Babes-Bolyai Tudományegyetem Matematika-Informatika Kar
|
|
|
- Gyöngyi Fehérné
- 8 évvel ezelőtt
- Látták:
Átírás
1 Babes-Bolyai Tudományegyetem Matematika-Informatika Kar Tárgykövető robot Máté István-Zoltán Vezetőtanárok : Soós Anna, Csató Lehel Kolozsvár 2006

2 1.1. Bevezető: A projekt célja egy számítógép irányítású, két léptetőmotorbol álló, gömkordinátában mozgó, kamerával felszerelt robot készítése, amely képes bizonyos tulajdonságú tárgyak követésére, egy kamera mozgatásával. A léptőmotrok a párhuzamos porton(parallel Port) keresztül kommunikálnak a számítógéppel, a kamera pedig az USB (Universal Serial Bus) porton keresztül. A tárgy felismerése szín alapján RGB (Red Green Blue) színmezőben történik. A tárgy felísmerése különböző módszerek segítségével, színsűrüség, illetve színhisztogram segítségével történik. A tárgy követése kanonikus, illetve Kalman filterrel valósul meg. A program implementálása Microsoft Visual Studio.Net 2003 alatt történt, C# programozási nyelvben Az eszközök leírása: Az alábbiakban azok az eszközök(hardware)kerülnek leírásra amelyekből felépül a robot, valamint a robot használ A párhuzamos port A számítástechnikában a párhuzamos portot(parallel Port) interfésznek tekintik a számítógépes rendszer, ahol az a adatok párhuzamosan vannak közvetítve a különböző egységek közt, és egy külső hardware egység(nyomtató, egér) közt. A párhuzamos port egy bit-et (Bit), közvetít minden egyes szálon(pin) egy időegység alatt, és nem többet egy adott időegységen belül, mint például a soros port(serial Port). A porton az adatátviteli bitteken kívül található pár jelzőbit, amelyek célja jelezni, hogy az eszköz mikor áll készen a müködtetésre, legyen az a hardware eszköz, vagy maga a számítógép. Manapság az USB(Universal Serial Bus) felváltotta, a párhuzamos port használatát, és sok ma gyártott számítógépen (2006) már mellőzik a párhuzamos portot, pénzsporlás céljából, és azért mert használata elavultnak tekintett. A soros port müködtetése hasznosabbnak bizonyult kissebb mérete miatt, és nagyobb adatátvili képességei miatt A léptetőmotrtok: A léptetőmotor ahogy neve is mondja, egy olyan motor amely egy bizonyos lépésszöggel képes fordulni jobb, illetve bal irányba. A léptetőmotor abban különbözik a hagyományos motortól, hogy ez kis lépésekben képes fordulni, mig egy hagyományos motor fordulatait percenként mérik (fordulat/perc), 2

3 nem képes apró lépésekre. A léptetőmotrok TEAC típusu 5.25 lemezmeghajóból (Floppy Drive) származó motrok. A motrok 12Val (Volt) működnek. A motrok vezérlésével egy interfész foglalkozik, amely a párhuzamos portról érkező jelt átkapcsolja 12V-os feszültségre a motrok működtetésére. A motrok vezérlése egy 5 szálas kábelen keresztül történik, amelyből 1 földelés, és a többi 4 lehetővé teszi a motor bizonyos irányba való elmozdulását Az interfész: Az interfész egy olyan elektrónikus szerkezet, amely a párhuzamos portról érkező jelt a motrok mozgatására alkalmas jellé alakítja. Az interfész alapjában véve kapcsolóként müködik, amely a párhuzamos porton érkező 3.8 V-os feszültséget 12V-ra kapcsolja át. Felépítesében motronként 4 tranzisztor, 4 ellenállás, és 4 dióda szerepel. Az ellenállás szabályozza a tranzisztorhoz érkező feszültséget, a tranzisztor a párhuzamos portról érkező feszültségkor nyit, és a 12V-os feszültséget átadja a motornak A kamera: A projektben használt kamera, USB portra csatlakozó, Logitech Quickcam Express. A kamera 352x288 pixeles (Pixel: színkomponens alapaegysége a számítógép képernyőjén), felbontásban képes képeket közvetíteni, és 15 fps (Frame Per Second) a frissítése videó felvétel készítésekor. Egy lényeges probléma a kamerával, hogy mivel kis felbontású képet közvetít, és egy olcsó kameratípus teljesítménye nagyon függ a fényviszonyoktól. Nappali fény használatakor az érkezett kép jó minőségű, viszont gyenge fényviszonyok esetén a képen nagy lesz a zaj, ez gyakorlatilag abban nyilvánul meg, hogy a kép bolházik A robot A robot motrai úgy vannak elhelyezve, hogy lehetövé tegyék a kamera gömbkoordinátában való mozgását. Az első motor a rotorjával (Rotor a motorban mozgó vasmag) merőlegesen van elhelyezve a föld síkjára, a második motor viszont ennek a rotorjára van merőlegesen elhelyezve, és ennek a rotorján található a kamera. 3

4 1.3. A tárgy meghatározása Bevezető: A tárgyak meghatározása a mesterséges intelligencia témakörében a 60- as évektől kezdődöen jelentett problémát, amikor a számítógépek fejlődése lehetővé tette az effajta kérdések felvetődését, de egésszen a 80-as évekig nem lehetett komolyan foglalkozni evvel a témával, mert a számítógépek nem tették lehetővé a képfeldolgozást. A tárgyak felismerése, és követése a 90- es évektől kezdődöen kihívást jelentett, viszont a hétköznapi számítógépeken történő követés nem volt lehetséges, bár a tárgyfelismerés már lehetséges volt statikus képek esetén. A valós időben történő feldolgozás nehézségei miatt, ami elsősorban a nagy mennyiségű adatfeldolgozást jelentett valós időben, sokáig nem volt lehetséges evvel a témakörrel foglalkozni. Különálló hardware egységek létrehozásával már lehetett számítógépes tárgykövetést megvalósítani a 80-as évektől, de ez általában csak a nagy cégek, és vállalatok esetében volt lehetséges, mivel egy hardware egység létrehozása rengeteg pénzt és mérnöki munkát igényel. Az első tárgykövetési alkalmazások az amerikai katonaságtól származnak, tárgykövető rakéták alkalmazásaiban fordultak elő a 80-as évek közepétől. A számítógépek egyre nagyobb ütemben való fejlődese lehetővé tette, hogy lehetséges legyen a tárgykövetés hétköznapi felhasználóknak is. Tárgyfelismerés terén rengeteg algoritmus létezik, egy részük a tárgy alakján alapuló tárgyfelismerést alkalmaz. Ez a módszer hátránya a nagy számítási adat feldolgozása, es az algoritmusok nagy szamítasi igényei, ami az alkalmazás lelassulásához vezet. Ezeket a módszereket általában több számítógépes rendszereken alkalmazzák valós időben való követésre, így érik el a megfelelő teljesítményt. Ezek a módszerek előnye, hogy a tárgyat egyértelmüen meghatározzák. Ezt a módszert általában fekete-fehér kamerák esetében alkalmazzák, mert kevessebb számítást kell végezni a tárgy meghatározásához, és mivel nem lehet másképp egyértelmüen meghatározni a tárgyakat fekete-fehér színmezőben. Egy másik módszer, amelyet színes kamerás alkalmazások esetében használnak szìnsűruségen alapuló módszerek, de ezen kívül rengeteg más típusú algoritmus van. Az általam alkalmazott módszer alapja a tárgy színhisztogramjának elkészítése Színhistogram alapú tárgyfelismerés A számítógépes színábrázolás alapegysége a pixel. Egy pixel három komponensből áll: R G B (Red, Green, Blue), azaz piros, zöld, kék. A számítógép képernyőjén megjelenő képek ez a három szín keverésébol állnak elő. Az RGB színmező komponenseinek terjedelme van, egy szín értéke minnél 4

5 inkább tart a 0-hoz, anál inkább sötétebb, tehát a fekete szín R=0, G=0, B=0, és a fehér R=255, G=255, B=255. A Logitech Quickam Express kameráról a képek RGB felépítésben, 24 bittes színábrázolásban érkeznek. A hisztogram alapú targyfelismerés lényege, hogy az adott térrészben található pixeleknek figyeli a gyakoriságát színkomponensenként A tárgy megadása, és a hisztogram előkészítése: A színskálát felosztjuk k egyenlő részre. xr i = [0..x i ], x i = /i, i = 0..k xg i = [0..x i ], x i = /i, i = 0..k xb i = [0..x i ], x i = /i, i = 0..k A tárgy megadása egy téglalapban történik. Ebből a téglalapból kiindúlva a program végigfutja minden sorát, és menézi, hogy az adott szín melyik intervallumba tartozik, és növeli az adott intervallumhoz tartozó, értéket, amely az előfordulást figyeli. Lekérdezzül az aktuális pixel értékét, és meghatározzuk ColorR, ColorG,ColorB-t. X l, X r az aktuális tárgy x koordinátái, Y l, Y r pedig az y koordinátái. x i a tárgy aktuális x koordinátája, ahol i [X l..x r ] y i a tárgy aktuális y koordinátája, ahol j [Y l..y r ] Color = Color(x i,y i ) Color R az aktuális szín R komponense Color G az aktuális szín G komponense Color B az aktuális szín B komponense Ha Color R xr i akkor elofordulr[i] = elofordulr[i]+1 Ha Color G xg i akkor elofordulg[i] = elofordulg[i]+1 Ha Color B xb i akkor elofordulb[i] = elofordulb[i]+1 Ezt az eljárást végigfuttatjuk minden (x i,y i ) -re. Az így megkapott elofordulr, elofordulg, elofordulb fogják megadni az adott tárgy hisztogramját. A programban a megkapott értékeket nem hisztogramként ábrázoljuk, hanem gyakorisági görbeként. 5

