ÉRZÉKELŐK ÉS BEAVATKOZÓK I. GY1. 32-BITES MIKROSZÁMÍTÓGÉPEK
|
|
|
- László Dobos
- 5 évvel ezelőtt
- Látták:
Átírás


1 ÉRZÉKELŐK ÉS BEAVATKOZÓK I. GY1. 32-BITES MIKROSZÁMÍTÓGÉPEK Dr. Soumelidis Alexandros BME KÖZLEKEDÉSMÉRNÖKI ÉS JÁRMŰMÉRNÖKI KAR /2017/INTFIN SZÁMÚ EMMI ÁLTAL TÁMOGATOTT TANANYAG
 alkalmazása: ARM. Miért ARM? Ma a legelterjedtebb mikroszámítógép architektúra.")
2 Mivel foglalkozunk? A beágyazott számítástechnika alkalmazása mechatronikai feladatok megoldására. PROGRAM- MEMÓRIA CPU ADAT- MEMÓRIA P 32-bites, korszerű architektúrájú, RISC mikrovezérlők (mikroszámítógépek) alkalmazása: ARM. Miért ARM? Ma a legelterjedtebb mikroszámítógép architektúra. Minden jelentős félvezetőgyártó cég gyárt ARM alapú mikrovezérlőket TI, NXP, Freescale, ST, Infineon, Ára összemérhető a 8-bites mikrovezérlők árával. Teljesítménye, képességei messze meghaladják a 8-bites mikrovezérlőkét. 2
3 ARM architektúrájú processzorok ARM Advanced RISC Machine RISC Reduced Instruction Set Computing 32 / 64 bites processzor architektúrák sorozata, amelyet a brit ARM Holdings cég fejleszti 1983 óta. Az egyes architektúrák licencét félvezető gyártó cégek megvásárolhatják, és beépíthetik termékeikbe (Intellectual Property IP). Ma a legelterjedtebb mikrovezérlő / mikroszámítógép architektúrák. Számtalan gyártó, pl. TI, NXP, ST, Samsung, Toshiba, NEC, Fijitsu, stb ig 100 milliárd db ARM processzor készült 3

4 ARM architektúra Történelmi architektúrák: ARM1, ARM2, ARM3, ARM7, ARM 9, ARM11 Ma: ARM Cortex cortex = kéreg (utalás az agykéregre) ARM Cortex-M: kis méret, kis fogyasztás ARM Cortex-R: gyors reagálás, kis válaszidő, real-time alkalmazásokhoz ARM Cortex A: nagy teljesítmény, operációs rendszerek kiszolgálására SecureCore: biztonsági alkalmazásokhoz 4

5 ARM szoftver-fejlesztés Cortex Microcontroller System Interface Standard 5

6 CMSIS CMSIS komponensek: CMSIS-CORE: Consistent system startup and peripheral access. CMSIS-RTOS: Deterministic Real-Time Software Execution. CMSIS-DSP: Fast implementation of digital signal processing. CMSIS-Driver: Generic peripheral interfaces for middleware and application code. CMSIS-Pack: Easy access to reusable software components. CMSIS-SVD: Consistent view to device and peripherals System View Description format. CMSIS-DAP: Connectivity to low-cost evaluation hardware Debug Access Port. 6


")

 Bárki")
7 STM32 ARM Cortex Az ST Microelectronics ARM Cortex mikrovezérlőivel foglalkozunk részletesebben. ST Microelectronics: Európai (francia-olasz alapítású) multinacionális cég, elektronika- és félvezető gyártó. Miért ezt választottuk? (más előnyei mellett) Bárki számára elérhető, jól használható HW/SW fejlesztő- és prototyping eszközök. 7

8 STM32 ARM Cortex ARM Cortex M0 M0+ M3 M4 M7 8
9 STM32 ARM Cortex F0 F1 F2 F3 F4 F7 H7 L0 L1 L4 ARM Cortex -M0 48 MHz ARM Cortex -M3 (DSP + FPU) 72 MHz ARM Cortex -M3 120 MHz ARM Cortex -M4 (DSP + FPU) 72 MHz ARM Cortex -M4 (DSP + FPU) max. 180 MHz ARM Cortex -M7 (FPU) 216 MHz ARM Cortex -M7 (FPU64) 400 MHz ARM Cortex -M0+ low power - 32 MHz ARM Cortex -M3 low power 32 MHz ARM Cortex -M4 (DSP + FPU) low power 80 MHz FPU Floating Point Unit lebegőpontos aritmetika DSP Digital Signal Processing digitális jelfeldolgozási támogatás 9


10 STM32 System Workbench Ingyenes szoftver fejlesztési környezet, Eclipse alapú, C/C++ prog. nyelv ( 10

11 STM32Cube HAL: Hardware Abstraction Layer a hardware komponensek egységes kezelését megvalósító réteg LL: Low Layer APIs alacsony szintű perifériakezelés egyes perifériákra Middleware components: RTOS, USB, TCP/IP, grafika 11
12 STM32Cube Teljes ANSI-C konformitás MISRA-C 2004 konformitás (MISRA - Motor Industry Software Reliability Association) GammaTech CodeSonar statikus analízis eszközzel (SAST) ellenőrzött szoftver Eljárások, specifikus adatszerkezetek a teljes I/O és perifériarendszer kezelésére Eljárás-könyvtárak, pl. digitális jelfeldolgozási (DSP) eljárások, grafikus eljárások (STemWin ST, SEGGER) Open-source TCP/IP stack, FAT fájlrendszer USB Host és Device könyvtár (ST) Érintő-érzékelő kezelési eljárások FreeRTOS valós idejű operációs rendszer opcionális alkalmazása Példák, sablonok (template) a programírás megkönnyítésére 12

13 STM32CubeMX 13
14 STM32CubeMX 14
15 STM32CubeMX 15
16 STM32CubeMX 16


17 STM32 ARM Cortex M4 Példaként az STM32F401xE processzort tanulmányozzuk több változatban kapható Nucleo-64 panel STM32F401RE processzorral LQFP64 tokozás 84 MHz órajel 512 kb flash, 96 kb RAM FPU + DSP 6 16-bites Timer 2 32-bites Timer bites ADC 50 I/O vonal 3 I 2 C, 3 SPI, 2 I 2 S 1 OTG FS USB 3 USART 1 SDIO interfész 17
18 STM32 ARM Cortex M4 STM32F401xE FPU JTAG SW ETM MPU NVIC AHB APB DMA FIFO RCC PLL RTC WDG PWR POR PDR BOR PVD CRC Floating Point Unit Joint Test Action Group Serial Wire Embedded Trace Macrocell TM Memory Protection Unit Nested Vectored Interrupt Controller Advanced High-Performance Bus Advanced Peripheral Bus Direct Memory Access First-In-First-Out Reset & Clock Controller Phase-Locked Loop (fáziszárt hurok) Real-Time Clock Watchdog Power controller Power-On Reset Power-Down Reset Brownout Reset Programmable Voltage Detector Cyclic Redundancy Check 18
19 STM32 ARM Cortex M4 STM32F401xE GPIO TIM SPI USB OTG FS SDIO ADC USB OTG FS PHY General Purpose Input/Output Timer Serial Peripheral interface Universal Serial Bus On-The-Go* Universal synchronous/asynchronous receiver/transmitter Secure Digital input/output interface Analog-to-digital converter Universal Serial Bus On-The-Go Full Speed Physical layer * USB OTG periféria: HOST/DEVICE szerepet működés közben (on the fly) képes váltani 19
20 STM32 ARM Cortex M4 Busz-mátrix I-bus: instruction bus D-bus: data bus S-bus: system bus DMA_P: DMA peripheral bus DMA_MEM: DMA memory bus AHB: Advanced High- Performance Bus APB: Advanced Peripheral Bus 20
21 STM32 ARM Cortex M4 Regiszterek R0-R12 SP (R13) MSP PSP LR (R14) PC (R15) PSR PRIMASK FAULTMASK BASEPRI CONTROL Általános célú regisztrerek Stack Pointer Main Stack Pointer Process Stack Pointer Link Register Program Counter Program Status Register Priority mask register Fault mask register Base priority mask register Control register 21
22 STM32 ARM Cortex M4 Memória térkép Little-endian formátum: Az alacsonyabb helyiértékű byte-ok helyezkednek el kisebb címeken 22
23 STM32 ARM Cortex M4 Bit band A periféria regiszterek minden egyes bitjének teljes (32-bites) szóra leképezése: A címtartomány két 1 MB-os területének leképezése egy-egy 32 MB-os RAM területre - Minden egyes bit függetlenül a többitől állítható, nincs szükség Read-Modify-Write műveletkombinációra. 23
24 STM32 ARM Cortex M4 Periféria elérés: memóriába ágyazott Minden perifériához tartozik egy memóriaterület, amely tartalmazza a periféria regisztereit. Periféria regiszterek: Parancs (command) Állapot (status) Adat (data) Funkciók: Alaphelyzetbe állítás Működési módok Szinkronizáció Adat írás / olvasás 24
25 STM32 ARM Cortex M4 GPIO Input Output Analog Input / Output Alternate function Low speed Medium speed Fast speed High speed PP push-pull OD open-drain Disabled PU pull up PD pull-down ST Schmitt-triggered 25

26 STM32 ARM Cortex M4 A GPIO port-okhoz tartozó regiszterek 0x4002 címtől: GPIO port mode register 26

27 STM32 ARM Cortex M4 GPIO port output type register output speed register 27

28 STM32 ARM Cortex M4 GPIO port pull-up/pull-down register input data register output data register bit set/reset register 28

