Érzékelők és beavatkozók
|
|
|
- Kornél Magyar
- 7 évvel ezelőtt
- Látták:
Átírás
1 Érzékelők és beavatkozók Léptetőmotorok egyetemi docens - 1 -
2 Léptetőmotorok A léptetőmotorok alapvető tulajdonságai: A forgórész diszkrét szöghelyzetekbe állítható be. Az adott szögpozícióban tartó nyomatékot fejt ki. Alapvető működtetési elv: léptetés valamennyi lépés megtétele valamilyen forgásirányban. A léptetőmotorok alkalmazási köre (példák): Vezérlések, szabályozások beavatkozó elemeiként. Ipari, orvostechnikai rendszerek, járművek nem hajtás jellegű rendszerei. Számítástechnikai rendszerek: diszkek, CD-DVD tárolók. Háztartási gépek vezérlése: mosógép, mosogatógép
3 Léptetőmotorok A léptetőmotorok előnyei: Egyszerűen átlátható módon kezelhető eszközök. Beállás / tartás az alapvető pontosságig (1 - ½ lépés) és nyomatékig nem igényel szabályozást. Kissé bonyolultabb vezérléssel illetve visszacsatolt szabályozással a pontosság fokozható. A diszkrét digitális irányításoknak jól megfelelő működési elv. Egyszerűen, robusztusan jó paraméter-tartással nagy tömegben gyártható termékek. Megbízható, jó környezetállósággal bíró termékek. Gazdaságosan alkalmazható alternatíva a vezérlések megvalósításában
4 Léptetőmotorok A léptetőmotorok előnyei további szempontok: Nincsenek kontaktusok, kefék nagy megbízhatóság és kis karbantartásigény. Nincsenek kontaktusok, kefék alacsony elektromágneses emisszió, jó EMC tulajdonságok. Az egyes szöghelyzetek azonos hibával (tipikusan 3-5 %) mindig beállíthatók, nincs kumulatív hiba. A működési sebesség a léptetés gyakoriságának (frekvenciájának) függvénye, egészen kis fordulatszámok is elérhetők
5 Léptetőmotorok A léptetőmotorok hátrányai: Diszkrét idejű működés. A lépések között egyenetlenségek a fordulatszámban és a nyomatékban. Korlátozott sebesség a maximális lépésfrekvencia katalógusadat
6 Léptetőmotor típusok Az alapvető léptetőmotor családok: Reluktancia tipusú (Variable Reluctance VR), Állandó mágneses (Permanent Magnet PM), Hibrid (Hybrid) léptetőmotorok. Az állórész-tekercsek kialakítása szerint: Unipoláris, Bipoláris, Bifiláris léptetőmotorok. A fázisok száma szerint: Kétfázisú, 3-5-fázisú léptetőmotorok
.")
7 Állandó mágneses léptetőmotorok Sávosan felmágnesezett forgórész. 2 elektromágnes egy-egy póluspárral szemben. Az áramiránytól függően taszítás vagy vonzás az állóés forgórész mágneses pólusai között. Tiszta vonzás esetén beállás (stabil egyensúlyi helyzet). Megfelelő sorrendű vezérlés mellett léptetés és forgás idézhető elő



8 Állandó mágneses léptetőmotorok Általában kis felbontás érhető el ( / lépés fordulatonként). Olcsó, kis igényű léptetőmotorok. Előnyeik: kis tehetetlenségű forgórész, egyenletes mágneses fluxuseloszlás érhető el
9 Reluktancia típusú léptetőmotorok Mágneses reluktancia más néven mágneses ellenállás: Mágneses pólusok között fellépő erő és a mágneses fluxus közti arány egyszerűsítéssel lineáris összefüggést feltételezve F = R*Φ Ohm törvényre emlékeztető forma. Nagyobb reluktancia azonos fluxus mellett nagyobb erőt eredményez. Az erőeloszlás azonos gerjesztés mellett - a reluktancia függvényében változik. Nemegyenletes reluktancia inhomogén erőeloszlást eredményez. Mikor kapunk nagyobb reluktanciát egy mágneses körben? Sűrűsödő mágneses erővonalak egy adott térrészben a pólusok alakjának kellő megválasztásával érhető el. Kisebb légrés a pólusok között nagyobb reluktanciát eredményez
10 Reluktancia típusú léptetőmotorok Lágy ferromágneses anyagú hornyolt forgórész. Az állórész pólusainak és a forgórész hornyainak száma eltérő. A mágneses kör reluktanciája a kerület mentén változik. A maximális reluktanciájú helyek ha gerjesztés alatt állnak stabil egyensúlyi helyzetet képviselnek. A gerjesztés továbblépésével a stabil helyzet is tovább lép
11 Reluktancia típusú léptetőmotorok Allórész pólusainak száma: 8, 45 -os eloszlásban. Forgórész hornyainak száma: 6, 60 -os eloszlásban. A szögeltérés 15. Gerjesztési sorozat: A A, B B, C C, D D 4-fázisú gerjesztés Minden lépésben a forgórész 15 -ot lép előre az óramutató járásával azonos irányban. Lépéshossz: 15 Lépésszám:



12 Reluktancia típusú léptetőmotorok Forgórész megvalósítások: Fogazott forgórész: a lépésszám növelhető

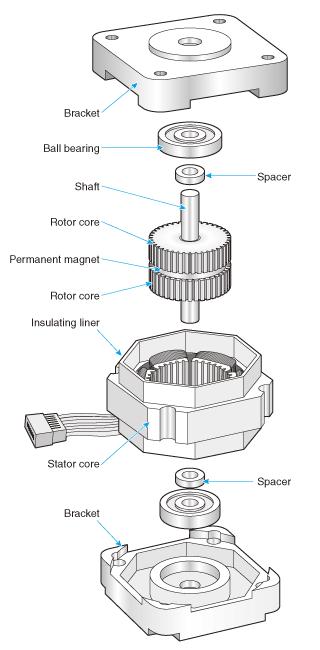
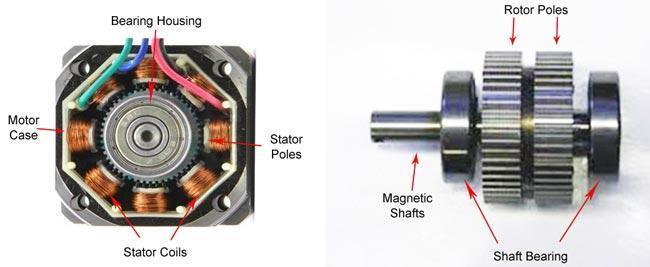
13 Hibrid léptetőmotorok Változó reluktancia és állandó mágnes kombinációja. A forgórész tipikus elrendezése: Reluktancia típusú lágy ferromágneses forgórész szegmensek fél fázis eltolással, közöttük állandó mágnes axiális mágnesezéssel. A forgórész szegmensek ellentétes mágneses pólust képviselnek

14 Hibrid léptetőmotorok
15 Hibrid léptetőmotorok Az állórész tipikus elrendezése: hornyolt vasmag A hornyok ugyanolyan szöggel követik egymást, mint az forgórészen. Példa: Forgórészen / 360 Fogosztás: fog A két hornyolt tárcsán ellenütemű fogazás: fogak horonnyal találkoznak
16 Hibrid léptetőmotorok Vezérlési példa: 4-fázisú (4 lépéses periódus) Step 3 Step
17 Hibrid léptetőmotorok Állórész / forgórész viszonya az egyes lépésekben:
18 Hibrid léptetőmotorok Állórész / forgórész viszonya az egyes lépésekben: Egyensúlyi helyzet: a forgórész álló helyzetben marad alsó felső hornyolt tárcsa fog mechanikailag 180 fáziseltolással 90 fáziseltérés (1.8 fizikailag): a forgórészre nyomaték hat, a forgórész új egyensúlyi helyzetbe fordul. Forgó mágneses tér lép fel, amely a forgórészre nyomatékkal hat
19 Hibrid léptetőmotorok A forgórész elfordulása két lépés között: fogak közti szög / 4 = 7.2 / 4 = 1.8 Szögfelbontás: 1.8 Teljes fordulatonkénti lépésszám: 50 * 4 = 200 a példa szerinti léptetőmotorra


20 Léptetőmotor adatok: Hibrid léptetőmotorok tipikus ( lépésszám)
21 Hibrid léptetőmotorok Adatlap 1. oldal

22 Hibrid léptetőmotorok Adatlap 2. oldal
23 Állórész tekercsek bekötése / vezérlése VR léptetőmotorok 3-fázisú példa fázisú motorok: tekercsek csillagkapcsolásban Vezérlési szekvencia: 1. tekercs tekercs tekercs
24 Állórész tekercsek bekötése / vezérlése PM és hibrid léptetőmotorok (a PM példáján bemutatva): Unipoláris léptetőmotorok: A földhöz képest pozitív feszültségekkel vezéreljük az egyes tekercs-ágakat. Bipoláris léptetőmotorok: Két különböző polaritással vezéreljük az egyes tekercseket
25 Állórész tekercsek bekötése / vezérlése Unipoláris vezérlés: 1. vezérlési szekvencia: egy időben csak egy fél-tekercset vezérelünk kisebb nyomaték / fogyasztás 1a. tekercs b. tekercs a. tekercs b. tekercs lépés / fordulat
26 Állórész tekercsek bekötése / vezérlése Unipoláris vezérlés: 2. vezérlési szekvencia: egy időben két fél-tekercset vezérelünk nagyobb nyomaték / fogyasztás 1a. tekercs b. tekercs a. tekercs b. tekercs lépés / fordulat
27 Állórész tekercsek bekötése / vezérlése Unipoláris vezérlés: 3. vezérlési szekvencia: ½-lépéses vezérlés 1a. tekercs b. tekercs a. tekercs b. tekercs lépés / fordulat: kétszeres felbontás
28 Állórész tekercsek bekötése / vezérlése Bipoláris vezérlés: 1. vezérlési szekvencia: teljes lépéses vezérlés egyszerre csak egy tekercset vezérlünk kisebb nyomaték / fogyasztás 1a. tekercs b. tekercs a. tekercs b. tekercs lépés / fordulat
29 Állórész tekercsek bekötése / vezérlése Bipoláris vezérlés: 2. vezérlési szekvencia: teljes lépéses vezérlés egyszerre két tekercset vezérlünk nagyobb nyomaték / fogyasztás 1a. tekercs b. tekercs a. tekercs b. tekercs lépés / fordulat
30 Állórész tekercsek bekötése / vezérlése Unipoláris vezérlés: 2. vezérlési szekvencia: ½-lépéses vezérlés vegyesen 1 ill. 2 tekercs egyidejű vezérlése 1a. tekercs b. tekercs a. tekercs b. tekercs lépés / fordulat: kétszeres felbontás
31 Állórész tekercsek bekötése / vezérlése Bifiláris tekercselés: párhuzamosan haladó két egymástól elszigetelt vezetékkel készül. Bifiláris léptetőmotorok: Előnyeik: Akár unipoláris, akár bipoláris módban üzemeltethetők. Soros és párhuzamos kapcsolásokkal különböző feszültség-, áram-, és ezzel együtt teljesítmény- és nyomatékviszonyok állíthatók be
