Műszaki diagnosztika Telemetria fajtái és alkalmazása
|
|
|
- Gyöngyi Törökné
- 5 évvel ezelőtt
- Látták:
Átírás
1 Műszaki diagnosztika Telemetria fajtái és alkalmazása Kőrös Péter Közúti és Vasúti Járművek Tanszék / JKK Tanszéki mérnök (IS201 vagy a tanszéken) korosp@ga.sze.hu Web:
2 2 Tartalom Ajánlott irodalom Telemetria fogalma és fajtái Járműfizika alapjai Adatelemzés Példák
3 3 Ajánlott irodalom Analysis Techniques for Racecar Data Acquisition Jorge Segers (Second Edition) 2014 Advanced Vehicle Dynamics Applied to Race Car Design & Development Optimumg.com Bári Gergely Vehicle Dynamics (Theory and Application) Reza N. Jazar Tires, Suspension and Handling John C. Dixon

4 4 Telemetria fogalma A telemetria nagy távolságú adattovábbítást, távoli méréseket és vezérlést lehetővé tévő, jellemzően vezeték nélküli kommunikációs rendszer. A görög téle= 'távoli, messzire', és metreó= 'mér' szavakból ered.
 Kétirányú: A megfigyelések alapján a jármű jellemzőit módosítani tudjuk (motor, fékerő, átprogramozott kipörgésgátló stb.")
5 5 Telemetria rendszerek autó és motorsportban Irány szerint: Egyirányú: Vizsgált jármű -> Mérnökök (Fordított eset nem fordul elő. Erre a célra rádió illetve információs tábla) Kétirányú: A megfigyelések alapján a jármű jellemzőit módosítani tudjuk (motor, fékerő, átprogramozott kipörgésgátló stb. (drága és gyakran tiltott rendszerek) Adatovábbítás médiuma: Rádiós: Adott frekvenciatartományban, nagy infrastruktúrát kiépítve, sok adatot továbbítva Internetes: Késleltetést visz a rendszerbe (jóval nagyobbat, mint a rádiós), de nem kell külön infrastruktúrát kiépíteni




6 6 Telemetria rendszerek helyett: Adatrögzítő rendszerek Célja: Mérnöki felügyelet a rendszerek felett, de nem online (valósidejű) módon, hanem utólagos elemzésekkel Gyakran egyedi rendszerek, felhasználók számától függ, hogy milyen más programokkal tudjuk feldolgozni az adatrögzítő rendszer adatait Alapvetés: Az adatrögzítő rendszerek a pilóta elemzésével képes legnagyobb javulást elérni a köridőben (a járműbeállítások sokkal mélyebb adatelemzést igényelnek)
7 Hasznosság 7 Pontosság
8 Pontosság 8 Időtartam
9 Használhatóság 9 Komplexitás
10 10 Három fő kritérium a járműdinamika komplexitásának megértéséhez Pontosság Paraméterek száma Kinematikai és dinamikai törvények Pálya Aerodinamika Pilóta Gumik Paraméterek egymástól való függősége Tömegek és inerciák Lengéscsillapítók

11 km! 0,025 s különbség!
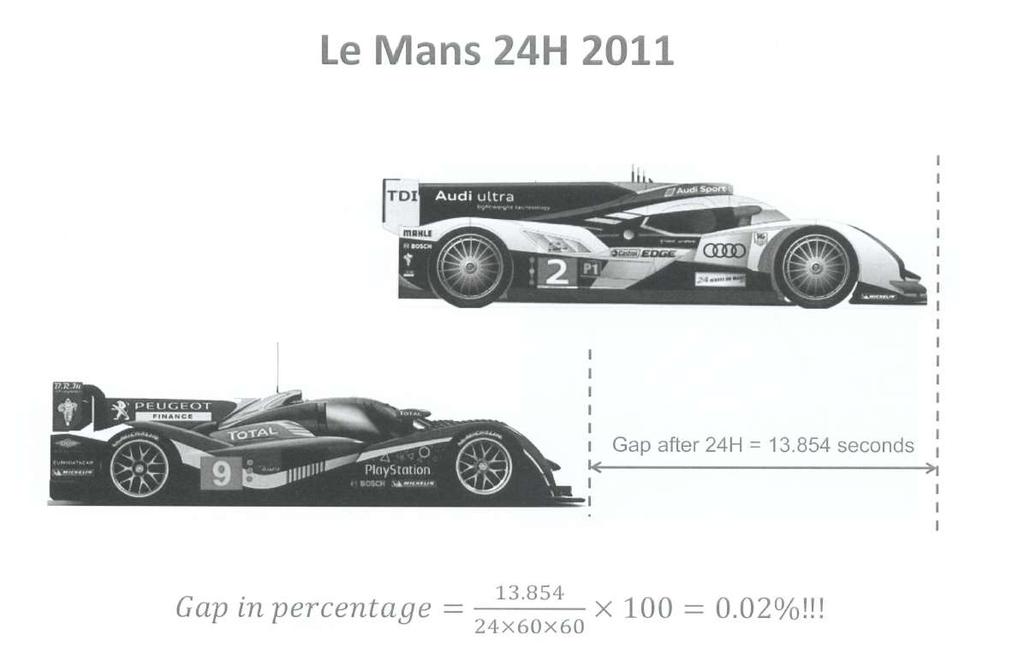
12 12



13 13 Egyszerű feladat: Járműsebesség mérése Valóban egyszerű feladat? Milyen szenzor adataiból számoljuk? A szenzor által szolgáltatott információ tényleg a jármű sebességét határozza meg? Milyen gyorsan tudjuk megállapítani a sebességet?

14 14 Miért kell a pontosság? A fizikai folyamatok más jellemző frekvenciákon hajtódnak végre egy jármű esetén. Technikai korlátokat csak jelentős beruházással tudunk leküzdeni (pl. GPS).
15 15 Miért kell a megfelelő számú paramétert megtalálni és vizsgálni? Alapeset: Egy rugóstag 3 beállítási lehetőséggel bír: Lágy, közepes, merev Ha csak tengelyenként állítunk (jobb és bal keréknél ugyanazt a beállítást alkalmazzuk), akkor 3^2 beállítás lehetéséges, azaz 9 db opciónk van Egy túraautó beállítási paraméterei 3^48 lehetőséget is adhat, ami lehetőség! Kezelhetetlen probléma, függőségeket és alapszabályokat is fel kell állítanunk! Jó teljesítmény
16 16 Járműdinamikai alaptörvények ΣF = ma ΣM = Θε
17 17 Lateral force & yaw moment
18 18
19 19




20 20

21 21 LeMans Bugatti Chicane
 Csak a gumikon")
 Minden más komponens a")


22 22 Gumik Legfontosabb komponense a járműnek (versenyeken) Csak a gumikon keresztül van kapcsolat a talajjal (remélhetőleg) Minden más komponens a gumikon átvihető maximum erőt próbálja maximalizálni (aerodinamika, lengéscsillapító, hajtásrendszer) Visszajelzést ad a jó pilótának (csak a jó gumi, a rossz gumi csak elbizonytalanítja )

23 23
24 24



25 25 Tapadási együttható Hosszirányú és keresztirányú -> Tapadási ellipszis Kerekenként különböző lehet (különböző is, a mértéke a kérdés)
26 26
27 27
28 28
29 29
30 30
31 31 Megállapítható-e a jármű alul vagy túlkormányzottsága szenzoros adatokból? Igen, minösszesen tudnunk kell a valós kerékelfordulást (pl. kormányszögszenzor), oldalgyorsulást és járműsebességet (a jármű tengelytávja is szükséges a számításhoz! 9.81*(((Wheel_angle*DEG2RAD)/(Lateral_acc*9.81)) - (Wheelbase/((Vehicle_Speed*KMH2MS)^2))) Ez egy mutatót fog eredményezni, ami a jármű viselkedésére utal (+: alulkormányzottság, -: túlkormányzottság) Kus: UnderStering Coefficient



32 32 Lengéscsillapítók A kéttömegű lengőrendszer aktívan állítható (akár valós időben, de legtöbb motorsportban betiltották) egyik tagja Pályára és pilótára kell optimalizálni!

33 33

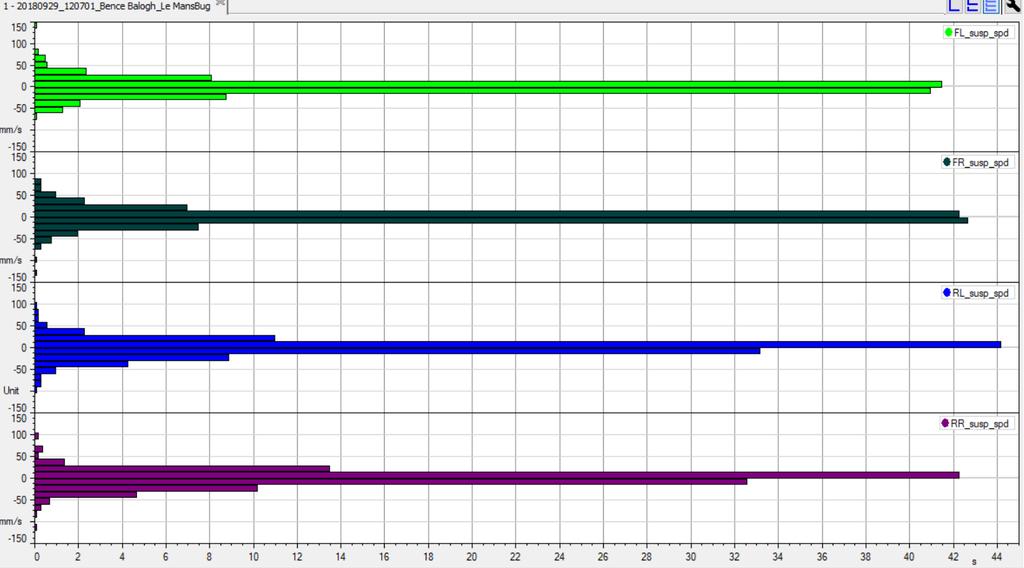
34 34 FL RL RR FR

35 35

36 36 RR RL FL FR
37 37
, ahol a hétvége folyamán változtathatjuk!")
38 38 Megfelelő áttétel Cél: Adott pályához megtalálni a legmegfelelőbb áttételt! Leginkább szimulációs kérdéskör, de vannak olyan esetek (motorsportágak), ahol a hétvége folyamán változtathatjuk! Egyszerű megoldás: Maximalizáljuk, az adott sebességprofilhoz tartozó motor munkáját! (automatizált módon)



