biztonsága szakirány Villamosmérnöki szak, mesterképzés - Újgenerációs
Infobionika ROBOTIKA. X. Előadás. Robot manipulátorok II. Direkt és inverz kinematika. Készült a HEFOP P /1.0 projekt keretében
 Infobionika ROBOTIKA X. Előadás Robot manipulátorok II. Direkt és inverz kinematika Készült a HEFOP-3.3.1-P.-2004-06-0018/1.0 projekt keretében Tartalom Direkt kinematikai probléma Denavit-Hartenberg konvenció
Infobionika ROBOTIKA X. Előadás Robot manipulátorok II. Direkt és inverz kinematika Készült a HEFOP-3.3.1-P.-2004-06-0018/1.0 projekt keretében Tartalom Direkt kinematikai probléma Denavit-Hartenberg konvenció
Műholdas infokommunikációs rendszerek
 Mobil Informatika Műholdas infokommunikációs rendszerek Dr. Kutor László OE-NIK, Dr.Kutor László MoI 4/24/1 Műholdas távközlési rendszerek GEO (Geostationary Earth Orbit Satellite) Geostacionáris pályán
Mobil Informatika Műholdas infokommunikációs rendszerek Dr. Kutor László OE-NIK, Dr.Kutor László MoI 4/24/1 Műholdas távközlési rendszerek GEO (Geostationary Earth Orbit Satellite) Geostacionáris pályán
A PPP. a vonatkoztatási rendszer, az elmélet és gyakorlat összefüggése egy Fehérvár környéki kísérleti GNSS-mérés tapasztalatai alapján
 GISopen konferencia, Székesfehérvár, 2017. 04. 11-13. A PPP a vonatkoztatási rendszer, az elmélet és gyakorlat összefüggése egy Fehérvár környéki kísérleti GNSS-mérés tapasztalatai alapján Busics György
GISopen konferencia, Székesfehérvár, 2017. 04. 11-13. A PPP a vonatkoztatási rendszer, az elmélet és gyakorlat összefüggése egy Fehérvár környéki kísérleti GNSS-mérés tapasztalatai alapján Busics György
Matematikai geodéziai számítások 1.
 Matematikai geodéziai számítások 1 Ellipszoidi számítások, ellipszoid, geoid és terep metszete Dr Bácsatyai, László Created by XMLmind XSL-FO Converter Matematikai geodéziai számítások 1: Ellipszoidi számítások,
Matematikai geodéziai számítások 1 Ellipszoidi számítások, ellipszoid, geoid és terep metszete Dr Bácsatyai, László Created by XMLmind XSL-FO Converter Matematikai geodéziai számítások 1: Ellipszoidi számítások,
GPS szótár. A legfontosabb 25 kifejezés a GPS világából. Készítette: Gere Tamás A GPSArena.hu alapítója
 A legfontosabb 25 kifejezés a GPS világából Készítette: Gere Tamás A GPSArena.hu alapítója 2D/3D vétel Megadja, hogy a GPS vétel síkbeli (2D) vagy térbeli (3D). Utóbbi esetben magassági adat is rendelkezésre
A legfontosabb 25 kifejezés a GPS világából Készítette: Gere Tamás A GPSArena.hu alapítója 2D/3D vétel Megadja, hogy a GPS vétel síkbeli (2D) vagy térbeli (3D). Utóbbi esetben magassági adat is rendelkezésre
Transzformációk. Szécsi László
 Transzformációk Szécsi László A feladat Adott a 3D modell háromszögek csúcspontjai [modellezési koordináták] Háromszögkitöltő algoritmus pixeleket színez be [viewport koordináták] A feladat: számítsuk
Transzformációk Szécsi László A feladat Adott a 3D modell háromszögek csúcspontjai [modellezési koordináták] Háromszögkitöltő algoritmus pixeleket színez be [viewport koordináták] A feladat: számítsuk
LOKÁLIS IONOSZFÉRA MODELLEZÉS ÉS ALKALMAZÁSA A GNSS HELYMEGHATÁROZÁSBAN
 LOKÁLIS IONOSZFÉRA MODELLEZÉS ÉS ALKALMAZÁSA A GNSS HELYMEGHATÁROZÁSBAN Juni Ildikó Budapesti Műszaki és Gazdaságtudományi Egyetem BSc IV. évfolyam Konzulens: Dr. Rózsa Szabolcs MFTT 29. Vándorgyűlés,
LOKÁLIS IONOSZFÉRA MODELLEZÉS ÉS ALKALMAZÁSA A GNSS HELYMEGHATÁROZÁSBAN Juni Ildikó Budapesti Műszaki és Gazdaságtudományi Egyetem BSc IV. évfolyam Konzulens: Dr. Rózsa Szabolcs MFTT 29. Vándorgyűlés,
Térinformatika. A vonatkozási és koordináta rendszerek szerepe. Vonatkozási és koordináta rendszerek. Folytonos vonatkozási rendszer
 Térinformatika Vonatkozási és koordináta rendszerek Dr. Szabó György BME Fotogrammetria és Térinformatika Tanszék A vonatkozási és koordináta rendszerek szerepe Heterogén jelenségek közös referencia kerete
Térinformatika Vonatkozási és koordináta rendszerek Dr. Szabó György BME Fotogrammetria és Térinformatika Tanszék A vonatkozási és koordináta rendszerek szerepe Heterogén jelenségek közös referencia kerete
Nagyfelbontású magassági szélklimatológiai információk dinamikai elıállítása
 Nagyfelbontású magassági szélklimatológiai információk dinamikai elıállítása Szépszó Gabriella Országos Meteorológiai Szolgálat Éghajlati Osztály, Klímamodellezı Csoport Együttmőködési lehetıségek a hidrodinamikai
Nagyfelbontású magassági szélklimatológiai információk dinamikai elıállítása Szépszó Gabriella Országos Meteorológiai Szolgálat Éghajlati Osztály, Klímamodellezı Csoport Együttmőködési lehetıségek a hidrodinamikai
DIGITÁLIS TEREPMODELL A TÁJRENDEZÉSBEN
 DIGITÁLIS TEREPMODELL A TÁJRENDEZÉSBEN DR. GIMESI LÁSZLÓ Bevezetés Pécsett és környékén végzett bányászati tevékenység felszámolása kapcsán szükségessé vált az e tevékenység során keletkezett meddők, zagytározók,
DIGITÁLIS TEREPMODELL A TÁJRENDEZÉSBEN DR. GIMESI LÁSZLÓ Bevezetés Pécsett és környékén végzett bányászati tevékenység felszámolása kapcsán szükségessé vált az e tevékenység során keletkezett meddők, zagytározók,
Pálya : Az a vonal, amelyen a mozgó tárgy, test végighalad. Út: A pályának az a része, amelyet adott idő alatt a mozgó tárgy megtesz.
