ARM Cortex-M0+ mikrovezérlő programozása KEIL MDK 5 környezetben. 9. Az I2C kommunikációs csatorna
|
|
|
- Árpád Orsós
- 7 évvel ezelőtt
- Látták:
Átírás

1 ARM Cortex-M0+ mikrovezérlő programozása KEIL MDK 5 környezetben 9. Az I2C kommunikációs csatorna 1
2 Felhasznált anyagok, ajánlott irodalom Joseph Yiu: The Definitive Guide to ARM Cortex -M0 and Cortex-M0+ Processors (2nd Ed.) Muhammad Ali Mazidi, Shujen Chen, Sarmad Naimi, Sepehr Naimi: Freescale ARM Cortex-M Embedded Programming ARM University Program: Course/Lab Material for Teaching Embedded Systems/MCUs (for the FRDM-KL25Z board) ARM Information Center: Cortex-M0+ Devices Generic User Guide Freescale: MKL25Z128VLK4 MCU datasheet Freescale: KL25 Sub-Family Reference Manual Freescale: FRDM-KL25Z User Manual Freescale: FRDM-KL25Z Pinouts 2
3 Az I2C busz Inter-Integrated Circuit busz vagy kétvezetékes busz, amelyet eredetileg a Philips cég dolgozott ki 1982-ben. Több eszköz (master és slave) fűzhető fel a buszra A buszt a mester (master) eszközök vezérlik és kezdeményezik az adatforgalmat. A szolga (slave) eszköz akkor válaszol, ha címzéssel megszólítják Az I 2 C busz két jelvezetéket használ SCL: szinkronizáló órajel SDA: soros adat A részletes leírás az Az I 2 C-busz specifikációja és használata című dokumentumban olvasható 3
4 Az I2C busz vezérlése A jelvezetékeket ellenállások húzzák fel tápfeszültségre V DD Nyitott nyelőelektródás FET-ek húzzák le a vonalakat alacsony szintre A buszt vezérlő mester eszköz állítja elő az SCL órajelet normál mód: 100 khz gyors mód: 400 khz nagysebességű mód: 1 MHz, vagy több, ez esetben már aktív felhúzással. 4
5 I2C üzenetformátum Üzenet-orientált adatátvitel négy felvonásban: 1. Start feltétel 2. A szolga eszköz megcímzése 7-bites cím Parancsbit (1: olvasás, 0: írás) Nyugtázás (a vevő visszajelzése) 3. Adatmező Adatbájt Nyugtázás (a vevő visszajelzése) 4. Stop feltétel Nyugtázás (ACK): a 9. órajel impulzus tartamára a vevő alacsony szinten tartja az SDA jelvezetéket. Negatív nyugtázás (NAK): a 9. órajel impulzus idején senki sem húzza le az SDA jelvezetéket az magas szinten marad. 5
6 10-bites címzés az I2C buszon A 10-bites címzés az eredetileg 7-bites címzést használó I2C protokoll bővítése. A 10 bites címet csak két részletben tudjuk kiküldeni. Az első rész egy speciális bitsorozattal (11110) kezdődik. Ez a bitkombináció a 10 bites címzés számára fenntartott, tehát 7 bites címzésnél ez a bitsorozat nem használható eszközcímként. Az első rész kiküldése után minen 10-bites címzést használó eszköz küld nyugtázást. A második bájtban a cím többi bitjeit (A0 A7) küldjük ki. Erre már csak az az eszköz válaszol, amelynek mind a 10 címbitje megegyezik az általunk kiküldöttekkel. Az adatküldés a továbbiakban ugyanúgy folyik tovább, mint a 7-bites címzésnél. 6
7 Órajel szinkronizálás Minden master a saját órajelét generálja az SCL vezetéken ahhoz, hogy üzenetet vigyen át az I²C-buszon. Az órajelszinkronizáció az I²C interfészek huzalozott ÉS kapcsolatával megy végbe (a vezetéken csak akkor lesz magas szint, ha minden eszköz magas szintre vált). Az SCL vezetéken egy magas-alacsony átmenet az érintett eszközöknél az alacsony periódusuk időzítésének megkezdését eredményezi. Ha egy eszköz órajele alacsonyra váltott egészen addig alacsony állapotban tartja az SCL vezetéket, amíg az órajele magas periódusához nem ér. Az SCL vezetéket a leghosszabb alacsony periódusú eszköz tartja alacsonyan. Erre az időre a rövidebb alacsony periódussal rendelkező eszközök magas szintre várakozó állapotba kerülnek. 7
8 Arbitráció Multi-master környezetben csak akkor kezdhetünk átvitelt, ha a busz szabad. Két, vagy több master generálhat egy start feltételt a START feltétel minimális tartási idején belül. Amig az SCL vezeték magas szinten van az SDA vezetéken végbemegy az arbitráció. Az a master veszít, amelyik magas szintet küld, miközben egy másik master alacsonyat. A vesztes master lekapcsolja az adatkimeneti fokozatát, mert a busz jelszintje nem egyezik meg a saját jelszintjével. Az arbitráció több biten keresztül folytatódhat. MASTER1 MASTER2 BUSZVONALAK 8
9 Órajel megnyújtása Az órajelet a mester generálja, de előfordulhat, hogy egy slave eszköz nem képes együttműködni a master által diktált tempóval, s időt kér. A már említett órajelszinkronizációs mechanizmus használható fel erre. Ez azt jelenti, hogy egy eszköz képes lehet az adatbájtok gyors fogadására, de a fogadott byte eltárolására vagy egy másik byte átvitelhez való előkészítéséhez több időre van szüksége. A slave ilyenkor a fogadás és a nyugtázás után alacsony szinten tarthatja az SCL vezetéket, hogy a mastert várakozási állapotba kényszerítse, amíg a slave kész nem lesz a következő bájt átvitelére, mint egy kézfogásos típusú eljárásban. Nomál és gyors (fast) módban az adatátvitel bármelyik fázisában megnyújthatja a slave az órajelet. Nagysebességű (high-speed) módban azonban, ahol az órajelek fehúzásában aktív elemek is részt vesznek, csak a nyugtázó bit után és az azt követő adatbit előtt megengedett az SCL vonal lehúzása. 9
10 Ismételt START feltétel Gyakran szükség van arra, hogy egy összetett tranzakciót egy master egy menetben végigvihessen. Ilyen eset lehet például egy eszköz valamely regiszterének vagy memóriaterületének megcímzése, majd onnan adatok beolvasása. Ha az adatküldés és adatfogadás között nem generálunk STOP feltételt, akkor a master magánál tudja tartani a busz feletti vezérlést. A STOP nélkül generált újabb START feltételt ismételt START-nak (repeated START) nevezzük. Az ismételt START feltételt újabb cím/parancs bájt küldése kell, hogy kövesse. 10
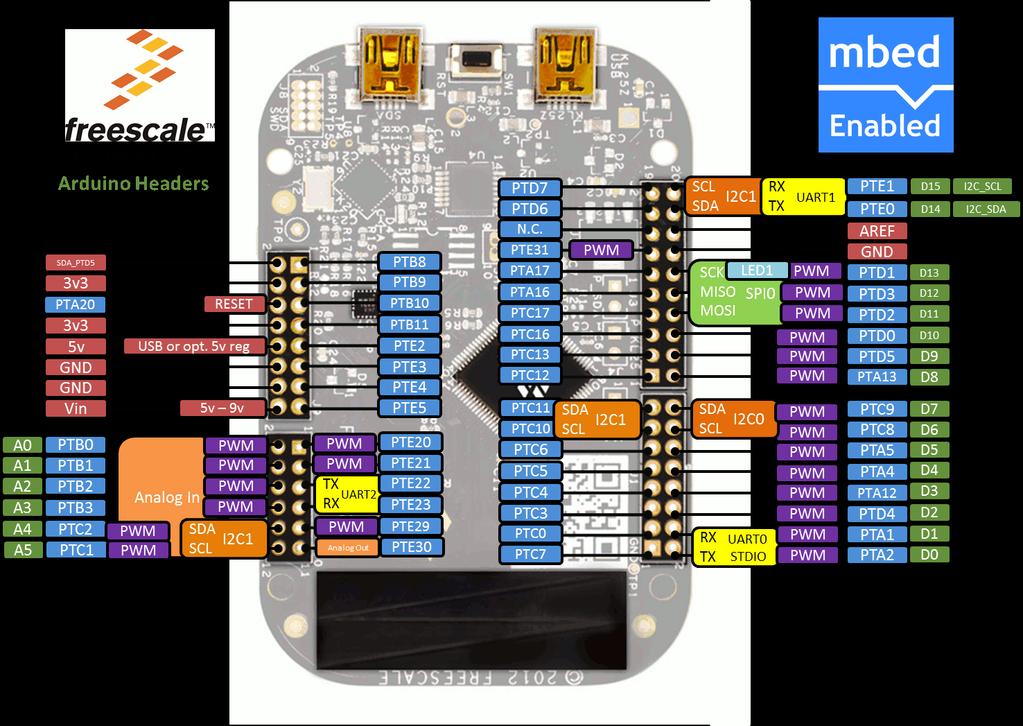
11 A FRDM-KL25Z kártya I2C perifériái Az MKL25Z128VLK4 mikrovezérlő két I2C modult tartalmaz (I2C1 és I2C2) amelyek az alábbi tulajdonságokkal rendelkeznek: Multimaster környezetben is használhatók Az adatsebesség szoftveresen beállítható (64 fokozat választható) Szoftveresen választható nyugtázó bit küldés Programmegszakításos adatküldés/fogadás Arbitráció elvesztése esetén programmegszakítás és automatikus átváltás master módból slave módba Hívási cím egyezésekor programmegszakítás START és STOP feltétel generálás, illetve felismerés Ismételt START feltétel generálás, illetve felismerés Nyugtázó jel küldése, illetve felismerése Busz foglaltságának felismerése Általános hívás felismerése 10-bites kiterjesztett címzés lehetősége Kompatibilis a System Management Bus (SMBus) v2 specifikációjával Programozható bemeneti zavarszűrés Kisfogyasztású módból ébresztés slave címegyezés detektálásakor Slave címtartomány korlátozás támogatása DMA adatátvitel támogatása 11
12 A kivezetések konfigurálása A konfigurálás egyik fontos eleme, hogy kivezetéseket rendelünk az adott perifériához. Az alábbi táblázatban összefoglaltuk az I2C modulokhoz rendelhető kivezetéseket. Zárójelben a megfeleló portvezérlő regiszter MUX bitcsoportjába írandó módválasztó kódot is megadtuk. Itt jegyezzük meg, hogy a Mazidi könyv 9-8. táblázatában óriási a kavarodás, hibás adatok szerepelnek benne! I2C modul I2Cx_SDA I2Cx_SDA I2C0 PTE25(5), PTB1(2), PTB3(2), PTC9(2) PTE24(5), PTB0(2), PTB2(2), PTC8(2) I2C1 PTE0(6), PTA4(2), PTC2(2), PTC11(2) PTE1(6), PTC1(2), PTC10(2) Megjegyzések: Az Arduino kompatibilis bekötéshez a vastagon szedett kivezetések tartoznak: I2C1_SDA=PTE0, I2C1_SCL=PTE1. A másik Arduino kompatibilis kivezetés, az A4 (SDA) és A5 (SCL) analóg bemenetek használata, PTC2, PTC1 kivezetéspárnak felel meg. A PTE25, PTE24 kivezetéspár csak a FRDM-KL25Z kártyára szerelt MMA8451Q gyorsulásmérő IC számára elérhető, a csatlakozókra nincsenek kivezetve. Az I2C1_SCL jel elvileg a PTA3 kivezetéshez is hozzárendelhető lenne, de ez hardverütközéshez vezetne, mivel a PTA3 láb egyúttal a programozó és nyomkövető SWDIO kivezetése, s a kártyára épített Open_SDA hibavadász eszközhöz csatlakozik.. 12

13 Az I2C modulok engedélyezése Az I2C modulok működését a többi soros perifériához hasonlóan a Rendszer-Integrációs Modul SIM_SCGC4 regiszterében lehet engedélyezni, a megfelelő bit '1'-be állításával. Például: SIM->SCGC4 = 0x40; SIM->SCGC4 = 0x80; // I2C0 engedélyezése // I2C1 engedélyezése 13

14 Az I2C modulok regiszterkészlete Az I2Cx modulok azonos regiszterkészlettel rendelkeznek. Az I2C0 modul báziscíme 0x4006_6000, az I2C1 modulé 0x Az alábbi táblázatban a báziscímekhez viszonyított eltolási címét (ofszet cím) adtuk meg. 14
15 Az adatsebesség beállítása Az I2C kommunikáció adatátviteli sebességét a master határozza meg (az SCL órajelet a master állítja elő). Az MKL25Z128VLK4 mikrovezérlő I2C moduljai órajelének forrása a buszfrekvencia, amelyből leosztással állíthatjuk elő a kívánt frekvenciájú SCL órajelet. A leosztási arányt az I2Cx_F regiszterben adhatjuk meg, egy előosztási és egy osztási arány kiválasztásával, az alábbi képlet szerint: I2C baud rate = f bus / (2 MULT * SCL osztó) I2Cx_F: Frequencia osztó regiszter MULT: ez a bitcsoport az előosztási arányt szabja meg (00: 1/1, 01: 1/2, 10: /1/4, 11: fenntartott kód) ICR: leosztási arány Az SCL osztó és az ICR bitcsort értéke közötti (bonyolult) összefüggést a következő oldalon egy táblázatban mutatatjuk meg. 15

16 Példa: 24 MHz-es buszfrekvencia esetén a 400 khz-es I2C bitráta beállításához 60-szoros leosztás kell. Ez a fenti táblázat alapján MULT = 1 és SCR = 0x05 értékekkel, végeredményben tehát az I2Cx_F = 0x45; értékadással állítható be. 16
17 I2Cx_C1 vezérlő regiszter Az I2Cx_C1 vezérlő regiszter központi szerepet játszik az I2C modul kezelésében, hiszen ebben tilthatjuk le, vagy engedélyezhetjük a modul működését, választhatjuk ki a master/slave módot, illetve állíthatjuk be az adatáramlás irányát (adatküldés vagy -fogadás). Az egyes bitek szerepe: IICEN - Az I2C modul engedélyezése (0: letiltás, 1: engedélyezés) IICIE - Az I2C modul megszakításainak engedélyezése (0: tiltás, 1: engedélyezés) MST - Master mód kiválasztása (0: slave mód, 1: master mód). A 0 1 átmenet automatikusan Start feltételt, a 1 0 átmenet pedig Stop feltételt generál. TX - Adatküldés mód választás (0: adatfogadás mód, 1: adatküldés mód) TXAK - Nyugtázó bit választása (0: ACK pozitív nyugtázás küldése, 1: NAK negatív nyugtásá küldése) RSTA - Újraindítás (ismételt START) küldése (1: írása új START feltételt indít) WUEN - Felébresztés engedélyezése energiatakarékos módban (0: tiltás, 1: engedélyezés) DMAEN - DMA adatátvitel engedélyezése (0: tiltás, 1: engedélyezés) 17
18 Az I2Cx_A1 címregiszter Slave módban ez a regiszter tartalmazza a 7-bites címzéshez az eszköz címét (10-bites címzéshez a kiegészítő címbiteket az I2Cx_C2 regiszter alsó három bitje tartalmazza). Az I2Cx_D adatregiszter 8-bites adatregiszter Mester adatküldés módban: Az I2Cx_D regiszterbe írás elindítja az adatküldést Mester adatfogadás módban Az I2Cx_D regiszter olvasása elindítja a következő adatbájt vételét 18
19 Az I2Cx_S állapotjelző regiszter Az I2Cx_S állapotjelző regiszter bitjei az I2C modul, mint állapotgép pillanatnyi állapotáról értesít bennünket. TCF - Adatküldés vége jelzőbit (0: adatküldés folyamatban, 1: adatküldés befejeződött) A jelzőbit az adatregiszter írásával (vételi módban az olvasásával) törlődik. IAAS - "Slave eszközként megszólítva" állapotjelző (0: nincs megszólítva a mikrovezérlő, 1: egy külső eszköz slave módban megszólította a mikrovezérlőt) BUSY - Busz foglaltság jelzése (0: az I2C busz tétlen, 1: az I2C busz foglalt) ARBL - Arbitráció vesztés (0: normál busz művelet, 1: arbitráció vesztés történt). Törlése: '1' beírásával. RAM - Címtartomány egyezés (0: nincs megszólítva, 1: slave-ként megszólítva) SRW - Slave írás/olvasás vezérlés (0: a mikrovezérlő adatot kell, hogy fogadjon, 1: a mikrovezérlőtől adatot kérnek) IICIF - megszakításjelző bit (0: nincs megszakítási kérelem, 1: függőben levő megszakítás) RXAK - Nyugtázás vétele (0: nyugtázás (ACK) érkezett, 1: negatív nyugtázás (NAK) érkezett) 19