29 STM32 ARM Cortex M4 GPIO port configuration lock register GPIO alternate function low register GPIO alternate function high register GPIO port-ok: GPIOA, GPIOB, GPIOC és GPIOH az STM32F401RE mikrovezérlőn, GPIOA K más F4 családhoz tartozó mikrovezérlőkön GPIO port-ok működtetése a GPIO regiszterek programozásával: Beállítások (kezelési mód, üzemmód, stb.) Port-bitek írása / olvasása, módosítása Külső megszakítások kezelése 29
30 Programozás: STM32Cube HAL: Hardware Abstraction Layer a hardware komponensek egységes kezelését megvalósító réteg LL: Low Layer APIs alacsony szintű perifériakezelés egyes perifériákra Middleware components: RTOS, USB, TCP/IP, grafika 30
31 STM32Cube példa: GPIO programozás HAL: Hardware Abstraction Layer LL: Low Layer APIs Adatstruktúrák: GPIO_InitTypeDef uint32_t Pin uint32_t Mode uint32_t Pull uint32_t Speed uint32_t Alternate LL_GPIO_InitTypeDef uint32_t Pin uint32_t Mode uint32_t Speed uint32_t OutputType uint32_t Pull uint32_t Alternate A konfigurációs regiszterekkel konform adatszerkezetek. 31
32 STM32Cube példa: GPIO programozás HAL: Pin GPIO_PIN_0 GPIO_PIN_1 GPIO_PIN_2 GPIO_PIN_3 GPIO_PIN_4 GPIO_PIN_5 GPIO_PIN_6 GPIO_PIN_7 GPIO_PIN_8 GPIO_PIN_9 GPIO_PIN_10 GPIO_PIN_11 GPIO_PIN_12 GPIO_PIN_13 GPIO_PIN_14 GPIO_PIN_15 GPIO_PIN_All LL: LL_GPIO_PIN_0 Select pin 0 LL_GPIO_PIN_1 Select pin 1 LL_GPIO_PIN_2 Select pin 2 LL_GPIO_PIN_3 Select pin 3 LL_GPIO_PIN_4 Select pin 4 LL_GPIO_PIN_5 Select pin 5 LL_GPIO_PIN_6 Select pin 6 LL_GPIO_PIN_7 Select pin 7 LL_GPIO_PIN_8 Select pin 8 LL_GPIO_PIN_9 Select pin 9 LL_GPIO_PIN_10 Select pin 10 LL_GPIO_PIN_11 Select pin 11 LL_GPIO_PIN_12 Select pin 12 LL_GPIO_PIN_13 Select pin 13 LL_GPIO_PIN_14 Select pin 14 LL_GPIO_PIN_15 Select pin 15 LL_GPIO_PIN_ALL Select all pins 32
33 STM32Cube példa: GPIO programozás HAL: Pull GPIO_NOPULL GPIO_PULLUP GPIO_PULLDOWN LL: LL_GPIO_PULL_NO LL_GPIO_PULL_UP LL_GPIO_PULL_DOWN No Pull-up or Pull-down activation Pull-up activation Pull-down activation Speed GPIO_SPEED_FREQ_LOW GPIO_SPEED_FREQ_MEDIUM GPIO_SPEED_FREQ_HIGH GPIO_SPEED_FREQ_VERY_HIGH LL_GPIO_SPEED_FREQ_LOW LL_GPIO_SPEED_FREQ_MEDIUM LL_GPIO_SPEED_FREQ_HIGH LL_GPIO_SPEED_FREQ_VERY_HIGH LOW MEDIUM HIGH VERY_HIGH IO works at 2 MHz range 12,5 MHz to 50 MHz range 25 MHz to 100 MHz range 50 MHz to 200 MHz 33
34 STM32Cube példa: GPIO programozás HAL: Mode GPIO_MODE_INPUT Input Floating Mode GPIO_MODE_OUTPUT_PP Output Push Pull Mode GPIO_MODE_OUTPUT_OD Output Open Drain Mode GPIO_MODE_AF_PP Alternate Function Push Pull Mode GPIO_MODE_AF_OD Alternate Function Open Drain Mode GPIO_MODE_ANALOG Analog Mode GPIO_MODE_IT_RISING External Interrupt Mode with Rising edge trigger detection GPIO_MODE_IT_FALLING External Interrupt Mode with Falling edge trigger detection GPIO_MODE_IT_RISING_FALLING External Interrupt Mode with Rising/Falling edge trigger detection GPIO_MODE_EVT_RISING External Event Mode with Rising edge trigger detection GPIO_MODE_EVT_FALLING External Event Mode with Falling edge trigger detection GPIO_MODE_EVT_RISING_FALLING External Event Mode with Rising/Falling edge trigger detection 34
35 STM32Cube példa: GPIO programozás LL: Mode LL_GPIO_MODE_INPUT LL_GPIO_MODE_OUTPUT LL_GPIO_MODE_ALTERNATE LL_GPIO_MODE_ANALOG Select input mode Select output mode Select alternate function mode Select analog mode OutputType LL_GPIO_OUTPUT_PUSHPULL LL_GPIO_OUTPUT_OPENDRAIN Select push-pull as output type Select open-drain as output type 35
36 36 STM32Cube példa: GPIO programozás HAL: Alternate GPIO_AF0_RTC_50Hz GPIO_AF0_MCO GPIO_AF0_TAMPER GPIO_AF0_SWJ GPIO_AF0_TRACE GPIO_AF1_TIM1 GPIO_AF1_TIM2 GPIO_AF2_TIM3 GPIO_AF2_TIM4 GPIO_AF2_TIM5 GPIO_AF3_TIM8 GPIO_AF3_TIM9 GPIO_AF3_TIM10 GPIO_AF3_TIM11 GPIO_AF4_I2C1 GPIO_AF4_I2C2 GPIO_AF4_I2C3 GPIO_AF5_SPI1 GPIO_AF5_SPI2 GPIO_AF5_SPI3 GPIO_AF5_SPI4 GPIO_AF5_SPI5 GPIO_AF5_SPI6 GPIO_AF5_I2S3ext GPIO_AF6_SPI3 GPIO_AF6_I2S2ext GPIO_AF6_SAI1 GPIO_AF7_USART1 GPIO_AF7_USART2 GPIO_AF7_USART3 GPIO_AF7_I2S3ext GPIO_AF8_UART4 GPIO_AF8_USART6 GPIO_AF8_UART7 GPIO_AF8_UART8 GPIO_AF9_CAN1 GPIO_AF9_CAN2 GPIO_AF9_TIM12 GPIO_AF9_TIM13 GPIO_AF9_TIM14 GPIO_AF9_LTDC GPIO_AF9_QSPI GPIO_AF10_OTG_FS GPIO_AF10_OTG_HS GPIO_AF10_QSPI GPIO_AF11_ETH GPIO_AF12_FMC GPIO_AF12_OTG_HS_FS GPIO_AF12_SDIO GPIO_AF13_DCMI GPIO_AF13_DSI GPIO_AF14_LTDC GPIO_AF15_EVENTOUT
37 STM32Cube példa: GPIO programozás LL: Alternate LL_GPIO_AF_0 Select alternate function 0 LL_GPIO_AF_1 Select alternate function 1 LL_GPIO_AF_2 Select alternate function 2 LL_GPIO_AF_3 Select alternate function 3 LL_GPIO_AF_4 Select alternate function 4 LL_GPIO_AF_5 Select alternate function 5 LL_GPIO_AF_6 Select alternate function 6 LL_GPIO_AF_7 Select alternate function 7 LL_GPIO_AF_8 Select alternate function 8 LL_GPIO_AF_9 Select alternate function 9 LL_GPIO_AF_10 Select alternate function 10 LL_GPIO_AF_11 Select alternate function 11 LL_GPIO_AF_12 Select alternate function 12 LL_GPIO_AF_13 Select alternate function 13 LL_GPIO_AF_14 Select alternate function 14 LL_GPIO_AF_15 Select alternate function 15 37
38 STM32Cube példa: GPIO programozás Függvények HAL: HAL_GPIO_Init HAL_GPIO_DeInit HAL_GPIO_ReadPin HAL_GPIO_WritePin HAL_GPIO_TogglePin HAL_GPIO_LockPin HAL_GPIO_EXTI_IRQHandler HAL_GPIO_EXTI_Callback LL: LL_GPIO_SetPinMode LL_GPIO_GetPinMode LL_GPIO_SetPinOutputType LL_GPIO_GetPinOutputType LL_GPIO_SetPinSpeed LL_GPIO_GetPinSpeed LL_GPIO_SetPinPull LL_GPIO_GetPinPull LL_GPIO_SetAFPin_0_7 LL_GPIO_GetAFPin_0_7 LL_GPIO_SetAFPin_8_15 LL_GPIO_GetAFPin_8_15 LL_GPIO_LockPin LL_GPIO_IsPinLocked LL_GPIO_IsAnyPinLocked LL_GPIO_ReadInputPort LL_GPIO_IsInputPinSet LL_GPIO_WriteOutputPort LL_GPIO_ReadOutputPort LL_GPIO_IsOutputPinSet LL_GPIO_SetOutputPin LL_GPIO_ResetOutputPin LL_GPIO_TogglePin LL_GPIO_DeInit LL_GPIO_Init LL_GPIO_StructInit 38
39 STM32Cube: GPIO programozás HAL függvény példa HAL_GPIO_WritePin void HAL_GPIO_WritePin (GPIO_TypeDef * GPIOx, uint16_t GPIO_Pin, GPIO_PinState PinState) Function description Parameters Return values Notes Sets or clears the selected data port bit. GPIOx: where x can be (A..K) to select the GPIO peripheral for STM32F429X device or x can be (A..I) to select the GPIO peripheral for STM32F40XX and STM32F427X devices. GPIO_Pin: specifies the port bit to be written. This parameter can be one of GPIO_PIN_x where x can be (0..15). PinState: specifies the value to be written to the selected bit. This parameter can be one of the GPIO_PinState enum values: GPIO_PIN_RESET: to clear the port pin GPIO_PIN_SET: to set the port pin None: This function uses GPIOx_BSRR register to allow atomic read/modify accesses. In this way, there is no risk of an IRQ occurring between the read and the modify access. 39

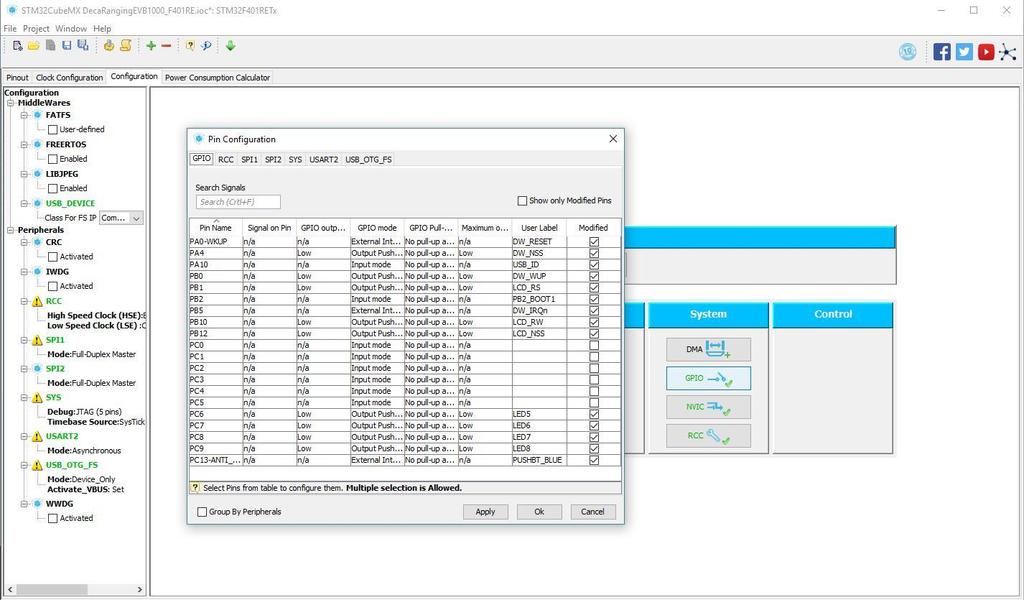
40 STM32CubeMX: GPIO konfigurálás 40
41 STM32CubeMX: GPIO konfigurálás 41