 Haladó mozgások A hely és a mozgás viszonylagos. A testek helyét, mozgását valamilyen vonatkoztatási ponthoz, vonatkoztatási rendszerhez képest adjuk meg, ahhoz viszonyítjuk. pl. A vonatban utazó ember
Haladó mozgások A hely és a mozgás viszonylagos. A testek helyét, mozgását valamilyen vonatkoztatási ponthoz, vonatkoztatási rendszerhez képest adjuk meg, ahhoz viszonyítjuk. pl. A vonatban utazó ember
INFORMATIKA ÁGAZATI ALKALMAZÁSAI. Az Agrármérnöki MSc szak tananyagfejlesztése TÁMOP /1/A
 INFORMATIKA ÁGAZATI ALKALMAZÁSAI Az Agrármérnöki MSc szak tananyagfejlesztése TÁMOP-4.1.2-08/1/A-2009-0010 14. GIS feldolgozás, méréselőkészítés Desktop méréselőkészítés Méréselőkészítés a kontrolleren
INFORMATIKA ÁGAZATI ALKALMAZÁSAI Az Agrármérnöki MSc szak tananyagfejlesztése TÁMOP-4.1.2-08/1/A-2009-0010 14. GIS feldolgozás, méréselőkészítés Desktop méréselőkészítés Méréselőkészítés a kontrolleren
Mozgó jármű helyzetének és tájolásának meghatározása alacsony árú GNSS és inerciális érzékelők szoros csatolású integrációjával
 Mozgó jármű helyzetének és tájolásának meghatározása alacsony árú GNSS és inerciális érzékelők szoros csatolású integrációjával Farkas Márton Rédey István Geodéziai Szeminárium 2019. április 2. Áttekintés
Mozgó jármű helyzetének és tájolásának meghatározása alacsony árú GNSS és inerciális érzékelők szoros csatolású integrációjával Farkas Márton Rédey István Geodéziai Szeminárium 2019. április 2. Áttekintés
A GNSS infrastruktúrára támaszkodó műholdas helymeghatározás. Borza Tibor (FÖMI KGO) Busics György (NyME GEO)
 Busics György (NyME GEO)") A GNSS infrastruktúrára támaszkodó műholdas helymeghatározás Borza Tibor (FÖMI KGO) Busics György (NyME GEO) Tartalom Mi a GNSS, a GNSS infrastruktúra? Melyek az infrastruktúra szintjei? Mi a hazai helyzet?
A GNSS infrastruktúrára támaszkodó műholdas helymeghatározás Borza Tibor (FÖMI KGO) Busics György (NyME GEO) Tartalom Mi a GNSS, a GNSS infrastruktúra? Melyek az infrastruktúra szintjei? Mi a hazai helyzet?
A LÉGKÖRBEN HATÓ ERŐK, EGYENSÚLYI MOZGÁSOK A LÉGKÖRBEN
 A LÉGKÖRBEN HATÓ ERŐK, EGYENSÚLYI MOZGÁSOK A LÉGKÖRBEN Egy testre ható erő a más testekkel való kölcsönhatás mértékére jellemző fizikai mennyiség. A légkörben ható erők Külső erők: A Föld tömegéből következő
A LÉGKÖRBEN HATÓ ERŐK, EGYENSÚLYI MOZGÁSOK A LÉGKÖRBEN Egy testre ható erő a más testekkel való kölcsönhatás mértékére jellemző fizikai mennyiség. A légkörben ható erők Külső erők: A Föld tömegéből következő
Agrár-környezetvédelmi Modul Agrár-környezetvédelem, agrotechnológia. KÖRNYEZETGAZDÁLKODÁSI MÉRNÖKI MSc TERMÉSZETVÉDELMI MÉRNÖKI MSc
 Agrár-környezetvédelmi Modul Agrár-környezetvédelem, agrotechnológia KÖRNYEZETGAZDÁLKODÁSI MÉRNÖKI MSc TERMÉSZETVÉDELMI MÉRNÖKI MSc A művelést segítő szenzorok és monitorok I. 139.lecke Globális helymeghatározás
Agrár-környezetvédelmi Modul Agrár-környezetvédelem, agrotechnológia KÖRNYEZETGAZDÁLKODÁSI MÉRNÖKI MSc TERMÉSZETVÉDELMI MÉRNÖKI MSc A művelést segítő szenzorok és monitorok I. 139.lecke Globális helymeghatározás
Matematika 11 Koordináta geometria. matematika és fizika szakos középiskolai tanár. > o < szeptember 27.
 Matematika 11 Koordináta geometria Juhász László matematika és fizika szakos középiskolai tanár > o < 2015. szeptember 27. copyright: c Juhász László Ennek a könyvnek a használatát szerzői jog védi. A
Matematika 11 Koordináta geometria Juhász László matematika és fizika szakos középiskolai tanár > o < 2015. szeptember 27. copyright: c Juhász László Ennek a könyvnek a használatát szerzői jog védi. A
IGÉNYLŐ ÁLTAL VÉGEZHETŐ TERVKÉSZÍTÉS KÖVETELMÉNYEI
 FREKVENCIAGAZDÁLKODÁSI IGAZGATÓSÁG IGÉNYLŐ ÁLTAL VÉGEZHETŐ TERVKÉSZÍTÉS KÖVETELMÉNYEI URH FM RÁDIÓADÓ Budapest 2008 március I. A frekvenciaterv követelményei és kötelező tartalma 1. Tervezési feladat A
FREKVENCIAGAZDÁLKODÁSI IGAZGATÓSÁG IGÉNYLŐ ÁLTAL VÉGEZHETŐ TERVKÉSZÍTÉS KÖVETELMÉNYEI URH FM RÁDIÓADÓ Budapest 2008 március I. A frekvenciaterv követelményei és kötelező tartalma 1. Tervezési feladat A
A FÖLDMINŐSÍTÉS GEOMETRIAI ALAPJAI
 A FÖLDMINŐSÍTÉS GEOMETRIAI ALAPJAI Detrekői Ákos Keszthely, 2003. 12. 11. TARTALOM 1 Bevezetés 2 Milyen geometriai adatok szükségesek? 3 Néhány szó a referencia rendszerekről 4 Geometriai adatok forrásai
A FÖLDMINŐSÍTÉS GEOMETRIAI ALAPJAI Detrekői Ákos Keszthely, 2003. 12. 11. TARTALOM 1 Bevezetés 2 Milyen geometriai adatok szükségesek? 3 Néhány szó a referencia rendszerekről 4 Geometriai adatok forrásai
4/2013. (II. 27.) BM rendelet
 BM rendelet") 4/2013. (II. 27.) BM rendelet Magyarország, Románia és Ukrajna államhatárai találkozási pontjának megjelölésére felállított TÚR határjelről készült Jegyzőkönyv jóváhagyásáról Az államhatárról szóló 2007.
4/2013. (II. 27.) BM rendelet Magyarország, Románia és Ukrajna államhatárai találkozási pontjának megjelölésére felállított TÚR határjelről készült Jegyzőkönyv jóváhagyásáról Az államhatárról szóló 2007.
