Robotkommunikáció 1. rész
|
|
|
- Bertalan Szőke
- 10 évvel ezelőtt
- Látták:
Átírás
1 Barna Zsombor, Kiss Ádám Robotkommunikáció 1. rész BEVEZETŐ ÉS PROJEKTSPECIFIKÁCIÓ A kommunikáció az információcsere folyamata. Minden olyan eseményt tekintsünk kommunikációnak, amelyben valamely dolog (adó) kibocsát egy jelet, amelyre egy másik dolog (vevő) valamilyen válaszfolyamattal reagál. Az állatvilágban is megfigyelhető a kommunikáció számos formája. A különböző fajok nagyon eltérő jelrendszert használnak a kommunikációjuk során. Ez lehet hang, szín, illat, mozgás, Az emberi kommunikációnak is nagyon sok formája és közege létezik. Információt hordozhat pl.: a hangsúly, a mimika, a mozgás. Az informatika alapvetően a kommunikációra épül, akár hálózati számítógépek közötti kommunikációról van szó, akár egyetlen számítógép különböző hardver vagy szoftver eszközeiről. A számítástechnika fejlődése maga után vonta a robotika megjelenését és fejlődését is. Az 1960-as évek elejétől beszélhetünk mobil- illetve ipari robotokról. Ettől kezdve felgyorsult a robotika fejlődése. Bár a science fiction irodalomban vázolt intelligens robotok megjelenésétől még távol vagyunk, de a mesterséges intelligencia kutatásnak már vannak eredményei. A robotok közötti kommunikáció pedig korlátlan lehetőségeket biztosít. A projektünkben a robotkommunikációnak egy evolúcióját mutatjuk be abban az értelemben, hogy egyre összetettebb, bonyolultabb kommunikációs technikát használunk. Eszközként a MINDSTORMS NXT robotokat alkalmazzuk, amelyek rendelkeznek beépített bluetooth alapú adó-vevővel. Tehát a kommunikációs csatornaként rádióhullámokat használunk. A Mindtsorms NXT robotok kommunikációjának technikai részleteit röviden bemutatjuk, hogy a további specifikáció érthető legyen. Összesen négy NXT minikomputer kapcsolható össze alapesetben bluetooth-on hálózattá. Ezek közül az egyiknek kitüntetett szerepe van, ez a master robot, a többi a slave. A slave robotok csak a masteren keresztül küldhetnek üzeneteket egymásnak (az üzenet lehet szám, szöveg, vagy logikai érték). A kapcsolat létrehozása során a master roboton meg kell adni az adott slave melyik kommunikációs csatornára kapcsolódik (1-es, 2- es, vagy 3-as). Minden minikomputer tartalmaz 10 db mailboxot, amelyek puffer jellegű tárolók, a küldött adatok tárolására. Tehát egy robot 10 különböző értéket tud egyszerre kommunikációs szempontból tárolni (a puffer kiürítésével ezek a tárolók újra használhatók). Az információküldés során az adat a pufferbe kerül, a tényleges továbbítás még nem történik meg. Az olvasási művelet során kerül át az adat az egyik robotról a másikra, így minden robot lehet master és slave is, hiszen nincs szükség többletpufferekre. 1.a alprojekt Egyirányú kommunikáció. A konstrukció két NXT minikomputert tartalmaz. Az egyik egy egyszerű lánctalpas jármű, amely mozgását két szervo motor biztosítja, mindkét lánctalpnál egy-egy. A másik egy távirányító, amely szintén két szervo motort tartalmaz. Ezekre a motorokra szerelt karok elfordításával lehet a járművet irányítani. A távvezérlő botkormányának elfordulási szögét küldi át a robot bluetooth-on a járműnek, amely az elfordulási szög nagyságát használja fel a motor sebességeként. A két botkormány vezérli 1

2 tehát a két motort, mindkettő egyet-egyet. Pl.: a távvezérlő bal oldali botkormányának 80o-kal történő elfordítása a jármű bal oldali motorjának 80-as sebességű forgását fogja jelenteni (maximum: 100). Az ellentétes irányú mozgást egy-egy vezérlő gomb (touch szenzor) szabályozza. Ennek megnyomására a távvezérlő megváltoztatja a mért elfordulási szög előjelét, így a negatív szög ellentétes forgásirányt eredményez. A jármű nem küld vissza adatokat, csak fogadja és végrehajtja a távvezérlő jeleit, így a kommunikáció egyirányú. Távirányító Lánctalpas jármű 1.b alprojekt Kétirányú, különböző csatornás kommunikáció. Az 1a alprojektben bemutatott távirányítási módszer csak abban az esetben működik, ha robot belátható helyen van, hiszen a távirányítót ember kezeli és a vizuális információi alapján adja ki az utasításokat. A beláthatóság kritériuma könnyen mellőzhető. Ha a robotra egy kamerát helyezünk, amely a képet folyamatosan közvetíti pl. egy számítógépre, akkor nem szükséges, hogy közvetlen rálátás nyíljon a robotra. A kommunikáció csak látszólagosan vált a robotok szempontjából kétirányúvá, hiszen a wireless kamera képét nem a robot továbbítja, ő csak hordozóként vesz részt a visszafelé irányuló kommunikációban. A vezérlő utasításokat továbbra is a távvezérlőn keresztül kapja a robot, kiegészítve egy harmadik motorral, amely a kamera körbeforgatását teszi lehetővé. Wireless kamera Kamerával felszerelt robot A kommunikáció tehát kétirányú ugyan, de a két irány különböző csatornán zajlik (wireless és bluetooth). A konstrukció jól használható olyan helyeken, ahová az akadályok miatt az ember nem képes bejutni. A konstrukciók és a programok részletes leírása a későbbiekben. 2

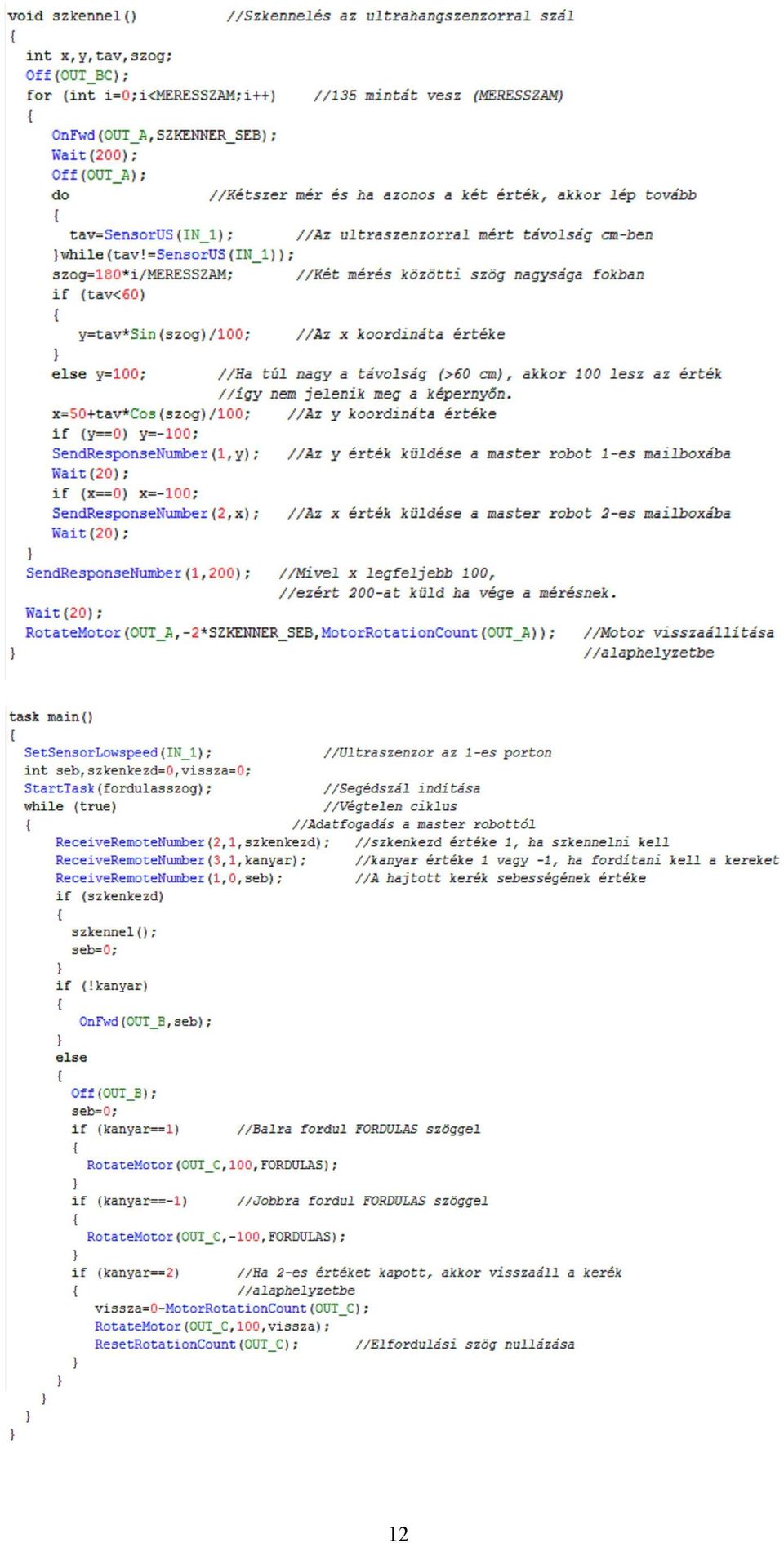
3 2. alprojekt Kétirányú, azonos csatornás kommunikáció. A wireless kamera jelét nem képes a robot továbbítani a bluetooth technológia átviteli sebessége miatt. A tényleges kétirányú kommunikációhoz nem kameraképet sugárzunk, hanem ultrahangos távolságérzékelővel mért távolságadatokat. Tehát a robotot továbbra is egy távirányító vezérli, de járműre szerelt ultrahangszenzor képes 180 o -os látószöggel szkennelni a környezetét. Az így mért távolságértékeket bluetooth-on visszaküldi a távvezérlőnek, amely LCD képernyőjén megjeleníti a radarjeleket (miután a polár-koordinátákat descartes-koordinátákká transzformálja). Most már valódi kétirányú kommunikációról van szó, hiszen a robotok odavissza ugyanazon a csatornán cserélnek információt. A radarkép alapján a távvezérlőt még mindig egy ember irányítja. A kamerás megoldáshoz képest az előny, hogy a használt ultrahang technológia miatt nincs szükség fényre a környezet észleléséhez, így sötétben is teljes hatékonysággal működik. Az elkészített járműkonstrukció lényegesen bonyolultabb, mint a korábbiak. Két hajtott és két pár forduló kerékkel rendelkezik. A hajtott kerekek differenciálműhöz csatlakoznak, míg a forduló kerekek felfüggesztése mozgatható és rugalmas, valamint az első illetve hátsó kerékpár szinkronban, de ellentétesen fordul. A konstrukció és a programok részletes leírása a későbbiekben. Távirányító Radaros jármű 3
.")