32 Mikrolépéses vezérlés A léptetések közti átmenet finomítása: a tekercsek vezérlésében fokozatos átmenetek biztosítása. Módszer: a tekercsáramok folytonos változtatása ma PWM technikával. Egy stratégia hibrid léptetőmotorra: I I 1 MAX cos 2 I I 2 MAX sin 2 σ lépésszög (rad) θ kívánt szög (rad)
33 Előnyök: Mikrolépéses vezérlés Tetszőleges mértékben finomítható a lépésszög (gyakorlati korlátok tipikusan max. 1/32). Az alternatív mechanikus áttételhez képest nincs játék és járulékos súrlódás. Egyenletes fordulatszám- és nyomatékprofil. Korlátok: Nemlinearitások: holtsáv és súrlódás. Bizonytalanságok a tekercsek kialakításában rontják a pontosságot. Hátrányok: Bonyolultabb vezérlő hardver és szoftver
34 Vezérlő hálózatok Léptetőmotorok vezérlése: kapcsolóhálózatokkal. Kapcsolók realizálása: tranzisztorok, MOSFET-ek. Kapcsolási szekvenciák előállítása: Logikai áramkörökkel, Mikrovezérlőkkel, Speciálisan erre a célra tervezett integrált léptetőmotor vezérlőkkel
35 VR vezérlőhálózat: Vezérlő hálózatok
36 Unipoláris vezérlő hálózat: Vezérlő hálózatok
37 Bipoláris vezérlő hálózat: Vezérlő hálózatok
38 Induktív terhelésből eredő problémák +V A gerjesztő feszültség kikapcsolásakor (a PWM impulzusok közötti szünetekben) a tekercs induktivitásán nagy ellentétes irányú feszültség indukálódik ellentétes polaritású diódák a MOSFET-ekben +V V (dióda nyitófeszültsége) meghaladása, vagy ellentétes irányban GND 0.6 V túllépése esetén a megfelelő diódák kinyitnak korlátozzák a feszültséget levezetik az keletkező áramot
39 Induktív terhelésből eredő problémák Problémák: Nem minden kapcsolótípusban vannak ilyen diódák, ezek hiányában a kapcsolók, a meghajtó áramkörök meghibásodhatnak. A diódák nyitása nagy áram-tranzienseket idéz elő, amely elektromágneses zavarjeleket kelt (EMC követelmények sérülnek). A tápegységek nem feltétlenül tudják elnyelni ezeket az áramokat. A diódák nyitása hosszú idejű tranzienseket hoz létre, ez alatt a motor lépéseket veszíthet. Megoldás: Az áram-visszavezetés kezelése Gyors áram-visszavezetés (fast decay) Lassú áram-visszavezetés (slow decay) Vegyes áram-visszavezetés (mixed decay)
40 Induktív terhelésből eredő problémák Gyors áram-visszavezetés (fast decay mode): ellentétes irányba kapcsolás Lassú áram-visszavezetés (slow decay mode): fék üzemmódba kapcsolás Vegyes áram-visszavezetés (mixed decay mode): a kettő kombinációja időben elosztva

41 Vezérlő áramkörök Trinamic TMC246 léptetőmotor vezérlő áramkör: Bipoláris léptetőmotorokhoz Beépített MOSFET kapcsolók 1.5 A áramig SPI programozható Áramszabályozás, áramvisszavezetés vezérlés Rövidzár-, túláram-, termikus védelem Jelváltozás-korlátozás jobb EMC viselkedéshez Lágy indítás / működés támogatása Mikrolépéses vezérlés megvalósítása 1/16 lépésig

42 Vezérlő áramkörök Trinamic TMC246 alapú léptetőmotor vezérlő áramkör:
 =1Ω, max. áram 1.")

43 Vezérlő áramkörök Texas Instruments DEV8811 léptetőmotor vezérlő áramkör: Bipoláris léptetőmotorokhoz Beépített MOSFET-ek R DS(ON) =1Ω, max. áram 1.9 A STEP-DIR jellegű interfész Áramszabályozás Programozható áramvisszavezetés vezérlés Túláram- és termikus védelem Hibaállapot jelzés Teljes, 1/2, 1/4, és 1/8 lépéses vezérlés

44 Vezérlő áramkörök Allegro A4988 léptetőmotor vezérlő áramkör: Bipoláris léptetőmotorokhoz Step-Dir jellegű interfész Áramszabályozás Automatikus áramvisszavezetés vezérlés Rövidzár-, túláram-, túlfeszültség-védelem, termikus védelem Jelváltozás-korlátozás jobb EMC viselkedéshez Teljes, 1/2, 1/4, 1/8, és 1/16 lépéses vezérlés
ÉRZÉKELŐK ÉS BEAVATKOZÓK II. 9. LÉPTETŐMOTOROK
 ÉRZÉKELŐK ÉS BEAVATKOZÓK II. 9. LÉPTETŐMOTOROK Dr. Soumelidis Alexandros 2019.04.24. BME KÖZLEKEDÉSMÉRNÖKI ÉS JÁRMŰMÉRNÖKI KAR 32708-2/2017/INTFIN SZÁMÚ EMMI ÁLTAL TÁMOGATOTT TANANYAG Léptetőmotorok A
ÉRZÉKELŐK ÉS BEAVATKOZÓK II. 9. LÉPTETŐMOTOROK Dr. Soumelidis Alexandros 2019.04.24. BME KÖZLEKEDÉSMÉRNÖKI ÉS JÁRMŰMÉRNÖKI KAR 32708-2/2017/INTFIN SZÁMÚ EMMI ÁLTAL TÁMOGATOTT TANANYAG Léptetőmotorok A
E-Laboratórium 2 A léptetőmotorok alkalmazásai Elméleti leírás
 E-Laboratórium 2 A léptetőmotorok alkalmazásai Elméleti leírás 1. Bevezető A szinkronmotorok csoportjában egy külön helyet a léptetőmotor foglal el, aminek a diszkrét működését, vagyis a léptetést, egy
E-Laboratórium 2 A léptetőmotorok alkalmazásai Elméleti leírás 1. Bevezető A szinkronmotorok csoportjában egy külön helyet a léptetőmotor foglal el, aminek a diszkrét működését, vagyis a léptetést, egy
TB6600 V1 Léptetőmotor vezérlő
 TB6600 V1 Léptetőmotor vezérlő Mikrolépés lehetősége: 1, 1/2, 1/4, 1/8, 1/16. A vezérlő egy motor meghajtására képes 0,5-4,5A között állítható motoráram Tápellátás: 12-45V közötti feszültséget igényel
TB6600 V1 Léptetőmotor vezérlő Mikrolépés lehetősége: 1, 1/2, 1/4, 1/8, 1/16. A vezérlő egy motor meghajtására képes 0,5-4,5A között állítható motoráram Tápellátás: 12-45V közötti feszültséget igényel
Érzékelők és beavatkozók
 Érzékelők és beavatkozók DC motorok 1. rész egyetemi docens - 1 - Főbb típusok: Elektromos motorok Egyenáramú motor DC motor. Kefenélküli egyenáramú motor BLDC motor. Indukciós motor AC motor aszinkron
Érzékelők és beavatkozók DC motorok 1. rész egyetemi docens - 1 - Főbb típusok: Elektromos motorok Egyenáramú motor DC motor. Kefenélküli egyenáramú motor BLDC motor. Indukciós motor AC motor aszinkron
SK6560T Léptetőmotor meghajtó
 SK6560T Léptetőmotor meghajtó Mikrolépés lehetősége: 1, 1/2, 1/8, 1/16. A vezérlő egy motor meghajtására képes 0,5-2,5A között állítható motor-áram (max. csúcsáram 3A) Százalékos tartóáram csökkentés Engedélyező
SK6560T Léptetőmotor meghajtó Mikrolépés lehetősége: 1, 1/2, 1/8, 1/16. A vezérlő egy motor meghajtására képes 0,5-2,5A között állítható motor-áram (max. csúcsáram 3A) Százalékos tartóáram csökkentés Engedélyező
Alapfogalmak, osztályozás
 VILLAMOS GÉPEK Alapfogalmak, osztályozás Gépek: szerkezetek, amelyek energia felhasználása árán munkát végeznek, vagy a felhasznált energiát átalakítják más jellegű energiává Működési elv: indukált áram
VILLAMOS GÉPEK Alapfogalmak, osztályozás Gépek: szerkezetek, amelyek energia felhasználása árán munkát végeznek, vagy a felhasznált energiát átalakítják más jellegű energiává Működési elv: indukált áram
Érzékelők és beavatkozók
 Érzékelők és beavatkozók DC motorok 3. rész egyetemi docens - 1 - DC motorvezérlés H-híd: +V r Motor mozgatás előre Motor mozgatás hátra Fékezés Szabadonfutás a vezérlés függvényében UL LL + Ø - UR LR
Érzékelők és beavatkozók DC motorok 3. rész egyetemi docens - 1 - DC motorvezérlés H-híd: +V r Motor mozgatás előre Motor mozgatás hátra Fékezés Szabadonfutás a vezérlés függvényében UL LL + Ø - UR LR
Elektrotechnika. 11. előadás. Összeállította: Dr. Hodossy László
 11. előadás Összeállította: Dr. Hodossy László 1. Szerkezeti felépítés 2. Működés 3. Működés 4. Armatúra reakció 5. Armatúra reakció 6. Egyenáramú gépek osztályozása 7. Külső 8. Külső. 9. Soros. 10. Soros
11. előadás Összeállította: Dr. Hodossy László 1. Szerkezeti felépítés 2. Működés 3. Működés 4. Armatúra reakció 5. Armatúra reakció 6. Egyenáramú gépek osztályozása 7. Külső 8. Külső. 9. Soros. 10. Soros
ÉRZÉKELŐK ÉS BEAVATKOZÓK II. 4. DC MOTOROK VEZÉRLÉS
 ÉRZÉKELŐK ÉS BEAVATKOZÓK II. 4. DC MOTOROK VEZÉRLÉS Dr. Soumelidis Alexandros 2019.03.06. BME KÖZLEKEDÉSMÉRNÖKI ÉS JÁRMŰMÉRNÖKI KAR 32708-2/2017/INTFIN SZÁMÚ EMMI ÁLTAL TÁMOGATOTT TANANYAG DC motorvezérlés
ÉRZÉKELŐK ÉS BEAVATKOZÓK II. 4. DC MOTOROK VEZÉRLÉS Dr. Soumelidis Alexandros 2019.03.06. BME KÖZLEKEDÉSMÉRNÖKI ÉS JÁRMŰMÉRNÖKI KAR 32708-2/2017/INTFIN SZÁMÚ EMMI ÁLTAL TÁMOGATOTT TANANYAG DC motorvezérlés
Budapest Műszaki Főiskola Bánki Donát Gépész és Biztonságtechnikai Kar Mechatronikai és Autotechnikai Intézet. Elektrotechnika
 Budapest Műszaki Főiskola Bánki Donát Gépész és Biztonságtechnikai Kar Mechatronikai és Autotechnikai Intézet Elektrotechnika Különleges motorok Összeállította: Lukács Attila PhD hallgató (BME MOGI) és
Budapest Műszaki Főiskola Bánki Donát Gépész és Biztonságtechnikai Kar Mechatronikai és Autotechnikai Intézet Elektrotechnika Különleges motorok Összeállította: Lukács Attila PhD hallgató (BME MOGI) és
Felhasználói kézikönyv. Zárt hurkú, léptetőmotoros rendszer, HSS60 típusú meghajtó és 60HSE3N-D25 motorral.
