INTELLIGENS TERMÉKEK ELEMEI AKTUÁTOROK
|
|
|
- Anna Kovács
- 6 évvel ezelőtt
- Látták:
Átírás
1 INTELLIGENS TERMÉKEK ELEMEI AKTUÁTOROK Dr. Fekete Róbert Tamás adjunktus Mechatronika, Optika és Gépészeti Informatika Tanszék BME, D é., 5. e., 412. sz , frt@mogi.bme.hu
2 SZABÁLYOZÁS

3 KONTROLL
4 ENERGIAFAJTÁK, TELJESÍTMÉNYEK Villamos teljesítmény: Mechanikai teljesítmény: Fluid-mechanikai t.: Termikus teljesítmény: Kémiai teljesítmény: (fűtőérték, fogyasztás, hatásfok)

5 ENERGIA FAJTÁK

6 KÉMIAI ENERGIA

7 HELYZETI ENERGIA
8 ÁTALAKÍTÓK Mozgás átalakítók Pl: orsó-anya, fogaskerék-fogasléc, fogaskerék-fogasszíj, zsinórhajtás, forgattyús mechanizmus Energia átalakítók Pl: napelem, napkollektor, gőzgép, gáztűzhely, pneumatikus hajtás, villamos hajtás, belső égésű motor
9 MOZGÁS ÁTALAKÍTÓK (TENGELYKAPCSOLÓK)
10 MOZGÁS ÁTALAKÍTÓK (FORDULATSZÁM ÁTALAKÍTÓK)
11 AKTUÁTOROK OSZTÁLYOZÁSA Elektromágneses (villanymotorok, adattároló) Sugárzási (fény, lézer, CRT, rádióhullám) Hanghullám Termikus (hőtágulási, hőnyomtató) Anyagtulajdonság (folyadékkristály) Kémiai (belsőégésű motorok) Pneumatikus Hidraulikus Piezoelektromos Emlékező fémes Mesterséges izom Magnetostrikciós (ferromágneses anyagok mágneses igénybevétel hatására létrejövő rugalmas alakváltozása)



12 AKTUÁTOROK MEGHATÁROZÁSA Elektromos árammal, olajjal, vagy levegővel működtetett beavatkozó elem, amely képes valamilyen irányító jelnek megfelelő hatás kifejtésére.
13 ROBOT AKTUÁTOROK Helyváltoztatás (pozíció, orientáció) Lépegetés, kerekek, holonomikus hajtás, lánctalpak, légpárna, ugrálás Mozgás Fogás a kezekkel, fej forgása, erőkifejtés, gesztusok Hatáskeltés Lézer, hanghullám, elektromos védelem Jelzések, kommunikáció UI, fényjelek, hangjelek

14


15


16 PNEUMATIKUS AKTUÁTOROK
17 PNEUMATIKUS AKTUÁTOROK
18 PNEUMATIKUS AKTUÁTOROK (ELŐNYÖK) gyors működésű tiszta, nem szennyez (gyógyszer-, élelmiszeriparban is elfogadott), munkavégző elemek felépítése egyszerű, így alacsony a költsége a működtetéshez szükséges sűrített levegő mindenütt előállítható nagy távolságra szállítható, a visszavezetéséről nem kell gondoskodni érzéketlen a hőmérséklet változásokra az erők és a sebesség fokozatmentesen szabályozható lineáris mozgások könnyen megvalósíthatók karbantartást nem igényelnek
19 PNEUMATIKUS AKTUÁTOROK (HÁTRÁNYOK) főként kis tömegekhez alkalmas (7 bar nyomásnál kb N a maximális erő) a levegő összenyomhatósága miatt nem lehet állandó, ill. egyenletes dugattyúsebességet elérni zajos a távozó levegő levegő-előkészítést igényel a sűrített levegő viszonylag drága energiahordozó

20 MESTERSÉGES IZOM



21 HIDRAULIKUS AKTUÁTOROK
22 HIDRAULIKUS AKTUÁTOROK
23 HIDRAULIKUS AKTUÁTOROK (ELŐNYÖK) az olaj összenyomhatatlansága miatt merev rendszer, nagy teherbírás, legmagasabb teljesítmény/saját tömeg arány, kis méreteknél elegendően gyors reagálás, tetszőleges P, I, D stb. jellegű szabályozásra alkalmas, egyenletes mozgás egészen alacsony sebességen (<0.1 mm/s) és nagy teherrel is lehetséges.
24 HIDRAULIKUS AKTUÁTOROK (HÁTRÁNYOK) kiépítés költséges, visszavezető ág kell hidraulika-folyadék számára, szennyezés veszélyes: gyógyszer-, élelmiszeripar kizárja, a hidraulikus tápegység zajos, helyigényes, hűtendő, olajszennyezett, csőtörés esetére biztonsági szelepekre van szükség, csak közepes vagy kis sebességekre alkalmas, a tömítések az elhasználódás miatt gyakori karbantartást igényelnek.


25 HIDRAULIKUS ROBOTKAR

26 VILLAMOS AKTUÁTOROK (ELŐNYÖK) közepes beszerzési ár, gyors és pontos végrehajtásra képes, kis mozgatási sebességekre (0,01 mm/s) is alkalmas a legkifinomultabb mozgásfeladatokra is használható: akár 0,1µm legkisebb beállítható úthossz gyors irányváltás nagy gyorsulások legnagyobb sebességek legmagasabb igényű szabályozási tulajdonságok realizálhatók, a számítógéppel történő szabályozásnak köszönhetően
27 VILLAMOS AKTUÁTOROK (HÁTRÁNYOK) kis nyomaték, nagy fordulatszám miatt gyakran áttétel (1:5, 1:30, de akár 1:1000 is) szükséges, a fogaskerekek kopása és holtjátéka ellen esetlegesen költséges kiviteli kiegészítő válhat szükségessé, áramkimaradás esetére mechanikus fékekre van szükség, a korszerű szinkronmotoros szervohajtások szabályozása bonyolult számítógépes irányítást igényel, a motorok és a teljesítményelektronikai áramkörök túlmelegedés elleni védelme fontos szempont.

28 VILLAMOS MOTOROK FAJTÁI Forgó és lineáris Egyenáramú, váltakozó áramú (szinkron, aszinkron) és léptető Villamos motorok energia közvetítő közege Súrlódó felületek Elektromos tér Elektromágneses tér Piezo motorok v. Ultraszonikus motorok Elektrosztatikus motorok (MEMS) Klasszikus villamos motorok
29 ELEKTROMÁGNESES MOTOROK A forgómozgású motorok egy csőszerű részből és egy hengerszerű részből állnak. A forgó mozgást csapágyazás teszi lehetővé. Az elektromágneses villamos gépek működése két, egymáshoz képest relatív nyugalomban lévő villamos vagy mágneses mező kölcsönhatásán alapul. Az elektromágneses villamos gépek működése reverzibilis, azaz az energiaáramlás iránya megfordítható. Az elektromágneses villamos gépek hatásfoka elméletben tetszőlegesen megközelítheti a 100%-ot.
 forgórész (egy oldalról gerjesztet) mindkettő (két oldalról")

30 GERJESZTŐ MÁGNESES TÉR Gerjesztés helye lehet: állórész (egy oldalról gerjesztet) forgórész (egy oldalról gerjesztet) mindkettő (két oldalról gerjesztet) A gerjesztést megvalósíthatjuk tekercs segítségével állandó mágnes segítségével Elektromágneses forgó motorok alapvető felépítése Axiális fluxusú Radiális fluxusú
31 LÉPTETŐMOTOR Digitálisan vezérelhető elektromágneses aktuátor, legtöbbször forgó mozgás előállítására. Mikor használjunk léptető motort? Ha a mozgássá átalakítandó információ digitális formában áll rendelkezésre, és a kimenetről nincs visszacsatolásunk, tehát nem szabályozási, hanem vezérlési feladatról van szó. Melyek a léptető motor legfontosabb tulajdonságai felhasználási szempontból? A motor szögsebessége csak kivételes esetben állandó, a meghatározott lépésszög miatt a motor forgórésze csak diszkrét helyzetekben állhat meg, a motor álló helyzetben is fogyaszt, ilyenkor a hatásfoka nulla, digitális rendszerekhez könnyen illeszthető.
32 LÉPTETŐMOTOROK MODELLJE A legfontosabb ismérvek: a forgórész fogazott lágyvas, vagy állandó mágnes, árambevezetés a forgórészbe nincs. az állórész az óramotorok kivételével többfázisú tekercseléssel rendelkezik. a szögsebesség általában nem egyenletes, a motor darabol, kis lépésfrekvenciáknál a szögsebesség irányt vált.




33 LÉPTETŐMOTOR
34 LÉPTETŐMOTOR
35 LÉPTETŐMOTOR (ELŐNYÖK) széleskörű alkalmazhatóság kis méret, kis költség egyszerű felépítés nem igényel karbantartást nagy megbízhatóság könnyen és pontosan szabályozható hosszú élettartam nem igényel visszacsatolást, illetve szögelfordulást mérő szenzort
36 LÉPTETŐMOTOR (HÁTRÁNYOK) korlátozott a terhelhetőségük (kisebb nyomatékkal és tehetetlen tömeggel terhelhetők) kis sebességnél durva mozgás léphet fel túlmelegedhet nagyobb sebesség esetén zajos lehet alacsony fordulatszám (maximum fordulat/perc) nem számítógépes környezetben bonyolultabb vezérlés drágább

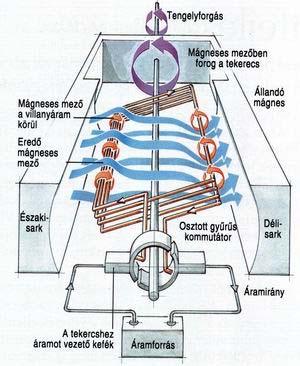
37 EGYENÁRAMÚ (DC) MOTOR Egyenáramú motor elvi felépítése és működése. Ha a tekercsben áram folyik, körülötte mágneses mező létesül, amely igyekszik az állórész mező irányába állni. A forgórész a kommutátorral együtt forog, a kefék az állórészhez rögzítettek, és a kommutátor egymástól elszigetelt lemezein csúsznak. Minden fél fordulatnál a stabil helyzet elérésekor a kommutátor megfordítja a tekercsben folyó áram irányát, így a forgás folytatódik.
38 EGYENÁRAMÚ (DC) MOTOR A hagyományos (kefés) egyenáramú motornál a kefék létesítenek mechanikai kapcsolatot a forgórészen lévő villamos érintkezőkkel (ezt hívják kommutátornak), így elektromos áramkört létrehozva az egyenfeszültségű forrás és az armatúra tekercselése között. Miközben az armatúra forog a tengelye körül, a mozdulatlan kefék kapcsolatba kerülnek a forgó kommutátor különböző részeivel. A kommutátor és kefe rendszer villamos kapcsolók sorozatát alkotják, mindegyik sorrendben kapcsol úgy, hogy az áram mindig az állórészhez (állandómágnes) legközelebb lévő armatúratekercsen folyik keresztül.