Helymeghatározó technikák
 Mobil Informatika Dr. Kutor László Helymeghatározó technikák http://uni-obuda.hu/users/kutor/ MoI 5/24/1 Műholdas távközlési rendszerek GEO (Geostationary Earth Orbit Satellite) Geostacionáris pályán keringő
Mobil Informatika Dr. Kutor László Helymeghatározó technikák http://uni-obuda.hu/users/kutor/ MoI 5/24/1 Műholdas távközlési rendszerek GEO (Geostationary Earth Orbit Satellite) Geostacionáris pályán keringő
Regresszió számítás. Tartalomjegyzék: GeoEasy V2.05+ Geodéziai Kommunikációs Program
 Regresszió számítás GeoEasy V2.05+ Geodéziai Kommunikációs Program DigiKom Kft. 2006-2010 Tartalomjegyzék: Egyenes x változik Egyenes y változik Egyenes y és x változik Kör Sík z változik Sík y, x és z
Regresszió számítás GeoEasy V2.05+ Geodéziai Kommunikációs Program DigiKom Kft. 2006-2010 Tartalomjegyzék: Egyenes x változik Egyenes y változik Egyenes y és x változik Kör Sík z változik Sík y, x és z
A LÉGKÖRBEN HATÓ ERŐK, EGYENSÚLYI MOZGÁSOK A LÉGKÖRBEN
 A LÉGKÖRBEN HATÓ ERŐK, EGYENSÚLYI MOZGÁSOK A LÉGKÖRBEN Egy testre ható erő, a más testekkel való kölcsönhatás mértékére jellemző fizikai mennyiség. A légkörben ható erők Külső erők: A Föld tömegéből következő
A LÉGKÖRBEN HATÓ ERŐK, EGYENSÚLYI MOZGÁSOK A LÉGKÖRBEN Egy testre ható erő, a más testekkel való kölcsönhatás mértékére jellemző fizikai mennyiség. A légkörben ható erők Külső erők: A Föld tömegéből következő
x = cos αx sin αy y = sin αx + cos αy 2. Mi a X/Y/Z tengely körüli forgatás transzformációs mátrixa 3D-ben?
 . Mi az (x, y) koordinátákkal megadott pont elforgatás uténi két koordinátája, ha α szöggel forgatunk az origó körül? x = cos αx sin αy y = sin αx + cos αy 2. Mi a X/Y/Z tengely körüli forgatás transzformációs
. Mi az (x, y) koordinátákkal megadott pont elforgatás uténi két koordinátája, ha α szöggel forgatunk az origó körül? x = cos αx sin αy y = sin αx + cos αy 2. Mi a X/Y/Z tengely körüli forgatás transzformációs
Bevezetés a geodéziába
 Bevezetés a geodéziába 1 Geodézia Definíció: a földmérés a Föld alakjának és méreteinek, a Föld fizikai felszínén, ill. a felszín alatt lévő természetes és mesterséges alakzatok geometriai méreteinek és
Bevezetés a geodéziába 1 Geodézia Definíció: a földmérés a Föld alakjának és méreteinek, a Föld fizikai felszínén, ill. a felszín alatt lévő természetes és mesterséges alakzatok geometriai méreteinek és
Bevezetés a méréstechinkába, és jelfeldologzásba jegyzőkönyv
 Bevezetés a méréstechinkába, és jelfeldologzásba jegyzőkönyv Lódi Péter(D1WBA1) Módli Hunor(HHW6Q9) 2015 Április 15. Mérés helye: Mérés ideje: Mérés tárgya: Mérés eszköze: PPKE-ITK 3. emeleti 321-es Mérőlabor,
Bevezetés a méréstechinkába, és jelfeldologzásba jegyzőkönyv Lódi Péter(D1WBA1) Módli Hunor(HHW6Q9) 2015 Április 15. Mérés helye: Mérés ideje: Mérés tárgya: Mérés eszköze: PPKE-ITK 3. emeleti 321-es Mérőlabor,
Hegyi Ádám István ELTE, április 25.
 Hegyi Ádám István ELTE, 2012. április 25. GPS = Global Positioning System Department of Defense = Amerikai Egyesült Államok Védelmi Minisztériuma 1973 DNSS = Defense Navigation Satellite System vagy Navstar-GPS
Hegyi Ádám István ELTE, 2012. április 25. GPS = Global Positioning System Department of Defense = Amerikai Egyesült Államok Védelmi Minisztériuma 1973 DNSS = Defense Navigation Satellite System vagy Navstar-GPS
INFORMATIKA ÁGAZATI ALKALMAZÁSAI. Az Agrármérnöki MSc szak tananyagfejlesztése TÁMOP /1/A
 INFORMATIKA ÁGAZATI ALKALMAZÁSAI Az Agrármérnöki MSc szak tananyagfejlesztése TÁMOP-4.1.2-08/1/A-2009-0010 11. Globális helymeghatározás pontosító rendszerei Pontosságot befolyásoló tényezők Differenciális
INFORMATIKA ÁGAZATI ALKALMAZÁSAI Az Agrármérnöki MSc szak tananyagfejlesztése TÁMOP-4.1.2-08/1/A-2009-0010 11. Globális helymeghatározás pontosító rendszerei Pontosságot befolyásoló tényezők Differenciális
Pálya : Az a vonal, amelyen a mozgó test végighalad. Út: A pályának az a része, amelyet adott idő alatt a mozgó tárgy megtesz.
 Haladó mozgások A hely és a mozgás viszonylagos. A testek helyét, mozgását valamilyen vonatkoztatási ponthoz, vonatkoztatási rendszerhez képest adjuk meg, ahhoz viszonyítjuk. pl. A vonatban utazó ember
Haladó mozgások A hely és a mozgás viszonylagos. A testek helyét, mozgását valamilyen vonatkoztatási ponthoz, vonatkoztatási rendszerhez képest adjuk meg, ahhoz viszonyítjuk. pl. A vonatban utazó ember
INFORMATIKA ÁGAZATI ALKALMAZÁSAI. Az Agrármérnöki MSc szak tananyagfejlesztése TÁMOP-4.1.2-08/1/A-2009-0010
 INFORMATIKA ÁGAZATI ALKALMAZÁSAI Az Agrármérnöki MSc szak tananyagfejlesztése TÁMOP-4.1.2-08/1/A-2009-0010 10. GPS, GPRS (mobilkommunikációs) ismeretek Helymeghatározás GPS rendszer alapelve GNSS rendszerek
INFORMATIKA ÁGAZATI ALKALMAZÁSAI Az Agrármérnöki MSc szak tananyagfejlesztése TÁMOP-4.1.2-08/1/A-2009-0010 10. GPS, GPRS (mobilkommunikációs) ismeretek Helymeghatározás GPS rendszer alapelve GNSS rendszerek
Átszámítások különböző alapfelületek koordinátái között
 Átszámítások különböző alapfelületek koordinátái között A különböző időpontokban, különböző körülmények között rögzített pontok földi koordinátái különböző alapfelületekre (ellipszoidokra geodéziai dátumokra)
Átszámítások különböző alapfelületek koordinátái között A különböző időpontokban, különböző körülmények között rögzített pontok földi koordinátái különböző alapfelületekre (ellipszoidokra geodéziai dátumokra)
LOCATION BASED SERVICES
 LOCATION BASED SERVICES Budapesti Műszaki és Gazdaságtudományi Egyetem Közlekedésüzemi és Közlekedésgazdasági Tanszék Közlekedési Áramlatok Esztergár-Kiss Domokos esztergar@mail.bme.hu Tartalom TARTALOM
LOCATION BASED SERVICES Budapesti Műszaki és Gazdaságtudományi Egyetem Közlekedésüzemi és Közlekedésgazdasági Tanszék Közlekedési Áramlatok Esztergár-Kiss Domokos esztergar@mail.bme.hu Tartalom TARTALOM
Alapfokú barlangjáró tanfolyam
 Tájékozódási ismeretek, barlangtérképezés Ország János Szegedi Karszt- és Barlangkutató Egyesület Alapfokú barlangjáró tanfolyam Orfű Tájékozódás felszínen: Térképek segítségével GPS koordinátákkal
Tájékozódási ismeretek, barlangtérképezés Ország János Szegedi Karszt- és Barlangkutató Egyesület Alapfokú barlangjáró tanfolyam Orfű Tájékozódás felszínen: Térképek segítségével GPS koordinátákkal
Robotika. Relatív helymeghatározás Odometria
 Robotika Relatív helymeghatározás Odometria Differenciális hajtás c m =πd n /nc e c m D n C e n = hány mm-t tesz meg a robot egy jeladó impulzusra = névleges kerék átmérő = jeladó fölbontása (impulzus/ford.)
