Összetett mérési rendszer tervezése
|
|
|
- Norbert Varga
- 9 évvel ezelőtt
- Látták:
Átírás

1 Budapest University of Technology and Economics Összetett mérési rendszer tervezése Elektronikus Eszközök Tanszéke Ender Ferenc mikofluidika.

2 Áttekintés Integrált hardver platform és PC alapú mérésvezérlés A rendszertervezés folyamata Funkcionális rendszerterv, HW-SW szétválasztás Implementációs kérdések: architektúra, sebesség, pontosság Mikrofluidika, Lab-on-a-Chip, mikrofluidikai platformok Mikrofluidikai tesztkörnyezet: rendszertervezés A tápellátás tervezési elvei Architektúra, buszrendszer és kommunikáció Firmware tervezés: vezérlés és állapotgép NI LabVIEW platform Programtervezési minták Szabályzókör kialakítása összetett mérési rendszerben

3 Integrált hardver platform Mérésvezérlés PXI Modular Instrumentation Desktop PC Laptop PC PDA Kommunikációs interfész High-Speed Digitizers High-Resolution Multifunction Dynamic Digitizers and DMMs Data Acquisition Signal Acquisition Instrument Control Digital I/O Counter/ Timers Machine Vision Motion Control DAQ és DSP interfész Signal Conditioning and Switching DUT interfész: szenzorok és beavatkozók Unit Under Test Distributed I/O and Embedded Control


4 PC alapú mérésvezérlés Bemeneti/Kimeneti jelek Jelkondicionáló hardver Adatgyűjtő hardver Analóg Digitális Számláló, Időzítő Érzékelők Beavatkozás Motorok Relék Modul meghajtó hardver ZH Meghajtó- és felhasználói programok

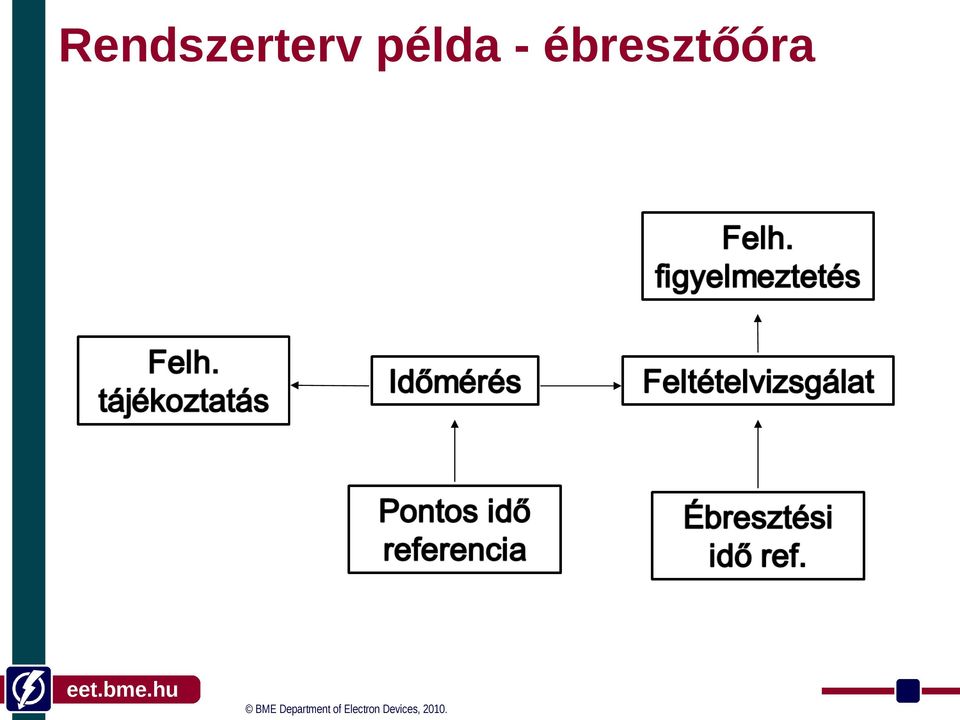
5 A rendszertervezés folyamata Specifikáció A megvalósítandó feladat pontos körülírása Akkor jó, ha a másik fejlesztőcsapat ugyanazt hozza létre! Rendszerterv Az összes megvalósítandó feladatrész blokkokra bontása és az azok közötti kapcsolatok leírása A konkrét implementáció itt még nem eldöntött! ZH

6 Rendszerterv példa - ébresztőóra
7 Rendszertervezés Hardver szoftver szétválasztás Mit milyen platformon érdemes megvalósítani (szoftver, firmware, hardver, kontroller, DAQ, beágyazott rendszer) Specifikációs adatok, költség stb. figyelembevétele ZH
 Specifikációs adatok, költség stb.")
8 Rendszertervezés ZH Funkcionális rendszerterv Hardverre és szoftverre külön alkalmazható A részfeladatok funkciók szerinti lebontását mutatja Bitvonalszám, moduláris felépítés, célhardverek Architektúra terv Célhardverek kiválasztása és összerendelése a becsült számítási igény szerint Elosztott vagy központi intelligencia Autonóm (beprogramozott) működés PC vezérelt működés Távvezérelt működés Belső kommunikációs protokollok
 működés PC vezérelt működés Távvezérelt működés Belső kommunikációs")
9 Sebességbecslés A szükséges számítási kapacitás meghatározói Jelfeldolgozási feladatok Soros vs. párhuzamos végrehajtás Problémaméret és órajel Szabályozási feladatok A szabályozott paraméterek száma A folyamat dinamikája, időállandók A szabályozási kör leglassabb része határozza meg a szabályzás sebességét! Belső kommunikáció Kommunikációs overhead Soros vs. párhuzamos kommunikáció Zavarvédettség Natív átviteli sebesség Ökölszabályok a beavatkozási időre: PC (USART, USB, Ethernet): ~200 ms (!), Belső kommunikáció (SPI, I2C): ~1 us, Mikrovezérlőn belül futó beavatkozó: <1 us ZH
: ~200 ms (!")
10 Bevezetés Mi a mikrofluidika? Minden olyan mikrorendszer mikrofluidikának tekinthető, ahol a rendszerben mozgó folyadékok nem makroszkópikus módon viselkednek A mikrofluidika fő felhasználási területei manapság: Orvosi és kémiai diagnosztika Integrált áramkörök hűtése Nyomtatóipar A mikrofluidikai rendszerek kutatása, tervezése és alkalmazása kapcsán érintett tudományterületek: Villamosmérnök (kutatás és fejlesztés: szenzorok, aktuátorok, technológia) Fizikus (kutatás: a mikrotartomány hatásai) Gépészmérnök (kutatás és tervezés: az áramlás leírása) Orvos és biológus (kutatás és fejlesztés: alkalmazások) 10
 Fizikus (kutatás: a")
 A mikrorendszerek tipikus erősségei (sorozatgyárthatóság, párhuzamosíthatóság, reprodukálhatóság)")
11 Mikro és fluidika Fluidika - tehát folyadékokkal foglalkozó Mikro, ebben a jelentésben legalább egy az alábbiakból: Kis térfogatok (μl, nl, pl) Kis méret (mm, μm) Alacsony energiafelhasználás A mikrotartomány hatásai (lamináris áramlás, felületi feszültség, diffúzió, csatolt hőtranszfer) A mikrorendszerek tipikus erősségei (sorozatgyárthatóság, párhuzamosíthatóság, reprodukálhatóság) 11
")

12 Esettanulmány: Lab-On-a-Chip 12
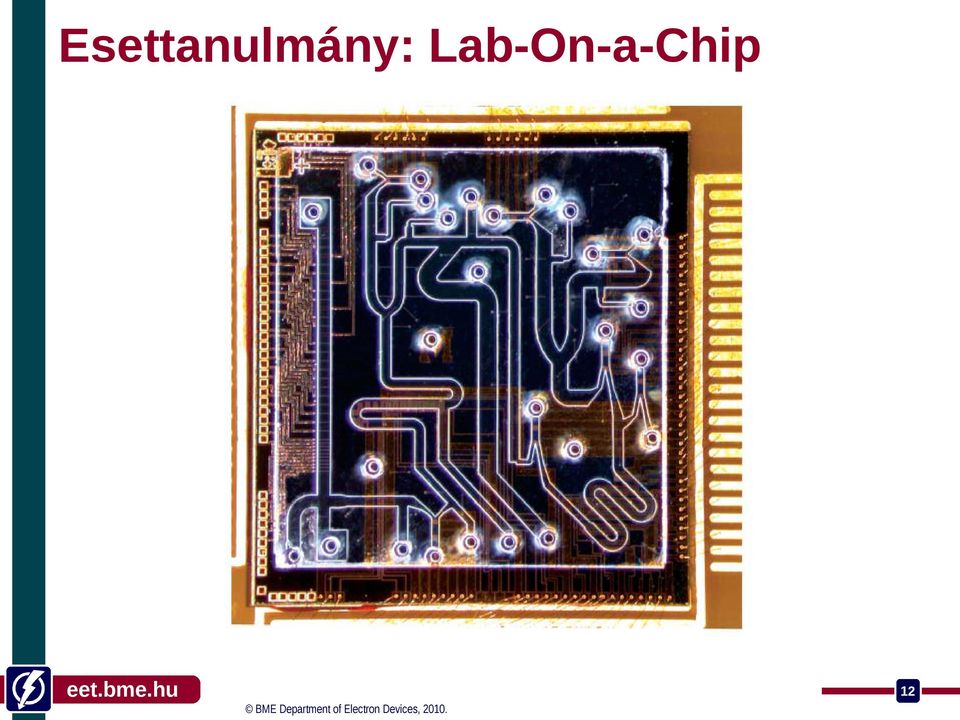

13 Esettanulmány: Lab-On-a-Chip Az influenzavírus kimutatása 240 nl mintából 13


14 Esettanulmány: Lab-On-a-Chip Minta betöltés Polimeráz láncreakció (PCR) Restrikciós enzimes bontás Elektroforézis Villamosmérnöki feladatok Folyamatvezérlés Termikus vezérlés Termikus tervezés Szelepvezérlés Folyadék aktuáció vezérlése 14

 melyeket úgy terveztek, hogy egymással keveredve reakciót végezzenek a reakciók lefolyása a rendszerbe ágyazott")
15 Mikrofluidikai platform Egy mikrofluidikai platform... lehetővé tesz egy sor fluidikai műveletet fluidikai elemeken (reagensek, pufferek) melyeket úgy terveztek, hogy egymással keveredve reakciót végezzenek a reakciók lefolyása a rendszerbe ágyazott szenzorokkal figyelhető a folyamat a platformról, külső vagy belső aktuátorokkal irányítható mindezt jól körülírt és lehetőleg olcsó technológián valósítja meg 15