39 EGYENÁRAMÚ (DC) MOTOR Az elektromos energia mechanikus energiává való átalakítását Michael Faraday angol tudós mutatta be 1821-ben. Az első villanymotort Jedlik Ányos készítette 1825-ben.

40

41 KOMMUTÁTOR
 MOTOR")
42 EGYENÁRAMÚ (DC) MOTOR


43 BLDC VAGY ECDC MOTOROK (ELEKTRONIKUSAN KOMMUTÁLT MOTOROK) Egy BLDC motorban az elektromágnesek nem mozognak; helyettük az állandómágnesek forognak és az armatúra marad nyugvó. Ezzel megoldódik az a kérdés, hogy miként lehet átvinni az áramot egy mozgó armatúrába. Ebből a célból a kefe-kommutátor rendszert felváltja egy elektronikus vezérlő. A vezérlő hasonlóan osztja el az áramot, mint az egyenáramú kefés motornál történik, de ez egy félvezetős áramkör a kefe-kommutátor rendszer helyett.

44 BLDC VAGY ECDC MOTOROK (ELEKTRONIKUSAN KOMMUTÁLT MOTOROK)
45 BLDC VAGY ECDC MOTOROK (ELEKTRONIKUSAN KOMMUTÁLT MOTOROK) Az egyenáramú motoroknak alapvető jellemzője a mechanikus kommutáció. Egyúttal ez, tehát a kefék, a kommutátor, és különösképpen a kettő kapcsolata a legproblematikusabb része az egyenáramú motoroknak. Leginkább a kefék, de legtöbbször a kommutátor is kopnak, a motor élettartama során elhasználódnak. Mivel a működéshez az áramot a forgásban lévő forgórész tekercseibe kell vezetni, ez csak kisebbnagyobb szikrázások árán lehetséges, amely viszont zavarforrást jelent minden elektronikus készülék számára. Az egyenáramú motorok hátrányos tulajdonságai jórészt a kefekommutátor kapcsolat tökéletlenségeiből következnek. érintkezési bizonytalanság korlátozott élettartam elektromágneses és akusztikus zajok súrlódási veszteségek
46 BLDC VAGY ECDC MOTOROK (ELEKTRONIKUSAN KOMMUTÁLT MOTOROK) Az egyenáramú motoroknak alapvető jellemzője a mechanikus kommutáció. Egyúttal ez, tehát a kefék, a kommutátor, és különösképpen a kettő kapcsolata a legproblematikusabb része az egyenáramú motoroknak. Leginkább a kefék, de legtöbbször a kommutátor is kopnak, a motor élettartama során elhasználódnak. Mivel a működéshez az áramot a forgásban lévő forgórész tekercseibe kell vezetni, ez csak kisebbnagyobb szikrázások árán lehetséges, amely viszont zavarforrást jelent minden elektronikus készülék számára. Az egyenáramú motorok hátrányos tulajdonságai jórészt a kefekommutátor kapcsolat tökéletlenségeiből következnek. érintkezési bizonytalanság korlátozott élettartam elektromágneses és akusztikus zajok súrlódási veszteségek
47 BLDC VAGY ECDC MOTOROK (ELEKTRONIKUSAN KOMMUTÁLT MOTOROK) A mechanikus kommutáló berendezést, tehát a keféket és a kommutátort elektronikus berendezéssel kiváltva megtarthatóak az egyenáramú gépek kedvező tulajdonságai, és ezzel az előbbi hátrányok megszüntethetőek. Hogyan lehet ezt a célt elérni? Mivel a tekercsek kapcsolgatása csak álló rendszerben lehet problémamentes, az elektronikus kommutátorú motorban az állórész és a forgórész szerepe felcserélődik. Ezeknél a motoroknál a forgórész tartalmazza az állandó mágnest (ebbe így nyilvánvalóan nem kell áramot vezetni), a tekercselés pedig áll, ez képezi az állórészt, amelynek tekercseiben folyó áramot azonban kommutálni kell, méghozzá elektronikus eszközökkel, (ezek gyakorlatilag kapcsoló tranzisztorok). Ahhoz, hogy az állórész tekercseit megfelelően kapcsolni tudjuk, a forgórész szöghelyzetét a motornak magának ismernie kell. Ehhez különféle érzékelőket és vezérléseket használnak: Hall generátoros, optoelektronikai, csatolótranszformátoros, indukált feszültséges vezérléseket.

48 REZGETŐ MOTOR A MOBILTELEFONOKBAN egyenáramú motor excentrikus tömeg




49 TÁRCSÁS ÉS HENGERES KONSTRUKCIÓK REZGETŐ TÖMEG TENGELLYEL


50 HELIKOPTER INTEGRÁLT VENTILLÁTOR

51 BLDC VAGY ECDC MOTOROK
52 EGYENÁRAMÚ, LÉPTETŐ, ELEKTRONIKUSAN KOMMUTÁLT MOTOROK ÖSSZEHASONLÍTÁSA DC léptető EC Hatásfok legjobb rossz jó Fajlagos teljesítmény legjobb legrosszabb rosszabb Élettartam rövid hosszú hosszú Vezérelhetőség nagyon jó korlátlan, de lépked rossz Irányváltás pólusváltás fázissorrend fázissorrend Zavarforrás szélessávú meghatározott fr. meghatározott fr. Hajtómű igény van nincs van Szögsebesség folytonosság van nincs van Nyílthurkú szabályozás alkalmatlan alkalmas alkalmatlan


53 VÁLTAKOZÓ ÁRAMÚ (AC) MOTOR Állórészre szinuszos váltóáram kapcsolása Szinkron és aszinkron típus
")
54 VÁLTAKOZÓ ÁRAMÚ (AC) MOTOR



55 ASZINKRON MOTOROK (INDUKCIÓS) Az aszinkron gép más néven indukciós motor a legáltalánosabban használt, legegyszerűbb szerkezetű villamos forgógép, s mint ilyen egy forgó és egy álló részből tevődik össze. A gyakorlatban az egyik legelterjedtebb villamos gép. Kisebb teljesítményre általában egyfázisú, míg nagyobb teljesítmény esetében kizárólag háromfázisú kivitelben készül. Hátránya: fordulatszám változtatás csak külön költséges berendezéssel, vagy kialakítással biztosítható.

56 ASZINKRON MOTOROK (INDUKCIÓS)
57 ASZINKRON MOTOROK (INDUKCIÓS) Az aszinkron gép állórészén általában többfázisú tekercselés található, amely forgó mágneses mezőt hoz létre. A forgó mágneses tér erővonalai metszik a forgórész tekercselését, és abban feszültséget indukálnak. Mivel a tekercselés zárt, vagy rövidre zárt áramkört alkot, az abban indukálódott feszültség hatására a körben áram folyik. Lenz-törvénye értelmében az így indukált áram akadályozni igyekszik az őt létrehozó indukáló folyamatot, ezért a forgórész elfordul, így igyekezvén megakadályozni az erővonalmetszést, és vele az indukciót. Természetesen a forgórész soha nem érheti el az állórész forgó mágneses mezőjének értékét, mivel akkor megszűnne az erővonalmetszés, ezt az elcsúszást nevezik szlipnek.
58 ELEKTROSZTATIKUS MOTOROK Coulomb-törvény Tekercs helyett kondenzátorok a forgórészen



59 LINEÁRIS MOTOROK


60 LINEÁRIS MOTOR


61 LINEÁRIS MOTOR

62 MAGLEV

63 LINEÁRIS AKTUÁTOR
64 EMLÉKEZŐ FÉMES AKTUÁTOROK (SHAPE MEMORY ALLOY, SMA) Az emlékező-fémek (SMA) hőközlés hatására radikálisan megváltoztatják kristályszerkezetüket (martenzitesből ausztenitessé). Az átmeneti hőmérséklet alatti hőmérsékleten rugalmasan jól deformálhatók. Felhevítve az átmeneti hőmérséklet fölé, az ötvözet visszanyeri a deformáció előtti alakját. Előnyük a tömegükhöz képesti nagy munkavégző képességük (nagy erő és elmozdulás). Az ismételt, dinamikus működést a hűlés befolyásolja, ezért minél magasabb az anyag átmeneti hőmérséklete, annál inkább dinamikusabb működés érhető el. Természetesen ez a bevitt teljesítményben és a hatásfokban is jelentkezik. A hevítés gyorsasága nem befolyásolja a kifejtett erőhatást. Általánosan huzal formájában alkalmazzák A hűlést befolyásolja még a felület/térfogat arány is, ezért vékonyabb huzalok gyorsabb működésre képesek.

65 EMLÉKEZŐ FÉMES AKTUÁTOROK (SHAPE MEMORY ALLOY, SMA) Egyutas működés Kétutas működés, az aktuátortechnikában csak ezt használják

66 PIEZO-AKTUÁTOROK
67 PIEZO-AKTUÁTOROK ahol egyéb okok miatt nem lehet ferromágneses anyagokat használni a kristályok belső szerkezeti irányai szerint más-más mértékben nő a hosszuk a működtető feszültségre, térfogatuk gyakorlatilag állandó, azaz keresztirányban a feszültségimpulzus alatt összehúzódnak, tartósan ráadott feszültséggel nem vezérelhetők, erő alatti deformációk nem hanyagolhatók el, tehát túl nagy terhelés alatt nem reagálnak a rákapcsolt feszültségre, mozgatásuk hiszterézissel történik, a visszahúzódás nem a kezdetre történik