4 3. alprojekt (lásd: Robotkommunikáció 2. rész) Autonóm robotkommunikáció. Amennyiben a kommunikációs folyamatból az emberi tényezőt is ki szeretnénk zárni, akkor olyan információ feldolgozó programot kellene írni az előző alprojektben bemutatott konstrukcióhoz, amely meghaladja az NXT minikomputer lehetőségeit, hiszen a beérkező radarjelek feldolgozását a minikomputernek kellene önállóan elvégezni. Így egy másik példán keresztül szemléltetjük a folyamatot. Az elmúlt évi Szabadfogású számítógép versenyen már bemutatott robotkéz konstrukció egy lényegesen továbbfejlesztett változatát készítettük el. Elkészült két kéz, egy jobb és egy bal. A két kéz a közismert kő-papír-olló játékot játszza egymással, emberi beavatkozás nélkül. Mindkét kéz két-két NXT minikomputert tartalmaz, és a teljes játékot egy különálló egység vezérli (automatikusan). Összesen 5 db NXT tégla kommunikál egymással. Azért, hogy az emberi tevékenységet ne zárjuk ki teljesen, a konstrukciót kiegészítettük egy fogadó egységgel, amelyen keresztül téteket lehet feltenni arra, hogy melyik kéz nyeri a játékot. A játék látványos, és helyenként intelligensnek tűnő módon viselkednek a kezek, hiszen egymás információira reagálnak, de a háttérben a véletlenszám előállítás dominál, amelyre egyszerű döntési algoritmusok épülnek. Ezeknek a döntési algoritmusoknak a mesterséges intelligencia előállítása szempontjából is nagy szerepük van, hiszen az emberi irányítási folyamat nagy része is ezen alapul (információk alapján a cél érdekében döntéseket hozni). A konstrukciós és programozási részletek a továbbiakban olvashatók. A KONSTRUKCIÓK (HARDVER) BEMUTATÁSA Mint az előbbiekben mát leírtuk, három pályamunkánkkal neveztünk mellyel a robotok közötti kommunikáció különböző rétegeit mutatjuk be. Az alábbiakban a konstrukciókról esik néhány szó. 1.a és 1.b alprojekt konstrukciói. Ebben az esetben megpróbáltuk a legminimálisabb szintre szorítani a robot felépítésének komplexitását. (Occam borotvája vagy Murphy törvénye: Ami elromolhat, az el is romlik.) A jármű robot két lánctalpból, ezeket meghajtó két motorból, valamit egy intelligens NXT mini komputerből áll. Kiegészítésként rászereltünk egy 360 fokban körbeforgatható forgózsámolyt, melyre egy wireless mini videokamerát erősítettünk (1.b alprojekt). A kommunikáció mikéntje ezzel nem változott, azonban erről majd a későbbiekben. A forgózsámoly meghajtásáért egy, az alatta elhelyezett motor felel, melytől a meghajtás egy 90 fokban elfordított áttétel segítségével jut el a forgózsámolyig. A lánctalpak meghajtása 4

5 annyiban egyszerűbb, hogy itt a motorok közvetlenül a lánctalp csillagkerekeinek tengelyeihez csatlakoznak, minden áttétel nélkül. Többek közt ez adja a robot nagyfokú mozgékonyságát. A robot hátrányai közé tartozik aszimmetrikus felépítése mely megnehezíti az irányíthatóságot. És most essen pár szó a távvezérlőről is. A konstrukció itt is szinte minimalista kivitelben készült el. A távvezérlő két oldalán található karok a sebességváltoztatást szolgálják oldalhelyesen (a távvezérlő jobb karja a robot jobb oldali motorját vezérli). A motorok alatt elhelyezésre került két nyomógomb, amelyek az irányváltásért felelősek. Mintha a robotot fékezés nélkül hátramenetbe kapcsolnánk. A tégla középen helyezkedik el, ezzel elősegítve a kényelmesebb fogást és a súlyponti stabilizációt. A forgózsámolyt vezérlő motor a távvezérlő elülső felén, középen található, jobbra fordításánál a kamera jobbra kezd el forogni és fordítva. A robot alkalmas, ember számára nem megközelíthető helyek felderítésére. Azonban túlságosan egyenetlen terepen való mozgásra magas súlypontja miatt nem használható. A robot továbbfejleszthető egy elülső és egy hátulsó traktussal, melyek segítségével a lejtők megmászására is alkalmassá lehetne tenni. Ezen kívül a távvezérlőn kényelmesebb fogást lehetne kialakítani. 2. alprojekt konstrukció. A következő robotunk a kétirányú kommunikációt szemlélteti. A robot felépítése ebben az esetben inkább egy közúti járműre emlékeztet. Középső kerékpárja hajtott, valamit ez rendelkezik felfüggesztésekkel. Az elülső és hátsó kerékpárok az alap (párhuzamos) állapothoz képest mindkét irányban fokot képesek kitérni. A jármű a megszokott két fordulókerék helyett néggyel rendelkezik, így a fordulókör jóval lecsökken, ennek köszönhetően a robot meglepően kis helyen, akár egy 30 cm átmérőjű körben képes megfordulni. Azonban a fordulókerékkel rendelkező járművek egyik problémája itt is kiütközött, miszerint a körön forduló járműveknél a külső íven forduló kerekeknek gyorsabban kell fordulniuk, mint a belsőknek. A merev tengelyű járművek erre nem képesek, viszont ha megszakítjuk, az összeköttetést a kerekek között, egy motorral nem lehet őket meghajtani, így egy az életnagyságú járműveknél bevált megoldáshoz folyamodtunk és beépítettünk egy differenciálművet. Mint a neve mutatja, ez a szerkezet kiegyenlíti a különbséget a két oldalsó kerék fordulatszáma között, valamit szükség esetén megengedi az eltérést. 5

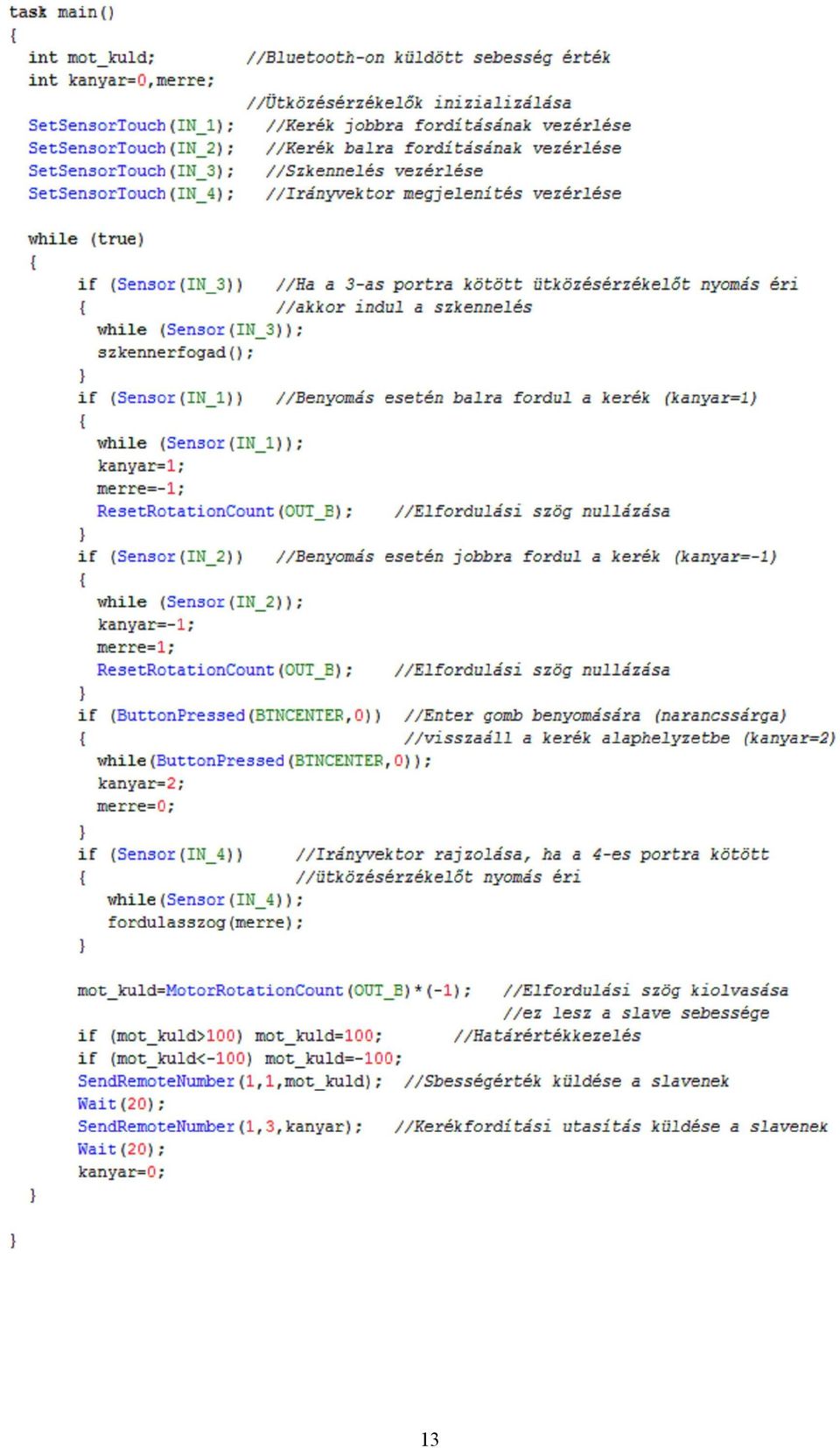
6 A differenciálmű egy fogaskerékbe összeszerelt fogaskerékrendszer, melyen belül a fogaskerekek képesek függetlenül a háztól elfordulni. A képen mindez jól megfigyelhető. A hat kerék közül melyekkel a robot rendelkezik csak kettő hajtott. A maradék négy, úgynevezett szabadon futó kerék, melyeknél így nem lép föl fordulatszám különbség probléma. Ezen 4 kerék tengelyszögének változtatásáért 1 motor felelős. Mivel a robot alváza fölött rögzített tengely fordítja mind a két pár kereket ezért forgásszinkronizációs problémáink sincsenek. A Kerekek ki és befordításáért egy fogaslécsor felelős, míg a tengelyt egy 30-szoros áttételű fogaskerék áttétel forgatja, ezáltal a kerékfordítás esetleges egy fokos hibája egy harmincad fokra csökken. A tégla az alváz fölött nem sokkal helyezkedi el, ezáltal tartva alacsonyan a robot súlypontját, ezzel is erősítve a stabilitást. A stabilitásért felelős még a két középső, hajtott keréken elhelyezett egy centi magasságváltozást tolerálni képes felfüggesztés, valamint, egy a rovarvilágból merített ötlet. A robot középső kerekeinek távolsága nagyobb, mint a másik két párnál. ezáltal is növelve az alátámasztási felületet. A robot csak akkor borul fel, ha a súlypont kimozdul az alátámasztás fölül, azonban mivel a súlypontunk igen alacsonyan van, a robot akár hatvan fokos oldalirányú megdöntés esetén is a kerekeire érkezik vissza. A robot elején elhelyezésre került egy az előző roboton látotthoz hasonló forgózsámoly. Ezúttal azonban kamera helyett egy ultrahangszenzor került rá, mellyel a robot akár sötétben is képes kitapogatni a környezetét. Az áttétel ez esetben is igen nagy, így csökkentve a hibahatárt. Az érzékelő az alvázhoz van rögzítve, így menet közben sem remeg. A robot alváza igen vastag, mivel itt került elhelyezésre a három motorból kettő valamit a differenciálmű. A következőkben essen pár szó a távvezérlőről. A jobb oldalon található kar segítségével a sebesség tetszés szerint növelhető vagy csökkenthető. Azonban az elfordulást két nyomógombbal lehet vezérelni, melyek konstansértékkel fordítják el a kerekeket. A távvezérlőn még két gomb található melyek közül az egyikkel az ultrahangszenzoros mintavételezést lehet elindítani. Mivel a robotot arra terveztük, hogy nem belátható terepen is lehessen irányítani, ezért az ultrahangos letapogatás alapján, a távvezérlő képernyőjére rajzolt kép ugyan tájékoztat a környezeti terepviszonyokról, de ez alapján a robotot csak abban az esetben lehet irányítani, ha fordítás során azt is látjuk a képernyőn, hogy az eleje éppen merre 6

7 néz. Ezért a programba beépítettünk egy olyan pozíciómeghatározó algoritmust, amely képes egy irányvektort mozgatva a képernyőn megjeleníteni a robot aktuális előre irányát. A második nyomógomb ezt a funkciót aktivizálja és jeleníti meg a távvezérlő képernyőjén a vektort. Mindezekkel együtt a távirányító inkább asztalra vagy sima felületre letéve használhatóbb, mintsem kézben tartva, ellentétben az előzőkkel (1.a és 1.b alprojekt távvezérlői). A terepviszonyok és a radarkép, valamint az irányvektor képernyőn megjelenő képe (részletesebb szemléltetés a mellékelt videón). A terepviszonyok. A terepviszonyoknak megfelelő radarkép. Az irányvektor pozíciója a képernyőn (más terepviszonyok mellett). 7
. A terepviszonyok.")
