MISKOLCI EGYETEM GÉPÉSZMÉRNÖKI ÉS INFORMATIKAI KAR
|
|
|
- Ágoston Deák
- 6 évvel ezelőtt
- Látták:
Átírás
1 MISKOLCI EGYETEM GÉPÉSZMÉRNÖKI ÉS INFORMATIKAI KAR Korszerű információs technológiák Robot operációs rendszerek Tompa Tamás tanársegéd Általános Informatikai Intézeti Tanszék Miskolc, október 20. ; november 09.
 valós robot (TurtleBot, Lego")
2 Tartalom Robotika Robot operációs rendszerek ROS OpenRTM-aist Demonstráció : ) valós robot (TurtleBot, Lego EV3, btrover)

3 Robotika - bevezetés Mi a robot? A robot egy elektromechanikai szerkezet, amely előzetes programozás alapján képes különböző feladatok végrehajtására. A robotika 3 alaptörvénye A robotnak nem szabad kárt okoznia emberi lényben vagy tétlenül tűrnie, hogy emberi lény bármilyen kárt szenvedjen. A robot engedelmeskedni tartozik az emberi lények utasításainak, kivéve, ha ezek az utasítások az első törvény előírásaiba ütköznének. A robot tartozik saját védelméről gondoskodni, amennyiben ez nem ütközik az első és a második törvény előírásaiba.
4 Robotika - bevezetés Népszerű tématerület Sok, készletben (készen) megvásárolható robot létezik De sokan építenek is robotot barkács, hobby célból kutatási célból is pl. ember-robot interakció vizsgálata építsek vagy vegyek? cél függő

5 Robotika robotok csoportosítása Robotok csoportosítása Mobilitás alapján mobil helyhez kötött Felhasználás alapján anyagmozgató technológiai műveletet elvégző szociális Mobil robotok kinematikájuk alapján Helyhez kötött robotok kinematikájuk alapján
6 Robotika robotok csoportosítása Mobil robotok kinematikájuk alapján differenciális holonomikus egyéb Helyhez kötött robotok kinematikájuk alapján párhuzamos kinematikájú láncolt kinematikájú vegyes kinematikájú kinematika: robotmozgás leírása sebesség alapján matematikai feladat (koordináta transzformációk stb.)






7 Robotika robotok csoportosítása Differenciális vs. holonomikus hajtás






8 Robotika néhány szociális robot




9 Robotika néhány ipari robot

10 Robotika hardver
11 Robotika hardver Beágyazott rendszer néhány előre meghatározott feladatot lát el tartalmazhat olyan feladat-specifikus mechanikus és elektronikus alkatrészeket, melyek nem találhatók egy általános célú számítógépben A robot beágyazott rendszerekből épül fel mikrovezérlők (ARM, AVR, PIC, stb.) motorok szenzorok stb.

12 Robotika btrover hardver blokkvázlata
 szenzoroktól, stb.")
13 Robotika hardver Beágyazott rendszer feladata Jelek előállítása a motorok működtetéséhez szervok működtetéséhez szenzoroknak, stb. Jelek olvasása motorok enkódereitől (motor pozíciók) szenzoroktól, stb. Olvasott jelek feldolgozása Távolságszámítás, ütközésérzékelés, stb.
 ezek csak az alacsonyszintű funkciókat valósítják meg Mitől tud majd egy összetettebb problémát megoldani?")
14 Robotika Csak csupán a beágyazott rendszerei segítségével nem tud önállóan valamilyen összetettebb feladatot, problémát megoldani pl. nem tud embert felismerni vagy térképet készíteni a környezetéről (SLAM) ezek csak az alacsonyszintű funkciókat valósítják meg Mitől tud majd egy összetettebb problémát megoldani? programozni kell magát a robotot. Hogyan? megoldás: központi PC, robot operációs rendszerrel kommunikációs kapcsolat a robot központi mikrovezérlőjével
15 Robot operációs rendszerek Eszköz komplex robot rendszer fejlesztéséhez egységes felületet biztosítsanak robotok programozására szabványosított komponensekkel kommunikációs csatornákkal programozói API-kal automatizmusokkal eszközökkel komponens alapú szemlélet
16 Robot operációs rendszerek Főbb funkcióik érzékelők, beavatkozók kezelése, integrációja vezérlési architektúra létrehozása kommunikációs csatornák definiálása működés közben adatok gyűjtése tesztelés meglévő adatmintákkal

17 Robot operációs rendszerek Példa komponens alapú szemléletre




18 Robot operációs rendszerek Elterjedtebbek: ROS OpenRTM-aist YARP OpenRDK
19 Robot operációs rendszerek Hogyan valósul meg a kommunikáció a köpntti PC és a robot hardvere között? általában soros port a mikrovezérlőn PC oldalon USB (virtuális soros port) kommunikáció adatkeretek segítségével keretfej + adat (több byte) + checksum adatkeretek írása a sororporta -> robot vezérlése adatkeretek olvasása a sorosportról
20 Robot Operating System Amerikai fejlesztésű, nyílt forráskódú rendszer 2007 Stanford Artificial Intelligence Laboratory (SAIL) a Stanford AI Robot projekt keretében, 2008-ban csatlakozott a fejlesztéshez a Willow Garage és még számos kutatócsoport
21 Támogatott OS Linux (főként) Mac OS X Windows Támogatott programozási nyelvek C++ Python
22 Az eddig megjelent ROS disztribúciók: Box Turtle (2010 Február) C Turtle (2010 Augusztus) Diamondback (2011 Február) Electric Emys (2011 Augusztus) Fuerte Turtle (2012 Március) Groovy Galapagos (2012 Október) Hydro (2013 szeptember) Indigo (2014 július) Jade (2015 május) Kinect Kame (2016 május) Lunar (2017 május)


23 Néhány ROS kompatibilis robot

24
25 A rendszer felépítése Nodes (csomópontok) Master (központi vezérlő) Parameter server (paraméter szerver) Messages (üzenetek) Topics (topik-ok, üzenetsorok) Services (szervizek, szolgáltatások) Bags
26 Csomópontok (nodes) Node-oknak,a rendszer futtatható alkalmazásait nevezik, melyek jól meghatározott feladatot hajtanak végre. A rendszerben több ilyen node is lehetséges. Központi vezérlő (master) A master a rendszer fontos eleme, ő valósítja meg az egyes csomópontok, illetve a rendszer elemi közötti kommunikációt, futtatókörnyezetet biztosítva azoknak. Paraméter szerver (parameter server) A csomópontoknak lehet segítségével paramétereket átadni, akár a csomópontok futása közben is.
27 Üzenetek (messages) A csomópontok kommunikációja üzeneteken keresztül történik, ezen üzenetek segítségével továbbítanak adatot egymásnak. Az üzenet tartalmazza a továbbítandó adatot. A rendszer tartalmaz előre beépített üzenettípusokat, de lehetőséget biztosít a fejlesztő számára, hogy saját üzenettípust is definiálhasson. Üzenetsorok, topik-ok (topics) A rendszer az üzenetek továbbítására üzenetsorokat, úgynevezett topikokat biztosít. Mikor egy csomópont üzenetet küld egy másik csomópont számára, akkor ezt egy üzenetsoron keresztül valósítja meg. A publikáló csomópont közzéteszi üzenetét a topikban, majd a fogadó csomópont pedig kiolvassa onnan. A rendszer lehetőséget biztosít saját, új topikok definiálásra, mindegyik topik saját névvel ellátva él a rendszerben.
28 Szervizek, szolgáltatások (services) A csomópontok közötti kommunikáció megvalósításának másik módja. A csomópontok közötti kérés-válasz típusú kommunikációt hívatottak megvalósítani. Bags Rendszerbeli üzenetek, adatok mentésére és azok visszajátszására biztosítanak lehetőséget. Fejlesztésnél különösen hasznos lehet például az egyes szenzorok által küldött adatok mentésére, majd azok visszajátszására tesztelés céljából.