20 Az adatküldés folyamata Egy START feltétel után az I2C busz foglalt (BUSY) állapotba kerül, amíg egy STOP feltétel nem érkezik. A busz foglalt állapotában csak akkor küldhetünk adatokat, ha mi generáltuk a START feltételt, és a slave címének kiküldése az arbitráció elvesztése nélkül sikerült. Ezért fontos a BUSY jelzőbit vizsgálata, mielőtt START feltétel generálásával új tranzakciót indítanánk. Hasonlóan fontos az ARBL bit vizsgálata a slave címének kiküldése után, mielőtt további adatokat küldenénk. Az adatregiszter feltöltése után az adatátvitel elindul és az I2Cx_S regiszter TCF jelzőbitje '0'-ra vált és ebben az állapotban marad, amíg az adatbájt küldése be nem fejeződik. A program az I2Cx_S regiszter IICIF jelzőbitjének vizsgálatával értesül róla, hogy az adatküldés folyamata mikor ért véget. Ekkor az I2Cx_S regiszter RXAK jelzőbitjének vizsgálatával értesülhetünk róla, hogy a slave eszköz nyugtázta-e az adat vételét. Ha az adatküldés végén az RXAK bit '1'-be áll, akkor hiba történt (vagy negatív nyugtázás érkezett). 20
21 Az I2C modul konfigurálása A GPIO kivezetések I2C módba történő konfigurálása után az alábbi lépéseket követve konfigurálhatjuk az I2C modult, hogy adatot küldjön egy slave eszköznek: 1. Engedélyezzük az I2C modul órajelét a SIM_SCGC4 regiszter tartalmának módosításával! 2. Tiltsuk le az I2C modult a konfigurálás tartamára az I2Cx_C1 regiszter nullázásával! 3. Állítsuk be a kívánt adatátviteli sebességhez tartozó osztási arányt az I2Cx_F regiszterben! 4. Engedélyezzük az I2C modult az I2Cx_C1 regiszter IICEN bitjének '1'-be állításával! 21
22 Egy adatbájt küldése a slave eszköznek 1. Az I2Cx_S regiszter BUSY bitjének lekérdezésével várakozzunk, amíg az I2C busz szabaddá válik! 2. Az I2Cx_C1 regiszter TX bitjét állítsuk '1'-be az adatküldéshez! 3. Az I2Cx_C1 regiszter MST bitjét állítsuk '1'-be a master mód beállításához és a START feltétel generálásához! 4. Írjuk a slave 7-bites címét és az adatküldést jelző 0 bitet az I2Cx_D adatregiszterbe! 5. Az I2Cx_S regiszter IICIF bitjének lekérdezésével várakozzunk, amíg az átvitel le nem zajlik. 6. Töröljük az IICIF bitet '1' beírásával! 7. Vizsgáljuk meg az I2Cx_S regiszter ARBL bitjét, hogy nem vesztettük-e el az arbitrációt! Ha igen, akkor töröljük az ARBL bitet '1' beírásával és szakítsuk félbe a tranzakciót! 8. Ellenőrizzük az I2Cx_S regiszter RXAK bitjét, hogy a slave küldött-e pozitív nyugtázást! Ha nem, akkor szakítsuk félbe a tranzakciót! 9. Írjuk a kiküldeni kívánt adatot az I2Cx_D adatregiszterbe! 10. Az I2Cx_S regiszter IICIF bitjének lekérdezésével várakozzunk, amíg az átvitel le nem zajlik. 11. Töröljük az IICIF bitet '1' beírásával! 12. Ellenőrizzük az I2Cx_S regiszter RXAK bitjét, hogy a slave küldött-e pozitív nyugtázást! Ha nem, akkor szakítsuk félbe a tranzakciót! 13. Töröljük az I2Cx_C1 regiszter TX és MST bitjeit a STOP feltétel generálásához! 22
")
 PTE1")
23 Program9_1: Adatküldés az I2C buszon A programban egy DS1337 (vagy DS3231) Realtime órában az időt és a dátumot (az RTC elsö hét regiszterét) bájtonként külön-külön tranzakcióval töltjük fel, előre definiált értékkel. RTC modul GND VCC SDA SCL FRDM-KL25Z kártya GND 3,3 V PTE0 (I2C1_SDA) PTE1 (I2C1_SCL) 23
24 #include "MKL25Z4.h" #define SLAVE_ADDR 0x68 // #define ERR_NONE 0 // Hibátlan, nyugtázott átvitel #define ERR_NO_ACK 0x01 // Negatív nyugtázás #define ERR_ARB_LOST 0x02 // Arbitráció vesztés #define ERR_BUS_BUSY 0x03 // Busz foglaltság void I2C1_init(void); int I2C1_byteWrite(unsigned char slaveaddr, unsigned char memaddr, unsigned char data); void delayus(int n); int main(void) { unsigned char timedatetoset[] = {0x55, 0x58, 0x16, 0x01, 0x19, 0x10, 0x09; int rv; int i; I2C1_init(); for (i = 0; i < 7; i++) { rv = I2C1_byteWrite(SLAVE_ADDR, i, timedatetoset[i]); if (rv!= ERR_NONE) for(;;) ; for (;;) { Október :58:55 // Hiba kezelés jöhet ide! 24
25 // // I2C1 és a kivezetések inicializálása // void I2C1_init(void) { SIM->SCGC4 = 0x80; // I2C1 engedélyezése SIM->SCGC5 = 0x2000; // PORT E engedélyezése PORTE->PCR[1] = 0x0600; // PTE1 legyen I2C1 SCL kivezetés PORTE->PCR[0] = 0x0600; // PTE0 legyen I2C1 SDA kivezetés I2C1->C1 = 0; I2C1->S = 2; I2C1->F = 0x1F; I2C1->C1 = 0x80; // I2C1 letiltása konfiguráláshoz // IICIF törlése // 100 khz bitráta választása // I2C1 engedélyezése // // Késleltető függvény 48 MHz órajelhez // void delayus(int n) { int i, j; for(i = 0 ; i < n; i++) for (j = 0; j < 8; j++); 25
26 int I2C1_byteWrite(unsigned char slaveaddr, unsigned char memaddr, unsigned char data) { int retry = 1000; while (I2C1->S & 0x20) { // Várunk, míg a busz szabaddá válik if (--retry <= 0) return ERR_BUS_BUSY; // Legfeljebb 1000-szer próbálkozunk delayus(100); I2C1->C1 = 0x10; // TX beírása I2C1->C1 = 0x20; // MST beírása, START generálása I2C1->D = slaveaddr << 1; // Slave cím és W bit küldése while(!(i2c1->s & 0x02)); // Átvitel végére várunk I2C1->S = 0x02; // IICIF törlése if (I2C1->S & 0x10) { // Arbitráció elvesztése esetén I2C1->S = 0x10; // ARBL bit törlése return ERR_ARB_LOST; // Kilépés hibakóddal if (I2C1->S & 0x01) return ERR_NO_ACK; // Negatív nyugtázás I2C1->D = memaddr; // Regisztercím küldése while(!(i2c1->s & 0x02)); // Átvitel végére várunk I2C1->S = 0x02; // IICIF törlése if (I2C1->S & 0x01) // Negatív nyugtázás esetén return ERR_NO_ACK; // Kilépés hibakóddal I2C1->D = data; // Adat küldése while(!(i2c1->s & 0x02)); // Átvitel végére várunk I2C1->S = 0x02; // IICIF törlése if (I2C1->S & 0x01) // Negatív nyugtázás esetén return ERR_NO_ACK; // Kilépés hibakóddal I2C1->C1 &= ~0x30; // TX és MST törlése, STOP generálás return ERR_NONE; 26
27 Program9_2: Tömbösített adatküldés Az előzőhez képest csak annyi a különbség, hogy a 7 db adatot tömbösítve küldjük ki. int main(void) { unsigned char timedatetoset[] = {0x00, 0x50, 0x18, 0x07, 0x18, 0x02, 0x17; int rv; I2C1_init(); rv = I2C1_burstWrite(SLAVE_ADDR,0,7,timeDateToSet); if(rv!= ERR_NONE) { Itt van változás for(;;); // Hibakezelés jöhet ide! for (;;) { // // Tömbösített adatcsomag kiküldése a slave eszköznek // Tranzakció: S-(scím+w)-ACK-rcím-ACK-adat-ACK-...-adat-ACK-P // int I2C1_burstWrite(unsigned char slaveaddr, unsigned char memaddr, int bytecount, unsigned char* data) { int retry = 1000; while (I2C1->S & 0x20) { // Várunk, míg a busz szabaddá válik if (--retry <= 0) // Legfeljebb 1000-szer próbálkozunk return ERR_BUS_BUSY; delayus(100); 27
28 I2C1->C1 = 0x10; I2C1->C1 = 0x20; I2C1->D = slaveaddr << 1; while(!(i2c1->s & 0x02)); I2C1->S = 0x02; if (I2C1->S & 0x10) { I2C1->S = 0x10; return ERR_ARB_LOST; if (I2C1->S & 0x01) return ERR_NO_ACK; I2C1->D = memaddr; while(!(i2c1->s & 0x02)); I2C1->S = 0x02; if (I2C1->S & 0x01) return ERR_NO_ACK; while(bytecount-- > 0) { I2C1->D = *data++; while(!(i2c1->s & 0x02)); I2C1->S = 0x02; if (I2C1->S & 0x01) return ERR_NO_ACK; I2C1->C1 &= ~0x30; return ERR_NONE; // TX beírása // MST beírása, START generálása // Slave cím és W bit küldése // Átvitel végére várunk // IICIF törlése // Arbitráció elvesztése esetén // ARBL bit törlése // Kilépés hibakóddal // Negatív nyugtázás esetén // Kilépés hibakóddal // Regisztercím küldése // Átvitel végére várunk // IICIF törlése // Negatív nyugtázás esetén // Kilépés hibakóddal Itt van változás // Adat küldése // Átvitel végére várunk // IICIF törlése // Negatív nyugtázás esetén // Kilépés hibakóddal // TX és MST törlése, STOP generálás 28
 függvény paraméterei: slaveaddr - a slave eszköz címe (0x68) memaddr - a legelső adathoz tartozó regiszter sorszáma (esetünkben 0) bytecount - a beolvasandó adatok")
29 Program9_3: tömbösített beolvasás Az előző program fordítottja, amelyben egyetlen tranzakcióban olvassuk ki az RTC első hét regiszterét (a futó időt). Az ehhez definiált I2C1_burstRead() függvény paraméterei: slaveaddr - a slave eszköz címe (0x68) memaddr - a legelső adathoz tartozó regiszter sorszáma (esetünkben 0) bytecount - a beolvasandó adatok darabszáma (esetünkben 7) data - mutató az adatok eltárolására kijelölt adattáblázathoz (esetünkben a timedatetoset[] tömb kezdőcíme) Az adatbeolvasás komplikáltabb, mint az adatküldés. Az olvasást is adatküldéssel kell kezdeni: (slave címét, s meg kell adni azt a címet, ahonnan a kiolvasást kezdeni akarjuk). Ezután adatáramlási irányt kell váltani - RESTART feltétel generálásával, majd újra ki kell küldeni a slave eszköz címét, de az R/W biten most az olvasásnak megfelelő '1' áll. Ezután következhet az adatbájtok beolvasása, melyeknek beérkezését az utolsó bájt kivételével pozitív nyugtázással jeleznünk kell. 29
30 #include "MKL25Z4.h" Program9_3 (részletek) #define SLAVE_ADDR 0x68 // #define ERR_NONE 0 // Hibátlan, nyugtázott átvitel #define ERR_NO_ACK 0x01 // Negatív nyugtázás #define ERR_ARB_LOST 0x02 // Arbitráció vesztés #define ERR_BUS_BUSY 0x03 // Busz foglaltság void I2C1_init(void); int I2C1_burstRead(unsigned char slaveaddr, unsigned char memaddr, int bytecount, unsigned char* data); void delayus(int n); int main(void) { unsigned char timedatereadback[7]; int rv; I2C1_init(); rv = I2C1_burstRead(SLAVE_ADDR,0,7,timeDateReadBack); if(rv!= ERR_NONE) { for(;;); // Hibakezelés jöhet ide! for (;;) { 30
31 int I2C1_burstRead(unsigned char slaveaddr, unsigned char memaddr, int bytecount, unsigned char* data) { int retry = 1000; volatile unsigned char dummy; while (I2C1->S & 0x20) { // Várunk, míg a busz szabaddá válik if (--retry <= 0) // Legfeljebb 1000-szer próbálkozunk return ERR_BUS_BUSY; delayus(100); I2C1->C1 = 0x10; I2C1->C1 = 0x20; I2C1->D = slaveaddr << 1; while(!(i2c1->s & 0x02)); I2C1->S = 0x02; if (I2C1->S & 0x10) { I2C1->S = 0x10; return ERR_ARB_LOST; if (I2C1->S & 0x01) return ERR_NO_ACK; I2C1->D = memaddr; while(!(i2c1->s & 0x02)); I2C1->S = 0x02; if (I2C1->S & 0x01) return ERR_NO_ACK; // TX beírása // MST beírása, START generálása // Slave cím és W bit küldése // Átvitel végére várunk // IICIF törlése // Arbitráció elvesztése esetén // ARBL bit törlése // Kilépés hibakóddal // Negatív nyugtázás esetén // Kilépés hibakóddal // Regisztercím küldése // Átvitel végére várunk // IICIF törlése // Negatív nyugtázás esetén // Kilépés hibakóddal 31
32 Folytatás az előző oldalról: I2C1->C1 = 0x04; I2C1->D = (slaveaddr<<1) 1; while(!(i2c1->s & 0x02)); I2C1->S = 0x02; if (I2C1->S & 0x01) return ERR_NO_ACK; I2C1->C1 &= ~0x18; if (bytecount == 1) I2C1->C1 = 0x08; dummy = I2C1->D; while(bytecount > 0) { if (bytecount == 1) I2C1->C1 = 0x08; while(!(i2c1->s & 0x02)); I2C1->S = 0x02; if (bytecount == 1) { I2C1->C1 &= ~0x20; *data++ = I2C1->D; bytecount--; return ERR_NONE; // RESTART feltétel generálás // Slave cím és R bit küldése // Átvitel végére várunk // IICIF törlése // Negatív nyugtázás esetén // Kilépés hibakóddal // TX bit törlése, ACK küldés előkészítése // NAK küldés előkészítése // kamu olvasás, és új ciklus indítása // NAK küldés előkészítése // Átvitel végére várunk // IICIF törlése // STOP feltétel generálása // Vett adat kiolvasása 32
")
33 Program9_3 futási eredmény Ez a program sem tartalmaz kiíratást, így csak kiegészítő eszközökkel (pl. Bus Pirate, Arduino ArduPirate firmware-rel, esetleg a program9_3 mintapélda futtatása Keil MDK5 környezetben, nyomkövető módban vizsgálva) tudjuk ellenőrizni a programfutás eredményét. 33
 fejezetben bemutatott stdio átirányítással az UART0 porton formázottan kiíratjuk az aktuális idő és dátumot.")