42 STM32CubeMX: GPIO konfigurálás 42

43 STM32CubeMX: GPIO konfigurálás GPIO_Output GPIO_Input GPIO_EXTIn 43
44 STM32 ARM Cortex M4: NVIC Nested vectored interrupt controller (NVIC) 52 maszkolható megszakítás 1 nem maszkolható megszakítás (NMI) 16 programozható prioritási szint A prioritási szinteken belül al-prioritások adhatók meg Gyors, kis lappangási idejű (latancy) megszakítás kezelés A megszakítási eljárások (ISR-ek) közönséges szubrutinok Megszakítás források: Belső erőforrások (FPU, MPU, PWR, WDG, CRC, stb.) Belső perifériák Bemeneti vonalakra kapcsolt külső perifériák (EXTI) 44

45 STM32 ARM Cortex M4: NVIC STM32CubeMX Configuration NVIC Configuration Példa: 16 prioritási szint alprioritások nélkül Példa: GPIO_EXTIn megszakítás Engedélyezés/tiltás - prioritás 45
46 STM32 ARM Cortex M4 Irodalom ARM Cortex -M for Beginners, White Paper, ARM, Joseph Yiu, September 2016 ARM Cortex -M4 Processor Technical Reference Manual, Rev. r0p1, ARM, 2015 STM32F401xB/C and STM32F401xD/E Reference manual, RM0368, ST Microelectronics STM32F3, STM32F4 and STM32L4 Series Programming manual, PM0214, ST Microel. Description of STM32F4 HAL and LL drivers User Manual, UM1725, ST Microel. STM32F401xD STM32F401xE Datasheet, ST Microelectronics 46