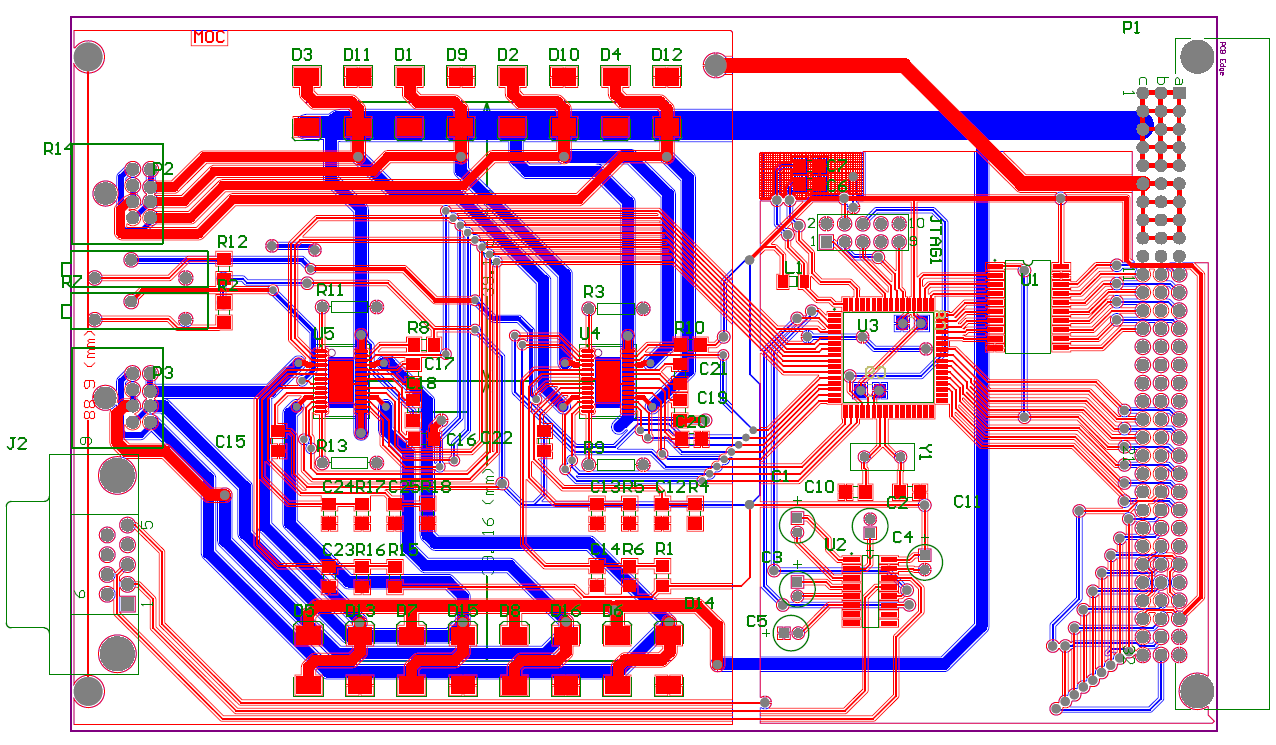
16 Mikrofluidikai tesztkörnyezet

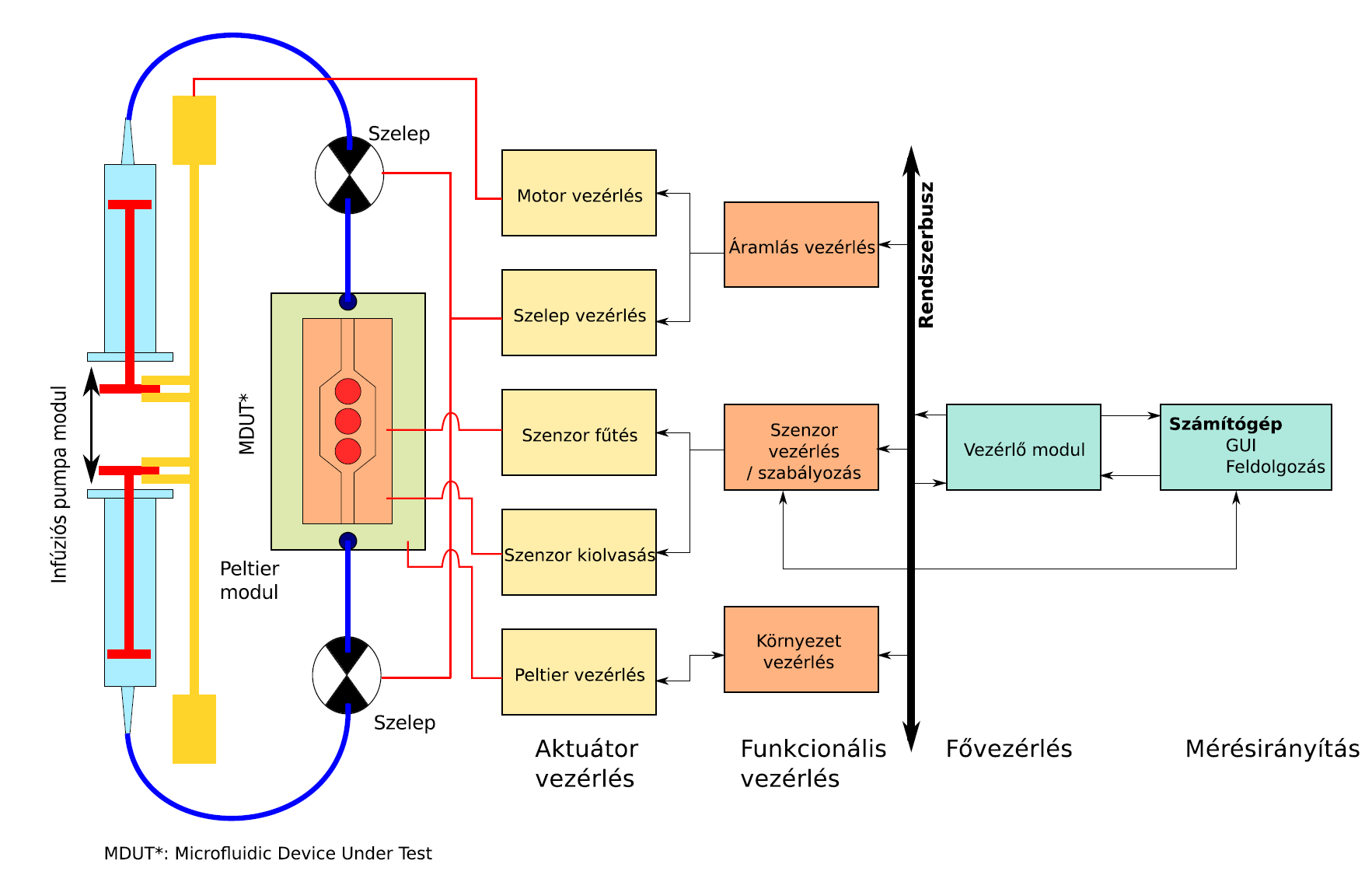
17 Rendszerterv
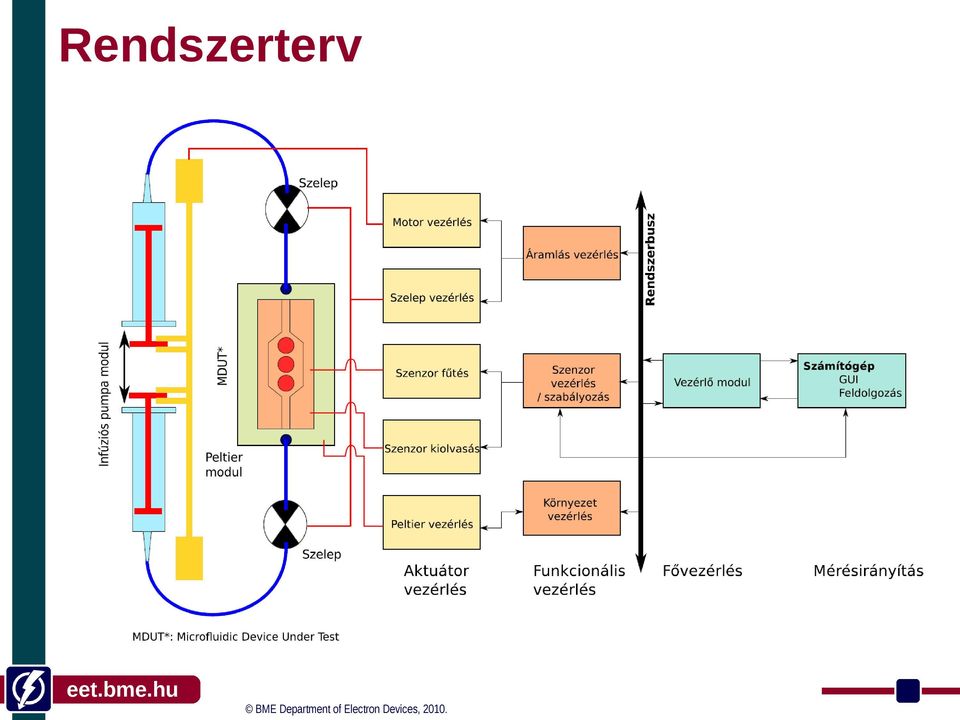
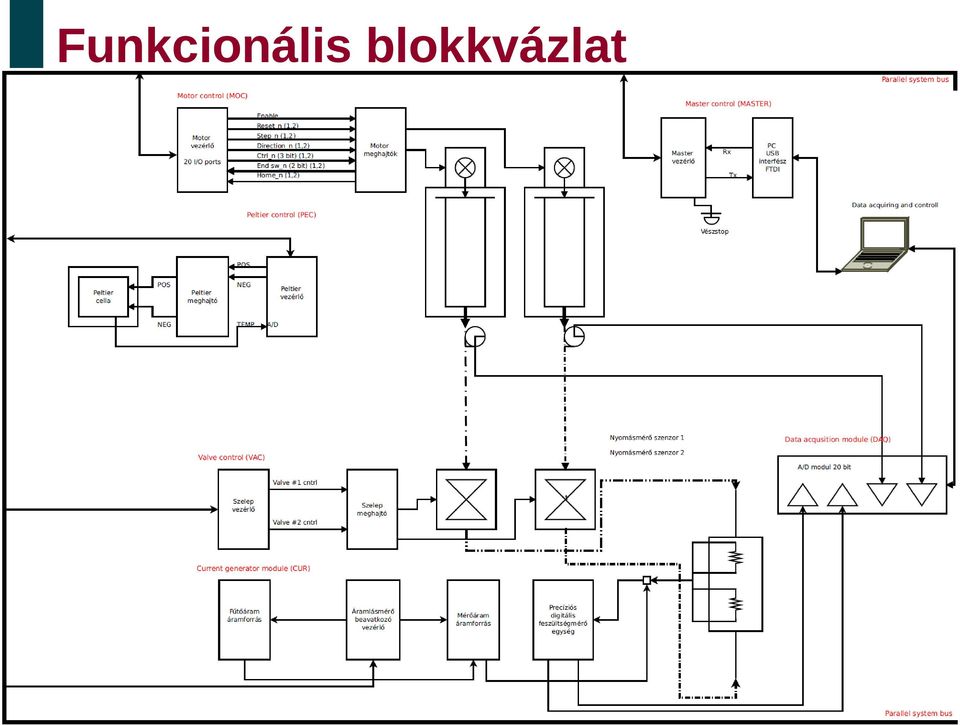
18 Funkcionális blokkvázlat
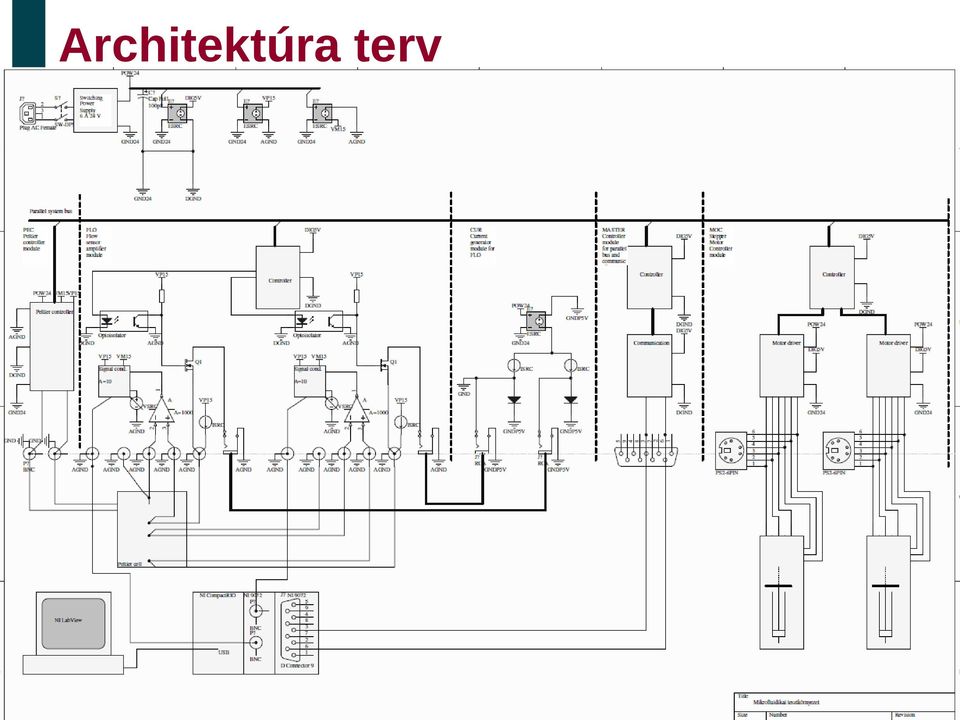
19 Architektúra terv
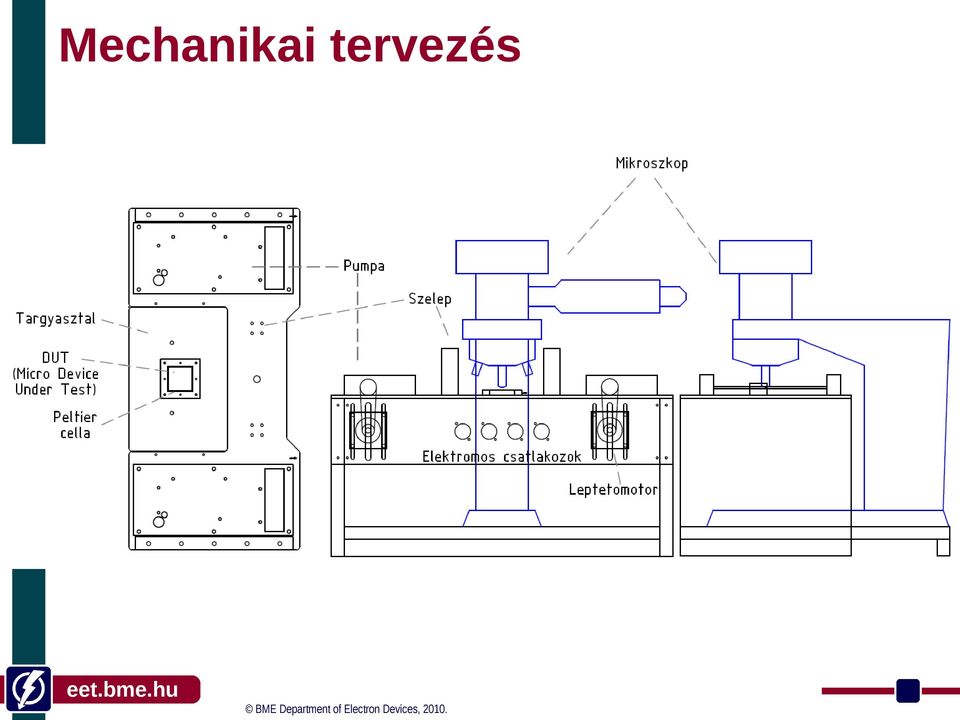
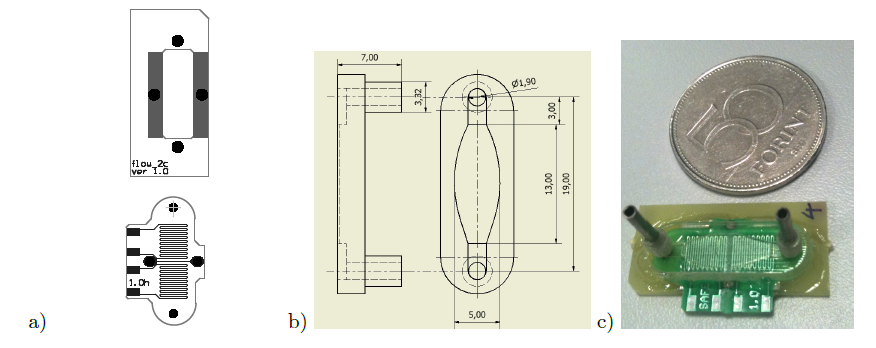
20 Mechanikai tervezés