68 PIEZO-AKTUÁTOROK
69 PIEZO-AKTUÁTOROK
70 PIEZO-AKTUÁTOROK
71 PIEZO-AKTUÁTOROK

72 PIEZO-AKTUÁTOROK


73 PIEZO-AKTUÁTOROK
Érzékelők és beavatkozók
 Érzékelők és beavatkozók DC motorok 1. rész egyetemi docens - 1 - Főbb típusok: Elektromos motorok Egyenáramú motor DC motor. Kefenélküli egyenáramú motor BLDC motor. Indukciós motor AC motor aszinkron
Érzékelők és beavatkozók DC motorok 1. rész egyetemi docens - 1 - Főbb típusok: Elektromos motorok Egyenáramú motor DC motor. Kefenélküli egyenáramú motor BLDC motor. Indukciós motor AC motor aszinkron
Budapest Műszaki Főiskola Bánki Donát Gépész és Biztonságtechnikai Kar Mechatronikai és Autotechnikai Intézet. Elektrotechnika
 Budapest Műszaki Főiskola Bánki Donát Gépész és Biztonságtechnikai Kar Mechatronikai és Autotechnikai Intézet Elektrotechnika Különleges motorok Összeállította: Lukács Attila PhD hallgató (BME MOGI) és
Budapest Műszaki Főiskola Bánki Donát Gépész és Biztonságtechnikai Kar Mechatronikai és Autotechnikai Intézet Elektrotechnika Különleges motorok Összeállította: Lukács Attila PhD hallgató (BME MOGI) és
Alapfogalmak, osztályozás
 VILLAMOS GÉPEK Alapfogalmak, osztályozás Gépek: szerkezetek, amelyek energia felhasználása árán munkát végeznek, vagy a felhasznált energiát átalakítják más jellegű energiává Működési elv: indukált áram
VILLAMOS GÉPEK Alapfogalmak, osztályozás Gépek: szerkezetek, amelyek energia felhasználása árán munkát végeznek, vagy a felhasznált energiát átalakítják más jellegű energiává Működési elv: indukált áram
Az ábrán a mechatronikát alkotó tudományos területek egymás közötti viszonya látható. A szenzorok és aktuátorok a mechanika és elektrotechnika szoros
 Aktuátorok Az ábrán a mechatronikát alkotó tudományos területek egymás közötti viszonya látható. A szenzorok és aktuátorok a mechanika és elektrotechnika szoros kapcsolatára utalnak. mért nagyság A fizikai
Aktuátorok Az ábrán a mechatronikát alkotó tudományos területek egymás közötti viszonya látható. A szenzorok és aktuátorok a mechanika és elektrotechnika szoros kapcsolatára utalnak. mért nagyság A fizikai
VILLAMOS FORGÓGÉPEK. Forgó mozgás létesítése
 SZÉCHENYI ISTVÁN EGYETEM HTTP://UNI.SZE.HU VILLAMOS FORGÓGÉPEK Forgó mozgás létesítése Marcsa Dániel Villamos gépek és energetika 203/204 - őszi szemeszter Elektromechanikai átalakítás Villamos rendszer
SZÉCHENYI ISTVÁN EGYETEM HTTP://UNI.SZE.HU VILLAMOS FORGÓGÉPEK Forgó mozgás létesítése Marcsa Dániel Villamos gépek és energetika 203/204 - őszi szemeszter Elektromechanikai átalakítás Villamos rendszer
Használható segédeszköz: szabványok, táblázatok, gépkönyvek, számológép
 A 27/2012 (VIII. 27.) NGM rendelet (12/2013 (III.28) NGM rendelet által módosított) szakmai és vizsgakövetelménye alapján. Szakképesítés, azonosító száma és megnevezése 34 522 02 Elektromos gép- és készülékszerelő
A 27/2012 (VIII. 27.) NGM rendelet (12/2013 (III.28) NGM rendelet által módosított) szakmai és vizsgakövetelménye alapján. Szakképesítés, azonosító száma és megnevezése 34 522 02 Elektromos gép- és készülékszerelő
Digitális számítógép. Mechatronikai berendezés általános felépítése Intelligens termékek elemei. Mechatronikai struktúra. Hajtások és vezetékek
 Mechatronikai berendezés általános felépítése Fizikai mennyiségek??????????? Szenzorok?????????????????????? Mért értékek Rendelkező jelek Visszacsatolások Mechatronikai struktúra Mért érték feldolgozás
Mechatronikai berendezés általános felépítése Fizikai mennyiségek??????????? Szenzorok?????????????????????? Mért értékek Rendelkező jelek Visszacsatolások Mechatronikai struktúra Mért érték feldolgozás
Elektrotechnika. Dr. Hodossy László előadás
 Elektrotechnika 13 előadás Dr Hodossy László 2006 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 Szervo Lineáris Lineáris Lineáris Szervo Vezérlő és szabályozó rendszerekben pozícionálási célra alkalmazzák
Elektrotechnika 13 előadás Dr Hodossy László 2006 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 Szervo Lineáris Lineáris Lineáris Szervo Vezérlő és szabályozó rendszerekben pozícionálási célra alkalmazzák
Az elektromágneses indukció jelensége
 Az elektromágneses indukció jelensége Korábban láttuk, hogy az elektromos áram hatására mágneses tér keletkezik (Ampère-féle gerjesztési törvény) Kérdés, hogy vajon ez megfordítható-e, és a mágneses tér
Az elektromágneses indukció jelensége Korábban láttuk, hogy az elektromos áram hatására mágneses tér keletkezik (Ampère-féle gerjesztési törvény) Kérdés, hogy vajon ez megfordítható-e, és a mágneses tér
Útváltók. Fenyvesi D. Dr. Harkay G. OE-BGK
 Útváltók Fenyvesi D. Dr. Harkay G. OE-BGK Irányítóelemek Irányítóelemek A hidraulikus rendszer alapvető irányítási feladatait, a működtetett rendszer igényei határozzák meg, mint pl. Mozgásirány: útváltók.
Útváltók Fenyvesi D. Dr. Harkay G. OE-BGK Irányítóelemek Irányítóelemek A hidraulikus rendszer alapvető irányítási feladatait, a működtetett rendszer igényei határozzák meg, mint pl. Mozgásirány: útváltók.
TARTALOMJEGYZÉK. Előszó 9
 TARTALOMJEGYZÉK 3 Előszó 9 1. Villamos alapfogalmak 11 1.1. A villamosság elő for d u lá s a é s je le n t ősége 12 1.1.1. Történeti áttekintés 12 1.1.2. A vil la mos ság tech ni kai, tár sa dal mi ha
TARTALOMJEGYZÉK 3 Előszó 9 1. Villamos alapfogalmak 11 1.1. A villamosság elő for d u lá s a é s je le n t ősége 12 1.1.1. Történeti áttekintés 12 1.1.2. A vil la mos ság tech ni kai, tár sa dal mi ha
Elektrotechnika. 11. előadás. Összeállította: Dr. Hodossy László
 11. előadás Összeállította: Dr. Hodossy László 1. Szerkezeti felépítés 2. Működés 3. Működés 4. Armatúra reakció 5. Armatúra reakció 6. Egyenáramú gépek osztályozása 7. Külső 8. Külső. 9. Soros. 10. Soros
11. előadás Összeállította: Dr. Hodossy László 1. Szerkezeti felépítés 2. Működés 3. Működés 4. Armatúra reakció 5. Armatúra reakció 6. Egyenáramú gépek osztályozása 7. Külső 8. Külső. 9. Soros. 10. Soros
Egyenáramú gépek. Felépítés
 Egyenármú gépek Felépítés 1. Állórész koszorú 2. Főpólus 3. Segédpólus 4. Forgórész koszorú 5. Armtúr tekercselés 6. Pólus fluxus 7. Kompenzáló tekercselés 1 Állórész - Tömör vstest - Tömör vs pólus -
Egyenármú gépek Felépítés 1. Állórész koszorú 2. Főpólus 3. Segédpólus 4. Forgórész koszorú 5. Armtúr tekercselés 6. Pólus fluxus 7. Kompenzáló tekercselés 1 Állórész - Tömör vstest - Tömör vs pólus -
Intelligens gépek elemei Bevezetés
 Intelligens gépek elemei Bevezetés A gépészet fejlődése, a mechatronika kialakulása Mi jellemezte az 1900 előtti időket? Tisztán mechanikus rendszerek Gőzgép (1769) Dinamók, egyenáramú motor (1870) Forgó
Intelligens gépek elemei Bevezetés A gépészet fejlődése, a mechatronika kialakulása Mi jellemezte az 1900 előtti időket? Tisztán mechanikus rendszerek Gőzgép (1769) Dinamók, egyenáramú motor (1870) Forgó
Hajtástechnika. Villanymotorok. Egyenáramú motorok. Váltóáramú motorok
 Hajtástechnika Villanymotorok Egyenáramú motorok Váltóáramú motorok Soros gerjesztésű Párhuzamos gerjesztésű Külső gerjesztésű Vegyes gerjesztésű Állandó mágneses gerjesztésű Aszinkron motorok Szinkron
Hajtástechnika Villanymotorok Egyenáramú motorok Váltóáramú motorok Soros gerjesztésű Párhuzamos gerjesztésű Külső gerjesztésű Vegyes gerjesztésű Állandó mágneses gerjesztésű Aszinkron motorok Szinkron
Villamos gépek I. Egyfázisú transzformátor 3 1. A vasmag funkciói 3 2. Növekedési törvények 4 3. Felépítés: vasmag kialakítása (lemezelés,
 Villamos gépek I. Egyfázisú transzformátor 3 1. A vasmag funkciói 3 2. Növekedési törvények 4 3. Felépítés: vasmag kialakítása (lemezelés, lépcsőzés), tekercselések (hengeres, tárcsás) 9 4. Fő- és szórt
Villamos gépek I. Egyfázisú transzformátor 3 1. A vasmag funkciói 3 2. Növekedési törvények 4 3. Felépítés: vasmag kialakítása (lemezelés, lépcsőzés), tekercselések (hengeres, tárcsás) 9 4. Fő- és szórt
+ Egyszeres muködésu szögletes henger: +Tömlohenger: (17. ábra) Jellemzok
 Jellemzok") 19 +Tömlohenger: (17. ábra) Jellemzok - kis beépítési méret - elvi lökethossz 80%-a'ha,sználható, külso lökethossz-határoló szükséges - szöget bezáró felilletek,között is használható - ero a lökethossz
