Gyakorlati példa: DC motorok pozíció szabályozása
|
|
|
- Szebasztián Szabó
- 7 évvel ezelőtt
- Látták:
Átírás
1 Gyakorlati példa: DC motorok pozíció szabályozása

2 A feladat mechanika Kamera forgatása 2 tengely körül 30 Watt, 12 V kefés DC motorok Végállás érzékelők nélkül Relatív encoderek 1:7 szíjáttételek
3 A feladat követelmények Kalibráció végállás érzékelők nélkül Követési hiba figyelembe vétele Pozíció referencia fogadása PC től tengelyenként Rámpa függvényen mozgatás Maximális sebesség és gyorsulás értékek fogadása PC től
4 A feladat mérnöki szemmel
5 A feladat mérnöki szemmel Blokk diagramos felvázolás doboz külső követelményei meghatározhatók: 12 V tápfeszültség 2 DC motor 2 encoder USB port
6 A feladat mérnöki szemmel A doboz belső követelményei meghatározhatók első közelítésben (blokk diagram rajzolása során változhat): Beágyazott rendszer (mikrokontroller használata) Feszültség stabilizátorok Teljes H hidak Encoder csatlakozók, jelillesztések Soros USB átalakító (Kiegészítések: bluetooth port, soros port, végállás kapcsolók fogadása, ventilátor kapcsolása aktív hűtéshez.)
7 A feladat mérnöki szemmel Belső blokk diagram készítése:
8 A feladat mérnöki szemmel Elemek elméleti áttekintése címszavakban: Motorok (kefés DC motor) Visszacsatolási (encoder) Feszültség szabályozó Mikrokontroller Teljesítmény elektronika (H híd) Soros USB átalakító Bluetooth modul
9 A feladat mérnöki szemmel Motorok Léptető motorok Kefés DC motorok Háromfázisú motorok AC BLDC PMSM
10 A feladat mérnöki szemmel Visszacsolás Áram Sönt ellenállás Hall szenzor Pozíció és sebesség Potenciométer Resolver Back EMF Encoder
11 A feladat mérnöki szemmel Feszültség szabályozó Feszültség átalakítása kis teljesítményben Különböző pontoságokkal Állítható, fix feszültség szabályozók Kapcsoló üzemű LDO Stb.
12 A feladat mérnöki szemmel Mikrokontroller A mikrokontroller egyetlen lapkára integrált, általában vezérlési feladatokra optimalizált számítógép. Leggyakoribb perifériák: Oszcillátor Operatív tár Számlálók, időzítők Watchdog timer EEPROM Jelátalakítók (AD/DA) Kommunikációs buszok

13 H híd A feladat mérnöki szemmel
14 A feladat mérnöki szemmel Alkatrészek választása és kapcsolási rajz készítése: Fontos a követelmények meghatározása alkatrészenként Fogyasztások számolása Mikrokontroller perifériák H hidak teljesítménye Hődisszipáció Encoderek típusa Stb.
15 A feladat mérnöki szemmel

16 Blokkok kapcsolási rajza Feszültség szabályozó 5 V & 3,3 V: Biztosíték Zavarszűrés Pufferelés Adatlap szerint bekötések
17 Blokkok kapcsolási rajza Mikrokontroller: AtXmega 16 A4 Adatlap szerint bekötés Analóg és digitális táp leválasztása Perifériák bekötése LED ek debuggoláshoz
18 Blokkok kapcsolási rajza Programozó csatlakozó és órajel
19 Blokkok kapcsolási rajza Encoder csatlakozók és végállás kapcsolók
20 Blokkok kapcsolási rajza Soros USB átalakító:

21 Blokkok kapcsolási rajza Bluetooth modul:

22 Blokkok kapcsolási rajza H hidak: VNH2SP30
23 Nyomtatott áramkör Tervezési szempontok: Alkatrészek távolsága Zavarvédelem Fóliák elhelyezése Hűtőpadok Nagyfrekvenciás vonalak Kommunikációs vonalak Induktivitás elhelyezése Puffer kapacitások elhelyezése
24 Nyomtatott áramkör

25 Nyomtatott áramkör Táp és bluetooth A bluetooth nagyfrekvenciás Nem tehető össze más digitális jelekkel Tápellátást nem zavarja a kapacitások miatt




26 Nyomtatott áramkör Encoder illesztés Jelek felhúzása a csatlakozó mellett Szűrőkondenzátorok a csatlakozó mellett a tápvonalakhoz

27 Nyomtatott áramkör Mikrokontroller és soros USB Földfóliák az ic k alatt Tápfólia a processzor alatt a túloldalon Szűrőkapacitások a táp és föld lábaknál Kristályok távolsága Programozó csatlakozó távolsága Tápvonalak vastagsága (zavarvédelem miatt)

28 Nyomtatott áramkör H hidak Nagy felületű táp, föld, motor vonalak hűtés és áram miatt Távolságok a hő eloszlás és a digitális jelek védelme miatt Ventilátor kapcsolása opcionálisan (aktív hűtés)
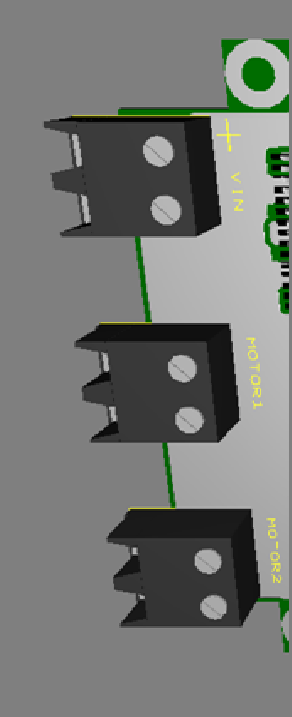

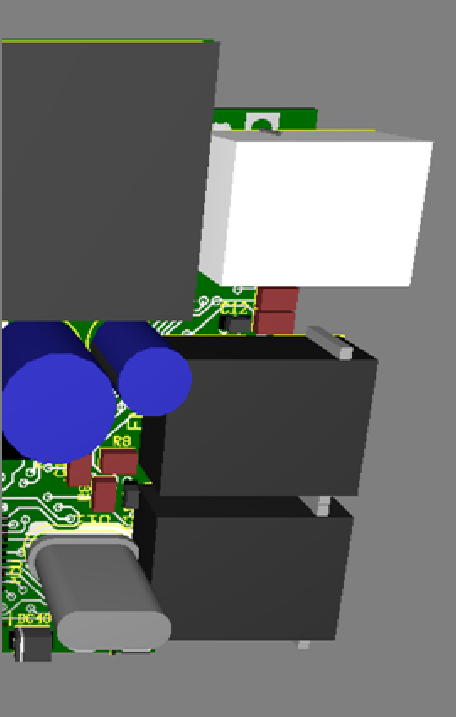



29 Nyomtatott áramkör 3D
30 Nyomtatott áramkör Fénykép
31 Elmélet és gyakorlat kapcsolata Miért PID szabályozás? Hogyan ragadható meg szemléletesen a PID? Hogyan lesz az elméleti egyenletekből megvalósított mozgó rendszer?
32 Newton II. Szabályozástechnika megközelítése más szemszögből Newton második törvénye: A dinamika alaptörvénye Más törvényekkel is analóg (Ohm törvény U=R*I) Az erő a tömeg és a gyorsulás szorzata Millions saw the apple fall, but Newton was the one who asked why. Bernard Mannes Baruch
33 Jelölések Vezessük be a következő dinamikában megszokott jelöléseket ahol: x az elmozdulás Az idő szerinti deriváltakat ponttal jelöljük Q az erő
34 Autó futómű példája A futómű célja, hogy az út egyenetlenségeit csillapítsa. Hidraulikus csillapítás: D (lengéscsillapító) Rugalmasság: P (rúgó) Cél: elmozdulás 0 legyen (x), (ekkor a gyorsulás és a sebesség is 0)
35 Autó futómű példája A futómű célja, hogy az út egyenetlenségeit csillapítsa. A csillapítás felveszi az út hibáit a keréktől. Az autó a nagy tömege és tehetetlensége miatt nem mozdul el sokat egy kátyú esetén. A rúgó visszaállítja a csillapítást. A futómű egy mechanikus szabályozó. Cél ezek elektronikus, szoftveres megvalósítása minden rendszer esetén.
36 Autó futómű példája A futómű célja, hogy az út egyenetlenségeit csillapítsa. Szükség van a rendszer mozgásegyenleteire. Ennek alapja Newton II. axiómája. A rúgóerő arányos a rúgó összenyomódásával. A csillapítóerő arányos a sebességgel. Az autó egy helyben maradásához, (vagy egyenes vonalú egyenletes mozgásához, pl.: emelkedőn felfelé az autó kasznija is halad lassan felfelé és az utast nem zavarja, mert nem hirtelen mozgás) a gyorsulás 0 kell, hogy legyen.
37 Autó futómű példája A futómű célja, hogy az út egyenetlenségeit csillapítsa. A rúgóerő az összenyomódás és a rugóállandó szorzata. A csillapító erő a sebesség és a csillapítási tényező szorzata. Az erők előjeles összege megadja a tömeg és a gyorsulás szorzatát.
