LirKom II. 4. ea. Jó reggelt, kollégák!
|
|
|
- Árpád Székely
- 8 évvel ezelőtt
- Látták:
Átírás

1 LirKom II. 4. ea. Jó reggelt, kollégák!
2 Global Positioning System (GPS) és az Augmentation rendszerek

3 A GNSS világa ma
4 Positioning, Navigation, and Timing (PNT)
5 Bevezető Néhány évtized alatt a GPS globális eszközzé vált Űr-alapú (space-based) helyzetmeghatározás Navigáció és PNT Időmérési eszköz Konzisztens, jól előrelátható, megbízható politika és teljesítmény mellett A kibővítés (augmentation) még jobban növeli a teljesítőképességet Az Internethez hasonlóan a GPS is a globális információs infrastruktúra összetevő elemévé vált A méretezhető alkalmazásokon keresztül rendkívül széles képességekkel bíró, új lehetőségeket teremt Elősegíti a hatékonyságot a (repülés)biztonság, a környezetvédelem és a tudományok innovációs tevékenysége fejlesztésével 5
6 A jelen anyagban: Amikor a jel (signal) szót használjuk, mindig a kisugárzott információ-csomagot kell érteni alatta A teljesítmény = performance értelemben használt AUGMENTATION = kibővítés

7 Nap-nap után új és új alkalmazások jelennek meg Wireless és mobil alkalmazások Gyermek/kisállat/autó követése Automatikus hótakarítés szervezés Űrhajók vezérlése Erőművek vezérlési hálózat menedzselése Földfelszíni bányászat 7
8 A GPS, mint globális nyilvános szolgáltatás (- USA: Global Public Service) A GPS globális nyilvános szolgáltatásként 1993 óta folyamatosan teljesíti a vele szemben támasztott teljesítmény-követelményeket (sőt messze meghaladja azokat; (SPS Performance Standard ) A polgári célú GPS szolgáltatás mentes a közvetlen használati díjaktól (free of direct user charges) 8 Ehhez hasonlóan a kibővítés (augmentataion) szolgáltatásai is azok (az USA kormánya birtokában lévőké, pl. NDGPS, WAAS, etc.) A nyilvános felhasználás jogi dokumentumában: A felhasználók és az iparágak számára szabad és egyenlő rendelkezésre állás A felhasználói végberendezések fejlesztésének lehetősége mindenki számára egyenlően nyitott, és a világpiaci versenyhelyzetet kívánja A GPS tulajdonosa és üzembentartója az USA kormánya A kormány nevében beszerzi és üzemelteti az USAF Belső (USA) nemzeti szinten több felhasználós tulajdonként van nyilvántartva
9 Továbblépés: kétoldalú GPS együttműködések USA - Japan: Politikai és műszaki konzultációk a GPS együttműködésről 1996-tól A QZSS rendszer kibővítés a GPS-szel való kompatibilitás USA - EU GPS-Galileo Együttműködési Megállapodás 2004-tól 2007 júliusában egyezmény a továbbfejlesztett polgári jelrendszerről (MBOC) USA - India: Politikai és műszaki konzultációk a GPS együttműködésről 2005-től Az ionoszférikus torzulásokról/megoldásokról kutatások folytatása Közös állásfoglalás a GNSS együttműködésről, 2007 február USA Russia: tárgyalások a GPS-GLONASS Együttműködési Megállapodásról 2005-től A nagyobb együttműködési képességű (interoperability) polgári GPS- GLONASS jelrendszerekről folytatott megbeszélések USA - Australia: az Egyesített Delegációs Állásfoglalás a Polgári GPS együttműködésről, aláírva 2007 áprilisában A GPS műholdak üzemi/üzemeltetési változásairól szóló értesítések továbbfejlesztett mechanizmusának kidolgozásáról
10 Maga a Global Positioning System (GPS)
 Precíziós (USA és szövetségesei MIL) Három szegmens: ŰR- FÖLDI")
11 A Global Positioning System 24 működő műholdból álló rendszer, közepes földkörüli pályán (MEO) Globális fedésterület, H24-ben, minden időjárási körülmények között A műholdak a precíz időt és a röppálya információkat az L rádióhullámsáv frekvenciáján továbbítják Két féle jelrendszer: Szabvány (ingyenes a közvetlen fee-től) Precíziós (USA és szövetségesei MIL) Három szegmens: ŰR- FÖLDI IRÁNYÍTÁSI Felhasználók eszközei 11
 az")
12 A jelenlegi teljes működési környezet 30 Operational Műhold (24 az alapvető fedéshez) 15 db. Block IIA működő műhold 12 db. Block IIR működő műhold 5 Block IIR műholdat modernizáltak 3 Block IIR-M működő műhold Az új - L2C - polgári jeleket sugározza Az USA folyamatosan elemzi a rendelkezésre állók működőképességét) az újabb fellövés esetleges szükségessége érdekében A globális GPS polgári felhasznlás teljesítményei 2003

13 IIR-15(M) fellövése szept. 25-én 13
14 A hullámsáv és frekvenciák Az L sáv használata: A 390 MHz MHz frekvenciatartomány. A GPS vivő frekvenciák e sávban: /L2/: 1227, 6 MHz és az /L1/: MHz). L1 frekvencia: ez a GPS műhold által kisugárzott kér rádiófrekvencia egyike, ami hordozza az ún. Coarse Acquisition Code-ot (C/A code), a P-Code-ot, és a navigációs üzenettartalmat; sugárzása az 1575,42 MHz-en történik L2 frekvencia: a kettőből a másik kisugárzott frekvencia, ez csak a P- Code-ot hordozza, és csak a 1227,6 MHz-en sugározzák.. Vivő frekvencia (Carrier Frequency) : a rádióadó berendezés modulálatlan kimeneti frekvenciája. C/A kód (Coarse/Acquisition Code) : a GPS szabvány pozíció jele a polgári használatra kisugározva, benne a GPS vevő által vehető pozíció pontosítási jelek (100 m-es pontossági értéken belül) és az időpont. P-Code: a GPS-jel precíziós kódja, csak a MIL által használatos, speciálisan kódolt (encrypted), amit 7-naponta midig módosítanak bármilyen iszemély hozzáférésének és használatának meggátpolására.
15 A mára modernizált GPS Civil jelek A Második polgári jel ( L2C ) A kereskedelmi célok kiszolgálására tervezték Nagyobb pontosság az ionoszférikus korrekción keresztül Nagyobb hatásos teljesítmény és feljavított adat-struktúra ezzel csökken az interferencia, a jel-vétel meggyorsul, és lehetővé teszi a vevő egységek további miniatürizálását, ezzel lehetővé teszi a helyiségeken belüli használatot A GPS Block IIR-M műholdaktól már csak e sávba, 2014-ben a 24 műhold mindegyike A Harmadik polgári jel ( L5 ) A közlekedés biztonságának követelményei (safety-of-life) teljesítésére tervezték A magas biztonsági védettségű Légiforgalmi Rádiónavigációs Szolgálatok ARNS) sávkját használja A GPS Block IIF műholdaknál ez a sáv van, a 24 műhold kb tól képes lesz kezelni A Negyedik polgári jel ( L1C ) A GNSS interoperabilitási követelményekre tervezik, a nemzetközi partnerség keretében A GPS Block III műholdakkal kezdik használni a 24 műhold kb körül lesz e képességgel ellátva
 Power Spectrum (dbw/hz) -220-230 -240-250 -220-230 -240-250 1227.6 Frequency (MHz) 16 ARNS Band RNSS Band ARNS Band 1227.6 1227.")
16 A GPS modernizáció képek Power Spectrum (dbw/hz) Power Spectrum (dbw/hz) previous as of Dec 2005 planned L5 L5 Power Spectrum (dbw/hz) Power Spectrum (dbw/hz) Frequency (MHz) 16 ARNS Band RNSS Band ARNS Band Frequency (MHz) L2 P(Y) Frequency (MHz) L2C M Frequency (MHz) C/A L1 L1C Block IIA, 1990 Block IIR-M, 2005 Block IIF, 2008 Block III, (artist s concept)
 Single frequency (L1) Anti-jam flex power Coarse acquisition (C/A) code navigation Precise Service ( 2.")
17 A GPS System-of-Systems fejlesztési programja (összefoglaló rajz) Space Segment Legacy (Block IIA/IIR) Modernized (Block IIR-M) Std Service ( 6 meters 2nd civil signal (L2C) RMS SIS SPS URE) M-Code signals (L1M, L2M) Single frequency (L1) Anti-jam flex power Coarse acquisition (C/A) code navigation Precise Service ( 2.6 m 95% URE PPS at Zero AOD) Y-Code (L1Y & L2Y) Y-Code navigation Modernized (Block IIF) 3rd civil signal (L5) GPS III (Block III) Increased accuracy Increased A/J power Signal integrity Search and Rescue L1C civil signal common w/galileo, QZSS, & possibly GLONASS Ground Segment Legacy TT&C L1 & L2 monitoring Upgraded (AEP) IIR-M IIF TT&C WAGE, AII, LADO NMCS/AMCS Modernized (OCX V1) New Architecture Signal Monitoring GPS III (OCX V2) GPS III TT&C Real-Time C2 17
18 A Földi Szegmens 4 fő alkotóeleme: Master Control Station (MCS) - Colorado Springs, USA Hamarosan cserélik az újra New Master Control Station [NMCS] Backup Master Control Station (BMCS) u.o. Hamarosan cserélik az Alternate Master Control Station [AMCS] 4 földi antenna (Gas) Ascension Island Cape Canaveral Diego Garcia Kwajalein Monitor Stations (MSs) - globálisan elhelyezett ellenőrző állomások hálózata (jelenleg 16)
19

20 TT&C Link Telemetry, Tracking & Command Interface Precise Positiponing Service Signal In Space
21 Az elvárt pontossági követelmények (valós, nem mai példa) Pozíció Precizitás Higulása (PDOP, Geometry) rendelkezésre állása Specifikáció 6-os PDOP mutató vagy kevesebb, az idő 98%-ában Jelenlegi: 99,98798% Vízszintes Szolgáltatás rendelkezésre állása Specifikáció: a 36 m 95 %-os küszöbértéke, az idő 99 %-ában Jelenlegi: 2,74 m Függőleges Szolgáltatás rendelkezésre állása Specifikáció: a 77 m 95 %-os küszöbértéke, az idő 99 %-ában vagy jobb Jelenlegi: 3,89 m Felhasználói Távolság Hiba Specifikáció: 6 m vagy kevesebb, konfigurációfüggő átlag Jelenlegi: lásd a példát a köv. slide-on A rendszer pontossága és rendelkezésre állása messze meghaladja a specifikációban 21 előírtakat.

