Irányítási szoftverek tervezése I. KMAIS11TNK
|
|
|
- Dénes Magyar
- 9 évvel ezelőtt
- Látták:
Átírás
1 Irányítási szoftverek tervezése KMAIS11TNK Tematika Beágyazott rendszerek felépítése Beágyazott rendszerek szoftver vonatkozásai Beágyazott rendszerek hardver vonatkozásai Beágyazott rendszerek tervezése Beágyazott rendszerek Olyan számítógépes eszközök, amelyek alkalmazás orientált célberendezésekkel, ill. komplex alkalmazói rendszerekkel szervesen egybeépülve azok autonóm működését biztosítják, vagy segítik. [IEE Guidelines]. A beágyazott rendszerek szerteágazó monitorozási, vezérlési, ill. szabályozási feladatokat látnak el. Közös jellemzőjük a fizikai környezettel való intenzív információs kapcsolat. A beágyazott rendszer, mint alkalmazás orientált célberendezés egy chip es rendszerek (systems on a chip) újrahasználható részegységek (design re use, IP) integrált érzékelők és beavatkozók mikrovezérlők és programozható logikai eszközök FPGA és DSP processzoros részegységek/kártyák hardver szoftver együttes tervezés a tervezést és a tesztelést segítő technológiák Beágyazott információs rendszerek integrált alkalmazói rendszerek új minőség, újszerű szolgáltatások autonóm viselkedés: flexibilitás és adaptáció mérések beágyazott rendszerekben intelligens működési mechanizmusok új rendszertervezési elvek új rendszerfejlesztési technológiák Új felfogás és interpretáció műszerek, mint beágyazott információs rendszerek CALIN műszerek (kész kalibráló laboratórium) 1 / 32
![komplex alkalmazói rendszerekkel szervesen egybeépülve azok autonóm működését biztosítják, vagy segítik. [IEE Guidelines]. A beágyazott rendszerek szerteágazó monitorozási, vezérlési, ill.](/docs-images/47/6873665/images/page_1.jpg "szabályozási feladatokat látnak el. Közös jellemzőjük a fizikai környezettel való intenzív információs kapcsolat.")
2 az oszcilloszkóp ma (univerzális jelanalizátor) beágyazott információs rendszerek, mint műszerek monitorozási funkciók: működési jellemzők,... diagnosztika: állapotfelmérés, hibadetektálás,.. Tervezés, gyártás és üzemeltetés a szolgáltatások komplexitásának kezelése a szolgáltatások minőségi kérdései hardver szoftver együttes tervezés építkezés komponensekből konfigurálhatóság (tervezéskor: at design time) tesztelhetőség szolgáltatásbiztonság újrakonfigurálhatóság (üzem közben: at runtime) A hierarchikus és több aspektusú modellezések szerepe komplexitás kezelés a specifikáció teljesítése, mint kényszer kielégítés kvantitatív és kvalitatív jellemzések válaszidő követelmények teljesítése hibadetektálás és lokalizálás támogatása aktív modellek létrehozása Minőségbiztosítás a tervezés fázisában hardver és szoftver együttes tervezés a szolgáltatásbiztonság, mint tervezési szempont biztonsági és hibatűrési képességek kialakítása szoftver biztonság és hibatűrés elosztott rendszerek biztonsága és hibatűrése adatbázisok biztonsága és hibatűrése időkezelés biztonsága és hibatűrése Termékminősítés Általában ún. teljesítmény (performance) jellemzők alapján Országh szerint: Performance: megtétel, végrehajtás, véghezvitel, teljesítés, elvégzés; előadás, eljátszás; 2 / 32

3 teljesítmény; teljesítőképesség; beágyazott rendszerek méréstechnikája 3 / 32

4 Valós idejű rendszerek Az operációs rendszerek egy speciális fajtája, amelyben minden egyes rendszerhívás egy előre meghatározott időn belül garantáltan végrehajtásra kerül, a konkrét körülményektől függetlenül. A nem valós idejű operációs rendszerek esetében ilyen korlát nem létezik, és a rendszerhívások a körülményektől függően elméletileg rendkívül sok ideig is eltarthatnak, ami azonban problémát jelenthet bizonyos szigorú időzítést és azonnali rendelkezésre állást igénylő feladatok esetében. A valós idejű operációs rendszereket általában beágyazott eszközökben alkalmazzák, amelyek a helyes és megbízható működéséhez elengedhetetlenül szükségesek speciális jellemzői. Beágyazott rendszerek felépítése A beágyazott rendszerekkel szemben támasztott főbb követelmények: funkcionális, időzítési, megbízhatósági. Ezen követelmények hatása a tervezésre. Funkcionális követelmények Berendezéssel szembeni követelmények Környezeti feltételek Statikus követelmények Villamos követelmények Mechanikai követelmények Időzítési követelmények Real time rendszerek követelményei Eseménykezelés Szinkron események Aszinkron események Belső időzítők Külső időzítőkhöz történő szinkronozálás Megbízhatósági követelménynek Forrasztások száma Elemek száma Csatlakozása száma Pergésmentesítése 4 / 32

5 Áramkör típus TTL, CMOS Beágyazott rendszerek szoftver vonatkozásai I. Időkezelés. Időkezelés főbb feladatai. Idő és sorrend. Kemény és puha valós idejű rendszerek. Hibás állapot kezelés. Vezérlési módok. Időmérés eszközei és módszerei, időnormáliák. Idő reprezentálása. Időkényszerek. Szinkronizálás, órarendszerek. Master slave algoritmusok. Elosztott szinkronizációs algoritmusok. Valós idejű rendszerek modellezése. Időkezelés Időkezelés főbb feladatai. Idő és sorrend. Kemény és puha valós idejű rendszerek. Hibás állapot kezelés. Időkezelés Példa: a relativisztikus hatás bemutatására: elosztott rendszerekben az időben egymást követő eseményekről érkező híradások érkezési sorrendje megváltozhat. Megjegyzés: Egy esemény a rendszer állapot detektálható, pillanatszerű változása. Az időkezelés főbb feladatai: az idő reprezentációja (time representation) következtetés idővel (temporal reasoning) az idő információ kinyerése (how to gain knowledge of time) az időbeni tulajdonságok menedzselése (management of temporal properties) Az idő és sorrend/rendezés kérdése: Az időbeni sorrend (temporal order): a folytonos, valós idő modellezhető időpillanatok végtelen [T] halmazaként, amely a következő tulajdonságokkal jellemezhető: (1) [T] rendezett halmaz, azaz ha p és q két időpillanat, akkor vagy egybeesnek, vagy p megelőzi q t, vagy q megelőzi p t, és ezek a lehetőségek egymást kizárják. (2) [T] sűrű halmaz, azaz van legalább egy q időpillanat p és r között, ha p és r nem esik egybe. A kauzális (oksági) sorrend (causal order): többet fejez ki, mint az időbeni sorrend. Egy lehetséges definíció: Ha egy e1 esemény egy e2 esemény oka, akkor e1 kis megváltozása együtt jár e2 kis megváltozásával, de e2 kis megváltozása nem szükségképpen jár e1 kis 5 / 32

6 megváltozásával. továbbítási sorrend (delivery order): gyengébb az előzőekhez képest; azt garantálja, hogy az egyes csomópontok számítógépei az események sorozatát ugyanabban a továbbítási sorrendben látják. Kemény és puha valós idejű rendszerek: kemény valós idejű rendszer (hard real time system (HRT)): katasztrofális következményekkel jár, ha nem tartjuk az időkorlátot (pl. járművek vezérlése). puha valós idejű rendszer (soft real time system (SRT), on line system): az eredmény értékes az időkorláton túl is, de az idővel degradálódik (pl. tranzakciós rendszerek). HRT és SRT jellemzése különböző szempontok szerint: válaszidő (response time): HRT esetében ms, vagy annál kevesebb (pl. légzsák), az emberi beavatkozás lehetősége kizárt, a rendszer autonóm működésű és biztonságos kell, hogy legyen. SRT esetén a válaszidő másodperc nagyságrendű, az időkorlát túllépése nem okoz katasztrófát. viselkedés csúcsterhelés esetén (peak load performance): HRT esetén jól definiált kell, hogy legyen. Tervezéskor biztosítani kell, hogy a számítógépes rendszer minden szituációban az időkorláton belül teljesítse feladatát, hiszen a HRT rendszerek éppen azáltal valósítják meg a velük szemben megfogalmazott elvárásokat, hogy még a ritkán előforduló csúcsterhelések idején is jósolható módon viselkednek. Az SRT rendszereket átlagos teljesítmény jellemzőkre tervezzük, a ritkán előforduló csúcsterhelések következményeit gazdaságossági megfontolásból elviseljük. az ütem vezérlése (control of pace): A HRT rendszernek minden körülmények között szinkronban kell lennie környezetének (irányított objektum, ill. az emberi operátor) állapotával. Az SRT rendszerek befolyásolják környezetüket, ha nem képesek eleget tenni feladatuknak (egy tranzakciós rendszer például megnöveli a válaszidejét). biztonság (safety): A biztonság kritikusságának mértékétől függően sokféle feladat merülhet fel tervezési időben. Autonóm hibadetektálási mechanizmusokat kell kidolgozni, amelyek valamilyen talpra állítási (recovery) akciót indítanak az adott alkalmazás által diktált időviszonyok mellett. az adatfájlok mérete (size of data files): HRT rendszerek kisméretű adatfájlokon dolgoznak, amelyek valós idejű adatbázist alkotnak. Ezek jellemzője az adatintegritás rövid idejűsége, mert az idő múlásával az adatok jelentős része aktualitását veszíti. Az SRT rendszerekben éppen ellenkezőleg a hosszú idejű adatintegritás fontos. 6 / 32
, on line system): az eredmény értékes az időkorláton túl is, de az idővel degradálódik (pl. tranzakciós rendszerek).")
7 a redundancia típusa (redundancy type): SRT rendszerekben (pl. tranzakciós rendszerek) hiba esetén a számításokat visszagörgetik a legutolsó ellenőrzési ponthoz, amikor még biztosan helyes volt a működés és onnan kezdik a talpra állítást. HRT rendszerek esetén ez a stratégia csak korlátozottan használható mert: (1) az időkorlát tartása nehéz, mert a visszagörgetéshez szükséges idő nem, vagy nehezen jósolható, (2) a környezetet befolyásoló utasítás nem tehető meg nem történtté, (3) az ellenőrzési pontnál érvényes adatok az idő múlásával érvényüket veszítik. adat integritás (data integrity): HRT: rövid idejű, SRT: hosszú idejű. hibadetektálás (error detection): HRT: autonóm, SRT: felhasználó által segített. Hibás állapot kezelése: (1) katasztrófa megakadályozás bénítással (fail safe). Pl. vonatok jelzőlámpa rendszere: minden lámpa piros. (2) katasztrófa elhárítás extra eszközökkel (fail operational). Pl. repülőgép: muszáj valahogy leszállni. 7 / 32
 az ellenőrzési pontnál érvényes adatok az idő múlásával érvényüket veszítik.")
8 Időkezelés II. Vezérlési módok. Időmérés eszközei és módszerei, időnormáliák. Idő reprezentálása. Időkényszerek. Szinkronizálás, órarendszerek. Master slave algoritmusok. Elosztott szinkronizációs algoritmusok. Vezérlési mód: (1) esemény vezérelt (event triggered): aszinkron módon érkező megszakítások kiszolgálása, ill. ebből adódóan dinamikus ütemezés szükséges. (2) idő vezérelt (time triggered): minden kommunikáció, ill. feldolgozás központi időzítéshez (órához) szinkronizált módon történik. Időmérés eszközei és módszerei: (1) Időmérés elektronikus számlálóval: Precíz óragenerátor jelének számlálása a megmérendő ideig: Tx = N/fo, ahol N a számláló tartalma, fo pedig az órajel frekvencia. Az időmérés relatív hibája : Tx / Tx = 1/N + fo / fo, azaz a kis mérési bizonytalanságú méréshez pontos és a mérendő időhöz képest nagy frekvenciájú óra szükséges, hogy N értéke kellően nagy legyen. (2) Kettős nóniuszos időmérés: A mérendő időtartam kezdete és vége egy egy T0(1+δ) periódusidejű, kvarcpontosságú órát indít. Ezek jelét egy szabadon futó T0 periódusidejű, kvarcpontosságú óra jelével hasonlítjuk össze, figyelve a felfutó élek egybeesését. A mérendő időtartam kezdetétől az első koincidenciáig eltelt idő N1T0(1+δ), a mérendő időtartam végétől az első koincidenciáig eltelt idő N2T0(1+δ), a két koincidencia között eltelt idő, pedig N0T0. Mindezek alapján Tx = T0[± N0 + (N1 N2) (1+δ)], ahol az N0 előtti előjelet a két koincidencia időbeni sorrendje határozza meg. Az idő reprezentálása Két elmélet : (1) időpont alapú (time point based), (2) idő intervallum alapú (time interval based). Valós idejű rendszerekben mindkét megközelítés kell, mert egyrészt az egyes események által kiváltott aktivitások végrehajtási idejével kalkulálni kell, másrészt ha csak (minden szituációban elegendően hosszú) intervallumokkal operálunk, akkor a végrehajtás indokolatlanul hosszú lesz. 8 / 32
 Időmérés elektronikus számlálóval: Precíz óragenerátor jelének számlálása a megmérendő ideig: Tx = N/fo, ahol N a számláló tartalma, fo pedig az órajel frekvencia.")