39 39 Motor maximum terhelésgörbéje
40 40 Loggolt adatok ellenőrzése

41 41 Excel példa v mps = v kmph /3.6 i = n 60 v mps K a = v t F gyorsito = a 148 F menetellenallas = 0.2 v mps v mps + 30 M tengely = r kerek (F gyorsito + F menetellenallas ) M motortengely = M tengely i
42 42 Hajtáslánc eredeti áttételének meghatározása Mekkora hibát eredményez, ha az átlagos áttétellel számoljuk a motornyomatékot?
43 43 Hibaforrás Kis hibát eredményez!
44 44 A feladat megoldását gátló tényezők (féküzemek) Mekkora hibát eredményez, ha nem szűrjük a gyorsulás és gázpedálállás adatokat? Értelmezhetetlen diagram az eredmény!
45 45 Adatok szűrése Áttétel: Motornyomaték számítva: Ahol a gázpedálállás nagyobb, mint 98% és a gyorsulás nagyobb, mint 0 m/s 2!
46 46 Áttétel változtatása a motorgörbét tolja el a munkatérben Hosszabb áttétel Probléma vizualizálása Jelölve: Minimum sebesség Átlag sebesség Maximum sebesség Motorteljesítmény Helyes az áttétel megválasztása? Válasz nem! Túl rövidnek tűnik!
47 47 Feladat Probléma vizualizálása Megoldás: Motor összmunkáját maximalizálom Gyorsító munkát maximalizálom Azaz az idő függvényében integrálom a motorteljesítményt (vagy/is a gyorsító munkát)

48 48 Megoldás Excel Solverrel Probléma vizualizálása Adatok szűrése Csak a gyorsítási szakaszokban számolok motorteljesítményt!