22 Kiváló teljesítőképesség a távolsági pontosságban
23 Azért némi probléma mégis van

24 ½ RWY = 22,5 m W RWY =45 m
25 A megközelítésekről (fogalmak)

26 A támogató navigációs csoportok
27 Műszeres megközelítések meghatározása ICAO Annex 6, Part I.: Operations are to be classified in accordance to the achieved Minima at the end of an approach: Type A: Instrument approach operation 250 or above Type B: Instrument approach operation below 250

28 Műszeres megközelítések meghatározása
29 Műszeres megközelítési futópályák Annex 14 Vol I
30 Wide Area Augmentation System (WAAS) és a Local Area Augmentation System (LAAS)
31 A megközelítési eljárások 31
32 A megközelítések pontossága Jelenleg csak É-Amerikában használható A rendszer földi szegmensei máshol nincsenek kiépítve Pontossága: LPV - Localizer Performance with Vertical Guidance (lásd még később a pontossági elemeket)

33 WAAS architektúra 38 Referencia Állomás 3 Master Állomás 4 Jel-generátor Rendszer/ Föld-Föld Állomás 2 Geostacionárius Műhold Kapcsolat 2 Operatív Irányító Központ
 2006 novembere óta (csak datalink) A távolságmérés aktiválása 2008 közepétől")
34 GEO műholdak továbbfejlesztése IOC WAAS, a végső rendszerként a két Inmarsat műhold lett bevonva Az USA területe fölötti, szinte teljes, de csak egyszeres fedéssel Az Inmarsat műholdakat a WAAS üzemeltetésből 2007 júliusában kivonták A két kiváltó műhold telepítése 2005-től kezdve megtörtént Intelsat (Galaxy XV) 2006 novembere óta (csak datalink) A távolságmérés aktiválása 2008 közepétől Telesat Canada (Anik F1R) 2007 júliusa óta működik, korrekciós és távolságmérési céllal Intelsat 133 W Telesat 107 W 34
35 WAAS Földi és Űr szegmensei WAAS telepítés fázis WAAS leszállítva IOC I. fázis 2003 Full LPV teljesítmény II. fázis Full LPV-200 teljesítmény III. fázis Dual-frekvenciás üzemelés IV. fázis Eljárás-fejlesztés ~300/évente
36 WAAS Release 5 VPL Sensitivity Release 5 LPV200 LPV 99% VPL Percent of Alaska Percent of CONUS Release 5 90% of CONUS has 100% LPV Availability 48% of CONUS has 100% LPV200 Availability 62% of Alaska has 95% LPV Availability VPL (meters) 36
37 WAAS Release 6/7 Percent of Alaska Percent of CONUS 100% of CONUS has 100% LPV Availability 80% of CONUS has 100% LPV200 Availability Release 6/7 80% of Alaska has Release 6/7 95% LPV Availability LPV200 LPV 99% VPL VPL (meters) 37
")
38 WAAS Release 8/9 LPV200 LPV 99% VPL Percent of Alaska Percent of CONUS 100% of CONUS has 100% LPV Availability 84% of CONUS has 100% LPV200 Availability Release 8/9 86% of Alaska has 95% LPV Availability Release 8/9 42% of Alaska has 100% LPV Availability VPL (meters) 38
39 GPS teljesítmények a WAAS-sal és a LAAS-sal Horizontal 95% (Worst Location) Vertical 95% (Worst Location) GPS Standard WAAS LPV Standard 36 meters 16 meters WAAS LPV Actual 1.08 meters LAAS Cat-I Standard 16 meters LAAS Cat-I Actual 0.68 meters 77 meters 20 meters 1.26 meters 4 meters 1.17 meters Ez a WAAS teljesítmény értékelés összesen 1,761 millió mintavételre alapozott (ez összesen felhasználói napon) LAAS teljesítményét a Memphis repülőtéren végrehajtott 104 LAAS megközelítés eredményességére alapzoták. 39
40 A megközelítések (ismét)
41 Doc9613 PBN Manual A 2013-as ICAO PBN Manual (Doc 9613) a következő megközelítési formákat rögzíti az ún. RNP APCH üzemeltetési osztályba tartozóként: LNAV, LP, LNAV/VNAV and LPV).
42 A Basic RNAV és az RNP rendszerfunkciói (PBN)

43 A hagyományos és a területi navigáció eltérései Nyilvánvaló különbségek, hatékonyság, megtakarítások Futópályáknál:
44 Alapszintű avionikai követelmények (vázlatosan) Alapvető, hagyományos navigáció esetében Területi navigáció (RNAV) esetében
45 Komplex multi-szenzoros avionikai rendszer (vázlatosan) GPS/MMR Global Positioning System/Multi-Mode Receiver

46
47 GPS NPA (LNAV) = Non-Precision Approach (NPA) eljárás, ami a GPS-t és/vagy a WAAS-t használja a hosszirányú navigációhoz (Lateral Navigation) Az LNAV megközelítésben a pilóta a hosszirányú megközelítési szöggel repül, de nem kap függőleges helyzettájékoztatást az irányított süllyedéshez. Helyette, a végső megközelítés pontjától (FAF) a barometrikus magasságmérő alapján süllyed a minimális süllyedési magasságig. LNAV megközelítések kevésbé pontosak (556 m a hosszirányú határuk), és általában nem engedik meg a jellemzően az LNAV eljárások minimális süllyedési magasságának (MDA) 400 feet alatti értékét.
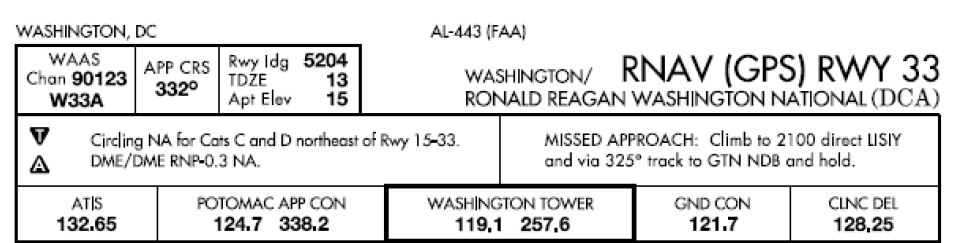
48 Példa GPS megközelítésre
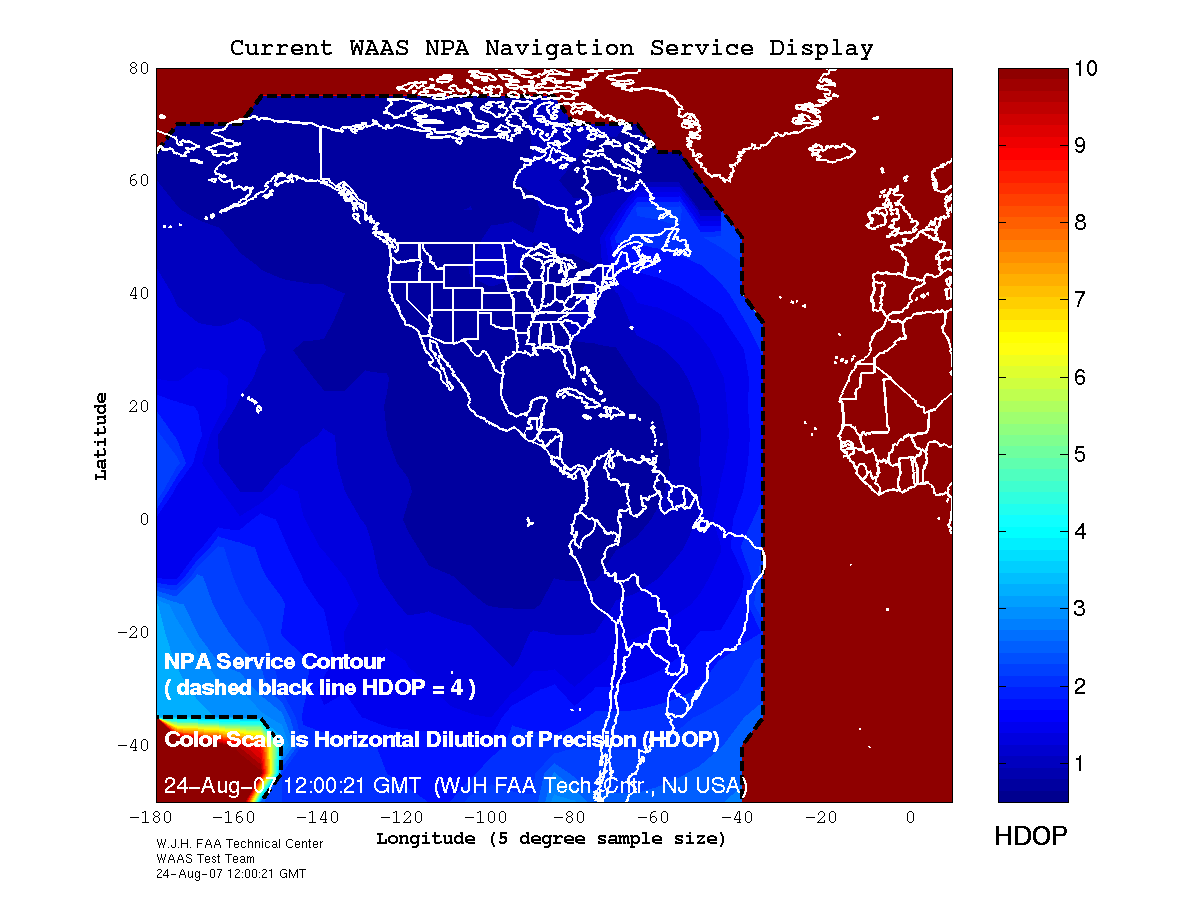
49 49 WAAS LNAV (NPA) teljesítmény-fedésterület
50 (1)
51 (2)
52 (3)

53 LHPR GNSS 30
54 LNAV/VNAV Az LNAV/VNAV (Lateral Navigation / Vertical Navigation) megközelítések során a GPS és/vagy a WAAS (556 m hosszirányú határértékig tartó) jeleit használják, a függőleges útmutatást pedig a vagy a barometrikus magasságmérőtől vagy a WAAS-tól kapják. A WAAS-t nem használó légijárműveknek a függőleges útmutatáshoz VNAV-képes magasságmérővel kell rendelkezniük, ami általában a repülésvezérlő rendszer része (flight management system - FMS). Az FMS avionika sokkal drágább, mint a WAAS vevő eszközök. Az LNAV/VNAV megközelítések tehát a függőleges és vízszintes útmutatással biztonságosabb irányított süllyedést tesznek lehetővé, így a DH értéke 350 feet a futópálya fölött.
55 LPV LPV (Localizer Performance with Vertical guidance) megközelítés hasonló az LNAV/VNAV eljárásokhoz, kivéve azt, hogy sokkal pontosabb (40 m hosszirányú határérték), és lehetővé teszi a feet magasságig süllyedést, ám csak a WAAS vavő berendezéssel repülhető. Az LPV megközelítések üzemszerűen megegyeznek a műszeres leszállító rendszerrel (ILS), de sokkal gazdaságosabb, mivel nem igénylik a leszállító berendezések földi telepítését a futópálya mentén.
56 WAAS Program III. fázis A teljes LPV-200 teljesítmény Erőteljes, megbízható és fenntartható LPV-200 képesség A WAAS Algoritmus frissítése a III. fázis kapcsán További kiegészítő GEO műholdak beszerzése Speciális védelmi mechanizmusok, algoritmus-hangolás (különösen a közeledő Nap maximumok esetében - Solar max.) A szerződéses döntés a WAAS III. fázisának továbbvitelére, még 2008 nyarán 56
57 WAAS Program Status Phase IV Kettős frekvencia-működtetés Az erőteljes, megbízható és fenntartható LPV-200 képesség folyamatos biztosítása Az egy (single) frekvenciát hassználni képes/tudó WAAS felhasználok támogatása a IV. fázis végéig (2028) A felhasználók kettős frekvencia-használati eszközökkel felszerelésének (L1/L5 avionika) GPS Architektúra Fejlesztési Tanulmányozási Csoport (GEAS) létrehozása már 2006 őszétől a GEAS feladata meghatározni és kidolgozni a jövőbeli GNSS-alapú rendszer-architektúrát a teljes világra szóló rendszerhez, az LPV-200 alapján, kb re 57