 Felhasználói kézikönyv Zárt hurkú, léptetőmotoros rendszer, HSS60 típusú meghajtó és 60HSE3N-D25 motorral. Bevezetés A HSS60 egy új típusú léptetőmotor meghajtó, mely enkóderrel visszacsatolt, áramvektoros
Felhasználói kézikönyv Zárt hurkú, léptetőmotoros rendszer, HSS60 típusú meghajtó és 60HSE3N-D25 motorral. Bevezetés A HSS60 egy új típusú léptetőmotor meghajtó, mely enkóderrel visszacsatolt, áramvektoros
HSS60 ( ) típusú léptetőmotor meghajtó
 típusú léptetőmotor meghajtó") HSS60 (93.034.027) típusú léptetőmotor meghajtó Jellemzők Teljesen zárt kör Alacsony motorzaj Alacsony meghajtó és motormelegedés Gyors válaszidő, nagy motorsebesség Optikailag leválasztott ki és bemenetek
HSS60 (93.034.027) típusú léptetőmotor meghajtó Jellemzők Teljesen zárt kör Alacsony motorzaj Alacsony meghajtó és motormelegedés Gyors válaszidő, nagy motorsebesség Optikailag leválasztott ki és bemenetek
HSS86 ( ) típusú léptetőmotor meghajtó
 típusú léptetőmotor meghajtó") HSS86 (93.034.028) típusú léptetőmotor meghajtó Jellemzők Teljesen zárt kör Alacsony motorzaj Alacsony meghajtó és motormelegedés Gyors válaszidő, nagy motorsebesség Optikailag leválasztott ki és bemenetek
HSS86 (93.034.028) típusú léptetőmotor meghajtó Jellemzők Teljesen zárt kör Alacsony motorzaj Alacsony meghajtó és motormelegedés Gyors válaszidő, nagy motorsebesség Optikailag leválasztott ki és bemenetek
Az aszinkron és a szinkron gépek külső mágnesének vasmagja, -amelyik általában az
 8 FORGÓMEZŐS GÉPEK. Az aszinkron és a szinkron géek külső mágnesének vasmagja, -amelyik általában az állórész,- hengergyűrű alakú. A D átmérőjű belső felületén tengelyirányban hornyokat mélyítenek, és
8 FORGÓMEZŐS GÉPEK. Az aszinkron és a szinkron géek külső mágnesének vasmagja, -amelyik általában az állórész,- hengergyűrű alakú. A D átmérőjű belső felületén tengelyirányban hornyokat mélyítenek, és
Érzékelők és beavatkozók
 Érzékelők és beavatkozók AC motorok egyetemi docens - 1 - AC motorok Félrevezető elnevezés, mert: Arra utal, hogy váltakozó árammal működő motorokról van szó, pedig ma vannak egyenfeszültségről táplált
Érzékelők és beavatkozók AC motorok egyetemi docens - 1 - AC motorok Félrevezető elnevezés, mert: Arra utal, hogy váltakozó árammal működő motorokról van szó, pedig ma vannak egyenfeszültségről táplált
Elektrotechnika. Dr. Hodossy László előadás
 Elektrotechnika 13 előadás Dr Hodossy László 2006 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 Szervo Lineáris Lineáris Lineáris Szervo Vezérlő és szabályozó rendszerekben pozícionálási célra alkalmazzák
Elektrotechnika 13 előadás Dr Hodossy László 2006 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 Szervo Lineáris Lineáris Lineáris Szervo Vezérlő és szabályozó rendszerekben pozícionálási célra alkalmazzák
Felhasználói kézikönyv. 3DM860A típusú léptetőmotor meghajtó
 Felhasználói kézikönyv 3DM860A típusú léptetőmotor meghajtó Bevezetés A 3DM860A egy új generációs léptetőmotor meghajtó, a 32 bites digitális jelfeldolgozásnak (DSP) köszönhetően, lépésvesztés lehetősége
Felhasználói kézikönyv 3DM860A típusú léptetőmotor meghajtó Bevezetés A 3DM860A egy új generációs léptetőmotor meghajtó, a 32 bites digitális jelfeldolgozásnak (DSP) köszönhetően, lépésvesztés lehetősége
Használható segédeszköz: szabványok, táblázatok, gépkönyvek, számológép
 A 27/2012 (VIII. 27.) NGM rendelet (12/2013 (III.28) NGM rendelet által módosított) szakmai és vizsgakövetelménye alapján. Szakképesítés, azonosító száma és megnevezése 34 522 02 Elektromos gép- és készülékszerelő
A 27/2012 (VIII. 27.) NGM rendelet (12/2013 (III.28) NGM rendelet által módosított) szakmai és vizsgakövetelménye alapján. Szakképesítés, azonosító száma és megnevezése 34 522 02 Elektromos gép- és készülékszerelő
Felhasználói kézikönyv. 3DM2280A típusú léptetőmotor meghajtó
 Felhasználói kézikönyv 3DM2280A típusú léptetőmotor meghajtó Bevezetés A 3DM2280A egy új generációs léptetőmotor meghajtó, a 32 bites digitális jelfeldolgozásnak (DSP) köszönhetően, lépésvesztés lehetősége
Felhasználói kézikönyv 3DM2280A típusú léptetőmotor meghajtó Bevezetés A 3DM2280A egy új generációs léptetőmotor meghajtó, a 32 bites digitális jelfeldolgozásnak (DSP) köszönhetően, lépésvesztés lehetősége
Hálózati egyenirányítók, feszültségsokszorozók Egyenirányító kapcsolások
 Hálózati egyenirányítók, feszültségsokszorozók Egyenirányító kapcsolások Egyenirányítás: egyenáramú komponenst nem tartalmazó jelből egyenáramú összetevő előállítása. Nemlineáris áramköri elemet tartalmazó
Hálózati egyenirányítók, feszültségsokszorozók Egyenirányító kapcsolások Egyenirányítás: egyenáramú komponenst nem tartalmazó jelből egyenáramú összetevő előállítása. Nemlineáris áramköri elemet tartalmazó
Tételek Elektrotechnika és elektronika I tantárgy szóbeli részéhez 1 1. AZ ELEKTROSZTATIKA ALAPJAI AZ ELEKTROMOS TÖLTÉS FOGALMA 8 1.
 Tételek Elektrotechnika és elektronika I tantárgy szóbeli részéhez 1 1. AZ ELEKTROSZTATIKA ALAPJAI 8 1.1 AZ ELEKTROMOS TÖLTÉS FOGALMA 8 1.2 AZ ELEKTROMOS TÉR 9 1.3 COULOMB TÖRVÉNYE 10 1.4 AZ ELEKTROMOS
Tételek Elektrotechnika és elektronika I tantárgy szóbeli részéhez 1 1. AZ ELEKTROSZTATIKA ALAPJAI 8 1.1 AZ ELEKTROMOS TÖLTÉS FOGALMA 8 1.2 AZ ELEKTROMOS TÉR 9 1.3 COULOMB TÖRVÉNYE 10 1.4 AZ ELEKTROMOS
Bevezetés az elektronikába
 Bevezetés az elektronikába 6. Feladatsor: Egyszerű tranzisztoros kapcsolások Hobbielektronika csoport 2017/2018 1 Debreceni Megtestesülés Plébánia Tranziens (átmeneti) jelenségek Az előzőekben csupán az
Bevezetés az elektronikába 6. Feladatsor: Egyszerű tranzisztoros kapcsolások Hobbielektronika csoport 2017/2018 1 Debreceni Megtestesülés Plébánia Tranziens (átmeneti) jelenségek Az előzőekben csupán az
Motortechnológiák és különböző motortechnológiákhoz illeszthető frekvenciaváltók
 Motortechnológiák és különböző motortechnológiákhoz illeszthető frekvenciaváltók Elektronikus akadémia 2017, Zajácz János 1 Danfoss Drives drives.danfoss.hu Az aktuális kérdés: Hatékonyság Miért? Mivel?
Motortechnológiák és különböző motortechnológiákhoz illeszthető frekvenciaváltók Elektronikus akadémia 2017, Zajácz János 1 Danfoss Drives drives.danfoss.hu Az aktuális kérdés: Hatékonyság Miért? Mivel?