49 49 Optimalizálás eredménye Probléma vizualizálása Motorfordulatszám és motorteljesítmény megváltozásának vizsgálata más áttételt alkalmazva
50 Köszönöm a figyelmet! korosp@ga.sze.hu Web: 50
Gépészeti rendszertechnika (NGB_KV002_1)
") Gépészeti rendszertechnika (NGB_KV002_1) 2. Óra Kőrös Péter Közúti és Vasúti Járművek Tanszék Tanszéki mérnök (IS201 vagy a tanszéken) E-mail: korosp@ga.sze.hu Web: http://www.sze.hu/~korosp http://www.sze.hu/~korosp/gepeszeti_rendszertechnika/
Gépészeti rendszertechnika (NGB_KV002_1) 2. Óra Kőrös Péter Közúti és Vasúti Járművek Tanszék Tanszéki mérnök (IS201 vagy a tanszéken) E-mail: korosp@ga.sze.hu Web: http://www.sze.hu/~korosp http://www.sze.hu/~korosp/gepeszeti_rendszertechnika/
Görgős járműfékpadok 2. rész
 Görgős járműfékpadok 2. rész Motorteljesítmény-mérés mérés görgős járműfékpadon dr. Nagyszokolyai Iván, BME Gépjárművek tanszék, 2008. motorteljesítmény BOSCH FLA (Funktions( Funktions- und Leistungs-Analyse
Görgős járműfékpadok 2. rész Motorteljesítmény-mérés mérés görgős járműfékpadon dr. Nagyszokolyai Iván, BME Gépjárművek tanszék, 2008. motorteljesítmény BOSCH FLA (Funktions( Funktions- und Leistungs-Analyse
Irányító és kommunikációs rendszerek III. Előadás 13
 Irányító és kommunikációs rendszerek III. Előadás 13 GSM-R Flottamenedzsment Mobil fizetési lehetőségek Parkolási díj Útdíj A GSM közlekedési felhasználása Valós idejű információs szolgáltatás Közlekedési
Irányító és kommunikációs rendszerek III. Előadás 13 GSM-R Flottamenedzsment Mobil fizetési lehetőségek Parkolási díj Útdíj A GSM közlekedési felhasználása Valós idejű információs szolgáltatás Közlekedési
Rugalmas tengelykapcsoló mérése
 BUDAPESTI MŐSZAKI ÉS GAZDASÁGTUDOMÁNYI EGYETEM Közlekedésmérnöki Kar Budapesti Mőszaki és Gazdaságtudományi Egyetem Közlekedésmérnöki Kar Jármőelemek és Hajtások Tanszék Jármőelemek és Hajtások Tanszék
BUDAPESTI MŐSZAKI ÉS GAZDASÁGTUDOMÁNYI EGYETEM Közlekedésmérnöki Kar Budapesti Mőszaki és Gazdaságtudományi Egyetem Közlekedésmérnöki Kar Jármőelemek és Hajtások Tanszék Jármőelemek és Hajtások Tanszék
SZÁMÍTÁSI FELADATOK I.
 SZÁMÍTÁSI FELADATOK I. A feladatokat figyelmesen olvassa el! A válaszokat a feladatban előírt módon adja meg! A számítást igénylő feladatoknál minden esetben először írja fel a megfelelő összefüggést (képletet),
SZÁMÍTÁSI FELADATOK I. A feladatokat figyelmesen olvassa el! A válaszokat a feladatban előírt módon adja meg! A számítást igénylő feladatoknál minden esetben először írja fel a megfelelő összefüggést (képletet),
VTOL UAV. Inerciális mérőrendszer kiválasztása vezetőnélküli repülőeszközök számára. Árvai László, Doktorandusz, ZMNE
 Inerciális mérőrendszer kiválasztása vezetőnélküli repülőeszközök számára Árvai László, Doktorandusz, ZMNE Tartalom Fejezet Témakör 1. Vezető nélküli repülőeszközök 2. Inerciális mérőrendszerek feladata
Inerciális mérőrendszer kiválasztása vezetőnélküli repülőeszközök számára Árvai László, Doktorandusz, ZMNE Tartalom Fejezet Témakör 1. Vezető nélküli repülőeszközök 2. Inerciális mérőrendszerek feladata
ÁLTALÁNOS JÁRMŰGÉPTAN
 ÁLTALÁNOS JÁRMŰGÉPTAN ELLENŐRZŐ KÉRDÉSEK 3. GÉPEK MECHANIKAI FOLYAMATAI 1. Definiálja a térbeli pont helyvektorát! r helyvektor előáll ortogonális (a 3 tengely egymásra merőleges) koordinátarendszer koordinátairányú
ÁLTALÁNOS JÁRMŰGÉPTAN ELLENŐRZŐ KÉRDÉSEK 3. GÉPEK MECHANIKAI FOLYAMATAI 1. Definiálja a térbeli pont helyvektorát! r helyvektor előáll ortogonális (a 3 tengely egymásra merőleges) koordinátarendszer koordinátairányú
Milyen el?nyt jelenthet a Lotus E21 nagyobb tengelytávja Spában?
 Milyen el?nyt jelenthet a Lotus E21 nagyobb tengelytávja Spában? by Papp István - hétf?, augusztus 19, 2013 http://www.formula1tech.hu/milyen-elonyt-jelenthet-a-lotus-e21-nagyobb-tengelytavja-spaban/ E21-es
Milyen el?nyt jelenthet a Lotus E21 nagyobb tengelytávja Spában? by Papp István - hétf?, augusztus 19, 2013 http://www.formula1tech.hu/milyen-elonyt-jelenthet-a-lotus-e21-nagyobb-tengelytavja-spaban/ E21-es
Autonóm jármű forgalomszimulátorba illesztése
 Autonóm jármű forgalomszimulátorba illesztése Szalai Mátyás 2018 Konzulens: Dr. Tettamanti Tamás A szimulációs feladat Miért hasznos? Biztonságos környezetben nyújt lehetőséget az autonóm járművek forgalmi
Autonóm jármű forgalomszimulátorba illesztése Szalai Mátyás 2018 Konzulens: Dr. Tettamanti Tamás A szimulációs feladat Miért hasznos? Biztonságos környezetben nyújt lehetőséget az autonóm járművek forgalmi
Csapat: Feladat: Ismertetni:
 Csapat: Feladat: Távirányítású vezérlés elészítése a Micro:Bi eszközhöz, amely egy másik micro:bit segítségével valósul meg, úgy hogy az eszköz mozgatásával rádiós jelet küld a vezérlő egység felé. Részfeledatok:
Csapat: Feladat: Távirányítású vezérlés elészítése a Micro:Bi eszközhöz, amely egy másik micro:bit segítségével valósul meg, úgy hogy az eszköz mozgatásával rádiós jelet küld a vezérlő egység felé. Részfeledatok:
Közúti forgalomszámlálás e_sensor rendszerrel. 2012.06.04 2012.06.10 Budapest dugódíj projekt (sajtóanyag)
") Közúti forgalomszámlálás e_sensor rendszerrel 2012.06.04 2012.06.10 Budapest dugódíj projekt (sajtóanyag) 1 Cégbemutató A Sensor Technologies Kft. videó analitikai rendszereket fejleszt budapesti székhellyel.
Közúti forgalomszámlálás e_sensor rendszerrel 2012.06.04 2012.06.10 Budapest dugódíj projekt (sajtóanyag) 1 Cégbemutató A Sensor Technologies Kft. videó analitikai rendszereket fejleszt budapesti székhellyel.
MELLÉKLETEK. amelyek a következő dokumentumot kísérik: Javaslat Az Európai Parlament és a Tanács rendelete
 EURÓPAI BIZOTTSÁG Brüsszel, 2017.5.31. COM(2017) 279 final ANNEXES 1 to 2 MELLÉKLETEK amelyek a következő dokumentumot kísérik: Javaslat Az Európai Parlament és a Tanács rendelete az új nehézgépjárművek
EURÓPAI BIZOTTSÁG Brüsszel, 2017.5.31. COM(2017) 279 final ANNEXES 1 to 2 MELLÉKLETEK amelyek a következő dokumentumot kísérik: Javaslat Az Európai Parlament és a Tanács rendelete az új nehézgépjárművek
Pneumatikus kompatibilitás
 Pneumatikus kompatibilitás Farkas József, Kőfalusi Pál, Dr. Varga Ferenc Gépjárművek üzeme I. laboratóriumi gyakorlat 1 Lektorálta és szerkesztette Dr. Varga Ferenc és Dr. Emőd István Tartalomjegyzék:
Pneumatikus kompatibilitás Farkas József, Kőfalusi Pál, Dr. Varga Ferenc Gépjárművek üzeme I. laboratóriumi gyakorlat 1 Lektorálta és szerkesztette Dr. Varga Ferenc és Dr. Emőd István Tartalomjegyzék:
Járműinformatika A jármű elektronikus rendszerei
 Járműinformatika A jármű elektronikus rendszerei 2016/2017. tanév, II. félév Dr. Kovács Szilveszter E-mail: szkovacs@iit.uni-miskolc.hu Informatika Intézet 107/a. Tel: (46) 565-111 / 21-07 A jármű alrendszerei
Járműinformatika A jármű elektronikus rendszerei 2016/2017. tanév, II. félév Dr. Kovács Szilveszter E-mail: szkovacs@iit.uni-miskolc.hu Informatika Intézet 107/a. Tel: (46) 565-111 / 21-07 A jármű alrendszerei
MA-AgroGPS Teljeskörű megoldás minden gazdálkodó számára
 Multi Alarm Zrt. MA-AgroGPS Teljeskörű megoldás minden gazdálkodó számára MA-AgroGPS Teljeskörű megoldás minden gazdálkodó számára Az MA-AgroGPS a gazdálkodók igényei alapján kidolgozott, GPS járműkövetelésen
Multi Alarm Zrt. MA-AgroGPS Teljeskörű megoldás minden gazdálkodó számára MA-AgroGPS Teljeskörű megoldás minden gazdálkodó számára Az MA-AgroGPS a gazdálkodók igényei alapján kidolgozott, GPS járműkövetelésen
Számítógépes döntéstámogatás OPTIMALIZÁLÁSI FELADATOK A SOLVER HASZNÁLATA
 SZDT-03 p. 1/24 Számítógépes döntéstámogatás OPTIMALIZÁLÁSI FELADATOK A SOLVER HASZNÁLATA Werner Ágnes Villamosmérnöki és Információs Rendszerek Tanszék e-mail: werner.agnes@virt.uni-pannon.hu Előadás
SZDT-03 p. 1/24 Számítógépes döntéstámogatás OPTIMALIZÁLÁSI FELADATOK A SOLVER HASZNÁLATA Werner Ágnes Villamosmérnöki és Információs Rendszerek Tanszék e-mail: werner.agnes@virt.uni-pannon.hu Előadás
Elektromos hajtású tanszéki versenyautó járműdinamikai modellezése Vehicle dynamics modelling of an electric driven race car
 Elektromos hajtású tanszéki versenyautó járműdinamikai modellezése Vehicle dynamics modelling of an electric driven race car A. SZÁNTÓ 1, G. Á. SZÍKI 2, S. HAJDU 3 1Debreceni Egyetem, szanto930922@freemail.hu
