Bevezetés a mikrovezérlők programozásába: Léptetőmotorok vezérlése
|
|
|
- Alajos Fábián
- 9 évvel ezelőtt
- Látták:
Átírás
1 Bevezetés a mikrovezérlők programozásába: Léptetőmotorok vezérlése 1

2 Mi a léptetőmotor? Felhasznált forrás: learn.adafruit.com/all-about-stepper-motors/what-is-a-stepper-motor A léptetőmotorok olyan egyenáramú motorok, amelyek az elfordulást diszkrét lépésekben végzik. Tekercsei úgynevezett fázisokba vannak szervezve. Egymás után áram alá helyezve sorban minden fázist egy lépést végeztethetünk el a motorral. Számítógép vagy mikrovezérlő vezérléssel irányítva a léptetéseket, pontos pozicionálás vagy sebességvezérlés érhető el: 3D printer, CNC gépek, X-Y plotter, floppy fejmozgató, mátrix vagy tintasugaras nyomtató. 2

3 Hogy működik a léptetőmotor? A léptetőmotor lényegében olyan szinkronmotor, ahol a forgórészt az állórész mágneses terének elforgatásával mozgatjuk. A mágnese tér forgatását a fázisok sorrendben, egymás utáni aktiválásával érjük el. Az alábbi képeken egy négyfázisú unipoláris motor látható. 3

4 Mire jó a léptetőmotor? Pozicionálás Mivel a léptetőmotor pontos, jól reprodukálható lépésekben forog, kitűnően használható pozícionálásra nyomtatókban, szerszámgépekben, rajzgépekben, mozgófejes tömegtárolókban, robotokban. Sebességvezérlés A precíz lépésekben történő elfordulás kitűnő lehetőséget nyújt a forgási sebesség pontos vezérlésére a gyártásfolyamatok automatizálásban és a robotikában. Nyomaték kis sebességeknél A hagyományos egyenáramú motorok kis fordulatszámnál nagyon kis nyomatékot képesek kifejteni. A léptetőmotorok viszont kis fordulatszámnál maximális nyomatékkal rendelkeznek, ezért ideálisak lehetnek a kis fordulatszámú alkalmazásoknál, különösen, ha precíz pozicionálásra, vagy sebességvezérlésre is szükség van. 4

5 A léptetőmotorok korlátai Kis hatásfok A hagyományos DC motoroktól eltérően a fogyasztás független a terheléstől. A legnagyobb áram akkor folyik, amikor a motor nem forog. Emiatt jellemző az erőteljes melegedés. Korlátozott nyomaték nagy sebességnél Általában nagyobb fordulatszámon kisebb a nyomaték, mint alacsony fordulatszámon. Léteznek magasabb fordulatszámra optimalizált léptetőmotorok, de ezekhez speciális vezérlőre van szükség. Nincs visszacsatolás A szervómotoroktól eltérően a léptetőmotoroknál nincs beépített visszajelzés a pozícióról. Habár egyszerű esetekben nyílthurkú alkalmazásokkal is jó eredményeket érhetünk el, a komolyabb alkalmazásoknál végálláskapcsolókra, vagy alaphelyzet érzékelőre van szükség a biztonságos működés vagy a megbízható referenciahelyzet biztosításához. 5

6 Léptetőmotorok vezérlése Bipoláris motorok vezérlésénél biztosítani kell a tekercseken a polaritásváltás lehetőségét: tekercsenként 1-1 H-híd szükséges Például: L293D Az unipoláris motoroknál a tekercsek vezérlése mindig azonos polaritással történik, így a tekercsek egyik vége összeköthető (8 helyett 6 vagy 5 kivezetés). A tekercsek vezérlése egy-egy tranzisztorral vagy FET-tel is megoldható. 6
.")
7 Bipoláris vezérlés 6 kimenettel 4 vezeték a két H-híd vezérléséhez, 2 vezeték pedig a PWM teljesítményvezérlésre kell (az Enable lábak felhasználásával). Bővebb információ található a december 17-i talk18 motorvezérlésről szóló előadásban. A kapcsolás lényegében megegyezik a talk18 előadásban bemutatott, két DC motor vezérlésére használt H-hidas áramkörrel, csak a DC motorok helyére most a bipoláris léptetőmotor egy-egy tekercsét kötjük. 7

8 stepper_onerevolution.ino #include <Stepper.h> const int stepsperrevolution = 20; // steps per revolution #define PWMA 3 // L293D pin1 Enable1 PWM control #define PWMB 6 // L293D pin9 Enable2 PWM control Stepper mystepper(stepsperrevolution, 2,4,5,7); void setup() { pinmode(pwma, OUTPUT); pinmode(pwmb, OUTPUT); setthrottle(0); mystepper.setspeed(120); Serial.begin(9600); } void loop() { Serial.println("clockwise"); // set the speed at 120 rpm // initialize the serial port: // step one revolution in one direction: setthrottle(255); mystepper.step(stepsperrevolution); setthrottle(64); delay(1000); Serial.println("counterclockwise"); // step one revolution in the other direction: setthrottle(255); mystepper.step(-stepsperrevolution); setthrottle(64); delay(1000); } void setthrottle(uint8_t duty) { digitalwrite(pwma,duty); digitalwrite(pwmb,duty); } D2, D4, D5, D7 rendre az L293D IC In1, In2, In3, In4 bemeneteit vezérlik A program az Arduino IDE mintapéldái között található, csak: 1. Aktualizáltuk a konkrét motortípushoz. 2. Kiegészítettük a teljesítményvezérléssel. 8
; // set the speed at 120 rpm // initialize the serial port: // step one revolution in one direction: setthrottle(255); mystepper.")
9 Bipoláris vezérlés 3 kivezetéssel Kihasználva, hogy a H-híddal történő vezérlésénél 2-2 láb állapota mindig ellentétes, egy-egy inverterrel csökkenthetjük a felhasznált Arduino kivezetések számát. A PWM vezérlés pedig közösíthető. Így csak a D2, D3 (PWM) és a D4 kivezetésekre van szükség. 9

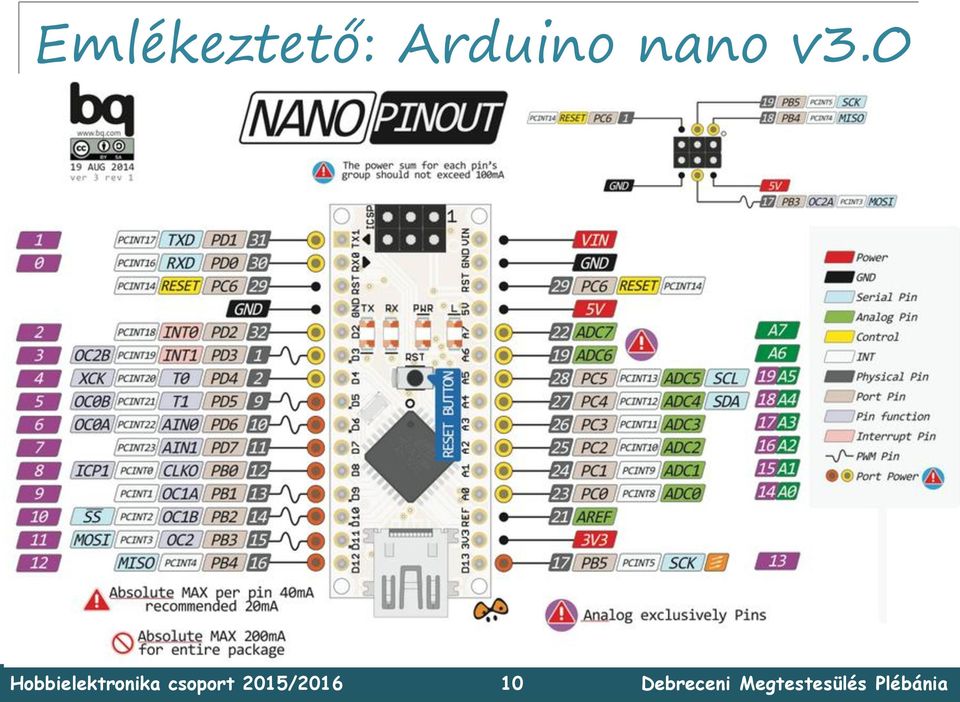
10 Emlékeztető: Arduino nano v3.0 10
Léptetőmotorok. Előnyök: Hátrányok:
 Léptetőmotorok A léptetőmotorok lényeges tulajdonsága, hogy egy körülforduláshoz hány lépés szükséges. Ezt megadhatják fokban, ekkor az egy lépésre eső szögelfordulást adják meg. Illetve megadhatják az
Léptetőmotorok A léptetőmotorok lényeges tulajdonsága, hogy egy körülforduláshoz hány lépés szükséges. Ezt megadhatják fokban, ekkor az egy lépésre eső szögelfordulást adják meg. Illetve megadhatják az
Bevezetés a mikrovezérlők programozásába: DC motorok vezérlése
 Bevezetés a mikrovezérlők programozásába: DC motorok vezérlése 1 Lab 18 projektek L293D_test_1M.ino tesztprogram egy motor vezérléséhez L293D_test_2M.ino tesztprogram két motor vezérléséhez L293D_test2_2M.ino
Bevezetés a mikrovezérlők programozásába: DC motorok vezérlése 1 Lab 18 projektek L293D_test_1M.ino tesztprogram egy motor vezérléséhez L293D_test_2M.ino tesztprogram két motor vezérléséhez L293D_test2_2M.ino
Bevezetés a mikrovezérlők programozásába: WS2812 RGB LED-ek vezérlése
 Bevezetés a mikrovezérlők programozásába: WS2812 RGB LED-ek vezérlése 1 Megjegyzések: Lab 2 projektek Neopixel_simple egy WS2812 LED beállítása előre egy megadott színre. Neopixel_random véletlen színát
Bevezetés a mikrovezérlők programozásába: WS2812 RGB LED-ek vezérlése 1 Megjegyzések: Lab 2 projektek Neopixel_simple egy WS2812 LED beállítása előre egy megadott színre. Neopixel_random véletlen színát
Irányításelmélet és technika I.
