Helymeghatározás. Balogh András BME-HIT
|
|
|
- Kinga Dudásné
- 7 évvel ezelőtt
- Látták:
Átírás



1 Helymeghatározás Balogh András BME-HIT
2 Pozícióbecslési metodikák Abszolút módszerek Háromszögelés Trilateráció Multilateráció Ujjlenyomat-módszer Közelség-alapú Relatív becslések Elmozdulás iránya és nagysága

3 Háromszögelés Háromszögelés Min. 2 db referenciapont: A és B Min. 2 db szög mérése: α és β


 A modern eszközök ezt már")
4 Háromszögelés Szögek közvetlen mérése: A geodézia (földmérés) módszere Az alkalmazott eszköz: teodolit Azimutális és elevációs szögeket mér Régebben analóg, manapság már digitális Az összetettebb eszközök egyúttal távolságot is mérnek Ez gyakorlatilag helyvektorokat eredményez A polárkoordinátákról a Descartes-féle rendszerbe való áttérés összefüggései ismertek Ez egy lokális koordináta-rendszer esetén nem is jelent problémát, globális esetben viszont annál inkább (vetületi rendszerek) A modern eszközök ezt már lekezelik
5 Háromszögelés Vetületi rendszerek: Magyarországon: 1975-ben egységesítették Egységes Országos Vetület (HD72/EOV) Ferdetengelyű, szögtartó, süllyesztett hengervetület Alapfelület: IUGG 67 ellipszoid X pozitív iránya északra, az Y keletre mutat Az X tengely a gellérthegyi alapponton áthaladó kezdő meridián vetített képe, az Y tengely az ország középső szélességi körén helyezkedik el A tengelyeket úgy tolták el, hogy az ország az első koordináta-negyedbe essen Beiktattak egy felcserélés elleni védelmet is Az ingatlan nyilvántartási és a polgári térképek ebben a rendszerben készülnek
6 Háromszögelés Vetületi rendszerek: Magyarországon: 1975-ben egységesítették Egységes Országos Vetület (HD72/EOV) Ferdetengelyű, szögtartó, süllyesztett hengervetület Alapfelület: IUGG 67 ellipszoid
 96 ellipszoid Ez határozza meg a tengerszint névleges magasságát 2017.11.06.")
7 Háromszögelés Vetületi rendszerek: A világon: 1984-ben egységesítették (NATO) World Geodetic System (WGS 84) A GPS referencia-rendszere Az origo a Föld tömegközéppontja Alapfelület: Earth Gravitational Model (EGM) 96 ellipszoid Ez határozza meg a tengerszint névleges magasságát
8 Háromszögelés Vetületi rendszerek: A világon: 1984-ben egységesítették (NATO) World Geodetic System (WGS 84) A GPS referencia-rendszere Az origo a Föld tömegközéppontja Alapfelület: Earth Gravitational Model (EGM) 96 ellipszoid Ez határozza meg a tengerszint névleges magasságát Gömbi koordináta rendszer (Latitude, Longitude, Altitude) IRP (IERS Reference Pole): Latitude = +90 IRM (IERS Reference Meridian): Longitude = 0» 5.3 szögperc (102 méter) keletre a Greenwich-től Két pont között a távolság a szögek függvénye (haversine):
 mérések:")


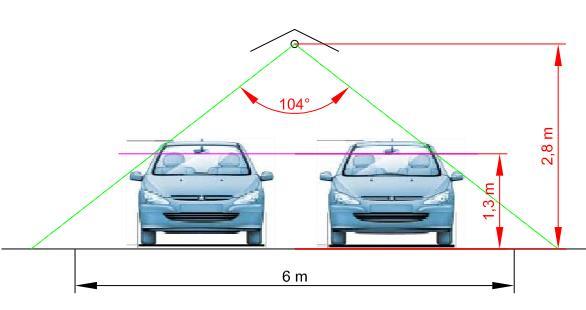
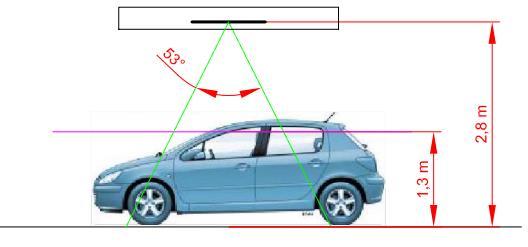
9 Háromszögelés Angle of Arrival (AoA) mérések: Radar-elv: Nyaláb iránya és szélessége Nyaláb forgatása Megvalósítás: Antennarendszer Mechanikus forgatás

10 Trilateráció Trilateráció Min. 3 db referenciapont Min. 3 db távolság mérése
 Vételi teljesítmény (RSSI) Adási és vételi jel teljesítményének különbsége Link Budget + csatornamodellek (fading) 2017.11.06.")
11 Trilateráció Távolságmérés Time of Arrival (ToA) Rádiós jel adása és vétele között eltelt idő Időszinkron az adó és a vevő között (Δt = 10ns Δd 3m) Vételi teljesítmény (RSSI) Adási és vételi jel teljesítményének különbsége Link Budget + csatornamodellek (fading)

12 Trilateráció Távolságmérés Vételi teljesítmény (RSSI) Jellemzően signed integer metrika Mit okoz 1 db (skála) hiba a távolságbecslések során? Szabadtéri terjedési modell: Hibaszámítással: Azaz az elérhető pontosság nem független a mérőponttól való távolságtól
 Min.")

13 Multilateráció Multilateráció (hiperbolikus) Min. 4 db referenciapont Távolságkülönbségek mérése
14 Multilateráció Távolságkülönbség-mérés Jellemzően időkülönbségek (TDoA) Time Difference of Arrival Az adó és vevő(k) között nincs szükség időszinkronra Megvalósítási módok: Referenciapontok általi sugárzás, vagy vétel Jelek (források) egymástól való elkülönítése Időben, frekvenciában, vagy kódolással Pl. keresztkorrelációval A vett jelek teljesítménykülönbségeivel is működik Azaz a távolságkülönbségek alapját bármilyen távolságbecslő metrika képezheti

15 Ujjlenyomat-módszer Fingerprinting Tanulási fázis: Előzetes mérések alapján az adott jellemző paraméter statisztikájának hozzárendelése a tér egy megadott pontjához Pozicionálási fázis: A megadott paraméter mérése, majd a mért adatokhoz legközelebb eső statisztika alapján a pozíció becslése
16 Ujjlenyomat-módszer Mintakeresés Jellemző paraméter Pl. Vételi teljesítmény, bit-hiba arány, terjedési idők, stb. Mérték: a távolsággal mutatott korreláció Az ujjlenyomatok célszerűen egyediek kellene legyenek A jellemző paraméter függvényében Osztályozó algoritmusok a legjobb pozíció becsléséhez Pl. knn (k-nearest neighbor), nearest centroid, stb. További tulajdonságok: Kaotikus és/vagy nemlineáris környezetek támogatása Előzetes felmérést igényel a tanulási fázisban Az ujjlenyomatok egyedisége külön biztosítandó

17 Közelség-alapú módszer Közelség-alapú pozicionálás (Proximity) Kapuk, fojtópontok, fix állomások Detekció-alapú: Ha elegendően közel kerül az adó és a vevő, úgy a kommunikáció létrejötte az az esemény, amely az állomások közelségét jelzi. Jelenleg az egyik legelterjedtebb beltéri pozicionálási módszer
18 Relatív helymeghatározás Hozzávetőleges helymeghatározás Nincsenek abszolút referenciapontok Az elmozdulás iránya és nagysága határozza meg a trajektóriát az idő függvényében Abszolút pozíciók származtatása Pontosan ismert kiindulópontból és kezdeti irányból Jellemző megvalósítás Gyorsulásmérők, gyroszkópok, és iránytűk segítségével Komplex mozgásmodellek (dead-reckoning)
19 Pozicionálási technológiák Kültér GPS RTK Beltér Bluetooth, Wi-Fi RFID NFC, Rubee UWB Ultrahang Mágneses megoldások
20 Global Positioning System GPS Pontosság: kb. 3-5m A trilateráció elvét alkalmazza A műholdak pályája ismert Min. 3 műhold (x,y,z) + 1 az időszinkronhoz Földi irányítóegységek segítik Pontos pályaadatok Légkör torzításai

21 Global Positioning System Assisted GPS (A-GPS) Mobil hálózaton 7 napra előre megkapja a mobil készülék az aktuális pályaadatokat (Almanac), ezzel csökkentik az első pozíciómeghatározáshoz szükséges időt Egyébként mp lenne amíg letöltődne a műholdról Létezik olyan változat, ami cella-alapú pozicionálást is ad
22 Global Positioning System Satellite-based augmentation system (SBAS) A GPS rendszer egyik legfontosabb hibaforrása az ionoszféra és a troposzféra, ahol komoly késleltetést szenvedhet a jel, s így maga távolságbecslés (pseudorange) is torzulhat Megoldás: földi referencia állomások mérik a korrekciós adatokat, amiket átküldenek egy geostacioner pályán keringő műholdra, ami továbbszórja a felhasználóknak Európát az EGNOS (European Geostationary Navigation Overlay Service) rendszer keretein belül működtetett műholdak fedik le. Nagyrészt a légi közlekedést segítik Kb. 30 fokos elevációs szögben látszanak Ezt a megközelítést szokás Wide Area DGPS-nek nevezni
 Az EGNOS rendszer földi állomásai 2017.11.06.")
23 Global Positioning System Satellite-based augmentation system (SBAS) Az EGNOS rendszer földi állomásai

24 Global Positioning System Differenciális GPS (DGPS, vagy GBAS) Referenciaállomás (vevő) a földön (Base Station) Pontosan meghatározott ponton Korrekciós adatok szolgáltatása Mobil egység (Rover) Korrekciós adatok cseréje Pontosság: cm Függ a bázisállomástól való távolságtól Real Time Kinematic Kiegészíti a DGPS-t a vivőfázis, a Doppler-csúszás és egyéb paraméterek pontos mérésével 2 frekvenciás vevők (L1 és L2) 1-2cm-es pontosságú pozícióbecsléseket tesz lehetővé Drága
 Kozmikus geodéziai osztály Korrekciós adatok RINEX formátumban Valós és virtuális referencia állomások (ún. Mountpoint-ok) 2017.11.")
