Járműinformatika. 2. Óra. Kőrös Péter
|
|
|
- Ildikó Lakatos
- 6 évvel ezelőtt
- Látták:
Átírás
1 Járműinformatika 2. Óra Kőrös Péter
2 LIN- és más szub-busz rendszerek (K- és L-line, KWP 2000) LIN (Local Interconnect Network) Konzorciumi fejlesztés Komfort- és a karosszéria-elektronika számára Lopásvédelem, fényszórók elektronikája, klíma, ajtó zárás stb. Kis sebességű Egy vezetékes! UART alapok (Univerzális aszinkron adóvevő) Korlátozott fizikai méret (max. 40m) CAN busz illeszthető, GateWayeken keresztül
3 LIN- és más szub-busz rendszerek (K- és L-line, KWP 2000) LIN v2.0 protokoll jellemzői Single Master / Multiple Slave Idővezérelt Hardver és Szoftver igények alacsony költségűek Automatikus szinkronizáció (Üzeneteken keresztül, önszinkronizációs folyamat) Meghatározott jelátvitel Átviteli sebesség: maximum 20 kbit/s Maximum 16 vezérlőegység (1 Master, 15 Slave, ID-k: 0-Master, 1 15-Slavek)
 LIN Slave N (max.")
4 LIN- és más szub-busz rendszerek (K- és L-line, KWP 2000) Diagnosztikai Interfész (GateWay) LIN Master LIN Slave 1 LIN Slave 2 Diagnosztikai csatlakozó (OBD csatlakozó) LIN Slave N (max. 15)
5 LIN- és más szub-busz rendszerek (K- és L-line, KWP 2000) LIN rendszer vezérlése Kérdés-válasz metódus (Master-Slave) Címzett kérdés, így csak vezérlőegység válaszol Sleep üzemmód, ébreszteni minden vezérlőegység tud Hibás Slave detektálás egyszerű (Nincs válasz adatterület)
6 LIN- és más szub-busz rendszerek (K- és L-line, KWP 2000) Üzenet-keret slot Üzenet-keret (Frame) Válasz köz Üzenetek közötti szünetek Szinkronizálási szünet Szinkronizáció Azonosító Adatmező 1 Adatmező N Checksum Üzenetfej Válasz
7 LIN- és más szub-busz rendszerek (K- és L-line, KWP 2000) LIN üzenet Header: Szinkronizációs szünet: 13 domináns bit (12 bit domináns - 0 V, 1 bit recesszív - tápfeszültség) Szinkronizáció: 8 bit (domináns és recesszív váltakozás) Azonosító mező: 10 bit (vezérlő és üzenet azonosítója) Response: Adatmező(k): Legfeljebb 8 Byte (1 startbit, 8 adatbit, 1 stopbit, azaz 10 bit) CRC szakasz: függ az üzenet adatterületének hosszától


8 LIN- és más szub-busz rendszerek (K- és L-line, KWP 2000) LIN üzenet oszcilloszkóp képe Forrás: Domináns bit: Maximum 40%-a a tápfeszültségnek! Recesszív bit: Minimum 60%-a a tápfeszültségnek! /ssp/ssp_286_d1.pdf
9 LIN- és más szub-busz rendszerek (K- és L-line, KWP 2000) K-line: Szabványosítva 1989, diagnosztikai célok Kétirányú, egyvezetékes, 10.4 kbit/s L-line: Egyvezetékes, egyirányú, csak indítási fázisban alkalmazott KWP 2000: K-line + amerikai ODB szabvány -> KWP 2000 (diagnosztika)
10 MOST buszrendszer (Media Oriented Systems Transport) Főbb jellemzők ISO/OSI modell mind a hét szintjét megvalósítja 25 illetve 50 Mb/s (150 Mb/s + kiegészítő aszinkron vezérlőcsatorna 700 kbit/s, TDMA Time Division Multiple Access) Egy egységhez egy cím tartozik (küldő és fogadó címként is alkalmazzák) Optikai kábel (vagy csavart érpár) Gyűrű, csillag, fa struktúra egyaránt használható (gyűrű az elterjedt) Maximum 64 db vezérlőegység Timing Master vezérlőegység folyamatosan küldi a szinkron üzeneteket Hang- és képátvitel valósidejű működtetése lehetséges Hibafelismerés beépített

11 2003-as Audi A8 MOST busz adatátviteli rátái alkalmazás szerint csoportosítva Forrás: ssp/ssp/ssp_286_d1.pdf
12 MOST buszrendszer (Media Oriented Systems Transport) Master egység Telematika Gyakran a vezérlő és kijelző egység egyben a MOST busz Master csomópontja is ID-ja mindig a 0 Slave egységek Időszinkronizálás Adatok küldése, ha a master megcímezte őket CD-tár Információs vezérlőegység Diagnosztikai interfész (GateWay) Kijelző Kezelő egység Kártyaolvasó TV-tuner Rádió-tuner Beszéd kezelő Erősítő GPS
13 MOST buszrendszer (Media Oriented Systems Transport) Optikai jel Optikai szálas Transceiver (FOT Fibre Optical Transmitter) Elektromos jel MOST kommunikációs vezérlő Szinkron adatok Audio/video eszközök Mikrovezérlő MOST vezérlőegység tipikus felépítése

14 Forrás: ssp/ssp/ssp_286_d1.pdf


15 MOST buszrendszer (Media Oriented Systems Transport) Optikai kábelek Színes köpeny Fekete köpeny Üvegszálú kábel: Kisebb veszteség, nagyon vékony, fizikai behatásokkal szemben kevésbé ellenálló Műanyagszálas kábelek (POF Plastics Optical Fiber): Magrész: polimetil-metakrilát Transzparens réteg: fluorpolimer Fekete köpeny Színes, mechanikai védelmet nyújtó műanyag köpeny Reflexiós réteg Mag

16 MOST buszrendszer (Media Oriented Systems Transport) Optikai kábelek tulajdonságai A fénysugár egy részét egyenesen továbbítja az optikai szál. A fénysugár nagyobb része a teljes reflexiót kihasználva fog továbbhaladni.
 Hajlítás sugarának adott értéknél nagyobbnak kell lennie (teljes reflexió érvényesülhessen) Mechanikai")
17 MOST buszrendszer (Media Oriented Systems Transport) Optikai kábelek alkalmazásának korlátai, követelményei Optikai vezetékek végének védelme (porvédő sapka) Hajlítás sugarának adott értéknél nagyobbnak kell lennie (teljes reflexió érvényesülhessen) Mechanikai védelem
18 MOST üzenetek formátuma Teljes sávszélesség kommunikációs ciklusokra (Frame) van felosztva 16 frame képez egy blokkot 363 μs 22,6 μs 22,67 μs Header (1 Byte) Szinkron (24-60 Byte) Aszinkron (36-0 Byte) CRC (2 Byte) Trailer (7 Byte) MOST 25 Adatmező 64 Byte 22,67 μs Header (7 Byte) CRC (4 Byte) Szinkron (1-117 Byte) Aszinkron (116-0 Byte) MOST 50 Adatmező 128 Byte
19 MOST buszrendszer (Media Oriented Systems Transport) Aszinkron adatok Arbitrálási elv A küldő nem kap visszajelzést, ha a MASTER nem fogadja az üzenetet (nincs ismétlés a küldő részéről) Vezérlő csatorna MOST Byte, MOST Byte Van nyugtázás (ACK jel) Sleep üzemmód Master ébreszthet (ébreszthet csak egy slave-t is) Stand-by állapot (pl. indításkor)
20 D2B, Bluetooth D2B MOST busz elődje, Philips cég fejlesztette, nem terjedt el (Max. 1 Mbit/s) Csak multimédiás célok Később száloptika alkalmazása (5,65 Mbit/s) Max. 6 vezérlőegység Max. 10 m hossz IT által használt protokoll Kényelmi és multimédiás célok
21 FlexRay Konzorciumi fejlesztés BMW, VW, Daimler AG, GM, Bosch, NXP Semiconductors, Freescale 2009 v3.0 (végleges protokoll) Megjelenés az autókban Audi A8 (2011) Nagy adatátviteli sebesség (csatornánként 10Mbit/s) Biztonságkritikus vezérlés követelményeit teljesíti Két független csatorna Nem csak autóipari alkalmazások BMW X5 BMW X6 Jogi kérdések (X-by-Wire rendszerek) BMW 7 BMW 5 BMW 5 GT Rolls Roys Ghost
22 FlexRay hálózatok tulajdonságai Gyors, determinisztikus és hibatűrő rendszer (nincs arbitráció) Autóipar generálta a hálózat létrejöttét (X-by-wire rendszerek) Két csatornás működés, egyenként 10 Mbit/s-os sebességgel. Általában a két csatornát ugyanarra a célra használják, így valósítják meg a hardver redundanciát. A kommunikációs ciklus felosztható statikus és dinamikus időszeletekre. A statikus rész vezérlőegységekhez vannak rendelve, míg a dinamikus rész a fent maradó sávszélességen akár multimédiás célokat is ki tud elégíteni. Idővezérelt elven működik, amely biztosítja a küldött és fogadott információk sérthetetlenségét, de szervezésbeli nehézséget is okoz.
 Csillag Aktív")

23 FlexRay hálózatok topológiája Két alapvető topológia Vonalas (Busz) Csillag Aktív csillagpontban maximum 16 ág lehet Sorosan kapcsolt csillagok száma maximum 3 db lehet Hibrid topológiák a két csatorna miatt
 Kábel árnyékolt és árnyékolatlan is")
24 FlexRay hálózatok vezetékezése, csatlkaozói Két csavart érpár (1-1 csatorna) Fizikai végpontokon lezáró ellenállás (gyakorlatban két 100 Ohm-os ellenállás) Kábel árnyékolt és árnyékolatlan is lehet
25 FlexRay vezérlő blokkvázlat Host: Közli a buszvédelemmel, hogy melyik időköz van számára lefoglalva, adatokat közöl. Communication Controller: A hálózat paramétereit tartatja be, megvalósítja az adott protokollt (több száz szabály). Bus Guardian: Biztosítja, hogy a vezérlő az ő számára biztosított időkeretben küldhessen adatot a hálózatra. Bus Driver: Adatokat küld a buszra.
26 FlexRay hálózat adatreprezentációja Idle_LP (Low Power) Idle Data_1: pozitív feszültségkülönbség Data_0: negatív feszültségkülönbség 3 2,5 2

27 FlexRay vezérlő állapotgépe Halt: komolyabb hiba észlelésekor Config: kommunikációs controller inicializálása és konfigurálása Normal active: hibamentes működés Normal passive: csak üzenetek fogadása, küldés nem lehetséges (órajelszinkronizáció szükséges)

28 FlexRay kommunikációs ciklus

29 FlexRay kommunikációs ciklus Static Segment: Biztonságkritikus, valósidejű vezérlést kiszolgáló adatterületek (nem mindenképp redundáns adat A és B csatornán). Dynamic Segment: Meghatározott nagyságú adatterüet, nem biztonságkritikus. Symbol Window: Belső vezérlési információk. Network Idle Time: Helyi óraidő igazítása, hossza rögzített!