9 Időkényszerek Lehetséges megadásuk: (Id, Taft(cond1), cid, fid, Tbef(cond2)) ahol: Id a folyamat (végrehajtható objektum) azonosítója, Taft(cond1) annak az eseménynek a megadása, amely után az Id folyamatnak a végrehajtását meg kell kezdeni, cid a számítási idő korlát az Id folyamat minden egyes végrehajtására, fid a számítás végrehajtásának gyakorisága/frekvenciája, Tbef(cond2) annak az eseménynek a megadása, amely előtt be kell fejezni az Id folyamat futtatását. Előfordulási intervallum: Off line számítás: On line számítás: [Taft(cond1), Tbef(cond2)] cond2 = CId = cond2 = CId < Időszolgáltatás és óraszinkronizáció: Az idő forrását órának nevezzük. Az i edik óra a valós idő egy Ci (t) függvénye. Referencia óra: Ci (t) = t; t Helyes óra: az i edik óra helyes (correct) t0 ban, ha Ci (t0) = t0 Pontos óra: az i edik óra pontos (accurate) t0 ban, ha δci (t)/δt = 1; t= t0 Ha egy óra pontatlan egy adott időpillanatban, akkor azt mondjuk, hogy csúszik abban az időpontban. Óra szinkronizálás: Miért van rá szükség? (1) a rendezés támogatására, (2) az idő pontosabb ismerete érdekében A szinkronizálás egy óra frissítés (update): Ci (ti) F(Ci1 (ti1), Ci2 (ti2),..., Cik (tik)) ahol F jelképezi a frissítési mechanizmust k órára alapozva. A frissítési függvénynek monotonnak kell lenni, hogy a lokális rendezések egyértelműek maradjanak. 9 / 32
, Tbef(cond2)] cond2 = CId = cond2 = CId < Időszolgáltatás és óraszinkronizáció: Az idő forrását órának nevezzük.")
10 Óra rendszerek típusai: Központi óra rendszerek (central clock systems): egy pontos óra szolgáltatja az időt a teljes rendszer számára, a többi órát a rendszer a normális működés alatt figyelmen kívül hagyja, hibatűréshez készenléti (standby) redundanciát alkalmaznak, pontos módszer (ns en, ms en belül), költséges speciális, a processzorba integrált hardvert igényel; a központi óra állítja ezt a hardvert a megfelelő értékre; ezt minden végrehajtó folyamat olvasni tudja, a kommunikációs igény alacsony (egy üzenet frissítésenként), a GPS (global Positioning System) jó példa erre (4 órajelet sugárzó műhold, amellyel néhány ns pontossággal lehet szinkronizálni). Központilag felügyelt óra rendszerek (centrally controlled clock systems) egy (pontosnak elfogadott) master óra lekérdezi a slave órákat, megmérik az óra eltéréseket és a master korrekciót ír elő a slave számára, ha a master óra meghibásodik, akkor valamilyen választási algoritmussal új master t választanak, az átviteli időket és a késleltetéseket becsülni kell, mert lényegesen befolyásolják a mért óra eltéréseket, a kommunikációs terhelés erősebb, mint előbb. Elosztott óra rendszerek (distributed clock systems) az óra szempontjából az összes csomópont homogén, ugyanazt az algoritmust futtatja, minden csomópont frissíti az óráját, miután megkapta, és helyesség szempontjából ellenőrizte/becsülte a más órák által kapott időt, a hibatűrés protokoll alapú. Ha egy csomópont kiesik, az nem befolyásolja a többi csomópont működését; észlelik a hibát, és figyelmen kívül hagyják a meghibásodott csomópontot, A kommunikációs igény viszonylag nagy, különösen akkor, ha alattomos hibák esetén is a robusztusság követelmény. 10 / 32
.")
11 Idő normáliák (standardok) Elosztott, valós idejű rendszerekben kettőt használnak elterjedten: Nemzetközi Atomi Idő (Temps Atomique Internationale, TAI) Alapja egy ún. atomóra: Cesium 133 atom által (specifikált módon) kisugárzott frekvencia ed része 1 sec. A TAI által biztosított időskála kronoszkópikus, azaz folytonos. Univerzális idő (Universal Time Coordinated, UTC) A Föld és a Nap mozgásából, azaz asztronómiai megfigyelésekből vezették le be lépett a GMT (Greenwich Mean Time) helyébe azzal, hogy a másodperc a TAI szerint értendő. A Föld mozgása enyhén szabálytalan, ezért alkalmanként beszúrnak egy szökő másodpercet január elsején a TAI és az UTC (egy megegyezés alapján) ugyanazt mutatta. Azóta az UTC mintegy 30 másodperccel eltérést szedett fel. Mivel ezeket a Bureau Internationale de l Heure szükség szerint szökő másodpercekkel korrigálja, a tényleges eltérés mindig ismert és kis mértékű. Megjegyzés: a szökő másodperc beillesztése a naptári év váltás pillanatában veszélyes: az január 1 én 00:00:00 kor egy másodperccel visszaállított óra még egyszer léptette a napot megadó számlálót és ezért a következő másodpercben az óra január 2 át mutatott. Idő formátum legelterjedtebb: Network Time Protocol (NTP). Ez a formátum 8 bájtot használ, amelyből 4 az UTC másodperceket, 4 pedig a másodperc törtrészét tárolja, az utóbbit 232 psec felbontásban január elsején 00:00:00 kor került a 8 bájtos számlálóba, ami az január elseje 00:00:00 tól eltelt másodpercek száma volt. Ez az ábrázolási mód 2036 ig jó (136 év a körülfordulási ciklusa). 11 / 32
 helyébe azzal, hogy a másodperc a TAI szerint értendő. A Föld mozgása enyhén szabálytalan, ezért alkalmanként beszúrnak egy szökő másodpercet.")
12 Beágyazott rendszerek szoftver vonatkozásai II. Ütemezés. Periodikus, statikus, ciklikus ütemezés. Prioritás alapú ütemezés. Operációs rendszer overhead je. Memória management. Valós idejű kommunikáció. Követelmények, flow control. Kommunikációs közeg elérési protokollok. Beágyazott rendszerek szoftver vonatkozásai III. Valós idejű operációs rendszerek. Task management. Processzek közötti kommunikáció. Idő management. Hiba detektálás. Esettanulmány. Nyelvi támogatás és korlátozások. Real time programozási nyelvek. A programozási nyelvek beágyazott rendszerekben. Beágyazott rendszerek tipikus szoftver architektúrái. Beágyazott rendszerek szoftver vonatkozásai IV. A programozási nyelvek beágyazott rendszerekben. Beágyazott rendszerek tipikus szoftver architektúrái. 12 / 32

13 Beágyazott rendszerek hardver vonatkozásai I. Beágyazott rendszerek tipikus hardver struktúrája. Perifériák (AD/DA, kijelzők, billentyűzet, kommunikációs csatornák). Beágyazott rendszerek hardver vonatkozásai II. Periféria illesztés HW szempontjai. Regiszter, memóriába ágyazott, IO. Periféria szinkronizálása. Beágyazott rendszerek feldolgozó egységei (controller, DSP, FPGA). Integrált perifériák. PERIFÉRIAKEZELÉSI MÓDSZEREK ESZKÖZSZINTŰ KEZELÉS: a perifériális eszköz fizikai sajátosságainak megfelelő illesztési felületet és utasításkészletet biztosítunk. Kis rendszerek, beépített rendszerek esetén előnyös. Jól kihasználhatók a processzor és a periféria sajátosságai. LOGIKAI KEZELÉS: általánosított illesztési felületeket és beviteli/kiviteli eljárásokat alkalmazunk. ESZKÖZSZINTŰ PERIFÉRIAKEZELÉS FELTÉTEL NÉLKÜLI BEVITEL/KIVITEL A processzor és a periféria nincs szinkronizálva. (A processzornak és a perifériának mindig rendelkezésre kell állnia.) Egyszerű IN és OUT utasítások. JELZŐBITES (FELTÉTELES) BEVITEL/KIVITEL Az együttműködésért kizárólag a processzor felelős. (A processzornak mindig rendelkezésre kell állnia.) ESZKÖZSZINTŰ PERIFÉRIAKEZELÉS 2 SZEMAFOROS (FELTÉTELES) BEVITEL/KIVITEL Kölcsönös szinkronizálás (kézfogásos üzemmód). (Mindkét fél képes a másikat bevárni, illetve a másikat várakozásra kényszeríteni.) Nem minden periféria sebessége befolyásolható. 13 / 32

14 ESZKÖZSZINTŰ PERIFÉRIAKEZELÉS 3 JELZŐBITES BEVITEL/KIVITEL ESZKÖZSZINTŰ PERIFÉRIAKEZELÉS 4 SZEMAFOROS BEVITEL/KIVITEL ESZKÖZSZINTŰ PERIFÉRIAKEZELÉS 5 SZEMAFOROS BEVITEL/KIVITEL 2 14 / 32

15 15 / 32

16 LOGIKAI PERIFÉRIAKEZELÉS Sokféle perifériális eszköz: általánosított beviteli/kiviteli eljárások és illesztési felület. I/O PROCESSZORra, ill. CSATORNÁra alapozott kezelés: rögzített feladatú autonóm modulok, felszabadítják a processzort a periféria részletes kezelése alól; I/O processzor: átviteli műveletekre optimalizált + általános adatfeldolgozási képesség. LOGIKAI PERIFÉRIAKEZELÉS 2 16 / 32

17 LOGIKAI PERIFÉRIAKEZELÉS 3 KÖZVETLEN TÁROLÓ HOZZÁFÉRÉS (Direct Memory Access, DMA) TÁRSPROCESSZOROS RENDSZEREK 17 / 32

18 MULTIPROCESSZOROS RENDSZEREK 1 A mikroprocesszorok árának jelentős csökkenése lehetővé teszi, hogy azokat egy bonyolult rendszerben univerzális építőelemekként használjuk. MULTIPROCESSZOROS RENDSZER: RENDSZER egymástól független (rész)feladatok konkurens feldolgozását végző többprocesszoros rendszer. Két esemény konkurens, ha egyik sem tudja kauzálisan befolyásolni a másikat. MULTIPROCESSZOROS RENDSZEREK 2 MULTIPROCESSZOROS RENDSZEREK 3 18 / 32

19 19 / 32
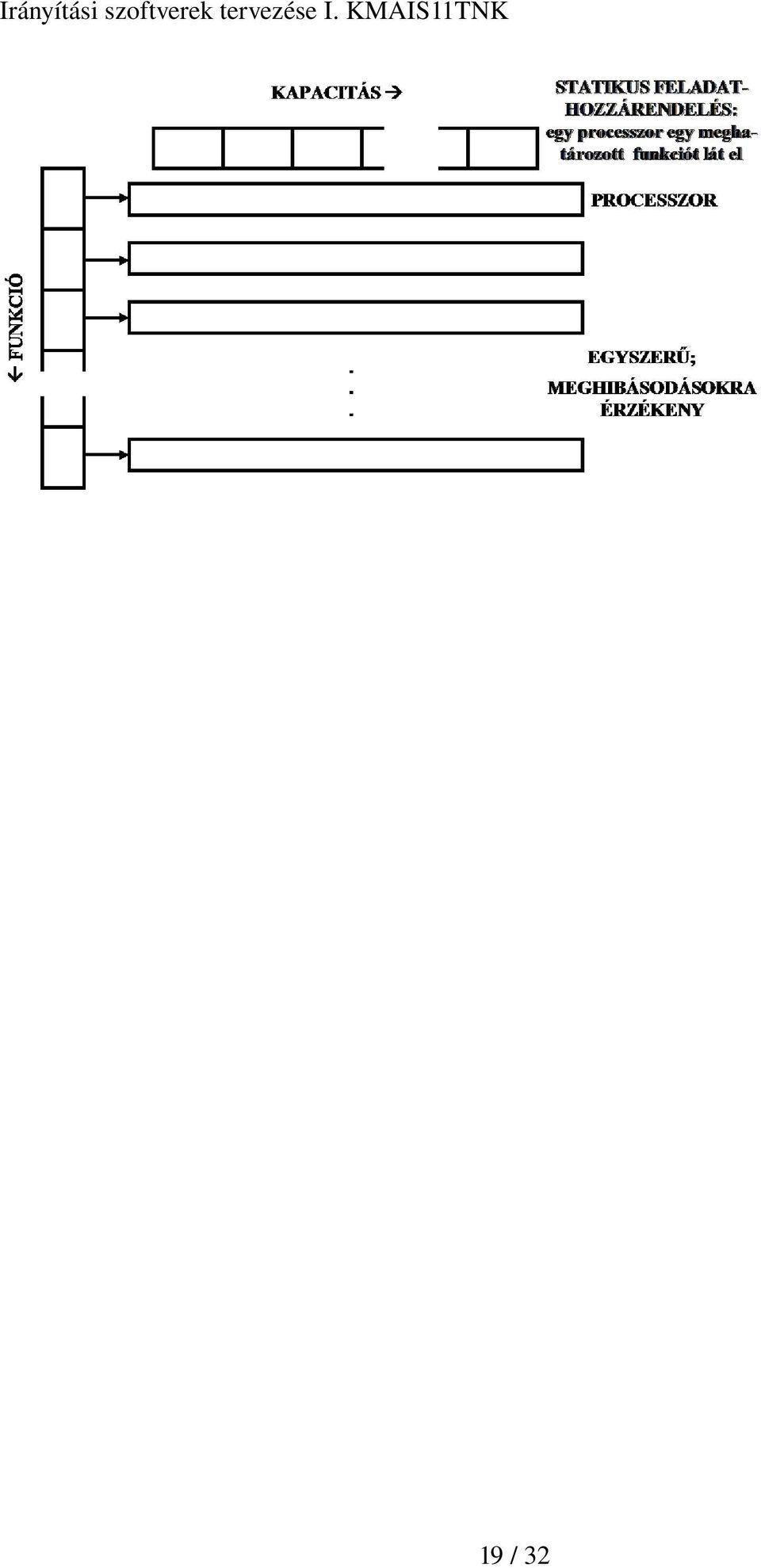
20 MULTIPROCESSZOROS RENDSZEREK 4 MULTIPROCESSZOROS RENDSZEREK 5 LAZÁN CSATOLT RENDSZER: üzenet kommunikáció, minden processzornak saját operációs rendszere van. Egyszerű, lassú. SZOROSAN CSATOLT RENDSZER: kommunikáció közös erőforráson keresztül, egyetlen operációs rendszer van. Bonyolult, gyors. LAZÁN CSATOLT RENDSZEREK KOMMUNIKÁCIÓS ALRENDSZEReken keresztül megvalósított, logikailag pont pont összeköttetés 20 / 32

21 LAZÁN CSATOLT RENDSZEREK 2 LAZÁN CSATOLT RENDSZEREK 3 LAZÁN CSATOLT RENDSZEREK 4 A kommunikációs alrendszer a logikai pont pont összeköttetést leképzi a fizikai átviteli közegre. A fizikai átviteli közeg korlátozott átviteli kapacitást biztosít, így TORLÓDÁSVEZÉRLÉS TORLÓDÁSVEZÉRLÉS kell. Minden processzor kap egy hitelértéket és akkor küldhet ki üzenetet, ha hitelértéke > 0. Probléma: hitel elveszésének kezelése elvileg megoldhatatlan nagy rendszerekben. 21 / 32
22 MULTIPROCESSZOROS RENDSZEREK SZOROSAN CSATOLT RENDSZER: kommunikáció közös erőforráson keresztül, egyetlen operációs rendszer van. Bonyolult, gyors. Alapvető változatai: crossbar szervezés, multiport memóriára alapozott szervezés, rendszersínre alapozott szervezés. SZOROSAN CSATOLT RENDSZEREK 1 Előnyök: egyszerű felépítés, könnyen átkonfigurálható. Hátrányok: csak kis rendszerek esetén használható (problémát jelent a szabadút keresés), bonyolult kapcsolókat igényel. 22 / 32