25 Global Positioning System DGPS és RTK állomások itthon Fenntartó: Budapest Föváros kormányhivatala Földmérési, távérzékelési és földhivatali osztály (FÖMI) Kozmikus geodéziai osztály Korrekciós adatok RINEX formátumban Valós és virtuális referencia állomások (ún. Mountpoint-ok)
26 Beltéri pozicionálási technológiák Aktív kontra passzív infrastruktúra Aktív: Az infrastruktúra végzi a pozicionálást Passzív: A követendő készülék végzi a pozicionálást Kültéren van passzív infrastruktúra (GPS, Csillagok, stb.) Beltérben nincs
27 Beltéri pozicionálási technológiák Aktív kontra passzív infrastruktúra Aktív: Nagy komplexitású algoritmusok Központi adatfeldolgozás Offline kvázi működésképtelen Kevésbé robosztus Költséges Passzív: Egyszerűbb algoritmusok Korlátozott számítási kapacitás a mobil eszközökön Offline is működőképes Robosztus Olcsóbb
28 802.11x (Wi-Fi) Beltéri pozicionálási technológiák Pontatlan óra (ToA, TDoA időmérésekre alkalmatlan) Vételi teljesítményen alapuló megoldások (RSSI) Trilateráció, ujjlenyomat-módszer és közelség-alapú Nem terjedt el Megközelítések Beacon vagy probe request frame-ek segítségével Alacsony frevenciával küldött csomagok (késleltetés) Magas infrastruktúra költségek (AP-k, routerek) Bizonyos platformokon erős megkötések Pl. ios-en nincs felderítés API-ból A probe request frame-ek küldése hektikus A MAC címek álvéletlen ugratása követhetetlenné teszi az eszközöket
29 Beltéri pozicionálási technológiák Bluetooth Az rendszeróra itt is pontatlan (ToA, TDoA-hoz nem jó) Vételi teljesítményen alapuló módszerek (RSSI) Trilateráció, fingerprinting és közelség-alapú Fokozatosan terjed (a piacon már elérhető) Pl. Apple ibeacon, Google Eddystone, stb. A hagyományos változat túlzottan lassú (1 minta / 10 mp) Ezen készülékek dominanciája fokozatosan csökken A Low Energy viszont gyors (400 minta / 10mp) Fokozatosan terjed A legtöbb mobil platformon elérhető Relatíve olcsó Az elérhető pontosság kérdéses
30 Beltéri pozicionálási technológiák Bluetooth A valóság kijózanító
31 Beltéri pozicionálási technológiák Bluetooth A valóság kijózanító
32 Beltéri pozicionálási technológiák Bluetooth (LE) Beacon technológiák Apple ibeacon A többi nagyobb techcégnek is megvan a maga változata Samsung Placedge, Google Eddystone Nyílt megoldás: altbeacon



33 Beltéri pozicionálási technológiák RFID Az iparban régóta alkalmazott technológia Kis hatótáv és pontatlan óra: Csak a közelség-alapú módszer alkalmazható Drága olvasók, olcsó tagek Alkalmazási környezet függvénye költség
34 Beltéri pozicionálási technológiák RFID
 megjelent már okostelefonokra, amelyek egy adott tag olvasásakor bizonyos akciók végrehajtást kezdeményezik A tagek könnyen elhelyezhetők bárhol")
35 Beltéri pozicionálási technológiák NFC Olcsó, passzív infrastruktúra 1-2cm-es közelség szükséges Tényleges érintés Számos alkalmazás (pl. Tasker, NFC Task Launcher) megjelent már okostelefonokra, amelyek egy adott tag olvasásakor bizonyos akciók végrehajtást kezdeményezik A tagek könnyen elhelyezhetők bárhol (matrica, kulcstartó)
 mágneses jeleket alkalmaz A")
 RFID jellegű technológia Jellemzően USA-beli minisztériumok a")
36 Beltéri pozicionálási technológiák Rubee Kevéssé ismert IEEE es szabvány rögzíti Hosszúhullámú (131kHz) mágneses jeleket alkalmaz A hatósugár gyorsabban csökken (Zero SSD) Átlát a vezető anyagokon (fém, víz, stb.) RFID jellegű technológia Jellemzően USA-beli minisztériumok a megrendelők
37 Beltéri pozicionálási technológiák Ultra-wideband (UWB) Eddig meglehetősen drága technológia volt Az utóbbi években már elérhető áron kínálják Kb. 3-8 GHz átfogású rádiók (max. 10,6 GHz) 500 MHz, 1 GHz és 1,3 GHz sávszélességek Rövid (kb. 2 ns) impulzusok Kritikus kérdés az antenna fázismenete Általában kalibrálni kell Referenciapontok: Anchor Követendő objektum: Tag Aktív infrastruktúra ToA, ill. TDoA méréseken alapul

38 Beltéri pozicionálási technológiák Ultra-wideband Aktuálisan cm-es pontosság Komoly hatósági korlátozások
 Természetes (fémes) zörejek is zavarják 2017.11.")
39 Beltéri pozicionálási technológiák Ultrahang Hangszórók és mikrofonok Chirp jelek A hang terjedési sebessége alcsonyabb Feldolgozni is sokkal könnyebb Akár < 1cm pontosság is elérhető Olcsó eszközökkel megvalósítható Ugyanazok a módszerek érvényesek Csak a közeg más Korlátozott hatótávolság (kb m) Természetes (fémes) zörejek is zavarják
Helymeghatározás. Balogh András BME-HIT
 Helymeghatározás Balogh András BME-HIT Pozícióbecslési metodikák Abszolút módszerek Háromszögelés Trilateráció Multilateráció Ujjlenyomat-módszer Közelség-alapú Relatív becslések Elmozdulás iránya és nagysága
Helymeghatározás Balogh András BME-HIT Pozícióbecslési metodikák Abszolút módszerek Háromszögelés Trilateráció Multilateráció Ujjlenyomat-módszer Közelség-alapú Relatív becslések Elmozdulás iránya és nagysága
A GNSS infrastruktúrára támaszkodó műholdas helymeghatározás. Borza Tibor (FÖMI KGO) Busics György (NyME GEO)
 Busics György (NyME GEO)") A GNSS infrastruktúrára támaszkodó műholdas helymeghatározás Borza Tibor (FÖMI KGO) Busics György (NyME GEO) Tartalom Mi a GNSS, a GNSS infrastruktúra? Melyek az infrastruktúra szintjei? Mi a hazai helyzet?
A GNSS infrastruktúrára támaszkodó műholdas helymeghatározás Borza Tibor (FÖMI KGO) Busics György (NyME GEO) Tartalom Mi a GNSS, a GNSS infrastruktúra? Melyek az infrastruktúra szintjei? Mi a hazai helyzet?
A PPP. a vonatkoztatási rendszer, az elmélet és gyakorlat összefüggése egy Fehérvár környéki kísérleti GNSS-mérés tapasztalatai alapján
 GISopen konferencia, Székesfehérvár, 2017. 04. 11-13. A PPP a vonatkoztatási rendszer, az elmélet és gyakorlat összefüggése egy Fehérvár környéki kísérleti GNSS-mérés tapasztalatai alapján Busics György
GISopen konferencia, Székesfehérvár, 2017. 04. 11-13. A PPP a vonatkoztatási rendszer, az elmélet és gyakorlat összefüggése egy Fehérvár környéki kísérleti GNSS-mérés tapasztalatai alapján Busics György
A GPS pozíciók pontosításának lehetőségei
 A GPS pozíciók pontosításának lehetőségei GIS OPEN 2005 Bartha Csaba csaba.bartha@geopro.hu Milyen fogalmakkal találkozunk? VRS GPS FKP EGNOS DGPS RTCM OGPSH GLONASS WAAS RTK STATIKUS GSM KINEMATIKUS URH
A GPS pozíciók pontosításának lehetőségei GIS OPEN 2005 Bartha Csaba csaba.bartha@geopro.hu Milyen fogalmakkal találkozunk? VRS GPS FKP EGNOS DGPS RTCM OGPSH GLONASS WAAS RTK STATIKUS GSM KINEMATIKUS URH
RFID rendszer felépítése
 RFID és RTLS RFID rendszer felépítése 1. Tag-ek (transzponder) 2. Olvasók (interrogátor) 3. Számítógépes infrastruktúra 4. Szoftverek Tárgyak, élőlények, helyszínek azonosítása, követése és menedzsmentje
RFID és RTLS RFID rendszer felépítése 1. Tag-ek (transzponder) 2. Olvasók (interrogátor) 3. Számítógépes infrastruktúra 4. Szoftverek Tárgyak, élőlények, helyszínek azonosítása, követése és menedzsmentje
Műholdas infokommunikációs rendszerek
 Mobil Informatika Műholdas infokommunikációs rendszerek Dr. Kutor László OE-NIK, Dr.Kutor László MoI 4/24/1 Műholdas távközlési rendszerek GEO (Geostationary Earth Orbit Satellite) Geostacionáris pályán
Mobil Informatika Műholdas infokommunikációs rendszerek Dr. Kutor László OE-NIK, Dr.Kutor László MoI 4/24/1 Műholdas távközlési rendszerek GEO (Geostationary Earth Orbit Satellite) Geostacionáris pályán
A GNSS Szolgáltató Központ 2009-ben www.gnssnet.hu. Galambos István FÖMI Kozmikus Geodéziai Obszervatórium
 A GNSS Szolgáltató Központ 2009-ben www.gnssnet.hu Galambos István FÖMI Kozmikus Geodéziai Obszervatórium Tartalom: A FÖMI GNSSnet.hu hálózata 2008 év végén Modernizáció a hálózatban 2009-ben A szolgáltatások
A GNSS Szolgáltató Központ 2009-ben www.gnssnet.hu Galambos István FÖMI Kozmikus Geodéziai Obszervatórium Tartalom: A FÖMI GNSSnet.hu hálózata 2008 év végén Modernizáció a hálózatban 2009-ben A szolgáltatások
TestLine - nummulites_gnss Minta feladatsor
 1.* Egy műholdas helymeghatározás lehet egyszerre abszolút és kinematikus. 2.* műholdak pillanatnyi helyzetéből és a megmért távolságokból számítható a vevő pozíciója. 3.* 0:55 Nehéz kinai BEIDOU, az amerikai
1.* Egy műholdas helymeghatározás lehet egyszerre abszolút és kinematikus. 2.* műholdak pillanatnyi helyzetéből és a megmért távolságokból számítható a vevő pozíciója. 3.* 0:55 Nehéz kinai BEIDOU, az amerikai
Hegyi Ádám István ELTE, április 25.