Robotika Relatív helymeghatározás Odometria Differenciális hajtás c m =πd n /nc e c m D n C e n = hány mm-t tesz meg a robot egy jeladó impulzusra = névleges kerék átmérő = jeladó fölbontása (impulzus/ford.)
FÖLDMÉRÉS ISMERETEK EMELT SZINTŰ ÍRÁSBELI VIZSGA JAVÍTÁSI-ÉRTÉKELÉSI ÚTMUTATÓ A MINTAFELADATOKHOZ
 FÖLDMÉRÉS ISMERETEK EMELT SZINTŰ ÍRÁSBELI VIZSGA JAVÍTÁSI-ÉRTÉKELÉSI ÚTMUTATÓ A MINTAFELADATOKHOZ 1 / 6 feladatlap Elméleti szöveges feladatok 1. Egészítse ki az alábbi szöveget a Glonassz GNSS alaprendszerrel
FÖLDMÉRÉS ISMERETEK EMELT SZINTŰ ÍRÁSBELI VIZSGA JAVÍTÁSI-ÉRTÉKELÉSI ÚTMUTATÓ A MINTAFELADATOKHOZ 1 / 6 feladatlap Elméleti szöveges feladatok 1. Egészítse ki az alábbi szöveget a Glonassz GNSS alaprendszerrel
Esri Arcpad 7.0.1. Utó- feldolgozás. Oktatási anyag - utókorrekció
 Esri Arcpad 7.0.1 & MobileMapper CE Utó- feldolgozás Oktatási anyag - utókorrekció Tartalomjegyzék GPS- MÉRÉSEK UTÓ- FELDOLGOZÁSA... 3 1.1 MŰHOLD ADATOK GYŰJTÉSÉNEK ELINDÍTÁSA, A ESRI ArcPad PROGRAMMAL
Esri Arcpad 7.0.1 & MobileMapper CE Utó- feldolgozás Oktatási anyag - utókorrekció Tartalomjegyzék GPS- MÉRÉSEK UTÓ- FELDOLGOZÁSA... 3 1.1 MŰHOLD ADATOK GYŰJTÉSÉNEK ELINDÍTÁSA, A ESRI ArcPad PROGRAMMAL
17. előadás: Vektorok a térben
 17. előadás: Vektorok a térben Szabó Szilárd A vektor fogalma A mai előadásban n 1 tetszőleges egész szám lehet, de az egyszerűség kedvéért a képletek az n = 2 esetben szerepelnek. Vektorok: rendezett
17. előadás: Vektorok a térben Szabó Szilárd A vektor fogalma A mai előadásban n 1 tetszőleges egész szám lehet, de az egyszerűség kedvéért a képletek az n = 2 esetben szerepelnek. Vektorok: rendezett
A VÁROSI HŐSZIGET VIZSGÁLATA MODIS ÉS ASTER MÉRÉSEK FELHASZNÁLÁSÁVAL
 35. Meteorológiai Tudományos Napok, Magyar Tudományos Akadémia, 2009. november 20. A VÁROSI HŐSZIGET VIZSGÁLATA MODIS ÉS ASTER MÉRÉSEK FELHASZNÁLÁSÁVAL Dezső Zsuzsanna, Bartholy Judit, Pongrácz Rita Eötvös
35. Meteorológiai Tudományos Napok, Magyar Tudományos Akadémia, 2009. november 20. A VÁROSI HŐSZIGET VIZSGÁLATA MODIS ÉS ASTER MÉRÉSEK FELHASZNÁLÁSÁVAL Dezső Zsuzsanna, Bartholy Judit, Pongrácz Rita Eötvös
A térképen ábrázolt vonal: - sík felület egyenese? - sík felület görbéje? - görbült felület egyenese ( geodetikus )? - görbült felület görbéje?
? - görbült felület görbéje?") Előzetes megjegyzés: 1. Az időt nyugodtan mérhetjük méterben. ct [s ] = t [m ] A film kétórás volt. = A film 2.16 milliárd kilométernyi ideig tartott. 2. A tömeget is nyugodtan mérhetjük méterben! GM [kg]
Előzetes megjegyzés: 1. Az időt nyugodtan mérhetjük méterben. ct [s ] = t [m ] A film kétórás volt. = A film 2.16 milliárd kilométernyi ideig tartott. 2. A tömeget is nyugodtan mérhetjük méterben! GM [kg]
A térképen ábrázolt vonal: - sík felület egyenese? - sík felület görbéje? - görbült felület egyenese ( geodetikus )? - görbült felület görbéje?
? - görbült felület görbéje?") Előzetes megjegyzés: 1. Az időt nyugodtan mérhetjük méterben. ct [s ] = t [m ] A film kétórás volt. = A film 2.16 milliárd kilométernyi ideig tartott. 2. A tömeget is nyugodtan mérhetjük méterben! GM [kg]
Előzetes megjegyzés: 1. Az időt nyugodtan mérhetjük méterben. ct [s ] = t [m ] A film kétórás volt. = A film 2.16 milliárd kilométernyi ideig tartott. 2. A tömeget is nyugodtan mérhetjük méterben! GM [kg]
Transzformációk. Grafikus játékok fejlesztése Szécsi László 2013.02.26. t05-transform
 Transzformációk Grafikus játékok fejlesztése Szécsi László 2013.02.26. t05-transform Koordinátarendszerek: modelltér Koordinátarendszerek: világtér Koordinátarendszerek: kameratér up right z eye ahead
Transzformációk Grafikus játékok fejlesztése Szécsi László 2013.02.26. t05-transform Koordinátarendszerek: modelltér Koordinátarendszerek: világtér Koordinátarendszerek: kameratér up right z eye ahead
Haladó mozgások A hely és a mozgás viszonylagos. A testek helyét, mozgását valamilyen vonatkoztatási ponthoz, vonatkoztatási rendszerhez képest adjuk
 Haladó mozgások A hely és a mozgás viszonylagos. A testek helyét, mozgását valamilyen vonatkoztatási ponthoz, vonatkoztatási rendszerhez képest adjuk meg, ahhoz viszonyítjuk. pl. A vonatban utazó ember
Haladó mozgások A hely és a mozgás viszonylagos. A testek helyét, mozgását valamilyen vonatkoztatási ponthoz, vonatkoztatási rendszerhez képest adjuk meg, ahhoz viszonyítjuk. pl. A vonatban utazó ember
Térképészeti alapismeretek. Mit jelent egy térkép léptéke?