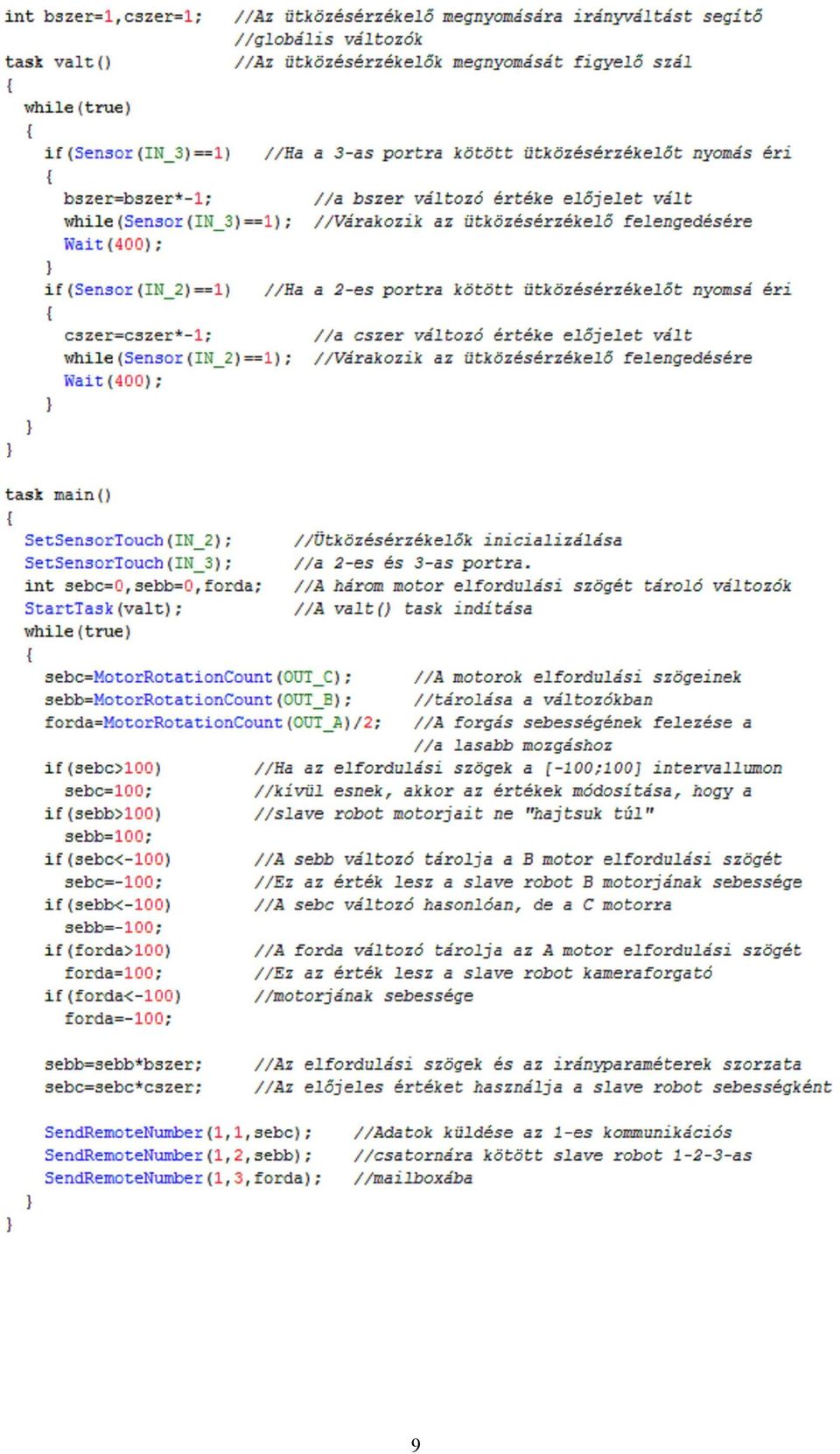
8 A PROGRAMOK (FORRÁSKÓD) BEMUTATÁSA Mivel négy konstrukció készült el a projekt keretei között, ezért a hosszú és részletes bemutatás elkerülése érdekében csak a 3. alprojekthez készült forráskódot mutatjuk be részletesen. Valamennyi forráskódot tartalmazó állomány szerepel a CD mellékleten az egyes utasításokhoz fűzött kommentekkel együtt. A forráskódok Bricx Command Center keretprogrammal készültek. Alapvetően a C nyelvi struktúrájúak. 1.a és 1.b alprojektek forrsákódjai Mindkét esetben két program szükséges a konstrukció működtetéséhez. A master robot a távvezérlő és a kommunikációs kapcsolatban a slave szerepét tölti be a jármű. A távvezérlő programjának elve, hogy a minikomputerhez csatlakoztatott két szervo motor elfordulási szögét olvassuk ki és tároljuk egy-egy változóban. Ezeket az egész értékeket küldi át a master robot bluetooth-on a járműnek, amely a két motorjának sebesség értékeként használja fel a számokat. Minél nagyobb szöggel fordítottuk el a távvezérlő motorjára szerelt botkormányt, annál nagyobb sebességgel forog a jármű adott motorja. A bal oldali szervo elfordulási szögét a jármű bal oldali motorjának sebességparamétereként használjuk, míg a jobb oldalit hasonlóan. Az 1.b alprojektben egy harmadik szervo motort is tartalmaz a konstrukció, amely a járműre szerelt kamerát forgatja. A távvezérlőre is felkerült ennek megfelelően egy harmadik motor, amely az irányítást szabályozza. A különböző irányú mozgásokhoz két különböző elvet használtunk. A motorok mozgatása esetén az irányváltást egy-egy nyomógomb benyomása biztosítja, amely -1-el megszorozza a mért elfordulási szög értékét, így az előjelváltás ellentétes irányú forgatást eredményez. A kamera mozgatásánál az elfordulási szöget eleve előjelesen mérjük, így ott nincs szükség a szorzásra, csupán a kapott érték bluetooth-on keresztüli átküldésére. A távvezérlő program forráskódja (Egyirany_master.nxc): 8

9 9
10 A slave jaármű programjának forráskódja (Egyirany_slave.nxc): 2. alprojekt forrsákódjai A távvezérlő programjának kommentekkel ellátott forráskódja (Ketirany_master.nxc): 10

11 A távvezérlő programjának kommentekkel ellátott forráskódja (Ketirany_slave.nxc): 11

12 12
13 13
14 A projektek elkészítése során használt szoftverek, források Szoftverek Képszerkesztés Video szerkesztés PIP video szerkesztés Wireless képátvitel Programozói szoftverkörnyezet A programírás során felhasznált források Kiss Róbert, Pásztor Attila: Mobil robotok programozása NXC és NXT-G nyelven, Kecskeméti Főiskola GAMF Kar, főiskolai jegyzet, 2009 Kiss Róbert, Badó Zsolt: Egyszerű robotika A Mindstorms NXT robotok programozásának alapjai, National Instruments Hungary, elektronikus könyv, 2010 Dave Baum: NQC Programmer's Guide, elektronikus könyv, 2003 Doxygen: NXC Version r4, elektronikus könyv,

A LEGO Mindstorms EV3 programozása
 A LEGO Mindstorms EV3 programozása 1. A fejlesztői környezet bemutatása 12. Az MPU6050 gyorsulás- és szögsebességmérő szenzor Orosz Péter 1 Felhasznált irodalom LEGO MINDSTORMS EV3: Felhasználói útmutató
A LEGO Mindstorms EV3 programozása 1. A fejlesztői környezet bemutatása 12. Az MPU6050 gyorsulás- és szögsebességmérő szenzor Orosz Péter 1 Felhasznált irodalom LEGO MINDSTORMS EV3: Felhasználói útmutató
Robotkéz. Évfolyam: 9. Iskola: Bányai Júlia Gimnázium, 6000 Kecskemét, nyíri u. 11. [email protected]
 Robotkéz Készítő: Kiss Ádám Évfolyam: 9. Iskola: Bányai Júlia Gimnázium, 6000 Kecskemét, nyíri u. 11. E-mail: [email protected] A konstrukció általános bemutatása A cél egy olyan robotkonstrukció építése
Robotkéz Készítő: Kiss Ádám Évfolyam: 9. Iskola: Bányai Júlia Gimnázium, 6000 Kecskemét, nyíri u. 11. E-mail: [email protected] A konstrukció általános bemutatása A cél egy olyan robotkonstrukció építése
6000 Kecskemét Nyíri út 11. Telefon: 76/481-474; Fax: 76/486-942 [email protected] www.banyai-kkt.sulinet.hu. Gyakorló feladatok
 BÁNYAI JÚLIA GIMNÁZIUM 6000 Kecskemét Nyíri út 11. Telefon: 76/481-474; Fax: 76/486-942 [email protected] www.banyai-kkt.sulinet.hu Gyakorló feladatok I. LEGO Robotprogramozó országos csapatversenyre A következő
BÁNYAI JÚLIA GIMNÁZIUM 6000 Kecskemét Nyíri út 11. Telefon: 76/481-474; Fax: 76/486-942 [email protected] www.banyai-kkt.sulinet.hu Gyakorló feladatok I. LEGO Robotprogramozó országos csapatversenyre A következő
VERSENYFELHÍVÁS. A verseny célja:
 VERSENYFELHÍVÁS A Hajdúböszörményi Bocskai István Gimnázium, a Kecskeméti Bányai Júlia Gimnázium valamint a Nyugat-magyarországi Egyetem Informatikai és Gazdasági Intézete a Soproni Széchenyi István Gimnáziummal
VERSENYFELHÍVÁS A Hajdúböszörményi Bocskai István Gimnázium, a Kecskeméti Bányai Júlia Gimnázium valamint a Nyugat-magyarországi Egyetem Informatikai és Gazdasági Intézete a Soproni Széchenyi István Gimnáziummal
A B C NXT A B C. Szolga 1. Szolga 3. NXT. Szolga 2.
 12. KOMMUNIKÁCIÓ A robotok a beépített bluetooth technika miatt képesek egymással is kommunikálni. Természetesen más bluetoothos kommunikációra alkalmas eszközzel is, például mobiltelefonnal, PDA-val vagy
12. KOMMUNIKÁCIÓ A robotok a beépített bluetooth technika miatt képesek egymással is kommunikálni. Természetesen más bluetoothos kommunikációra alkalmas eszközzel is, például mobiltelefonnal, PDA-val vagy
Robotkommunikáció 2. rész
 Barna Zsombor, Kiss Ádám Robotkommunikáció 2. rész BEVEZETŐ ÉS PROJEKTSPECIFIKÁCIÓ A kommunikáció az információcsere folyamata. Minden olyan eseményt tekintsünk kommunikációnak, amelyben valamely dolog
Barna Zsombor, Kiss Ádám Robotkommunikáció 2. rész BEVEZETŐ ÉS PROJEKTSPECIFIKÁCIÓ A kommunikáció az információcsere folyamata. Minden olyan eseményt tekintsünk kommunikációnak, amelyben valamely dolog
Korszerű információs technológiák
 MISKOLCI EGYETEM GÉPÉSZMÉRNÖKI ÉS INFORMATIKAI KAR Korszerű információs technológiák LEGO ROBOTOK PROGRAMOZÁSA Tompa Tamás tanársegéd Általános Informatikai Intézeti Tanszék Miskolc, 2018. október 20.