30 FlexRay Frame (keret)

31 FlexRay hálózat indítási mechanizmusa

32 CAN protokoll Controller Area Network Új információk továbbításához csak szoftver változtatás szükséges (üzenetek definiálása). Az adatprotokoll többszörösen is biztosítva van a kommunikációs hibák ellen. Pl.: ellenőrző összegek, bitek stb. Kevesebb szenzor és jelvezeték 2 vezérlő közötti nagyon gyors adatcsere (max. 1 Mbit/s) Kis helyigény, vezeték, vezérlő és csatlakozás A CAN protokoll véglegesítése (BOSCH, 1991 v2.0)
33 CAN - Történet 1983 CAN Fejlesztés kezdete a Bosch-nál 1985 (Full-) Teljes CAN-Specifikáció (kooperáció az Intellel) 1987 Az első szilikon az Intel-től 1988 Szériatípus az Intel-től (82C526) 1988 Basic-CAN a Philips-től (82C200) 1991 Végleges v2.0 specifikáció
34 Controllerek száma Mio CAN Controllers Középkategóriás autókban jelenleg körülbelül 80 CAN vezérlőegység található meg (felsőkategóriában ez a szám 120db is lehet) ra kb. duplájára fog emelkedni ez a szám (lehet hogy a CAN vezérlők kárára pl. FlexRay vezérlőegységek)
35 CAN busz Multi-Master Busz, azaz minden egység egymástól függetlenül adhat. Adatátvitel 100 KBit/s (Low Speed, Komfort-CAN, Info-CAN) és 500 KBit/s (High Speed) Low Speed-CAN esetén egyvezetékes mód is lehetséges. Magas zavarvédettség, kis meghibásodási ráta

36 CAN vezérlőegység Controller: Előkészíti az adatokat a küldés számára, illetve a kapott adatokat alakítja át a vezérlő számára. Transceiver: Elküldi elektromos jelként a Controller által előkészített adatokat az adatbuszon, valamint fogadja is őket. 2 adatbusz lezárás (120 Ohm, esetleg kapacitással) 2 adatvezeték (általában egy alapszín, mellette fehér-alapszín vezeték vagy narancs alapszín zöld és barna csíkkal)
37 Reflexió Jelalak A csomóponttól A Reflekxiós jel R>Z R<Z Reflexiós jel felfutási ideje R>Z Megjelenő jel a hálózaton R<Z
 A-oszlop bal")

38 CAN hálózatok az autóban (2003-as Audi A3) A-oszlop bal oldalon: CAN - Hajtás A-oszlop jobb oldalon: CAN - Komfort CAN Információs

39 Adatátvitel folyamata Adatok előkészítése Az adatok előkészítését a CAN-Controller végzi. Adatok küldése Az adatokat a CAN- Transceiver küldi (és fogadja). Adatok fogadása Minden más vezérlő fogadja a buszon küldött adatokat. Adatok vizsgálata A vezérlő megvizsgálja, hogy a kapott adatok kellenek-e a működéséhez. Adatok átvétele Ha az adatok a vezérlőegységhez tartoznak, akkor átvételre kerülnek.
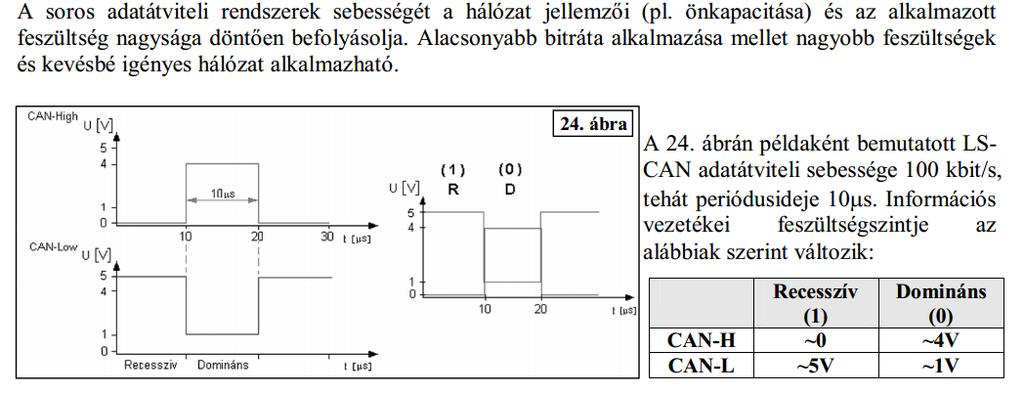
40 Feszültségszintek a CAN buszon
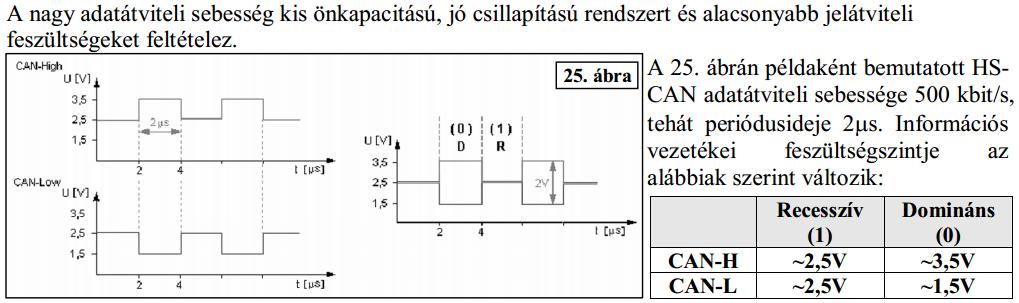
41 Feszültségszintek a CAN buszon

42 Feszültségszintek a CAN buszon

43 Data-Frame 11- és 29-Bit azonosítóval (CAN v2.0 A vagy B mód)

44 Üzenetfajták DATA FRAME Adattartalmú üzenetek átvitele REMOTE FRAME Adattartalmú üzenetek igénye ERROR FRAME Hibaüzenetek OVERLOAD FRAME Túlterheltséget jelző üzenet