34 Program9_4: idő kiírása UART-on Az előző programban bemutatott I2C1_burstRead() függvény segítségével kiolvassuk egy DS1337 (vagy vele kompatibilis) Real Time órát, s az Aszinkron soros kommunikáció (UART) fejezetben bemutatott stdio átirányítással az UART0 porton formázottan kiíratjuk az aktuális idő és dátumot. A programot egy órabeállítási lehetőséggel is kiegészítettük: a soros porton érkező, TYYMMDDHHMMSS formátumú paranccsal végezhetjük el a beállítást. A kiíratásokhoz a kiolvasott adatokat binárisan kódolt decimális (BCD) ábrázolásból vissza kell alakítanunk "normális" számmá. Ehhez a program elején definiáltunk egy bcdtodec() függvényt. Megjegyzés: Az Aszinkron soros kommunikáció (UART) fejezetben bemutatott soros port kezelést átalakítottuk, programmegszakításásos, bufferelt adatküldést használunk mindkét irányba. A program futásának eredménye 34
35 #include <MKL25Z4.H> #include <stdio.h> #include "uart.h" int main(void) { int hours=0,minutes=0,seconds=0; int rv, year=0, month=0, dayofmonth=0; uint8_t tbuf[7]; SystemCoreClockUpdate(); UART_config(9600); enable_irq(); // Megszakítások engedélyezése printf("\r\nprogram9_4 a FRDM-KL25Z kártyán\r\n"); I2C1_init(); while(1){ if(uart_available()) processserialcommand(); rv = I2C1_burstRead(SLAVE_ADDR,0,7,tbuf); if(rv!= ERR_NONE) { for(;;); seconds = bcdtodec(tbuf[0]) &0x7f; minutes = bcdtodec(tbuf[1]); hours = bcdtodec(tbuf[2]) & 0x3f; dayofmonth = bcdtodec(tbuf[4]); month = bcdtodec(tbuf[5]); year = bcdtodec(tbuf[6]); printf("%d-%02d-%02d ",year+2000,month,dayofmonth); printf(" %02d:%02d:%02d\n",hours,minutes,seconds); delayus( ); //-- Convert decimal numbers to BCD -- uint8_t dectobcd(uint8_t val) { return( (val/10*16) + (val%10) ); //-- Convert BCD numbers to decimal -- int bcdtodec(uint8_t val) { return (int)((val/16*10) + (val%16)); // Hibakezelés jöhet ide! 35
36 void processserialcommand() { uint8_t y, m, d, hh, mm, ss, rv; uint8_t sbuf[7]; char c = UART_getc(); switch(c){ case 'T': delayus(100000); if( UART_available() >= 12 ){ // Wait for all data to arrive // process only if all expected data is available // Parse incomming 12 ASCII charaters into y,m,d,hh,mm,ss // no error checking for numeric values in YYMDDHHMMSS fields, so be carefull! c = UART_getc(); y = c - '0'; c = UART_getc(); y = 10*y; y += c-'0'; c = UART_getc(); m = c - '0'; c = UART_getc(); m = 10*m; m += c-'0'; c = UART_getc(); d = c - '0'; c = UART_getc(); d = 10*d; d += c-'0'; c = UART_getc(); hh = c - '0'; c = UART_getc(); hh = 10*hh; hh += c-'0'; c = UART_getc(); mm = c - '0'; c = UART_getc(); mm = 10*mm; mm += c-'0'; c = UART_getc(); ss = c - '0'; c = UART_getc(); ss = 10*ss; ss += c-'0'; printf("\nrtc Set to: "); sbuf[0] = dectobcd(ss); sbuf[1] = dectobcd(mm); sbuf[2] = dectobcd(hh); sbuf[3] = 0; sbuf[4] = dectobcd(d); sbuf[5] = dectobcd(m); sbuf[6] = dectobcd(y); rv = I2C1_burstWrite(SLAVE_ADDR,0,7,sbuf); if(rv!= ERR_NONE) { for(;;); // Hibakezelés jöhet ide! while(uart_available()) UART_getc(); // clear serial buffer break; Soros porti parancsok feldolgozása RTC beállítás parancs formátuma: TYYMMDDHHMMSS Például: 2012 Oct 21 1:23pm T
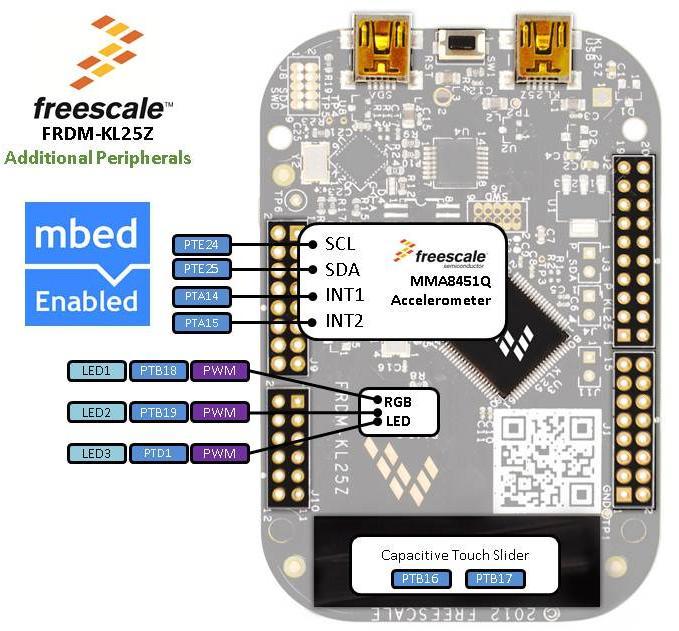
37 Program9_5: 3-tengelyű gyorsulásmérő Freescale MMA8451 van ráépítve a FRDM-KL25Z kártyára A gyorsulást méri x/y/z irányba, ±2g, ± 4g, vagy ± 8g méréshatárral Ki tudja számítani az x/y tengelyek körüli elfordulást (pitch, roll) I2C cím: 0x1D 37
38 Program9_5: 3-tengelyű gyorsulásmérő Az MMA8451Q gyorsulásmérő az I2C0 modulhoz kapcsolódik a PTE24 (SCL) és a PTE25 (SDA) kivezetéseken keresztül. Mindkét kivezetésnél a megfelelő portvezérlő regiszter MUX bitcsoportjában az Alt5 módot kell választani az I2C0 funkció eléréséhez. Ebben a programban a 14-bites X, Y, Z adatokból csak a legfelső 8 bitet olvassuk ki és használjuk fel. 38
39 Program9_5: 3-tengelyű gyorsulásmérő Az MMA8451Q gyorsulásmérő bonyolult működésének és felépítésének részleteire itt nem kívánunk kitérni, ehelyett az MMA8451Q adatlap önálló tanulmányozására buzdítjuk az olvasót. Az MMA8451Q gyorsulásmérő IC számtalan regisztere közül mi most csak az alábbiakkal foglalkozunk: #define REG_WHO_AM_I 0x0D // Eszköz azonosító, gyárilag 0x1A-ra állítva #define REG_CTRL_REG_1 0x2A // Vezérlő regiszter. Legalsó bitjét 1-re kell állítanunk #define REG_OUT_X_MSB 0x01 // A mért gyorsulás X komponense (legfelső 8 bit) #define REG_OUT_Y_MSB 0x03 // A mért gyorsulás Y komponense (legfelső 8 bit) #define REG_OUT_Z_MSB 0x05 // A mért gyorsulás Z komponense (legfelső 8 bit) A "Who am I" regiszter kiolvasásával az eszköz jelenlétét és típusát ellenőrizhetjük (0x1A olvasható ki) A vezérlő regiszter legalső bitjét 1-be kell állítani a működéshez (felébresztés standby módból). Az Out_X_MSB, Out_X_MSB és Out_Z_MSB regiszterekből a gyorsulás három dimenziós vektorának komponenseit (pontosabban azok legfelső 8 bitjét) olvashatjuk ki, előjeles formában. 39
40 #include <MKL25Z4.H> #include <stdio.h> #include "uart.h // System runs at 48MHz // Baud rate 9600, 8 bit data, no parity, 1 stop bit #define SLAVE_ADDR 0x1D // #define ERR_NONE 0 // Hibátlan, nyugtázott átvitel #define ERR_NO_ACK 0x01 // Negatív nyugtázás #define ERR_ARB_LOST 0x02 // Arbitráció vesztés #define ERR_BUS_BUSY 0x03 // Busz foglaltság #define REG_WHO_AM_I #define REG_CTRL_REG_1 #define REG_OUT_X_MSB #define REG_OUT_Y_MSB #define REG_OUT_Z_MSB 0x0D 0x2A 0x01 0x03 0x05 void acc_init(void); int acc_write(uint8_t regaddr, uint8_t data); int acc_read(uint8_t regaddr, uint8_t* data); // // Késlelteto függvény 48 MHz órajelhez // void delayus(int n) { int i, j; for(i = 0 ; i < n; i++) for (j = 0; j < 8; j++); 40
41 int main(void) { int rv,xx,yy,zz; uint8_t id,x,y,z; SystemCoreClockUpdate(); UART_config(9600); acc_init(); rv = acc_read(reg_who_am_i, &id); printf("device ID: %02x\n",id); printf("\r\nwelcome to FRDM-KL25Z board!\r\n"); while(1){ rv = acc_read(reg_out_x_msb, &x); rv += acc_read(reg_out_y_msb, &y); rv += acc_read(reg_out_z_msb, &z); if(rv) { printf("*** Hiba az I2C0 buszon!\n"); else { xx = (x>127)? x : x; yy = (y>127)? y : y; zz = (z>127)? z : z; printf("position = %4d %4d %4d\n",xx,yy,zz); delayus( ); Megjegyzés: Az Aszinkron soros kommunikáció (UART) fejezetben bemutatott soros port kezelést (uart_retarget) átalakítottuk, FIFO bufferelt és programmegszakításásos, adatküldést használunk mindkét irányba. 41
42 // // I2C0, PTE24, PTE25 és az MMA8451 inicializálása // void acc_init(void) { SIM->SCGC4 = 0x40; // I2C0 engedélyezése SIM->SCGC5 = 0x2000; // PORT E engedélyezése PORTE->PCR[24] = 0x0500; // PTE1 legyen I2C0 SCL kivezetés PORTE->PCR[25] = 0x0500; // PTE0 legyen I2C0 SDA kivezetés I2C0->C1 = 0; I2C0->S = 2; I2C0->F = 0x1F; I2C0->C1 = 0x80; acc_write(reg_ctrl_reg_1,0x01); // I2C0 letiltása konfiguráláshoz // IICIF törlése // 100 khz bitráta választása // I2C0 engedélyezése // MMA aktív módba kapcsolása 42
43 int acc_write(uint8_t regaddr, uint8_t data) { int retry = 1000; volatile uint8_t dummy; while (I2C0->S & 0x20) { // Várunk, míg a busz szabaddá válik if (--retry <= 0) // Legfeljebb 1000-szer próbálkozunk return ERR_BUS_BUSY; delayus(100); I2C0->C1 = 0x10; // TX beírása I2C0->C1 = 0x20; // MST beírása, START generálása I2C0->D = SLAVE_ADDR << 1; // Slave cím és W bit küldése while(!(i2c0->s & 0x02)); // Átvitel végére várunk I2C0->S = 0x02; // IICIF törlése if (I2C0->S & 0x10) { // Arbitráció elvesztése esetén I2C0->S = 0x10; // ARBL bit törlése return ERR_ARB_LOST; // Kilépés hibakóddal if (I2C0->S & 0x01) // Negatív nyugtázás esetén return ERR_NO_ACK; // Kilépés hibakóddal I2C0->D = regaddr; // Regisztercím küldése while(!(i2c0->s & 0x02)); // Átvitel végére várunk I2C0->S = 0x02; // IICIF törlése if (I2C0->S & 0x01) // Negatív nyugtázás esetén return ERR_NO_ACK; // Kilépés hibakóddal I2C0->D = data; while(!(i2c0->s & 0x02)); I2C0->S = 0x02; if (I2C0->S & 0x01) return ERR_NO_ACK; I2C0->C1 &= ~0x30; return ERR_NONE; // Adatbájt küldése // Átvitel végére várunk // IICIF törlése // Negatív nyugtázás esetén // Kilépés hibakóddal // TX és MST törlése, STOP generálás 43
44 int acc_read(uint8_t regaddr, uint8_t* data) { int retry = 1000; volatile uint8_t dummy; while (I2C0->S & 0x20) { // Várunk, míg a busz szabaddá válik if (--retry <= 0) // Legfeljebb 1000-szer próbálkozunk return ERR_BUS_BUSY; delayus(100); I2C0->C1 = 0x10; // TX beírása I2C0->C1 = 0x20; // MST beírása, START generálása I2C0->D = SLAVE_ADDR << 1; // Slave cím és W bit küldése while(!(i2c0->s & 0x02)); // Átvitel végére várunk I2C0->S = 0x02; // IICIF törlése if (I2C0->S & 0x10) { // Arbitráció elvesztése esetén I2C0->S = 0x10; // ARBL bit törlése return ERR_ARB_LOST; // Kilépés hibakóddal if (I2C0->S & 0x01) // Negatív nyugtázás esetén return ERR_NO_ACK; // Kilépés hibakóddal I2C0->D = regaddr; while(!(i2c0->s & 0x02)); I2C0->S = 0x02; if (I2C0->S & 0x01) return ERR_NO_ACK; I2C0->C1 = 0x04; I2C0->D = (SLAVE_ADDR<<1) 1; while(!(i2c0->s & 0x02)); I2C0->S = 0x02; if (I2C0->S & 0x01) return ERR_NO_ACK; // Regisztercím küldése // Átvitel végére várunk // IICIF törlése // Negatív nyugtázás esetén // Kilépés hibakóddal // RESTART feltétel generálás // Slave cím és R bit küldése // Átvitel végére várunk // IICIF törlése // Negatív nyugtázás esetén // Kilépés hibakóddal 44
); I2C0->S = 0x02; I2C0->C1 &= ~0x20; *data++ = I2C0->D; return ERR_NONE; // TX bit törlése, ACK küldés elokészítése // NAK küldés elokészítése // kamu olvasás, és új ciklus indítása")
45 I2C0->C1 &= ~0x18; I2C0->C1 = 0x08; dummy = I2C0->D; while(!(i2c0->s & 0x02)); I2C0->S = 0x02; I2C0->C1 &= ~0x20; *data++ = I2C0->D; return ERR_NONE; // TX bit törlése, ACK küldés elokészítése // NAK küldés elokészítése // kamu olvasás, és új ciklus indítása // Átvitel végére várunk // IICIF törlése // STOP feltétel generálása // Vett adat kiolvasása A program futási eredménye (közel vízszintes helyzetben) 45
46 46
47 47
ARM Cortex-M0+ mikrovezérlő programozása KEIL MDK 5 környezetben. 11. Impulzus-szélesség moduláció (PWM)