47 BUDAPESTI MŰSZAKI ÉS GAZDASÁGTUDOMÁNYI EGYETEM Dr. Soumelidis Alexandros BME KÖZLEKEDÉSMÉRNÖKI ÉS JÁRMŰMÉRNÖKI KAR /2017/INTFIN SZÁMÚ EMMI ÁLTAL TÁMOGATOTT TANANYAG
Érzékelők és beavatkozók I.
 Érzékelők és beavatkozók I. Mikrovezérlők, mikroszámítógépek: 32-bites ARM Cortex architektúra c. egyetemi tanár - 1 - ARM ARM architektúrájú processzorok ARM Advanced RISC Machine RISC Reduced Instruction
Érzékelők és beavatkozók I. Mikrovezérlők, mikroszámítógépek: 32-bites ARM Cortex architektúra c. egyetemi tanár - 1 - ARM ARM architektúrájú processzorok ARM Advanced RISC Machine RISC Reduced Instruction
ÉRZÉKELŐK ÉS BEAVATKOZÓK I. GY1.1 SENSACT0 PÉLDAPROGRAM
 ÉRZÉKELŐK ÉS BEAVATKOZÓK I. GY1.1 SENSACT0 PÉLDAPROGRAM Dr. Soumelidis Alexandros 2018.09.06. BME KÖZLEKEDÉSMÉRNÖKI ÉS JÁRMŰMÉRNÖKI KAR 32708-2/2017/INTFIN SZÁMÚ EMMI ÁLTAL TÁMOGATOTT TANANYAG SensAct0
ÉRZÉKELŐK ÉS BEAVATKOZÓK I. GY1.1 SENSACT0 PÉLDAPROGRAM Dr. Soumelidis Alexandros 2018.09.06. BME KÖZLEKEDÉSMÉRNÖKI ÉS JÁRMŰMÉRNÖKI KAR 32708-2/2017/INTFIN SZÁMÚ EMMI ÁLTAL TÁMOGATOTT TANANYAG SensAct0
ARM processzorok felépítése
 ARM processzorok felépítése Az ARM processzorok több családra bontható közösséget alkotnak. Az Cortex-A sorozatú processzorok, ill. az azokból felépülő mikrokontrollerek a high-end kategóriájú, nagy teljesítményű
ARM processzorok felépítése Az ARM processzorok több családra bontható közösséget alkotnak. Az Cortex-A sorozatú processzorok, ill. az azokból felépülő mikrokontrollerek a high-end kategóriájú, nagy teljesítményű
ARM (Advanced RISC Machine)
") POWERED ARM ARM (Advanced RISC Machine) 1983 kisérleti projekt Acorn Computers Ltd., 1985 ARM1 fejlesztői minták, 1985 ARM2 32 bites adatbusz 64MB memória címezhető, 1989 ARM3 4K cache, 1990 ARM név változtatás
POWERED ARM ARM (Advanced RISC Machine) 1983 kisérleti projekt Acorn Computers Ltd., 1985 ARM1 fejlesztői minták, 1985 ARM2 32 bites adatbusz 64MB memória címezhető, 1989 ARM3 4K cache, 1990 ARM név változtatás
Scherer Balázs: Mikrovezérlők fejlődési trendjei
 Budapesti Műszaki és Gazdaságtudományi Egyetem Méréstechnika és Információs Rendszerek Tanszék Scherer Balázs: Mikrovezérlők fejlődési trendjei 2009. Budapesti Műszaki és Gazdaságtudományi Egyetem, Méréstechnika
Budapesti Műszaki és Gazdaságtudományi Egyetem Méréstechnika és Információs Rendszerek Tanszék Scherer Balázs: Mikrovezérlők fejlődési trendjei 2009. Budapesti Műszaki és Gazdaságtudományi Egyetem, Méréstechnika
ARM Cortex magú mikrovezérlők
 ARM Cortex magú mikrovezérlők 6. NVIC Scherer Balázs Budapest University of Technology and Economics Department of Measurement and Information Systems BME-MIT 2017 ARM7, ARM9 megszakítás kezelés ARM7,
ARM Cortex magú mikrovezérlők 6. NVIC Scherer Balázs Budapest University of Technology and Economics Department of Measurement and Information Systems BME-MIT 2017 ARM7, ARM9 megszakítás kezelés ARM7,
ARM Cortex magú mikrovezérlők
 ARM Cortex magú mikrovezérlők 3. Cortex-M0, M4, M7 Scherer Balázs Budapest University of Technology and Economics Department of Measurement and Information Systems BME-MIT 2018 32 bites trendek 2003-2017
ARM Cortex magú mikrovezérlők 3. Cortex-M0, M4, M7 Scherer Balázs Budapest University of Technology and Economics Department of Measurement and Information Systems BME-MIT 2018 32 bites trendek 2003-2017
Scherer Balázs: Mikrovezérlık fejlıdési trendjei
 Budapesti Mőszaki és Gazdaságtudományi Egyetem Méréstechnika és Információs Rendszerek Tanszék Scherer Balázs: Mikrovezérlık fejlıdési trendjei 2009. Budapesti Mőszaki és Gazdaságtudományi Egyetem, Méréstechnika
Budapesti Mőszaki és Gazdaságtudományi Egyetem Méréstechnika és Információs Rendszerek Tanszék Scherer Balázs: Mikrovezérlık fejlıdési trendjei 2009. Budapesti Mőszaki és Gazdaságtudományi Egyetem, Méréstechnika
Mechatronika és mikroszámítógépek. 2018/2019 I. félév. Külső megszakítások
 Mechatronika és mikroszámítógépek 2018/2019 I. félév Külső megszakítások Megszakítás, Interrupt A megszakítás egy olyan esemény, vagy feltétel teljesülése, amely felfüggeszti a program futását, a vezérlést
Mechatronika és mikroszámítógépek 2018/2019 I. félév Külső megszakítások Megszakítás, Interrupt A megszakítás egy olyan esemény, vagy feltétel teljesülése, amely felfüggeszti a program futását, a vezérlést
Dr. Schuster György szeptember 27.
 Real-time operációs rendszerek RTOS 2012. szeptember 27. Általános ismérvek: ARM Cortex M3 mag 80 MHz órajel frekvencia (50 MHz flash-ből) 256 kbájt flash 96 kbájt RAM ARM Cortex Sys Tick Timer belső ROM
Real-time operációs rendszerek RTOS 2012. szeptember 27. Általános ismérvek: ARM Cortex M3 mag 80 MHz órajel frekvencia (50 MHz flash-ből) 256 kbájt flash 96 kbájt RAM ARM Cortex Sys Tick Timer belső ROM
ATMEL ATMEGA MIKROVEZÉRLŐ-CSALÁD
 Misák Sándor ATMEL ATMEGA MIKROVEZÉRLŐ-CSALÁD Nanoelektronikai és Nanotechnológiai Részleg DE TTK v.0.1 (2007.02.13.) 1. előadás 1. Általános ismeretek. 2. Sajátos tulajdonságok. 3. A processzor jellemzői.
Misák Sándor ATMEL ATMEGA MIKROVEZÉRLŐ-CSALÁD Nanoelektronikai és Nanotechnológiai Részleg DE TTK v.0.1 (2007.02.13.) 1. előadás 1. Általános ismeretek. 2. Sajátos tulajdonságok. 3. A processzor jellemzői.
Nagyteljesítményű mikrovezérlők
 Nagyteljesítményű mikrovezérlők Tárgykövetelmények, tematika Scherer Balázs Budapest University of Technology and Economics Department of Measurement and Information Systems BME-MIT 2015 Lehetőségek: o
Nagyteljesítményű mikrovezérlők Tárgykövetelmények, tematika Scherer Balázs Budapest University of Technology and Economics Department of Measurement and Information Systems BME-MIT 2015 Lehetőségek: o
A Texas Instruments MSP430 mikrovezérlőcsalád
 1.4.1. A Texas Instruments MSP430 mikrovezérlőcsalád A Texas Instruments MSP430-as mikrovezérlői 16 bites RISC alapú, kevert jelű (mixed signal) processzorok, melyeket ultra kis fogyasztásra tervezték.
1.4.1. A Texas Instruments MSP430 mikrovezérlőcsalád A Texas Instruments MSP430-as mikrovezérlői 16 bites RISC alapú, kevert jelű (mixed signal) processzorok, melyeket ultra kis fogyasztásra tervezték.
Autóipari beágyazott rendszerek CAN hardver
 Scherer Balázs, Tóth Csaba: Autóipari beágyazott rendszerek CAN hardver Előadásvázlat Kézirat Csak belső használatra! 2012.02.19. SchB, TCs BME MIT 2012. Csak belső használatra! Autóipari beágyazott rendszerek
Scherer Balázs, Tóth Csaba: Autóipari beágyazott rendszerek CAN hardver Előadásvázlat Kézirat Csak belső használatra! 2012.02.19. SchB, TCs BME MIT 2012. Csak belső használatra! Autóipari beágyazott rendszerek
Mérő- és vezérlőberendezés megvalósítása ARM alapú mikrovezérlővel és Linux-szal
 Mérő- és vezérlőberendezés megvalósítása ARM alapú mikrovezérlővel és Linux-szal Fuszenecker Róbert Budapesti Műszaki Főiskola Kandó Kálmán Műszaki Főiskolai Kar 2007. július 18. A mérőberendezés felhasználási
Mérő- és vezérlőberendezés megvalósítása ARM alapú mikrovezérlővel és Linux-szal Fuszenecker Róbert Budapesti Műszaki Főiskola Kandó Kálmán Műszaki Főiskolai Kar 2007. július 18. A mérőberendezés felhasználási
ARM Cortex magú mikrovezérlők
 ARM Cortex magú mikrovezérlők Tárgykövetelmények, tematika Scherer Balázs Budapest University of Technology and Economics Department of Measurement and Information Systems BME-MIT 2016 Lehetőségek: o Hardware
ARM Cortex magú mikrovezérlők Tárgykövetelmények, tematika Scherer Balázs Budapest University of Technology and Economics Department of Measurement and Information Systems BME-MIT 2016 Lehetőségek: o Hardware
Programmable Chip. System on a Chip. Lazányi János. Tartalom. A hagyományos technológia SoC / PSoC SoPC Fejlesztés menete Mi van az FPGA-ban?
 System on a Chip Programmable Chip Lazányi János 2010 Tartalom A hagyományos technológia SoC / PSoC SoPC Fejlesztés menete Mi van az FPGA-ban? Page 2 1 A hagyományos technológia Elmosódó határvonalak ASIC
System on a Chip Programmable Chip Lazányi János 2010 Tartalom A hagyományos technológia SoC / PSoC SoPC Fejlesztés menete Mi van az FPGA-ban? Page 2 1 A hagyományos technológia Elmosódó határvonalak ASIC
Mikrorendszerek tervezése
 BUDAPESTI MŰSZAKI ÉS GAZDASÁGTUDOMÁNYI EGYETEM VILLAMOSMÉRNÖKI ÉS INFORMATIKAI KAR MÉRÉSTECHNIKA ÉS INFORMÁCIÓS RENDSZEREK TANSZÉK Mikrorendszerek tervezése Beágyazott rendszerek Fehér Béla Raikovich Tamás
BUDAPESTI MŰSZAKI ÉS GAZDASÁGTUDOMÁNYI EGYETEM VILLAMOSMÉRNÖKI ÉS INFORMATIKAI KAR MÉRÉSTECHNIKA ÉS INFORMÁCIÓS RENDSZEREK TANSZÉK Mikrorendszerek tervezése Beágyazott rendszerek Fehér Béla Raikovich Tamás
ARM Cortex magú mikrovezérlők. mbed
 ARM Cortex magú mikrovezérlők mbed Scherer Balázs Budapest University of Technology and Economics Department of Measurement and Information Systems BME-MIT 2016 MBED webes fejlesztőkörnyezet 2009-ben megjelent
ARM Cortex magú mikrovezérlők mbed Scherer Balázs Budapest University of Technology and Economics Department of Measurement and Information Systems BME-MIT 2016 MBED webes fejlesztőkörnyezet 2009-ben megjelent
Nagyteljesítményű mikrovezérlők
 Nagyteljesítményű mikrovezérlők 4. Cortex M0, M4, M7 Scherer Balázs Budapest University of Technology and Economics Department of Measurement and Information Systems BME-MIT 2015 ARM Cortex M (Mikrovezérlő)
Nagyteljesítményű mikrovezérlők 4. Cortex M0, M4, M7 Scherer Balázs Budapest University of Technology and Economics Department of Measurement and Information Systems BME-MIT 2015 ARM Cortex M (Mikrovezérlő)
TI TMDSEVM6472 rövid bemutatása