Elektromos hajtású tanszéki versenyautó járműdinamikai modellezése Vehicle dynamics modelling of an electric driven race car A. SZÁNTÓ 1, G. Á. SZÍKI 2, S. HAJDU 3 1Debreceni Egyetem, szanto930922@freemail.hu
Intelligens Közlekedési Rendszerek 2
 Intelligens Közlekedési Rendszerek 2 Máté Miklós 2016 Október 11 1 / 14 Szenzor (érzékelő): mérés, detektálás Mérés elmélet emlékeztető Jó mérőműszer tulajdonságai Érzékeny a mérendő tulajdonságra Érzéketlen
Intelligens Közlekedési Rendszerek 2 Máté Miklós 2016 Október 11 1 / 14 Szenzor (érzékelő): mérés, detektálás Mérés elmélet emlékeztető Jó mérőműszer tulajdonságai Érzékeny a mérendő tulajdonságra Érzéketlen
Mobil Gamma-log berendezés hajtásláncának modellezése LOLIMOT használatával
 Mobil Gamma-log berendezés hajtásláncának modellezése LOLIMOT használatával Füvesi Viktor 1, Kovács Ernő 2, Jónap Károly 3, Vörös Csaba 4 1,4 tudományos s. munkatárs, 2 PhD, egyetemi docens, 3 PhD, tudományos
Mobil Gamma-log berendezés hajtásláncának modellezése LOLIMOT használatával Füvesi Viktor 1, Kovács Ernő 2, Jónap Károly 3, Vörös Csaba 4 1,4 tudományos s. munkatárs, 2 PhD, egyetemi docens, 3 PhD, tudományos
VL IT i n du s t ri al Kommunikációs vázlat
 VL IT i n du s t ri al Kommunikációs vázlat k i v it e l A műszaki adatok előzetes ér tesítés nélkül változhatnak. A műszaki adatok előzetes értesítés nélkül változhatnak. VLIT TAG A1 WB ATEX Aktív RFID
VL IT i n du s t ri al Kommunikációs vázlat k i v it e l A műszaki adatok előzetes ér tesítés nélkül változhatnak. A műszaki adatok előzetes értesítés nélkül változhatnak. VLIT TAG A1 WB ATEX Aktív RFID
Mérések és adatok a kézilabdázók teljesítményének prognosztizálásában és növelésében
 Mérések és adatok a kézilabdázók teljesítményének prognosztizálásában és növelésében Prof. Dr. h. c. Mocsai Lajos rektor, egyetemi tanár 2017. október 19. Fejlesztési modell mérési módszertan Sportanalitika
Mérések és adatok a kézilabdázók teljesítményének prognosztizálásában és növelésében Prof. Dr. h. c. Mocsai Lajos rektor, egyetemi tanár 2017. október 19. Fejlesztési modell mérési módszertan Sportanalitika
NGB_KV008_1. TANTÁRGYI TEMATIKA Tantárgy kód
 Oktatási hét 1 2 TANTÁRGYI TEMATIKA Tantárgy kód NGB_KV008_1 Félév (1/2/3) 1. páratlan Tantárgy cím Járműszerkezetek Tantárgy felelős Dr. Varga Zoltán Előadók Dr. Varga Zoltán, Szauter Ferenc Előtanulmányi
Oktatási hét 1 2 TANTÁRGYI TEMATIKA Tantárgy kód NGB_KV008_1 Félév (1/2/3) 1. páratlan Tantárgy cím Járműszerkezetek Tantárgy felelős Dr. Varga Zoltán Előadók Dr. Varga Zoltán, Szauter Ferenc Előtanulmányi
IFFK 2012 Budapest, augusztus
 IFFK 2012 Budapest, 2012. augusztus 29-31. Mérőrendszer építése és eredményeinek feldolgozása a BME járműszimulátor egység mechanikai modelljének fejlesztéséhez Németh Balázs*, Gáspár Péter**, Szalay Zsolt***,
IFFK 2012 Budapest, 2012. augusztus 29-31. Mérőrendszer építése és eredményeinek feldolgozása a BME járműszimulátor egység mechanikai modelljének fejlesztéséhez Németh Balázs*, Gáspár Péter**, Szalay Zsolt***,
HIBRIDJÁRMŰ FEJLESZTÉS GYŐRBEN
 HIBRIDJÁRMŰ FEJLESZTÉS GYŐRBEN KÍSÉRLETI CÉLÚ ELEKTROMOS MEGHAJTÁSÚ EGYETEMI JÁRMŰVEK Szauter Ferenc - Dr. Varga Zoltán - Willisits Vilmos Széchenyi István Egyetem Willisits Mérnökiroda Kft. Járműipari
HIBRIDJÁRMŰ FEJLESZTÉS GYŐRBEN KÍSÉRLETI CÉLÚ ELEKTROMOS MEGHAJTÁSÚ EGYETEMI JÁRMŰVEK Szauter Ferenc - Dr. Varga Zoltán - Willisits Vilmos Széchenyi István Egyetem Willisits Mérnökiroda Kft. Járműipari
JKL rendszerek. Közúti járművek szerkezeti felépítése. Szabó Bálint
 JKL rendszerek Közúti járművek szerkezeti felépítése Szabó Bálint 1 Közúti járművek szerkezeti felépítése Tartalom Bevezetés Járműdinamika Gépjárművek hajtásrendszerei Gépjármű fékrendszerek 2 2 Bevezetés
JKL rendszerek Közúti járművek szerkezeti felépítése Szabó Bálint 1 Közúti járművek szerkezeti felépítése Tartalom Bevezetés Járműdinamika Gépjárművek hajtásrendszerei Gépjármű fékrendszerek 2 2 Bevezetés
Beltéri autonóm négyrotoros helikopter szabályozó rendszerének kifejlesztése és hardware-in-the-loop tesztelése
 Beltéri autonóm négyrotoros helikopter szabályozó rendszerének kifejlesztése és hardware-in-the-loop tesztelése Regula Gergely, Lantos Béla BME Villamosmérnöki és Informatikai Kar Irányítástechnika és
Beltéri autonóm négyrotoros helikopter szabályozó rendszerének kifejlesztése és hardware-in-the-loop tesztelése Regula Gergely, Lantos Béla BME Villamosmérnöki és Informatikai Kar Irányítástechnika és
Pneumatikus hajtású jármű hajtásláncának megtervezése és optimalizációja. Készítette: Vidovics Lajos
 Pneumatikus hajtású jármű hajtásláncának megtervezése és optimalizációja Készítette: Vidovics Lajos Hajtáslánc építés fázisai irodalomkutatás, hajtáslánc koncepciók képzése, pneumatikus elemek kiválasztása,
Pneumatikus hajtású jármű hajtásláncának megtervezése és optimalizációja Készítette: Vidovics Lajos Hajtáslánc építés fázisai irodalomkutatás, hajtáslánc koncepciók képzése, pneumatikus elemek kiválasztása,
Infokommunikáció a közlekedésben (VITMJV27)
") Infokommunikáció a közlekedésben (VITMJV27) Közlekedési információs rendszerek Vidács Attila Távközlési és Médiainformatikai Tsz. I.E.348, T:19-25, vidacs@tmit.bme.hu Tartalom Intelligens közlekedési rendszerek
Infokommunikáció a közlekedésben (VITMJV27) Közlekedési információs rendszerek Vidács Attila Távközlési és Médiainformatikai Tsz. I.E.348, T:19-25, vidacs@tmit.bme.hu Tartalom Intelligens közlekedési rendszerek
Tömegpontok mozgása egyenes mentén, hajítások
 2. gyakorlat 1. Feladatok a kinematika tárgyköréből Tömegpontok mozgása egyenes mentén, hajítások 1.1. Feladat: Mekkora az átlagsebessége annak pontnak, amely mozgásának első szakaszában v 1 sebességgel
2. gyakorlat 1. Feladatok a kinematika tárgyköréből Tömegpontok mozgása egyenes mentén, hajítások 1.1. Feladat: Mekkora az átlagsebessége annak pontnak, amely mozgásának első szakaszában v 1 sebességgel
Villamos autókból álló taxi flotta számára létesítendő töltőállomások modellezése
 Villamos autókból álló taxi flotta számára létesítendő töltőállomások modellezése 62. Vándorgyűlés, konferencia és kiállítás Siófok, 2015. 09. 16-18. Farkas Csaba egyetemi tanársegéd Dr. Dán András professor
Villamos autókból álló taxi flotta számára létesítendő töltőállomások modellezése 62. Vándorgyűlés, konferencia és kiállítás Siófok, 2015. 09. 16-18. Farkas Csaba egyetemi tanársegéd Dr. Dán András professor
A forgalomsűrűség és a követési távolság kapcsolata
 1 A forgalomsűrűség és a követési távolság kapcsolata 6 Az áramlatsűrűség (forgalomsűrűség) a követési távolsággal ad egyértelmű összefüggést: a sűrűség reciprok értéke a(z) (átlagos) követési távolság.
1 A forgalomsűrűség és a követési távolság kapcsolata 6 Az áramlatsűrűség (forgalomsűrűség) a követési távolsággal ad egyértelmű összefüggést: a sűrűség reciprok értéke a(z) (átlagos) követési távolság.
Autonóm járműrendszerek kutatása a zalaegerszegi autonóm tesztpályához kapcsolódóan. Pályázati témák. Téma rövid tartalma
 Pályázati témák 1 2 3 4 5 6 Benzinmotorral szerelt Smart autonóm tesztjármű hibriddé alakítása Benzinmotoros és villamos szinergiájának vizsgálata laboratóriumi próbapad koncepciója laboratóriumi próbapad
Pályázati témák 1 2 3 4 5 6 Benzinmotorral szerelt Smart autonóm tesztjármű hibriddé alakítása Benzinmotoros és villamos szinergiájának vizsgálata laboratóriumi próbapad koncepciója laboratóriumi próbapad
A járművek menetdinamikája. Készítette: Szűcs Tamás
 A járművek menetdinamikája Készítette: Szűcs Tamás 2016 Tartalomjegyzék II. Menetdinamika: 1. Kicsúszási határsebesség 2. Kiborulási határsebesség 3. Komplex feladatok III. Motorjellemzők: 4. Lökettérfogat,
A járművek menetdinamikája Készítette: Szűcs Tamás 2016 Tartalomjegyzék II. Menetdinamika: 1. Kicsúszási határsebesség 2. Kiborulási határsebesség 3. Komplex feladatok III. Motorjellemzők: 4. Lökettérfogat,
ELEKTROMOS MEGHAJTÁSÚ AUTONÓM JÁRMŰ ENERGIAHATÉKONYSÁG NÖVELÉSÉNEK LEHETŐSÉGEI