") ARM Cortex-M0+ mikrovezérlő programozása KEIL MDK 5 környezetben 11. Impulzus-szélesség moduláció (PWM) 1 Felhasznált anyagok, ajánlott irodalom Muhammad Ali Mazidi, Shujen Chen, Sarmad Naimi, Sepehr Naimi:
ARM Cortex-M0+ mikrovezérlő programozása KEIL MDK 5 környezetben 11. Impulzus-szélesség moduláció (PWM) 1 Felhasznált anyagok, ajánlott irodalom Muhammad Ali Mazidi, Shujen Chen, Sarmad Naimi, Sepehr Naimi:
A vezérlő alkalmas 1x16, 2x16, 2x20, 4x20 karakteres kijelzők meghajtására. Az 1. ábrán látható a modul bekötése.
 Soros LCD vezérlő A vezérlő modul lehetővé teszi, hogy az LCD-t soros vonalon illeszthessük alkalmazásunkhoz. A modul több soros protokollt is támogat, úgy, mint az RS232, I 2 C, SPI. Továbbá az LCD alapfunkcióit
Soros LCD vezérlő A vezérlő modul lehetővé teszi, hogy az LCD-t soros vonalon illeszthessük alkalmazásunkhoz. A modul több soros protokollt is támogat, úgy, mint az RS232, I 2 C, SPI. Továbbá az LCD alapfunkcióit
ARM Cortex-M0+ mikrovezérlő programozása KEIL MDK 5 környezetben. 5. Időzítők, számlálók 2. rész
 ARM Cortex-M0+ mikrovezérlő programozása KEIL MDK 5 környezetben 5. Időzítők, számlálók 2. rész 1 Felhasznált anyagok, ajánlott irodalom Joseph Yiu: The Definitive Guide to ARM Cortex -M0 and Cortex-M0+
ARM Cortex-M0+ mikrovezérlő programozása KEIL MDK 5 környezetben 5. Időzítők, számlálók 2. rész 1 Felhasznált anyagok, ajánlott irodalom Joseph Yiu: The Definitive Guide to ARM Cortex -M0 and Cortex-M0+
ARM Cortex-M0+ mikrovezérlő programozása KEIL MDK 5 környezetben. 5. Időzítők, számlálók 1. rész
 ARM Cortex-M0+ mikrovezérlő programozása KEIL MDK 5 környezetben 5. Időzítők, számlálók 1. rész 1 Felhasznált anyagok, ajánlott irodalom Joseph Yiu: The Definitive Guide to ARM Cortex -M0 and Cortex-M0+
ARM Cortex-M0+ mikrovezérlő programozása KEIL MDK 5 környezetben 5. Időzítők, számlálók 1. rész 1 Felhasznált anyagok, ajánlott irodalom Joseph Yiu: The Definitive Guide to ARM Cortex -M0 and Cortex-M0+
ARM Cortex-M0+ mikrovezérlő programozása KEIL MDK 5 környezetben. 7. Analóg perifériák
 ARM Cortex-M0+ mikrovezérlő programozása KEIL MDK 5 környezetben 7. Analóg perifériák 1 Felhasznált anyagok, ajánlott irodalom Joseph Yiu: The Definitive Guide to ARM Cortex -M0 and Cortex-M0+ Processors
ARM Cortex-M0+ mikrovezérlő programozása KEIL MDK 5 környezetben 7. Analóg perifériák 1 Felhasznált anyagok, ajánlott irodalom Joseph Yiu: The Definitive Guide to ARM Cortex -M0 and Cortex-M0+ Processors
Az I2C egy soros, 8 bit-es, kétirányú kommunikációs protokoll, amelynek sebessége normál üzemmódban 100kbit/s, gyors üzemmódban 400kbit/s.
 Az I2C busz fizikai kialakítása Az I2C egy soros, 8 bit-es, kétirányú kommunikációs protokoll, amelynek sebessége normál üzemmódban 100kbit/s, gyors üzemmódban 400kbit/s. I2C busz csak két db kétirányú
Az I2C busz fizikai kialakítása Az I2C egy soros, 8 bit-es, kétirányú kommunikációs protokoll, amelynek sebessége normál üzemmódban 100kbit/s, gyors üzemmódban 400kbit/s. I2C busz csak két db kétirányú
Programozási segédlet DS89C450 Fejlesztőpanelhez
 Programozási segédlet DS89C450 Fejlesztőpanelhez Készítette: Fekete Dávid Processzor felépítése 2 Perifériák csatlakozása a processzorhoz A perifériák adatlapjai megtalálhatók a programozasi_segedlet.zip-ben.
Programozási segédlet DS89C450 Fejlesztőpanelhez Készítette: Fekete Dávid Processzor felépítése 2 Perifériák csatlakozása a processzorhoz A perifériák adatlapjai megtalálhatók a programozasi_segedlet.zip-ben.
ARM Cortex-M0+ mikrovezérlő programozása KEIL MDK 5 környezetben. 8. Az SPI kommunikációs csatorna
 ARM Cortex-M0+ mikrovezérlő programozása KEIL MDK 5 környezetben 8. Az SPI kommunikációs csatorna 1 Felhasznált anyagok, ajánlott irodalom Joseph Yiu: The Definitive Guide to ARM Cortex -M0 and Cortex-M0+
ARM Cortex-M0+ mikrovezérlő programozása KEIL MDK 5 környezetben 8. Az SPI kommunikációs csatorna 1 Felhasznált anyagok, ajánlott irodalom Joseph Yiu: The Definitive Guide to ARM Cortex -M0 and Cortex-M0+
loop() Referencia: https://www.arduino.cc/en/reference/homepage
 Referencia: https://www.arduino.cc/en/reference/homepage") Arduino alapok Sketch ~ Solution Forrás:.ino (1.0 előtt.pde).c,.cpp,.h Külső könyvtárak (legacy / 3rd party) Mintakódok (example) setup() Induláskor fut le, kezdeti értékeket állít be, inicializálja a
Arduino alapok Sketch ~ Solution Forrás:.ino (1.0 előtt.pde).c,.cpp,.h Külső könyvtárak (legacy / 3rd party) Mintakódok (example) setup() Induláskor fut le, kezdeti értékeket állít be, inicializálja a
I 2 C, RS-232 és USB. Informatikai eszközök fizikai alapjai. Oláh Tamás István 2015.04.08
 I 2 C, RS-232 és USB Informatikai eszközök fizikai alapjai Oláh Tamás István 2015.04.08 Az I 2 C Busz Phillips által kifejlesztett kétvezetékes szinkron adatátviteli eszköz integrált áramkörök összekapcsolására
I 2 C, RS-232 és USB Informatikai eszközök fizikai alapjai Oláh Tamás István 2015.04.08 Az I 2 C Busz Phillips által kifejlesztett kétvezetékes szinkron adatátviteli eszköz integrált áramkörök összekapcsolására
ARM Cortex-M0+ mikrovezérlő programozása KEIL MDK 5 környezetben. 13. DMA közvetlen memória hozzáférés
 ARM Cortex-M0+ mikrovezérlő programozása KEIL MDK 5 környezetben 13. DMA közvetlen memória hozzáférés 1 Felhasznált anyagok, ajánlott irodalom ARM University Program: Course/Lab Material for Teaching Embedded
ARM Cortex-M0+ mikrovezérlő programozása KEIL MDK 5 környezetben 13. DMA közvetlen memória hozzáférés 1 Felhasznált anyagok, ajánlott irodalom ARM University Program: Course/Lab Material for Teaching Embedded
LOGSYS LOGSYS LCD KIJELZŐ MODUL FELHASZNÁLÓI ÚTMUTATÓ. 2010. november 8. Verzió 1.0. http://logsys.mit.bme.hu
 LOGSYS LCD KIJELZŐ MODUL FELHASZNÁLÓI ÚTMUTATÓ 2010. november 8. Verzió 1.0 http://logsys.mit.bme.hu Tartalomjegyzék 1 Bevezetés... 1 2 Kommunikációs interfész... 2 3 Memóriák az LCD vezérlőben... 3 3.1
LOGSYS LCD KIJELZŐ MODUL FELHASZNÁLÓI ÚTMUTATÓ 2010. november 8. Verzió 1.0 http://logsys.mit.bme.hu Tartalomjegyzék 1 Bevezetés... 1 2 Kommunikációs interfész... 2 3 Memóriák az LCD vezérlőben... 3 3.1
Bevezetés a mikrovezérlők programozásába: MAX6958: Hétszegmenses LED kijelző vezérlő
 Bevezetés a mikrovezérlők programozásába: MAX6958: Hétszegmenses LED kijelző vezérlő 1 Lab 20 projektek MiniPirate.ino Arduino Mini Pirate interaktív vizsgálóprogram, amelyet most az I2C busz kézivezérlésére
Bevezetés a mikrovezérlők programozásába: MAX6958: Hétszegmenses LED kijelző vezérlő 1 Lab 20 projektek MiniPirate.ino Arduino Mini Pirate interaktív vizsgálóprogram, amelyet most az I2C busz kézivezérlésére
The modular mitmót system. DPY kijelző kártya C API
 The modular mitmót system DPY kijelző kártya C API Dokumentációkód: -D 01.0.0.0 Budapesti Műszaki és Gazdaságtudományi Egyetem Méréstechnika és Információs Rendszerek Tanszék Beágyazott Információs Rendszerek
The modular mitmót system DPY kijelző kártya C API Dokumentációkód: -D 01.0.0.0 Budapesti Műszaki és Gazdaságtudományi Egyetem Méréstechnika és Információs Rendszerek Tanszék Beágyazott Információs Rendszerek
Bevezetés az elektronikába
 Bevezetés az elektronikába 15. Arduino programozás Hétszegmenses kijelzők 2. rész 1 Betűvadászat A 7 db szegmens mindegyike lehet ki- vagy bekapcsolt állapotban. A lehetséges állapotok száma: 27 = 128
Bevezetés az elektronikába 15. Arduino programozás Hétszegmenses kijelzők 2. rész 1 Betűvadászat A 7 db szegmens mindegyike lehet ki- vagy bekapcsolt állapotban. A lehetséges állapotok száma: 27 = 128
Mintavételezés tanulmányozása. AD - konverzió. Soros kommunikáció
 Mintavételezés tanulmányozása. AD - konverzió. Soros kommunikáció A gyakorlat célja A gyakorlat során a dspic30f6010 digitális jelprocesszor Analóg Digital konverterét tanulmányozzuk. A mintavételezett
Mintavételezés tanulmányozása. AD - konverzió. Soros kommunikáció A gyakorlat célja A gyakorlat során a dspic30f6010 digitális jelprocesszor Analóg Digital konverterét tanulmányozzuk. A mintavételezett
Mikrovezérlők Alkalmazástechnikája
 Gingl Zoltán, 2015, Szeged Mikrovezérlők Alkalmazástechnikája 2015.12.06. 11:45 Kommunikációs áramkörök és használatuk 1 Processzoroknál tipikusan párhuzamos átvitel adatbusz címbusz vezérlőjelek, szinkronizálás
Gingl Zoltán, 2015, Szeged Mikrovezérlők Alkalmazástechnikája 2015.12.06. 11:45 Kommunikációs áramkörök és használatuk 1 Processzoroknál tipikusan párhuzamos átvitel adatbusz címbusz vezérlőjelek, szinkronizálás
Perifériák hozzáadása a rendszerhez
 Perifériák hozzáadása a rendszerhez Intellectual Property (IP) katalógus: Az elérhető IP modulok listája Bal oldalon az IP Catalog fül Ingyenes IP modulok Fizetős IP modulok: korlátozások Időkorlátosan
Perifériák hozzáadása a rendszerhez Intellectual Property (IP) katalógus: Az elérhető IP modulok listája Bal oldalon az IP Catalog fül Ingyenes IP modulok Fizetős IP modulok: korlátozások Időkorlátosan
_INVHU000_WriteReadParameter.cxf Frekvenciaváltók
 INV-HU-000 A FB feladata A dokumentáció tartalma Szimbólum A CP1H vagy a CP1L PLC és frekvenciaváltó(k) automatikus kommunikációja: _INVHU000_WriteReadParameter A frekvenciaváltó üzemi paramétereinek írása,
INV-HU-000 A FB feladata A dokumentáció tartalma Szimbólum A CP1H vagy a CP1L PLC és frekvenciaváltó(k) automatikus kommunikációja: _INVHU000_WriteReadParameter A frekvenciaváltó üzemi paramétereinek írása,
Az interrupt Benesóczky Zoltán 2004
 Az interrupt Benesóczky Zoltán 2004 1 Az interrupt (program megszakítás) órajel generátor cím busz környezet RESET áramkör CPU ROM RAM PERIF. adat busz vezérlõ busz A periféria kezelés során információt
Az interrupt Benesóczky Zoltán 2004 1 Az interrupt (program megszakítás) órajel generátor cím busz környezet RESET áramkör CPU ROM RAM PERIF. adat busz vezérlõ busz A periféria kezelés során információt
4.1.1. I 2 C, SPI, I 2 S, USB, PWM, UART, IrDA
 4.1.1. I 2 C, SPI, I 2 S, USB, PWM, UART, IrDA A címben található jelölések a mikrovezérlők kimentén megjelenő tipikus perifériák, típus jelzései. Mindegyikkel röviden foglalkozni fogunk a folytatásban.