MISKOLCI EGYETEM GÉPÉSZMÉRNÖKI ÉS INFORMATIKAI KAR Korszerű információs technológiák LEGO ROBOTOK PROGRAMOZÁSA Tompa Tamás tanársegéd Általános Informatikai Intézeti Tanszék Miskolc, 2018. október 20.
GD Dollies Műszaki leírás
 GD Dollies Műszaki leírás A szállítóeszköz elektromos működtetésű, rádiós távvezérlésű két kocsiból álló egység, mely páros és szóló üzemmódban egyaránt használható. Elsősorban beltéri ill. üzemi területen
GD Dollies Műszaki leírás A szállítóeszköz elektromos működtetésű, rádiós távvezérlésű két kocsiból álló egység, mely páros és szóló üzemmódban egyaránt használható. Elsősorban beltéri ill. üzemi területen
"Történjen bármi, a vetés mindig kihajt..."
 "Történjen bármi, a vetés mindig kihajt..." Pályázati azonosító: UT-2018-0017 Kutatási projekt címe: Autonóm járművek a mezőgazdaságban Intézmény neve: Csukás Zoltán Mezőgazdasági Szakgimnázium és Szakközépiskola
"Történjen bármi, a vetés mindig kihajt..." Pályázati azonosító: UT-2018-0017 Kutatási projekt címe: Autonóm járművek a mezőgazdaságban Intézmény neve: Csukás Zoltán Mezőgazdasági Szakgimnázium és Szakközépiskola
BEÁGYAZOTT RENDSZEREK TERVEZÉSE UDP csomag küldése és fogadása beágyazott rendszerrel példa
 BEÁGYAZOTT RENDSZEREK TERVEZÉSE 1 feladat: A Netburner MOD5270 fejlesztőlap segítségével megvalósítani csomagok küldését és fogadását a fejlesztőlap és egy PC számítógép között. megoldás: A fejlesztőlapra,
BEÁGYAZOTT RENDSZEREK TERVEZÉSE 1 feladat: A Netburner MOD5270 fejlesztőlap segítségével megvalósítani csomagok küldését és fogadását a fejlesztőlap és egy PC számítógép között. megoldás: A fejlesztőlapra,
VI. Robotprogramozó Országos Csapatverseny Döntő versenyfeladatok. 5. évfolyam
 VI. Robotprogramozó Országos Csapatverseny Döntő versenyfeladatok 5. évfolyam 2015. április 25. A robot portjainak kiosztása: Motorok: B és C Szenzorok: Ütközésérzékelő (Touch): Fényszenzor/színszenzor
VI. Robotprogramozó Országos Csapatverseny Döntő versenyfeladatok 5. évfolyam 2015. április 25. A robot portjainak kiosztása: Motorok: B és C Szenzorok: Ütközésérzékelő (Touch): Fényszenzor/színszenzor
A 2010/2011 tanévi Országos Középiskolai Tanulmányi Verseny első forduló feladatainak megoldása. INFORMATIKÁBÓL II. (programozás) kategóriában
 kategóriában") Oktatási Hivatal A 2010/2011 tanévi Országos Középiskolai Tanulmányi Verseny első forduló feladatainak megoldása INFORMATIKÁBÓL II. (programozás) kategóriában Kérjük a tisztelt tanár kollégákat, hogy a
Oktatási Hivatal A 2010/2011 tanévi Országos Középiskolai Tanulmányi Verseny első forduló feladatainak megoldása INFORMATIKÁBÓL II. (programozás) kategóriában Kérjük a tisztelt tanár kollégákat, hogy a
Neumann János Számítógép-tudományi Társaság Programozás, robotprogramozás szakkör Három félév 3 * 8 foglalkozás
 Neumann János Számítógép-tudományi Társaság Programozás, robotprogramozás szakkör Három félév 3 * 8 foglalkozás Első félév A modul időtartama: A modul célja: A modul tartalma: 8 foglalkozás, alkalmanként
Neumann János Számítógép-tudományi Társaság Programozás, robotprogramozás szakkör Három félév 3 * 8 foglalkozás Első félév A modul időtartama: A modul célja: A modul tartalma: 8 foglalkozás, alkalmanként
A tanulók gyűjtsenek saját tapasztalatot az adott szenzorral mérhető tartomány határairól.
 A távolságszenzorral kapcsolatos kísérlet, megfigyelés és mérések célkitűzése: A diákok ismerjék meg az ultrahangos távolságérzékelő használatát. Szerezzenek jártasságot a kezelőszoftver használatában,
A távolságszenzorral kapcsolatos kísérlet, megfigyelés és mérések célkitűzése: A diákok ismerjék meg az ultrahangos távolságérzékelő használatát. Szerezzenek jártasságot a kezelőszoftver használatában,
ROBOTIKA FELADATGYŰJTEMÉNY
 Kiss Róbert ROBOTIKA FELADATGYŰJTEMÉNY 111 feladat LEGO MINDSTORMS EV3 és NXT robotokhoz A könyv elektronikus változatának kiadása a H-Didakt Kft. jóvoltából jöhetett létre 2016 H-Didakt Kft 1162 Budapest,
Kiss Róbert ROBOTIKA FELADATGYŰJTEMÉNY 111 feladat LEGO MINDSTORMS EV3 és NXT robotokhoz A könyv elektronikus változatának kiadása a H-Didakt Kft. jóvoltából jöhetett létre 2016 H-Didakt Kft 1162 Budapest,
A foglalkozás céljának eléréséhez a következő tevékenységeket végezzük el:
 A FOGLAKOZÁS ADATAI: SZERZŐ Kiss Róbert A FOGLALKOZÁS CÍME Dinamikus rajzolás robotképernyőn A FOGLALKOZÁS RÖVID LEÍRÁSA A LEGO MindStorms NXT/EV3 robot grafikus képernyőjét és programozási eszközeit használva
A FOGLAKOZÁS ADATAI: SZERZŐ Kiss Róbert A FOGLALKOZÁS CÍME Dinamikus rajzolás robotképernyőn A FOGLALKOZÁS RÖVID LEÍRÁSA A LEGO MindStorms NXT/EV3 robot grafikus képernyőjét és programozási eszközeit használva
IV. LEGO Robotprogramozó Országos Csapatverseny
 BÁNYAI JÚLIA GIMNÁZIUM - ROBOTIKA CSOPORT Tel.: 76/481-474 (+36 20 479 8460) Fax.: 76/486-942 web: http://www.banyai-kkt.sulinet.hu/robotika e-mail: [email protected] IV. LEGO Robotprogramozó Országos
BÁNYAI JÚLIA GIMNÁZIUM - ROBOTIKA CSOPORT Tel.: 76/481-474 (+36 20 479 8460) Fax.: 76/486-942 web: http://www.banyai-kkt.sulinet.hu/robotika e-mail: [email protected] IV. LEGO Robotprogramozó Országos
SZERZŐ: Kiss Róbert. Oldal1
 A LEGO MindStorms NXT/EV3 robot grafikus képernyőjét és programozási eszközeit használva különböző dinamikus (időben változó) ábrákat tudunk rajzolni. A képek létrehozásához koordináta rendszerben adott
A LEGO MindStorms NXT/EV3 robot grafikus képernyőjét és programozási eszközeit használva különböző dinamikus (időben változó) ábrákat tudunk rajzolni. A képek létrehozásához koordináta rendszerben adott
A PR-650 2. verziójának új funkciói HU
 A PR-650 2. verziójának új funkciói HU A második verzióban az itt bemutatott új funkciók kaptak helyet. A gép használata előtt figyelmesen olvassa el ezt az útmutatót és a PR650-es varrógéphez tartozó
A PR-650 2. verziójának új funkciói HU A második verzióban az itt bemutatott új funkciók kaptak helyet. A gép használata előtt figyelmesen olvassa el ezt az útmutatót és a PR650-es varrógéphez tartozó
VI. Robotprogramozó Országos Csapatverseny évfolyam
 VI. Robotprogramozó Országos Csapatverseny Országos döntőjének versenyfeladatai 7-8. évfolyam 2015. április 25. A robot portjainak kiosztása: Motorok: B és C Szenzorok: Ütközésérzékelő (Touch): 1-es port
VI. Robotprogramozó Országos Csapatverseny Országos döntőjének versenyfeladatai 7-8. évfolyam 2015. április 25. A robot portjainak kiosztása: Motorok: B és C Szenzorok: Ütközésérzékelő (Touch): 1-es port
PLC Versenyfeladat. XIV. Országos Irányítástechnikai Programozó Verseny Budapest, március Összeállította az EvoPro Kft.
 PLC Versenyfeladat XIV. Országos Irányítástechnikai Programozó Verseny Budapest, 2008. március 19-21. Összeállította az EvoPro Kft. Általános bemutatás A feladatban szereplő eszköz egy 8x8 képpontos LED-mátrix
PLC Versenyfeladat XIV. Országos Irányítástechnikai Programozó Verseny Budapest, 2008. március 19-21. Összeállította az EvoPro Kft. Általános bemutatás A feladatban szereplő eszköz egy 8x8 képpontos LED-mátrix
nagyoknak kicsiknek SKOLÁBA ISKOLÁBA ISKOLÁBA ISKOLÁ PROGRAMOZÁS ROBOTIKA BEHOZZUK A ZÖLD ENERGIÁKAT AZ OSZTÁLYTERMEKBE
 SKOLÁBA ISKOLÁBA ISKOLÁBA ISKOLÁ PROGRAMOZÁS ROBOTIKA nagyoknak kicsiknek BEHOZZUK A ZÖLD ENERGIÁKAT AZ OSZTÁLYTERMEKBE TUDOMÁNY ÉS TECHNIKA Egyszerű és meghajtott gépek Tudomány Műveltség Matek Kommunikáció
SKOLÁBA ISKOLÁBA ISKOLÁBA ISKOLÁ PROGRAMOZÁS ROBOTIKA nagyoknak kicsiknek BEHOZZUK A ZÖLD ENERGIÁKAT AZ OSZTÁLYTERMEKBE TUDOMÁNY ÉS TECHNIKA Egyszerű és meghajtott gépek Tudomány Műveltség Matek Kommunikáció
RÖVID LEÍRÁS: VIDEÓ: http://www.youtube.com/watch?v=8nz1oscfywi A ROBOT MEGÉPÍTÉSI IDEJE: ~1,5 óra ROBOTFACTORY ELTE, APÁCZAI CSERE JÁNOS
 Az ELTE Apáczai Csere János Gyakorlógimnázium lelkes robotépítő csapata, a ROBOTFACTORY egy kártyaosztó robotot készített, hogy megkönnyítse mindennapi pókerpartijaikat. RÖVID LEÍRÁS: A robot a Texas Hold
Az ELTE Apáczai Csere János Gyakorlógimnázium lelkes robotépítő csapata, a ROBOTFACTORY egy kártyaosztó robotot készített, hogy megkönnyítse mindennapi pókerpartijaikat. RÖVID LEÍRÁS: A robot a Texas Hold
Robotika. Relatív helymeghatározás Odometria
 Robotika Relatív helymeghatározás Odometria Differenciális hajtás c m =πd n /nc e c m D n C e n = hány mm-t tesz meg a robot egy jeladó impulzusra = névleges kerék átmérő = jeladó fölbontása (impulzus/ford.)
Robotika Relatív helymeghatározás Odometria Differenciális hajtás c m =πd n /nc e c m D n C e n = hány mm-t tesz meg a robot egy jeladó impulzusra = névleges kerék átmérő = jeladó fölbontása (impulzus/ford.)