 6.6.1. Linux futtatása TMDSEVM6472 eszközön TI TMDSEVM6472 rövid bemutatása A TMDSEVM6472 az alábbi fő hardver paraméterekkel rendelkezik: 1db fix pontos, több magos (6 C64x+ mag) C6472 DSP 700MHz 256MB
6.6.1. Linux futtatása TMDSEVM6472 eszközön TI TMDSEVM6472 rövid bemutatása A TMDSEVM6472 az alábbi fő hardver paraméterekkel rendelkezik: 1db fix pontos, több magos (6 C64x+ mag) C6472 DSP 700MHz 256MB
Silabs STK3700, Simplicity Studio laborgyakorlat
 Silabs STK3700, Simplicity Studio laborgyakorlat Scherer Balázs Budapest University of Technology and Economics Department of Measurement and Information Systems BME-MIT 2016 Saját Firmware library Saját
Silabs STK3700, Simplicity Studio laborgyakorlat Scherer Balázs Budapest University of Technology and Economics Department of Measurement and Information Systems BME-MIT 2016 Saját Firmware library Saját
Nagyteljesítményű mikrovezérlők
 Nagyteljesítményű mikrovezérlők 7. NVIC Scherer Balázs Budapest University of Technology and Economics Department of Measurement and Information Systems BME-MIT 2015 ARM7, ARM9 megszakítás kezelés ARM7,
Nagyteljesítményű mikrovezérlők 7. NVIC Scherer Balázs Budapest University of Technology and Economics Department of Measurement and Information Systems BME-MIT 2015 ARM7, ARM9 megszakítás kezelés ARM7,
4.1.1. I 2 C, SPI, I 2 S, USB, PWM, UART, IrDA
 4.1.1. I 2 C, SPI, I 2 S, USB, PWM, UART, IrDA A címben található jelölések a mikrovezérlők kimentén megjelenő tipikus perifériák, típus jelzései. Mindegyikkel röviden foglalkozni fogunk a folytatásban.
4.1.1. I 2 C, SPI, I 2 S, USB, PWM, UART, IrDA A címben található jelölések a mikrovezérlők kimentén megjelenő tipikus perifériák, típus jelzései. Mindegyikkel röviden foglalkozni fogunk a folytatásban.
ARM Cortex magú mikrovezérlők
 ARM Cortex magú mikrovezérlők Tárgykövetelmények, tematika Scherer Balázs Budapest University of Technology and Economics Department of Measurement and Information Systems BME-MIT 2018 Házi feladat: kötelező
ARM Cortex magú mikrovezérlők Tárgykövetelmények, tematika Scherer Balázs Budapest University of Technology and Economics Department of Measurement and Information Systems BME-MIT 2018 Házi feladat: kötelező
Számítógépek felépítése
 Számítógépek felépítése Emil Vatai 2014-2015 Emil Vatai Számítógépek felépítése 2014-2015 1 / 14 Outline 1 Alap fogalmak Bit, Byte, Word 2 Számítógép részei A processzor részei Processzor architektúrák
Számítógépek felépítése Emil Vatai 2014-2015 Emil Vatai Számítógépek felépítése 2014-2015 1 / 14 Outline 1 Alap fogalmak Bit, Byte, Word 2 Számítógép részei A processzor részei Processzor architektúrák
Nagyteljesítményű mikrovezérlők Energiatakarékos üzemmódok
 Nagyteljesítményű mikrovezérlők Energiatakarékos üzemmódok Scherer Balázs Budapest University of Technology and Economics Department of Measurement and Information Systems BME-MIT 2015 Fogyasztás és energiatakarékos
Nagyteljesítményű mikrovezérlők Energiatakarékos üzemmódok Scherer Balázs Budapest University of Technology and Economics Department of Measurement and Information Systems BME-MIT 2015 Fogyasztás és energiatakarékos
Számítógép Architektúrák
 Perifériakezelés a PCI-ban és a PCI Express-ben Horváth Gábor 2017. február 14. Budapest docens BME Hálózati Rendszerek és Szolgáltatások Tanszék ghorvath@hit.bme.hu A PCI PCI = Peripheral Component Interfész,
Perifériakezelés a PCI-ban és a PCI Express-ben Horváth Gábor 2017. február 14. Budapest docens BME Hálózati Rendszerek és Szolgáltatások Tanszék ghorvath@hit.bme.hu A PCI PCI = Peripheral Component Interfész,
Számítógépek felépítése, alapfogalmak
 2. előadás Számítógépek felépítése, alapfogalmak Lovas Szilárd SZE MTK MSZT lovas.szilard@sze.hu B607 szoba Nem reprezentatív felmérés kinek van ilyen számítógépe? Nem reprezentatív felmérés kinek van
2. előadás Számítógépek felépítése, alapfogalmak Lovas Szilárd SZE MTK MSZT lovas.szilard@sze.hu B607 szoba Nem reprezentatív felmérés kinek van ilyen számítógépe? Nem reprezentatív felmérés kinek van
Számítógép Architektúrák
 Számítógép Architektúrák Perifériakezelés a PCI-ban és a PCI Express-ben 2015. március 9. Budapest Horváth Gábor docens BME Hálózati Rendszerek és Szolgáltatások Tanszék ghorvath@hit.bme.hu Tartalom A
Számítógép Architektúrák Perifériakezelés a PCI-ban és a PCI Express-ben 2015. március 9. Budapest Horváth Gábor docens BME Hálózati Rendszerek és Szolgáltatások Tanszék ghorvath@hit.bme.hu Tartalom A
Érzékelők és beavatkozók I.
 Érzékelők és beavatkozók I. Mikrovezérlők, mikroszámítógépek (hardver) c. egyetemi tanár - 1 - Mikrovezérlők (Microcontrollers) Teljes számítógép architektúra megvalósítása egy áramköri lapkán Egyszerű
Érzékelők és beavatkozók I. Mikrovezérlők, mikroszámítógépek (hardver) c. egyetemi tanár - 1 - Mikrovezérlők (Microcontrollers) Teljes számítógép architektúra megvalósítása egy áramköri lapkán Egyszerű
Perifériák hozzáadása a rendszerhez
 Perifériák hozzáadása a rendszerhez Intellectual Property (IP) katalógus: Az elérhető IP modulok listája Bal oldalon az IP Catalog fül Ingyenes IP modulok Fizetős IP modulok: korlátozások Időkorlátosan
Perifériák hozzáadása a rendszerhez Intellectual Property (IP) katalógus: Az elérhető IP modulok listája Bal oldalon az IP Catalog fül Ingyenes IP modulok Fizetős IP modulok: korlátozások Időkorlátosan
Mechatronika és mikroszámítógépek
 Mechatronika és mikroszámítógépek 2018/2019 I. félév Órajelek, időzítők, megszakítások (4. lab) Órajel Internal Oscillator Control Register (OSCICN 0xB2) Bit Symbol Leírás 7 MSCLKE Missing Clock enable
Mechatronika és mikroszámítógépek 2018/2019 I. félév Órajelek, időzítők, megszakítások (4. lab) Órajel Internal Oscillator Control Register (OSCICN 0xB2) Bit Symbol Leírás 7 MSCLKE Missing Clock enable
Bevitel-Kivitel. Eddig a számítógép agyáról volt szó. Szükség van eszközökre. Processzusok, memória, stb
 Input és Output 1 Bevitel-Kivitel Eddig a számítógép agyáról volt szó Processzusok, memória, stb Szükség van eszközökre Adat bevitel és kivitel a számitógépből, -be Perifériák 2 Perifériákcsoportosításá,
Input és Output 1 Bevitel-Kivitel Eddig a számítógép agyáról volt szó Processzusok, memória, stb Szükség van eszközökre Adat bevitel és kivitel a számitógépből, -be Perifériák 2 Perifériákcsoportosításá,
A Számítógépek hardver elemei
 Mechatronika, Optika és Gépészeti Informatika Tanszék Kovács Endre tud. Mts. A Számítógépek hardver elemei Korszerő perifériák és rendszercsatolásuk A µ processzoros rendszer regiszter modellje A µp gépi
Mechatronika, Optika és Gépészeti Informatika Tanszék Kovács Endre tud. Mts. A Számítógépek hardver elemei Korszerő perifériák és rendszercsatolásuk A µ processzoros rendszer regiszter modellje A µp gépi
ARM Cortex magú mikrovezérlők
 ARM Cortex magú mikrovezérlők 4. System Control block Scherer Balázs Budapest University of Technology and Economics Department of Measurement and Information Systems BME-MIT 2018 Az ARM7 magú vezérlők
ARM Cortex magú mikrovezérlők 4. System Control block Scherer Balázs Budapest University of Technology and Economics Department of Measurement and Information Systems BME-MIT 2018 Az ARM7 magú vezérlők
Nyíregyházi Egyetem Matematika és Informatika Intézete. Input/Output
 1 Input/Output 1. I/O műveletek hardveres háttere 2. I/O műveletek szoftveres háttere 3. Diszkek (lemezek) ------------------------------------------------ 4. Órák, Szöveges terminálok 5. GUI - Graphical
1 Input/Output 1. I/O műveletek hardveres háttere 2. I/O műveletek szoftveres háttere 3. Diszkek (lemezek) ------------------------------------------------ 4. Órák, Szöveges terminálok 5. GUI - Graphical
Laboratóriumi műszerek megvalósítása ARM alapú mikrovezérlővel és Linux-szal
 Laboratóriumi műszerek megvalósítása ARM alapú mikrovezérlővel és Linux-szal Fuszenecker Róbert Budapesti Műszaki Főiskola Kandó Kálmán Műszaki Főiskolai Kar 2007. október 17. Laboratóriumi berendezések
Laboratóriumi műszerek megvalósítása ARM alapú mikrovezérlővel és Linux-szal Fuszenecker Róbert Budapesti Műszaki Főiskola Kandó Kálmán Műszaki Főiskolai Kar 2007. október 17. Laboratóriumi berendezések
A Számítógépek felépítése, mőködési módjai
 Mechatronika, Optika és Gépészeti Informatika Tanszék Kovács Endre tud. Mts. A Számítógépek felépítése, mőködési módjai Mikroprocesszoros Rendszerek Felépítése Buszrendszer CPU OPERATÍV TÁR µ processzor
Mechatronika, Optika és Gépészeti Informatika Tanszék Kovács Endre tud. Mts. A Számítógépek felépítése, mőködési módjai Mikroprocesszoros Rendszerek Felépítése Buszrendszer CPU OPERATÍV TÁR µ processzor
ÖNÁLLÓ LABOR Mérésadatgyűjtő rendszer tervezése és implementációja
 ÖNÁLLÓ LABOR Mérésadatgyűjtő rendszer tervezése és implementációja Nagy Mihály Péter 1 Feladat ismertetése Általános célú (univerzális) digitális mérőműszer elkészítése Egy- vagy többcsatornás feszültségmérés
ÖNÁLLÓ LABOR Mérésadatgyűjtő rendszer tervezése és implementációja Nagy Mihály Péter 1 Feladat ismertetése Általános célú (univerzális) digitális mérőműszer elkészítése Egy- vagy többcsatornás feszültségmérés
Budapesti Műszaki- és Gazdaságtudományi Egyetem Villamosmérnöki és Informatikai Kar MIT. Nagyteljesítményű mikrovezérlők tantárgy [vimim342]