19 +Tömlohenger: (17. ábra) Jellemzok - kis beépítési méret - elvi lökethossz 80%-a'ha,sználható, külso lökethossz-határoló szükséges - szöget bezáró felilletek,között is használható - ero a lökethossz
1. Irányítástechnika. Készítette: Fecser Nikolett. 2. Ipari elektronika. Készítette: Horváth Lászó
 A mechatronikai technikus képzés átvilágítására és fejlesztésére irányuló projekt eredményeképp az egyes tantárgyakhoz új, disszeminációra alakalmas tanmeneteket dolgoztunk ki. 1. Irányítástechnika. Készítette:
A mechatronikai technikus képzés átvilágítására és fejlesztésére irányuló projekt eredményeképp az egyes tantárgyakhoz új, disszeminációra alakalmas tanmeneteket dolgoztunk ki. 1. Irányítástechnika. Készítette:
Drágán üzemelnek a régi motorok
 A készülékek többségében ma már nem lehet szabályozatlan aszinkron- motorokat használni. Az új direktíváknak megfelelően frekvenciaváltókat is be kell építeni, vagy más technológiákat kell alkalmazni.
A készülékek többségében ma már nem lehet szabályozatlan aszinkron- motorokat használni. Az új direktíváknak megfelelően frekvenciaváltókat is be kell építeni, vagy más technológiákat kell alkalmazni.
Ipari robotok hajtása
 IPARI ROBOTOK Ipari robotok hajtása 4. előad adás Dr. Pintér r JózsefJ A hajtási rendszerek feladata az, hogy a robot TCP pontját az előírt pontossággal - az irányítórendszer utasításainak megfelelően
IPARI ROBOTOK Ipari robotok hajtása 4. előad adás Dr. Pintér r JózsefJ A hajtási rendszerek feladata az, hogy a robot TCP pontját az előírt pontossággal - az irányítórendszer utasításainak megfelelően
9. évfolyam. Osztályozóvizsga tananyaga FIZIKA
 9. évfolyam Osztályozóvizsga tananyaga A testek mozgása 1. Egyenes vonalú egyenletes mozgás 2. Változó mozgás: gyorsulás fogalma, szabadon eső test mozgása 3. Bolygók mozgása: Kepler törvények A Newtoni
9. évfolyam Osztályozóvizsga tananyaga A testek mozgása 1. Egyenes vonalú egyenletes mozgás 2. Változó mozgás: gyorsulás fogalma, szabadon eső test mozgása 3. Bolygók mozgása: Kepler törvények A Newtoni
KÉTFŐTARTÓS FUTÓDARUK
 KÉPVISELET EMELŐ BERENDEZÉSEK KÉTFŐTARTÓS FUTÓDARUK Elmas kétfõtartós futódaru Demag rendszer Elektromos emelõmûvel és Demag vonszolókábeles áramellátással felszerelve Teherbírás 3,2 t Fesztáv 28,8 m Emelési
KÉPVISELET EMELŐ BERENDEZÉSEK KÉTFŐTARTÓS FUTÓDARUK Elmas kétfõtartós futódaru Demag rendszer Elektromos emelõmûvel és Demag vonszolókábeles áramellátással felszerelve Teherbírás 3,2 t Fesztáv 28,8 m Emelési
E-Laboratórium 2 A léptetőmotorok alkalmazásai Elméleti leírás
 E-Laboratórium 2 A léptetőmotorok alkalmazásai Elméleti leírás 1. Bevezető A szinkronmotorok csoportjában egy külön helyet a léptetőmotor foglal el, aminek a diszkrét működését, vagyis a léptetést, egy
E-Laboratórium 2 A léptetőmotorok alkalmazásai Elméleti leírás 1. Bevezető A szinkronmotorok csoportjában egy külön helyet a léptetőmotor foglal el, aminek a diszkrét működését, vagyis a léptetést, egy
Mágnesesség, elektromágnes, indukció Tudománytörténeti háttér Már i. e. 600 körül Thalész felfedezte, hogy Magnesia város mellett vannak olyan talált
 Mágnesesség, elektromágnes, indukció Tudománytörténeti háttér Már i. e. 600 körül Thalész felfedezte, hogy Magnesia város mellett vannak olyan talált ércek, amelyek vonzzák a vasat. Ezeket mágnesnek nevezték
Mágnesesség, elektromágnes, indukció Tudománytörténeti háttér Már i. e. 600 körül Thalész felfedezte, hogy Magnesia város mellett vannak olyan talált ércek, amelyek vonzzák a vasat. Ezeket mágnesnek nevezték
HAJTÁSTECHNIKA ÉS HAJTÁSOK A hajtásról általában
 HAJTÁSTECHNIKA ÉS HAJTÁSOK A hajtásról általában Gyakori gépészeti feladat az, amikor két különböző gépet kell összekapcsol ni. Ezeknek agépeknek általában igen különböző jelleggörbéjük van, és mégis úgy
HAJTÁSTECHNIKA ÉS HAJTÁSOK A hajtásról általában Gyakori gépészeti feladat az, amikor két különböző gépet kell összekapcsol ni. Ezeknek agépeknek általában igen különböző jelleggörbéjük van, és mégis úgy
Használható segédeszköz: szabványok, táblázatok, gépkönyvek, számológép
 A 27/2012 (VIII. 27.) NGM rendelet (12/2013 (III.28) NGM rendelet által módosított) szakmai és vizsgakövetelménye alapján. Szakképesítés, azonosító száma és megnevezése 34 522 02 Elektromos gép- és készülékszerelő
A 27/2012 (VIII. 27.) NGM rendelet (12/2013 (III.28) NGM rendelet által módosított) szakmai és vizsgakövetelménye alapján. Szakképesítés, azonosító száma és megnevezése 34 522 02 Elektromos gép- és készülékszerelő
SZÉCHENYI ISTVÁN EGYETEM HTTP://UNI.SZE.HU AUTOMATIZÁLÁSI TANSZÉK HTTP://AUTOMATIZALAS.SZE.HU SZINKRON GÉPEK
 SZÉCHENYI ISTVÁN EGYETEM HTTP://UNI.SZE.HU SZINKRON GÉPEK 2013/2014 - őszi szemeszter Szinkron gép Szinkron gép Szinkron gép motor Szinkron gép állandó mágneses motor Szinkron generátor - energiatermelés
SZÉCHENYI ISTVÁN EGYETEM HTTP://UNI.SZE.HU SZINKRON GÉPEK 2013/2014 - őszi szemeszter Szinkron gép Szinkron gép Szinkron gép motor Szinkron gép állandó mágneses motor Szinkron generátor - energiatermelés
4. FEJEZET MOTORHAJTÁSOK
 Tantárgy: TELJESÍTMÉNYELEKTRONIKA Tanár: Dr. Burány Nándor Tanársegéd: Mr. Divéki Szabolcs 5. félév Óraszám: 2+2 1 4. FEJEZET MOTORHAJTÁSOK Széles skála: o W...MW, o precíz pozícionálás...goromba sebességvezérlés.
Tantárgy: TELJESÍTMÉNYELEKTRONIKA Tanár: Dr. Burány Nándor Tanársegéd: Mr. Divéki Szabolcs 5. félév Óraszám: 2+2 1 4. FEJEZET MOTORHAJTÁSOK Széles skála: o W...MW, o precíz pozícionálás...goromba sebességvezérlés.
7. L = 100 mh és r s = 50 Ω tekercset 12 V-os egyenfeszültségű áramkörre kapcsolunk. Mennyi idő alatt éri el az áram az állandósult értékének 63 %-át?
 1. Jelöld H -val, ha hamis, I -vel ha igaz szerinted az állítás!...két elektromos töltés között fellépő erőhatás nagysága arányos a két töltés nagyságával....két elektromos töltés között fellépő erőhatás
1. Jelöld H -val, ha hamis, I -vel ha igaz szerinted az állítás!...két elektromos töltés között fellépő erőhatás nagysága arányos a két töltés nagyságával....két elektromos töltés között fellépő erőhatás
2. Mágneskapcsolók: NC1-es sorozat
 2. Mágneskapcsolók: NC1-es sorozat Alkalmazási terület: A mágneskapcsolót egyen- vagy váltakozó feszültséggel vezérelve kapcsolhatunk max. 6VAC névleges feszültségű és 95A névleges áramú áramkört. A készülék
2. Mágneskapcsolók: NC1-es sorozat Alkalmazási terület: A mágneskapcsolót egyen- vagy váltakozó feszültséggel vezérelve kapcsolhatunk max. 6VAC névleges feszültségű és 95A névleges áramú áramkört. A készülék
Gyártástechnológia alapjai
 Gyártástechnológia alapjai BAGGA11MNC SZERSZÁMGÉPEK 3. Előadás Óbudai Egyetem, BGK AGI-GGY Forgómozgású főhajtóművek csoportosítása Forgómozgást létesítő hajtóművek 2 Főhajtás variációk Fokozatos típusok
Gyártástechnológia alapjai BAGGA11MNC SZERSZÁMGÉPEK 3. Előadás Óbudai Egyetem, BGK AGI-GGY Forgómozgású főhajtóművek csoportosítása Forgómozgást létesítő hajtóművek 2 Főhajtás variációk Fokozatos típusok
TENGELYKAPCSOLÓK (Vázlat)
") TENGELYKAPCSOLÓK (Vázlat) Tengelykapcsolók Feladat: két tengely összekapcsolása a kapcsolat megszakítása a tengelyek és más nyomaték átvivő elemek (tárcsák, karok, fogaskerekek stb.) összekötése forgás,
TENGELYKAPCSOLÓK (Vázlat) Tengelykapcsolók Feladat: két tengely összekapcsolása a kapcsolat megszakítása a tengelyek és más nyomaték átvivő elemek (tárcsák, karok, fogaskerekek stb.) összekötése forgás,
Az elektromágneses tér energiája
 Az elektromágneses tér energiája Az elektromos tér energiasűrűsége korábbról: Hasonlóképpen, a mágneses tér energiája: A tér egy adott pontjában az elektromos és mágneses terek együttes energiasűrűsége
Az elektromágneses tér energiája Az elektromos tér energiasűrűsége korábbról: Hasonlóképpen, a mágneses tér energiája: A tér egy adott pontjában az elektromos és mágneses terek együttes energiasűrűsége
ÉRZÉKELŐK ÉS BEAVATKOZÓK II. 2. DC MOTOROK BEVEZETÉS ÉS STATIKUS MODELLEZÉS
 ÉRZÉKELŐK ÉS EVTKOZÓK II. 2. DC MOTOROK EVEZETÉS ÉS STTIKUS MODELLEZÉS Dr. Soumelidis lexandros 2019.02.13. ME KÖZLEKEDÉSMÉRNÖKI ÉS JÁRMŰMÉRNÖKI KR 32708-2/2017/INTFIN SZÁMÚ EMMI ÁLTL TÁMOGTOTT TNNYG Elektromos
ÉRZÉKELŐK ÉS EVTKOZÓK II. 2. DC MOTOROK EVEZETÉS ÉS STTIKUS MODELLEZÉS Dr. Soumelidis lexandros 2019.02.13. ME KÖZLEKEDÉSMÉRNÖKI ÉS JÁRMŰMÉRNÖKI KR 32708-2/2017/INTFIN SZÁMÚ EMMI ÁLTL TÁMOGTOTT TNNYG Elektromos