 Térképészeti alapismeretek Mi a térkép? A föld felszínén illetve azzal kapcsolatban álló anyagi vagy elvont dolgoknak általában kicsinyített, generalizált, síkbeli megjelenítése. Térképészeti absztrakció
Térképészeti alapismeretek Mi a térkép? A föld felszínén illetve azzal kapcsolatban álló anyagi vagy elvont dolgoknak általában kicsinyített, generalizált, síkbeli megjelenítése. Térképészeti absztrakció
5. előadás: Földi vonatkoztatási rendszerek
 5. előadás: Földi vonatkoztatási rendszerek 5. előadás: Földi vonatkoztatási rendszerek A Nemzetközi Földi Vonatkoztatási Rendszer A csillagászati geodézia története során egészen a XX. század kezdetéig
5. előadás: Földi vonatkoztatási rendszerek 5. előadás: Földi vonatkoztatási rendszerek A Nemzetközi Földi Vonatkoztatási Rendszer A csillagászati geodézia története során egészen a XX. század kezdetéig
Műholdas és modell által szimulált globális ózon idősorok korrelációs tulajdonságai
 Műholdas és modell által szimulált globális ózon idősorok korrelációs tulajdonságai Homonnai Viktória II. éves PhD hallgató Témavezető: Dr. Jánosi Imre ELTE TTK, Komplex Rendszerek Fizikája Tanszék Bevezetés
Műholdas és modell által szimulált globális ózon idősorok korrelációs tulajdonságai Homonnai Viktória II. éves PhD hallgató Témavezető: Dr. Jánosi Imre ELTE TTK, Komplex Rendszerek Fizikája Tanszék Bevezetés
A loxodrómáról. Előző írásunkban melynek címe: A Gudermann - függvényről szó esett a Mercator - vetületről,illetve az ezen alapuló térképről 1. ábra.
 1 A loxodrómáról Előző írásunkban melynek címe: A Gudermann - függvényről szó esett a Mercator - vetületről,illetve az ezen alapuló térképről 1. ábra. 1. ábra forrása: [ 1 ] Ezen a térképen a szélességi
1 A loxodrómáról Előző írásunkban melynek címe: A Gudermann - függvényről szó esett a Mercator - vetületről,illetve az ezen alapuló térképről 1. ábra. 1. ábra forrása: [ 1 ] Ezen a térképen a szélességi
INFORMATIKA ÁGAZATI ALKALMAZÁSAI. Az Agrármérnöki MSc szak tananyagfejlesztése TÁMOP-4.1.2-08/1/A-2009-0010
 INFORMATIKA ÁGAZATI ALKALMAZÁSAI Az Agrármérnöki MSc szak tananyagfejlesztése TÁMOP-4.1.2-08/1/A-2009-0010 13. GNSS mérés tervezése, végrehajtása Tervezés célja, eszközei, almanach GNSS tervező szoftverek
INFORMATIKA ÁGAZATI ALKALMAZÁSAI Az Agrármérnöki MSc szak tananyagfejlesztése TÁMOP-4.1.2-08/1/A-2009-0010 13. GNSS mérés tervezése, végrehajtása Tervezés célja, eszközei, almanach GNSS tervező szoftverek
A GPS pozíciók pontosításának lehetőségei
 A GPS pozíciók pontosításának lehetőségei GIS OPEN 2005 Bartha Csaba csaba.bartha@geopro.hu Milyen fogalmakkal találkozunk? VRS GPS FKP EGNOS DGPS RTCM OGPSH GLONASS WAAS RTK STATIKUS GSM KINEMATIKUS URH
A GPS pozíciók pontosításának lehetőségei GIS OPEN 2005 Bartha Csaba csaba.bartha@geopro.hu Milyen fogalmakkal találkozunk? VRS GPS FKP EGNOS DGPS RTCM OGPSH GLONASS WAAS RTK STATIKUS GSM KINEMATIKUS URH
Helymeghatározás. Balogh András BME-HIT
 Helymeghatározás Balogh András BME-HIT Pozícióbecslési metodikák Abszolút módszerek Háromszögelés Trilateráció Multilateráció Ujjlenyomat-módszer Közelség-alapú Relatív becslések Elmozdulás iránya és nagysága
Helymeghatározás Balogh András BME-HIT Pozícióbecslési metodikák Abszolút módszerek Háromszögelés Trilateráció Multilateráció Ujjlenyomat-módszer Közelség-alapú Relatív becslések Elmozdulás iránya és nagysága
EGYSZERŰSÍTETT BESUGÁRZÁSI TERVKÉSZÍTÉSI ÉS TERVELLENŐRZÉSI KÖVETELMÉNYEK
 EGYSZERŰSÍTETT BESUGÁRZÁSI TERVKÉSZÍTÉSI ÉS TERVELLENŐRZÉSI KÖVETELMÉNYEK HELYI DIGITÁLIS TELEVÍZIÓ ADÓÁLLOMÁSOK BESUGÁRZÁSI TERVÉHEZ BEVEZETÉS Ezen előírás az analóg rádióengedéllyel rendelkező helyi
EGYSZERŰSÍTETT BESUGÁRZÁSI TERVKÉSZÍTÉSI ÉS TERVELLENŐRZÉSI KÖVETELMÉNYEK HELYI DIGITÁLIS TELEVÍZIÓ ADÓÁLLOMÁSOK BESUGÁRZÁSI TERVÉHEZ BEVEZETÉS Ezen előírás az analóg rádióengedéllyel rendelkező helyi
MŰHOLDAS VÁROSI HŐSZIGET VIZSGÁLAT
 Városi Hősziget Konferencia Országos Meteorológiai Szolgálat 2013. szeptember 24. MŰHOLDAS VÁROSI HŐSZIGET VIZSGÁLAT Dezső Zsuzsanna, Bartholy Judit, Pongrácz Rita Eötvös Loránd Tudományegyetem Meteorológiai
Városi Hősziget Konferencia Országos Meteorológiai Szolgálat 2013. szeptember 24. MŰHOLDAS VÁROSI HŐSZIGET VIZSGÁLAT Dezső Zsuzsanna, Bartholy Judit, Pongrácz Rita Eötvös Loránd Tudományegyetem Meteorológiai
METEOROLÓGIAI MÉRÉSEK és MEGFIGYELÉSEK
 METEOROLÓGIAI MÉRÉSEK és MEGFIGYELÉSEK Földtudomány BSc Mészáros Róbert Eötvös Loránd Tudományegyetem Meteorológiai Tanszék MIÉRT MÉRÜNK? A meteorológiai mérések célja: 1. A légkör pillanatnyi állapotának
METEOROLÓGIAI MÉRÉSEK és MEGFIGYELÉSEK Földtudomány BSc Mészáros Róbert Eötvös Loránd Tudományegyetem Meteorológiai Tanszék MIÉRT MÉRÜNK? A meteorológiai mérések célja: 1. A légkör pillanatnyi állapotának
Lengyelné Dr. Szilágyi Szilvia április 7.