38 Autó futómű példája A futómű célja, hogy az út egyenetlenségeit csillapítsa. Az erőket előjelesen összegezve és behelyettesítve megkapjuk a mozgásegyenletet. Az erők előjeles összege megadja a tömeg és a gyorsulás szorzatát. Behelyettesítve a gyorsulásba 0 t:
39 Autó futómű példája PD szabályozó A P és D tagok a szabályozó súlyai. P az arányos D pedig a differenciális tag. Sok esetben hangolással állítják be. Az egyes tagok számítással is megkaphatóak. Érdekesség, a példa megértéséhez a számítás szükségtelen: A homogén megoldást kell számolnunk a szabályozás során. A differenciálegyenlet homogén megoldását az alábbi összefüggés adja: (Ez pontosan a kerékre ható erő ellenereje.)
40 Autó futómű példája PD szabályozó A magas erősítés azt jelenti, hogy a kimenet változása nagy lesz. Az arányos tag arányos a hibajellel. Virtuális rúgónak tekinthető. A differenciáló tag késlelteti a szabályozó kimenetének változásának a mértékét. Arányos a hibajel változási sebességével. Ezen túl a differenciáló tag szerepe, hogy csökkentse az integráló tag túllendülését (későbbiekben kerül sorra az integráló tag), valamint fokozza a szabályozási folyamat stabilitását. Virtuális csillapításnak tekinthető.
41 DC motoros mozgatás példája A cél hasonló. Egy motor hajt egy orsót, melynek mentén lineárisan elmozdul egy tömeg. Nem a gyorsulás minimalizálása a cél, hanem egy referencia pont megközelítése. Mérni kell a tömeg elmozdulását. Elektronikusan kell szabályozni a motort. A pontosság fontos.
42 DC motoros mozgatás példája A tömeg mozgatásának minőségi követelményei vannak: Kis túllendülés az elmozdulás során Kis maradó hiba (keskeny hibahatár legyen) Rövid felfutási idő Rövid lappangási idő Rövid szabályozási idő
43 DC motoros mozgatás példája PID szabályozó PD szabályozó esetén maradhat egy kis hiba, és előfordulhat az is, hogy a rendszer oszcillál a hibahatáron belül. A hiba (P tag) és a hiba deriváltja (D tag) ezeket nem képes kompenzálni. Szükség van a hiba integráljára is. Az integráló tag arányos a hibajel nagyságával és időtartamával is. Összegezve a pillanatnyi hibát időről időre (integrálva) megadja az offset hibát.
44 DC motoros mozgatás példája PID szabályozó Érdekesség: nem mindig lehetséges a hiba integrálása. Ekkor a teljes egyenlet deriválásával kapjuk a szükséges szabályozó értéket.
45 PID szabályozó összefoglalás
46 PID szabályozó a valóságban A probléma: A valós rendszerek folytonos idejűek A számítások, mintavételezések diszkrét idejűek. Órajelre működnek, milliszekundumos nagyságrendben. A számításokat, mindig az aktuális értékből számoljuk, de a beavatkozás csak a számítások végén történik meg. (Milliszekundumokkal később.) A szabályozónak késése van.
47 PID szabályozó a valóságban A probléma: taz idő ts a mintavételi idő és a szabályozó periódusideje tj jelen idő x a szabályozandó mennyiség Q a beavatkozó jel
48 PID szabályozó a valóságban A megoldás: A rendszerek időállandója nagyságrendekkel nagyobb,mint a szabályozóé. (Nem történnek nagy változások egy ciklus alatt.) Pl.: egy tömeg mozgásállapota a tehetetlenség miatt, lehet, hogy csak fél másodperc alatt változik nagyobb értéket. Ez idő alatt a szabályozó többször le tud futni. A mérés pontossága nagyságrenddel, vagy néhányszor nagyobb, mint a szükséges beállási pontosság. (A kis változások is mérhetőek, hogy lehetőleg minden ciklusban legyen használható mérési eredmény.) Szélsőséges esetekben: speciális szabályozási algoritmusok (pl. állapotbecslők) alkalmazása.
49 További érdekesség Átviteli függvény bevezetése Nem minden esetben triviális, vagy lineáris a kapcsolat a beavatkozó jel és a rendszer kimenet között. A DC motoros hajtás esetében feszültséggel, avatkozunk be. A kimenet lehet nyomaték, erő, elmozdulás, stb. Fel kell írni a kimenet és a bemenet közti kapcsolatot. (Az átviteli függvényt.)
50 További érdekesség Átviteli függvény bevezetése Egyszerű példa: fogaskerék kapcsolat és erőkar M1 a hajtótengely nyomatéka (a rendszer bemenete) M2 a hajtott tengely nyomatéka d1 a hajtótengely átmérője d2 a hajtott tengely átmérője F az erő (a rendszer kimenete) k az erőkar
51 További érdekesség Átviteli függvény bevezetése Egyszerű példa: fogaskerék kapcsolat és erőkar
52 További érdekesség Átviteli függvény bevezetése Egyszerű példa: fogaskerék kapcsolat és erőkar Az átviteli függvény a kimenet és a bemenet hányadosa. Egyegy átviteli függvény alakjából nagyon sok információ nyerhető. Ismeretlen rendszerek esetén, ahol a felírás nem lehetséges az átviteli függvény mérhető. Megkönnyíti a szabályozó tervezését. Stabilitás vizsgálat lehetséges. Fázistartalék és más adatok számolhatók.
53 PID alkalmazása A rendszervázlat általánosan, ahol a folyamat lehet pl.: Kefés DC motor (egyenáramú motor) Háromfázisú motor Komplex mechanikai rendszer
54 Egyenáramú motor elméleti háttér DC motor esetén a process
55 Egyenáramú motor DC motor esetén a process Laplace
56 Egyenáramú motor DC motor esetén a process az előző egyenletek alapján
57 Egyenáramú motor DC motor esetén a process átviteli függvény
58 Egyenáramú motor DC motor esetén a process időállandók bevezetése A súrlódást elhanyagolva Tehát egytárolós tagként modellezhető ha
59 PID alkalmazása DC motor áramszabályozott blokkvázlata Pozíció szabályozott blokkvázlata
60 PD alkalmazása Pozíció szabályozás Jelen példában PWM frekvencia nagysága 15 Khz Miért? Ha túl kicsi: nem tudunk kellő gyorsasággal beavatkozni, lüktethet a fordulat vagy a nyomaték, hallhatjuk a motor sípolását Ha túl nagy: nagyobbak a kapcsolási veszteségek, nagyobb a melegedés mind a motoron, mind a teljesítmény elektronikán PD szabályozási frekvencia 1 Khz Miért? Ha túl kicsi: nem tudunk kellő gyorsasággal beavatkozni Ha túl nagy: a pozíció nem változik mérhető értéket így feleslegesen emésztünk fel erőforrást

61 PD alkalmazása Pozíció szabályozás Jelen példában A PID bemenete: pozíció referencia A PID kimenete: PWM kitöltés és irány Maradó hiba: elhanyagolható a szögjeladó pontossága miatt Ki=0 PD szabályozó Tehát:
62 PD alkalmazása Pozíció szabályozás Hogyan épüljön fel a PD a mikrokontrollerben? Diszkrét rendszerről van szó a mikrokontroller miatt Az arányos tag (P tag) egyszerű A deriválás (D tag) definíció szerint Amely rögzített x (diszkrét idő) esetén egyszerű matematikai műveletté válik Mivel a D tagot szorozzuk annak súlyával hangoláskor, így a konstanssal való osztás elhagyható
63 PD alkalmazása Pozíció szabályozás Diszkrét PD szabályozó C kódja
64 PD alkalmazása Pozíció szabályozás Diszkrét PD szabályozó C kódja egymagában kevés Miért? Egységugrást kapunk referenciaként (pont pont irányítás) Interpoláció szükséges Nem tudjuk a 0 pontot ha a rendszer indul Kalibráció szükséges Nem érzékelünk ütközést Követési hiba detektálás szükséges
65 PD alkalmazása Pozíció szabályozás Interpoláció Pont pont irányításról beszélünk, ha a robothajtások tengelyei számára nincs definiálva a pálya, csak a soron következő pont. Folytonos pályairányítás a befutó pontok között interpoláció történik, amely elvégezhető csuklókoordinátákban vagy Descartes koordinátákban.
66 PD alkalmazása Pozíció szabályozás Interpoláció Rámpa fv. Folytonos pályairányítás Az egységugrások elkerülése miatt a sebesség idő függvény maximumát, felfutási és lefutási meredekségét (a gyorsulást) állítja be az interpolátor, amely diszkrét időben fut Az egyes referenciák között közbenső pontokat kell megadnunk a PD szabályozónak Sebesség profil Pontok sűrűsége A B távolságon diszkrét időben
67 PD alkalmazása Pozíció szabályozás Hogyan programozhatunk rámpa függvényt? 3 egyenes felírásával, melyeknek pontjait diszkrét időben számoljuk Minden számítás esetén vizsgáljuk a referencia és a jelenlegi pozíció közti távolságot, hogy tudjuk melyik egyenesen kell haladnunk A kapott rámpa fv. aktuális értékét (nagyságát) hozzáadjuk a pályatervező előző referenciájához, így alakul ki a kívánt sűrűség távolság fv.