45 Standard Frame

46 Standard Frame

47 Standard Frame
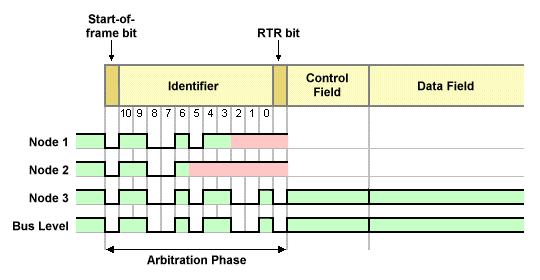
48 Arbitráció
49 Köszönöm a figyelmet!
Járműinformatika Multimédiás buszrendszerek (MOST, D2B és Bluetooth) 4. Óra
 4. Óra") Járműinformatika Multimédiás buszrendszerek (MOST, D2B és Bluetooth) 4. Óra Multimédiás adatok továbbítása és annak céljai Mozgókép és hang átvitele Szórakoztató elektronika Biztonsági funkciókat megvalósító
Járműinformatika Multimédiás buszrendszerek (MOST, D2B és Bluetooth) 4. Óra Multimédiás adatok továbbítása és annak céljai Mozgókép és hang átvitele Szórakoztató elektronika Biztonsági funkciókat megvalósító
Járműinformatika bevezetés. 1. Óra
 Járműinformatika bevezetés 1. Óra Ajánlott irodalom Gépjárművek buszhálózatai Dr. Kováts Miklós, Dr. Szalay Zsolt (ISBN 978-963-9945-10-4) Multiplexed Networks for Embedded Systems Dominique Paret (ISBN
Járműinformatika bevezetés 1. Óra Ajánlott irodalom Gépjárművek buszhálózatai Dr. Kováts Miklós, Dr. Szalay Zsolt (ISBN 978-963-9945-10-4) Multiplexed Networks for Embedded Systems Dominique Paret (ISBN
Járműfedélzeti rendszerek II. 8. előadás Dr. Bécsi Tamás
 Járműfedélzeti rendszerek II. 8. előadás Dr. Bécsi Tamás A FlexRay hálózat Kifejlesztésének célja: alacsony költségen, nagy megbízhatóságú, nagy teljesítményű adatátvitel járműipari környezetben. A specifikációt
Járműfedélzeti rendszerek II. 8. előadás Dr. Bécsi Tamás A FlexRay hálózat Kifejlesztésének célja: alacsony költségen, nagy megbízhatóságú, nagy teljesítményű adatátvitel járműipari környezetben. A specifikációt
Programozható vezérlő rendszerek KOMMUNIKÁCIÓS HÁLÓZATOK 2.
 KOMMUNIKÁCIÓS HÁLÓZATOK 2. CAN busz - Autóipari alkalmazásokhoz fejlesztették a 80-as években - Elsőként a BOSCH vállalat fejlesztette - 1993-ban szabvány (ISO 11898: 1993) - Később fokozatosan az iparban
KOMMUNIKÁCIÓS HÁLÓZATOK 2. CAN busz - Autóipari alkalmazásokhoz fejlesztették a 80-as években - Elsőként a BOSCH vállalat fejlesztette - 1993-ban szabvány (ISO 11898: 1993) - Később fokozatosan az iparban
Autóipari beágyazott rendszerek. Local Interconnection Network
 Autóipari beágyazott rendszerek Local Interconnection Network 1 Áttekintés Motiváció Kis sebességigényű alkalmazások A CAN drága Kvarc oszcillátort igényel Speciális perifériát igényel Két vezetéket igényel
Autóipari beágyazott rendszerek Local Interconnection Network 1 Áttekintés Motiváció Kis sebességigényű alkalmazások A CAN drága Kvarc oszcillátort igényel Speciális perifériát igényel Két vezetéket igényel
Autóipari beágyazott rendszerek. A kommunikáció alapjai
 Autóipari beágyazott rendszerek A kommunikáció alapjai 1 Alapfogalmak Hálózati kommunikáció Vezérlőegységek közötti információ továbbítás Csomópontok Kommunikációs csatornákon keresztül Terepbuszok (cluster)
Autóipari beágyazott rendszerek A kommunikáció alapjai 1 Alapfogalmak Hálózati kommunikáció Vezérlőegységek közötti információ továbbítás Csomópontok Kommunikációs csatornákon keresztül Terepbuszok (cluster)
Járműfedélzeti rendszerek II. 6. előadás Dr. Bécsi Tamás
 Járműfedélzeti rendszerek II. 6. előadás Dr. Bécsi Tamás A CAN hálózat Az első szabványos autóipari kommunikációs hálózat Bosch fejlesztés, 1986 SAE (Society of Automotive Engineers) congress 1991 CAN
Járműfedélzeti rendszerek II. 6. előadás Dr. Bécsi Tamás A CAN hálózat Az első szabványos autóipari kommunikációs hálózat Bosch fejlesztés, 1986 SAE (Society of Automotive Engineers) congress 1991 CAN
Járműfedélzeti hálózatok. Fedélzeti diagnosztikai protokollok Dr. Aradi Szilárd
 Járműfedélzeti hálózatok Fedélzeti diagnosztikai protokollok Dr. Aradi Szilárd A fedélzeti diagnosztika fogalma On-Board Diagnostics (OBD I-II, EOBD) Motiváció Általánosságban információt szolgáltat a
Járműfedélzeti hálózatok Fedélzeti diagnosztikai protokollok Dr. Aradi Szilárd A fedélzeti diagnosztika fogalma On-Board Diagnostics (OBD I-II, EOBD) Motiváció Általánosságban információt szolgáltat a
Rendszertervezés házi feladat
 Budapesti Műszaki- és Gazdaságtudományi Egyetem Villamosmérnöki és Informatikai Kar Méréstechnika és Információs Rendszerek Tanszék Rendszertervezés házi feladat Autós Body rendszer tervezése Bartakovics
Budapesti Műszaki- és Gazdaságtudományi Egyetem Villamosmérnöki és Informatikai Kar Méréstechnika és Információs Rendszerek Tanszék Rendszertervezés házi feladat Autós Body rendszer tervezése Bartakovics
Járműfedélzeti kommunikáció. Controller Area Network Dr. Aradi Szilárd
 Járműfedélzeti kommunikáció Controller Area Network Dr. Aradi Szilárd A CAN hálózat Az első szabványos autóipari kommunikációs hálózat Bosch fejlesztés, 1986 SAE (Society of Automotive Engineers) congress
Járműfedélzeti kommunikáció Controller Area Network Dr. Aradi Szilárd A CAN hálózat Az első szabványos autóipari kommunikációs hálózat Bosch fejlesztés, 1986 SAE (Society of Automotive Engineers) congress
I+K technológiák. Buszrendszerek Dr. Aradi Szilárd
 I+K technológiák Buszrendszerek Dr. Aradi Szilárd TIA/EIA-485-A (RS-485) Az RS-485 szabványt 1983-ban jelentette meg az EIA, és a szabvány legutolsó felülvizsgálata 1998-ban történt Az automatizálástechnikában
I+K technológiák Buszrendszerek Dr. Aradi Szilárd TIA/EIA-485-A (RS-485) Az RS-485 szabványt 1983-ban jelentette meg az EIA, és a szabvány legutolsó felülvizsgálata 1998-ban történt Az automatizálástechnikában
I+K technológiák. Beágyazott rendszerek 3. előadás Dr. Aradi Szilárd
 I+K technológiák Beágyazott rendszerek 3. előadás Dr. Aradi Szilárd LIN (Local Interconnect Network) kommunikációs hálózat 1980-as években jelentek meg az UART alapú soros megoldások a gépjárművekben,
I+K technológiák Beágyazott rendszerek 3. előadás Dr. Aradi Szilárd LIN (Local Interconnect Network) kommunikációs hálózat 1980-as években jelentek meg az UART alapú soros megoldások a gépjárművekben,
2. lecke: Gépjárművek világító- és jelzőberendezései
 2. lecke: Gépjárművek világító- és jelzőberendezései Cél: A tananyag célja, hogy a hallgató ismerje meg a járművek világító- és jelzőberendezéseit. Legyen tisztában a működésükkel, vonatkozó jogszabályokkal.
2. lecke: Gépjárművek világító- és jelzőberendezései Cél: A tananyag célja, hogy a hallgató ismerje meg a járművek világító- és jelzőberendezéseit. Legyen tisztában a működésükkel, vonatkozó jogszabályokkal.
Járműinformatika bevezetés II. 2. Óra
 Járműinformatika bevezetés II. 2. Óra Járműves buszrendszerek osztályozása Alaprendszerek: SubBus: CAN (High-Speed, Low-Speed) SAE J1567 (C 2 D), SAE J1850 (PWM) SAE J1850 (PWM) VAN Nagysebeségű / Valós
Járműinformatika bevezetés II. 2. Óra Járműves buszrendszerek osztályozása Alaprendszerek: SubBus: CAN (High-Speed, Low-Speed) SAE J1567 (C 2 D), SAE J1850 (PWM) SAE J1850 (PWM) VAN Nagysebeségű / Valós
A CAN mint ipari kommunikációs protokoll CAN as industrial communication protocol
 A CAN mint ipari kommunikációs protokoll CAN as industrial communication protocol Attila FODOR 1), Dénes FODOR Dr. 1), Károly Bíró Dr. 2), Loránd Szabó Dr. 2) 1) Pannon Egyetem, H-8200 Veszprém Egyetem
A CAN mint ipari kommunikációs protokoll CAN as industrial communication protocol Attila FODOR 1), Dénes FODOR Dr. 1), Károly Bíró Dr. 2), Loránd Szabó Dr. 2) 1) Pannon Egyetem, H-8200 Veszprém Egyetem
Autóipari beágyazott rendszerek CAN hardver
 Scherer Balázs, Tóth Csaba: Autóipari beágyazott rendszerek CAN hardver Előadásvázlat Kézirat Csak belső használatra! 2012.02.19. SchB, TCs BME MIT 2012. Csak belső használatra! Autóipari beágyazott rendszerek
Scherer Balázs, Tóth Csaba: Autóipari beágyazott rendszerek CAN hardver Előadásvázlat Kézirat Csak belső használatra! 2012.02.19. SchB, TCs BME MIT 2012. Csak belső használatra! Autóipari beágyazott rendszerek
Autóipari beágyazott rendszerek. FlexRay
 Autóipari beágyazott rendszerek FlexRay 1 Történet A FlexRay konzorcium fejlesztette Freescale, Bosch, NXP, BMW, VW, Daimler, GM Ma már ISO szabvány Főbb igények A CAN és LIN protokolloknál nagyobb sávszélesség
Autóipari beágyazott rendszerek FlexRay 1 Történet A FlexRay konzorcium fejlesztette Freescale, Bosch, NXP, BMW, VW, Daimler, GM Ma már ISO szabvány Főbb igények A CAN és LIN protokolloknál nagyobb sávszélesség