58 Példák a WAAS avionikára Mintegy ~18,000 WAAS-képes felhasználó A kb. 150,000 GA légijármű 40 %-a pl. a Garmin cég vevőkészülése Rockwell-Collins Challenger légijárművei -tóől2007 CMC WAAS szenzorok a Honeywell Primus 2000 FMS rendszerbe integrálása 2008-tól Universal Avionics, a WAAS-képesség beépítése az UNS-1 FMS TSO-ba 58

59 Local Area Augmentation System (LAAS) architektúra Precíziós megközelítések, Category I, II és III Többszörös futópálya-lefedés a repülőtéren Támogatott elhibázott megközelítési és indulási eljárások Légijármű földfelszíni navigáció 59
60 A jelenlegi GBAS tevékenységek GBAS GROUND-BASED AUGMENTATION SYSTEM GBAS elsődlegesen a precíziós megközelítések kiszolgálására készült Egységei: GBAS Ground Subsystem és a GBAS Aircraft Subsystem 1 GBAS Ground Subsystem korlátlan számú légijármű egységet (unit) tud kiszolgálni a GBAS fedésterületén belül A földi alrendszer a légijárművek számára a megközelítési sáv repülési adatait, a látómezőben tartózkodó műholdak számára korrekciós és integritási tájékoztatást nyújtanak. A korrekciós adatok lehetővé teszik a légijárműnek a megközelítési sávhoz viszonyított helyzete még jobb pontosítását A GBAS Űr-jel (Signal in Space) csak a földről az légijármű alrendszerre továbbítja az adatokat. A Műhold Signals in Space az alapvető GNSS műholdas rendszer része.