ÉRZÉKELŐK ÉS BEAVATKOZÓK II. 5. DC MOTOROK SZABÁLYOZÁS FORDULATSZÁM- SZABÁLYOZÁS
 ÉRZÉKELŐK ÉS BEAVATKOZÓK II. 5. DC MOTOROK SZABÁLYOZÁS FORDULATSZÁM- SZABÁLYOZÁS Dr. Soumelidis Alexandros 2019.03.13. BME KÖZLEKEDÉSMÉRNÖKI ÉS JÁRMŰMÉRNÖKI KAR 32708-2/2017/INTFIN SZÁMÚ EMMI ÁLTAL TÁMOGATOTT
ÉRZÉKELŐK ÉS BEAVATKOZÓK II. 5. DC MOTOROK SZABÁLYOZÁS FORDULATSZÁM- SZABÁLYOZÁS Dr. Soumelidis Alexandros 2019.03.13. BME KÖZLEKEDÉSMÉRNÖKI ÉS JÁRMŰMÉRNÖKI KAR 32708-2/2017/INTFIN SZÁMÚ EMMI ÁLTAL TÁMOGATOTT
ÉRZÉKELŐK ÉS BEAVATKOZÓK II. 8. AC MOTOROK
 ÉRZÉKELŐK ÉS BEAVATKOZÓK II. 8. AC MOTOROK Dr. Soumelidis Alexandros 2019.04.16. BME KÖZLEKEDÉSMÉRNÖKI ÉS JÁRMŰMÉRNÖKI KAR 32708-2/2017/INTFIN SZÁMÚ EMMI ÁLTAL TÁMOGATOTT TANANYAG AC motorok Félrevezető
ÉRZÉKELŐK ÉS BEAVATKOZÓK II. 8. AC MOTOROK Dr. Soumelidis Alexandros 2019.04.16. BME KÖZLEKEDÉSMÉRNÖKI ÉS JÁRMŰMÉRNÖKI KAR 32708-2/2017/INTFIN SZÁMÚ EMMI ÁLTAL TÁMOGATOTT TANANYAG AC motorok Félrevezető
BSD2010 BSD4010. Bipoláris léptetőmotor meghajtó modulok felhasználói kézikönyve
 BSD2010 BSD4010 Bipoláris léptetőmotor meghajtó modulok felhasználói kézikönyve Q-Tech Mérnöki Szolgáltató Kft. 2003 -2- Tartalomjegyzék Felhasználói kézikönyv 1 Bevezetés... 4 Jellemzők... 4 A meghajtó
BSD2010 BSD4010 Bipoláris léptetőmotor meghajtó modulok felhasználói kézikönyve Q-Tech Mérnöki Szolgáltató Kft. 2003 -2- Tartalomjegyzék Felhasználói kézikönyv 1 Bevezetés... 4 Jellemzők... 4 A meghajtó
Elektronika 11. évfolyam
 Elektronika 11. évfolyam Áramköri elemek csoportosítása. (Aktív-passzív, lineáris- nem lineáris,) Áramkörök csoportosítása. (Aktív-passzív, lineáris- nem lineáris, kétpólusok-négypólusok) Két-pólusok csoportosítása.
Elektronika 11. évfolyam Áramköri elemek csoportosítása. (Aktív-passzív, lineáris- nem lineáris,) Áramkörök csoportosítása. (Aktív-passzív, lineáris- nem lineáris, kétpólusok-négypólusok) Két-pólusok csoportosítása.
VILLAMOS FORGÓGÉPEK. Forgó mozgás létesítése
 SZÉCHENYI ISTVÁN EGYETEM HTTP://UNI.SZE.HU VILLAMOS FORGÓGÉPEK Forgó mozgás létesítése Marcsa Dániel Villamos gépek és energetika 203/204 - őszi szemeszter Elektromechanikai átalakítás Villamos rendszer
SZÉCHENYI ISTVÁN EGYETEM HTTP://UNI.SZE.HU VILLAMOS FORGÓGÉPEK Forgó mozgás létesítése Marcsa Dániel Villamos gépek és energetika 203/204 - őszi szemeszter Elektromechanikai átalakítás Villamos rendszer
Felhasználói kézikönyv. DM556D típusú léptetőmotor meghajtó
 Felhasználói kézikönyv DM556D típusú léptetőmotor meghajtó Bevezetés A DM556D egy új generációs léptetőmotor meghajtó, a 32 bites digitális jelfeldolgozásnak (DSP) köszönhetően, lépésvesztés lehetősége
Felhasználói kézikönyv DM556D típusú léptetőmotor meghajtó Bevezetés A DM556D egy új generációs léptetőmotor meghajtó, a 32 bites digitális jelfeldolgozásnak (DSP) köszönhetően, lépésvesztés lehetősége
Felhasználói kézikönyv. DM2280A típusú léptetőmotor meghajtó
 Felhasználói kézikönyv DM2280A típusú léptetőmotor meghajtó Bevezetés A DM2280A egy új generációs léptetőmotor meghajtó, a 32 bites digitális jelfeldolgozásnak (DSP) köszönhetően, lépésvesztés lehetősége
Felhasználói kézikönyv DM2280A típusú léptetőmotor meghajtó Bevezetés A DM2280A egy új generációs léptetőmotor meghajtó, a 32 bites digitális jelfeldolgozásnak (DSP) köszönhetően, lépésvesztés lehetősége
Felhasználói kézikönyv MC442H típusú léptetőmotor meghajtóhoz
 Felhasználói kézikönyv MC442H típusú léptetőmotor meghajtóhoz Műszaki adatok: Kimeneti áram: 1,0 4,2 A 15 beállítható mikró lépés felbontás (400-25 600 lépcső / fordulat) Rms érték: 3,0 A Tápfeszültség:
Felhasználói kézikönyv MC442H típusú léptetőmotor meghajtóhoz Műszaki adatok: Kimeneti áram: 1,0 4,2 A 15 beállítható mikró lépés felbontás (400-25 600 lépcső / fordulat) Rms érték: 3,0 A Tápfeszültség:
Egyenáramú gépek. Felépítés
 Egyenármú gépek Felépítés 1. Állórész koszorú 2. Főpólus 3. Segédpólus 4. Forgórész koszorú 5. Armtúr tekercselés 6. Pólus fluxus 7. Kompenzáló tekercselés 1 Állórész - Tömör vstest - Tömör vs pólus -
Egyenármú gépek Felépítés 1. Állórész koszorú 2. Főpólus 3. Segédpólus 4. Forgórész koszorú 5. Armtúr tekercselés 6. Pólus fluxus 7. Kompenzáló tekercselés 1 Állórész - Tömör vstest - Tömör vs pólus -
VÁLTAKOZÓ ÁRAM JELLEMZŐI
 VÁLTAKOZÓ ÁA JELLEZŐI Ohmos fogyasztók esetén - a feszültség és az áramerősség fázisban van egymással Körfrekvencia: ω = π f I eff = 0,7 max I eff = 0,7 I max Induktív fogyasztók esetén - az áramerősség
VÁLTAKOZÓ ÁA JELLEZŐI Ohmos fogyasztók esetén - a feszültség és az áramerősség fázisban van egymással Körfrekvencia: ω = π f I eff = 0,7 max I eff = 0,7 I max Induktív fogyasztók esetén - az áramerősség
DC motor= egyenáramú motor, villanymotor vezérlése micro:bittel:
 + DC motor= egyenáramú motor, villanymotor vezérlése micro:bittel: A motor egyfajta eszköz, amely az elektromágneses indukció szerint a villamos energiát kinetikus energiává alakíthatja át. Sokféle motor
+ DC motor= egyenáramú motor, villanymotor vezérlése micro:bittel: A motor egyfajta eszköz, amely az elektromágneses indukció szerint a villamos energiát kinetikus energiává alakíthatja át. Sokféle motor
4. FEJEZET MOTORHAJTÁSOK
 Tantárgy: TELJESÍTMÉNYELEKTRONIKA Tanár: Dr. Burány Nándor Tanársegéd: Mr. Divéki Szabolcs 5. félév Óraszám: 2+2 1 4. FEJEZET MOTORHAJTÁSOK Széles skála: o W...MW, o precíz pozícionálás...goromba sebességvezérlés.
Tantárgy: TELJESÍTMÉNYELEKTRONIKA Tanár: Dr. Burány Nándor Tanársegéd: Mr. Divéki Szabolcs 5. félév Óraszám: 2+2 1 4. FEJEZET MOTORHAJTÁSOK Széles skála: o W...MW, o precíz pozícionálás...goromba sebességvezérlés.