Járműfedélzeti kommunikáció. Dr. Aradi Szilárd
 Járműfedélzeti kommunikáció Dr. Aradi Szilárd LIN (Local Interconnect Network) kommunikációs hálózat 1980-as években jelentek meg az UART alapú soros megoldások a gépjárművekben, Gyors elterjedés < alacsony
Járműfedélzeti kommunikáció Dr. Aradi Szilárd LIN (Local Interconnect Network) kommunikációs hálózat 1980-as években jelentek meg az UART alapú soros megoldások a gépjárművekben, Gyors elterjedés < alacsony
Járműfedélzeti rendszerek II. 6. előadás Dr. Aradi Szilárd
 Járműfedélzeti rendszerek II. 6. előadás Dr. Aradi Szilárd LIN (Local Interconnect Network) kommunikációs hálózat 1980-as években jelentek meg az UART alapú soros megoldások a gépjárművekben, Gyors elterjedés
Járműfedélzeti rendszerek II. 6. előadás Dr. Aradi Szilárd LIN (Local Interconnect Network) kommunikációs hálózat 1980-as években jelentek meg az UART alapú soros megoldások a gépjárművekben, Gyors elterjedés
A hagyományos összeköttetést alkalmazó rendszerekben az egyes eszközök közötti adatcsere közvetlen (dedikált) adatvonalakon keresztül történik, de
 adatvonalakon keresztül történik, de") 1 A hagyományos összeköttetést alkalmazó rendszerekben az egyes eszközök közötti adatcsere közvetlen (dedikált) adatvonalakon keresztül történik, de ezt a funkciók összetettsége miatt egyre nehezebb és
1 A hagyományos összeköttetést alkalmazó rendszerekben az egyes eszközök közötti adatcsere közvetlen (dedikált) adatvonalakon keresztül történik, de ezt a funkciók összetettsége miatt egyre nehezebb és
Busz... LAN. Intranet. Internet Hálózati terminológia
 M ODIC ON Busz... LAN. Intranet. Internet Hálózati terminológia HMI Internet Ethernet TCP/IP Vállalati szerver Adat Vállalati Intranet Tűzfal I/O Ethernet TCP/IP Munka állomás Switch / Router Üzemi Intranet
M ODIC ON Busz... LAN. Intranet. Internet Hálózati terminológia HMI Internet Ethernet TCP/IP Vállalati szerver Adat Vállalati Intranet Tűzfal I/O Ethernet TCP/IP Munka állomás Switch / Router Üzemi Intranet
XII. PÁRHUZAMOS ÉS A SOROS ADATÁTVITEL
 XII. PÁRHUZAMOS ÉS A SOROS ADATÁTVITEL Ma, a sok más felhasználás mellett, rendkívül jelentős az adatok (információk) átvitelével foglakozó ágazat. Az átvitel történhet rövid távon, egy berendezésen belül,
XII. PÁRHUZAMOS ÉS A SOROS ADATÁTVITEL Ma, a sok más felhasználás mellett, rendkívül jelentős az adatok (információk) átvitelével foglakozó ágazat. Az átvitel történhet rövid távon, egy berendezésen belül,
4.1.1. I 2 C, SPI, I 2 S, USB, PWM, UART, IrDA
 4.1.1. I 2 C, SPI, I 2 S, USB, PWM, UART, IrDA A címben található jelölések a mikrovezérlők kimentén megjelenő tipikus perifériák, típus jelzései. Mindegyikkel röviden foglalkozni fogunk a folytatásban.
4.1.1. I 2 C, SPI, I 2 S, USB, PWM, UART, IrDA A címben található jelölések a mikrovezérlők kimentén megjelenő tipikus perifériák, típus jelzései. Mindegyikkel röviden foglalkozni fogunk a folytatásban.
1 Járműipari hálózatok
 1 Járműipari hálózatok 1.1 Járműipari kommunikációs technológiák összehasonlítása A járműelektronika viharos fejlődése az utóbbi évtizedekben egyre több új, elektronikusan támogatott funkció megjelenését
1 Járműipari hálózatok 1.1 Járműipari kommunikációs technológiák összehasonlítása A járműelektronika viharos fejlődése az utóbbi évtizedekben egyre több új, elektronikusan támogatott funkció megjelenését
Autóipari beágyazott rendszerek CAN Controller Area Network
 Tóth Csaba, Scherer Balázs: Autóipari beágyazott rendszerek CAN Controller Area Network Előadásvázlat Kézirat Csak belső használatra! 2012.02.05. TCs, SchB BME MIT 2012. Csak belső használatra! Autóipari
Tóth Csaba, Scherer Balázs: Autóipari beágyazott rendszerek CAN Controller Area Network Előadásvázlat Kézirat Csak belső használatra! 2012.02.05. TCs, SchB BME MIT 2012. Csak belső használatra! Autóipari
Megoldás. Feladat 1. Statikus teszt Specifikáció felülvizsgálat
 Megoldás Feladat 1. Statikus teszt Specifikáció felülvizsgálat A feladatban szereplő specifikáció eredeti, angol nyelvű változata egy létező eszköz leírása. Nem állítjuk, hogy az eredeti dokumentum jól
Megoldás Feladat 1. Statikus teszt Specifikáció felülvizsgálat A feladatban szereplő specifikáció eredeti, angol nyelvű változata egy létező eszköz leírása. Nem állítjuk, hogy az eredeti dokumentum jól
Gépjárművek CAN-BUSZ rendszerei
 Gépjárművek CAN-BUSZ rendszerei CAN-BUSZ rendszerek bevezető Bizonyára benned is felmerült a kérdés már, hogy miért bonyolítják meg az autógyárak a autók elektronikáját és berendezéseit, CAN-BUSZ alapú
Gépjárművek CAN-BUSZ rendszerei CAN-BUSZ rendszerek bevezető Bizonyára benned is felmerült a kérdés már, hogy miért bonyolítják meg az autógyárak a autók elektronikáját és berendezéseit, CAN-BUSZ alapú
13. KOMMUNIKÁCIÓS HÁLÓZATOK
 13. KOMMUNIKÁCIÓS HÁLÓZATOK A mai digitális berendezések egy jelentős része más berendezések közötti adatátvitelt végez. Esetenként az átvitel megoldható minimális hardverrel, míg máskor összetett hardver-szoftver
13. KOMMUNIKÁCIÓS HÁLÓZATOK A mai digitális berendezések egy jelentős része más berendezések közötti adatátvitelt végez. Esetenként az átvitel megoldható minimális hardverrel, míg máskor összetett hardver-szoftver
2.5 Soros adatkommunikációs rendszerek CAN (Ötödik rész)
") 2.5 Soros adatkommunikációs rendszerek CAN (Ötödik rész) 3.4. A CAN adatbusz rendszerek üzenetformátuma Az információt a soros adatátviteli rendszereknél szabványosított keretformátumba foglalják. A teljes
2.5 Soros adatkommunikációs rendszerek CAN (Ötödik rész) 3.4. A CAN adatbusz rendszerek üzenetformátuma Az információt a soros adatátviteli rendszereknél szabványosított keretformátumba foglalják. A teljes
loop() Referencia: https://www.arduino.cc/en/reference/homepage
 Referencia: https://www.arduino.cc/en/reference/homepage") Arduino alapok Sketch ~ Solution Forrás:.ino (1.0 előtt.pde).c,.cpp,.h Külső könyvtárak (legacy / 3rd party) Mintakódok (example) setup() Induláskor fut le, kezdeti értékeket állít be, inicializálja a
Arduino alapok Sketch ~ Solution Forrás:.ino (1.0 előtt.pde).c,.cpp,.h Külső könyvtárak (legacy / 3rd party) Mintakódok (example) setup() Induláskor fut le, kezdeti értékeket állít be, inicializálja a
I 2 C, RS-232 és USB. Informatikai eszközök fizikai alapjai. Oláh Tamás István 2015.04.08
 I 2 C, RS-232 és USB Informatikai eszközök fizikai alapjai Oláh Tamás István 2015.04.08 Az I 2 C Busz Phillips által kifejlesztett kétvezetékes szinkron adatátviteli eszköz integrált áramkörök összekapcsolására
I 2 C, RS-232 és USB Informatikai eszközök fizikai alapjai Oláh Tamás István 2015.04.08 Az I 2 C Busz Phillips által kifejlesztett kétvezetékes szinkron adatátviteli eszköz integrált áramkörök összekapcsolására
Autóipari kommunikációs protokollok a CAN
 PANNON EGYETEM Mérnöki Kar JÁRMŰRENDSZERTECHNIKAI LABORATÓRIUM Autóipari kommunikációs protokollok a CAN dr. Fodor Dénes Veszprém, 2012. Köszönetnyilvánítás TÁMOP-4.2.1/B-09/1/KONV-2010-0003 Mobilitás
PANNON EGYETEM Mérnöki Kar JÁRMŰRENDSZERTECHNIKAI LABORATÓRIUM Autóipari kommunikációs protokollok a CAN dr. Fodor Dénes Veszprém, 2012. Köszönetnyilvánítás TÁMOP-4.2.1/B-09/1/KONV-2010-0003 Mobilitás
Járműinformatika Bevezetés
 Járműinformatika Bevezetés 2016/2017. tanév, II. félév Dr. Kovács Szilveszter E-mail: szkovacs@iit.uni-miskolc.hu Informatika Intézet 107/a. Tel: (46) 565-111 / 21-07 Autó elektronika az 1970-es években
Járműinformatika Bevezetés 2016/2017. tanév, II. félév Dr. Kovács Szilveszter E-mail: szkovacs@iit.uni-miskolc.hu Informatika Intézet 107/a. Tel: (46) 565-111 / 21-07 Autó elektronika az 1970-es években
12/2013. (III. 29.) NFM rendelet szakmai és vizsgakövetelménye alapján.
 NFM rendelet szakmai és vizsgakövetelménye alapján.") 12/2013. (III. 29.) NFM rendelet szakmai és vizsgakövetelménye alapján. Szakképesítés, azonosító száma és megnevezése 54 525 01 Autóelektronikai műszerész Tájékoztató A vizsgázó az első lapra írja fel