 Hegyi Ádám István ELTE, 2012. április 25. GPS = Global Positioning System Department of Defense = Amerikai Egyesült Államok Védelmi Minisztériuma 1973 DNSS = Defense Navigation Satellite System vagy Navstar-GPS
Hegyi Ádám István ELTE, 2012. április 25. GPS = Global Positioning System Department of Defense = Amerikai Egyesült Államok Védelmi Minisztériuma 1973 DNSS = Defense Navigation Satellite System vagy Navstar-GPS
Helymeghatározó technikák
 Mobil Informatika Dr. Kutor László Helymeghatározó technikák http://uni-obuda.hu/users/kutor/ MoI 5/24/1 Műholdas távközlési rendszerek GEO (Geostationary Earth Orbit Satellite) Geostacionáris pályán keringő
Mobil Informatika Dr. Kutor László Helymeghatározó technikák http://uni-obuda.hu/users/kutor/ MoI 5/24/1 Műholdas távközlési rendszerek GEO (Geostationary Earth Orbit Satellite) Geostacionáris pályán keringő
Mobil térinformatikai feladatmegoldások támogatása GNSS szolgáltatással
 Mobil térinformatikai feladatmegoldások támogatása GNSS szolgáltatással Horváth Tamás FÖMI Kozmikus Geodéziai Obszervatórium horvath@gnssnet.hu www.gnssnet.hu Tel.: 06-27-200-930 Mobil: 06-30-867-2570
Mobil térinformatikai feladatmegoldások támogatása GNSS szolgáltatással Horváth Tamás FÖMI Kozmikus Geodéziai Obszervatórium horvath@gnssnet.hu www.gnssnet.hu Tel.: 06-27-200-930 Mobil: 06-30-867-2570
INFORMATIKA ÁGAZATI ALKALMAZÁSAI. Az Agrármérnöki MSc szak tananyagfejlesztése TÁMOP-4.1.2-08/1/A-2009-0010
 INFORMATIKA ÁGAZATI ALKALMAZÁSAI Az Agrármérnöki MSc szak tananyagfejlesztése TÁMOP-4.1.2-08/1/A-2009-0010 10. GPS, GPRS (mobilkommunikációs) ismeretek Helymeghatározás GPS rendszer alapelve GNSS rendszerek
INFORMATIKA ÁGAZATI ALKALMAZÁSAI Az Agrármérnöki MSc szak tananyagfejlesztése TÁMOP-4.1.2-08/1/A-2009-0010 10. GPS, GPRS (mobilkommunikációs) ismeretek Helymeghatározás GPS rendszer alapelve GNSS rendszerek
Helymeghatározási alapelvek és módszerek
 Helymeghatározási alapelvek és módszerek Létező megoldások Hollósi Gergely 1, Lukovszki Csaba 1 1 Budapesti Műszaki és Gazdaságtudományi Egyetem Távközlési és Médiainformatikai Tanszék 2014 Összefoglaló
Helymeghatározási alapelvek és módszerek Létező megoldások Hollósi Gergely 1, Lukovszki Csaba 1 1 Budapesti Műszaki és Gazdaságtudományi Egyetem Távközlési és Médiainformatikai Tanszék 2014 Összefoglaló
Hol tart a GNSS állapot-tér modellezés bevezetése?
 Hol tart a GNSS állapot-tér modellezés bevezetése? Horváth Tamás FÖMI Kozmikus Geodéziai Obszervatórium horvath@gnssnet.hu www.gnssnet.hu Tel: +36-27-374-980, Mobil: +36-30-867-2570 Rédey István Geodéziai
Hol tart a GNSS állapot-tér modellezés bevezetése? Horváth Tamás FÖMI Kozmikus Geodéziai Obszervatórium horvath@gnssnet.hu www.gnssnet.hu Tel: +36-27-374-980, Mobil: +36-30-867-2570 Rédey István Geodéziai
PPP-RTK a hálózati RTK jövője?
 1 PPP-RTK a hálózati RTK jövője? Horváth Tamás FÖMI Kozmikus Geodéziai Obszervatórium Penc Rédey Szeminárium, BME, 006. április 6., Budapest Tartalom Emlékeztető Mérés-tér, állapot-tér PPP PPP-RTK Emlékeztető
1 PPP-RTK a hálózati RTK jövője? Horváth Tamás FÖMI Kozmikus Geodéziai Obszervatórium Penc Rédey Szeminárium, BME, 006. április 6., Budapest Tartalom Emlékeztető Mérés-tér, állapot-tér PPP PPP-RTK Emlékeztető
Takács Bence GPS: pontosság és megbízhatóság. Földmérők Világnapja és Európai Földmérők és Geoinformatikusok Napja Budapest, március 21.
 Takács Bence GPS: pontosság és megbízhatóság Földmérők Világnapja és Európai Földmérők és Geoinformatikusok Napja Budapest, 2018. március 21. AIRBUS A320 LOW VISIBILITY ILS CAT III AUTOLAND APPROACH IN
Takács Bence GPS: pontosság és megbízhatóság Földmérők Világnapja és Európai Földmérők és Geoinformatikusok Napja Budapest, 2018. március 21. AIRBUS A320 LOW VISIBILITY ILS CAT III AUTOLAND APPROACH IN
GPS szótár. A legfontosabb 25 kifejezés a GPS világából. Készítette: Gere Tamás A GPSArena.hu alapítója
 A legfontosabb 25 kifejezés a GPS világából Készítette: Gere Tamás A GPSArena.hu alapítója 2D/3D vétel Megadja, hogy a GPS vétel síkbeli (2D) vagy térbeli (3D). Utóbbi esetben magassági adat is rendelkezésre
A legfontosabb 25 kifejezés a GPS világából Készítette: Gere Tamás A GPSArena.hu alapítója 2D/3D vétel Megadja, hogy a GPS vétel síkbeli (2D) vagy térbeli (3D). Utóbbi esetben magassági adat is rendelkezésre
Híradástechnika I. 5.ea
 } Híradástechnika I. 5.ea Dr.Varga Péter János 2 Műholdas kommunikáció 3 4 Alkalmazott műholdpályák, tulajdonságaik 5 Alkalmazott műholdpályák, tulajdonságaik A LEO [Low Earth Orbiter ] magába foglalja
} Híradástechnika I. 5.ea Dr.Varga Péter János 2 Műholdas kommunikáció 3 4 Alkalmazott műholdpályák, tulajdonságaik 5 Alkalmazott műholdpályák, tulajdonságaik A LEO [Low Earth Orbiter ] magába foglalja
Aktív GNSS hálózat fejlesztése
 Aktív GNSS hálózat fejlesztése a penci KGO-ban Horváth Tamás Rédey István Szeminárium, BME, 2004. november 17. Tartalom Háttér Abszolút GNSS helymeghatározás Standalone DGNSS és RTK referencia állomások
Aktív GNSS hálózat fejlesztése a penci KGO-ban Horváth Tamás Rédey István Szeminárium, BME, 2004. november 17. Tartalom Háttér Abszolút GNSS helymeghatározás Standalone DGNSS és RTK referencia állomások
Interferencia jelenségek a BME permanens állomásán
 Interferencia jelenségek a BME permanens állomásán Takács Bence, egyetemi docens takacs.bence@epito.bme.hu Rédey szeminárium 2017. március 3. Nagy teljesítményű blokkolók hatótávolság : 200 km adó teljesítmény
Interferencia jelenségek a BME permanens állomásán Takács Bence, egyetemi docens takacs.bence@epito.bme.hu Rédey szeminárium 2017. március 3. Nagy teljesítményű blokkolók hatótávolság : 200 km adó teljesítmény
HÍRADÁSTECHNIKA I. Dr.Varga Péter János
 6. HÍRADÁSTECHNIKA I. Dr.Varga Péter János 2 Műholdas kommunikáció 3 4 Helymeghatározás 5 Alkalmazott műholdpályák, tulajdonságaik 6 Alkalmazott műholdpályák, tulajdonságaik A LEO [Low Earth Orbiter ]
6. HÍRADÁSTECHNIKA I. Dr.Varga Péter János 2 Műholdas kommunikáció 3 4 Helymeghatározás 5 Alkalmazott műholdpályák, tulajdonságaik 6 Alkalmazott műholdpályák, tulajdonságaik A LEO [Low Earth Orbiter ]
GPS mérési jegyz könyv
 GPS mérési jegyz könyv Mérést végezte: Csutak Balázs, Laczkó Hunor Mérés helye: ITK 320. terem és az egyetem környéke Mérés ideje: 2016.03.16 A mérés célja: Ismerkedés a globális helymeghatározó rendszerrel,
GPS mérési jegyz könyv Mérést végezte: Csutak Balázs, Laczkó Hunor Mérés helye: ITK 320. terem és az egyetem környéke Mérés ideje: 2016.03.16 A mérés célja: Ismerkedés a globális helymeghatározó rendszerrel,