6 1.1. ábra. A gyakorisagi görbék A piros görbe a tárgy piros színkomponensének a gyakorisági görbéje, a zöld görbe a zöld komponens görbéje, és a kék a kék komponens gyakorisági görbéje. A hisztogram készítése a piros téglalapban történik Hibaforrások: Elsődleges hibaforrás a fényviszonyok változása, például egy árnyék rávetülése a képre, ekkor a tárgy hisztogramja olyan módosulásokat szenved, amelyek nem garantálják a tárgy optimális felismerését. Ennek kiküszöbölését úgy próbáljuk, hogy a lehetséges tárgytalálatot nem a hisztogrammal való tökéletes egyezés esetén adjuk meg, hanem a lehetséges tárgytalálatok minimumával. A minimum számolása az eredeti tárgy hisztogramjához képest történik. Mivel a hisztogram meghatározása O(n 2 ) bonyolultságú, tehát implementáláskor két for (Amíg) ciklust tartalmaz, végrehajtásuk rendkívül időigényes. Emiatt relatív kis téglalapban végezhető el a hisztogram meghatározás, és a követés. Egy 352x288 pixeles kép teljes befutásához műveletet kell elvégeznie a számítógépnek, viszont nincs hozzászámolva, hogy ezek a számítások mögött hány számítást végez el ténylegesen a program és az operációs rendszer, tehát ez csak egy relatív értéket jelől. 6

7 1.4. A tárgy követése, és lehetséges poziciójának meghatározása Egy mozgást végző tárgy lehetséges poziciójának meghatározására alkalmas egyszerű és jól müködő módszer a Kalman szűrés (Kalman Filter). A projektben ez a tárgykövetési módszer van alkalmazva. Ez a módszer csak egy bizonyos valószínűséggel adja meg a tárgy helyzetét, ezt, és a hasonló módszereket jós módszereknek nevezik (prediction), mivel gyakorlatilag megjósolják a tárgy következő időpillanatbeli a helyzetét. Ezeknek a módszereknek az előnye, hogy egy lineáris egyenlet megoldásával relatív gyorsan meg lehet adni a tárgy helyzetét A Kalman szűrő leírása: Bevezető: A szűrő neve a szűrő feltalálójától származik, vagyis Rudolf E. Kalmantól, bár Peter Swerling kidolgozott már egy hasonló szűrőt korábban. Stanley Schmidtet ismerjük mint az első ember aki alkalmazta a Kalman szűrőt. Ez 1958-ban történt amikor Stanley lehetőséget kapott arra, hogy az Apollo programon belül alkalmazást nyerjen. A szűrő papíron Swerling által volt kifejlesztve(1958), majd Kalman által (1960), és Kalman és Bucy által (1961). A Kalman szűrőnek egy nagy sokaságát fejlesztették ki napjainkig, az eredeti Kalman szűrőbúl, amelyet ma egyszerű Kalman szűrőnek hívunk. Manapság a Kalman szűrőt használják a távközlésben, és gyakorlatilag minden bonyolultabb elektronikai eszközben A Kalman szűrő müködése A Kalman szűrő becslést próbál adni egy tárgy következő helyzetéről egy t+n időpillanatban, ha a t + (n 1). időpillanatban ismert a poziciója. Ahogy az ábrán is látható, az (x t, y t ) helyzetből a tárgy ( x t+1,y t+1 ) helyzetbe mozdul el 1 időpillanat alatt. A Kalman szűrő lényege, hogy becslést ad a következő pillanbeli pozicióra, és amennyiben a tárgy lineáris mozgást végez akkor az (x t+1 x t, y t+1 y t ) vektor által megadott irányba fog elmozdulni, amint az alábbi ábrán látható. Az egyszerű Kalman szűrő tehát egy lineáris becslést ad a tárgy t + n. időpillanatbeli helyzetéről. 7

8 1.2. ábra. A Kalman szűrő müködése 8

9 x t+n a tárgy x koordinátája a t + n. időpillanatban. y t+n a tárgy y koordinátája a t + n. időpillanatban. v n a tárgy sebessége a t + n. időpillanatban. a n) a tárgy gyorsulása a t + n. időpillanatban A Kalman szűrő tehát egy rekurzív algoritmus, ami lineáris becslést ad a tárgy poziciójáról egy t + n. időpillanatban, ismerve a tárgy pozicióját a t. időpillanatban. Ekkor a mozgásegyenlet: x (n+1) T = x n T + T v n T + T2 2 a n T Mivel ha T,a két időpillanat közti különbség, abban az esetben, ha elég kicsi, tehát nagyon rövid időközönként figyeljük a tárgy mozgását, akkor a T v n T + T2 2 a n T összeg nullának tekínthető. Tehát: x k+1 y k+1 dx k+1 dy k+1 = ahol w k a tárgy pályájának korrekciója x k y k dx k dy k + w k A Kalman szűrő által meghatározott pálya korrekciója Mivel a Kalman szűrő nem adja meg taljes pontossággal a tárgy pályáját, szükség van egy korrekcióra. Ezt a korrekciót pedig úgy lehet elvégezni, ha a meghatározott pálya egy környezetében vizsgáljuk a tárgyat. A tárgy vizsgálata bizonyos szűrő segítségével történik, jelen esetben a színhisztogram segítségével. A fenti ábrán látható piros téglalap adja meg a tárgy aktuális pozicióját, amit a Kalman szűrő határozott meg, a fehér téglalap pedig megadja a korrekciót, amit a piros téglalap környezetében találtunk. A téglalap környezetében a keresést a zöld egymásraépülő téglalapok adják, ezek közül történik a minimum meghatározás. A pálya korrekciója biztosítja azt, hogy a Kalman szűrő ne szaladjon el egy bizonyos irányba, és stabilizálja azt, biztosítva a program 9
 T = x n T + T v n T + T2 2 a n T Mivel ha T,a két időpillanat közti különbség, abban az esetben, ha elég kicsi, tehát nagyon rövid időközönként figyeljük a tárgy")
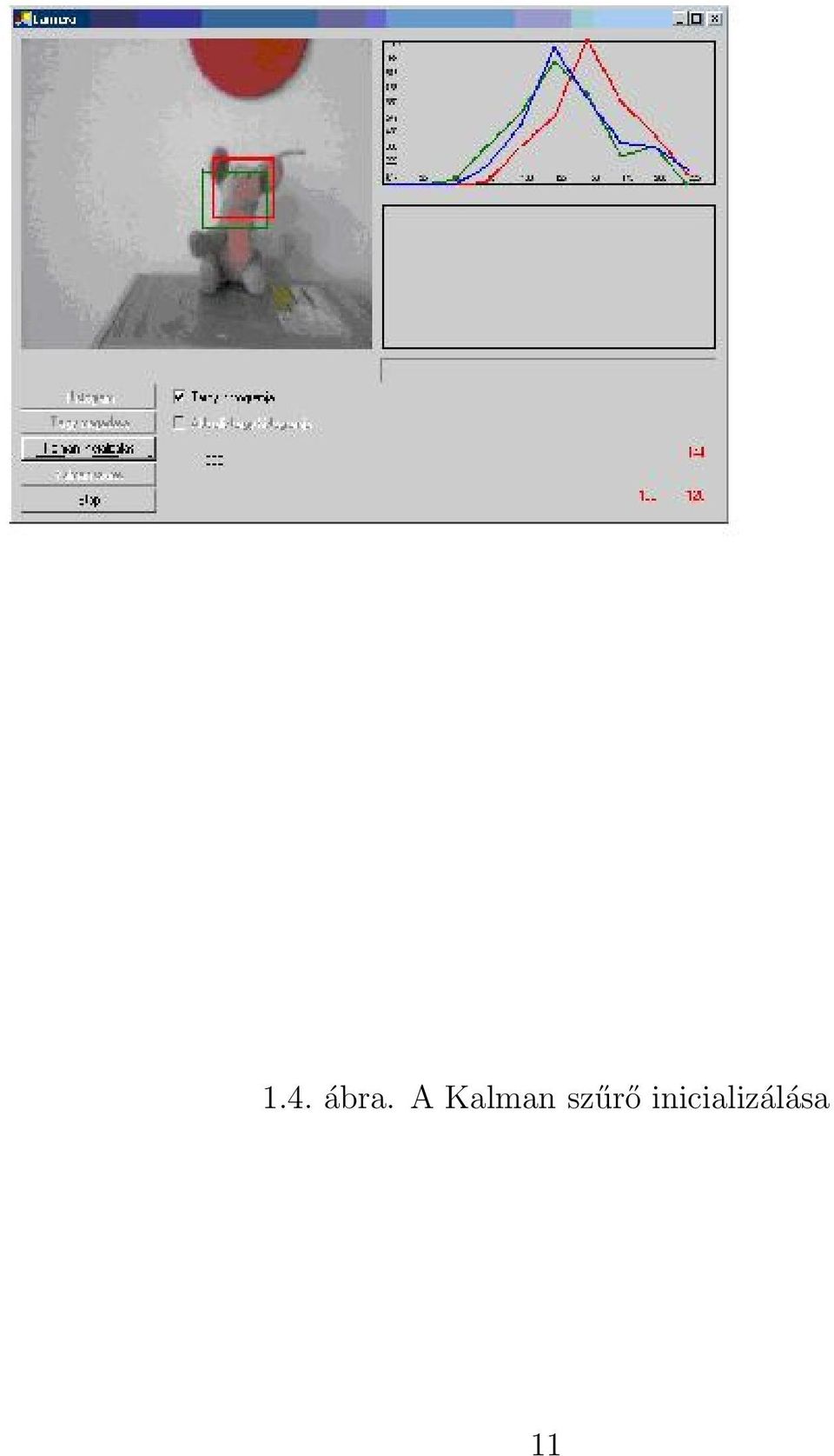
10 1.3. ábra. Pálya korrekciója optimális müködését A Kalman szűrő inicializálása: A Kalman szűrőt inicializálni kell, mivel a szűrő a tárgy időbeli helyzetével dolgozik, kezdetben t = 0,és nem ismert a tárgy poziciója. Kezdeti pillanatban a x k egyenlő lesz a tárgy kezdeti poziciójával, a következő számítási pillanatra pedig, meg kell adjunk egy irányt, amelyre vélhetően a tárgy el fog mozdulni. A képen látható piros téglalap megadja a tárgy kezdeti pozicióját, a zöld téglalap pedig azt a poziciót, amelybe vélhetőleg el fog mozdulni. Ezek után a Kalman szűrő kiszámolja az elmozdulásokat mindkét irányban: dx t -t, illetve dy t -t. A továbbiakban a Kalman szűrú valamit a korrekció biztosítja a tárgy következő pillanatbeli helyzetét Megjegyzések a robot képességéről és problémáiról Amint a fentiekből láthatjuk a robot müködtetésére két erős módszert használunk, a színhisztogram meghatározást, valamint a Kalman szűrőt. A robot általában problémák nélkül meghatározza a tárgyat, viszont érzékeny a fényviszonyok változására, mint például, árnyék esik az adott tárgyra, fényvisszaverés a tárgyról, ami hirtelen megváltoztatja a keresési körülményeket, ezért a tárgy megtalálása nem biztosított, viszont egy elég jó becslés nyerhető 10

11 1.4. ábra. A Kalman szűrő inicializálása 11
12 annak poziciójának a meghatározásáról. Másrészt problémák akkor következnek be, amikor a tárgy kilép az adott képből, tehát a motrok mozgatásával kell keresnünk azt. A motor egy lépésben relatív kicsit lép, ez az érték körülbelül 50 pixeles értéknek felel meg, ha ebben a pillanatban gyorsan mozog a tárgy, akkor könnyen elvesztheti a fókuszt, illetve ha túl lassan mozog, akkor az aktualis poziciónál kissebbet határoz meg. Mivel színhisztogramos felísmerést végzünk, nem kereshhetünk teljes 352x288-as képen, hanem csak a tárgy egy környezetében. Ha ezt a környezetet nagyon kiterjesztjük, akkor lassul a program, ennek eredményeként a képfeldolgozás, a tárgy megint eltűnhet, annélkül, hogy követni tudnánk. Tehát nehéz pontosan meghatározni azt a sebességet amellyel mozgatni kellene a tárgyat képváltáskor, illetve a számítógép túlterhelése miatt. Amennyiben a számítógép nagyobb teljesítményű számításelvégzésre lenne képes, úgy jobb lenne a tárgymeghatározás is. 12

13 1.7. Könyvészet 1. Real-Time Kernel-Based Tracking in Joint Feature-Spatial Spaces - Changjiang Yang, Ramani Duraiswami, Ahmed Elgammal and Larry Davis cs-tr.pdf 2. Object Tracking and Kalman Filtering - Hai Tao lec15.pdf 3. Kalman filter for vision tracking - Erik Cuevas, Daniel Zaldivar and Raul Rojas tr-b-05.pdf 4. Bayesian Filtering and Integral Image for Visual Tracking - Bohyung Han Changjiang, Yang Ramani Duraiswami, Larry Davis wiamis2005.pdf 5. Object Recognition with Color Cooccurrence Histograms - Peng Chang,John Krumm - Microsoft Research ColorConcurrenceCVPR.pdf 13

Tárgykövető robot. Kolozsvár BABES-BOLYAI TUDOMÁNYEGYETEM MATEMATIKA-INFORMATIKA KAR INFORMATIKA MODELLEK OPTIMIZÁLÁSA- MESTERI
 BABES-BOLYAI TUDOMÁNYEGYETEM MATEMATIKA-INFORMATIKA KAR INFORMATIKA MODELLEK OPTIMIZÁLÁSA- MESTERI Tárgykövető robot IX. Erdélyi Tudományos Diákköri Konferencia - Kolozsvár, 2006. november 25-26 Tudományos