 ME, Anaĺızis Tanszék 2010. április 7. , alapfogalmak 2.1. Definíció A H 1, H 2,..., H n R (ahol n 2 egész szám) nemüres valós számhalmazok H 1 H 2... H n Descartes-szorzatán a következő halmazt értjük:
ME, Anaĺızis Tanszék 2010. április 7. , alapfogalmak 2.1. Definíció A H 1, H 2,..., H n R (ahol n 2 egész szám) nemüres valós számhalmazok H 1 H 2... H n Descartes-szorzatán a következő halmazt értjük:
AZ INFORMÁCIÓS TÁRSADALOM TECHNOLÓGIAI TÁVLATAI. Detrekői Ákos a Nemzeti Hírközlési és Informatikai Tanács elnöke Székesfehérvár,
 AZ INFORMÁCIÓS TÁRSADALOM TECHNOLÓGIAI TÁVLATAI Detrekői Ákos a Nemzeti Hírközlési és Informatikai Tanács elnöke Székesfehérvár, 2010.03.17. TARTALOMJEGYZÉK 1. Bevezetés 2. Az Információs Társadalom Technológiai
AZ INFORMÁCIÓS TÁRSADALOM TECHNOLÓGIAI TÁVLATAI Detrekői Ákos a Nemzeti Hírközlési és Informatikai Tanács elnöke Székesfehérvár, 2010.03.17. TARTALOMJEGYZÉK 1. Bevezetés 2. Az Információs Társadalom Technológiai
Kinematika szeptember Vonatkoztatási rendszerek, koordinátarendszerek
 Kinematika 2014. szeptember 28. 1. Vonatkoztatási rendszerek, koordinátarendszerek 1.1. Vonatkoztatási rendszerek A test mozgásának leírása kezdetén ki kell választani azt a viszonyítási rendszert, amelyből
Kinematika 2014. szeptember 28. 1. Vonatkoztatási rendszerek, koordinátarendszerek 1.1. Vonatkoztatási rendszerek A test mozgásának leírása kezdetén ki kell választani azt a viszonyítási rendszert, amelyből
A LÉGKÖRBEN HATÓ ERŐK, EGYENSÚLYI MOZGÁSOK A LÉGKÖRBEN
 A LÉGKÖRBEN HATÓ ERŐK, EGYENSÚLYI MOZGÁSOK A LÉGKÖRBEN Egy testre ható erő, a más testekkel való kölcsönhatás mértékére jellemző fizikai mennyiség. A légkörben ható erők Külső erők: A Föld tömegéből következő
A LÉGKÖRBEN HATÓ ERŐK, EGYENSÚLYI MOZGÁSOK A LÉGKÖRBEN Egy testre ható erő, a más testekkel való kölcsönhatás mértékére jellemző fizikai mennyiség. A légkörben ható erők Külső erők: A Föld tömegéből következő
Csillagászati földrajzzal. Megoldási útmutatókkal
 Csillagászati földrajzzal kapcsolatos feladatok Megoldási útmutatókkal A Nap delelési magasságának kiszámítása Feladat: Hány fokos szögben látják delelni a Napot június 22-én a következő szélességi körökön?
Csillagászati földrajzzal kapcsolatos feladatok Megoldási útmutatókkal A Nap delelési magasságának kiszámítása Feladat: Hány fokos szögben látják delelni a Napot június 22-én a következő szélességi körökön?
3. Vetülettan (3/3-5.) Unger szeged.hu/eghajlattan SZTE Éghajlattani és Tájföldrajzi Tanszék
 Unger szeged.hu/eghajlattan SZTE Éghajlattani és Tájföldrajzi Tanszék") Kartográfia (GBN309E) Térképészet (GBN317E) előadás 3. Vetülettan (3/3-5.) Unger János unger@geo.u @geo.u-szeged.hu www.sci.u-szeged.hu/eghajlattan szeged.hu/eghajlattan SZTE Éghajlattani és Tájföldrajzi
Kartográfia (GBN309E) Térképészet (GBN317E) előadás 3. Vetülettan (3/3-5.) Unger János unger@geo.u @geo.u-szeged.hu www.sci.u-szeged.hu/eghajlattan szeged.hu/eghajlattan SZTE Éghajlattani és Tájföldrajzi
Szádfal szerkezet tervezés Adatbev.
 Szádfal szerkezet tervezés Adatbev. Projekt Dátum : 0..005 Beállítások (bevitel az aktuális feladathoz) Nyomás számítás Aktív földnyomás számítás : Passzív földnyomás számítás : Földrengés számítás : Ellenőrzési
Szádfal szerkezet tervezés Adatbev. Projekt Dátum : 0..005 Beállítások (bevitel az aktuális feladathoz) Nyomás számítás Aktív földnyomás számítás : Passzív földnyomás számítás : Földrengés számítás : Ellenőrzési
TestLine - nummulites_gnss Minta feladatsor
 1.* Egy műholdas helymeghatározás lehet egyszerre abszolút és kinematikus. 2.* műholdak pillanatnyi helyzetéből és a megmért távolságokból számítható a vevő pozíciója. 3.* 0:55 Nehéz kinai BEIDOU, az amerikai
1.* Egy műholdas helymeghatározás lehet egyszerre abszolút és kinematikus. 2.* műholdak pillanatnyi helyzetéből és a megmért távolságokból számítható a vevő pozíciója. 3.* 0:55 Nehéz kinai BEIDOU, az amerikai
A jogszabályi változások és a hazai infrastruktúrában történt fejlesztések hatása a GNSS mérésekre
 A jogszabályi változások és a hazai infrastruktúrában történt fejlesztések hatása a GNSS mérésekre Braunmüller Péter Galambos István MFTTT 29. Vándorgyűlés, Sopron 2013. Július 11. Földmérési és Távérzékelési
A jogszabályi változások és a hazai infrastruktúrában történt fejlesztések hatása a GNSS mérésekre Braunmüller Péter Galambos István MFTTT 29. Vándorgyűlés, Sopron 2013. Július 11. Földmérési és Távérzékelési
Gépi tanulás és Mintafelismerés
 Gépi tanulás és Mintafelismerés jegyzet Csató Lehel Matematika-Informatika Tanszék BabesBolyai Tudományegyetem, Kolozsvár 2007 Aug. 20 2 1. fejezet Bevezet A mesterséges intelligencia azon módszereit,
Gépi tanulás és Mintafelismerés jegyzet Csató Lehel Matematika-Informatika Tanszék BabesBolyai Tudományegyetem, Kolozsvár 2007 Aug. 20 2 1. fejezet Bevezet A mesterséges intelligencia azon módszereit,
Pálya : Az a vonal, amelyen a mozgó test végighalad. Út: A pályának az a része, amelyet adott idő alatt a mozgó tárgy megtesz.