21 Rendszerplatform IEEE
22 A tápellátás tervezés kérdései Precíziós, analóg áramkörök SNR-jét nagyrészt a tápból beszűrődő zavarok rontják le Digitális és analóg illetve teljesítmény áramkörök mindig külön tápellátásról üzemelnek Igen kritikus analóg részeknél akkumulátoros táplálás is gyakori Nagyáramú/nagyteljesítményű tápellátás méretezésénél a pillanatnyi csúcsteljesítmény fölé kell tervezni! Analóg áramköröknél gyakori igény a szimmetrikus tápfeszültség A különböző tápok földjei az egész rendszerben csak egyetlen ponton kapcsolódhatnak össze! Tápegységek zavarszűrése párhuzamos kerámia és ELKO kondenzátorral Kritikus áramköri részek (IC-k) külön szűrhetők Fontos az elhelyezés a készüléken belül ZH

23 A tápellátás tervezés kérdései ZH
24 Buszrendszer
25 Kommunikáció a buszon

26 Általános kapcsolási séma
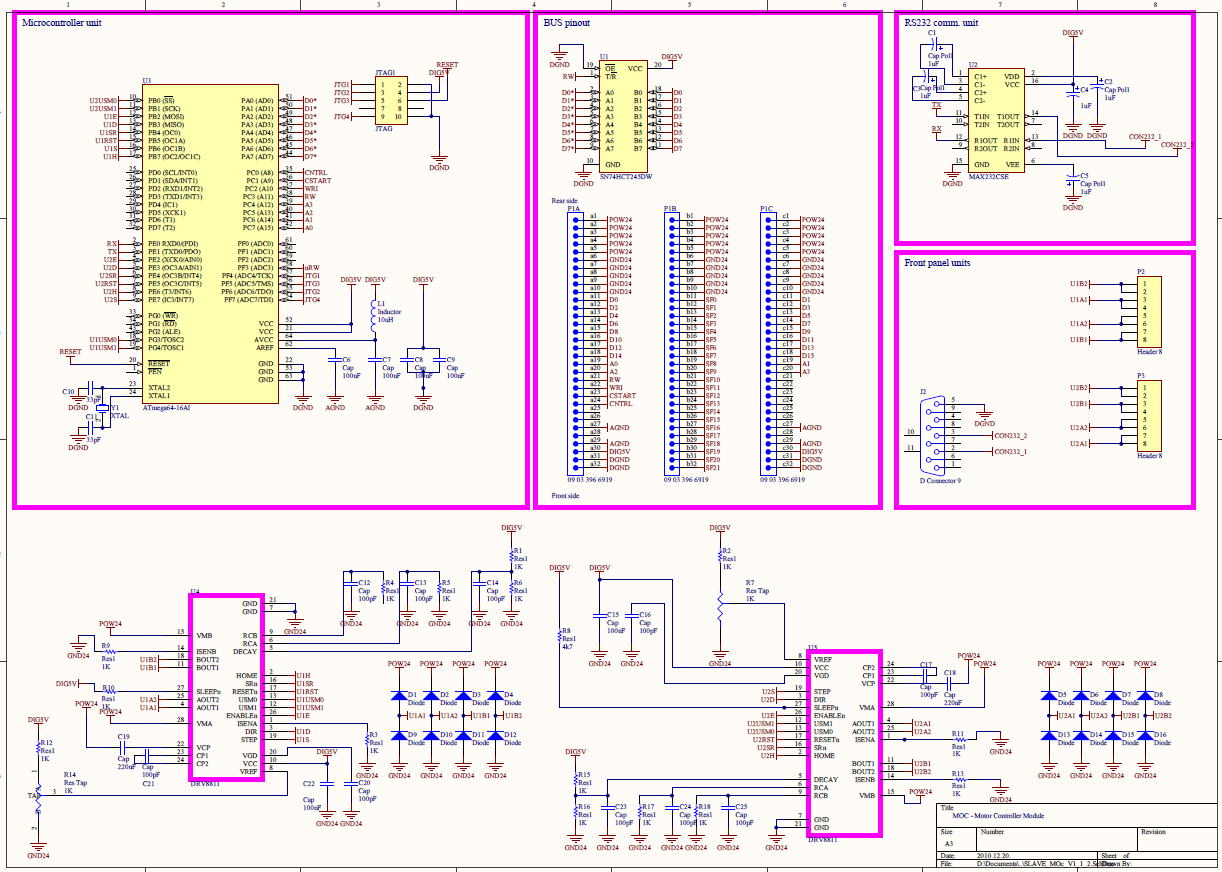
27 Modulspecifikus kapcsolás

28 Általános PCB séma Általános rész Modulspecifikus rész
29 Modulspecifikus kapcsolás

30 Parancsvégrehajtás
31 Parancs és regiszter példa
32 Programvezérlési minták Állapotgép - Állapotkód - Állapot-tranzíciós kód - Állapot-átmeneti feltétel (időzített v. eseményvezérelt) - Mindig szinkron - Nehezen párhuzamósítható ZH
33 Programtervezési minták Master-Slave minta - Egyirányú Adatvesztéses Master szerinti időzítés Nincs bufferelés Slave-k egymástól nem függenek - Slave szinten párhuzamos ZH
34 Programtervezési minták Producer-Consumer minta - Nem biztosított szinkron - Párhuzamosan működtethető - Bufferelt, nincs adatvesztés - Buffer túlcsordulás kérdése ZH
35 Firmware működés vázlata
36 A firmware általános sémája Modul specifikus kód Általános kód (lib) *command[] pointer main.c commandip.c bus.c interrupt parancs vektorok kiválasztás SLAVE mode állapotgép init while(1) parancs vektor MASTER mode állapotgép modulefcn.c usart.c Modul specifikus PC kommunik.
37 Firmware állapotgép ZH
38 Forráskód betekintés
39 A LabVIEW és más programnyelvek LabVIEW = Laboratory Virtual Instrumentation Engineering Workbench A LabVIEW adatfolyam típusú programozási nyelv. Az adatok irányítása két művelet között irányított gráffal történik. Az adatfolyam típusú programnyelvek deklaratívak, tehát (az imperatív nyelvekkel ellentétben) nem az a fontos hogy a dolgok hogyan történnek, hanem az, hogyan kapcsolódnak egymáshoz
40 Imperatív vs. deklaratív programpélda function btn_start_callback(hobject, eventdata, handles) t = 0:pi/20:2*pi; k=0; y = sin(t); h = plot(t,y,'ydatasource','y'); while (get(handles.ck_run,'value')) k=k+0.1; f=get(handles.sl_freq,'value'); y = sin(t.*f+k); refreshdata(h,'caller'); drawnow; pause(.1); end
41 Front panel és Blokk diagram 41
42
43

44 Néhány fontosabb kiegészítő (Toolkit, Modul) Modulációs PID szabályozás Szimulációs Hang és vibráció analízis Virtuális műszerek a mérnöki gyakorlatban (VIEEAV04) 44/23

45 Mikrofluidikai tesztkörnyezet szoftveres rendszerterv
46 Beágyazott állapotgép - Az állapottranzíciókat a felérendelt struktúra határozza meg, így nincs tranzíciós kód Init Time critical requests Wait Read values Action
47 - Esettanulmányok szabályzásokra Szakasz - - Leírása analitikusan, numerikusan, méréssel, identifikációval A szakasz időállandói határozzák meg a szabályozó köridejét Helyes működésnél a szabályozó körideje kisebb a szakasz időállandójánál. Szabályozó - A szakaszhoz és a feladathoz illeszkedik Ha a szakasz változik, a szabályozó is változhat (adaptív szabályozó, pl. Fuzzy szabályozó) A szabályozó periódusideje a kör periódusidejével egyenlő Implementáció: hardveresen (pl. műveleti erősítőből épített integráló), szoftveresen (PC-n, uc-n, FPGA-n) Az implementációs platform kiválasztásánál a sebesség és a számítási igény a meghatározó Számításigény Kis periódusidő Nagy pediódusidő Alacsony Mikrokontroller / Analóg ák. PC (LabVIEW) / Analóg ák. Magas FPGA / DSP PC (LabVIEW) ZH
48 Esettanulmányok szabályzásokra Szenzor és beavatkozó A szenzor válaszideje a kör periódusidejénél kisebb Szenzor kiolvasás, A/D, adatátvitel kérdése, bufferelés Szenzor jelének feldolgozása: egyszerűbb esetben analóg szűrés Számításigényes esetben (digitális szűrés, képfeldolgozás) célhardveren célszerű implementálni Beavatkozás módja: folyamatos v. diszkrét idejű Adatátvitel Megszabja az implementációt: folytonos v. diszkrét Fix késleltetésű adatátvitel, kompenzáció: Smith prediktor ZH

49 1. Hidrodinamikai fókusz szabályzása

50 Hidrodinamikai fókusz szabályzása
51 Hidrodinamikai fókusz szabályzása ZH Képfeldolgozási algoritmus implementálása a célhardveren a szenzorjel előállításához, szabályozó a PC-n fut. Megvalósítási platform Megvalósítási platform A szakasz időállandója kb. 300 ms, így a PC-n futó szabályozó még éppen használható. A szenzor jel előállítása viszont számításigényes, az ehhez szükséges képfeldolgozási algoritmus a SmartCamera processzorában fut.
52 Identifikáció modellillesztéssel
53 Forráskód betekintés és videó
54 Áramlásszenzor szabályzása A szakasz időállandója kb. 50 ms, így a szabályozó megvalósítási platformja a modult vezérlő mikrokontroller. Így megoldható a ~1 ms szabályozási köridő.
55 Áramlásszenzor
56 Áramlásszenzor szabályzása Identifikáció szimulációval
57 Áramlásszenzor szabályzása Nagysebességű szabályozás mikrokontrollerel, adaptív paraméterállítás LabVIEW-ből Megvalósítási platform ZH
58 Időmultiplexált érzékelés és beavatkozás
59 Időmultiplexált érzékelés és beavatkozás
60 Áramlásszenzor karakterisztika
61 Forráskód betekintés
62 Nyomástranziens korrekció
63 Nyomástranziens korrekció Adatgyűjtés nagyfelbontású A/D-vel crio-n keresztül Megvalósítási platform ZH
64 Nyomástranziens korrekció Identifikáció méréssel A szakasz időállandója kb. 8 sec, így a szabályozó megvalósítási platformja a PC-s LabVIEW vezérlő, illetve abban megvalósított PID szabályozó. A szabályozó körideje kb. 200 msec.
65 A szabályozó működése
66 Forráskód betekintés
67 ZH példa ZH Egy mini - klímakamra vezérlőjét készíti el. A kamra időállandója 120 sec, a hőmérsékletmérést 0.05 oc pontossággal valósítják meg egy műveleti erősítővel A=500 erősítés mellett. A kamra 300 W-os, 24V-os fűtése egy relével ki-be kapcsolható. A vezérlő egy PC-s mérésvezérlő rendszerre csatlakozik, ahol a célhőmérséklet beállítható. a) Rajzolja fel a berendezés rendszertervét. b) Adjon javaslatot a rendszer tápellátásának kialakítására. c) Az időzítési kritériumok figyelembevételével adjon javaslatot a szabályozó megvalósítási platformjára és jelölje a rendszerterven.
Mikrofluidika I. - Alapok
 Budapest Műszaki és Gazdaságtudományi Egyetem Mikro és nanotechnika Mikrofluidika I. - Alapok Elektronikus Eszközök Tanszéke www. Ender Ferenc ender@ 1. előadás Bevezetés Mikrofluidikai hatások, arányos
Budapest Műszaki és Gazdaságtudományi Egyetem Mikro és nanotechnika Mikrofluidika I. - Alapok Elektronikus Eszközök Tanszéke www. Ender Ferenc ender@ 1. előadás Bevezetés Mikrofluidikai hatások, arányos
IoT alapú mezőgazdasági adatgyűjtő prototípus fejlesztési tapasztalatok
 IoT alapú mezőgazdasági adatgyűjtő prototípus fejlesztési tapasztalatok 2016.05.19. Szilágyi Róbert Tóth Mihály Debreceni Egyetem Az IoT Eszközök és más fizikai objektumok elektronikával, vezérléssel,
IoT alapú mezőgazdasági adatgyűjtő prototípus fejlesztési tapasztalatok 2016.05.19. Szilágyi Róbert Tóth Mihály Debreceni Egyetem Az IoT Eszközök és más fizikai objektumok elektronikával, vezérléssel,
Szükséges ismeretek: C programozási nyelv; mikrokontrollerek; méréstechnika; analóg és digitális elektronika; LabView
 Pozícióérzékelés szilárd közegben terjedő akusztikus jelek segítségével Ha egy szilárd közeg egy pontján akusztikus jelet keltünk, az a közegben szétterjed és annak több pontján detektálható. A közeg (például
Pozícióérzékelés szilárd közegben terjedő akusztikus jelek segítségével Ha egy szilárd közeg egy pontján akusztikus jelet keltünk, az a közegben szétterjed és annak több pontján detektálható. A közeg (például
SZENZORMODUL ILLESZTÉSE LEGO NXT PLATFORMHOZ. Készítette: Horváth András MSc Önálló laboratórium 2 Konzulens: Orosz György
 SZENZORMODUL ILLESZTÉSE LEGO NXT PLATFORMHOZ Készítette: Horváth András MSc Önálló laboratórium 2 Konzulens: Orosz György BEVEZETÉS Simonyi Károly szakkollégium LEGO és robotika kör NXT Cél: Választott
SZENZORMODUL ILLESZTÉSE LEGO NXT PLATFORMHOZ Készítette: Horváth András MSc Önálló laboratórium 2 Konzulens: Orosz György BEVEZETÉS Simonyi Károly szakkollégium LEGO és robotika kör NXT Cél: Választott
Szárazföldi autonóm mobil robotok vezérlőrendszerének kialakítási lehetőségei. Kucsera Péter ZMNE Doktorandusz
 Szárazföldi autonóm mobil robotok vezérlőrendszerének kialakítási lehetőségei. Kucsera Péter ZMNE Doktorandusz A mobil robot vezérlőrendszerének feladatai Elvégzendő feladat Kommunikáció Vezérlő rendszer
Szárazföldi autonóm mobil robotok vezérlőrendszerének kialakítási lehetőségei. Kucsera Péter ZMNE Doktorandusz A mobil robot vezérlőrendszerének feladatai Elvégzendő feladat Kommunikáció Vezérlő rendszer
MINTA Írásbeli Záróvizsga Mechatronikai mérnök MSc. Debrecen,
 MINTA Írásbeli Záróvizsga Mechatronikai mérnök MSc Debrecen, 2017. 01. 03. Név: Neptun kód: Megjegyzések: A feladatok megoldásánál használja a géprajz szabályait, valamint a szabványos áramköri elemeket.
MINTA Írásbeli Záróvizsga Mechatronikai mérnök MSc Debrecen, 2017. 01. 03. Név: Neptun kód: Megjegyzések: A feladatok megoldásánál használja a géprajz szabályait, valamint a szabványos áramköri elemeket.
ÉRZÉKELŐK ÉS BEAVATKOZÓK I. 0. TANTÁRGY ISMERTETŐ
 ÉRZÉKELŐK ÉS BEAVATKOZÓK I. 0. TANTÁRGY ISMERTETŐ Dr. Soumelidis Alexandros 2018.09.06. BME KÖZLEKEDÉSMÉRNÖKI ÉS JÁRMŰMÉRNÖKI KAR 32708-2/2017/INTFIN SZÁMÚ EMMI ÁLTAL TÁMOGATOTT TANANYAG A tárgy célja
ÉRZÉKELŐK ÉS BEAVATKOZÓK I. 0. TANTÁRGY ISMERTETŐ Dr. Soumelidis Alexandros 2018.09.06. BME KÖZLEKEDÉSMÉRNÖKI ÉS JÁRMŰMÉRNÖKI KAR 32708-2/2017/INTFIN SZÁMÚ EMMI ÁLTAL TÁMOGATOTT TANANYAG A tárgy célja
Nagy Gergely április 4.
 Mikrovezérlők Nagy Gergely BME EET 2012. április 4. ebook ready 1 Bevezetés Áttekintés Az elektronikai tervezés eszközei Mikroprocesszorok 2 A mikrovezérlők 3 Főbb gyártók Áttekintés A mikrovezérlők az
Mikrovezérlők Nagy Gergely BME EET 2012. április 4. ebook ready 1 Bevezetés Áttekintés Az elektronikai tervezés eszközei Mikroprocesszorok 2 A mikrovezérlők 3 Főbb gyártók Áttekintés A mikrovezérlők az
Programozó- készülék Kezelőkozol RT óra (pl. PC) Digitális bemenetek ROM memória Digitális kimenetek RAM memória Analóg bemenet Analóg kimenet
 Digitális bemenetek ROM memória Digitális kimenetek RAM memória Analóg bemenet Analóg kimenet") 2. ZH A csoport 1. Hogyan adható meg egy digitális műszer pontossága? (3p) Digitális műszereknél a pontosságot két adattal lehet megadni: Az osztályjel ±%-os értékével, és a ± digit értékkel (jellemző
2. ZH A csoport 1. Hogyan adható meg egy digitális műszer pontossága? (3p) Digitális műszereknél a pontosságot két adattal lehet megadni: Az osztályjel ±%-os értékével, és a ± digit értékkel (jellemző
Betekintés a gépek állapot felügyeletére kifejlesztett DAQ rendszerbe
 BEMUTATÓ Bevezetés a virtuális műszerezés világába A DAQ rendszer alkotóelemei Hardveres lehetőségek NI jelfolyam technológia Szoftveres lehetőségek Betekintés a gépek állapot felügyeletére kifejlesztett
BEMUTATÓ Bevezetés a virtuális műszerezés világába A DAQ rendszer alkotóelemei Hardveres lehetőségek NI jelfolyam technológia Szoftveres lehetőségek Betekintés a gépek állapot felügyeletére kifejlesztett
Mérés, Vezérlés. mérésadat rögzítés CMC - 99 CMC kis és nagytestvér
 Mérés, Vezérlés mérésadat rögzítés CMC - 99 CMC - 141 kis és nagytestvér Bevezetés A MultiCon eszközök nagyhatékonyságú kijelzőt, mérés adatgyűjtőt és szabályzókat foglalnak magukban. Mindez a tudás és
Mérés, Vezérlés mérésadat rögzítés CMC - 99 CMC - 141 kis és nagytestvér Bevezetés A MultiCon eszközök nagyhatékonyságú kijelzőt, mérés adatgyűjtőt és szabályzókat foglalnak magukban. Mindez a tudás és
Laboratóriumi műszerek megvalósítása ARM alapú mikrovezérlővel és Linux-szal
 Laboratóriumi műszerek megvalósítása ARM alapú mikrovezérlővel és Linux-szal Fuszenecker Róbert Budapesti Műszaki Főiskola Kandó Kálmán Műszaki Főiskolai Kar 2007. október 17. Laboratóriumi berendezések
Laboratóriumi műszerek megvalósítása ARM alapú mikrovezérlővel és Linux-szal Fuszenecker Róbert Budapesti Műszaki Főiskola Kandó Kálmán Műszaki Főiskolai Kar 2007. október 17. Laboratóriumi berendezések
2. rész PC alapú mérőrendszer esetén hogyan történhet az adatok kezelése? Írjon pár 2-2 jellemző is az egyes esetekhez.
 Méréselmélet és mérőrendszerek (levelező) Kérdések - 2. előadás 1. rész Írja fel a hiba fogalmát és hogyan számítjuk ki? Hogyan számítjuk ki a relatív hibát? Mit tud a rendszeres hibákról és mi az okozója
Méréselmélet és mérőrendszerek (levelező) Kérdések - 2. előadás 1. rész Írja fel a hiba fogalmát és hogyan számítjuk ki? Hogyan számítjuk ki a relatív hibát? Mit tud a rendszeres hibákról és mi az okozója
USB adatgyűjtő eszközök és programozásuk Mérő- és adatgyűjtő rendszerek
 USB adatgyűjtő eszközök és programozásuk Mérő- és s adatgyűjt jtő rendszerek Az USB kialakulása Az USB felépítése Az USB tulajdonságai USB eszközök Áttekintés USB eszközök programozása 2 Az USB kialakulása
USB adatgyűjtő eszközök és programozásuk Mérő- és s adatgyűjt jtő rendszerek Az USB kialakulása Az USB felépítése Az USB tulajdonságai USB eszközök Áttekintés USB eszközök programozása 2 Az USB kialakulása
Mikrorendszerek tervezése
 BUDAPESTI MŰSZAKI ÉS GAZDASÁGTUDOMÁNYI EGYETEM VILLAMOSMÉRNÖKI ÉS INFORMATIKAI KAR MÉRÉSTECHNIKA ÉS INFORMÁCIÓS RENDSZEREK TANSZÉK Mikrorendszerek tervezése Beágyazott rendszerek Fehér Béla Raikovich Tamás
BUDAPESTI MŰSZAKI ÉS GAZDASÁGTUDOMÁNYI EGYETEM VILLAMOSMÉRNÖKI ÉS INFORMATIKAI KAR MÉRÉSTECHNIKA ÉS INFORMÁCIÓS RENDSZEREK TANSZÉK Mikrorendszerek tervezése Beágyazott rendszerek Fehér Béla Raikovich Tamás
Tartalomjegyzék. Előszó... xi. 1. Bevezetés... 1. 2. Mechanikai, elektromos és logikai jellemzők... 13
 Előszó... xi 1. Bevezetés... 1 1.1. Fogalmak, definíciók... 1 1.1.1. Mintapéldák... 2 1.1.1.1. Mechanikus kapcsoló illesztése... 2 1.1.1.2. Nyomtató illesztése... 3 1.1.1.3. Katódsugárcsöves kijelző (CRT)
Előszó... xi 1. Bevezetés... 1 1.1. Fogalmak, definíciók... 1 1.1.1. Mintapéldák... 2 1.1.1.1. Mechanikus kapcsoló illesztése... 2 1.1.1.2. Nyomtató illesztése... 3 1.1.1.3. Katódsugárcsöves kijelző (CRT)
Témakiírások 2014/15. őszi félévben
 Témakiírások 2014/15. őszi félévben Témavezető: Dr. Vörösházi Zsolt voroshazi@vision.vein.hu voroshazi.zsolt@virt.uni-pannon.hu Veszprém, 2014. szeptember 9. Témaismertetés #1 National Instruments - LabView
Témakiírások 2014/15. őszi félévben Témavezető: Dr. Vörösházi Zsolt voroshazi@vision.vein.hu voroshazi.zsolt@virt.uni-pannon.hu Veszprém, 2014. szeptember 9. Témaismertetés #1 National Instruments - LabView
Az irányítástechnika alapfogalmai. 2008.02.15. Irányítástechnika MI BSc 1
 Az irányítástechnika alapfogalmai 2008.02.15. 1 Irányítás fogalma irányítástechnika: önműködő irányítás törvényeivel és gyakorlati megvalósításával foglakozó műszaki tudomány irányítás: olyan művelet,
Az irányítástechnika alapfogalmai 2008.02.15. 1 Irányítás fogalma irányítástechnika: önműködő irányítás törvényeivel és gyakorlati megvalósításával foglakozó műszaki tudomány irányítás: olyan művelet,
Elvonatkoztatási szintek a digitális rendszertervezésben
 Budapest Műszaki és Gazdaságtudományi Egyetem Elvonatkoztatási szintek a digitális rendszertervezésben Elektronikus Eszközök Tanszéke eet.bme.hu Rendszerszintű tervezés BMEVIEEM314 Horváth Péter 2013 Rendszerszint
Budapest Műszaki és Gazdaságtudományi Egyetem Elvonatkoztatási szintek a digitális rendszertervezésben Elektronikus Eszközök Tanszéke eet.bme.hu Rendszerszintű tervezés BMEVIEEM314 Horváth Péter 2013 Rendszerszint
Irányítástechnikai alapok. Zalotay Péter főiskolai docens KKMF
 Irányítástechnikai alapok Zalotay Péter főiskolai docens KKMF Az irányítás feladatai és fajtái: Alapfogalmak Irányítás: Műszaki berendezések ( gépek, gyártó sorok, szállító eszközök, vegyi-, hő-technikai
Irányítástechnikai alapok Zalotay Péter főiskolai docens KKMF Az irányítás feladatai és fajtái: Alapfogalmak Irányítás: Műszaki berendezések ( gépek, gyártó sorok, szállító eszközök, vegyi-, hő-technikai
Digitális technika VIMIAA01 9. hét Fehér Béla BME MIT
 BUDAPESTI MŰSZAKI ÉS GAZDASÁGTUDOMÁNYI EGYETEM VILLAMOSMÉRNÖKI ÉS INFORMATIKAI KAR MÉRÉSTECHNIKA ÉS INFORMÁCIÓS RENDSZEREK TANSZÉK Digitális technika VIMIAA01 9. hét Fehér Béla BME MIT Eddig Tetszőleges
BUDAPESTI MŰSZAKI ÉS GAZDASÁGTUDOMÁNYI EGYETEM VILLAMOSMÉRNÖKI ÉS INFORMATIKAI KAR MÉRÉSTECHNIKA ÉS INFORMÁCIÓS RENDSZEREK TANSZÉK Digitális technika VIMIAA01 9. hét Fehér Béla BME MIT Eddig Tetszőleges
Digitális technika VIMIAA01 9. hét
 BUDAPESTI MŰSZAKI ÉS GAZDASÁGTUDOMÁNYI EGYETEM VILLAMOSMÉRNÖKI ÉS INFORMATIKAI KAR MÉRÉSTECHNIKA ÉS INFORMÁCIÓS RENDSZEREK TANSZÉK Digitális technika VIMIAA01 9. hét Fehér Béla BME MIT Eddig Tetszőleges
BUDAPESTI MŰSZAKI ÉS GAZDASÁGTUDOMÁNYI EGYETEM VILLAMOSMÉRNÖKI ÉS INFORMATIKAI KAR MÉRÉSTECHNIKA ÉS INFORMÁCIÓS RENDSZEREK TANSZÉK Digitális technika VIMIAA01 9. hét Fehér Béla BME MIT Eddig Tetszőleges
Digitális eszközök típusai
 Digitális eszközök típusai A digitális eszközök típusai Digitális rendszer fogalma Több minden lehet digitális rendszer Jelen esetben digitális integrált áramköröket értünk a digitális rendszerek alatt
Digitális eszközök típusai A digitális eszközök típusai Digitális rendszer fogalma Több minden lehet digitális rendszer Jelen esetben digitális integrált áramköröket értünk a digitális rendszerek alatt
MEMS eszközök redukált rendű modellezése a Smart Systems Integration mesterképzésben Dr. Ender Ferenc
 MEMS eszközök redukált rendű modellezése a Smart Systems Integration mesterképzésben Dr. Ender Ferenc BME Elektronikus Eszközök Tanszéke Smart Systems Integration EMMC+ Az EU által támogatott 2 éves mesterképzési
MEMS eszközök redukált rendű modellezése a Smart Systems Integration mesterképzésben Dr. Ender Ferenc BME Elektronikus Eszközök Tanszéke Smart Systems Integration EMMC+ Az EU által támogatott 2 éves mesterképzési
Quadkopter szimulációja LabVIEW környezetben Simulation of a Quadcopter with LabVIEW
 Quadkopter szimulációja LabVIEW környezetben Simulation of a Quadcopter with LabVIEW T. KISS 1 P. T. SZEMES 2 1University of Debrecen, kiss.tamas93@gmail.com 2University of Debrecen, szemespeter@eng.unideb.hu
Quadkopter szimulációja LabVIEW környezetben Simulation of a Quadcopter with LabVIEW T. KISS 1 P. T. SZEMES 2 1University of Debrecen, kiss.tamas93@gmail.com 2University of Debrecen, szemespeter@eng.unideb.hu
ÖNÁLLÓ LABOR Mérésadatgyűjtő rendszer tervezése és implementációja
 ÖNÁLLÓ LABOR Mérésadatgyűjtő rendszer tervezése és implementációja Nagy Mihály Péter 1 Feladat ismertetése Általános célú (univerzális) digitális mérőműszer elkészítése Egy- vagy többcsatornás feszültségmérés
ÖNÁLLÓ LABOR Mérésadatgyűjtő rendszer tervezése és implementációja Nagy Mihály Péter 1 Feladat ismertetése Általános célú (univerzális) digitális mérőműszer elkészítése Egy- vagy többcsatornás feszültségmérés
Aktív zajcsökkentést demonstráló rendszer továbbfejlesztése. Csofcsics Donát Gusztáv Tamás
 Aktív zajcsökkentést demonstráló rendszer továbbfejlesztése Csofcsics Donát Gusztáv Tamás Előző félévben végzett munka Szenzorhálózattal működő többcsatornás zajcsökkentő rendszer megismerése Berkeley
Aktív zajcsökkentést demonstráló rendszer továbbfejlesztése Csofcsics Donát Gusztáv Tamás Előző félévben végzett munka Szenzorhálózattal működő többcsatornás zajcsökkentő rendszer megismerése Berkeley
Gingl Zoltán, Szeged, 2015. 2015.09.29. 19:14 Elektronika - Alapok
 Gingl Zoltán, Szeged, 2015. 1 2 Az előadás diasora (előre elérhető a teljes anyag, fejlesztések mindig történnek) Könyv: Török Miklós jegyzet Tiezte, Schenk, könyv interneten elérhető anyagok Laborjegyzet,
Gingl Zoltán, Szeged, 2015. 1 2 Az előadás diasora (előre elérhető a teljes anyag, fejlesztések mindig történnek) Könyv: Török Miklós jegyzet Tiezte, Schenk, könyv interneten elérhető anyagok Laborjegyzet,
Élettartam teszteknél alkalmazott programstruktúra egy váltóvezérlő példáján keresztül
 Élettartam teszteknél alkalmazott programstruktúra egy váltóvezérlő példáján keresztül 1 Tartalom Miről is lesz szó? Bosch GS-TC Automata sebességváltó TCU (Transmission Control Unit) Élettartam tesztek
Élettartam teszteknél alkalmazott programstruktúra egy váltóvezérlő példáján keresztül 1 Tartalom Miről is lesz szó? Bosch GS-TC Automata sebességváltó TCU (Transmission Control Unit) Élettartam tesztek
FPGA áramkörök alkalmazásainak vizsgálata
 FPGA áramkörök alkalmazásainak vizsgálata Kutatási beszámoló a Pro Progressio alapítvány számára Raikovich Tamás, 2012. 1 Bevezetés A programozható logikai áramkörökön (FPGA) alapuló hardver gyorsítók
FPGA áramkörök alkalmazásainak vizsgálata Kutatási beszámoló a Pro Progressio alapítvány számára Raikovich Tamás, 2012. 1 Bevezetés A programozható logikai áramkörökön (FPGA) alapuló hardver gyorsítók
National Instruments
 National Instruments Számítógép Alapú Mérőműszerezés és Automatizálás Péter Attila attila.peter@ni.com www.ni.com/hungary Tartalom National Instruments bemutatása A számítógép alapú méréstechnika LabVIEW
National Instruments Számítógép Alapú Mérőműszerezés és Automatizálás Péter Attila attila.peter@ni.com www.ni.com/hungary Tartalom National Instruments bemutatása A számítógép alapú méréstechnika LabVIEW
VTOL UAV. Moduláris fedélzeti elektronika fejlesztése pilóta nélküli repülőgépek számára. Árvai László, Doktorandusz, ZMNE ÁRVAI LÁSZLÓ, ZMNE
 Moduláris fedélzeti elektronika fejlesztése pilóta nélküli repülőgépek számára Árvai László, Doktorandusz, ZMNE Tartalom Fejezet Témakör 1. Fedélzeti elektronika tulajdonságai 2. Modularitás 3. Funkcionális
Moduláris fedélzeti elektronika fejlesztése pilóta nélküli repülőgépek számára Árvai László, Doktorandusz, ZMNE Tartalom Fejezet Témakör 1. Fedélzeti elektronika tulajdonságai 2. Modularitás 3. Funkcionális
LabVIEW példák és bemutatók KÉSZÍTETTE: DR. FÜVESI VIKTOR
 LabVIEW példák és bemutatók KÉSZÍTETTE: DR. FÜVESI VIKTOR LabVIEW-ról National Instruments (NI) által fejlesztett Grafikus programfejlesztő környezet, méréstechnikai, vezérlési, jelfeldolgozási feladatok
LabVIEW példák és bemutatók KÉSZÍTETTE: DR. FÜVESI VIKTOR LabVIEW-ról National Instruments (NI) által fejlesztett Grafikus programfejlesztő környezet, méréstechnikai, vezérlési, jelfeldolgozási feladatok
LabView Academy. 4. óra párhuzamos programozás
 LabView Academy 4. óra párhuzamos programozás Ellenőrző kérdések Hogyan lehet letiltani az automatikus hibakezelés funkciót? a) Engedélyezzük az Execution highlighting ot b) A subvi error out cluster-jét
LabView Academy 4. óra párhuzamos programozás Ellenőrző kérdések Hogyan lehet letiltani az automatikus hibakezelés funkciót? a) Engedélyezzük az Execution highlighting ot b) A subvi error out cluster-jét
Villamos jelek mintavételezése, feldolgozása. Mérésadatgyűjtés, jelfeldolgozás 9. előadás
 Villamos jelek mintavételezése, feldolgozása (ellenállás mérés LabVIEW támogatással) Számítógépes mérőrendszerek Mérésadatgyűjtés, jelfeldolgozás 9. előadás Dr. Iványi Miklósné, egyetemi tanár Schiffer
Villamos jelek mintavételezése, feldolgozása (ellenállás mérés LabVIEW támogatással) Számítógépes mérőrendszerek Mérésadatgyűjtés, jelfeldolgozás 9. előadás Dr. Iványi Miklósné, egyetemi tanár Schiffer
ARM Cortex magú mikrovezérlők. mbed
 ARM Cortex magú mikrovezérlők mbed Scherer Balázs Budapest University of Technology and Economics Department of Measurement and Information Systems BME-MIT 2016 MBED webes fejlesztőkörnyezet 2009-ben megjelent
ARM Cortex magú mikrovezérlők mbed Scherer Balázs Budapest University of Technology and Economics Department of Measurement and Information Systems BME-MIT 2016 MBED webes fejlesztőkörnyezet 2009-ben megjelent
Mérés és adatgyűjtés
 Mérés és adatgyűjtés 4. óra - levelező Mingesz Róbert Szegedi Tudományegyetem 2011. március 18. MA lev - 4. óra Verzió: 1.3 Utolsó frissítés: 2011. május 15. 1/51 Tartalom I 1 A/D konverterek alkalmazása
Mérés és adatgyűjtés 4. óra - levelező Mingesz Róbert Szegedi Tudományegyetem 2011. március 18. MA lev - 4. óra Verzió: 1.3 Utolsó frissítés: 2011. május 15. 1/51 Tartalom I 1 A/D konverterek alkalmazása
Űrtechnológia október 24. Műholdfedélzeti energiaellátás / 2 Műholdfedélzeti szolgálati rendszerek Felügyeleti, telemetria és telekommand rendsz
 Szélessávú Hírközlés és Villamosságtan Tanszék Űrkutató Csoport Szabó József A fedélzeti energiaellátás kérdései: architektúrák, energiaegyensúly. Űrtechnológia Budapest, 2018. október 24. Űrtechnológia
Szélessávú Hírközlés és Villamosságtan Tanszék Űrkutató Csoport Szabó József A fedélzeti energiaellátás kérdései: architektúrák, energiaegyensúly. Űrtechnológia Budapest, 2018. október 24. Űrtechnológia
Mérés és adatgyűjtés
 Mérés és adatgyűjtés 9. óra Mingesz Róbert Szegedi Tudományegyetem 2012. április 2. MA - 9. óra Verzió: 2.1 Utolsó frissítés: 2012. április 2. 1/42 Tartalom I 1 További műszerek 2 Multifinkciós műszerek
Mérés és adatgyűjtés 9. óra Mingesz Róbert Szegedi Tudományegyetem 2012. április 2. MA - 9. óra Verzió: 2.1 Utolsó frissítés: 2012. április 2. 1/42 Tartalom I 1 További műszerek 2 Multifinkciós műszerek
ATMEL ATMEGA MIKROVEZÉRLŐ-CSALÁD
 Misák Sándor ATMEL ATMEGA MIKROVEZÉRLŐ-CSALÁD Nanoelektronikai és Nanotechnológiai Részleg DE TTK v.0.1 (2007.02.13.) 1. előadás 1. Általános ismeretek. 2. Sajátos tulajdonságok. 3. A processzor jellemzői.
Misák Sándor ATMEL ATMEGA MIKROVEZÉRLŐ-CSALÁD Nanoelektronikai és Nanotechnológiai Részleg DE TTK v.0.1 (2007.02.13.) 1. előadás 1. Általános ismeretek. 2. Sajátos tulajdonságok. 3. A processzor jellemzői.
RUBICON Serial IO kártya
 RUBICON Serial IO kártya Műszaki leírás 1.0 Készítette: Forrai Attila Jóváhagyta: Rubin Informatikai Zrt. 1149 Budapest, Egressy út 17-21. telefon: +361 469 4020; fax: +361 469 4029 e-mail: info@rubin.hu;
RUBICON Serial IO kártya Műszaki leírás 1.0 Készítette: Forrai Attila Jóváhagyta: Rubin Informatikai Zrt. 1149 Budapest, Egressy út 17-21. telefon: +361 469 4020; fax: +361 469 4029 e-mail: info@rubin.hu;
Norway Grants. Az akkumulátor mikromenedzsment szabályozás - BMMR - fejlesztés technológiai és műszaki újdonságai. Kakuk Zoltán, Vision 95 Kft.
 Norway Grants AKKUMULÁTOR REGENERÁCIÓS ÉS Az akkumulátor mikromenedzsment szabályozás - BMMR - fejlesztés technológiai és műszaki újdonságai Kakuk Zoltán, Vision 95 Kft. 2017.04.25. Rendszer szintű megoldás
Norway Grants AKKUMULÁTOR REGENERÁCIÓS ÉS Az akkumulátor mikromenedzsment szabályozás - BMMR - fejlesztés technológiai és műszaki újdonságai Kakuk Zoltán, Vision 95 Kft. 2017.04.25. Rendszer szintű megoldás
Programozási segédlet DS89C450 Fejlesztőpanelhez
 Programozási segédlet DS89C450 Fejlesztőpanelhez Készítette: Fekete Dávid Processzor felépítése 2 Perifériák csatlakozása a processzorhoz A perifériák adatlapjai megtalálhatók a programozasi_segedlet.zip-ben.
Programozási segédlet DS89C450 Fejlesztőpanelhez Készítette: Fekete Dávid Processzor felépítése 2 Perifériák csatlakozása a processzorhoz A perifériák adatlapjai megtalálhatók a programozasi_segedlet.zip-ben.
A PET-adatgy informatikai háttereh. Nagy Ferenc Elektronikai osztály, ATOMKI
 A PET-adatgy adatgyűjtés informatikai háttereh Nagy Ferenc Elektronikai osztály, ATOMKI Eleveníts tsük k fel, hogy mi is az a PET! Pozitron Emissziós s Tomográfia Pozitron-boml bomló maggal nyomjelzünk
A PET-adatgy adatgyűjtés informatikai háttereh Nagy Ferenc Elektronikai osztály, ATOMKI Eleveníts tsük k fel, hogy mi is az a PET! Pozitron Emissziós s Tomográfia Pozitron-boml bomló maggal nyomjelzünk
Az irányítástechnika alapfogalmai
 Az irányítástechnika alapfogalmai 2014. 02. 08. Folyamatirányítás - bevezetés Legyen adott egy tetszőleges technológiai rendszer Mi a cél? üzemeltetés az előírt tevékenység elvégzése (termék előállítása,
Az irányítástechnika alapfogalmai 2014. 02. 08. Folyamatirányítás - bevezetés Legyen adott egy tetszőleges technológiai rendszer Mi a cél? üzemeltetés az előírt tevékenység elvégzése (termék előállítása,
FEDÉLZETI INERCIÁLIS ADATGYŰJTŐ RENDSZER ALKALMAZÁSA PILÓTA NÉLKÜLI REPÜLŐGÉPEKBEN BEVEZETÉS
 Koncz Miklós Tamás FEDÉLZETI INERCIÁLIS ADATGYŰJTŐ RENDSZER ALKALMAZÁSA PILÓTA NÉLKÜLI REPÜLŐGÉPEKBEN BEVEZETÉS Magyarországon megszűnt a nagyoroszi (Drégelypalánk) lőtér, a térségben található egyetlen,
Koncz Miklós Tamás FEDÉLZETI INERCIÁLIS ADATGYŰJTŐ RENDSZER ALKALMAZÁSA PILÓTA NÉLKÜLI REPÜLŐGÉPEKBEN BEVEZETÉS Magyarországon megszűnt a nagyoroszi (Drégelypalánk) lőtér, a térségben található egyetlen,
Autóipari beágyazott rendszerek. Komponens és rendszer integráció
 Autóipari beágyazott rendszerek és rendszer integráció 1 Magas szintű fejlesztési folyamat SW architektúra modellezés Modell (VFB) Magas szintű modellezés komponensek portok interfészek adattípusok meghatározása
Autóipari beágyazott rendszerek és rendszer integráció 1 Magas szintű fejlesztési folyamat SW architektúra modellezés Modell (VFB) Magas szintű modellezés komponensek portok interfészek adattípusok meghatározása
Számítógép architektúra
 Budapesti Műszaki Főiskola Regionális Oktatási és Innovációs Központ Székesfehérvár Számítógép architektúra Dr. Seebauer Márta főiskolai tanár seebauer.marta@roik.bmf.hu Irodalmi források Cserny L.: Számítógépek
Budapesti Műszaki Főiskola Regionális Oktatási és Innovációs Központ Székesfehérvár Számítógép architektúra Dr. Seebauer Márta főiskolai tanár seebauer.marta@roik.bmf.hu Irodalmi források Cserny L.: Számítógépek
Új kompakt X20 vezérlő integrált I/O pontokkal
 Új kompakt X20 vezérlő integrált I/O pontokkal Integrált flash 4GB belső 16 kb nem felejtő RAM B&R tovább bővíti a nagy sikerű X20 vezérlő családot, egy kompakt vezérlővel, mely integrált be és kimeneti
Új kompakt X20 vezérlő integrált I/O pontokkal Integrált flash 4GB belső 16 kb nem felejtő RAM B&R tovább bővíti a nagy sikerű X20 vezérlő családot, egy kompakt vezérlővel, mely integrált be és kimeneti
SYS700-A Digitális szabályozó és vezérlõ modul DDC rendszerelemek, DIALOG-III család. Terméktámogatás:
 DDC rendszerelemek, DIALOG-III család KIVITEL ALKALMAZÁS A SYS00-A a Dialog-III készülékcsalád analóg jelek kezelésére alkalmas tagja, amely kifejezetten épületgépészeti szabályozási és vezérlési feladatok
DDC rendszerelemek, DIALOG-III család KIVITEL ALKALMAZÁS A SYS00-A a Dialog-III készülékcsalád analóg jelek kezelésére alkalmas tagja, amely kifejezetten épületgépészeti szabályozási és vezérlési feladatok
USB I/O kártya. 12 relés kimeneti csatornával, 8 digitális bemenettel (TTL) és 8 választható bemenettel, mely analóg illetve TTL módban használható.
 és 8 választható bemenettel, mely analóg illetve TTL módban használható.") USB I/O kártya 12 relés kimeneti csatornával, 8 digitális bemenettel (TTL) és 8 választható bemenettel, mely analóg illetve TTL módban használható. Műszaki adatok: - Tápfeszültség: 12V DC - Áramfelvétel:
USB I/O kártya 12 relés kimeneti csatornával, 8 digitális bemenettel (TTL) és 8 választható bemenettel, mely analóg illetve TTL módban használható. Műszaki adatok: - Tápfeszültség: 12V DC - Áramfelvétel:
Autóipari beágyazott rendszerek Dr. Balogh, András
 Autóipari beágyazott rendszerek Dr. Balogh, András Autóipari beágyazott rendszerek Dr. Balogh, András Publication date 2013 Szerzői jog 2013 Dr. Balogh András Szerzői jog 2013 Dunaújvárosi Főiskola Kivonat
Autóipari beágyazott rendszerek Dr. Balogh, András Autóipari beágyazott rendszerek Dr. Balogh, András Publication date 2013 Szerzői jog 2013 Dr. Balogh András Szerzői jog 2013 Dunaújvárosi Főiskola Kivonat
Napjainkban a korábbiaknál is nagyobb szükségünk van arra, hogy eszközeink rugalmasak legyenek és gyorsan igazodjanak a változó környezethez.
 LabVIEW 2009 még több lehetőség: párhuzamos programozási technikák, vezeték nélküli technológiák és valós idejű rendszereken futó matematikai algoritmusok Napjainkban a korábbiaknál is nagyobb szükségünk
LabVIEW 2009 még több lehetőség: párhuzamos programozási technikák, vezeték nélküli technológiák és valós idejű rendszereken futó matematikai algoritmusok Napjainkban a korábbiaknál is nagyobb szükségünk
Villamos jelek mintavételezése, feldolgozása. LabVIEW 7.1
 Villamos jelek mintavételezése, feldolgozása (ellenállás mérés LabVIEW támogatással) LabVIEW 7.1 előadás Dr. Iványi Miklósné, egyetemi tanár LabVIEW-7.1 KONF-5_2/1 Ellenállás mérés és adatbeolvasás Rn
Villamos jelek mintavételezése, feldolgozása (ellenállás mérés LabVIEW támogatással) LabVIEW 7.1 előadás Dr. Iványi Miklósné, egyetemi tanár LabVIEW-7.1 KONF-5_2/1 Ellenállás mérés és adatbeolvasás Rn
Szenzorhálózatok programfejlesztési kérdései. Orosz György
 Szenzorhálózatok programfejlesztési kérdései Orosz György 2011. 09. 30. Szoftverfejlesztési alternatívák Erőforráskorlátok! (CPU, MEM, Energia) PC-től eltérő felfogás: HW közeli programozás Eszközök közvetlen
Szenzorhálózatok programfejlesztési kérdései Orosz György 2011. 09. 30. Szoftverfejlesztési alternatívák Erőforráskorlátok! (CPU, MEM, Energia) PC-től eltérő felfogás: HW közeli programozás Eszközök közvetlen
Autóipari vezérlőegységek aktív környezetállósági tesztelésének módszerei
 Autóipari vezérlőegységek aktív környezetállósági tesztelésének módszerei Aradi Szilárd PhD témavezető: Dr. Gyenes Károly Közlekedés és járműirányítás workshop BME 2011 ISBN 978-963-420-975-1 Bevezetés
Autóipari vezérlőegységek aktív környezetállósági tesztelésének módszerei Aradi Szilárd PhD témavezető: Dr. Gyenes Károly Közlekedés és járműirányítás workshop BME 2011 ISBN 978-963-420-975-1 Bevezetés
3. A DIGILENT BASYS 2 FEJLESZTŐLAP LEÍRÁSA
 3. A DIGILENT BASYS 2 FEJLESZTŐLAP LEÍRÁSA Az FPGA tervezésben való jártasság megszerzésének célszerű módja, hogy gyári fejlesztőlapot alkalmazzunk. Ezek kiválóan alkalmasak tanulásra, de egyes ipari tervezésekhez
3. A DIGILENT BASYS 2 FEJLESZTŐLAP LEÍRÁSA Az FPGA tervezésben való jártasság megszerzésének célszerű módja, hogy gyári fejlesztőlapot alkalmazzunk. Ezek kiválóan alkalmasak tanulásra, de egyes ipari tervezésekhez
MÉRÉS ÉS TESZTELÉS COBRA CONTROL. NATIONAL INSTRUMENTS Alliance Partner. GÖPEL ELECTRONIC és. DIGITALTEST disztribútor
 MÉRÉS ÉS TESZTELÉS COBRA CONTROL NATIONAL INSTRUMENTS Alliance Partner GÖPEL ELECTRONIC és DIGITALTEST disztribútor 1106 Budapest, Fehér út 10. Tel: +36 1 / 432-0270, Fax: +36 1 / 432-0282 RENDSZERINTEGRÁLÁS
MÉRÉS ÉS TESZTELÉS COBRA CONTROL NATIONAL INSTRUMENTS Alliance Partner GÖPEL ELECTRONIC és DIGITALTEST disztribútor 1106 Budapest, Fehér út 10. Tel: +36 1 / 432-0270, Fax: +36 1 / 432-0282 RENDSZERINTEGRÁLÁS
MÉRŐ AUTOMATA RENDSZEREK
 Állománynév: software defined 10bevezetes32.pdf Irodalom: Előadók jegyzetei: http://users.itk.ppke.hu/ kolumban/software defined/ MÉRŐ AUTOMATA RENDSZEREK Napjaink legfontosabb trendje: Szoftver definiált
Állománynév: software defined 10bevezetes32.pdf Irodalom: Előadók jegyzetei: http://users.itk.ppke.hu/ kolumban/software defined/ MÉRŐ AUTOMATA RENDSZEREK Napjaink legfontosabb trendje: Szoftver definiált
SYS700-PLM Power Line Monitor modul DDC rendszerelemek, DIALOG-III család
 DDC rendszerelemek, DIALOG-III család KIVITEL ALKALMAZÁS A az energiaellátás minőségi jellemzőinek mérésére szolgáló szabadon programozható készülék. Épületfelügyeleti rendszerben (BMS), valamint önállóan
DDC rendszerelemek, DIALOG-III család KIVITEL ALKALMAZÁS A az energiaellátás minőségi jellemzőinek mérésére szolgáló szabadon programozható készülék. Épületfelügyeleti rendszerben (BMS), valamint önállóan
Yottacontrol I/O modulok beállítási segédlet
 Yottacontrol I/O modulok beállítási segédlet : +36 1 236 0427 +36 1 236 0428 Fax: +36 1 236 0430 www.dialcomp.hu dial@dialcomp.hu 1131 Budapest, Kámfor u.31. 1558 Budapest, Pf. 7 Tartalomjegyzék Bevezető...
Yottacontrol I/O modulok beállítási segédlet : +36 1 236 0427 +36 1 236 0428 Fax: +36 1 236 0430 www.dialcomp.hu dial@dialcomp.hu 1131 Budapest, Kámfor u.31. 1558 Budapest, Pf. 7 Tartalomjegyzék Bevezető...
MOTOR HAJTÁS Nagyfeszültségű megszakító
 Forradalom a megszakító technológiában MOTOR HAJTÁS Nagyfeszültségű megszakító ABB HV Products - Page 1 Mi az a Motor Hajtás? ABB HV Products - Page 2 Energia Átvitel Energia Kioldás Energia Tárolás Energia
Forradalom a megszakító technológiában MOTOR HAJTÁS Nagyfeszültségű megszakító ABB HV Products - Page 1 Mi az a Motor Hajtás? ABB HV Products - Page 2 Energia Átvitel Energia Kioldás Energia Tárolás Energia
 Szélessávú Hírközlés és Villamosságtan Tanszék Űrkutató Csoport Szabó József A fedélzeti energiaellátás kérdései: architektúrák, energiaegyensúly. Űrtechnológia Budapest, 2014. március 19. Űrtechnológia
Szélessávú Hírközlés és Villamosságtan Tanszék Űrkutató Csoport Szabó József A fedélzeti energiaellátás kérdései: architektúrák, energiaegyensúly. Űrtechnológia Budapest, 2014. március 19. Űrtechnológia
Analóg elektronika - laboratóriumi gyakorlatok
 Analóg elektronika - laboratóriumi gyakorlatok. Mûveleti erõsítõk egyenáramú jellemzése és alkalmazásai. Elmélet Az erõsítõ fogalmát valamint az integrált mûveleti erõsítõk szerkezetét és viselkedését
Analóg elektronika - laboratóriumi gyakorlatok. Mûveleti erõsítõk egyenáramú jellemzése és alkalmazásai. Elmélet Az erõsítõ fogalmát valamint az integrált mûveleti erõsítõk szerkezetét és viselkedését
Érzékelők és beavatkozók
 Érzékelők és beavatkozók DC motorok 3. rész egyetemi docens - 1 - DC motorvezérlés H-híd: +V r Motor mozgatás előre Motor mozgatás hátra Fékezés Szabadonfutás a vezérlés függvényében UL LL + Ø - UR LR
Érzékelők és beavatkozók DC motorok 3. rész egyetemi docens - 1 - DC motorvezérlés H-híd: +V r Motor mozgatás előre Motor mozgatás hátra Fékezés Szabadonfutás a vezérlés függvényében UL LL + Ø - UR LR
Nagy teljesítményű vészhelyzeti áramforrás tervezése
 Nagy teljesítményű vészhelyzeti áramforrás tervezése Fuszenecker Róbert 2009. február 25. Készítette: Fuszenecker Róbert 2009-ben. 1 / 29 A feladat megfogalmazása Az EADS 1 specifikációjának megfelelően
Nagy teljesítményű vészhelyzeti áramforrás tervezése Fuszenecker Róbert 2009. február 25. Készítette: Fuszenecker Róbert 2009-ben. 1 / 29 A feladat megfogalmazása Az EADS 1 specifikációjának megfelelően
I. C8051Fxxx mikrovezérlők hardverfelépítése, működése. II. C8051Fxxx mikrovezérlők programozása. III. Digitális perifériák
 I. C8051Fxxx mikrovezérlők hardverfelépítése, működése 1. Adja meg a belső RAM felépítését! 2. Miben különbözik a belső RAM alsó és felső felének elérhetősége? 3. Hogyan érhetők el az SFR regiszterek?
I. C8051Fxxx mikrovezérlők hardverfelépítése, működése 1. Adja meg a belső RAM felépítését! 2. Miben különbözik a belső RAM alsó és felső felének elérhetősége? 3. Hogyan érhetők el az SFR regiszterek?
KIBŐVÍTETT RUGALMAS AUTOMATIZÁLÁS
 KIBŐVÍTETT RUGALMAS AUTOMATIZÁLÁS ZEN-C4 nagyobb rugalmasság RS-485 kommunikációval Kínálatunk kommunikációs típussal bővült. Így már lehetősége van több ZEN egység hálózati környezetbe csatlakoztatására.
KIBŐVÍTETT RUGALMAS AUTOMATIZÁLÁS ZEN-C4 nagyobb rugalmasság RS-485 kommunikációval Kínálatunk kommunikációs típussal bővült. Így már lehetősége van több ZEN egység hálózati környezetbe csatlakoztatására.
Fizikai mérések Arduino-val
 Fizikai mérések Arduino-val Csajkos Bence, Veres József Csatári László Sándor mentor Megvalósult az Emberi Erőforrások Minisztériuma megbízásából az Emberi Erőforrás Támogatáskezelő a 2015/2016. tanévre
Fizikai mérések Arduino-val Csajkos Bence, Veres József Csatári László Sándor mentor Megvalósult az Emberi Erőforrások Minisztériuma megbízásából az Emberi Erőforrás Támogatáskezelő a 2015/2016. tanévre
Jelgenerálás virtuális eszközökkel. LabVIEW 7.1
 Jelgenerálás virtuális eszközökkel (mágneses hiszterézis mérése) LabVIEW 7.1 3. előadás Dr. Iványi Miklósné, egyetemi tanár LabVIEW-7.1 EA-3/1 Folytonos idejű jelek diszkrét idejű mérése A mintavételezési
Jelgenerálás virtuális eszközökkel (mágneses hiszterézis mérése) LabVIEW 7.1 3. előadás Dr. Iványi Miklósné, egyetemi tanár LabVIEW-7.1 EA-3/1 Folytonos idejű jelek diszkrét idejű mérése A mintavételezési
Digitális technika (VIMIAA01) Laboratórium 9
 Laboratórium 9") BUDAPESTI MŰSZAKI ÉS GAZDASÁGTUDOMÁNYI EGYETEM VILLAMOSMÉRNÖKI ÉS INFORMATIKAI KAR MÉRÉSTECHNIKA ÉS INFORMÁCIÓS RENDSZEREK TANSZÉK Digitális technika (VIMIAA01) Laboratórium 9 Fehér Béla Raikovich Tamás,
BUDAPESTI MŰSZAKI ÉS GAZDASÁGTUDOMÁNYI EGYETEM VILLAMOSMÉRNÖKI ÉS INFORMATIKAI KAR MÉRÉSTECHNIKA ÉS INFORMÁCIÓS RENDSZEREK TANSZÉK Digitális technika (VIMIAA01) Laboratórium 9 Fehér Béla Raikovich Tamás,
Programmable Chip. System on a Chip. Lazányi János. Tartalom. A hagyományos technológia SoC / PSoC SoPC Fejlesztés menete Mi van az FPGA-ban?
 System on a Chip Programmable Chip Lazányi János 2010 Tartalom A hagyományos technológia SoC / PSoC SoPC Fejlesztés menete Mi van az FPGA-ban? Page 2 1 A hagyományos technológia Elmosódó határvonalak ASIC
System on a Chip Programmable Chip Lazányi János 2010 Tartalom A hagyományos technológia SoC / PSoC SoPC Fejlesztés menete Mi van az FPGA-ban? Page 2 1 A hagyományos technológia Elmosódó határvonalak ASIC
Autóipari beágyazott rendszerek. Integrált és szétcsatolt rendszerek
 Autóipari beágyazott rendszerek Integrált és szétcsatolt rendszerek 1 Integrált és szétcsatolt rendszerek Szétcsatolt rendszer 1:1 hozzárendelés ECUk és funkciók között Minden funkció külön egységen van
Autóipari beágyazott rendszerek Integrált és szétcsatolt rendszerek 1 Integrált és szétcsatolt rendszerek Szétcsatolt rendszer 1:1 hozzárendelés ECUk és funkciók között Minden funkció külön egységen van
RÁDIÓS ADATGYŰJTŐ BERENDEZÉS RD01. Használati útmutató
 RÁDIÓS ADATGYŰJTŐ BERENDEZÉS RD01 Használati útmutató Ez a dokumentum a Ring Games Kft. által gyártott GSM Adatgyűjtő Rendszer RD01 típusú eszközének Használati útmutatója. 2004, Ring Games Kft. Ring Games
RÁDIÓS ADATGYŰJTŐ BERENDEZÉS RD01 Használati útmutató Ez a dokumentum a Ring Games Kft. által gyártott GSM Adatgyűjtő Rendszer RD01 típusú eszközének Használati útmutatója. 2004, Ring Games Kft. Ring Games
Villamos jelek mintavételezése, feldolgozása. LabVIEW előadás
 Villamos jelek mintavételezése, feldolgozása (ellenállás mérés LabVIEW támogatással) LabVIEW 7.1 2. előadás Dr. Iványi Miklósné, egyetemi tanár LabVIEW-7.1 EA-2/1 Ellenállás mérés és adatbeolvasás Rn ismert
Villamos jelek mintavételezése, feldolgozása (ellenállás mérés LabVIEW támogatással) LabVIEW 7.1 2. előadás Dr. Iványi Miklósné, egyetemi tanár LabVIEW-7.1 EA-2/1 Ellenállás mérés és adatbeolvasás Rn ismert
RSC-2R. Wireless Modem RS232, RS232 vonalhosszabbító, RS 232 / Rádió konverter
 RSC-2R Wireless Modem RS232, RS232 vonalhosszabbító, RS 232 / Rádió konverter Felhasználás Az RS232 rádiómodem egy DB9-es csatlakozóval RS232 portra kapcsolható, pl. PC-hez vagy egyéb soros kimenetű mobil
RSC-2R Wireless Modem RS232, RS232 vonalhosszabbító, RS 232 / Rádió konverter Felhasználás Az RS232 rádiómodem egy DB9-es csatlakozóval RS232 portra kapcsolható, pl. PC-hez vagy egyéb soros kimenetű mobil
Pázmány Péter Katolikus Egyetem Információs Technológiai Kar. Témavezető: Tihanyi Attila Külső konzulens: Vesztergom Soma
 Számítógép-vezérelt potenciosztát építése speciális és rutinszerű elektrokémiai mérésekhez Taróczy-Tóth Zsigmond Pázmány Péter Katolikus Egyetem Információs Technológiai Kar Témavezető: Tihanyi Attila
Számítógép-vezérelt potenciosztát építése speciális és rutinszerű elektrokémiai mérésekhez Taróczy-Tóth Zsigmond Pázmány Péter Katolikus Egyetem Információs Technológiai Kar Témavezető: Tihanyi Attila
Beltéri autonóm négyrotoros helikopter szabályozó rendszerének kifejlesztése és hardware-in-the-loop tesztelése
 Beltéri autonóm négyrotoros helikopter szabályozó rendszerének kifejlesztése és hardware-in-the-loop tesztelése Regula Gergely, Lantos Béla BME Villamosmérnöki és Informatikai Kar Irányítástechnika és
Beltéri autonóm négyrotoros helikopter szabályozó rendszerének kifejlesztése és hardware-in-the-loop tesztelése Regula Gergely, Lantos Béla BME Villamosmérnöki és Informatikai Kar Irányítástechnika és
Robotot vezérlő szoftverek fejlesztése Developing robot controller softwares
 Robotot vezérlő szoftverek fejlesztése Developing robot controller softwares VARGA Máté 1, PÓGÁR István 2, VÉGH János 1 Programtervező informatikus BSc szakos hallgató 2 Programtervező informatikus MSc
Robotot vezérlő szoftverek fejlesztése Developing robot controller softwares VARGA Máté 1, PÓGÁR István 2, VÉGH János 1 Programtervező informatikus BSc szakos hallgató 2 Programtervező informatikus MSc
5. KOMBINÁCIÓS HÁLÓZATOK LEÍRÁSÁNAK SZABÁLYAI
 5. KOMBINÁCIÓS HÁLÓZATOK LEÍRÁSÁNAK SZABÁLYAI 1 Kombinációs hálózatok leírását végezhetjük mind adatfolyam-, mind viselkedési szinten. Az adatfolyam szintű leírásokhoz az assign kulcsszót használjuk, a