BABES-BOLYAI TUDOMÁNYEGYETEM MATEMATIKA-INFORMATIKA KAR INFORMATIKA MODELLEK OPTIMIZÁLÁSA- MESTERI Tárgykövető robot IX. Erdélyi Tudományos Diákköri Konferencia - Kolozsvár, 2006. november 25-26 Tudományos
NGB_IN040_1 SZIMULÁCIÓS TECHNIKÁK dr. Pozna Claudio Radu, Horváth Ernő
 SZÉCHENYI ISTVÁN EGYETEM Műszaki Tudományi Kar Informatika Tanszék BSC FOKOZATÚ MÉRNÖK INFORMATIKUS SZAK NGB_IN040_1 SZIMULÁCIÓS TECHNIKÁK dr. Pozna Claudio Radu, Horváth Ernő Fejlesztői dokumentáció GROUP#6
SZÉCHENYI ISTVÁN EGYETEM Műszaki Tudományi Kar Informatika Tanszék BSC FOKOZATÚ MÉRNÖK INFORMATIKUS SZAK NGB_IN040_1 SZIMULÁCIÓS TECHNIKÁK dr. Pozna Claudio Radu, Horváth Ernő Fejlesztői dokumentáció GROUP#6
SZENZORFÚZIÓS ELJÁRÁSOK KIDOLGOZÁSA AUTONÓM JÁRMŰVEK PÁLYAKÖVETÉSÉRE ÉS IRÁNYÍTÁSÁRA
 infokommunikációs technológiák SZENZORFÚZIÓS ELJÁRÁSOK KIDOLGOZÁSA AUTONÓM JÁRMŰVEK PÁLYAKÖVETÉSÉRE ÉS IRÁNYÍTÁSÁRA BEVEZETŐ A KUTATÁS CÉLJA Autonóm járművek és robotok esetén elsődleges feladat a robotok
infokommunikációs technológiák SZENZORFÚZIÓS ELJÁRÁSOK KIDOLGOZÁSA AUTONÓM JÁRMŰVEK PÁLYAKÖVETÉSÉRE ÉS IRÁNYÍTÁSÁRA BEVEZETŐ A KUTATÁS CÉLJA Autonóm járművek és robotok esetén elsődleges feladat a robotok
Kinematika szeptember Vonatkoztatási rendszerek, koordinátarendszerek
 Kinematika 2014. szeptember 28. 1. Vonatkoztatási rendszerek, koordinátarendszerek 1.1. Vonatkoztatási rendszerek A test mozgásának leírása kezdetén ki kell választani azt a viszonyítási rendszert, amelyből
Kinematika 2014. szeptember 28. 1. Vonatkoztatási rendszerek, koordinátarendszerek 1.1. Vonatkoztatási rendszerek A test mozgásának leírása kezdetén ki kell választani azt a viszonyítási rendszert, amelyből
Mérési hibák 2006.10.04. 1
 Mérési hibák 2006.10.04. 1 Mérés jel- és rendszerelméleti modellje Mérési hibák_labor/2 Mérési hibák mérési hiba: a meghatározandó értékre a mérés során kapott eredmény és ideális értéke közötti különbség
Mérési hibák 2006.10.04. 1 Mérés jel- és rendszerelméleti modellje Mérési hibák_labor/2 Mérési hibák mérési hiba: a meghatározandó értékre a mérés során kapott eredmény és ideális értéke közötti különbség
Képszerkesztés elméleti kérdések
 Képszerkesztés elméleti kérdések 1. A... egyedi alkotó elemek, amelyek együttesen formálnak egy képet.(pixelek) a. Pixelek b. Paletták c. Grafikák d. Gammák 2. Az alábbiak közül melyik nem színmodell?
Képszerkesztés elméleti kérdések 1. A... egyedi alkotó elemek, amelyek együttesen formálnak egy képet.(pixelek) a. Pixelek b. Paletták c. Grafikák d. Gammák 2. Az alábbiak közül melyik nem színmodell?
Roger UT-2. Kommunikációs interfész V3.0
 ROGER UT-2 1 Roger UT-2 Kommunikációs interfész V3.0 TELEPÍTŐI KÉZIKÖNYV ROGER UT-2 2 ÁLTALÁNOS LEÍRÁS Az UT-2 elektromos átalakítóként funkcionál az RS232 és az RS485 kommunikációs interfész-ek között.
ROGER UT-2 1 Roger UT-2 Kommunikációs interfész V3.0 TELEPÍTŐI KÉZIKÖNYV ROGER UT-2 2 ÁLTALÁNOS LEÍRÁS Az UT-2 elektromos átalakítóként funkcionál az RS232 és az RS485 kommunikációs interfész-ek között.
Képszerkesztés elméleti feladatainak kérdései és válaszai
 Képszerkesztés elméleti feladatainak kérdései és válaszai 1. A... egyedi alkotóelemek, amelyek együttesen formálnak egy képet. Helyettesítse be a pixelek paletták grafikák gammák Helyes válasz: pixelek
Képszerkesztés elméleti feladatainak kérdései és válaszai 1. A... egyedi alkotóelemek, amelyek együttesen formálnak egy képet. Helyettesítse be a pixelek paletták grafikák gammák Helyes válasz: pixelek
1. Metrológiai alapfogalmak. 2. Egységrendszerek. 2.0 verzió
 Mérés és adatgyűjtés - Kérdések 2.0 verzió Megjegyzés: ezek a kérdések a felkészülést szolgálják, nem ezek lesznek a vizsgán. Ha valaki a felkészülése alapján önállóan válaszolni tud ezekre a kérdésekre,
Mérés és adatgyűjtés - Kérdések 2.0 verzió Megjegyzés: ezek a kérdések a felkészülést szolgálják, nem ezek lesznek a vizsgán. Ha valaki a felkészülése alapján önállóan válaszolni tud ezekre a kérdésekre,
Általános követelmények a kép tartalmával és minőségével kapcsolatban
 Általános követelmények a kép tartalmával és minőségével kapcsolatban A következő követelmények egyrészt azért fontosak, hogy megfelelően dokumentálják az eseményeket (bizonyítékként felhasználóak legyenek),
Általános követelmények a kép tartalmával és minőségével kapcsolatban A következő követelmények egyrészt azért fontosak, hogy megfelelően dokumentálják az eseményeket (bizonyítékként felhasználóak legyenek),
USB adatgyűjtő eszközök és programozásuk Mérő- és adatgyűjtő rendszerek
 USB adatgyűjtő eszközök és programozásuk Mérő- és s adatgyűjt jtő rendszerek Az USB kialakulása Az USB felépítése Az USB tulajdonságai USB eszközök Áttekintés USB eszközök programozása 2 Az USB kialakulása
USB adatgyűjtő eszközök és programozásuk Mérő- és s adatgyűjt jtő rendszerek Az USB kialakulása Az USB felépítése Az USB tulajdonságai USB eszközök Áttekintés USB eszközök programozása 2 Az USB kialakulása
E-Laboratórium 2 A léptetőmotorok alkalmazásai Elméleti leírás
 E-Laboratórium 2 A léptetőmotorok alkalmazásai Elméleti leírás 1. Bevezető A szinkronmotorok csoportjában egy külön helyet a léptetőmotor foglal el, aminek a diszkrét működését, vagyis a léptetést, egy
E-Laboratórium 2 A léptetőmotorok alkalmazásai Elméleti leírás 1. Bevezető A szinkronmotorok csoportjában egy külön helyet a léptetőmotor foglal el, aminek a diszkrét működését, vagyis a léptetést, egy
Beltéri autonóm négyrotoros helikopter szabályozó rendszerének kifejlesztése és hardware-in-the-loop tesztelése
 Beltéri autonóm négyrotoros helikopter szabályozó rendszerének kifejlesztése és hardware-in-the-loop tesztelése Regula Gergely, Lantos Béla BME Villamosmérnöki és Informatikai Kar Irányítástechnika és
Beltéri autonóm négyrotoros helikopter szabályozó rendszerének kifejlesztése és hardware-in-the-loop tesztelése Regula Gergely, Lantos Béla BME Villamosmérnöki és Informatikai Kar Irányítástechnika és
Számítógépes Grafika SZIE YMÉK
 Számítógépes Grafika SZIE YMÉK Analóg - digitális Analóg: a jel értelmezési tartománya (idő), és az értékkészletes is folytonos (pl. hang, fény) Diszkrét idejű: az értelmezési tartomány diszkrét (pl. a
Számítógépes Grafika SZIE YMÉK Analóg - digitális Analóg: a jel értelmezési tartománya (idő), és az értékkészletes is folytonos (pl. hang, fény) Diszkrét idejű: az értelmezési tartomány diszkrét (pl. a
A digitális képfeldolgozás alapjai
 A digitális képfeldolgozás alapjai Digitális képfeldolgozás A digit szó jelentése szám. A digitális jelentése, számszerű. A digitális információ számokká alakított információt jelent. A számítógép a képi
A digitális képfeldolgozás alapjai Digitális képfeldolgozás A digit szó jelentése szám. A digitális jelentése, számszerű. A digitális információ számokká alakított információt jelent. A számítógép a képi
A színérzetünk három összetevőre bontható:
 Színelméleti alapok Fény A fény nem más, mint egy elektromágneses sugárzás. Ennek a sugárzásnak egy meghatározott spektrumát képes a szemünk érzékelni, ezt nevezzük látható fénynek. Ez az intervallum személyenként
Színelméleti alapok Fény A fény nem más, mint egy elektromágneses sugárzás. Ennek a sugárzásnak egy meghatározott spektrumát képes a szemünk érzékelni, ezt nevezzük látható fénynek. Ez az intervallum személyenként
Információ megjelenítés Számítógépes ábrázolás. Dr. Iványi Péter
 Információ megjelenítés Számítógépes ábrázolás Dr. Iványi Péter Raszterizáció OpenGL Mely pixelek vannak a primitíven belül fragment generálása minden ilyen pixelre Attribútumok (pl., szín) hozzárendelése
Információ megjelenítés Számítógépes ábrázolás Dr. Iványi Péter Raszterizáció OpenGL Mely pixelek vannak a primitíven belül fragment generálása minden ilyen pixelre Attribútumok (pl., szín) hozzárendelése
Virtuális Valóság. Működése és használata
 Virtuális Valóság Működése és használata Virtuális Valóság 2 Virtuális Valóság 3 Virtuális Valóság 4 Tracking Szobaméretű szabadság Tracking 5x5 méter Six Degrees of Freedom 6 Tracking 7 Constellation
Virtuális Valóság Működése és használata Virtuális Valóság 2 Virtuális Valóság 3 Virtuális Valóság 4 Tracking Szobaméretű szabadság Tracking 5x5 méter Six Degrees of Freedom 6 Tracking 7 Constellation
Felvételi, 2018 szeptember - Alapképzés, fizika vizsga -
 Sapientia Erdélyi Magyar Tudományegyetem Marosvásárhelyi Kar Felvételi, 2018 szeptember - Alapképzés, fizika vizsga - Minden tétel kötelező Hivatalból 10 pont jár Munkaidő 3 óra I Az alábbi kérdésekre