![Budapesti Műszaki- és Gazdaságtudományi Egyetem Villamosmérnöki és Informatikai Kar MIT. Nagyteljesítményű mikrovezérlők tantárgy [vimim342]](/thumbs/39/18932349.jpg "Budapesti Műszaki- és Gazdaságtudományi Egyetem Villamosmérnöki és Informatikai Kar MIT. Nagyteljesítményű mikrovezérlők tantárgy [vimim342]") Budapesti Műszaki- és Gazdaságtudományi Egyetem Villamosmérnöki és Informatikai Kar MIT Nagyteljesítményű mikrovezérlők tantárgy [vimim342] 8x8x8 LED Cube Készítette: Szikra István URLJRN Tartalomjegyzék
Budapesti Műszaki- és Gazdaságtudományi Egyetem Villamosmérnöki és Informatikai Kar MIT Nagyteljesítményű mikrovezérlők tantárgy [vimim342] 8x8x8 LED Cube Készítette: Szikra István URLJRN Tartalomjegyzék
Programmable Chip. System on a Chip. Lazányi János. Tartalom. A hagyományos technológia SoC / PSoC SoPC Fejlesztés menete Mi van az FPGA-ban?
 System on a Chip Programmable Chip Lazányi János 2010 Tartalom A hagyományos technológia SoC / PSoC SoPC Fejlesztés menete Mi van az FPGA-ban? Page 2 1 A hagyományos technológia Elmosódó határvonalak Page
System on a Chip Programmable Chip Lazányi János 2010 Tartalom A hagyományos technológia SoC / PSoC SoPC Fejlesztés menete Mi van az FPGA-ban? Page 2 1 A hagyományos technológia Elmosódó határvonalak Page
6.2. TMS320C64x és TMS320C67xx DSP használata
 6.2. TMS320C64x és TMS320C67xx DSP használata 6.2.1. bemutatása TI Davinci DM6446 EVM rövid A Davinci DM6446 EVM az alábbi fő hardver paraméterekkel rendelkezik: 1db ARM 9 CPU (ARM926EJ) 1db C64x DSP 4MB
6.2. TMS320C64x és TMS320C67xx DSP használata 6.2.1. bemutatása TI Davinci DM6446 EVM rövid A Davinci DM6446 EVM az alábbi fő hardver paraméterekkel rendelkezik: 1db ARM 9 CPU (ARM926EJ) 1db C64x DSP 4MB
Számítógépek felépítése, alapfogalmak
 2. előadás Számítógépek felépítése, alapfogalmak Lovas Szilárd, Krankovits Melinda SZE MTK MSZT kmelinda@sze.hu B607 szoba Nem reprezentatív felmérés kinek van ilyen számítógépe? 2 Nem reprezentatív felmérés
2. előadás Számítógépek felépítése, alapfogalmak Lovas Szilárd, Krankovits Melinda SZE MTK MSZT kmelinda@sze.hu B607 szoba Nem reprezentatív felmérés kinek van ilyen számítógépe? 2 Nem reprezentatív felmérés
Járműfedélzeti rendszerek I. 5. előadás Dr. Bécsi Tamás
 Járműfedélzeti rendszerek I. 5. előadás Dr. Bécsi Tamás Megszakítások (Interrupts: IT) Megszakítás fogalma Egy aszinkron jelzés (pl. gomblenyomás) a processzor felé (Interrupt Request: IRQ), hogy valamely
Járműfedélzeti rendszerek I. 5. előadás Dr. Bécsi Tamás Megszakítások (Interrupts: IT) Megszakítás fogalma Egy aszinkron jelzés (pl. gomblenyomás) a processzor felé (Interrupt Request: IRQ), hogy valamely
ARM Cortex magú mikrovezérlők
 ARM Cortex magú mikrovezérlők 8. Debug-olás Scherer Balázs Budapest University of Technology and Economics Department of Measurement and Information Systems BME-MIT 2017 Tradicionális debug módszerek Hagyományos
ARM Cortex magú mikrovezérlők 8. Debug-olás Scherer Balázs Budapest University of Technology and Economics Department of Measurement and Information Systems BME-MIT 2017 Tradicionális debug módszerek Hagyományos
A Memory Interface Generator (MIG) beállítása a Logsys Kintex-7 FPGA kártyához
 beállítása a Logsys Kintex-7 FPGA kártyához") A Memory Interface Generator (MIG) beállítása a Logsys Kintex-7 FPGA kártyához Ellenőrizzük a projektből importált adatokat. Ha rendben vannak, akkor kattintsunk a Next gombra. Válasszuk a Create Design
A Memory Interface Generator (MIG) beállítása a Logsys Kintex-7 FPGA kártyához Ellenőrizzük a projektből importált adatokat. Ha rendben vannak, akkor kattintsunk a Next gombra. Válasszuk a Create Design
Mikrovezérlők Alkalmazástechnikája
 Gingl Zoltán, 2013, Szeged Mikrovezérlők Alkalmazástechnikája 2015.06.28. 22:20 Működést támogató perifériák és használatuk 1 A processzornak ütemjel (órajel) szükséges Számos periféria órajelét is adja
Gingl Zoltán, 2013, Szeged Mikrovezérlők Alkalmazástechnikája 2015.06.28. 22:20 Működést támogató perifériák és használatuk 1 A processzornak ütemjel (órajel) szükséges Számos periféria órajelét is adja
MSP430 programozás Energia környezetben. Az I/O portok kezelése
 MSP430 programozás Energia környezetben Az I/O portok kezelése 1 Egyszerű I/O vezérlés Digitális I/O pinmode(pin, mode) kivezetés üzemmódjának beállítása digitalwrite(pin, state) - kimenetvezérlés digitalread(pin)
MSP430 programozás Energia környezetben Az I/O portok kezelése 1 Egyszerű I/O vezérlés Digitális I/O pinmode(pin, mode) kivezetés üzemmódjának beállítása digitalwrite(pin, state) - kimenetvezérlés digitalread(pin)
ARM Cortex magú mikrovezérlők
 ARM Cortex magú mikrovezérlők 5. Mikrovezérlő alapperifériák Scherer Balázs Budapest University of Technology and Economics Department of Measurement and Information Systems BME-MIT 2017 Tartalom Általános
ARM Cortex magú mikrovezérlők 5. Mikrovezérlő alapperifériák Scherer Balázs Budapest University of Technology and Economics Department of Measurement and Information Systems BME-MIT 2017 Tartalom Általános
Jelfeldolgozás a közlekedésben
 Jelfeldolgozás a közlekedésben 2015/2016 II. félév 8051 és C8051F020 mikrovezérlők Fontos tudnivalók Elérhetőség: ST. 108 E-mail: lovetei.istvan@mail.bme.hu Fontos tudnivalók: kjit.bme.hu Aláírás feltétele:
Jelfeldolgozás a közlekedésben 2015/2016 II. félév 8051 és C8051F020 mikrovezérlők Fontos tudnivalók Elérhetőség: ST. 108 E-mail: lovetei.istvan@mail.bme.hu Fontos tudnivalók: kjit.bme.hu Aláírás feltétele:
Arduino bevezető Szenzorhálózatok és alkalmazásaik
 Arduino bevezető Szenzorhálózatok és alkalmazásaik VITMMA09 Okos város MSc mellékspecializáció Mi az Arduino? Nyílt hardver és szoftver platform 8 bites Atmel mikrokontroller köré építve Ökoszisztéma:
Arduino bevezető Szenzorhálózatok és alkalmazásaik VITMMA09 Okos város MSc mellékspecializáció Mi az Arduino? Nyílt hardver és szoftver platform 8 bites Atmel mikrokontroller köré építve Ökoszisztéma:
Mikroprocesszor CPU. C Central Központi. P Processing Számító. U Unit Egység
 Mikroprocesszor CPU C Central Központi P Processing Számító U Unit Egység A mikroprocesszor általános belső felépítése 1-1 BUSZ Utasítás dekóder 1-1 BUSZ Az utasítás regiszterben levő utasítás értelmezését
Mikroprocesszor CPU C Central Központi P Processing Számító U Unit Egység A mikroprocesszor általános belső felépítése 1-1 BUSZ Utasítás dekóder 1-1 BUSZ Az utasítás regiszterben levő utasítás értelmezését
MSP430 programozás Energia környezetben. Kitekintés, további lehetőségek
 MSP430 programozás Energia környezetben Kitekintés, további lehetőségek 1 Még nem merítettünk ki minden lehetőséget Kapacitív érzékelés (nyomógombok vagy csúszka) Az Energia egyelőre nem támogatja, csak
MSP430 programozás Energia környezetben Kitekintés, további lehetőségek 1 Még nem merítettünk ki minden lehetőséget Kapacitív érzékelés (nyomógombok vagy csúszka) Az Energia egyelőre nem támogatja, csak
ÉRZÉKELŐK ÉS BEAVATKOZÓK I. 1. BEVEZETÉS
 ÉRZÉKELŐK ÉS BEAVATKOZÓK I. 1. BEVEZETÉS Dr. Soumelidis Alexandros 2018.09.06. BME KÖZLEKEDÉSMÉRNÖKI ÉS JÁRMŰMÉRNÖKI KAR 32708-2/2017/INTFIN SZÁMÚ EMMI ÁLTAL TÁMOGATOTT TANANYAG Mivel foglalkozunk? Rendszer
ÉRZÉKELŐK ÉS BEAVATKOZÓK I. 1. BEVEZETÉS Dr. Soumelidis Alexandros 2018.09.06. BME KÖZLEKEDÉSMÉRNÖKI ÉS JÁRMŰMÉRNÖKI KAR 32708-2/2017/INTFIN SZÁMÚ EMMI ÁLTAL TÁMOGATOTT TANANYAG Mivel foglalkozunk? Rendszer
Mikrorendszerek tervezése
 BUDAPESTI MŰSZAKI ÉS GAZDASÁGTUDOMÁNYI EGYETEM VILLAMOSMÉRNÖKI ÉS INFORMATIKAI KAR MÉRÉSTECHNIKA ÉS INFORMÁCIÓS RENDSZEREK TANSZÉK Mikrorendszerek tervezése Megszakítás- és kivételkezelés Fehér Béla Raikovich
BUDAPESTI MŰSZAKI ÉS GAZDASÁGTUDOMÁNYI EGYETEM VILLAMOSMÉRNÖKI ÉS INFORMATIKAI KAR MÉRÉSTECHNIKA ÉS INFORMÁCIÓS RENDSZEREK TANSZÉK Mikrorendszerek tervezése Megszakítás- és kivételkezelés Fehér Béla Raikovich
Az AVR ATmega128 mikrokontroller
 Az AVR ATmega128 mikrokontroller Rövid leírás Ez a leírás a Mérés labor II. tárgy első mikrokontrolleres témájú mérési gyakorlatához készült. Csak annyit tartalmaz általánosan az IC-ről, ami szerintünk
Az AVR ATmega128 mikrokontroller Rövid leírás Ez a leírás a Mérés labor II. tárgy első mikrokontrolleres témájú mérési gyakorlatához készült. Csak annyit tartalmaz általánosan az IC-ről, ami szerintünk
Modbus kommunikáció légkondícionálókhoz
 Modbus kommunikáció légkondícionálókhoz FJ-RC-MBS-1 Mobus szervezet: -> http://www.modbus.org (néha Modbus-IDA) -> Modbus eszköz kereső motor http://www.modbus.org/devices.php Modbus (RTU) - soros kommunikációs
Modbus kommunikáció légkondícionálókhoz FJ-RC-MBS-1 Mobus szervezet: -> http://www.modbus.org (néha Modbus-IDA) -> Modbus eszköz kereső motor http://www.modbus.org/devices.php Modbus (RTU) - soros kommunikációs
Nagy Gergely április 4.
 Mikrovezérlők Nagy Gergely BME EET 2012. április 4. ebook ready 1 Bevezetés Áttekintés Az elektronikai tervezés eszközei Mikroprocesszorok 2 A mikrovezérlők 3 Főbb gyártók Áttekintés A mikrovezérlők az
Mikrovezérlők Nagy Gergely BME EET 2012. április 4. ebook ready 1 Bevezetés Áttekintés Az elektronikai tervezés eszközei Mikroprocesszorok 2 A mikrovezérlők 3 Főbb gyártók Áttekintés A mikrovezérlők az
Autóipari beágyazott rendszerek
 Autóipari beágyazott rendszerek Dr. Fodor, Dénes Speiser, Ferenc Szerzői jog 2014 Pannon Egyetem A tananyag a TÁMOP-4.1.2.A/1-11/1-2011-0042 azonosító számú Mechatronikai mérnök MSc tananyagfejlesztés
Autóipari beágyazott rendszerek Dr. Fodor, Dénes Speiser, Ferenc Szerzői jog 2014 Pannon Egyetem A tananyag a TÁMOP-4.1.2.A/1-11/1-2011-0042 azonosító számú Mechatronikai mérnök MSc tananyagfejlesztés
Útmutató a Computer Setup (F10) segédprogram használatához dx2300 minitorony