ÉPÜLETGÉPÉSZETI ELEKTROMOS ÉS SZABÁLYOZÓ RENDSZEREK
 6203-11 modul ÉPÜLETGÉPÉSZETI ELEKTROMOS ÉS SZABÁLYOZÓ RENDSZEREK I. rész ÉPÜLETGÉPÉSZETI ELEKTROMOS SZERELÉSEK II. RÉSZ VEZÉRLÉS ÉS SZABÁLYOZÁSTECHNIKA TARTALOMJEGYZÉKE Szerkesztette: I. Rész: Tolnai
6203-11 modul ÉPÜLETGÉPÉSZETI ELEKTROMOS ÉS SZABÁLYOZÓ RENDSZEREK I. rész ÉPÜLETGÉPÉSZETI ELEKTROMOS SZERELÉSEK II. RÉSZ VEZÉRLÉS ÉS SZABÁLYOZÁSTECHNIKA TARTALOMJEGYZÉKE Szerkesztette: I. Rész: Tolnai
Gépészmérnöki alapszak, Mérnöki fizika 2. ZH, december 05. Feladatok (maximum 3x6 pont=18 pont)
") 1. 2. 3. Mondat E1 E2 NÉV: Gépészmérnöki alapszak, Mérnöki fizika 2. ZH, 2017. december 05. Neptun kód: Aláírás: g=10 m/s 2 ; ε 0 = 8.85 10 12 F/m; μ 0 = 4π 10 7 Vs/Am; c = 3 10 8 m/s Előadó: Márkus /
1. 2. 3. Mondat E1 E2 NÉV: Gépészmérnöki alapszak, Mérnöki fizika 2. ZH, 2017. december 05. Neptun kód: Aláírás: g=10 m/s 2 ; ε 0 = 8.85 10 12 F/m; μ 0 = 4π 10 7 Vs/Am; c = 3 10 8 m/s Előadó: Márkus /
GÉPSZERKEZETTAN - TERVEZÉS GÉPELEMEK KÁROSODÁSA
 GÉPSZERKEZETTAN - TERVEZÉS GÉPELEMEK KÁROSODÁSA 1 Üzemképesség Működésre, a funkció betöltésére való alkalmasság. Az adott gépelem maradéktalanul megfelel azoknak a követelményeknek, amelyek teljesítésére
GÉPSZERKEZETTAN - TERVEZÉS GÉPELEMEK KÁROSODÁSA 1 Üzemképesség Működésre, a funkció betöltésére való alkalmasság. Az adott gépelem maradéktalanul megfelel azoknak a követelményeknek, amelyek teljesítésére
S Z I N K R O N G É P E K
 VILLANYSZERELŐ KÉPZÉS 2 0 1 5 S Z I N K R O N G É P E K ÖSSZEÁLLÍTOTTA NAGY LÁSZLÓ MÉRNÖKTANÁR - 2 - Tartalomjegyzék Szinkrongépek működési elve...3 Szinkrongépek felépítése...3 Szinkrongenerátor üresjárási
VILLANYSZERELŐ KÉPZÉS 2 0 1 5 S Z I N K R O N G É P E K ÖSSZEÁLLÍTOTTA NAGY LÁSZLÓ MÉRNÖKTANÁR - 2 - Tartalomjegyzék Szinkrongépek működési elve...3 Szinkrongépek felépítése...3 Szinkrongenerátor üresjárási
4. /ÁK Adja meg a villamos áramkör passzív építő elemeit!
 Áramkörök 1. /ÁK Adja meg a mértékegységek lehetséges prefixumait (20db)! 2. /ÁK Értelmezze az ideális feszültség generátor fogalmát! 3. /ÁK Mit ért valóságos feszültség generátor alatt? 4. /ÁK Adja meg
Áramkörök 1. /ÁK Adja meg a mértékegységek lehetséges prefixumait (20db)! 2. /ÁK Értelmezze az ideális feszültség generátor fogalmát! 3. /ÁK Mit ért valóságos feszültség generátor alatt? 4. /ÁK Adja meg
Programozható irányító berendezések és szenzorrendszerek. Az ipari irányítástechnika gyakorlati eszközei Végrehajtók, beavatkozók
 Programozható irányító berendezések és szenzorrendszerek Szabályozási kör hatásvázlata Az ipari irányítástechnika gyakorlati eszközei Végrehajtók, beavatkozók X a : alapjel X v : végrehajtójel X m : módosított
Programozható irányító berendezések és szenzorrendszerek Szabályozási kör hatásvázlata Az ipari irányítástechnika gyakorlati eszközei Végrehajtók, beavatkozók X a : alapjel X v : végrehajtójel X m : módosított
Használható segédeszköz: szabványok, táblázatok, gépkönyvek, számológép
 A 27/2012 (VIII. 27.) NGM rendelet (12/2013 (III.28) NGM rendelet által módosított) szakmai és vizsgakövetelménye alapján. Szakképesítés, azonosító száma és megnevezése 34 522 02 Elektromos gép- és készülékszerelő
A 27/2012 (VIII. 27.) NGM rendelet (12/2013 (III.28) NGM rendelet által módosított) szakmai és vizsgakövetelménye alapján. Szakképesítés, azonosító száma és megnevezése 34 522 02 Elektromos gép- és készülékszerelő
Aktuátorok korszerű anyagai. Készítette: Tomozi György
 Aktuátorok korszerű anyagai Készítette: Tomozi György Technológiai fejlődés iránya Mikro nanotechnológia egyre kisebb aktuátorok egyre gyorsabb aktuátorok nem feltétlenül villamos, hanem egyéb csatolás
Aktuátorok korszerű anyagai Készítette: Tomozi György Technológiai fejlődés iránya Mikro nanotechnológia egyre kisebb aktuátorok egyre gyorsabb aktuátorok nem feltétlenül villamos, hanem egyéb csatolás
Elektromechanika. 4. mérés. Háromfázisú aszinkron motor vizsgálata. 1. Rajzolja fel és értelmezze az aszinkron gép helyettesítő kapcsolási vázlatát.
 Elektromechanika 4. mérés Háromfázisú aszinkron motor vizsgálata 1. Rajzolja fel és értelmezze az aszinkron gép helyettesítő kapcsolási vázlatát. U 1 az állórész fázisfeszültségének vektora; I 1 az állórész
Elektromechanika 4. mérés Háromfázisú aszinkron motor vizsgálata 1. Rajzolja fel és értelmezze az aszinkron gép helyettesítő kapcsolási vázlatát. U 1 az állórész fázisfeszültségének vektora; I 1 az állórész
Foglalkozási napló a 20 /20. tanévre
 Foglalkozási napló a 20 /20. tanévre Villanyszerelő szakma gyakorlati oktatásához OKJ száma: 34 522 04 A napló vezetéséért felelős: A napló megnyitásának dátuma: A napló lezárásának dátuma: Tanulók adatai
Foglalkozási napló a 20 /20. tanévre Villanyszerelő szakma gyakorlati oktatásához OKJ száma: 34 522 04 A napló vezetéséért felelős: A napló megnyitásának dátuma: A napló lezárásának dátuma: Tanulók adatai
Újpesti Bródy Imre Gimnázium és Ál tal án os Isk ola
 Újpesti Bródy Imre Gimnázium és Ál tal án os Isk ola 1047 Budapest, Langlet Valdemár utca 3-5. www.brody-bp.sulinet.hu e-mail: titkar@big.sulinet.hu Telefon: (1) 369 4917 OM: 034866 Osztályozóvizsga részletes
Újpesti Bródy Imre Gimnázium és Ál tal án os Isk ola 1047 Budapest, Langlet Valdemár utca 3-5. www.brody-bp.sulinet.hu e-mail: titkar@big.sulinet.hu Telefon: (1) 369 4917 OM: 034866 Osztályozóvizsga részletes
Tételek Elektrotechnika és elektronika I tantárgy szóbeli részéhez 1 1. AZ ELEKTROSZTATIKA ALAPJAI AZ ELEKTROMOS TÖLTÉS FOGALMA 8 1.
 Tételek Elektrotechnika és elektronika I tantárgy szóbeli részéhez 1 1. AZ ELEKTROSZTATIKA ALAPJAI 8 1.1 AZ ELEKTROMOS TÖLTÉS FOGALMA 8 1.2 AZ ELEKTROMOS TÉR 9 1.3 COULOMB TÖRVÉNYE 10 1.4 AZ ELEKTROMOS
Tételek Elektrotechnika és elektronika I tantárgy szóbeli részéhez 1 1. AZ ELEKTROSZTATIKA ALAPJAI 8 1.1 AZ ELEKTROMOS TÖLTÉS FOGALMA 8 1.2 AZ ELEKTROMOS TÉR 9 1.3 COULOMB TÖRVÉNYE 10 1.4 AZ ELEKTROMOS
Transzformátor rezgés mérés. A BME Villamos Energetika Tanszéken
 Transzformátor rezgés mérés A BME Villamos Energetika Tanszéken A valóság egyszerűsítése, modellezés. A mérés tervszerűen végrehajtott tevékenység, ezért a bonyolult valóságos rendszert először egyszerűsítik.
Transzformátor rezgés mérés A BME Villamos Energetika Tanszéken A valóság egyszerűsítése, modellezés. A mérés tervszerűen végrehajtott tevékenység, ezért a bonyolult valóságos rendszert először egyszerűsítik.
Elektrotechnika 11/C Villamos áramkör Passzív és aktív hálózatok
 Elektrotechnika 11/C Villamos áramkör A villamos áramkör. A villamos áramkör részei. Ideális feszültségforrás. Fogyasztó. Vezeték. Villamos ellenállás. Ohm törvénye. Részfeszültségek és feszültségesés.
Elektrotechnika 11/C Villamos áramkör A villamos áramkör. A villamos áramkör részei. Ideális feszültségforrás. Fogyasztó. Vezeték. Villamos ellenállás. Ohm törvénye. Részfeszültségek és feszültségesés.
Vegyipari géptan 2. Hidrodinamikai Rendszerek Tanszék. 1111, Budapest, Műegyetem rkp. 3. D ép. 3. em Tel: 463 16 80 Fax: 463 30 91 www.hds.bme.
 Vegyiari gétan 2. Hidrodinamikai Rendszerek Tanszék 1111, Budaest, Műegyetem rk. 3. D é. 3. em Tel: 463 16 80 Fax: 463 30 91 www.hds.bme.hu Csoortosítás 2. Működési elv alaján Centrifugálgéek (örvénygéek)
Vegyiari gétan 2. Hidrodinamikai Rendszerek Tanszék 1111, Budaest, Műegyetem rk. 3. D é. 3. em Tel: 463 16 80 Fax: 463 30 91 www.hds.bme.hu Csoortosítás 2. Működési elv alaján Centrifugálgéek (örvénygéek)
(Az 1. példa adatai Uray-Szabó: Elektrotechnika c. (Nemzeti Tankönyvkiadó) könyvéből vannak.)
 könyvéből vannak.)") Egyenáramú gépek (Az 1. példa adatai Uray-Szabó: Elektrotechnika c. (Nemzeti Tankönyvkiadó) könyvéből vannak.) 1. Párhuzamos gerjesztésű egyenáramú motor 500 V kapocsfeszültségű, párhuzamos gerjesztésű
Egyenáramú gépek (Az 1. példa adatai Uray-Szabó: Elektrotechnika c. (Nemzeti Tankönyvkiadó) könyvéből vannak.) 1. Párhuzamos gerjesztésű egyenáramú motor 500 V kapocsfeszültségű, párhuzamos gerjesztésű
1 kérdés. Személyes kezdőlap Villamos Gelencsér Géza Simonyi teszt május 13. szombat Teszt feladatok 2017 Előzetes megtekintés