23 SZOROSAN CSATOLT RENDSZEREK 2 Ha a két oldalról azonos címhez kívánunk fordulni, akkor a beépített vezérlőáramkör a később jövő felé foglalt jelet ad ki. Ezt csak íráskor kell figyelembe venni, várakozásra késztetve a megfelelő oldali processzort. Az utolsó regiszterbe a jobboldali processzor valamit beír. Ezt a baloldali felé egy INT B jelzi. A baloldali processzor kiolvasva a regisztert törli a jelzést (hardver SZEMAFOR). ELŐNY: egyszerű. HÁTRÁNYOK: csak kevés (2 4) port valósítható meg a bonyolult kapurendszer miatt; csak kis rendszer építhető ki; kis memóriakapacitás valósítható meg a bonyolult kapurendszer miatt; nehéz átkonfigurálni. 23 / 32
24 SZOROSAN CSATOLT RENDSZEREK 3 RENDSZERSÍNRE ALAPOZOTT SZERVEZÉS Master modul: magához ragadhatja a rendszersín vezérlését. Slave modul: nem ragadhatja magához a rendszersín vezérlését; közös erőforrás(oka)t tartalmaz. A rendszer (elvben) tetszőlegesen bővíthető és átkonfigurálható. Az egyes processzorokon futó folyamatok (a slave modulban lévő) közös erőforráson keresztül kívánnak kommunikálni egymással. Fel kell oldani a közös erőforrás használatáért folyó versengést. DE: a folyamatokat futtató master moduloknak előbb hozzá kell férniük a rendszersínhez. A master modulok versenyeznek a rendszersínhez való hozzáférés jogáért: SOROS (daisy chain), vagy PÁRHUZAMOS hozzáférés vezérlés. 24 / 32
25 SZOROSAN CSATOLT RENDSZEREK 4 SOROS HOZZÁFÉRÉS VEZÉRLÉS Aki hozzá akar férni a rendszersínhez, az PKI := 1 et állít be (az ÓRA felfutó élekor), egyébként megismétli a PBE bemenetén vett értéket. ELŐNYE: nagyon egyszerű. HÁTRÁNYAI: A terjedési késleltetés miatt csak nagyon kis rendszerekben alkalmazható (meg kell várni, hogy baloldalról indulva az igény végigfusson a láncon). Nehéz átkonfigurálni (vezetéket kell elvágni és összekötni), de a kis rendszerek (nagy megbízhatóság) miatt erre menetközben nincs szükség. A rögzített prioritás miatt éhezés léphet fel. SZOROSAN CSATOLT RENDSZEREK 5 PÁRHUZAMOS HOZZÁFÉRÉS VEZÉRLÉS A prioritás lehet rögzített (a prioritás eldöntő egyszerű kombinációs áramkör), vagy változó (pl. körbenforgó round robin ekkor hosszabb idő alatt egyenlő esélyt kap minden modul). 25 / 32
26 A prioritás eldöntőt nagyobb rendszereknél elosztott módon valósítjuk meg (ellenkező esetben a rendszer kritikus része lenne). SZOROSAN CSATOLT RENDSZEREK 6 POSTAFIÓK ELV A termelőfolyamat (pl. az MM1 master modulon) adatokat ír be a feladathoz rendelt területre (postafiókba). Az adatot termelő folyamat számára közömbös, hogy ki veszi ki az adatot a postafiókból (átkonfigurálhatóság). Az adatot fogyasztó folyamat kiolvassa a postafiókot. A fogyasztó számára közömbös, hogy ki tette be az adatot a postafiókba (átkonfigurálhatóság). Egyszerre csak egyetlen folyamat férhet hozzá a postafiókhoz (kölcsönös kizárás). A postafiók használatát (KRITIKUS SZEKCIÓ) megfelelő szemafor(ok) kezelésével biztosítjuk. A szemafor vizsgálatának és átállításának oszthatatlan műveletnek kell lennie (egyébként egy másik folyamat is úgy érezhetné, hogy hozzáférhet a postafiókhoz). Ezt a P és V primitívekkel oldjuk meg (sok processzor rendelkezik ilyen hardver utasításokkal). Foglalt postafiók esetén egy ahhoz hozzáférni kívánó folyamat állandóan vizsgálja a szemafort (és használja a rendszersínt). Célszerű lehet elaltatni a várakozó folyamatot és felébreszteni, ha felszabadul a postafiók. Általános esetben egy postafiókba több folyamat tehet be adatokat, és több folyamat vehet ki adatokat. A termelési és a fogyasztási sebesség eltérése miatt torlódás léphet fel. Újabb (nem bináris) szemaforokat vezetünk be. A postafiókban leveleket helyezünk el borítékokban. A levelet tartalmazó borítékok száma TELE, az üreseké ÜRES. 26 / 32
27 Perifériakezelés RS 232 RS 485 CAN ISO (HIGH SPEED), ISO (LOW SPEED), CAN busz általánosan A CAN (Controller Area Network, hálózat vezérlők számára) busz egy soros adatátviteli lehetőség valós idejű alkalmazások számára. Egészen 1 Mbps (Mega Bit Per Secundum, millió jelzés másodpercenként) sebességig alkalmazható, kifinomult hibaészlelési módszereket használ, és kiemelkedő a hibatűrése. Tehát alkalmas a B és C osztályú kommunikáció bonyolítására is. Eredetileg a Bosch GmBH fejlesztette ki az 1980 as évek közepén az autóiparban jelentkező kábelezési problémák költségtakarékos megoldására, de ma már nemzetközi szabvánnyá vált az ISO (nagysebességű alkalmazások) és az ISO (kissebességű alkalmazások) számokon. Számos alacsony árú berendezés vásárolható a vezető elektronika alkatrész gyártóktól, így a járműfejlesztés sokkal olcsóbb lehet. A piacon az elektronikai alkatrészeken kívül teljes fejlesztő eszközök állnak a mérnökök rendelkezésére. Nem csak a járműveken, de az ipari irányítástechnikában, sőt megbízhatósága miatt a gyógyászati műszerek között is terjed. Alkalmazásának terjedésére jellemző, hogy 1995 ben 5,5 millió CAN chipet adtak el, 1996 ban több mint 10 milliót, 1999 ben 140 milliót ban már több mint 3 millió CAN busz működött a járműveken, és további 6 millió ezeken kívül. Megbízhatóságára jellemző, hogy a gyógyászatban például röntgengépek vezérlésénél is használják. Hogyan működik A CAN hálózat a kétvezetékes buszból és a hozzá kapcsolódó úgynevezett csomópontokból áll. Az adatokat leíró bináris információk bitenként sorban haladnak a vezetéken. A csomóponttól származó üzenet nem tartalmazza sem a forrás, sem a cél csomópont címét, csak egy azonosítót. Ez az azonosító tehát nem a cél vagy forrás állomás, hanem az üzenet adattartalmának (például fordulatszám, járműsebesség) azonosítására szolgál. A CAN szabvány (ISO 11898) csak az ISO modell szerinti alsó két réteget írja le. A CAN 27 / 32
28 vezérlőkben az adatkapcsolati réteget általában a hardverben valósítják meg, így kevésbé terhelik a vezérlő számítógépet. Gyakorlati okokból ezt a réteget kétfelé választják, a logikai kapcsolat vezérlésre (Logical Link Control, LLC) és a közeg hozzáférési vezérlésre (Media Access Control, MAC). A fizikai réteg természeténél fogva mindig fizikailag megvalósított, a többi réteg lehet hardveres (azaz chipben megvalósított), vagy szoftveres (programban megvalósított). A logikai adatkapcsolat vezérlése Az adatkapcsolati réteg a felsőbb rétegtől kapott adatot ellátja egy kerettel, és így továbbítja a fizikai rétegnek. A CAN szabványnak ma két változata van használatban, amelyek az adatkeret formátumában különböznek. A 2.0A szabvány szerinti adatkeret hét mezőből áll: SOF: Start Of the Frame, keret kezdet jelző 0 bit. Ha valamely egység küldeni akar, ezt a bitet 0 ra állítja, ezzel a többi egység szinkronizálni tudja az óráját. Arbitration: Döntési mező, több részből áll. Ez szabályozza a közeghozzáférést. ID: Identifier, azonosító mezőből, ez 11 bit hosszú RTR Remote Transmission Request. Amenyiben ez a bit 1, az adatkérést jelent más egységtől, ha 0, akkor a kért adat küldését. Control: Vezérlő mező, ez is több részből áll: r0, r1: későbbi felhasználásra fenntartott két bitből és a DLC: (Data Length Code) mezőből, amely a 4 bites adathossz kód, az adatmező hosszát adja meg. Data: Adatmező, 0 8 byte ( 0 64 bit) adat, ami köré a keret épül. CAN 2.0A adatkeret formátum 28 / 32
29 CRC: Cyclic Redundacy Check code, 15 bites hibaellenőrző és javító kód, 1 határoló bit ACK: ACKnowledge, 2 bites nyugtamező. Az első biten tetszőleges csomópont jelezheti az adatok hibás vételét, a második bit a határoló bit. EOF: End OF Frame, 7 bites keret vége jelzés INT: INTermission, keretek közti mező, 3 db 1 es értékű bit következik, majd a busz szabaddá válik, ha nincs újabb küldendő keret. CAN 2.0B adatkeret formátum A 2.0B szabványban megváltoztatták a döntési mezőt, de ez kompatíbilis maradt a 2.0A szabvánnyal. Az első rész ugyan úgy 11 bites azonosító (ID), ezt követi az SRR (Substitute Remote Request, behelyettesítés távoli kérés) bit, egy IDE bit (ID extended, azonosító kibővítve), majd a 18 bites EID (Extended Identifier, kibővített azonosító), ezt követő rész változatlan maradt, tehát az RTR bit következik. A 2.0A szabvány szerinti CAN vezérlő nem képes a 2.0B keretek fogadására, ilyenkor hibát jelez. A 2.0B vezérlőkből két fajta létezik. passzív 2.0B vezérlők felismerik a 2.0B kereteket, nem jeleznek hibát, de nem is tudják fogadni ezeket. Ilyen esetben a buszon vegyesen mehetnek 2.0A és 2.0B keretek, de a passzív 2.0B vezérlőt tartalmazó csomópontok csak a 2.0A formájú keretekben lévő adatokat tudják elérni. A közeghozzáférés vezérlése Előfordulhat, hogy egyszerre több csomópont kíván adatot küldeni. Ezt azonban a busz kialakítása miatt egyszerre csak egy csomópont teheti meg, különben az adatok összekeverednek. Tehát a csomópontoknak valamilyen módon el kell döntenie, hogy ki férjen hozzá a kommunikációs közeghez. A CAN protokoll ehhez a döntési mezőt használja fel. Az adat legkisebb része a bit, amely 0 vagy 1 lehet. A CAN esetében a 0 a domináns, míg az 1 a receszív. A csomópontok akkor is figyelik a 29 / 32