 segédprogram használatához dx2300 minitorony") Útmutató a Computer Setup (F10) segédprogram használatához dx2300 minitorony HP Compaq üzleti célú számítógép Copyright 2007 Hewlett-Packard Development Company, L.P. Az itt közölt információ értesítés
Útmutató a Computer Setup (F10) segédprogram használatához dx2300 minitorony HP Compaq üzleti célú számítógép Copyright 2007 Hewlett-Packard Development Company, L.P. Az itt közölt információ értesítés
9.1.1. ARM mikrovezérlők programozása
 9.1.1. ARM mikrovezérlők programozása E fejezetben az ARM mikrovezérlők programozása lesz ismertetve néhány példaprogram és gyakorlati alkalmazás bemutatásával. Az általunk használt ARM mikrovezérlő gyártója
9.1.1. ARM mikrovezérlők programozása E fejezetben az ARM mikrovezérlők programozása lesz ismertetve néhány példaprogram és gyakorlati alkalmazás bemutatásával. Az általunk használt ARM mikrovezérlő gyártója
T Bird 2. AVR fejlesztőpanel. Használati utasítás. Gyártja: BioDigit Kft. Forgalmazza: HEStore.hu webáruház. BioDigit Kft, 2012. Minden jog fenntartva
 T Bird 2 AVR fejlesztőpanel Használati utasítás Gyártja: BioDigit Kft Forgalmazza: HEStore.hu webáruház BioDigit Kft, 2012 Minden jog fenntartva Főbb tulajdonságok ATMEL AVR Atmega128 típusú mikrovezérlő
T Bird 2 AVR fejlesztőpanel Használati utasítás Gyártja: BioDigit Kft Forgalmazza: HEStore.hu webáruház BioDigit Kft, 2012 Minden jog fenntartva Főbb tulajdonságok ATMEL AVR Atmega128 típusú mikrovezérlő
Operációs rendszerek. Bemutatkozás
 Bevezetés az operációs rendszerek világába dr. Benyó Balázs benyo@sze.hu Bemutatkozás www.sze.hu/~benyo 1 Számítógép HW-SW felépítése felhasználó felhasználó felhasználó Operációs rendszer Operációs rendszer
Bevezetés az operációs rendszerek világába dr. Benyó Balázs benyo@sze.hu Bemutatkozás www.sze.hu/~benyo 1 Számítógép HW-SW felépítése felhasználó felhasználó felhasználó Operációs rendszer Operációs rendszer
Nagyteljesítményű mikrovezérlők
 Nagyteljesítményű mikrovezérlők 6. CMSIS és Fejlesztőkörnyezetek Scherer Balázs Budapest University of Technology and Economics Department of Measurement and Information Systems BME-MIT 2015 CMSIS Cortex
Nagyteljesítményű mikrovezérlők 6. CMSIS és Fejlesztőkörnyezetek Scherer Balázs Budapest University of Technology and Economics Department of Measurement and Information Systems BME-MIT 2015 CMSIS Cortex
I. C8051Fxxx mikrovezérlők hardverfelépítése, működése. II. C8051Fxxx mikrovezérlők programozása. III. Digitális perifériák
 I. C8051Fxxx mikrovezérlők hardverfelépítése, működése 1. Adja meg a belső RAM felépítését! 2. Miben különbözik a belső RAM alsó és felső felének elérhetősége? 3. Hogyan érhetők el az SFR regiszterek?
I. C8051Fxxx mikrovezérlők hardverfelépítése, működése 1. Adja meg a belső RAM felépítését! 2. Miben különbözik a belső RAM alsó és felső felének elérhetősége? 3. Hogyan érhetők el az SFR regiszterek?
Labor 2 Mikrovezérlők
 Labor 2 Mikrovezérlők ATMEL AVR - ARDUINO BUDAI TAMÁS 2015. 09. 06. Tartalom Mikrovezérlők Mikrovezérlők felépítése, működése Mikrovezérlő típusok, gyártók Mikrovezérlők perifériái Mikrovezérlők programozása
Labor 2 Mikrovezérlők ATMEL AVR - ARDUINO BUDAI TAMÁS 2015. 09. 06. Tartalom Mikrovezérlők Mikrovezérlők felépítése, működése Mikrovezérlő típusok, gyártók Mikrovezérlők perifériái Mikrovezérlők programozása
Járműfedélzeti rendszerek I. 2. előadás Dr. Bécsi Tamás
 Járműfedélzeti rendszerek I. 2. előadás Dr. Bécsi Tamás Alapfogalmak (MCU) I. Gépi szóhossz A processzor által egyszerre kezelhető adatmennyiség, azaz egy működési lépés során hány bit információ kerül
Járműfedélzeti rendszerek I. 2. előadás Dr. Bécsi Tamás Alapfogalmak (MCU) I. Gépi szóhossz A processzor által egyszerre kezelhető adatmennyiség, azaz egy működési lépés során hány bit információ kerül
I 2 C, RS-232 és USB. Informatikai eszközök fizikai alapjai. Oláh Tamás István 2015.04.08
 I 2 C, RS-232 és USB Informatikai eszközök fizikai alapjai Oláh Tamás István 2015.04.08 Az I 2 C Busz Phillips által kifejlesztett kétvezetékes szinkron adatátviteli eszköz integrált áramkörök összekapcsolására
I 2 C, RS-232 és USB Informatikai eszközök fizikai alapjai Oláh Tamás István 2015.04.08 Az I 2 C Busz Phillips által kifejlesztett kétvezetékes szinkron adatátviteli eszköz integrált áramkörök összekapcsolására
ÉRZÉKELŐK ÉS BEAVATKOZÓK I. 0. TANTÁRGY ISMERTETŐ
 ÉRZÉKELŐK ÉS BEAVATKOZÓK I. 0. TANTÁRGY ISMERTETŐ Dr. Soumelidis Alexandros 2018.09.06. BME KÖZLEKEDÉSMÉRNÖKI ÉS JÁRMŰMÉRNÖKI KAR 32708-2/2017/INTFIN SZÁMÚ EMMI ÁLTAL TÁMOGATOTT TANANYAG A tárgy célja
ÉRZÉKELŐK ÉS BEAVATKOZÓK I. 0. TANTÁRGY ISMERTETŐ Dr. Soumelidis Alexandros 2018.09.06. BME KÖZLEKEDÉSMÉRNÖKI ÉS JÁRMŰMÉRNÖKI KAR 32708-2/2017/INTFIN SZÁMÚ EMMI ÁLTAL TÁMOGATOTT TANANYAG A tárgy célja
Operációs rendszerek MINB240. Bevitel-Kivitel. 6. előadás Input és Output. Perifériák csoportosításá, használat szerint
 Operációs rendszerek MINB240 6. előadás Input és Output Operációs rendszerek MINB240 1 Bevitel-Kivitel Eddig a számítógép agyáról volt szó Processzusok, memória, stb Szükség van eszközökre Adat bevitel
Operációs rendszerek MINB240 6. előadás Input és Output Operációs rendszerek MINB240 1 Bevitel-Kivitel Eddig a számítógép agyáról volt szó Processzusok, memória, stb Szükség van eszközökre Adat bevitel
Mikrovezérlők Alkalmazástechnikája
 Gingl Zoltán, 2017, Szeged Mikrovezérlők Alkalmazástechnikája 17 dec. 1 http://www.inf.uszeged.hu/~gingl/hallgatoknak/mikrovezerlok Itt találhatók a legfrissebb részletes információk, letölthető anyagok
Gingl Zoltán, 2017, Szeged Mikrovezérlők Alkalmazástechnikája 17 dec. 1 http://www.inf.uszeged.hu/~gingl/hallgatoknak/mikrovezerlok Itt találhatók a legfrissebb részletes információk, letölthető anyagok
Járműfedélzeti rendszerek I. 3. előadás Dr. Bécsi Tamás
 Járműfedélzeti rendszerek I. 3. előadás Dr. Bécsi Tamás ATmega128 CPU Single-level pipelining Egyciklusú ALU működés Reg. reg., reg. konst. közötti műveletek 32 x 8 bit általános célú regiszter Egyciklusú
Járműfedélzeti rendszerek I. 3. előadás Dr. Bécsi Tamás ATmega128 CPU Single-level pipelining Egyciklusú ALU működés Reg. reg., reg. konst. közötti műveletek 32 x 8 bit általános célú regiszter Egyciklusú
A Netburner fejlesztőeszköz alkalmazástechnikája
 5.2.1. A Netburner fejlesztőeszköz alkalmazástechnikája A NetBurner vállalatról A NetBurner vállalatot ##LINK: http://netburner.com ## 1998-ban alapították. A kezdetekben hálózati eszközökhöz programozó
5.2.1. A Netburner fejlesztőeszköz alkalmazástechnikája A NetBurner vállalatról A NetBurner vállalatot ##LINK: http://netburner.com ## 1998-ban alapították. A kezdetekben hálózati eszközökhöz programozó
11.3.1. Az MSP430 energiatakarékos használata
 11.3.1. Az MSP430 energiatakarékos használata A Texas Instruments ##LINK: www.ti.com## által fejlesztett MSP430 ##Mixed Signal Processor## család tagjai létrehozásakor a tervezők fontos célja volt a rendkívül
11.3.1. Az MSP430 energiatakarékos használata A Texas Instruments ##LINK: www.ti.com## által fejlesztett MSP430 ##Mixed Signal Processor## család tagjai létrehozásakor a tervezők fontos célja volt a rendkívül
ARM Cortex magú mikrovezérlők
 ARM Cortex magú mikrovezérlők 12. STemWin garfikus könyvtár Scherer Balázs Budapest University of Technology and Economics Department of Measurement and Information Systems BME-MIT 2018 LCD kijelzők kezelése
ARM Cortex magú mikrovezérlők 12. STemWin garfikus könyvtár Scherer Balázs Budapest University of Technology and Economics Department of Measurement and Information Systems BME-MIT 2018 LCD kijelzők kezelése
Járműfedélzeti rendszerek I. 4. előadás Dr. Bécsi Tamás
 Járműfedélzeti rendszerek I. 4. előadás Dr. Bécsi Tamás Rendszer órajel Órajel osztás XTAL Divide Control (XDIV) Register 2 129 oszthat Órajel források CKSEL fuse bit Külső kristály/kerámia rezonátor Külső
Járműfedélzeti rendszerek I. 4. előadás Dr. Bécsi Tamás Rendszer órajel Órajel osztás XTAL Divide Control (XDIV) Register 2 129 oszthat Órajel források CKSEL fuse bit Külső kristály/kerámia rezonátor Külső
ARM Cortex magú mikrovezérlők
 ARM Cortex magú mikrovezérlők 5. Mikrovezérlő alapperifériák Scherer Balázs Budapest University of Technology and Economics Department of Measurement and Information Systems BME-MIT 2017 Tartalom Általános
ARM Cortex magú mikrovezérlők 5. Mikrovezérlő alapperifériák Scherer Balázs Budapest University of Technology and Economics Department of Measurement and Information Systems BME-MIT 2017 Tartalom Általános
Villamos jelek mintavételezése, feldolgozása. Mérésadatgyűjtés, jelfeldolgozás 9. előadás
 Villamos jelek mintavételezése, feldolgozása (ellenállás mérés LabVIEW támogatással) Számítógépes mérőrendszerek Mérésadatgyűjtés, jelfeldolgozás 9. előadás Dr. Iványi Miklósné, egyetemi tanár Schiffer
Villamos jelek mintavételezése, feldolgozása (ellenállás mérés LabVIEW támogatással) Számítógépes mérőrendszerek Mérésadatgyűjtés, jelfeldolgozás 9. előadás Dr. Iványi Miklósné, egyetemi tanár Schiffer
Autóipari beágyazott rendszerek. AutoSAR Platform
 Autóipari beágyazott rendszerek AutoSAR Platform 1 Az AutoSAR Architektúra Software Component Application Software Component Actuator Software Component Sensor Software Component Software... Runtime Environment
Autóipari beágyazott rendszerek AutoSAR Platform 1 Az AutoSAR Architektúra Software Component Application Software Component Actuator Software Component Sensor Software Component Software... Runtime Environment