61
62 Folytatás EURÓPÁBAN: EGNOS (EU - Galileo) GLONASS (orosz) (folyt.köv.)
LirKom II. 4. ea. Jó napot, kollégák!
 LirKom II. 4. ea. Jó napot, kollégák! Global Positioning System (GPS) és az Augmentation rendszerek A GNSS világa ma (csak a nagyjelentőségűek) Global Navigation Satellite Systems A GPS lehetővé tesz legkülönfélébb
LirKom II. 4. ea. Jó napot, kollégák! Global Positioning System (GPS) és az Augmentation rendszerek A GNSS világa ma (csak a nagyjelentőségűek) Global Navigation Satellite Systems A GPS lehetővé tesz legkülönfélébb
GNSS Modernizáció. Horváth Tamás FÖMI Kozmikus Geodéziai Obszervatórium Penc. Tea előadás, 2006. június 1., Penc
 1 GNSS Modernizáció Horváth Tamás FÖMI Kozmikus Geodéziai Obszervatórium Penc Tea előadás, 2006. június 1., Penc Tartalom GPS GLONASS Galileo 2 GPS Block IIR Block IIA Block IIF 3 A GPS pontossága GPS
1 GNSS Modernizáció Horváth Tamás FÖMI Kozmikus Geodéziai Obszervatórium Penc Tea előadás, 2006. június 1., Penc Tartalom GPS GLONASS Galileo 2 GPS Block IIR Block IIA Block IIF 3 A GPS pontossága GPS
Takács Bence GPS: pontosság és megbízhatóság. Földmérők Világnapja és Európai Földmérők és Geoinformatikusok Napja Budapest, március 21.
 Takács Bence GPS: pontosság és megbízhatóság Földmérők Világnapja és Európai Földmérők és Geoinformatikusok Napja Budapest, 2018. március 21. AIRBUS A320 LOW VISIBILITY ILS CAT III AUTOLAND APPROACH IN
Takács Bence GPS: pontosság és megbízhatóság Földmérők Világnapja és Európai Földmérők és Geoinformatikusok Napja Budapest, 2018. március 21. AIRBUS A320 LOW VISIBILITY ILS CAT III AUTOLAND APPROACH IN
Automatikus Fedélzeti Irányító Rendszerek. Navigációs rendszerek a pilóta szemszögéből Tóth Gábor
 Automatikus Fedélzeti Irányító Rendszerek Navigációs rendszerek a pilóta szemszögéből Tóth Gábor VFR Visual Flight Rules A navigáció folyamatos földlátást igényel Minimálisan 5 km látástávolság szükséges
Automatikus Fedélzeti Irányító Rendszerek Navigációs rendszerek a pilóta szemszögéből Tóth Gábor VFR Visual Flight Rules A navigáció folyamatos földlátást igényel Minimálisan 5 km látástávolság szükséges
LirKom II. 4. ea. Jó reggelt, kollégák!
 LirKom II. 4. ea. Jó reggelt, kollégák! Global Positioning System (GPS) és az Augmentation rendszerek A GNSS világa ma (csak a nagyjelentőségűek) A GPS lehetővé tesz legkülönfélébb alkalmazásokat Positioning,
LirKom II. 4. ea. Jó reggelt, kollégák! Global Positioning System (GPS) és az Augmentation rendszerek A GNSS világa ma (csak a nagyjelentőségűek) A GPS lehetővé tesz legkülönfélébb alkalmazásokat Positioning,
HÍRADÁSTECHNIKA I. Dr.Varga Péter János
 6. HÍRADÁSTECHNIKA I. Dr.Varga Péter János 2 Műholdas kommunikáció 3 4 Helymeghatározás 5 Alkalmazott műholdpályák, tulajdonságaik 6 Alkalmazott műholdpályák, tulajdonságaik A LEO [Low Earth Orbiter ]
6. HÍRADÁSTECHNIKA I. Dr.Varga Péter János 2 Műholdas kommunikáció 3 4 Helymeghatározás 5 Alkalmazott műholdpályák, tulajdonságaik 6 Alkalmazott műholdpályák, tulajdonságaik A LEO [Low Earth Orbiter ]
Híradástechnika I. 5.ea
 } Híradástechnika I. 5.ea Dr.Varga Péter János 2 Műholdas kommunikáció 3 4 Alkalmazott műholdpályák, tulajdonságaik 5 Alkalmazott műholdpályák, tulajdonságaik A LEO [Low Earth Orbiter ] magába foglalja
} Híradástechnika I. 5.ea Dr.Varga Péter János 2 Műholdas kommunikáció 3 4 Alkalmazott műholdpályák, tulajdonságaik 5 Alkalmazott műholdpályák, tulajdonságaik A LEO [Low Earth Orbiter ] magába foglalja
Hegyi Ádám István ELTE, április 25.
 Hegyi Ádám István ELTE, 2012. április 25. GPS = Global Positioning System Department of Defense = Amerikai Egyesült Államok Védelmi Minisztériuma 1973 DNSS = Defense Navigation Satellite System vagy Navstar-GPS
Hegyi Ádám István ELTE, 2012. április 25. GPS = Global Positioning System Department of Defense = Amerikai Egyesült Államok Védelmi Minisztériuma 1973 DNSS = Defense Navigation Satellite System vagy Navstar-GPS
A BIZOTTSÁG (EU) 2018/1048 VÉGREHAJTÁSI RENDELETE
 2018/1048 VÉGREHAJTÁSI RENDELETE") 2018.7.26. L 189/3 RENDELETEK A BIZOTTSÁG (EU) 2018/1048 VÉGREHAJTÁSI RENDELETE (2018. július 18.) a teljesítményalapú navigációval kapcsolatos légtérhasználati követelmények és üzemeltetési eljárások
2018.7.26. L 189/3 RENDELETEK A BIZOTTSÁG (EU) 2018/1048 VÉGREHAJTÁSI RENDELETE (2018. július 18.) a teljesítményalapú navigációval kapcsolatos légtérhasználati követelmények és üzemeltetési eljárások
Kincskeresés GPS-el: a korszerű navigáció alapjai
 2007. február 22. : a korszerű navigáció alapjai Kovács Béla Térképtudományi és Geoinformatikai Tanszék Eötvös Loránd Tudományegyetem, Informatika Kar Térképtudományi és Geoinformatikai Tanszék 1117 Budapest,
2007. február 22. : a korszerű navigáció alapjai Kovács Béla Térképtudományi és Geoinformatikai Tanszék Eötvös Loránd Tudományegyetem, Informatika Kar Térképtudományi és Geoinformatikai Tanszék 1117 Budapest,
Globális mőholdas navigációs rendszerek
 Globális mőholdas navigációs rendszerek Oktatási segédanyag a vadgazda MSc levelezı hallgatók számára az EG520 Geomatikai és térinformatikai ismeretek címő tárgyhoz Készítette: Bazsó Tamás Kiegészítette:
Globális mőholdas navigációs rendszerek Oktatási segédanyag a vadgazda MSc levelezı hallgatók számára az EG520 Geomatikai és térinformatikai ismeretek címő tárgyhoz Készítette: Bazsó Tamás Kiegészítette:
TestLine - nummulites_gnss Minta feladatsor
 1.* Egy műholdas helymeghatározás lehet egyszerre abszolút és kinematikus. 2.* műholdak pillanatnyi helyzetéből és a megmért távolságokból számítható a vevő pozíciója. 3.* 0:55 Nehéz kinai BEIDOU, az amerikai
1.* Egy műholdas helymeghatározás lehet egyszerre abszolút és kinematikus. 2.* műholdak pillanatnyi helyzetéből és a megmért távolságokból számítható a vevő pozíciója. 3.* 0:55 Nehéz kinai BEIDOU, az amerikai
GPS. 1.a A GLONASS rendszer. Feladata. A rendszer felépítése. A GLONASS és s a GALILEO GPS- rendszerek. Céljaiban NAVSTAR GPS rendszerhez
 GPS A GLONASS és s a GALILEO GPS- rendszerek Összeállította: Szűcs LászlL szló 1.a A GLONASS rendszer Globális lis Navigáci ciós s Műholdrendszer M orosz elnevezés s rövidr vidítése Céljaiban és s kialakításában
GPS A GLONASS és s a GALILEO GPS- rendszerek Összeállította: Szűcs LászlL szló 1.a A GLONASS rendszer Globális lis Navigáci ciós s Műholdrendszer M orosz elnevezés s rövidr vidítése Céljaiban és s kialakításában
A GPS pozíciók pontosításának lehetőségei
 A GPS pozíciók pontosításának lehetőségei GIS OPEN 2005 Bartha Csaba csaba.bartha@geopro.hu Milyen fogalmakkal találkozunk? VRS GPS FKP EGNOS DGPS RTCM OGPSH GLONASS WAAS RTK STATIKUS GSM KINEMATIKUS URH
A GPS pozíciók pontosításának lehetőségei GIS OPEN 2005 Bartha Csaba csaba.bartha@geopro.hu Milyen fogalmakkal találkozunk? VRS GPS FKP EGNOS DGPS RTCM OGPSH GLONASS WAAS RTK STATIKUS GSM KINEMATIKUS URH
INFORMATIKA ÁGAZATI ALKALMAZÁSAI. Az Agrármérnöki MSc szak tananyagfejlesztése TÁMOP-4.1.2-08/1/A-2009-0010
 INFORMATIKA ÁGAZATI ALKALMAZÁSAI Az Agrármérnöki MSc szak tananyagfejlesztése TÁMOP-4.1.2-08/1/A-2009-0010 10. GPS, GPRS (mobilkommunikációs) ismeretek Helymeghatározás GPS rendszer alapelve GNSS rendszerek
INFORMATIKA ÁGAZATI ALKALMAZÁSAI Az Agrármérnöki MSc szak tananyagfejlesztése TÁMOP-4.1.2-08/1/A-2009-0010 10. GPS, GPRS (mobilkommunikációs) ismeretek Helymeghatározás GPS rendszer alapelve GNSS rendszerek
GPS szótár. A legfontosabb 25 kifejezés a GPS világából. Készítette: Gere Tamás A GPSArena.hu alapítója
 A legfontosabb 25 kifejezés a GPS világából Készítette: Gere Tamás A GPSArena.hu alapítója 2D/3D vétel Megadja, hogy a GPS vétel síkbeli (2D) vagy térbeli (3D). Utóbbi esetben magassági adat is rendelkezésre
A legfontosabb 25 kifejezés a GPS világából Készítette: Gere Tamás A GPSArena.hu alapítója 2D/3D vétel Megadja, hogy a GPS vétel síkbeli (2D) vagy térbeli (3D). Utóbbi esetben magassági adat is rendelkezésre
2007. március 23. INFO SAVARIA 2007. GNSS alapok. Eötvös Loránd Tudományegyetem, Informatika Kar. Térképtudományi és Geoinformatikai Tanszék
 2007. március 23. INFO SAVARIA 2007 GPS/GNSS GNSS alapok Kovács Béla Térképtudományi és Geoinformatikai Tanszék Eötvös Loránd Tudományegyetem, Informatika Kar Térképtudományi és Geoinformatikai Tanszék
2007. március 23. INFO SAVARIA 2007 GPS/GNSS GNSS alapok Kovács Béla Térképtudományi és Geoinformatikai Tanszék Eötvös Loránd Tudományegyetem, Informatika Kar Térképtudományi és Geoinformatikai Tanszék
GPS és atomóra. Kunsági-Máté Sándor. Fizikus MSc 1. évfolyam
 GPS és atomóra Kunsági-Máté Sándor Fizikus MSc 1. évfolyam Informatikai eszközök fizikai alapjai, 2017. március 1. Eötvös Loránd Tudományegyetem, Természettudományi Kar, Budapest Történeti bevezető 1957
GPS és atomóra Kunsági-Máté Sándor Fizikus MSc 1. évfolyam Informatikai eszközök fizikai alapjai, 2017. március 1. Eötvös Loránd Tudományegyetem, Természettudományi Kar, Budapest Történeti bevezető 1957
HÍRADÁSTECHNIKA. Dr.Varga Péter János
 HÍRADÁSTECHNIKA Dr.Varga Péter János 2 A jelátvitel fizikai közegei 3 Vezeték nélküli átvitel Optikai átvitel - Lézer átvitel 4 pont-pont közötti adatátvitel, láthatóság átvitel lézerrel néhány km távolság
HÍRADÁSTECHNIKA Dr.Varga Péter János 2 A jelátvitel fizikai közegei 3 Vezeték nélküli átvitel Optikai átvitel - Lézer átvitel 4 pont-pont közötti adatátvitel, láthatóság átvitel lézerrel néhány km távolság
A léginavigációs és ATM tevékenységek alapjául szolgáló jogszabályok
 1 A léginavigációs és ATM tevékenységek alapjául szolgáló jogszabályok 1. A Tanács 95/93/EGK rendelete (1993. január 18.) a Közösség repülőterein alkalmazandó résidőkiosztás egységes szabályairól Az Európai