SZERZŐ: Kiss Róbert. Oldal1
 A LOGO MindStorms NXT/EV3 robot grafikus képernyőjét használva különböző ábrákat tudunk rajzolni. A képek létrehozásához koordináta rendszerben adott alakzatok (kör, téglalap, szakasz, pont) meghatározó
A LOGO MindStorms NXT/EV3 robot grafikus képernyőjét használva különböző ábrákat tudunk rajzolni. A képek létrehozásához koordináta rendszerben adott alakzatok (kör, téglalap, szakasz, pont) meghatározó
Városi tömegközlekedés és utastájékoztatás szoftver támogatása
 Városi tömegközlekedés és utastájékoztatás szoftver támogatása 1. Általános célkitűzések: A kisvárosi helyi tömegközlekedés igényeit maximálisan kielégítő hardver és szoftver környezet létrehozása. A struktúra
Városi tömegközlekedés és utastájékoztatás szoftver támogatása 1. Általános célkitűzések: A kisvárosi helyi tömegközlekedés igényeit maximálisan kielégítő hardver és szoftver környezet létrehozása. A struktúra
A FOGLAKOZÁS ADATAI: SZERZŐ. Kiss Róbert. Körhinta A FOGLALKOZÁS CÍME A FOGLALKOZÁS RÖVID
 A FOGLAKOZÁS ADATAI: SZERZŐ Kiss Róbert A FOGLALKOZÁS CÍME Körhinta A FOGLALKOZÁS RÖVID LEÍRÁSA A foglalkozáson LEGO MindStorms NXT/EV3 robottal és LEGO alkatrészekkel alkutonk körhinta szimulációt. Ez
A FOGLAKOZÁS ADATAI: SZERZŐ Kiss Róbert A FOGLALKOZÁS CÍME Körhinta A FOGLALKOZÁS RÖVID LEÍRÁSA A foglalkozáson LEGO MindStorms NXT/EV3 robottal és LEGO alkatrészekkel alkutonk körhinta szimulációt. Ez
1. Mozgás Magyar Attila
 1. Mozgás Magyar Attila Pannon Egyetem Műszaki Informatikai Kar Villamosmérnöki és Információs Rendszerek Tanszék [email protected] 2011. szeptember 5. Bevezető 2 Kurzus célja 1. Mozgás
1. Mozgás Magyar Attila Pannon Egyetem Műszaki Informatikai Kar Villamosmérnöki és Információs Rendszerek Tanszék [email protected] 2011. szeptember 5. Bevezető 2 Kurzus célja 1. Mozgás
Intelligens biztonsági megoldások. Távfelügyelet
 Intelligens biztonsági megoldások A riasztást fogadó távfelügyeleti központok felelősek a felügyelt helyszínekről érkező információ hatékony feldolgozásáért, és a bejövő eseményekhez tartozó azonnali intézkedésekért.
Intelligens biztonsági megoldások A riasztást fogadó távfelügyeleti központok felelősek a felügyelt helyszínekről érkező információ hatékony feldolgozásáért, és a bejövő eseményekhez tartozó azonnali intézkedésekért.
Informatikai alapismeretek
 Informatikai alapismeretek Informatika tágabb értelemben -> tágabb értelemben az információ keletkezésével, továbbításával, tárolásával és feldolgozásával foglalkozik Informatika szűkebb értelemben-> számítógépes
Informatikai alapismeretek Informatika tágabb értelemben -> tágabb értelemben az információ keletkezésével, továbbításával, tárolásával és feldolgozásával foglalkozik Informatika szűkebb értelemben-> számítógépes
Nyomtató telepítése. 1. ábra Nyomtatók és faxok Nyomtató hozzáadása
 Ha ki szeretnénk nyomtatni az elkészített dokumentumainkat, akkor a nyomtató vezérlőprogramját a számítógépre kell telepítenünk. Ezáltal a számítógép irányítani tudja a nyomtatót, érzékeli üzeneteit. A
Ha ki szeretnénk nyomtatni az elkészített dokumentumainkat, akkor a nyomtató vezérlőprogramját a számítógépre kell telepítenünk. Ezáltal a számítógép irányítani tudja a nyomtatót, érzékeli üzeneteit. A
CAMLAND Beruházás-megfigyelő
 2016 CAMLAND Beruházás-megfigyelő Felhasználói útmutató Készítette: GeoVision Hungária Kft. Tartalomjegyzék Bevezető... 2 Bejelentkezés... 2 Vezérlőpult... 3 Kamera adatlap... 4 Nézetek kezelése... 6 Felhasználók...
2016 CAMLAND Beruházás-megfigyelő Felhasználói útmutató Készítette: GeoVision Hungária Kft. Tartalomjegyzék Bevezető... 2 Bejelentkezés... 2 Vezérlőpult... 3 Kamera adatlap... 4 Nézetek kezelése... 6 Felhasználók...
Csapat: Feladat: Ismertetni:
 Csapat: Feladat: Távirányítású vezérlés elészítése a Micro:Bi eszközhöz, amely egy másik micro:bit segítségével valósul meg, úgy hogy az eszköz mozgatásával rádiós jelet küld a vezérlő egység felé. Részfeledatok:
Csapat: Feladat: Távirányítású vezérlés elészítése a Micro:Bi eszközhöz, amely egy másik micro:bit segítségével valósul meg, úgy hogy az eszköz mozgatásával rádiós jelet küld a vezérlő egység felé. Részfeledatok:
SZÁMÍTÓGÉP FELÉPÍTÉSE (TK 61-TŐL)
") SZÁMÍTÓGÉP FELÉPÍTÉSE (TK 61-TŐL) SZÁMÍTÓGÉP Olyan elektronikus berendezés, amely adatok, információk feldolgozására képes emberi beavatkozás nélkül valamilyen program segítségével. HARDVER Összes műszaki
SZÁMÍTÓGÉP FELÉPÍTÉSE (TK 61-TŐL) SZÁMÍTÓGÉP Olyan elektronikus berendezés, amely adatok, információk feldolgozására képes emberi beavatkozás nélkül valamilyen program segítségével. HARDVER Összes műszaki
Navigációs GPS adatok kezelése QGIS programmal (1.4 verzió) Összeállította dr. Siki Zoltán
 Összeállította dr. Siki Zoltán") Navigációs GPS adatok kezelése QGIS programmal (1.4 verzió) Összeállította dr. Siki Zoltán A QGIS program GPS eszközök modulja segítségével kétirányú kommunikációt folytathatunk a navigációs GPS vevőnkkel.
Navigációs GPS adatok kezelése QGIS programmal (1.4 verzió) Összeállította dr. Siki Zoltán A QGIS program GPS eszközök modulja segítségével kétirányú kommunikációt folytathatunk a navigációs GPS vevőnkkel.
Zárójelentés. Az autonóm mobil eszközök felhasználási területei, irányítási módszerek
 Zárójelentés Az autonóm mobil eszközök felhasználási területei, irányítási módszerek Az autonóm mobil robotok elterjedése növekedést mutat napjainkban az egész hétköznapi felhasználástól kezdve az ember
Zárójelentés Az autonóm mobil eszközök felhasználási területei, irányítási módszerek Az autonóm mobil robotok elterjedése növekedést mutat napjainkban az egész hétköznapi felhasználástól kezdve az ember
Gyors-programozási Segédlet
 Gyors-programozási Segédlet A mikrokapcsolóval ellátott csőmotorok felprogramozása: (2016-tól az összes rádió-vezérelt Portos motor mikrokapcsolóval lett ellátva, a régebbi szériákra 2. oldaltól olvasható,
Gyors-programozási Segédlet A mikrokapcsolóval ellátott csőmotorok felprogramozása: (2016-tól az összes rádió-vezérelt Portos motor mikrokapcsolóval lett ellátva, a régebbi szériákra 2. oldaltól olvasható,
Rendszám felismerő rendszer általános működési leírás
 Rendszám felismerő rendszer általános működési leírás Creativ Bartex Solution Kft. 2009. A rendszer funkciója A rendszer fő funkciója elsősorban parkolóházak gépkocsiforgalmának, ki és beléptetésének kényelmesebbé
Rendszám felismerő rendszer általános működési leírás Creativ Bartex Solution Kft. 2009. A rendszer funkciója A rendszer fő funkciója elsősorban parkolóházak gépkocsiforgalmának, ki és beléptetésének kényelmesebbé
EGYSZERŰ GÉPEK. Azok az eszközök, amelyekkel kedvezőbbé lehet tenni az erőhatás nagyságát, irányát, támadáspontjának helyét.
 EGYSZERŰ GÉPEK Azok az eszközök, amelyekkel kedvezőbbé lehet tenni az erőhatás nagyságát, irányát, támadáspontjának helyét. Az egyszerű gépekkel munkát nem takaríthatunk meg, de ugyanazt a munkát kisebb
EGYSZERŰ GÉPEK Azok az eszközök, amelyekkel kedvezőbbé lehet tenni az erőhatás nagyságát, irányát, támadáspontjának helyét. Az egyszerű gépekkel munkát nem takaríthatunk meg, de ugyanazt a munkát kisebb
SZENZORFÚZIÓS ELJÁRÁSOK KIDOLGOZÁSA AUTONÓM JÁRMŰVEK PÁLYAKÖVETÉSÉRE ÉS IRÁNYÍTÁSÁRA
 infokommunikációs technológiák SZENZORFÚZIÓS ELJÁRÁSOK KIDOLGOZÁSA AUTONÓM JÁRMŰVEK PÁLYAKÖVETÉSÉRE ÉS IRÁNYÍTÁSÁRA BEVEZETŐ A KUTATÁS CÉLJA Autonóm járművek és robotok esetén elsődleges feladat a robotok
infokommunikációs technológiák SZENZORFÚZIÓS ELJÁRÁSOK KIDOLGOZÁSA AUTONÓM JÁRMŰVEK PÁLYAKÖVETÉSÉRE ÉS IRÁNYÍTÁSÁRA BEVEZETŐ A KUTATÁS CÉLJA Autonóm járművek és robotok esetén elsődleges feladat a robotok
Élettartam teszteknél alkalmazott programstruktúra egy váltóvezérlő példáján keresztül
 Élettartam teszteknél alkalmazott programstruktúra egy váltóvezérlő példáján keresztül 1 Tartalom Miről is lesz szó? Bosch GS-TC Automata sebességváltó TCU (Transmission Control Unit) Élettartam tesztek
Élettartam teszteknél alkalmazott programstruktúra egy váltóvezérlő példáján keresztül 1 Tartalom Miről is lesz szó? Bosch GS-TC Automata sebességváltó TCU (Transmission Control Unit) Élettartam tesztek
Robotkocsi mikrovezérlővel
 B é k é s c s a b a i K ö z p o n t i S z a k k é p z ő I s k o l a é s K o l l é g i u m Trefort Ágoston Műszaki Tagiskolája 5600 Békéscsaba, Puskin tér 1. Pf. 62 www.taszi.hu XVII. ORSZÁGOS ELEKTRONIKAI
B é k é s c s a b a i K ö z p o n t i S z a k k é p z ő I s k o l a é s K o l l é g i u m Trefort Ágoston Műszaki Tagiskolája 5600 Békéscsaba, Puskin tér 1. Pf. 62 www.taszi.hu XVII. ORSZÁGOS ELEKTRONIKAI
A FOGLAKOZÁS ADATAI: SZERZŐ. Vindics Dóra. Vezérelj robotot! A FOGLALKOZÁS CÍME A FOGLALKOZÁS RÖVID
 A FOGLAKOZÁS ADATAI: SZERZŐ Vindics Dóra A FOGLALKOZÁS CÍME Vezérelj robotot! A FOGLALKOZÁS RÖVID LEÍRÁSA A tanulók gyakran nem értik, hogy miért van szükség arra, amit matematika órán tanulnak. Ebben
A FOGLAKOZÁS ADATAI: SZERZŐ Vindics Dóra A FOGLALKOZÁS CÍME Vezérelj robotot! A FOGLALKOZÁS RÖVID LEÍRÁSA A tanulók gyakran nem értik, hogy miért van szükség arra, amit matematika órán tanulnak. Ebben
Örömmel értesítjük, hogy csapatuk bejutott a verseny döntőjébe!