Az önindukciós és kölcsönös indukciós tényező meghatározása Az Elektrotechnika tárgy 7. sz. laboratóriumi gyakorlatához Mérésvezetői segédlet
 Az önindukciós és kölcsönös indukciós tényező meghatározása Az Elektrotechnika tárgy 7. sz. laboratóriumi gyakorlatához Mérésvezetői segédlet A hallgatói útmutatóban vázolt program a csoport felkészültsége
Az önindukciós és kölcsönös indukciós tényező meghatározása Az Elektrotechnika tárgy 7. sz. laboratóriumi gyakorlatához Mérésvezetői segédlet A hallgatói útmutatóban vázolt program a csoport felkészültsége
ELEKTROTECHNIKA-ELEKTRONIKA ELEKTROTECHNIKA
 ELEKTROTECHNIKA-ELEKTRONIKA ELEKTROTECHNIKA 1. Egyenáramú körök Követelmények, matematikai alapok, prefixumok Töltés, áramerősség Feszültség Ellenállás és vezetés. Vezetők, szigetelők Áramkör fogalma Áramköri
ELEKTROTECHNIKA-ELEKTRONIKA ELEKTROTECHNIKA 1. Egyenáramú körök Követelmények, matematikai alapok, prefixumok Töltés, áramerősség Feszültség Ellenállás és vezetés. Vezetők, szigetelők Áramkör fogalma Áramköri
8. Laboratóriumi gyakorlat INKREMENTÁLIS ADÓ
 8. Laboratóriumi gyakorlat INKREMENTÁLIS ADÓ 1. A gyakorlat célja: Az inkrementális adók működésének megismerése. Számítások és szoftverfejlesztés az inkrementális adók katalógusadatainak feldolgozására
8. Laboratóriumi gyakorlat INKREMENTÁLIS ADÓ 1. A gyakorlat célja: Az inkrementális adók működésének megismerése. Számítások és szoftverfejlesztés az inkrementális adók katalógusadatainak feldolgozására
Háromfázisú aszinkron motorok
 Háromfázisú aszinkron motorok 1. példa Egy háromfázisú, 20 kw teljesítményű, 6 pólusú, 400 V/50 Hz hálózatról üzemeltetett aszinkron motor fordulatszáma 950 1/min. Teljesítmény tényezője 0,88, az állórész
Háromfázisú aszinkron motorok 1. példa Egy háromfázisú, 20 kw teljesítményű, 6 pólusú, 400 V/50 Hz hálózatról üzemeltetett aszinkron motor fordulatszáma 950 1/min. Teljesítmény tényezője 0,88, az állórész
Mérés és adatgyűjtés
 Mérés és adatgyűjtés 4. óra - levelező Mingesz Róbert Szegedi Tudományegyetem 2011. március 18. MA lev - 4. óra Verzió: 1.3 Utolsó frissítés: 2011. május 15. 1/51 Tartalom I 1 A/D konverterek alkalmazása
Mérés és adatgyűjtés 4. óra - levelező Mingesz Róbert Szegedi Tudományegyetem 2011. március 18. MA lev - 4. óra Verzió: 1.3 Utolsó frissítés: 2011. május 15. 1/51 Tartalom I 1 A/D konverterek alkalmazása
ÉPÜLETGÉPÉSZETI ELEKTROMOS ÉS SZABÁLYOZÓ RENDSZEREK
 6203-11 modul ÉPÜLETGÉPÉSZETI ELEKTROMOS ÉS SZABÁLYOZÓ RENDSZEREK I. rész ÉPÜLETGÉPÉSZETI ELEKTROMOS SZERELÉSEK II. RÉSZ VEZÉRLÉS ÉS SZABÁLYOZÁSTECHNIKA TARTALOMJEGYZÉKE Szerkesztette: I. Rész: Tolnai
6203-11 modul ÉPÜLETGÉPÉSZETI ELEKTROMOS ÉS SZABÁLYOZÓ RENDSZEREK I. rész ÉPÜLETGÉPÉSZETI ELEKTROMOS SZERELÉSEK II. RÉSZ VEZÉRLÉS ÉS SZABÁLYOZÁSTECHNIKA TARTALOMJEGYZÉKE Szerkesztette: I. Rész: Tolnai
ÉRTÉKELEMZÉS A GYÁRTMÁNY- ÉS MINSÉGFEJLESZTÉSBEN
 BUDAPESTI MSZAKI FISKOLA BÁNKI DONÁT GÉPÉSZMÉRNÖKI FISKOLAI KAR GÉPGYÁRTÁSTECHNOLÓGIAI TANSZÉK HÁZIFELADAT ÉRTÉKELEMZÉS A GYÁRTMÁNY- ÉS MINSÉGFEJLESZTÉSBEN Készítette: Minségügyi Szakmérnök I.évf. hallgató
BUDAPESTI MSZAKI FISKOLA BÁNKI DONÁT GÉPÉSZMÉRNÖKI FISKOLAI KAR GÉPGYÁRTÁSTECHNOLÓGIAI TANSZÉK HÁZIFELADAT ÉRTÉKELEMZÉS A GYÁRTMÁNY- ÉS MINSÉGFEJLESZTÉSBEN Készítette: Minségügyi Szakmérnök I.évf. hallgató
EGYFÁZISÚ VÁLTAKOZÓ ÁRAM
 VANYSEEŐ KÉPÉS 0 5 EGYFÁSÚ VÁTAKOÓ ÁAM ÖSSEÁÍTOTTA NAGY ÁSÓ MÉNÖKTANÁ - - Tartalomjegyzék Váltakozó áram fogalma és jellemzői...3 Szinuszos lefolyású váltakozó feszültség előállítása...3 A szinuszos lefolyású
VANYSEEŐ KÉPÉS 0 5 EGYFÁSÚ VÁTAKOÓ ÁAM ÖSSEÁÍTOTTA NAGY ÁSÓ MÉNÖKTANÁ - - Tartalomjegyzék Váltakozó áram fogalma és jellemzői...3 Szinuszos lefolyású váltakozó feszültség előállítása...3 A szinuszos lefolyású
MiniStep-4 Léptetőmotor vezérlő
 MiniStep-4 Léptetőmotor vezérlő Hw. verzió: V 1.1 Dátum: 2003 október 31. Doku verzió: V1.1-1 - Leírás. A MiniStep-4 léptetőmotor vezérlő széles körben alkalmazható, általános célra gyártott léptetőmotor
MiniStep-4 Léptetőmotor vezérlő Hw. verzió: V 1.1 Dátum: 2003 október 31. Doku verzió: V1.1-1 - Leírás. A MiniStep-4 léptetőmotor vezérlő széles körben alkalmazható, általános célra gyártott léptetőmotor
Mágneses erőtér. Ahol az áramtól átjárt vezetőre (vagy mágnestűre) erő hat. A villamos forgógépek mutatós műszerek működésének alapja
 erő hat. A villamos forgógépek mutatós műszerek működésének alapja") Mágneses erőtér Ahol az áramtól átjárt vezetőre (vagy mágnestűre) erő hat A villamos forgógépek mutatós műszerek működésének alapja Magnetosztatikai mező: nyugvó állandó mágnesek és egyenáramok időben
Mágneses erőtér Ahol az áramtól átjárt vezetőre (vagy mágnestűre) erő hat A villamos forgógépek mutatós műszerek működésének alapja Magnetosztatikai mező: nyugvó állandó mágnesek és egyenáramok időben
TARTALOMJEGYZÉK. Előszó 9
 TARTALOMJEGYZÉK 3 Előszó 9 1. Villamos alapfogalmak 11 1.1. A villamosság elő for d u lá s a é s je le n t ősége 12 1.1.1. Történeti áttekintés 12 1.1.2. A vil la mos ság tech ni kai, tár sa dal mi ha
TARTALOMJEGYZÉK 3 Előszó 9 1. Villamos alapfogalmak 11 1.1. A villamosság elő for d u lá s a é s je le n t ősége 12 1.1.1. Történeti áttekintés 12 1.1.2. A vil la mos ság tech ni kai, tár sa dal mi ha
A II. kategória Fizika OKTV mérési feladatainak megoldása
 Nyomaték (x 0 Nm) O k t a t á si Hivatal A II. kategória Fizika OKTV mérési feladatainak megoldása./ A mágnes-gyűrűket a feladatban meghatározott sorrendbe és helyre rögzítve az alábbi táblázatban feltüntetett
Nyomaték (x 0 Nm) O k t a t á si Hivatal A II. kategória Fizika OKTV mérési feladatainak megoldása./ A mágnes-gyűrűket a feladatban meghatározott sorrendbe és helyre rögzítve az alábbi táblázatban feltüntetett
DM860A ( ) típusú léptetőmotor meghajtó
 típusú léptetőmotor meghajtó") DM860A (93.034.031) típusú léptetőmotor meghajtó Jellemzők Alacsony motorzaj Alacsony meghajtó és motormelegedés Nagy teljesítmény Tápfeszültség akár 80 VAC, legmagasabb áram akár 7,2 A (RMS 6A) Optikailag
DM860A (93.034.031) típusú léptetőmotor meghajtó Jellemzők Alacsony motorzaj Alacsony meghajtó és motormelegedés Nagy teljesítmény Tápfeszültség akár 80 VAC, legmagasabb áram akár 7,2 A (RMS 6A) Optikailag
Útmutató EDC kézivezérlőhöz
 Útmutató EDC kézivezérlőhöz ALAPFUNKCIÓK A kézivezérlő használata során állítsa az EDC vezérlő előlapján található forgó kapcsolót 0 állásba. Ezáltal a felhasználó a kézivezérlő segítségével férhet hozzá,
Útmutató EDC kézivezérlőhöz ALAPFUNKCIÓK A kézivezérlő használata során állítsa az EDC vezérlő előlapján található forgó kapcsolót 0 állásba. Ezáltal a felhasználó a kézivezérlő segítségével férhet hozzá,
Elektronika Előadás. Analóg és kapcsoló-üzemű tápegységek
 Elektronika 2 7. Előadás Analóg és kapcsoló-üzemű tápegységek Irodalom - Megyeri János: Analóg elektronika, Tankönyvkiadó, 1990 - B. Carter, T.R. Brown: Handbook of Operational Amplifier Applications,
Elektronika 2 7. Előadás Analóg és kapcsoló-üzemű tápegységek Irodalom - Megyeri János: Analóg elektronika, Tankönyvkiadó, 1990 - B. Carter, T.R. Brown: Handbook of Operational Amplifier Applications,
80 mm min. Fűtésvezérlés: Forrasztástechnika Műanyag ipar Galvanazilás Csomagolás Gumi ipar
 W EGY-, KETTŐ ÉS HÁROMFÁZISÚ VEZÉRLÉSŰ FÉLVEZETŐ-KAPCSOLÓK - ÁLTALÁNOS ADATOK FÉLVEZETŐ-KAPCSOLÓK 30 mm min. (LAS1, LAW, LAK 15 A, LAD, LAA 30 A) 80 mm min. 30 mm min. 90 mm széles kapcsoló méretek (LAS2
W EGY-, KETTŐ ÉS HÁROMFÁZISÚ VEZÉRLÉSŰ FÉLVEZETŐ-KAPCSOLÓK - ÁLTALÁNOS ADATOK FÉLVEZETŐ-KAPCSOLÓK 30 mm min. (LAS1, LAW, LAK 15 A, LAD, LAA 30 A) 80 mm min. 30 mm min. 90 mm széles kapcsoló méretek (LAS2
XI. DIGITÁLIS RENDSZEREK FIZIKAI MEGVALÓSÍTÁSÁNAK KÉRDÉSEI Ebben a fejezetben a digitális rendszerek analóg viselkedésével kapcsolatos témákat
 XI. DIGITÁLIS RENDSZEREK FIZIKAI MEGVALÓSÍTÁSÁNAK KÉRDÉSEI Ebben a fejezetben a digitális rendszerek analóg viselkedésével kapcsolatos témákat vesszük sorra. Elsőként arra térünk ki, hogy a logikai értékek
XI. DIGITÁLIS RENDSZEREK FIZIKAI MEGVALÓSÍTÁSÁNAK KÉRDÉSEI Ebben a fejezetben a digitális rendszerek analóg viselkedésével kapcsolatos témákat vesszük sorra. Elsőként arra térünk ki, hogy a logikai értékek
A kommutáció elve. Gyűrűs tekercselésű forgórész. Gyűrűs tekercselésű kommutátoros forgórész
 Egyeáramú gépek 008 É É É + Φp + Φp + Φp - - - D D D A kommutáció elve Gyűrűs tekercselésű forgórész Gyűrűs tekercselésű kommutátoros forgórész 1 Egyeáramú gép forgórésze a) b) A feszültség időbeli változása
Egyeáramú gépek 008 É É É + Φp + Φp + Φp - - - D D D A kommutáció elve Gyűrűs tekercselésű forgórész Gyűrűs tekercselésű kommutátoros forgórész 1 Egyeáramú gép forgórésze a) b) A feszültség időbeli változása
ikerfém kapcsoló Eloadás Iváncsy Tamás termisztor â Közvetett védelem: áramvédelem
 â Közvetlen motorvédelem: hovédelem ikerfém kapcsoló kis teljesítményen: közvetlenül kapcsolja a motort nagy teljesítményen: kivezetéssel muködteti a 3 fázisú kapcsolót Iváncsy Tamás termisztor â Közvetett
â Közvetlen motorvédelem: hovédelem ikerfém kapcsoló kis teljesítményen: közvetlenül kapcsolja a motort nagy teljesítményen: kivezetéssel muködteti a 3 fázisú kapcsolót Iváncsy Tamás termisztor â Közvetett
IRC beüzemelése Mach3-hoz IRC Frekvenciaváltó vezérlő áramkör Inverter Remote Controller
 IRC beüzemelése Mach3-hoz IRC Frekvenciaváltó vezérlő áramkör Inverter Remote Controller A PicoPower család tagja 2012-10-19 A Pico IRC használatával szoftverből állíthatjuk a frekvenciaváltóval vezérelt
IRC beüzemelése Mach3-hoz IRC Frekvenciaváltó vezérlő áramkör Inverter Remote Controller A PicoPower család tagja 2012-10-19 A Pico IRC használatával szoftverből állíthatjuk a frekvenciaváltóval vezérelt
CTX 3 ipari mágneskapcsolók 3P
 CTX 3 ipari mágneskapcsolók 3P 9 és 100 A között 4 160 96 4 161 26 4 161 46 4 161 56 4 161 86 4 161 96 Műszaki jellemzők (60. oldal) Geometriai méretek és koordinációs táblázatok, e-katalógusban Megfelel
CTX 3 ipari mágneskapcsolók 3P 9 és 100 A között 4 160 96 4 161 26 4 161 46 4 161 56 4 161 86 4 161 96 Műszaki jellemzők (60. oldal) Geometriai méretek és koordinációs táblázatok, e-katalógusban Megfelel
1 kérdés. Személyes kezdőlap Villamos Gelencsér Géza Simonyi teszt május 13. szombat Teszt feladatok 2017 Előzetes megtekintés
 Személyes kezdőlap Villamos Gelencsér Géza Simonyi teszt 2017. május 13. szombat Teszt feladatok 2017 Előzetes megtekintés Kezdés ideje 2017. május 9., kedd, 16:54 Állapot Befejezte Befejezés dátuma 2017.