30 hálózatot, amikor küldenek. Ha egyszerre két csomópont küld, azt addig nem lehet észlelni, amíg egyforma adatokat küldenek. Azonban ha az egyik 0 át, a másik 1 et küld, akkor mindkettő 0 át fog olvasni (a 0 a domináns bit). Ekkor az az állomás, amelyik 1 et küldött, észleli a különbséget, és abbahagyja a forgalmazást. Ez a vetélkedés természetesen csakis a döntési mezőben működik, a keret többi részében nem engedélyezett. Eredménye képen a kisebb azonosítóval rendelkező adat elsőbbséget élvez. Elvileg még egy probléma adódhat! Amikor az egyik egység egy adatkérési keretet küld, és pontosan ekkor a másik egység küldi is a választ. Ekkor a két keret összekeveredne, mivel az azonosítójuk azonos. Azonban az adatkérésnél az RTR bit 1, a válaszkeretben viszont 0, ebből tudja az adatot kérő egység, hogy a válasz pont most érkezik, és abbahagyja a kérés keret forgalmazását. A hozzáférés szabályozásában tehát nem csak az azonosító, de az RTR és a 2.0B hálózatoknál az SRR bit is részt vesz. A döntési mező utolsó bitje az RTR bit. Ennek értéke 1, ha adatkérésre vonatkozik, és 0, ha az adatkérésre válasz. Mivel a 0 a domináns bit, így a válasz csomagok előnyt élveznek a kérésekkel szemben. A 2.0B keretek SRR bitje mindig 1, és azon a helyen áll, ahol a 2.0A keretek nem használt 0 értékű bitjei vannak. Ebből következik, hogy azonos alap azonosítóval (első 11 bit) rendelkező adatok közül a 2.0A típusú keret előnyt élvez a 2.0B típusúval szemben. Most már csak egy probléma maradt megoldatlan! Bizonyos CAN csomópontok alvó üzemmódba léphetnek. Akkor ébrednek csak fel, amikor adatot akarnak küldeni vagy fogadni, de ehhez meg kell találniuk, hogy mikor történik a döntési mező forgalmazása. A megoldás A megoldást a keret vége jelzés és a bitbeszúrás technikája adja. A keret vége jelzés 7 db 1 es értékű bit. Azért, hogy ez egyértelműen felismerhető legyen, a CAN szabvány előírja, hogy az adatmezőben minden 5 db egyforma értékű bit után be kell szúrni egy ellenkező értékűt, kivéve a keretvég jelzésben. A fogadó csomópontok minden 5. egyforma bit utáni bitet automatikusan kiszedik a folyamból, így az már nem is látható a fentebbi rétegek számára. Beszúrt bit Hibát jelző keret: Error Frame 30 / 32
31 Ha egy vevő felismeri a továbbított üzenet hibás voltát, (és mivel az adó egyben vevő is legalább ő észlelni fogja ezt), akkor leadja ezt az üzenetet. Ez 6 egymás utáni domináns bit kiküldésével teszi. Ez normál adatkeretben nem fordulhat elő, így minden résztvevő értesül arról, hogy hibás a busz. Ha más egység is egyetért ezzel, akkor még egy hibajelzést beültet, végül 8 receszív bittel zárul az üzenet. error passive Előfordulhat, hogy a hibaüzenet egyetlen vevő részéről állandóan ismétlődik, ami kiváltja az adó automatikus üzenetismétlését is. Ha ez az állapot 30 bitidőre állandósul, akkor ez a vevő letiltja a saját hibajelzések küldését (error passive), így lehetővé teszi a busz (esetleg még nem sérült) részén az adatforgalmazást Túlterhelést jelző keret Amennyiben valamelyik vevő központi egységének nem áll módjában az érkezett adatok feldolgozása, akkor ezzel az üzenettel megakadályozhatja, hogy a következő, neki szóló üzenet felülírja az előzőleg vett, de még feldolgozatlant. Ehhez 6 domináns és 8 receszív bitet küld ki, de a keretek közötti időzítés más, mint a hibajelzésnél, így a többi résztvevő meg tudja különböztetni. A fizikai kialakítás A kétvezetékest buszt általában árnyékolt vagy árnyékolatlan csavar érpáras (shielded /unshielded twisted pair) vezetékből készítik. Lapos kétvezetékes kábel (telefon kábel) is használható, de ez nagyobb rádiófrekvenciás zavart bocsát ki, és érzékenyebb is arra. Szélsőséges körülmények A szabvány szerint javasolt, hogy a CAN chipek képesek legyenek forgalmazni akkor is, ha a két kábel közül az egyik elszakad vagy zárlatos lesz. Általában olyan a CAN busz kialakítása, hogy ha a mindkét kábel egy ponton sérül, akkor a két különálló CAN busz működőképes lesz. Az ISO szabvány nem korlátozza a kábelhosszat, de ez függ a busz sebességétől. Az ajánlott kábelhosszak a sebesség függvényében a következők: 1000 kbps 40 m, 500 kbps 100 m, 250 kbps 200 m, 125 kbps 500 m. Rugalmasság és bővíthetőség Mivel a keretek nem tartalmaznak címeket, csak adat azonosítókat, az egész rendszer rendkívül rugalmas. A tisztán adatfogadó csomópontok minden további nélkül csatlakoztathatók a rendszerhez. Új jeladóval vagy funkcióval könnyen bővíthető a rendszer, de ha a meglévő csomópontokon ezeket az adatokat fel kívánják használni, akkor azon a szoftver cseréje szükséges. A rendszer rendkívül előnyös abban az esetben, ha egy jeladó által mért adatot több, esetleg opcionális vezérlőegység kívánja felhasználni. Az egyszer elküldött adatot egyszerre tetszőleges számú csomópont vehetni. A CAN re épülő magasabb szintű hálózati protokollok 31 / 32
32 A CAN busz előnyei akkor használhatók ki igazán, ha az alkalmazók megegyeznek olyan dolgokban is, amelyet az ISO nem ír elő. Egyik legfontosabb dolog a különböző azonosítók jelentése. Az ISO csak annyit biztosít, hogy a kisebb azonosítóval rendelkező adat nagyobb prioritást élvez. Ha a járműgyártók megegyeznek egy állandó azonosító adat összerendelésben, akkor a beszállítók nagyobb darabszámban, tehát olcsóbban tudnak előállítani alkatrészeket, és ezek akkor is csereszabatosak lehetnek, ha más gyártótól származnak. Viszont a rendszereik nyitottabbak, így nehezebben tudják biztosítani a márkaszervizeik előnyét. Gyártói előírások A gyártók néhány ilyen előírást létrehoztak már. Az elsők között volt a BMW gyár CAN11 nevű rendszere, amely a 2.0A s 11 bites azonosítókon alapult. A 11 bit összesen 2048 lehetséges kombinációt engedélyez, ami egy egy járművön elegendő, de általános esetben már kevésnek bizonyul. Ezért hozták létre a 2.0B s változatot 29 bites azonosítóval, amely már több mint 536 millió kombinációt tesz lehetővé. Ezt kihasználva az európai járműgyártók egy OSEK nevű szabványon dolgoznak, a USA ban a SAE pedig létrehozta a SAE J1939 es számú, úgynevezett "Big Red Book" ot, azaz a nagy piros könyvet. Céljuk a CAN azonosítók logikus és egységes kiosztása. A CAN buszt nem csak a járműtechnikában, de az iparban is használják. Ott is alakultak ki magasabb szintű protokollok, mint például a DeviceNet. 32 / 32
Beágyazott rendszerek KMABR11TNC Tematika. http://www.hik.hu/tankonyvtar/site/books/b10096/index.html
 Beágyazott rendszerek KMABR11TNC Tematika Beágyazott rendszerek felépítése Beágyazott rendszerek szoftver vonatkozásai Beágyazott rendszerek hardver vonatkozásai Beágyazott rendszerek tervezése http://www.hik.hu/tankonyvtar/site/books/b10096/index.html
Beágyazott rendszerek KMABR11TNC Tematika Beágyazott rendszerek felépítése Beágyazott rendszerek szoftver vonatkozásai Beágyazott rendszerek hardver vonatkozásai Beágyazott rendszerek tervezése http://www.hik.hu/tankonyvtar/site/books/b10096/index.html
Programozható vezérlő rendszerek KOMMUNIKÁCIÓS HÁLÓZATOK 2.
 KOMMUNIKÁCIÓS HÁLÓZATOK 2. CAN busz - Autóipari alkalmazásokhoz fejlesztették a 80-as években - Elsőként a BOSCH vállalat fejlesztette - 1993-ban szabvány (ISO 11898: 1993) - Később fokozatosan az iparban
KOMMUNIKÁCIÓS HÁLÓZATOK 2. CAN busz - Autóipari alkalmazásokhoz fejlesztették a 80-as években - Elsőként a BOSCH vállalat fejlesztette - 1993-ban szabvány (ISO 11898: 1993) - Később fokozatosan az iparban
Autóipari beágyazott rendszerek. Local Interconnection Network
 Autóipari beágyazott rendszerek Local Interconnection Network 1 Áttekintés Motiváció Kis sebességigényű alkalmazások A CAN drága Kvarc oszcillátort igényel Speciális perifériát igényel Két vezetéket igényel
Autóipari beágyazott rendszerek Local Interconnection Network 1 Áttekintés Motiváció Kis sebességigényű alkalmazások A CAN drága Kvarc oszcillátort igényel Speciális perifériát igényel Két vezetéket igényel
Járműfedélzeti rendszerek II. 6. előadás Dr. Bécsi Tamás
 Járműfedélzeti rendszerek II. 6. előadás Dr. Bécsi Tamás A CAN hálózat Az első szabványos autóipari kommunikációs hálózat Bosch fejlesztés, 1986 SAE (Society of Automotive Engineers) congress 1991 CAN
Járműfedélzeti rendszerek II. 6. előadás Dr. Bécsi Tamás A CAN hálózat Az első szabványos autóipari kommunikációs hálózat Bosch fejlesztés, 1986 SAE (Society of Automotive Engineers) congress 1991 CAN
I+K technológiák. Buszrendszerek Dr. Aradi Szilárd
 I+K technológiák Buszrendszerek Dr. Aradi Szilárd TIA/EIA-485-A (RS-485) Az RS-485 szabványt 1983-ban jelentette meg az EIA, és a szabvány legutolsó felülvizsgálata 1998-ban történt Az automatizálástechnikában
I+K technológiák Buszrendszerek Dr. Aradi Szilárd TIA/EIA-485-A (RS-485) Az RS-485 szabványt 1983-ban jelentette meg az EIA, és a szabvány legutolsó felülvizsgálata 1998-ban történt Az automatizálástechnikában
A CAN mint ipari kommunikációs protokoll CAN as industrial communication protocol
 A CAN mint ipari kommunikációs protokoll CAN as industrial communication protocol Attila FODOR 1), Dénes FODOR Dr. 1), Károly Bíró Dr. 2), Loránd Szabó Dr. 2) 1) Pannon Egyetem, H-8200 Veszprém Egyetem
A CAN mint ipari kommunikációs protokoll CAN as industrial communication protocol Attila FODOR 1), Dénes FODOR Dr. 1), Károly Bíró Dr. 2), Loránd Szabó Dr. 2) 1) Pannon Egyetem, H-8200 Veszprém Egyetem
Számítógép felépítése
 Alaplap, processzor Számítógép felépítése Az alaplap A számítógép teljesítményét alapvetően a CPU és belső busz sebessége (a belső kommunikáció sebessége), a memória mérete és típusa, a merevlemez sebessége
Alaplap, processzor Számítógép felépítése Az alaplap A számítógép teljesítményét alapvetően a CPU és belső busz sebessége (a belső kommunikáció sebessége), a memória mérete és típusa, a merevlemez sebessége
Mikrorendszerek tervezése
 BUDAPESTI MŰSZAKI ÉS GAZDASÁGTUDOMÁNYI EGYETEM VILLAMOSMÉRNÖKI ÉS INFORMATIKAI KAR MÉRÉSTECHNIKA ÉS INFORMÁCIÓS RENDSZEREK TANSZÉK Mikrorendszerek tervezése Beágyazott rendszerek Fehér Béla Raikovich Tamás
BUDAPESTI MŰSZAKI ÉS GAZDASÁGTUDOMÁNYI EGYETEM VILLAMOSMÉRNÖKI ÉS INFORMATIKAI KAR MÉRÉSTECHNIKA ÉS INFORMÁCIÓS RENDSZEREK TANSZÉK Mikrorendszerek tervezése Beágyazott rendszerek Fehér Béla Raikovich Tamás
Járműfedélzeti kommunikáció. Controller Area Network Dr. Aradi Szilárd
 Járműfedélzeti kommunikáció Controller Area Network Dr. Aradi Szilárd A CAN hálózat Az első szabványos autóipari kommunikációs hálózat Bosch fejlesztés, 1986 SAE (Society of Automotive Engineers) congress