 ELEKTROMOS MEGHAJTÁSÚ AUTONÓM JÁRMŰ ENERGIAHATÉKONYSÁG NÖVELÉSÉNEK LEHETŐSÉGEI Kőrös Péter, Szakállas Gábor, Szauter Ferenc Autonóm járműrendszerek kutatása a zalaegerszegi autonóm tesztpályához kapcsolódóan
ELEKTROMOS MEGHAJTÁSÚ AUTONÓM JÁRMŰ ENERGIAHATÉKONYSÁG NÖVELÉSÉNEK LEHETŐSÉGEI Kőrös Péter, Szakállas Gábor, Szauter Ferenc Autonóm járműrendszerek kutatása a zalaegerszegi autonóm tesztpályához kapcsolódóan
SZERVIZ SZOLGÁLTATÁS SEBESSÉGVÁLTÓ
 SZERVIZ SZOLGÁLTATÁS SEBESSÉGVÁLTÓ Protruck Kft tevékenysége a haszongépjármű sebességváltók területén A Protruck Kft, mint a ZF magyarországi szervizképviselete, a haszongépjármű szektorban az alábbi
SZERVIZ SZOLGÁLTATÁS SEBESSÉGVÁLTÓ Protruck Kft tevékenysége a haszongépjármű sebességváltók területén A Protruck Kft, mint a ZF magyarországi szervizképviselete, a haszongépjármű szektorban az alábbi
SZENZORFÚZIÓS ELJÁRÁSOK KIDOLGOZÁSA AUTONÓM JÁRMŰVEK PÁLYAKÖVETÉSÉRE ÉS IRÁNYÍTÁSÁRA
 infokommunikációs technológiák SZENZORFÚZIÓS ELJÁRÁSOK KIDOLGOZÁSA AUTONÓM JÁRMŰVEK PÁLYAKÖVETÉSÉRE ÉS IRÁNYÍTÁSÁRA BEVEZETŐ A KUTATÁS CÉLJA Autonóm járművek és robotok esetén elsődleges feladat a robotok
infokommunikációs technológiák SZENZORFÚZIÓS ELJÁRÁSOK KIDOLGOZÁSA AUTONÓM JÁRMŰVEK PÁLYAKÖVETÉSÉRE ÉS IRÁNYÍTÁSÁRA BEVEZETŐ A KUTATÁS CÉLJA Autonóm járművek és robotok esetén elsődleges feladat a robotok
Tájékoztató. Használható segédeszköz: számológép, rajzeszközök
 12/2013. (III. 29.) NFM rendelet szakmai és vizsgakövetelménye alapján. Szakképesítés, azonosító száma és megnevezése 55 525 01 Autótechnikus Tájékoztató A vizsgázó az első lapra írja fel a nevét! Ha a
12/2013. (III. 29.) NFM rendelet szakmai és vizsgakövetelménye alapján. Szakképesítés, azonosító száma és megnevezése 55 525 01 Autótechnikus Tájékoztató A vizsgázó az első lapra írja fel a nevét! Ha a
Robotika. Relatív helymeghatározás Odometria
 Robotika Relatív helymeghatározás Odometria Differenciális hajtás c m =πd n /nc e c m D n C e n = hány mm-t tesz meg a robot egy jeladó impulzusra = névleges kerék átmérő = jeladó fölbontása (impulzus/ford.)
Robotika Relatív helymeghatározás Odometria Differenciális hajtás c m =πd n /nc e c m D n C e n = hány mm-t tesz meg a robot egy jeladó impulzusra = névleges kerék átmérő = jeladó fölbontása (impulzus/ford.)
Járműinformatika Bevezetés
 Járműinformatika Bevezetés 2016/2017. tanév, II. félév Dr. Kovács Szilveszter E-mail: szkovacs@iit.uni-miskolc.hu Informatika Intézet 107/a. Tel: (46) 565-111 / 21-07 Autó elektronika az 1970-es években
Járműinformatika Bevezetés 2016/2017. tanév, II. félév Dr. Kovács Szilveszter E-mail: szkovacs@iit.uni-miskolc.hu Informatika Intézet 107/a. Tel: (46) 565-111 / 21-07 Autó elektronika az 1970-es években
Termékéletciklus-kezelésen alapuló számítógépes tervezés
 Termékéletciklus-kezelésen alapuló számítógépes tervezés Dr. Váradi Károly Farkas Zsolt Budapesti Műszaki és Gazdaságtudományi Egyetem, Gép- és Terméktervezés Tanszék, Piros Attila C3D Műszaki Tanácsadó
Termékéletciklus-kezelésen alapuló számítógépes tervezés Dr. Váradi Károly Farkas Zsolt Budapesti Műszaki és Gazdaságtudományi Egyetem, Gép- és Terméktervezés Tanszék, Piros Attila C3D Műszaki Tanácsadó
1. Egy háromtengelyes tehergépjármű 10 tonna saját tömegű. 130 kn. 7 m. a.) A jármű maximális össztömege 24 tonna lehet.(előadás anyaga)!!!!
 A jármű maximális össztömege 24 tonna lehet.(előadás anyaga)!!!!") TEHERELHELYEZÉS. Egy háromtengelyes tehergépjármű 0 tonna saját tömegű. a.) Ha a járművet a közúti forgalomban kívánja használni, külön engedély nélkül, mekkora lehet a jármű legnagyobb teherbírása? b.)
TEHERELHELYEZÉS. Egy háromtengelyes tehergépjármű 0 tonna saját tömegű. a.) Ha a járművet a közúti forgalomban kívánja használni, külön engedély nélkül, mekkora lehet a jármű legnagyobb teherbírása? b.)
Tehergépkocsi és mezőgazdasági járművek kanyarodási jellemzőinek kísérleti vizsgálata
 Tehergépkocsi és mezőgazdasági járművek kanyarodási jellemzőinek kísérleti vizsgálata Bell Márton*. Mayer Antal**Ignácz Ferenc*** *okl. közlekedésmérnök, IbB Hungary Mérnöki Szakértői Iroda, Budapest,
Tehergépkocsi és mezőgazdasági járművek kanyarodási jellemzőinek kísérleti vizsgálata Bell Márton*. Mayer Antal**Ignácz Ferenc*** *okl. közlekedésmérnök, IbB Hungary Mérnöki Szakértői Iroda, Budapest,
Új hajtásláncok a Volvótól a nagyobb teljesítmény és a kedvezőbb üzemanyagfogyasztás
 Új hajtásláncok a Volvótól a nagyobb teljesítmény és a kedvezőbb üzemanyagfogyasztás érdekében Januárban a Volvo Trucks bemutatta a világ legerősebb, 700 lóerő teljesítményű teherautóját. Most pedig a
Új hajtásláncok a Volvótól a nagyobb teljesítmény és a kedvezőbb üzemanyagfogyasztás érdekében Januárban a Volvo Trucks bemutatta a világ legerősebb, 700 lóerő teljesítményű teherautóját. Most pedig a
Ön a megfelelő mennyiségű és minőségű információk alapján hozza meg döntéseit? Stratis Kft. / Autonomy üzleti reggeli / 2014.10.16.
 Ön a megfelelő mennyiségű és minőségű információk alapján hozza meg döntéseit? Stratis Kft. / Autonomy üzleti reggeli / 2014.10.16. Tracsek Ferenc igazgató Alapvető változások kora Az IT iparágban alapvető
Ön a megfelelő mennyiségű és minőségű információk alapján hozza meg döntéseit? Stratis Kft. / Autonomy üzleti reggeli / 2014.10.16. Tracsek Ferenc igazgató Alapvető változások kora Az IT iparágban alapvető
BME A vizsga dátuma: Név: Gépjárművek tanszék Gépjárművek üzeme tantárgy
 Gépjárművek tanszék Gépjárművek üzeme tantárgy Témakör : Dízel-diagnosztika Feladatok : Ismertesse a dízelmotor fordulatszámmérésének on-board és off-board mérési módszereit, tételesen ismertesse az összetartozó
Gépjárművek tanszék Gépjárművek üzeme tantárgy Témakör : Dízel-diagnosztika Feladatok : Ismertesse a dízelmotor fordulatszámmérésének on-board és off-board mérési módszereit, tételesen ismertesse az összetartozó
Alapozó terepgyakorlat Klimatológia
 Alapozó terepgyakorlat Klimatológia Gál Tamás PhD hallgató tgal@geo.u-szeged.hu SZTE Éghajlattani és Tájföldrajzi Tanszék 2008. július 05. Alapozó terepgyakorlat - Klimatológia ALAPOZÓ TEREPGYAKORLAT -
Alapozó terepgyakorlat Klimatológia Gál Tamás PhD hallgató tgal@geo.u-szeged.hu SZTE Éghajlattani és Tájföldrajzi Tanszék 2008. július 05. Alapozó terepgyakorlat - Klimatológia ALAPOZÓ TEREPGYAKORLAT -
AMBER ONE PROJEKT: ELEKTROMOS SPORTAUTÓ FEJLESZTÉS EGY ÉV ALATT NULLÁRÓL
 AMBER ONE PROJEKT: ELEKTROMOS SPORTAUTÓ FEJLESZTÉS EGY ÉV ALATT NULLÁRÓL Jármű szintű parametrikus modellezés a hatékony munka érdekében Előadók: Székely Béla, Székely András TARTALOM Amber One Projekt
AMBER ONE PROJEKT: ELEKTROMOS SPORTAUTÓ FEJLESZTÉS EGY ÉV ALATT NULLÁRÓL Jármű szintű parametrikus modellezés a hatékony munka érdekében Előadók: Székely Béla, Székely András TARTALOM Amber One Projekt
Automatikus szivárgáskeresés Zajszint-adatgyűjtő hálózat korrelátoros funkcióval
 Automatikus szivárgáskeresés Zajszint-adatgyűjtő hálózat korrelátoros funkcióval Sebalog N-3 hálózat Aktuális mérési adatok minden nap Nincs szükség a loggerek helyszínen történő kiolvasására Távolról
Automatikus szivárgáskeresés Zajszint-adatgyűjtő hálózat korrelátoros funkcióval Sebalog N-3 hálózat Aktuális mérési adatok minden nap Nincs szükség a loggerek helyszínen történő kiolvasására Távolról
1. Feladatok a dinamika tárgyköréből
 1. Feladatok a dinamika tárgyköréből Newton három törvénye 1.1. Feladat: Három azonos m tömegű gyöngyszemet fonálra fűzünk, egymástól kis távolságokban a fonálhoz rögzítünk, és az elhanyagolható tömegű
1. Feladatok a dinamika tárgyköréből Newton három törvénye 1.1. Feladat: Három azonos m tömegű gyöngyszemet fonálra fűzünk, egymástól kis távolságokban a fonálhoz rögzítünk, és az elhanyagolható tömegű
Hő- és füstelvezetés, elmélet-gyakorlat
 Hő- és füstelvezetés, elmélet-gyakorlat Mérnöki módszerek alkalmazásának lehetőségei Szikra Csaba tudományos munkatárs BME Építészmérnöki Kar Épületenergetikai és Épületgépészeti Tanszék szikra@egt.bme.hu
Hő- és füstelvezetés, elmélet-gyakorlat Mérnöki módszerek alkalmazásának lehetőségei Szikra Csaba tudományos munkatárs BME Építészmérnöki Kar Épületenergetikai és Épületgépészeti Tanszék szikra@egt.bme.hu
Ütközések vizsgálatához alkalmazható számítási eljárások