12/2013. (III. 29.) NFM rendelet szakmai és vizsgakövetelménye alapján. Szakképesítés, azonosító száma és megnevezése 54 525 01 Autóelektronikai műszerész Tájékoztató A vizsgázó az első lapra írja fel
A CAN hálózat alapjai
 A CAN hálózat alapjai 2009.10.24 1 Bevezető A CAN (Controller Area Network) egy nagybiztonságú soros kommunikációs protokoll, adatok valósidejű átvitelének hatékony támogatására. A protokoll kifejlesztésekor
A CAN hálózat alapjai 2009.10.24 1 Bevezető A CAN (Controller Area Network) egy nagybiztonságú soros kommunikációs protokoll, adatok valósidejű átvitelének hatékony támogatására. A protokoll kifejlesztésekor
Modbus kommunikáció légkondícionálókhoz
 Modbus kommunikáció légkondícionálókhoz FJ-RC-MBS-1 Mobus szervezet: -> http://www.modbus.org (néha Modbus-IDA) -> Modbus eszköz kereső motor http://www.modbus.org/devices.php Modbus (RTU) - soros kommunikációs
Modbus kommunikáció légkondícionálókhoz FJ-RC-MBS-1 Mobus szervezet: -> http://www.modbus.org (néha Modbus-IDA) -> Modbus eszköz kereső motor http://www.modbus.org/devices.php Modbus (RTU) - soros kommunikációs
Autóipari vezérlőegységek aktív környezetállósági tesztelésének módszerei
 Autóipari vezérlőegységek aktív környezetállósági tesztelésének módszerei Aradi Szilárd PhD témavezető: Dr. Gyenes Károly Közlekedés és járműirányítás workshop BME 2011 ISBN 978-963-420-975-1 Bevezetés
Autóipari vezérlőegységek aktív környezetállósági tesztelésének módszerei Aradi Szilárd PhD témavezető: Dr. Gyenes Károly Közlekedés és járműirányítás workshop BME 2011 ISBN 978-963-420-975-1 Bevezetés
A számítógép fő részei
 Hardver ismeretek 1 A számítógép fő részei 1. A számítógéppel végzett munka folyamata: bevitel ==> tárolás ==> feldolgozás ==> kivitel 2. A számítógépet 3 fő részre bonthatjuk: központi egységre; perifériákra;
Hardver ismeretek 1 A számítógép fő részei 1. A számítógéppel végzett munka folyamata: bevitel ==> tárolás ==> feldolgozás ==> kivitel 2. A számítógépet 3 fő részre bonthatjuk: központi egységre; perifériákra;
Tájékoztató. Használható segédeszköz: -
 12/2013. (III. 29.) NFM rendelet szakmai és vizsgakövetelménye alapján. Szakképesítés, azonosító száma és megnevezése 54 525 01 Autóelektronikai műszerész Tájékoztató A vizsgázó az első lapra írja fel
12/2013. (III. 29.) NFM rendelet szakmai és vizsgakövetelménye alapján. Szakképesítés, azonosító száma és megnevezése 54 525 01 Autóelektronikai műszerész Tájékoztató A vizsgázó az első lapra írja fel
Hálózati ismeretek. Az együttműködés szükségessége:
 Stand alone Hálózat (csoport) Az együttműködés szükségessége: közös adatok elérése párhuzamosságok elkerülése gyors eredményközlés perifériák kihasználása kommunikáció elősegítése 2010/2011. őszi félév
Stand alone Hálózat (csoport) Az együttműködés szükségessége: közös adatok elérése párhuzamosságok elkerülése gyors eredményközlés perifériák kihasználása kommunikáció elősegítése 2010/2011. őszi félév
Hálózatok I. (MIN3E0IN-L) ELŐADÁS CÍME. Segédlet a gyakorlati órákhoz. 2.Gyakorlat. Göcs László
 ELŐADÁS CÍME. Segédlet a gyakorlati órákhoz. 2.Gyakorlat. Göcs László") (MIN3E0IN-L) ELŐADÁS CÍME Segédlet a gyakorlati órákhoz 2.Gyakorlat Göcs László Manchester kódolás A Manchester kódolást (Phase Encode, PE) nagyon gyakran használják, az Ethernet hálózatok ezt a kódolási
(MIN3E0IN-L) ELŐADÁS CÍME Segédlet a gyakorlati órákhoz 2.Gyakorlat Göcs László Manchester kódolás A Manchester kódolást (Phase Encode, PE) nagyon gyakran használják, az Ethernet hálózatok ezt a kódolási
LIN, BSS, PCM Protokollok (COM Interfész) Szeptember
 Szeptember") LIN, BSS, PCM Protokollok (COM Interfész) 2013. Szeptember Témakörök Háromfázisú generátorok Generátor feszülts ltségszabályzók Digitális vezérl rlésű szabályz lyzók Feszülts ltségszabályzó mérések Digitális
LIN, BSS, PCM Protokollok (COM Interfész) 2013. Szeptember Témakörök Háromfázisú generátorok Generátor feszülts ltségszabályzók Digitális vezérl rlésű szabályz lyzók Feszülts ltségszabályzó mérések Digitális
JÁRMŰIPARBAN GYAKRAN ALKALMAZOTT FEDÉLZETI BUSZOK 1. BEVEZETÉS
 Dr. Schuster György Terpecz Gábor JÁRMŰIPARBAN GYAKRAN ALKALMAZOTT FEDÉLZETI BUSZOK 1. BEVEZETÉS A járműfedélzeti rendszerek bonyolultságának és a megoldandó feladatok komplexitásának növekedésével a huzalozási
Dr. Schuster György Terpecz Gábor JÁRMŰIPARBAN GYAKRAN ALKALMAZOTT FEDÉLZETI BUSZOK 1. BEVEZETÉS A járműfedélzeti rendszerek bonyolultságának és a megoldandó feladatok komplexitásának növekedésével a huzalozási
CAN BUSZ ÁLTALÁNOS ISMERTETŐ
 CAN BUSZ ÁLTALÁNOS ISMERTETŐ 1. KIADÁS 2009 Szerző: Somlyai László Kandó Kálmán Villamosmérnöki Kar, IV. évfolyam oldal 1 Tartalomjegyzék 1. Bevezetés... 3 2. CAN busz... 4 2.1. Kialakulása... 4 2.2. Fizikai
CAN BUSZ ÁLTALÁNOS ISMERTETŐ 1. KIADÁS 2009 Szerző: Somlyai László Kandó Kálmán Villamosmérnöki Kar, IV. évfolyam oldal 1 Tartalomjegyzék 1. Bevezetés... 3 2. CAN busz... 4 2.1. Kialakulása... 4 2.2. Fizikai
Kommunikáció. 3. előadás
 Kommunikáció 3. előadás Kommunikáció A és B folyamatnak meg kell egyeznie a bitek jelentésében Szabályok protokollok ISO OSI Többrétegű protokollok előnyei Kapcsolat-orientált / kapcsolat nélküli Protokollrétegek
Kommunikáció 3. előadás Kommunikáció A és B folyamatnak meg kell egyeznie a bitek jelentésében Szabályok protokollok ISO OSI Többrétegű protokollok előnyei Kapcsolat-orientált / kapcsolat nélküli Protokollrétegek
Roger UT-2. Kommunikációs interfész V3.0
 ROGER UT-2 1 Roger UT-2 Kommunikációs interfész V3.0 TELEPÍTŐI KÉZIKÖNYV ROGER UT-2 2 ÁLTALÁNOS LEÍRÁS Az UT-2 elektromos átalakítóként funkcionál az RS232 és az RS485 kommunikációs interfész-ek között.
ROGER UT-2 1 Roger UT-2 Kommunikációs interfész V3.0 TELEPÍTŐI KÉZIKÖNYV ROGER UT-2 2 ÁLTALÁNOS LEÍRÁS Az UT-2 elektromos átalakítóként funkcionál az RS232 és az RS485 kommunikációs interfész-ek között.
Járműinformatika. 1. Óra. Kőrös Péter
 Járműinformatika 1. Óra Kőrös Péter korosp@sze.hu http://rs1.sze.hu/~korosp/ Ajánlott irodalom Gépjárművek buszhálózatai Dr. Kováts Miklós, Dr. Szalay Zsolt (ISBN 978-963-9945-10-4) Multiplexed Networks
Járműinformatika 1. Óra Kőrös Péter korosp@sze.hu http://rs1.sze.hu/~korosp/ Ajánlott irodalom Gépjárművek buszhálózatai Dr. Kováts Miklós, Dr. Szalay Zsolt (ISBN 978-963-9945-10-4) Multiplexed Networks
Tájékoztató. Használható segédeszköz: számológép, rajzeszközök
 12/2013. (III. 29.) NFM rendelet szakmai és vizsgakövetelménye alapján. Szakképesítés, azonosító száma és megnevezése 55 525 01 Autótechnikus Tájékoztató A vizsgázó az első lapra írja fel a nevét! Ha a
12/2013. (III. 29.) NFM rendelet szakmai és vizsgakövetelménye alapján. Szakképesítés, azonosító száma és megnevezése 55 525 01 Autótechnikus Tájékoztató A vizsgázó az első lapra írja fel a nevét! Ha a
Kiadás. MOVIDRIVE Soros kommunikáció 2001. 11. Kézikönyv 10531769 / HU
 MOVIDRIVE Soros kommunikáció Kiadás 2001. 11. Kézikönyv 10531769 / HU Tartalomjegyzék 1 Fontos tudnivalók...4 2 Bevezetés...5 2.1 A soros interfészek áttekintése... 5 2.2 Műszaki adatok... 8 2.3 MOVILINK
MOVIDRIVE Soros kommunikáció Kiadás 2001. 11. Kézikönyv 10531769 / HU Tartalomjegyzék 1 Fontos tudnivalók...4 2 Bevezetés...5 2.1 A soros interfészek áttekintése... 5 2.2 Műszaki adatok... 8 2.3 MOVILINK
Tartalomjegyzék. Előszó... xi. 1. Bevezetés... 1. 2. Mechanikai, elektromos és logikai jellemzők... 13
 Előszó... xi 1. Bevezetés... 1 1.1. Fogalmak, definíciók... 1 1.1.1. Mintapéldák... 2 1.1.1.1. Mechanikus kapcsoló illesztése... 2 1.1.1.2. Nyomtató illesztése... 3 1.1.1.3. Katódsugárcsöves kijelző (CRT)
Előszó... xi 1. Bevezetés... 1 1.1. Fogalmak, definíciók... 1 1.1.1. Mintapéldák... 2 1.1.1.1. Mechanikus kapcsoló illesztése... 2 1.1.1.2. Nyomtató illesztése... 3 1.1.1.3. Katódsugárcsöves kijelző (CRT)
Billentyűzet. Csatlakozók: A billentyűzetet kétféle csatlakozóval szerelhetik. 5 pólusú DIN (AT vagy XT billentyűzet csatlakozó),
,") Billentyűzet Általános billentyűzet Csatlakozók: A billentyűzetet kétféle csatlakozóval szerelhetik. 5 pólusú DIN (AT vagy XT billentyűzet csatlakozó), 6 pólusú mini-din (PS/2 billentyűzet csatlakozó).