5. KOMBINÁCIÓS HÁLÓZATOK LEÍRÁSÁNAK SZABÁLYAI 1 Kombinációs hálózatok leírását végezhetjük mind adatfolyam-, mind viselkedési szinten. Az adatfolyam szintű leírásokhoz az assign kulcsszót használjuk, a
Irányítástechnika 1. 8. Elıadás. PLC rendszerek konfigurálása
 Irányítástechnika 1 8. Elıadás PLC rendszerek konfigurálása Irodalom - Helmich József: Irányítástechnika I, 2005 - Zalotay Péter: PLC tanfolyam - Klöckner-Möller Hungária: Hardverleírás és tervezési segédlet,
Irányítástechnika 1 8. Elıadás PLC rendszerek konfigurálása Irodalom - Helmich József: Irányítástechnika I, 2005 - Zalotay Péter: PLC tanfolyam - Klöckner-Möller Hungária: Hardverleírás és tervezési segédlet,
2. Elméleti összefoglaló
 2. Elméleti összefoglaló 2.1 A D/A konverterek [1] A D/A konverter feladata, hogy a bemenetére érkező egész számmal arányos analóg feszültséget vagy áramot állítson elő a kimenetén. A működéséhez szükséges
2. Elméleti összefoglaló 2.1 A D/A konverterek [1] A D/A konverter feladata, hogy a bemenetére érkező egész számmal arányos analóg feszültséget vagy áramot állítson elő a kimenetén. A működéséhez szükséges
Oktató laboratóriumban használható virtuális neutron detektor prototípusának elkészítése. OAH-ABA-18/16 Készítette: Huszti József, Szirmai Károly
 Oktató laboratóriumban használható virtuális neutron detektor prototípusának elkészítése OAH-ABA-18/16 Készítette: Huszti József, Szirmai Károly Előzmények Eszközök Fejlesztési feladatok Vázlat A mock
Oktató laboratóriumban használható virtuális neutron detektor prototípusának elkészítése OAH-ABA-18/16 Készítette: Huszti József, Szirmai Károly Előzmények Eszközök Fejlesztési feladatok Vázlat A mock
Premium Application Note Hőközponti irányítástechnika
 Premium Application Note Hőközponti irányítástechnika Iparág Energetika Alkalmazás A Kaposvári Önkormányzat fűtőműve által üzemeltetett Honvéd utcai hőközpont rekonstrukciós munkálatai során az alkalmazott
Premium Application Note Hőközponti irányítástechnika Iparág Energetika Alkalmazás A Kaposvári Önkormányzat fűtőműve által üzemeltetett Honvéd utcai hőközpont rekonstrukciós munkálatai során az alkalmazott
T Bird 2. AVR fejlesztőpanel. Használati utasítás. Gyártja: BioDigit Kft. Forgalmazza: HEStore.hu webáruház. BioDigit Kft, 2012. Minden jog fenntartva
 T Bird 2 AVR fejlesztőpanel Használati utasítás Gyártja: BioDigit Kft Forgalmazza: HEStore.hu webáruház BioDigit Kft, 2012 Minden jog fenntartva Főbb tulajdonságok ATMEL AVR Atmega128 típusú mikrovezérlő
T Bird 2 AVR fejlesztőpanel Használati utasítás Gyártja: BioDigit Kft Forgalmazza: HEStore.hu webáruház BioDigit Kft, 2012 Minden jog fenntartva Főbb tulajdonságok ATMEL AVR Atmega128 típusú mikrovezérlő
Foglalkozási napló a 20 /20. tanévre
 Foglalkozási napló a 20 /20. tanévre Elektronikai műszerész szakma gyakorlati oktatásához OKJ száma: 34 522 03 A napló vezetéséért felelős: A napló megnyitásának dátuma: A napló lezárásának dátuma: Tanulók
Foglalkozási napló a 20 /20. tanévre Elektronikai műszerész szakma gyakorlati oktatásához OKJ száma: 34 522 03 A napló vezetéséért felelős: A napló megnyitásának dátuma: A napló lezárásának dátuma: Tanulók
Irányítástechnika 12. évfolyam
 Irányítástechnika 12. évfolyam Irányítástechnikai alapismeretek Az irányítás fogalma. Irányítási példák. Az irányítás részműveletei: Érzékelés (információszerzés). Ítéletalkotás (az megszerzett információ
Irányítástechnika 12. évfolyam Irányítástechnikai alapismeretek Az irányítás fogalma. Irányítási példák. Az irányítás részműveletei: Érzékelés (információszerzés). Ítéletalkotás (az megszerzett információ
Multi-20 modul. Felhasználói dokumentáció 1.1. Készítette: Parrag László. Jóváhagyta: Rubin Informatikai Zrt.
 Multi-20 modul Felhasználói dokumentáció. Készítette: Parrag László Jóváhagyta: Rubin Informatikai Zrt. 49 Budapest, Egressy út 7-2. telefon: +36 469 4020; fax: +36 469 4029 e-mail: info@rubin.hu; web:
Multi-20 modul Felhasználói dokumentáció. Készítette: Parrag László Jóváhagyta: Rubin Informatikai Zrt. 49 Budapest, Egressy út 7-2. telefon: +36 469 4020; fax: +36 469 4029 e-mail: info@rubin.hu; web:
SYS700-DIDO-HFR Digitális szabadon programozható szabályozó (Digitális be- és kimenettel) Szabályozók és vezérlõk
 Szabályozók és vezérlõk") KIVITEL ALKALMAZÁS, ILLESZTHETÕSÉG A SYS700-DIDO-HFR a Dialog-III készülékcsalád digitális jelek kezelésére alkalmas tagja, amely kifejezetten hő- és füstelvezetési vezérlési feladatok ellátására lett
KIVITEL ALKALMAZÁS, ILLESZTHETÕSÉG A SYS700-DIDO-HFR a Dialog-III készülékcsalád digitális jelek kezelésére alkalmas tagja, amely kifejezetten hő- és füstelvezetési vezérlési feladatok ellátására lett
Elektronika laboratóriumi mérőpanel elab panel NEM VÉGLEGES VÁLTOZAT! Óbudai Egyetem
 Elektronika laboratóriumi mérőpanel elab panel NEM VÉGLEGES VÁLTOZAT! 1 Óbudai Egyetem 2 TARTALOMJEGYZÉK I. Bevezetés 3 I-A. Beüzemelés.................................. 4 I-B. Változtatható ellenállások...........................
Elektronika laboratóriumi mérőpanel elab panel NEM VÉGLEGES VÁLTOZAT! 1 Óbudai Egyetem 2 TARTALOMJEGYZÉK I. Bevezetés 3 I-A. Beüzemelés.................................. 4 I-B. Változtatható ellenállások...........................
Mérési útmutató a Mobil Kommunikáció és Kvantumtechnológiák Laboratórium méréseihez
 Mérési útmutató a Mobil Kommunikáció és Kvantumtechnológiák Laboratórium méréseihez Szoftver rádiózás alapjai Mérés helye: Hálózati Rendszerek és Szolgáltatások Tanszék Mobil Kommunikáció és Kvantumtechnológiák
Mérési útmutató a Mobil Kommunikáció és Kvantumtechnológiák Laboratórium méréseihez Szoftver rádiózás alapjai Mérés helye: Hálózati Rendszerek és Szolgáltatások Tanszék Mobil Kommunikáció és Kvantumtechnológiák
ALPHA és ALPHA XL műszaki leírás
 ALPHA és ALPHA XL műszaki leírás ALPHA műszaki leírás: Általános jellemzők Alpha sorozat Környezeti hőmérséklet 0 55ºC Működési hőmérséklet 0 55ºC Tárolási hőmérséklet -30 70ºC Védelmi típus IP20 Zavarvédettség
ALPHA és ALPHA XL műszaki leírás ALPHA műszaki leírás: Általános jellemzők Alpha sorozat Környezeti hőmérséklet 0 55ºC Működési hőmérséklet 0 55ºC Tárolási hőmérséklet -30 70ºC Védelmi típus IP20 Zavarvédettség
Rubin SPIRIT TEST. Rubin firmware-ek és hardverek tesztelése esettanulmány V1.0. Készítette: Hajnali Krisztián Jóváhagyta: Varga József
 Rubin firmware-ek és hardverek tesztelése esettanulmány V1.0 Készítette: Hajnali Krisztián Jóváhagyta: Varga József Rubin Informatikai Zrt. 1149 Budapest, Egressy út 17-21. telefon: +361 469 4020; fax:
Rubin firmware-ek és hardverek tesztelése esettanulmány V1.0 Készítette: Hajnali Krisztián Jóváhagyta: Varga József Rubin Informatikai Zrt. 1149 Budapest, Egressy út 17-21. telefon: +361 469 4020; fax:
OPERÁCIÓS RENDSZEREK. Elmélet
 1. OPERÁCIÓS RENDSZEREK Elmélet BEVEZETÉS 2 Az operációs rendszer fogalma Az operációs rendszerek feladatai Csoportosítás BEVEZETÉS 1. A tantárgy tananyag tartalma 2. Operációs rendszerek régen és most
1. OPERÁCIÓS RENDSZEREK Elmélet BEVEZETÉS 2 Az operációs rendszer fogalma Az operációs rendszerek feladatai Csoportosítás BEVEZETÉS 1. A tantárgy tananyag tartalma 2. Operációs rendszerek régen és most
VILLAMOSMÉRNÖKÖK RÉSZÉRE MEGHIRDETETT SZAKDOLGOZAT TÉMÁK 2012/13.II. és 2013/2014 I. félévekre
 VILLAMOSMÉRNÖKÖK RÉSZÉRE MEGHIRDETETT SZAKDOLGOZAT TÉMÁK 2012/13.II. és 2013/2014 I. félévekre Tartalomjegyzék IPARI PARTNEREINK ÁLTAL MEGHIRDETETT TÉMÁK... 3 1. Basic Scan Tool (SW) kifejlesztése... 3
VILLAMOSMÉRNÖKÖK RÉSZÉRE MEGHIRDETETT SZAKDOLGOZAT TÉMÁK 2012/13.II. és 2013/2014 I. félévekre Tartalomjegyzék IPARI PARTNEREINK ÁLTAL MEGHIRDETETT TÉMÁK... 3 1. Basic Scan Tool (SW) kifejlesztése... 3
OpenCL alapú eszközök verifikációja és validációja a gyakorlatban
 OpenCL alapú eszközök verifikációja és validációja a gyakorlatban Fekete Tamás 2015. December 3. Szoftver verifikáció és validáció tantárgy Áttekintés Miért és mennyire fontos a megfelelő validáció és
OpenCL alapú eszközök verifikációja és validációja a gyakorlatban Fekete Tamás 2015. December 3. Szoftver verifikáció és validáció tantárgy Áttekintés Miért és mennyire fontos a megfelelő validáció és
T Bird 2. AVR fejlesztőpanel. Használati utasítás. Gyártja: BioDigit Kft. Forgalmazza: HEStore.hu webáruház. BioDigit Kft, 2012. Minden jog fenntartva
 T Bird 2 AVR fejlesztőpanel Használati utasítás Gyártja: BioDigit Kft Forgalmazza: HEStore.hu webáruház BioDigit Kft, 2012 Minden jog fenntartva Főbb tulajdonságok ATMEL AVR Atmega128 típusú mikrovezérlő
T Bird 2 AVR fejlesztőpanel Használati utasítás Gyártja: BioDigit Kft Forgalmazza: HEStore.hu webáruház BioDigit Kft, 2012 Minden jog fenntartva Főbb tulajdonságok ATMEL AVR Atmega128 típusú mikrovezérlő
Szoftver rádió (SDR) rádióamatőröknek. Dr. Selmeczi János HA5FT
 rádióamatőröknek. Dr. Selmeczi János HA5FT") Szoftver rádió (SDR) rádióamatőröknek Dr. Selmeczi János HA5FT ha5ft@freemail.hu Mi is az a szoftver rádió Olyan rádió amelyben A hardvert szoftverrel vezéreljük A fizikai réteg funkcióit szoftverrel valósítjuk
Szoftver rádió (SDR) rádióamatőröknek Dr. Selmeczi János HA5FT ha5ft@freemail.hu Mi is az a szoftver rádió Olyan rádió amelyben A hardvert szoftverrel vezéreljük A fizikai réteg funkcióit szoftverrel valósítjuk
Intelligens kamera alkalmazás fejlesztése
 Intelligens kamera alkalmazás fejlesztése Készítette: Mészáros Balázs Konzulens: Molnár Károly Budapesti Műszaki és Gazdaságtudományi Egyetem Méréstechnika és információs rendszerek tanszék 2011/2012 ősz
Intelligens kamera alkalmazás fejlesztése Készítette: Mészáros Balázs Konzulens: Molnár Károly Budapesti Műszaki és Gazdaságtudományi Egyetem Méréstechnika és információs rendszerek tanszék 2011/2012 ősz
Házi feladatok Szenzorhálózatok és alkalmazásaik
 Házi feladatok Szenzorhálózatok és alkalmazásaik VITMMA09 Okos város MSc mellékspecializáció Általános tudnivalók 6 téma 6 db. 4 fős csoport A házi feladat elvégzése kötelező, a vizsgára jelentkezés feltétele
Házi feladatok Szenzorhálózatok és alkalmazásaik VITMMA09 Okos város MSc mellékspecializáció Általános tudnivalók 6 téma 6 db. 4 fős csoport A házi feladat elvégzése kötelező, a vizsgára jelentkezés feltétele