A FÖLDMINŐSÍTÉS GEOMETRIAI ALAPJAI
 A FÖLDMINŐSÍTÉS GEOMETRIAI ALAPJAI Detrekői Ákos Keszthely, 2003. 12. 11. TARTALOM 1 Bevezetés 2 Milyen geometriai adatok szükségesek? 3 Néhány szó a referencia rendszerekről 4 Geometriai adatok forrásai
A FÖLDMINŐSÍTÉS GEOMETRIAI ALAPJAI Detrekői Ákos Keszthely, 2003. 12. 11. TARTALOM 1 Bevezetés 2 Milyen geometriai adatok szükségesek? 3 Néhány szó a referencia rendszerekről 4 Geometriai adatok forrásai
Kincskeresés GPS-el: a korszerű navigáció alapjai
 2007. február 22. : a korszerű navigáció alapjai Kovács Béla Térképtudományi és Geoinformatikai Tanszék Eötvös Loránd Tudományegyetem, Informatika Kar Térképtudományi és Geoinformatikai Tanszék 1117 Budapest,
2007. február 22. : a korszerű navigáció alapjai Kovács Béla Térképtudományi és Geoinformatikai Tanszék Eötvös Loránd Tudományegyetem, Informatika Kar Térképtudományi és Geoinformatikai Tanszék 1117 Budapest,
GNSS a precíziós mezőgazdaságban
 GNSS a precíziós mezőgazdaságban 2015.10.27. 1/14 GNSS a precíziós mezőgazdaságban Horváth Tamás Alberding GmbH GPS25 Konferencia Műholdas helymeghatározás Magyarországon 1990-2015 2015. október 27., Budapest
GNSS a precíziós mezőgazdaságban 2015.10.27. 1/14 GNSS a precíziós mezőgazdaságban Horváth Tamás Alberding GmbH GPS25 Konferencia Műholdas helymeghatározás Magyarországon 1990-2015 2015. október 27., Budapest
INFORMATIKA ÁGAZATI ALKALMAZÁSAI. Az Agrármérnöki MSc szak tananyagfejlesztése TÁMOP /1/A
 INFORMATIKA ÁGAZATI ALKALMAZÁSAI Az Agrármérnöki MSc szak tananyagfejlesztése TÁMOP-4.1.2-08/1/A-2009-0010 11. Globális helymeghatározás pontosító rendszerei Pontosságot befolyásoló tényezők Differenciális
INFORMATIKA ÁGAZATI ALKALMAZÁSAI Az Agrármérnöki MSc szak tananyagfejlesztése TÁMOP-4.1.2-08/1/A-2009-0010 11. Globális helymeghatározás pontosító rendszerei Pontosságot befolyásoló tényezők Differenciális
2007. március 23. INFO SAVARIA 2007. GNSS alapok. Eötvös Loránd Tudományegyetem, Informatika Kar. Térképtudományi és Geoinformatikai Tanszék
 2007. március 23. INFO SAVARIA 2007 GPS/GNSS GNSS alapok Kovács Béla Térképtudományi és Geoinformatikai Tanszék Eötvös Loránd Tudományegyetem, Informatika Kar Térképtudományi és Geoinformatikai Tanszék
2007. március 23. INFO SAVARIA 2007 GPS/GNSS GNSS alapok Kovács Béla Térképtudományi és Geoinformatikai Tanszék Eötvös Loránd Tudományegyetem, Informatika Kar Térképtudományi és Geoinformatikai Tanszék
Infokommunikáció a közlekedésben (VITMJV27)
") (VITMJV27) Hely fogalma, pozícionálási alapok, cellás pozícionálási technikák Heszberger Zalán Pozícionálási technológiák A pozícionálás fő elvei: bázispontok/állomások pontos helye ismert mért jel konverziója
(VITMJV27) Hely fogalma, pozícionálási alapok, cellás pozícionálási technikák Heszberger Zalán Pozícionálási technológiák A pozícionálás fő elvei: bázispontok/állomások pontos helye ismert mért jel konverziója
A GNSS technika szerepe az autópálya tervezési térképek készítésénél
 A GNSS technika szerepe az autópálya tervezési térképek készítésénél Készítette: Szászvári János Továbbképző Tagozat-Földügyi Informatikus Szak-Építési Geodézia Szakirány A témaválasztás indoklása, a dolgozat
A GNSS technika szerepe az autópálya tervezési térképek készítésénél Készítette: Szászvári János Továbbképző Tagozat-Földügyi Informatikus Szak-Építési Geodézia Szakirány A témaválasztás indoklása, a dolgozat
Robotika. Relatív helymeghatározás Odometria
 Robotika Relatív helymeghatározás Odometria Differenciális hajtás c m =πd n /nc e c m D n C e n = hány mm-t tesz meg a robot egy jeladó impulzusra = névleges kerék átmérő = jeladó fölbontása (impulzus/ford.)
Robotika Relatív helymeghatározás Odometria Differenciális hajtás c m =πd n /nc e c m D n C e n = hány mm-t tesz meg a robot egy jeladó impulzusra = névleges kerék átmérő = jeladó fölbontása (impulzus/ford.)
Agrár-környezetvédelmi Modul Agrár-környezetvédelem, agrotechnológia. KÖRNYEZETGAZDÁLKODÁSI MÉRNÖKI MSc TERMÉSZETVÉDELMI MÉRNÖKI MSc
 Agrár-környezetvédelmi Modul Agrár-környezetvédelem, agrotechnológia KÖRNYEZETGAZDÁLKODÁSI MÉRNÖKI MSc TERMÉSZETVÉDELMI MÉRNÖKI MSc Precíziós mezőgazdaság információ technológiai alapjai II. 138.lecke
Agrár-környezetvédelmi Modul Agrár-környezetvédelem, agrotechnológia KÖRNYEZETGAZDÁLKODÁSI MÉRNÖKI MSc TERMÉSZETVÉDELMI MÉRNÖKI MSc Precíziós mezőgazdaság információ technológiai alapjai II. 138.lecke
GPS és atomóra. Kunsági-Máté Sándor. Fizikus MSc 1. évfolyam
 GPS és atomóra Kunsági-Máté Sándor Fizikus MSc 1. évfolyam Informatikai eszközök fizikai alapjai, 2017. március 1. Eötvös Loránd Tudományegyetem, Természettudományi Kar, Budapest Történeti bevezető 1957
GPS és atomóra Kunsági-Máté Sándor Fizikus MSc 1. évfolyam Informatikai eszközök fizikai alapjai, 2017. március 1. Eötvös Loránd Tudományegyetem, Természettudományi Kar, Budapest Történeti bevezető 1957
RTK szolgáltatás földmérési és precíziós mezőgazdasági felhasználáshoz
 GISopen 2018 Székesfehérvár, 2018. március 13. RTK szolgáltatás földmérési és precíziós mezőgazdasági felhasználáshoz Haász László ügyvezető Infobex Kft. RTK szolgáltatás Követelmények az RTK val szemben
GISopen 2018 Székesfehérvár, 2018. március 13. RTK szolgáltatás földmérési és precíziós mezőgazdasági felhasználáshoz Haász László ügyvezető Infobex Kft. RTK szolgáltatás Követelmények az RTK val szemben
Alapok GPS előzmnyei Navstar How the GPS locate the position Tények Q/A GPS. Varsányi Péter
 Alapok előzmnyei Navstar How the locate the position Tények Q/A Óbudai Egyetem Alba Regia Egyetemi Központ (AREK) Székesfehérvár 2011. december 8. Alapok előzmnyei Navstar How the locate the position Tények
Alapok előzmnyei Navstar How the locate the position Tények Q/A Óbudai Egyetem Alba Regia Egyetemi Központ (AREK) Székesfehérvár 2011. december 8. Alapok előzmnyei Navstar How the locate the position Tények
A jogszabályi változások és a hazai infrastruktúrában történt fejlesztések hatása a GNSS mérésekre
 A jogszabályi változások és a hazai infrastruktúrában történt fejlesztések hatása a GNSS mérésekre Braunmüller Péter Galambos István MFTTT 29. Vándorgyűlés, Sopron 2013. Július 11. Földmérési és Távérzékelési
A jogszabályi változások és a hazai infrastruktúrában történt fejlesztések hatása a GNSS mérésekre Braunmüller Péter Galambos István MFTTT 29. Vándorgyűlés, Sopron 2013. Július 11. Földmérési és Távérzékelési
Hogyan mozognak a legjobb égi referenciapontok?