 Kecskeméti Főiskola GAMF Kar Kalmár Sándor Informatika Intézet Bányai Júlia Gimnázium Kecskemét Tisztelt Versenyzők! A Kecskeméti Főiskola Gépipari és Automatizálási Műszaki Főiskolai (GAMF) Kara és a
Kecskeméti Főiskola GAMF Kar Kalmár Sándor Informatika Intézet Bányai Júlia Gimnázium Kecskemét Tisztelt Versenyzők! A Kecskeméti Főiskola Gépipari és Automatizálási Műszaki Főiskolai (GAMF) Kara és a
Garázsajtó nyitó (R-1350 G)
") Garázsajtó nyitó (R-1350 G) Mûszaki adatok: Húzóerô: 1100 N/R-1350G Vezérlô: CPU Vezérlési módszer: impulzus indukció Motor: 24 V Világítás: 1 25 W, E14 Ajtó sebessége: 11 cm/mp Biztosíték típusa: teljesítmény
Garázsajtó nyitó (R-1350 G) Mûszaki adatok: Húzóerô: 1100 N/R-1350G Vezérlô: CPU Vezérlési módszer: impulzus indukció Motor: 24 V Világítás: 1 25 W, E14 Ajtó sebessége: 11 cm/mp Biztosíték típusa: teljesítmény
Perifériáknak nevezzük a számítógép központi egységéhez kívülről csatlakozó eszközöket, melyek az adatok ki- vagy bevitelét, illetve megjelenítését
 Perifériák monitor Perifériáknak nevezzük a számítógép központi egységéhez kívülről csatlakozó eszközöket, melyek az adatok ki- vagy bevitelét, illetve megjelenítését szolgálják. Segít kapcsolatot teremteni
Perifériák monitor Perifériáknak nevezzük a számítógép központi egységéhez kívülről csatlakozó eszközöket, melyek az adatok ki- vagy bevitelét, illetve megjelenítését szolgálják. Segít kapcsolatot teremteni
Fordulékonyabbak az új rakodók
 A frontkaszákról szóló korábbi cikkünk itt érhető el. A CLAAS, a Liebherrel való együttműködés keretében további kerekes rakodó modelleket kínál az 5,6 és 9 tonnás kategóriában. A három új Torion Sinusban
A frontkaszákról szóló korábbi cikkünk itt érhető el. A CLAAS, a Liebherrel való együttműködés keretében további kerekes rakodó modelleket kínál az 5,6 és 9 tonnás kategóriában. A három új Torion Sinusban
Felhasználói kézikönyv
 Felhasználói kézikönyv 6234C Fordulatszámmérő TARTALOMJEGYZÉK 1. Termékjellemzők... 2 2. Műszaki jellemzők... 2 3. Előlap és kezelőszervek... 2 4. Működési leírás... 3 5. Mérési folyamat... 4 6. Elem cseréje...
Felhasználói kézikönyv 6234C Fordulatszámmérő TARTALOMJEGYZÉK 1. Termékjellemzők... 2 2. Műszaki jellemzők... 2 3. Előlap és kezelőszervek... 2 4. Működési leírás... 3 5. Mérési folyamat... 4 6. Elem cseréje...
Beachside FAMILY. Kombinált Infraszauna HASZNÁLATI ÚTMUTATÓ
 Beachside FAMILY Kombinált Infraszauna HASZNÁLATI ÚTMUTATÓ Beachside FAMILY Kombinált Infraszauna Méretei: 2000x1950x2100 2-4 személyes Candlenut diófa infraszauna Füstszínű üvegajtó Színterápiás világítás
Beachside FAMILY Kombinált Infraszauna HASZNÁLATI ÚTMUTATÓ Beachside FAMILY Kombinált Infraszauna Méretei: 2000x1950x2100 2-4 személyes Candlenut diófa infraszauna Füstszínű üvegajtó Színterápiás világítás
Garázsajtó nyitó (R-1350 G)
") Garázsajtó nyitó (R-1350 G) Mûszaki adatok: Húzóerô: 1100 N/R-1350G Vezérlô: CPU Vezérlési módszer: impulzus indukció Motor: 24 V Világítás: 1 25 W, E14 Ajtó sebessége: 11 cm/mp Biztosíték típusa: teljesítmény
Garázsajtó nyitó (R-1350 G) Mûszaki adatok: Húzóerô: 1100 N/R-1350G Vezérlô: CPU Vezérlési módszer: impulzus indukció Motor: 24 V Világítás: 1 25 W, E14 Ajtó sebessége: 11 cm/mp Biztosíték típusa: teljesítmény
Mezőgazdasági robot fejlesztése és jövőbeli bővíthetősége
 Mezőgazdasági robot fejlesztése és jövőbeli bővíthetősége Tóth Mihály Informatikus és szakigazgatási agrármérnök (BSc) Konzulens: Dr. Szilágyi Róbert 2014.11.14. Az informatika, mint segítő ágazat Az informatika
Mezőgazdasági robot fejlesztése és jövőbeli bővíthetősége Tóth Mihály Informatikus és szakigazgatási agrármérnök (BSc) Konzulens: Dr. Szilágyi Róbert 2014.11.14. Az informatika, mint segítő ágazat Az informatika
GOKI GQ-8505B 8 CSATORNÁS KÉPOSZTÓ. Felhasználói kézikönyv
 GOKI GQ-8505B 8 CSATORNÁS KÉPOSZTÓ Felhasználói kézikönyv Műszaki jellemzők - Egyszerre 4/8 kamera csatlakoztatható Állítható fényerő, kontraszt, telítettség, színárnyalat és élesség - Magas felbontás
GOKI GQ-8505B 8 CSATORNÁS KÉPOSZTÓ Felhasználói kézikönyv Műszaki jellemzők - Egyszerre 4/8 kamera csatlakoztatható Állítható fényerő, kontraszt, telítettség, színárnyalat és élesség - Magas felbontás
Fényerő Fókuszálás Fénymező mérete. Videó kamerával (opció)
") Fényerő Fókuszálás Fénymező mérete LO-05 LO-03 Videó kamerával (opció) A vezérlő panel lehetővé teszi a lámpák be- és kikapcsolását, a fényerő és a fókusz állítását (az izzó elmozdulása a reflektor fókuszpontjához
Fényerő Fókuszálás Fénymező mérete LO-05 LO-03 Videó kamerával (opció) A vezérlő panel lehetővé teszi a lámpák be- és kikapcsolását, a fényerő és a fókusz állítását (az izzó elmozdulása a reflektor fókuszpontjához
Beltéri autonóm négyrotoros helikopter szabályozó rendszerének kifejlesztése és hardware-in-the-loop tesztelése
 Beltéri autonóm négyrotoros helikopter szabályozó rendszerének kifejlesztése és hardware-in-the-loop tesztelése Regula Gergely, Lantos Béla BME Villamosmérnöki és Informatikai Kar Irányítástechnika és
Beltéri autonóm négyrotoros helikopter szabályozó rendszerének kifejlesztése és hardware-in-the-loop tesztelése Regula Gergely, Lantos Béla BME Villamosmérnöki és Informatikai Kar Irányítástechnika és
SMART Board 885ix interaktív táblarendszer
 SMART Board 885ix interaktív táblarendszer A szélesvásznú SMART Board 885ix interaktív táblarendszer segítségével teljesen új magasságokba emelkedik az együttműködés. A 885ix rendszerrel egyszerre két
SMART Board 885ix interaktív táblarendszer A szélesvásznú SMART Board 885ix interaktív táblarendszer segítségével teljesen új magasságokba emelkedik az együttműködés. A 885ix rendszerrel egyszerre két
Dunaújvárosi Főiskola Informatikai Intézet. Intelligens ágensek. Dr. Seebauer Márta. főiskolai tanár
 Dunaújvárosi Főiskola Informatikai Intézet Intelligens ágensek Dr. Seebauer Márta főiskolai tanár [email protected] Ágens Ágens (agent) bármi lehet, amit úgy tekinthetünk, hogy érzékelők (sensors)
Dunaújvárosi Főiskola Informatikai Intézet Intelligens ágensek Dr. Seebauer Márta főiskolai tanár [email protected] Ágens Ágens (agent) bármi lehet, amit úgy tekinthetünk, hogy érzékelők (sensors)
Számítógépes alapismeretek 1.
 Számítógépes alapismeretek 1. 1/7 Kitöltő adatai: 1. Név: 2. Osztály: 3. E-mail címe: 2/7 Kérdések: 1. Mi az IKT (Információs és Kommunikációs Technológia)? Olyan eszközök, technológiák, amik az információ
Számítógépes alapismeretek 1. 1/7 Kitöltő adatai: 1. Név: 2. Osztály: 3. E-mail címe: 2/7 Kérdések: 1. Mi az IKT (Információs és Kommunikációs Technológia)? Olyan eszközök, technológiák, amik az információ
A TERC VIP költségvetés-készítő program telepítése, Interneten keresztül, manuálisan
 Telepítés internetről A TERC VIP költségvetés-készítő program telepítése, Interneten keresztül, manuálisan Új szolgáltatásunk keretén belül, olyan lehetőséget kínálunk a TERC VIP költségvetéskészítő program
Telepítés internetről A TERC VIP költségvetés-készítő program telepítése, Interneten keresztül, manuálisan Új szolgáltatásunk keretén belül, olyan lehetőséget kínálunk a TERC VIP költségvetéskészítő program
LED DRIVER 6. 6 csatornás 12-24V-os LED meghajtó. (RDM Kompatibilis) Kezelési útmutató
 Kezelési útmutató") LED DRIVER 6 6 csatornás 12-24V-os LED meghajtó (RDM Kompatibilis) Kezelési útmutató Tartsa meg a dokumentumot, a jövőben is szüksége lehet rá! rev 2 2015.09.30 DEZELECTRIC LED DRIVER Bemutatás A LED DRIVER
LED DRIVER 6 6 csatornás 12-24V-os LED meghajtó (RDM Kompatibilis) Kezelési útmutató Tartsa meg a dokumentumot, a jövőben is szüksége lehet rá! rev 2 2015.09.30 DEZELECTRIC LED DRIVER Bemutatás A LED DRIVER
Garázsajtó nyitó R-1350 G
 Garázsajtó nyitó R-1350 G Mûszaki adatok: Húzóerô: 1100 N/R-1350G Vezérlô: CPU Vezérlési módszer: impulzus indukció Motor: 24 V Világítás: 1 25 W, E14 Ajtó sebessége: 11 cm/mp Biztosíték típusa: teljesítmény
Garázsajtó nyitó R-1350 G Mûszaki adatok: Húzóerô: 1100 N/R-1350G Vezérlô: CPU Vezérlési módszer: impulzus indukció Motor: 24 V Világítás: 1 25 W, E14 Ajtó sebessége: 11 cm/mp Biztosíték típusa: teljesítmény
Örökmozgók. 10. évfolyam
 Örökmozgók 10. évfolyam A hőtan tanítása során játékos formában megmozgathatjuk a tanulók fantáziáját azokkal az ötletes gépekkel, amelyekkel feltalálóik megpróbálták kijátszani a hőtan első főtételét.
Örökmozgók 10. évfolyam A hőtan tanítása során játékos formában megmozgathatjuk a tanulók fantáziáját azokkal az ötletes gépekkel, amelyekkel feltalálóik megpróbálták kijátszani a hőtan első főtételét.