Billentyűzet Általános billentyűzet Csatlakozók: A billentyűzetet kétféle csatlakozóval szerelhetik. 5 pólusú DIN (AT vagy XT billentyűzet csatlakozó), 6 pólusú mini-din (PS/2 billentyűzet csatlakozó).
(1) 10/100/1000Base-T auto-sensing Ethernet port (2) 1000Base-X SFP port (3) Konzol port (4) Port LED-ek (5) Power LED (Power)
 10/100/1000Base-T auto-sensing Ethernet port (2) 1000Base-X SFP port (3) Konzol port (4) Port LED-ek (5) Power LED (Power)") HP 5120-24G 1.ábra Első panel (1) 10/100/1000Base-T auto-sensing Ethernet port (2) 1000Base-X SFP port (3) Konzol port (4) Port LED-ek (5) Power LED (Power) 2.ábra Hátsó panel (1) AC-input csatlakozó (2)
HP 5120-24G 1.ábra Első panel (1) 10/100/1000Base-T auto-sensing Ethernet port (2) 1000Base-X SFP port (3) Konzol port (4) Port LED-ek (5) Power LED (Power) 2.ábra Hátsó panel (1) AC-input csatlakozó (2)
A közúti járművek elektromos rendszerei, kommunikációs hálózatai
 A közúti járművek elektromos rendszerei, kommunikációs hálózatai Dr. Szalay Zsolt Budapesti Műszaki és Gazdaságtudományi Egyetem Gépjárművek és Járműgyártás Tanszék 1 Egy személygépkocsi elektromos rendszere
A közúti járművek elektromos rendszerei, kommunikációs hálózatai Dr. Szalay Zsolt Budapesti Műszaki és Gazdaságtudományi Egyetem Gépjárművek és Járműgyártás Tanszék 1 Egy személygépkocsi elektromos rendszere
Járműinformatika Bevezetés
 Járműinformatika Bevezetés 2018/2019. tanév, II. félév Dr. Kovács Szilveszter E-mail: szkovacs@iit.uni-miskolc.hu Informatika Intézet 107/a. Tel: (46) 565-111 / 21-07 Autó elektronika az 1970-es években
Járműinformatika Bevezetés 2018/2019. tanév, II. félév Dr. Kovács Szilveszter E-mail: szkovacs@iit.uni-miskolc.hu Informatika Intézet 107/a. Tel: (46) 565-111 / 21-07 Autó elektronika az 1970-es években
Frekvencia tartományok. Számítógépes Hálózatok és Internet Eszközök. Frekvencia tartományok rádió kommunikációhoz
 Frekvencia tartományok Számítógépes Hálózatok és Internet Eszközök 2007 5. Fizikai réteg Médium közös használata, példa: ADSL LF (Low Frequency) = LW (Langwelle) = hosszúhullám MF (Medium Frequency) =
Frekvencia tartományok Számítógépes Hálózatok és Internet Eszközök 2007 5. Fizikai réteg Médium közös használata, példa: ADSL LF (Low Frequency) = LW (Langwelle) = hosszúhullám MF (Medium Frequency) =
BEÁGYAZOTT RENDSZEREK TERVEZÉSE UDP csomag küldése és fogadása beágyazott rendszerrel példa
 BEÁGYAZOTT RENDSZEREK TERVEZÉSE 1 feladat: A Netburner MOD5270 fejlesztőlap segítségével megvalósítani csomagok küldését és fogadását a fejlesztőlap és egy PC számítógép között. megoldás: A fejlesztőlapra,
BEÁGYAZOTT RENDSZEREK TERVEZÉSE 1 feladat: A Netburner MOD5270 fejlesztőlap segítségével megvalósítani csomagok küldését és fogadását a fejlesztőlap és egy PC számítógép között. megoldás: A fejlesztőlapra,
Számítógépes hálózatok
 1 Számítógépes hálózatok Hálózat fogalma A hálózat a számítógépek közötti kommunikációs rendszer. Miért érdemes több számítógépet összekapcsolni? Milyen érvek szólnak a hálózat kiépítése mellett? Megoszthatók
1 Számítógépes hálózatok Hálózat fogalma A hálózat a számítógépek közötti kommunikációs rendszer. Miért érdemes több számítógépet összekapcsolni? Milyen érvek szólnak a hálózat kiépítése mellett? Megoszthatók
I+K technológiák. Digitális adatátviteli alapfogalmak Aradi Szilárd
 I+K technológiák Digitális adatátviteli alapfogalmak Aradi Szilárd Hálózati struktúrák A számítógép-hálózat egy olyan speciális rendszer, amely a számítógépek egymás közötti kommunikációját biztosítja.
I+K technológiák Digitális adatátviteli alapfogalmak Aradi Szilárd Hálózati struktúrák A számítógép-hálózat egy olyan speciális rendszer, amely a számítógépek egymás közötti kommunikációját biztosítja.
Hálózati Architektúrák és Protokollok GI BSc. 3. laborgyakorlat
 Hálózati Architektúrák és Protokollok GI BSc. 3. laborgyakorlat Erdős András (demonstrátor) Debreceni Egyetem - Informatikai Kar Informatikai Rendszerek és Hálózatok Tanszék 2016 9/20/2016 9:41 PM 1 Adatkapcsolati
Hálózati Architektúrák és Protokollok GI BSc. 3. laborgyakorlat Erdős András (demonstrátor) Debreceni Egyetem - Informatikai Kar Informatikai Rendszerek és Hálózatok Tanszék 2016 9/20/2016 9:41 PM 1 Adatkapcsolati
IDAXA-PiroSTOP. PIRINT PiroFlex Interfész. Terméklap
 IDAXA-PiroSTOP PIRINT PiroFlex Interfész Terméklap Hexium Kft. PIRINT Terméklap Rev 2 2 Tartalomjegyzék. ISMERTETŐ... 3 2. HARDVER... 4 2. LED... 5 2.2 KAPCSOLAT A VKGY GYŰRŰVEL... 6 2.3 CÍMBEÁLLÍTÁS...
IDAXA-PiroSTOP PIRINT PiroFlex Interfész Terméklap Hexium Kft. PIRINT Terméklap Rev 2 2 Tartalomjegyzék. ISMERTETŐ... 3 2. HARDVER... 4 2. LED... 5 2.2 KAPCSOLAT A VKGY GYŰRŰVEL... 6 2.3 CÍMBEÁLLÍTÁS...
Számítógép Architektúrák
 Perifériakezelés a PCI-ban és a PCI Express-ben Horváth Gábor 2017. február 14. Budapest docens BME Hálózati Rendszerek és Szolgáltatások Tanszék ghorvath@hit.bme.hu A PCI PCI = Peripheral Component Interfész,
Perifériakezelés a PCI-ban és a PCI Express-ben Horváth Gábor 2017. február 14. Budapest docens BME Hálózati Rendszerek és Szolgáltatások Tanszék ghorvath@hit.bme.hu A PCI PCI = Peripheral Component Interfész,
ADATKAPCSOLATI PROTOKOLLOK
 ADATKAPCSOLATI PROTOKOLLOK Hálózati alapismeretek OSI 1 Adatkapcsolati réteg működése Az adatkapcsolati protokollok feladata egy összeállított keret átvitele két csomópont között. Az adatokat a hálózati
ADATKAPCSOLATI PROTOKOLLOK Hálózati alapismeretek OSI 1 Adatkapcsolati réteg működése Az adatkapcsolati protokollok feladata egy összeállított keret átvitele két csomópont között. Az adatokat a hálózati
ARM programozás. Iványi László Szabó Béla
 ARM programozás 4. Óra USART periféria és az RS-485 busz elmélete és használata Iványi László ivanyi.laszlo@stud.uni-obuda.hu Szabó Béla szabo.bela@stud.uni-obuda.hu Mi az USART/UART? USART => Universal
ARM programozás 4. Óra USART periféria és az RS-485 busz elmélete és használata Iványi László ivanyi.laszlo@stud.uni-obuda.hu Szabó Béla szabo.bela@stud.uni-obuda.hu Mi az USART/UART? USART => Universal
SzIP kompatibilis sávszélesség mérések
 SZIPorkázó technológiák SzIP kompatibilis sávszélesség mérések Liszkai János Equicom Kft. SZIP Teljesítőképesség, minőségi paraméterek Feltöltési sebesség [Mbit/s] Letöltési sebesség [Mbit/s] Névleges
SZIPorkázó technológiák SzIP kompatibilis sávszélesség mérések Liszkai János Equicom Kft. SZIP Teljesítőképesség, minőségi paraméterek Feltöltési sebesség [Mbit/s] Letöltési sebesség [Mbit/s] Névleges
TÁVKÖZLÉSI ISMERETEK
 TÁVKÖZLÉSI ISMERETEK Varga József FÉNYVEZETŐS GYAKORLAT Elérhetőség Mail: endrei.varga@t-online.hu Mobil:30/977-4702 1 UTP kábel szerelés UTP (Unshielded Twisted Pair): Árnyékolatlan csavart érpár Külső
TÁVKÖZLÉSI ISMERETEK Varga József FÉNYVEZETŐS GYAKORLAT Elérhetőség Mail: endrei.varga@t-online.hu Mobil:30/977-4702 1 UTP kábel szerelés UTP (Unshielded Twisted Pair): Árnyékolatlan csavart érpár Külső
The Flooding Time Synchronization Protocol
 The Flooding Time Synchronization Protocol Célok: FTSP Alacsony sávszélesség overhead Node és kapcsolati hibák kiküszöbölése Periodikus flooding (sync message) Implicit dinamikus topológia frissítés MAC-layer
The Flooding Time Synchronization Protocol Célok: FTSP Alacsony sávszélesség overhead Node és kapcsolati hibák kiküszöbölése Periodikus flooding (sync message) Implicit dinamikus topológia frissítés MAC-layer
USB adatgyűjtő eszközök és programozásuk Mérő- és adatgyűjtő rendszerek
 USB adatgyűjtő eszközök és programozásuk Mérő- és s adatgyűjt jtő rendszerek Az USB kialakulása Az USB felépítése Az USB tulajdonságai USB eszközök Áttekintés USB eszközök programozása 2 Az USB kialakulása
USB adatgyűjtő eszközök és programozásuk Mérő- és s adatgyűjt jtő rendszerek Az USB kialakulása Az USB felépítése Az USB tulajdonságai USB eszközök Áttekintés USB eszközök programozása 2 Az USB kialakulása
OSI-ISO modell. Az OSI rétegek feladatai: Adatkapcsolati réteg (data link layer) Hálózati réteg (network layer)
 Hálózati réteg (network layer)") OSI-ISO modell Több világcég megalkotta a saját elképzelései alapján a saját hálózati architektúráját, de az eltérések miatt egységesíteni kellett, amit csak nemzetközi szinten lehetett megoldani. Ez a