68 PD alkalmazása Pozíció szabályozás Kalibráció Követelmények Lassú mozgás a végállásig Végálláshoz érve leállás és mozgás a szoftveres limit felé Végállás kapcsoló nélkül Megoldás Lassú mozgás esetén a PID (tehát a PWM) alacsony értékű A végálláshoz érve a PID növeli értékét az egyre nagyobb hiba miatt (le van maradva a pályatervezőtől) Bizonyos PID érték felett tudjuk, hogy a végálláshoz értünk, nullázzuk a pozíciót A megoldás során a PID értékét figyeljük
69 PD alkalmazása Pozíció szabályozás Követési hiba Követelmények A pályatervezőtől való nagy lemaradás esetén ütközés, vagy egyéb probléma feltételezhető (mint a végállás esetében) Ebben az esetben álljon le a rendszer Megoldás A pályatervező időről időre új pontokat definiál, a hibát a pályatervező által kiadott referencia és a jelenlegi pozíció között számoljuk A pozíció állandó értéke esetén a hiba folyamatosan nő (tehát a motor elakadt) Bizonyos hiba érték felett a rendszer leáll A pályatervező által adott referencia és a jelenleg pozíció különbségét figyeljük
70 Köszönöm a figyelmet
Számítógépvezérelt irányítás és szabályozás elmélete (Bevezetés a rendszer- és irányításelméletbe, Computer Controlled Systems) 7.
 7.") Számítógépvezérelt irányítás és szabályozás elmélete (Bevezetés a rendszer- és irányításelméletbe, Computer Controlled Systems) 7. előadás Szederkényi Gábor Pázmány Péter Katolikus Egyetem Információs
Számítógépvezérelt irányítás és szabályozás elmélete (Bevezetés a rendszer- és irányításelméletbe, Computer Controlled Systems) 7. előadás Szederkényi Gábor Pázmány Péter Katolikus Egyetem Információs
MINTA Írásbeli Záróvizsga Mechatronikai mérnök MSc. Debrecen,
 MINTA Írásbeli Záróvizsga Mechatronikai mérnök MSc Debrecen, 2017. 01. 03. Név: Neptun kód: Megjegyzések: A feladatok megoldásánál használja a géprajz szabályait, valamint a szabványos áramköri elemeket.
MINTA Írásbeli Záróvizsga Mechatronikai mérnök MSc Debrecen, 2017. 01. 03. Név: Neptun kód: Megjegyzések: A feladatok megoldásánál használja a géprajz szabályait, valamint a szabványos áramköri elemeket.
ÉRZÉKELŐK ÉS BEAVATKOZÓK II. 5. DC MOTOROK SZABÁLYOZÁS FORDULATSZÁM- SZABÁLYOZÁS
 ÉRZÉKELŐK ÉS BEAVATKOZÓK II. 5. DC MOTOROK SZABÁLYOZÁS FORDULATSZÁM- SZABÁLYOZÁS Dr. Soumelidis Alexandros 2019.03.13. BME KÖZLEKEDÉSMÉRNÖKI ÉS JÁRMŰMÉRNÖKI KAR 32708-2/2017/INTFIN SZÁMÚ EMMI ÁLTAL TÁMOGATOTT
ÉRZÉKELŐK ÉS BEAVATKOZÓK II. 5. DC MOTOROK SZABÁLYOZÁS FORDULATSZÁM- SZABÁLYOZÁS Dr. Soumelidis Alexandros 2019.03.13. BME KÖZLEKEDÉSMÉRNÖKI ÉS JÁRMŰMÉRNÖKI KAR 32708-2/2017/INTFIN SZÁMÚ EMMI ÁLTAL TÁMOGATOTT
MECHATRONIKA Mechatronika alapképzési szak (BSc) záróvizsga kérdései. (Javítás dátuma: )
 záróvizsga kérdései. (Javítás dátuma: )") MECHATRONIKA 2010 Mechatronika alapképzési szak (BSc) záróvizsga kérdései (Javítás dátuma: 2016.12.20.) A FELKÉSZÜLÉS TÉMAKÖREI A számozott vizsgakérdések a rendezett felkészülés érdekében vastag betűkkel
MECHATRONIKA 2010 Mechatronika alapképzési szak (BSc) záróvizsga kérdései (Javítás dátuma: 2016.12.20.) A FELKÉSZÜLÉS TÉMAKÖREI A számozott vizsgakérdések a rendezett felkészülés érdekében vastag betűkkel
Tartalom. Soros kompenzátor tervezése 1. Tervezési célok 2. Tervezés felnyitott hurokban 3. Elemzés zárt hurokban 4. Demonstrációs példák
 Tartalom Soros kompenzátor tervezése 1. Tervezési célok 2. Tervezés felnyitott hurokban 3. Elemzés zárt hurokban 4. Demonstrációs példák 215 1 Tervezési célok Szabályozó tervezés célja Stabilitás biztosítása
Tartalom Soros kompenzátor tervezése 1. Tervezési célok 2. Tervezés felnyitott hurokban 3. Elemzés zárt hurokban 4. Demonstrációs példák 215 1 Tervezési célok Szabályozó tervezés célja Stabilitás biztosítása
Érzékelők és beavatkozók
 Érzékelők és beavatkozók DC motorok 3. rész egyetemi docens - 1 - DC motorvezérlés H-híd: +V r Motor mozgatás előre Motor mozgatás hátra Fékezés Szabadonfutás a vezérlés függvényében UL LL + Ø - UR LR
Érzékelők és beavatkozók DC motorok 3. rész egyetemi docens - 1 - DC motorvezérlés H-híd: +V r Motor mozgatás előre Motor mozgatás hátra Fékezés Szabadonfutás a vezérlés függvényében UL LL + Ø - UR LR
Haszongépj. Németh. Huba. és s Fejlesztési Budapest. Kutatási. Knorr-Bremse. 2004. November 17. Knorr-Bremse 19.11.
 Haszongépj pjármű fékrendszer intelligens vezérl rlése Németh Huba Knorr-Bremse Kutatási és s Fejlesztési si Központ, Budapest 2004. November 17. Knorr-Bremse 19.11.2004 Huba Németh 1 Tartalom Motiváció
Haszongépj pjármű fékrendszer intelligens vezérl rlése Németh Huba Knorr-Bremse Kutatási és s Fejlesztési si Központ, Budapest 2004. November 17. Knorr-Bremse 19.11.2004 Huba Németh 1 Tartalom Motiváció
Érzékelők és beavatkozók
 Érzékelők és beavatkozók DC motorok 1. rész egyetemi docens - 1 - Főbb típusok: Elektromos motorok Egyenáramú motor DC motor. Kefenélküli egyenáramú motor BLDC motor. Indukciós motor AC motor aszinkron
Érzékelők és beavatkozók DC motorok 1. rész egyetemi docens - 1 - Főbb típusok: Elektromos motorok Egyenáramú motor DC motor. Kefenélküli egyenáramú motor BLDC motor. Indukciós motor AC motor aszinkron
D/A konverter statikus hibáinak mérése
 D/A konverter statikus hibáinak mérése Segédlet a Járműfedélzeti rendszerek II. tantárgy laboratóriumi méréshez Dr. Bécsi Tamás, Dr. Aradi Szilárd, Fehér Árpád 2016. szeptember A méréshez szükséges eszközök
D/A konverter statikus hibáinak mérése Segédlet a Járműfedélzeti rendszerek II. tantárgy laboratóriumi méréshez Dr. Bécsi Tamás, Dr. Aradi Szilárd, Fehér Árpád 2016. szeptember A méréshez szükséges eszközök
Gépészeti rendszertechnika (NGB_KV002_1)
") Gépészeti rendszertechnika (NGB_KV002_1) 5. Óra Kőrös Péter Közúti és Vasúti Járművek Tanszék Tanszéki mérnök (IS201 vagy a tanszéken) E-mail: korosp@ga.sze.hu Web: http://www.sze.hu/~korosp http://www.sze.hu/~korosp/gepeszeti_rendszertechnika/
Gépészeti rendszertechnika (NGB_KV002_1) 5. Óra Kőrös Péter Közúti és Vasúti Járművek Tanszék Tanszéki mérnök (IS201 vagy a tanszéken) E-mail: korosp@ga.sze.hu Web: http://www.sze.hu/~korosp http://www.sze.hu/~korosp/gepeszeti_rendszertechnika/
Analóg elektronika - laboratóriumi gyakorlatok
 Analóg elektronika - laboratóriumi gyakorlatok. Mûveleti erõsítõk egyenáramú jellemzése és alkalmazásai. Elmélet Az erõsítõ fogalmát valamint az integrált mûveleti erõsítõk szerkezetét és viselkedését
Analóg elektronika - laboratóriumi gyakorlatok. Mûveleti erõsítõk egyenáramú jellemzése és alkalmazásai. Elmélet Az erõsítõ fogalmát valamint az integrált mûveleti erõsítõk szerkezetét és viselkedését
2. Elméleti összefoglaló
 2. Elméleti összefoglaló 2.1 A D/A konverterek [1] A D/A konverter feladata, hogy a bemenetére érkező egész számmal arányos analóg feszültséget vagy áramot állítson elő a kimenetén. A működéséhez szükséges
2. Elméleti összefoglaló 2.1 A D/A konverterek [1] A D/A konverter feladata, hogy a bemenetére érkező egész számmal arányos analóg feszültséget vagy áramot állítson elő a kimenetén. A működéséhez szükséges
Irányítástechnikai alapok. Zalotay Péter főiskolai docens KKMF
 Irányítástechnikai alapok Zalotay Péter főiskolai docens KKMF Az irányítás feladatai és fajtái: Alapfogalmak Irányítás: Műszaki berendezések ( gépek, gyártó sorok, szállító eszközök, vegyi-, hő-technikai
Irányítástechnikai alapok Zalotay Péter főiskolai docens KKMF Az irányítás feladatai és fajtái: Alapfogalmak Irányítás: Műszaki berendezések ( gépek, gyártó sorok, szállító eszközök, vegyi-, hő-technikai
Step/Dir Interface. STDIF_1c. StepDirIFxmega_1c
 Step/Dir Interface STDIF_1c StepDirIFxmega_1c Step/Dir előtét analóg bemenetű vezérlőkhöz Áttekintés Bontásból viszonylag olcsón hozzá lehet jutni régebbi típusú analóg bemenetű DC, BL és AC szervóvezérlőkhöz.