Járműfedélzeti kommunikáció Controller Area Network Dr. Aradi Szilárd A CAN hálózat Az első szabványos autóipari kommunikációs hálózat Bosch fejlesztés, 1986 SAE (Society of Automotive Engineers) congress
Járműinformatika Multimédiás buszrendszerek (MOST, D2B és Bluetooth) 4. Óra
 4. Óra") Járműinformatika Multimédiás buszrendszerek (MOST, D2B és Bluetooth) 4. Óra Multimédiás adatok továbbítása és annak céljai Mozgókép és hang átvitele Szórakoztató elektronika Biztonsági funkciókat megvalósító
Járműinformatika Multimédiás buszrendszerek (MOST, D2B és Bluetooth) 4. Óra Multimédiás adatok továbbítása és annak céljai Mozgókép és hang átvitele Szórakoztató elektronika Biztonsági funkciókat megvalósító
OPERÁCIÓS RENDSZEREK. Elmélet
 1. OPERÁCIÓS RENDSZEREK Elmélet BEVEZETÉS 2 Az operációs rendszer fogalma Az operációs rendszerek feladatai Csoportosítás BEVEZETÉS 1. A tantárgy tananyag tartalma 2. Operációs rendszerek régen és most
1. OPERÁCIÓS RENDSZEREK Elmélet BEVEZETÉS 2 Az operációs rendszer fogalma Az operációs rendszerek feladatai Csoportosítás BEVEZETÉS 1. A tantárgy tananyag tartalma 2. Operációs rendszerek régen és most
Megoldás. Feladat 1. Statikus teszt Specifikáció felülvizsgálat
 Megoldás Feladat 1. Statikus teszt Specifikáció felülvizsgálat A feladatban szereplő specifikáció eredeti, angol nyelvű változata egy létező eszköz leírása. Nem állítjuk, hogy az eredeti dokumentum jól
Megoldás Feladat 1. Statikus teszt Specifikáció felülvizsgálat A feladatban szereplő specifikáció eredeti, angol nyelvű változata egy létező eszköz leírása. Nem állítjuk, hogy az eredeti dokumentum jól
Hálózati ismeretek. Az együttműködés szükségessége:
 Stand alone Hálózat (csoport) Az együttműködés szükségessége: közös adatok elérése párhuzamosságok elkerülése gyors eredményközlés perifériák kihasználása kommunikáció elősegítése 2010/2011. őszi félév
Stand alone Hálózat (csoport) Az együttműködés szükségessége: közös adatok elérése párhuzamosságok elkerülése gyors eredményközlés perifériák kihasználása kommunikáció elősegítése 2010/2011. őszi félév
Járműfedélzeti hálózatok. Fedélzeti diagnosztikai protokollok Dr. Aradi Szilárd
 Járműfedélzeti hálózatok Fedélzeti diagnosztikai protokollok Dr. Aradi Szilárd A fedélzeti diagnosztika fogalma On-Board Diagnostics (OBD I-II, EOBD) Motiváció Általánosságban információt szolgáltat a
Járműfedélzeti hálózatok Fedélzeti diagnosztikai protokollok Dr. Aradi Szilárd A fedélzeti diagnosztika fogalma On-Board Diagnostics (OBD I-II, EOBD) Motiváció Általánosságban információt szolgáltat a
Programozó- készülék Kezelőkozol RT óra (pl. PC) Digitális bemenetek ROM memória Digitális kimenetek RAM memória Analóg bemenet Analóg kimenet
 Digitális bemenetek ROM memória Digitális kimenetek RAM memória Analóg bemenet Analóg kimenet") 2. ZH A csoport 1. Hogyan adható meg egy digitális műszer pontossága? (3p) Digitális műszereknél a pontosságot két adattal lehet megadni: Az osztályjel ±%-os értékével, és a ± digit értékkel (jellemző
2. ZH A csoport 1. Hogyan adható meg egy digitális műszer pontossága? (3p) Digitális műszereknél a pontosságot két adattal lehet megadni: Az osztályjel ±%-os értékével, és a ± digit értékkel (jellemző
Alapszintű formalizmusok
 Alapszintű formalizmusok dr. Majzik István BME Méréstechnika és Információs Rendszerek Tanszék 1 Mit szeretnénk elérni? Informális tervek Informális követelmények Formális modell Formalizált követelmények
Alapszintű formalizmusok dr. Majzik István BME Méréstechnika és Információs Rendszerek Tanszék 1 Mit szeretnénk elérni? Informális tervek Informális követelmények Formális modell Formalizált követelmények
Digitális technika (VIMIAA01) Laboratórium 9
 Laboratórium 9") BUDAPESTI MŰSZAKI ÉS GAZDASÁGTUDOMÁNYI EGYETEM VILLAMOSMÉRNÖKI ÉS INFORMATIKAI KAR MÉRÉSTECHNIKA ÉS INFORMÁCIÓS RENDSZEREK TANSZÉK Digitális technika (VIMIAA01) Laboratórium 9 Fehér Béla Raikovich Tamás,
BUDAPESTI MŰSZAKI ÉS GAZDASÁGTUDOMÁNYI EGYETEM VILLAMOSMÉRNÖKI ÉS INFORMATIKAI KAR MÉRÉSTECHNIKA ÉS INFORMÁCIÓS RENDSZEREK TANSZÉK Digitális technika (VIMIAA01) Laboratórium 9 Fehér Béla Raikovich Tamás,
Számítógépes Hálózatok. 5. gyakorlat
 Számítógépes Hálózatok 5. gyakorlat Feladat 0 Számolja ki a CRC kontrollösszeget az 11011011001101000111 üzenetre, ha a generátor polinom x 4 +x 3 +x+1! Mi lesz a 4 bites kontrollösszeg? A fenti üzenet
Számítógépes Hálózatok 5. gyakorlat Feladat 0 Számolja ki a CRC kontrollösszeget az 11011011001101000111 üzenetre, ha a generátor polinom x 4 +x 3 +x+1! Mi lesz a 4 bites kontrollösszeg? A fenti üzenet
10. fejezet Az adatkapcsolati réteg
 10. fejezet Az adatkapcsolati réteg Az adatkapcsolati réteg (Data Link Layer) Előzetesen összefoglalva, az adatkapcsolati réteg feladata abban áll, hogy biztosítsa azt, hogy az adó oldali adatok a vevő
10. fejezet Az adatkapcsolati réteg Az adatkapcsolati réteg (Data Link Layer) Előzetesen összefoglalva, az adatkapcsolati réteg feladata abban áll, hogy biztosítsa azt, hogy az adó oldali adatok a vevő
TELE-OPERATOR UTS v.14 Field IPTV műszer. Adatlap
 TELE-OPERATOR UTS v.14 Field IPTV műszer Adatlap COMPU-CONSULT Kft. 2009. augusztus 3. Dokumentáció Tárgy: TELE-OPERATOR UTS v.14 Field IPTV műszer Adatlap (6. kiadás) Kiadta: CONSULT-CONSULT Kft. Dátum:
TELE-OPERATOR UTS v.14 Field IPTV műszer Adatlap COMPU-CONSULT Kft. 2009. augusztus 3. Dokumentáció Tárgy: TELE-OPERATOR UTS v.14 Field IPTV műszer Adatlap (6. kiadás) Kiadta: CONSULT-CONSULT Kft. Dátum:
Roger UT-2. Kommunikációs interfész V3.0
 ROGER UT-2 1 Roger UT-2 Kommunikációs interfész V3.0 TELEPÍTŐI KÉZIKÖNYV ROGER UT-2 2 ÁLTALÁNOS LEÍRÁS Az UT-2 elektromos átalakítóként funkcionál az RS232 és az RS485 kommunikációs interfész-ek között.
ROGER UT-2 1 Roger UT-2 Kommunikációs interfész V3.0 TELEPÍTŐI KÉZIKÖNYV ROGER UT-2 2 ÁLTALÁNOS LEÍRÁS Az UT-2 elektromos átalakítóként funkcionál az RS232 és az RS485 kommunikációs interfész-ek között.
Autóipari beágyazott rendszerek. A kommunikáció alapjai
 Autóipari beágyazott rendszerek A kommunikáció alapjai 1 Alapfogalmak Hálózati kommunikáció Vezérlőegységek közötti információ továbbítás Csomópontok Kommunikációs csatornákon keresztül Terepbuszok (cluster)
Autóipari beágyazott rendszerek A kommunikáció alapjai 1 Alapfogalmak Hálózati kommunikáció Vezérlőegységek közötti információ továbbítás Csomópontok Kommunikációs csatornákon keresztül Terepbuszok (cluster)
Szárazföldi autonóm mobil robotok vezérlőrendszerének kialakítási lehetőségei. Kucsera Péter ZMNE Doktorandusz
 Szárazföldi autonóm mobil robotok vezérlőrendszerének kialakítási lehetőségei. Kucsera Péter ZMNE Doktorandusz A mobil robot vezérlőrendszerének feladatai Elvégzendő feladat Kommunikáció Vezérlő rendszer
Szárazföldi autonóm mobil robotok vezérlőrendszerének kialakítási lehetőségei. Kucsera Péter ZMNE Doktorandusz A mobil robot vezérlőrendszerének feladatai Elvégzendő feladat Kommunikáció Vezérlő rendszer
AGSMHÁLÓZATA TOVÁBBFEJLESZTÉSE A NAGYOBB
 AGSMHÁLÓZATA TOVÁBBFEJLESZTÉSE A NAGYOBB ADATSEBESSÉG ÉS CSOMAGKAPCSOLÁS FELÉ 2011. május 19., Budapest HSCSD - (High Speed Circuit-Switched Data) A rendszer négy 14,4 kbit/s-os átviteli időrés összekapcsolásával
AGSMHÁLÓZATA TOVÁBBFEJLESZTÉSE A NAGYOBB ADATSEBESSÉG ÉS CSOMAGKAPCSOLÁS FELÉ 2011. május 19., Budapest HSCSD - (High Speed Circuit-Switched Data) A rendszer négy 14,4 kbit/s-os átviteli időrés összekapcsolásával
Hálózatok. Alapismeretek. A hálózatok célja, építőelemei, alapfogalmak
 Hálózatok Alapismeretek A hálózatok célja, építőelemei, alapfogalmak A hálózatok célja A korai időkben terminálokat akartak használni a szabad gépidők lekötésére, erre jó lehetőség volt a megbízható és
Hálózatok Alapismeretek A hálózatok célja, építőelemei, alapfogalmak A hálózatok célja A korai időkben terminálokat akartak használni a szabad gépidők lekötésére, erre jó lehetőség volt a megbízható és
Számítógépes Hálózatok 2010
 Számítógépes Hálózatok 2010 5. Adatkapcsolati réteg MAC, Statikus multiplexálás, (slotted) Aloha, CSMA 1 Mediumhozzáférés (Medium Access Control -- MAC) alréteg az adatkapcsolati rétegben Statikus multiplexálás
Számítógépes Hálózatok 2010 5. Adatkapcsolati réteg MAC, Statikus multiplexálás, (slotted) Aloha, CSMA 1 Mediumhozzáférés (Medium Access Control -- MAC) alréteg az adatkapcsolati rétegben Statikus multiplexálás
Számítógépes Hálózatok. 4. gyakorlat
 Számítógépes Hálózatok 4. gyakorlat Feladat 0 Számolja ki a CRC kontrollösszeget az 11011011001101000111 üzenetre, ha a generátor polinom x 4 +x 3 +x+1! Mi lesz a 4 bites kontrollösszeg? A fenti üzenet
Számítógépes Hálózatok 4. gyakorlat Feladat 0 Számolja ki a CRC kontrollösszeget az 11011011001101000111 üzenetre, ha a generátor polinom x 4 +x 3 +x+1! Mi lesz a 4 bites kontrollösszeg? A fenti üzenet
Operációs rendszerek. Bemutatkozás
 Bevezetés az operációs rendszerek világába dr. Benyó Balázs benyo@sze.hu Bemutatkozás www.sze.hu/~benyo 1 Számítógép HW-SW felépítése felhasználó felhasználó felhasználó Operációs rendszer Operációs rendszer
Bevezetés az operációs rendszerek világába dr. Benyó Balázs benyo@sze.hu Bemutatkozás www.sze.hu/~benyo 1 Számítógép HW-SW felépítése felhasználó felhasználó felhasználó Operációs rendszer Operációs rendszer
Tartalom. Az adatkapcsolati réteg, Ethernet, ARP. Fogalma és feladatai. Adatkapcsolati réteg. A hálókártya képe
 Tartalom Az adatkapcsolati réteg, Ethernet, ARP Adatkapcsolati réteg A hálózati kártya (NIC-card) Ethernet ARP Az ARP protokoll Az ARP protokoll által beírt adatok Az ARP parancs Az ARP folyamat alhálózaton
Tartalom Az adatkapcsolati réteg, Ethernet, ARP Adatkapcsolati réteg A hálózati kártya (NIC-card) Ethernet ARP Az ARP protokoll Az ARP protokoll által beírt adatok Az ARP parancs Az ARP folyamat alhálózaton
Nagy Gergely április 4.