Sapientia Erdélyi Magyar Tudományegyetem Marosvásárhelyi Kar Felvételi, 2018 szeptember - Alapképzés, fizika vizsga - Minden tétel kötelező Hivatalból 10 pont jár Munkaidő 3 óra I Az alábbi kérdésekre
6000 Kecskemét Nyíri út 11. Telefon: 76/481-474; Fax: 76/486-942 bjg@pr.hu www.banyai-kkt.sulinet.hu. Gyakorló feladatok
 BÁNYAI JÚLIA GIMNÁZIUM 6000 Kecskemét Nyíri út 11. Telefon: 76/481-474; Fax: 76/486-942 bjg@pr.hu www.banyai-kkt.sulinet.hu Gyakorló feladatok I. LEGO Robotprogramozó országos csapatversenyre A következő
BÁNYAI JÚLIA GIMNÁZIUM 6000 Kecskemét Nyíri út 11. Telefon: 76/481-474; Fax: 76/486-942 bjg@pr.hu www.banyai-kkt.sulinet.hu Gyakorló feladatok I. LEGO Robotprogramozó országos csapatversenyre A következő
CARE. Biztonságos. otthonok idős embereknek CARE. Biztonságos otthonok idős embereknek 2010-09-02. Dr. Vajda Ferenc Egyetemi docens
 CARE Biztonságos CARE Biztonságos otthonok idős embereknek otthonok idős embereknek 2010-09-02 Dr. Vajda Ferenc Egyetemi docens 3D Érzékelés és Mobilrobotika kutatócsoport Budapesti Műszaki és Gazdaságtudományi
CARE Biztonságos CARE Biztonságos otthonok idős embereknek otthonok idős embereknek 2010-09-02 Dr. Vajda Ferenc Egyetemi docens 3D Érzékelés és Mobilrobotika kutatócsoport Budapesti Műszaki és Gazdaságtudományi
Színek 2013.10.20. 1
 Színek 2013.10.20. 1 Képek osztályozása Álló vagy mozgó (animált) kép Fekete-fehér vagy színes kép 2013.10.20. 2 A színes kép Az emberi szem kb. 380-760 nm hullámhosszúságú fénytartományra érzékeny. (Ez
Színek 2013.10.20. 1 Képek osztályozása Álló vagy mozgó (animált) kép Fekete-fehér vagy színes kép 2013.10.20. 2 A színes kép Az emberi szem kb. 380-760 nm hullámhosszúságú fénytartományra érzékeny. (Ez
ADATLAP MICRO XL A SZERKEZET LEÍRÁSA. 50 Hz LÖKETHOSSZ SÚLY AZ EGYES CSOMAGOK MÉRETEI
 ADATLAP MICRO XL Az ebben a dokumentációban nem található információt és/vagy műszaki dokumentációt kérjék a Mingardi Magnetic vállalat műszaki/kereskedelmi osztályától. A SZERKEZET LEÍRÁSA színezés, RAL-színek.
ADATLAP MICRO XL Az ebben a dokumentációban nem található információt és/vagy műszaki dokumentációt kérjék a Mingardi Magnetic vállalat műszaki/kereskedelmi osztályától. A SZERKEZET LEÍRÁSA színezés, RAL-színek.
Egy mozgástani feladat
 1 Egy mozgástani feladat Előző dolgozatunk melynek jele és címe: ED ~ Ismét az ellipszis egyenleteiről folytatásának tekinthető ez az írás. Leválasztottuk róla, mert bár szorosan kapcsolódnak, más a céljuk.
1 Egy mozgástani feladat Előző dolgozatunk melynek jele és címe: ED ~ Ismét az ellipszis egyenleteiről folytatásának tekinthető ez az írás. Leválasztottuk róla, mert bár szorosan kapcsolódnak, más a céljuk.
A mechanika alapjai. A pontszerű testek dinamikája
 A mechanika alapjai A pontszerű testek dinamikája Horváth András SZE, Fizika Tsz. v 0.6 1 / 26 alapi Bevezetés Newton I. Newton II. Newton III. Newton IV. alapi 2 / 26 Bevezetés alapi Bevezetés Newton
A mechanika alapjai A pontszerű testek dinamikája Horváth András SZE, Fizika Tsz. v 0.6 1 / 26 alapi Bevezetés Newton I. Newton II. Newton III. Newton IV. alapi 2 / 26 Bevezetés alapi Bevezetés Newton
Tömegpontok mozgása egyenes mentén, hajítások
 2. gyakorlat 1. Feladatok a kinematika tárgyköréből Tömegpontok mozgása egyenes mentén, hajítások 1.1. Feladat: Mekkora az átlagsebessége annak pontnak, amely mozgásának első szakaszában v 1 sebességgel
2. gyakorlat 1. Feladatok a kinematika tárgyköréből Tömegpontok mozgása egyenes mentén, hajítások 1.1. Feladat: Mekkora az átlagsebessége annak pontnak, amely mozgásának első szakaszában v 1 sebességgel
Számítógépes képelemzés 7. előadás. Dr. Balázs Péter SZTE, Képfeldolgozás és Számítógépes Grafika Tanszék
 Számítógépes képelemzés 7. előadás Dr. Balázs Péter SZTE, Képfeldolgozás és Számítógépes Grafika Tanszék Momentumok Momentum-alapú jellemzők Tömegközéppont Irányultáság 1 2 tan 2 1 2,0 1,1 0, 2 Befoglaló
Számítógépes képelemzés 7. előadás Dr. Balázs Péter SZTE, Képfeldolgozás és Számítógépes Grafika Tanszék Momentumok Momentum-alapú jellemzők Tömegközéppont Irányultáság 1 2 tan 2 1 2,0 1,1 0, 2 Befoglaló
RhT Léghőmérséklet és légnedvesség távadó
 RhT Léghőmérséklet és légnedvesség távadó UNITEK 2004-2007 2 Unitek Általános leírás Az RhT léghőmérséklet és légnedvességmérő távadó az UNITEK új fejlesztésű intelligens mérőtávadó családjának tagja.
RhT Léghőmérséklet és légnedvesség távadó UNITEK 2004-2007 2 Unitek Általános leírás Az RhT léghőmérséklet és légnedvességmérő távadó az UNITEK új fejlesztésű intelligens mérőtávadó családjának tagja.
Mérés és adatgyűjtés
 Mérés és adatgyűjtés 4. óra - levelező Mingesz Róbert Szegedi Tudományegyetem 2011. március 18. MA lev - 4. óra Verzió: 1.3 Utolsó frissítés: 2011. május 15. 1/51 Tartalom I 1 A/D konverterek alkalmazása
Mérés és adatgyűjtés 4. óra - levelező Mingesz Róbert Szegedi Tudományegyetem 2011. március 18. MA lev - 4. óra Verzió: 1.3 Utolsó frissítés: 2011. május 15. 1/51 Tartalom I 1 A/D konverterek alkalmazása
IPARI ROBOTOK. Kinematikai strukturák, munkatértípusok. 2. előadás. Dr. Pintér József
 IPARI ROBOTOK, munkatértípusok 2. előadás Dr. Pintér József Az ipari robotok kinematikai felépítése igen sokféle lehet. A kinematikai felépítés alapvetően meghatározza munkaterének alakját, a mozgási sebességét,
IPARI ROBOTOK, munkatértípusok 2. előadás Dr. Pintér József Az ipari robotok kinematikai felépítése igen sokféle lehet. A kinematikai felépítés alapvetően meghatározza munkaterének alakját, a mozgási sebességét,
VDT10 HASZNÁLATI UTASÍTÁS VDT10/D7 sorozatú készülékekhez
 VDT10 HASZNÁLATI UTASÍTÁS VDT10/D7 sorozatú készülékekhez Tartalomjegyzék 1. Monitor és funkciók...3 2. Monitor felszerelése...3 3. Alap funkciók működése...4 4. Belső hívások...4 5. Felhasználói beállítások
VDT10 HASZNÁLATI UTASÍTÁS VDT10/D7 sorozatú készülékekhez Tartalomjegyzék 1. Monitor és funkciók...3 2. Monitor felszerelése...3 3. Alap funkciók működése...4 4. Belső hívások...4 5. Felhasználói beállítások
Numerikus integrálás
 Közelítő és szimbolikus számítások 11. gyakorlat Numerikus integrálás Készítette: Gelle Kitti Csendes Tibor Somogyi Viktor Vinkó Tamás London András Deák Gábor jegyzetei alapján 1. Határozatlan integrál
Közelítő és szimbolikus számítások 11. gyakorlat Numerikus integrálás Készítette: Gelle Kitti Csendes Tibor Somogyi Viktor Vinkó Tamás London András Deák Gábor jegyzetei alapján 1. Határozatlan integrál
Miről lesz szó? Videó tartalom elemzés (VCA) leegyszerűsített működése Kültéri védelem Közúthálózat megfigyelés Emberszámlálás
 leegyszerűsített működése Kültéri védelem Közúthálózat megfigyelés Emberszámlálás") Videóanalitikát mindenhova! Princz Adorján Miről lesz szó? Videó tartalom elemzés (VCA) leegyszerűsített működése Kültéri védelem Közúthálózat megfigyelés Emberszámlálás VCA alapú detektorok Videótartalom
Videóanalitikát mindenhova! Princz Adorján Miről lesz szó? Videó tartalom elemzés (VCA) leegyszerűsített működése Kültéri védelem Közúthálózat megfigyelés Emberszámlálás VCA alapú detektorok Videótartalom
Navigáci. stervezés. Algoritmusok és alkalmazásaik. Osváth Róbert Sorbán Sámuel
 Navigáci ció és s mozgástervez stervezés Algoritmusok és alkalmazásaik Osváth Róbert Sorbán Sámuel Feladat Adottak: pálya (C), játékos, játékos ismerethalmaza, kezdőpont, célpont. Pálya szerkezete: akadályokkal
Navigáci ció és s mozgástervez stervezés Algoritmusok és alkalmazásaik Osváth Róbert Sorbán Sámuel Feladat Adottak: pálya (C), játékos, játékos ismerethalmaza, kezdőpont, célpont. Pálya szerkezete: akadályokkal
Bodó / Csató / Gaskó / Sulyok / Simon október 9. Matematika és Informatika Tanszék Babeş Bolyai Tudományegyetem, Kolozsvár
 Bodó / Csató / Gaskó / Sulyok / Simon Matematika és Informatika Tanszék Babeş Bolyai Tudományegyetem, Kolozsvár 2016. október 9. Tudnivalók Tudnivalók: 1 Csapatok kiválasztása: a második hét végéig; 2
Bodó / Csató / Gaskó / Sulyok / Simon Matematika és Informatika Tanszék Babeş Bolyai Tudományegyetem, Kolozsvár 2016. október 9. Tudnivalók Tudnivalók: 1 Csapatok kiválasztása: a második hét végéig; 2
Robotika. Relatív helymeghatározás Odometria
 Robotika Relatív helymeghatározás Odometria Differenciális hajtás c m =πd n /nc e c m D n C e n = hány mm-t tesz meg a robot egy jeladó impulzusra = névleges kerék átmérő = jeladó fölbontása (impulzus/ford.)