1 A léginavigációs és ATM tevékenységek alapjául szolgáló jogszabályok 1. A Tanács 95/93/EGK rendelete (1993. január 18.) a Közösség repülőterein alkalmazandó résidőkiosztás egységes szabályairól Az Európai
GPS. Lehoczki Róbert Vadvilág Megőrzési Intézet Szent István Egyetem, Gödöllő
 GPS Lehoczki Róbert Vadvilág Megőrzési Intézet Szent István Egyetem, Gödöllő Három technológiát egyesít: GPS (helymeghatározás) Robosztus terepen is használható hardver Egyszerű és hatékony szoftver Mire
GPS Lehoczki Róbert Vadvilág Megőrzési Intézet Szent István Egyetem, Gödöllő Három technológiát egyesít: GPS (helymeghatározás) Robosztus terepen is használható hardver Egyszerű és hatékony szoftver Mire
A navigációs műholdrendszerek fontosabb jellemzői. A műholdas helymeghatározás fejlődéstörténete.
 1. előadás: A navigációs műholdrendszerek fontosabb jellemzői. A műholdas helymeghatározás fejlődéstörténete. 1.1 Bevezetés Napjainkban egyre inkább felértékelődik a helyhez kapcsolt információk szerepe.
1. előadás: A navigációs műholdrendszerek fontosabb jellemzői. A műholdas helymeghatározás fejlődéstörténete. 1.1 Bevezetés Napjainkban egyre inkább felértékelődik a helyhez kapcsolt információk szerepe.
HÍRADÁSTECHNIKA I. Dr.Varga Péter János
 3. HÍRADÁSTECHNIKA I. Dr.Varga Péter János 2 Műholdas kommunikáció 3 4 Helymeghatározás 5 Alkalmazott műholdpályák, tulajdonságaik 6 Alkalmazott műholdpályák, tulajdonságaik A LEO [Low Earth Orbiter ]
3. HÍRADÁSTECHNIKA I. Dr.Varga Péter János 2 Műholdas kommunikáció 3 4 Helymeghatározás 5 Alkalmazott műholdpályák, tulajdonságaik 6 Alkalmazott műholdpályák, tulajdonságaik A LEO [Low Earth Orbiter ]
GNSS/RNSS rendszerek a földmegfigyelésben. Dr. Rózsa Szabolcs. Általános és Felsőgeodézia Tanszék
 GNSS/RNSS rendszerek a földmegfigyelésben Általános és Felsőgeodézia Tanszék Dr. Rózsa Szabolcs Minőségorientált, összehangolt oktatási és K+F+I stratégia, valamint működési modell kidolgozása a Műegyetemen
GNSS/RNSS rendszerek a földmegfigyelésben Általános és Felsőgeodézia Tanszék Dr. Rózsa Szabolcs Minőségorientált, összehangolt oktatási és K+F+I stratégia, valamint működési modell kidolgozása a Műegyetemen
Hol tart a GNSS állapot-tér modellezés bevezetése?
 Hol tart a GNSS állapot-tér modellezés bevezetése? Horváth Tamás FÖMI Kozmikus Geodéziai Obszervatórium horvath@gnssnet.hu www.gnssnet.hu Tel: +36-27-374-980, Mobil: +36-30-867-2570 Rédey István Geodéziai
Hol tart a GNSS állapot-tér modellezés bevezetése? Horváth Tamás FÖMI Kozmikus Geodéziai Obszervatórium horvath@gnssnet.hu www.gnssnet.hu Tel: +36-27-374-980, Mobil: +36-30-867-2570 Rédey István Geodéziai
AZ EURÓPAI KÖZÖSSÉGEK BIZOTTSÁGA. Tervezet A BIZOTTSÁG.../.../EU RENDELETE
 AZ EURÓPAI KÖZÖSSÉGEK BIZOTTSÁGA Brüsszel, C Tervezet A BIZOTTSÁG.../.../EU RENDELETE ([ ]) a nem közforgalmi repülésekre vonatkozó műszaki követelmények és közigazgatási eljárások meghatározásáról, valamint
AZ EURÓPAI KÖZÖSSÉGEK BIZOTTSÁGA Brüsszel, C Tervezet A BIZOTTSÁG.../.../EU RENDELETE ([ ]) a nem közforgalmi repülésekre vonatkozó műszaki követelmények és közigazgatási eljárások meghatározásáról, valamint
Interferencia jelenségek a BME permanens állomásán
 Interferencia jelenségek a BME permanens állomásán Takács Bence, egyetemi docens takacs.bence@epito.bme.hu Rédey szeminárium 2017. március 3. Nagy teljesítményű blokkolók hatótávolság : 200 km adó teljesítmény
Interferencia jelenségek a BME permanens állomásán Takács Bence, egyetemi docens takacs.bence@epito.bme.hu Rédey szeminárium 2017. március 3. Nagy teljesítményű blokkolók hatótávolság : 200 km adó teljesítmény
Székesfehérvár
 1 2009.03.19. - Székesfehérvár System1200-2004 SmartStation - 2005 SmartRover - 2006 SmartPole/TPS1200+ 2007 SmartRTK + MAC 2008 GPS1200+ GNSS 2009-200? 2 ? Elérhető GNSS jelek haszn. Modern hálózati megold.
1 2009.03.19. - Székesfehérvár System1200-2004 SmartStation - 2005 SmartRover - 2006 SmartPole/TPS1200+ 2007 SmartRTK + MAC 2008 GPS1200+ GNSS 2009-200? 2 ? Elérhető GNSS jelek haszn. Modern hálózati megold.
Műholdas infokommunikációs rendszerek
 Mobil Informatika Műholdas infokommunikációs rendszerek Dr. Kutor László OE-NIK, Dr.Kutor László MoI 4/24/1 Műholdas távközlési rendszerek GEO (Geostationary Earth Orbit Satellite) Geostacionáris pályán
Mobil Informatika Műholdas infokommunikációs rendszerek Dr. Kutor László OE-NIK, Dr.Kutor László MoI 4/24/1 Műholdas távközlési rendszerek GEO (Geostationary Earth Orbit Satellite) Geostacionáris pályán
A GNSS infrastruktúrára támaszkodó műholdas helymeghatározás. Borza Tibor (FÖMI KGO) Busics György (NyME GEO)
 Busics György (NyME GEO)") A GNSS infrastruktúrára támaszkodó műholdas helymeghatározás Borza Tibor (FÖMI KGO) Busics György (NyME GEO) Tartalom Mi a GNSS, a GNSS infrastruktúra? Melyek az infrastruktúra szintjei? Mi a hazai helyzet?
A GNSS infrastruktúrára támaszkodó műholdas helymeghatározás Borza Tibor (FÖMI KGO) Busics György (NyME GEO) Tartalom Mi a GNSS, a GNSS infrastruktúra? Melyek az infrastruktúra szintjei? Mi a hazai helyzet?
Leica Viva GNSS SmartLink technológia. Csábi Zoltán mérnök üzletkötő, Kelet-Magyarország
 Leica Viva GNSS SmartLink technológia Csábi Zoltán mérnök üzletkötő, Kelet-Magyarország Kitoljuk a határokat Leica Viva GNSS technológia Az igazi határ ott van ahol a műszer még éppen működik, illetve
Leica Viva GNSS SmartLink technológia Csábi Zoltán mérnök üzletkötő, Kelet-Magyarország Kitoljuk a határokat Leica Viva GNSS technológia Az igazi határ ott van ahol a műszer még éppen működik, illetve
GNSS a precíziós mezőgazdaságban
 GNSS a precíziós mezőgazdaságban 2015.10.27. 1/14 GNSS a precíziós mezőgazdaságban Horváth Tamás Alberding GmbH GPS25 Konferencia Műholdas helymeghatározás Magyarországon 1990-2015 2015. október 27., Budapest
GNSS a precíziós mezőgazdaságban 2015.10.27. 1/14 GNSS a precíziós mezőgazdaságban Horváth Tamás Alberding GmbH GPS25 Konferencia Műholdas helymeghatározás Magyarországon 1990-2015 2015. október 27., Budapest
Alapok GPS előzmnyei Navstar How the GPS locate the position Tények Q/A GPS. Varsányi Péter
 Alapok előzmnyei Navstar How the locate the position Tények Q/A Óbudai Egyetem Alba Regia Egyetemi Központ (AREK) Székesfehérvár 2011. december 8. Alapok előzmnyei Navstar How the locate the position Tények
Alapok előzmnyei Navstar How the locate the position Tények Q/A Óbudai Egyetem Alba Regia Egyetemi Központ (AREK) Székesfehérvár 2011. december 8. Alapok előzmnyei Navstar How the locate the position Tények
HÍRADÁSTECHNIKA. 5.ea. Dr.Varga Péter János
 HÍRADÁSTECHNIKA 5.ea Dr.Varga Péter János 2 Műholdas kommunikáció 3 4 Helymeghatározás 5 Alkalmazott műholdpályák, tulajdonságaik 6 Alkalmazott műholdpályák, tulajdonságaik A LEO [Low Earth Orbiter ] magába
HÍRADÁSTECHNIKA 5.ea Dr.Varga Péter János 2 Műholdas kommunikáció 3 4 Helymeghatározás 5 Alkalmazott műholdpályák, tulajdonságaik 6 Alkalmazott műholdpályák, tulajdonságaik A LEO [Low Earth Orbiter ] magába
HÍRKÖZLÉSTECHNIKA. 4.ea. Dr.Varga Péter János
 HÍRKÖZLÉSTECHNIKA 4.ea Dr.Varga Péter János Pont-pont összeköttetés tervezése 2 Wifi Fresnel 3 Pont-pont összeköttetés tervezése 4 Pont-pont összeköttetés tervezése 5 Tengeri kábelezés 6 7 Műholdas kommunikáció
HÍRKÖZLÉSTECHNIKA 4.ea Dr.Varga Péter János Pont-pont összeköttetés tervezése 2 Wifi Fresnel 3 Pont-pont összeköttetés tervezése 4 Pont-pont összeköttetés tervezése 5 Tengeri kábelezés 6 7 Műholdas kommunikáció
INFORMATIKA ÁGAZATI ALKALMAZÁSAI. Az Agrármérnöki MSc szak tananyagfejlesztése TÁMOP-4.1.2-08/1/A-2009-0010
 INFORMATIKA ÁGAZATI ALKALMAZÁSAI Az Agrármérnöki MSc szak tananyagfejlesztése TÁMOP-4.1.2-08/1/A-2009-0010 13. GNSS mérés tervezése, végrehajtása Tervezés célja, eszközei, almanach GNSS tervező szoftverek
INFORMATIKA ÁGAZATI ALKALMAZÁSAI Az Agrármérnöki MSc szak tananyagfejlesztése TÁMOP-4.1.2-08/1/A-2009-0010 13. GNSS mérés tervezése, végrehajtása Tervezés célja, eszközei, almanach GNSS tervező szoftverek
WRC-15. A WRC-15 Rádiótávközlési Világértekezlet 1.5 és 1.16 napirendi pontjaira történő felkészülés helyzete. Koroncz László
 WRC-15 Koroncz László spektrumgazdálkodási mérnök Védelmi és Rendészeti Frekvenciagazdálkodási Főosztály Spektrumgazdálkodási és NATO Osztály A WRC-15 Rádiótávközlési Világértekezlet 1.5 és 1.16 napirendi
WRC-15 Koroncz László spektrumgazdálkodási mérnök Védelmi és Rendészeti Frekvenciagazdálkodási Főosztály Spektrumgazdálkodási és NATO Osztály A WRC-15 Rádiótávközlési Világértekezlet 1.5 és 1.16 napirendi
Az a személy akinek joga a légijármûvel kapcsolatos minden kérdés végsõ eldöntése a repülés idõtartama alatt: A parancsnok
 1. oldal 1. 2. 100413 212 00 00 00 Légijog Kivéve, ha egy légiforgalmi irányító egységtõl erre engedélyt kapott, VFR szerint mûködõ légijármû nem léphet be egy repülõtéri irányító körzetbe, illetve nem
1. oldal 1. 2. 100413 212 00 00 00 Légijog Kivéve, ha egy légiforgalmi irányító egységtõl erre engedélyt kapott, VFR szerint mûködõ légijármû nem léphet be egy repülõtéri irányító körzetbe, illetve nem
A REPÜLÉSBEN ALKALMAZOTT RADARRENDSZEREK
 Géczi József Dr. Békési László A REPÜLÉSBEN ALKALMAZOTT RADARRENDSZEREK A radarberendezéseket a légi közlekedésben működési elvük, adásmódjuk és elhelyezésük szerint osztályozzuk. Működésük szerint elsődleges
Géczi József Dr. Békési László A REPÜLÉSBEN ALKALMAZOTT RADARRENDSZEREK A radarberendezéseket a légi közlekedésben működési elvük, adásmódjuk és elhelyezésük szerint osztályozzuk. Működésük szerint elsődleges
DAY 2. Ea.: Mudra István
 DAY 2 Ea.: Mudra István Futópálya (RWY runway) Küszöb (THR threshold) : ált. a futópálya végénél (2 küszöb van)! Áthelyezésre spec. Szabályok, az LDA ilyenkor mindig érintett lesz Időszakosan áthelyezett
DAY 2 Ea.: Mudra István Futópálya (RWY runway) Küszöb (THR threshold) : ált. a futópálya végénél (2 küszöb van)! Áthelyezésre spec. Szabályok, az LDA ilyenkor mindig érintett lesz Időszakosan áthelyezett
Közlekedésmérnöki és Jármőmérnöki Kar Közlekedés- és Jármőirányítási Tanszék
 Budapesti Mőszaki és Gazdaságtudományi Egyetem Közlekedésmérnöki és Jármőmérnöki Kar Közlekedés- és Jármőirányítási Tanszék ZÁRTHELYI DOLGOZATRA FELKÉSZÍTŐ KÉRDÉSEK LÉGIKÖZLEKEDÉSI IRÁNYÍTÓ ÉS KOMMUNIKÁCIÓS
Budapesti Mőszaki és Gazdaságtudományi Egyetem Közlekedésmérnöki és Jármőmérnöki Kar Közlekedés- és Jármőirányítási Tanszék ZÁRTHELYI DOLGOZATRA FELKÉSZÍTŐ KÉRDÉSEK LÉGIKÖZLEKEDÉSI IRÁNYÍTÓ ÉS KOMMUNIKÁCIÓS
AZ EGNOS RENDSZER ÉS ALKALMAZÁSA SORÁN SZERZETT TAPASZTALATOK
 Koncz Miklós Tamás 1 AZ EGNOS RENDSZER ÉS ALKALMAZÁSA SORÁN SZERZETT TAPASZTALATOK Absztrakt Korunk társadalma egyre jobban technológiafüggővé válik, erre egyik jó példa a műholdas navigációs rendszerek
Koncz Miklós Tamás 1 AZ EGNOS RENDSZER ÉS ALKALMAZÁSA SORÁN SZERZETT TAPASZTALATOK Absztrakt Korunk társadalma egyre jobban technológiafüggővé válik, erre egyik jó példa a műholdas navigációs rendszerek
A honvédelmi miniszter /2008. ( ) HM. rendelete
 HM. rendelete") A honvédelmi miniszter /2008. ( ) HM rendelete az állami repülések céljára szolgáló repülőtér és a katonai repülés céljára földön telepített léginavigációs berendezés üzemben tartásának feltételeiről szóló
A honvédelmi miniszter /2008. ( ) HM rendelete az állami repülések céljára szolgáló repülőtér és a katonai repülés céljára földön telepített léginavigációs berendezés üzemben tartásának feltételeiről szóló
KJIT LÉGIR I. 4. előadás
 KJIT LÉGIR I. 4. előadás Történet Navigare necesse est (minden navigációról szóló anyag kötelező eleme ) A hajózásból került át szinte minden Pl.: mértékegységek (NM, kt = NM/h), starboard portside, first
KJIT LÉGIR I. 4. előadás Történet Navigare necesse est (minden navigációról szóló anyag kötelező eleme ) A hajózásból került át szinte minden Pl.: mértékegységek (NM, kt = NM/h), starboard portside, first
A műholdas helymeghatározás infrastruktúrája
 Népszerűen a műholdas helymeghatározásról és navigációról 2. rész Az idő mérése, karóránk leolvasása, ma mindannyiunk számára természetes tevékenység. De vajon ugyanilyen természetes és szükséges lesz-e
Népszerűen a műholdas helymeghatározásról és navigációról 2. rész Az idő mérése, karóránk leolvasása, ma mindannyiunk számára természetes tevékenység. De vajon ugyanilyen természetes és szükséges lesz-e
A repülős adatbázis 28 napig érvényes és az összes repülőtér információt tartalmazza, navigációs segédinformációkkal és kereszteződés adatokkal.
 Garmin D2 Charlie repülős funkciók leírása A repülési adatbázis frissítése Mielőtt frissíthetné a repülési adatbázist, készítenie kell egy Garmin fiókot, és ahhoz hozzá kell adnia készülékét. A készüléke
Garmin D2 Charlie repülős funkciók leírása A repülési adatbázis frissítése Mielőtt frissíthetné a repülési adatbázist, készítenie kell egy Garmin fiókot, és ahhoz hozzá kell adnia készülékét. A készüléke
Leica SmartRTK, az aktív ionoszféra kezelésének záloga (I. rész)
") Leica SmartRTK, az aktív ionoszféra kezelésének záloga (I. rész) Aki egy kicsit is nyomon követi a GNSS technológia aktualitásait, az egyre gyakrabban találkozhat különböző cikkekkel, értekezésekkel, melyek
Leica SmartRTK, az aktív ionoszféra kezelésének záloga (I. rész) Aki egy kicsit is nyomon követi a GNSS technológia aktualitásait, az egyre gyakrabban találkozhat különböző cikkekkel, értekezésekkel, melyek
Tamas Kovacsics Head of ATCC ATC
 ~ Tamas Kovacsics Head of ATCC ATC Légiforgalmi irány nyító szolgálat lat Air Traffic Control (ATC) A légiközlekedés XX. században megindult fejlődése szükségessé tette egy olyan szolgálat létrehozását,
~ Tamas Kovacsics Head of ATCC ATC Légiforgalmi irány nyító szolgálat lat Air Traffic Control (ATC) A légiközlekedés XX. században megindult fejlődése szükségessé tette egy olyan szolgálat létrehozását,
A gazdasági és közlekedési miniszter.../2006. (...) GKM. rendelete
 GKM. rendelete") III-3R/92/1/2006. Tervezet! A gazdasági és közlekedési miniszter.../2006. (......) GKM rendelete a polgári légiforgalmi szolgálat szakszemélyzetének szakszolgálati engedélyéről és képzéséről szóló 3/2004.
III-3R/92/1/2006. Tervezet! A gazdasági és közlekedési miniszter.../2006. (......) GKM rendelete a polgári légiforgalmi szolgálat szakszemélyzetének szakszolgálati engedélyéről és képzéséről szóló 3/2004.
Helymeghatározó rendszerek
 Helymeghatározó rendszerek objektumok (járművek, utazók, áruk, stb.) térbeli jellemzői + digitális térkép forgalomirányító, forgalombefolyásoló és navigációs rendszerek, valamint a helytől függő információs
Helymeghatározó rendszerek objektumok (járművek, utazók, áruk, stb.) térbeli jellemzői + digitális térkép forgalomirányító, forgalombefolyásoló és navigációs rendszerek, valamint a helytől függő információs
DAY 3. Ea.: Mudra István
 DAY 3 Ea.: Mudra István Vizuális segédeszközök - 1 Széirány-jelző (buló): kötelezően 1 db (célszerűen a leszállási zóna mentén) m d e h d h 300 m-ről felismerhetően látható legyen Fehár vagy narancssárga
DAY 3 Ea.: Mudra István Vizuális segédeszközök - 1 Széirány-jelző (buló): kötelezően 1 db (célszerűen a leszállási zóna mentén) m d e h d h 300 m-ről felismerhetően látható legyen Fehár vagy narancssárga
(ICAO Doc 9476 1986) Útmutató, irányító (avagy szabályozó) rendszer egy repülőtér munkaterületén, valamennyi ott működő. kezelésére.
 Útmutató, irányító (avagy szabályozó) rendszer egy repülőtér munkaterületén, valamennyi ott működő. kezelésére.") Mudra István, 2015 9. ea. LirKom II. (ICAO Doc 9476 1986) Útmutató, irányító (avagy szabályozó) rendszer egy repülőtér munkaterületén, valamennyi ott működő Légijármű Gépjármű Személy(zet)ek kezelésére.
Mudra István, 2015 9. ea. LirKom II. (ICAO Doc 9476 1986) Útmutató, irányító (avagy szabályozó) rendszer egy repülőtér munkaterületén, valamennyi ott működő Légijármű Gépjármű Személy(zet)ek kezelésére.
RTKLIB alapú monitorozó alkalmazások
 Horváth Tamás RTKLIB alapú monitorozó megoldások 2015.11.27. 1/28 RTKLIB alapú monitorozó alkalmazások Horváth Tamás Alberding GmbH FOSS4GÉZÚ Nyílt forráskódú térinformatikai munkaértekezlet 2015. november
Horváth Tamás RTKLIB alapú monitorozó megoldások 2015.11.27. 1/28 RTKLIB alapú monitorozó alkalmazások Horváth Tamás Alberding GmbH FOSS4GÉZÚ Nyílt forráskódú térinformatikai munkaértekezlet 2015. november
Babeș Bólyai Tudományegyetem Informatika kar Műholdas helymeghatározás a GPS rendszerrel
 Babeș Bólyai Tudományegyetem Informatika kar Műholdas helymeghatározás a GPS rendszerrel Szűcs Attila Levente Kolozsvár, 2010 Április 29. 1. Bevezető A GPS az angol Global Positioning System megnevezés
Babeș Bólyai Tudományegyetem Informatika kar Műholdas helymeghatározás a GPS rendszerrel Szűcs Attila Levente Kolozsvár, 2010 Április 29. 1. Bevezető A GPS az angol Global Positioning System megnevezés
GISopen 2012, Székesfehérvár Indoor-Positioning. Gombás László
 GISopen 2012, Székesfehérvár Indoor-Positioning Gombás László Az Indoor Positioning módszerek Forrás: Rainer Mautz 2011: Overview of Indoor Positioning Technologies, Keynotes, IPIN 2011, Guimaraes 2 GNSS
GISopen 2012, Székesfehérvár Indoor-Positioning Gombás László Az Indoor Positioning módszerek Forrás: Rainer Mautz 2011: Overview of Indoor Positioning Technologies, Keynotes, IPIN 2011, Guimaraes 2 GNSS
A WRC-15 Rádiótávközlési Világértekezletre történő felkészülés jelenlegi helyzete. CPG PTD munkacsoport. Bálint Irén Spektrumgazdálkodási osztály
 Bálint Irén Spektrumgazdálkodási osztály 2013. november 8. A WRC-15 Rádiótávközlési Világértekezletre történő felkészülés jelenlegi helyzete CPG PTD munkacsoport CPG PTD munkacsoport 2 Feladatok : a WRC-15
Bálint Irén Spektrumgazdálkodási osztály 2013. november 8. A WRC-15 Rádiótávközlési Világértekezletre történő felkészülés jelenlegi helyzete CPG PTD munkacsoport CPG PTD munkacsoport 2 Feladatok : a WRC-15
Helymeghatározó technikák
 Mobil Informatika Dr. Kutor László Helymeghatározó technikák http://uni-obuda.hu/users/kutor/ MoI 5/24/1 Műholdas távközlési rendszerek GEO (Geostationary Earth Orbit Satellite) Geostacionáris pályán keringő
Mobil Informatika Dr. Kutor László Helymeghatározó technikák http://uni-obuda.hu/users/kutor/ MoI 5/24/1 Műholdas távközlési rendszerek GEO (Geostationary Earth Orbit Satellite) Geostacionáris pályán keringő
Mozgó jármű helyzetének és tájolásának meghatározása alacsony árú GNSS és inerciális érzékelők szoros csatolású integrációjával
 Mozgó jármű helyzetének és tájolásának meghatározása alacsony árú GNSS és inerciális érzékelők szoros csatolású integrációjával Farkas Márton Rédey István Geodéziai Szeminárium 2019. április 2. Áttekintés
Mozgó jármű helyzetének és tájolásának meghatározása alacsony árú GNSS és inerciális érzékelők szoros csatolású integrációjával Farkas Márton Rédey István Geodéziai Szeminárium 2019. április 2. Áttekintés
Aktív GNSS hálózat fejlesztése
 Aktív GNSS hálózat fejlesztése a penci KGO-ban Horváth Tamás Rédey István Szeminárium, BME, 2004. november 17. Tartalom Háttér Abszolút GNSS helymeghatározás Standalone DGNSS és RTK referencia állomások
Aktív GNSS hálózat fejlesztése a penci KGO-ban Horváth Tamás Rédey István Szeminárium, BME, 2004. november 17. Tartalom Háttér Abszolút GNSS helymeghatározás Standalone DGNSS és RTK referencia állomások
Rádiófrekvenciás kommunikációs rendszerek
 Rádiófrekvenciás kommunikációs rendszerek Adó Adó Vevő Jellemzően broadcast adás (széles földrajzi terület besugárzása, TV, Rádió műsor adás) Adó Vevő Vevő Adó Különböző kommunikációs formák. Kis- és nagykapacitású
Rádiófrekvenciás kommunikációs rendszerek Adó Adó Vevő Jellemzően broadcast adás (széles földrajzi terület besugárzása, TV, Rádió műsor adás) Adó Vevő Vevő Adó Különböző kommunikációs formák. Kis- és nagykapacitású
Topcon Elit Mérőrenszer
 Topcon Elit Mérőrenszer Salgótarján, 2017. május 04. Navicom Plusz Bt. GT Robot Mérőállomás A VILÁG egyik LEGGYORSABB LEGKISEBB LEGKÖNNYEBB Robot mérőállomása. HiPer HR GNSS vevő KICSI, KÖNNYŰ, KOMPAKT
Topcon Elit Mérőrenszer Salgótarján, 2017. május 04. Navicom Plusz Bt. GT Robot Mérőállomás A VILÁG egyik LEGGYORSABB LEGKISEBB LEGKÖNNYEBB Robot mérőállomása. HiPer HR GNSS vevő KICSI, KÖNNYŰ, KOMPAKT
GNSS állapot-tér adatok előállítása és továbbítása
 GNSS állapot-tér adatok előállítása és továbbítása Horváth Tamás FÖMI Kozmikus Geodéziai Obszervatórium Tea előadás Penc, 2009. január 27. Tartalom Mérés-tér / Állapot-tér Az állapot-tér modellezés jellemzői
GNSS állapot-tér adatok előállítása és továbbítása Horváth Tamás FÖMI Kozmikus Geodéziai Obszervatórium Tea előadás Penc, 2009. január 27. Tartalom Mérés-tér / Állapot-tér Az állapot-tér modellezés jellemzői
Mire jó az RTKLIB? Az Alberding GmbH GNSS monitorozó megoldásai. Horváth Tamás. Alberding GmbH. Rédey István Geodéziai Szeminárium
 Horváth Tamás Mire jó az RTKLIB? 2016.04.29. 1/33 Mire jó az RTKLIB? Az Alberding GmbH GNSS monitorozó megoldásai Horváth Tamás Alberding GmbH Rédey István Geodéziai Szeminárium 2016. április 29., Budapest
Horváth Tamás Mire jó az RTKLIB? 2016.04.29. 1/33 Mire jó az RTKLIB? Az Alberding GmbH GNSS monitorozó megoldásai Horváth Tamás Alberding GmbH Rédey István Geodéziai Szeminárium 2016. április 29., Budapest
DAY 7. Ea.: Mudra István
 DAY 7 Ea.: Mudra István Kényszerhelyzeti tervezés (1) Tervezés: (SHALL!, nem mondja ki, milyen repülőtérre vonatkozik!) Doc9137 Part 7, képesség a helyzetekkel való megbirkózásra A résztvevők köre (példa):
DAY 7 Ea.: Mudra István Kényszerhelyzeti tervezés (1) Tervezés: (SHALL!, nem mondja ki, milyen repülőtérre vonatkozik!) Doc9137 Part 7, képesség a helyzetekkel való megbirkózásra A résztvevők köre (példa):
Vezetéknélküli technológia
 Vezetéknélküli technológia WiFi (Wireless Fidelity) 802.11 szabványt IEEE definiálta protokollként, 1997 Az ISO/OSI modell 1-2 rétege A sebesség függ: helyszíni viszonyok, zavarok, a titkosítás ki/be kapcsolása
Vezetéknélküli technológia WiFi (Wireless Fidelity) 802.11 szabványt IEEE definiálta protokollként, 1997 Az ISO/OSI modell 1-2 rétege A sebesség függ: helyszíni viszonyok, zavarok, a titkosítás ki/be kapcsolása
I. Telematikai rendszerek
 I. Telematikai rendszerek Telekommunikáció+Informatika=TeleMatika TRACKING & TRACING - áru és jármű nyomon követés, útvonaltervezés TRANSZPONDERES azonosítás veszélyes, romlandó áruk kezelése NAVIGÁCIÓ
I. Telematikai rendszerek Telekommunikáció+Informatika=TeleMatika TRACKING & TRACING - áru és jármű nyomon követés, útvonaltervezés TRANSZPONDERES azonosítás veszélyes, romlandó áruk kezelése NAVIGÁCIÓ
DIGITÁLIS AGRÁR STRATÉGIA. Munkaközi verzió 2016. május 10. Szakmai konzultációra
 DIGITÁLIS AGRÁR STRATÉGIA Munkaközi verzió 2016. május 10. Szakmai konzultációra 2016 Tartalomjegyzék 1 Vezetői összefoglaló... 3 2 Módszertan... 7 3 Az agrárium informatikai környezete, működő megoldások...
DIGITÁLIS AGRÁR STRATÉGIA Munkaközi verzió 2016. május 10. Szakmai konzultációra 2016 Tartalomjegyzék 1 Vezetői összefoglaló... 3 2 Módszertan... 7 3 Az agrárium informatikai környezete, működő megoldások...
A Tanács 95/93/EGK rendelete (1993. január 18.) a Közösség repülőterein alkalmazandó résidőkiosztás egységes szabályairól
 a Közösség repülőterein alkalmazandó résidőkiosztás egységes szabályairól") 1 1993 1. A Tanács 95/93/EGK rendelete (1993. január 18.) a Közösség repülőterein alkalmazandó résidőkiosztás egységes szabályairól o Az Európai Parlament és a Tanács 894/2002/EK rendelete (2002. május
1 1993 1. A Tanács 95/93/EGK rendelete (1993. január 18.) a Közösség repülőterein alkalmazandó résidőkiosztás egységes szabályairól o Az Európai Parlament és a Tanács 894/2002/EK rendelete (2002. május
Távoli irányítási rendszerek és fejlesztéseik
 Szepessy Kornél CEO Távoli irányítási rendszerek és fejlesztéseik RepülésVilág konferencia 2018. március 28. 1 REKORD FORGALOM Magyarország Koszovó (KFOR) 906 147 légijármű 2017-ben 810 243 Magyarország
Szepessy Kornél CEO Távoli irányítási rendszerek és fejlesztéseik RepülésVilág konferencia 2018. március 28. 1 REKORD FORGALOM Magyarország Koszovó (KFOR) 906 147 légijármű 2017-ben 810 243 Magyarország
HungaroControl Zrt. fejlesztései
 Somosi Vilmos KÜKO HungaroControl Zrt. fejlesztései Közlekedéstechnikai Napok BUDAPEST 2018. március 21. REKORD FORGALOM Magyarország Koszovó (KFOR) 906 147 légijármű 2017-ben 810 243 Magyarország légterében
Somosi Vilmos KÜKO HungaroControl Zrt. fejlesztései Közlekedéstechnikai Napok BUDAPEST 2018. március 21. REKORD FORGALOM Magyarország Koszovó (KFOR) 906 147 légijármű 2017-ben 810 243 Magyarország légterében
Agrár-környezetvédelmi Modul Agrár-környezetvédelem, agrotechnológia. KÖRNYEZETGAZDÁLKODÁSI MÉRNÖKI MSc TERMÉSZETVÉDELMI MÉRNÖKI MSc
 Agrár-környezetvédelmi Modul Agrár-környezetvédelem, agrotechnológia KÖRNYEZETGAZDÁLKODÁSI MÉRNÖKI MSc TERMÉSZETVÉDELMI MÉRNÖKI MSc Precíziós mezőgazdaság információ technológiai alapjai II. 138.lecke
Agrár-környezetvédelmi Modul Agrár-környezetvédelem, agrotechnológia KÖRNYEZETGAZDÁLKODÁSI MÉRNÖKI MSc TERMÉSZETVÉDELMI MÉRNÖKI MSc Precíziós mezőgazdaság információ technológiai alapjai II. 138.lecke
A Tanács 95/93/EGK rendelete (1993. január 18.) a Közösség repülőterein alkalmazandó résidőkiosztás egységes szabályairól
 a Közösség repülőterein alkalmazandó résidőkiosztás egységes szabályairól") 1 1993 1. A Tanács 95/93/EGK rendelete (1993. január 18.) a Közösség repülőterein alkalmazandó résidőkiosztás egységes szabályairól o Az Európai Parlament és a Tanács 894/2002/EK rendelete (2002. május
1 1993 1. A Tanács 95/93/EGK rendelete (1993. január 18.) a Közösség repülőterein alkalmazandó résidőkiosztás egységes szabályairól o Az Európai Parlament és a Tanács 894/2002/EK rendelete (2002. május
Adatkezelő szoftver. Továbbfejlesztett termékvizsgálat-felügyelet Fokozott minőség és gyártási hatékonyság
 Adatkezelő szoftver ProdX Inspect szoftver Fokozott termelékenység Páratlan termékminőség Magas fokú biztonság Teljesen átlátható folyamatok Továbbfejlesztett termékvizsgálat-felügyelet Fokozott minőség
Adatkezelő szoftver ProdX Inspect szoftver Fokozott termelékenység Páratlan termékminőség Magas fokú biztonság Teljesen átlátható folyamatok Továbbfejlesztett termékvizsgálat-felügyelet Fokozott minőség
7. előadás KJIT LÉGIR I.
 7. előadás KJIT LÉGIR I. A légiközlekedés játéktere A világ légiforgalmi rendszere Valamennyi ICAO tagállamnak kötelezettsége a légiforgalmi szolgáltatás valamely formájának biztosítása! AT Lower airspace
7. előadás KJIT LÉGIR I. A légiközlekedés játéktere A világ légiforgalmi rendszere Valamennyi ICAO tagállamnak kötelezettsége a légiforgalmi szolgáltatás valamely formájának biztosítása! AT Lower airspace
MOBIL ÉS VEZETÉK NÉLKÜLI
 MOBIL ÉS VEZETÉK NÉLKÜLI HÁLÓZATOK BMEVIHIMA07 1. gyakorlat Mobilitás-menedzsment, hívásátadás 2015. február 19., Budapest Knapp Ádám Tudományos segédmunkatárs BME Hálózati Rendszerek és Szolgáltatások
MOBIL ÉS VEZETÉK NÉLKÜLI HÁLÓZATOK BMEVIHIMA07 1. gyakorlat Mobilitás-menedzsment, hívásátadás 2015. február 19., Budapest Knapp Ádám Tudományos segédmunkatárs BME Hálózati Rendszerek és Szolgáltatások
PPP-RTK a hálózati RTK jövője?
 1 PPP-RTK a hálózati RTK jövője? Horváth Tamás FÖMI Kozmikus Geodéziai Obszervatórium Penc Rédey Szeminárium, BME, 006. április 6., Budapest Tartalom Emlékeztető Mérés-tér, állapot-tér PPP PPP-RTK Emlékeztető
1 PPP-RTK a hálózati RTK jövője? Horváth Tamás FÖMI Kozmikus Geodéziai Obszervatórium Penc Rédey Szeminárium, BME, 006. április 6., Budapest Tartalom Emlékeztető Mérés-tér, állapot-tér PPP PPP-RTK Emlékeztető
ADATÁTVITELI RENDSZEREK A GLOBÁLIS LOGISZTIKÁBAN
 9. ELŐADÁS ADATÁTVITELI RENDSZEREK A GLOBÁLIS LOGISZTIKÁBAN A logisztikai rendszerek irányításához szükség van az adatok továbbítására a rendszer különböző elemei között. Ezt a feladatot a különböző adatátviteli
9. ELŐADÁS ADATÁTVITELI RENDSZEREK A GLOBÁLIS LOGISZTIKÁBAN A logisztikai rendszerek irányításához szükség van az adatok továbbítására a rendszer különböző elemei között. Ezt a feladatot a különböző adatátviteli
Az LTE. és a HSPA lehetőségei. Cser Gábor Magyar Telekom/Rádiós hozzáférés tervezési ágazat
 Az LTE és a HSPA lehetőségei Cser Gábor Magyar Telekom/Rádiós hozzáférés tervezési ágazat Author / Presentation title 08/29/2007 1 Áttekintés Út az LTE felé Antennarendszerek (MIMO) Modulációk HSPA+ LTE
Az LTE és a HSPA lehetőségei Cser Gábor Magyar Telekom/Rádiós hozzáférés tervezési ágazat Author / Presentation title 08/29/2007 1 Áttekintés Út az LTE felé Antennarendszerek (MIMO) Modulációk HSPA+ LTE
Mőholdas helymeghatározás
 Mőholdas helymeghatározás Szatmári József Szegedi Tudományegyetem Természeti Földrajzi és Geoinformatikai Tanszék Tájékozódás a Földön Global Positioning System: a nagy ötlet Néhány alaptétel GPS vevık
Mőholdas helymeghatározás Szatmári József Szegedi Tudományegyetem Természeti Földrajzi és Geoinformatikai Tanszék Tájékozódás a Földön Global Positioning System: a nagy ötlet Néhány alaptétel GPS vevık
GNSSnet.hu. Akár cm-es pontosságú műholdas helymeghatározás bárhol az országban. Földmérési és Távérzékelési Intézet GNSS Szolgáltató Központ
 Akár cm-es pontosságú műholdas helymeghatározás bárhol az országban Földmérési és Távérzékelési Intézet GNSS Szolgáltató Központ Precíziós mezőgazdálkodás Automatikus munkagépvezérlés cm-es pontossággal
Akár cm-es pontosságú műholdas helymeghatározás bárhol az országban Földmérési és Távérzékelési Intézet GNSS Szolgáltató Központ Precíziós mezőgazdálkodás Automatikus munkagépvezérlés cm-es pontossággal
A GIPSY/OASIS szoftverről
 A GIPSY/OASIS szoftverről Horváth Tivadar földmérő mérnök TEA előadás 2014.09.23., Penc Tartalomjegyzék A GIPSY/OASIS szoftver Feldolgozás menete GIPSY kurzus beszámoló, Covilhã, Portugália GIPSY/OASIS
A GIPSY/OASIS szoftverről Horváth Tivadar földmérő mérnök TEA előadás 2014.09.23., Penc Tartalomjegyzék A GIPSY/OASIS szoftver Feldolgozás menete GIPSY kurzus beszámoló, Covilhã, Portugália GIPSY/OASIS
A fejlődés folytatódik
 ~ Szepessy Kornél vezérigazgató A fejlődés folytatódik Nemzeti Közlekedési Napok 2014. október 28. Elmúlt négy év eredményei ANS III projekt technikai-technológiai megújulás, MATIAS KFOR szektor megnyitása
~ Szepessy Kornél vezérigazgató A fejlődés folytatódik Nemzeti Közlekedési Napok 2014. október 28. Elmúlt négy év eredményei ANS III projekt technikai-technológiai megújulás, MATIAS KFOR szektor megnyitása
TÉRINFORMATIKA II. Dr. Kulcsár Balázs Ph.D. adjunktus. Debreceni Egyetem Műszaki Kar Műszaki Alaptárgyi Tanszék
 TÉRINFORMATIKA II. Dr. Kulcsár Balázs Ph.D. adjunktus Debreceni Egyetem Műszaki Kar Műszaki Alaptárgyi Tanszék ELSŐDLEGES ADATNYERÉSI ELJÁRÁSOK 1. Geodézia Fotogrammetria Mesterséges holdak GEOMETRIAI
TÉRINFORMATIKA II. Dr. Kulcsár Balázs Ph.D. adjunktus Debreceni Egyetem Műszaki Kar Műszaki Alaptárgyi Tanszék ELSŐDLEGES ADATNYERÉSI ELJÁRÁSOK 1. Geodézia Fotogrammetria Mesterséges holdak GEOMETRIAI
MIKOVINY SÁMUEL TÉRINFORMATIKAI EMLÉKVERSENY
 NYUGAT-MAGYARORSZÁGI EGYETEM GEOINFORMATIKAI KAR MIKOVINY SÁMUEL TÉRINFORMATIKAI EMLÉKVERSENY 2012/2013. TANÉV Az I. FORDULÓ FELADATAI NÉV:... Tudnivalók A feladatlap 4 feladatból áll, melyeket tetszőleges
NYUGAT-MAGYARORSZÁGI EGYETEM GEOINFORMATIKAI KAR MIKOVINY SÁMUEL TÉRINFORMATIKAI EMLÉKVERSENY 2012/2013. TANÉV Az I. FORDULÓ FELADATAI NÉV:... Tudnivalók A feladatlap 4 feladatból áll, melyeket tetszőleges
Irányító és kommunikációs rendszerek III. Előadás 13
 Irányító és kommunikációs rendszerek III. Előadás 13 GSM-R Flottamenedzsment Mobil fizetési lehetőségek Parkolási díj Útdíj A GSM közlekedési felhasználása Valós idejű információs szolgáltatás Közlekedési
Irányító és kommunikációs rendszerek III. Előadás 13 GSM-R Flottamenedzsment Mobil fizetési lehetőségek Parkolási díj Útdíj A GSM közlekedési felhasználása Valós idejű információs szolgáltatás Közlekedési
Intelligens közlekedési rendszer alkalmazásokkal a közlekedésbiztonság javításáért
 Új évtized, új kihívások a közlekedésbiztonságban közúti közlekedésbiztonsági konferencia Intelligens közlekedési rendszer alkalmazásokkal a közlekedésbiztonság javításáért Szűcs Lajos elnök ITS Hungary
Új évtized, új kihívások a közlekedésbiztonságban közúti közlekedésbiztonsági konferencia Intelligens közlekedési rendszer alkalmazásokkal a közlekedésbiztonság javításáért Szűcs Lajos elnök ITS Hungary
A GNSS Szolgáltató Központ 2009-ben www.gnssnet.hu. Galambos István FÖMI Kozmikus Geodéziai Obszervatórium
 A GNSS Szolgáltató Központ 2009-ben www.gnssnet.hu Galambos István FÖMI Kozmikus Geodéziai Obszervatórium Tartalom: A FÖMI GNSSnet.hu hálózata 2008 év végén Modernizáció a hálózatban 2009-ben A szolgáltatások
A GNSS Szolgáltató Központ 2009-ben www.gnssnet.hu Galambos István FÖMI Kozmikus Geodéziai Obszervatórium Tartalom: A FÖMI GNSSnet.hu hálózata 2008 év végén Modernizáció a hálózatban 2009-ben A szolgáltatások
Érsek Ákos. GPSCOM Kft.
 ASHTECH mobil térinformatikai adatgyűjtők HUNAGI 3.MobilGIS konferencia 2012, Budapest Érsek Ákos 1 GPSCOM Kft. Alaptérkép felvétel a ProMark800 készülékkel Az legújabb GNSS centrikus vevő amely képes
ASHTECH mobil térinformatikai adatgyűjtők HUNAGI 3.MobilGIS konferencia 2012, Budapest Érsek Ákos 1 GPSCOM Kft. Alaptérkép felvétel a ProMark800 készülékkel Az legújabb GNSS centrikus vevő amely képes
Ethernet OAM a szolgáltatói hálózatokban
 Ethernet OAM a szolgáltatói hálózatokban Szabó János Magyar Telekom Nyrt., PKI Fejlesztési Igazgatóság 16. Távközlési és Informatikai Hálózatok Szeminárium és Kiállítás 1 Ethernet a szolgáltatói hálózatban
Ethernet OAM a szolgáltatói hálózatokban Szabó János Magyar Telekom Nyrt., PKI Fejlesztési Igazgatóság 16. Távközlési és Informatikai Hálózatok Szeminárium és Kiállítás 1 Ethernet a szolgáltatói hálózatban
Kooperatív Rendszerek - Huwico konferencia, 2005 április 9.
 Kooperatív endszerek - Huwico konferencia, 2005 április 9. A Kooperativ kommunikáció lényege és megvalósítási terve Kovács András Tartalom 1. Mit takar a Kooperatív Kommunikáció? Ma már természetes, hogy
Kooperatív endszerek - Huwico konferencia, 2005 április 9. A Kooperativ kommunikáció lényege és megvalósítási terve Kovács András Tartalom 1. Mit takar a Kooperatív Kommunikáció? Ma már természetes, hogy
MERRE? TOVÁBB! MŰHOLDAS NAVIGÁCIÓ!
 MERRE? TOVÁBB! MŰHOLDAS NAVIGÁCIÓ! Urbán István százados egyetemi tanársegéd Zrínyi Miklós Nemzetvédelmi Egyetem Hadtudományi Kar Repülő tanszék Az ICAO megalakulása óta mindig nagy óvatossággal kezelte
MERRE? TOVÁBB! MŰHOLDAS NAVIGÁCIÓ! Urbán István százados egyetemi tanársegéd Zrínyi Miklós Nemzetvédelmi Egyetem Hadtudományi Kar Repülő tanszék Az ICAO megalakulása óta mindig nagy óvatossággal kezelte
INFORMATIKA ÁGAZATI ALKALMAZÁSAI. Az Agrármérnöki MSc szak tananyagfejlesztése TÁMOP /1/A
 INFORMATIKA ÁGAZATI ALKALMAZÁSAI Az Agrármérnöki MSc szak tananyagfejlesztése TÁMOP-4.1.2-08/1/A-2009-0010 11. Globális helymeghatározás pontosító rendszerei Pontosságot befolyásoló tényezők Differenciális
INFORMATIKA ÁGAZATI ALKALMAZÁSAI Az Agrármérnöki MSc szak tananyagfejlesztése TÁMOP-4.1.2-08/1/A-2009-0010 11. Globális helymeghatározás pontosító rendszerei Pontosságot befolyásoló tényezők Differenciális
9. Előadás KJIT, Légir I.
 9. Előadás KJIT, Légir I. Miért is beszélünk a FLOW Man t-ről? Európai központi áramlásszervezés PRC jelentés, 2014 május A repülési fázisok avagy a G2G concept Repülések tervezése Mindenek alapja: az
9. Előadás KJIT, Légir I. Miért is beszélünk a FLOW Man t-ről? Európai központi áramlásszervezés PRC jelentés, 2014 május A repülési fázisok avagy a G2G concept Repülések tervezése Mindenek alapja: az
BT-R820 Használati utasítás BT-R820 Wireless GPS Egység Használati utasítás Dátum: Szeptember, 2006 Verzió: 1.1
 BT-R820 Wireless GPS Egység Használati utasítás Dátum: Szeptember, 2006 Verzió: 1.1 1. oldal TARTALOMJEGYZÉK 0. Gyors telepítés...3 1. Bevezetés...4 1.1 Áttekintés...4 1.2 Fő jellemzők...4 1.3 Alkalmazási
BT-R820 Wireless GPS Egység Használati utasítás Dátum: Szeptember, 2006 Verzió: 1.1 1. oldal TARTALOMJEGYZÉK 0. Gyors telepítés...3 1. Bevezetés...4 1.1 Áttekintés...4 1.2 Fő jellemzők...4 1.3 Alkalmazási
Rádióalkalmazási Táblázat
 1. melléklet a /2011. (....) NMHH rendelethez Rádióalkalmazási Táblázat Frekvenciasávok és rádiószolgálatok Rádióalkalmazások Nemzetközi és hazai ok Speciális feltételek, egyedi követelmények 9 khz alatt
1. melléklet a /2011. (....) NMHH rendelethez Rádióalkalmazási Táblázat Frekvenciasávok és rádiószolgálatok Rádióalkalmazások Nemzetközi és hazai ok Speciális feltételek, egyedi követelmények 9 khz alatt
Az európai EGNOS rendszer. European Geostationary Navigation Overlay Service
 LirKom II 5. ea. Az európai EGNOS rendszer European Geostationary Navigation Overlay Service Artemis Az EGNOS űrszegmensét alkotó műholdak (1 Artemis +2 Inmarsat) Inmarsat A működő SBAS rendszerek SDCM
LirKom II 5. ea. Az európai EGNOS rendszer European Geostationary Navigation Overlay Service Artemis Az EGNOS űrszegmensét alkotó műholdak (1 Artemis +2 Inmarsat) Inmarsat A működő SBAS rendszerek SDCM
VIII. függelék a Légiműveletekről - OPS szóló Bizottsági Rendelet-tervezethez. SPO IR rész
 Európai Repülésbiztonsági Ügynökség 2012. április 16. VIII. függelék a Légiműveletekről - OPS szóló Bizottsági Rendelet-tervezethez SPO IR rész R.F010-02 Európai Repülésbiztonsági Ügynökség, 2012. Minden
Európai Repülésbiztonsági Ügynökség 2012. április 16. VIII. függelék a Légiműveletekről - OPS szóló Bizottsági Rendelet-tervezethez SPO IR rész R.F010-02 Európai Repülésbiztonsági Ügynökség, 2012. Minden
Antennatervező szoftverek. Ludvig Ottó - HA5OT
 Antennatervező szoftverek Ludvig Ottó - HA5OT Miről lesz szó? Megismerkedünk a számítógépes antenna modellezés alapjaival, és történetével Gyakorlati példákon keresztül elsajátítjuk az alapvető fogásokat
Antennatervező szoftverek Ludvig Ottó - HA5OT Miről lesz szó? Megismerkedünk a számítógépes antenna modellezés alapjaival, és történetével Gyakorlati példákon keresztül elsajátítjuk az alapvető fogásokat
V2I - Infrastruktúra
 V2I - Infrastruktúra Intelligens közlekedési rendszerek VITMMA10 Okos város MSc mellékspecializáció Simon Csaba ITS hálózat az infrastruktúra oldal ITS hálózat (ism) V2V OBU On Board Unit Ad hoc hálózat
V2I - Infrastruktúra Intelligens közlekedési rendszerek VITMMA10 Okos város MSc mellékspecializáció Simon Csaba ITS hálózat az infrastruktúra oldal ITS hálózat (ism) V2V OBU On Board Unit Ad hoc hálózat
közelnavigációs és a leszállító rádiólokációs rendszerek.
 Közelnavigációs és leszállító rádiónavigációs rendszerek Dr. Seres György mérnök alezredes, a hadtudomány (haditechnika) kandidátusa 1. ábra; Repülőtér körzeti diszpécser rádiólokátor-állomás 1 - körfelderítő
Közelnavigációs és leszállító rádiónavigációs rendszerek Dr. Seres György mérnök alezredes, a hadtudomány (haditechnika) kandidátusa 1. ábra; Repülőtér körzeti diszpécser rádiólokátor-állomás 1 - körfelderítő