4.1.1. I 2 C, SPI, I 2 S, USB, PWM, UART, IrDA A címben található jelölések a mikrovezérlők kimentén megjelenő tipikus perifériák, típus jelzései. Mindegyikkel röviden foglalkozni fogunk a folytatásban.
MSP430 programozás Energia környezetben. Digitális szenzorok I2C kommunikációval
 MSP430 programozás Energia környezetben Digitális szenzorok I2C kommunikációval 1 I2C kommunikáció Az I2C (Inter-Integrated Circuit = integrált áramkörök közötti) kétvezetékes soros kommunikációs sínt
MSP430 programozás Energia környezetben Digitális szenzorok I2C kommunikációval 1 I2C kommunikáció Az I2C (Inter-Integrated Circuit = integrált áramkörök közötti) kétvezetékes soros kommunikációs sínt
Mikrovezérlők Alkalmazástechnikája
 Gingl Zoltán, 2017, Szeged Mikrovezérlők Alkalmazástechnikája 18 jan. 1 Processzoroknál tipikusan párhuzamos átvitel adatbusz címbusz vezérlőjelek, szinkronizálás Mikrovezérlőknél soros átvitel Kevés vezeték
Gingl Zoltán, 2017, Szeged Mikrovezérlők Alkalmazástechnikája 18 jan. 1 Processzoroknál tipikusan párhuzamos átvitel adatbusz címbusz vezérlőjelek, szinkronizálás Mikrovezérlőknél soros átvitel Kevés vezeték
MSP430 programozás Energia környezetben. LED mátrix vezérlése MAX7219 IC-vel
 MSP430 programozás Energia környezetben LED mátrix vezérlése MAX7219 IC-vel 1 LED 8x8 mátrix 3 mm-es piros LED-ek 8x8 mátrixba szervezve 1088AS vagy M1388AR típusnál a sorkiválasztó vonal a közös katód
MSP430 programozás Energia környezetben LED mátrix vezérlése MAX7219 IC-vel 1 LED 8x8 mátrix 3 mm-es piros LED-ek 8x8 mátrixba szervezve 1088AS vagy M1388AR típusnál a sorkiválasztó vonal a közös katód
A LOGSYS GUI. Fehér Béla Raikovich Tamás, Laczkó Péter BME MIT FPGA laboratórium
 BUDAPESTI MŐSZAKI ÉS GAZDASÁGTUDOMÁNYI EGYETEM VILLAMOSMÉRNÖKI ÉS INFORMATIKAI KAR MÉRÉSTECHNIKA ÉS INFORMÁCIÓS RENDSZEREK TANSZÉK A LOGSYS GUI Fehér Béla Raikovich Tamás, Laczkó Péter BME MIT atórium
BUDAPESTI MŐSZAKI ÉS GAZDASÁGTUDOMÁNYI EGYETEM VILLAMOSMÉRNÖKI ÉS INFORMATIKAI KAR MÉRÉSTECHNIKA ÉS INFORMÁCIÓS RENDSZEREK TANSZÉK A LOGSYS GUI Fehér Béla Raikovich Tamás, Laczkó Péter BME MIT atórium
MSP430 programozás Energia környezetben. LED kijelzok második rész
 MSP430 programozás Energia környezetben LED kijelzok második rész 1 Lab13 SPI_595_7seg Egyszerű mintaprogram kétszámjegyű hétszegmenses LED kijelzővel, 74HC595 shift regiszterrel, SPI programkönyvtár használattal
MSP430 programozás Energia környezetben LED kijelzok második rész 1 Lab13 SPI_595_7seg Egyszerű mintaprogram kétszámjegyű hétszegmenses LED kijelzővel, 74HC595 shift regiszterrel, SPI programkönyvtár használattal
SR mini PLC Modbus illesztő modul. Modul beállítása Bemeneti pontok kiosztása főmodul esetén Bemeneti pontok címkiosztása kiegészítő modul esetében
 SR mini PLC Modbus illesztő modul Modul beállítása Bemeneti pontok kiosztása főmodul esetén Bemeneti pontok címkiosztása kiegészítő modul esetében Kimeneti pontok címkiosztása főmodul esetében, olvasásra
SR mini PLC Modbus illesztő modul Modul beállítása Bemeneti pontok kiosztása főmodul esetén Bemeneti pontok címkiosztása kiegészítő modul esetében Kimeneti pontok címkiosztása főmodul esetében, olvasásra
I. C8051Fxxx mikrovezérlők hardverfelépítése, működése. II. C8051Fxxx mikrovezérlők programozása. III. Digitális perifériák
 I. C8051Fxxx mikrovezérlők hardverfelépítése, működése 1. Adja meg a belső RAM felépítését! 2. Miben különbözik a belső RAM alsó és felső felének elérhetősége? 3. Hogyan érhetők el az SFR regiszterek?
I. C8051Fxxx mikrovezérlők hardverfelépítése, működése 1. Adja meg a belső RAM felépítését! 2. Miben különbözik a belső RAM alsó és felső felének elérhetősége? 3. Hogyan érhetők el az SFR regiszterek?
Mikrorendszerek tervezése
 BUDAPESTI MŰSZAKI ÉS GAZDASÁGTUDOMÁNYI EGYETEM VILLAMOSMÉRNÖKI ÉS INFORMATIKAI KAR MÉRÉSTECHNIKA ÉS INFORMÁCIÓS RENDSZEREK TANSZÉK Mikrorendszerek tervezése Megszakítás- és kivételkezelés Fehér Béla Raikovich
BUDAPESTI MŰSZAKI ÉS GAZDASÁGTUDOMÁNYI EGYETEM VILLAMOSMÉRNÖKI ÉS INFORMATIKAI KAR MÉRÉSTECHNIKA ÉS INFORMÁCIÓS RENDSZEREK TANSZÉK Mikrorendszerek tervezése Megszakítás- és kivételkezelés Fehér Béla Raikovich
ARM Cortex-M0+ mikrovezérlő programozása KEIL MDK 5 környezetben. 4. Aszinkron soros kommunikáció (UART)
") ARM Cortex-M0+ mikrovezérlő programozása KEIL MDK 5 környezetben 4. Aszinkron soros kommunikáció (UART) 1 Felhasznált anyagok, ajánlott irodalom Joseph Yiu: The Definitive Guide to ARM Cortex -M0 and Cortex-M0+
ARM Cortex-M0+ mikrovezérlő programozása KEIL MDK 5 környezetben 4. Aszinkron soros kommunikáció (UART) 1 Felhasznált anyagok, ajánlott irodalom Joseph Yiu: The Definitive Guide to ARM Cortex -M0 and Cortex-M0+
Az MSP430 mikrovezérlők digitális I/O programozása
 10.2.1. Az MSP430 mikrovezérlők digitális I/O programozása Az MSP430 mikrovezérlők esetében minden kimeneti / bemeneti (I/O) vonal önállóan konfigurálható, az P1. és P2. csoportnak van megszakítás létrehozó
10.2.1. Az MSP430 mikrovezérlők digitális I/O programozása Az MSP430 mikrovezérlők esetében minden kimeneti / bemeneti (I/O) vonal önállóan konfigurálható, az P1. és P2. csoportnak van megszakítás létrehozó
The modular mitmót system. 433, 868MHz-es ISM sávú rádiós kártya
 The modular mitmót system 433, 868MHz-es ISM sávú rádiós kártya Kártyakód: COM-R04-S-01b Felhasználói dokumentáció Dokumentációkód: -D01a Budapesti Műszaki és Gazdaságtudományi Egyetem Méréstechnika és
The modular mitmót system 433, 868MHz-es ISM sávú rádiós kártya Kártyakód: COM-R04-S-01b Felhasználói dokumentáció Dokumentációkód: -D01a Budapesti Műszaki és Gazdaságtudományi Egyetem Méréstechnika és
SLS-500-MBUS-MODBUS átalakító. Magyar nyelvű használati utasítás
 SLS-500-MBUS-MODBUS átalakító Magyar nyelvű használati utasítás 1 Tartalomjegyzék Paraméterek...3 Csatlakozási pontok...4 Csatlakozási példák...5 Konfigurációs program...6 Gyors áttekintő...6 Menüpontok...7
SLS-500-MBUS-MODBUS átalakító Magyar nyelvű használati utasítás 1 Tartalomjegyzék Paraméterek...3 Csatlakozási pontok...4 Csatlakozási példák...5 Konfigurációs program...6 Gyors áttekintő...6 Menüpontok...7
IDAXA-PiroSTOP. PIRINT PiroFlex Interfész. Terméklap
 IDAXA-PiroSTOP PIRINT PiroFlex Interfész Terméklap Hexium Kft. PIRINT Terméklap Rev 2 2 Tartalomjegyzék. ISMERTETŐ... 3 2. HARDVER... 4 2. LED... 5 2.2 KAPCSOLAT A VKGY GYŰRŰVEL... 6 2.3 CÍMBEÁLLÍTÁS...
IDAXA-PiroSTOP PIRINT PiroFlex Interfész Terméklap Hexium Kft. PIRINT Terméklap Rev 2 2 Tartalomjegyzék. ISMERTETŐ... 3 2. HARDVER... 4 2. LED... 5 2.2 KAPCSOLAT A VKGY GYŰRŰVEL... 6 2.3 CÍMBEÁLLÍTÁS...