Robotika Relatív helymeghatározás Odometria Differenciális hajtás c m =πd n /nc e c m D n C e n = hány mm-t tesz meg a robot egy jeladó impulzusra = névleges kerék átmérő = jeladó fölbontása (impulzus/ford.)
Elektrosztatika. 1.2. Mekkora két egyenlő nagyságú töltés taszítja egymást 10 m távolságból 100 N nagyságú erővel? megoldás
 Elektrosztatika 1.1. Mekkora távolságra van egymástól az a két pontszerű test, amelynek töltése 2. 10-6 C és 3. 10-8 C, és 60 N nagyságú erővel taszítják egymást? 1.2. Mekkora két egyenlő nagyságú töltés
Elektrosztatika 1.1. Mekkora távolságra van egymástól az a két pontszerű test, amelynek töltése 2. 10-6 C és 3. 10-8 C, és 60 N nagyságú erővel taszítják egymást? 1.2. Mekkora két egyenlő nagyságú töltés
Külső eszközök. Felhasználói útmutató
 Külső eszközök Felhasználói útmutató Copyright 2006 Hewlett-Packard Development Company, L.P. A Microsoft és a Windows elnevezés a Microsoft Corporation Amerikai Egyesült Államokban bejegyzett kereskedelmi
Külső eszközök Felhasználói útmutató Copyright 2006 Hewlett-Packard Development Company, L.P. A Microsoft és a Windows elnevezés a Microsoft Corporation Amerikai Egyesült Államokban bejegyzett kereskedelmi
Gépi tanulás és Mintafelismerés
 Gépi tanulás és Mintafelismerés jegyzet Csató Lehel Matematika-Informatika Tanszék BabesBolyai Tudományegyetem, Kolozsvár 2007 Aug. 20 2 1. fejezet Bevezet A mesterséges intelligencia azon módszereit,
Gépi tanulás és Mintafelismerés jegyzet Csató Lehel Matematika-Informatika Tanszék BabesBolyai Tudományegyetem, Kolozsvár 2007 Aug. 20 2 1. fejezet Bevezet A mesterséges intelligencia azon módszereit,
Perifériáknak nevezzük a számítógép központi egységéhez kívülről csatlakozó eszközöket, melyek az adatok ki- vagy bevitelét, illetve megjelenítését
 Perifériák monitor Perifériáknak nevezzük a számítógép központi egységéhez kívülről csatlakozó eszközöket, melyek az adatok ki- vagy bevitelét, illetve megjelenítését szolgálják. Segít kapcsolatot teremteni
Perifériák monitor Perifériáknak nevezzük a számítógép központi egységéhez kívülről csatlakozó eszközöket, melyek az adatok ki- vagy bevitelét, illetve megjelenítését szolgálják. Segít kapcsolatot teremteni
Láthatósági kérdések
 Láthatósági kérdések Láthatósági algoritmusok Adott térbeli objektum és adott nézőpont esetén el kell döntenünk, hogy mi látható az adott alakzatból a nézőpontból, vagy irányából nézve. Az algoritmusok
Láthatósági kérdések Láthatósági algoritmusok Adott térbeli objektum és adott nézőpont esetén el kell döntenünk, hogy mi látható az adott alakzatból a nézőpontból, vagy irányából nézve. Az algoritmusok
OKTV 2007/2008 Informatika II. kategória döntő forduló Feladatlap. Oktatási Hivatal
 Feladatlap Kedves Versenyző! A megoldások értékelésénél csak a programok futási eredményeit vesszük tekintetbe. Ezért igen fontos a specifikáció pontos betartása. Ha például a feladat szövege adatok valamilyen
Feladatlap Kedves Versenyző! A megoldások értékelésénél csak a programok futási eredményeit vesszük tekintetbe. Ezért igen fontos a specifikáció pontos betartása. Ha például a feladat szövege adatok valamilyen
A mintavételezéses mérések alapjai
 A mintavételezéses mérések alapjai Sok mérési feladat során egy fizikai mennyiség időbeli változását kell meghatároznunk. Ha a folyamat lassan változik, akkor adott időpillanatokban elvégzett méréssel
A mintavételezéses mérések alapjai Sok mérési feladat során egy fizikai mennyiség időbeli változását kell meghatároznunk. Ha a folyamat lassan változik, akkor adott időpillanatokban elvégzett méréssel
2. Pont operációk. Kató Zoltán. Képfeldolgozás és Számítógépes Grafika tanszék SZTE (http://www.inf.u-szeged.hu/~kato/teaching/)
") 2. Pont operációk Kató Zoltán Képfeldolgozás és Számítógépes Grafika tanszék SZTE (http://www.inf.u-szeged.hu/~kato/teaching/) 2 Kép transzformációk típusai Kép értékkészletének (radiometriai információ)
2. Pont operációk Kató Zoltán Képfeldolgozás és Számítógépes Grafika tanszék SZTE (http://www.inf.u-szeged.hu/~kato/teaching/) 2 Kép transzformációk típusai Kép értékkészletének (radiometriai információ)
Számítógépes geometria (mester kurzus)
") 2010 sz, Debreceni Egyetem Csuklós szerkezetek animációja (Kép 1985-b l: Tony de Peltrie) Csontváz-modellek Csuklós szerkezet (robotkar) A robotkar részei: csuklók (joints) rotációs prizmatikus (transzlációs)
2010 sz, Debreceni Egyetem Csuklós szerkezetek animációja (Kép 1985-b l: Tony de Peltrie) Csontváz-modellek Csuklós szerkezet (robotkar) A robotkar részei: csuklók (joints) rotációs prizmatikus (transzlációs)
Kommunikáció az EuroProt-IED multifunkcionális készülékekkel
 Kommunikáció az EuroProt-IED multifunkcionális készülékekkel A Protecta intelligens EuroProt készülékei a védelem-technika és a mikroprocesszoros technológia fejlődésével párhuzamosan követik a kommunikációs
Kommunikáció az EuroProt-IED multifunkcionális készülékekkel A Protecta intelligens EuroProt készülékei a védelem-technika és a mikroprocesszoros technológia fejlődésével párhuzamosan követik a kommunikációs
Működési útmutató a H.264 HD 1082 P Távirányítóhoz
 Működési útmutató a H.264 HD 1082 P Távirányítóhoz A. Bekapcsolás gomb B. Funkció gomb C. Módkapcsoló gomb D. Világítás (piros, zöld és kék) E. Újraindítás gomb F. Mini USB G. Port TF kártyának H. MIC
Működési útmutató a H.264 HD 1082 P Távirányítóhoz A. Bekapcsolás gomb B. Funkció gomb C. Módkapcsoló gomb D. Világítás (piros, zöld és kék) E. Újraindítás gomb F. Mini USB G. Port TF kártyának H. MIC
3.óra Beviteli perifériák. Perifériák: A szg.-hez csatolt külső eszközök. A periféria illesztőkön keresztül csatlakoznak.