Személyes kezdőlap Villamos Gelencsér Géza Simonyi teszt 2017. május 13. szombat Teszt feladatok 2017 Előzetes megtekintés Kezdés ideje 2017. május 9., kedd, 16:54 Állapot Befejezte Befejezés dátuma 2017.
Gingl Zoltán, Szeged, dec. 1
 Gingl Zoltán, Szeged, 2017. 17 dec. 1 17 dec. 2 Egyenirányító (rectifier) Mint egy szelep deális dióda Nyitó irányban tökéletes vezető (rövidzár) Záró irányban tökéletes szigetelő (szakadás) Valódi dióda:
Gingl Zoltán, Szeged, 2017. 17 dec. 1 17 dec. 2 Egyenirányító (rectifier) Mint egy szelep deális dióda Nyitó irányban tökéletes vezető (rövidzár) Záró irányban tökéletes szigetelő (szakadás) Valódi dióda:
4. /ÁK Adja meg a villamos áramkör passzív építő elemeit!
 Áramkörök 1. /ÁK Adja meg a mértékegységek lehetséges prefixumait (20db)! 2. /ÁK Értelmezze az ideális feszültség generátor fogalmát! 3. /ÁK Mit ért valóságos feszültség generátor alatt? 4. /ÁK Adja meg
Áramkörök 1. /ÁK Adja meg a mértékegységek lehetséges prefixumait (20db)! 2. /ÁK Értelmezze az ideális feszültség generátor fogalmát! 3. /ÁK Mit ért valóságos feszültség generátor alatt? 4. /ÁK Adja meg
ÉRZÉKELŐK ÉS BEAVATKOZÓK II. 2. DC MOTOROK BEVEZETÉS ÉS STATIKUS MODELLEZÉS
 ÉRZÉKELŐK ÉS EVTKOZÓK II. 2. DC MOTOROK EVEZETÉS ÉS STTIKUS MODELLEZÉS Dr. Soumelidis lexandros 2019.02.13. ME KÖZLEKEDÉSMÉRNÖKI ÉS JÁRMŰMÉRNÖKI KR 32708-2/2017/INTFIN SZÁMÚ EMMI ÁLTL TÁMOGTOTT TNNYG Elektromos
ÉRZÉKELŐK ÉS EVTKOZÓK II. 2. DC MOTOROK EVEZETÉS ÉS STTIKUS MODELLEZÉS Dr. Soumelidis lexandros 2019.02.13. ME KÖZLEKEDÉSMÉRNÖKI ÉS JÁRMŰMÉRNÖKI KR 32708-2/2017/INTFIN SZÁMÚ EMMI ÁLTL TÁMOGTOTT TNNYG Elektromos
Egyszabadságfokú mechanikai rendszer irányítása nyílt hurkú vezérlés
 Egyszabadságfokú mechanikai rendszer irányítása nyílt hurkú vezérlés A gyakorlat célja Egyenáramú szervo motorral vezérelt egyszabadságfokú mechanikai rendszer meghajtó áramkörének és a NATIONAL INSTRUMENTS
Egyszabadságfokú mechanikai rendszer irányítása nyílt hurkú vezérlés A gyakorlat célja Egyenáramú szervo motorral vezérelt egyszabadságfokú mechanikai rendszer meghajtó áramkörének és a NATIONAL INSTRUMENTS
SYS700-PLM Power Line Monitor modul DDC rendszerelemek, DIALOG-III család
 DDC rendszerelemek, DIALOG-III család KIVITEL ALKALMAZÁS A az energiaellátás minőségi jellemzőinek mérésére szolgáló szabadon programozható készülék. Épületfelügyeleti rendszerben (BMS), valamint önállóan
DDC rendszerelemek, DIALOG-III család KIVITEL ALKALMAZÁS A az energiaellátás minőségi jellemzőinek mérésére szolgáló szabadon programozható készülék. Épületfelügyeleti rendszerben (BMS), valamint önállóan
EGYENÁRAMÚ GÉP VIZSGÁLATA Laboratóriumi mérési útmutató
 BUDAPESTI MÛSZAKI ÉS GAZDASÁGTUDOMÁNYI EGYETEM VILLAMOSMÉRNÖKI ÉS INFORMATIKAI KAR VILLAMOS ENERGETIKA TANSZÉK Villamos gépek és hajtások csoport EGYENÁRAMÚ GÉP VIZSGÁLATA Laboratóriumi mérési útmutató
BUDAPESTI MÛSZAKI ÉS GAZDASÁGTUDOMÁNYI EGYETEM VILLAMOSMÉRNÖKI ÉS INFORMATIKAI KAR VILLAMOS ENERGETIKA TANSZÉK Villamos gépek és hajtások csoport EGYENÁRAMÚ GÉP VIZSGÁLATA Laboratóriumi mérési útmutató
Hibrid-Kétfázisú-Léptetõmotor MS 026
 Hajtás- Hibrid-Kétfázisú-Léptetõmotor MS 026 Hibrid-Léptetõmotor nagy energiasûrûséggel unipoláris és bipoláris üzeód a 8-vezetékes-csatlakozás segítségével Fordulatszámvezérlés lépésszabályozó frekvenciával
Hajtás- Hibrid-Kétfázisú-Léptetõmotor MS 026 Hibrid-Léptetõmotor nagy energiasûrûséggel unipoláris és bipoláris üzeód a 8-vezetékes-csatlakozás segítségével Fordulatszámvezérlés lépésszabályozó frekvenciával
A legjobb fűtés minden évszakban. DIGITÁLIS SZABÁLYOZÁSÚ ELEKTROMOS KAZÁNOK Fűtéshez és használati melegvíz előállításához.
 A legjobb fűtés minden évszakban DIGITÁLIS SZABÁLYOZÁSÚ ELEKTROMOS KAZÁNOK Fűtéshez és használati melegvíz előállításához 2010 Katalógus Teljes biztonság és maximális kényelem A GABARRÓN elektromos kazánokok
A legjobb fűtés minden évszakban DIGITÁLIS SZABÁLYOZÁSÚ ELEKTROMOS KAZÁNOK Fűtéshez és használati melegvíz előállításához 2010 Katalógus Teljes biztonság és maximális kényelem A GABARRÓN elektromos kazánokok
Villamos gépek. Villamos forgógépek. Forgógépek elvi felépítése
 Villamos forgógépek Forgógépek elvi felépítése A villamos forgógépek két fő része: az álló- és a forgórész. Az állórészen elhelyezett tekercsek árama mágneses teret létesít. Ez a mágneses tér a mozgási
Villamos forgógépek Forgógépek elvi felépítése A villamos forgógépek két fő része: az álló- és a forgórész. Az állórészen elhelyezett tekercsek árama mágneses teret létesít. Ez a mágneses tér a mozgási
Felhasználói kézikönyv. TB67S109AFTG IC-vel szerelt léptetőmotor meghajtóhoz
 Felhasználói kézikönyv TB67S109AFTG IC-vel szerelt léptetőmotor meghajtóhoz Bevezetés A Japán Toshiba 67S109AFTG IC, egy kis teljesítményű léptetőmotor meghajtó. Hobbi célra, vagy olcsóbb berendezések
Felhasználói kézikönyv TB67S109AFTG IC-vel szerelt léptetőmotor meghajtóhoz Bevezetés A Japán Toshiba 67S109AFTG IC, egy kis teljesítményű léptetőmotor meghajtó. Hobbi célra, vagy olcsóbb berendezések
Gépészmérnöki alapszak, Mérnöki fizika 2. ZH, december 05. Feladatok (maximum 3x6 pont=18 pont)
") 1. 2. 3. Mondat E1 E2 NÉV: Gépészmérnöki alapszak, Mérnöki fizika 2. ZH, 2017. december 05. Neptun kód: Aláírás: g=10 m/s 2 ; ε 0 = 8.85 10 12 F/m; μ 0 = 4π 10 7 Vs/Am; c = 3 10 8 m/s Előadó: Márkus /
1. 2. 3. Mondat E1 E2 NÉV: Gépészmérnöki alapszak, Mérnöki fizika 2. ZH, 2017. december 05. Neptun kód: Aláírás: g=10 m/s 2 ; ε 0 = 8.85 10 12 F/m; μ 0 = 4π 10 7 Vs/Am; c = 3 10 8 m/s Előadó: Márkus /
4. /ÁK Adja meg a villamos áramkör passzív építő elemeit!