 Ütközések vizsgálatához alkalmazható számítási eljárások Az eljárások a kiindulási adatoktól és a számítás menetétől függően két csoportba sorolhatók. Az egyik a visszafelé történő számítások csoportja,
Ütközések vizsgálatához alkalmazható számítási eljárások Az eljárások a kiindulási adatoktól és a számítás menetétől függően két csoportba sorolhatók. Az egyik a visszafelé történő számítások csoportja,
Autóipari beágyazott rendszerek. Kockázatelemzés
 Autóipari beágyazott rendszerek Kockázatelemzés 1 Biztonságkritikus rendszer Beágyazott rendszer Aminek hibája Anyagi vagyont, vagy Emberéletet veszélyeztet Tipikus példák ABS, ESP, elektronikus szervokormány
Autóipari beágyazott rendszerek Kockázatelemzés 1 Biztonságkritikus rendszer Beágyazott rendszer Aminek hibája Anyagi vagyont, vagy Emberéletet veszélyeztet Tipikus példák ABS, ESP, elektronikus szervokormány
VTOL UAV. Moduláris fedélzeti elektronika fejlesztése pilóta nélküli repülőgépek számára. Árvai László, Doktorandusz, ZMNE ÁRVAI LÁSZLÓ, ZMNE
 Moduláris fedélzeti elektronika fejlesztése pilóta nélküli repülőgépek számára Árvai László, Doktorandusz, ZMNE Tartalom Fejezet Témakör 1. Fedélzeti elektronika tulajdonságai 2. Modularitás 3. Funkcionális
Moduláris fedélzeti elektronika fejlesztése pilóta nélküli repülőgépek számára Árvai László, Doktorandusz, ZMNE Tartalom Fejezet Témakör 1. Fedélzeti elektronika tulajdonságai 2. Modularitás 3. Funkcionális
Mit nevezünk nehézségi erőnek?
 Mit nevezünk nehézségi erőnek? Azt az erőt, amelynek hatására a szabadon eső testek g (gravitációs) gyorsulással esnek a vonzó test centruma felé, nevezzük nehézségi erőnek. F neh = m g Mi a súly? Azt
Mit nevezünk nehézségi erőnek? Azt az erőt, amelynek hatására a szabadon eső testek g (gravitációs) gyorsulással esnek a vonzó test centruma felé, nevezzük nehézségi erőnek. F neh = m g Mi a súly? Azt
Autonóm járművek városi közlekedésének kihívásai
 Autonóm járművek városi közlekedésének kihívásai Dr. Szalay Zsolt Dr. Schuchmann Gábor BME GJT, tanszékvezető egyetemi docens BME UVT, egyetemi docens 1 Kihívás Alkalmasság Jármű specifikációja Pályával
Autonóm járművek városi közlekedésének kihívásai Dr. Szalay Zsolt Dr. Schuchmann Gábor BME GJT, tanszékvezető egyetemi docens BME UVT, egyetemi docens 1 Kihívás Alkalmasság Jármű specifikációja Pályával
A debreceni alapéghajlati állomás, az OMSZ háttérklíma hálózatának bővített mérési programmal rendelkező mérőállomása
 1 A debreceni alapéghajlati állomás, az OMSZ háttérklíma hálózatának bővített mérési programmal rendelkező mérőállomása Nagy Zoltán Dr. Szász Gábor Debreceni Brúnó OMSZ Megfigyelési Főosztály Debreceni
1 A debreceni alapéghajlati állomás, az OMSZ háttérklíma hálózatának bővített mérési programmal rendelkező mérőállomása Nagy Zoltán Dr. Szász Gábor Debreceni Brúnó OMSZ Megfigyelési Főosztály Debreceni
SZÁMÍTÓGÉPES PROBLÉMAMEGOLDÁS
 Dr. Pál László, Sapientia EMTE, Csíkszereda SZÁMÍTÓGÉPES PROBLÉMAMEGOLDÁS 9.ELŐADÁS Lehetőségelemzés Lehetőségelemzés Egy olyan funkció, amely segítségével úgy tudunk megváltoztatni adatainkat, hogy a
Dr. Pál László, Sapientia EMTE, Csíkszereda SZÁMÍTÓGÉPES PROBLÉMAMEGOLDÁS 9.ELŐADÁS Lehetőségelemzés Lehetőségelemzés Egy olyan funkció, amely segítségével úgy tudunk megváltoztatni adatainkat, hogy a
Quadkopter szimulációja LabVIEW környezetben Simulation of a Quadcopter with LabVIEW
 Quadkopter szimulációja LabVIEW környezetben Simulation of a Quadcopter with LabVIEW T. KISS 1 P. T. SZEMES 2 1University of Debrecen, kiss.tamas93@gmail.com 2University of Debrecen, szemespeter@eng.unideb.hu
Quadkopter szimulációja LabVIEW környezetben Simulation of a Quadcopter with LabVIEW T. KISS 1 P. T. SZEMES 2 1University of Debrecen, kiss.tamas93@gmail.com 2University of Debrecen, szemespeter@eng.unideb.hu
ZF automata sebességváltó a közlekedésbiztonságért. Tata, Czakó László Protruck Kft
 ZF automata sebességváltó a közlekedésbiztonságért Tata, 2016.12.01 Czakó László Protruck Kft TB Busz-hajtástechnika Hybrid Automata sebességváltó HyLife Manuális sebességváltó EcoLife Automatizált sebességváltó
ZF automata sebességváltó a közlekedésbiztonságért Tata, 2016.12.01 Czakó László Protruck Kft TB Busz-hajtástechnika Hybrid Automata sebességváltó HyLife Manuális sebességváltó EcoLife Automatizált sebességváltó
28. Nagy László Fizikaverseny Szalézi Szent Ferenc Gimnázium, Kazincbarcika február 28. március osztály
 1. feladat a) A négyzet alakú vetítővászon egy oldalának hossza 1,2 m. Ahhoz, hogy a legnagyobb nagyításban is ráférjen a diafilm-kocka képe a vászonra, és teljes egészében látható legyen, ahhoz a 36 milliméteres
1. feladat a) A négyzet alakú vetítővászon egy oldalának hossza 1,2 m. Ahhoz, hogy a legnagyobb nagyításban is ráférjen a diafilm-kocka képe a vászonra, és teljes egészében látható legyen, ahhoz a 36 milliméteres
Vállalati információs rendszerek I, MIN5B6IN, 5 kredit, K. 4. A meghirdetés ideje (mintatanterv szerint vagy keresztfélében):
:") Követelményrendszer 1. Tantárgynév, kód, kredit, választhatóság: Vállalati információs rendszerek I, MIN5B6IN, 5 kredit, K 2. Felelős tanszék: Informatika Szakcsoport 3. Szak, szakirány, tagozat: Műszaki
Követelményrendszer 1. Tantárgynév, kód, kredit, választhatóság: Vállalati információs rendszerek I, MIN5B6IN, 5 kredit, K 2. Felelős tanszék: Informatika Szakcsoport 3. Szak, szakirány, tagozat: Műszaki
Versenyautó futóművek. Járműdinamikai érdekességek a versenyautók világából
 Versenyutó futóművek Járműdinmiki érdekességek versenyutók világából Trtlom Bevezetés Alpfoglmk A gumibroncs Futómű geometri Átterhelődések Futómű kinemtik 2 Trtlom 2 Bevezetés Bevezetés Alpfoglmk A gumibroncs
Versenyutó futóművek Járműdinmiki érdekességek versenyutók világából Trtlom Bevezetés Alpfoglmk A gumibroncs Futómű geometri Átterhelődések Futómű kinemtik 2 Trtlom 2 Bevezetés Bevezetés Alpfoglmk A gumibroncs
BEMUTATÓ FELADATOK (2) ÁLTALÁNOS GÉPTAN tárgyból
 ÁLTALÁNOS GÉPTAN tárgyból") BEMUTATÓ FELADATOK () 1/() Egy mozdony vízszintes 600 m-es pályaszakaszon 150 kn állandó húzóer t fejt ki. A vonat sebessége 36 km/h-ról 54 km/h-ra növekszik. A vonat tömege 1000 Mg. a.) Mekkora a mozgási
BEMUTATÓ FELADATOK () 1/() Egy mozdony vízszintes 600 m-es pályaszakaszon 150 kn állandó húzóer t fejt ki. A vonat sebessége 36 km/h-ról 54 km/h-ra növekszik. A vonat tömege 1000 Mg. a.) Mekkora a mozgási
Teljes körű weboldal, API és DDoS védelmi szolgáltatás
 Közép-európai disztribútorunk a Yellow Cube. www.greywizard.com www.yellowcube.eu Teljes körű weboldal, API és DDoS védelmi szolgáltatás A Grey Wizard weboldalak, webshopok és API-k védelmét biztosító,
Közép-európai disztribútorunk a Yellow Cube. www.greywizard.com www.yellowcube.eu Teljes körű weboldal, API és DDoS védelmi szolgáltatás A Grey Wizard weboldalak, webshopok és API-k védelmét biztosító,
STATISZTIKA I. Centrális mutatók. Helyzeti középértékek. Középértékek. Bimodális eloszlás, U. Módusz, Mo. 4. Előadás.
 Centrális mutatók STATISZTIKA I. 4. Előadás Centrális mutatók 1/51 2/51 Középértékek Helyzeti középértékek A meghatározása gyakoriság vagy sorszám alapján Számítás nélkül Az elemek nagyság szerint rendezett
Centrális mutatók STATISZTIKA I. 4. Előadás Centrális mutatók 1/51 2/51 Középértékek Helyzeti középértékek A meghatározása gyakoriság vagy sorszám alapján Számítás nélkül Az elemek nagyság szerint rendezett
Ez a paraméter arra szolgál, hogy kompenzáljuk a nem megfelelõ orsózási sebesség beállítást a rádión. Pl, ha a rádióban maximumon van az AILERON
 Ez a paraméter arra szolgál, hogy kompenzáljuk a nem megfelelõ orsózási sebesség beállítást a rádión. Pl, ha a rádióban maximumon van az AILERON SWASH AFR, de az orsózási sebesség nem megfelelõen nagy,
Ez a paraméter arra szolgál, hogy kompenzáljuk a nem megfelelõ orsózási sebesség beállítást a rádión. Pl, ha a rádióban maximumon van az AILERON SWASH AFR, de az orsózási sebesség nem megfelelõen nagy,
Gyalogos elütések szimulációs vizsgálata
 Gyalogos elütések szimulációs vizsgálata A Virtual Crash program validációja Dr. Melegh Gábor BME Gépjárművek tanszék Budapest, Magyarország Vida Gábor BME Gépjárművek tanszék Budapest, Magyarország Ing.
Gyalogos elütések szimulációs vizsgálata A Virtual Crash program validációja Dr. Melegh Gábor BME Gépjárművek tanszék Budapest, Magyarország Vida Gábor BME Gépjárművek tanszék Budapest, Magyarország Ing.
Kamerakalibráció és pozícióbecslés érzékenységi analízissel, sík mintázatokból. Dabóczi Tamás (BME MIT), Fazekas Zoltán (MTA SZTAKI)
, Fazekas Zoltán (MTA SZTAKI)") , 2008 feb. 4-5 Kamerakalibráció és pozícióbecslés érzékenységi Bódis-Szomorú András Dabóczi Tamás (BME MIT), Fazekas Zoltán (MTA SZTAKI) Méréstechnika- és Információs Rendszerek Tanszék BME Rendszer-
, 2008 feb. 4-5 Kamerakalibráció és pozícióbecslés érzékenységi Bódis-Szomorú András Dabóczi Tamás (BME MIT), Fazekas Zoltán (MTA SZTAKI) Méréstechnika- és Információs Rendszerek Tanszék BME Rendszer-
Kerékagymotoros Formula Student versenyautó menetdinamikai szimulációja
 bmemotion Kerékagymotoros Formula Student versenyautó menetdinamikai szimulációja Csortán-Szilágyi György Dorogi János Nagy Ádám Célunk Fő célunk: Villamos hajtású versenyautó tervezése és építése - részvétel
bmemotion Kerékagymotoros Formula Student versenyautó menetdinamikai szimulációja Csortán-Szilágyi György Dorogi János Nagy Ádám Célunk Fő célunk: Villamos hajtású versenyautó tervezése és építése - részvétel
Minőségbiztosítás a hegesztésben. Méréstechnika. Előadó: Nagy Ferenc
 Minőségbiztosítás a hegesztésben Méréstechnika Minőségbiztosítás és -felügyelet HKS termékportfólió: ívhegesztéshez Dokumentálás Felügyelet / Hiba-felismerés WeldScanner WeldQAS ThermoProfilScanner Hegesztési
Minőségbiztosítás a hegesztésben Méréstechnika Minőségbiztosítás és -felügyelet HKS termékportfólió: ívhegesztéshez Dokumentálás Felügyelet / Hiba-felismerés WeldScanner WeldQAS ThermoProfilScanner Hegesztési
Járműkövető rendszer RÉSZLETES ISMERTETŐ
 efollow Járműkövető rendszer RÉSZLETES ISMERTETŐ Tartalomjegyzék 1.1. BEVEZETÉS...3 1.2. JÁRMŰKÖVETŐ RENDSZER FELADATA...3 2.1. MIT TUD AZ EFOLLOW?...3 2.2. MILYEN JÁRMŰADATOKAT MÉR JELENLEG A RENDSZER?...3
efollow Járműkövető rendszer RÉSZLETES ISMERTETŐ Tartalomjegyzék 1.1. BEVEZETÉS...3 1.2. JÁRMŰKÖVETŐ RENDSZER FELADATA...3 2.1. MIT TUD AZ EFOLLOW?...3 2.2. MILYEN JÁRMŰADATOKAT MÉR JELENLEG A RENDSZER?...3
Szállító eszközök a rönktéren. Fűrészipari technológia I. előadás
 Szállító eszközök a rönktéren Dr.Gerencsér Kinga 1 A szállító eszköz kiválasztása Fafaj, tömeg, alak és méret Évente feldolgozott mennyiség Műszakteljesítmény Nagy szállító- és emelő berendezésre kell
Szállító eszközök a rönktéren Dr.Gerencsér Kinga 1 A szállító eszköz kiválasztása Fafaj, tömeg, alak és méret Évente feldolgozott mennyiség Műszakteljesítmény Nagy szállító- és emelő berendezésre kell
A nagyobb tömegű Peti 1,5 m-re ült a forgástengelytől. Összesen: 9p
 Jedlik 9-10. o. reg feladat és megoldás 1) Egy 5 m hosszú libikókán hintázik Évi és Peti. A gyerekek tömege 30 kg és 50 kg. Egyikük a hinta végére ült. Milyen messze ült a másik gyerek a forgástengelytől,
Jedlik 9-10. o. reg feladat és megoldás 1) Egy 5 m hosszú libikókán hintázik Évi és Peti. A gyerekek tömege 30 kg és 50 kg. Egyikük a hinta végére ült. Milyen messze ült a másik gyerek a forgástengelytől,
A MODELLALKOTÁS ELVEI ÉS MÓDSZEREI
 SZENT ISTVÁN EGYETEM GÖDÖLLŐ MECHANIKAI ÉS GÉPTANI INTÉZET A MODELLALKOTÁS ELVEI ÉS MÓDSZEREI Dr. M. Csizmadia Béla egyetemi tanár, az MMK Gépészeti Tagozatának elnöke Budapest 2013. október. 25. BPMK
SZENT ISTVÁN EGYETEM GÖDÖLLŐ MECHANIKAI ÉS GÉPTANI INTÉZET A MODELLALKOTÁS ELVEI ÉS MÓDSZEREI Dr. M. Csizmadia Béla egyetemi tanár, az MMK Gépészeti Tagozatának elnöke Budapest 2013. október. 25. BPMK
KUTATÁSI JELENTÉS. Multilaterációs radarrendszer kutatása. Szüllő Ádám
 KUTATÁSI JELENTÉS Multilaterációs radarrendszer kutatása Szüllő Ádám 212 Bevezetés A Mikrohullámú Távérzékelés Laboratórium jelenlegi K+F tevékenységei közül ezen jelentés a multilaterációs radarrendszerek
KUTATÁSI JELENTÉS Multilaterációs radarrendszer kutatása Szüllő Ádám 212 Bevezetés A Mikrohullámú Távérzékelés Laboratórium jelenlegi K+F tevékenységei közül ezen jelentés a multilaterációs radarrendszerek
Hibadetektáló rendszer légtechnikai berendezések számára
 Hibadetektáló rendszer légtechnikai berendezések számára Tudományos Diákköri Konferencia A feladatunk Légtechnikai berendezések Monitorozás Hibadetektálás Újrataníthatóság A megvalósítás Mozgásérzékelő
Hibadetektáló rendszer légtechnikai berendezések számára Tudományos Diákköri Konferencia A feladatunk Légtechnikai berendezések Monitorozás Hibadetektálás Újrataníthatóság A megvalósítás Mozgásérzékelő
Légfékes pótkocsik tervezése, kivitelezése és ellenőrzése
 Légfékes pótkocsik tervezése, kivitelezése és ellenőrzése A légfékes pótkocsik engedélyezési eljárásához szükséges fékvizsgálatai során számos érdekes tapasztalatra tettünk szert. A járművek tervezésekor
Légfékes pótkocsik tervezése, kivitelezése és ellenőrzése A légfékes pótkocsik engedélyezési eljárásához szükséges fékvizsgálatai során számos érdekes tapasztalatra tettünk szert. A járművek tervezésekor
- a korábbi jól bevált sorozat típusok a következők voltak: POK-F-DO illetve POK-T-DO
 - Műszaki adatok - Bekötés - Érzékelők Rádiókommunikáció Vezetéknélküli kommunikáció az oldott-oxigén mérő és az oldott-oxigén-tükör vagy az AQUADAT készülék között. Utólagos műszerezéseknél megtakarítható
- Műszaki adatok - Bekötés - Érzékelők Rádiókommunikáció Vezetéknélküli kommunikáció az oldott-oxigén mérő és az oldott-oxigén-tükör vagy az AQUADAT készülék között. Utólagos műszerezéseknél megtakarítható
Pálya : Az a vonal, amelyen a mozgó test végighalad. Út: A pályának az a része, amelyet adott idő alatt a mozgó tárgy megtesz.
 Haladó mozgások A hely és a mozgás viszonylagos. A testek helyét, mozgását valamilyen vonatkoztatási ponthoz, vonatkoztatási rendszerhez képest adjuk meg, ahhoz viszonyítjuk. pl. A vonatban utazó ember
Haladó mozgások A hely és a mozgás viszonylagos. A testek helyét, mozgását valamilyen vonatkoztatási ponthoz, vonatkoztatási rendszerhez képest adjuk meg, ahhoz viszonyítjuk. pl. A vonatban utazó ember
Vizuális adatelemzés - Gyakorlat. Budapesti Műszaki és Gazdaságtudományi Egyetem Méréstechnika és Információs Rendszerek Tanszék
 Vizuális adatelemzés - Gyakorlat Budapesti Műszaki és Gazdaságtudományi Egyetem Méréstechnika és Információs Rendszerek Tanszék Adatelemzés szerepe a rendszermodellezésben Lényeges paraméterek meghatározása
Vizuális adatelemzés - Gyakorlat Budapesti Műszaki és Gazdaságtudományi Egyetem Méréstechnika és Információs Rendszerek Tanszék Adatelemzés szerepe a rendszermodellezésben Lényeges paraméterek meghatározása
BEVEZETÉS AZ ELŐADÁS BETEKINTÉST AD A HATÓSÁG SZÉLESSÁV-MÉRŐ PROGRAMJÁBA. 2012.10.16. 2
 2 BEVEZETÉS AZ NEMZETI MÉDIA-ÉS HÍRKÖZLÉSI HATÓSÁG ELKÖTELEZETT A SZÉLESSÁVÚ SZOLGÁLTATÁSOK ELTERJEDÉSÉNEK ELŐSEGÍTÉSÉBEN, A FOGYASZTÓI TUDATOSSÁG NÖVELÉSÉBEN. A FOGYASZTÓ ÁLTALÁBAN GYAKRAN AZ ISMERETEK
2 BEVEZETÉS AZ NEMZETI MÉDIA-ÉS HÍRKÖZLÉSI HATÓSÁG ELKÖTELEZETT A SZÉLESSÁVÚ SZOLGÁLTATÁSOK ELTERJEDÉSÉNEK ELŐSEGÍTÉSÉBEN, A FOGYASZTÓI TUDATOSSÁG NÖVELÉSÉBEN. A FOGYASZTÓ ÁLTALÁBAN GYAKRAN AZ ISMERETEK
Súlytámfal ellenőrzése
 3. számú mérnöki kézikönyv Frissítve: 2016. Február Súlytámfal ellenőrzése Program: Súlytámfal Fájl: Demo_manual_03.gtz Ebben a fejezetben egy meglévő súlytámfal számítását mutatjuk be állandó és rendkívüli
3. számú mérnöki kézikönyv Frissítve: 2016. Február Súlytámfal ellenőrzése Program: Súlytámfal Fájl: Demo_manual_03.gtz Ebben a fejezetben egy meglévő súlytámfal számítását mutatjuk be állandó és rendkívüli
TECHNIKAI SZABÁLYZAT A PQC KUPA VERSENYEKHEZ
 TECHNIKAI SZABÁLYZAT A PQC KUPA VERSENYEKHEZ 2015 1. Definíció: Quad: Négykerekű, kormánnyal direkt módon irányított, kettő vagy több kerék meghajtású, maximum 2 személy szállítására alkalmas olyan jármű
TECHNIKAI SZABÁLYZAT A PQC KUPA VERSENYEKHEZ 2015 1. Definíció: Quad: Négykerekű, kormánnyal direkt módon irányított, kettő vagy több kerék meghajtású, maximum 2 személy szállítására alkalmas olyan jármű
CITROËN JUMPER Tehergépkocsi