 Személyes kezdőlap Villamos Gelencsér Géza Simonyi teszt 2017. május 13. szombat Teszt feladatok 2017 Előzetes megtekintés Kezdés ideje 2017. május 9., kedd, 16:54 Állapot Befejezte Befejezés dátuma 2017.
Személyes kezdőlap Villamos Gelencsér Géza Simonyi teszt 2017. május 13. szombat Teszt feladatok 2017 Előzetes megtekintés Kezdés ideje 2017. május 9., kedd, 16:54 Állapot Befejezte Befejezés dátuma 2017.
Szakképesítés: 54 523 01 Automatikai technikus Szóbeli vizsgatevékenység A vizsgafeladat megnevezése: Irányítástechnikai alapok, gyártórendszerek
 A vizsgafeladat ismertetése: A szóbeli vizsgatevékenység központilag összeállított vizsgakérdései a IV. Szakmai követelmények fejezetben megadott 10003-12 Irányítástechnikai alapok és a 10002-12 Ipari
A vizsgafeladat ismertetése: A szóbeli vizsgatevékenység központilag összeállított vizsgakérdései a IV. Szakmai követelmények fejezetben megadott 10003-12 Irányítástechnikai alapok és a 10002-12 Ipari
A 27/2012 (VIII. 27.) NGM rendelet 29/2016 (VIII.26) NGM rendelet által módosított) szakmai és vizsgakövetelménye alapján.
 NGM rendelet 29/2016 (VIII.26) NGM rendelet által módosított) szakmai és vizsgakövetelménye alapján.") A 27/2012 (VIII. 27.) NGM rendelet 29/2016 (VIII.26) NGM rendelet által módosított) szakmai és vizsgakövetelménye alapján. Szakképesítés, azonosító száma és megnevezése 54 522 01 Erősáramú elektrotechnikus
A 27/2012 (VIII. 27.) NGM rendelet 29/2016 (VIII.26) NGM rendelet által módosított) szakmai és vizsgakövetelménye alapján. Szakképesítés, azonosító száma és megnevezése 54 522 01 Erősáramú elektrotechnikus
4. /ÁK Adja meg a villamos áramkör passzív építő elemeit!
 Áramkörök 1. /ÁK Adja meg a mértékegységek lehetséges prefixumait (20db)! 2. /ÁK Értelmezze az ideális feszültség generátor fogalmát! 3. /ÁK Mit ért valóságos feszültség generátor alatt? 4. /ÁK Adja meg
Áramkörök 1. /ÁK Adja meg a mértékegységek lehetséges prefixumait (20db)! 2. /ÁK Értelmezze az ideális feszültség generátor fogalmát! 3. /ÁK Mit ért valóságos feszültség generátor alatt? 4. /ÁK Adja meg
Orvosi jelfeldolgozás. Információ. Információtartalom. Jelek osztályozása De, mi az a jel?
 Orvosi jelfeldolgozás Információ De, mi az a jel? Jel: Információt szolgáltat (információ: új ismeretanyag, amely csökkenti a bizonytalanságot).. Megjelent.. Panasza? információ:. Egy beteg.. Fáj a fogam.
Orvosi jelfeldolgozás Információ De, mi az a jel? Jel: Információt szolgáltat (információ: új ismeretanyag, amely csökkenti a bizonytalanságot).. Megjelent.. Panasza? információ:. Egy beteg.. Fáj a fogam.
DC motor= egyenáramú motor, villanymotor vezérlése micro:bittel:
 + DC motor= egyenáramú motor, villanymotor vezérlése micro:bittel: A motor egyfajta eszköz, amely az elektromágneses indukció szerint a villamos energiát kinetikus energiává alakíthatja át. Sokféle motor
+ DC motor= egyenáramú motor, villanymotor vezérlése micro:bittel: A motor egyfajta eszköz, amely az elektromágneses indukció szerint a villamos energiát kinetikus energiává alakíthatja át. Sokféle motor
4. Mérés Szinkron Generátor
 4. Mérés Szinkron Generátor Elsődleges üzemállaot szerint beszélhetünk szinkron generátorról és szinkron motorról, attól függően, hogy a szinkron gé elsődlegesen generátoros vagy motoros üzemállaotban
4. Mérés Szinkron Generátor Elsődleges üzemállaot szerint beszélhetünk szinkron generátorról és szinkron motorról, attól függően, hogy a szinkron gé elsődlegesen generátoros vagy motoros üzemállaotban
Mérés és adatgyűjtés
 Mérés és adatgyűjtés 7. óra Mingesz Róbert Szegedi Tudományegyetem 2013. április 11. MA - 7. óra Verzió: 2.2 Utolsó frissítés: 2013. április 10. 1/37 Tartalom I 1 Szenzorok 2 Hőmérséklet mérése 3 Fény
Mérés és adatgyűjtés 7. óra Mingesz Róbert Szegedi Tudományegyetem 2013. április 11. MA - 7. óra Verzió: 2.2 Utolsó frissítés: 2013. április 10. 1/37 Tartalom I 1 Szenzorok 2 Hőmérséklet mérése 3 Fény
Mechatronika, Optika és Gépészeti Informatika Tanszék MOTOR - BOARD
 echatronika, Optika és Gépészeti Informatika Tanszék OTOR - BORD I. Elméleti alapok a felkészüléshez 1. vizsgált berendezés mérést a HPS System Technik (www.hps-systemtechnik.com) rendszereszközök segítségével
echatronika, Optika és Gépészeti Informatika Tanszék OTOR - BORD I. Elméleti alapok a felkészüléshez 1. vizsgált berendezés mérést a HPS System Technik (www.hps-systemtechnik.com) rendszereszközök segítségével
ÜZLETKÖTŐI ÉRTEKEZLET 2012-01-13 DUNAKESZI
 ÜZLETKÖTŐI ÉRTEKEZLET 2012-01-13 DUNAKESZI ÉS MOTORVÉDŐ KAPCSOLÓK KONTAKTOROK Kontaktor definíció: Olyan gyakori működésre alkalmas elektromágneses elven működtetett mechanikus kapcsolókészülék,
ÜZLETKÖTŐI ÉRTEKEZLET 2012-01-13 DUNAKESZI ÉS MOTORVÉDŐ KAPCSOLÓK KONTAKTOROK Kontaktor definíció: Olyan gyakori működésre alkalmas elektromágneses elven működtetett mechanikus kapcsolókészülék,
AIRPOL PRM frekvenciaváltós csavarkompresszorok. Airpol PRM frekvenciaváltós csavarkompresszorok
 Airpol PRM frekvenciaváltós csavarkompresszorok Az Airpol PRM frekvenciaváltós csavarkompresszorok változtatható sebességű meghajtással rendelkeznek 50-100%-ig. Ha a sűrített levegő fogyasztás kevesebb,
Airpol PRM frekvenciaváltós csavarkompresszorok Az Airpol PRM frekvenciaváltós csavarkompresszorok változtatható sebességű meghajtással rendelkeznek 50-100%-ig. Ha a sűrített levegő fogyasztás kevesebb,
Háromfázisú aszinkron motorok
 Háromfázisú aszinkron motorok 1. példa Egy háromfázisú, 20 kw teljesítményű, 6 pólusú, 400 V/50 Hz hálózatról üzemeltetett aszinkron motor fordulatszáma 950 1/min. Teljesítmény tényezője 0,88, az állórész
Háromfázisú aszinkron motorok 1. példa Egy háromfázisú, 20 kw teljesítményű, 6 pólusú, 400 V/50 Hz hálózatról üzemeltetett aszinkron motor fordulatszáma 950 1/min. Teljesítmény tényezője 0,88, az állórész
Mérésadatgyűjtés, jelfeldolgozás.
 Mérésadatgyűjtés, jelfeldolgozás. Nem villamos jelek mérésének folyamatai. Érzékelők, jelátalakítók felosztása. Passzív jelátalakítók. 1.Ellenállás változáson alapuló jelátalakítók -nyúlásmérő ellenállások
Mérésadatgyűjtés, jelfeldolgozás. Nem villamos jelek mérésének folyamatai. Érzékelők, jelátalakítók felosztása. Passzív jelátalakítók. 1.Ellenállás változáson alapuló jelátalakítók -nyúlásmérő ellenállások
EGYENÁRAMÚ GÉP VIZSGÁLATA Laboratóriumi mérési útmutató
 BUDAPESTI MÛSZAKI ÉS GAZDASÁGTUDOMÁNYI EGYETEM VILLAMOSMÉRNÖKI ÉS INFORMATIKAI KAR VILLAMOS ENERGETIKA TANSZÉK Villamos gépek és hajtások csoport EGYENÁRAMÚ GÉP VIZSGÁLATA Laboratóriumi mérési útmutató
BUDAPESTI MÛSZAKI ÉS GAZDASÁGTUDOMÁNYI EGYETEM VILLAMOSMÉRNÖKI ÉS INFORMATIKAI KAR VILLAMOS ENERGETIKA TANSZÉK Villamos gépek és hajtások csoport EGYENÁRAMÚ GÉP VIZSGÁLATA Laboratóriumi mérési útmutató
Az aszinkron és a szinkron gépek külső mágnesének vasmagja, -amelyik általában az
 8 FORGÓMEZŐS GÉPEK. Az aszinkron és a szinkron géek külső mágnesének vasmagja, -amelyik általában az állórész,- hengergyűrű alakú. A D átmérőjű belső felületén tengelyirányban hornyokat mélyítenek, és
8 FORGÓMEZŐS GÉPEK. Az aszinkron és a szinkron géek külső mágnesének vasmagja, -amelyik általában az állórész,- hengergyűrű alakú. A D átmérőjű belső felületén tengelyirányban hornyokat mélyítenek, és
Élelmiszeripari folyamatirányítás
 Élelmiszeripari folyamatirányítás 2017.02.25. Vezérlés Zavaró jelek Érzékelő M/Á Vezérlő berendezés Beavatkozó Vezérelt folyamat Szabályozás Zavaró jelek Alapjeladó Szabályozó Beavatkozó Szabályozott berendezés
Élelmiszeripari folyamatirányítás 2017.02.25. Vezérlés Zavaró jelek Érzékelő M/Á Vezérlő berendezés Beavatkozó Vezérelt folyamat Szabályozás Zavaró jelek Alapjeladó Szabályozó Beavatkozó Szabályozott berendezés
Jegyzetelési segédlet 8.
 Jegyzetelési segédlet 8. Informatikai rendszerelemek tárgyhoz 2009 Szerkesztett változat Géczy László Billentyűzet, billentyűk szabványos elrendezése funkció billentyűk ISO nemzetközi írógép alap billentyűk
Jegyzetelési segédlet 8. Informatikai rendszerelemek tárgyhoz 2009 Szerkesztett változat Géczy László Billentyűzet, billentyűk szabványos elrendezése funkció billentyűk ISO nemzetközi írógép alap billentyűk
Energiahatékony erőcsomagok Magas teljesítményű préslégmotorok a magas forgatónyomaték eléréséhez, a legalacsonyabb levegő felhasználással