Step/Dir Interface STDIF_1c StepDirIFxmega_1c Step/Dir előtét analóg bemenetű vezérlőkhöz Áttekintés Bontásból viszonylag olcsón hozzá lehet jutni régebbi típusú analóg bemenetű DC, BL és AC szervóvezérlőkhöz.
Soros felépítésű folytonos PID szabályozó
 Soros felépítésű folytonos PID szabályozó Főbb funkciók: A program egy PID szabályozót és egy ez által szabályozott folyamatot szimulál, a kimeneti és a beavatkozó jel grafikonon való ábrázolásával. A
Soros felépítésű folytonos PID szabályozó Főbb funkciók: A program egy PID szabályozót és egy ez által szabályozott folyamatot szimulál, a kimeneti és a beavatkozó jel grafikonon való ábrázolásával. A
Logaritmikus erősítő tanulmányozása
 13. fejezet A műveleti erősítők Logaritmikus erősítő tanulmányozása A műveleti erősítő olyan elektronikus áramkör, amely a két bemenete közötti potenciálkülönbséget igen nagy mértékben fölerősíti. A műveleti
13. fejezet A műveleti erősítők Logaritmikus erősítő tanulmányozása A műveleti erősítő olyan elektronikus áramkör, amely a két bemenete közötti potenciálkülönbséget igen nagy mértékben fölerősíti. A műveleti
Az egységugrás függvény a 0 időpillanatot követően 10 nagyságú jelet ad, valamint K=2. Vizsgáljuk meg a kimenetet:
 II Gyakorlat A gyakorlat célja, hogy megismerkedjük az egyszerű szabályozási kör stabilitásának vizsgálati módszerét, valamint a PID szabályzó beállításának egy lehetséges módját. Tekintsük az alábbi háromtárolós
II Gyakorlat A gyakorlat célja, hogy megismerkedjük az egyszerű szabályozási kör stabilitásának vizsgálati módszerét, valamint a PID szabályzó beállításának egy lehetséges módját. Tekintsük az alábbi háromtárolós
Hurokegyenlet alakja, ha az áram irányával megegyező feszültségeséseket tekintjük pozitívnak:
 Első gyakorlat A gyakorlat célja, hogy megismerkedjünk Matlab-SIMULINK szoftverrel és annak segítségével sajátítsuk el az Automatika c. tantárgy gyakorlati tananyagát. Ezen a gyakorlaton ismertetésre kerül
Első gyakorlat A gyakorlat célja, hogy megismerkedjünk Matlab-SIMULINK szoftverrel és annak segítségével sajátítsuk el az Automatika c. tantárgy gyakorlati tananyagát. Ezen a gyakorlaton ismertetésre kerül
1. Metrológiai alapfogalmak. 2. Egységrendszerek. 2.0 verzió
 Mérés és adatgyűjtés - Kérdések 2.0 verzió Megjegyzés: ezek a kérdések a felkészülést szolgálják, nem ezek lesznek a vizsgán. Ha valaki a felkészülése alapján önállóan válaszolni tud ezekre a kérdésekre,
Mérés és adatgyűjtés - Kérdések 2.0 verzió Megjegyzés: ezek a kérdések a felkészülést szolgálják, nem ezek lesznek a vizsgán. Ha valaki a felkészülése alapján önállóan válaszolni tud ezekre a kérdésekre,
Ipari mintavételes PID szabályozóstruktúra megvalósítása
 Ipari mintavételes PID szabályozóstruktúra megvalósítása 1. A gyakorlat célja Készítsen diszkrét PID szabályozót megvalósító programot C++, obiektumorientált környezetben. Teszteléssel igazolja a szabályozó
Ipari mintavételes PID szabályozóstruktúra megvalósítása 1. A gyakorlat célja Készítsen diszkrét PID szabályozót megvalósító programot C++, obiektumorientált környezetben. Teszteléssel igazolja a szabályozó
I. C8051Fxxx mikrovezérlők hardverfelépítése, működése. II. C8051Fxxx mikrovezérlők programozása. III. Digitális perifériák
 I. C8051Fxxx mikrovezérlők hardverfelépítése, működése 1. Adja meg a belső RAM felépítését! 2. Miben különbözik a belső RAM alsó és felső felének elérhetősége? 3. Hogyan érhetők el az SFR regiszterek?
I. C8051Fxxx mikrovezérlők hardverfelépítése, működése 1. Adja meg a belső RAM felépítését! 2. Miben különbözik a belső RAM alsó és felső felének elérhetősége? 3. Hogyan érhetők el az SFR regiszterek?
IRÁNYÍTÁSTECHNIKAI ALAPOK. Erdei István Grundfos South East Europe Kft.
 IRÁNYÍTÁSTECHNIKAI ALAPOK Erdei István Grundfos South East Europe Kft. Irányítástechnika felosztása Vezérléstechnika Szabályozástechnika Miért szabályozunk? Távhő rendszerek üzemeltetése Ø A fogyasztói
IRÁNYÍTÁSTECHNIKAI ALAPOK Erdei István Grundfos South East Europe Kft. Irányítástechnika felosztása Vezérléstechnika Szabályozástechnika Miért szabályozunk? Távhő rendszerek üzemeltetése Ø A fogyasztói
Mechanika I-II. Példatár
 Budapesti Műszaki és Gazdaságtudományi Egyetem Műszaki Mechanika Tanszék Mechanika I-II. Példatár 2012. május 24. Előszó A példatár célja, hogy támogassa a mechanika I. és mechanika II. tárgy oktatását
Budapesti Műszaki és Gazdaságtudományi Egyetem Műszaki Mechanika Tanszék Mechanika I-II. Példatár 2012. május 24. Előszó A példatár célja, hogy támogassa a mechanika I. és mechanika II. tárgy oktatását
Ipari kemencék PID irányítása
 Ipari kemencék PID irányítása 1. A gyakorlat célja: Az ellenállással melegített ipari kemencék modelljének meghatározása. A Opelt PID tervezési módszer alkalmazása ipari kemencék irányítására. Az ipari
Ipari kemencék PID irányítása 1. A gyakorlat célja: Az ellenállással melegített ipari kemencék modelljének meghatározása. A Opelt PID tervezési módszer alkalmazása ipari kemencék irányítására. Az ipari
Laboratóriumi műszerek megvalósítása ARM alapú mikrovezérlővel és Linux-szal
 Laboratóriumi műszerek megvalósítása ARM alapú mikrovezérlővel és Linux-szal Fuszenecker Róbert Budapesti Műszaki Főiskola Kandó Kálmán Műszaki Főiskolai Kar 2007. október 17. Laboratóriumi berendezések
Laboratóriumi műszerek megvalósítása ARM alapú mikrovezérlővel és Linux-szal Fuszenecker Róbert Budapesti Műszaki Főiskola Kandó Kálmán Műszaki Főiskolai Kar 2007. október 17. Laboratóriumi berendezések
Mit nevezünk nehézségi erőnek?