SZERZŐ: Kiss Róbert. Oldal1
 A foglalkozáson LEGO MindStorms NXT/EV3 robottal és LEGO alkatrészekkel alkutonk körhinta szimulációt. Ez egyszerű építést és programozást igénylő feladat. Játékos formában lehet a fizikai forgást, egyensúlyt
A foglalkozáson LEGO MindStorms NXT/EV3 robottal és LEGO alkatrészekkel alkutonk körhinta szimulációt. Ez egyszerű építést és programozást igénylő feladat. Játékos formában lehet a fizikai forgást, egyensúlyt
Készítette: X. Y. 12.F. Konzulens tanár: W. Z.
 TÁVVEZÉRLÉS SOROS KOMMUNKÁCIÓVAL ESZKÖZÖKÖN Készítette: X. Y. 12.F Konzulens tanár: W. Z. I. Cél: A MESTER robot mozgatáskor compass modul segítségével kiszámítja, hány fokot fordult el előző helyzetéhez
TÁVVEZÉRLÉS SOROS KOMMUNKÁCIÓVAL ESZKÖZÖKÖN Készítette: X. Y. 12.F Konzulens tanár: W. Z. I. Cél: A MESTER robot mozgatáskor compass modul segítségével kiszámítja, hány fokot fordult el előző helyzetéhez
A háttértárak a program- és adattárolás eszközei.
 A háttértárak a program- és adattárolás eszközei. Míg az operatív memória (RAM) csak ideiglenesen, legfeljebb a gép kikapcsolásáig őrzi meg tartalmát, a háttértárolókon nagy mennyiségű adat akár évtizedekig
A háttértárak a program- és adattárolás eszközei. Míg az operatív memória (RAM) csak ideiglenesen, legfeljebb a gép kikapcsolásáig őrzi meg tartalmát, a háttértárolókon nagy mennyiségű adat akár évtizedekig
Csőmotor Redőnyhöz Oximo WT motorok
 Csőmotor Redőnyhöz Oximo WT motorok Oximo WT: Automatikus végállás beállítás, motorfejen nem kell végállást állítani Akadályfelismerő funkció Típusok: Cikkszám Hossz L1 Hossz L2 Forgatónyomaték (Nm) Oximo
Csőmotor Redőnyhöz Oximo WT motorok Oximo WT: Automatikus végállás beállítás, motorfejen nem kell végállást állítani Akadályfelismerő funkció Típusok: Cikkszám Hossz L1 Hossz L2 Forgatónyomaték (Nm) Oximo
RFID-val támogatott eszközleltár
 1. A rendszer célja RFID-val támogatott eszközleltár A rendszer célja, hogy a Felhasználó tárgyi eszköz, kiemelten infokommunikációs eszköz, leltározási folyamatát támogassa, azt gyorsan, könnyen és hibamentesen
1. A rendszer célja RFID-val támogatott eszközleltár A rendszer célja, hogy a Felhasználó tárgyi eszköz, kiemelten infokommunikációs eszköz, leltározási folyamatát támogassa, azt gyorsan, könnyen és hibamentesen
Negatív alapú számrendszerek
 2015. március 4. Negatív számok Legyen b > 1 egy adott egész szám. Ekkor bármely N 0 egész szám egyértelműen felírható N = m a k b k k=1 alakban, ahol 0 a k < b egész szám. Negatív számok Legyen b > 1
2015. március 4. Negatív számok Legyen b > 1 egy adott egész szám. Ekkor bármely N 0 egész szám egyértelműen felírható N = m a k b k k=1 alakban, ahol 0 a k < b egész szám. Negatív számok Legyen b > 1
Forgattyús tengely alátámasztás: Állítható magasságú kézi fogantyú: Alumínium présöntvény ház:
 Forgattyús tengely alátámasztás: A forgattyús tengely alátámasztása a tengelynek kiegészít, oldalsó stabilitást biztosít ez csökkenti a motor sérülésének kockázatát a forgattyús tengely elhajlása miatt,
Forgattyús tengely alátámasztás: A forgattyús tengely alátámasztása a tengelynek kiegészít, oldalsó stabilitást biztosít ez csökkenti a motor sérülésének kockázatát a forgattyús tengely elhajlása miatt,
Járműkövető rendszer RÉSZLETES ISMERTETŐ
 efollow Járműkövető rendszer RÉSZLETES ISMERTETŐ Tartalomjegyzék 1.1. BEVEZETÉS...3 1.2. JÁRMŰKÖVETŐ RENDSZER FELADATA...3 2.1. MIT TUD AZ EFOLLOW?...3 2.2. MILYEN JÁRMŰADATOKAT MÉR JELENLEG A RENDSZER?...3
efollow Járműkövető rendszer RÉSZLETES ISMERTETŐ Tartalomjegyzék 1.1. BEVEZETÉS...3 1.2. JÁRMŰKÖVETŐ RENDSZER FELADATA...3 2.1. MIT TUD AZ EFOLLOW?...3 2.2. MILYEN JÁRMŰADATOKAT MÉR JELENLEG A RENDSZER?...3
Használati útmutató. JY-M19-CW típusú (KM0160) vezeték nélküli Km óra
 vezeték nélküli Km óra") Használati útmutató JY-M19-CW típusú (KM0160) vezeték nélküli Km óra Kérem, olvassa végig figyelmesen az alábbi leírást, mielőtt használná ezt a km órát. Funkciói: 1. Jelenlegi sebesség (SPD) 2. 24 órás
Használati útmutató JY-M19-CW típusú (KM0160) vezeték nélküli Km óra Kérem, olvassa végig figyelmesen az alábbi leírást, mielőtt használná ezt a km órát. Funkciói: 1. Jelenlegi sebesség (SPD) 2. 24 órás
e 120 KÁRTYÁS KÖZPONTI ZÁR VEZÉRLŐ KÉSZÜLÉK (K-CARD)
") e 120 KÁRTYÁS KÖZPONTI ZÁR VEZÉRLŐ KÉSZÜLÉK (K-CARD) BESZERELÉSI ÚTMUTATÓ Az e120 egy központi zár vezérlő készülék, amely két db elektronikus kártyával kerül forgalomba. A készülék az elektronikus kártya
e 120 KÁRTYÁS KÖZPONTI ZÁR VEZÉRLŐ KÉSZÜLÉK (K-CARD) BESZERELÉSI ÚTMUTATÓ Az e120 egy központi zár vezérlő készülék, amely két db elektronikus kártyával kerül forgalomba. A készülék az elektronikus kártya
Garázsajtó nyitó R-1350 G
 Garázsajtó nyitó R-13 G Mûszaki adatok: Húzóerô: 1100 N/R-13G Vezérlô: CPU Vezérlési módszer: impulzus indukció Motor: 24 V Világítás: 1 25 W, E14 Ajtó sebessége: 11 cm/mp Biztosíték típusa: teljesítmény
Garázsajtó nyitó R-13 G Mûszaki adatok: Húzóerô: 1100 N/R-13G Vezérlô: CPU Vezérlési módszer: impulzus indukció Motor: 24 V Világítás: 1 25 W, E14 Ajtó sebessége: 11 cm/mp Biztosíték típusa: teljesítmény
DENER Plazmavágók. Típus: Mitsubishi DNR-I 1530 CNC. Dener plazmavágás. Dener plazmavágók. http://www.dener.com/sayfa/89/plasma-cutting.
 DENER Plazmavágók Dener plazmavágás Dener plazmavágók http://www.dener.com/sayfa/89/plasma-cutting.html Típus: Mitsubishi DNR-I 1530 CNC A képek illusztrációk A képek illusztrációk A képek illusztrációk
DENER Plazmavágók Dener plazmavágás Dener plazmavágók http://www.dener.com/sayfa/89/plasma-cutting.html Típus: Mitsubishi DNR-I 1530 CNC A képek illusztrációk A képek illusztrációk A képek illusztrációk
ASTER motorok. Felszerelési és használati utasítás
 1. oldal ASTER motorok Felszerelési és használati utasítás A leírás fontossági és bonyolultsági sorrendben tartalmazza a készülékre vonatkozó elméleti és gyakorlati ismereteket. A gyakorlati lépések képpel
1. oldal ASTER motorok Felszerelési és használati utasítás A leírás fontossági és bonyolultsági sorrendben tartalmazza a készülékre vonatkozó elméleti és gyakorlati ismereteket. A gyakorlati lépések képpel
CS Lilin PIH-800II. Kezelő
 CS Lilin PIH-800II Kezelő Telepítési útmutató A leírás fontossági és bonyolultsági sorrendben tartalmazza a készülékre vonatkozó elméleti és gyakorlati ismereteket. A gyakorlati lépések képpel vannak illusztrálva,
CS Lilin PIH-800II Kezelő Telepítési útmutató A leírás fontossági és bonyolultsági sorrendben tartalmazza a készülékre vonatkozó elméleti és gyakorlati ismereteket. A gyakorlati lépések képpel vannak illusztrálva,
Ismerkedjünk tovább a számítógéppel. Alaplap és a processzeor
 Ismerkedjünk tovább a számítógéppel Alaplap és a processzeor Neumann-elvű számítógépek főbb egységei A részek feladatai: Központi egység: Feladata a számítógép vezérlése, és a számítások elvégzése. Operatív
Ismerkedjünk tovább a számítógéppel Alaplap és a processzeor Neumann-elvű számítógépek főbb egységei A részek feladatai: Központi egység: Feladata a számítógép vezérlése, és a számítások elvégzése. Operatív
Fogas kérdés. avagy dióhéjban a városmajori kisiklásokról.