 CITROËN JUMPER Tehergépkocsi Műszaki jellemzők 2016 Motor BlueHDi 110 BlueHDi 130 BlueHDi 160 hengerek száma 4 4 4 hengerűrtartalom (cm 3 ) 1997 1997 1997 max. teljesítmény KW / LE (ford./perc) 81 / 110
CITROËN JUMPER Tehergépkocsi Műszaki jellemzők 2016 Motor BlueHDi 110 BlueHDi 130 BlueHDi 160 hengerek száma 4 4 4 hengerűrtartalom (cm 3 ) 1997 1997 1997 max. teljesítmény KW / LE (ford./perc) 81 / 110
Korszerű technológiák: zsugorodás-kompenzált és magasraktári ipari padlók
 Budapesti Műszaki és Gazdaságtudományi Egyetem Korszerű technológiák: zsugorodás-kompenzált és magasraktári ipari padlók Dr. Zsigovics István adjunktus, Építőanyagok és Mérnökgeológia Tanszék, BME Epo-Trend,
Budapesti Műszaki és Gazdaságtudományi Egyetem Korszerű technológiák: zsugorodás-kompenzált és magasraktári ipari padlók Dr. Zsigovics István adjunktus, Építőanyagok és Mérnökgeológia Tanszék, BME Epo-Trend,
Hő- és füstelvezetés, elmélet-gyakorlat
 Hő- és füstelvezetés, elmélet-gyakorlat Mérnöki módszerek alkalmazásának lehetőségei Szikra Csaba tudományos munkatárs BME Építészmérnöki Kar Épületenergetikai és Épületgépészeti Tanszék szikra@egt.bme.hu
Hő- és füstelvezetés, elmélet-gyakorlat Mérnöki módszerek alkalmazásának lehetőségei Szikra Csaba tudományos munkatárs BME Építészmérnöki Kar Épületenergetikai és Épületgépészeti Tanszék szikra@egt.bme.hu
AL Priority frissítés október
 AL Priority frissítés - 2015. október Lézeres távolságtartó (LCC, ACC) szûrés, fejlesztett blokkolási teljesítmény, köridõ mérési új funkció - megérkezett az új AL Priority frissítés! {jumi [*3]} A menetrend
AL Priority frissítés - 2015. október Lézeres távolságtartó (LCC, ACC) szûrés, fejlesztett blokkolási teljesítmény, köridõ mérési új funkció - megérkezett az új AL Priority frissítés! {jumi [*3]} A menetrend
ÚJ CITROËN JUMPER Tehergépkocsi
 ÚJ CITROËN JUMPER Tehergépkocsi Műszaki jellemzők 2014 új Jumper általános műszaki jellemzők Motor HDi 110 HDi 130 HDi 150 HDi 180 hengerek száma 4 4 4 4 hengerűrtartalom (cm 3 ) 2198 2198 2198 2998 max.
ÚJ CITROËN JUMPER Tehergépkocsi Műszaki jellemzők 2014 új Jumper általános műszaki jellemzők Motor HDi 110 HDi 130 HDi 150 HDi 180 hengerek száma 4 4 4 4 hengerűrtartalom (cm 3 ) 2198 2198 2198 2998 max.
Számítógépes döntéstámogatás OPTIMALIZÁLÁSI FELADATOK A SOLVER HASZNÁLATA
 SZDT-04 p. 1/30 Számítógépes döntéstámogatás OPTIMALIZÁLÁSI FELADATOK A SOLVER HASZNÁLATA Werner Ágnes Villamosmérnöki és Információs Rendszerek Tanszék e-mail: werner.agnes@virt.uni-pannon.hu Előadás
SZDT-04 p. 1/30 Számítógépes döntéstámogatás OPTIMALIZÁLÁSI FELADATOK A SOLVER HASZNÁLATA Werner Ágnes Villamosmérnöki és Információs Rendszerek Tanszék e-mail: werner.agnes@virt.uni-pannon.hu Előadás
Nemzeti Közlekedési Napok 2013
 Nemzeti Közlekedési Napok 2013 Korszerű Diesel emisszió mérés Előadó: Zentai Tamás, Délceg Zsolt Átfogó megközelítés: mi a jelenlegi helyzet A Diesel motor hazánk közlekedésének meghatározó erőforrása
Nemzeti Közlekedési Napok 2013 Korszerű Diesel emisszió mérés Előadó: Zentai Tamás, Délceg Zsolt Átfogó megközelítés: mi a jelenlegi helyzet A Diesel motor hazánk közlekedésének meghatározó erőforrása
Pálya : Az a vonal, amelyen a mozgó tárgy, test végighalad. Út: A pályának az a része, amelyet adott idő alatt a mozgó tárgy megtesz.
 Haladó mozgások A hely és a mozgás viszonylagos. A testek helyét, mozgását valamilyen vonatkoztatási ponthoz, vonatkoztatási rendszerhez képest adjuk meg, ahhoz viszonyítjuk. pl. A vonatban utazó ember
Haladó mozgások A hely és a mozgás viszonylagos. A testek helyét, mozgását valamilyen vonatkoztatási ponthoz, vonatkoztatási rendszerhez képest adjuk meg, ahhoz viszonyítjuk. pl. A vonatban utazó ember
Hőmennyiségmérés a lakásokon innen és túl Danfoss hőmennyiség mérőkkel. 1 SonoSelect heat meter
 Hőmennyiségmérés a lakásokon innen és túl Danfoss hőmennyiség mérőkkel 1 SonoSelect heat meter Hőmennyiségmérés(fűtés vagy hűtés) alapjai Mi is a fűtési(hűtési) hőmennyiségmérő? A fűtési (hűtési) hőmennyiségmérő
Hőmennyiségmérés a lakásokon innen és túl Danfoss hőmennyiség mérőkkel 1 SonoSelect heat meter Hőmennyiségmérés(fűtés vagy hűtés) alapjai Mi is a fűtési(hűtési) hőmennyiségmérő? A fűtési (hűtési) hőmennyiségmérő
Robotok inverz geometriája
 Robotok inverz geometriája. A gyakorlat célja Inverz geometriai feladatot megvalósító függvények implementálása. A megvalósított függvénycsomag tesztelése egy kétszabadságfokú kar előírt végberendezés
Robotok inverz geometriája. A gyakorlat célja Inverz geometriai feladatot megvalósító függvények implementálása. A megvalósított függvénycsomag tesztelése egy kétszabadságfokú kar előírt végberendezés
V2I - Infrastruktúra
 V2I - Infrastruktúra Intelligens közlekedési rendszerek VITMMA10 Okos város MSc mellékspecializáció Simon Csaba ITS hálózat az infrastruktúra oldal ITS hálózat (ism) V2V OBU On Board Unit Ad hoc hálózat
V2I - Infrastruktúra Intelligens közlekedési rendszerek VITMMA10 Okos város MSc mellékspecializáció Simon Csaba ITS hálózat az infrastruktúra oldal ITS hálózat (ism) V2V OBU On Board Unit Ad hoc hálózat
Az informáci. Forczek Erzsébet SZTE, ÁOK Orvosi Informatikai Intézet. 2009. május 24-25.
 Az informáci ció életútjatja Forczek Erzsébet SZTE, ÁOK Orvosi Informatikai Intézet 2009. május 24-25. Mit oktassunk nem informatika szakos hallgatóknak? ( orvos, gyógyszerész, főiskolai: ápoló, gyógytornász,
Az informáci ció életútjatja Forczek Erzsébet SZTE, ÁOK Orvosi Informatikai Intézet 2009. május 24-25. Mit oktassunk nem informatika szakos hallgatóknak? ( orvos, gyógyszerész, főiskolai: ápoló, gyógytornász,
Alacsony fogyasztású IoT rádiós technológiák
 Alacsony fogyasztású IoT rádiós technológiák Fehér Gábor - BME Távközlési és Médiainformatikai Tanszék 4. Magyar Jövő Internet Konferencia és Okos Város Kiállítás 2017. november 8. Miről is lesz szó? Miért
Alacsony fogyasztású IoT rádiós technológiák Fehér Gábor - BME Távközlési és Médiainformatikai Tanszék 4. Magyar Jövő Internet Konferencia és Okos Város Kiállítás 2017. november 8. Miről is lesz szó? Miért
ROSENBERG AUTOMATIKA ÉS SMART AIRBOX LÉGKEZELŐGÉPEK
 ROSENBERG AUTOMATIKA ÉS SMART AIRBOX LÉGKEZELŐGÉPEK Rosenberg Hungária Lég- és Klímatechnikai Kft. 2532 Tokodaltáró, József Attila út 32-34. Telefon+36/33-515-515 Fax +36/33-515-500 Internet: www.rosenberg.hu
ROSENBERG AUTOMATIKA ÉS SMART AIRBOX LÉGKEZELŐGÉPEK Rosenberg Hungária Lég- és Klímatechnikai Kft. 2532 Tokodaltáró, József Attila út 32-34. Telefon+36/33-515-515 Fax +36/33-515-500 Internet: www.rosenberg.hu
Gépészeti rendszertechnika (NGB_KV002_1)
") Gépészeti rendszertechnika (NGB_KV002_1) 6. Óra Kőrös Péter Közúti és Vasúti Járművek Tanszék Tanszéki mérnök (IS201 vagy a tanszéken) E-mail: korosp@ga.sze.hu Web: http://www.sze.hu/~korosp http://www.sze.hu/~korosp/gepeszeti_rendszertechnika/
Gépészeti rendszertechnika (NGB_KV002_1) 6. Óra Kőrös Péter Közúti és Vasúti Járművek Tanszék Tanszéki mérnök (IS201 vagy a tanszéken) E-mail: korosp@ga.sze.hu Web: http://www.sze.hu/~korosp http://www.sze.hu/~korosp/gepeszeti_rendszertechnika/
Szinkronizmusból való kiesés elleni védelmi funkció
 Budapest, 2011. december Szinkronizmusból való kiesés elleni védelmi funkció Szinkronizmusból való kiesés elleni védelmi funkciót főleg szinkron generátorokhoz alkalmaznak. Ha a generátor kiesik a szinkronizmusból,
Budapest, 2011. december Szinkronizmusból való kiesés elleni védelmi funkció Szinkronizmusból való kiesés elleni védelmi funkciót főleg szinkron generátorokhoz alkalmaznak. Ha a generátor kiesik a szinkronizmusból,
Hotspot környezetek. Sándor Tamás. főmérnök. SCI-Network Távközlési és Hálózatintegrációs Rt. T.: 467-70-30 F.: 467-70-49. info@scinetwork.
 SCI-Network Távközlési és Hálózatintegrációs Rt. Hotspot környezetek T.: 467-70-30 F.: 467-70-49 info@scinetwork.hu www.scinetwork.hu Sándor Tamás főmérnök Nem tudtuk, hogy lehetetlen, ezért megcsináltuk.
SCI-Network Távközlési és Hálózatintegrációs Rt. Hotspot környezetek T.: 467-70-30 F.: 467-70-49 info@scinetwork.hu www.scinetwork.hu Sándor Tamás főmérnök Nem tudtuk, hogy lehetetlen, ezért megcsináltuk.