Mérési jegyzőkönyv. az ötödik méréshez
 Mérési jegyzőkönyv az ötödik méréshez A mérés időpontja: 2007-10-30 A mérést végezték: Nyíri Gábor kdu012 mérőcsoport A mérést vezető oktató neve: Szántó Péter A jegyzőkönyvet tartalmazó fájl neve: ikdu0125.doc
Mérési jegyzőkönyv az ötödik méréshez A mérés időpontja: 2007-10-30 A mérést végezték: Nyíri Gábor kdu012 mérőcsoport A mérést vezető oktató neve: Szántó Péter A jegyzőkönyvet tartalmazó fájl neve: ikdu0125.doc
XII. PÁRHUZAMOS ÉS A SOROS ADATÁTVITEL
 XII. PÁRHUZAMOS ÉS A SOROS ADATÁTVITEL Ma, a sok más felhasználás mellett, rendkívül jelentős az adatok (információk) átvitelével foglakozó ágazat. Az átvitel történhet rövid távon, egy berendezésen belül,
XII. PÁRHUZAMOS ÉS A SOROS ADATÁTVITEL Ma, a sok más felhasználás mellett, rendkívül jelentős az adatok (információk) átvitelével foglakozó ágazat. Az átvitel történhet rövid távon, egy berendezésen belül,
Autóipari beágyazott rendszerek. Local Interconnection Network
 Autóipari beágyazott rendszerek Local Interconnection Network 1 Áttekintés Motiváció Kis sebességigényű alkalmazások A CAN drága Kvarc oszcillátort igényel Speciális perifériát igényel Két vezetéket igényel
Autóipari beágyazott rendszerek Local Interconnection Network 1 Áttekintés Motiváció Kis sebességigényű alkalmazások A CAN drága Kvarc oszcillátort igényel Speciális perifériát igényel Két vezetéket igényel
ARM Cortex-M0+ mikrovezérlő programozása KEIL MDK 5 környezetben. 1. Az ARM Cortex-M0+ CPU jellemzői
 ARM Cortex-M0+ mikrovezérlő programozása KEIL MDK 5 környezetben 1. Az ARM Cortex-M0+ CPU jellemzői Hobbielektronika csoport 2015/2016 1 Felhasznált anyagok, ajánlott irodalom Joseph Yiu: The Definitive
ARM Cortex-M0+ mikrovezérlő programozása KEIL MDK 5 környezetben 1. Az ARM Cortex-M0+ CPU jellemzői Hobbielektronika csoport 2015/2016 1 Felhasznált anyagok, ajánlott irodalom Joseph Yiu: The Definitive
Digitális technika VIMIAA01
 BUDAPESTI MŰSZAKI ÉS GAZDASÁGTUDOMÁNYI EGYETEM VILLAMOSMÉRNÖKI ÉS INFORMATIKAI KAR MÉRÉSTECHNIKA ÉS INFORMÁCIÓS RENDSZEREK TANSZÉK Digitális technika VIMIAA01 Fehér Béla BME MIT A kommunikációs technológiák
BUDAPESTI MŰSZAKI ÉS GAZDASÁGTUDOMÁNYI EGYETEM VILLAMOSMÉRNÖKI ÉS INFORMATIKAI KAR MÉRÉSTECHNIKA ÉS INFORMÁCIÓS RENDSZEREK TANSZÉK Digitális technika VIMIAA01 Fehér Béla BME MIT A kommunikációs technológiák
Digitális technika VIMIAA01
 BUDAPESTI MŰSZAKI ÉS GAZDASÁGTUDOMÁNYI EGYETEM VILLAMOSMÉRNÖKI ÉS INFORMATIKAI KAR MÉRÉSTECHNIKA ÉS INFORMÁCIÓS RENDSZEREK TANSZÉK Digitális technika VIMIAA01 Fehér Béla BME MIT A kommunikációs technológiák
BUDAPESTI MŰSZAKI ÉS GAZDASÁGTUDOMÁNYI EGYETEM VILLAMOSMÉRNÖKI ÉS INFORMATIKAI KAR MÉRÉSTECHNIKA ÉS INFORMÁCIÓS RENDSZEREK TANSZÉK Digitális technika VIMIAA01 Fehér Béla BME MIT A kommunikációs technológiák
Az AVR programozás alapjai. Előadja: Both Tamás
 Az AVR programozás alapjai Előadja: Both Tamás Fordító C nyelven programozunk Ehhez az AVR-GCC fordító áll rendelkezésre Ennek használatához a WinAVR-t kell telepíteni Teljes értékű C fordító, minden megengedett,
Az AVR programozás alapjai Előadja: Both Tamás Fordító C nyelven programozunk Ehhez az AVR-GCC fordító áll rendelkezésre Ennek használatához a WinAVR-t kell telepíteni Teljes értékű C fordító, minden megengedett,
Labor gyakorlat Mikrovezérlők
 Labor gyakorlat Mikrovezérlők ATMEL AVR ARDUINO 1. ELŐADÁS BUDAI TAMÁS Tartalom Labor 2 mikrovezérlők modul 2 alkalom 1 mikrovezérlők felépítése, elmélet 2 programozás, mintaprogramok Értékelés: a 2. alkalom
Labor gyakorlat Mikrovezérlők ATMEL AVR ARDUINO 1. ELŐADÁS BUDAI TAMÁS Tartalom Labor 2 mikrovezérlők modul 2 alkalom 1 mikrovezérlők felépítése, elmélet 2 programozás, mintaprogramok Értékelés: a 2. alkalom
Vegyes témakörök. A KAT120B kijelző vezérlése Arduinoval
 Vegyes témakörök A KAT120B kijelző vezérlése Arduinoval 1 KAT120B hívószám kijelző A KAT120B kijelző a NEMO-Q International AB egy régi terméke. A cég ma is fogalmaz különféle hívószám kijelzőket bankok,
Vegyes témakörök A KAT120B kijelző vezérlése Arduinoval 1 KAT120B hívószám kijelző A KAT120B kijelző a NEMO-Q International AB egy régi terméke. A cég ma is fogalmaz különféle hívószám kijelzőket bankok,
ARM Cortex magú mikrovezérlők
 ARM Cortex magú mikrovezérlők 5. Mikrovezérlő alapperifériák Scherer Balázs Budapest University of Technology and Economics Department of Measurement and Information Systems BME-MIT 2017 Tartalom Általános
ARM Cortex magú mikrovezérlők 5. Mikrovezérlő alapperifériák Scherer Balázs Budapest University of Technology and Economics Department of Measurement and Information Systems BME-MIT 2017 Tartalom Általános
Programozott soros szinkron adatátvitel
 Programozott soros szinkron adatátvitel 1. Feladat Név:... Irjon programot, mely a P1.0 kimenet egy lefutó élének időpontjában a P1.1 kimeneten egy adatbitet ad ki. A bájt legalacsonyabb helyiértéke 1.
Programozott soros szinkron adatátvitel 1. Feladat Név:... Irjon programot, mely a P1.0 kimenet egy lefutó élének időpontjában a P1.1 kimeneten egy adatbitet ad ki. A bájt legalacsonyabb helyiértéke 1.
MSP430 programozás Energia környezetben. Kitekintés, további lehetőségek
 MSP430 programozás Energia környezetben Kitekintés, további lehetőségek 1 Még nem merítettünk ki minden lehetőséget Kapacitív érzékelés (nyomógombok vagy csúszka) Az Energia egyelőre nem támogatja, csak
MSP430 programozás Energia környezetben Kitekintés, további lehetőségek 1 Még nem merítettünk ki minden lehetőséget Kapacitív érzékelés (nyomógombok vagy csúszka) Az Energia egyelőre nem támogatja, csak
Architektúra, megszakítási rendszerek
 Architektúra, megszakítási ek Mirıl lesz szó? Megszakítás fogalma Megszakítás folyamata Többszintű megszakítási ek Koschek Vilmos Példa: Intel Pentium vkoschek@vonalkodhu Koschek Vilmos Fogalom A számítógép
Architektúra, megszakítási ek Mirıl lesz szó? Megszakítás fogalma Megszakítás folyamata Többszintű megszakítási ek Koschek Vilmos Példa: Intel Pentium vkoschek@vonalkodhu Koschek Vilmos Fogalom A számítógép
CIMR-V7AZ, CIMR-F7Z, CIMR-E7Z, CIMR-L7Z, CIMR-G7 V1000 sorozat CIMR-VZA PLC CPU-k CP1H-X, CP1H-XA, CP1H-Y CP1L-L, CP1L-M
 INV-HU-001 A FB feladata A dokumentáció tartalma Szimbólum A CP1H vagy a CP1L PLC és frekvenciaváltó(k) automatikus kommunikációja: _INVHU001_WriteReadParameter A frekvenciaváltó üzemi paramétereinek írása,
INV-HU-001 A FB feladata A dokumentáció tartalma Szimbólum A CP1H vagy a CP1L PLC és frekvenciaváltó(k) automatikus kommunikációja: _INVHU001_WriteReadParameter A frekvenciaváltó üzemi paramétereinek írása,
Megoldás. Feladat 1. Statikus teszt Specifikáció felülvizsgálat
 Megoldás Feladat 1. Statikus teszt Specifikáció felülvizsgálat A feladatban szereplő specifikáció eredeti, angol nyelvű változata egy létező eszköz leírása. Nem állítjuk, hogy az eredeti dokumentum jól
Megoldás Feladat 1. Statikus teszt Specifikáció felülvizsgálat A feladatban szereplő specifikáció eredeti, angol nyelvű változata egy létező eszköz leírása. Nem állítjuk, hogy az eredeti dokumentum jól
PMU Kezdı lépések. 6-0 Csatlakozás LG GLOFA-GM és SAMSUNG PLC-hez. 6-1 Kommunikáció LG PMU és LG GLOFA-GM7 / GM6 / GM4 között
 -0 Csatlakozás LG GLOFA-GM és SAMSUNG PLC-hez -1 Kommunikáció LG PMU és LG GLOFA-GM / GM között -1-1 PLC programozó csatlakozója ( CPU loader port ) -1- PLC beépített C-NET csatlakozója (CPU C-net) -1-
-0 Csatlakozás LG GLOFA-GM és SAMSUNG PLC-hez -1 Kommunikáció LG PMU és LG GLOFA-GM / GM között -1-1 PLC programozó csatlakozója ( CPU loader port ) -1- PLC beépített C-NET csatlakozója (CPU C-net) -1-
T Bird 2. AVR fejlesztőpanel. Használati utasítás. Gyártja: BioDigit Kft. Forgalmazza: HEStore.hu webáruház. BioDigit Kft, 2012. Minden jog fenntartva
 T Bird 2 AVR fejlesztőpanel Használati utasítás Gyártja: BioDigit Kft Forgalmazza: HEStore.hu webáruház BioDigit Kft, 2012 Minden jog fenntartva Főbb tulajdonságok ATMEL AVR Atmega128 típusú mikrovezérlő
T Bird 2 AVR fejlesztőpanel Használati utasítás Gyártja: BioDigit Kft Forgalmazza: HEStore.hu webáruház BioDigit Kft, 2012 Minden jog fenntartva Főbb tulajdonságok ATMEL AVR Atmega128 típusú mikrovezérlő
Bevezetés az elektronikába
 Bevezetés az elektronikába 18. Arduino programozás LCD kijelzők alkalmazása II. rész 1 HD44780 kompatibilis kijelzők A HD44780 vagy kompatibilis vezérlővel ellátott alfanumerikus (csak rögzített karakterképet
Bevezetés az elektronikába 18. Arduino programozás LCD kijelzők alkalmazása II. rész 1 HD44780 kompatibilis kijelzők A HD44780 vagy kompatibilis vezérlővel ellátott alfanumerikus (csak rögzített karakterképet
Moduláris USB billentyűzet emulátor
 Moduláris USB billentyűzet emulátor Használati és programozási leírás 2016. április Ismertető A modul alkalmas általános célú HID eszközként a számítógéphez csatlakoztatva szabványos billentyűzet emulációjára.
Moduláris USB billentyűzet emulátor Használati és programozási leírás 2016. április Ismertető A modul alkalmas általános célú HID eszközként a számítógéphez csatlakoztatva szabványos billentyűzet emulációjára.