 Mit nevezünk nehézségi erőnek? Azt az erőt, amelynek hatására a szabadon eső testek g (gravitációs) gyorsulással esnek a vonzó test centruma felé, nevezzük nehézségi erőnek. F neh = m g Mi a súly? Azt
Mit nevezünk nehézségi erőnek? Azt az erőt, amelynek hatására a szabadon eső testek g (gravitációs) gyorsulással esnek a vonzó test centruma felé, nevezzük nehézségi erőnek. F neh = m g Mi a súly? Azt
PÉLDÁK ERŐTÖRVÉNYEKRE
 PÉLÁ ERŐTÖRVÉNYERE Szabad erők: erőtörvénnyel megadhatók, általában nem függenek a test mozgásállapotától (sebességtől, gyorsulástól) Példák: nehézségi erő, súrlódási erők, rugalmas erők, felhajtóerők,
PÉLÁ ERŐTÖRVÉNYERE Szabad erők: erőtörvénnyel megadhatók, általában nem függenek a test mozgásállapotától (sebességtől, gyorsulástól) Példák: nehézségi erő, súrlódási erők, rugalmas erők, felhajtóerők,
Encom EDS800/EDS1000 frekvenciaváltó alapparaméterei
 Encom EDS800/EDS1000 frekvenciaváltó alapparaméterei Paraméter Érték Leírás F0.00 F0.02 0 Billentyűzet potméter 4 Külső potméter VC1 bemenetre 0 Vezérlés billentyűzetről 1 Vezérlés sorkapcsokról 3 Vezérlés
Encom EDS800/EDS1000 frekvenciaváltó alapparaméterei Paraméter Érték Leírás F0.00 F0.02 0 Billentyűzet potméter 4 Külső potméter VC1 bemenetre 0 Vezérlés billentyűzetről 1 Vezérlés sorkapcsokról 3 Vezérlés
Elektromechanikai rendszerek szimulációja
 Kandó Polytechnic of Technology Institute of Informatics Kóré László Elektromechanikai rendszerek szimulációja I Budapest 1997 Tartalom 1.MINTAPÉLDÁK...2 1.1 IDEÁLIS EGYENÁRAMÚ MOTOR FESZÜLTSÉG-SZÖGSEBESSÉG
Kandó Polytechnic of Technology Institute of Informatics Kóré László Elektromechanikai rendszerek szimulációja I Budapest 1997 Tartalom 1.MINTAPÉLDÁK...2 1.1 IDEÁLIS EGYENÁRAMÚ MOTOR FESZÜLTSÉG-SZÖGSEBESSÉG
A/D és D/A konverterek vezérlése számítógéppel
 11. Laboratóriumi gyakorlat A/D és D/A konverterek vezérlése számítógéppel 1. A gyakorlat célja: Az ADC0804 és a DAC08 konverterek ismertetése, bekötése, néhány felhasználási lehetőség tanulmányozása,
11. Laboratóriumi gyakorlat A/D és D/A konverterek vezérlése számítógéppel 1. A gyakorlat célja: Az ADC0804 és a DAC08 konverterek ismertetése, bekötése, néhány felhasználási lehetőség tanulmányozása,
Gingl Zoltán, Szeged, :47 Elektronika - Műveleti erősítők
 Gingl Zoltán, Szeged, 06. 06.. 3. 7:47 Elektronika - Műveleti erősítők 06.. 3. 7:47 Elektronika - Műveleti erősítők Passzív elemek nem lehet erősíteni, csi jeleket kezelni erősen korlátozott műveletek
Gingl Zoltán, Szeged, 06. 06.. 3. 7:47 Elektronika - Műveleti erősítők 06.. 3. 7:47 Elektronika - Műveleti erősítők Passzív elemek nem lehet erősíteni, csi jeleket kezelni erősen korlátozott műveletek
Dr. Gyurcsek István. Példafeladatok. Helygörbék Bode-diagramok HELYGÖRBÉK, BODE-DIAGRAMOK DR. GYURCSEK ISTVÁN
 Dr. Gyurcsek István Példafeladatok Helygörbék Bode-diagramok 1 2016.11.11.. Helygörbe szerkesztése VIZSGÁLAT: Mi a következménye annak, ha az áramkör valamelyik jellemző paramétere változik? Helygörbe
Dr. Gyurcsek István Példafeladatok Helygörbék Bode-diagramok 1 2016.11.11.. Helygörbe szerkesztése VIZSGÁLAT: Mi a következménye annak, ha az áramkör valamelyik jellemző paramétere változik? Helygörbe
Jelgenerátorok ELEKTRONIKA_2
 Jelgenerátorok ELEKTRONIKA_2 TEMATIKA Jelgenerátorok osztályozása. Túlvezérelt erősítők. Feszültségkomparátorok. Visszacsatolt komparátorok. Multivibrátor. Pozitív visszacsatolás. Oszcillátorok. RC oszcillátorok.
Jelgenerátorok ELEKTRONIKA_2 TEMATIKA Jelgenerátorok osztályozása. Túlvezérelt erősítők. Feszültségkomparátorok. Visszacsatolt komparátorok. Multivibrátor. Pozitív visszacsatolás. Oszcillátorok. RC oszcillátorok.
Irányítástechnika 12. évfolyam
 Irányítástechnika 12. évfolyam Irányítástechnikai alapismeretek Az irányítás fogalma. Irányítási példák. Az irányítás részműveletei: Érzékelés (információszerzés). Ítéletalkotás (az megszerzett információ
Irányítástechnika 12. évfolyam Irányítástechnikai alapismeretek Az irányítás fogalma. Irányítási példák. Az irányítás részműveletei: Érzékelés (információszerzés). Ítéletalkotás (az megszerzett információ
ELEKTROTECHNIKA-ELEKTRONIKA ELEKTROTECHNIKA
 ELEKTROTECHNIKA-ELEKTRONIKA ELEKTROTECHNIKA 1. Egyenáramú körök Követelmények, matematikai alapok, prefixumok Töltés, áramerősség Feszültség Ellenállás és vezetés. Vezetők, szigetelők Áramkör fogalma Áramköri
ELEKTROTECHNIKA-ELEKTRONIKA ELEKTROTECHNIKA 1. Egyenáramú körök Követelmények, matematikai alapok, prefixumok Töltés, áramerősség Feszültség Ellenállás és vezetés. Vezetők, szigetelők Áramkör fogalma Áramköri
ACS-1000 Ipari analóg szabályozó rendszer
 ACS is an acronym for Analog Control System ; a laboratory teaching system with analog control courses Az 17 különböző dugaszolható modulból és az ACS-18001 DC szervó motor & szabályozó egységből áll.
ACS is an acronym for Analog Control System ; a laboratory teaching system with analog control courses Az 17 különböző dugaszolható modulból és az ACS-18001 DC szervó motor & szabályozó egységből áll.
GPS nyomvonalkövető megvalósítása DSP-n
 GPS nyomvonalkövető megvalósítása DSP-n Készítették: Végh Tamás (KYCG35) Bencze Balázs (WAPUNG) Konzulensek: Molnár Károly Bogár István Nyomvonalkövetés felhasználási lehetőségei Mezőgazdasági alkalmazás
GPS nyomvonalkövető megvalósítása DSP-n Készítették: Végh Tamás (KYCG35) Bencze Balázs (WAPUNG) Konzulensek: Molnár Károly Bogár István Nyomvonalkövetés felhasználási lehetőségei Mezőgazdasági alkalmazás
Minden mérésre vonatkozó minimumkérdések
 Minden mérésre vonatkozó minimumkérdések 1) Definiálja a rendszeres hibát 2) Definiálja a véletlen hibát 3) Definiálja az abszolút hibát 4) Definiálja a relatív hibát 5) Hogyan lehet az abszolút-, és a
Minden mérésre vonatkozó minimumkérdések 1) Definiálja a rendszeres hibát 2) Definiálja a véletlen hibát 3) Definiálja az abszolút hibát 4) Definiálja a relatív hibát 5) Hogyan lehet az abszolút-, és a
A mechanika alapjai. A pontszerű testek kinematikája. Horváth András SZE, Fizika és Kémia Tsz szeptember 29.
 A mechanika alapjai A pontszerű testek kinematikája Horváth András SZE, Fizika és Kémia Tsz. 2006. szeptember 29. 2 / 35 Több alapfogalom ismerős lehet a középiskolából. Miért tanulunk erről mégis? 3 /
A mechanika alapjai A pontszerű testek kinematikája Horváth András SZE, Fizika és Kémia Tsz. 2006. szeptember 29. 2 / 35 Több alapfogalom ismerős lehet a középiskolából. Miért tanulunk erről mégis? 3 /
Analóg-digitál átalakítók (A/D konverterek)
") 9. Laboratóriumi gyakorlat Analóg-digitál átalakítók (A/D konverterek) 1. A gyakorlat célja: Bemutatjuk egy sorozatos közelítés elvén működő A/D átalakító tömbvázlatát és elvi kapcsolási rajzát. Tanulmányozzuk
9. Laboratóriumi gyakorlat Analóg-digitál átalakítók (A/D konverterek) 1. A gyakorlat célja: Bemutatjuk egy sorozatos közelítés elvén működő A/D átalakító tömbvázlatát és elvi kapcsolási rajzát. Tanulmányozzuk
Multi-20 modul. Felhasználói dokumentáció 1.1. Készítette: Parrag László. Jóváhagyta: Rubin Informatikai Zrt.
 Multi-20 modul Felhasználói dokumentáció. Készítette: Parrag László Jóváhagyta: Rubin Informatikai Zrt. 49 Budapest, Egressy út 7-2. telefon: +36 469 4020; fax: +36 469 4029 e-mail: info@rubin.hu; web:
Multi-20 modul Felhasználói dokumentáció. Készítette: Parrag László Jóváhagyta: Rubin Informatikai Zrt. 49 Budapest, Egressy út 7-2. telefon: +36 469 4020; fax: +36 469 4029 e-mail: info@rubin.hu; web:
Irányításelmélet és technika I.