 3.óra Beviteli perifériák Perifériák: A szg.-hez csatolt külső eszközök. A periféria illesztőkön keresztül csatlakoznak. Csoportosításuk működési elv szerint: 1. Soros (serial) egy vezeték az előny, hátrány
3.óra Beviteli perifériák Perifériák: A szg.-hez csatolt külső eszközök. A periféria illesztőkön keresztül csatlakoznak. Csoportosításuk működési elv szerint: 1. Soros (serial) egy vezeték az előny, hátrány
2014/2015. tavaszi félév
 Hajder L. és Valasek G. hajder.levente@sztaki.mta.hu Eötvös Loránd Tudományegyetem Informatikai Kar 2014/2015. tavaszi félév Tartalom Geometria modellezés 1 Geometria modellezés 2 Geometria modellezés
Hajder L. és Valasek G. hajder.levente@sztaki.mta.hu Eötvös Loránd Tudományegyetem Informatikai Kar 2014/2015. tavaszi félév Tartalom Geometria modellezés 1 Geometria modellezés 2 Geometria modellezés
Zárójelentés. Az autonóm mobil eszközök felhasználási területei, irányítási módszerek
 Zárójelentés Az autonóm mobil eszközök felhasználási területei, irányítási módszerek Az autonóm mobil robotok elterjedése növekedést mutat napjainkban az egész hétköznapi felhasználástól kezdve az ember
Zárójelentés Az autonóm mobil eszközök felhasználási területei, irányítási módszerek Az autonóm mobil robotok elterjedése növekedést mutat napjainkban az egész hétköznapi felhasználástól kezdve az ember
Természetközeli erdőnevelési eljárások faterméstani alapjainak kidolgozása
 Zárójelentés Természetközeli erdőnevelési eljárások faterméstani alapjainak kidolgozása A kutatás időtartama: 22 25. A jelen pályázat keretében végzendő kutatás célja: A természetközeli erdőnevelési eljárások
Zárójelentés Természetközeli erdőnevelési eljárások faterméstani alapjainak kidolgozása A kutatás időtartama: 22 25. A jelen pályázat keretében végzendő kutatás célja: A természetközeli erdőnevelési eljárások
Full HD Hobby Napszemüveg Kamera Felhasználói kézikönyv. Modell: Sárga-Fekete Fekete. Termék Szerkezete
 Full HD Hobby Napszemüveg Kamera Felhasználói kézikönyv Modell: Sárga-Fekete Fekete Termék Szerkezete Termék Jellemzői 1. Nagy felbontású 720P/1080P Felbontás: 1280*720P/1920*1080P, 8 Mega Pixel 2. Videó
Full HD Hobby Napszemüveg Kamera Felhasználói kézikönyv Modell: Sárga-Fekete Fekete Termék Szerkezete Termék Jellemzői 1. Nagy felbontású 720P/1080P Felbontás: 1280*720P/1920*1080P, 8 Mega Pixel 2. Videó
Szárazföldi autonóm mobil robotok vezérlőrendszerének kialakítási lehetőségei. Kucsera Péter ZMNE Doktorandusz
 Szárazföldi autonóm mobil robotok vezérlőrendszerének kialakítási lehetőségei. Kucsera Péter ZMNE Doktorandusz A mobil robot vezérlőrendszerének feladatai Elvégzendő feladat Kommunikáció Vezérlő rendszer
Szárazföldi autonóm mobil robotok vezérlőrendszerének kialakítási lehetőségei. Kucsera Péter ZMNE Doktorandusz A mobil robot vezérlőrendszerének feladatai Elvégzendő feladat Kommunikáció Vezérlő rendszer
Automatikus irányzás digitális képek. feldolgozásával TURÁK BENCE DR. ÉGETŐ CSABA
 Automatikus irányzás digitális képek feldolgozásával TURÁK BENCE DR. ÉGETŐ CSABA Koncepció Robotmérőállomásra távcsővére rögzített kamera Képek alapján a cél automatikus detektálása És az irányzás elvégzése
Automatikus irányzás digitális képek feldolgozásával TURÁK BENCE DR. ÉGETŐ CSABA Koncepció Robotmérőállomásra távcsővére rögzített kamera Képek alapján a cél automatikus detektálása És az irányzás elvégzése
Mérés és adatgyűjtés
 Mérés és adatgyűjtés 4. óra Mingesz Róbert Szegedi Tudományegyetem 2012. február 27. MA - 4. óra Verzió: 2.1 Utolsó frissítés: 2012. március 12. 1/41 Tartalom I 1 Jelek 2 Mintavételezés 3 A/D konverterek
Mérés és adatgyűjtés 4. óra Mingesz Róbert Szegedi Tudományegyetem 2012. február 27. MA - 4. óra Verzió: 2.1 Utolsó frissítés: 2012. március 12. 1/41 Tartalom I 1 Jelek 2 Mintavételezés 3 A/D konverterek
FEGYVERNEKI SÁNDOR, Valószínűség-sZÁMÍTÁs És MATEMATIKAI
 FEGYVERNEKI SÁNDOR, Valószínűség-sZÁMÍTÁs És MATEMATIKAI statisztika 10 X. SZIMULÁCIÓ 1. VÉLETLEN számok A véletlen számok fontos szerepet játszanak a véletlen helyzetek generálásában (pénzérme, dobókocka,
FEGYVERNEKI SÁNDOR, Valószínűség-sZÁMÍTÁs És MATEMATIKAI statisztika 10 X. SZIMULÁCIÓ 1. VÉLETLEN számok A véletlen számok fontos szerepet játszanak a véletlen helyzetek generálásában (pénzérme, dobókocka,
3. A DIGILENT BASYS 2 FEJLESZTŐLAP LEÍRÁSA
 3. A DIGILENT BASYS 2 FEJLESZTŐLAP LEÍRÁSA Az FPGA tervezésben való jártasság megszerzésének célszerű módja, hogy gyári fejlesztőlapot alkalmazzunk. Ezek kiválóan alkalmasak tanulásra, de egyes ipari tervezésekhez
3. A DIGILENT BASYS 2 FEJLESZTŐLAP LEÍRÁSA Az FPGA tervezésben való jártasság megszerzésének célszerű módja, hogy gyári fejlesztőlapot alkalmazzunk. Ezek kiválóan alkalmasak tanulásra, de egyes ipari tervezésekhez
CPA 601, CPA 602, CPA 603
 CPA 601, CPA 602, CPA 603 Infravörös távvezérlő rendszer Felhasználói kézikönyv Olvassa el a teljes kezelési útmutatót a használatba helyezés előtt! A helytelen használat visszafordíthatatlan károkat okozhat!
CPA 601, CPA 602, CPA 603 Infravörös távvezérlő rendszer Felhasználói kézikönyv Olvassa el a teljes kezelési útmutatót a használatba helyezés előtt! A helytelen használat visszafordíthatatlan károkat okozhat!
A/D és D/A konverterek vezérlése számítógéppel
 11. Laboratóriumi gyakorlat A/D és D/A konverterek vezérlése számítógéppel 1. A gyakorlat célja: Az ADC0804 és a DAC08 konverterek ismertetése, bekötése, néhány felhasználási lehetőség tanulmányozása,
11. Laboratóriumi gyakorlat A/D és D/A konverterek vezérlése számítógéppel 1. A gyakorlat célja: Az ADC0804 és a DAC08 konverterek ismertetése, bekötése, néhány felhasználási lehetőség tanulmányozása,
2-VEZETÉKES KAPUTELEFON RENDSZER Beltéri egység. VDT10 Felhasználói és telepítői kézikönyv VDT10. VDT10 Leírás v1.4.pdf
 2-VEZETÉKES KAPUTELEFON RENDSZER Beltéri egység VDT10 Felhasználói és telepítői kézikönyv VDT10 VDT10 Leírás v1.4.pdf Tartalomjegyzék 1. Monitor és funkciók...3 2. Monitor felszerelése...3 3. Alap funkciók
2-VEZETÉKES KAPUTELEFON RENDSZER Beltéri egység VDT10 Felhasználói és telepítői kézikönyv VDT10 VDT10 Leírás v1.4.pdf Tartalomjegyzék 1. Monitor és funkciók...3 2. Monitor felszerelése...3 3. Alap funkciók
Küls eszközök. Dokumentum cikkszáma: Ez az útmutató a külön beszerezhető külső eszközök használatát ismerteti
 Küls eszközök Dokumentum cikkszáma: 409917-211 2006. május Ez az útmutató a külön beszerezhető külső eszközök használatát ismerteti. Tartalomjegyzék 1 Az USB-eszközök használata USB-eszköz csatlakoztatása.......................
Küls eszközök Dokumentum cikkszáma: 409917-211 2006. május Ez az útmutató a külön beszerezhető külső eszközök használatát ismerteti. Tartalomjegyzék 1 Az USB-eszközök használata USB-eszköz csatlakoztatása.......................
Színes Video Kaputelefon CDV-52A/52AS
 Színes Video Kaputelefon CDV-52A/52AS Köszönjük, hogy COMMAX terméket vásárolt. Az eszköz üzembe helyezése előtt, figyelmesen olvassa el a Felhasználói kézikönyvet és az üzemszerű működés érdekében, tartsa
Színes Video Kaputelefon CDV-52A/52AS Köszönjük, hogy COMMAX terméket vásárolt. Az eszköz üzembe helyezése előtt, figyelmesen olvassa el a Felhasználói kézikönyvet és az üzemszerű működés érdekében, tartsa
Bepillantás a gépházba
 Bepillantás a gépházba Neumann-elvű számítógépek főbb egységei A részek feladatai: Központi egység: Feladata a számítógép vezérlése, és a számítások elvégzése. Operatív memória: A számítógép bekapcsolt
Bepillantás a gépházba Neumann-elvű számítógépek főbb egységei A részek feladatai: Központi egység: Feladata a számítógép vezérlése, és a számítások elvégzése. Operatív memória: A számítógép bekapcsolt
RADPLAN. A Mentum Planet, Mentum Ellipse az InfoVista bejegyzett védjegye, minden jog fenntartva!
 RADPLAN A távközlési hálózatok teljesebb dokumentálása érdekében létrehoztuk a RadPlan rendszert, amely az optikai hálózatok elektronikus dokumentálásán kívül alkalmas még a rádiófrekvenciás hálózatok
RADPLAN A távközlési hálózatok teljesebb dokumentálása érdekében létrehoztuk a RadPlan rendszert, amely az optikai hálózatok elektronikus dokumentálásán kívül alkalmas még a rádiófrekvenciás hálózatok
Mi van a számítógépben? Hardver
 Mi van a számítógépben? Hardver A Hardver (angol nyelven: hardware) a számítógép azon alkatrészeit / részeit jelenti, amiket kézzel meg tudunk fogni. Ezen alkatrészek közül 5 fontos alkatésszel kell megismerkedni.
Mi van a számítógépben? Hardver A Hardver (angol nyelven: hardware) a számítógép azon alkatrészeit / részeit jelenti, amiket kézzel meg tudunk fogni. Ezen alkatrészek közül 5 fontos alkatésszel kell megismerkedni.
FEGYVERNEKI SÁNDOR, Valószínűség-sZÁMÍTÁs És MATEMATIKAI
 FEGYVERNEKI SÁNDOR, Valószínűség-sZÁMÍTÁs És MATEMATIKAI statisztika 4 IV. MINTA, ALAPsTATIsZTIKÁK 1. MATEMATIKAI statisztika A matematikai statisztika alapfeladatát nagy általánosságban a következőképpen
FEGYVERNEKI SÁNDOR, Valószínűség-sZÁMÍTÁs És MATEMATIKAI statisztika 4 IV. MINTA, ALAPsTATIsZTIKÁK 1. MATEMATIKAI statisztika A matematikai statisztika alapfeladatát nagy általánosságban a következőképpen
Alaplap. Slot. Bővítőkártyák. Csatolható tárolók. Portok. < Hardver
 2016/07/02 07:26 < Hardver Szerző: Sallai András Copyright Sallai András, 2014, 2015 Licenc: GNU Free Documentation License 1.3 Web: http://szit.hu Slot Az alaplap bővítőhelyei. ISA VESA-LB PCI AGP PCIE
2016/07/02 07:26 < Hardver Szerző: Sallai András Copyright Sallai András, 2014, 2015 Licenc: GNU Free Documentation License 1.3 Web: http://szit.hu Slot Az alaplap bővítőhelyei. ISA VESA-LB PCI AGP PCIE
A számítógép fő részei
 Hardver ismeretek 1 A számítógép fő részei 1. A számítógéppel végzett munka folyamata: bevitel ==> tárolás ==> feldolgozás ==> kivitel 2. A számítógépet 3 fő részre bonthatjuk: központi egységre; perifériákra;
Hardver ismeretek 1 A számítógép fő részei 1. A számítógéppel végzett munka folyamata: bevitel ==> tárolás ==> feldolgozás ==> kivitel 2. A számítógépet 3 fő részre bonthatjuk: központi egységre; perifériákra;
Keresés képi jellemzők alapján. Dr. Balázs Péter SZTE, Képfeldolgozás és Számítógépes Grafika Tanszék
 Keresés képi jellemzők alapján Dr. Balázs Péter SZTE, Képfeldolgozás és Számítógépes Grafika Tanszék Lusta gépi tanulási algoritmusok Osztályozás: k=1: piros k=5: kék k-legközelebbi szomszéd (k=1,3,5,7)
Keresés képi jellemzők alapján Dr. Balázs Péter SZTE, Képfeldolgozás és Számítógépes Grafika Tanszék Lusta gépi tanulási algoritmusok Osztályozás: k=1: piros k=5: kék k-legközelebbi szomszéd (k=1,3,5,7)
1. Fejezet Hardver Installálás
 1. Fejezet Hardver Installálás Az egyes kártyák és az opcionálisan használható kiegészítők különbözősége miatti egyes hardverkiépítések eltérhetnek egymástól. Ez a fejezet segít minden egyes Geovision
1. Fejezet Hardver Installálás Az egyes kártyák és az opcionálisan használható kiegészítők különbözősége miatti egyes hardverkiépítések eltérhetnek egymástól. Ez a fejezet segít minden egyes Geovision
Küls eszközök. Dokumentum cikkszáma: Ez az útmutató a külön beszerezhető külső eszközök használatát ismerteti
 Küls eszközök Dokumentum cikkszáma: 396847-211 2006. március Ez az útmutató a külön beszerezhető külső eszközök használatát ismerteti. Tartalomjegyzék 1 Az USB-eszközök használata USB-eszköz csatlakoztatása.......................
Küls eszközök Dokumentum cikkszáma: 396847-211 2006. március Ez az útmutató a külön beszerezhető külső eszközök használatát ismerteti. Tartalomjegyzék 1 Az USB-eszközök használata USB-eszköz csatlakoztatása.......................
Pontfelhő létrehozás és használat Regard3D és CloudCompare nyílt forráskódú szoftverekkel. dr. Siki Zoltán
 Pontfelhő létrehozás és használat Regard3D és CloudCompare nyílt forráskódú szoftverekkel dr. Siki Zoltán siki.zoltan@epito.bme.hu Regard3D Nyílt forráskódú SfM (Structure from Motion) Fényképekből 3D
Pontfelhő létrehozás és használat Regard3D és CloudCompare nyílt forráskódú szoftverekkel dr. Siki Zoltán siki.zoltan@epito.bme.hu Regard3D Nyílt forráskódú SfM (Structure from Motion) Fényképekből 3D
Bevezetés az elektronikába
 Bevezetés az elektronikába 4. Feladatsor: RGB LED, nyomógombok, hibakeresés - dugaszolós próbapanelon 1 Az RGB LED bemutatása Az RGB LED három, különböző színű LED egy közös tokban. A három szín a három
Bevezetés az elektronikába 4. Feladatsor: RGB LED, nyomógombok, hibakeresés - dugaszolós próbapanelon 1 Az RGB LED bemutatása Az RGB LED három, különböző színű LED egy közös tokban. A három szín a három
KIYO GPS M1 HASZNÁLATI ÚTMUTATÓ
 KIYO GPS M1 HASZNÁLATI ÚTMUTATÓ 1. A GPS DETEKTOR CÉLJA A GPS detektor célja, hogy előre feltöltött, ingyenesen frissíthető GPS adatbázis alapján előre jelezze a telepített traffipaxok, szekciómérések,
KIYO GPS M1 HASZNÁLATI ÚTMUTATÓ 1. A GPS DETEKTOR CÉLJA A GPS detektor célja, hogy előre feltöltött, ingyenesen frissíthető GPS adatbázis alapján előre jelezze a telepített traffipaxok, szekciómérések,
Alaplap: közös kapcsolódási felület a számítógép részegységei számára
 Alaplap: közös kapcsolódási felület a számítógép részegységei számára AGP-csatlakozó alaplapi vezérlő chip PCI-csatlakozók rögzítőkeret a hűtőhöz FDD-csatlakozó tápegységcsatlakozó S.ATAcsatlakozók P.ATAcsatlakozók
Alaplap: közös kapcsolódási felület a számítógép részegységei számára AGP-csatlakozó alaplapi vezérlő chip PCI-csatlakozók rögzítőkeret a hűtőhöz FDD-csatlakozó tápegységcsatlakozó S.ATAcsatlakozók P.ATAcsatlakozók
SZERZŐ: Kiss Róbert. Oldal1
 A LOGO MindStorms NXT/EV3 robot grafikus képernyőjét használva különböző ábrákat tudunk rajzolni. A képek létrehozásához koordináta rendszerben adott alakzatok (kör, téglalap, szakasz, pont) meghatározó
A LOGO MindStorms NXT/EV3 robot grafikus képernyőjét használva különböző ábrákat tudunk rajzolni. A képek létrehozásához koordináta rendszerben adott alakzatok (kör, téglalap, szakasz, pont) meghatározó
Alapismeretek. Tanmenet
 Alapismeretek Tanmenet Alapismeretek TANMENET-Alapismeretek Témakörök Javasolt óraszám 1. Számítógépes alapfogalmak 2. A számítógép felépítése, hardver, A központi egység 3. Hardver Perifériák 4. Hardver
Alapismeretek Tanmenet Alapismeretek TANMENET-Alapismeretek Témakörök Javasolt óraszám 1. Számítógépes alapfogalmak 2. A számítógép felépítése, hardver, A központi egység 3. Hardver Perifériák 4. Hardver
Megnevezés Leírás Megjegyzés Irodai PC
 1 Irodai PC Közepes PC 1 Közepes PC 2 Processzor: Intel Core i5; memória: 4 GB; merevlemez: 500GB HDD; optikai meghajtó: DVD-ROM; USB 3.0; billentyűzet; HUN; MS SMS client; SAMI client. Processzor: Intel
1 Irodai PC Közepes PC 1 Közepes PC 2 Processzor: Intel Core i5; memória: 4 GB; merevlemez: 500GB HDD; optikai meghajtó: DVD-ROM; USB 3.0; billentyűzet; HUN; MS SMS client; SAMI client. Processzor: Intel
72-74. Képernyő. monitor
 72-74 Képernyő monitor Monitorok. A monitorok szöveg és grafika megjelenítésére alkalmas kimeneti (output) eszközök. A képet képpontok (pixel) alkotják. Általános jellemzők (LCD) Képátló Képarány Felbontás
72-74 Képernyő monitor Monitorok. A monitorok szöveg és grafika megjelenítésére alkalmas kimeneti (output) eszközök. A képet képpontok (pixel) alkotják. Általános jellemzők (LCD) Képátló Képarány Felbontás
Képfeldolgozás Szegmentálás Osztályozás Képfelismerés Térbeli rekonstrukció
 Mesterséges látás Miről lesz szó? objektumok Bevezetés objektumok A mesterséges látás jelenlegi, technikai eszközökön alapuló világunkban gyakorlatilag azonos a számítógépes képfeldolgozással. Számítógépes
Mesterséges látás Miről lesz szó? objektumok Bevezetés objektumok A mesterséges látás jelenlegi, technikai eszközökön alapuló világunkban gyakorlatilag azonos a számítógépes képfeldolgozással. Számítógépes
A számítógépek felépítése. A számítógép felépítése
 A számítógépek felépítése A számítógépek felépítése A számítógépek felépítése a mai napig is megfelel a Neumann elvnek, vagyis rendelkezik számoló egységgel, tárolóval, perifériákkal. Tápegység 1. Tápegység:
A számítógépek felépítése A számítógépek felépítése A számítógépek felépítése a mai napig is megfelel a Neumann elvnek, vagyis rendelkezik számoló egységgel, tárolóval, perifériákkal. Tápegység 1. Tápegység:
Digitális mérőműszerek. Kaltenecker Zsolt Hiradástechnikai Villamosmérnök Szinusz Hullám Bt.
 Digitális mérőműszerek Digitális jelek mérése Kaltenecker Zsolt Hiradástechnikai Villamosmérnök Szinusz Hullám Bt. MIRŐL LESZ SZÓ? Mit mérjünk? Hogyan jelentkezik a minőségromlás digitális jel esetében?
Digitális mérőműszerek Digitális jelek mérése Kaltenecker Zsolt Hiradástechnikai Villamosmérnök Szinusz Hullám Bt. MIRŐL LESZ SZÓ? Mit mérjünk? Hogyan jelentkezik a minőségromlás digitális jel esetében?
8. Laboratóriumi gyakorlat INKREMENTÁLIS ADÓ
 8. Laboratóriumi gyakorlat INKREMENTÁLIS ADÓ 1. A gyakorlat célja: Az inkrementális adók működésének megismerése. Számítások és szoftverfejlesztés az inkrementális adók katalógusadatainak feldolgozására
8. Laboratóriumi gyakorlat INKREMENTÁLIS ADÓ 1. A gyakorlat célja: Az inkrementális adók működésének megismerése. Számítások és szoftverfejlesztés az inkrementális adók katalógusadatainak feldolgozására
IT - Alapismeretek. Feladatgyűjtemény
 IT - Alapismeretek Feladatgyűjtemény Feladatok PowerPoint 2000 1. FELADAT TÖRTÉNETI ÁTTEKINTÉS Pótolja a hiányzó neveket, kifejezéseket! Az első négyműveletes számológépet... készítette. A tárolt program
IT - Alapismeretek Feladatgyűjtemény Feladatok PowerPoint 2000 1. FELADAT TÖRTÉNETI ÁTTEKINTÉS Pótolja a hiányzó neveket, kifejezéseket! Az első négyműveletes számológépet... készítette. A tárolt program
Geometriai vagy kinematikai természetű feltételek: kötések vagy. kényszerek. 1. Egy apró korong egy mozdulatlan lejtőn vagy egy gömb belső
 Kényszerek Geometriai vagy kinematikai természetű feltételek: kötések vagy kényszerek. Példák: 1. Egy apró korong egy mozdulatlan lejtőn vagy egy gömb belső felületén mozog. Kényszerek Geometriai vagy
Kényszerek Geometriai vagy kinematikai természetű feltételek: kötések vagy kényszerek. Példák: 1. Egy apró korong egy mozdulatlan lejtőn vagy egy gömb belső felületén mozog. Kényszerek Geometriai vagy
Tranziens jelenségek rövid összefoglalás
 Tranziens jelenségek rövid összefoglalás Átmenet alakul ki akkor, ha van energiatároló (kapacitás vagy induktivitás) a rendszerben, mert ezeken a feszültség vagy áram nem jelenik meg azonnal, mint az ohmos
Tranziens jelenségek rövid összefoglalás Átmenet alakul ki akkor, ha van energiatároló (kapacitás vagy induktivitás) a rendszerben, mert ezeken a feszültség vagy áram nem jelenik meg azonnal, mint az ohmos
DATALOGIC GRYPHON GD4100 VONALKÓD OLVASÓ
 DATALOGIC GRYPHON GD4100 VONALKÓD OLVASÓ TERMÉK ISMERTETŐ Datalogic Gryphon GD4100 vonalkód olvasó A Datalogic Gryphon GD4100 mérsékelt áron kínál egy nagy teljesítményű vonalkód leolvasót, 60 hónap garanciával.
DATALOGIC GRYPHON GD4100 VONALKÓD OLVASÓ TERMÉK ISMERTETŐ Datalogic Gryphon GD4100 vonalkód olvasó A Datalogic Gryphon GD4100 mérsékelt áron kínál egy nagy teljesítményű vonalkód leolvasót, 60 hónap garanciával.
Digitális mérőműszerek
 KTE Szakmai nap, Tihany Digitális mérőműszerek Digitális jelek mérése Kaltenecker Zsolt KT-Electronic MIRŐL LESZ SZÓ? Mit mérjünk? Hogyan jelentkezik a minőségromlás digitális TV jel esetében? Milyen paraméterekkel
KTE Szakmai nap, Tihany Digitális mérőműszerek Digitális jelek mérése Kaltenecker Zsolt KT-Electronic MIRŐL LESZ SZÓ? Mit mérjünk? Hogyan jelentkezik a minőségromlás digitális TV jel esetében? Milyen paraméterekkel
Matematika III előadás
 Matematika III. - 2. előadás Vinczéné Varga Adrienn Debreceni Egyetem Műszaki Kar, Műszaki Alaptárgyi Tanszék Előadáskövető fóliák Vinczéné Varga Adrienn (DE-MK) Matematika III. 2016/2017/I 1 / 30 Egy
Matematika III. - 2. előadás Vinczéné Varga Adrienn Debreceni Egyetem Műszaki Kar, Műszaki Alaptárgyi Tanszék Előadáskövető fóliák Vinczéné Varga Adrienn (DE-MK) Matematika III. 2016/2017/I 1 / 30 Egy
Kodak DC20 Dátum : 2001-06-13 11:56:04 Szerző : gigahertz
 1 / 6 2007.12.03. 23:32 FŐOLDAL KAPCSOLAT MÉDIAAJÁNLAT PC-ÁRUHÁZ DRIVERS SZAMITOGEP E-SULI SZAKÜZLETEK REGISZTRÁCIÓ HÍRLEVÉL E-MAIL FÓRUM DRIVERT KERESEK CIKKEK TERMÉKBEMUTATÓK PC TIPPEK HÍREK VÍRUSOK
1 / 6 2007.12.03. 23:32 FŐOLDAL KAPCSOLAT MÉDIAAJÁNLAT PC-ÁRUHÁZ DRIVERS SZAMITOGEP E-SULI SZAKÜZLETEK REGISZTRÁCIÓ HÍRLEVÉL E-MAIL FÓRUM DRIVERT KERESEK CIKKEK TERMÉKBEMUTATÓK PC TIPPEK HÍREK VÍRUSOK
Általános soros sín (USB) Felhasználói útmutató Rendszerigény Nyomtatója beépített USB portja az alábbi minimális rendszerkonfiguráció mellett használ
 Felhasználói útmutató Rendszerigény Nyomtatója beépített USB portja az alábbi minimális rendszerkonfiguráció mellett használ") Általános soros sín (USB) Felhasználói útmutató Rendszerigény Nyomtatója beépített USB portja az alábbi minimális rendszerkonfiguráció mellett használható: USB porttal rendelkező PC Microsoft Windows 98,
Általános soros sín (USB) Felhasználói útmutató Rendszerigény Nyomtatója beépített USB portja az alábbi minimális rendszerkonfiguráció mellett használható: USB porttal rendelkező PC Microsoft Windows 98,
Kép mátrix. Feladat: Pap Gáborné-Zsakó László: Algoritmizálás, adatmodellezés 2/35
 Grafika I. Kép mátrix Feladat: Egy N*M-es raszterképet nagyítsunk a két-szeresére pontsokszorozással: minden régi pont helyébe 2*2 azonos színű pontot rajzolunk a nagyított képen. Pap Gáborné-Zsakó László:
Grafika I. Kép mátrix Feladat: Egy N*M-es raszterképet nagyítsunk a két-szeresére pontsokszorozással: minden régi pont helyébe 2*2 azonos színű pontot rajzolunk a nagyított képen. Pap Gáborné-Zsakó László:
Moore & more than Moore
 1 Moore & more than Moore Fürjes Péter E-mail:, www.mems.hu 2 A SZILÍCIUM (silex) 3 A SZILÍCIUM Felfedező: Jons Berzelius 1823, Svédország Természetes előfordulás: gránit, kvarc, agyag, homok 2. leggyakoribb
1 Moore & more than Moore Fürjes Péter E-mail:, www.mems.hu 2 A SZILÍCIUM (silex) 3 A SZILÍCIUM Felfedező: Jons Berzelius 1823, Svédország Természetes előfordulás: gránit, kvarc, agyag, homok 2. leggyakoribb
IV. LEGO Robotprogramozó Országos Csapatverseny
 BÁNYAI JÚLIA GIMNÁZIUM - ROBOTIKA CSOPORT Tel.: 76/481-474 (+36 20 479 8460) Fax.: 76/486-942 web: http://www.banyai-kkt.sulinet.hu/robotika e-mail: robotika.bjg@gmail.com IV. LEGO Robotprogramozó Országos
BÁNYAI JÚLIA GIMNÁZIUM - ROBOTIKA CSOPORT Tel.: 76/481-474 (+36 20 479 8460) Fax.: 76/486-942 web: http://www.banyai-kkt.sulinet.hu/robotika e-mail: robotika.bjg@gmail.com IV. LEGO Robotprogramozó Országos
Tamás Ferenc: S-VGA monitorok
 Monitorok: SVGA Tamás Ferenc: SVGA monitorok A nagysikerű VGA monitort az IBM tervei szerint az XGA követte, de a valóságban a számítógépes gyárak még egy bőrt le akartak húzni az igen jól csengő, nagyon
Monitorok: SVGA Tamás Ferenc: SVGA monitorok A nagysikerű VGA monitort az IBM tervei szerint az XGA követte, de a valóságban a számítógépes gyárak még egy bőrt le akartak húzni az igen jól csengő, nagyon
Útjelzések, akadályok felismerése valós időben
 Útjelzések, akadályok felismerése valós időben Dr. Hidvégi Timót Széchenyi István Egyetem Győr, 9026, Egyetem tér 1. hidvegi@sze.hu 1. Bevezető Sajnos a közúton a balesetek egy része abból adódik, hogy
Útjelzések, akadályok felismerése valós időben Dr. Hidvégi Timót Széchenyi István Egyetem Győr, 9026, Egyetem tér 1. hidvegi@sze.hu 1. Bevezető Sajnos a közúton a balesetek egy része abból adódik, hogy
Tartalomjegyzék. Előszó... xi. 1. Bevezetés... 1. 2. Mechanikai, elektromos és logikai jellemzők... 13
 Előszó... xi 1. Bevezetés... 1 1.1. Fogalmak, definíciók... 1 1.1.1. Mintapéldák... 2 1.1.1.1. Mechanikus kapcsoló illesztése... 2 1.1.1.2. Nyomtató illesztése... 3 1.1.1.3. Katódsugárcsöves kijelző (CRT)
Előszó... xi 1. Bevezetés... 1 1.1. Fogalmak, definíciók... 1 1.1.1. Mintapéldák... 2 1.1.1.1. Mechanikus kapcsoló illesztése... 2 1.1.1.2. Nyomtató illesztése... 3 1.1.1.3. Katódsugárcsöves kijelző (CRT)
KÉRDÉSEK PROGRAMOZÁSBÓL_TKU (ESZTERGÁLÁS) 1. Írd le а CNC megmunkáló rendszerek jellemző pontjainak neveit: a) М 0,5 b) А 0,5 c) W 0,5 d) R 0,5
 1. Írd le а CNC megmunkáló rendszerek jellemző pontjainak neveit: a) М 0,5 b) А 0,5 c) W 0,5 d) R 0,5") KÉRDÉSEK PROGRAMOZÁSBÓL_TKU (ESZTERGÁLÁS) 1. Írd le а CNC megmunkáló rendszerek jellemző pontjainak neveit: a) М 0,5 b) А 0,5 c) W 0,5 d) R 0,5 2. Rajzold le a CNC megmunkáló rendszerek jellemző pontjait:
KÉRDÉSEK PROGRAMOZÁSBÓL_TKU (ESZTERGÁLÁS) 1. Írd le а CNC megmunkáló rendszerek jellemző pontjainak neveit: a) М 0,5 b) А 0,5 c) W 0,5 d) R 0,5 2. Rajzold le a CNC megmunkáló rendszerek jellemző pontjait:
Minden mérésre vonatkozó minimumkérdések
 Minden mérésre vonatkozó minimumkérdések 1) Definiálja a rendszeres hibát 2) Definiálja a véletlen hibát 3) Definiálja az abszolút hibát 4) Definiálja a relatív hibát 5) Hogyan lehet az abszolút-, és a
Minden mérésre vonatkozó minimumkérdések 1) Definiálja a rendszeres hibát 2) Definiálja a véletlen hibát 3) Definiálja az abszolút hibát 4) Definiálja a relatív hibát 5) Hogyan lehet az abszolút-, és a
FEDÉLZETI INERCIÁLIS ADATGYŰJTŐ RENDSZER ALKALMAZÁSA PILÓTA NÉLKÜLI REPÜLŐGÉPEKBEN BEVEZETÉS
 Koncz Miklós Tamás FEDÉLZETI INERCIÁLIS ADATGYŰJTŐ RENDSZER ALKALMAZÁSA PILÓTA NÉLKÜLI REPÜLŐGÉPEKBEN BEVEZETÉS Magyarországon megszűnt a nagyoroszi (Drégelypalánk) lőtér, a térségben található egyetlen,
Koncz Miklós Tamás FEDÉLZETI INERCIÁLIS ADATGYŰJTŐ RENDSZER ALKALMAZÁSA PILÓTA NÉLKÜLI REPÜLŐGÉPEKBEN BEVEZETÉS Magyarországon megszűnt a nagyoroszi (Drégelypalánk) lőtér, a térségben található egyetlen,