Labor gyakorlat Mikrovezérlők
 Labor gyakorlat Mikrovezérlők ATMEL AVR ARDUINO 1. ELŐADÁS BUDAI TAMÁS 2015. 09. 06. Tartalom Labor 2 mikrovezérlők modul 2 alkalom 1 mikrovezérlők felépítése, elmélet 2 programozás, mintaprogramok Értékelés:
Labor gyakorlat Mikrovezérlők ATMEL AVR ARDUINO 1. ELŐADÁS BUDAI TAMÁS 2015. 09. 06. Tartalom Labor 2 mikrovezérlők modul 2 alkalom 1 mikrovezérlők felépítése, elmélet 2 programozás, mintaprogramok Értékelés:
Silabs STK3700, Simplicity Studio laborgyakorlat
 Silabs STK3700, Simplicity Studio laborgyakorlat Scherer Balázs Budapest University of Technology and Economics Department of Measurement and Information Systems BME-MIT 2016 Saját Firmware library Saját
Silabs STK3700, Simplicity Studio laborgyakorlat Scherer Balázs Budapest University of Technology and Economics Department of Measurement and Information Systems BME-MIT 2016 Saját Firmware library Saját
AC-MF1W. RFID kártyaolvasó és kódzár. Felhasználói leírás
 AC-MF1W RFID kártyaolvasó és kódzár Felhasználói leírás Tartalomjegyzék 1. Leírás... 3 1.1 Tulajdonságok... 3 1.2 Műszaki adatok... 3 1.3 Felszerelés... 3 1.4 Csatlakoztatás... 4 1.4.1 Bekötés... 4 1.4.2
AC-MF1W RFID kártyaolvasó és kódzár Felhasználói leírás Tartalomjegyzék 1. Leírás... 3 1.1 Tulajdonságok... 3 1.2 Műszaki adatok... 3 1.3 Felszerelés... 3 1.4 Csatlakoztatás... 4 1.4.1 Bekötés... 4 1.4.2
SZORGALMI FELADAT. 17. Oktober
 SZORGALMI FELADAT F2. Tervezzen egy statikus aszinkron SRAM memóriainterfész áramkört a kártyán található 128Ki*8 bites memóriához! Az áramkör legyen képes az írási és olvasási műveletek végrehajtására
SZORGALMI FELADAT F2. Tervezzen egy statikus aszinkron SRAM memóriainterfész áramkört a kártyán található 128Ki*8 bites memóriához! Az áramkör legyen képes az írási és olvasási műveletek végrehajtására
9.1.1. ARM mikrovezérlők programozása
 9.1.1. ARM mikrovezérlők programozása E fejezetben az ARM mikrovezérlők programozása lesz ismertetve néhány példaprogram és gyakorlati alkalmazás bemutatásával. Az általunk használt ARM mikrovezérlő gyártója
9.1.1. ARM mikrovezérlők programozása E fejezetben az ARM mikrovezérlők programozása lesz ismertetve néhány példaprogram és gyakorlati alkalmazás bemutatásával. Az általunk használt ARM mikrovezérlő gyártója
MSP430 programozás Energia környezetben. Az I/O portok kezelése
 MSP430 programozás Energia környezetben Az I/O portok kezelése 1 Egyszerű I/O vezérlés Digitális I/O pinmode(pin, mode) kivezetés üzemmódjának beállítása digitalwrite(pin, state) - kimenetvezérlés digitalread(pin)
MSP430 programozás Energia környezetben Az I/O portok kezelése 1 Egyszerű I/O vezérlés Digitális I/O pinmode(pin, mode) kivezetés üzemmódjának beállítása digitalwrite(pin, state) - kimenetvezérlés digitalread(pin)
MSP430 programozás Energia környezetben. LED kijelzok második rész
 MSP430 programozás Energia környezetben LED kijelzok második rész 1 Lab13 SPI_595_7seg Egyszerű mintaprogram kétszámjegyű hétszegmenses LED kijelzővel, 74HC595 shift regiszterrel, SPI programkönyvtár használattal
MSP430 programozás Energia környezetben LED kijelzok második rész 1 Lab13 SPI_595_7seg Egyszerű mintaprogram kétszámjegyű hétszegmenses LED kijelzővel, 74HC595 shift regiszterrel, SPI programkönyvtár használattal
Labor 2 Mikrovezérlők
 Labor 2 Mikrovezérlők ATMEL AVR - ARDUINO BUDAI TAMÁS 2015. 09. 06. Tartalom Mikrovezérlők Mikrovezérlők felépítése, működése Mikrovezérlő típusok, gyártók Mikrovezérlők perifériái Mikrovezérlők programozása
Labor 2 Mikrovezérlők ATMEL AVR - ARDUINO BUDAI TAMÁS 2015. 09. 06. Tartalom Mikrovezérlők Mikrovezérlők felépítése, működése Mikrovezérlő típusok, gyártók Mikrovezérlők perifériái Mikrovezérlők programozása
ARM Cortex magú mikrovezérlők
 ARM Cortex magú mikrovezérlők 5. Mikrovezérlő alapperifériák Scherer Balázs Budapest University of Technology and Economics Department of Measurement and Information Systems BME-MIT 2017 Tartalom Általános
ARM Cortex magú mikrovezérlők 5. Mikrovezérlő alapperifériák Scherer Balázs Budapest University of Technology and Economics Department of Measurement and Information Systems BME-MIT 2017 Tartalom Általános
Vegyes témakörök. 1. Soros vezérlésű LCD számkijelző. Hobbielektronika csoport 2018/2019. Debreceni Megtestesülés Plébánia
 Vegyes témakörök 1. Soros vezérlésű LCD számkijelző 1 Felhasznált anyagok Microchip: AN658 LCD Fundamentals... PHILIPS: Az I2C busz és használata Instructables: Arduino MiniPirate leírás MiniPirate forráskód:
Vegyes témakörök 1. Soros vezérlésű LCD számkijelző 1 Felhasznált anyagok Microchip: AN658 LCD Fundamentals... PHILIPS: Az I2C busz és használata Instructables: Arduino MiniPirate leírás MiniPirate forráskód:
1 done by: b+bme. Adja meg, hogy milyen ICW3 parancsot kell küldeni a MASTER illetve a SLAVE egységeknek!
 1 done by: b+bme 6 a.) Egy kaszkádosított megszakításkezelő rendszerben, milyen esetben kell parancsbyte-ban megadni a SLAVE megszakításkezelőknek, hogy slave áramkörök? - kaszkádosítás esetén, illetve
1 done by: b+bme 6 a.) Egy kaszkádosított megszakításkezelő rendszerben, milyen esetben kell parancsbyte-ban megadni a SLAVE megszakításkezelőknek, hogy slave áramkörök? - kaszkádosítás esetén, illetve
Irányítástechnika 1. 8. Elıadás. PLC rendszerek konfigurálása
 Irányítástechnika 1 8. Elıadás PLC rendszerek konfigurálása Irodalom - Helmich József: Irányítástechnika I, 2005 - Zalotay Péter: PLC tanfolyam - Klöckner-Möller Hungária: Hardverleírás és tervezési segédlet,
Irányítástechnika 1 8. Elıadás PLC rendszerek konfigurálása Irodalom - Helmich József: Irányítástechnika I, 2005 - Zalotay Péter: PLC tanfolyam - Klöckner-Möller Hungária: Hardverleírás és tervezési segédlet,
Mintavételes szabályozás mikrovezérlő segítségével
 Automatizálási Tanszék Mintavételes szabályozás mikrovezérlő segítségével Budai Tamás budai.tamas@sze.hu http://maxwell.sze.hu/~budait Tartalom Mikrovezérlőkről röviden Programozási alapismeretek ismétlés
Automatizálási Tanszék Mintavételes szabályozás mikrovezérlő segítségével Budai Tamás budai.tamas@sze.hu http://maxwell.sze.hu/~budait Tartalom Mikrovezérlőkről röviden Programozási alapismeretek ismétlés
Digitális rendszerek. Digitális logika szintje
 Digitális rendszerek Digitális logika szintje CPU lapkák Mai modern CPU-k egy lapkán helyezkednek el Kapcsolat a külvilággal: kivezetéseken (lábak) keresztül Cím, adat és vezérlőjelek, ill. sínek (buszok)
Digitális rendszerek Digitális logika szintje CPU lapkák Mai modern CPU-k egy lapkán helyezkednek el Kapcsolat a külvilággal: kivezetéseken (lábak) keresztül Cím, adat és vezérlőjelek, ill. sínek (buszok)
Bevezetés a mikrovezérlők programozásába: Az Arduino, mint logikai analizátor
 Bevezetés a mikrovezérlők programozásába: Az Arduino, mint logikai analizátor 1 Hasznos eszközök hibakereséshez Logikai áramkörök Logikai teszter Analóg áramkörök Voltmérő Logikai analizátor Oszcilloszkóp
Bevezetés a mikrovezérlők programozásába: Az Arduino, mint logikai analizátor 1 Hasznos eszközök hibakereséshez Logikai áramkörök Logikai teszter Analóg áramkörök Voltmérő Logikai analizátor Oszcilloszkóp
Occam 1. Készítette: Szabó Éva
 Occam 1. Készítette: Szabó Éva Párhuzamos programozás Egyes folyamatok (processzek) párhuzamosan futnak. Több processzor -> tényleges párhuzamosság Egy processzor -> Időosztásos szimuláció Folyamatok közötti
Occam 1. Készítette: Szabó Éva Párhuzamos programozás Egyes folyamatok (processzek) párhuzamosan futnak. Több processzor -> tényleges párhuzamosság Egy processzor -> Időosztásos szimuláció Folyamatok közötti
SZENZORMODUL ILLESZTÉSE LEGO NXT PLATFORMHOZ. Készítette: Horváth András MSc Önálló laboratórium 2 Konzulens: Orosz György
 SZENZORMODUL ILLESZTÉSE LEGO NXT PLATFORMHOZ Készítette: Horváth András MSc Önálló laboratórium 2 Konzulens: Orosz György BEVEZETÉS Simonyi Károly szakkollégium LEGO és robotika kör NXT Cél: Választott
SZENZORMODUL ILLESZTÉSE LEGO NXT PLATFORMHOZ Készítette: Horváth András MSc Önálló laboratórium 2 Konzulens: Orosz György BEVEZETÉS Simonyi Károly szakkollégium LEGO és robotika kör NXT Cél: Választott
Készítette: X. Y. 12.F. Konzulens tanár: W. Z.
 TÁVVEZÉRLÉS SOROS KOMMUNKÁCIÓVAL ESZKÖZÖKÖN Készítette: X. Y. 12.F Konzulens tanár: W. Z. I. Cél: A MESTER robot mozgatáskor compass modul segítségével kiszámítja, hány fokot fordult el előző helyzetéhez
TÁVVEZÉRLÉS SOROS KOMMUNKÁCIÓVAL ESZKÖZÖKÖN Készítette: X. Y. 12.F Konzulens tanár: W. Z. I. Cél: A MESTER robot mozgatáskor compass modul segítségével kiszámítja, hány fokot fordult el előző helyzetéhez
A Számítógépek hardver elemei
 Mechatronika, Optika és Gépészeti Informatika Tanszék Kovács Endre tud. Mts. A Számítógépek hardver elemei Korszerű perifériák és rendszercsatolásuk A µ processzoros rendszer regiszter modellje A µp gépi
Mechatronika, Optika és Gépészeti Informatika Tanszék Kovács Endre tud. Mts. A Számítógépek hardver elemei Korszerű perifériák és rendszercsatolásuk A µ processzoros rendszer regiszter modellje A µp gépi
Karakteres LCD kijelző használata MiniRISC processzoron
 Karakteres LCD kijelző használata MiniRISC processzoron F1. A MiniRISC processzor rendelkezik általános célú adat be-/kimeneti (GPIO) interfészekkel. Ezek az interfészek rugalmasan használhatók szinte
Karakteres LCD kijelző használata MiniRISC processzoron F1. A MiniRISC processzor rendelkezik általános célú adat be-/kimeneti (GPIO) interfészekkel. Ezek az interfészek rugalmasan használhatók szinte
Programozható vezérlő rendszerek KOMMUNIKÁCIÓS HÁLÓZATOK 2.
 KOMMUNIKÁCIÓS HÁLÓZATOK 2. CAN busz - Autóipari alkalmazásokhoz fejlesztették a 80-as években - Elsőként a BOSCH vállalat fejlesztette - 1993-ban szabvány (ISO 11898: 1993) - Később fokozatosan az iparban
KOMMUNIKÁCIÓS HÁLÓZATOK 2. CAN busz - Autóipari alkalmazásokhoz fejlesztették a 80-as években - Elsőként a BOSCH vállalat fejlesztette - 1993-ban szabvány (ISO 11898: 1993) - Később fokozatosan az iparban
ARM programozás. Iványi László Szabó Béla
 ARM programozás 4. Óra USART periféria és az RS-485 busz elmélete és használata Iványi László ivanyi.laszlo@stud.uni-obuda.hu Szabó Béla szabo.bela@stud.uni-obuda.hu Mi az USART/UART? USART => Universal
ARM programozás 4. Óra USART periféria és az RS-485 busz elmélete és használata Iványi László ivanyi.laszlo@stud.uni-obuda.hu Szabó Béla szabo.bela@stud.uni-obuda.hu Mi az USART/UART? USART => Universal
T Bird 2. AVR fejlesztőpanel. Használati utasítás. Gyártja: BioDigit Kft. Forgalmazza: HEStore.hu webáruház. BioDigit Kft, 2012. Minden jog fenntartva
 T Bird 2 AVR fejlesztőpanel Használati utasítás Gyártja: BioDigit Kft Forgalmazza: HEStore.hu webáruház BioDigit Kft, 2012 Minden jog fenntartva Főbb tulajdonságok ATMEL AVR Atmega128 típusú mikrovezérlő
T Bird 2 AVR fejlesztőpanel Használati utasítás Gyártja: BioDigit Kft Forgalmazza: HEStore.hu webáruház BioDigit Kft, 2012 Minden jog fenntartva Főbb tulajdonságok ATMEL AVR Atmega128 típusú mikrovezérlő
MSP430 programozás Energia környezetben. Szervó motorok vezérlése
 MSP430 programozás Energia környezetben Szervó motorok vezérlése 1 Szervo motorok Felépítés Jelalak 2 Servo programkönyvtár A gyári Servo programkönyvtár max. 8 db szervót kezel, s ezekhez felhasználja
MSP430 programozás Energia környezetben Szervó motorok vezérlése 1 Szervo motorok Felépítés Jelalak 2 Servo programkönyvtár A gyári Servo programkönyvtár max. 8 db szervót kezel, s ezekhez felhasználja
Számítógép Architektúrák
 Perifériakezelés a PCI-ban és a PCI Express-ben Horváth Gábor 2017. február 14. Budapest docens BME Hálózati Rendszerek és Szolgáltatások Tanszék ghorvath@hit.bme.hu A PCI PCI = Peripheral Component Interfész,
Perifériakezelés a PCI-ban és a PCI Express-ben Horváth Gábor 2017. február 14. Budapest docens BME Hálózati Rendszerek és Szolgáltatások Tanszék ghorvath@hit.bme.hu A PCI PCI = Peripheral Component Interfész,
Budapesti Műszaki- és Gazdaságtudományi Egyetem Villamosmérnöki és Informatikai Kar MIT. Nagyteljesítményű mikrovezérlők tantárgy [vimim342]
![Budapesti Műszaki- és Gazdaságtudományi Egyetem Villamosmérnöki és Informatikai Kar MIT. Nagyteljesítményű mikrovezérlők tantárgy [vimim342]](/thumbs/39/18932349.jpg "Budapesti Műszaki- és Gazdaságtudományi Egyetem Villamosmérnöki és Informatikai Kar MIT. Nagyteljesítményű mikrovezérlők tantárgy [vimim342]") Budapesti Műszaki- és Gazdaságtudományi Egyetem Villamosmérnöki és Informatikai Kar MIT Nagyteljesítményű mikrovezérlők tantárgy [vimim342] 8x8x8 LED Cube Készítette: Szikra István URLJRN Tartalomjegyzék
Budapesti Műszaki- és Gazdaságtudományi Egyetem Villamosmérnöki és Informatikai Kar MIT Nagyteljesítményű mikrovezérlők tantárgy [vimim342] 8x8x8 LED Cube Készítette: Szikra István URLJRN Tartalomjegyzék
A Memory Interface Generator (MIG) beállítása a Logsys Kintex-7 FPGA kártyához
 beállítása a Logsys Kintex-7 FPGA kártyához") A Memory Interface Generator (MIG) beállítása a Logsys Kintex-7 FPGA kártyához Ellenőrizzük a projektből importált adatokat. Ha rendben vannak, akkor kattintsunk a Next gombra. Válasszuk a Create Design
A Memory Interface Generator (MIG) beállítása a Logsys Kintex-7 FPGA kártyához Ellenőrizzük a projektből importált adatokat. Ha rendben vannak, akkor kattintsunk a Next gombra. Válasszuk a Create Design
Dr. Oniga István DIGITÁLIS TECHNIKA 8
 Dr. Oniga István DIGITÁLIS TECHNIA 8 Szekvenciális (sorrendi) hálózatok Szekvenciális hálózatok fogalma Tárolók RS tárolók tárolók T és D típusú tárolók Számlálók Szinkron számlálók Aszinkron számlálók
Dr. Oniga István DIGITÁLIS TECHNIA 8 Szekvenciális (sorrendi) hálózatok Szekvenciális hálózatok fogalma Tárolók RS tárolók tárolók T és D típusú tárolók Számlálók Szinkron számlálók Aszinkron számlálók
AF 4073-1. 5 hangú kód adó-vevő. Fő jellemzők:
 AF 4073-1 5 hangú kód adó-vevő Fő jellemzők: SELECT 5 jelzések küldése - billentyüzeten beirt 5 hangú szekvencia küldése - szekvencia küldés 9 db programozható hivó-memória egyikéből - REDIAL funkció egy
AF 4073-1 5 hangú kód adó-vevő Fő jellemzők: SELECT 5 jelzések küldése - billentyüzeten beirt 5 hangú szekvencia küldése - szekvencia küldés 9 db programozható hivó-memória egyikéből - REDIAL funkció egy
Multi-20 modul. Felhasználói dokumentáció 1.1. Készítette: Parrag László. Jóváhagyta: Rubin Informatikai Zrt.