OSI-ISO modell Több világcég megalkotta a saját elképzelései alapján a saját hálózati architektúráját, de az eltérések miatt egységesíteni kellett, amit csak nemzetközi szinten lehetett megoldani. Ez a
VTOL UAV. Moduláris fedélzeti elektronika fejlesztése pilóta nélküli repülőgépek számára. Árvai László, Doktorandusz, ZMNE ÁRVAI LÁSZLÓ, ZMNE
 Moduláris fedélzeti elektronika fejlesztése pilóta nélküli repülőgépek számára Árvai László, Doktorandusz, ZMNE Tartalom Fejezet Témakör 1. Fedélzeti elektronika tulajdonságai 2. Modularitás 3. Funkcionális
Moduláris fedélzeti elektronika fejlesztése pilóta nélküli repülőgépek számára Árvai László, Doktorandusz, ZMNE Tartalom Fejezet Témakör 1. Fedélzeti elektronika tulajdonságai 2. Modularitás 3. Funkcionális
Két típusú összeköttetés PVC Permanent Virtual Circuits Szolgáltató hozza létre Operátor manuálisan hozza létre a végpontok között (PVI,PCI)
") lab Adathálózatok ATM-en Távközlési és Médiainformatikai Tanszék Budapesti Műszaki és Gazdaságtudományi Egyetem Megvalósítások Multiprotocol encapsulation (RFC1483) - IETF Classical IP over ATM (RFC1577)
lab Adathálózatok ATM-en Távközlési és Médiainformatikai Tanszék Budapesti Műszaki és Gazdaságtudományi Egyetem Megvalósítások Multiprotocol encapsulation (RFC1483) - IETF Classical IP over ATM (RFC1577)
Multiprotocol encapsulation (RFC1483) - IETF Classical IP over ATM (RFC1577) - IETF LAN Emulation (LANE) - ATM Forum Multiprotocol over ATM (MPOA) -
 - IETF Classical IP over ATM (RFC1577) - IETF LAN Emulation (LANE) - ATM Forum Multiprotocol over ATM (MPOA) -") lab Adathálózatok ATM-en Távközlési és Médiainformatikai Tanszék Budapesti Műszaki és Gazdaságtudományi Egyetem Megvalósítások Multiprotocol encapsulation (RFC1483) - IETF Classical IP over ATM (RFC1577)
lab Adathálózatok ATM-en Távközlési és Médiainformatikai Tanszék Budapesti Műszaki és Gazdaságtudományi Egyetem Megvalósítások Multiprotocol encapsulation (RFC1483) - IETF Classical IP over ATM (RFC1577)
Tartalom. Az adatkapcsolati réteg, Ethernet, ARP. Fogalma és feladatai. Adatkapcsolati réteg. A hálókártya képe
 Tartalom Az adatkapcsolati réteg, Ethernet, ARP Adatkapcsolati réteg A hálózati kártya (NIC-card) Ethernet ARP Az ARP protokoll Az ARP protokoll által beírt adatok Az ARP parancs Az ARP folyamat alhálózaton
Tartalom Az adatkapcsolati réteg, Ethernet, ARP Adatkapcsolati réteg A hálózati kártya (NIC-card) Ethernet ARP Az ARP protokoll Az ARP protokoll által beírt adatok Az ARP parancs Az ARP folyamat alhálózaton
Hálózati alapismeretek
 Hálózati alapismeretek Tartalom Hálózat fogalma Előnyei Csoportosítási lehetőségek, topológiák Hálózati eszközök: kártya; switch; router; AP; modem Az Internet története, legfontosabb jellemzői Internet
Hálózati alapismeretek Tartalom Hálózat fogalma Előnyei Csoportosítási lehetőségek, topológiák Hálózati eszközök: kártya; switch; router; AP; modem Az Internet története, legfontosabb jellemzői Internet
Németh Péter Hierarchikus adatgyűjtő-vezérlő BME-VIK R9K7CF hálózati rendszer otthoni alkalmazásokhoz 2012. Tartalomjegyzék. I.
 Tartalomjegyzék Tartalomjegyzék III I. Bevezetés 5 1.1. Előzmények... 6 II. Szenzorhálózatok 9 2.1. Fejlődési tendenciák... 9 2.2. Szenzorhálózatok alapjai... 9 2.3. Alkalmazási területek... 11 III. A
Tartalomjegyzék Tartalomjegyzék III I. Bevezetés 5 1.1. Előzmények... 6 II. Szenzorhálózatok 9 2.1. Fejlődési tendenciák... 9 2.2. Szenzorhálózatok alapjai... 9 2.3. Alkalmazási területek... 11 III. A
Autóipari kommunikációs rendszerek
 Autóipari kommunikációs rendszerek Dr. Fodor, Dénes Dr. Szalay, Zsolt Szerzői jog 2014 Pannon Egyetem A tananyag a TÁMOP-4.1.2.A/1-11/1-2011-0042 azonosító számú Mechatronikai mérnök MSc tananyagfejlesztés
Autóipari kommunikációs rendszerek Dr. Fodor, Dénes Dr. Szalay, Zsolt Szerzői jog 2014 Pannon Egyetem A tananyag a TÁMOP-4.1.2.A/1-11/1-2011-0042 azonosító számú Mechatronikai mérnök MSc tananyagfejlesztés
Digitális rendszerek. Digitális logika szintje
 Digitális rendszerek Digitális logika szintje CPU lapkák Mai modern CPU-k egy lapkán helyezkednek el Kapcsolat a külvilággal: kivezetéseken (lábak) keresztül Cím, adat és vezérlőjelek, ill. sínek (buszok)
Digitális rendszerek Digitális logika szintje CPU lapkák Mai modern CPU-k egy lapkán helyezkednek el Kapcsolat a külvilággal: kivezetéseken (lábak) keresztül Cím, adat és vezérlőjelek, ill. sínek (buszok)
Számítógép-hálózat fogalma (Network)
") Hálózati ismeretek Két vagy több számítógép, melyek összeköttetésben állnak és kommunikálni tudnak egymással. Számítógép-hálózat fogalma (Network) A gyors adatátvitel, illetve összteljesítmény elérése
Hálózati ismeretek Két vagy több számítógép, melyek összeköttetésben állnak és kommunikálni tudnak egymással. Számítógép-hálózat fogalma (Network) A gyors adatátvitel, illetve összteljesítmény elérése
Kezelési utasítás SITRANS F M MAG 8000 & MAG 8000 CT 02/2010. SITRANS F M MAG8000 és MAG8000 CT elektromágneses áramlásmérő típusok
 Kezelési utasítás 02/2010 SITRANS F M MAG 8000 & MAG 8000 CT SITRANS F M MAG8000 és MAG8000 CT elektromágneses áramlásmérő típusok 2 Általános utasítások Az üzembe helyezés során figyelembe kell venni
Kezelési utasítás 02/2010 SITRANS F M MAG 8000 & MAG 8000 CT SITRANS F M MAG8000 és MAG8000 CT elektromágneses áramlásmérő típusok 2 Általános utasítások Az üzembe helyezés során figyelembe kell venni
Számítógépes Hálózatok 2012
 Számítógépes Hálózatok 22 4. Adatkapcsolati réteg CRC, utólagos hibajavítás Hálózatok, 22 Hibafelismerés: CRC Hatékony hibafelismerés: Cyclic Redundancy Check (CRC) A gyakorlatban gyakran használt kód
Számítógépes Hálózatok 22 4. Adatkapcsolati réteg CRC, utólagos hibajavítás Hálózatok, 22 Hibafelismerés: CRC Hatékony hibafelismerés: Cyclic Redundancy Check (CRC) A gyakorlatban gyakran használt kód
Zigbee: vezeték nélküli komplex szenzorhálózatok gyorsan, olcsón, hatékonyan
 Zigbee: vezeték nélküli komplex szenzorhálózatok gyorsan, olcsón, hatékonyan Bevezetés Ballagi Áron Miskolci Egyetem, Automatizálási Tanszék H-3515 Miskolc Egyetemváros E-mail: aron@mazsola.iit.uni-miskolc.hu
Zigbee: vezeték nélküli komplex szenzorhálózatok gyorsan, olcsón, hatékonyan Bevezetés Ballagi Áron Miskolci Egyetem, Automatizálási Tanszék H-3515 Miskolc Egyetemváros E-mail: aron@mazsola.iit.uni-miskolc.hu
Az IEC PRP & HSR protokollok használata IEC61850 kommunikációjú védelmi automatika hálózatokban
 Az IEC 62439 PRP & HSR protokollok használata IEC61850 kommunikációjú védelmi automatika hálózatokban Nagy Róbert Védelmes értekezlet 2014 2014. Június 5. Ethernet az energiaelosztó hálózatokhoz Az Ethernet
Az IEC 62439 PRP & HSR protokollok használata IEC61850 kommunikációjú védelmi automatika hálózatokban Nagy Róbert Védelmes értekezlet 2014 2014. Június 5. Ethernet az energiaelosztó hálózatokhoz Az Ethernet
Procontrol RFP-3. Műszaki adatlap. Rádiótransceiver / kontroller 433 vagy 868 MHz-re, felcsavarható SMA gumiantennával. Verzió: 4.1 2007.12.
 Procontrol RFP-3 Rádiótransceiver / kontroller 433 vagy 868 MHz-re, felcsavarható SMA gumiantennával Műszaki adatlap Verzió: 4.1 2007.12.21 1/6 Tartalomjegyzék RFP-3... 3 Rádiótransceiver / kontroller
Procontrol RFP-3 Rádiótransceiver / kontroller 433 vagy 868 MHz-re, felcsavarható SMA gumiantennával Műszaki adatlap Verzió: 4.1 2007.12.21 1/6 Tartalomjegyzék RFP-3... 3 Rádiótransceiver / kontroller
Intent Autodiga akció
 Intent Autodiga akció A2600 A-2600 Érintőképernyős autódiagnosztikai készülék, nyomtató funkció, MERCEDES, BMW, OPEL, VW / AUDI, MITSUBISHI, VOLVO stb... gépjárművekhez Gyári szintű diagnosztikai eljárásokhoz,
Intent Autodiga akció A2600 A-2600 Érintőképernyős autódiagnosztikai készülék, nyomtató funkció, MERCEDES, BMW, OPEL, VW / AUDI, MITSUBISHI, VOLVO stb... gépjárművekhez Gyári szintű diagnosztikai eljárásokhoz,
Gigabit Ethernet, 10 Gigabit Ethernet. Jákó András goya@eik.bme.hu BME EISzK