29 Topic vs. Service
30 ROS fájlrendszer szerkezet

31 Jegyzékszerkezet, példa

32 Fontosabb parancsok és jelentésük
33 Telepíteni és konfigurálni kell a rendszert roscore szuperprocessz, központi mag, mindig futnia kell ROS workspace létrehozása catkin_init_workspace; ROS munkaterület, itt lesznek a node-ok catkin_ws jegyzékben ROS node létrehozása catkin_create_pkg <package_name> [depend1] [depend2] ROS node-ok fordítása catkin_make (a catkin_ws-ben!) ROS node futtatása rosrun [package_name] [node_name]
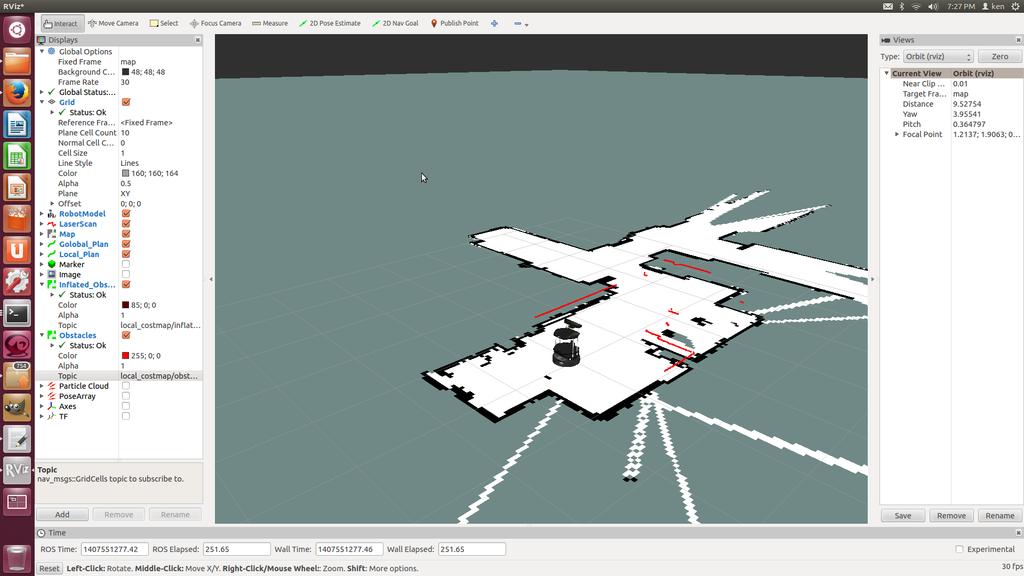
34 RVIZ - vizualizáció
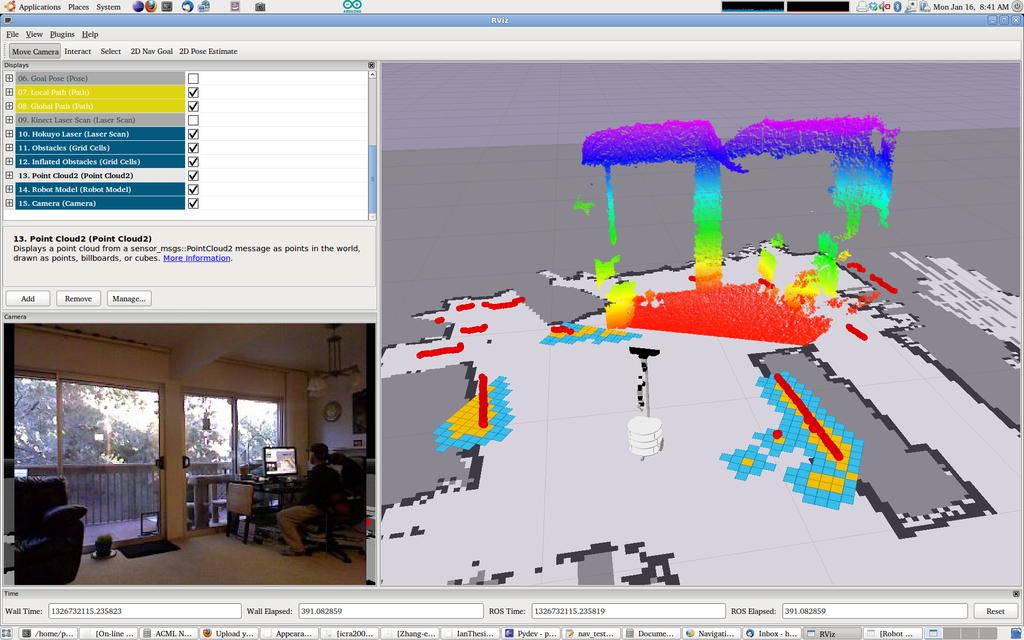
35 RVIZ - vizualizáció
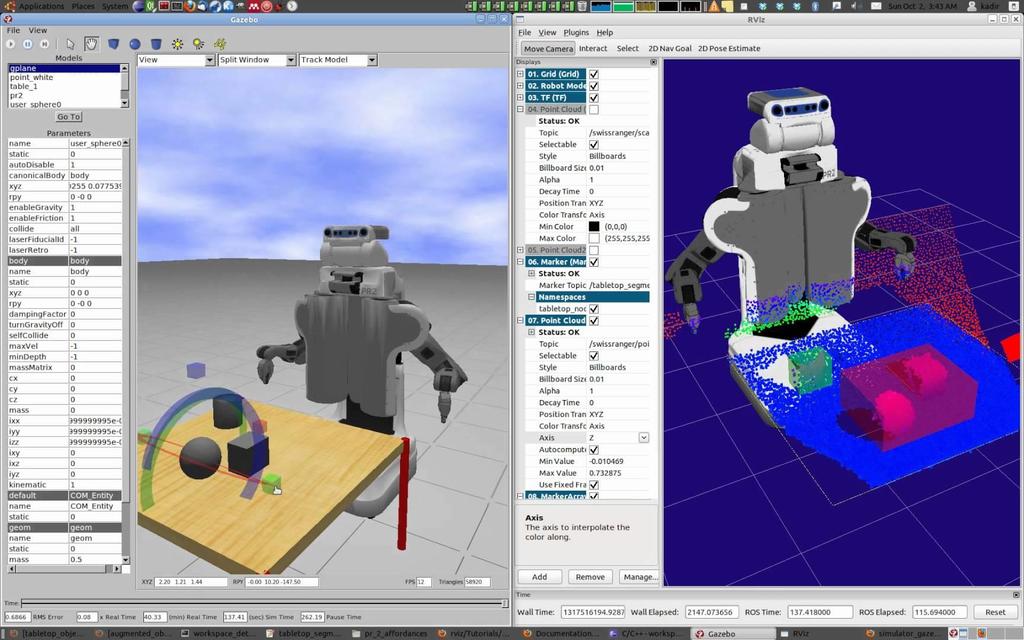
36 Gazebo - szimuláció
37 URDF robotmodel leíró xml
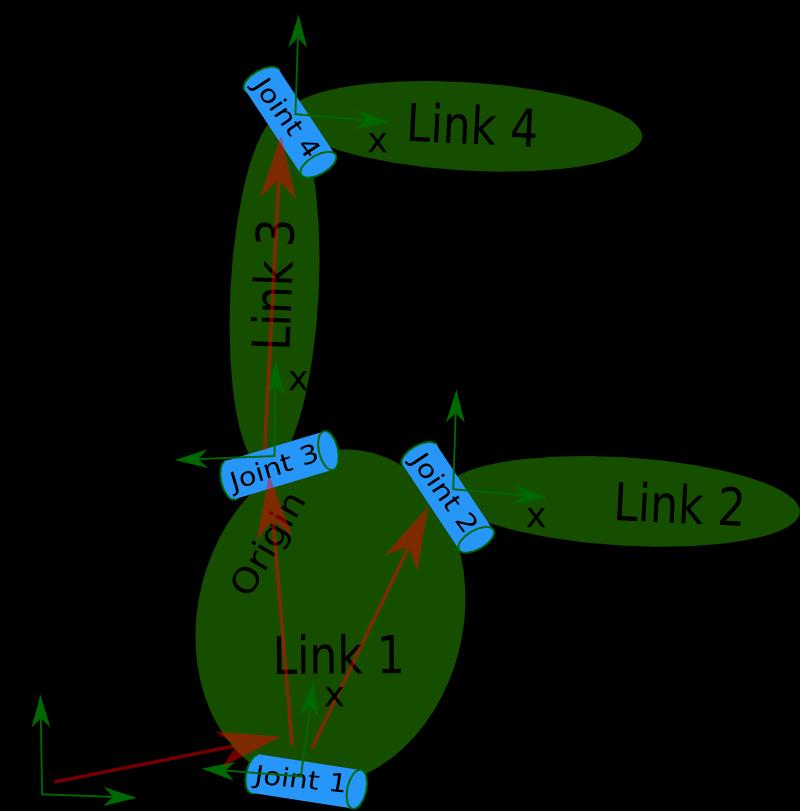

38 URDF

39 URDF model RVIZ-ben
40 Az RT-Middleware Robotvezérlő keretrendszer RT = Robot Technology Middleware: köztes réteg, az operációs rendszer és az alkalmazás között helyezkedik el Egy vázat biztosít, melyet feltölthetünk azzal a logikával, amely az adott problémát megoldja Önmagában nem használható, használatához olyan implementációra van szükség, amely teljesíti a specifikáció által definiált interfészeket. Ezekkel az interfészekkel lehetséges, hogy a komponensek, a middleware rendszer által vezérelve fussanak. CORBA alapú implementáció 40/17
41 Az OpenRTM RT-Middleware specifikáció nagy részét megvalósítja Japán fejlesztés Komponens alapú szemlélet Számos segédszoftver (pl.: RTSystemEditor) Több platform támogatása (Windows, Linux) Több programozási nyelv támogatása (Java, C++) Nyílt forráskódú 41/17
42 Az OpenRTM A rendszer komponensei több részből állnak Konfigurációs állományok Osztályok (programkód) Adatportok, szolgáltatás portok (IDL) A komponensek állapotai létrehozott aktív inaktív hibás 42/17
43 A komponens alapú szemlélet Minden komponens jól meghatározott feladatot lát el Rugalmas, könnyen bővíthető új modulokkal OpenRTM-aist Nyílt forráskódú RT-Middlware implementáció (AIST) RT-Middleware 43/17
 RTC RTC RTC RTC RTC RTC RTC RTC RT-Middleware Futtató környezet=> RT-Middleware(RTM) RTC kommunikáció hálózaton keresztül (névszerver) 44/17 44")
44 RT-Middleware és RT-komponensek Logika hardver vezérlés algoritmusok alkalmazások stb RT komponens Framework RT komponens Logika/algoritmus közös interfészekkel = RT-Komponens (RTC) RTC RTC RTC RTC RTC RTC RTC RTC RT-Middleware Futtató környezet=> RT-Middleware(RTM) RTC kommunikáció hálózaton keresztül (névszerver) 44/17 44