 Irányításelmélet és technika I. Mechanikai rendszerek dinamikus leírása Magyar Attila Pannon Egyetem Műszaki Informatikai Kar Villamosmérnöki és Információs Rendszerek Tanszék amagyar@almos.vein.hu 2010
Irányításelmélet és technika I. Mechanikai rendszerek dinamikus leírása Magyar Attila Pannon Egyetem Műszaki Informatikai Kar Villamosmérnöki és Információs Rendszerek Tanszék amagyar@almos.vein.hu 2010
Szárazföldi autonóm mobil robotok vezérlőrendszerének kialakítási lehetőségei. Kucsera Péter ZMNE Doktorandusz
 Szárazföldi autonóm mobil robotok vezérlőrendszerének kialakítási lehetőségei. Kucsera Péter ZMNE Doktorandusz A mobil robot vezérlőrendszerének feladatai Elvégzendő feladat Kommunikáció Vezérlő rendszer
Szárazföldi autonóm mobil robotok vezérlőrendszerének kialakítási lehetőségei. Kucsera Péter ZMNE Doktorandusz A mobil robot vezérlőrendszerének feladatai Elvégzendő feladat Kommunikáció Vezérlő rendszer
SYS700-A Digitális szabályozó és vezérlõ modul DDC rendszerelemek, DIALOG-III család. Terméktámogatás:
 DDC rendszerelemek, DIALOG-III család KIVITEL ALKALMAZÁS A SYS00-A a Dialog-III készülékcsalád analóg jelek kezelésére alkalmas tagja, amely kifejezetten épületgépészeti szabályozási és vezérlési feladatok
DDC rendszerelemek, DIALOG-III család KIVITEL ALKALMAZÁS A SYS00-A a Dialog-III készülékcsalád analóg jelek kezelésére alkalmas tagja, amely kifejezetten épületgépészeti szabályozási és vezérlési feladatok
X. ANALÓG JELEK ILLESZTÉSE DIGITÁLIS ESZKÖZÖKHÖZ
 X. ANALÓG JELEK ILLESZTÉSE DIGITÁLIS ESZKÖZÖKHÖZ Ma az analóg jelek feldolgozása (is) mindinkább digitális eszközökkel és módszerekkel történik. A feldolgozás előtt az analóg jeleket digitalizálni kell.
X. ANALÓG JELEK ILLESZTÉSE DIGITÁLIS ESZKÖZÖKHÖZ Ma az analóg jelek feldolgozása (is) mindinkább digitális eszközökkel és módszerekkel történik. A feldolgozás előtt az analóg jeleket digitalizálni kell.
SZENZORMODUL ILLESZTÉSE LEGO NXT PLATFORMHOZ. Készítette: Horváth András MSc Önálló laboratórium 2 Konzulens: Orosz György
 SZENZORMODUL ILLESZTÉSE LEGO NXT PLATFORMHOZ Készítette: Horváth András MSc Önálló laboratórium 2 Konzulens: Orosz György BEVEZETÉS Simonyi Károly szakkollégium LEGO és robotika kör NXT Cél: Választott
SZENZORMODUL ILLESZTÉSE LEGO NXT PLATFORMHOZ Készítette: Horváth András MSc Önálló laboratórium 2 Konzulens: Orosz György BEVEZETÉS Simonyi Károly szakkollégium LEGO és robotika kör NXT Cél: Választott
Szabályozás Irányítástechnika PE MIK MI BSc 1
 Szabályozás 2008.03.29. Irányítástechnika PE MIK MI BSc 1 Nyílt hatásláncú rendszerek Az irányító rendszer nem ellenőrzi a beavatkozás eredményét vezérlő rendszerek ahol w(s) bemenő változó / előírt érték
Szabályozás 2008.03.29. Irányítástechnika PE MIK MI BSc 1 Nyílt hatásláncú rendszerek Az irányító rendszer nem ellenőrzi a beavatkozás eredményét vezérlő rendszerek ahol w(s) bemenő változó / előírt érték
Történeti Áttekintés
 Történeti Áttekintés Történeti Áttekintés Értesülés, Információ Érzékelő Ítéletalkotó Értesülés, Információ Anyag, Energia BE Jelformáló Módosító Termelőeszköz Folyamat Rendelkezés Beavatkozás Anyag,
Történeti Áttekintés Történeti Áttekintés Értesülés, Információ Érzékelő Ítéletalkotó Értesülés, Információ Anyag, Energia BE Jelformáló Módosító Termelőeszköz Folyamat Rendelkezés Beavatkozás Anyag,
Mechatronika alapjai órai jegyzet
 - 1969-ben alakult ki a szó - Rendszerek és folyamatok, rendszertechnika - Automatika, szabályozás - számítástechnika Cd olvasó: Dia Mechatronika alapjai órai jegyzet Minden mechatronikai rendszer alapstruktúrája
- 1969-ben alakult ki a szó - Rendszerek és folyamatok, rendszertechnika - Automatika, szabályozás - számítástechnika Cd olvasó: Dia Mechatronika alapjai órai jegyzet Minden mechatronikai rendszer alapstruktúrája
AMV 10, AMV 20, AMV 30 AMV 13, AMV 23, AMV
 Adatlap Szelepmozgató motorok három-pont szabályozáshoz AMV 10, AMV 20, AMV 30 AMV 13, AMV 23, AMV 33 - DIN EN 14597 bizonyítvánnyal rendelkező biztonsági funkció (záró rugó) Leírás AMV 10 AMV 13 AMV 20,
Adatlap Szelepmozgató motorok három-pont szabályozáshoz AMV 10, AMV 20, AMV 30 AMV 13, AMV 23, AMV 33 - DIN EN 14597 bizonyítvánnyal rendelkező biztonsági funkció (záró rugó) Leírás AMV 10 AMV 13 AMV 20,
Analóg-digitális átalakítás. Rencz Márta/ Ress S. Elektronikus Eszközök Tanszék
 Analóg-digitális átalakítás Rencz Márta/ Ress S. Elektronikus Eszközök Tanszék Mai témák Mintavételezés A/D átalakítók típusok D/A átalakítás 12/10/2007 2/17 A/D ill. D/A átalakítók A világ analóg, a jelfeldolgozás
Analóg-digitális átalakítás Rencz Márta/ Ress S. Elektronikus Eszközök Tanszék Mai témák Mintavételezés A/D átalakítók típusok D/A átalakítás 12/10/2007 2/17 A/D ill. D/A átalakítók A világ analóg, a jelfeldolgozás
3. Jelöljük meg a numerikus gyökkereső módszerekre vonatkozó egyedüli helyes kijelentést:
 INFORMATICĂ PENTRU FIZICIENI 1. Egy mechanikai rendszerre vonatkozó Newtoni-mozgástörvényben megjelenő valamely paraméter nem pontos. Milyen típusú hibát eredményez az említett bizonytalanság az egyenlet
INFORMATICĂ PENTRU FIZICIENI 1. Egy mechanikai rendszerre vonatkozó Newtoni-mozgástörvényben megjelenő valamely paraméter nem pontos. Milyen típusú hibát eredményez az említett bizonytalanság az egyenlet
Programozható Vezérlő Rendszerek. Hardver
 Programozható Vezérlő Rendszerek Hardver Hardver-bemeneti kártyák 12-24 Vdc 100-120 Vac 10-60 Vdc 12-24 Vac/dc 5 Vdc (TTL) 200-240 Vac 48 Vdc 24 Vac Belül 5V DC!! 2 Hardver-bemeneti kártyák Potenciál ingadozások
Programozható Vezérlő Rendszerek Hardver Hardver-bemeneti kártyák 12-24 Vdc 100-120 Vac 10-60 Vdc 12-24 Vac/dc 5 Vdc (TTL) 200-240 Vac 48 Vdc 24 Vac Belül 5V DC!! 2 Hardver-bemeneti kártyák Potenciál ingadozások
Analóg elektronika - laboratóriumi gyakorlatok
 Analóg elektronika - laboratóriumi gyakorlatok. Mûveleti erõsítõk váltakozó-áramú alkalmazásai. Elmélet Az integrált mûveleti erõsítõk váltakozó áramú viselkedését a. fejezetben (jegyzet és prezentáció)
Analóg elektronika - laboratóriumi gyakorlatok. Mûveleti erõsítõk váltakozó-áramú alkalmazásai. Elmélet Az integrált mûveleti erõsítõk váltakozó áramú viselkedését a. fejezetben (jegyzet és prezentáció)
Áramköri elemek mérése ipari módszerekkel
 3. aboratóriumi gyakorlat Áramköri elemek mérése ipari módszerekkel. dolgozat célja oltmérők, ampermérők használata áramköri elemek mérésénél, mérési hibák megállapítása és azok függősége a használt mérőműszerek