 Haladó mozgások A hely és a mozgás viszonylagos. A testek helyét, mozgását valamilyen vonatkoztatási ponthoz, vonatkoztatási rendszerhez képest adjuk meg, ahhoz viszonyítjuk. pl. A vonatban utazó ember
Haladó mozgások A hely és a mozgás viszonylagos. A testek helyét, mozgását valamilyen vonatkoztatási ponthoz, vonatkoztatási rendszerhez képest adjuk meg, ahhoz viszonyítjuk. pl. A vonatban utazó ember
1. ábra Modell tér I.
 1 Veres György Átbocsátó képesség vizsgálata számítógépes modell segítségével A kiürítés szimuláló számítógépes modellek egyes apró, de igen fontos részletek vizsgálatára is felhasználhatóak. Az átbocsátóképesség
1 Veres György Átbocsátó képesség vizsgálata számítógépes modell segítségével A kiürítés szimuláló számítógépes modellek egyes apró, de igen fontos részletek vizsgálatára is felhasználhatóak. Az átbocsátóképesség
Térképismeret ELTE TTK BSc. 2007 11. Terepi adatgyűjt. ció. (Kartográfiai informáci GPS-adatgy. tematikus térkt gia) http://lazarus.elte.
 http://lazarus.elte.") Térképismeret ELTE TTK Földtudományi és s Földrajz F BSc. 2007 11. Török k Zsolt, Draskovits Zsuzsa ELTE IK TérkT rképtudományi és Geoinformatikai Tanszék http://lazarus.elte.hu Terepi adatgyűjt jtés s
Térképismeret ELTE TTK Földtudományi és s Földrajz F BSc. 2007 11. Török k Zsolt, Draskovits Zsuzsa ELTE IK TérkT rképtudományi és Geoinformatikai Tanszék http://lazarus.elte.hu Terepi adatgyűjt jtés s
Érettségi feladatok Koordinátageometria_rendszerezve / 5
 Érettségi feladatok Koordinátageometria_rendszerezve 2005-2013 1/ 5 Vektorok 2005. május 28./12. Adottak az a (4; 3) és b ( 2; 1) vektorok. a) Adja meg az a hosszát! b) Számítsa ki az a + b koordinátáit!
Érettségi feladatok Koordinátageometria_rendszerezve 2005-2013 1/ 5 Vektorok 2005. május 28./12. Adottak az a (4; 3) és b ( 2; 1) vektorok. a) Adja meg az a hosszát! b) Számítsa ki az a + b koordinátáit!
(térképi ábrázolás) Az egész térképre érvényes meghatározása: Definíció
 Az egész térképre érvényes meghatározása: Definíció") Az egész térképre érvényes meghatározása: A térkép hossztartó vonalain mért távolságnak és a valódi redukált vízszintes távolságnak a hányadosa. M = 1 / m, vagy M = 1 : m (m=méretarányszám) A méretarány
Az egész térképre érvényes meghatározása: A térkép hossztartó vonalain mért távolságnak és a valódi redukált vízszintes távolságnak a hányadosa. M = 1 / m, vagy M = 1 : m (m=méretarányszám) A méretarány
Számítógépes Grafika mintafeladatok
 Számítógépes Grafika mintafeladatok Feladat: Forgassunk a 3D-s pontokat 45 fokkal a X tengely körül, majd nyújtsuk az eredményt minden koordinátájában kétszeresére az origóhoz képest, utána forgassunk
Számítógépes Grafika mintafeladatok Feladat: Forgassunk a 3D-s pontokat 45 fokkal a X tengely körül, majd nyújtsuk az eredményt minden koordinátájában kétszeresére az origóhoz képest, utána forgassunk
3. Fészekmélység. I 0 I k = 3 log(d k / h) + 3 log(e) (D k h) (3.1)
 + 3 log(e) (D k h) (3.1)") 3. Fészekmélység A földrengés katalógus 28 földrengése közül csupán 3751 rengésnek - az adatállomány 18%-nak ismerjük a fészekmélységét. Az adatbázisban egyaránt található műszeres megfigyelésekből számított
3. Fészekmélység A földrengés katalógus 28 földrengése közül csupán 3751 rengésnek - az adatállomány 18%-nak ismerjük a fészekmélységét. Az adatbázisban egyaránt található műszeres megfigyelésekből számított
 FELADATOK A DINAMIKUS METEOROLÓGIÁBÓL 1. A 2 m-es szinten végzett standard meteorológiai mérések szerint a Földön valaha mért második legmagasabb hőmérséklet 57,8 C. Ezt San Luis-ban (Mexikó) 1933 augusztus
FELADATOK A DINAMIKUS METEOROLÓGIÁBÓL 1. A 2 m-es szinten végzett standard meteorológiai mérések szerint a Földön valaha mért második legmagasabb hőmérséklet 57,8 C. Ezt San Luis-ban (Mexikó) 1933 augusztus
3. Vetülettan (3/6., 8., 10.) Unger János. @geo.u-szeged.hu www.sci.u-szeged.hu/eghajlattan
 Unger János. @geo.u-szeged.hu www.sci.u-szeged.hu/eghajlattan") Kartográfia (GBN309E) Térképészet (GBN317E) előadás 3. Vetülettan (3/6., 8., 10.) Unger János unger@geo.u @geo.u-szeged.hu www.sci.u-szeged.hu/eghajlattan szeged.hu/eghajlattan SZTE Éghajlattani és Tájföldrajzi
Kartográfia (GBN309E) Térképészet (GBN317E) előadás 3. Vetülettan (3/6., 8., 10.) Unger János unger@geo.u @geo.u-szeged.hu www.sci.u-szeged.hu/eghajlattan szeged.hu/eghajlattan SZTE Éghajlattani és Tájföldrajzi
7. Koordináta méréstechnika
 7. Koordináta méréstechnika Coordinate Measuring Machine: CMM, 3D-s mérőgép Egyiptomi piramis kövek mérése i.e. 1440 Egyiptomi mérővonalzó, Amenphotep fáraó (i.e. 1550) alkarjának hossza: 524mm A koordináta
7. Koordináta méréstechnika Coordinate Measuring Machine: CMM, 3D-s mérőgép Egyiptomi piramis kövek mérése i.e. 1440 Egyiptomi mérővonalzó, Amenphotep fáraó (i.e. 1550) alkarjának hossza: 524mm A koordináta
Infokommunikáció a közlekedésben (VITMJV27)
") Infokommunikáció a közlekedésben (VITMJV27) Közlekedési információs rendszerek Vidács Attila Távközlési és Médiainformatikai Tsz. I.E.348, T:19-25, vidacs@tmit.bme.hu Tartalom Intelligens közlekedési rendszerek
Infokommunikáció a közlekedésben (VITMJV27) Közlekedési információs rendszerek Vidács Attila Távközlési és Médiainformatikai Tsz. I.E.348, T:19-25, vidacs@tmit.bme.hu Tartalom Intelligens közlekedési rendszerek
A regionális gazdasági fejlődés műszaki - innovációs hátterének fejlesztése
 A regionális gazdasági fejlődés műszaki - innovációs hátterének fejlesztése TÁMOP- 4.2.1/B-09/1/KONV-2010-0006 Energetika, környezetvédelem alprojekt Fókuszáló napkollektor fejlesztése Divós Ferenc, Németh
A regionális gazdasági fejlődés műszaki - innovációs hátterének fejlesztése TÁMOP- 4.2.1/B-09/1/KONV-2010-0006 Energetika, környezetvédelem alprojekt Fókuszáló napkollektor fejlesztése Divós Ferenc, Németh
KUTATÁSI JELENTÉS. Multilaterációs radarrendszer kutatása. Szüllő Ádám
 KUTATÁSI JELENTÉS Multilaterációs radarrendszer kutatása Szüllő Ádám 212 Bevezetés A Mikrohullámú Távérzékelés Laboratórium jelenlegi K+F tevékenységei közül ezen jelentés a multilaterációs radarrendszerek
KUTATÁSI JELENTÉS Multilaterációs radarrendszer kutatása Szüllő Ádám 212 Bevezetés A Mikrohullámú Távérzékelés Laboratórium jelenlegi K+F tevékenységei közül ezen jelentés a multilaterációs radarrendszerek
Babeș Bólyai Tudományegyetem Informatika kar Műholdas helymeghatározás a GPS rendszerrel
 Babeș Bólyai Tudományegyetem Informatika kar Műholdas helymeghatározás a GPS rendszerrel Szűcs Attila Levente Kolozsvár, 2010 Április 29. 1. Bevezető A GPS az angol Global Positioning System megnevezés
Babeș Bólyai Tudományegyetem Informatika kar Műholdas helymeghatározás a GPS rendszerrel Szűcs Attila Levente Kolozsvár, 2010 Április 29. 1. Bevezető A GPS az angol Global Positioning System megnevezés
Térinformatikai DGPS NTRIP vétel és feldolgozás
 Térinformatikai DGPS NTRIP vétel és feldolgozás Méréseinkhez a Thales Mobile Mapper CE térinformatikai GPS vevıt használtunk. A mérést a Szegedi Tudományegyetem Egyetem utcai épületének tetején található
Térinformatikai DGPS NTRIP vétel és feldolgozás Méréseinkhez a Thales Mobile Mapper CE térinformatikai GPS vevıt használtunk. A mérést a Szegedi Tudományegyetem Egyetem utcai épületének tetején található
A HÁLÓZATELLENŐRZÉS ÚJ KONCEPCIÓJA AZ NKM HÁLÓZATÁBAN. Varga Tamás, hálózati üzemvezető NKM Földgázhálózati Kft
 A HÁLÓZATELLENŐRZÉS ÚJ KONCEPCIÓJA AZ NKM HÁLÓZATÁBAN Varga Tamás, hálózati üzemvezető NKM Földgázhálózati Kft. 2018.04.20. NKM Földgázhálózati Kft. Hálózatellenőrzés számokban: Feladat. Hálózati szivárgás
A HÁLÓZATELLENŐRZÉS ÚJ KONCEPCIÓJA AZ NKM HÁLÓZATÁBAN Varga Tamás, hálózati üzemvezető NKM Földgázhálózati Kft. 2018.04.20. NKM Földgázhálózati Kft. Hálózatellenőrzés számokban: Feladat. Hálózati szivárgás
Ericsson CoordCom. Integrált segélyhíváskezelés, tevékenységirányítás. <Name> Kovács László
 Ericsson CoordCom Integrált segélyhíváskezelés, tevékenységirányítás Kovács László Ericsson Mo. ágazati igazgató Mobil: +36 30 9411 161 E-mail: laszlo.kovacs@ericsson.com 2009-04-09 1 Integrált
Ericsson CoordCom Integrált segélyhíváskezelés, tevékenységirányítás Kovács László Ericsson Mo. ágazati igazgató Mobil: +36 30 9411 161 E-mail: laszlo.kovacs@ericsson.com 2009-04-09 1 Integrált
Négycsuklós mechanizmus modelljének. Adams. elkészítése, kinematikai vizsgálata,
 A példa megnevezése: A példa száma: A példa szintje: Modellezõ rendszer: Kapcsolódó TÁMOP tananyag rész: A feladat rövid leírása: Négycsuklós mechanizmus modellezése SZIE-K2 alap közepes - haladó Adams
A példa megnevezése: A példa száma: A példa szintje: Modellezõ rendszer: Kapcsolódó TÁMOP tananyag rész: A feladat rövid leírása: Négycsuklós mechanizmus modellezése SZIE-K2 alap közepes - haladó Adams
Rallyinfo.hu - GPS rendszer működésének technikai leírása V1
 Rallyinfo.hu - GPS rendszer működésének technikai leírása V1 1. ábra: GPS doboz Méretei: 115x90x55mm Súlya: 340g + 2db csőbilincs 110g GPS mérés általános működési elve: A GPS egy fejlett helymeghatározó
Rallyinfo.hu - GPS rendszer működésének technikai leírása V1 1. ábra: GPS doboz Méretei: 115x90x55mm Súlya: 340g + 2db csőbilincs 110g GPS mérés általános működési elve: A GPS egy fejlett helymeghatározó
MIKROFYN GÉPVEZÉRLÉSEK. 2D megoldások:
 MIKROFYN GÉPVEZÉRLÉSEK Néhány szó a gyártóról: Az 1987-es kezdés óta a Mikrofyn A/S a világ öt legnagyobb precíziós lézer és gépvezérlés gyártója közé lépett. A profitot visszaforgatta az új termékek fejlesztésébe
MIKROFYN GÉPVEZÉRLÉSEK Néhány szó a gyártóról: Az 1987-es kezdés óta a Mikrofyn A/S a világ öt legnagyobb precíziós lézer és gépvezérlés gyártója közé lépett. A profitot visszaforgatta az új termékek fejlesztésébe
Érettségi feladatok: Trigonometria 1 /6
 Érettségi feladatok: Trigonometria 1 /6 2003. Próba 14. Egy hajó a Csendes-óceán egy szigetéről elindulva 40 perc alatt 24 km-t haladt észak felé, majd az eredeti haladási irányhoz képest 65 -ot nyugat
Érettségi feladatok: Trigonometria 1 /6 2003. Próba 14. Egy hajó a Csendes-óceán egy szigetéről elindulva 40 perc alatt 24 km-t haladt észak felé, majd az eredeti haladási irányhoz képest 65 -ot nyugat