 Áramkörök 1. /ÁK Adja meg a mértékegységek lehetséges prefixumait (20db)! 2. /ÁK Értelmezze az ideális feszültség generátor fogalmát! 3. /ÁK Mit ért valóságos feszültség generátor alatt? 4. /ÁK Adja meg
Áramkörök 1. /ÁK Adja meg a mértékegységek lehetséges prefixumait (20db)! 2. /ÁK Értelmezze az ideális feszültség generátor fogalmát! 3. /ÁK Mit ért valóságos feszültség generátor alatt? 4. /ÁK Adja meg
+ Egyszeres muködésu szögletes henger: +Tömlohenger: (17. ábra) Jellemzok
 Jellemzok") 19 +Tömlohenger: (17. ábra) Jellemzok - kis beépítési méret - elvi lökethossz 80%-a'ha,sználható, külso lökethossz-határoló szükséges - szöget bezáró felilletek,között is használható - ero a lökethossz
19 +Tömlohenger: (17. ábra) Jellemzok - kis beépítési méret - elvi lökethossz 80%-a'ha,sználható, külso lökethossz-határoló szükséges - szöget bezáró felilletek,között is használható - ero a lökethossz
Teljesítményelektronika szabályozása. Összeállította dr. Blága Csaba egyetemi docens
 Teljesítményelektronika szabályozása Összeállította dr. Blága Csaba egyetemi docens Szakirodalom 1. Ferenczi Ödön, Teljesítményszabályozó áramkörök, Műszaki Könyvkiadó, Budapest, 1981. 2. Ipsits Imre,
Teljesítményelektronika szabályozása Összeállította dr. Blága Csaba egyetemi docens Szakirodalom 1. Ferenczi Ödön, Teljesítményszabályozó áramkörök, Műszaki Könyvkiadó, Budapest, 1981. 2. Ipsits Imre,
feszültség konstans áram konstans
 Szélessávú Hírközlés és Villamosságtan Tanszék Űrtechnológia laboratórium Szabó József Egyszerű feszültség és áramszabályozó Űrtechnológia a gyakorlatban Budapest, 2014. április 10. Űrtetechnológia a gyakorlatban
Szélessávú Hírközlés és Villamosságtan Tanszék Űrtechnológia laboratórium Szabó József Egyszerű feszültség és áramszabályozó Űrtechnológia a gyakorlatban Budapest, 2014. április 10. Űrtetechnológia a gyakorlatban
Multi-20 modul. Felhasználói dokumentáció 1.1. Készítette: Parrag László. Jóváhagyta: Rubin Informatikai Zrt.
 Multi-20 modul Felhasználói dokumentáció. Készítette: Parrag László Jóváhagyta: Rubin Informatikai Zrt. 49 Budapest, Egressy út 7-2. telefon: +36 469 4020; fax: +36 469 4029 e-mail: info@rubin.hu; web:
Multi-20 modul Felhasználói dokumentáció. Készítette: Parrag László Jóváhagyta: Rubin Informatikai Zrt. 49 Budapest, Egressy út 7-2. telefon: +36 469 4020; fax: +36 469 4029 e-mail: info@rubin.hu; web:
= f p képlet szerint. A gép csak ezen a szögsebességen tud állandósult nyomatékot kifejteni.
 44 SZINKRON GÉPEK. Szögsebességük az állórész f 1 frekvenciájához mereven kötődik az ω 2 π = f p képlet szerint. A gép csak ezen a szögsebességen tud állandósult nyomatékot kifejteni. Az állórész felépítése
44 SZINKRON GÉPEK. Szögsebességük az állórész f 1 frekvenciájához mereven kötődik az ω 2 π = f p képlet szerint. A gép csak ezen a szögsebességen tud állandósult nyomatékot kifejteni. Az állórész felépítése
Mechatronika, Optika és Gépészeti Informatika Tanszék MOTOR - BOARD
 echatronika, Optika és Gépészeti Informatika Tanszék OTOR - BORD I. Elméleti alapok a felkészüléshez 1. vizsgált berendezés mérést a HPS System Technik (www.hps-systemtechnik.com) rendszereszközök segítségével
echatronika, Optika és Gépészeti Informatika Tanszék OTOR - BORD I. Elméleti alapok a felkészüléshez 1. vizsgált berendezés mérést a HPS System Technik (www.hps-systemtechnik.com) rendszereszközök segítségével
1. Irányítástechnika. Készítette: Fecser Nikolett. 2. Ipari elektronika. Készítette: Horváth Lászó
 A mechatronikai technikus képzés átvilágítására és fejlesztésére irányuló projekt eredményeképp az egyes tantárgyakhoz új, disszeminációra alakalmas tanmeneteket dolgoztunk ki. 1. Irányítástechnika. Készítette:
A mechatronikai technikus képzés átvilágítására és fejlesztésére irányuló projekt eredményeképp az egyes tantárgyakhoz új, disszeminációra alakalmas tanmeneteket dolgoztunk ki. 1. Irányítástechnika. Készítette:
Analóg-digitális átalakítás. Rencz Márta/ Ress S. Elektronikus Eszközök Tanszék
 Analóg-digitális átalakítás Rencz Márta/ Ress S. Elektronikus Eszközök Tanszék Mai témák Mintavételezés A/D átalakítók típusok D/A átalakítás 12/10/2007 2/17 A/D ill. D/A átalakítók A világ analóg, a jelfeldolgozás
Analóg-digitális átalakítás Rencz Márta/ Ress S. Elektronikus Eszközök Tanszék Mai témák Mintavételezés A/D átalakítók típusok D/A átalakítás 12/10/2007 2/17 A/D ill. D/A átalakítók A világ analóg, a jelfeldolgozás
80 mm min. Fűtésvezérlés: Forrasztástechnika Műanyag ipar Galvanazilás Csomagolás Gumi ipar
 W EGY-, KETTŐ ÉS HÁROMFÁZISÚ VEZÉRLÉSŰ FÉLVEZETŐ-KAPCSOLÓK - ÁLTALÁNOS ADATOK FÉLVEZETŐ-KAPCSOLÓK 30 mm min. 45 mm széles kapcsoló méretek (LAS1, LAW, LAK 15 A, LAD, LAA 30 A) 80 mm min. 30 mm min. 90
W EGY-, KETTŐ ÉS HÁROMFÁZISÚ VEZÉRLÉSŰ FÉLVEZETŐ-KAPCSOLÓK - ÁLTALÁNOS ADATOK FÉLVEZETŐ-KAPCSOLÓK 30 mm min. 45 mm széles kapcsoló méretek (LAS1, LAW, LAK 15 A, LAD, LAA 30 A) 80 mm min. 30 mm min. 90
Hármas tápegység Matrix MPS-3005L-3
 Hármas tápegység Matrix MPS-3005L-3 Általános leírás Az MPS-3005L-3 tápegység egy fix 5V-os, 3A-rel terhelhető és két 0V-30V-között változtatható,legfeljebb 5A-rel terhelhető kimenettel rendelkezik. A
Hármas tápegység Matrix MPS-3005L-3 Általános leírás Az MPS-3005L-3 tápegység egy fix 5V-os, 3A-rel terhelhető és két 0V-30V-között változtatható,legfeljebb 5A-rel terhelhető kimenettel rendelkezik. A
Hajtástechnika. Villanymotorok. Egyenáramú motorok. Váltóáramú motorok
 Hajtástechnika Villanymotorok Egyenáramú motorok Váltóáramú motorok Soros gerjesztésű Párhuzamos gerjesztésű Külső gerjesztésű Vegyes gerjesztésű Állandó mágneses gerjesztésű Aszinkron motorok Szinkron
Hajtástechnika Villanymotorok Egyenáramú motorok Váltóáramú motorok Soros gerjesztésű Párhuzamos gerjesztésű Külső gerjesztésű Vegyes gerjesztésű Állandó mágneses gerjesztésű Aszinkron motorok Szinkron
Lineáris és kapcsoló üzemű feszültség növelő és csökkentő áramkörök
 Lineáris és kapcsoló üzemű feszültség növelő és csökkentő áramkörök Buck, boost konverter Készítette: Támcsu Péter, 2016.10.09, Debrecen Felhasznált dokumentum : Losonczi Lajos - Analog Áramkörök 7 Feszültség
Lineáris és kapcsoló üzemű feszültség növelő és csökkentő áramkörök Buck, boost konverter Készítette: Támcsu Péter, 2016.10.09, Debrecen Felhasznált dokumentum : Losonczi Lajos - Analog Áramkörök 7 Feszültség
M Ű S Z A K I A D A T O K
 Glydea TM Motoros karnis M Ű S Z A K I A D A T O K Glydea Műszaki adatok Glydea Műszaki adatok GLYDEA TM 35 GLYDEA TM 60e Mechanikus paraméterek Névleges nyomaték Maximális nyomaték Névleges motor sebesség
Glydea TM Motoros karnis M Ű S Z A K I A D A T O K Glydea Műszaki adatok Glydea Műszaki adatok GLYDEA TM 35 GLYDEA TM 60e Mechanikus paraméterek Névleges nyomaték Maximális nyomaték Névleges motor sebesség
Mechatronika alapjai órai jegyzet
 - 1969-ben alakult ki a szó - Rendszerek és folyamatok, rendszertechnika - Automatika, szabályozás - számítástechnika Cd olvasó: Dia Mechatronika alapjai órai jegyzet Minden mechatronikai rendszer alapstruktúrája
- 1969-ben alakult ki a szó - Rendszerek és folyamatok, rendszertechnika - Automatika, szabályozás - számítástechnika Cd olvasó: Dia Mechatronika alapjai órai jegyzet Minden mechatronikai rendszer alapstruktúrája
Az elektromágneses tér energiája
 Az elektromágneses tér energiája Az elektromos tér energiasűrűsége korábbról: Hasonlóképpen, a mágneses tér energiája: A tér egy adott pontjában az elektromos és mágneses terek együttes energiasűrűsége
Az elektromágneses tér energiája Az elektromos tér energiasűrűsége korábbról: Hasonlóképpen, a mágneses tér energiája: A tér egy adott pontjában az elektromos és mágneses terek együttes energiasűrűsége
Elektromechanika. 4. mérés. Háromfázisú aszinkron motor vizsgálata. 1. Rajzolja fel és értelmezze az aszinkron gép helyettesítő kapcsolási vázlatát.