3. aboratóriumi gyakorlat Áramköri elemek mérése ipari módszerekkel. dolgozat célja oltmérők, ampermérők használata áramköri elemek mérésénél, mérési hibák megállapítása és azok függősége a használt mérőműszerek
10.1. ANALÓG JELEK ILLESZTÉSE DIGITÁLIS ESZKÖZÖKHÖZ
 101 ANALÓG JELEK ILLESZTÉSE DIGITÁLIS ESZKÖZÖKHÖZ Ma az analóg jelek feldolgozása (is) mindinkább digitális eszközökkel történik A feldolgozás előtt az analóg jeleket digitalizálni kell Rendszerint az
101 ANALÓG JELEK ILLESZTÉSE DIGITÁLIS ESZKÖZÖKHÖZ Ma az analóg jelek feldolgozása (is) mindinkább digitális eszközökkel történik A feldolgozás előtt az analóg jeleket digitalizálni kell Rendszerint az
Gépészeti rendszertechnika (NGB_KV002_1)
") Gépészeti rendszertechnika (NGB_KV002_1) 6. Óra Kőrös Péter Közúti és Vasúti Járművek Tanszék Tanszéki mérnök (IS201 vagy a tanszéken) E-mail: korosp@ga.sze.hu Web: http://www.sze.hu/~korosp http://www.sze.hu/~korosp/gepeszeti_rendszertechnika/
Gépészeti rendszertechnika (NGB_KV002_1) 6. Óra Kőrös Péter Közúti és Vasúti Járművek Tanszék Tanszéki mérnök (IS201 vagy a tanszéken) E-mail: korosp@ga.sze.hu Web: http://www.sze.hu/~korosp http://www.sze.hu/~korosp/gepeszeti_rendszertechnika/
Űrtechnológia október 24. Műholdfedélzeti energiaellátás / 2 Műholdfedélzeti szolgálati rendszerek Felügyeleti, telemetria és telekommand rendsz
 Szélessávú Hírközlés és Villamosságtan Tanszék Űrkutató Csoport Szabó József A fedélzeti energiaellátás kérdései: architektúrák, energiaegyensúly. Űrtechnológia Budapest, 2018. október 24. Űrtechnológia
Szélessávú Hírközlés és Villamosságtan Tanszék Űrkutató Csoport Szabó József A fedélzeti energiaellátás kérdései: architektúrák, energiaegyensúly. Űrtechnológia Budapest, 2018. október 24. Űrtechnológia
ÁGAZATI SZAKMAI ÉRETTSÉGI VIZSGA VILLAMOSIPAR ÉS ELEKTRONIKA ISMERETEK EMELT SZINTŰ SZÓBELI VIZSGA MINTAFELADATOK ÉS ÉRTÉKELÉSÜK
 VILLAMOSIPAR ÉS ELEKTRONIKA ISMERETEK EMELT SZINTŰ SZÓBELI VIZSGA MINTAFELADATOK ÉS ÉRTÉKELÉSÜK Szóbeli vizsgarész értékelési táblázata A szóbeli felelet értékelése az alábbi szempontok és alapján történik:
VILLAMOSIPAR ÉS ELEKTRONIKA ISMERETEK EMELT SZINTŰ SZÓBELI VIZSGA MINTAFELADATOK ÉS ÉRTÉKELÉSÜK Szóbeli vizsgarész értékelési táblázata A szóbeli felelet értékelése az alábbi szempontok és alapján történik:
Mechatronika, Optika és Gépészeti Informatika Tanszék MOTOR - BOARD
 echatronika, Optika és Gépészeti Informatika Tanszék OTOR - BORD I. Elméleti alapok a felkészüléshez 1. vizsgált berendezés mérést a HPS System Technik (www.hps-systemtechnik.com) rendszereszközök segítségével
echatronika, Optika és Gépészeti Informatika Tanszék OTOR - BORD I. Elméleti alapok a felkészüléshez 1. vizsgált berendezés mérést a HPS System Technik (www.hps-systemtechnik.com) rendszereszközök segítségével
DITEC kapunyitó automatikák és automata sorompók karbantartási utasítása
 DITEC kapunyitó automatikák és automata sorompók karbantartási utasítása A karbantartás 12 havonta végzendő! Rendszeres ellenőrzéseket képzett szakember végezze a termék a dokumentációja alapján. Kapunyitó
DITEC kapunyitó automatikák és automata sorompók karbantartási utasítása A karbantartás 12 havonta végzendő! Rendszeres ellenőrzéseket képzett szakember végezze a termék a dokumentációja alapján. Kapunyitó
Az ábrán a mechatronikát alkotó tudományos területek egymás közötti viszonya látható. A szenzorok és aktuátorok a mechanika és elektrotechnika szoros
 Aktuátorok Az ábrán a mechatronikát alkotó tudományos területek egymás közötti viszonya látható. A szenzorok és aktuátorok a mechanika és elektrotechnika szoros kapcsolatára utalnak. mért nagyság A fizikai
Aktuátorok Az ábrán a mechatronikát alkotó tudományos területek egymás közötti viszonya látható. A szenzorok és aktuátorok a mechanika és elektrotechnika szoros kapcsolatára utalnak. mért nagyság A fizikai
Mérés és adatgyűjtés
 Mérés és adatgyűjtés 4. óra - levelező Mingesz Róbert Szegedi Tudományegyetem 2011. március 18. MA lev - 4. óra Verzió: 1.3 Utolsó frissítés: 2011. május 15. 1/51 Tartalom I 1 A/D konverterek alkalmazása
Mérés és adatgyűjtés 4. óra - levelező Mingesz Róbert Szegedi Tudományegyetem 2011. március 18. MA lev - 4. óra Verzió: 1.3 Utolsó frissítés: 2011. május 15. 1/51 Tartalom I 1 A/D konverterek alkalmazása
Iványi László ARM programozás. Szabó Béla 6. Óra ADC és DAC elmélete és használata
 ARM programozás 6. Óra ADC és DAC elmélete és használata Iványi László ivanyi.laszlo@stud.uni-obuda.hu Szabó Béla szabo.bela@stud.uni-obuda.hu Mi az ADC? ADC -> Analog Digital Converter Analóg jelek mintavételezéssel
ARM programozás 6. Óra ADC és DAC elmélete és használata Iványi László ivanyi.laszlo@stud.uni-obuda.hu Szabó Béla szabo.bela@stud.uni-obuda.hu Mi az ADC? ADC -> Analog Digital Converter Analóg jelek mintavételezéssel
Rogowski-tekercses árammérő rendszer tervezése és fejlesztése
 Rogowski-tekercses árammérő rendszer tervezése és fejlesztése Fekete Ádám, Schmidt László, Szabó László, Dr. Varga László Fekete Ádám és Varga Balázs Budapest, 2013.04.24 Transzformátorok és mérőváltók
Rogowski-tekercses árammérő rendszer tervezése és fejlesztése Fekete Ádám, Schmidt László, Szabó László, Dr. Varga László Fekete Ádám és Varga Balázs Budapest, 2013.04.24 Transzformátorok és mérőváltók
Gépészeti rendszertechnika (NGB_KV002_1)
") Gépészeti rendszertechnika (NGB_KV002_1) 2. Óra Kőrös Péter Közúti és Vasúti Járművek Tanszék Tanszéki mérnök (IS201 vagy a tanszéken) E-mail: korosp@ga.sze.hu Web: http://www.sze.hu/~korosp http://www.sze.hu/~korosp/gepeszeti_rendszertechnika/
Gépészeti rendszertechnika (NGB_KV002_1) 2. Óra Kőrös Péter Közúti és Vasúti Járművek Tanszék Tanszéki mérnök (IS201 vagy a tanszéken) E-mail: korosp@ga.sze.hu Web: http://www.sze.hu/~korosp http://www.sze.hu/~korosp/gepeszeti_rendszertechnika/
ÉRTÉKELEMZÉS A GYÁRTMÁNY- ÉS MINSÉGFEJLESZTÉSBEN
 BUDAPESTI MSZAKI FISKOLA BÁNKI DONÁT GÉPÉSZMÉRNÖKI FISKOLAI KAR GÉPGYÁRTÁSTECHNOLÓGIAI TANSZÉK HÁZIFELADAT ÉRTÉKELEMZÉS A GYÁRTMÁNY- ÉS MINSÉGFEJLESZTÉSBEN Készítette: Minségügyi Szakmérnök I.évf. hallgató
BUDAPESTI MSZAKI FISKOLA BÁNKI DONÁT GÉPÉSZMÉRNÖKI FISKOLAI KAR GÉPGYÁRTÁSTECHNOLÓGIAI TANSZÉK HÁZIFELADAT ÉRTÉKELEMZÉS A GYÁRTMÁNY- ÉS MINSÉGFEJLESZTÉSBEN Készítette: Minségügyi Szakmérnök I.évf. hallgató
Roger UT-2. Kommunikációs interfész V3.0
 ROGER UT-2 1 Roger UT-2 Kommunikációs interfész V3.0 TELEPÍTŐI KÉZIKÖNYV ROGER UT-2 2 ÁLTALÁNOS LEÍRÁS Az UT-2 elektromos átalakítóként funkcionál az RS232 és az RS485 kommunikációs interfész-ek között.