 Multi-20 modul Felhasználói dokumentáció. Készítette: Parrag László Jóváhagyta: Rubin Informatikai Zrt. 49 Budapest, Egressy út 7-2. telefon: +36 469 4020; fax: +36 469 4029 e-mail: info@rubin.hu; web:
Multi-20 modul Felhasználói dokumentáció. Készítette: Parrag László Jóváhagyta: Rubin Informatikai Zrt. 49 Budapest, Egressy út 7-2. telefon: +36 469 4020; fax: +36 469 4029 e-mail: info@rubin.hu; web:
Tisztelt Telepítő! 2. Ellenőrizze, hogy a modul engedélyezve van-e: Szekció [382] Opció 5 (alternatív kommunikátor) BE.
![Tisztelt Telepítő! 2. Ellenőrizze, hogy a modul engedélyezve van-e: Szekció [382] Opció 5 (alternatív kommunikátor) BE.](/thumbs/27/9743189.jpg "Tisztelt Telepítő! 2. Ellenőrizze, hogy a modul engedélyezve van-e: Szekció [382] Opció 5 (alternatív kommunikátor) BE.") Tisztelt Telepítő! A PowerSeries NEO GO alkalmazás segítségével távolról vezérelhetőek a NEO központok. Ehhez a központokat valamely TL280/TL2803G/3G2080 modullal kell bővíteni. A modul verziószámának
Tisztelt Telepítő! A PowerSeries NEO GO alkalmazás segítségével távolról vezérelhetőek a NEO központok. Ehhez a központokat valamely TL280/TL2803G/3G2080 modullal kell bővíteni. A modul verziószámának
GSM kapunyitó modul G4-190
 GSM kapunyitó modul G4-190 Egyszerű kapunyitó modul, időzíthető felhasználói engedélyezéssel, kapucsengő funkció vagy végállás kapcsoló átjelzéssel, maximum 190 szám kezeléssel. Ezt a leírást olvassa végig,
GSM kapunyitó modul G4-190 Egyszerű kapunyitó modul, időzíthető felhasználói engedélyezéssel, kapucsengő funkció vagy végállás kapcsoló átjelzéssel, maximum 190 szám kezeléssel. Ezt a leírást olvassa végig,
Tisztelt Telepítő! A központ és az alkalmazás összehangolását a következőképpen hajthatja végre:
 Tisztelt Telepítő! A PowerSeries NEO GO alkalmazás segítségével távolról vezérelhetőek a NEO központok. Ehhez a központokat valamely TL280/TL2803G/3G2080 modullal kell bővíteni. A leírás a v5.x modul verziókhoz
Tisztelt Telepítő! A PowerSeries NEO GO alkalmazás segítségével távolról vezérelhetőek a NEO központok. Ehhez a központokat valamely TL280/TL2803G/3G2080 modullal kell bővíteni. A leírás a v5.x modul verziókhoz
Autóipari beágyazott rendszerek CAN hardver
 Scherer Balázs, Tóth Csaba: Autóipari beágyazott rendszerek CAN hardver Előadásvázlat Kézirat Csak belső használatra! 2012.02.19. SchB, TCs BME MIT 2012. Csak belső használatra! Autóipari beágyazott rendszerek
Scherer Balázs, Tóth Csaba: Autóipari beágyazott rendszerek CAN hardver Előadásvázlat Kézirat Csak belső használatra! 2012.02.19. SchB, TCs BME MIT 2012. Csak belső használatra! Autóipari beágyazott rendszerek
Nagy Gergely április 4.
 Mikrovezérlők Nagy Gergely BME EET 2012. április 4. ebook ready 1 Bevezetés Áttekintés Az elektronikai tervezés eszközei Mikroprocesszorok 2 A mikrovezérlők 3 Főbb gyártók Áttekintés A mikrovezérlők az
Mikrovezérlők Nagy Gergely BME EET 2012. április 4. ebook ready 1 Bevezetés Áttekintés Az elektronikai tervezés eszközei Mikroprocesszorok 2 A mikrovezérlők 3 Főbb gyártók Áttekintés A mikrovezérlők az
Labor gyakorlat Mikrovezérlők
 Labor gyakorlat Mikrovezérlők ATMEL AVR ARDUINO 1. ELŐADÁS BUDAI TAMÁS Tartalom Mikrovezérlők Mikrovezérlők felépítése, működése Mikrovezérlő típusok, gyártók Mikrovezérlők perifériái Mikrovezérlők programozása
Labor gyakorlat Mikrovezérlők ATMEL AVR ARDUINO 1. ELŐADÁS BUDAI TAMÁS Tartalom Mikrovezérlők Mikrovezérlők felépítése, működése Mikrovezérlő típusok, gyártók Mikrovezérlők perifériái Mikrovezérlők programozása
The modular mitmót system. 433, 868MHz-es ISM sávú rádiós kártya
 The modular mitmót system 433, 868MHz-es ISM sávú rádiós kártya Kártyakód: COM-R4-S-b Fejlesztői dokumentáció Dokumentációkód: -Da Budapesti Műszaki és Gazdaságtudományi Egyetem Méréstechnika és Információs
The modular mitmót system 433, 868MHz-es ISM sávú rádiós kártya Kártyakód: COM-R4-S-b Fejlesztői dokumentáció Dokumentációkód: -Da Budapesti Műszaki és Gazdaságtudományi Egyetem Méréstechnika és Információs
Digitális technika (VIMIAA01) Laboratórium 10
 Laboratórium 10") BUDAPESTI MŰSZAKI ÉS GAZDASÁGTUDOMÁNYI EGYETEM VILLAMOSMÉRNÖKI ÉS INFORMATIKAI KAR MÉRÉSTECHNIKA ÉS INFORMÁCIÓS RENDSZEREK TANSZÉK Digitális technika (VIMIAA01) Laboratórium 10 Fehér Béla Raikovich Tamás,
BUDAPESTI MŰSZAKI ÉS GAZDASÁGTUDOMÁNYI EGYETEM VILLAMOSMÉRNÖKI ÉS INFORMATIKAI KAR MÉRÉSTECHNIKA ÉS INFORMÁCIÓS RENDSZEREK TANSZÉK Digitális technika (VIMIAA01) Laboratórium 10 Fehér Béla Raikovich Tamás,
Újrakonfigurálható eszközök
 Újrakonfigurálható eszközök 15. Cypress PSOC 5LP DMA adatátvitel Hobbielektronika csoport 2017/2018 1 Debreceni Megtestesülés Plébánia Felhasznált irodalom és segédanyagok Cypress: CY8C58LP FamilyDatasheet
Újrakonfigurálható eszközök 15. Cypress PSOC 5LP DMA adatátvitel Hobbielektronika csoport 2017/2018 1 Debreceni Megtestesülés Plébánia Felhasznált irodalom és segédanyagok Cypress: CY8C58LP FamilyDatasheet
A/D és D/A konverterek vezérlése számítógéppel
 11. Laboratóriumi gyakorlat A/D és D/A konverterek vezérlése számítógéppel 1. A gyakorlat célja: Az ADC0804 és a DAC08 konverterek ismertetése, bekötése, néhány felhasználási lehetőség tanulmányozása,
11. Laboratóriumi gyakorlat A/D és D/A konverterek vezérlése számítógéppel 1. A gyakorlat célja: Az ADC0804 és a DAC08 konverterek ismertetése, bekötése, néhány felhasználási lehetőség tanulmányozása,
Dr. Oniga István DIGITÁLIS TECHNIKA 9
 r. Oniga István IGITÁLIS TEHNIKA 9 Regiszterek A regiszterek több bites tárolók hálózata S-R, J-K,, vagy kapuzott tárolókból készülnek Fontosabb alkalmazások: adatok tárolása és adatmozgatás Funkcióik:
r. Oniga István IGITÁLIS TEHNIKA 9 Regiszterek A regiszterek több bites tárolók hálózata S-R, J-K,, vagy kapuzott tárolókból készülnek Fontosabb alkalmazások: adatok tárolása és adatmozgatás Funkcióik:
Laboratóriumi műszerek megvalósítása ARM alapú mikrovezérlővel és Linux-szal
 Laboratóriumi műszerek megvalósítása ARM alapú mikrovezérlővel és Linux-szal Fuszenecker Róbert Budapesti Műszaki Főiskola Kandó Kálmán Műszaki Főiskolai Kar 2007. október 17. Laboratóriumi berendezések
Laboratóriumi műszerek megvalósítása ARM alapú mikrovezérlővel és Linux-szal Fuszenecker Róbert Budapesti Műszaki Főiskola Kandó Kálmán Műszaki Főiskolai Kar 2007. október 17. Laboratóriumi berendezések
7.hét: A sorrendi hálózatok elemei II.
 7.hét: A sorrendi hálózatok elemei II. Tárolók Bevezetés Bevezetés Regiszterek Számlálók Memóriák Regiszter DEFINÍCIÓ Tárolóegységek összekapcsolásával, egyszerű bemeneti kombinációs hálózattal kiegészítve
7.hét: A sorrendi hálózatok elemei II. Tárolók Bevezetés Bevezetés Regiszterek Számlálók Memóriák Regiszter DEFINÍCIÓ Tárolóegységek összekapcsolásával, egyszerű bemeneti kombinációs hálózattal kiegészítve
SIOUX-RELÉ. Sioux relé modul telepítési leírás Szerkesztés MACIE0191
 SIOUX-RELÉ Sioux relé modul telepítési leírás Szerkesztés 1.2 20MACIE0191 1 Leírás 1.1 Leírás A Sioux-relé egy soros modul, amely tartalmaz egy master kártyát, amely maximum két slave kártyával bővíthető.
SIOUX-RELÉ Sioux relé modul telepítési leírás Szerkesztés 1.2 20MACIE0191 1 Leírás 1.1 Leírás A Sioux-relé egy soros modul, amely tartalmaz egy master kártyát, amely maximum két slave kártyával bővíthető.
Digitális technika (VIMIAA02) Laboratórium 12
 Laboratórium 12") BUDAPESTI MŰSZAKI ÉS GAZDASÁGTUDOMÁNYI EGYETEM VILLAMOSMÉRNÖKI ÉS INFORMATIKAI KAR MÉRÉSTECHNIKA ÉS INFORMÁCIÓS RENDSZEREK TANSZÉK Digitális technika (VIMIAA02) Laboratórium 12 Fehér Béla Raikovich Tamás,
BUDAPESTI MŰSZAKI ÉS GAZDASÁGTUDOMÁNYI EGYETEM VILLAMOSMÉRNÖKI ÉS INFORMATIKAI KAR MÉRÉSTECHNIKA ÉS INFORMÁCIÓS RENDSZEREK TANSZÉK Digitális technika (VIMIAA02) Laboratórium 12 Fehér Béla Raikovich Tamás,
Digitális technika (VIMIAA02) Laboratórium 12
 Laboratórium 12") BUDAPESTI MŰSZAKI ÉS GAZDASÁGTUDOMÁNYI EGYETEM VILLAMOSMÉRNÖKI ÉS INFORMATIKAI KAR MÉRÉSTECHNIKA ÉS INFORMÁCIÓS RENDSZEREK TANSZÉK Digitális technika (VIMIAA02) Laboratórium 12 Fehér Béla Raikovich Tamás,
BUDAPESTI MŰSZAKI ÉS GAZDASÁGTUDOMÁNYI EGYETEM VILLAMOSMÉRNÖKI ÉS INFORMATIKAI KAR MÉRÉSTECHNIKA ÉS INFORMÁCIÓS RENDSZEREK TANSZÉK Digitális technika (VIMIAA02) Laboratórium 12 Fehér Béla Raikovich Tamás,
Programozás és Digitális technika I. Pógár István eng.unideb.hu/pogari
 Programozás és Digitális technika I. Pógár István pogari@eng.unideb.hu eng.unideb.hu/pogari Ajánlott irodalom Massimo Banzi Getting Started with Arduino Michael Margolis Make an Android Controlled Robot
Programozás és Digitális technika I. Pógár István pogari@eng.unideb.hu eng.unideb.hu/pogari Ajánlott irodalom Massimo Banzi Getting Started with Arduino Michael Margolis Make an Android Controlled Robot