 Energiahatékony erőcsomagok Magas teljesítményű préslégmotorok a magas forgatónyomaték eléréséhez, a legalacsonyabb levegő felhasználással Masszív motorok extrém környezeti feltételekhez, a teljes leállásig
Energiahatékony erőcsomagok Magas teljesítményű préslégmotorok a magas forgatónyomaték eléréséhez, a legalacsonyabb levegő felhasználással Masszív motorok extrém környezeti feltételekhez, a teljes leállásig
Gépelemek-géptan, Osztályozó vizsga témakörök, az Autószerelő évi kerettanterve alapján. 10. évfolyam
 Gépelemek-géptan, Osztályozó vizsga témakörök, az Autószerelő 2018. évi kerettanterve alapján 10. évfolyam Számonkérés: feladatlap megoldása, szóbeli tétel húzása Szükséges eszközök: toll Bevezetés, kötőgépelemek,
Gépelemek-géptan, Osztályozó vizsga témakörök, az Autószerelő 2018. évi kerettanterve alapján 10. évfolyam Számonkérés: feladatlap megoldása, szóbeli tétel húzása Szükséges eszközök: toll Bevezetés, kötőgépelemek,
Elektrotechnika. Ballagi Áron
 Elektrotechnika Ballagi Áron Mágneses tér Elektrotechnika x/2 Mágneses indukció kísérlet Állandó mágneses térben helyezzünk el egy l hosszúságú vezetőt, és bocsássunk a vezetőbe I áramot! Tapasztalat:
Elektrotechnika Ballagi Áron Mágneses tér Elektrotechnika x/2 Mágneses indukció kísérlet Állandó mágneses térben helyezzünk el egy l hosszúságú vezetőt, és bocsássunk a vezetőbe I áramot! Tapasztalat:
A kísérlet, mérés megnevezése célkitűzései: Váltakozó áramú körök vizsgálata, induktív ellenállás mérése, induktivitás értelmezése.
 A kísérlet, mérés megnevezése célkitűzései: Váltakozó áramú körök vizsgálata, induktív ellenállás mérése, induktivitás értelmezése. Eszközszükséglet: tanulói tápegység funkcionál generátor tekercsek digitális
A kísérlet, mérés megnevezése célkitűzései: Váltakozó áramú körök vizsgálata, induktív ellenállás mérése, induktivitás értelmezése. Eszközszükséglet: tanulói tápegység funkcionál generátor tekercsek digitális
Mágneses erőtér. Ahol az áramtól átjárt vezetőre (vagy mágnestűre) erő hat. A villamos forgógépek mutatós műszerek működésének alapja
 erő hat. A villamos forgógépek mutatós műszerek működésének alapja") Mágneses erőtér Ahol az áramtól átjárt vezetőre (vagy mágnestűre) erő hat A villamos forgógépek mutatós műszerek működésének alapja Magnetosztatikai mező: nyugvó állandó mágnesek és egyenáramok időben
Mágneses erőtér Ahol az áramtól átjárt vezetőre (vagy mágnestűre) erő hat A villamos forgógépek mutatós műszerek működésének alapja Magnetosztatikai mező: nyugvó állandó mágnesek és egyenáramok időben
ELEKTROTECHNIKA-ELEKTRONIKA ELEKTROTECHNIKA
 ELEKTROTECHNIKA-ELEKTRONIKA ELEKTROTECHNIKA 1. Egyenáramú körök Követelmények, matematikai alapok, prefixumok Töltés, áramerősség Feszültség Ellenállás és vezetés. Vezetők, szigetelők Áramkör fogalma Áramköri
ELEKTROTECHNIKA-ELEKTRONIKA ELEKTROTECHNIKA 1. Egyenáramú körök Követelmények, matematikai alapok, prefixumok Töltés, áramerősség Feszültség Ellenállás és vezetés. Vezetők, szigetelők Áramkör fogalma Áramköri
FIZIKA II. Az áram és a mágneses tér kapcsolata
 Az áram és a mágneses tér kapcsolata Mágneses tér jellemzése: Mágneses térerősség: H (A/m) Mágneses indukció: B (T = Vs/m 2 ) B = μ 0 μ r H 2Seres.Istvan@gek.szie.hu Sztatikus terek Elektrosztatikus tér:
Az áram és a mágneses tér kapcsolata Mágneses tér jellemzése: Mágneses térerősség: H (A/m) Mágneses indukció: B (T = Vs/m 2 ) B = μ 0 μ r H 2Seres.Istvan@gek.szie.hu Sztatikus terek Elektrosztatikus tér:
VI. fejezet. Az alapvető elektromechanikai átalakítók működési elvei
 VI. fejezet Az alapvető elektromechanikai átalakítók működési elvei Aszinkron gépek Gépfajták származtatása #: ω r =var Az ún. indukciós gépek forgórészében indukált feszültségek által létrehozott rotoráramok
VI. fejezet Az alapvető elektromechanikai átalakítók működési elvei Aszinkron gépek Gépfajták származtatása #: ω r =var Az ún. indukciós gépek forgórészében indukált feszültségek által létrehozott rotoráramok
Érzékelők és beavatkozók
 Érzékelők és beavatkozók Léptetőmotorok egyetemi docens - 1 - Léptetőmotorok A léptetőmotorok alapvető tulajdonságai: A forgórész diszkrét szöghelyzetekbe állítható be. Az adott szögpozícióban tartó nyomatékot
Érzékelők és beavatkozók Léptetőmotorok egyetemi docens - 1 - Léptetőmotorok A léptetőmotorok alapvető tulajdonságai: A forgórész diszkrét szöghelyzetekbe állítható be. Az adott szögpozícióban tartó nyomatékot
MÁGNESES INDUKCIÓ VÁLTÓÁRAM VÁLTÓÁRAMÚ HÁLÓZATOK
 MÁGNESES NDUKCÓ VÁLTÓÁRAM VÁLTÓÁRAMÚ HÁLÓZATOK Mágneses indukció Mozgási indukció v B Vezetőt elmozdítunk mágneses térben B-re merőlegesen, akkor a vezetőben áram keletkezik, melynek iránya az őt létrehozó
MÁGNESES NDUKCÓ VÁLTÓÁRAM VÁLTÓÁRAMÚ HÁLÓZATOK Mágneses indukció Mozgási indukció v B Vezetőt elmozdítunk mágneses térben B-re merőlegesen, akkor a vezetőben áram keletkezik, melynek iránya az őt létrehozó
Teherbírás. Magasság. (mm) (kg) 1.500 3.000 5.000 10.000 1.500 3.000 5.000 10.000. felár
 (kg) 1.500 3.000 5.000 10.000 1.500 3.000 5.000 10.000. felár") VS és KB fogasléces emelõk, hébér DIN 7355 szerint. Alacsony szerkezeti a KB típus esetében. Biztonsági hajtókar behajtható fogantyúval. Kívánságra racsnis hajtókarral is szállítható. 10/ Köröm (legalacsonyabb)
VS és KB fogasléces emelõk, hébér DIN 7355 szerint. Alacsony szerkezeti a KB típus esetében. Biztonsági hajtókar behajtható fogantyúval. Kívánságra racsnis hajtókarral is szállítható. 10/ Köröm (legalacsonyabb)
IPARI ROBOTOK. Kinematikai strukturák, munkatértípusok. 2. előadás. Dr. Pintér József
 IPARI ROBOTOK, munkatértípusok 2. előadás Dr. Pintér József Az ipari robotok kinematikai felépítése igen sokféle lehet. A kinematikai felépítés alapvetően meghatározza munkaterének alakját, a mozgási sebességét,
IPARI ROBOTOK, munkatértípusok 2. előadás Dr. Pintér József Az ipari robotok kinematikai felépítése igen sokféle lehet. A kinematikai felépítés alapvetően meghatározza munkaterének alakját, a mozgási sebességét,
2.) Fajlagos ellenállásuk nagysága alapján állítsd sorrendbe a következő fémeket! Kezd a legjobban vezető fémmel!
 Fajlagos ellenállásuk nagysága alapján állítsd sorrendbe a következő fémeket! Kezd a legjobban vezető fémmel!") 1.) Hány Coulomb töltést tartalmaz a 72 Ah ás akkumulátor? 2.) Fajlagos ellenállásuk nagysága alapján állítsd sorrendbe a következő fémeket! Kezd a legjobban vezető fémmel! a.) alumínium b.) ezüst c.)
1.) Hány Coulomb töltést tartalmaz a 72 Ah ás akkumulátor? 2.) Fajlagos ellenállásuk nagysága alapján állítsd sorrendbe a következő fémeket! Kezd a legjobban vezető fémmel! a.) alumínium b.) ezüst c.)
Hibriddiagnosztika/1
 1 Gépjárművek üzeme I. laboratóriumi gyakorlat Hibriddiagnosztika/1 Dr. Emőd István Szerkesztette és lektorálta Dr. Varga Ferenc és Dr. Emőd István 2 Hibridhajtás Ez a tananyagot az Emőd-Tölgyesi-Zöldy:
1 Gépjárművek üzeme I. laboratóriumi gyakorlat Hibriddiagnosztika/1 Dr. Emőd István Szerkesztette és lektorálta Dr. Varga Ferenc és Dr. Emőd István 2 Hibridhajtás Ez a tananyagot az Emőd-Tölgyesi-Zöldy:
Energiamegtakarítás SULZER HST Turbókompresszorokkal
 Energiamegtakarítás SULZER HST Turbókompresszorokkal Szennyvíztisztítás Üzemeltetési Költségeinek Csökkentése Szakmai Nap Budapest, 2018. április 19. Miért a sűrített levegő ellátás? Szennyvíztisztító
Energiamegtakarítás SULZER HST Turbókompresszorokkal Szennyvíztisztítás Üzemeltetési Költségeinek Csökkentése Szakmai Nap Budapest, 2018. április 19. Miért a sűrített levegő ellátás? Szennyvíztisztító
www.electromega.hu AZ ELEKTROMOS AUTÓZÁS ELŐNYEI, JÖVŐJE
 AZ ELEKTROMOS AUTÓZÁS ELŐNYEI, JÖVŐJE MI AZ AUTÓK LÉNYEGE? Rövid szabályozott robbanások sorozatán eljutni A -ból B -be. MI IS KELL EHHEZ? MOTOR melyben a robbanások erejéből adódó alternáló mozgást először
AZ ELEKTROMOS AUTÓZÁS ELŐNYEI, JÖVŐJE MI AZ AUTÓK LÉNYEGE? Rövid szabályozott robbanások sorozatán eljutni A -ból B -be. MI IS KELL EHHEZ? MOTOR melyben a robbanások erejéből adódó alternáló mozgást először
Alaplapos útváltó Cetop5 / NG10
 Alaplapos útváltó Cetop5 / NG10 HM03-AD5.1 ARON útváltó alaplapos beépítéshez, csatlakozó furatkép CETOP RP 121H 4.2.4.05 és/vagy UNI ISO 4401-AC-05-4-A szerint. Nagy megengedett térfogatárammal és magas