 Mikrovezérlők Nagy Gergely BME EET 2012. április 4. ebook ready 1 Bevezetés Áttekintés Az elektronikai tervezés eszközei Mikroprocesszorok 2 A mikrovezérlők 3 Főbb gyártók Áttekintés A mikrovezérlők az
Mikrovezérlők Nagy Gergely BME EET 2012. április 4. ebook ready 1 Bevezetés Áttekintés Az elektronikai tervezés eszközei Mikroprocesszorok 2 A mikrovezérlők 3 Főbb gyártók Áttekintés A mikrovezérlők az
INVERSE MULTIPLEXER RACK
 SP 7505 Tartalomjegyzék...1 Általános ismertetés...2 Követelmények...2 Felépítése és működése...3 Beállítások...3 Felügyelet...3 Csatlakozók...3 Kijelzők...3 Műszaki adatok:...4 G703 felület:...4 LAN felület:...4
SP 7505 Tartalomjegyzék...1 Általános ismertetés...2 Követelmények...2 Felépítése és működése...3 Beállítások...3 Felügyelet...3 Csatlakozók...3 Kijelzők...3 Műszaki adatok:...4 G703 felület:...4 LAN felület:...4
Digitális technika (VIMIAA01) Laboratórium 9
 Laboratórium 9") BUDAPESTI MŰSZAKI ÉS GAZDASÁGTUDOMÁNYI EGYETEM VILLAMOSMÉRNÖKI ÉS INFORMATIKAI KAR MÉRÉSTECHNIKA ÉS INFORMÁCIÓS RENDSZEREK TANSZÉK Digitális technika (VIMIAA01) Laboratórium 9 Fehér Béla Raikovich Tamás,
BUDAPESTI MŰSZAKI ÉS GAZDASÁGTUDOMÁNYI EGYETEM VILLAMOSMÉRNÖKI ÉS INFORMATIKAI KAR MÉRÉSTECHNIKA ÉS INFORMÁCIÓS RENDSZEREK TANSZÉK Digitális technika (VIMIAA01) Laboratórium 9 Fehér Béla Raikovich Tamás,
Csoportos üzenetszórás optimalizálása klaszter rendszerekben
 Csoportos üzenetszórás optimalizálása klaszter rendszerekben Készítette: Juhász Sándor Csikvári András Budapesti Műszaki és Gazdaságtudományi Egyetem Villamosmérnöki és Informatikai Kar Automatizálási
Csoportos üzenetszórás optimalizálása klaszter rendszerekben Készítette: Juhász Sándor Csikvári András Budapesti Műszaki és Gazdaságtudományi Egyetem Villamosmérnöki és Informatikai Kar Automatizálási
Autóipari beágyazott rendszerek CAN hardver
 Scherer Balázs, Tóth Csaba: Autóipari beágyazott rendszerek CAN hardver Előadásvázlat Kézirat Csak belső használatra! 2012.02.19. SchB, TCs BME MIT 2012. Csak belső használatra! Autóipari beágyazott rendszerek
Scherer Balázs, Tóth Csaba: Autóipari beágyazott rendszerek CAN hardver Előadásvázlat Kézirat Csak belső használatra! 2012.02.19. SchB, TCs BME MIT 2012. Csak belső használatra! Autóipari beágyazott rendszerek
Szenzorhálózatok programfejlesztési kérdései. Orosz György
 Szenzorhálózatok programfejlesztési kérdései Orosz György 2011. 09. 30. Szoftverfejlesztési alternatívák Erőforráskorlátok! (CPU, MEM, Energia) PC-től eltérő felfogás: HW közeli programozás Eszközök közvetlen
Szenzorhálózatok programfejlesztési kérdései Orosz György 2011. 09. 30. Szoftverfejlesztési alternatívák Erőforráskorlátok! (CPU, MEM, Energia) PC-től eltérő felfogás: HW közeli programozás Eszközök közvetlen
elektronikus adattárolást memóriacím
 MEMÓRIA Feladata A memória elektronikus adattárolást valósít meg. A számítógép csak olyan műveletek elvégzésére és csak olyan adatok feldolgozására képes, melyek a memóriájában vannak. Az információ tárolása
MEMÓRIA Feladata A memória elektronikus adattárolást valósít meg. A számítógép csak olyan műveletek elvégzésére és csak olyan adatok feldolgozására képes, melyek a memóriájában vannak. Az információ tárolása
SYS700-PLM Power Line Monitor modul DDC rendszerelemek, DIALOG-III család
 DDC rendszerelemek, DIALOG-III család KIVITEL ALKALMAZÁS A az energiaellátás minőségi jellemzőinek mérésére szolgáló szabadon programozható készülék. Épületfelügyeleti rendszerben (BMS), valamint önállóan
DDC rendszerelemek, DIALOG-III család KIVITEL ALKALMAZÁS A az energiaellátás minőségi jellemzőinek mérésére szolgáló szabadon programozható készülék. Épületfelügyeleti rendszerben (BMS), valamint önállóan
A számítógép fő részei
 Hardver ismeretek 1 A számítógép fő részei 1. A számítógéppel végzett munka folyamata: bevitel ==> tárolás ==> feldolgozás ==> kivitel 2. A számítógépet 3 fő részre bonthatjuk: központi egységre; perifériákra;
Hardver ismeretek 1 A számítógép fő részei 1. A számítógéppel végzett munka folyamata: bevitel ==> tárolás ==> feldolgozás ==> kivitel 2. A számítógépet 3 fő részre bonthatjuk: központi egységre; perifériákra;
A PET-adatgy informatikai háttereh. Nagy Ferenc Elektronikai osztály, ATOMKI
 A PET-adatgy adatgyűjtés informatikai háttereh Nagy Ferenc Elektronikai osztály, ATOMKI Eleveníts tsük k fel, hogy mi is az a PET! Pozitron Emissziós s Tomográfia Pozitron-boml bomló maggal nyomjelzünk
A PET-adatgy adatgyűjtés informatikai háttereh Nagy Ferenc Elektronikai osztály, ATOMKI Eleveníts tsük k fel, hogy mi is az a PET! Pozitron Emissziós s Tomográfia Pozitron-boml bomló maggal nyomjelzünk
4.1.1. I 2 C, SPI, I 2 S, USB, PWM, UART, IrDA
 4.1.1. I 2 C, SPI, I 2 S, USB, PWM, UART, IrDA A címben található jelölések a mikrovezérlők kimentén megjelenő tipikus perifériák, típus jelzései. Mindegyikkel röviden foglalkozni fogunk a folytatásban.
4.1.1. I 2 C, SPI, I 2 S, USB, PWM, UART, IrDA A címben található jelölések a mikrovezérlők kimentén megjelenő tipikus perifériák, típus jelzései. Mindegyikkel röviden foglalkozni fogunk a folytatásban.
Autóipari beágyazott rendszerek. Komponens és rendszer integráció
 Autóipari beágyazott rendszerek és rendszer integráció 1 Magas szintű fejlesztési folyamat SW architektúra modellezés Modell (VFB) Magas szintű modellezés komponensek portok interfészek adattípusok meghatározása
Autóipari beágyazott rendszerek és rendszer integráció 1 Magas szintű fejlesztési folyamat SW architektúra modellezés Modell (VFB) Magas szintű modellezés komponensek portok interfészek adattípusok meghatározása
DIGITÁLIS TECHNIKA 7. Előadó: Dr. Oniga István
 IGITÁLIS TECHNIKA 7 Előadó: r. Oniga István Szekvenciális (sorrendi) hálózatok Szekvenciális hálózatok fogalma Tárolók S tárolók JK tárolók T és típusú tárolók Számlálók Szinkron számlálók Aszinkron számlálók
IGITÁLIS TECHNIKA 7 Előadó: r. Oniga István Szekvenciális (sorrendi) hálózatok Szekvenciális hálózatok fogalma Tárolók S tárolók JK tárolók T és típusú tárolók Számlálók Szinkron számlálók Aszinkron számlálók
CAN BUSZ ÁLTALÁNOS ISMERTETŐ
 CAN BUSZ ÁLTALÁNOS ISMERTETŐ 1. KIADÁS 2009 Szerző: Somlyai László Kandó Kálmán Villamosmérnöki Kar, IV. évfolyam oldal 1 Tartalomjegyzék 1. Bevezetés... 3 2. CAN busz... 4 2.1. Kialakulása... 4 2.2. Fizikai
CAN BUSZ ÁLTALÁNOS ISMERTETŐ 1. KIADÁS 2009 Szerző: Somlyai László Kandó Kálmán Villamosmérnöki Kar, IV. évfolyam oldal 1 Tartalomjegyzék 1. Bevezetés... 3 2. CAN busz... 4 2.1. Kialakulása... 4 2.2. Fizikai
Számítógép architektúra
 Budapesti Műszaki Főiskola Regionális Oktatási és Innovációs Központ Székesfehérvár Számítógép architektúra Dr. Seebauer Márta főiskolai tanár seebauer.marta@roik.bmf.hu Irodalmi források Cserny L.: Számítógépek
Budapesti Műszaki Főiskola Regionális Oktatási és Innovációs Központ Székesfehérvár Számítógép architektúra Dr. Seebauer Márta főiskolai tanár seebauer.marta@roik.bmf.hu Irodalmi források Cserny L.: Számítógépek
Ismerkedjünk tovább a számítógéppel. Alaplap és a processzeor
 Ismerkedjünk tovább a számítógéppel Alaplap és a processzeor Neumann-elvű számítógépek főbb egységei A részek feladatai: Központi egység: Feladata a számítógép vezérlése, és a számítások elvégzése. Operatív
Ismerkedjünk tovább a számítógéppel Alaplap és a processzeor Neumann-elvű számítógépek főbb egységei A részek feladatai: Központi egység: Feladata a számítógép vezérlése, és a számítások elvégzése. Operatív
1 Járműipari hálózatok
 1 Járműipari hálózatok 1.1 Járműipari kommunikációs technológiák összehasonlítása A járműelektronika viharos fejlődése az utóbbi évtizedekben egyre több új, elektronikusan támogatott funkció megjelenését
1 Járműipari hálózatok 1.1 Járműipari kommunikációs technológiák összehasonlítása A járműelektronika viharos fejlődése az utóbbi évtizedekben egyre több új, elektronikusan támogatott funkció megjelenését
BEÁGYAZOTT RENDSZEREK TERVEZÉSE UDP csomag küldése és fogadása beágyazott rendszerrel példa
 BEÁGYAZOTT RENDSZEREK TERVEZÉSE 1 feladat: A Netburner MOD5270 fejlesztőlap segítségével megvalósítani csomagok küldését és fogadását a fejlesztőlap és egy PC számítógép között. megoldás: A fejlesztőlapra,
BEÁGYAZOTT RENDSZEREK TERVEZÉSE 1 feladat: A Netburner MOD5270 fejlesztőlap segítségével megvalósítani csomagok küldését és fogadását a fejlesztőlap és egy PC számítógép között. megoldás: A fejlesztőlapra,
Adatkapcsolati réteg 1
 Adatkapcsolati réteg 1 Főbb feladatok Jól definiált szolgáltatási interfész biztosítása a hálózati rétegnek Az átviteli hibák kezelése Az adatforgalom szabályozása, hogy a lassú vevőket ne árasszák el
Adatkapcsolati réteg 1 Főbb feladatok Jól definiált szolgáltatási interfész biztosítása a hálózati rétegnek Az átviteli hibák kezelése Az adatforgalom szabályozása, hogy a lassú vevőket ne árasszák el
Központi vezérlőegység
 Központi vezérlőegység A számítógép agya a központi vezérlőegység (CPU: Central Processing Unit). Két fő része a vezérlőegység (CU: Controll Unit), ami a memóriában tárolt program dekódolását és végrehajtását
Központi vezérlőegység A számítógép agya a központi vezérlőegység (CPU: Central Processing Unit). Két fő része a vezérlőegység (CU: Controll Unit), ami a memóriában tárolt program dekódolását és végrehajtását
Számítógép hálózatok gyakorlat
 Számítógép hálózatok gyakorlat 5. Gyakorlat Ethernet alapok Ethernet Helyi hálózatokat leíró de facto szabvány A hálózati szabványokat az IEEE bizottságok kezelik Ezekről nevezik el őket Az Ethernet így
Számítógép hálózatok gyakorlat 5. Gyakorlat Ethernet alapok Ethernet Helyi hálózatokat leíró de facto szabvány A hálózati szabványokat az IEEE bizottságok kezelik Ezekről nevezik el őket Az Ethernet így
Bevezetés. Számítógép-hálózatok. Dr. Lencse Gábor. egyetemi docens Széchenyi István Egyetem, Távközlési Tanszék
 Bevezetés Számítógép-hálózatok Dr. Lencse Gábor egyetemi docens Széchenyi István Egyetem, Távközlési Tanszék lencse@sze.hu Tartalom Alapfogalmak, definíciók Az OSI és a TCP/IP referenciamodell Hálózati
Bevezetés Számítógép-hálózatok Dr. Lencse Gábor egyetemi docens Széchenyi István Egyetem, Távközlési Tanszék lencse@sze.hu Tartalom Alapfogalmak, definíciók Az OSI és a TCP/IP referenciamodell Hálózati
Mérési jegyzőkönyv. az ötödik méréshez
 Mérési jegyzőkönyv az ötödik méréshez A mérés időpontja: 2007-10-30 A mérést végezték: Nyíri Gábor kdu012 mérőcsoport A mérést vezető oktató neve: Szántó Péter A jegyzőkönyvet tartalmazó fájl neve: ikdu0125.doc
Mérési jegyzőkönyv az ötödik méréshez A mérés időpontja: 2007-10-30 A mérést végezték: Nyíri Gábor kdu012 mérőcsoport A mérést vezető oktató neve: Szántó Péter A jegyzőkönyvet tartalmazó fájl neve: ikdu0125.doc
Számítógépek felépítése, alapfogalmak
 2. előadás Számítógépek felépítése, alapfogalmak Lovas Szilárd, Krankovits Melinda SZE MTK MSZT kmelinda@sze.hu B607 szoba Nem reprezentatív felmérés kinek van ilyen számítógépe? 2 Nem reprezentatív felmérés
2. előadás Számítógépek felépítése, alapfogalmak Lovas Szilárd, Krankovits Melinda SZE MTK MSZT kmelinda@sze.hu B607 szoba Nem reprezentatív felmérés kinek van ilyen számítógépe? 2 Nem reprezentatív felmérés
Lokális hálózatok. A lokális hálózat felépítése. Logikai felépítés
 Lokális hálózatok Számítógép hálózat: több számítógép összekapcsolása o üzenetküldés o adatátvitel o együttműködés céljából. Egyszerű példa: két számítógépet a párhuzamos interface csatlakozókon keresztül
Lokális hálózatok Számítógép hálózat: több számítógép összekapcsolása o üzenetküldés o adatátvitel o együttműködés céljából. Egyszerű példa: két számítógépet a párhuzamos interface csatlakozókon keresztül
Valós idejű kiberfizikai rendszerek 5G infrastruktúrában
 Valós idejű kiberfizikai rendszerek 5G infrastruktúrában dr. Kovácsházy Tamás BME-MIT khazy@mit.bme.hu 1 Kiberfizikai rendszer (CPS, Cyber-Physical System) Egy olyan elosztott, kiterjedt informatikai és
Valós idejű kiberfizikai rendszerek 5G infrastruktúrában dr. Kovácsházy Tamás BME-MIT khazy@mit.bme.hu 1 Kiberfizikai rendszer (CPS, Cyber-Physical System) Egy olyan elosztott, kiterjedt informatikai és
loop() Referencia: https://www.arduino.cc/en/reference/homepage
 Referencia: https://www.arduino.cc/en/reference/homepage") Arduino alapok Sketch ~ Solution Forrás:.ino (1.0 előtt.pde).c,.cpp,.h Külső könyvtárak (legacy / 3rd party) Mintakódok (example) setup() Induláskor fut le, kezdeti értékeket állít be, inicializálja a
Arduino alapok Sketch ~ Solution Forrás:.ino (1.0 előtt.pde).c,.cpp,.h Külső könyvtárak (legacy / 3rd party) Mintakódok (example) setup() Induláskor fut le, kezdeti értékeket állít be, inicializálja a
Új kompakt X20 vezérlő integrált I/O pontokkal
 Új kompakt X20 vezérlő integrált I/O pontokkal Integrált flash 4GB belső 16 kb nem felejtő RAM B&R tovább bővíti a nagy sikerű X20 vezérlő családot, egy kompakt vezérlővel, mely integrált be és kimeneti
Új kompakt X20 vezérlő integrált I/O pontokkal Integrált flash 4GB belső 16 kb nem felejtő RAM B&R tovább bővíti a nagy sikerű X20 vezérlő családot, egy kompakt vezérlővel, mely integrált be és kimeneti
Számítógépes hálózatok
 1 Számítógépes hálózatok Hálózat fogalma A hálózat a számítógépek közötti kommunikációs rendszer. Miért érdemes több számítógépet összekapcsolni? Milyen érvek szólnak a hálózat kiépítése mellett? Megoszthatók
1 Számítógépes hálózatok Hálózat fogalma A hálózat a számítógépek közötti kommunikációs rendszer. Miért érdemes több számítógépet összekapcsolni? Milyen érvek szólnak a hálózat kiépítése mellett? Megoszthatók
Laborgyakorlat Logikai áramkörök számítógéppel segített tervezése (CAD)
") Laborgyakorlat Logikai áramkörök számítógéppel segített tervezése (CAD) Multiplexer (MPX) A multiplexer egy olyan áramkör, amely több bemeneti adat közül a megcímzett bemeneti adatot továbbítja a kimenetére.