 Gigabit Ethernet, 10 Gigabit Ethernet Jákó András goya@eik.bme.hu BME EISzK Agenda Előzmények Gigabit Ethernet 1000Base-X 1000Base-T 10 Gigabit Ethernet Networkshop 2002. Gigabit Ethernet, 10 Gigabit Ethernet
Gigabit Ethernet, 10 Gigabit Ethernet Jákó András goya@eik.bme.hu BME EISzK Agenda Előzmények Gigabit Ethernet 1000Base-X 1000Base-T 10 Gigabit Ethernet Networkshop 2002. Gigabit Ethernet, 10 Gigabit Ethernet
Central monitoring system: rubic mini
 Central monitoring system: rubic mini rubic mini RUBIC MINI CENTRAL UNIT Azokban az épületekben, ahol nagyszámú független biztonsági lámpa beszerelésére van szükség, mindig problémát okoz az ilyen berendezések
Central monitoring system: rubic mini rubic mini RUBIC MINI CENTRAL UNIT Azokban az épületekben, ahol nagyszámú független biztonsági lámpa beszerelésére van szükség, mindig problémát okoz az ilyen berendezések
Programozási segédlet DS89C450 Fejlesztőpanelhez
 Programozási segédlet DS89C450 Fejlesztőpanelhez Készítette: Fekete Dávid Processzor felépítése 2 Perifériák csatlakozása a processzorhoz A perifériák adatlapjai megtalálhatók a programozasi_segedlet.zip-ben.
Programozási segédlet DS89C450 Fejlesztőpanelhez Készítette: Fekete Dávid Processzor felépítése 2 Perifériák csatlakozása a processzorhoz A perifériák adatlapjai megtalálhatók a programozasi_segedlet.zip-ben.
Alacsony fogyasztású IoT rádiós technológiák
 Alacsony fogyasztású IoT rádiós technológiák Fehér Gábor - BME Távközlési és Médiainformatikai Tanszék 4. Magyar Jövő Internet Konferencia és Okos Város Kiállítás 2017. november 8. Miről is lesz szó? Miért
Alacsony fogyasztású IoT rádiós technológiák Fehér Gábor - BME Távközlési és Médiainformatikai Tanszék 4. Magyar Jövő Internet Konferencia és Okos Város Kiállítás 2017. november 8. Miről is lesz szó? Miért
ELŐADÁS 2016-01-05 SZÁMÍTÓGÉP MŰKÖDÉSE FIZIKA ÉS INFORMATIKA
 ELŐADÁS 2016-01-05 SZÁMÍTÓGÉP MŰKÖDÉSE FIZIKA ÉS INFORMATIKA A PC FIZIKAI KIÉPÍTÉSÉNEK ALAPELEMEI Chip (lapka) Mikroprocesszor (CPU) Integrált áramköri lapok: alaplap, bővítőkártyák SZÁMÍTÓGÉP FELÉPÍTÉSE
ELŐADÁS 2016-01-05 SZÁMÍTÓGÉP MŰKÖDÉSE FIZIKA ÉS INFORMATIKA A PC FIZIKAI KIÉPÍTÉSÉNEK ALAPELEMEI Chip (lapka) Mikroprocesszor (CPU) Integrált áramköri lapok: alaplap, bővítőkártyák SZÁMÍTÓGÉP FELÉPÍTÉSE
Hibakódkiolvasó mszer OPEL típusokhoz, MAGYAR nyelven Kizárólagos hivatalos magyarországi forgalmazó:
 Az adatcsere alapjai a CAN-BUSZ rendszerekben. A CAN-BUSZ rendszerekben történ1 adatcserének folyamata olyan mint egy telefonos konferencia beszélgetés. Vagyis az el1fizet1 (autó esetében a vezérl1egység)
Az adatcsere alapjai a CAN-BUSZ rendszerekben. A CAN-BUSZ rendszerekben történ1 adatcserének folyamata olyan mint egy telefonos konferencia beszélgetés. Vagyis az el1fizet1 (autó esetében a vezérl1egység)
Számítógépes hálózatok
 Számítógépes hálózatok 3.gyakorlat Fizikai réteg Kódolások, moduláció, CDMA Laki Sándor lakis@inf.elte.hu http://lakis.web.elte.hu 1 Második házi feladat 2 AM és FM analóg jel modulációja esetén Forrás:
Számítógépes hálózatok 3.gyakorlat Fizikai réteg Kódolások, moduláció, CDMA Laki Sándor lakis@inf.elte.hu http://lakis.web.elte.hu 1 Második házi feladat 2 AM és FM analóg jel modulációja esetén Forrás:
Hálózatok Rétegei. Számítógépes Hálózatok és Internet Eszközök. TCP/IP-Rétegmodell. Az Internet rétegei - TCP/IP-rétegek
 Hálózatok Rétegei Számítógépes Hálózatok és Internet Eszközök WEB FTP Email Telnet Telefon 2008 2. Rétegmodell, Hálózat tipusok Közbenenső réteg(ek) Tw. Pair Koax. Optikai WiFi Satellit 1 2 Az Internet
Hálózatok Rétegei Számítógépes Hálózatok és Internet Eszközök WEB FTP Email Telnet Telefon 2008 2. Rétegmodell, Hálózat tipusok Közbenenső réteg(ek) Tw. Pair Koax. Optikai WiFi Satellit 1 2 Az Internet
Fókuszban a MEGOLDÁSOK KTS 560 / KTS 590. Vezérlőegység diagnosztika az ESI[tronic] használatával
![Fókuszban a MEGOLDÁSOK KTS 560 / KTS 590. Vezérlőegység diagnosztika az ESI[tronic] használatával](/thumbs/91/107540085.jpg "Fókuszban a MEGOLDÁSOK KTS 560 / KTS 590. Vezérlőegység diagnosztika az ESI[tronic] használatával") Fókuszban a MEGOLDÁSOK KTS 560 / KTS 590 Vezérlőegység diagnosztika az ESI[tronic] használatával Élvonalbeli Vezérlőegység diagnosztika az optimális hatékonyságért Az új és erős KTS 560 és KTS 590 modulok
Fókuszban a MEGOLDÁSOK KTS 560 / KTS 590 Vezérlőegység diagnosztika az ESI[tronic] használatával Élvonalbeli Vezérlőegység diagnosztika az optimális hatékonyságért Az új és erős KTS 560 és KTS 590 modulok
Irányítástechnika 1. 8. Elıadás. PLC rendszerek konfigurálása
 Irányítástechnika 1 8. Elıadás PLC rendszerek konfigurálása Irodalom - Helmich József: Irányítástechnika I, 2005 - Zalotay Péter: PLC tanfolyam - Klöckner-Möller Hungária: Hardverleírás és tervezési segédlet,
Irányítástechnika 1 8. Elıadás PLC rendszerek konfigurálása Irodalom - Helmich József: Irányítástechnika I, 2005 - Zalotay Péter: PLC tanfolyam - Klöckner-Möller Hungária: Hardverleírás és tervezési segédlet,
CLEVER LIGHT RENDSZER/ Dinamikus kijáratmutatók
 CLEVER LIGHT RENDSZER/ Dinamikus kijáratmutatók Balatonföldvár, 2018. március 22-23. ASM-Security Kft. Rendszerelemek Hagyományos lámpatestek Címzett lámpatestek Címzett központok Dinamikus kijáratjelzők
CLEVER LIGHT RENDSZER/ Dinamikus kijáratmutatók Balatonföldvár, 2018. március 22-23. ASM-Security Kft. Rendszerelemek Hagyományos lámpatestek Címzett lámpatestek Címzett központok Dinamikus kijáratjelzők
Számítógépes hálózatok
 Számítógépes hálózatok Hajdu György: A vezetékes hálózatok Hajdu Gy. (ELTE) 2005 v.1.0 1 Hálózati alapfogalmak Kettő/több tetszőleges gép kommunikál A hálózat elemeinek bonyolult együttműködése Eltérő
Számítógépes hálózatok Hajdu György: A vezetékes hálózatok Hajdu Gy. (ELTE) 2005 v.1.0 1 Hálózati alapfogalmak Kettő/több tetszőleges gép kommunikál A hálózat elemeinek bonyolult együttműködése Eltérő
SIOUX-RELÉ. Sioux relé modul telepítési leírás Szerkesztés MACIE0191
 SIOUX-RELÉ Sioux relé modul telepítési leírás Szerkesztés 1.2 20MACIE0191 1 Leírás 1.1 Leírás A Sioux-relé egy soros modul, amely tartalmaz egy master kártyát, amely maximum két slave kártyával bővíthető.
SIOUX-RELÉ Sioux relé modul telepítési leírás Szerkesztés 1.2 20MACIE0191 1 Leírás 1.1 Leírás A Sioux-relé egy soros modul, amely tartalmaz egy master kártyát, amely maximum két slave kártyával bővíthető.
Digitális technika VIMIAA01
 BUDAPESTI MŰSZAKI ÉS GAZDASÁGTUDOMÁNYI EGYETEM VILLAMOSMÉRNÖKI ÉS INFORMATIKAI KAR MÉRÉSTECHNIKA ÉS INFORMÁCIÓS RENDSZEREK TANSZÉK Digitális technika VIMIAA01 Fehér Béla BME MIT A kommunikációs technológiák
BUDAPESTI MŰSZAKI ÉS GAZDASÁGTUDOMÁNYI EGYETEM VILLAMOSMÉRNÖKI ÉS INFORMATIKAI KAR MÉRÉSTECHNIKA ÉS INFORMÁCIÓS RENDSZEREK TANSZÉK Digitális technika VIMIAA01 Fehér Béla BME MIT A kommunikációs technológiák
Digitális technika VIMIAA01
 BUDAPESTI MŰSZAKI ÉS GAZDASÁGTUDOMÁNYI EGYETEM VILLAMOSMÉRNÖKI ÉS INFORMATIKAI KAR MÉRÉSTECHNIKA ÉS INFORMÁCIÓS RENDSZEREK TANSZÉK Digitális technika VIMIAA01 Fehér Béla BME MIT A kommunikációs technológiák
BUDAPESTI MŰSZAKI ÉS GAZDASÁGTUDOMÁNYI EGYETEM VILLAMOSMÉRNÖKI ÉS INFORMATIKAI KAR MÉRÉSTECHNIKA ÉS INFORMÁCIÓS RENDSZEREK TANSZÉK Digitális technika VIMIAA01 Fehér Béla BME MIT A kommunikációs technológiák
IoT alapú mezőgazdasági adatgyűjtő prototípus fejlesztési tapasztalatok
 IoT alapú mezőgazdasági adatgyűjtő prototípus fejlesztési tapasztalatok 2016.05.19. Szilágyi Róbert Tóth Mihály Debreceni Egyetem Az IoT Eszközök és más fizikai objektumok elektronikával, vezérléssel,
IoT alapú mezőgazdasági adatgyűjtő prototípus fejlesztési tapasztalatok 2016.05.19. Szilágyi Róbert Tóth Mihály Debreceni Egyetem Az IoT Eszközök és más fizikai objektumok elektronikával, vezérléssel,
WAGO PLC-vel vezérelt hő- és füstelvezetés
 WAGO PLC-vel vezérelt hő- és füstelvezetés Wago Hungária Kft. Cím: 2040. Budaörs, Gyár u. 2. Tel: 23 / 502 170 Fax: 23 / 502 166 E-mail: info.hu@wago.com Web: www.wago.com Készítette: Töreky Gábor Tel:
WAGO PLC-vel vezérelt hő- és füstelvezetés Wago Hungária Kft. Cím: 2040. Budaörs, Gyár u. 2. Tel: 23 / 502 170 Fax: 23 / 502 166 E-mail: info.hu@wago.com Web: www.wago.com Készítette: Töreky Gábor Tel: