RobonAUT Versenyleírás és szabályzat V 1.2. (2010. január 6)
|
|
|
- Mária Veresné
- 8 évvel ezelőtt
- Látták:
Átírás
1 RobonAUT 2010 Versenyleírás és szabályzat V 1.2 (2010. január 6)

2 A verseny célja A 2009/2010-es tanév ıszi félévében elıször kerül megrendezésre a RobonAUT robotverseny a BME Automatizálási és Alkalmazott Informatikai Tanszékének (AAIT) gondozásában. Célunk, hogy hallgatóinknak órarenden kívüli lehetıséget biztosítsunk arra, hogy az elméletben tanultakat a gyakorlatba átültetve kipróbálják magukat eljövendı szakmájukban, összemérjék tudásukat és elszántságukat, és ráadásul mindeközben jól szórakozzanak. A RobonAUT versenyben önállóan mőködı (autonóm) robotjármővek és készítıik vesznek részt. A robot feladata, hogy emberi beavatkozás nélkül, minél rövidebb idı alatt végigjusson egy akadálypályán, a lehetı legtöbb részfeladatot teljesítve útja során. A RobonAUT tulajdonképpen egy egész szemeszteren végighúzódó hallgatói projekt. A félév során a résztvevık folyamatos munkájára van szükség ahhoz, hogy a vizsgaidıszakban megrendezett versenyen sikert érjenek el. Az lesz a gyıztes, aki a legkifinomultabban mőködı, gyors és pontos irányítással szereli fel robotját, és így a legtöbb pontot szerzi a mindent eldöntı futamokon. A legjobbak eredményét erkölcsi siker és a tanulmányi teljesítménybe való beszámítás is honorálja. A kiemelkedı teljesítmények TDK dolgozatként vagy publikációként is benyújthatók. Résztvevık A robotverseny az AAIT által oktatott Robotirányítás rendszertechnikája címő tantárgyhoz kapcsolódik a legszorosabban, amely a villamosmérnöki MSc képzés Számítógép-alapú rendszerek szakirányának egyik tantárgya. A résztvevık elsısorban a tantárgy hallgatói közül kerülnek ki. A versenyre csapatok nevezhetnek az ıszi félévben induló tantárgy elsı oktatási hetében. Csapatonként egy robotot kell készíteni. A csapatok létszáma 2 vagy 3 fı lehet. Eszközök A versenyt gondozó tanszék eszköz- és anyagi támogatást nyújt a résztvevı csapatoknak. Ez magában foglalja a legfontosabb részegységek, építıelemek beszerzését, a tanszéki laborok használatának lehetıségét, valamint adott mértékig a felmerülı gyártási és alkatrészköltségeket. A tanszék által biztosított eszközök: 1 db lánctalpas rakodó modell. Rádió-távirányítású, billenthetı kanalas rakodó modell, amely megfelelı átalakítások után a robot mechanikai platformjaként szolgál. 1 db processzorkártya. Az ST Microelectronics által gyártott STM32 comstick fejlesztıkártya, amely egy ARM Cortex-M3 processzormaggal rendelkezı mikrokontrollert és számos bıvítési lehetıséget tartalmaz. A csomag része egy integrált fejlesztıkörnyezet, C fordítóval és a mikrokontroller perifériáinak kezelésére szolgáló függvénykönyvtárral. 2

3 1 db bıvítıkártya. A processzorkártya nagy lábsőrőségő bıvítı csatlakozóját hagyományos szalagkábel-csatlakozóvá alakító adapterkártya, amely egy 5V-os tápegységet is tartalmaz Ft szabadon felhasználható költségkeret. A tanszék a fenti egységeken túlmenıen felmerülı nyomtatott áramkör gyártási és alkatrész beszerzési költségeket számla ellenében az említett értékhatárig megtéríti. Az akadálypálya A verseny során a résztvevı robotjármőveknek egy akadálypályán kell végighaladniuk, és ennek mentén különbözı feladatokat kell teljesíteniük. Az akadálypálya vízszintes, sík felületen lesz kialakítva. A tájékozódást a következık segítik: A robot középvonala által követendı útvonalat fekete vezetıvonal jelöli ki. A tájékozódáshoz bizonyos helyeken falak szolgáltatnak kiegészítı információt. A pálya ezek figyelembe vétele nélkül is teljesíthetı, de a falak felismerése komoly elınyt jelent, bizonyos (opcionális) feladatok csak ezek felismerése után teljesíthetık. A pálya szakaszokra van osztva, a szakaszokat ellenırzı pontok határolják. Az ellenırzıpontokat a vezetıvonalra merıleges, attól eltérı (fehér) színő vonalak jelzik. Egy ellenırzı pont akkor tekinthetı teljesítettnek, ha a robot teljes terjedelmével áthaladt fölötte. Az utolsó ellenırzı pont maga a célvonal. A minimális teljesítendı feladat az, hogy a versenyben résztvevı robot a vezetıvonalon végighaladva eljusson a célba. A pályán extra feladat is teljesíthetı, ami számottevı elınyhöz juttathatja a versenyzı robot csapatát. Az extra feladat ping-pong labdák begyőjtésébıl és egy tárolóba való eljuttatásából áll. A verseny a minimális feladat végrehajtása esetén tekinthetı teljesítettnek. Külsı beavatkozások A verseny alapvetı célja, hogy a robotok autonóm mőködésőek legyenek, vagyis emberi beavatkozás nélkül hajtsák végre a feladatokat. A robotoknak magukban kell foglalniuk a teljes irányítórendszerüket és tápellátásukat. Játék közben a robot és a külvilág között semmilyen kommunikáció vagy távvezérlés nem megengedett. Kivételes esetben lehetıség van korlátozott számú külsı (kézi) beavatkozásra. Abban az esetben, ha a robot letért a vezetıvonalról, és a csapat úgy ítéli meg, hogy eltévedt, az egyik (verseny elején kijelölt) csapattag visszahelyezheti a vonalra, a következı feltételekkel: A kijelölt csapattagnak beavatkozási szándékát egyértelmően tudatnia kell a versenybíróval (kézjelzéssel, szóval) Minden beavatkozás pontlevonással jár Maximum 5 beavatkozás lehetséges, ennél több beavatkozás érvényteleníti a futamot Robotot visszahelyezni kizárólag már teljesített ellenırzı pontra lehet. Visszahelyezéskor a robot lánctalpának érintkeznie kell az adott ellenırzı ponttal. 3

4 Pályaelemek Az akadálypálya elıre definiált elemekbıl épül fel. Az egyes pályaelemek száma rögzített, azonban a pálya pontos felépítése, az elemek sorrendje a verseny napja elıtt nem ismert. A következı pályaelemek fordulhatnak elı: A pályaelemeket összekötı egyszerő vezetıvonal Start (1 db) Alagút (1 db) Elágazás és becsatlakozás (1-1 db) Extra útelágazás (2 db) Begyőjtıhely (1 db) Lerakóhely (1 db) Cél (1 db) A következıkben bemutatjuk az egyes pályaelemeket és azok legfontosabb tulajdonságait. A pályaelemek pontos méretekkel ellátott rajzai a függelékben találhatók. Egyszerő vezetıvonal A vezetıvonal fekete színő, 19 mm szélességő szigetelıszalagból készül. Egyenes és íves szakaszokból áll, a szakaszok között törések is lehetnek. Az íves szakaszok görbületi sugara nem lehet kisebb 25 cm-nél, a szakaszok közötti törés szöge az egyeneshez képest nem lehet nagyobb, mint 35 fok. Falak csak speciális pályaelemek részei lehetnek, az egyszerő vezetıvonal közelében (50 cm-nél közelebb) nem lehet sem fal, sem egyéb objektum. Start A vezetıvonal T-formával kezdıdik (ld. 1. ábra). A startmezı a vonal kezdetétıl az elsı ellenırzı pontig (a startvonalig) tart. Indulás elıtt a robotot úgy kell elhelyezni, hogy teljes terjedelmével ebben a mezıben legyen az egyenes vezetıvonal fölött (a vezetıvonalra merıleges segédvonalak felülrıl nézve a robot elıtt és mögött teljes terjedelmükben láthatók kell legyenek). Ha a robot teljes terjedelmével elhagyta a startmezıt, az már pontot ér (sikeres elindulás). 4

5 Alagút 1. ábra Start Alagútnak nevezzük azt a pályaelemet, ahol a vezetıvonal szaggatottá válik, és a vonalat mindkét oldalról fal kíséri (2. ábra). A falak párhuzamosan futnak a vonal mellett, mindkét oldalon azonos távolságban. Az alagút nem kanyarodik, végig egyenesen halad. Az alagút pontos hossza elıre nem ismert, csak a lehetséges hossz minimuma és maximuma. Az alagút által jelentett nehezebb szakasz teljesítését segíti, hogy az alagút elıtt és után adott hosszon garantáltan egyenes a vezetıvonal. Az alagút pályaelem teljesítését a robotra felszerelt oldalsó távolságérzékelı szenzorok segíthetik, egyenes jellege miatt azonban ez a feladat némi szerencsével ezen szenzorok hiánya vagy hibás távolságérzékelése esetén is teljesíthetı. 2. ábra Alagút 5

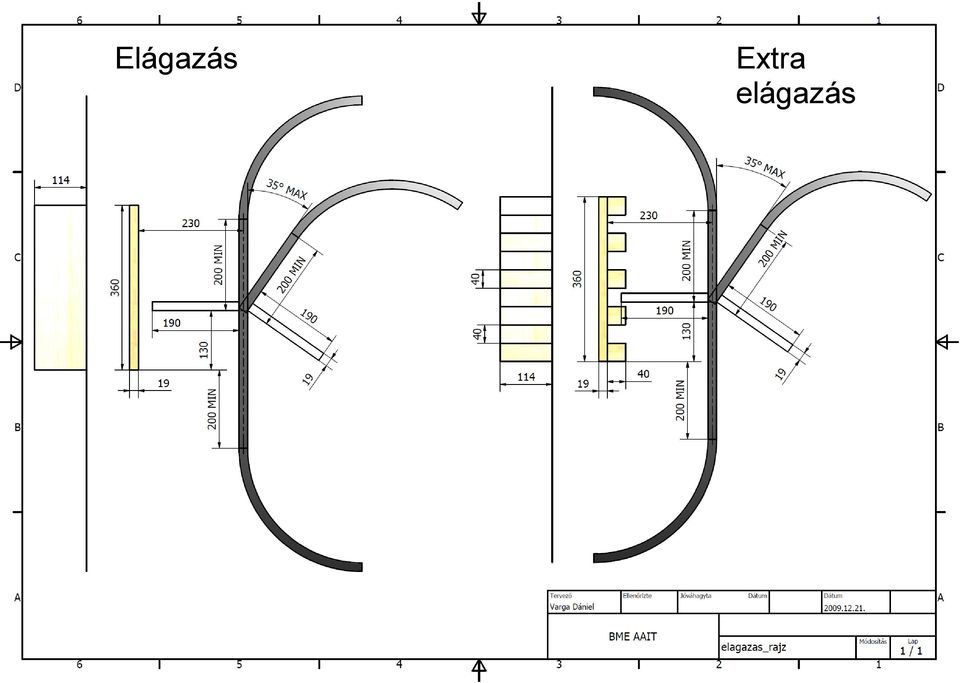
6 Elágazás A vezetıvonal elágazását jelenti. Innentıl kezdve két irány lehetséges, egyenesen tovább, vagy oldalra leágazva. Nincs kitüntetett oldal, vagyis jobb, ill. bal oldali leágazás is lehetséges. Az egyenesen továbbhaladó irány kerülıútra visz, amely tetemes idıveszteséget jelenthet, míg a leágazó irány a pálya rövidítésére ad lehetıséget. A döntés megkönnyítése érdekében a leágazó iránnyal szemközti oldalon egy az egyenes pályaszakasszal párhuzamos fal található. A fal érzékelése esetén biztosan kiválasztható a rövidebb út (3. ábra). Az ábrán látható, hogy az elágazási pontban mindenképpen elhelyezkedik egy ellenırzı pont. Ezen a helyen az ellenırzı pontot egy megtört fehér vonal jelzi, vagyis a robot esetleges késıbbi eltévedése esetén az elágazás bármely ágára visszahelyezhetı (külsı beavatkozás, tehát pontlevonás ellenében). 3. ábra Elágazás Becsatlakozás Az elágazás párja, itt csatlakozik be a kerülıút az eredeti útvonalba. Az összetalálkozó vonalak által bezárt szög maximuma ugyanakkora, mint az elágazásnál. Gyakorlatilag egy fordított irányból megközelített elágazásnak tekinthetı, ahol nem található fal. 6

7 4. ábra Becsatlakozás Extra elágazás Hasonló az elágazáshoz, azzal a különbséggel, hogy ennél a pályaelemnél egy bordázott fal található az egyenes iránnyal párhuzamosan elhelyezve. Az egyenes irány a plusz pontokat jelentı begyőjtı- vagy lerakóhelyhez vezet, ami a vonalkövetés szempontjából zsákutca. A begyőjtı-, ill. lerakóhelytıl vissza kell találni ehhez az elágazáshoz, hogy tovább lehessen haladni a cél felé (tipikusan tolatással). A leágazó irány elkerüli a zsákutcát és továbbvezet viszont ebben az esetben a plusz pontok nem szerezhetık meg. 5. ábra Extra elágazás 7
.")
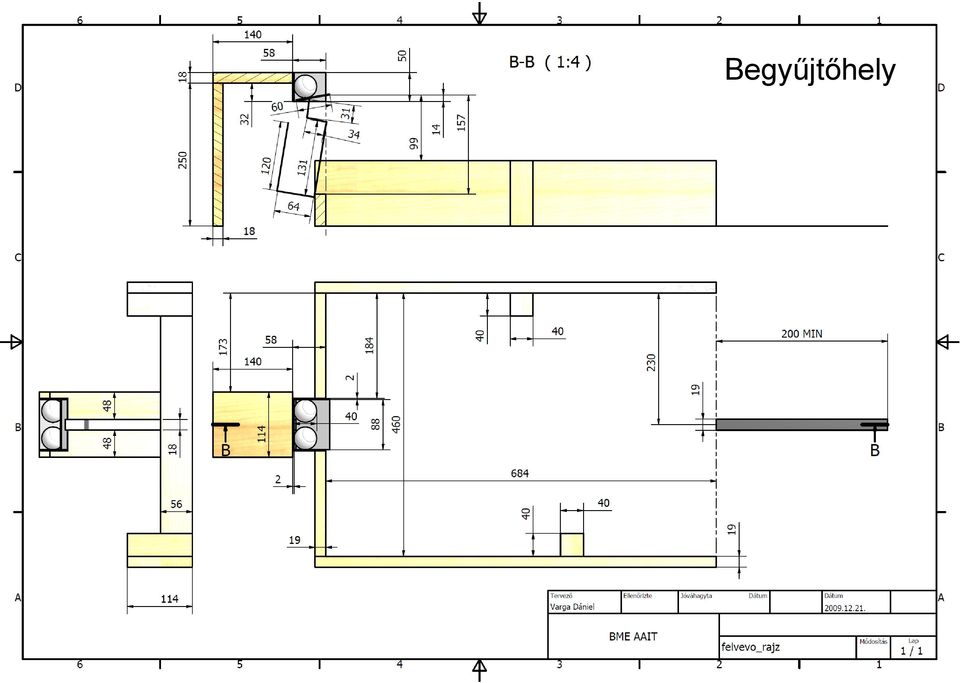
8 Begyőjtıhely Ezen a helyen van lehetıség a plusz pontokat jelentı ping-pong labdák begyőjtésére. A vezetıvonal itt véget ér, és egy speciális U-alakú falrendszer vezet tovább a labdaadagoló berendezéshez (6. ábra). A robotnak a vonalat ideiglenesen elhagyva, a falak mentén haladva kell eljutnia a labdákhoz. A hosszanti tájékozódást ( hol kell megállni ) két mozgatható marker segíti. Ezek a falon található és a fal mentén csúsztatható kiszögellések, amelyek pozícióját a versenyzı csapat egyik tagja a robot szenzorai elhelyezkedése ismeretében beállíthatja a futam elıtt. 6. ábra Begyőjtıhely A labdaadagoló berendezésben 2 db ping-pong labda található (7.a. ábra). Az adagoló az alján található, mélyen lelógó nyelv megnyomásával mőködtethetı. A nyelvet a robot felemelt kanalával megfelelıen megnyomva, a labdák a kanálba esnek. 7.a. ábra Labdaadagoló 8

9 A pályaelemek legyártása után a referenciaként szolgáló mintarobottal végzett tesztek alapján az adagolóból lelógó nyelv alakját módosítottuk a biztosabb labdaelérés érdekében. A módosított elrendezés képe a 7.b. ábrán látható, a Függelékben pedig már ennek a megvalósított verziónak a rajza szerepel. 7.b. ábra A megvalósított labdaadagoló A labdák begyőjtése után vissza kell találni a legutolsó elágazáshoz, mert csak így folytatható az eredeti útvonal. A begyőjtıhely teljes elhagyásakor csak a kanálban található labdák (0, 1 vagy 2 darab) számítanak begyőjtöttnek. A begyőjtıhelyhez vezetı extra elágazás garantáltan hamarabb helyezkedik el a pályán, mint a lerakóhelyhez vezetı. Lerakóhely A begyőjtıhely párja, itt kell elhelyezni a ping-pong labdákat. A vezetıvonal itt is véget ér, és egy speciális U-alakú falrendszer vezet tovább a lerakási területhez, a begyőjtıhelynél látottakhoz hasonlóan (8. ábra). A két mozgatható marker (a megállás segítésére) itt is megtalálható. A kanálban hozott labdákat a magasított fallal körülvett területre kell elhelyezni. Azokért a labdákért kapható lerakási pont, amelyek a célba érkezés idıpontjában is bent találhatók a fallal körülzárt területen. A labdák lerakása után vissza kell találni a legutolsó elágazáshoz, mert csak így folytatható az eredeti útvonal. A lerakóhelyhez vezetı extra elágazás garantáltan késıbb helyezkedik el a pályán, mint a begyőjtıhelyhez vezetı. 9

10 8. ábra Lerakóhely Cél A startnál látottakhoz hasonlóan, a vezetıvonal T-formában végzıdik (ld. 9. ábra). A célvonal az utolsó ellenırzı pont. Az idımérés akkor áll le, amikor a robot teljes terjedelmével áthaladt a célhoz tartozó ellenırzı ponton (fehér vonal). Az áthaladás után a robotnak meg kell állnia úgy, hogy a vezetıvonal végén található T-formát takarja, vagyis felülrıl ránézve az elágazási pont ne legyen látható. Ha a robot túlfut a lezáró ponton, az pontlevonással jár. 9. ábra Cél 10

11 A játék menete Elıkészület A futam indítása elıtt a versenyzı csapatnak 3 perce van a felkészülésre. Ez alatt kell a robotot a startmezıre helyezni, illetve ekkor lehet beállítani a begyőjtı- és lerakóhelyeknél lévı markerek helyzetét az oldalfalakon. Ilyenkor már nem lehet a roboton futó szoftvert módosítani, valamint külsı kapcsolóit, potenciométereit, stb. állítgatni. Különleges esetben (pl. RAM-ból futó program) lehetıség van a program feltöltésére, de azon ilyenkor már nem lehet változtatni. Indítás Futam o A robotokon egy olyan startberendezést kell elhelyezni, amely egy huzal (cérna, spárga, stb.) meghúzásával aktiválható. A huzalnak legalább 30 cm hosszúnak kell lennie és meghúzás után le kell válnia a robotról. o A robotot az a csapattag indítja, aki a továbbiakban is felügyeli a robotot. Ezentúl csak ı nyúlhat hozzá, amennyiben a robot visszahelyezésre kényszerül. A játékvezetı szóban adja meg a rajtjelet, és indítja az órát. A rajtjel elıtti indítás esetén a startot meg kell ismételni. A harmadik korai indítás után a futam érvénytelennek tekintendı. o Egy futam akkor érvényes, ha a robot sikeres indítás után minden ellenırzıponton teljes terjedelmével áthalad. o Amennyiben a robot eltéved, és külsı beavatkozás válik szükségessé, akkor ezt a fentebb kiválasztott csapattagnak egyértelmően jeleznie kell a vezetıbírónak, akinek engedélye után beléphet a piros csíkkal határolt pálya területére, és a robotot visszahelyezheti egy olyan ellenırzıpontra, amelyen a robot már teljes terjedelmével áthaladt. o A robot visszahelyezése során kizárólag annak fizikai mozgatása történhet, semmilyen kapcsoló, beavatkozó, stb. nem állítható ilyenkor, még a reset gomb megnyomása sem engedélyezett! o Amennyiben egy visszahelyezés megtörtént, akkor a csapattagnak a legrövidebb úton el kell hagynia a kijelölt pályát. Pályaelhagyás nélkül két visszahelyezés nem engedélyezett. o A futam során a pályát határoló piros csíkon belülre senki nem léphet be, kivéve a beavatkozás fenti esetét. Futam vége o Az óra akkor áll meg, ha a robot teljes terjedelmével áthaladt a célhoz tartozó utolsó ellenırzıponton. o A futam akkor is véget ér, ha a robot a maximális idıkereten belül nem ér célba, illetve a felügyelı csapattag ki nem jelenti, hogy a futamot befejezettnek tekinti. A maximális idıkeret 5 perc. 11
 lehetıség van a program feltöltésére, de azon ilyenkor már nem lehet változtatni.")
12 Pontozás Egy futam során jutalom- és büntetıpontok is szerezhetık. Az egyes események pontértéke a következı: Jutalompontok Elindulás (áthaladás az elsı ellenırzı ponton): 5 pont Célba érés (áthaladás az utolsó ellenırzı ponton): 45 pont Labda begyőjtése: 10 pont/labda Labda lerakása: 5 pont/labda Gyorsasági bónusz a 4 leggyorsabban célba érınek: 20, 15, 10, 5 pont Büntetıpontok Külsı beavatkozás: 5 pont A célban a robot nem áll meg: 5 pont A verseny 3 fordulós. Egy fordulóban minden csapatnak egy futama van. Ez azt jelenti, hogy amíg mindenki le nem játszott egy fordulót, addig a következı forduló nem kezdhetı el. Gyorsasági bónusz egy fordulón belül a legjobb 4 idıeredményért adható. A leggyorsabban célba érı robot 20 pontot kap, az utána következık mindig 5 ponttal kevesebbet. Így minden csapatnak minden forduló végére kialakul egy pontszáma. Minden csapatnál a számára legjobban sikerült forduló pontszámát tekintjük végeredménynek. A versenyben maximálisan 100 pont érhetı el. A verseny sikeres teljesítéséhez legalább 40 pont megszerzése szükséges (minimális pontszám). A minimális pontszámot teljesítı csapatok tagjai jogosultak a verseny teljesítéséért járó jutalmakra. 12

13 Jutalom A versenyt sikeresen teljesítı (min. 40 pontot elérı) csapatok tagjai jutalomban részesülnek. Minden ilyen résztvevı két lehetıség közül választhat (egy csapaton belül a csapattagok akár különbözı jutalmat is választhatnak). 1. lehetıség Mivel a verseny a Robotirányítás rendszertechnikája címő tantárgyhoz kapcsolódik, a versenyt teljesítı hallgatók a szerzett pontokat beszámíttathatják a tantárgy vizsgájába oly módon, hogy a megszerzett pontok felét hozzáadják a vizsga pontszámához. A vizsga pontozása a következı: 0-44 pont: pont: pont: pont: pont: 5 Látható, hogy legalább elégséges szintő vizsgapontszámnál 15 plusz pont eggyel jobb jegyet jelent. Mivel a sikeres verseny minimumpontszáma 40, ezért legalább plusz 20 pont hozható a vizsgapontszámba, vagyis egy jegyet mindenképpen javít, aki ezt választja. 2. lehetıség Aki sikeresen teljesíti a versenyt, de nem kéri a beszámítását a vizsgába, az a versennyel kiválthatja a következı nyári szakmai gyakorlatot. Azt, hogy a jutalomnak melyik formáját kérik, a versenyzıknek nem kell elıre eldönteniük, elég azt megmondani a vizsga megírása után. 13

14 Idıpontok, lebonyolítás A verseny idıpontja január 15. (péntek), 10 óra. Helyszíne a V2 épület 5. emeleti folyosója. A pályát közvetlenül a verseny elıtt építjük fel, ekkor a robotokon már semmilyen módosítás nem engedélyezett (újraprogramozás sem). Ennek érdekében a robotokat (különleges esetben a programozáshoz szükséges számítógépet is) a verseny helyszínén legkésıbb 9 órakor le kell adni. A robotok a pálya mellett, a közönség számára is látható helyen lesznek kiállítva. A robotokon nagymérető, egyértelmő jelzés kell azonosítsa a versenyzı csapatot: - A csapat sorszáma - A csapat neve - A csapat logója (opcionális) A verseny elıtti héten január 8-án (pénteken) 10 és 15 óra között próbafutamokat tartunk a V2 épület 4. emeletén. Ekkor a versenypályával egyenértékő (de azzal meg nem egyezı) pályán robotjaik tesztelésre kapnak lehetıséget a versenyzık. A próbafutamokért semmilyen pont nem jár, de a megjelenés minden csapatnak erısen ajánlott. Kérjük a versenyzıket, hogy a próbafutamokra idıben érkezzenek, használják ki a rendelkezésre álló idıt. (Ha mindenki 14 órára érkezik, akkor nem fognak pályához jutni.) A próbafutamok alatt a V2.420-as labor nyitva lesz, a módosítások, finomhangolások, programbeállítások itt elvégezhetık. Felhívjuk a csapatok figyelmét, hogy a szükséges eszközöket (laptop, kézi multiméter, kézi szerszámok, akkutöltı stb.) hozzák magukkal, a laborban csak 230V-os hálózati feszültséget és szükség esetén forrasztópákát biztosítunk. Hangsúlyozzuk, hogy ezen a napon a valós környezet kipróbálása és a robotok finomhangolása a cél, nem itt kell hozzákezdeni az elektronika teszteléséhez vagy a programozáshoz! A versenyen való részvételhez minden csapatnak választania kell egy csapatnevet (esetleg egy csapatlogót), amelyet legkésıbb a próbafutamok alkalmával közölni kell a szervezıkkel. Név nélküli csapat nem versenyezhet. A csapat neve és sorszáma egyértelmően látható kell legyen a roboton a verseny során! Ajánlott ütemterv Ahhoz, hogy a robotok biztosan idıben elkészüljenek a versenyre, a következı ütemterv betartását ajánljuk. A dátumok természetesen csak irányadó idıpontok, úgy lettek meghatározva, hogy ezek mentén haladva a verseny minimumpontszámmal teljesíthetı legyen. A megadott idıpontoktól elmaradni nem érdemes, mert az a versenyen való sikertelen szereplés erıs veszélyét rejti magában. Gyorsabban haladni természetesen lehet (sıt ajánlott), érdemes a verseny elıtti utolsó hetekre minél több tartalék idıt hagyni az esetlegesen felmerülı hibák kijavítására, a versenystratégiák alapos kitesztelésére. Elsı villogó LED: október 5. (hétfı) Kiegészítı kártyák gyártásba leadva: október 26. (hétfı) Kiegészítı kártyák beültetve: november 16. (hétfı) Szenzorok, motorok kezelése alapszinten mőködik: november 23. (hétfı) Elágazás nélküli, folytonos vonalkövetése mőködik: november 30. (hétfı) 14

15 Függelék Rajz oldal Start- és célmezı 16 Vezetıvonal törési szöge és görbületi sugara 16 Alagút 17 Elágazás 18 Extra elágazás 18 Begyőjtıhely 19 Lerakóhely 20 A pályaelemek legyártása után végzett tesztek alapján - a hibalehetıségek csökkentése érdekében minimális mértékő módosítást hajtottunk végre egyes pályaelemeken (pl. a labdaadagolónál). A mellékletben található aktualizált rajzok a pályaelemek valóságos állapotát tükrözik. A versenyen alkalmazott pályaelemek méretei és vezetıvonaltól mért távolságaik a valóságban max. ±5 mm-rel térhetnek el a rajzokon megadottól. Az épített pályaelemek pontos elhelyezésének vagy helyzetük visszaállításának egyszerősítése céljából a versenypálya mentén pozícionáló jelöléseket (pályaelemmarkereket) fogunk elhelyezni. Ezek a jelölések a vezetıvonaltól és az ellenırzıpontoktól eltérı színő szalagból készülnek majd, elhelyezésük nem fogja zavarni a vezetıvonal felismerését. 15

16 Start- és célmezı Vezetıvonal törési szöge és görbületi sugara

17 Alagút

18 Elágazás Extra elágazás
19 Begyőjtıhely
20 Lerakóhely

RobonAUT Versenyleírás és szabályzat V 2.1. (2011. január 12.)
") RobonAUT 2011 Versenyleírás és szabályzat V 2.1 (2011. január 12.) A verseny célja A 2010/2011-es tanév őszi félévében másodszor kerül megrendezésre a RobonAUT robotverseny a BME Automatizálási és Alkalmazott
RobonAUT 2011 Versenyleírás és szabályzat V 2.1 (2011. január 12.) A verseny célja A 2010/2011-es tanév őszi félévében másodszor kerül megrendezésre a RobonAUT robotverseny a BME Automatizálási és Alkalmazott
BME Automatizálási és Alkalmazott Informatikai Tanszék
 2013 BME Automatizálási és Alkalmazott Informatikai Tanszék A verseny célja Önállóan működő robot, távirányítás nincs Minél rövidebb idő alatt végighaladni két akadálypályán A pályák előre ismert elemekből
2013 BME Automatizálási és Alkalmazott Informatikai Tanszék A verseny célja Önállóan működő robot, távirányítás nincs Minél rövidebb idő alatt végighaladni két akadálypályán A pályák előre ismert elemekből
Résztvevők. A Robotirányítás rendszertechnikája c. MSc tantárgy hallgatói 3 fős csapatok Csapatonként 1 robot
 2016 A verseny célja Önállóan működő robot, távirányítás nincs Minél rövidebb idő alatt végighaladni két versenypályán Ismert pályaelemek, ismeretlen pálya 2 Résztvevők A Robotirányítás rendszertechnikája
2016 A verseny célja Önállóan működő robot, távirányítás nincs Minél rövidebb idő alatt végighaladni két versenypályán Ismert pályaelemek, ismeretlen pálya 2 Résztvevők A Robotirányítás rendszertechnikája
Résztvevők. A Robotirányítás rendszertechnikája c. MSc tantárgy hallgatói 3 fős csapatok Csapatonként 1 robot
 2017 A verseny célja Önállóan működő robot, távirányítás nincs Minél rövidebb idő alatt végighaladni két versenypályán Ismert pályaelemek, ismeretlen pálya Résztvevők A Robotirányítás rendszertechnikája
2017 A verseny célja Önállóan működő robot, távirányítás nincs Minél rövidebb idő alatt végighaladni két versenypályán Ismert pályaelemek, ismeretlen pálya Résztvevők A Robotirányítás rendszertechnikája
Versenyleírás és szabályzat
 Versenyleírás és szabályzat V 1.2 (2013. január 8.) Budapesti Műszaki és Gazdaságtudományi Egyetem 1117 Budapest, Magyar tudósok körútja 2. Q épület, B szárny, II. em. 207. Villamosmérnöki és Informatikai
Versenyleírás és szabályzat V 1.2 (2013. január 8.) Budapesti Műszaki és Gazdaságtudományi Egyetem 1117 Budapest, Magyar tudósok körútja 2. Q épület, B szárny, II. em. 207. Villamosmérnöki és Informatikai
Versenyleírás és szabályzat
 Versenyleírás és szabályzat V 1.3 (2013. november 5.) Budapesti Műszaki és Gazdaságtudományi Egyetem Villamosmérnöki és Informatikai Kar Automatizálási és Alkalmazott Informatikai Tanszék 1117 Budapest,
Versenyleírás és szabályzat V 1.3 (2013. november 5.) Budapesti Műszaki és Gazdaságtudományi Egyetem Villamosmérnöki és Informatikai Kar Automatizálási és Alkalmazott Informatikai Tanszék 1117 Budapest,
Versenyleírás és szabályzat
 Versenyleírás és szabályzat V 1.5 (2014. január 5.) Budapesti Műszaki és Gazdaságtudományi Egyetem Villamosmérnöki és Informatikai Kar Automatizálási és Alkalmazott Informatikai Tanszék 1117 Budapest,
Versenyleírás és szabályzat V 1.5 (2014. január 5.) Budapesti Műszaki és Gazdaságtudományi Egyetem Villamosmérnöki és Informatikai Kar Automatizálási és Alkalmazott Informatikai Tanszék 1117 Budapest,
Versenyleírás és szabályzat
 Versenyleírás és szabályzat 2015. szeptember 9. Rev. 1.0 Budapesti Műszaki és Gazdaságtudományi Egyetem Villamosmérnöki és Informatikai Kar Automatizálási és Alkalmazott Informatikai Tanszék 1117 Budapest,
Versenyleírás és szabályzat 2015. szeptember 9. Rev. 1.0 Budapesti Műszaki és Gazdaságtudományi Egyetem Villamosmérnöki és Informatikai Kar Automatizálási és Alkalmazott Informatikai Tanszék 1117 Budapest,
VIII. Robotprogramozó Országos Csapatverseny Regionális versenyfeladatok évfolyam
 A robot portjainak kiosztása VIII. Robotprogramozó Országos Csapatverseny Regionális versenyfeladatok Motorok: B és C Szenzorok: Ütközésérzékelő: Fény/szín szenzor: Fény/szín szenzor: Ultrahang szenzor:
A robot portjainak kiosztása VIII. Robotprogramozó Országos Csapatverseny Regionális versenyfeladatok Motorok: B és C Szenzorok: Ütközésérzékelő: Fény/szín szenzor: Fény/szín szenzor: Ultrahang szenzor:
RCPortal Kóla-Csoki Derby 2013-2014 téli szınyeges sorozat
 RCPortal Kóla-Csoki Derby 2013-2014 téli szınyeges sorozat Szabályzata Indított kategóriák: Elektromos 1:10 túraautó KCSD kezdı kategória (Alap) Elektromos 1:10 túraautó KCSD haladó kategória (Alap) Elektromos
RCPortal Kóla-Csoki Derby 2013-2014 téli szınyeges sorozat Szabályzata Indított kategóriák: Elektromos 1:10 túraautó KCSD kezdı kategória (Alap) Elektromos 1:10 túraautó KCSD haladó kategória (Alap) Elektromos
PLC Versenyfeladat. XIV. Országos Irányítástechnikai Programozó Verseny Budapest, március Összeállította az EvoPro Kft.
 PLC Versenyfeladat XIV. Országos Irányítástechnikai Programozó Verseny Budapest, 2008. március 19-21. Összeállította az EvoPro Kft. Általános bemutatás A feladatban szereplő eszköz egy 8x8 képpontos LED-mátrix
PLC Versenyfeladat XIV. Országos Irányítástechnikai Programozó Verseny Budapest, 2008. március 19-21. Összeállította az EvoPro Kft. Általános bemutatás A feladatban szereplő eszköz egy 8x8 képpontos LED-mátrix
GYÜMÖLCSÖK GYŰJTÉSE ÉS VÁLOGATÁSA
 World Robot Olympiad 2018 WeDo Regular kategória (10 éves korig) A játék leírása, szabályok és pontozás AZ ÉLELMISZER FONTOS ÜGY GYÜMÖLCSÖK GYŰJTÉSE ÉS VÁLOGATÁSA Verzió: január 15. Tartalomjegyzék 1.
World Robot Olympiad 2018 WeDo Regular kategória (10 éves korig) A játék leírása, szabályok és pontozás AZ ÉLELMISZER FONTOS ÜGY GYÜMÖLCSÖK GYŰJTÉSE ÉS VÁLOGATÁSA Verzió: január 15. Tartalomjegyzék 1.
IV. LEGO Robotprogramozó Országos Csapatverseny
 BÁNYAI JÚLIA GIMNÁZIUM - ROBOTIKA CSOPORT Tel.: 76/481-474 (+36 20 479 8460) Fax.: 76/486-942 web: http://www.banyai-kkt.sulinet.hu/robotika e-mail: robotika.bjg@gmail.com IV. LEGO Robotprogramozó Országos
BÁNYAI JÚLIA GIMNÁZIUM - ROBOTIKA CSOPORT Tel.: 76/481-474 (+36 20 479 8460) Fax.: 76/486-942 web: http://www.banyai-kkt.sulinet.hu/robotika e-mail: robotika.bjg@gmail.com IV. LEGO Robotprogramozó Országos
A B.Sc. képzésben résztvevı hallgatók számára a diploma megszerzésének feltétele
 szöveg: Hajdók Ibolya TÁJÉKOZTATÓ (1) (2010 szeptemberében beiratkozó elsıéves hallgatóknak) A DIPLOMA MEGSZERZÉSÉNEK NYELVI FELTÉTELEI 1. AKKREDITÁLT NYELVVIZSGA A B.Sc. képzésben résztvevı hallgatók
szöveg: Hajdók Ibolya TÁJÉKOZTATÓ (1) (2010 szeptemberében beiratkozó elsıéves hallgatóknak) A DIPLOMA MEGSZERZÉSÉNEK NYELVI FELTÉTELEI 1. AKKREDITÁLT NYELVVIZSGA A B.Sc. képzésben résztvevı hallgatók
A jármővek méreteire vonatkozó üzemeltetési mőszaki feltételek
 A jármővek méreteire vonatkozó üzemeltetési mőszaki feltételek A mezıgazdasági vontatóból vagy lassú jármőbıl és egy pótkocsiból álló jármőszerelvény hosszúsága a 18,00, a mezıgazdasági vontatóból és két
A jármővek méreteire vonatkozó üzemeltetési mőszaki feltételek A mezıgazdasági vontatóból vagy lassú jármőbıl és egy pótkocsiból álló jármőszerelvény hosszúsága a 18,00, a mezıgazdasági vontatóból és két
Tanulmányi és Vizsgaszabályzat Társadalomtudományi Kar. Melléklet
 Tanulmányi és Vizsgaszabályzat Társadalomtudományi Kar Melléklet I. a nemzetközi kapcsolatok szakos közgazdász, politológus-közgazdász, szociológusközgazdász, szociálpolitikus-közgazdász, nemzetközi tanulmányok,
Tanulmányi és Vizsgaszabályzat Társadalomtudományi Kar Melléklet I. a nemzetközi kapcsolatok szakos közgazdász, politológus-közgazdász, szociológusközgazdász, szociálpolitikus-közgazdász, nemzetközi tanulmányok,
KÖRNYEZETVÉDELMI ÉS VÍZÜGYI MINISZTÉRIUM
 KÖRNYEZETVÉDELMI ÉS VÍZÜGYI MINISZTÉRIUM SZAKMAI TANULMÁNYI VERSENYEK VERSENYSZABÁLYZATA 2008-2009. NEMZETI SZAKKÉPZÉSI ÉS FELNİTTKÉPZÉSI INTÉZET Összeállította: Nádráné Tóth Borbála osztályvezetı koordinálásával
KÖRNYEZETVÉDELMI ÉS VÍZÜGYI MINISZTÉRIUM SZAKMAI TANULMÁNYI VERSENYEK VERSENYSZABÁLYZATA 2008-2009. NEMZETI SZAKKÉPZÉSI ÉS FELNİTTKÉPZÉSI INTÉZET Összeállította: Nádráné Tóth Borbála osztályvezetı koordinálásával
Szabályzat A szakmai gyakorlat lebonyolítására a Villamosmérnöki és Informatikai Karon 1. Kapcsolódó jogszabályok, dokumentumok Fels
 Szabályzat A szakmai gyakorlat lebonyolítására a Villamosmérnöki és Informatikai Karon Készült a Kari Tanács 2008. január 15-i ülésére 2008. január 10. (Németh Pál) Tartalom: 1. Kapcsolódó jogszabályok,
Szabályzat A szakmai gyakorlat lebonyolítására a Villamosmérnöki és Informatikai Karon Készült a Kari Tanács 2008. január 15-i ülésére 2008. január 10. (Németh Pál) Tartalom: 1. Kapcsolódó jogszabályok,
RCPortal Kóla-Csoki Derby 2014. RC Aréna
 RCPortal Kóla-Csoki Derby 2014. RC Aréna Szabályzat tervezete Indított kategóriák: Elektromos 1:10 túraautó ALAP kategória *** Elektromos 1:10 túraautó BRUSHED kategória Elektromos 1:10 túraautó STOCK
RCPortal Kóla-Csoki Derby 2014. RC Aréna Szabályzat tervezete Indított kategóriák: Elektromos 1:10 túraautó ALAP kategória *** Elektromos 1:10 túraautó BRUSHED kategória Elektromos 1:10 túraautó STOCK
VERSENYSZABÁLYZAT. Magyar Ifjúsági Robot Kupa Budapest Rescue Line (könnyített)
") VERSENYSZABÁLYZAT Magyar Ifjúsági Robot Kupa 2018. Budapest Rescue Line (könnyített) 1. Bevezető A kategóriát pedagógiai és közösségépítő szempontok hívták életre. Célja azoknak a versenyzőknek és mentoroknak
VERSENYSZABÁLYZAT Magyar Ifjúsági Robot Kupa 2018. Budapest Rescue Line (könnyített) 1. Bevezető A kategóriát pedagógiai és közösségépítő szempontok hívták életre. Célja azoknak a versenyzőknek és mentoroknak
Magyar Autómodell Bajnokság
 Magyar Autómodell Bajnokság ELEKTROMOTOROS KATEGÓRIÁK SZABÁLYZATA 2008 2009 ÁLTALÁNOS SZABÁLYOK ELEKTROMOS VERSENYEK MAB VERSENYKATEGÓRIÁK BETÉTKATEGÓRIÁK MELLÉKLETEK MAGYAR MODELLEZİ SZÖVETSÉG A szabályzat
Magyar Autómodell Bajnokság ELEKTROMOTOROS KATEGÓRIÁK SZABÁLYZATA 2008 2009 ÁLTALÁNOS SZABÁLYOK ELEKTROMOS VERSENYEK MAB VERSENYKATEGÓRIÁK BETÉTKATEGÓRIÁK MELLÉKLETEK MAGYAR MODELLEZİ SZÖVETSÉG A szabályzat
VI. Robotprogramozó Országos Csapatverseny évfolyam
 VI. Robotprogramozó Országos Csapatverseny Országos döntőjének versenyfeladatai 7-8. évfolyam 2015. április 25. A robot portjainak kiosztása: Motorok: B és C Szenzorok: Ütközésérzékelő (Touch): 1-es port
VI. Robotprogramozó Országos Csapatverseny Országos döntőjének versenyfeladatai 7-8. évfolyam 2015. április 25. A robot portjainak kiosztása: Motorok: B és C Szenzorok: Ütközésérzékelő (Touch): 1-es port
Nemzetközi Floorball Szövetség. Játékszabályok. Nemzetközi Floorball Szövetség, Szabály- és Versenybizottság. Nemzetközi Floorball Szövetség 2006.
 Nemzetközi Floorball Szövetség Játékszabályok Szabályok és értelmezésük Érvényes július 1-tıl Magyarországon érvényes 2007. augusztus 1-tıl Nemzetközi Floorball Szövetség, Szabály- és Versenybizottság
Nemzetközi Floorball Szövetség Játékszabályok Szabályok és értelmezésük Érvényes július 1-tıl Magyarországon érvényes 2007. augusztus 1-tıl Nemzetközi Floorball Szövetség, Szabály- és Versenybizottság
Alapképzésben, egységes, osztatlan képzésben és felsıfokú szakképzésben meghirdetett szakok. Képzési Képz. idı (félév) / Költségtérítés.
 / Költségtérítés.") DE-EFK Intézmény elérhetısége: Felvételivel kapcsolatos egyéb elérhetıség: 4400 Nyíregyháza, Sóstói u. 2-4. Telefon: (42) 404-411 Fax: (42) 408-656 Honlap: http://www.de-efk.hu Tanulmányi Osztály Telefon:
DE-EFK Intézmény elérhetısége: Felvételivel kapcsolatos egyéb elérhetıség: 4400 Nyíregyháza, Sóstói u. 2-4. Telefon: (42) 404-411 Fax: (42) 408-656 Honlap: http://www.de-efk.hu Tanulmányi Osztály Telefon:
TANEGYSÉGLISTA (MA) ASSZÍRIOLÓGIA MESTERKÉPZÉSI SZAK (MA) A SZAKOT GONDOZÓ INTÉZET: ÁLTALÁNOS TUDNIVALÓK A SZAKRÓL: A mesterképzési szak megnevezése:
 ASSZÍRIOLÓGIA MESTERKÉPZÉSI SZAK (MA) A SZAKOT GONDOZÓ INTÉZET: ÁLTALÁNOS TUDNIVALÓK A SZAKRÓL: A mesterképzési szak megnevezése:") TANEGYSÉGLISTA (MA) Jelek, rövidítések: D = dolgozat G = gyakorlati jegy K = kollokvium Sz = szigorlat V = vizsga Z = szakzáróvizsga kon = konzultáció k = kötelezı tanegység kv = kötelezıen választható
TANEGYSÉGLISTA (MA) Jelek, rövidítések: D = dolgozat G = gyakorlati jegy K = kollokvium Sz = szigorlat V = vizsga Z = szakzáróvizsga kon = konzultáció k = kötelezı tanegység kv = kötelezıen választható
World Robot Olympiad2019. Regular kategória Junior korosztály SMART CITIES- OKOS VÁROSOK OKOS VILÁGÍTÁS. Verzió: December 1.
 World Robot Olympiad2019 Regular kategória Junior korosztály SMART CITIES- OKOS VÁROSOK OKOS VILÁGÍTÁS Verzió: December 1. WRO Nemzetközi Prémium Partnerek Tartalomjegyzék 1. Bevezetés... 2 2. Az asztal
World Robot Olympiad2019 Regular kategória Junior korosztály SMART CITIES- OKOS VÁROSOK OKOS VILÁGÍTÁS Verzió: December 1. WRO Nemzetközi Prémium Partnerek Tartalomjegyzék 1. Bevezetés... 2 2. Az asztal
Attól, hogy nem inog horizontális irányban a szélességi- és hosszúsági tengelye körül sem.
 Konkrét tanácsok a Salgó-dexion polcrendszer összeszereléséhez Vásárlásunk során a Salgó-dexion polcokat, polcrendszereket sokféle módon állíthatjuk össze az igénybe vételnek, felhasználásnak, valamint
Konkrét tanácsok a Salgó-dexion polcrendszer összeszereléséhez Vásárlásunk során a Salgó-dexion polcokat, polcrendszereket sokféle módon állíthatjuk össze az igénybe vételnek, felhasználásnak, valamint
OKOS SZEMÉLYSZÁLLÍTÁS
 World Robot Olympiad 2019 Regular kategória Elementary korosztály A játék leírása, szabályok és pontozás SMART CITIES OKOS VÁROSOK OKOS SZEMÉLYSZÁLLÍTÁS Verzió: Végleges Változat Január15. Tartalomjegyzék
World Robot Olympiad 2019 Regular kategória Elementary korosztály A játék leírása, szabályok és pontozás SMART CITIES OKOS VÁROSOK OKOS SZEMÉLYSZÁLLÍTÁS Verzió: Végleges Változat Január15. Tartalomjegyzék
A 2017/2018 tanévi Országos Középiskolai Tanulmányi Verseny döntő fordulójának feladatai. INFORMATIKA II. (programozás) kategória
 kategória") Oktatási Hivatal A 217/218 tanévi Országos Középiskolai Tanulmányi Verseny döntő fordulójának feladatai 1. feladat: Csatornák (24 pont) INFORMATIKA II. (programozás) kategória Egy város csomópontjait csatornahálózat
Oktatási Hivatal A 217/218 tanévi Országos Középiskolai Tanulmányi Verseny döntő fordulójának feladatai 1. feladat: Csatornák (24 pont) INFORMATIKA II. (programozás) kategória Egy város csomópontjait csatornahálózat
VERSENYFELHÍVÁS. A verseny célja:
 VERSENYFELHÍVÁS A Hajdúböszörményi Bocskai István Gimnázium, a Kecskeméti Bányai Júlia Gimnázium valamint a Nyugat-magyarországi Egyetem Informatikai és Gazdasági Intézete a Soproni Széchenyi István Gimnáziummal
VERSENYFELHÍVÁS A Hajdúböszörményi Bocskai István Gimnázium, a Kecskeméti Bányai Júlia Gimnázium valamint a Nyugat-magyarországi Egyetem Informatikai és Gazdasági Intézete a Soproni Széchenyi István Gimnáziummal
Mőszaki kiírás. A IV. Elektromobil verseny mőszaki kiírása. 2011. október
 A IV. Elektrmbil verseny mőszaki kiírása 2011. któber IV. Elektrmbil verseny 1. Általáns feltételek: a. Feladat egy lyan jármő ELEKTROMOBIL - tervezése és elkészítése, amelyet 8 db BOSCH PSR 18 LI-2 akkumulátrs
A IV. Elektrmbil verseny mőszaki kiírása 2011. któber IV. Elektrmbil verseny 1. Általáns feltételek: a. Feladat egy lyan jármő ELEKTROMOBIL - tervezése és elkészítése, amelyet 8 db BOSCH PSR 18 LI-2 akkumulátrs
HA8EV ORBITRON Programmal vezérelt Azimut/Elevációs forgató elektronika v10.0
 HA8EV ORBITRON Programmal vezérelt Azimut/Elevációs forgató elektronika v10.0 Copyright 2010 HA8EV Szőcs Péter Tartalomjegyzék: 1.) Bevezetés 3 2.) Az áramkör rövid ismertetése 3 3.) A szoftver funkcióinak
HA8EV ORBITRON Programmal vezérelt Azimut/Elevációs forgató elektronika v10.0 Copyright 2010 HA8EV Szőcs Péter Tartalomjegyzék: 1.) Bevezetés 3 2.) Az áramkör rövid ismertetése 3 3.) A szoftver funkcióinak
TANTÁRGYI ÚTMUTATÓ a
 Számvitel Intézeti Tanszék /fax: 383-8480 Budapest 72. Pf.: 35. 1426 III. évfolyam Pénzügy és Számvitel Szak, Számvitel szakirány TANTÁRGYI ÚTMUTATÓ a Számviteli sajátosságok tantárgy tanulmányozásához
Számvitel Intézeti Tanszék /fax: 383-8480 Budapest 72. Pf.: 35. 1426 III. évfolyam Pénzügy és Számvitel Szak, Számvitel szakirány TANTÁRGYI ÚTMUTATÓ a Számviteli sajátosságok tantárgy tanulmányozásához
BIZTONSÁGI KAPCSOLATOK
 ÁLTALÁNOS LEÍRÁS CAME alap vezérlés 230V-os egyfázisú szárnyaskapu meghajtásokhoz, AF frekvenciakártya kapcsolattal, max. 320W teljesítménnyel. A terméket teljes egészében a CAME Cancelli Automatici SPA.
ÁLTALÁNOS LEÍRÁS CAME alap vezérlés 230V-os egyfázisú szárnyaskapu meghajtásokhoz, AF frekvenciakártya kapcsolattal, max. 320W teljesítménnyel. A terméket teljes egészében a CAME Cancelli Automatici SPA.
σhúzó,n/mm 2 εny A FA HAJLÍTÁSA
 A FA HAJLÍTÁSA A fa hajlítása a fa megmunkálásának egyik igen fontos módja. A hajlítás legfıbb elınye az anyagmegtakarítás, mivel az íves alkatrészek elıállításánál a kisebb keresztmetszeti méretek mellett
A FA HAJLÍTÁSA A fa hajlítása a fa megmunkálásának egyik igen fontos módja. A hajlítás legfıbb elınye az anyagmegtakarítás, mivel az íves alkatrészek elıállításánál a kisebb keresztmetszeti méretek mellett
Absztrakt feltöltése az ITDK 2013 konferenciára
 Absztrakt feltöltése az ITDK 2013 konferenciára 1. regisztráció A rendszer használatához elıször is regisztrációra van szükség. Ezt a felhasználó a kezdıképernyı jobb felsı sarkában lévı Bejelentkezés
Absztrakt feltöltése az ITDK 2013 konferenciára 1. regisztráció A rendszer használatához elıször is regisztrációra van szükség. Ezt a felhasználó a kezdıképernyı jobb felsı sarkában lévı Bejelentkezés
Megújuló és tiszta energia
 World Robot Olympiad 2017 Regular Kategória SENIOR Játékleírás, szabályok és pontozás Sustainabots [Robotok a fenntarthatóságért] Megújuló és tiszta energia Ez a dokumentum a World Robot Olympiad magyarországi
World Robot Olympiad 2017 Regular Kategória SENIOR Játékleírás, szabályok és pontozás Sustainabots [Robotok a fenntarthatóságért] Megújuló és tiszta energia Ez a dokumentum a World Robot Olympiad magyarországi
Climate Connections Robotfeladatok
 Climate Connections Robotfeladatok Elıször olvassátok el Minden csapatnak ajánljuk, hogy elıször olvassa el és próbálja megérteni az alábbi NÉGY dokumentumot: A pálya és a tárgyak elhelyezése Robotfeladatok
Climate Connections Robotfeladatok Elıször olvassátok el Minden csapatnak ajánljuk, hogy elıször olvassa el és próbálja megérteni az alábbi NÉGY dokumentumot: A pálya és a tárgyak elhelyezése Robotfeladatok
HA8EV Antennaforgató vezérlı 6.0e
 HA8EV Antennaforgató vezérlı 6.0e Copyright 2010 HA8EV Szőcs Péter Tartalomjegyzék: 1.) Bevezetés 3 2.) Az áramkör rövid ismertetése 3 3.) Az áramkör kalibrálása 4 4.) Nulla pozíció, avagy végállás keresése
HA8EV Antennaforgató vezérlı 6.0e Copyright 2010 HA8EV Szőcs Péter Tartalomjegyzék: 1.) Bevezetés 3 2.) Az áramkör rövid ismertetése 3 3.) Az áramkör kalibrálása 4 4.) Nulla pozíció, avagy végállás keresése
TR CONSULT RALLYE SPRINT BAJNOKSÁG 2011
 TR CONSULT RALLYE SPRINT BAJNOKSÁG 2011 RSB 2011 2 TR CONSULT Rallye Sprint Bajnokság 2011 1. ÁLTALÁNOS SZABÁLYOK 1.1. A Balatonyi Racing Team és a Marco Racing Team Kft. (a továbbiakban BRT-MRT), 2011.
TR CONSULT RALLYE SPRINT BAJNOKSÁG 2011 RSB 2011 2 TR CONSULT Rallye Sprint Bajnokság 2011 1. ÁLTALÁNOS SZABÁLYOK 1.1. A Balatonyi Racing Team és a Marco Racing Team Kft. (a továbbiakban BRT-MRT), 2011.
PLUSZ ügyességi versenyeken használt akadály típusok.
 PLUSZ ügyességi versenyeken használt akadály típusok. A bója akadályok építhetők kicsi vagy nagy bójából, a labirintusban és a beékező és kiérkező bójakapuk csak kis bójából építhetők. Minden bója tetején
PLUSZ ügyességi versenyeken használt akadály típusok. A bója akadályok építhetők kicsi vagy nagy bójából, a labirintusban és a beékező és kiérkező bójakapuk csak kis bójából építhetők. Minden bója tetején
14. SZABÁLY A BÜNTETİRÚGÁS. PDF Created with deskpdf PDF Writer - Trial ::
 14. SZABÁLY PDF Created with deskpdf PDF Writer - Trial :: http://www.docudesk.com Büntetırúgás jár az ellen a csapat ellen, amely elköveti a közvetlen szabadrúgást maga után vonó tíz szabálytalanság valamelyikét
14. SZABÁLY PDF Created with deskpdf PDF Writer - Trial :: http://www.docudesk.com Büntetırúgás jár az ellen a csapat ellen, amely elköveti a közvetlen szabadrúgást maga után vonó tíz szabálytalanság valamelyikét
KÉPZİI FELHÍVÁS. Cím: 1134 Budapest, Tüzér u. 33-35. Tel.: +36 (1) 237-6700 Fax: +36 (1) 237-6760 www.yia.hu www.eurodesk.hu
 237-6700 Fax: +36 (1) 237-6760 www.yia.hu www.eurodesk.hu") KÉPZİI FELHÍVÁS Tárgy Megérkezés utáni képzés (4 alkalom) Félidıs értékelı találkozó (4 alkalom) (6 hónapnál hosszabb önkéntes szolgálat esetében) Kiíró NCSSZI Fiatalok Lendületben Programiroda és a Konszenzus
KÉPZİI FELHÍVÁS Tárgy Megérkezés utáni képzés (4 alkalom) Félidıs értékelı találkozó (4 alkalom) (6 hónapnál hosszabb önkéntes szolgálat esetében) Kiíró NCSSZI Fiatalok Lendületben Programiroda és a Konszenzus
AZ ÉLELMISZEREK ELOSZTÁSA
 World Robot Olympiad 2018 Regular kategória Senior korosztály A játék leírása, szabályok és pontozás AZ ÉLELMISZER FONTOS ÜGY AZ ÉLELMISZEREK ELOSZTÁSA Verzió: Végleges változat január 15. Tartalomjegyzék
World Robot Olympiad 2018 Regular kategória Senior korosztály A játék leírása, szabályok és pontozás AZ ÉLELMISZER FONTOS ÜGY AZ ÉLELMISZEREK ELOSZTÁSA Verzió: Végleges változat január 15. Tartalomjegyzék
Biztonsági rendszerekek 2 Vezérlı berendezés
 Biztonsági rendszerekek 2 Vezérlı berendezés Villamosmérnök BSc szak Az irányítási feladatot megoldó berendezés Alapjeladó Összehasonlító Kezelı felület Érzékelı Szabályozó Központi vezérlı Vasúti folyamat
Biztonsági rendszerekek 2 Vezérlı berendezés Villamosmérnök BSc szak Az irányítási feladatot megoldó berendezés Alapjeladó Összehasonlító Kezelı felület Érzékelı Szabályozó Központi vezérlı Vasúti folyamat
VII. Székesfehérvári Hagyományőrző Tűzoltó Verseny versenyszabályzata
 A Havranek József Tűzvédelmi Alapítvány és a Székesfehérvári Hivatásos Tűzoltóság Szervezésében megrendezésre kerülő VII. Székesfehérvári Hagyományőrző Tűzoltó Verseny versenyszabályzata 2014-1 - I. fejezet
A Havranek József Tűzvédelmi Alapítvány és a Székesfehérvári Hivatásos Tűzoltóság Szervezésében megrendezésre kerülő VII. Székesfehérvári Hagyományőrző Tűzoltó Verseny versenyszabályzata 2014-1 - I. fejezet
Tájékoztató a kétszintő érettségi vizsgáról
 Tájékoztató a kétszintő érettségi vizsgáról Készítette: Fencz Györgyné igh A kétszintő érettségi néhány jellemzıje Követelmények jogszabályokban (100/1997 kormányrendelet; 40/2002 OM rendelet) Nyitott
Tájékoztató a kétszintő érettségi vizsgáról Készítette: Fencz Györgyné igh A kétszintő érettségi néhány jellemzıje Követelmények jogszabályokban (100/1997 kormányrendelet; 40/2002 OM rendelet) Nyitott
IpP-CsP2. Baromfi jelölı berendezés általános leírás. Típuskód: IpP-CsP2. Copyright: P. S. S. Plussz Kft, 2009
 IpP-CsP2 Baromfi jelölı berendezés általános leírás Típuskód: IpP-CsP2 Tartalomjegyzék 1. Készülék felhasználási területe 2. Mőszaki adatok 3. Mőszaki leírás 3.1 Állvány 3.2 Burkolat 3.3 Pneumatikus elemek
IpP-CsP2 Baromfi jelölı berendezés általános leírás Típuskód: IpP-CsP2 Tartalomjegyzék 1. Készülék felhasználási területe 2. Mőszaki adatok 3. Mőszaki leírás 3.1 Állvány 3.2 Burkolat 3.3 Pneumatikus elemek
Chat felhasználói segédlet
 Chat felhasználói segédlet A Chat indítása, regisztráció, belépés A Chatre a honlapról www.smlista.hu, vagy a http://chat.smlista.hu címrıl lehet belépni. A fıoldalon van a belépés a Chatre, ha már van
Chat felhasználói segédlet A Chat indítása, regisztráció, belépés A Chatre a honlapról www.smlista.hu, vagy a http://chat.smlista.hu címrıl lehet belépni. A fıoldalon van a belépés a Chatre, ha már van
Felsıoktatási felvételi eljárás
 Felsıoktatási felvételi eljárás Dr. Bakos Károly vezetı fıtanácsos Alapelvek A felsıoktatásba egységes rangsorolás alapján a legjobban felkészült és legjobb teljesítményt nyújtó jelentkezık kerüljenek
Felsıoktatási felvételi eljárás Dr. Bakos Károly vezetı fıtanácsos Alapelvek A felsıoktatásba egységes rangsorolás alapján a legjobban felkészült és legjobb teljesítményt nyújtó jelentkezık kerüljenek
Szabó Júlia-Vízy Zsolt: A szaktanácsadói munka tapasztalatai a képesség- készségfejlesztés területén (Földünk és környezetünk mőveltségterület)
") Szabó Júlia-Vízy Zsolt: A szaktanácsadói munka tapasztalatai a képesség- készségfejlesztés területén (Földünk és környezetünk mőveltségterület) 1. Bevezetés (2. rész) A Budapesti Nevelı c. folyóirat 2007.
Szabó Júlia-Vízy Zsolt: A szaktanácsadói munka tapasztalatai a képesség- készségfejlesztés területén (Földünk és környezetünk mőveltségterület) 1. Bevezetés (2. rész) A Budapesti Nevelı c. folyóirat 2007.
2010.október 17. MERENYE
 A verseny idıpontja: 2010. október 17. 08,00-13,00 óráig Helye: Merenyei Víztározó Elsı ízben kerül megrendezésre az I. ABSF - Merenye Süllıpergetı Kupa 2010. október 30-án. Bízunk a verseny sikerességében,
A verseny idıpontja: 2010. október 17. 08,00-13,00 óráig Helye: Merenyei Víztározó Elsı ízben kerül megrendezésre az I. ABSF - Merenye Süllıpergetı Kupa 2010. október 30-án. Bízunk a verseny sikerességében,
RALLYE SPRINT BAJNOKSÁG 2009 RSB 2009 2
 RSB 2009 2 Rallye Sprint Bajnokság 2009 1. ÁLTALÁNOS SZABÁLYOK 1.1. A Balatonyi Racing Team és a Marco Racing Team Kft. (a továbbiakban BRT-MRT), 2009. évre Rallye Sprint Bajnokság 2009 névvel versenysorozatot
RSB 2009 2 Rallye Sprint Bajnokság 2009 1. ÁLTALÁNOS SZABÁLYOK 1.1. A Balatonyi Racing Team és a Marco Racing Team Kft. (a továbbiakban BRT-MRT), 2009. évre Rallye Sprint Bajnokság 2009 névvel versenysorozatot
2 - ELEKTROMOS BEKÖTÉSEK
 4. oldal 2A A VEZETÉKEK KERESZTMETSZETE 2 - ELEKTROMOS BEKÖTÉSEK - A vezérlıegység áramellátását (a külsı biztosítódobozának csatlakozókapcsán) egy legalább 3x1,5 mm 2 - es vezetékkel kell megoldani. Amennyiben
4. oldal 2A A VEZETÉKEK KERESZTMETSZETE 2 - ELEKTROMOS BEKÖTÉSEK - A vezérlıegység áramellátását (a külsı biztosítódobozának csatlakozókapcsán) egy legalább 3x1,5 mm 2 - es vezetékkel kell megoldani. Amennyiben
Digitálistechnika II. 1. rész
 Digitálistechnika II. 1. rész Oktatási cél: A tárgy keretében a Digitális technika I. tárgyban szerzett elméleti ismeretek elmélyítésére kerül sor. A hallgatók gyakorlati feladat-megoldások segítségével
Digitálistechnika II. 1. rész Oktatási cél: A tárgy keretében a Digitális technika I. tárgyban szerzett elméleti ismeretek elmélyítésére kerül sor. A hallgatók gyakorlati feladat-megoldások segítségével
SPW-1002 BESZÉLİ ZSEBÓRA HASZNÁLATI UTASÍTÁS
 SPW-1002 BESZÉLİ ZSEBÓRA HASZNÁLATI UTASÍTÁS ID:7004 CE A zsebóra tulajdonságai Egygombos mőködtetés és programozás, magyarul beszélı menü segítségével. A készüléket nem kell sem bekapcsolni, sem kikapcsolni,
SPW-1002 BESZÉLİ ZSEBÓRA HASZNÁLATI UTASÍTÁS ID:7004 CE A zsebóra tulajdonságai Egygombos mőködtetés és programozás, magyarul beszélı menü segítségével. A készüléket nem kell sem bekapcsolni, sem kikapcsolni,
Maraton versenyszabályzat
 Nevezési feltételek: Maraton versenyszabályzat Egy mőszakilag biztonságos, a verseny szabályainak megfelelı kerékpár,+ biztonsági felszerelés 14-18 éves kor között szülıi beleegyezı nyilatkozat szükséges.
Nevezési feltételek: Maraton versenyszabályzat Egy mőszakilag biztonságos, a verseny szabályainak megfelelı kerékpár,+ biztonsági felszerelés 14-18 éves kor között szülıi beleegyezı nyilatkozat szükséges.
Virágom, virágom. A játék menete: A játékosok egymás után dobnak a dobókockával.
 Vár a fészek Színdobókockás játék 3 éven felüli gyerekeknek, 2-6 játékos 1 db játéktábla, 6 db játékfigura, 1 db színdobókocka Ennek a játéknak az örömét és izgalmát fokozza, ha a fészekben egy kis nyeremény
Vár a fészek Színdobókockás játék 3 éven felüli gyerekeknek, 2-6 játékos 1 db játéktábla, 6 db játékfigura, 1 db színdobókocka Ennek a játéknak az örömét és izgalmát fokozza, ha a fészekben egy kis nyeremény
NÉGYOSZTÁLYOS FELVÉTELI Részletes megoldás és pontozás a Gyakorló feladatsor II.-hoz
 NÉGYOSZTÁLYOS FELVÉTELI Részletes megoldás és pontozás a Gyakorló feladatsor II.-hoz Gedeon Veronika (Budapest) A javítókulcsban feltüntetett válaszokra a megadott pontszámok adhatók. A pontszámok részekre
NÉGYOSZTÁLYOS FELVÉTELI Részletes megoldás és pontozás a Gyakorló feladatsor II.-hoz Gedeon Veronika (Budapest) A javítókulcsban feltüntetett válaszokra a megadott pontszámok adhatók. A pontszámok részekre
Beszámíthatósági szabályzat Beszámíthatósági óratervek
 Beszámíthatósági szabályzat Beszámíthatósági óratervek 6-. sz. melléklet Bevezetve a 2008/2009-es tanévtıl szakiskolai évfolyamokon A szakképzésbıl lehozott elméleti és gyakorlati ismeretszerzés elfogadásának
Beszámíthatósági szabályzat Beszámíthatósági óratervek 6-. sz. melléklet Bevezetve a 2008/2009-es tanévtıl szakiskolai évfolyamokon A szakképzésbıl lehozott elméleti és gyakorlati ismeretszerzés elfogadásának
A lehetséges kérdések
 A lehetséges kérdések A következı fejezet tartalmazza az üzemeltetésben részt vevı hallgatók által az üzemeltetés elıtt írandó zárthelyi, zártkönyves dolgozat lehetséges kérdéseit, témakörökre bontva.
A lehetséges kérdések A következı fejezet tartalmazza az üzemeltetésben részt vevı hallgatók által az üzemeltetés elıtt írandó zárthelyi, zártkönyves dolgozat lehetséges kérdéseit, témakörökre bontva.
A Sport XXI. Terem Atlétikai Verseny gyakorlatanyaga
 A Sport XXI. Terem Atlétikai Verseny gyakorlatanyaga T1 / 1. Sprint váltó 1 1. A meghatározott létszámú csapat (8fő) egy 3m x 0,8m alapterületű területen áll fel a futás 2. A gyermekek tetszőleges sorrendben
A Sport XXI. Terem Atlétikai Verseny gyakorlatanyaga T1 / 1. Sprint váltó 1 1. A meghatározott létszámú csapat (8fő) egy 3m x 0,8m alapterületű területen áll fel a futás 2. A gyermekek tetszőleges sorrendben
Bakonyi Szakképzés-szervezési Társulás HATÁROZAT ... ...
 Bakonyi Szakképzés-szervezési Társulás...... HATÁROZAT Szám: 7/2009. (III.16.) BTT határozat Tárgy: A Bakonyi Szakképzés-szervezési Társulás Társulási Tanács Közbeszerzési szabályzatának elfogadása A Bakonyi
Bakonyi Szakképzés-szervezési Társulás...... HATÁROZAT Szám: 7/2009. (III.16.) BTT határozat Tárgy: A Bakonyi Szakképzés-szervezési Társulás Társulási Tanács Közbeszerzési szabályzatának elfogadása A Bakonyi
Roger UT-2. Kommunikációs interfész V3.0
 ROGER UT-2 1 Roger UT-2 Kommunikációs interfész V3.0 TELEPÍTŐI KÉZIKÖNYV ROGER UT-2 2 ÁLTALÁNOS LEÍRÁS Az UT-2 elektromos átalakítóként funkcionál az RS232 és az RS485 kommunikációs interfész-ek között.
ROGER UT-2 1 Roger UT-2 Kommunikációs interfész V3.0 TELEPÍTŐI KÉZIKÖNYV ROGER UT-2 2 ÁLTALÁNOS LEÍRÁS Az UT-2 elektromos átalakítóként funkcionál az RS232 és az RS485 kommunikációs interfész-ek között.
A Baross Gábor pályázat keretében létrehozott Solo elektromos hibrid autó projekt összefoglalása
 A Baross Gábor pályázat keretében létrehozott Solo elektromos hibrid autó projekt összefoglalása Baross Gábor Program Nyugat-dunántúli Innovációs Fejlesztések ND_INRG_05-TAUMOBIL Az elsı magyar alternatív
A Baross Gábor pályázat keretében létrehozott Solo elektromos hibrid autó projekt összefoglalása Baross Gábor Program Nyugat-dunántúli Innovációs Fejlesztések ND_INRG_05-TAUMOBIL Az elsı magyar alternatív
I. ADATLAP - A program általános tartalma. 2.1 Általános képzés 2.2 Nyelvi képzés 2.3 Szakmai képzés X 2.4. Egyéb
 I. ADATLAP - A program általános tartalma 1. A program megnevezése 1.1. Munkaerıpiaci tréning OKJ-s program esetén 1.2. OKJ száma is - 2. A program besorolása Csak egy terület jelölhetı meg! 2.1 Általános
I. ADATLAP - A program általános tartalma 1. A program megnevezése 1.1. Munkaerıpiaci tréning OKJ-s program esetén 1.2. OKJ száma is - 2. A program besorolása Csak egy terület jelölhetı meg! 2.1 Általános
A SUN POWER KIT TELEPÍTÉSÉNEK LEÍRÁSA. Leírás telepítő szakemberek részére!
 A SUN POWER KIT TELEPÍTÉSÉNEK LEÍRÁSA Leírás telepítő szakemberek részére! ÁLTALÁNOS LEÍRÁS A Sun Power berendezés a 24 V-os Telcoma automatizációk mozgatására lett tervezve, szükségtelenné téve a 230
A SUN POWER KIT TELEPÍTÉSÉNEK LEÍRÁSA Leírás telepítő szakemberek részére! ÁLTALÁNOS LEÍRÁS A Sun Power berendezés a 24 V-os Telcoma automatizációk mozgatására lett tervezve, szükségtelenné téve a 230
83/2004. (VI. 4.) GKM rendelet. a közúti jelzőtáblák megtervezésének, alkalmazásának és elhelyezésének követelményeiről
 GKM rendelet. a közúti jelzőtáblák megtervezésének, alkalmazásának és elhelyezésének követelményeiről") 83/2004. (VI. 4.) GKM rendelet a közúti jelzőtáblák megtervezésének, alkalmazásának és elhelyezésének követelményeiről A közúti közlekedésrıl szóló 1988. évi I. törvény 48. -a (3) bekezdése b) pontjának
83/2004. (VI. 4.) GKM rendelet a közúti jelzőtáblák megtervezésének, alkalmazásának és elhelyezésének követelményeiről A közúti közlekedésrıl szóló 1988. évi I. törvény 48. -a (3) bekezdése b) pontjának
Szerepjáték Project Story of my life
 Szerepjáték Project Story of my life Leírás A feladat egy konzol felületű játék elkészítése, amely betekintést kíván adni egy egyetemista életébe. A játék felépítését tekintve szerepjáték, de nem a szokásos
Szerepjáték Project Story of my life Leírás A feladat egy konzol felületű játék elkészítése, amely betekintést kíván adni egy egyetemista életébe. A játék felépítését tekintve szerepjáték, de nem a szokásos
U9600. Motor leírás. MotorLeírás U9600. KLING Kft ÁLTALÁNOS LEÍRÁS
 ÁLTALÁNOS LEÍRÁS A BX-324 tolókapumotor egy a CAME CANCELLI AUTOMATICI S.p.a által tervezett és gyártott elektromos kapunyitó berendezés. A termék háza IP54 védelemmel lett gyártva. Maximális terhelhetıség
ÁLTALÁNOS LEÍRÁS A BX-324 tolókapumotor egy a CAME CANCELLI AUTOMATICI S.p.a által tervezett és gyártott elektromos kapunyitó berendezés. A termék háza IP54 védelemmel lett gyártva. Maximális terhelhetıség
VI. Robotprogramozó Országos Csapatverseny Döntő versenyfeladatok. 5. évfolyam
 VI. Robotprogramozó Országos Csapatverseny Döntő versenyfeladatok 5. évfolyam 2015. április 25. A robot portjainak kiosztása: Motorok: B és C Szenzorok: Ütközésérzékelő (Touch): Fényszenzor/színszenzor
VI. Robotprogramozó Országos Csapatverseny Döntő versenyfeladatok 5. évfolyam 2015. április 25. A robot portjainak kiosztása: Motorok: B és C Szenzorok: Ütközésérzékelő (Touch): Fényszenzor/színszenzor
1.2. Mozgó, hajlékony és rugalmas tengelykapcsolók.
 1.2. Mozgó, hajlékony és rugalmas tengelykapcsolók. Tevékenység: Olvassa el a jegyzet 18-29 oldalain található tananyagát! Tanulmányozza át a segédlet 8.2. és 8.3. fejezeteiben lévı kidolgozott feladatait,
1.2. Mozgó, hajlékony és rugalmas tengelykapcsolók. Tevékenység: Olvassa el a jegyzet 18-29 oldalain található tananyagát! Tanulmányozza át a segédlet 8.2. és 8.3. fejezeteiben lévı kidolgozott feladatait,
Garázskapu nyitó. Kezelési útmutató
 RoboBox 50 Garázskapu nyitó Kezelési útmutató Mozgatható tömeg 50 kg Beállítható kimeneti teljesítmény korlát Távvezérlı tanuló funkció Gyors hajtásmegszakítási lehetıség Könnyő telepíthetıség 1 MŐSZAKI
RoboBox 50 Garázskapu nyitó Kezelési útmutató Mozgatható tömeg 50 kg Beállítható kimeneti teljesítmény korlát Távvezérlı tanuló funkció Gyors hajtásmegszakítási lehetıség Könnyő telepíthetıség 1 MŐSZAKI
5.1. GERENDÁS FÖDÉMEK KIALAKÍTÁSA, TERVEZÉSI ELVEI
 5. FÖDÉMEK TERVEZÉSE 5.1. GERENDÁS FÖDÉMEK KIALAKÍTÁSA, TERVEZÉSI ELVEI Az alábbiakban az Épületszerkezettan 2. c. tárgy tanmenetének megfelelıen a teljes keresztmetszetben, ill. félig elıregyártott vb.
5. FÖDÉMEK TERVEZÉSE 5.1. GERENDÁS FÖDÉMEK KIALAKÍTÁSA, TERVEZÉSI ELVEI Az alábbiakban az Épületszerkezettan 2. c. tárgy tanmenetének megfelelıen a teljes keresztmetszetben, ill. félig elıregyártott vb.
179/2003. (XI. 5.) Korm. rendelet. I. Fejezet ÁLTALÁNOS RENDELKEZÉSEK. Értelmezı rendelkezések
 Korm. rendelet. I. Fejezet ÁLTALÁNOS RENDELKEZÉSEK. Értelmezı rendelkezések") 179/2003. (XI. 5.) Korm. rendelet a nemzetközi szerzıdés alapján átvett, vagy nemzetközi kötelezettségvállalás alapján készült minısített adat védelmének eljárási szabályairól Az államtitokról és a szolgálati
179/2003. (XI. 5.) Korm. rendelet a nemzetközi szerzıdés alapján átvett, vagy nemzetközi kötelezettségvállalás alapján készült minısített adat védelmének eljárási szabályairól Az államtitokról és a szolgálati
Vízóra minıségellenırzés H4
 Vízóra minıségellenırzés H4 1. A vízórák A háztartási vízfogyasztásmérık tulajdonképpen kis turbinák: a mérın átáramló víz egy lapátozással ellátott kereket forgat meg. A kerék által megtett fordulatok
Vízóra minıségellenırzés H4 1. A vízórák A háztartási vízfogyasztásmérık tulajdonképpen kis turbinák: a mérın átáramló víz egy lapátozással ellátott kereket forgat meg. A kerék által megtett fordulatok
A Szlovákiai Magyar Cserkészszövetség. Országos Métabajnokságának szabályzata
 A Szlovákiai Magyar Cserkészszövetség Országos Métabajnokságának szabályzata 1. A játék menetéről általában A játék során két csapat: az ütő ( A csapat) és a fogó ( B csapat) küzd egymással a pontokért.
A Szlovákiai Magyar Cserkészszövetség Országos Métabajnokságának szabályzata 1. A játék menetéről általában A játék során két csapat: az ütő ( A csapat) és a fogó ( B csapat) küzd egymással a pontokért.
Fenntartható turizmus
 World Robot Olympiad 2017 Regular Kategória ELEMENTARY Játékleírás, szabályok és pontozás Sustainabots [Robotok a fenntarthatóságért] Fenntartható turizmus Ez a dokumentum a World Robot Olympiad magyarországi
World Robot Olympiad 2017 Regular Kategória ELEMENTARY Játékleírás, szabályok és pontozás Sustainabots [Robotok a fenntarthatóságért] Fenntartható turizmus Ez a dokumentum a World Robot Olympiad magyarországi
Mystery Express. magyar nyelvő, kép nélküli szabályösszefoglaló készítette: Raud
 1 Mystery Express magyar nyelvő, kép nélküli szabályösszefoglaló készítette: Raud Utolsó balszerencsés kalandodat követıen pihenésre vágysz, és úgy határozol, a legendás Orient Express extravagáns luxuskörnyezetével
1 Mystery Express magyar nyelvő, kép nélküli szabályösszefoglaló készítette: Raud Utolsó balszerencsés kalandodat követıen pihenésre vágysz, és úgy határozol, a legendás Orient Express extravagáns luxuskörnyezetével
Sport XXI. Egyéni Verseny - Gyakorlatanyag
 Sport XXI. Egyéni Verseny - Gyakorlatanyag SPRINT ÖSSZETETT Sprint összetett (ügyességi pálya,+ 40m guggoló támaszból) U11: 1m 2,5m 3m 5m 6m 5,5m 7m 10m Pálya kialakítása: pálya hossza 2pályax40m. A versenyző
Sport XXI. Egyéni Verseny - Gyakorlatanyag SPRINT ÖSSZETETT Sprint összetett (ügyességi pálya,+ 40m guggoló támaszból) U11: 1m 2,5m 3m 5m 6m 5,5m 7m 10m Pálya kialakítása: pálya hossza 2pályax40m. A versenyző
Számlázó program kezelési leírása
 Számlázó program kezelési leírása 1. Program telepítése: A letöltött számla.exe futtatása. Ajánlott a nem rendszer partícióra telepíteni, mivel új installáláskor ebben az esetben nem vesznek el a számlák.
Számlázó program kezelési leírása 1. Program telepítése: A letöltött számla.exe futtatása. Ajánlott a nem rendszer partícióra telepíteni, mivel új installáláskor ebben az esetben nem vesznek el a számlák.
ASTER motorok. Felszerelési és használati utasítás
 1. oldal ASTER motorok Felszerelési és használati utasítás A leírás fontossági és bonyolultsági sorrendben tartalmazza a készülékre vonatkozó elméleti és gyakorlati ismereteket. A gyakorlati lépések képpel
1. oldal ASTER motorok Felszerelési és használati utasítás A leírás fontossági és bonyolultsági sorrendben tartalmazza a készülékre vonatkozó elméleti és gyakorlati ismereteket. A gyakorlati lépések képpel
A Sport XXI. Alapprogram teremverseny Közép-Magyarország régió január 21., Gödöllő, SZIE Sportcsarnok
 A Sport XXI. Alapprogram teremverseny Közép-Magyarország régió 2018. január 21., Gödöllő, SZIE Sportcsarnok 1. A verseny célja Regionális szinten, egész éven keresztül tartó motivációt és versenylehetőséget
A Sport XXI. Alapprogram teremverseny Közép-Magyarország régió 2018. január 21., Gödöllő, SZIE Sportcsarnok 1. A verseny célja Regionális szinten, egész éven keresztül tartó motivációt és versenylehetőséget
Sport XXI. Atlétikai alapprogram
 Sport XXI. Atlétikai alapprogram Alföldi Régió, Terem 2 gyerekversenye Kecskemét 2017. december 15. 14,00 óra Lánchíd Utcai Sport Általános Iskola Sportcsarnoka 1. A verseny célja: Versenylehetőség biztosítása
Sport XXI. Atlétikai alapprogram Alföldi Régió, Terem 2 gyerekversenye Kecskemét 2017. december 15. 14,00 óra Lánchíd Utcai Sport Általános Iskola Sportcsarnoka 1. A verseny célja: Versenylehetőség biztosítása
Kezelési utasítás. Easytronic Version 2.2. Solitair 8. LEMKEN GmbH & Co. KG
 Kezelési utasítás Elektronikus vetıgép-vezérlés Easytronic Version 2.2 Solitair 8 - HU - Biztosítjuk biztonságát! LEMKEN GmbH & Co. KG Weseler Straße 5, D-46519 Alpen / Postfach 11 60, D-46515 Alpen Telefon
Kezelési utasítás Elektronikus vetıgép-vezérlés Easytronic Version 2.2 Solitair 8 - HU - Biztosítjuk biztonságát! LEMKEN GmbH & Co. KG Weseler Straße 5, D-46519 Alpen / Postfach 11 60, D-46515 Alpen Telefon
Dinnyeválogató v2.0. Típus: Dinnyeválogató v2.0 Program: Dinnye2 Gyártási év: 2011 Sorozatszám: 001-1-
 Dinnyeválogató v2.0 Típus: Dinnyeválogató v2.0 Program: Dinnye2 Gyártási év: 2011 Sorozatszám: 001-1- Omron K3HB-VLC elektronika illesztése mérlegcellához I. A HBM PW10A/50 mérlegcella csatlakoztatása
Dinnyeválogató v2.0 Típus: Dinnyeválogató v2.0 Program: Dinnye2 Gyártási év: 2011 Sorozatszám: 001-1- Omron K3HB-VLC elektronika illesztése mérlegcellához I. A HBM PW10A/50 mérlegcella csatlakoztatása
Tevékenység: Követelmények:
 3.1. Szíjhajtások Tevékenység: Olvassa el a jegyzet 146-162 oldalain található tananyagát! Tanulmányozza át a segédlet 10. és 10.1. fejezeteiben lévı kidolgozott feladatait! A tananyag tanulmányozása közben
3.1. Szíjhajtások Tevékenység: Olvassa el a jegyzet 146-162 oldalain található tananyagát! Tanulmányozza át a segédlet 10. és 10.1. fejezeteiben lévı kidolgozott feladatait! A tananyag tanulmányozása közben
TARTALOM ÉS A JÁTÉK: I. VERSENYPÁLYA VÁLASZTÁSA II. ELİKÉSZÍTÉS ÉS KEZDİ POZÍCIÓ. 3 ef
 1 ef ÓKORI RÓMAI LÁTVÁNYOSSÁG HARCI SZEKEREK VAKMERİ VERSENYE A HÍRNÉVÉRT ÉS A DICSİSÉGÉRT Kiadó: Pro Ludo Szerzı: Wolfgang Riedesser Illusztráció: Eckhard Freytag Grafikai:: Ingrid Berner Egy vakmerı
1 ef ÓKORI RÓMAI LÁTVÁNYOSSÁG HARCI SZEKEREK VAKMERİ VERSENYE A HÍRNÉVÉRT ÉS A DICSİSÉGÉRT Kiadó: Pro Ludo Szerzı: Wolfgang Riedesser Illusztráció: Eckhard Freytag Grafikai:: Ingrid Berner Egy vakmerı
TANTÁRGY ADATLAP és tantárgykövetelmények Cím: Épületszerkezettan I.
 TANTÁRGY ADATLAP és tantárgykövetelmények Cím: Épületszerkezettan I. Tárgykód: PMRESNE037B, PMRESNE037P Heti óraszám: 3/4/0, Kreditpont: 7 Szak(ok)/ típus: Tagozat: Követelmény: Meghirdetés féléve: Nyelve:
TANTÁRGY ADATLAP és tantárgykövetelmények Cím: Épületszerkezettan I. Tárgykód: PMRESNE037B, PMRESNE037P Heti óraszám: 3/4/0, Kreditpont: 7 Szak(ok)/ típus: Tagozat: Követelmény: Meghirdetés féléve: Nyelve:
VERSENYKIÍRÁS MNASZ RALLYCROSS ORSZÁGOS BAJNOKI FUTAM NYIRÁDI MOTORSPORT CENTRUM, NYIRÁD 2009. JÚLIUS 18-19. (RÖVIDÍTETT VÁLTOZAT)
") VERSENYKIÍRÁS MNASZ RALLYCROSS ORSZÁGOS BAJNOKI FUTAM NYIRÁDI MOTORSPORT CENTRUM, NYIRÁD 2009. JÚLIUS 18-19. (RÖVIDÍTETT VÁLTOZAT) Ez a Rövidített Változat a jelenleg érvényes MNASZ Rallycross Országos
VERSENYKIÍRÁS MNASZ RALLYCROSS ORSZÁGOS BAJNOKI FUTAM NYIRÁDI MOTORSPORT CENTRUM, NYIRÁD 2009. JÚLIUS 18-19. (RÖVIDÍTETT VÁLTOZAT) Ez a Rövidített Változat a jelenleg érvényes MNASZ Rallycross Országos
ÜZEMBEHELYEZİI LEÍRÁS Figyelem! A konfigurációs mód eltér a 433MHz-es verziótól!
 Rev.1T10MM ÜZEMBEHELYEZİI LEÍRÁS Figyelem! A konfigurációs mód eltér a 433MHz-es verziótól! Ez a kültéri, vezeték nélküli passzív infravörös mikrohullámú mozgásérzékelı bármilyen riasztóközponthoz illeszthetı,
Rev.1T10MM ÜZEMBEHELYEZİI LEÍRÁS Figyelem! A konfigurációs mód eltér a 433MHz-es verziótól! Ez a kültéri, vezeték nélküli passzív infravörös mikrohullámú mozgásérzékelı bármilyen riasztóközponthoz illeszthetı,
Iktató szám: 88 / 2013. Tárgy: KHESZ Versenykiírás 2013.
 Körösvidéki Horgász Egyesületek Szövetsége 5 6 0 0 B é k é s c s a b a, B a j z a u t c a 1 1. T e l. : 6 6 / 3 2 8-9 4 5 ; f a x : 6 6 / 3 2 3-5 1 2 M a i l : k h e s z @ m a i l. g l o b o n e t. h u
Körösvidéki Horgász Egyesületek Szövetsége 5 6 0 0 B é k é s c s a b a, B a j z a u t c a 1 1. T e l. : 6 6 / 3 2 8-9 4 5 ; f a x : 6 6 / 3 2 3-5 1 2 M a i l : k h e s z @ m a i l. g l o b o n e t. h u
Melléklet az 1/2003. (I. 9.) BM rendelethez
 BM rendelethez") A jogszabály 2010. április 2. napon hatályos állapota 1/2003. (I. 9.) BM rendelet a tőzoltóság tőzoltási és mőszaki mentési tevékenységének szabályairól A tőz elleni védekezésrıl, a mőszaki mentésrıl és
A jogszabály 2010. április 2. napon hatályos állapota 1/2003. (I. 9.) BM rendelet a tőzoltóság tőzoltási és mőszaki mentési tevékenységének szabályairól A tőz elleni védekezésrıl, a mőszaki mentésrıl és
World Robot Olympiad2019. Regular Kategória Senior Korosztály SMART CITIES OKOS VÁROSOK OKOSHÁLÓZAT. Verzió: December 11.
 World Robot Olympiad2019 Regular Kategória Senior Korosztály SMART CITIES OKOS VÁROSOK OKOSHÁLÓZAT Verzió: December 11. WRO Nemzetközi Prémium Partnerek Tartalomjegyzék 1. Bevezetés... 2 2. Az asztal specifikációi...
World Robot Olympiad2019 Regular Kategória Senior Korosztály SMART CITIES OKOS VÁROSOK OKOSHÁLÓZAT Verzió: December 11. WRO Nemzetközi Prémium Partnerek Tartalomjegyzék 1. Bevezetés... 2 2. Az asztal specifikációi...
Ellenıri jelentés kitöltési útmutató Játékvezetı ellenır és megyei adminisztrátorok számára
 Ellenıri jelentés kitöltési útmutató Játékvezetı ellenır és megyei adminisztrátorok számára Használati útmutató az MLSZ ügyviteli rendszeréhez (2009. július 20- állapot) Készítette: Czett Szabolcs 2009.07.20-i
Ellenıri jelentés kitöltési útmutató Játékvezetı ellenır és megyei adminisztrátorok számára Használati útmutató az MLSZ ügyviteli rendszeréhez (2009. július 20- állapot) Készítette: Czett Szabolcs 2009.07.20-i
A DocuBase önkormányzati programrendszer
 A DocuBase önkormányzati programrendszer RÖVID ISMERTETİ Milyen céllal készült a DocuBase? A DocuBase az önkormányzat testületének, illetve bizottságainak munkájához szükséges dokumentumokat nyilvántartó,
A DocuBase önkormányzati programrendszer RÖVID ISMERTETİ Milyen céllal készült a DocuBase? A DocuBase az önkormányzat testületének, illetve bizottságainak munkájához szükséges dokumentumokat nyilvántartó,
Felhívás II. Baranya Open
 Felhívás II. Baranya Open A Pécsi Tudományegyetem Pollack Mihály Műszaki és Informatikai Kar és a Pollino Team Hungary II. Baranya Open" elnevezéssel csapatversenyt hirdet a robottechnika iránt érdeklődő
Felhívás II. Baranya Open A Pécsi Tudományegyetem Pollack Mihály Műszaki és Informatikai Kar és a Pollino Team Hungary II. Baranya Open" elnevezéssel csapatversenyt hirdet a robottechnika iránt érdeklődő
Versenyző kódja: 38 27/2012. (VIII. 27.) NGM rendelet MAGYAR KERESKEDELMI ÉS IPARKAMARA. Országos Szakmai Tanulmányi Verseny.
 NGM rendelet MAGYAR KERESKEDELMI ÉS IPARKAMARA. Országos Szakmai Tanulmányi Verseny.") 54 523 04-2015 MAGYAR KERESKEDELMI ÉS IPARKAMARA Országos Szakmai Tanulmányi Verseny Elődöntő ÍRÁSBELI FELADAT Szakképesítés: 54 523 04 SZVK rendelet száma: 27/2012. (VIII. 27.) NGM rendelet : Mechatronikai
54 523 04-2015 MAGYAR KERESKEDELMI ÉS IPARKAMARA Országos Szakmai Tanulmányi Verseny Elődöntő ÍRÁSBELI FELADAT Szakképesítés: 54 523 04 SZVK rendelet száma: 27/2012. (VIII. 27.) NGM rendelet : Mechatronikai
Legnagyobb anyagterjedelem feltétele
 Legnagyobb anyagterjedelem feltétele 1. Legnagyobb anyagterjedelem feltétele A legnagyobb anyagterjedelem feltétele (szabványban ilyen néven szerepel) vagy más néven a legnagyobb anyagterjedelem elve illesztett
Legnagyobb anyagterjedelem feltétele 1. Legnagyobb anyagterjedelem feltétele A legnagyobb anyagterjedelem feltétele (szabványban ilyen néven szerepel) vagy más néven a legnagyobb anyagterjedelem elve illesztett