45 Az OpenRTM Eclipse fejlesztőkörnyezet RTC Builder 45/17

46 Az OpenRTM Eclipse fejlesztőkörnyezet RT System Editor 46/17

47 A rendszer működése - példa 47/17
48 Felhasznált irodalom Aaron Martinez, Enrique Fernández - Learning ROS for Robotics Programming
49 Köszönöm a figyelmet!
Robot Operating System
 Robot Operating System 1 Robot Operating System A ROS egy meta-operációs rendszer, amely könyvtárai és eszközei segítségével teszi lehetővé a szoftver-fejlesztők számára robot alkalmazások fejlesztését.
Robot Operating System 1 Robot Operating System A ROS egy meta-operációs rendszer, amely könyvtárai és eszközei segítségével teszi lehetővé a szoftver-fejlesztők számára robot alkalmazások fejlesztését.
Szárazföldi autonóm mobil robotok vezérlőrendszerének kialakítási lehetőségei. Kucsera Péter ZMNE Doktorandusz
 Szárazföldi autonóm mobil robotok vezérlőrendszerének kialakítási lehetőségei. Kucsera Péter ZMNE Doktorandusz A mobil robot vezérlőrendszerének feladatai Elvégzendő feladat Kommunikáció Vezérlő rendszer
Szárazföldi autonóm mobil robotok vezérlőrendszerének kialakítási lehetőségei. Kucsera Péter ZMNE Doktorandusz A mobil robot vezérlőrendszerének feladatai Elvégzendő feladat Kommunikáció Vezérlő rendszer
MISKOLCI EGYETEM GÉPÉSZMÉRNÖKI ÉS INFORMATIKAI KAR
 MISKOLCI EGYETEM GÉPÉSZMÉRNÖKI ÉS INFORMATIKAI KAR AUTOMATIZÁLÁSI ÉS INFOKOMMUNIKÁCIÓS INTÉZETI TANSZÉK ÁLTALÁNOS INFORMATIKAI TANSZÉK Robot Operating System távérzékelés periféria Diplomamunka Készítette:
MISKOLCI EGYETEM GÉPÉSZMÉRNÖKI ÉS INFORMATIKAI KAR AUTOMATIZÁLÁSI ÉS INFOKOMMUNIKÁCIÓS INTÉZETI TANSZÉK ÁLTALÁNOS INFORMATIKAI TANSZÉK Robot Operating System távérzékelés periféria Diplomamunka Készítette:
Norway Grants. Az akkumulátor mikromenedzsment szabályozás - BMMR - fejlesztés technológiai és műszaki újdonságai. Kakuk Zoltán, Vision 95 Kft.
 Norway Grants AKKUMULÁTOR REGENERÁCIÓS ÉS Az akkumulátor mikromenedzsment szabályozás - BMMR - fejlesztés technológiai és műszaki újdonságai Kakuk Zoltán, Vision 95 Kft. 2017.04.25. Rendszer szintű megoldás
Norway Grants AKKUMULÁTOR REGENERÁCIÓS ÉS Az akkumulátor mikromenedzsment szabályozás - BMMR - fejlesztés technológiai és műszaki újdonságai Kakuk Zoltán, Vision 95 Kft. 2017.04.25. Rendszer szintű megoldás
A LEGO Mindstorms EV3 programozása
 A LEGO Mindstorms EV3 programozása 1. A fejlesztői környezet bemutatása 12. Az MPU6050 gyorsulás- és szögsebességmérő szenzor Orosz Péter 1 Felhasznált irodalom LEGO MINDSTORMS EV3: Felhasználói útmutató
A LEGO Mindstorms EV3 programozása 1. A fejlesztői környezet bemutatása 12. Az MPU6050 gyorsulás- és szögsebességmérő szenzor Orosz Péter 1 Felhasznált irodalom LEGO MINDSTORMS EV3: Felhasználói útmutató
Élettartam teszteknél alkalmazott programstruktúra egy váltóvezérlő példáján keresztül
 Élettartam teszteknél alkalmazott programstruktúra egy váltóvezérlő példáján keresztül 1 Tartalom Miről is lesz szó? Bosch GS-TC Automata sebességváltó TCU (Transmission Control Unit) Élettartam tesztek
Élettartam teszteknél alkalmazott programstruktúra egy váltóvezérlő példáján keresztül 1 Tartalom Miről is lesz szó? Bosch GS-TC Automata sebességváltó TCU (Transmission Control Unit) Élettartam tesztek
Közösség, projektek, IDE
 Eclipse Közösség, projektek, IDE Eclipse egy nyílt forráskódú (open source) projekteken dolgozó közösség, céljuk egy kiterjeszthető fejlesztői platform és keretrendszer fejlesztése, amely megoldásokkal
Eclipse Közösség, projektek, IDE Eclipse egy nyílt forráskódú (open source) projekteken dolgozó közösség, céljuk egy kiterjeszthető fejlesztői platform és keretrendszer fejlesztése, amely megoldásokkal
Dr. Schuster György október 30.
 Real-time operációs rendszerek RTOS 2015. október 30. Jellemzők ONX POSIX kompatibilis, Jellemzők ONX POSIX kompatibilis, mikrokernel alapú, Jellemzők ONX POSIX kompatibilis, mikrokernel alapú, nem kereskedelmi
Real-time operációs rendszerek RTOS 2015. október 30. Jellemzők ONX POSIX kompatibilis, Jellemzők ONX POSIX kompatibilis, mikrokernel alapú, Jellemzők ONX POSIX kompatibilis, mikrokernel alapú, nem kereskedelmi
Ember és robot együttműködése a gyártásban Ipar 4.0
 Helyszín: MTA Székház, Felolvasóterem Időpont: 2017. November 7. Ember és robot együttműködése a gyártásban Ipar 4.0 Dr. Erdős Ferenc Gábor MTA SZTAKI Fejlett robotika ígérete A fejlett robotika és az
Helyszín: MTA Székház, Felolvasóterem Időpont: 2017. November 7. Ember és robot együttműködése a gyártásban Ipar 4.0 Dr. Erdős Ferenc Gábor MTA SZTAKI Fejlett robotika ígérete A fejlett robotika és az
Könyvtári címkéző munkahely
 Könyvtári címkéző munkahely Tartalomjegyzék A RENDSZER HARDVER ELEMEI...3 1 RFID CÍMKÉK... 3 2 RFID ASZTALI OLVASÓ... 3 A RENDSZER SZOFTVER ELEMEI... 4 1 KÖNYV CÍMKÉZŐ MUNKAÁLLOMÁS... 4 2 A PC- S SZOFTVEREK
Könyvtári címkéző munkahely Tartalomjegyzék A RENDSZER HARDVER ELEMEI...3 1 RFID CÍMKÉK... 3 2 RFID ASZTALI OLVASÓ... 3 A RENDSZER SZOFTVER ELEMEI... 4 1 KÖNYV CÍMKÉZŐ MUNKAÁLLOMÁS... 4 2 A PC- S SZOFTVEREK
Book Template Title. Author Last Name, Author First Name
 Book Template Title Author Last Name, Author First Name Book Template Title Author Last Name, Author First Name I. rész - Szoftver technológia 1. fejezet - Esettanulmány Bevezetés Az alkalmazás fejlesztésére
Book Template Title Author Last Name, Author First Name Book Template Title Author Last Name, Author First Name I. rész - Szoftver technológia 1. fejezet - Esettanulmány Bevezetés Az alkalmazás fejlesztésére
IoT alapú mezőgazdasági adatgyűjtő prototípus fejlesztési tapasztalatok
 IoT alapú mezőgazdasági adatgyűjtő prototípus fejlesztési tapasztalatok 2016.05.19. Szilágyi Róbert Tóth Mihály Debreceni Egyetem Az IoT Eszközök és más fizikai objektumok elektronikával, vezérléssel,
IoT alapú mezőgazdasági adatgyűjtő prototípus fejlesztési tapasztalatok 2016.05.19. Szilágyi Róbert Tóth Mihály Debreceni Egyetem Az IoT Eszközök és más fizikai objektumok elektronikával, vezérléssel,
Szolgáltatásintegráció (VIMIM234) tárgy bevezető
 tárgy bevezető") Szolgáltatásintegráció Szolgáltatásintegráció (VIMIM234) tárgy bevezető Gönczy László gonczy@mit.bme.hu A tárgyról A tantárgy célja a hallgatók megismertetése a komplex informatikai rendszerek integrációs
Szolgáltatásintegráció Szolgáltatásintegráció (VIMIM234) tárgy bevezető Gönczy László gonczy@mit.bme.hu A tárgyról A tantárgy célja a hallgatók megismertetése a komplex informatikai rendszerek integrációs
Nyílt forráskódú irodai programkomponensek vállalati környezetbe való integrációjának vizsgálata és implementációja
 1 / 15 Nyílt forráskódú irodai programkomponensek vállalati környezetbe való integrációjának vizsgálata és implementációja Vajna Miklós 2012. január 24. Tartalomjegyzék 2 / 15 1 Bevezető 2 Motiváció 3
1 / 15 Nyílt forráskódú irodai programkomponensek vállalati környezetbe való integrációjának vizsgálata és implementációja Vajna Miklós 2012. január 24. Tartalomjegyzék 2 / 15 1 Bevezető 2 Motiváció 3
Projekt beszámoló. NEWSIT News basedearlywarning System forintradaytrading: Hír alapú Korai Figyelmeztető Rendszer Napon belüli Kereskedéshez
 Projekt beszámoló Projekt azonosítója: Projektgazda neve: Projekt címe: DAOP-1.3.1-12-2012-0080 Pénzügyi Innovációs Iroda Kft. NEWSIT News basedearlywarning System forintradaytrading: Hír alapú Korai Figyelmeztető
Projekt beszámoló Projekt azonosítója: Projektgazda neve: Projekt címe: DAOP-1.3.1-12-2012-0080 Pénzügyi Innovációs Iroda Kft. NEWSIT News basedearlywarning System forintradaytrading: Hír alapú Korai Figyelmeztető
Házi feladatok Szenzorhálózatok és alkalmazásaik
 Házi feladatok Szenzorhálózatok és alkalmazásaik VITMMA09 Okos város MSc mellékspecializáció Általános tudnivalók 6 téma 6 db. 4 fős csoport A házi feladat elvégzése kötelező, a vizsgára jelentkezés feltétele
Házi feladatok Szenzorhálózatok és alkalmazásaik VITMMA09 Okos város MSc mellékspecializáció Általános tudnivalók 6 téma 6 db. 4 fős csoport A házi feladat elvégzése kötelező, a vizsgára jelentkezés feltétele
Autóipari beágyazott rendszerek. Komponens és rendszer integráció
 Autóipari beágyazott rendszerek és rendszer integráció 1 Magas szintű fejlesztési folyamat SW architektúra modellezés Modell (VFB) Magas szintű modellezés komponensek portok interfészek adattípusok meghatározása
Autóipari beágyazott rendszerek és rendszer integráció 1 Magas szintű fejlesztési folyamat SW architektúra modellezés Modell (VFB) Magas szintű modellezés komponensek portok interfészek adattípusok meghatározása
Digitális technika VIMIAA01 9. hét Fehér Béla BME MIT
 BUDAPESTI MŰSZAKI ÉS GAZDASÁGTUDOMÁNYI EGYETEM VILLAMOSMÉRNÖKI ÉS INFORMATIKAI KAR MÉRÉSTECHNIKA ÉS INFORMÁCIÓS RENDSZEREK TANSZÉK Digitális technika VIMIAA01 9. hét Fehér Béla BME MIT Eddig Tetszőleges
BUDAPESTI MŰSZAKI ÉS GAZDASÁGTUDOMÁNYI EGYETEM VILLAMOSMÉRNÖKI ÉS INFORMATIKAI KAR MÉRÉSTECHNIKA ÉS INFORMÁCIÓS RENDSZEREK TANSZÉK Digitális technika VIMIAA01 9. hét Fehér Béla BME MIT Eddig Tetszőleges
Digitális technika VIMIAA01 9. hét
 BUDAPESTI MŰSZAKI ÉS GAZDASÁGTUDOMÁNYI EGYETEM VILLAMOSMÉRNÖKI ÉS INFORMATIKAI KAR MÉRÉSTECHNIKA ÉS INFORMÁCIÓS RENDSZEREK TANSZÉK Digitális technika VIMIAA01 9. hét Fehér Béla BME MIT Eddig Tetszőleges
BUDAPESTI MŰSZAKI ÉS GAZDASÁGTUDOMÁNYI EGYETEM VILLAMOSMÉRNÖKI ÉS INFORMATIKAI KAR MÉRÉSTECHNIKA ÉS INFORMÁCIÓS RENDSZEREK TANSZÉK Digitális technika VIMIAA01 9. hét Fehér Béla BME MIT Eddig Tetszőleges
Tartalomjegyzék. Bevezetés. 1. A.NET 3.5-keretrendszer 1. A korszerű alkalmazások felépítésének kihívásai... 2
 Bevezetés xv Mitől tartozik egy platform a következő generációhoz?... xvi Mennyire jelentős az egyre újabb.net-változatok közötti különbség?... xviii Mit jelentett a Windows Vista megjelenése a Microsoft.NET
Bevezetés xv Mitől tartozik egy platform a következő generációhoz?... xvi Mennyire jelentős az egyre újabb.net-változatok közötti különbség?... xviii Mit jelentett a Windows Vista megjelenése a Microsoft.NET
Integrációs mellékhatások és gyógymódok a felhőben. Géczy Viktor Üzletfejlesztési igazgató
 Integrációs mellékhatások és gyógymódok a felhőben Géczy Viktor Üzletfejlesztési igazgató Middleware projektek sikertelenségeihez vezethet Integrációs (interfész) tesztek HIÁNYA Tesztadatok? Emulátorok?
Integrációs mellékhatások és gyógymódok a felhőben Géczy Viktor Üzletfejlesztési igazgató Middleware projektek sikertelenségeihez vezethet Integrációs (interfész) tesztek HIÁNYA Tesztadatok? Emulátorok?
OPENCV TELEPÍTÉSE SZÁMÍTÓGÉPES LÁTÁS ÉS KÉPFELDOLGOZÁS. Tanács Attila Képfeldolgozás és Számítógépes Grafika Tanszék Szegedi Tudományegyetem
 OPENCV TELEPÍTÉSE SZÁMÍTÓGÉPES LÁTÁS ÉS KÉPFELDOLGOZÁS Tanács Attila Képfeldolgozás és Számítógépes Grafika Tanszék Szegedi Tudományegyetem OpenCV Nyílt forráskódú szoftver (BSD licensz) Számítógépes látás,
OPENCV TELEPÍTÉSE SZÁMÍTÓGÉPES LÁTÁS ÉS KÉPFELDOLGOZÁS Tanács Attila Képfeldolgozás és Számítógépes Grafika Tanszék Szegedi Tudományegyetem OpenCV Nyílt forráskódú szoftver (BSD licensz) Számítógépes látás,
SZENZORMODUL ILLESZTÉSE LEGO NXT PLATFORMHOZ. Készítette: Horváth András MSc Önálló laboratórium 2 Konzulens: Orosz György
 SZENZORMODUL ILLESZTÉSE LEGO NXT PLATFORMHOZ Készítette: Horváth András MSc Önálló laboratórium 2 Konzulens: Orosz György BEVEZETÉS Simonyi Károly szakkollégium LEGO és robotika kör NXT Cél: Választott
SZENZORMODUL ILLESZTÉSE LEGO NXT PLATFORMHOZ Készítette: Horváth András MSc Önálló laboratórium 2 Konzulens: Orosz György BEVEZETÉS Simonyi Károly szakkollégium LEGO és robotika kör NXT Cél: Választott
ZBI Zebra Basic Interpreter
 ZBI Zebra Basic Interpreter Alkalmazási útmutató. TERMÉK ÁTTEKINTÉS: ZBI - Zebra BASIC Interpreter A ZBI-vel kéznél van az új alkalmazások létrehozásához és a bonyolult nyomtatási problémák megoldásához
ZBI Zebra Basic Interpreter Alkalmazási útmutató. TERMÉK ÁTTEKINTÉS: ZBI - Zebra BASIC Interpreter A ZBI-vel kéznél van az új alkalmazások létrehozásához és a bonyolult nyomtatási problémák megoldásához
Az MTA Cloud a tudományos alkalmazások támogatására. Kacsuk Péter MTA SZTAKI
 Az MTA Cloud a tudományos alkalmazások támogatására Kacsuk Péter MTA SZTAKI Kacsuk.Peter@sztaki.mta.hu Tudományos alkalmazások és skálázhatóság Kétféle skálázhatóság: o Vertikális: dinamikusan változik
Az MTA Cloud a tudományos alkalmazások támogatására Kacsuk Péter MTA SZTAKI Kacsuk.Peter@sztaki.mta.hu Tudományos alkalmazások és skálázhatóság Kétféle skálázhatóság: o Vertikális: dinamikusan változik
Programozás és Digitális technika I. Pógár István eng.unideb.hu/pogari
 Programozás és Digitális technika I. Pógár István pogari@eng.unideb.hu eng.unideb.hu/pogari Ajánlott irodalom Massimo Banzi Getting Started with Arduino Michael Margolis Make an Android Controlled Robot
Programozás és Digitális technika I. Pógár István pogari@eng.unideb.hu eng.unideb.hu/pogari Ajánlott irodalom Massimo Banzi Getting Started with Arduino Michael Margolis Make an Android Controlled Robot
Java I. A Java programozási nyelv
 Java I. A Java programozási nyelv története,, alapvető jellemzői Miskolci Egyetem Általános Informatikai Tanszék Utolsó módosítás: 2007. 02. 12. Java I.: Történet, jellemzők, JDK JAVA1 / 1 Egy kis történelem
Java I. A Java programozási nyelv története,, alapvető jellemzői Miskolci Egyetem Általános Informatikai Tanszék Utolsó módosítás: 2007. 02. 12. Java I.: Történet, jellemzők, JDK JAVA1 / 1 Egy kis történelem
Termeléshatékonyság mérés Ipar 4.0 megoldásokkal a nyomdaiparban
 PRESENTATION Termeléshatékonyság mérés Ipar 4.0 megoldásokkal a nyomdaiparban Kremzer, Péter ICCS Kft. kremzerp@iccs.hu Tartalomjegyzék Folyamatirányítás FIR nélkül Nyomdai sajátosságok Megrendelői igények
PRESENTATION Termeléshatékonyság mérés Ipar 4.0 megoldásokkal a nyomdaiparban Kremzer, Péter ICCS Kft. kremzerp@iccs.hu Tartalomjegyzék Folyamatirányítás FIR nélkül Nyomdai sajátosságok Megrendelői igények
Szolgáltatásintegráció (VIMIM234) tárgy bevezető
 tárgy bevezető") Szolgáltatásintegráció Szolgáltatásintegráció (VIMIM234) tárgy bevezető Gönczy László gonczy@mit.bme.hu A tárgyról A tantárgy célja a hallgatók megismertetése a komplex informatikai rendszerek integrációs
Szolgáltatásintegráció Szolgáltatásintegráció (VIMIM234) tárgy bevezető Gönczy László gonczy@mit.bme.hu A tárgyról A tantárgy célja a hallgatók megismertetése a komplex informatikai rendszerek integrációs
30 MB INFORMATIKAI PROJEKTELLENŐR
 INFORMATIKAI PROJEKTELLENŐR 30 MB DOMBORA SÁNDOR BEVEZETÉS (INFORMATIKA, INFORMATIAKI FÜGGŐSÉG, INFORMATIKAI PROJEKTEK, MÉRNÖKI ÉS INFORMATIKAI FELADATOK TALÁKOZÁSA, TECHNOLÓGIÁK) 2016. 09. 17. MMK- Informatikai
INFORMATIKAI PROJEKTELLENŐR 30 MB DOMBORA SÁNDOR BEVEZETÉS (INFORMATIKA, INFORMATIAKI FÜGGŐSÉG, INFORMATIKAI PROJEKTEK, MÉRNÖKI ÉS INFORMATIKAI FELADATOK TALÁKOZÁSA, TECHNOLÓGIÁK) 2016. 09. 17. MMK- Informatikai
A GeoEasy telepítése. Tartalomjegyzék. Hardver, szoftver igények. GeoEasy telepítése. GeoEasy V2.05+ Geodéziai Feldolgozó Program
 A GeoEasy telepítése GeoEasy V2.05+ Geodéziai Feldolgozó Program (c)digikom Kft. 1997-2010 Tartalomjegyzék Hardver, szoftver igények GeoEasy telepítése A hardverkulcs Hálózatos hardverkulcs A GeoEasy indítása
A GeoEasy telepítése GeoEasy V2.05+ Geodéziai Feldolgozó Program (c)digikom Kft. 1997-2010 Tartalomjegyzék Hardver, szoftver igények GeoEasy telepítése A hardverkulcs Hálózatos hardverkulcs A GeoEasy indítása
RT-Middleware periféria távérzékelés
 MISKOLCI EGYETEM GÉPÉSZMÉRNÖKI ÉS INFORMATIKAI KAR TUDOMÁNYOS DIÁKKÖRI DOLGOZAT RT-Middleware periféria távérzékelés Tompa Tamás Villamosmérnök MSc szakos hallgató Konzulens: Dr. Kovács Szilveszter egyetemi
MISKOLCI EGYETEM GÉPÉSZMÉRNÖKI ÉS INFORMATIKAI KAR TUDOMÁNYOS DIÁKKÖRI DOLGOZAT RT-Middleware periféria távérzékelés Tompa Tamás Villamosmérnök MSc szakos hallgató Konzulens: Dr. Kovács Szilveszter egyetemi
Mobilplatformok Merre tart a világ? Kis Gergely MattaKis Consulting
 Mobilplatformok Merre tart a világ? Kis Gergely MattaKis Consulting 1 MattaKis Consulting Bemutatkozás Szoftverfejlesztés, informatikai tanácsadás Mobil: Android, BlackBerry (J2ME), iphone Web: JavaEE,
Mobilplatformok Merre tart a világ? Kis Gergely MattaKis Consulting 1 MattaKis Consulting Bemutatkozás Szoftverfejlesztés, informatikai tanácsadás Mobil: Android, BlackBerry (J2ME), iphone Web: JavaEE,
Fejlesztés, működtetés, felügyelet Hatékony infrastruktúra IBM szoftverekkel
 IBM Software Group Fejlesztés, működtetés, felügyelet Hatékony infrastruktúra IBM szoftverekkel Rehus Péter Szoftver üzletág igazgató 2005. február 2. 2003 IBM Corporation On demand igény szerinti működési
IBM Software Group Fejlesztés, működtetés, felügyelet Hatékony infrastruktúra IBM szoftverekkel Rehus Péter Szoftver üzletág igazgató 2005. február 2. 2003 IBM Corporation On demand igény szerinti működési
Városi tömegközlekedés és utastájékoztatás szoftver támogatása
 Városi tömegközlekedés és utastájékoztatás szoftver támogatása 1. Általános célkitűzések: A kisvárosi helyi tömegközlekedés igényeit maximálisan kielégítő hardver és szoftver környezet létrehozása. A struktúra
Városi tömegközlekedés és utastájékoztatás szoftver támogatása 1. Általános célkitűzések: A kisvárosi helyi tömegközlekedés igényeit maximálisan kielégítő hardver és szoftver környezet létrehozása. A struktúra
OpenCL alapú eszközök verifikációja és validációja a gyakorlatban
 OpenCL alapú eszközök verifikációja és validációja a gyakorlatban Fekete Tamás 2015. December 3. Szoftver verifikáció és validáció tantárgy Áttekintés Miért és mennyire fontos a megfelelő validáció és
OpenCL alapú eszközök verifikációja és validációja a gyakorlatban Fekete Tamás 2015. December 3. Szoftver verifikáció és validáció tantárgy Áttekintés Miért és mennyire fontos a megfelelő validáció és
Image Processor BarCode Service. Felhasználói és üzemeltetői kézikönyv
 Image Processor BarCode Service Áttekintés CIP-BarCode alkalmazás a Canon Image Processor programcsomag egyik tagja. A program feladata, hogy sokoldalú eszközt biztosítson képállományok dokumentumkezelési
Image Processor BarCode Service Áttekintés CIP-BarCode alkalmazás a Canon Image Processor programcsomag egyik tagja. A program feladata, hogy sokoldalú eszközt biztosítson képállományok dokumentumkezelési
Grafikus keretrendszer komponensalapú webalkalmazások fejlesztéséhez
 Grafikus keretrendszer komponensalapú webalkalmazások fejlesztéséhez Székely István Debreceni Egyetem, Informatikai Intézet A rendszer felépítése szerver a komponenseket szolgáltatja Java nyelvű implementáció
Grafikus keretrendszer komponensalapú webalkalmazások fejlesztéséhez Székely István Debreceni Egyetem, Informatikai Intézet A rendszer felépítése szerver a komponenseket szolgáltatja Java nyelvű implementáció
Járműinformatika A járműinformatikai fejlesztés
 Járműinformatika A járműinformatikai fejlesztés 2016/2017. tanév, II. félév Dr. Kovács Szilveszter E-mail: szkovacs@iit.uni-miskolc.hu Informatika Intézet 107/a. Tel: (46) 565-111 / 21-07 A járműfejlesztés
Járműinformatika A járműinformatikai fejlesztés 2016/2017. tanév, II. félév Dr. Kovács Szilveszter E-mail: szkovacs@iit.uni-miskolc.hu Informatika Intézet 107/a. Tel: (46) 565-111 / 21-07 A járműfejlesztés
Data Integrátorok a gyakorlatban Oracle DI vs. Pentaho DI Fekszi Csaba Ügyvezető Vinnai Péter Adattárház fejlesztő 2013. február 20.
 Data Integrátorok a gyakorlatban Oracle DI vs. Pentaho DI Fekszi Csaba Ügyvezető Vinnai Péter Adattárház fejlesztő 2013. február 20. 1 2 3 4 5 6 7 8 Pentaho eszköztára Data Integrator Spoon felület Spoon
Data Integrátorok a gyakorlatban Oracle DI vs. Pentaho DI Fekszi Csaba Ügyvezető Vinnai Péter Adattárház fejlesztő 2013. február 20. 1 2 3 4 5 6 7 8 Pentaho eszköztára Data Integrator Spoon felület Spoon
Üzleti folyamatok rugalmasabb IT támogatása. Nick Gábor András 2009. szeptember 10.
 Üzleti folyamatok rugalmasabb IT támogatása Nick Gábor András 2009. szeptember 10. A Generali-Providencia Magyarországon 1831: A Generali Magyarország első biztosítója 1946: Vállalatok államosítása 1989:
Üzleti folyamatok rugalmasabb IT támogatása Nick Gábor András 2009. szeptember 10. A Generali-Providencia Magyarországon 1831: A Generali Magyarország első biztosítója 1946: Vállalatok államosítása 1989:
A J2EE fejlesztési si platform (application. model) 1.4 platform. Ficsor Lajos Általános Informatikai Tanszék Miskolci Egyetem
 1.4 platform. Ficsor Lajos Általános Informatikai Tanszék Miskolci Egyetem") A J2EE fejlesztési si platform (application model) 1.4 platform Ficsor Lajos Általános Informatikai Tanszék Miskolci Egyetem Utolsó módosítás: 2007. 11.13. A J2EE application model A Java szabványok -
A J2EE fejlesztési si platform (application model) 1.4 platform Ficsor Lajos Általános Informatikai Tanszék Miskolci Egyetem Utolsó módosítás: 2007. 11.13. A J2EE application model A Java szabványok -
CRA - Cisco Remote Access
 CRA - Cisco Remote Access Cseh Péter SZTE Szoftverfejlesztés Tanszék A recept Asztali munkaállomások + Soros és hálózati bővítőkártyák + Cisco eszközök + Szabad szoftverek+...fekete mágia + Böngésző =
CRA - Cisco Remote Access Cseh Péter SZTE Szoftverfejlesztés Tanszék A recept Asztali munkaállomások + Soros és hálózati bővítőkártyák + Cisco eszközök + Szabad szoftverek+...fekete mágia + Böngésző =
BME IPAR 4.0 TECHNOLÓGIAI KÖZPONT. Kovács László
 BME IPAR 4.0 TECHNOLÓGIAI KÖZPONT Kovács László RÓLUNK - BME Építőmérnöki Kar (ÉMK) - 1782 Gépészmérnöki Kar (GPK) - 1871 Építészmérnöki Kar (ÉPK) - 1873 Vegyészmérnöki és Biomérnöki Kar (VBK) - 1873 Villamosmérnöki
BME IPAR 4.0 TECHNOLÓGIAI KÖZPONT Kovács László RÓLUNK - BME Építőmérnöki Kar (ÉMK) - 1782 Gépészmérnöki Kar (GPK) - 1871 Építészmérnöki Kar (ÉPK) - 1873 Vegyészmérnöki és Biomérnöki Kar (VBK) - 1873 Villamosmérnöki
SOA modell: Ez az interfész definiálja az elérhető adatokat, és megadja, hogy hogyan lehet azokhoz hozzáférni.
 Service-Oriented Architecture, SOA Az elosztott rendszerek fejlesztésének módja. Célja:az IT eszközök komplexitásának a kezelésének egyszerűsítése könnyebben újrafelhasználhatóság, egymással integrálhatóság
Service-Oriented Architecture, SOA Az elosztott rendszerek fejlesztésének módja. Célja:az IT eszközök komplexitásának a kezelésének egyszerűsítése könnyebben újrafelhasználhatóság, egymással integrálhatóság
A GeoEasy telepítése. Tartalomjegyzék. Hardver, szoftver igények. GeoEasy telepítése. GeoEasy V2.05 Geodéziai Feldolgozó Program
 A GeoEasy telepítése GeoEasy V2.05 Geodéziai Feldolgozó Program (c)digikom Kft. 1997-2008 Tartalomjegyzék Hardver, szoftver igények GeoEasy telepítése A hardverkulcs Hálózatos hardverkulcs A GeoEasy indítása
A GeoEasy telepítése GeoEasy V2.05 Geodéziai Feldolgozó Program (c)digikom Kft. 1997-2008 Tartalomjegyzék Hardver, szoftver igények GeoEasy telepítése A hardverkulcs Hálózatos hardverkulcs A GeoEasy indítása
SZENZORFÚZIÓS ELJÁRÁSOK KIDOLGOZÁSA AUTONÓM JÁRMŰVEK PÁLYAKÖVETÉSÉRE ÉS IRÁNYÍTÁSÁRA
 infokommunikációs technológiák SZENZORFÚZIÓS ELJÁRÁSOK KIDOLGOZÁSA AUTONÓM JÁRMŰVEK PÁLYAKÖVETÉSÉRE ÉS IRÁNYÍTÁSÁRA BEVEZETŐ A KUTATÁS CÉLJA Autonóm járművek és robotok esetén elsődleges feladat a robotok
infokommunikációs technológiák SZENZORFÚZIÓS ELJÁRÁSOK KIDOLGOZÁSA AUTONÓM JÁRMŰVEK PÁLYAKÖVETÉSÉRE ÉS IRÁNYÍTÁSÁRA BEVEZETŐ A KUTATÁS CÉLJA Autonóm járművek és robotok esetén elsődleges feladat a robotok
Mi legyen az informatika tantárgyban?
 Mi legyen az informatika tantárgyban? oktatás fő területei: digitális írástudás; számítástudomány; információs technológiák. Digitális írástudás szövegszerkesztés, adat vizualizáció, prezentáció, zeneszerkesztés,
Mi legyen az informatika tantárgyban? oktatás fő területei: digitális írástudás; számítástudomány; információs technológiák. Digitális írástudás szövegszerkesztés, adat vizualizáció, prezentáció, zeneszerkesztés,
Flex: csak rugalmasan!