Digitális áramkörök és rendszerek alkalmazása az űrben 2.
 Budapest Universit y of Technology and Economics Digitális áramkörök és rendszerek alkalmazása az űrben 2. Csurgai-Horváth László, BME-HVT 2015. A fedélzeti számítógép - méretek Pikoműholdak... nagy műholdak
Budapest Universit y of Technology and Economics Digitális áramkörök és rendszerek alkalmazása az űrben 2. Csurgai-Horváth László, BME-HVT 2015. A fedélzeti számítógép - méretek Pikoműholdak... nagy műholdak
ARM Cortex magú mikrovezérlők
 ARM Cortex magú mikrovezérlők 2. Cortex-M3 mag Scherer Balázs Budapest University of Technology and Economics Department of Measurement and Information Systems BME-MIT 2016 A Cortex-M3 mag BME-MIT 2016
ARM Cortex magú mikrovezérlők 2. Cortex-M3 mag Scherer Balázs Budapest University of Technology and Economics Department of Measurement and Information Systems BME-MIT 2016 A Cortex-M3 mag BME-MIT 2016
Nagyteljesítményű mikrovezérlők
 Nagyteljesítményű mikrovezérlők 5. System Control block Scherer Balázs Budapest University of Technology and Economics Department of Measurement and Information Systems BME-MIT 2015 Tartalom Az ARM7 magú
Nagyteljesítményű mikrovezérlők 5. System Control block Scherer Balázs Budapest University of Technology and Economics Department of Measurement and Information Systems BME-MIT 2015 Tartalom Az ARM7 magú
IndraControl L 10 (CML 10) vezérlı installációs segítség, elsı lépések
 vezérlı installációs segítség, elsı lépések") IndraControl L 10 (CML 10) vezérlı installációs segítség, elsı lépések Az alap konfiguráció tartalma: PLC: Bosch Rexroth Kft. 1149 Budapest Angol u. 34. Tel.: +36 (1) 422-3200 Fax: +36 (1) 422-3201 www.boschrexroth.hu
IndraControl L 10 (CML 10) vezérlı installációs segítség, elsı lépések Az alap konfiguráció tartalma: PLC: Bosch Rexroth Kft. 1149 Budapest Angol u. 34. Tel.: +36 (1) 422-3200 Fax: +36 (1) 422-3201 www.boschrexroth.hu
Using the CW-Net in a user defined IP network
 Using the CW-Net in a user defined IP network Data transmission and device control through IP platform CW-Net Basically, CableWorld's CW-Net operates in the 10.123.13.xxx IP address range. User Defined
Using the CW-Net in a user defined IP network Data transmission and device control through IP platform CW-Net Basically, CableWorld's CW-Net operates in the 10.123.13.xxx IP address range. User Defined
Bevezetés a számítástechnikába
 Bevezetés a számítástechnikába Megszakítások Fodor Attila Pannon Egyetem Műszaki Informatikai Kar Villamosmérnöki és Információs Rendszerek Tanszék foa@almos.vein.hu 2010. november 9. Bevezetés Megszakítások
Bevezetés a számítástechnikába Megszakítások Fodor Attila Pannon Egyetem Műszaki Informatikai Kar Villamosmérnöki és Információs Rendszerek Tanszék foa@almos.vein.hu 2010. november 9. Bevezetés Megszakítások
A Számítógépek hardver elemei
 Mechatronika, Optika és Gépészeti Informatika Tanszék Kovács Endre tud. Mts. A Számítógépek hardver elemei Korszerű perifériák és rendszercsatolásuk A µ processzoros rendszer regiszter modellje A µp gépi
Mechatronika, Optika és Gépészeti Informatika Tanszék Kovács Endre tud. Mts. A Számítógépek hardver elemei Korszerű perifériák és rendszercsatolásuk A µ processzoros rendszer regiszter modellje A µp gépi
Architektúra, megszakítási rendszerek
 Architektúra, megszakítási ek Mirıl lesz szó? Megszakítás fogalma Megszakítás folyamata Többszintű megszakítási ek Koschek Vilmos Példa: Intel Pentium vkoschek@vonalkodhu Koschek Vilmos Fogalom A számítógép
Architektúra, megszakítási ek Mirıl lesz szó? Megszakítás fogalma Megszakítás folyamata Többszintű megszakítási ek Koschek Vilmos Példa: Intel Pentium vkoschek@vonalkodhu Koschek Vilmos Fogalom A számítógép
Mikrokontroller labor, 1. mérés ellenőrző kérdések
 Mikrokontroller labor, 1. mérés ellenőrző kérdések 1. Milyen típusú objektumokat tartalmazhat egy integrált alkatrészkönyvtár az Altium Designer programban? Kapcsolási rajz ábra, NYÁK rajzolat (footprint),
Mikrokontroller labor, 1. mérés ellenőrző kérdések 1. Milyen típusú objektumokat tartalmazhat egy integrált alkatrészkönyvtár az Altium Designer programban? Kapcsolási rajz ábra, NYÁK rajzolat (footprint),
Digitális áramkörök és rendszerek alkalmazása az űrben 3.
 Budapest Universit y of Technology and Economics Digitális áramkörök és rendszerek alkalmazása az űrben 3. Csurgai-Horváth László, BME-HVT 2016. Fedélzeti adatgyűjtő az ESEO LMP kísérletéhez European Student
Budapest Universit y of Technology and Economics Digitális áramkörök és rendszerek alkalmazása az űrben 3. Csurgai-Horváth László, BME-HVT 2016. Fedélzeti adatgyűjtő az ESEO LMP kísérletéhez European Student
Utolsó módosítás:
 Utolsó módosítás: 2012. 09. 06. 1 A tantárggyal kapcsolatos adminisztratív kérdésekkel Micskei Zoltánt keressétek. 2 3 4 5 6 7 8 9 Forrás: Gartner Hype Cycle for Virtualization, 2010, http://premierit.intel.com/docs/doc-5768
Utolsó módosítás: 2012. 09. 06. 1 A tantárggyal kapcsolatos adminisztratív kérdésekkel Micskei Zoltánt keressétek. 2 3 4 5 6 7 8 9 Forrás: Gartner Hype Cycle for Virtualization, 2010, http://premierit.intel.com/docs/doc-5768
evosoft Hungary Kft.
 2. fejezet: Runtime Software Előadó: Petényi István - üzletágvezető ELŐADÓ: PETÉNYI ISTVÁN üzletágvezető Programozó matematikus, ELTE Informatikai Kar projektvetető, ágazatvezető, szakterületvezető, üzletág
2. fejezet: Runtime Software Előadó: Petényi István - üzletágvezető ELŐADÓ: PETÉNYI ISTVÁN üzletágvezető Programozó matematikus, ELTE Informatikai Kar projektvetető, ágazatvezető, szakterületvezető, üzletág
1. Az utasítás beolvasása a processzorba
 A MIKROPROCESSZOR A mikroprocesszor olyan nagy bonyolultságú félvezető eszköz, amely a digitális számítógép központi egységének a feladatait végzi el. Dekódolja az uatasításokat, vezérli a műveletek elvégzéséhez
A MIKROPROCESSZOR A mikroprocesszor olyan nagy bonyolultságú félvezető eszköz, amely a digitális számítógép központi egységének a feladatait végzi el. Dekódolja az uatasításokat, vezérli a műveletek elvégzéséhez
T Bird 2. AVR fejlesztőpanel. Használati utasítás. Gyártja: BioDigit Kft. Forgalmazza: HEStore.hu webáruház. BioDigit Kft, 2012. Minden jog fenntartva
 T Bird 2 AVR fejlesztőpanel Használati utasítás Gyártja: BioDigit Kft Forgalmazza: HEStore.hu webáruház BioDigit Kft, 2012 Minden jog fenntartva Főbb tulajdonságok ATMEL AVR Atmega128 típusú mikrovezérlő
T Bird 2 AVR fejlesztőpanel Használati utasítás Gyártja: BioDigit Kft Forgalmazza: HEStore.hu webáruház BioDigit Kft, 2012 Minden jog fenntartva Főbb tulajdonságok ATMEL AVR Atmega128 típusú mikrovezérlő
16F628A megszakítás kezelése
 16F628A megszakítás kezelése A 'megszakítás' azt jelenti, hogy a program normális, szekvenciális futása valamilyen külső hatás miatt átmenetileg felfüggesztődik, és a vezérlést egy külön rutin, a megszakításkezelő
16F628A megszakítás kezelése A 'megszakítás' azt jelenti, hogy a program normális, szekvenciális futása valamilyen külső hatás miatt átmenetileg felfüggesztődik, és a vezérlést egy külön rutin, a megszakításkezelő
2016/08/31 02:45 1/6 Hardver alapok
 2016/08/31 02:45 1/6 Hardver alapok < Hardver Hardver alapok Szerző: Sallai András Copyright Sallai András, 2011, 2013, 2014 Licenc: GNU Free Documentation License 1.3 Web: http://szit.hu Bevezetés A számítógépet
2016/08/31 02:45 1/6 Hardver alapok < Hardver Hardver alapok Szerző: Sallai András Copyright Sallai András, 2011, 2013, 2014 Licenc: GNU Free Documentation License 1.3 Web: http://szit.hu Bevezetés A számítógépet
Computer Architectures
 Computer Architectures 1. A card and code based door-lock 2016. március 4. Budapest Horváth Gábor associate professor BUTE Department of Networked Systems and Services ghorvath@hit.bme.hu Számítógép Architektúrák
Computer Architectures 1. A card and code based door-lock 2016. március 4. Budapest Horváth Gábor associate professor BUTE Department of Networked Systems and Services ghorvath@hit.bme.hu Számítógép Architektúrák
12.1.1. A Picoblaze Core implementálása FPGA-ba
 12.1.1. A Picoblaze Core implementálása FPGA-ba A Picoblaze processzor Ebben a fejezetben kerül bemutatásra a Pikoblaze-zel való munka. A Picoblaze szoftveres processzort alkotója Ken Chapman a Xilinx
12.1.1. A Picoblaze Core implementálása FPGA-ba A Picoblaze processzor Ebben a fejezetben kerül bemutatásra a Pikoblaze-zel való munka. A Picoblaze szoftveres processzort alkotója Ken Chapman a Xilinx
5.1. fejezet - Általános 32 bites mikrovezérlő/processzor alkalmazástechnikája A Freescale
 5.1. fejezet - Általános 32 bites mikrovezérlő/processzor alkalmazástechnikája Jelenleg a piacon több általános jellegű processzor-architektúra van a beágyazott eszköz piacon, ezek közül a legismertebbek:
5.1. fejezet - Általános 32 bites mikrovezérlő/processzor alkalmazástechnikája Jelenleg a piacon több általános jellegű processzor-architektúra van a beágyazott eszköz piacon, ezek közül a legismertebbek:
Építsünk IP telefont!
 Építsünk IP telefont! Moldován István Sonkoly Balázs BUDAPESTI MŰSZAKI ÉS GAZDASÁGTUDOMÁNYI EGYETEM TÁVKÖZLÉSI ÉS MÉDIAINFORMATIKAI TANSZÉK Egy IP telefon felépítése Menedzsment interfész moldovan@tmit.bme.hu
Építsünk IP telefont! Moldován István Sonkoly Balázs BUDAPESTI MŰSZAKI ÉS GAZDASÁGTUDOMÁNYI EGYETEM TÁVKÖZLÉSI ÉS MÉDIAINFORMATIKAI TANSZÉK Egy IP telefon felépítése Menedzsment interfész moldovan@tmit.bme.hu