 Nagy Andor [email protected] Fogas kérdés 1 avagy dióhéjban a városmajori kisiklásokról. A fogas különlegességei Egyedi jármű A forgalomirányítás KÖFI rendszerű Különleges pálya (nem csak a fogasléc miatt)
Nagy Andor [email protected] Fogas kérdés 1 avagy dióhéjban a városmajori kisiklásokról. A fogas különlegességei Egyedi jármű A forgalomirányítás KÖFI rendszerű Különleges pálya (nem csak a fogasléc miatt)
Irányítástechnika fejlődési irányai
 Irányítástechnika fejlődési irányai Irányítástechnikai megoldások Rendszer felépítések 1 Rendszer felépítést, üzemeltetést befolyásoló tényezők Az üzemeltető hozzáállása, felkészültsége, technológia ismerete
Irányítástechnika fejlődési irányai Irányítástechnikai megoldások Rendszer felépítések 1 Rendszer felépítést, üzemeltetést befolyásoló tényezők Az üzemeltető hozzáállása, felkészültsége, technológia ismerete
RSC-2R. Wireless Modem RS232, RS232 vonalhosszabbító, RS 232 / Rádió konverter
 RSC-2R Wireless Modem RS232, RS232 vonalhosszabbító, RS 232 / Rádió konverter Felhasználás Az RS232 rádiómodem egy DB9-es csatlakozóval RS232 portra kapcsolható, pl. PC-hez vagy egyéb soros kimenetű mobil
RSC-2R Wireless Modem RS232, RS232 vonalhosszabbító, RS 232 / Rádió konverter Felhasználás Az RS232 rádiómodem egy DB9-es csatlakozóval RS232 portra kapcsolható, pl. PC-hez vagy egyéb soros kimenetű mobil
A FOGLAKOZÁS ADATAI: SZERZŐ. Virga Krisztina A FOGLALKOZÁS CÍME. Húzd meg jobban, menjen a munka! Modellezzünk raktárt! A FOGLALKOZÁS RÖVID
 A FOGLAKOZÁS ADATAI: SZERZŐ Virga Krisztina A FOGLALKOZÁS CÍME Húzd meg jobban, menjen a munka! Modellezzünk raktárt! A FOGLALKOZÁS RÖVID LEÍRÁSA A foglalkozás egy összetett feladat adott részének megvalósítását
A FOGLAKOZÁS ADATAI: SZERZŐ Virga Krisztina A FOGLALKOZÁS CÍME Húzd meg jobban, menjen a munka! Modellezzünk raktárt! A FOGLALKOZÁS RÖVID LEÍRÁSA A foglalkozás egy összetett feladat adott részének megvalósítását
A II. kategória Fizika OKTV mérési feladatainak megoldása
 Nyomaték (x 0 Nm) O k t a t á si Hivatal A II. kategória Fizika OKTV mérési feladatainak megoldása./ A mágnes-gyűrűket a feladatban meghatározott sorrendbe és helyre rögzítve az alábbi táblázatban feltüntetett
Nyomaték (x 0 Nm) O k t a t á si Hivatal A II. kategória Fizika OKTV mérési feladatainak megoldása./ A mágnes-gyűrűket a feladatban meghatározott sorrendbe és helyre rögzítve az alábbi táblázatban feltüntetett
Kincsem Park (biztonsági rendszerterv vázlat)
") Kincsem Park (biztonsági rendszerterv vázlat) 1 1. Célkitűzés A későbbiekben részletesen bemutatásra kerülő automatizált esemény / incidens felismerő és arcfelismerésen alapuló beléptető videó kamera rendszer
Kincsem Park (biztonsági rendszerterv vázlat) 1 1. Célkitűzés A későbbiekben részletesen bemutatásra kerülő automatizált esemény / incidens felismerő és arcfelismerésen alapuló beléptető videó kamera rendszer
Az utóbbi állításnál a képlettel bizonyítható az állítás helyessége, mivel erő szorozva erőkarral
 Bevezetés, alapfogalmak A csörlődobon a kötél rétegekből épül fel, ahogy a képen látható, ebből következik, hogy felcsévélés közben a kötéldobon található kötélrétegnek a kerülete folyamatosan növekszik,
Bevezetés, alapfogalmak A csörlődobon a kötél rétegekből épül fel, ahogy a képen látható, ebből következik, hogy felcsévélés közben a kötéldobon található kötélrétegnek a kerülete folyamatosan növekszik,
GIS Open 2011 Székesfehérvár Leica Viva Integrált felmérés eszközei Leica Viva Képalkotási Technológiák Horváth Zsolt Leica Geosystems Hungary Kft
 GIS Open 2011 Székesfehérvár Leica Viva Integrált felmérés eszközei Leica Viva Képalkotási Technológiák Horváth Zsolt Leica Geosystems Hungary Kft Leica Viva Series Egy teljes felmérő rendszer 2 Új TS11
GIS Open 2011 Székesfehérvár Leica Viva Integrált felmérés eszközei Leica Viva Képalkotási Technológiák Horváth Zsolt Leica Geosystems Hungary Kft Leica Viva Series Egy teljes felmérő rendszer 2 Új TS11
IoT alapú mezőgazdasági adatgyűjtő prototípus fejlesztési tapasztalatok
 IoT alapú mezőgazdasági adatgyűjtő prototípus fejlesztési tapasztalatok 2016.05.19. Szilágyi Róbert Tóth Mihály Debreceni Egyetem Az IoT Eszközök és más fizikai objektumok elektronikával, vezérléssel,
IoT alapú mezőgazdasági adatgyűjtő prototípus fejlesztési tapasztalatok 2016.05.19. Szilágyi Róbert Tóth Mihály Debreceni Egyetem Az IoT Eszközök és más fizikai objektumok elektronikával, vezérléssel,
www.metroman.hu Felhasználói kézikönyv CIKKSZÁM: M070704L + C120W Installálás és beüzemelés előtt figyelmesen olvassa el!
 www.metroman.hu VEZETÉK NÉLKÜLI 7 LCD TFT SZÍNES MEGFIGYELŐ RENDSZER Felhasználói kézikönyv CIKKSZÁM: M070704L + C120W Installálás és beüzemelés előtt figyelmesen olvassa el! Köszönjük, hogy az általunk
www.metroman.hu VEZETÉK NÉLKÜLI 7 LCD TFT SZÍNES MEGFIGYELŐ RENDSZER Felhasználói kézikönyv CIKKSZÁM: M070704L + C120W Installálás és beüzemelés előtt figyelmesen olvassa el! Köszönjük, hogy az általunk
TERC V.I.P. hardverkulcs regisztráció
 TERC V.I.P. hardverkulcs regisztráció 2014. második félévétől kezdődően a TERC V.I.P. költségvetés-készítő program hardverkulcsát regisztrálniuk kell a felhasználóknak azon a számítógépen, melyeken futtatni
TERC V.I.P. hardverkulcs regisztráció 2014. második félévétől kezdődően a TERC V.I.P. költségvetés-készítő program hardverkulcsát regisztrálniuk kell a felhasználóknak azon a számítógépen, melyeken futtatni
Felhasználói Kézikönyv. Rii i7. Multimédiás Távirányító
 Felhasználói Kézikönyv Rii i7 Multimédiás Távirányító 1. Bevezetés Ez egy vezetéknélküli távirányító lézeres mutatóval és USB vevőegységgel. Alkalmas irodai és otthoni használatra, illetve közlekedési
Felhasználói Kézikönyv Rii i7 Multimédiás Távirányító 1. Bevezetés Ez egy vezetéknélküli távirányító lézeres mutatóval és USB vevőegységgel. Alkalmas irodai és otthoni használatra, illetve közlekedési
Láthatósági kérdések
 Láthatósági kérdések Láthatósági algoritmusok Adott térbeli objektum és adott nézőpont esetén el kell döntenünk, hogy mi látható az adott alakzatból a nézőpontból, vagy irányából nézve. Az algoritmusok
Láthatósági kérdések Láthatósági algoritmusok Adott térbeli objektum és adott nézőpont esetén el kell döntenünk, hogy mi látható az adott alakzatból a nézőpontból, vagy irányából nézve. Az algoritmusok
Z-E3215. Beszerelési útmutató BMW
 Z-E3215 Beszerelési útmutató BMW FIGYELEM Kösse a fő csatlakozó kábelt a Z-E3215 készülék hátuljához. Ügyeljen rá, hogy rendesen bepattanjon a helyére. Csatlakoztassa a főkábel mindkét 12-tűs csatlakozóját
Z-E3215 Beszerelési útmutató BMW FIGYELEM Kösse a fő csatlakozó kábelt a Z-E3215 készülék hátuljához. Ügyeljen rá, hogy rendesen bepattanjon a helyére. Csatlakoztassa a főkábel mindkét 12-tűs csatlakozóját
DC motor= egyenáramú motor, villanymotor vezérlése micro:bittel:
 + DC motor= egyenáramú motor, villanymotor vezérlése micro:bittel: A motor egyfajta eszköz, amely az elektromágneses indukció szerint a villamos energiát kinetikus energiává alakíthatja át. Sokféle motor
+ DC motor= egyenáramú motor, villanymotor vezérlése micro:bittel: A motor egyfajta eszköz, amely az elektromágneses indukció szerint a villamos energiát kinetikus energiává alakíthatja át. Sokféle motor
Járműinformatika Bevezetés
 Járműinformatika Bevezetés 2016/2017. tanév, II. félév Dr. Kovács Szilveszter E-mail: [email protected] Informatika Intézet 107/a. Tel: (46) 565-111 / 21-07 Autó elektronika az 1970-es években
Járműinformatika Bevezetés 2016/2017. tanév, II. félév Dr. Kovács Szilveszter E-mail: [email protected] Informatika Intézet 107/a. Tel: (46) 565-111 / 21-07 Autó elektronika az 1970-es években
A., BEMENETI EGYSÉGEK
 Perifériák A., BEMENETI EGYSÉGEK Használatával adatok jutnak el a környezetből a központi feldolgozó egység felé. COPYRIGHT 2017 MIKECZ ZSOLT 2 1., Billentyűzet Adatok (szövegek, számok stb.) bevitelére
Perifériák A., BEMENETI EGYSÉGEK Használatával adatok jutnak el a környezetből a központi feldolgozó egység felé. COPYRIGHT 2017 MIKECZ ZSOLT 2 1., Billentyűzet Adatok (szövegek, számok stb.) bevitelére
International GTE Conference MANUFACTURING 2012. 14-16 November, 2012 Budapest, Hungary. Ákos György*, Bogár István**, Bánki Zsolt*, Báthor Miklós*,
 International GTE Conference MANUFACTURING 2012 14-16 November, 2012 Budapest, Hungary MÉRŐGÉP FEJLESZTÉSE HENGERES MUNKADARABOK MÉRETELLENŐRZÉSÉRE Ákos György*, Bogár István**, Bánki Zsolt*, Báthor Miklós*,
International GTE Conference MANUFACTURING 2012 14-16 November, 2012 Budapest, Hungary MÉRŐGÉP FEJLESZTÉSE HENGERES MUNKADARABOK MÉRETELLENŐRZÉSÉRE Ákos György*, Bogár István**, Bánki Zsolt*, Báthor Miklós*,
GIS Open D GEOSOLUTIONS HUNGARY KFT Váradi Attila: Trimble SX10 Minden az EGYben PREMIER
 GIS Open 2017 3D GEOSOLUTIONS HUNGARY KFT Váradi Attila: Trimble SX10 Minden az EGYben PREMIER 3D Geosolutions Hungary Kft. 3D Geosolutions Hungary Kft. 3D Geosolutions Hungary Kft. Célkitűzésünk Trimble
GIS Open 2017 3D GEOSOLUTIONS HUNGARY KFT Váradi Attila: Trimble SX10 Minden az EGYben PREMIER 3D Geosolutions Hungary Kft. 3D Geosolutions Hungary Kft. 3D Geosolutions Hungary Kft. Célkitűzésünk Trimble
Virtuális hegesztés. A jövő kiképzési módja
 Virtuális hegesztés A jövő kiképzési módja Valósághű tanulás a szimulátorral 100%-ban biztonsági kockázat nélkül Erőforrás takarékos A sikeres oktatócsomag ÁLTALÁNOS TUNDNIVALÓK A jövő hegesztési kiképzésének
Virtuális hegesztés A jövő kiképzési módja Valósághű tanulás a szimulátorral 100%-ban biztonsági kockázat nélkül Erőforrás takarékos A sikeres oktatócsomag ÁLTALÁNOS TUNDNIVALÓK A jövő hegesztési kiképzésének
Gépjármű Diagnosztika. Szabó József Zoltán Főiskolai adjunktus BMF Mechatronika és Autótechnika Intézet
 Gépjármű Diagnosztika Szabó József Zoltán Főiskolai adjunktus BMF Mechatronika és Autótechnika Intézet 14. Előadás Gépjármű kerekek kiegyensúlyozása Kiegyensúlyozatlannak nevezzük azt a járműkereket, illetve
Gépjármű Diagnosztika Szabó József Zoltán Főiskolai adjunktus BMF Mechatronika és Autótechnika Intézet 14. Előadás Gépjármű kerekek kiegyensúlyozása Kiegyensúlyozatlannak nevezzük azt a járműkereket, illetve
ÁGAPRÍTÓ GÉPEK AY 400-10cm AY 600-16cm AY 900-21cm AY 1000-26cm
 ÁGAPRÍTÓ GÉPEK AY 400-10cm AY 600-16cm AY 900-21cm AY 1000-26cm A Volverini gépgyár több mint 20 éve kezdte meg működését. A családi vállalkozásként működő gyár mára a világ számos pontjára szállít mezőgazdasági
ÁGAPRÍTÓ GÉPEK AY 400-10cm AY 600-16cm AY 900-21cm AY 1000-26cm A Volverini gépgyár több mint 20 éve kezdte meg működését. A családi vállalkozásként működő gyár mára a világ számos pontjára szállít mezőgazdasági