Laborgyakorlat Logikai áramkörök számítógéppel segített tervezése (CAD) Multiplexer (MPX) A multiplexer egy olyan áramkör, amely több bemeneti adat közül a megcímzett bemeneti adatot továbbítja a kimenetére.
5. Hét Sorrendi hálózatok
 5. Hét Sorrendi hálózatok Digitális technika 2015/2016 Bevezető példák Példa 1: Italautomata Legyen az általunk vizsgált rendszer egy italautomata, amelyről az alábbi dolgokat tudjuk: 150 Ft egy üdítő
5. Hét Sorrendi hálózatok Digitális technika 2015/2016 Bevezető példák Példa 1: Italautomata Legyen az általunk vizsgált rendszer egy italautomata, amelyről az alábbi dolgokat tudjuk: 150 Ft egy üdítő
Hálózati réteg. WSN topológia. Útvonalválasztás.
 Hálózati réteg WSN topológia. Útvonalválasztás. Tartalom Hálózati réteg WSN topológia Útvonalválasztás 2015. tavasz Szenzorhálózatok és alkalmazásaik (VITMMA09) - Okos város villamosmérnöki MSc mellékspecializáció,
Hálózati réteg WSN topológia. Útvonalválasztás. Tartalom Hálózati réteg WSN topológia Útvonalválasztás 2015. tavasz Szenzorhálózatok és alkalmazásaik (VITMMA09) - Okos város villamosmérnöki MSc mellékspecializáció,
Intelligens biztonsági megoldások. Távfelügyelet
 Intelligens biztonsági megoldások A riasztást fogadó távfelügyeleti központok felelősek a felügyelt helyszínekről érkező információ hatékony feldolgozásáért, és a bejövő eseményekhez tartozó azonnali intézkedésekért.
Intelligens biztonsági megoldások A riasztást fogadó távfelügyeleti központok felelősek a felügyelt helyszínekről érkező információ hatékony feldolgozásáért, és a bejövő eseményekhez tartozó azonnali intézkedésekért.
Programozási segédlet DS89C450 Fejlesztőpanelhez
 Programozási segédlet DS89C450 Fejlesztőpanelhez Készítette: Fekete Dávid Processzor felépítése 2 Perifériák csatlakozása a processzorhoz A perifériák adatlapjai megtalálhatók a programozasi_segedlet.zip-ben.
Programozási segédlet DS89C450 Fejlesztőpanelhez Készítette: Fekete Dávid Processzor felépítése 2 Perifériák csatlakozása a processzorhoz A perifériák adatlapjai megtalálhatók a programozasi_segedlet.zip-ben.
I+K technológiák. Beágyazott rendszerek 3. előadás Dr. Aradi Szilárd
 I+K technológiák Beágyazott rendszerek 3. előadás Dr. Aradi Szilárd LIN (Local Interconnect Network) kommunikációs hálózat 1980-as években jelentek meg az UART alapú soros megoldások a gépjárművekben,
I+K technológiák Beágyazott rendszerek 3. előadás Dr. Aradi Szilárd LIN (Local Interconnect Network) kommunikációs hálózat 1980-as években jelentek meg az UART alapú soros megoldások a gépjárművekben,
Dr. Oniga István DIGITÁLIS TECHNIKA 8
 Dr. Oniga István DIGITÁLIS TECHNIA 8 Szekvenciális (sorrendi) hálózatok Szekvenciális hálózatok fogalma Tárolók RS tárolók tárolók T és D típusú tárolók Számlálók Szinkron számlálók Aszinkron számlálók
Dr. Oniga István DIGITÁLIS TECHNIA 8 Szekvenciális (sorrendi) hálózatok Szekvenciális hálózatok fogalma Tárolók RS tárolók tárolók T és D típusú tárolók Számlálók Szinkron számlálók Aszinkron számlálók
TANMENET 2018/2019. tanév
 Szolnoki Műszaki Szakképzési Centrum Pálfy-Vízügyi Szakgimnáziuma 5000 Szolnok, Tiszaparti sétány 2-3. Tel:06-56-424-955, Fax: 06-56-513-925 e-mail cím: titkarsag@palfy-vizugyi.hu TANMENET 2018/2019. tanév
Szolnoki Műszaki Szakképzési Centrum Pálfy-Vízügyi Szakgimnáziuma 5000 Szolnok, Tiszaparti sétány 2-3. Tel:06-56-424-955, Fax: 06-56-513-925 e-mail cím: titkarsag@palfy-vizugyi.hu TANMENET 2018/2019. tanév
Véges állapotú gépek (FSM) tervezése
 tervezése") Véges állapotú gépek (FSM) tervezése F1. A 2. gyakorlaton foglalkoztunk a 3-mal vagy 5-tel osztható 4 bites számok felismerésével. Abban a feladatban a bemenet bitpárhuzamosan, azaz egy időben minden adatbit
Véges állapotú gépek (FSM) tervezése F1. A 2. gyakorlaton foglalkoztunk a 3-mal vagy 5-tel osztható 4 bites számok felismerésével. Abban a feladatban a bemenet bitpárhuzamosan, azaz egy időben minden adatbit
Autóipari beágyazott rendszerek. Integrált és szétcsatolt rendszerek
 Autóipari beágyazott rendszerek Integrált és szétcsatolt rendszerek 1 Integrált és szétcsatolt rendszerek Szétcsatolt rendszer 1:1 hozzárendelés ECUk és funkciók között Minden funkció külön egységen van
Autóipari beágyazott rendszerek Integrált és szétcsatolt rendszerek 1 Integrált és szétcsatolt rendszerek Szétcsatolt rendszer 1:1 hozzárendelés ECUk és funkciók között Minden funkció külön egységen van
Párhuzamos programozási platformok
 Párhuzamos programozási platformok Parallel számítógép részei Hardver Több processzor Több memória Kapcsolatot biztosító hálózat Rendszer szoftver Párhuzamos operációs rendszer Konkurenciát biztosító programozási
Párhuzamos programozási platformok Parallel számítógép részei Hardver Több processzor Több memória Kapcsolatot biztosító hálózat Rendszer szoftver Párhuzamos operációs rendszer Konkurenciát biztosító programozási
IoT alapú mezőgazdasági adatgyűjtő prototípus fejlesztési tapasztalatok
 IoT alapú mezőgazdasági adatgyűjtő prototípus fejlesztési tapasztalatok 2016.05.19. Szilágyi Róbert Tóth Mihály Debreceni Egyetem Az IoT Eszközök és más fizikai objektumok elektronikával, vezérléssel,
IoT alapú mezőgazdasági adatgyűjtő prototípus fejlesztési tapasztalatok 2016.05.19. Szilágyi Róbert Tóth Mihály Debreceni Egyetem Az IoT Eszközök és más fizikai objektumok elektronikával, vezérléssel,
Irányítástechnikai alapok. Zalotay Péter főiskolai docens KKMF
 Irányítástechnikai alapok Zalotay Péter főiskolai docens KKMF Az irányítás feladatai és fajtái: Alapfogalmak Irányítás: Műszaki berendezések ( gépek, gyártó sorok, szállító eszközök, vegyi-, hő-technikai
Irányítástechnikai alapok Zalotay Péter főiskolai docens KKMF Az irányítás feladatai és fajtái: Alapfogalmak Irányítás: Műszaki berendezések ( gépek, gyártó sorok, szállító eszközök, vegyi-, hő-technikai
Élettartam teszteknél alkalmazott programstruktúra egy váltóvezérlő példáján keresztül
 Élettartam teszteknél alkalmazott programstruktúra egy váltóvezérlő példáján keresztül 1 Tartalom Miről is lesz szó? Bosch GS-TC Automata sebességváltó TCU (Transmission Control Unit) Élettartam tesztek
Élettartam teszteknél alkalmazott programstruktúra egy váltóvezérlő példáján keresztül 1 Tartalom Miről is lesz szó? Bosch GS-TC Automata sebességváltó TCU (Transmission Control Unit) Élettartam tesztek
Az operációs rendszer szerkezete, szolgáltatásai
 Az operációs rendszer szerkezete, szolgáltatásai Felhasználói programok Rendszerhívások Válaszok Kernel Eszközkezelők Megszakításvezérlés Perifériák Az operációs rendszer szerkezete, szolgáltatásai Felhasználói
Az operációs rendszer szerkezete, szolgáltatásai Felhasználói programok Rendszerhívások Válaszok Kernel Eszközkezelők Megszakításvezérlés Perifériák Az operációs rendszer szerkezete, szolgáltatásai Felhasználói
Yottacontrol I/O modulok beállítási segédlet
 Yottacontrol I/O modulok beállítási segédlet : +36 1 236 0427 +36 1 236 0428 Fax: +36 1 236 0430 www.dialcomp.hu dial@dialcomp.hu 1131 Budapest, Kámfor u.31. 1558 Budapest, Pf. 7 Tartalomjegyzék Bevezető...
Yottacontrol I/O modulok beállítási segédlet : +36 1 236 0427 +36 1 236 0428 Fax: +36 1 236 0430 www.dialcomp.hu dial@dialcomp.hu 1131 Budapest, Kámfor u.31. 1558 Budapest, Pf. 7 Tartalomjegyzék Bevezető...
Vezetéknélküli technológia
 Vezetéknélküli technológia WiFi (Wireless Fidelity) 802.11 szabványt IEEE definiálta protokollként, 1997 Az ISO/OSI modell 1-2 rétege A sebesség függ: helyszíni viszonyok, zavarok, a titkosítás ki/be kapcsolása
Vezetéknélküli technológia WiFi (Wireless Fidelity) 802.11 szabványt IEEE definiálta protokollként, 1997 Az ISO/OSI modell 1-2 rétege A sebesség függ: helyszíni viszonyok, zavarok, a titkosítás ki/be kapcsolása
FPGA áramkörök alkalmazásainak vizsgálata
 FPGA áramkörök alkalmazásainak vizsgálata Kutatási beszámoló a Pro Progressio alapítvány számára Raikovich Tamás, 2012. 1 Bevezetés A programozható logikai áramkörökön (FPGA) alapuló hardver gyorsítók
FPGA áramkörök alkalmazásainak vizsgálata Kutatási beszámoló a Pro Progressio alapítvány számára Raikovich Tamás, 2012. 1 Bevezetés A programozható logikai áramkörökön (FPGA) alapuló hardver gyorsítók
Hálózati architektúrák laborgyakorlat
 Hálózati architektúrák laborgyakorlat 4. hét Dr. Orosz Péter, Skopkó Tamás 2012. szeptember Hálózati réteg (L3) Kettős címrendszer Interfész konfigurációja IP címzés: címosztályok, alhálózatok, szuperhálózatok,
Hálózati architektúrák laborgyakorlat 4. hét Dr. Orosz Péter, Skopkó Tamás 2012. szeptember Hálózati réteg (L3) Kettős címrendszer Interfész konfigurációja IP címzés: címosztályok, alhálózatok, szuperhálózatok,
Hálózati alapismeretek
 Hálózati alapismeretek Tartalom Hálózat fogalma Előnyei Csoportosítási lehetőségek, topológiák Hálózati eszközök: kártya; switch; router; AP; modem Az Internet története, legfontosabb jellemzői Internet
Hálózati alapismeretek Tartalom Hálózat fogalma Előnyei Csoportosítási lehetőségek, topológiák Hálózati eszközök: kártya; switch; router; AP; modem Az Internet története, legfontosabb jellemzői Internet
A MAC-cím (Media Access Control) egy hexadecimális számsorozat, amellyel még a gyártás során látják el a hálózati kártyákat. A hálózat többi eszköze
 egy hexadecimális számsorozat, amellyel még a gyártás során látják el a hálózati kártyákat. A hálózat többi eszköze") A MAC-cím (Media Access Control) egy hexadecimális számsorozat, amellyel még a gyártás során látják el a hálózati kártyákat. A hálózat többi eszköze a MAC-címet használja a hálózat előre meghatározott
A MAC-cím (Media Access Control) egy hexadecimális számsorozat, amellyel még a gyártás során látják el a hálózati kártyákat. A hálózat többi eszköze a MAC-címet használja a hálózat előre meghatározott
Digitális rendszerek. Digitális logika szintje
 Digitális rendszerek Digitális logika szintje CPU lapkák Mai modern CPU-k egy lapkán helyezkednek el Kapcsolat a külvilággal: kivezetéseken (lábak) keresztül Cím, adat és vezérlőjelek, ill. sínek (buszok)
Digitális rendszerek Digitális logika szintje CPU lapkák Mai modern CPU-k egy lapkán helyezkednek el Kapcsolat a külvilággal: kivezetéseken (lábak) keresztül Cím, adat és vezérlőjelek, ill. sínek (buszok)
Tájékoztató. Értékelés. 100% = 100 pont A VIZSGAFELADAT MEGOLDÁSÁRA JAVASOLT %-OS EREDMÉNY: EBBEN A VIZSGARÉSZBEN A VIZSGAFELADAT ARÁNYA 40%.