 Hogyan mozognak a legjobb égi referenciapontok? Moór Attila, Frey Sándor, Sebastien Lambert, Oleg Titov, Bakos Judit FÖMI Kozmikus Geodéziai Obszervatóriuma, Penc MTA Fizikai Geodézia és Geodinamikai Kutatócsoport,
Hogyan mozognak a legjobb égi referenciapontok? Moór Attila, Frey Sándor, Sebastien Lambert, Oleg Titov, Bakos Judit FÖMI Kozmikus Geodéziai Obszervatóriuma, Penc MTA Fizikai Geodézia és Geodinamikai Kutatócsoport,
Intelligens Közlekedési Rendszerek 2
 Intelligens Közlekedési Rendszerek 2 Máté Miklós 2016 Október 11 1 / 14 Szenzor (érzékelő): mérés, detektálás Mérés elmélet emlékeztető Jó mérőműszer tulajdonságai Érzékeny a mérendő tulajdonságra Érzéketlen
Intelligens Közlekedési Rendszerek 2 Máté Miklós 2016 Október 11 1 / 14 Szenzor (érzékelő): mérés, detektálás Mérés elmélet emlékeztető Jó mérőműszer tulajdonságai Érzékeny a mérendő tulajdonságra Érzéketlen
A rendszer legfontosabb jellemzőit az alábbiakban foglalhatjuk össze:
 GPS nyomkövető készülék, illetve navigációs rendszerek A GPS a Global Positioning System angol rövidítése és globális helymeghatározó rendszert jelent. Egy rendszer, amely 24 műholdból áll, melyet az USA
GPS nyomkövető készülék, illetve navigációs rendszerek A GPS a Global Positioning System angol rövidítése és globális helymeghatározó rendszert jelent. Egy rendszer, amely 24 műholdból áll, melyet az USA
GNSSnet.hu. Akár cm-es pontosságú műholdas helymeghatározás bárhol az országban. Földmérési és Távérzékelési Intézet GNSS Szolgáltató Központ
 Akár cm-es pontosságú műholdas helymeghatározás bárhol az országban Földmérési és Távérzékelési Intézet GNSS Szolgáltató Központ Precíziós mezőgazdálkodás Automatikus munkagépvezérlés cm-es pontossággal
Akár cm-es pontosságú műholdas helymeghatározás bárhol az országban Földmérési és Távérzékelési Intézet GNSS Szolgáltató Központ Precíziós mezőgazdálkodás Automatikus munkagépvezérlés cm-es pontossággal
Esri Arcpad 7.0.1. Utó- feldolgozás. Oktatási anyag - utókorrekció
 Esri Arcpad 7.0.1 & MobileMapper CE Utó- feldolgozás Oktatási anyag - utókorrekció Tartalomjegyzék GPS- MÉRÉSEK UTÓ- FELDOLGOZÁSA... 3 1.1 MŰHOLD ADATOK GYŰJTÉSÉNEK ELINDÍTÁSA, A ESRI ArcPad PROGRAMMAL
Esri Arcpad 7.0.1 & MobileMapper CE Utó- feldolgozás Oktatási anyag - utókorrekció Tartalomjegyzék GPS- MÉRÉSEK UTÓ- FELDOLGOZÁSA... 3 1.1 MŰHOLD ADATOK GYŰJTÉSÉNEK ELINDÍTÁSA, A ESRI ArcPad PROGRAMMAL
ADATÁTVITELI RENDSZEREK A GLOBÁLIS LOGISZTIKÁBAN
 9. ELŐADÁS ADATÁTVITELI RENDSZEREK A GLOBÁLIS LOGISZTIKÁBAN A logisztikai rendszerek irányításához szükség van az adatok továbbítására a rendszer különböző elemei között. Ezt a feladatot a különböző adatátviteli
9. ELŐADÁS ADATÁTVITELI RENDSZEREK A GLOBÁLIS LOGISZTIKÁBAN A logisztikai rendszerek irányításához szükség van az adatok továbbítására a rendszer különböző elemei között. Ezt a feladatot a különböző adatátviteli
A GNSSnet.hu aktualitásai; Geodéziai célú GNSS szolgáltatások hazánkban. GISopen Székesfehérvár,
 A GNSSnet.hu aktualitásai; Geodéziai célú GNSS szolgáltatások hazánkban Székesfehérvár, 2017.04.13. Galambos István Kozmikus Geodéziai Osztály GNSS szolgáltató központ Földmérési, Távérzékelési és Földhivatali
A GNSSnet.hu aktualitásai; Geodéziai célú GNSS szolgáltatások hazánkban Székesfehérvár, 2017.04.13. Galambos István Kozmikus Geodéziai Osztály GNSS szolgáltató központ Földmérési, Távérzékelési és Földhivatali
A DIGITÁLIS TÉRKÉP ADATAINAK ELŐÁLLÍTÁSA, ADATNYERÉSI ELJÁRÁSOK
 A DIGITÁLIS TÉRKÉP ADATAINAK ELŐÁLLÍTÁSA, ADATNYERÉSI ELJÁRÁSOK - két féle adatra van szükségünk: térbeli és leíró adatra - a térbeli adat előállítása a bonyolultabb. - a költségek nagyjából 80%-a - munkaigényes,
A DIGITÁLIS TÉRKÉP ADATAINAK ELŐÁLLÍTÁSA, ADATNYERÉSI ELJÁRÁSOK - két féle adatra van szükségünk: térbeli és leíró adatra - a térbeli adat előállítása a bonyolultabb. - a költségek nagyjából 80%-a - munkaigényes,
, ,457. GNSS technológia Budapest június 20 július 1.
 110,457 110,457 2 1 3 4 2 GNNS Elv, módszerek, Budapest 2016. június Földmérési és Távérzékelési Intézet Navigare necesse est, vivere non est necesse! Hajózni kell, élni nem kell!", Pompeius 6 3 TÁJÉKOZÓDÁS
110,457 110,457 2 1 3 4 2 GNNS Elv, módszerek, Budapest 2016. június Földmérési és Távérzékelési Intézet Navigare necesse est, vivere non est necesse! Hajózni kell, élni nem kell!", Pompeius 6 3 TÁJÉKOZÓDÁS
Kozmikus geodézia MSc
 Kozmikus geodézia MSc 1-4 előadás: Tóth Gy. 5-13 előadás: Ádám J. 2 ZH: 6/7. és 12/13. héten (max. 30 pont) alapismeretek, csillagkatalógusok, koordináta- és időrendszerek, függővonal iránymeghatározása
Kozmikus geodézia MSc 1-4 előadás: Tóth Gy. 5-13 előadás: Ádám J. 2 ZH: 6/7. és 12/13. héten (max. 30 pont) alapismeretek, csillagkatalógusok, koordináta- és időrendszerek, függővonal iránymeghatározása
Mozgásmodellezés. Lukovszki Csaba. Navigációs és helyalapú szolgáltatások és alkalmazások (VITMMA07)
") TÁVKÖZLÉSI ÉS MÉDIAINFORMATIKAI TANSZÉK () BUDAPESTI MŰSZAKI ÉS GAZDASÁGTUDOMÁNYI EGYETEM (BME) Mozgásmodellezés Lukovszki Csaba Áttekintés» Probléma felvázolása» Szabadsági fokok» Diszkretizált» Hibát
TÁVKÖZLÉSI ÉS MÉDIAINFORMATIKAI TANSZÉK () BUDAPESTI MŰSZAKI ÉS GAZDASÁGTUDOMÁNYI EGYETEM (BME) Mozgásmodellezés Lukovszki Csaba Áttekintés» Probléma felvázolása» Szabadsági fokok» Diszkretizált» Hibát
Geodéziai célú GNSS szolgáltatások a hazai műholdas helymeghatározásban
 Geodéziai célú GNSS szolgáltatások a hazai műholdas helymeghatározásban Galambos István Kozmikus Geodéziai Osztály GNSS szolgáltató központ Földmérési, Távérzékelési és Földhivatali Főosztály 1149 Budapest,
Geodéziai célú GNSS szolgáltatások a hazai műholdas helymeghatározásban Galambos István Kozmikus Geodéziai Osztály GNSS szolgáltató központ Földmérési, Távérzékelési és Földhivatali Főosztály 1149 Budapest,
Valós idejű helymeghatározás Wi-Fi rendszer felhasználásával. deeper. Juhos Attila
 Valós idejű helymeghatározás Wi-Fi rendszer felhasználásával deeper Juhos Attila Helymeghatározási módszerek Távolság és távolságkülönbség mérése Szögkülönbség-mérés Sebességmérés Csillapítás - Jelerősség
Valós idejű helymeghatározás Wi-Fi rendszer felhasználásával deeper Juhos Attila Helymeghatározási módszerek Távolság és távolságkülönbség mérése Szögkülönbség-mérés Sebességmérés Csillapítás - Jelerősség
Rádiófrekvenciás kommunikációs rendszerek
 Rádiófrekvenciás kommunikációs rendszerek Adó Adó Vevő Jellemzően broadcast adás (széles földrajzi terület besugárzása, TV, Rádió műsor adás) Adó Vevő Vevő Adó Különböző kommunikációs formák. Kis- és nagykapacitású
Rádiófrekvenciás kommunikációs rendszerek Adó Adó Vevő Jellemzően broadcast adás (széles földrajzi terület besugárzása, TV, Rádió műsor adás) Adó Vevő Vevő Adó Különböző kommunikációs formák. Kis- és nagykapacitású
Koordináta-rendszerek
 Koordináta-rendszerek Térkép: a Föld felszín (részletének) ábrázolása síkban Hogyan határozható meg egy pont helyzete egy síkon? Derékszögű koordináta-rendszer: a síkban két, egymást merőlegesen metsző
Koordináta-rendszerek Térkép: a Föld felszín (részletének) ábrázolása síkban Hogyan határozható meg egy pont helyzete egy síkon? Derékszögű koordináta-rendszer: a síkban két, egymást merőlegesen metsző
I. Telematikai rendszerek
 I. Telematikai rendszerek Telekommunikáció+Informatika=TeleMatika TRACKING & TRACING - áru és jármű nyomon követés, útvonaltervezés TRANSZPONDERES azonosítás veszélyes, romlandó áruk kezelése NAVIGÁCIÓ
I. Telematikai rendszerek Telekommunikáció+Informatika=TeleMatika TRACKING & TRACING - áru és jármű nyomon követés, útvonaltervezés TRANSZPONDERES azonosítás veszélyes, romlandó áruk kezelése NAVIGÁCIÓ
Bevezetés a geodéziába
 Bevezetés a geodéziába 1 Geodézia Definíció: a földmérés a Föld alakjának és méreteinek, a Föld fizikai felszínén, ill. a felszín alatt lévő természetes és mesterséges alakzatok geometriai méreteinek és
Bevezetés a geodéziába 1 Geodézia Definíció: a földmérés a Föld alakjának és méreteinek, a Föld fizikai felszínén, ill. a felszín alatt lévő természetes és mesterséges alakzatok geometriai méreteinek és
Markerek jól felismerhetőek, elkülöníthetők a környezettől Korlátos hiba
 1. Ismertesse a relatív és abszolút pozíciómegatározás tulajdonságait, és lehetőségeit. Mit jelent a dead reckoning, és mi az odometria? Milyen hibalehetőségekre kell számítanunk odometria alkalmazásakor?
1. Ismertesse a relatív és abszolút pozíciómegatározás tulajdonságait, és lehetőségeit. Mit jelent a dead reckoning, és mi az odometria? Milyen hibalehetőségekre kell számítanunk odometria alkalmazásakor?
LOCATION BASED SERVICES
 LOCATION BASED SERVICES Budapesti Műszaki és Gazdaságtudományi Egyetem Közlekedésüzemi és Közlekedésgazdasági Tanszék Közlekedési Áramlatok Esztergár-Kiss Domokos esztergar@mail.bme.hu Tartalom TARTALOM
LOCATION BASED SERVICES Budapesti Műszaki és Gazdaságtudományi Egyetem Közlekedésüzemi és Közlekedésgazdasági Tanszék Közlekedési Áramlatok Esztergár-Kiss Domokos esztergar@mail.bme.hu Tartalom TARTALOM
Új szolgáltatási képességek I.: földrajzi hely alapú szolgáltatások
 Budapesti Műszaki és Gazdaságtudományi Egyetem Villamosmérnöki és Informatikai Kar Mérnök informatikus szak, mesterképzés Hírközlő rendszerek biztonsága szakirány Villamosmérnöki szak, mesterképzés - Újgenerációs
Budapesti Műszaki és Gazdaságtudományi Egyetem Villamosmérnöki és Informatikai Kar Mérnök informatikus szak, mesterképzés Hírközlő rendszerek biztonsága szakirány Villamosmérnöki szak, mesterképzés - Újgenerációs
15/2013. (III. 11.) VM rendelet
 VM rendelet") 15/2013. (III. 11.) VM rendelet a térképészetért felelős miniszter felelősségi körébe tartozó állami alapadatok és térképi adatbázisok vonatkoztatási és vetületi rendszeréről, alapadat-tartalmáról, létrehozásának,
15/2013. (III. 11.) VM rendelet a térképészetért felelős miniszter felelősségi körébe tartozó állami alapadatok és térképi adatbázisok vonatkoztatási és vetületi rendszeréről, alapadat-tartalmáról, létrehozásának,
Murinkó Gergő
 2018.10.10 Murinkó Gergő P r o f e s s z i o n á l i s K ö z m ű k e r e s ő k 2 - Munkabiztonság - Eltakart értékek védelme - Feltárások felgyorsítása Kérdések és válaszok? - Milyen anyagú cső, milyen
2018.10.10 Murinkó Gergő P r o f e s s z i o n á l i s K ö z m ű k e r e s ő k 2 - Munkabiztonság - Eltakart értékek védelme - Feltárások felgyorsítása Kérdések és válaszok? - Milyen anyagú cső, milyen
GNSS/RNSS rendszerek a földmegfigyelésben. Dr. Rózsa Szabolcs. Általános és Felsőgeodézia Tanszék
 GNSS/RNSS rendszerek a földmegfigyelésben Általános és Felsőgeodézia Tanszék Dr. Rózsa Szabolcs Minőségorientált, összehangolt oktatási és K+F+I stratégia, valamint működési modell kidolgozása a Műegyetemen
GNSS/RNSS rendszerek a földmegfigyelésben Általános és Felsőgeodézia Tanszék Dr. Rózsa Szabolcs Minőségorientált, összehangolt oktatási és K+F+I stratégia, valamint működési modell kidolgozása a Műegyetemen
A műholdas helymeghatározás infrastruktúrája
 Népszerűen a műholdas helymeghatározásról és navigációról 2. rész Az idő mérése, karóránk leolvasása, ma mindannyiunk számára természetes tevékenység. De vajon ugyanilyen természetes és szükséges lesz-e
Népszerűen a műholdas helymeghatározásról és navigációról 2. rész Az idő mérése, karóránk leolvasása, ma mindannyiunk számára természetes tevékenység. De vajon ugyanilyen természetes és szükséges lesz-e
3D számítógépes geometria és alakzatrekonstrukció
 3D számítógépes geometria és alakzatrekonstrukció 15. Digitális Alakzatrekonstrukció Méréstechnológia, Ponthalmazok regisztrációja http://cg.iit.bme.hu/portal/node/312 https://www.vik.bme.hu/kepzes/targyak/viiima01
3D számítógépes geometria és alakzatrekonstrukció 15. Digitális Alakzatrekonstrukció Méréstechnológia, Ponthalmazok regisztrációja http://cg.iit.bme.hu/portal/node/312 https://www.vik.bme.hu/kepzes/targyak/viiima01
Mobil helymeghatározás. Zsiborás Attila
 Mobil helymeghatározás Zsiborás Attila Miről lesz szó? És miről nem Szóbeszéd, közhiedelem, tévinformáció Jogi, szabályozási háttér Mobil helymeghatározás műszaki megoldásai Mobil hálózat alapú megoldások
Mobil helymeghatározás Zsiborás Attila Miről lesz szó? És miről nem Szóbeszéd, közhiedelem, tévinformáció Jogi, szabályozási háttér Mobil helymeghatározás műszaki megoldásai Mobil hálózat alapú megoldások
Mozgó jármű helyzetének és tájolásának meghatározása alacsony árú GNSS és inerciális érzékelők szoros csatolású integrációjával
 Mozgó jármű helyzetének és tájolásának meghatározása alacsony árú GNSS és inerciális érzékelők szoros csatolású integrációjával Farkas Márton Rédey István Geodéziai Szeminárium 2019. április 2. Áttekintés
Mozgó jármű helyzetének és tájolásának meghatározása alacsony árú GNSS és inerciális érzékelők szoros csatolású integrációjával Farkas Márton Rédey István Geodéziai Szeminárium 2019. április 2. Áttekintés
ÉRZÉKELŐK ÉS BEAVATKOZÓK I. PÉLDÁK - FELADATOK
 ÉRZÉKELŐK ÉS BEAVATKOZÓK I. PÉLDÁK - FELADATOK Dr. Soumelidis Alexandros 2018.09.06. BME KÖZLEKEDÉSMÉRNÖKI ÉS JÁRMŰMÉRNÖKI KAR 32708-2/2017/INTFIN SZÁMÚ EMMI ÁLTAL TÁMOGATOTT TANANYAG Idei fő példafeladat:
ÉRZÉKELŐK ÉS BEAVATKOZÓK I. PÉLDÁK - FELADATOK Dr. Soumelidis Alexandros 2018.09.06. BME KÖZLEKEDÉSMÉRNÖKI ÉS JÁRMŰMÉRNÖKI KAR 32708-2/2017/INTFIN SZÁMÚ EMMI ÁLTAL TÁMOGATOTT TANANYAG Idei fő példafeladat:
A Föld alakja TRANSZFORMÁCIÓ. Magyarországon még használatban lévő vetületi rendszerek. Miért kell transzformálni? Főbb transzformációs lehetőségek
 TRANSZFORMÁCIÓ A Föld alakja -A föld alakja: geoid (az a felület, amelyen a nehézségi gyorsulás értéke állandó) szabálytalan alak, kezelése nehéz -A geoidot ellipszoiddal közelítjük -A földfelszíni pontokat
TRANSZFORMÁCIÓ A Föld alakja -A föld alakja: geoid (az a felület, amelyen a nehézségi gyorsulás értéke állandó) szabálytalan alak, kezelése nehéz -A geoidot ellipszoiddal közelítjük -A földfelszíni pontokat
GEODÉTA-NET RTK szolgáltatása
 GEODÉTA-NET RTK szolgáltatása 2017 Haász László infobex Kft. Székesfehérvár, 2017. április 12. GEODÉTA-NET RTK hálózat 52 permanens állomás GEODÉTA-NET RTK hálózat 52 permanens állomás GEODÉTA-NET RTK
GEODÉTA-NET RTK szolgáltatása 2017 Haász László infobex Kft. Székesfehérvár, 2017. április 12. GEODÉTA-NET RTK hálózat 52 permanens állomás GEODÉTA-NET RTK hálózat 52 permanens állomás GEODÉTA-NET RTK
Enhanced Observed Time Difference (E- OTD)
") Enhanced Observed Time Difference (E- OTD) dr. Paller Gábor Készült Axel Küpper: Location-Based Services: Fundamentals and Operation c. könyve alapján E-OTD E-OTD: hiperbolikus háromszögelés a terminál
Enhanced Observed Time Difference (E- OTD) dr. Paller Gábor Készült Axel Küpper: Location-Based Services: Fundamentals and Operation c. könyve alapján E-OTD E-OTD: hiperbolikus háromszögelés a terminál
A GEODÉTA-NET RTK szolgáltatása
 A GEODÉTA-NET RTK szolgáltatása MFTTT 31. Vándorgyűlés Szekszárd, 2017. július 8. Németh Zoltán infobex Kft. Mit kínálunk? A GEODÉTA-NET RTK szolgáltatását Háttér A GEODÉTA-NET RTK hálózata 52 permanens
A GEODÉTA-NET RTK szolgáltatása MFTTT 31. Vándorgyűlés Szekszárd, 2017. július 8. Németh Zoltán infobex Kft. Mit kínálunk? A GEODÉTA-NET RTK szolgáltatását Háttér A GEODÉTA-NET RTK hálózata 52 permanens
HÍRADÁSTECHNIKA. Dr.Varga Péter János
 HÍRADÁSTECHNIKA Dr.Varga Péter János 2 A jelátvitel fizikai közegei 3 Vezeték nélküli átvitel Optikai átvitel - Lézer átvitel 4 pont-pont közötti adatátvitel, láthatóság átvitel lézerrel néhány km távolság
HÍRADÁSTECHNIKA Dr.Varga Péter János 2 A jelátvitel fizikai közegei 3 Vezeték nélküli átvitel Optikai átvitel - Lézer átvitel 4 pont-pont közötti adatátvitel, láthatóság átvitel lézerrel néhány km távolság
GNSSnet.hu a hazai GNSS infrastruktúra Földmérési és Távérzékelési Intézet
 GNSSnet.hu a hazai GNSS infrastruktúra Földmérési és Távérzékelési Intézet Tartalom 47/2010. (IV. 27.) FVM rendelet A hazai GNSS infrastruktúra Miért válasszuk a GNSSnet.hu rendszert? Felhasználók száma
GNSSnet.hu a hazai GNSS infrastruktúra Földmérési és Távérzékelési Intézet Tartalom 47/2010. (IV. 27.) FVM rendelet A hazai GNSS infrastruktúra Miért válasszuk a GNSSnet.hu rendszert? Felhasználók száma
3D - geometriai modellezés, alakzatrekonstrukció, nyomtatás
 3D - geometriai modellezés, alakzatrekonstrukció, nyomtatás 15. Digitális Alakzatrekonstrukció Méréstechnológia, Ponthalmazok regisztrációja http://cg.iit.bme.hu/portal/node/312 https://www.vik.bme.hu/kepzes/targyak/viiiav54
3D - geometriai modellezés, alakzatrekonstrukció, nyomtatás 15. Digitális Alakzatrekonstrukció Méréstechnológia, Ponthalmazok regisztrációja http://cg.iit.bme.hu/portal/node/312 https://www.vik.bme.hu/kepzes/targyak/viiiav54
MIKOVINY SÁMUEL TÉRINFORMATIKAI EMLÉKVERSENY
 FVM VIDÉKFEJLESZTÉSI, KÉPZÉSI ÉS SZAKTANÁCSADÁSI INTÉZET NYUGAT MAGYARORSZÁGI EGYETEM GEOINFORMATIKAI KAR MIKOVINY SÁMUEL TÉRINFORMATIKAI EMLÉKVERSENY 2008/2009. TANÉV Az I. FORDULÓ FELADATAI NÉV:... Tudnivalók
FVM VIDÉKFEJLESZTÉSI, KÉPZÉSI ÉS SZAKTANÁCSADÁSI INTÉZET NYUGAT MAGYARORSZÁGI EGYETEM GEOINFORMATIKAI KAR MIKOVINY SÁMUEL TÉRINFORMATIKAI EMLÉKVERSENY 2008/2009. TANÉV Az I. FORDULÓ FELADATAI NÉV:... Tudnivalók
Egy pont földfelszíni helyzetét meghatározzák: a pont alapfelületi földrajzi koordinátái a pont tengerszint feletti magassága
 Földrajzi koordináták Egy pont földfelszíni helyzetét meghatározzák: a pont alapfelületi földrajzi koordinátái a pont tengerszint feletti magassága Topo-Karto-2 1 Földrajzi koordináták pólus egyenlítő
Földrajzi koordináták Egy pont földfelszíni helyzetét meghatározzák: a pont alapfelületi földrajzi koordinátái a pont tengerszint feletti magassága Topo-Karto-2 1 Földrajzi koordináták pólus egyenlítő
TECHNOLÓGIA-VÁLTÁS A GNSS KORSZAKBAN. Busics György
 TECHNOLÓGIA-VÁLTÁS A GNSS KORSZAKBAN Busics György Technology change in the GNSS era The Global navigation Satellite System (GNSS) era means that we can use a lot of services of the permanent station network.
TECHNOLÓGIA-VÁLTÁS A GNSS KORSZAKBAN Busics György Technology change in the GNSS era The Global navigation Satellite System (GNSS) era means that we can use a lot of services of the permanent station network.
INFORMATIKA ÁGAZATI ALKALMAZÁSAI. Az Agrármérnöki MSc szak tananyagfejlesztése TÁMOP-4.1.2-08/1/A-2009-0010
 INFORMATIKA ÁGAZATI ALKALMAZÁSAI Az Agrármérnöki MSc szak tananyagfejlesztése TÁMOP-4.1.2-08/1/A-2009-0010 13. GNSS mérés tervezése, végrehajtása Tervezés célja, eszközei, almanach GNSS tervező szoftverek
INFORMATIKA ÁGAZATI ALKALMAZÁSAI Az Agrármérnöki MSc szak tananyagfejlesztése TÁMOP-4.1.2-08/1/A-2009-0010 13. GNSS mérés tervezése, végrehajtása Tervezés célja, eszközei, almanach GNSS tervező szoftverek
Az NFC-technológia mindennapi életben való alkalmazásának vonzó lehetőségei
 Az NFC-technológia mindennapi életben való alkalmazásának vonzó lehetőségei Perjési András andris@aries.ektf.hu FutureRFID - Az RFID/NFC technológia továbbfejlesztési lehetőségei az Internet of Things
Az NFC-technológia mindennapi életben való alkalmazásának vonzó lehetőségei Perjési András andris@aries.ektf.hu FutureRFID - Az RFID/NFC technológia továbbfejlesztési lehetőségei az Internet of Things
Magasságos GPS. avagy továbbra is
 Magasságos GPS avagy továbbra is Tisztázatlan kérdések az RTK-technológiával végzett magasságmeghatározás területén? http://www.sgo.fomi.hu/files/magassagi_problemak.pdf Takács Bence BME Általános- és
Magasságos GPS avagy továbbra is Tisztázatlan kérdések az RTK-technológiával végzett magasságmeghatározás területén? http://www.sgo.fomi.hu/files/magassagi_problemak.pdf Takács Bence BME Általános- és
GPS. 1.a A GLONASS rendszer. Feladata. A rendszer felépítése. A GLONASS és s a GALILEO GPS- rendszerek. Céljaiban NAVSTAR GPS rendszerhez
 GPS A GLONASS és s a GALILEO GPS- rendszerek Összeállította: Szűcs LászlL szló 1.a A GLONASS rendszer Globális lis Navigáci ciós s Műholdrendszer M orosz elnevezés s rövidr vidítése Céljaiban és s kialakításában
GPS A GLONASS és s a GALILEO GPS- rendszerek Összeállította: Szűcs LászlL szló 1.a A GLONASS rendszer Globális lis Navigáci ciós s Műholdrendszer M orosz elnevezés s rövidr vidítése Céljaiban és s kialakításában
KUTATÁSI JELENTÉS. Multilaterációs radarrendszer kutatása. Szüllő Ádám
 KUTATÁSI JELENTÉS Multilaterációs radarrendszer kutatása Szüllő Ádám 212 Bevezetés A Mikrohullámú Távérzékelés Laboratórium jelenlegi K+F tevékenységei közül ezen jelentés a multilaterációs radarrendszerek
KUTATÁSI JELENTÉS Multilaterációs radarrendszer kutatása Szüllő Ádám 212 Bevezetés A Mikrohullámú Távérzékelés Laboratórium jelenlegi K+F tevékenységei közül ezen jelentés a multilaterációs radarrendszerek
A magyarországi GNSS-infrastruktúra
 A magyarországi GNSS-infrastruktúra Horváth Tamás BME Általános- és Felsőgeodézia tanszék, 2005. május 3. Tartalom GNSS hálózatok Passzív hálózat OGPSH (első generációs hálózat) Aktív hálózat (második
A magyarországi GNSS-infrastruktúra Horváth Tamás BME Általános- és Felsőgeodézia tanszék, 2005. május 3. Tartalom GNSS hálózatok Passzív hálózat OGPSH (első generációs hálózat) Aktív hálózat (második
Ingatlan felmérési technológiák
 Ingatlan felmérési technológiák Fekete Attila okl. földmérő és térinformatikai mérnök Photo.metric Kft. www.photometric.hu geodézia. épületfelmérés. térinformatika Áttekintés Mérési módszerek, technológiák
Ingatlan felmérési technológiák Fekete Attila okl. földmérő és térinformatikai mérnök Photo.metric Kft. www.photometric.hu geodézia. épületfelmérés. térinformatika Áttekintés Mérési módszerek, technológiák
Érsek Ákos. GPSCOM Kft.
 ASHTECH mobil térinformatikai adatgyűjtők HUNAGI 3.MobilGIS konferencia 2012, Budapest Érsek Ákos 1 GPSCOM Kft. Alaptérkép felvétel a ProMark800 készülékkel Az legújabb GNSS centrikus vevő amely képes
ASHTECH mobil térinformatikai adatgyűjtők HUNAGI 3.MobilGIS konferencia 2012, Budapest Érsek Ákos 1 GPSCOM Kft. Alaptérkép felvétel a ProMark800 készülékkel Az legújabb GNSS centrikus vevő amely képes
Alapfokú barlangjáró tanfolyam
 Tájékozódási ismeretek, barlangtérképezés Ország János Szegedi Karszt- és Barlangkutató Egyesület Alapfokú barlangjáró tanfolyam Orfű Tájékozódás felszínen: Térképek segítségével GPS koordinátákkal
Tájékozódási ismeretek, barlangtérképezés Ország János Szegedi Karszt- és Barlangkutató Egyesület Alapfokú barlangjáró tanfolyam Orfű Tájékozódás felszínen: Térképek segítségével GPS koordinátákkal
2. fejezet. Vetületi alapfogalmak. Dr. Mélykúti Gábor
 2. fejezet Dr. Mélykúti Gábor Nyugat-magyarországi Egyetem Geoinformatikai Kar 2010 2.1 Bevezetés A modul a Térképtan és a Topográfia c. tantárgyak részét képezi. A modul a térképek készítése és használata
2. fejezet Dr. Mélykúti Gábor Nyugat-magyarországi Egyetem Geoinformatikai Kar 2010 2.1 Bevezetés A modul a Térképtan és a Topográfia c. tantárgyak részét képezi. A modul a térképek készítése és használata
3. Vetülettan (3/6., 8., 10.) Unger János. @geo.u-szeged.hu www.sci.u-szeged.hu/eghajlattan
 Unger János. @geo.u-szeged.hu www.sci.u-szeged.hu/eghajlattan") Kartográfia (GBN309E) Térképészet (GBN317E) előadás 3. Vetülettan (3/6., 8., 10.) Unger János unger@geo.u @geo.u-szeged.hu www.sci.u-szeged.hu/eghajlattan szeged.hu/eghajlattan SZTE Éghajlattani és Tájföldrajzi
Kartográfia (GBN309E) Térképészet (GBN317E) előadás 3. Vetülettan (3/6., 8., 10.) Unger János unger@geo.u @geo.u-szeged.hu www.sci.u-szeged.hu/eghajlattan szeged.hu/eghajlattan SZTE Éghajlattani és Tájföldrajzi
Érzékelők csoportosítása Passzív Nem letapogató Nem képalkotó mh. radiométer, graviméter Képalkotó - Kamerák Letapogató (képalkotó) Képsíkban TV kamer
 Képsíkban TV kamer") Monitoring távérzékeléssel - aktív digitális érzékelők (E130-501) Természetvédelmi MSc szak Király Géza NyME, Erdőmérnöki Kar Geomatikai, Erdőfeltárási és Vízgazdálkodási Intézet Földmérési és Távérzékelési
Monitoring távérzékeléssel - aktív digitális érzékelők (E130-501) Természetvédelmi MSc szak Király Géza NyME, Erdőmérnöki Kar Geomatikai, Erdőfeltárási és Vízgazdálkodási Intézet Földmérési és Távérzékelési
A GNSS SZOLGÁLTAT LTATÓ. Mnyerczán András FÖMI Kozmikus Geodéziai Obszervatórium. GIS Open, 2007 március 12, Székesfehérvár
 A GNSS SZOLGÁLTAT LTATÓ KÖZPONT 2007-BEN Mnyerczán András FÖMI Kozmikus Geodéziai Obszervatórium GIS Open, 2007 március 12, Székesfehérvár Tartalom A referenciaállomás-hálózat jelenlegi helyzete A GNSS
A GNSS SZOLGÁLTAT LTATÓ KÖZPONT 2007-BEN Mnyerczán András FÖMI Kozmikus Geodéziai Obszervatórium GIS Open, 2007 március 12, Székesfehérvár Tartalom A referenciaállomás-hálózat jelenlegi helyzete A GNSS
Irányító és kommunikációs rendszerek III. Előadás 13
 Irányító és kommunikációs rendszerek III. Előadás 13 GSM-R Flottamenedzsment Mobil fizetési lehetőségek Parkolási díj Útdíj A GSM közlekedési felhasználása Valós idejű információs szolgáltatás Közlekedési
Irányító és kommunikációs rendszerek III. Előadás 13 GSM-R Flottamenedzsment Mobil fizetési lehetőségek Parkolási díj Útdíj A GSM közlekedési felhasználása Valós idejű információs szolgáltatás Közlekedési
Székesfehérvár
 1 2009.03.19. - Székesfehérvár System1200-2004 SmartStation - 2005 SmartRover - 2006 SmartPole/TPS1200+ 2007 SmartRTK + MAC 2008 GPS1200+ GNSS 2009-200? 2 ? Elérhető GNSS jelek haszn. Modern hálózati megold.