Alaplapos útváltó Cetop5 / NG10 HM03-AD5.1 ARON útváltó alaplapos beépítéshez, csatlakozó furatkép CETOP RP 121H 4.2.4.05 és/vagy UNI ISO 4401-AC-05-4-A szerint. Nagy megengedett térfogatárammal és magas
Nagyállattenyésztési és Termeléstechnológiai Tanszék VILLAMOSÍTÁS. Gépjármű-villamosság. Készítette: Dr.Desztics Gyula
 Nagyállattenyésztési és Termeléstechnológiai Tanszék VILLAMOSÍTÁS Gépjármű-villamosság Készítette: Dr.Desztics Gyula Járművek elektromos berendezései A traktorok és közúti járművek villamos berendezései
Nagyállattenyésztési és Termeléstechnológiai Tanszék VILLAMOSÍTÁS Gépjármű-villamosság Készítette: Dr.Desztics Gyula Járművek elektromos berendezései A traktorok és közúti járművek villamos berendezései
Mérnöki alapok II. III. Rész Áttekintés az energiaátalakításokról és az energia-átalakítókról
 III. Rész Áttekintés az energiaátalakításokról és az energia-átalakítókról Energia átalakítás Villamos energia átalakítás áttekintése: Az energia, a teljesítmény, és a hatásfok fogalmak áttekintése Az
III. Rész Áttekintés az energiaátalakításokról és az energia-átalakítókról Energia átalakítás Villamos energia átalakítás áttekintése: Az energia, a teljesítmény, és a hatásfok fogalmak áttekintése Az
Garázsajtó nyitó (R-1350 G)
") Garázsajtó nyitó (R-1350 G) Mûszaki adatok: Húzóerô: 1100 N/R-1350G Vezérlô: CPU Vezérlési módszer: impulzus indukció Motor: 24 V Világítás: 1 25 W, E14 Ajtó sebessége: 11 cm/mp Biztosíték típusa: teljesítmény
Garázsajtó nyitó (R-1350 G) Mûszaki adatok: Húzóerô: 1100 N/R-1350G Vezérlô: CPU Vezérlési módszer: impulzus indukció Motor: 24 V Világítás: 1 25 W, E14 Ajtó sebessége: 11 cm/mp Biztosíték típusa: teljesítmény
Elektrotechnika 9. évfolyam
 Elektrotechnika 9. évfolyam Villamos áramkörök A villamos áramkör. A villamos áramkör részei. Ideális feszültségforrás. Fogyasztó. Vezeték. Villamos ellenállás. Ohm törvénye. Részfeszültségek és feszültségesés.
Elektrotechnika 9. évfolyam Villamos áramkörök A villamos áramkör. A villamos áramkör részei. Ideális feszültségforrás. Fogyasztó. Vezeték. Villamos ellenállás. Ohm törvénye. Részfeszültségek és feszültségesés.
11-12. évfolyam. A tantárgy megnevezése: elektrotechnika. Évi óraszám: 69. Tanítási hetek száma: 37 + 32. Tanítási órák száma: 1 óra/hét
 ELEKTROTECHNIKA (VÁLASZTHATÓ) TANTÁRGY 11-12. évfolyam A tantárgy megnevezése: elektrotechnika Évi óraszám: 69 Tanítási hetek száma: 37 + 32 Tanítási órák száma: 1 óra/hét A képzés célja: Választható tantárgyként
ELEKTROTECHNIKA (VÁLASZTHATÓ) TANTÁRGY 11-12. évfolyam A tantárgy megnevezése: elektrotechnika Évi óraszám: 69 Tanítási hetek száma: 37 + 32 Tanítási órák száma: 1 óra/hét A képzés célja: Választható tantárgyként
Irányítástechnika 12. évfolyam
 Irányítástechnika 12. évfolyam Irányítástechnikai alapismeretek Az irányítás fogalma. Irányítási példák. Az irányítás részműveletei: Érzékelés (információszerzés). Ítéletalkotás (az megszerzett információ
Irányítástechnika 12. évfolyam Irányítástechnikai alapismeretek Az irányítás fogalma. Irányítási példák. Az irányítás részműveletei: Érzékelés (információszerzés). Ítéletalkotás (az megszerzett információ
Garázsajtó nyitó (R-1350 G)
") Garázsajtó nyitó (R-1350 G) Mûszaki adatok: Húzóerô: 1100 N/R-1350G Vezérlô: CPU Vezérlési módszer: impulzus indukció Motor: 24 V Világítás: 1 25 W, E14 Ajtó sebessége: 11 cm/mp Biztosíték típusa: teljesítmény
Garázsajtó nyitó (R-1350 G) Mûszaki adatok: Húzóerô: 1100 N/R-1350G Vezérlô: CPU Vezérlési módszer: impulzus indukció Motor: 24 V Világítás: 1 25 W, E14 Ajtó sebessége: 11 cm/mp Biztosíték típusa: teljesítmény
Az elektromos töltések eloszlása atomokban, molekulákban, ionokon belül és a vegyületekben. Vezetők, félvezetők és szigetelők molekuláris szerkezete.
 Szakképesítés: Log Autószerelő - 54 525 02 iszti Tantárgy: Elektrotechnikaelektronika Modul: 10416-12 Közlekedéstechnikai alapok Osztály: 11.a Évfolyam: 11. 36 hét, heti 2 óra, évi 72 óra Ok Dátum: 2013.09.21
Szakképesítés: Log Autószerelő - 54 525 02 iszti Tantárgy: Elektrotechnikaelektronika Modul: 10416-12 Közlekedéstechnikai alapok Osztály: 11.a Évfolyam: 11. 36 hét, heti 2 óra, évi 72 óra Ok Dátum: 2013.09.21
Budapesti Műszaki és Gazdaságtudományi Egyetem Építőgépek, Anyagmozgatógépek és Üzemi Logisztika Tanszék. Közlekedéstan II.
 Budapesti Műszaki és Gazdaságtudományi Egyetem Építőgépek, Anyagmozgatógépek és Üzemi Logisztika Tanszék Közlekedéstan II. (Szemcsés anyagok tömörítése, tömörítőgépek ) Készítette: Dr. Rácz Kornélia egyetemi
Budapesti Műszaki és Gazdaságtudományi Egyetem Építőgépek, Anyagmozgatógépek és Üzemi Logisztika Tanszék Közlekedéstan II. (Szemcsés anyagok tömörítése, tömörítőgépek ) Készítette: Dr. Rácz Kornélia egyetemi
Motortechnológiák és különböző motortechnológiákhoz illeszthető frekvenciaváltók
 Motortechnológiák és különböző motortechnológiákhoz illeszthető frekvenciaváltók Elektronikus akadémia 2017, Zajácz János 1 Danfoss Drives drives.danfoss.hu Az aktuális kérdés: Hatékonyság Miért? Mivel?
Motortechnológiák és különböző motortechnológiákhoz illeszthető frekvenciaváltók Elektronikus akadémia 2017, Zajácz János 1 Danfoss Drives drives.danfoss.hu Az aktuális kérdés: Hatékonyság Miért? Mivel?
= f p képlet szerint. A gép csak ezen a szögsebességen tud állandósult nyomatékot kifejteni.
 44 SZINKRON GÉPEK. Szögsebességük az állórész f 1 frekvenciájához mereven kötődik az ω 2 π = f p képlet szerint. A gép csak ezen a szögsebességen tud állandósult nyomatékot kifejteni. Az állórész felépítése
44 SZINKRON GÉPEK. Szögsebességük az állórész f 1 frekvenciájához mereven kötődik az ω 2 π = f p képlet szerint. A gép csak ezen a szögsebességen tud állandósult nyomatékot kifejteni. Az állórész felépítése
HELYI TANTERV. Gépelemek-géptan
 HELYI TANTERV Gépelemek-géptan 14. évfolyam 72 óra 1.1. A tantárgy tanításának célja A gépelemek-géptan tantárgy tanításának célja, a közlekedéstechnikai gyakorlatban szükséges készségek megszerzése, a
HELYI TANTERV Gépelemek-géptan 14. évfolyam 72 óra 1.1. A tantárgy tanításának célja A gépelemek-géptan tantárgy tanításának célja, a közlekedéstechnikai gyakorlatban szükséges készségek megszerzése, a
GD Dollies Műszaki leírás
 GD Dollies Műszaki leírás A szállítóeszköz elektromos működtetésű, rádiós távvezérlésű két kocsiból álló egység, mely páros és szóló üzemmódban egyaránt használható. Elsősorban beltéri ill. üzemi területen
GD Dollies Műszaki leírás A szállítóeszköz elektromos működtetésű, rádiós távvezérlésű két kocsiból álló egység, mely páros és szóló üzemmódban egyaránt használható. Elsősorban beltéri ill. üzemi területen
Villamos gépek. Villamos forgógépek. Forgógépek elvi felépítése
 Villamos forgógépek Forgógépek elvi felépítése A villamos forgógépek két fő része: az álló- és a forgórész. Az állórészen elhelyezett tekercsek árama mágneses teret létesít. Ez a mágneses tér a mozgási
Villamos forgógépek Forgógépek elvi felépítése A villamos forgógépek két fő része: az álló- és a forgórész. Az állórészen elhelyezett tekercsek árama mágneses teret létesít. Ez a mágneses tér a mozgási
Az első robot sorozatgyártás 1959-ben indul ben már játékgyártók kínálnak tanítható, mikroprocesszor vezérlésű játékrobot építőszettet.
 A robotok előhírnökei az önműködő szerkezetek (automaták) voltak. "Író fiú", egy svájci órás műve 1772-ből, mely karszerkezet segítségével képes volt tollal papírra írni. 1893-ban, Amerikában már beépített
A robotok előhírnökei az önműködő szerkezetek (automaták) voltak. "Író fiú", egy svájci órás műve 1772-ből, mely karszerkezet segítségével képes volt tollal papírra írni. 1893-ban, Amerikában már beépített
Beavatkozószervek. Összeállította: dr. Gerzson Miklós egyetemi docens Pannon Egyetem Automatizálási Tanszék
 Beavatkozószervek Összeállította: dr. Gerzson Miklós egyetemi docens Pannon Egyetem Automatizálási Tanszék 2007.12.02. 1 Beavatkozószervek beavatkozószervek feladatuk: az irányítórendszertől (szabályzó
Beavatkozószervek Összeállította: dr. Gerzson Miklós egyetemi docens Pannon Egyetem Automatizálási Tanszék 2007.12.02. 1 Beavatkozószervek beavatkozószervek feladatuk: az irányítórendszertől (szabályzó