 Elektromechanika 4. mérés Háromfázisú aszinkron motor vizsgálata 1. Rajzolja fel és értelmezze az aszinkron gép helyettesítő kapcsolási vázlatát. U 1 az állórész fázisfeszültségének vektora; I 1 az állórész
Elektromechanika 4. mérés Háromfázisú aszinkron motor vizsgálata 1. Rajzolja fel és értelmezze az aszinkron gép helyettesítő kapcsolási vázlatát. U 1 az állórész fázisfeszültségének vektora; I 1 az állórész
1. Egy lineáris hálózatot mikor nevezhetünk rezisztív hálózatnak és mikor dinamikus hálózatnak?
 Ellenörző kérdések: 1. előadás 1/5 1. előadás 1. Egy lineáris hálózatot mikor nevezhetünk rezisztív hálózatnak és mikor dinamikus hálózatnak? 2. Mit jelent a föld csomópont, egy áramkörben hány lehet belőle,
Ellenörző kérdések: 1. előadás 1/5 1. előadás 1. Egy lineáris hálózatot mikor nevezhetünk rezisztív hálózatnak és mikor dinamikus hálózatnak? 2. Mit jelent a föld csomópont, egy áramkörben hány lehet belőle,
Forgójeladók (kép - Heidenhain)
") Forgójeladók A forgójeladók választékában számos gyártó különböző szempontoknak megfelelő terméke megtalálható, ezért a felhasználónak a megfelelő típus kiválasztása néha nem kis nehézséget okoz. Ezen
Forgójeladók A forgójeladók választékában számos gyártó különböző szempontoknak megfelelő terméke megtalálható, ezért a felhasználónak a megfelelő típus kiválasztása néha nem kis nehézséget okoz. Ezen
5. Hét Sorrendi hálózatok
 5. Hét Sorrendi hálózatok Digitális technika 2015/2016 Bevezető példák Példa 1: Italautomata Legyen az általunk vizsgált rendszer egy italautomata, amelyről az alábbi dolgokat tudjuk: 150 Ft egy üdítő
5. Hét Sorrendi hálózatok Digitális technika 2015/2016 Bevezető példák Példa 1: Italautomata Legyen az általunk vizsgált rendszer egy italautomata, amelyről az alábbi dolgokat tudjuk: 150 Ft egy üdítő
Elektrotechnika 9. évfolyam
 Elektrotechnika 9. évfolyam Villamos áramkörök A villamos áramkör. A villamos áramkör részei. Ideális feszültségforrás. Fogyasztó. Vezeték. Villamos ellenállás. Ohm törvénye. Részfeszültségek és feszültségesés.
Elektrotechnika 9. évfolyam Villamos áramkörök A villamos áramkör. A villamos áramkör részei. Ideális feszültségforrás. Fogyasztó. Vezeték. Villamos ellenállás. Ohm törvénye. Részfeszültségek és feszültségesés.
Elektrotechnika 11/C Villamos áramkör Passzív és aktív hálózatok
 Elektrotechnika 11/C Villamos áramkör A villamos áramkör. A villamos áramkör részei. Ideális feszültségforrás. Fogyasztó. Vezeték. Villamos ellenállás. Ohm törvénye. Részfeszültségek és feszültségesés.
Elektrotechnika 11/C Villamos áramkör A villamos áramkör. A villamos áramkör részei. Ideális feszültségforrás. Fogyasztó. Vezeték. Villamos ellenállás. Ohm törvénye. Részfeszültségek és feszültségesés.
Programozható vezérlő rendszerek. Elektromágneses kompatibilitás II.
 Elektromágneses kompatibilitás II. EMC érintkező védelem - az érintkezők nyitása és zárása során ún. átívelések jönnek létre - ezek csökkentik az érintkezők élettartamát - és nagyfrekvenciás EM sugárzások
Elektromágneses kompatibilitás II. EMC érintkező védelem - az érintkezők nyitása és zárása során ún. átívelések jönnek létre - ezek csökkentik az érintkezők élettartamát - és nagyfrekvenciás EM sugárzások
ÜZLETKÖTŐI ÉRTEKEZLET 2012-01-13 DUNAKESZI
 ÜZLETKÖTŐI ÉRTEKEZLET 2012-01-13 DUNAKESZI ÉS MOTORVÉDŐ KAPCSOLÓK KONTAKTOROK Kontaktor definíció: Olyan gyakori működésre alkalmas elektromágneses elven működtetett mechanikus kapcsolókészülék,
ÜZLETKÖTŐI ÉRTEKEZLET 2012-01-13 DUNAKESZI ÉS MOTORVÉDŐ KAPCSOLÓK KONTAKTOROK Kontaktor definíció: Olyan gyakori működésre alkalmas elektromágneses elven működtetett mechanikus kapcsolókészülék,
Gingl Zoltán, Szeged, :44 Elektronika - Diódák, tranzisztorok
 Gingl Zoltán, Szeged, 2016. 2016. 12. 13. 7:44 Elektronika - Diódák, tranzisztorok 1 2016. 12. 13. 7:44 Elektronika - Diódák, tranzisztorok 2 Egyenirányító (rectifier) Mint egy szelep deális dióda Nyitó
Gingl Zoltán, Szeged, 2016. 2016. 12. 13. 7:44 Elektronika - Diódák, tranzisztorok 1 2016. 12. 13. 7:44 Elektronika - Diódák, tranzisztorok 2 Egyenirányító (rectifier) Mint egy szelep deális dióda Nyitó
A 18142 típusú tápegység felhasználható minden olyan esetben, ahol 0-30V egyenfeszültségre van szükség maximálisan 2,5 A terhelıáram mellett.
 Analóg DC tápegységek: 18141 típ. DC tápegység, 30V/1,2A Kijelzı: 1 db mőszer A 18141 típusú tápegység elektronikus készülékek tápfeszültség ellátására alkalmas, de felhasználható minden olyan esetben,
Analóg DC tápegységek: 18141 típ. DC tápegység, 30V/1,2A Kijelzı: 1 db mőszer A 18141 típusú tápegység elektronikus készülékek tápfeszültség ellátására alkalmas, de felhasználható minden olyan esetben,
ELKON S-304 autó villamossági mőszer áramköri leírása
 ELKON S-304 autó villamossági mőszer áramköri leírása 7.1 Tápegység A mérımőszer tápegysége a T 105, T 106 tranzisztorokból, a D 111, 115 diódákból, a C 131, 132 kondenzátorokból és az R 145 ellenállásokból
ELKON S-304 autó villamossági mőszer áramköri leírása 7.1 Tápegység A mérımőszer tápegysége a T 105, T 106 tranzisztorokból, a D 111, 115 diódákból, a C 131, 132 kondenzátorokból és az R 145 ellenállásokból
Léptetőmotor vezérlő
 MiniStep-5 Léptetőmotor vezérlő Hw. verzió: V 1.2 Dátum: 2006 február 3. Doku verzió: V1.4-1 - Leírás. A MiniStep-5 léptetőmotor vezérlő széles körben alkalmazható, általános célra gyártott léptetőmotor
MiniStep-5 Léptetőmotor vezérlő Hw. verzió: V 1.2 Dátum: 2006 február 3. Doku verzió: V1.4-1 - Leírás. A MiniStep-5 léptetőmotor vezérlő széles körben alkalmazható, általános célra gyártott léptetőmotor
Gyakorlat 30B-14. a F L = e E + ( e)v B képlet, a gravitációs erőt a (2.1) G = m e g (2.2)
v B képlet, a gravitációs erőt a (2.1) G = m e g (2.2)") 2. Gyakorlat 30B-14 Az Egyenlítőnél, a földfelszín közelében a mágneses fluxussűrűség iránya északi, nagysága kb. 50µ T,az elektromos térerősség iránya lefelé mutat, nagysága; kb. 100 N/C. Számítsuk ki,
2. Gyakorlat 30B-14 Az Egyenlítőnél, a földfelszín közelében a mágneses fluxussűrűség iránya északi, nagysága kb. 50µ T,az elektromos térerősség iránya lefelé mutat, nagysága; kb. 100 N/C. Számítsuk ki,
Fordulatszám szabályozott egyenáramú szervohajtás vizsgálata
 2011.03.24. Fordulatszám szabályozott egyenáramú szervohajtás vizsgálata BMEVIVEM264 Dr. Számel László Budapesti Műszaki és Gazdaságtudományi Egyetem Villamos Energetika Tanszék Készült a Társadalmi Megújulás
2011.03.24. Fordulatszám szabályozott egyenáramú szervohajtás vizsgálata BMEVIVEM264 Dr. Számel László Budapesti Műszaki és Gazdaságtudományi Egyetem Villamos Energetika Tanszék Készült a Társadalmi Megújulás
Minden mérésre vonatkozó minimumkérdések
 Minden mérésre vonatkozó minimumkérdések 1) Definiálja a rendszeres hibát 2) Definiálja a véletlen hibát 3) Definiálja az abszolút hibát 4) Definiálja a relatív hibát 5) Hogyan lehet az abszolút-, és a
Minden mérésre vonatkozó minimumkérdések 1) Definiálja a rendszeres hibát 2) Definiálja a véletlen hibát 3) Definiálja az abszolút hibát 4) Definiálja a relatív hibát 5) Hogyan lehet az abszolút-, és a
VILLANYSZERELŐ KÉPZÉS MÁGNESES TÉR ÖSSZEÁLLÍTOTTA NAGY LÁSZLÓ MÉRNÖKTANÁR
 VIANYSZEREŐ KÉPZÉS 2 0 5 MÁGNESES TÉR ÖSSZEÁÍTOTTA NAGY ÁSZÓ MÉRNÖKTANÁR - 2 - Tartalomjegyzék Mágneses tér fogalma, jellemzői...3 A mágneses tér hatása az anyagokra...4 Elektromágneses indukció...6 Mozgási
VIANYSZEREŐ KÉPZÉS 2 0 5 MÁGNESES TÉR ÖSSZEÁÍTOTTA NAGY ÁSZÓ MÉRNÖKTANÁR - 2 - Tartalomjegyzék Mágneses tér fogalma, jellemzői...3 A mágneses tér hatása az anyagokra...4 Elektromágneses indukció...6 Mozgási