1 2009.03.19. - Székesfehérvár System1200-2004 SmartStation - 2005 SmartRover - 2006 SmartPole/TPS1200+ 2007 SmartRTK + MAC 2008 GPS1200+ GNSS 2009-200? 2 ? Elérhető GNSS jelek haszn. Modern hálózati megold.
Magellan térinformatikai GPS vevők GIS OPEN konferencia 2007 Székesfehérvár Érsek Ákos, Guards Zrt.
 Magellan térinformatikai GPS vevők GIS OPEN konferencia 2007 Székesfehérvár Érsek Ákos, Guards Zrt. Vezető gyártó a GNSS navigációban és helymeghatározásban 1 Fedezze fel a Magellan-t 2006. Augusztus 31.-én
Magellan térinformatikai GPS vevők GIS OPEN konferencia 2007 Székesfehérvár Érsek Ákos, Guards Zrt. Vezető gyártó a GNSS navigációban és helymeghatározásban 1 Fedezze fel a Magellan-t 2006. Augusztus 31.-én
Az RFID technológia bemutatása
 Állami Nyomda Nyrt. RFID (Rádiófrekvenciás Azonosítás) Az RFID technológia bemutatása Rácz László, chipkártya és RFID tanácsadó racz@any.hu, Telefon: 431 1393 Állami Nyomda Nyrt. www.allaminyomda.hu RFID
Állami Nyomda Nyrt. RFID (Rádiófrekvenciás Azonosítás) Az RFID technológia bemutatása Rácz László, chipkártya és RFID tanácsadó racz@any.hu, Telefon: 431 1393 Állami Nyomda Nyrt. www.allaminyomda.hu RFID
Leica Viva GNSS SmartLink technológia. Csábi Zoltán mérnök üzletkötő, Kelet-Magyarország
 Leica Viva GNSS SmartLink technológia Csábi Zoltán mérnök üzletkötő, Kelet-Magyarország Kitoljuk a határokat Leica Viva GNSS technológia Az igazi határ ott van ahol a műszer még éppen működik, illetve
Leica Viva GNSS SmartLink technológia Csábi Zoltán mérnök üzletkötő, Kelet-Magyarország Kitoljuk a határokat Leica Viva GNSS technológia Az igazi határ ott van ahol a műszer még éppen működik, illetve
RTKLIB alapú monitorozó alkalmazások
 Horváth Tamás RTKLIB alapú monitorozó megoldások 2015.11.27. 1/28 RTKLIB alapú monitorozó alkalmazások Horváth Tamás Alberding GmbH FOSS4GÉZÚ Nyílt forráskódú térinformatikai munkaértekezlet 2015. november
Horváth Tamás RTKLIB alapú monitorozó megoldások 2015.11.27. 1/28 RTKLIB alapú monitorozó alkalmazások Horváth Tamás Alberding GmbH FOSS4GÉZÚ Nyílt forráskódú térinformatikai munkaértekezlet 2015. november
Kábel nélküli hálózatok. Agrárinformatikai Nyári Egyetem Gödöllő 2004
 Kábel nélküli hálózatok Agrárinformatikai Nyári Egyetem Gödöllő 2004 Érintett témák Mért van szükségünk kábelnélküli hálózatra? Hogyan válasszunk a megoldások közül? Milyen elemekből építkezhetünk? Milyen
Kábel nélküli hálózatok Agrárinformatikai Nyári Egyetem Gödöllő 2004 Érintett témák Mért van szükségünk kábelnélküli hálózatra? Hogyan válasszunk a megoldások közül? Milyen elemekből építkezhetünk? Milyen
RFID-val támogatott eszközleltár
 1. A rendszer célja RFID-val támogatott eszközleltár A rendszer célja, hogy a Felhasználó tárgyi eszköz, kiemelten infokommunikációs eszköz, leltározási folyamatát támogassa, azt gyorsan, könnyen és hibamentesen
1. A rendszer célja RFID-val támogatott eszközleltár A rendszer célja, hogy a Felhasználó tárgyi eszköz, kiemelten infokommunikációs eszköz, leltározási folyamatát támogassa, azt gyorsan, könnyen és hibamentesen
LOKÁLIS IONOSZFÉRA MODELLEZÉS ÉS ALKALMAZÁSA A GNSS HELYMEGHATÁROZÁSBAN
 LOKÁLIS IONOSZFÉRA MODELLEZÉS ÉS ALKALMAZÁSA A GNSS HELYMEGHATÁROZÁSBAN Juni Ildikó Budapesti Műszaki és Gazdaságtudományi Egyetem BSc IV. évfolyam Konzulens: Dr. Rózsa Szabolcs MFTT 29. Vándorgyűlés,
LOKÁLIS IONOSZFÉRA MODELLEZÉS ÉS ALKALMAZÁSA A GNSS HELYMEGHATÁROZÁSBAN Juni Ildikó Budapesti Műszaki és Gazdaságtudományi Egyetem BSc IV. évfolyam Konzulens: Dr. Rózsa Szabolcs MFTT 29. Vándorgyűlés,
GNSS Modernizáció. Horváth Tamás FÖMI Kozmikus Geodéziai Obszervatórium Penc. Tea előadás, 2006. június 1., Penc
 1 GNSS Modernizáció Horváth Tamás FÖMI Kozmikus Geodéziai Obszervatórium Penc Tea előadás, 2006. június 1., Penc Tartalom GPS GLONASS Galileo 2 GPS Block IIR Block IIA Block IIF 3 A GPS pontossága GPS
1 GNSS Modernizáció Horváth Tamás FÖMI Kozmikus Geodéziai Obszervatórium Penc Tea előadás, 2006. június 1., Penc Tartalom GPS GLONASS Galileo 2 GPS Block IIR Block IIA Block IIF 3 A GPS pontossága GPS
Rallyinfo.hu - GPS rendszer működésének technikai leírása V1
 Rallyinfo.hu - GPS rendszer működésének technikai leírása V1 1. ábra: GPS doboz Méretei: 115x90x55mm Súlya: 340g + 2db csőbilincs 110g GPS mérés általános működési elve: A GPS egy fejlett helymeghatározó
Rallyinfo.hu - GPS rendszer működésének technikai leírása V1 1. ábra: GPS doboz Méretei: 115x90x55mm Súlya: 340g + 2db csőbilincs 110g GPS mérés általános működési elve: A GPS egy fejlett helymeghatározó
Topográfia 2. Vetületi alapfogalmak Mélykúti, Gábor
 Topográfia 2. Vetületi alapfogalmak Mélykúti, Gábor Topográfia 2. : Vetületi alapfogalmak Mélykúti, Gábor Lektor : Alabér, László Ez a modul a TÁMOP - 4.1.2-08/1/A-2009-0027 Tananyagfejlesztéssel a GEO-ért
Topográfia 2. Vetületi alapfogalmak Mélykúti, Gábor Topográfia 2. : Vetületi alapfogalmak Mélykúti, Gábor Lektor : Alabér, László Ez a modul a TÁMOP - 4.1.2-08/1/A-2009-0027 Tananyagfejlesztéssel a GEO-ért
Intelligens közlekedési rendszerek (ITS)
") Budapesti Műszaki és Gazdaságtudományi Egyetem Közlekedésüzemi és Közlekedésgazdasági Tanszék Intelligens közlekedési rendszerek (ITS) Térinformatika (GIS) alkalmazása a közlekedésben Adatgyűjtés Dr. Juhász
Budapesti Műszaki és Gazdaságtudományi Egyetem Közlekedésüzemi és Közlekedésgazdasági Tanszék Intelligens közlekedési rendszerek (ITS) Térinformatika (GIS) alkalmazása a közlekedésben Adatgyűjtés Dr. Juhász
A FÖMI-GNSSnet.hu szolgáltatás, GNSS adatok feldolgozásának kérdései
 A FÖMI-GNSSnet.hu szolgáltatás, GNSS adatok feldolgozásának kérdései Földmérési és Távérzékelési Intézet GNSS Szolgáltató Központ Tartalom A GNSSnet.hu szolgáltatás Állomások, kommunikáció Központi feldolgozás
A FÖMI-GNSSnet.hu szolgáltatás, GNSS adatok feldolgozásának kérdései Földmérési és Távérzékelési Intézet GNSS Szolgáltató Központ Tartalom A GNSSnet.hu szolgáltatás Állomások, kommunikáció Központi feldolgozás