 A 10/2007 (II. 27.) SzMM rendelettel módosított 1/2006 (II. 17.) OM rendelet Országos Képzési Jegyzékről és az Országos Képzési Jegyzékbe történő felvétel és törlés eljárási rendjéről alapján. Szakképesítés,
A 10/2007 (II. 27.) SzMM rendelettel módosított 1/2006 (II. 17.) OM rendelet Országos Képzési Jegyzékről és az Országos Képzési Jegyzékbe történő felvétel és törlés eljárási rendjéről alapján. Szakképesítés,
The Flooding Time Synchronization Protocol
 The Flooding Time Synchronization Protocol Célok: FTSP Alacsony sávszélesség overhead Node és kapcsolati hibák kiküszöbölése Periodikus flooding (sync message) Implicit dinamikus topológia frissítés MAC-layer
The Flooding Time Synchronization Protocol Célok: FTSP Alacsony sávszélesség overhead Node és kapcsolati hibák kiküszöbölése Periodikus flooding (sync message) Implicit dinamikus topológia frissítés MAC-layer
Rendszermodellezés. Modellellenőrzés. Budapesti Műszaki és Gazdaságtudományi Egyetem Méréstechnika és Információs Rendszerek Tanszék
 Rendszermodellezés Modellellenőrzés Budapesti Műszaki és Gazdaságtudományi Egyetem Méréstechnika és Információs Rendszerek Tanszék Ismétlés: Mire használunk modelleket? Kommunikáció, dokumentáció Gondolkodás,
Rendszermodellezés Modellellenőrzés Budapesti Műszaki és Gazdaságtudományi Egyetem Méréstechnika és Információs Rendszerek Tanszék Ismétlés: Mire használunk modelleket? Kommunikáció, dokumentáció Gondolkodás,
A tervfeladat sorszáma: 1 A tervfeladat címe: ALU egység 8 regiszterrel és 8 utasítással
 .. A tervfeladat sorszáma: 1 A ALU egység 8 regiszterrel és 8 utasítással Minimálisan az alábbi képességekkel rendelkezzen az ALU 8-bites operandusok Aritmetikai funkciók: összeadás, kivonás, shift, komparálás
.. A tervfeladat sorszáma: 1 A ALU egység 8 regiszterrel és 8 utasítással Minimálisan az alábbi képességekkel rendelkezzen az ALU 8-bites operandusok Aritmetikai funkciók: összeadás, kivonás, shift, komparálás
Járműfedélzeti rendszerek II. 8. előadás Dr. Bécsi Tamás
 Járműfedélzeti rendszerek II. 8. előadás Dr. Bécsi Tamás A FlexRay hálózat Kifejlesztésének célja: alacsony költségen, nagy megbízhatóságú, nagy teljesítményű adatátvitel járműipari környezetben. A specifikációt
Járműfedélzeti rendszerek II. 8. előadás Dr. Bécsi Tamás A FlexRay hálózat Kifejlesztésének célja: alacsony költségen, nagy megbízhatóságú, nagy teljesítményű adatátvitel járműipari környezetben. A specifikációt
DIGITÁLIS TECHNIKA 8 Dr Oniga. I stván István
 Dr. Oniga István DIGITÁLIS TECHNIA 8 Szekvenciális (sorrendi) hálózatok Szekvenciális hálózatok fogalma Tárolók RS tárolók tárolók T és D típusú tárolók Számlálók Szinkron számlálók Aszinkron számlálók
Dr. Oniga István DIGITÁLIS TECHNIA 8 Szekvenciális (sorrendi) hálózatok Szekvenciális hálózatok fogalma Tárolók RS tárolók tárolók T és D típusú tárolók Számlálók Szinkron számlálók Aszinkron számlálók
OSI-ISO modell. Az OSI rétegek feladatai: Adatkapcsolati réteg (data link layer) Hálózati réteg (network layer)
 Hálózati réteg (network layer)") OSI-ISO modell Több világcég megalkotta a saját elképzelései alapján a saját hálózati architektúráját, de az eltérések miatt egységesíteni kellett, amit csak nemzetközi szinten lehetett megoldani. Ez a
OSI-ISO modell Több világcég megalkotta a saját elképzelései alapján a saját hálózati architektúráját, de az eltérések miatt egységesíteni kellett, amit csak nemzetközi szinten lehetett megoldani. Ez a
A gyártási rendszerek áttekintése
 SZÉCHENYI ISTVÁN EGYETEM GYŐR Gyártócellák (NGB_AJ018_1) A gyártási rendszerek áttekintése Bevezetés A tantárgy célja A gyártócellák c. tárgy átfogóan foglalkozik a gyártás automatizálás eszközeivel, ezen
SZÉCHENYI ISTVÁN EGYETEM GYŐR Gyártócellák (NGB_AJ018_1) A gyártási rendszerek áttekintése Bevezetés A tantárgy célja A gyártócellák c. tárgy átfogóan foglalkozik a gyártás automatizálás eszközeivel, ezen
Nyíregyházi Egyetem Matematika és Informatika Intézete. Input/Output
 1 Input/Output 1. I/O műveletek hardveres háttere 2. I/O műveletek szoftveres háttere 3. Diszkek (lemezek) ------------------------------------------------ 4. Órák, Szöveges terminálok 5. GUI - Graphical
1 Input/Output 1. I/O műveletek hardveres háttere 2. I/O műveletek szoftveres háttere 3. Diszkek (lemezek) ------------------------------------------------ 4. Órák, Szöveges terminálok 5. GUI - Graphical
I. C8051Fxxx mikrovezérlők hardverfelépítése, működése. II. C8051Fxxx mikrovezérlők programozása. III. Digitális perifériák
 I. C8051Fxxx mikrovezérlők hardverfelépítése, működése 1. Adja meg a belső RAM felépítését! 2. Miben különbözik a belső RAM alsó és felső felének elérhetősége? 3. Hogyan érhetők el az SFR regiszterek?
I. C8051Fxxx mikrovezérlők hardverfelépítése, működése 1. Adja meg a belső RAM felépítését! 2. Miben különbözik a belső RAM alsó és felső felének elérhetősége? 3. Hogyan érhetők el az SFR regiszterek?
5.1. fejezet - Általános 32 bites mikrovezérlő/processzor alkalmazástechnikája A Freescale
 5.1. fejezet - Általános 32 bites mikrovezérlő/processzor alkalmazástechnikája Jelenleg a piacon több általános jellegű processzor-architektúra van a beágyazott eszköz piacon, ezek közül a legismertebbek:
5.1. fejezet - Általános 32 bites mikrovezérlő/processzor alkalmazástechnikája Jelenleg a piacon több általános jellegű processzor-architektúra van a beágyazott eszköz piacon, ezek közül a legismertebbek:
Analóg-digitális átalakítás. Rencz Márta/ Ress S. Elektronikus Eszközök Tanszék
 Analóg-digitális átalakítás Rencz Márta/ Ress S. Elektronikus Eszközök Tanszék Mai témák Mintavételezés A/D átalakítók típusok D/A átalakítás 12/10/2007 2/17 A/D ill. D/A átalakítók A világ analóg, a jelfeldolgozás
Analóg-digitális átalakítás Rencz Márta/ Ress S. Elektronikus Eszközök Tanszék Mai témák Mintavételezés A/D átalakítók típusok D/A átalakítás 12/10/2007 2/17 A/D ill. D/A átalakítók A világ analóg, a jelfeldolgozás
IDAXA-PiroSTOP. PIRINT PiroFlex Interfész. Terméklap
 IDAXA-PiroSTOP PIRINT PiroFlex Interfész Terméklap Hexium Kft. PIRINT Terméklap Rev 2 2 Tartalomjegyzék. ISMERTETŐ... 3 2. HARDVER... 4 2. LED... 5 2.2 KAPCSOLAT A VKGY GYŰRŰVEL... 6 2.3 CÍMBEÁLLÍTÁS...
IDAXA-PiroSTOP PIRINT PiroFlex Interfész Terméklap Hexium Kft. PIRINT Terméklap Rev 2 2 Tartalomjegyzék. ISMERTETŐ... 3 2. HARDVER... 4 2. LED... 5 2.2 KAPCSOLAT A VKGY GYŰRŰVEL... 6 2.3 CÍMBEÁLLÍTÁS...
Járműinformatika bevezetés. 1. Óra
 Járműinformatika bevezetés 1. Óra Ajánlott irodalom Gépjárművek buszhálózatai Dr. Kováts Miklós, Dr. Szalay Zsolt (ISBN 978-963-9945-10-4) Multiplexed Networks for Embedded Systems Dominique Paret (ISBN
Járműinformatika bevezetés 1. Óra Ajánlott irodalom Gépjárművek buszhálózatai Dr. Kováts Miklós, Dr. Szalay Zsolt (ISBN 978-963-9945-10-4) Multiplexed Networks for Embedded Systems Dominique Paret (ISBN
Informatika érettségi vizsga
 Informatika 11/L/BJ Informatika érettségi vizsga ÍRÁSBELI GYAKORLATI VIZSGA (180 PERC - 120 PONT) SZÓBELI SZÓBELI VIZSGA (30 PERC FELKÉSZÜLÉS 10 PERC FELELET - 30 PONT) Szövegszerkesztés (40 pont) Prezentáció-készítés
Informatika 11/L/BJ Informatika érettségi vizsga ÍRÁSBELI GYAKORLATI VIZSGA (180 PERC - 120 PONT) SZÓBELI SZÓBELI VIZSGA (30 PERC FELKÉSZÜLÉS 10 PERC FELELET - 30 PONT) Szövegszerkesztés (40 pont) Prezentáció-készítés
A DNS64 és NAT64 IPv6 áttérési technikák egyes implementációinak teljesítőképesség- és stabilitás-vizsgálata. Répás Sándor
 A DNS64 és NAT64 IPv6 áttérési technikák egyes implementációinak teljesítőképesség- és stabilitás-vizsgálata Répás Sándor Lépni Kell! Elfogytak a kiosztható IPv4-es címek. Az IPv6 1998 óta létezik. Alig
A DNS64 és NAT64 IPv6 áttérési technikák egyes implementációinak teljesítőképesség- és stabilitás-vizsgálata Répás Sándor Lépni Kell! Elfogytak a kiosztható IPv4-es címek. Az IPv6 1998 óta létezik. Alig
13. KOMMUNIKÁCIÓS HÁLÓZATOK
 13. KOMMUNIKÁCIÓS HÁLÓZATOK A mai digitális berendezések egy jelentős része más berendezések közötti adatátvitelt végez. Esetenként az átvitel megoldható minimális hardverrel, míg máskor összetett hardver-szoftver
13. KOMMUNIKÁCIÓS HÁLÓZATOK A mai digitális berendezések egy jelentős része más berendezések közötti adatátvitelt végez. Esetenként az átvitel megoldható minimális hardverrel, míg máskor összetett hardver-szoftver
8.3. AZ ASIC TESZTELÉSE
 8.3. AZ ASIC ELÉSE Az eddigiekben a terv helyességének vizsgálatára szimulációkat javasoltunk. A VLSI eszközök (közöttük az ASIC) tesztelése egy sokrétűbb feladat. Az ASIC modellezése és a terv vizsgálata
8.3. AZ ASIC ELÉSE Az eddigiekben a terv helyességének vizsgálatára szimulációkat javasoltunk. A VLSI eszközök (közöttük az ASIC) tesztelése egy sokrétűbb feladat. Az ASIC modellezése és a terv vizsgálata
Párhuzamos programozási platformok
 Párhuzamos programozási platformok Parallel számítógép részei Hardver Több processzor Több memória Kapcsolatot biztosító hálózat Rendszer szoftver Párhuzamos operációs rendszer Konkurenciát biztosító programozási
Párhuzamos programozási platformok Parallel számítógép részei Hardver Több processzor Több memória Kapcsolatot biztosító hálózat Rendszer szoftver Párhuzamos operációs rendszer Konkurenciát biztosító programozási
Billentyűzet. Csatlakozók: A billentyűzetet kétféle csatlakozóval szerelhetik. 5 pólusú DIN (AT vagy XT billentyűzet csatlakozó),
,") Billentyűzet Általános billentyűzet Csatlakozók: A billentyűzetet kétféle csatlakozóval szerelhetik. 5 pólusú DIN (AT vagy XT billentyűzet csatlakozó), 6 pólusú mini-din (PS/2 billentyűzet csatlakozó).
Billentyűzet Általános billentyűzet Csatlakozók: A billentyűzetet kétféle csatlakozóval szerelhetik. 5 pólusú DIN (AT vagy XT billentyűzet csatlakozó), 6 pólusú mini-din (PS/2 billentyűzet csatlakozó).