 Flex: csak rugalmasan! Kiss-Tóth Marcell http://kiss-toth.hu marcell@kiss-toth.hu Magyarországi Web Konferencia 2006 2006. március 18. tartalom bevezető Adobe Flex alternatív technológiák bevezető az Internetnek
Flex: csak rugalmasan! Kiss-Tóth Marcell http://kiss-toth.hu marcell@kiss-toth.hu Magyarországi Web Konferencia 2006 2006. március 18. tartalom bevezető Adobe Flex alternatív technológiák bevezető az Internetnek
Crossplatform mobil fejlesztőkörnyezet kiválasztását támogató kutatás
 Crossplatform mobil fejlesztőkörnyezet kiválasztását támogató kutatás A Mobil multimédiás kliens fejlesztői eszközkészlet létrehozása című kutatás-fejlesztési projekthez A dokumentum célja A dokumentum
Crossplatform mobil fejlesztőkörnyezet kiválasztását támogató kutatás A Mobil multimédiás kliens fejlesztői eszközkészlet létrehozása című kutatás-fejlesztési projekthez A dokumentum célja A dokumentum
Osztott alkalmazások fejlesztési technológiái Áttekintés
 Osztott alkalmazások fejlesztési technológiái Áttekintés Ficsor Lajos Általános Informatikai Tanszék Miskolci Egyetem Történelem - a kezdetek 2 Mainframe-ek és terminálok Minden a központi gépen fut A
Osztott alkalmazások fejlesztési technológiái Áttekintés Ficsor Lajos Általános Informatikai Tanszék Miskolci Egyetem Történelem - a kezdetek 2 Mainframe-ek és terminálok Minden a központi gépen fut A
Ficsor Lajos Általános Informatikai Tanszék Miskolci Egyetem
 A Java EE 5 platform Ficsor Lajos Általános Informatikai Tanszék Miskolci Egyetem Utolsó módosítás: 2008. 04. 17. A Java EE 5 platform A Java EE 5 plattform A J2EE 1.4 után következő verzió. Alapvető továbbfejlesztési
A Java EE 5 platform Ficsor Lajos Általános Informatikai Tanszék Miskolci Egyetem Utolsó módosítás: 2008. 04. 17. A Java EE 5 platform A Java EE 5 plattform A J2EE 1.4 után következő verzió. Alapvető továbbfejlesztési
A felhőről általában. Kacsuk Péter MTA SZTAKI
 A felhőről általában Kacsuk Péter MTA SZTAKI Miért fontos a felhő? (I) Problémák, ha az infrastruktúra még nem létezik Az ötletek megvalósításához szükséges idő Kutatás a felhők előtt 1. Van egy jó ötlet
A felhőről általában Kacsuk Péter MTA SZTAKI Miért fontos a felhő? (I) Problémák, ha az infrastruktúra még nem létezik Az ötletek megvalósításához szükséges idő Kutatás a felhők előtt 1. Van egy jó ötlet
ARM Cortex magú mikrovezérlők. mbed
 ARM Cortex magú mikrovezérlők mbed Scherer Balázs Budapest University of Technology and Economics Department of Measurement and Information Systems BME-MIT 2016 MBED webes fejlesztőkörnyezet 2009-ben megjelent
ARM Cortex magú mikrovezérlők mbed Scherer Balázs Budapest University of Technology and Economics Department of Measurement and Information Systems BME-MIT 2016 MBED webes fejlesztőkörnyezet 2009-ben megjelent
VIRTUALIZÁCIÓ KÉSZÍTETTE: NAGY ZOLTÁN MÁRK EHA: NAZKABF.SZE I. ÉVES PROGRAMTERVEZŐ-INFORMATIKUS, BSC
 VIRTUALIZÁCIÓ KÉSZÍTETTE: NAGY ZOLTÁN MÁRK EHA: NAZKABF.SZE I. ÉVES PROGRAMTERVEZŐ-INFORMATIKUS, BSC A man should look for what is, and not for what he thinks should be. Albert Einstein A számítógépek
VIRTUALIZÁCIÓ KÉSZÍTETTE: NAGY ZOLTÁN MÁRK EHA: NAZKABF.SZE I. ÉVES PROGRAMTERVEZŐ-INFORMATIKUS, BSC A man should look for what is, and not for what he thinks should be. Albert Einstein A számítógépek
Magyarországi partner: S&T Consulting Hungary Kft.
 Magyarországi partner: S&T Consulting Hungary Kft. TERMÉK-TÖRTÉNET > 1999 2003 2005 2016 NEXT Visual Components is founded KUKA Sim Layout 3D Product Family Visual Components 4.0 E S S E N T I A L S P
Magyarországi partner: S&T Consulting Hungary Kft. TERMÉK-TÖRTÉNET > 1999 2003 2005 2016 NEXT Visual Components is founded KUKA Sim Layout 3D Product Family Visual Components 4.0 E S S E N T I A L S P
Labor 2 Mikrovezérlők
 Labor 2 Mikrovezérlők ATMEL AVR - ARDUINO BUDAI TAMÁS 2015. 09. 06. Tartalom Mikrovezérlők Mikrovezérlők felépítése, működése Mikrovezérlő típusok, gyártók Mikrovezérlők perifériái Mikrovezérlők programozása
Labor 2 Mikrovezérlők ATMEL AVR - ARDUINO BUDAI TAMÁS 2015. 09. 06. Tartalom Mikrovezérlők Mikrovezérlők felépítése, működése Mikrovezérlő típusok, gyártók Mikrovezérlők perifériái Mikrovezérlők programozása
Projekt beszámoló. Könyvelési Szakértői Rendszer Kifejlesztése Repetitív Könyvelési Feladatok Szabályalapú Feldolgozására
 Projekt beszámoló Projekt azonosítója: Projektgazda neve: Projekt címe: DAOP-1.3.1-12-2012-0081 Számviteli Innovációs Iroda Kft. Könyvelési Szakértői Rendszer Kifejlesztése Repetitív Könyvelési Feladatok
Projekt beszámoló Projekt azonosítója: Projektgazda neve: Projekt címe: DAOP-1.3.1-12-2012-0081 Számviteli Innovációs Iroda Kft. Könyvelési Szakértői Rendszer Kifejlesztése Repetitív Könyvelési Feladatok
A mesterséges intelligencia alkalmazásának egyik legfontosabb és leglátványosabb területe
 Robotika A mesterséges intelligencia alkalmazásának egyik legfontosabb és leglátványosabb területe Werner Ágnes Bevezetés Maga a robot szó 1921-ben CARELC CAPEK Rossum Univerzális Robotjai című színdarabjában
Robotika A mesterséges intelligencia alkalmazásának egyik legfontosabb és leglátványosabb területe Werner Ágnes Bevezetés Maga a robot szó 1921-ben CARELC CAPEK Rossum Univerzális Robotjai című színdarabjában
Rubin SPIRIT TEST. Rubin firmware-ek és hardverek tesztelése esettanulmány V1.0. Készítette: Hajnali Krisztián Jóváhagyta: Varga József
 Rubin firmware-ek és hardverek tesztelése esettanulmány V1.0 Készítette: Hajnali Krisztián Jóváhagyta: Varga József Rubin Informatikai Zrt. 1149 Budapest, Egressy út 17-21. telefon: +361 469 4020; fax:
Rubin firmware-ek és hardverek tesztelése esettanulmány V1.0 Készítette: Hajnali Krisztián Jóváhagyta: Varga József Rubin Informatikai Zrt. 1149 Budapest, Egressy út 17-21. telefon: +361 469 4020; fax:
Firmware fejlesztés. Mártonfalvi Zsolt Hardware programozó
 Firmware fejlesztés Mártonfalvi Zsolt Hardware programozó Áttekintés Beágyazott rendszer A fejlesztés menete Milyen eszközökkel? Beágyazott rendszer Egy beágyazott rendszer (angolul: embedded system) olyan
Firmware fejlesztés Mártonfalvi Zsolt Hardware programozó Áttekintés Beágyazott rendszer A fejlesztés menete Milyen eszközökkel? Beágyazott rendszer Egy beágyazott rendszer (angolul: embedded system) olyan
 1. Az Android platform bemutatása (Ekler Péter)... 1 1.1. Az Android sikerességének okai... 1 1.2. Az Android platform története... 3 1.3. Android-verziók... 5 1.4. Android Market (Google Play)... 13 1.5.
1. Az Android platform bemutatása (Ekler Péter)... 1 1.1. Az Android sikerességének okai... 1 1.2. Az Android platform története... 3 1.3. Android-verziók... 5 1.4. Android Market (Google Play)... 13 1.5.
Orvosi készülékekben használható modern fejlesztési technológiák lehetőségeinek vizsgálata
 Kutatási beszámoló a Pro Progressio Alapítvány számára Budapesti Műszaki és Gazdaságtudományi Egyetem Villamosmérnöki és Informatikai Kar Mérnök informatika szak Orvosi készülékekben használható modern
Kutatási beszámoló a Pro Progressio Alapítvány számára Budapesti Műszaki és Gazdaságtudományi Egyetem Villamosmérnöki és Informatikai Kar Mérnök informatika szak Orvosi készülékekben használható modern
Komponens alapú programozás Bevezetés
 Komponens alapú programozás Bevezetés Ficsor Lajos Miskolci Egyetem Általános Informatikai Tanszék Ez a tananyag felhasználja a TEMPUS S_JEP-12495-97 Network Computing Chapter 8 Developing of Network Computing
Komponens alapú programozás Bevezetés Ficsor Lajos Miskolci Egyetem Általános Informatikai Tanszék Ez a tananyag felhasználja a TEMPUS S_JEP-12495-97 Network Computing Chapter 8 Developing of Network Computing
Csoportos üzenetszórás optimalizálása klaszter rendszerekben
 Csoportos üzenetszórás optimalizálása klaszter rendszerekben Készítette: Juhász Sándor Csikvári András Budapesti Műszaki és Gazdaságtudományi Egyetem Villamosmérnöki és Informatikai Kar Automatizálási
Csoportos üzenetszórás optimalizálása klaszter rendszerekben Készítette: Juhász Sándor Csikvári András Budapesti Műszaki és Gazdaságtudományi Egyetem Villamosmérnöki és Informatikai Kar Automatizálási
alkalmazásfejlesztő környezete
 A HunGrid infrastruktúra és alkalmazásfejlesztő környezete Gergely Sipos sipos@sztaki.hu MTA SZTAKI Hungarian Academy of Sciences www.lpds.sztaki.hu www.eu-egee.org egee EGEE-II INFSO-RI-031688 Tartalom
A HunGrid infrastruktúra és alkalmazásfejlesztő környezete Gergely Sipos sipos@sztaki.hu MTA SZTAKI Hungarian Academy of Sciences www.lpds.sztaki.hu www.eu-egee.org egee EGEE-II INFSO-RI-031688 Tartalom
Ismerkedés a Python programnyelvvel. és annak micropython változatával
 Ismerkedés a Python programnyelvvel és annak micropython változatával A Python programozási nyelv története Az alapötlet 1980-ban született, 1989 decemberében kezdte el fejleszteni Guido van Rossum a CWI-n
Ismerkedés a Python programnyelvvel és annak micropython változatával A Python programozási nyelv története Az alapötlet 1980-ban született, 1989 decemberében kezdte el fejleszteni Guido van Rossum a CWI-n
A Java EE 5 plattform
 A Java EE 5 platform Ficsor Lajos Általános Informatikai Tanszék Miskolci Egyetem Utolsó módosítás: 2007. 11. 13. A Java EE 5 platform A Java EE 5 plattform A J2EE 1.4 után következő verzió. Alapvető továbbfejlesztési
A Java EE 5 platform Ficsor Lajos Általános Informatikai Tanszék Miskolci Egyetem Utolsó módosítás: 2007. 11. 13. A Java EE 5 platform A Java EE 5 plattform A J2EE 1.4 után következő verzió. Alapvető továbbfejlesztési
Podoski Péter és Zabb László
 Podoski Péter és Zabb László Bevezető Algoritmus-vizualizáció témakörében végeztünk kutatásokat és fejlesztéseket Felmértük a manapság ismert eszközök előnyeit és hiányosságait Kidolgoztunk egy saját megjelenítő
Podoski Péter és Zabb László Bevezető Algoritmus-vizualizáció témakörében végeztünk kutatásokat és fejlesztéseket Felmértük a manapság ismert eszközök előnyeit és hiányosságait Kidolgoztunk egy saját megjelenítő
Feltörekvő technológiák: seam, drools, richfaces és társai a JBossban
 Feltörekvő technológiák: seam, drools, richfaces és társai a JBossban Török Tamás senior consultant ULX Nyílt Forráskódú Tanácsadó és Disztribúciós Kft. Miről lesz ma szó? Röviden az ULX-ről A JBoss közösségről
Feltörekvő technológiák: seam, drools, richfaces és társai a JBossban Török Tamás senior consultant ULX Nyílt Forráskódú Tanácsadó és Disztribúciós Kft. Miről lesz ma szó? Röviden az ULX-ről A JBoss közösségről
Prolan Zrt. fejlesztéseiben. Petri Dániel
 Az szabvány alkalmazása a Prolan Zrt. fejlesztéseiben Petri Dániel dpetri@prolan.hu PROLAN Irányítástechnikai Zrt. Áttekintés 61850 szabvánnyal kapcsolatos fejlesztéseink ProField IED mezőgép Új alállomási
Az szabvány alkalmazása a Prolan Zrt. fejlesztéseiben Petri Dániel dpetri@prolan.hu PROLAN Irányítástechnikai Zrt. Áttekintés 61850 szabvánnyal kapcsolatos fejlesztéseink ProField IED mezőgép Új alállomási
BIG DATA ÉS GÉPI TANULÁS KÖRNYEZET AZ MTA CLOUD-ON KACSUK PÉTER, NAGY ENIKŐ, PINTYE ISTVÁN, HAJNAL ÁKOS, LOVAS RÓBERT
 BIG DATA ÉS GÉPI TANULÁS KÖRNYEZET AZ MTA CLOUD-ON KACSUK PÉTER, NAGY ENIKŐ, PINTYE ISTVÁN, HAJNAL ÁKOS, LOVAS RÓBERT TARTALOM MTA Cloud Big Data és gépi tanulást támogató szoftver eszközök Apache Spark
BIG DATA ÉS GÉPI TANULÁS KÖRNYEZET AZ MTA CLOUD-ON KACSUK PÉTER, NAGY ENIKŐ, PINTYE ISTVÁN, HAJNAL ÁKOS, LOVAS RÓBERT TARTALOM MTA Cloud Big Data és gépi tanulást támogató szoftver eszközök Apache Spark
Bánfalvy Zoltán, ABB Kft., Védelmi és Irányítástechnikai Fórum, Siófok, IEC irányítástechnikai workshop Alállomási IEC 61850
 Bánfalvy Zoltán, ABB Kft., Védelmi és Irányítástechnikai Fórum, Siófok, 2015.06.03-04. IEC 61850 irányítástechnikai workshop Alállomási IEC 61850 kommunikáció diagnosztikája, RTU HMI / MicroSCADA Tartalom
Bánfalvy Zoltán, ABB Kft., Védelmi és Irányítástechnikai Fórum, Siófok, 2015.06.03-04. IEC 61850 irányítástechnikai workshop Alállomási IEC 61850 kommunikáció diagnosztikája, RTU HMI / MicroSCADA Tartalom
1. Mi az hogy intelligens robot rendszer? 1. Autonóm cselekvő. 2. Hogyan épül fel egy intelligens alkalmazás?
 Intelligens robot rendszerek Dr. Szemes Péter Tamás Villamosmérnöki és Mechatronikai Tanszék Műszaki Kar Debreceni Egyetem 1. Mi az hogy intelligens robot rendszer? 1. Autonóm cselekvő 2. Hogyan épül fel
Intelligens robot rendszerek Dr. Szemes Péter Tamás Villamosmérnöki és Mechatronikai Tanszék Műszaki Kar Debreceni Egyetem 1. Mi az hogy intelligens robot rendszer? 1. Autonóm cselekvő 2. Hogyan épül fel
Intelligens robot rendszerek Dr. Szemes Péter Tamás Villamosmérnöki és Mechatronikai Tanszék Műszaki Kar Debreceni Egyetem
 Intelligens robot rendszerek Dr. Szemes Péter Tamás Villamosmérnöki és Mechatronikai Tanszék Műszaki Kar Debreceni Egyetem Liszenc: CC-BY-NC-3.0 ( Nevezd meg Ne add el! ) 2012.05.09. v. 1.0 1. Mi az hogy
Intelligens robot rendszerek Dr. Szemes Péter Tamás Villamosmérnöki és Mechatronikai Tanszék Műszaki Kar Debreceni Egyetem Liszenc: CC-BY-NC-3.0 ( Nevezd meg Ne add el! ) 2012.05.09. v. 1.0 1. Mi az hogy
Everything Over Ethernet
 Everything Over Ethernet Következő Generációs Adatközpontok felépítése Lenkei Árpád Arpad.Lenkei@snt.hu 2009. November 12. www.snt-world.com 0 0 Tartalom Adatközpont 3.0 Migráció fázisai, kihívások Építőelemek
Everything Over Ethernet Következő Generációs Adatközpontok felépítése Lenkei Árpád Arpad.Lenkei@snt.hu 2009. November 12. www.snt-world.com 0 0 Tartalom Adatközpont 3.0 Migráció fázisai, kihívások Építőelemek
E-learning tananyagfejlesztő képzés tematika oktatott modulok
 E-learning tananyagfejlesztő képzés tematika oktatott modulok 1142-06 - Számítógépkezelés, szoftverhasználat, munkaszervezés o Hardvert üzemeltet, szoftvert telepít o Irodai programcsomagot egyedi és integrált
E-learning tananyagfejlesztő képzés tematika oktatott modulok 1142-06 - Számítógépkezelés, szoftverhasználat, munkaszervezés o Hardvert üzemeltet, szoftvert telepít o Irodai programcsomagot egyedi és integrált
Modell alapú tesztelés mobil környezetben
 Modell alapú tesztelés mobil környezetben Micskei Zoltán Budapesti Műszaki és Gazdaságtudományi Egyetem Méréstechnika és Információs Rendszerek Tanszék A terület behatárolása Testing is an activity performed
Modell alapú tesztelés mobil környezetben Micskei Zoltán Budapesti Műszaki és Gazdaságtudományi Egyetem Méréstechnika és Információs Rendszerek Tanszék A terület behatárolása Testing is an activity performed
UNIX / Linux rendszeradminisztráció
 UNIX / Linux rendszeradminisztráció VIII. előadás Miskolci Egyetem Informatikai és Villamosmérnöki Tanszékcsoport Általános Informatikai Tanszék Virtualizáció Mi az a virtualizáció? Nagyvonalúan: számítógép
UNIX / Linux rendszeradminisztráció VIII. előadás Miskolci Egyetem Informatikai és Villamosmérnöki Tanszékcsoport Általános Informatikai Tanszék Virtualizáció Mi az a virtualizáció? Nagyvonalúan: számítógép
Laboratóriumi műszerek megvalósítása ARM alapú mikrovezérlővel és Linux-szal
 Laboratóriumi műszerek megvalósítása ARM alapú mikrovezérlővel és Linux-szal Fuszenecker Róbert Budapesti Műszaki Főiskola Kandó Kálmán Műszaki Főiskolai Kar 2007. október 17. Laboratóriumi berendezések
Laboratóriumi műszerek megvalósítása ARM alapú mikrovezérlővel és Linux-szal Fuszenecker Róbert Budapesti Műszaki Főiskola Kandó Kálmán Műszaki Főiskolai Kar 2007. október 17. Laboratóriumi berendezések
ProofIT Informatikai Kft. 1115 Budapest, Petzvál J. 4/a www.proofit.hu
 Verzióváltások az üzleti folytonosság fenntartásával a MOL kiskereskedelmi rendszerében Fehér Lajos ProofIT Kft. Hogyan keletkezett a HBO a MOL alapvetései miért egyedi fejlesztés? Sajátos igényeknek megfelelő
Verzióváltások az üzleti folytonosság fenntartásával a MOL kiskereskedelmi rendszerében Fehér Lajos ProofIT Kft. Hogyan keletkezett a HBO a MOL alapvetései miért egyedi fejlesztés? Sajátos igényeknek megfelelő
Autóipari beágyazott rendszerek. Integrált és szétcsatolt rendszerek
 Autóipari beágyazott rendszerek Integrált és szétcsatolt rendszerek 1 Integrált és szétcsatolt rendszerek Szétcsatolt rendszer 1:1 hozzárendelés ECUk és funkciók között Minden funkció külön egységen van
Autóipari beágyazott rendszerek Integrált és szétcsatolt rendszerek 1 Integrált és szétcsatolt rendszerek Szétcsatolt rendszer 1:1 hozzárendelés ECUk és funkciók között Minden funkció külön egységen van
Új kompakt X20 vezérlő integrált I/O pontokkal
 Új kompakt X20 vezérlő integrált I/O pontokkal Integrált flash 4GB belső 16 kb nem felejtő RAM B&R tovább bővíti a nagy sikerű X20 vezérlő családot, egy kompakt vezérlővel, mely integrált be és kimeneti
Új kompakt X20 vezérlő integrált I/O pontokkal Integrált flash 4GB belső 16 kb nem felejtő RAM B&R tovább bővíti a nagy sikerű X20 vezérlő családot, egy kompakt vezérlővel, mely integrált be és kimeneti
Tartalom Platform-független modellezés Alkalmazás-modellezés A DECOS hardver platform Platform modellezés Hardver-szoftver integráció Implementáció 2
 Biztonság-vezérelt automatikus architektúra szintézis Balogh András abalogh@mit.bme.hu Tartalom Platform-független modellezés Alkalmazás-modellezés A DECOS hardver platform Platform modellezés Hardver-szoftver
Biztonság-vezérelt automatikus architektúra szintézis Balogh András abalogh@mit.bme.hu Tartalom Platform-független modellezés Alkalmazás-modellezés A DECOS hardver platform Platform modellezés Hardver-szoftver
Mire nem jó egy telefon!
 Mire nem jó egy telefon! Ekler Péter Budapesti Műszaki és Gazdaságtudományi Egyetem Automatizálási és Alkalmazott Informatikai Tanszék NJSZT Szoftvertechnológiai Fórum 2009. március 30. Tartalom Bevezetés
Mire nem jó egy telefon! Ekler Péter Budapesti Műszaki és Gazdaságtudományi Egyetem Automatizálási és Alkalmazott Informatikai Tanszék NJSZT Szoftvertechnológiai Fórum 2009. március 30. Tartalom Bevezetés
OPERÁCIÓS RENDSZEREK I. BEVEZETÉS Koczka Ferenc -
 OPERÁCIÓS RENDSZEREK I. BEVEZETÉS Koczka Ferenc - koczka.ferenc@ektf.hu KÖVETELMÉNYEK GYAKORLATI JEGY: Két zárthelyi dolgozat eredményes megírása. Forrás: http://wiki.koczka.hu ELMÉLETI VIZSGA Az előadások
OPERÁCIÓS RENDSZEREK I. BEVEZETÉS Koczka Ferenc - koczka.ferenc@ektf.hu KÖVETELMÉNYEK GYAKORLATI JEGY: Két zárthelyi dolgozat eredményes megírása. Forrás: http://wiki.koczka.hu ELMÉLETI VIZSGA Az előadások
A ROBOTIKA ALKALMAZÁSÁNAK LEHETŐSÉGEI A HAD- ÉS BIZTONSÁGTECHNIKAI MÉRNÖK KÉPZÉSBEN
 IV. Évfolyam 1. szám - 2009. március Tibenszkyné Fórika Krisztina Zrínyi Miklós Nemzetvédelmi Egyetem tibenszkyne.forika.krisztina@zmne.hu A ROBOTIKA ALKALMAZÁSÁNAK LEHETŐSÉGEI A HAD- ÉS BIZTONSÁGTECHNIKAI
IV. Évfolyam 1. szám - 2009. március Tibenszkyné Fórika Krisztina Zrínyi Miklós Nemzetvédelmi Egyetem tibenszkyne.forika.krisztina@zmne.hu A ROBOTIKA ALKALMAZÁSÁNAK LEHETŐSÉGEI A HAD- ÉS BIZTONSÁGTECHNIKAI
Intelligens biztonsági megoldások. Távfelügyelet
 Intelligens biztonsági megoldások A riasztást fogadó távfelügyeleti központok felelősek a felügyelt helyszínekről érkező információ hatékony feldolgozásáért, és a bejövő eseményekhez tartozó azonnali intézkedésekért.
Intelligens biztonsági megoldások A riasztást fogadó távfelügyeleti központok felelősek a felügyelt helyszínekről érkező információ hatékony feldolgozásáért, és a bejövő eseményekhez tartozó azonnali intézkedésekért.
S01-7 Komponens alapú szoftverfejlesztés 1
 S01-7 Komponens alapú szoftverfejlesztés 1 1. A szoftverfejlesztési modell fogalma. 2. A komponens és komponens modell fogalma. 3. UML kompozíciós diagram fogalma. 4. A szoftverarchitektúrák fogalma, összetevői.
S01-7 Komponens alapú szoftverfejlesztés 1 1. A szoftverfejlesztési modell fogalma. 2. A komponens és komponens modell fogalma. 3. UML kompozíciós diagram fogalma. 4. A szoftverarchitektúrák fogalma, összetevői.
WDS 4510 adatátviteli adó-vevő
 WDS 4510 adatátviteli adó-vevő A WDS-4510 készülék pont-pont és pont-több pont adatátviteli alkalmazásokra kifejlesztett digitális rádió adó-vevő. DSP technológiai bázison kifejlesztett, igen gyors adás-vétel
WDS 4510 adatátviteli adó-vevő A WDS-4510 készülék pont-pont és pont-több pont adatátviteli alkalmazásokra kifejlesztett digitális rádió adó-vevő. DSP technológiai bázison kifejlesztett, igen gyors adás-vétel
Alkalmazások típusai Szoftverismeretek
 Alkalmazások típusai Szoftverismeretek Prezentáció tartalma Szoftverek csoportjai Operációs rendszerek Partíciók, fájlrendszerek Tömörítés Vírusok Adatvédelem 2 A szoftver fogalma A szoftver teszi használhatóvá
Alkalmazások típusai Szoftverismeretek Prezentáció tartalma Szoftverek csoportjai Operációs rendszerek Partíciók, fájlrendszerek Tömörítés Vírusok Adatvédelem 2 A szoftver fogalma A szoftver teszi használhatóvá
IV.4. FELHŐ ALAPÚ BIZTONSÁGOS ADATTÁROLÁSI MÓDSZER ÉS TESZTKÖRNYEZET KIDOLGOZÁSA
 infokommunikációs technológiák IV.4. FELHŐ ALAPÚ BIZTONSÁGOS ADATTÁROLÁSI MÓDSZER ÉS TESZTKÖRNYEZET KIDOLGOZÁSA BEVEZETÉS Mit jelent, hogy működik a felhő alapú adattárolás? Az adatainkat interneten elérhető
infokommunikációs technológiák IV.4. FELHŐ ALAPÚ BIZTONSÁGOS ADATTÁROLÁSI MÓDSZER ÉS TESZTKÖRNYEZET KIDOLGOZÁSA BEVEZETÉS Mit jelent, hogy működik a felhő alapú adattárolás? Az adatainkat interneten elérhető
ROBOT IRÁNYÍTÁS INFRAVÖRÖS LED TÖMBBEL
 TÁMOP-4.2.2.C-11/1/KONV-212-4 infokommunikációs technológiák ROBOT IRÁNYÍTÁS INFRAVÖRÖS LED TÖMBBEL A KUTATÁSI TERÜLET RÖVID MEGFOGALMAZÁSA TÁMOP-4.2.2.C-11/1/KONV-212-4 Célok: Növekvő érdeklődés a non-boolean
TÁMOP-4.2.2.C-11/1/KONV-212-4 infokommunikációs technológiák ROBOT IRÁNYÍTÁS INFRAVÖRÖS LED TÖMBBEL A KUTATÁSI TERÜLET RÖVID MEGFOGALMAZÁSA TÁMOP-4.2.2.C-11/1/KONV-212-4 Célok: Növekvő érdeklődés a non-boolean
Microsoft SQL Server telepítése
 Microsoft SQL Server telepítése Az SQL Server a Microsoft adatbázis kiszolgáló megoldása Windows operációs rendszerekre. Az SQL Server 1.0 verziója 1989-ben jelent meg, amelyet tizenegy további verzió
Microsoft SQL Server telepítése Az SQL Server a Microsoft adatbázis kiszolgáló megoldása Windows operációs rendszerekre. Az SQL Server 1.0 verziója 1989-ben jelent meg, amelyet tizenegy további verzió
MTA SZTAKI HBIT szakmai gyakorlatok 2014 nyár
 Jelentkezés, kapcsolat MTA SZTAKI HBIT szakmai gyakorlatok 2014 nyár Tartalomjegyzék Jelentkezés, kapcsolat...1 Webes fejlesztési feladatok...2 WiFi eszközregisztrációs weblap kialakítása...2 Kiterjesztés
Jelentkezés, kapcsolat MTA SZTAKI HBIT szakmai gyakorlatok 2014 nyár Tartalomjegyzék Jelentkezés, kapcsolat...1 Webes fejlesztési feladatok...2 WiFi eszközregisztrációs weblap kialakítása...2 Kiterjesztés
SZOFTVERES SZEMLÉLTETÉS A MESTERSÉGES INTELLIGENCIA OKTATÁSÁBAN _ Jeszenszky Péter Debreceni Egyetem, Informatikai Kar jeszenszky.peter@inf.unideb.
 SZOFTVERES SZEMLÉLTETÉS A MESTERSÉGES INTELLIGENCIA OKTATÁSÁBAN _ Jeszenszky Péter Debreceni Egyetem, Informatikai Kar jeszenszky.peter@inf.unideb.hu Mesterséges intelligencia oktatás a DE Informatikai
SZOFTVERES SZEMLÉLTETÉS A MESTERSÉGES INTELLIGENCIA OKTATÁSÁBAN _ Jeszenszky Péter Debreceni Egyetem, Informatikai Kar jeszenszky.peter@inf.unideb.hu Mesterséges intelligencia oktatás a DE Informatikai
Témakiírások 2014/15. őszi félévben
 Témakiírások 2014/15. őszi félévben Témavezető: Dr. Vörösházi Zsolt voroshazi@vision.vein.hu voroshazi.zsolt@virt.uni-pannon.hu Veszprém, 2014. szeptember 9. Témaismertetés #1 National Instruments - LabView
Témakiírások 2014/15. őszi félévben Témavezető: Dr. Vörösházi Zsolt voroshazi@vision.vein.hu voroshazi.zsolt@virt.uni-pannon.hu Veszprém, 2014. szeptember 9. Témaismertetés #1 National Instruments - LabView
Mezőgazdasági robot fejlesztése és jövőbeli bővíthetősége
 Mezőgazdasági robot fejlesztése és jövőbeli bővíthetősége Tóth Mihály Informatikus és szakigazgatási agrármérnök (BSc) Konzulens: Dr. Szilágyi Róbert 2014.11.14. Az informatika, mint segítő ágazat Az informatika
Mezőgazdasági robot fejlesztése és jövőbeli bővíthetősége Tóth Mihály Informatikus és szakigazgatási agrármérnök (BSc) Konzulens: Dr. Szilágyi Róbert 2014.11.14. Az informatika, mint segítő ágazat Az informatika