 Irányításelmélet és technika I. Elektromechanikai rendszerek dinamikus leírása Magyar Attila Pannon Egyetem Műszaki Informatikai Kar Villamosmérnöki és Információs Rendszerek Tanszék amagyar@almos.vein.hu
Irányításelmélet és technika I. Elektromechanikai rendszerek dinamikus leírása Magyar Attila Pannon Egyetem Műszaki Informatikai Kar Villamosmérnöki és Információs Rendszerek Tanszék amagyar@almos.vein.hu
LPT illesztőkártya. Beüzemelési útmutató
 LPT illesztőkártya Beüzemelési útmutató Az LPT illesztőkártya a számítógépen futó mozgásvezérlő program ki- és bemenőjeleit illeszti a CNC gép és a PC nyomtató (LPT) csatlakozója között. Főbb jellemzők:
LPT illesztőkártya Beüzemelési útmutató Az LPT illesztőkártya a számítógépen futó mozgásvezérlő program ki- és bemenőjeleit illeszti a CNC gép és a PC nyomtató (LPT) csatlakozója között. Főbb jellemzők:
Profi2A Axis Driver (telepítés)
") Profi2A Axis Driver (telepítés) V1.0 Mechanikai kialakítás és elhelyezés: PCB: - Kétoldalas, lyukgalvanizált nyáklemez, részben SMD szereléssel, - Méretei: 170mm 90mm, magasság igény min. 50mm (légmozgatással),
Profi2A Axis Driver (telepítés) V1.0 Mechanikai kialakítás és elhelyezés: PCB: - Kétoldalas, lyukgalvanizált nyáklemez, részben SMD szereléssel, - Méretei: 170mm 90mm, magasság igény min. 50mm (légmozgatással),
A nagy teljesítõképességû vektorhajtások pontos paraméterszámításokat igényelnek
 A nagy teljesítõképességû vektorhajtások pontos paraméterszámításokat igényelnek Mike Cade - Control Techniques plc A motorszabályozás algoritmusaihoz számos motorparamétere van szükség, de pontatlan értékek
A nagy teljesítõképességû vektorhajtások pontos paraméterszámításokat igényelnek Mike Cade - Control Techniques plc A motorszabályozás algoritmusaihoz számos motorparamétere van szükség, de pontatlan értékek
Többfunkciós hobbirobot építése és vezérlése Arduino UNO mikrovezérlő kártya segítségével
 Miskolci Egyetem Gépészmérnöki és Informatikai Kar Villamosmérnöki Intézet Elektrotechnikai-Elektronikai Intézeti Tanszék Villamosmérnöki szak Elektronikai tervezés és gyártás szakirány Többfunkciós hobbirobot
Miskolci Egyetem Gépészmérnöki és Informatikai Kar Villamosmérnöki Intézet Elektrotechnikai-Elektronikai Intézeti Tanszék Villamosmérnöki szak Elektronikai tervezés és gyártás szakirány Többfunkciós hobbirobot
Vegyes témakörök. A KAT120B kijelző vezérlése Arduinoval
 Vegyes témakörök A KAT120B kijelző vezérlése Arduinoval 1 KAT120B hívószám kijelző A KAT120B kijelző a NEMO-Q International AB egy régi terméke. A cég ma is fogalmaz különféle hívószám kijelzőket bankok,
Vegyes témakörök A KAT120B kijelző vezérlése Arduinoval 1 KAT120B hívószám kijelző A KAT120B kijelző a NEMO-Q International AB egy régi terméke. A cég ma is fogalmaz különféle hívószám kijelzőket bankok,
Mérési útmutató. A/D konverteres mérés. // Első lépésként tanulmányozzuk a digitális jelfeldolgozás előnyeit és határait.
 Mérési útmutató A/D konverteres mérés 1. Az A/D átalakítók főbb típusai és rövid leírásuk // Első lépésként tanulmányozzuk a digitális jelfeldolgozás előnyeit és határait. Csoportosítás polaritás szempontjából:
Mérési útmutató A/D konverteres mérés 1. Az A/D átalakítók főbb típusai és rövid leírásuk // Első lépésként tanulmányozzuk a digitális jelfeldolgozás előnyeit és határait. Csoportosítás polaritás szempontjából:
MSP430 programozás Energia környezetben. Szervó motorok vezérlése
 MSP430 programozás Energia környezetben Szervó motorok vezérlése 1 Szervo motorok Felépítés Jelalak 2 Servo programkönyvtár A gyári Servo programkönyvtár max. 8 db szervót kezel, s ezekhez felhasználja
MSP430 programozás Energia környezetben Szervó motorok vezérlése 1 Szervo motorok Felépítés Jelalak 2 Servo programkönyvtár A gyári Servo programkönyvtár max. 8 db szervót kezel, s ezekhez felhasználja
Egyszabadságfokú mechanikai rendszer irányítása nyílt hurkú vezérlés
 Egyszabadságfokú mechanikai rendszer irányítása nyílt hurkú vezérlés A gyakorlat célja Egyenáramú szervo motorral vezérelt egyszabadságfokú mechanikai rendszer meghajtó áramkörének és az ADVANTECH PCI
Egyszabadságfokú mechanikai rendszer irányítása nyílt hurkú vezérlés A gyakorlat célja Egyenáramú szervo motorral vezérelt egyszabadságfokú mechanikai rendszer meghajtó áramkörének és az ADVANTECH PCI
Technológia funkciók Számláló, PWM
 10. Laborgyakorlat Technológia funkciók Számláló, PWM A gyakorlat célja A technológiai funkciók olyan software vagy hardware eszközök, amelyek segítségével egy adott folyamatirányítási feladat könnyen
10. Laborgyakorlat Technológia funkciók Számláló, PWM A gyakorlat célja A technológiai funkciók olyan software vagy hardware eszközök, amelyek segítségével egy adott folyamatirányítási feladat könnyen
MSP430 programozás Energia környezetben. LED kijelzok második rész
 MSP430 programozás Energia környezetben LED kijelzok második rész 1 Lab13 SPI_595_7seg Egyszerű mintaprogram kétszámjegyű hétszegmenses LED kijelzővel, 74HC595 shift regiszterrel, SPI programkönyvtár használattal
MSP430 programozás Energia környezetben LED kijelzok második rész 1 Lab13 SPI_595_7seg Egyszerű mintaprogram kétszámjegyű hétszegmenses LED kijelzővel, 74HC595 shift regiszterrel, SPI programkönyvtár használattal
Bevezetés a mikrovezérlők programozásába: Fényérzékelés, fénymérés
 Bevezetés a mikrovezérlők programozásába: Fényérzékelés, fénymérés 1 Lab 19 projektek LDR_test.ino tesztprogram a fényérzékeny ellenálláshoz (LDR) TLS2561_and_LDR.ino LDR kalibrálása TLS2561 fénymérővel
Bevezetés a mikrovezérlők programozásába: Fényérzékelés, fénymérés 1 Lab 19 projektek LDR_test.ino tesztprogram a fényérzékeny ellenálláshoz (LDR) TLS2561_and_LDR.ino LDR kalibrálása TLS2561 fénymérővel
Arduino bevezető Szenzorhálózatok és alkalmazásaik
 Arduino bevezető Szenzorhálózatok és alkalmazásaik VITMMA09 Okos város MSc mellékspecializáció Mi az Arduino? Nyílt hardver és szoftver platform 8 bites Atmel mikrokontroller köré építve Ökoszisztéma:
Arduino bevezető Szenzorhálózatok és alkalmazásaik VITMMA09 Okos város MSc mellékspecializáció Mi az Arduino? Nyílt hardver és szoftver platform 8 bites Atmel mikrokontroller köré építve Ökoszisztéma:
Felhasználói kézikönyv. TB6560HQV3-T3 (V type) 3 tengelyes léptetőmotor vezérlő
 3 tengelyes léptetőmotor vezérlő") Felhasználói kézikönyv TB6560HQV3-T3 (V type) 3 tengelyes léptetőmotor vezérlő Mikrolépés lehetősége: 1, 1/2, 1/8, 1/16. A vezérlő 3 tengely meghajtására képes, egyszerűen bővíthető a rendszer egy 4. tengellyel.
Felhasználói kézikönyv TB6560HQV3-T3 (V type) 3 tengelyes léptetőmotor vezérlő Mikrolépés lehetősége: 1, 1/2, 1/8, 1/16. A vezérlő 3 tengely meghajtására képes, egyszerűen bővíthető a rendszer egy 4. tengellyel.
9.1.1. ARM mikrovezérlők programozása
 9.1.1. ARM mikrovezérlők programozása E fejezetben az ARM mikrovezérlők programozása lesz ismertetve néhány példaprogram és gyakorlati alkalmazás bemutatásával. Az általunk használt ARM mikrovezérlő gyártója
9.1.1. ARM mikrovezérlők programozása E fejezetben az ARM mikrovezérlők programozása lesz ismertetve néhány példaprogram és gyakorlati alkalmazás bemutatásával. Az általunk használt ARM mikrovezérlő gyártója
Mérési útmutató a Mobil Kommunikáció és Kvantumtechnológiák Laboratórium méréseihez
 Mérési útmutató a Mobil Kommunikáció és Kvantumtechnológiák Laboratórium méréseihez Internet of Things, avagy a Dolgok Internete Bevezető mérés Mérés helye: Hálózati Rendszerek és Szolgáltatások Tanszék
Mérési útmutató a Mobil Kommunikáció és Kvantumtechnológiák Laboratórium méréseihez Internet of Things, avagy a Dolgok Internete Bevezető mérés Mérés helye: Hálózati Rendszerek és Szolgáltatások Tanszék
Tanulmányozza az 5. pontnál ismertetett MATLAB-modell felépítést és működését a leírás alapján.
 Tevékenység: Rajzolja le a koordinaátarendszerek közti transzformációk blokkvázlatait, az önvezérelt szinkronmotor sebességszabályozási körének néhány megjelölt részletét, a rezolver felépítését és kimenőjeleit,
Tevékenység: Rajzolja le a koordinaátarendszerek közti transzformációk blokkvázlatait, az önvezérelt szinkronmotor sebességszabályozási körének néhány megjelölt részletét, a rezolver felépítését és kimenőjeleit,
MSP430 programozás Energia környezetben. LED kijelzok második rész
 MSP430 programozás Energia környezetben LED kijelzok második rész 1 Lab13 SPI_595_7seg Egyszerű mintaprogram kétszámjegyű hétszegmenses LED kijelzővel, 74HC595 shift regiszterrel, SPI programkönyvtár használattal
MSP430 programozás Energia környezetben LED kijelzok második rész 1 Lab13 SPI_595_7seg Egyszerű mintaprogram kétszámjegyű hétszegmenses LED kijelzővel, 74HC595 shift regiszterrel, SPI programkönyvtár használattal
MSP430 programozás Energia környezetben
 MSP430 programozás Energia környezetben lámpákról Mostan színes tintákról álmodom 1 Az RGB LED bemutatása Az RGB LED három, különböző színű LED egy közös tokban. A három szín a három alapszín, amelyből
MSP430 programozás Energia környezetben lámpákról Mostan színes tintákról álmodom 1 Az RGB LED bemutatása Az RGB LED három, különböző színű LED egy közös tokban. A három szín a három alapszín, amelyből
UC300-5LPT. USB CNC mozgásvezérlő MACH3 programhoz. Használati utasítás. Plugin verzió: V1.024
 Használati utasítás UC300-5LPT USB CNC mozgásvezérlő MACH3 programhoz Plugin verzió: V1.024 P olgardidesign Email: info@polgardidesign.hu Web: www.polgardidesign.hu 2013.07.29. UC300-5LPT rendeltetése:
Használati utasítás UC300-5LPT USB CNC mozgásvezérlő MACH3 programhoz Plugin verzió: V1.024 P olgardidesign Email: info@polgardidesign.hu Web: www.polgardidesign.hu 2013.07.29. UC300-5LPT rendeltetése:
MSP430 programozás Energia környezetben. Hétszegmenses LED kijelzok
 MSP430 programozás Energia környezetben Hétszegmenses LED kijelzok 1 A hétszegmenses kijelző A hétszegmenses kijelzők 7 db LED-et vagy LED csoportot tartalmaznak, olyan elrendezésben, hogy a 0 9 arab számjegyeket
MSP430 programozás Energia környezetben Hétszegmenses LED kijelzok 1 A hétszegmenses kijelző A hétszegmenses kijelzők 7 db LED-et vagy LED csoportot tartalmaznak, olyan elrendezésben, hogy a 0 9 arab számjegyeket
Bevezetés az Arduino mikrovezérlők programozásába
 Bevezetés az Arduino mikrovezérlők programozásába Milyen csodabogár az a mikrovezérlő? A mikrovezérlő egy tenyérnyi, programozható, elektronikus eszköz, amely képes más elektronikus alkatrészeket vezérelni.
Bevezetés az Arduino mikrovezérlők programozásába Milyen csodabogár az a mikrovezérlő? A mikrovezérlő egy tenyérnyi, programozható, elektronikus eszköz, amely képes más elektronikus alkatrészeket vezérelni.
MSP430 programozás Energia környezetben. LED mátrix vezérlése MAX7219 IC-vel
 MSP430 programozás Energia környezetben LED mátrix vezérlése MAX7219 IC-vel 1 LED 8x8 mátrix 3 mm-es piros LED-ek 8x8 mátrixba szervezve 1088AS vagy M1388AR típusnál a sorkiválasztó vonal a közös katód
MSP430 programozás Energia környezetben LED mátrix vezérlése MAX7219 IC-vel 1 LED 8x8 mátrix 3 mm-es piros LED-ek 8x8 mátrixba szervezve 1088AS vagy M1388AR típusnál a sorkiválasztó vonal a közös katód
Járműfedélzeti rendszerek I. 4. előadás Dr. Bécsi Tamás
 Járműfedélzeti rendszerek I. 4. előadás Dr. Bécsi Tamás Rendszer órajel Órajel osztás XTAL Divide Control (XDIV) Register 2 129 oszthat Órajel források CKSEL fuse bit Külső kristály/kerámia rezonátor Külső
Járműfedélzeti rendszerek I. 4. előadás Dr. Bécsi Tamás Rendszer órajel Órajel osztás XTAL Divide Control (XDIV) Register 2 129 oszthat Órajel források CKSEL fuse bit Külső kristály/kerámia rezonátor Külső
Mach3 tananyag. Egyszerű háromtengelyű marógép beállítása. A Mach3 2.5 szoftver alapján
 Mach3 tananyag Egyszerű háromtengelyű marógép beállítása A Mach3 2.5 szoftver alapján Cél A tananyag célja a felhasználó segítése és irányítása lépésről lépésre a Mach3 CNC vezérlő alkalmazás beállításában
Mach3 tananyag Egyszerű háromtengelyű marógép beállítása A Mach3 2.5 szoftver alapján Cél A tananyag célja a felhasználó segítése és irányítása lépésről lépésre a Mach3 CNC vezérlő alkalmazás beállításában
UH-zongora - zenélés mikrokontrollerrel
 UH-zongora - zenélés mikrokontrollerrel Beszeda Imre: 61. Fizikatanári Ankét, Szeged, 2018.március 14-17, eszközkiállítás A hangszer alapja egy ú.n. mikrokontroller (Arduino), ami egy ultrahangos távolságmérő
UH-zongora - zenélés mikrokontrollerrel Beszeda Imre: 61. Fizikatanári Ankét, Szeged, 2018.március 14-17, eszközkiállítás A hangszer alapja egy ú.n. mikrokontroller (Arduino), ami egy ultrahangos távolságmérő
Számítógépek. 2.a) Ismertesse a kombinációs hálózatok alapelemeit és a funkcionálisan teljes rendszer
 Ismertesse a kombinációs hálózatok alapelemeit és a funkcionálisan teljes rendszer") Számítógépek 1.a) Ismertesse az információ analóg és digitális leképzésének lehetőségeit, a számrendszereket és a gyakoribb kódrendszereket! Jellemezze a logikai függvényeket, és mutassa be az egyszerűsítési
Számítógépek 1.a) Ismertesse az információ analóg és digitális leképzésének lehetőségeit, a számrendszereket és a gyakoribb kódrendszereket! Jellemezze a logikai függvényeket, és mutassa be az egyszerűsítési
Aszinkrongépek működése, felépítése Készítette: Runyai Gábor 2006
 Aszinkrongépek működése, felépítése Készítette: Runyai GáborG 2006 Aszinkrongépek felépítése Állórész (stator) Anyaga öntöttvas, de lehet alumínium is. Lemezelt hornyaiban 1 vagy 3 fázisú tekercselés helyezkedik
Aszinkrongépek működése, felépítése Készítette: Runyai GáborG 2006 Aszinkrongépek felépítése Állórész (stator) Anyaga öntöttvas, de lehet alumínium is. Lemezelt hornyaiban 1 vagy 3 fázisú tekercselés helyezkedik
Ipari robotok hajtása
 IPARI ROBOTOK Ipari robotok hajtása 4. előad adás Dr. Pintér r JózsefJ A hajtási rendszerek feladata az, hogy a robot TCP pontját az előírt pontossággal - az irányítórendszer utasításainak megfelelően
IPARI ROBOTOK Ipari robotok hajtása 4. előad adás Dr. Pintér r JózsefJ A hajtási rendszerek feladata az, hogy a robot TCP pontját az előírt pontossággal - az irányítórendszer utasításainak megfelelően
Bevezetés az elektronikába
 Bevezetés az elektronikába 15. Arduino programozás Hétszegmenses kijelzők 2. rész 1 Betűvadászat A 7 db szegmens mindegyike lehet ki- vagy bekapcsolt állapotban. A lehetséges állapotok száma: 27 = 128
Bevezetés az elektronikába 15. Arduino programozás Hétszegmenses kijelzők 2. rész 1 Betűvadászat A 7 db szegmens mindegyike lehet ki- vagy bekapcsolt állapotban. A lehetséges állapotok száma: 27 = 128
Váltakozó áramú generátor, egyenáramú motor, léptető motor vizsgálata
 Váltakozó áramú generátor, egyenáramú motor, léptető motor vizsgálata Előzetes kérdések: mondatban írja le azt az elvet, ami alapján működik a váltakozó áramú generátor! Minek a megváltoztatásával tudja
Váltakozó áramú generátor, egyenáramú motor, léptető motor vizsgálata Előzetes kérdések: mondatban írja le azt az elvet, ami alapján működik a váltakozó áramú generátor! Minek a megváltoztatásával tudja
A G320 SERVOMOTOR MEGHAJTÓ ÜZEMBE HELYEZÉSE (2002. március 29.)
") A G320 SERVOMOTOR MEGHAJTÓ ÜZEMBE HELYEZÉSE (2002. március 29.) Köszönjük, hogy a G320 szervomotor meghajtót választotta. A G320 DC szervomotor meghajtóra a vásárlástól számítva 1 év gyártási hibákra kiterjedő
A G320 SERVOMOTOR MEGHAJTÓ ÜZEMBE HELYEZÉSE (2002. március 29.) Köszönjük, hogy a G320 szervomotor meghajtót választotta. A G320 DC szervomotor meghajtóra a vásárlástól számítva 1 év gyártási hibákra kiterjedő
Stepper Driver Cradle azaz Léptetőmotor vezérlő bölcső
 Stepper Driver Cradle azaz Léptetőmotor vezérlő bölcső 2016.05.03. A kedvenc illesztőkártyánkat összegyúrtuk 4db, 3D nyomtatásban kedvelt A4988 és DRV8825 modullal. Csatlakozó felülete szalagkábeles, így
Stepper Driver Cradle azaz Léptetőmotor vezérlő bölcső 2016.05.03. A kedvenc illesztőkártyánkat összegyúrtuk 4db, 3D nyomtatásban kedvelt A4988 és DRV8825 modullal. Csatlakozó felülete szalagkábeles, így
Bevezetés a mikrovezérlők programozásába: Az Arduino, mint logikai analizátor
 Bevezetés a mikrovezérlők programozásába: Az Arduino, mint logikai analizátor 1 Hasznos eszközök hibakereséshez Logikai áramkörök Logikai teszter Analóg áramkörök Voltmérő Logikai analizátor Oszcilloszkóp
Bevezetés a mikrovezérlők programozásába: Az Arduino, mint logikai analizátor 1 Hasznos eszközök hibakereséshez Logikai áramkörök Logikai teszter Analóg áramkörök Voltmérő Logikai analizátor Oszcilloszkóp
Bevezetés a mikrovezérlők programozásába: MAX6958: Hétszegmenses LED kijelző vezérlő
 Bevezetés a mikrovezérlők programozásába: MAX6958: Hétszegmenses LED kijelző vezérlő 1 Lab 20 projektek MiniPirate.ino Arduino Mini Pirate interaktív vizsgálóprogram, amelyet most az I2C busz kézivezérlésére
Bevezetés a mikrovezérlők programozásába: MAX6958: Hétszegmenses LED kijelző vezérlő 1 Lab 20 projektek MiniPirate.ino Arduino Mini Pirate interaktív vizsgálóprogram, amelyet most az I2C busz kézivezérlésére
MSP430 programozás Energia környezetben. Az I/O portok kezelése
 MSP430 programozás Energia környezetben Az I/O portok kezelése 1 Egyszerű I/O vezérlés Digitális I/O pinmode(pin, mode) kivezetés üzemmódjának beállítása digitalwrite(pin, state) - kimenetvezérlés digitalread(pin)
MSP430 programozás Energia környezetben Az I/O portok kezelése 1 Egyszerű I/O vezérlés Digitális I/O pinmode(pin, mode) kivezetés üzemmódjának beállítása digitalwrite(pin, state) - kimenetvezérlés digitalread(pin)
Kapcsolóüzemű tápegységek és visszahatásaik a hálózatra
 Miskolci Egyetem Gépészmérnöki és Informatikai Kar Elektrotechnikai - Elektronikai Tanszék Villamosmérnöki BSc alapszak Kapcsolóüzemű tápegységek és visszahatásaik a hálózatra Név: Szaka Gábor Tankör:
Miskolci Egyetem Gépészmérnöki és Informatikai Kar Elektrotechnikai - Elektronikai Tanszék Villamosmérnöki BSc alapszak Kapcsolóüzemű tápegységek és visszahatásaik a hálózatra Név: Szaka Gábor Tankör:
DC motor= egyenáramú motor, villanymotor vezérlése micro:bittel:
 + DC motor= egyenáramú motor, villanymotor vezérlése micro:bittel: A motor egyfajta eszköz, amely az elektromágneses indukció szerint a villamos energiát kinetikus energiává alakíthatja át. Sokféle motor
+ DC motor= egyenáramú motor, villanymotor vezérlése micro:bittel: A motor egyfajta eszköz, amely az elektromágneses indukció szerint a villamos energiát kinetikus energiává alakíthatja át. Sokféle motor
Hobbi Elektronika. Bevezetés az elektronikába: Boole algebra, logikai kifejezések
 Hobbi Elektronika Bevezetés az elektronikába: Boole algebra, logikai kifejezések 1 Felhasznált anyagok Mészáros Miklós: Logikai algebra alapjai, logikai függvények I. BME FKE: Logikai áramkörök Electronics-course.com:
Hobbi Elektronika Bevezetés az elektronikába: Boole algebra, logikai kifejezések 1 Felhasznált anyagok Mészáros Miklós: Logikai algebra alapjai, logikai függvények I. BME FKE: Logikai áramkörök Electronics-course.com:
LPT_4DM_2a. Bekötési utasítás
 LPT_4DM_2a Bekötési utasítás Az LPT illesztőkártya a PC-n futó mozgásvezérlő program ki-, és bemenőjeleit illeszti a CNC gép és a PC printer csatlakozója között. Főbb jellemzők: 4 tengely STEP és DIR jelei
LPT_4DM_2a Bekötési utasítás Az LPT illesztőkártya a PC-n futó mozgásvezérlő program ki-, és bemenőjeleit illeszti a CNC gép és a PC printer csatlakozója között. Főbb jellemzők: 4 tengely STEP és DIR jelei
Programozható logikai vezérlõk
 BUDAPESTI MÛSZAKI EGYETEM KÖZLEKEDÉSMÉRNÖKI KAR KÖZLEKEDÉSAUTOMATIKAI TANSZÉK Programozható logikai vezérlõk Segédlet az Irányítástechnika I. c. tárgyhoz Összeállította: Szabó Géza egyetemi tanársegéd
BUDAPESTI MÛSZAKI EGYETEM KÖZLEKEDÉSMÉRNÖKI KAR KÖZLEKEDÉSAUTOMATIKAI TANSZÉK Programozható logikai vezérlõk Segédlet az Irányítástechnika I. c. tárgyhoz Összeállította: Szabó Géza egyetemi tanársegéd
AGV rendszer fejlesztése
 Budapesti Műszaki és Gazdaságtudományi Egyetem Villamosmérnöki és Informatikai Kar Irányítástechnika és Informatika Tanszék Szabó Lőrinc E8I9IC Szabó Oszkár Albert - UBHPZC AGV rendszer fejlesztése Önálló
Budapesti Műszaki és Gazdaságtudományi Egyetem Villamosmérnöki és Informatikai Kar Irányítástechnika és Informatika Tanszék Szabó Lőrinc E8I9IC Szabó Oszkár Albert - UBHPZC AGV rendszer fejlesztése Önálló
MSP430 programozás Energia környezetben. Alfanumerikus LCD kijelzok
 MSP430 programozás Energia környezetben Alfanumerikus LCD kijelzok 1 LCD = Liquid Crystal Display (folyadékkristály kijelző) Folyadékkristály: olyan (szerves ) anyag, mely sűrű folyadéknak tekinthető,
MSP430 programozás Energia környezetben Alfanumerikus LCD kijelzok 1 LCD = Liquid Crystal Display (folyadékkristály kijelző) Folyadékkristály: olyan (szerves ) anyag, mely sűrű folyadéknak tekinthető,
Programozható Vezérlő Rendszerek. Hardver
 Programozható Vezérlő Rendszerek Hardver Hardver-bemeneti kártyák 12-24 Vdc 100-120 Vac 10-60 Vdc 12-24 Vac/dc 5 Vdc (TTL) 200-240 Vac 48 Vdc 24 Vac Belül 5V DC!! 2 Hardver-bemeneti kártyák Potenciál ingadozások
Programozható Vezérlő Rendszerek Hardver Hardver-bemeneti kártyák 12-24 Vdc 100-120 Vac 10-60 Vdc 12-24 Vac/dc 5 Vdc (TTL) 200-240 Vac 48 Vdc 24 Vac Belül 5V DC!! 2 Hardver-bemeneti kártyák Potenciál ingadozások
IRC beüzemelése Mach3-hoz IRC Frekvenciaváltó vezérlő áramkör Inverter Remote Controller
 IRC beüzemelése Mach3-hoz IRC Frekvenciaváltó vezérlő áramkör Inverter Remote Controller A PicoPower család tagja 2012-10-19 A Pico IRC használatával szoftverből állíthatjuk a frekvenciaváltóval vezérelt
IRC beüzemelése Mach3-hoz IRC Frekvenciaváltó vezérlő áramkör Inverter Remote Controller A PicoPower család tagja 2012-10-19 A Pico IRC használatával szoftverből állíthatjuk a frekvenciaváltóval vezérelt
= szinkronozó nyomatékkal egyenlő.
 A 4.45. ábra jelöléseit használva, tételezzük fel, hogy gépünk túllendült és éppen a B pontban üzemel. Mivel a motor által szolgáltatott M 2 nyomaték nagyobb mint az M 1 terhelőnyomaték, a gép forgórészére
A 4.45. ábra jelöléseit használva, tételezzük fel, hogy gépünk túllendült és éppen a B pontban üzemel. Mivel a motor által szolgáltatott M 2 nyomaték nagyobb mint az M 1 terhelőnyomaték, a gép forgórészére
Számítógép perifériák I.
 Perifériák csoportosítása I. Output perifériák: monitor nyomtató plotter hangszóró Számítógép perifériák I. II. Input perifériák: billentyűzet egér szkenner kamerák mikrofon III. Háttértárak Pl: Mágneses
Perifériák csoportosítása I. Output perifériák: monitor nyomtató plotter hangszóró Számítógép perifériák I. II. Input perifériák: billentyűzet egér szkenner kamerák mikrofon III. Háttértárak Pl: Mágneses
Colin Hargis Elektromágneses összeférhetõség - útmutató erõsáramú mérnökök részére
 Colin Hargis Elektromágneses összeférhetõség - útmutató erõsáramú mérnökök részére A Control Techniques Plc, mint a hajtástechnika vezetõ világcége fontosnak tartja, hogy a legkorszerûbb technológia felhasználásával
Colin Hargis Elektromágneses összeférhetõség - útmutató erõsáramú mérnökök részére A Control Techniques Plc, mint a hajtástechnika vezetõ világcége fontosnak tartja, hogy a legkorszerûbb technológia felhasználásával
TEE - Adásvételi szerződés keretében informatikai kutatási eszközök és szoftverek beszerzése a Pázmány Péter Katolikus Egyetem számára
 TEE - Adásvételi szerződés keretében informatikai kutatási eszközök és szoftverek beszerzése a Pázmány Péter Katolikus Egyetem számára Közbeszerzési Értesítő száma: 2015/146 Beszerzés tárgya: Árubeszerzés
TEE - Adásvételi szerződés keretében informatikai kutatási eszközök és szoftverek beszerzése a Pázmány Péter Katolikus Egyetem számára Közbeszerzési Értesítő száma: 2015/146 Beszerzés tárgya: Árubeszerzés
Two countries, one goal, joint success! PROJEKT HURO/0901/028/2.3.1
 PROJEKT HURO/0901/028/2.3.1 NAGYVÁRADI EGYETEM 2011 PROJEKT HURO/0901/028/2.3.1 NAGYVÁRADI EGYETEM 2011 ELŐSZÓ A E-Laboratory Practical Teaching for Applied Engineering Sciences (Akronym EPRAS) c. projekt
PROJEKT HURO/0901/028/2.3.1 NAGYVÁRADI EGYETEM 2011 PROJEKT HURO/0901/028/2.3.1 NAGYVÁRADI EGYETEM 2011 ELŐSZÓ A E-Laboratory Practical Teaching for Applied Engineering Sciences (Akronym EPRAS) c. projekt
Bevezetés a mikrovezérlők programozásába: A PM6025 (7 és 16 szegmenses) LCD kijelző vezérlése
 LCD kijelző vezérlése") Bevezetés a mikrovezérlők programozásába: A PM6025 (7 és 16 szegmenses) LCD kijelző vezérlése 1 Lab 21 projektek MiniPirate.ino Arduino Mini Pirate, interaktív vizsgálóprogram, amelyet itt az I2C busz
Bevezetés a mikrovezérlők programozásába: A PM6025 (7 és 16 szegmenses) LCD kijelző vezérlése 1 Lab 21 projektek MiniPirate.ino Arduino Mini Pirate, interaktív vizsgálóprogram, amelyet itt az I2C busz
Bevezetés a mikrovezérlők programozásába: Ismerkedés az Arduino fejlesztői környezettel
 Bevezetés a mikrovezérlők programozásába: Ismerkedés az Arduino fejlesztői környezettel 1 Ajánlott irodalom Aduino LLC.: Arduino Language Reference ATMEL: ATmega328p mikrovezérlő adatlapja Brian W. Kernighan,
Bevezetés a mikrovezérlők programozásába: Ismerkedés az Arduino fejlesztői környezettel 1 Ajánlott irodalom Aduino LLC.: Arduino Language Reference ATMEL: ATmega328p mikrovezérlő adatlapja Brian W. Kernighan,
Országzászlók (2015. május 27., Sz14)
") Országzászlók (2015. május 27., Sz14) Írjon programot, amely a standard bemenetről állományvégjelig soronként egy-egy ország zászlójára vonatkozó adatokat olvas be! Az egyes zászlóknál azt tartjuk nyilván,
Országzászlók (2015. május 27., Sz14) Írjon programot, amely a standard bemenetről állományvégjelig soronként egy-egy ország zászlójára vonatkozó adatokat olvas be! Az egyes zászlóknál azt tartjuk nyilván,
Megjegyzés: A leírás abszolút kezdők számára készült elnézést azoktól, akik ezen a szinten már túlvannak!
 rézcső-hurok ügyességi játék a felügyelet mikrokontrollerrel (Arduino) van megoldva Beszeda Imre 61. Fizikatanári Ankét, Szeged, 2018.március 14-17, eszközkiállítás A közismert ügyességi játék lényege,
rézcső-hurok ügyességi játék a felügyelet mikrokontrollerrel (Arduino) van megoldva Beszeda Imre 61. Fizikatanári Ankét, Szeged, 2018.március 14-17, eszközkiállítás A közismert ügyességi játék lényege,
Bevezetés a mikrovezérlők programozásába: I/O portok kezelése, számrendszerek, bitműveletek
 Bevezetés a mikrovezérlők programozásába: I/O portok kezelése, számrendszerek, bitműveletek 1 Ajánlott irodalom Aduino LLC.: Arduino Language Reference ATMEL: ATmega328p mikrovezérlő adatlapja Brian W.
Bevezetés a mikrovezérlők programozásába: I/O portok kezelése, számrendszerek, bitműveletek 1 Ajánlott irodalom Aduino LLC.: Arduino Language Reference ATMEL: ATmega328p mikrovezérlő adatlapja Brian W.
Bevezetés a Modbus kommunikációba
 Bevezetés a Modbus kommunikációba Mobus szervezet Teljesen ingyenes, nyílt-forrású rendszer nem licenc köteles http://www.modbus.org Modbus eszköz kereső motor http://www.modbus.org/devices.php - soros
Bevezetés a Modbus kommunikációba Mobus szervezet Teljesen ingyenes, nyílt-forrású rendszer nem licenc köteles http://www.modbus.org Modbus eszköz kereső motor http://www.modbus.org/devices.php - soros
54 523 01 0000 00 00 Elektronikai technikus Elektronikai technikus
 A 10/07 (II. 27.) SzMM rendelettel módosított 1/06 (II. 17.) OM rendelet Országos Képzési Jegyzékről és az Országos Képzési Jegyzékbe történő felvétel és törlés eljárási rendjéről alapján. Szakképesítés,
A 10/07 (II. 27.) SzMM rendelettel módosított 1/06 (II. 17.) OM rendelet Országos Képzési Jegyzékről és az Országos Képzési Jegyzékbe történő felvétel és törlés eljárási rendjéről alapján. Szakképesítés,
A DELPHYS UPS ÁRAMKÖREI.
 UPS technika. Villamos hálózatok zavar analízis vizsgálata. Termikus mérések. Mérésszolgáltatás. 1 A DELPHYS UPS ÁRAMKÖREI. Ver.: 1.0 Készült: 2001.12.03. Ellenőrizve: 2001.12.03. Utolsó módositás: 2006.06.19.
UPS technika. Villamos hálózatok zavar analízis vizsgálata. Termikus mérések. Mérésszolgáltatás. 1 A DELPHYS UPS ÁRAMKÖREI. Ver.: 1.0 Készült: 2001.12.03. Ellenőrizve: 2001.12.03. Utolsó módositás: 2006.06.19.
ad 2) Kapcsolási rajz
 Kapcsolási rajz") ad 2) Kapcsolási rajz Conrad Szaküzlet 1067 Budapest, Teréz krt. 23. Tel: (061) 302-3588 Conrad Vevőszolgálat 1124 Budapest, Jagelló út 30. Tel: (061) 319-0250 Hangkártya modul Rendelési szám: 23 42 19
ad 2) Kapcsolási rajz Conrad Szaküzlet 1067 Budapest, Teréz krt. 23. Tel: (061) 302-3588 Conrad Vevőszolgálat 1124 Budapest, Jagelló út 30. Tel: (061) 319-0250 Hangkártya modul Rendelési szám: 23 42 19
Élelmiszeripari folyamatirányítás 2016.03.12.
 Élelmiszeripari folyamatirányítás 2016.03.12. Hidraulikus rendszerek Közeg: hidraulika-olaj Nyomástartomány: ált. 200-400 bar Előnyök: Hátrányok: - Nagy erők kifejtésére alkalmas (200-400 bar!) - Kisebb
Élelmiszeripari folyamatirányítás 2016.03.12. Hidraulikus rendszerek Közeg: hidraulika-olaj Nyomástartomány: ált. 200-400 bar Előnyök: Hátrányok: - Nagy erők kifejtésére alkalmas (200-400 bar!) - Kisebb
Vegyes témakörök. 5. Gagyiszkóp házilag hangfrekvenciás jelek vizsgálata. Hobbielektronika csoport 2018/2019. Debreceni Megtestesülés Plébánia
 Vegyes témakörök 5. Gagyiszkóp házilag hangfrekvenciás jelek vizsgálata 1 Analóg és digitális oszcilloszkópok Analóg oszcilloszkóp: a katódsugárcső vízszintes eltérítését egy ramp generátor a függőleges
Vegyes témakörök 5. Gagyiszkóp házilag hangfrekvenciás jelek vizsgálata 1 Analóg és digitális oszcilloszkópok Analóg oszcilloszkóp: a katódsugárcső vízszintes eltérítését egy ramp generátor a függőleges
ELŐADÁS 2016-01-05 SZÁMÍTÓGÉP MŰKÖDÉSE FIZIKA ÉS INFORMATIKA
 ELŐADÁS 2016-01-05 SZÁMÍTÓGÉP MŰKÖDÉSE FIZIKA ÉS INFORMATIKA A PC FIZIKAI KIÉPÍTÉSÉNEK ALAPELEMEI Chip (lapka) Mikroprocesszor (CPU) Integrált áramköri lapok: alaplap, bővítőkártyák SZÁMÍTÓGÉP FELÉPÍTÉSE
ELŐADÁS 2016-01-05 SZÁMÍTÓGÉP MŰKÖDÉSE FIZIKA ÉS INFORMATIKA A PC FIZIKAI KIÉPÍTÉSÉNEK ALAPELEMEI Chip (lapka) Mikroprocesszor (CPU) Integrált áramköri lapok: alaplap, bővítőkártyák SZÁMÍTÓGÉP FELÉPÍTÉSE
UC100 USB CNC mozgásvezérlő MACH3 programhoz Plugin verzió: V2.105
 Használati utasítás UC100 USB CNC mozgásvezérlő MACH3 programhoz Plugin verzió: V2.105 P olgardidesign Email: info@polgardidesign.hu Web: www.polgardidesign.hu 2012.07.22. UC100 rendeltetése: A Mach3-as
Használati utasítás UC100 USB CNC mozgásvezérlő MACH3 programhoz Plugin verzió: V2.105 P olgardidesign Email: info@polgardidesign.hu Web: www.polgardidesign.hu 2012.07.22. UC100 rendeltetése: A Mach3-as
Programozás II gyakorlat. 4. Öröklődés
 Programozás II gyakorlat 4. Öröklődés Feladat Egy játékfejlesztő cég olyan programot fejleszt, amely nyilvántartja az alkalmazottai adatait. Tároljuk minden személy: Nevét (legfeljebb 50 karakter) Születési
Programozás II gyakorlat 4. Öröklődés Feladat Egy játékfejlesztő cég olyan programot fejleszt, amely nyilvántartja az alkalmazottai adatait. Tároljuk minden személy: Nevét (legfeljebb 50 karakter) Születési
VLT Micro Drive. Kis frekvenciaváltó maximális terherbírás és megbízhatóság
 1 VLT Micro Drive Kis frekvenciaváltó maximális terherbírás és megbízhatóság IP 20-as mechanikai védettség A hűtőventilátor közvetlenül nem szellőzteti át az elektronikát Minőségi kondenzátorok Működés
1 VLT Micro Drive Kis frekvenciaváltó maximális terherbírás és megbízhatóság IP 20-as mechanikai védettség A hűtőventilátor közvetlenül nem szellőzteti át az elektronikát Minőségi kondenzátorok Működés
MSP430 programozás Energia környezetben. Az első lépések
 MSP430 programozás Energia környezetben Az első lépések Előfeltételek Előfeltételek Alapszíntű C programozási ismeretek (Kernighan és Ritchie könyv) A C könyvtárak és fejléc állományok használatának alapszintű
MSP430 programozás Energia környezetben Az első lépések Előfeltételek Előfeltételek Alapszíntű C programozási ismeretek (Kernighan és Ritchie könyv) A C könyvtárak és fejléc állományok használatának alapszintű
MSP430 programozás Energia környezetben. Nokia 5110 grafikus kijelzo vezérlése
 MSP430 programozás Energia környezetben Nokia 5110 grafikus kijelzo vezérlése 1 Nokia 5110 kijelző Grafikus (képpontonként vezérelhető) LCD Felbontás: 84 x 48 pont (PCD8544 kontroller) Vezérlés: SPI felület
MSP430 programozás Energia környezetben Nokia 5110 grafikus kijelzo vezérlése 1 Nokia 5110 kijelző Grafikus (képpontonként vezérelhető) LCD Felbontás: 84 x 48 pont (PCD8544 kontroller) Vezérlés: SPI felület
Tarján Péter Nyíregyházi Egyetem. Szenzorok és ötletek Arduinós mérésekhez
 Tarján Péter Nyíregyházi Egyetem Szenzorok és ötletek Arduinós mérésekhez BH1750 megvilágítás Spektrális érzékenysége az emberi szemhez hasonló Közvetlenül luxban adja vissza a megvilágítás értékét Lineáris
Tarján Péter Nyíregyházi Egyetem Szenzorok és ötletek Arduinós mérésekhez BH1750 megvilágítás Spektrális érzékenysége az emberi szemhez hasonló Közvetlenül luxban adja vissza a megvilágítás értékét Lineáris
Bevezetés az elektronikába
 Bevezetés az elektronikába 16. Arduino programozás Hétszegmenses kijelző alkalmazások 1 Emlékeztető: TM1637 4-jegyű kijelző Két vezetékes, kétirányú, szinkron soros kommunikáció nyugtázással. Az átvitelt
Bevezetés az elektronikába 16. Arduino programozás Hétszegmenses kijelző alkalmazások 1 Emlékeztető: TM1637 4-jegyű kijelző Két vezetékes, kétirányú, szinkron soros kommunikáció nyugtázással. Az átvitelt
Mintavételes szabályozás mikrovezérlő segítségével
 Automatizálási Tanszék Mintavételes szabályozás mikrovezérlő segítségével Budai Tamás budai.tamas@sze.hu http://maxwell.sze.hu/~budait Tartalom Mikrovezérlőkről röviden Programozási alapismeretek ismétlés
Automatizálási Tanszék Mintavételes szabályozás mikrovezérlő segítségével Budai Tamás budai.tamas@sze.hu http://maxwell.sze.hu/~budait Tartalom Mikrovezérlőkről röviden Programozási alapismeretek ismétlés
Bevezetés az elektronikába
 Bevezetés az elektronikába 13. Arduino programozás analóg I/O Hobbielektronika csoport 2018/2019 1 Debreceni Megtestesülés Plébánia PWM: impulzus-szélesség moduláció PWM = pulse width modulation (impulzus-szélesség
Bevezetés az elektronikába 13. Arduino programozás analóg I/O Hobbielektronika csoport 2018/2019 1 Debreceni Megtestesülés Plébánia PWM: impulzus-szélesség moduláció PWM = pulse width modulation (impulzus-szélesség
Helikopter motorok beállítása
 Helikopter motorok beállítása A heli motorjának helyes beállítása nem egyszerű feladat, mivel azt üzem közben nem lehet elvégezni a motoron. Ezért megpróbálok pár ötletet adni a helimotorok helyes beállításához.
Helikopter motorok beállítása A heli motorjának helyes beállítása nem egyszerű feladat, mivel azt üzem közben nem lehet elvégezni a motoron. Ezért megpróbálok pár ötletet adni a helimotorok helyes beállításához.
MSP430 programozás Energia környezetben. Digitális szenzorok
 MSP430 programozás Energia környezetben Digitális szenzorok 1 Adatgyűjtés, adatkonverzió A külvilág fizikai jellemzői többnyire az idő függvényének folytonos változói. Ezek érzékelése és digitálisan feldolgozhatóvá
MSP430 programozás Energia környezetben Digitális szenzorok 1 Adatgyűjtés, adatkonverzió A külvilág fizikai jellemzői többnyire az idő függvényének folytonos változói. Ezek érzékelése és digitálisan feldolgozhatóvá
VILLAMOSMÉRNÖKÖK RÉSZÉRE MEGHIRDETETT SZAKDOLGOZAT TÉMÁK 2012/13.II. és 2013/2014 I. félévekre
 VILLAMOSMÉRNÖKÖK RÉSZÉRE MEGHIRDETETT SZAKDOLGOZAT TÉMÁK 2012/13.II. és 2013/2014 I. félévekre Tartalomjegyzék IPARI PARTNEREINK ÁLTAL MEGHIRDETETT TÉMÁK... 3 1. Basic Scan Tool (SW) kifejlesztése... 3
VILLAMOSMÉRNÖKÖK RÉSZÉRE MEGHIRDETETT SZAKDOLGOZAT TÉMÁK 2012/13.II. és 2013/2014 I. félévekre Tartalomjegyzék IPARI PARTNEREINK ÁLTAL MEGHIRDETETT TÉMÁK... 3 1. Basic Scan Tool (SW) kifejlesztése... 3
ACS 100 Felhasználói Kézikönyv
 ACS 100 Felhasználói Kézikönyv ACS 100 Felhasználói kézikönyv Felhasználói kézikönyv ACS 100 Biztonsági előírások Figyelem! Az ACS 100-as frekvenciaváltót csak képzett szakember helyezheti üzembe. Figyelem!
ACS 100 Felhasználói Kézikönyv ACS 100 Felhasználói kézikönyv Felhasználói kézikönyv ACS 100 Biztonsági előírások Figyelem! Az ACS 100-as frekvenciaváltót csak képzett szakember helyezheti üzembe. Figyelem!
Budapesti Műszaki- és Gazdaságtudományi Egyetem Villamosmérnöki és Informatikai Kar MIT. Nagyteljesítményű mikrovezérlők tantárgy [vimim342]
![Budapesti Műszaki- és Gazdaságtudományi Egyetem Villamosmérnöki és Informatikai Kar MIT. Nagyteljesítményű mikrovezérlők tantárgy [vimim342]](/thumbs/39/18932349.jpg "Budapesti Műszaki- és Gazdaságtudományi Egyetem Villamosmérnöki és Informatikai Kar MIT. Nagyteljesítményű mikrovezérlők tantárgy [vimim342]") Budapesti Műszaki- és Gazdaságtudományi Egyetem Villamosmérnöki és Informatikai Kar MIT Nagyteljesítményű mikrovezérlők tantárgy [vimim342] 8x8x8 LED Cube Készítette: Szikra István URLJRN Tartalomjegyzék
Budapesti Műszaki- és Gazdaságtudományi Egyetem Villamosmérnöki és Informatikai Kar MIT Nagyteljesítményű mikrovezérlők tantárgy [vimim342] 8x8x8 LED Cube Készítette: Szikra István URLJRN Tartalomjegyzék
A különbözõ módszerek hatásossága és jellemzõ tulajdonságai
 Frekvenciaváltók tápláló hálózatára ható felharmonikus terhelés csökkentése Megoldások a Control Techniques feszültséginvertereiben Az erõsáramú elektronikus berendezések nemlineáris és kapcsolóüzemû részegységei
Frekvenciaváltók tápláló hálózatára ható felharmonikus terhelés csökkentése Megoldások a Control Techniques feszültséginvertereiben Az erõsáramú elektronikus berendezések nemlineáris és kapcsolóüzemû részegységei
M-LINE 80.2 M-LINE 125.2 M-LINE 95.4. Kezelési utasítás..autoradiokeret.
 WWW M-LINE 80.2 M-LINE 125.2 Kezelési utasítás.autoradiokeret. HU Gratulálunk az Ön új GLADEN erősítőjéhez. Az erősítő üzembehelyezése előtt, kérjük figyelmesen olvassa el ezen használati utasítást és
WWW M-LINE 80.2 M-LINE 125.2 Kezelési utasítás.autoradiokeret. HU Gratulálunk az Ön új GLADEN erősítőjéhez. Az erősítő üzembehelyezése előtt, kérjük figyelmesen olvassa el ezen használati utasítást és
5 Egyéb alkalmazások. 5.1 Akkumulátorok töltése és kivizsgálása. 5.1.1 Akkumulátor típusok
 5 Egyéb alkalmazások A teljesítményelektronikai berendezések két fõ csoportját a tápegységek és a motorhajtások alkotják. Ezekkel azonban nem merülnek ki az alkalmazási lehetõségek. A továbbiakban a fennmaradt
5 Egyéb alkalmazások A teljesítményelektronikai berendezések két fõ csoportját a tápegységek és a motorhajtások alkotják. Ezekkel azonban nem merülnek ki az alkalmazási lehetõségek. A továbbiakban a fennmaradt
Felhasználói kézikönyv
 Felhasználói kézikönyv 760K Digitális Gépjármű Diagnosztikai Multiméter TARTALOMJEGYZÉK 1. Bevezetés... 2 2. Biztonsági figyelmeztetések... 2 3. Előlap és kezelőszervek... 3 4. Műszaki jellemzők... 4 5.
Felhasználói kézikönyv 760K Digitális Gépjármű Diagnosztikai Multiméter TARTALOMJEGYZÉK 1. Bevezetés... 2 2. Biztonsági figyelmeztetések... 2 3. Előlap és kezelőszervek... 3 4. Műszaki jellemzők... 4 5.
MSP430 programozás Energia környezetben. Nem élhetek muzsikaszó nélkül
 MSP430 programozás Energia környezetben Nem élhetek muzsikaszó nélkül 1 Hogyan zenélhetünk a mikrovezérlő segítségével? Egyszerű hangkeltési módszer: Négyszöghullámokat keltünk valamelyik kimeneten A kimenetre
MSP430 programozás Energia környezetben Nem élhetek muzsikaszó nélkül 1 Hogyan zenélhetünk a mikrovezérlő segítségével? Egyszerű hangkeltési módszer: Négyszöghullámokat keltünk valamelyik kimeneten A kimenetre
Megszólal a Kütyü. Arduino bevezető hangszóró vezérlése 1 / 5 oldal
 Megszólal a Kütyü Ahhoz, hogy szóra bírjuk a mikrovezérlőt, nem árt egy kicsit tisztában lennünk a hang fizikai alapjaival és a hangszórók működésével. A hang nem más, mint a levegő nyomásának gyors változása,
Megszólal a Kütyü Ahhoz, hogy szóra bírjuk a mikrovezérlőt, nem árt egy kicsit tisztában lennünk a hang fizikai alapjaival és a hangszórók működésével. A hang nem más, mint a levegő nyomásának gyors változása,
LIN, BSS, PCM Protokollok (COM Interfész) Szeptember
 Szeptember") LIN, BSS, PCM Protokollok (COM Interfész) 2013. Szeptember Témakörök Háromfázisú generátorok Generátor feszülts ltségszabályzók Digitális vezérl rlésű szabályz lyzók Feszülts ltségszabályzó mérések Digitális
LIN, BSS, PCM Protokollok (COM Interfész) 2013. Szeptember Témakörök Háromfázisú generátorok Generátor feszülts ltségszabályzók Digitális vezérl rlésű szabályz lyzók Feszülts ltségszabályzó mérések Digitális
Fordulatszámmérő és szabályozó áramkör tervezése egyenáramú kefés motorhoz
 MISKOLCI EGYETEM Gépészmérnöki és Informatikai Kar Automatizálási és Infokommunikációs Intézeti Tanszéke Villamosmérnöki BSc szak Ipari automatizálás és kommunikáció szakirány Fordulatszámmérő és szabályozó
MISKOLCI EGYETEM Gépészmérnöki és Informatikai Kar Automatizálási és Infokommunikációs Intézeti Tanszéke Villamosmérnöki BSc szak Ipari automatizálás és kommunikáció szakirány Fordulatszámmérő és szabályozó
A stabil üzemű berendezések tápfeszültségét a hálózati feszültségből a hálózati tápegység állítja elő (1.ábra).
.") 3.10. Tápegységek Az elektronikus berendezések (így a rádiók) működtetéséhez egy vagy több stabil tápfeszültség szükséges. A stabil tápfeszültség időben nem változó egyenfeszültség, melynek értéke független
3.10. Tápegységek Az elektronikus berendezések (így a rádiók) működtetéséhez egy vagy több stabil tápfeszültség szükséges. A stabil tápfeszültség időben nem változó egyenfeszültség, melynek értéke független
KNX távirat nyugtázása. Épületinformatika. KNX távirat példa. KNX távirat példa
 KNX távirat nyugtázása A vevo az adatcsomagok végén lévo keresztparitás és a távirat végén lévo hosszparitás segítségével elleno rzi, hogy a távirat helyesen érkezett-e meg. A vevo t2 ido letelte után
KNX távirat nyugtázása A vevo az adatcsomagok végén lévo keresztparitás és a távirat végén lévo hosszparitás segítségével elleno rzi, hogy a távirat helyesen érkezett-e meg. A vevo t2 ido letelte után
Figyelmeztetések FIGYELMEZTETÉS:
 Figyelmeztetések Kezeléssel és karbantartással kapcsolatos A készülék kizárólag beltéri használatra alkalmas Tűz és áramütés veszélyének elkerülése érdekében ne tegye ki a készüléket nevedsségnek vagy
Figyelmeztetések Kezeléssel és karbantartással kapcsolatos A készülék kizárólag beltéri használatra alkalmas Tűz és áramütés veszélyének elkerülése érdekében ne tegye ki a készüléket nevedsségnek vagy
Vegyes témakörök. ARDUINO a kispénzű amatőrök PLC-je. Hobbielektronika csoport 2017/2018. Debreceni Megtestesülés Plébánia
 Vegyes témakörök ARDUINO a kispénzű amatőrök PLC-je 1 Az előadás tartalma PLC vagy mikrovezérlő? Egyszerű PLC helyetesítő Arduinoval A be- és kimenetek védelme optocsatolóval A PLC Ladder Simulator alkalmazás
Vegyes témakörök ARDUINO a kispénzű amatőrök PLC-je 1 Az előadás tartalma PLC vagy mikrovezérlő? Egyszerű PLC helyetesítő Arduinoval A be- és kimenetek védelme optocsatolóval A PLC Ladder Simulator alkalmazás
Önálló laboratórium dokumentáció
 Önálló laboratórium dokumentáció Fémgolyó irányítása játéktáblán neuroheadset segítségével Készítette: Trásy Tamás BJ1E43 Konzulens: Mészáros Tamás A feladat, és annak módosítása Az eredeti elképzelés
Önálló laboratórium dokumentáció Fémgolyó irányítása játéktáblán neuroheadset segítségével Készítette: Trásy Tamás BJ1E43 Konzulens: Mészáros Tamás A feladat, és annak módosítása Az eredeti elképzelés
4. Mérés Szinkron Generátor
 4. Mérés Szinkron Generátor Elsődleges üzemállaot szerint beszélhetünk szinkron generátorról és szinkron motorról, attól függően, hogy a szinkron gé elsődlegesen generátoros vagy motoros üzemállaotban
4. Mérés Szinkron Generátor Elsődleges üzemállaot szerint beszélhetünk szinkron generátorról és szinkron motorról, attól függően, hogy a szinkron gé elsődlegesen generátoros vagy motoros üzemállaotban
Pico Power 3. www.picopower.hu. www.picopower.hu
 Pico Power 3 A Pico Power3 táppanel a Pico Power 2 továbbfejlesztett verziója. A változás: csak egy segédfeszültséggel rendelkezik, de az kapcsolóüzemű, 2A terhelhetőségű, és változtatható kimeneti feszültségű:
Pico Power 3 A Pico Power3 táppanel a Pico Power 2 továbbfejlesztett verziója. A változás: csak egy segédfeszültséggel rendelkezik, de az kapcsolóüzemű, 2A terhelhetőségű, és változtatható kimeneti feszültségű:
Programozás és Digitális technika I. Pógár István eng.unideb.hu/pogari
 Programozás és Digitális technika I. Pógár István pogari@eng.unideb.hu eng.unideb.hu/pogari Ajánlott irodalom Massimo Banzi Getting Started with Arduino Michael Margolis Make an Android Controlled Robot
Programozás és Digitális technika I. Pógár István pogari@eng.unideb.hu eng.unideb.hu/pogari Ajánlott irodalom Massimo Banzi Getting Started with Arduino Michael Margolis Make an Android Controlled Robot
C X / C X L / C X S F R E K V E N C I A V Á L T Ó K
 V A C O N C X / C X L / C X S F R E K V E N C I A V Á L T Ó K F e l h a s z n á l ó i K é z i k ö n y v Ö t a z e g y b e n + A l k a l m a z á s i K é z i k ö n y v Az elızetes bejelentés nélküli változtatás
V A C O N C X / C X L / C X S F R E K V E N C I A V Á L T Ó K F e l h a s z n á l ó i K é z i k ö n y v Ö t a z e g y b e n + A l k a l m a z á s i K é z i k ö n y v Az elızetes bejelentés nélküli változtatás
DIGITÁLIS TECHNIKA 7-ik előadás
 IGITÁLI TECHNIKA 7-ik előadás Előadó: r. Oniga István Egyetemi docens 2/2 II félév zekvenciális (sorrendi) hálózatok zekvenciális hálózatok fogalma Tárolók tárolók JK tárolók T és típusú tárolók zámlálók
IGITÁLI TECHNIKA 7-ik előadás Előadó: r. Oniga István Egyetemi docens 2/2 II félév zekvenciális (sorrendi) hálózatok zekvenciális hálózatok fogalma Tárolók tárolók JK tárolók T és típusú tárolók zámlálók
Mikrovezérlők Alkalmazástechnikája
 Gingl Zoltán, 2013, Szeged Mikrovezérlők Alkalmazástechnikája 2015.06.28. 22:20 Működést támogató perifériák és használatuk 1 A processzornak ütemjel (órajel) szükséges Számos periféria órajelét is adja
Gingl Zoltán, 2013, Szeged Mikrovezérlők Alkalmazástechnikája 2015.06.28. 22:20 Működést támogató perifériák és használatuk 1 A processzornak ütemjel (órajel) szükséges Számos periféria órajelét is adja
Kezelési Útmutató DVR 411M Digitális rögzítő. (Cserélhető HDD-vel)
") Kezelési Útmutató DVR 411M Digitális rögzítő. (Cserélhető HDD-vel) 1. Tartalomjegyzék: 1. Tartalomjegyzék... 3 2. A készülék bemutatása...4 3. A DVR üzembe helyezése...5 A. Csatlakoztatás a monitorhoz...5
Kezelési Útmutató DVR 411M Digitális rögzítő. (Cserélhető HDD-vel) 1. Tartalomjegyzék: 1. Tartalomjegyzék... 3 2. A készülék bemutatása...4 3. A DVR üzembe helyezése...5 A. Csatlakoztatás a monitorhoz...5
Telepítési utasítás ORU-30
 TART TECH KFT. 9611 Csénye, Sport u. 26. Tel.: 95/310-221 Fax: 95/310-222 Mobil: 30/9973-852 E-mail: tarttech@mail.globonet.hu Telepítési utasítás ORU-30 típusú univerzális 10 lépcsős vezérlőegységhez
TART TECH KFT. 9611 Csénye, Sport u. 26. Tel.: 95/310-221 Fax: 95/310-222 Mobil: 30/9973-852 E-mail: tarttech@mail.globonet.hu Telepítési utasítás ORU-30 típusú univerzális 10 lépcsős vezérlőegységhez