ROGER UT-2 1 Roger UT-2 Kommunikációs interfész V3.0 TELEPÍTŐI KÉZIKÖNYV ROGER UT-2 2 ÁLTALÁNOS LEÍRÁS Az UT-2 elektromos átalakítóként funkcionál az RS232 és az RS485 kommunikációs interfész-ek között.
Nyomtatóport szintillesztő 3V3
 Nyomtatóport szintillesztő 3V3 A 3V3-as verziójú illesztő kártya lehetővé teszi a nyomtató porthoz vagy az UC300-hoz való kényelmes, egyszerű hozzáférést, a jelszintek illesztett megvalósítása mellett.
Nyomtatóport szintillesztő 3V3 A 3V3-as verziójú illesztő kártya lehetővé teszi a nyomtató porthoz vagy az UC300-hoz való kényelmes, egyszerű hozzáférést, a jelszintek illesztett megvalósítása mellett.
Lendület. Lendület (impulzus): A test tömegének és sebességének szorzata. vektormennyiség: iránya a sebesség vektor iránya.
: A test tömegének és sebességének szorzata. vektormennyiség: iránya a sebesség vektor iránya.") Lendület Lendület (impulzus): A test tömegének és sebességének szorzata. vektormennyiség: iránya a sebesség vektor iránya. Lendülettétel: Az lendület erő hatására változik meg. Az eredő erő határozza meg
Lendület Lendület (impulzus): A test tömegének és sebességének szorzata. vektormennyiség: iránya a sebesség vektor iránya. Lendülettétel: Az lendület erő hatására változik meg. Az eredő erő határozza meg
1. Az automatizálás célja, és irányított berendezés, technológia blokkvázlata.
 1. Az automatizálás célja, és irányított berendezés, technológia blokkvázlata. Az automatizálás célja gép, együttműködő gépcsoport, berendezés, eszköz, műszer, részegység minél kevesebb emberi beavatkozással
1. Az automatizálás célja, és irányított berendezés, technológia blokkvázlata. Az automatizálás célja gép, együttműködő gépcsoport, berendezés, eszköz, műszer, részegység minél kevesebb emberi beavatkozással
Proporcionális hmérsékletszabályozás
 Proporcionális hmérséletszabályozás 1. A gyaorlat célja Az implzsszélesség modlált jele szoftverrel történ generálása. Hmérsélet szabályozás implementálása P szabályozóval. 2. Elméleti bevezet 2.1 A proporcionális
Proporcionális hmérséletszabályozás 1. A gyaorlat célja Az implzsszélesség modlált jele szoftverrel történ generálása. Hmérsélet szabályozás implementálása P szabályozóval. 2. Elméleti bevezet 2.1 A proporcionális
GÉPEK DINAMIKÁJA 9.gyak.hét 1. és 2. Feladat
 Széchenyi István Egyetem Alkalmazott Mechanika Műszaki Tudományi Kar Tanszék GÉPEK DINAMIKÁJA 9.gyak.hét 1. és 2. Feladat (kidolgozta: Dr. Nagy Zoltán egyetemi adjunktus) y k c S x x m x Adatok m kg c
Széchenyi István Egyetem Alkalmazott Mechanika Műszaki Tudományi Kar Tanszék GÉPEK DINAMIKÁJA 9.gyak.hét 1. és 2. Feladat (kidolgozta: Dr. Nagy Zoltán egyetemi adjunktus) y k c S x x m x Adatok m kg c
ÁLTALÁNOS JÁRMŰGÉPTAN
 ÁLTALÁNOS JÁRMŰGÉPTAN ELLENŐRZŐ KÉRDÉSEK 3. GÉPEK MECHANIKAI FOLYAMATAI 1. Definiálja a térbeli pont helyvektorát! r helyvektor előáll ortogonális (a 3 tengely egymásra merőleges) koordinátarendszer koordinátairányú
ÁLTALÁNOS JÁRMŰGÉPTAN ELLENŐRZŐ KÉRDÉSEK 3. GÉPEK MECHANIKAI FOLYAMATAI 1. Definiálja a térbeli pont helyvektorát! r helyvektor előáll ortogonális (a 3 tengely egymásra merőleges) koordinátarendszer koordinátairányú
Nyomtatóport szintillesztő
 Nyomtatóport szintillesztő Az alábbi nyomtatóport kártya lehetővé teszi a nyomtató porthoz való kényelmes, egyszerű hozzáférést, a jelszintek illesztett megvalósítása mellett. A ki- és bemenetek egyaránt
Nyomtatóport szintillesztő Az alábbi nyomtatóport kártya lehetővé teszi a nyomtató porthoz való kényelmes, egyszerű hozzáférést, a jelszintek illesztett megvalósítása mellett. A ki- és bemenetek egyaránt
HA8EV ORBITRON Programmal vezérelt Azimut/Elevációs forgató elektronika v10.0
 HA8EV ORBITRON Programmal vezérelt Azimut/Elevációs forgató elektronika v10.0 Copyright 2010 HA8EV Szőcs Péter Tartalomjegyzék: 1.) Bevezetés 3 2.) Az áramkör rövid ismertetése 3 3.) A szoftver funkcióinak
HA8EV ORBITRON Programmal vezérelt Azimut/Elevációs forgató elektronika v10.0 Copyright 2010 HA8EV Szőcs Péter Tartalomjegyzék: 1.) Bevezetés 3 2.) Az áramkör rövid ismertetése 3 3.) A szoftver funkcióinak
Számítógépes gyakorlat Irányítási rendszerek szintézise
 Számítógépes gyakorlat Irányítási rendszerek szintézise Bevezetés A gyakorlatok célja az irányítási rendszerek korszerű számítógépes vizsgálati és tervezési módszereinek bemutatása, az alkalmazáshoz szükséges
Számítógépes gyakorlat Irányítási rendszerek szintézise Bevezetés A gyakorlatok célja az irányítási rendszerek korszerű számítógépes vizsgálati és tervezési módszereinek bemutatása, az alkalmazáshoz szükséges
HSS60 ( ) típusú léptetőmotor meghajtó
 típusú léptetőmotor meghajtó") HSS60 (93.034.027) típusú léptetőmotor meghajtó Jellemzők Teljesen zárt kör Alacsony motorzaj Alacsony meghajtó és motormelegedés Gyors válaszidő, nagy motorsebesség Optikailag leválasztott ki és bemenetek
HSS60 (93.034.027) típusú léptetőmotor meghajtó Jellemzők Teljesen zárt kör Alacsony motorzaj Alacsony meghajtó és motormelegedés Gyors válaszidő, nagy motorsebesség Optikailag leválasztott ki és bemenetek
Akusztikus MEMS szenzor vizsgálata. Sós Bence JB2BP7
 Akusztikus MEMS szenzor vizsgálata Sós Bence JB2BP7 Tartalom MEMS mikrofon felépítése és típusai A PDM jel Kinyerhető információ CIC szűrő Mérési tapasztalatok. Konklúzió MEMS (MicroElectrical-Mechanical
Akusztikus MEMS szenzor vizsgálata Sós Bence JB2BP7 Tartalom MEMS mikrofon felépítése és típusai A PDM jel Kinyerhető információ CIC szűrő Mérési tapasztalatok. Konklúzió MEMS (MicroElectrical-Mechanical
Elektronika Előadás. Modulátorok, demodulátorok, lock-in erősítők
 Elektronika 2 10. Előadás Modulátorok, demodulátorok, lock-in erősítők Irodalom - Megyeri János: Analóg elektronika, Tankönyvkiadó, 1990 - U. Tiecze, Ch. Schenk: Analóg és digitális áramkörök, Műszaki
Elektronika 2 10. Előadás Modulátorok, demodulátorok, lock-in erősítők Irodalom - Megyeri János: Analóg elektronika, Tankönyvkiadó, 1990 - U. Tiecze, Ch. Schenk: Analóg és digitális áramkörök, Műszaki
Négyszög - Háromszög Oszcillátor Mérése Mérési Útmutató
 ÓBUDAI EGYETEM Kandó Kálmán Villamosmérnöki Kar Híradástechnika Intézet Négyszög - Háromszög Oszcillátor Mérése Mérési Útmutató A mérést végezte: Neptun kód: A mérés időpontja: A méréshez szükséges eszközök:
ÓBUDAI EGYETEM Kandó Kálmán Villamosmérnöki Kar Híradástechnika Intézet Négyszög - Háromszög Oszcillátor Mérése Mérési Útmutató A mérést végezte: Neptun kód: A mérés időpontja: A méréshez szükséges eszközök:
DDC rendszerelemek, DIALOG-II család
 DDC rendszerelemek, DIALOG-II család KIVITEL ALKALMAZÁS BEKÖTÉS A SYS-100 L típusú készülék egyszerű légkezelő szabályzására kifejlesztet integráló szabályzó. Egy kalorifert tartalmazó légtechnikákhoz
DDC rendszerelemek, DIALOG-II család KIVITEL ALKALMAZÁS BEKÖTÉS A SYS-100 L típusú készülék egyszerű légkezelő szabályzására kifejlesztet integráló szabályzó. Egy kalorifert tartalmazó légtechnikákhoz
PWM elve, mikroszervó motor vezérlése MiniRISC processzoron
 PWM elve, mikroszervó motor vezérlése MiniRISC processzoron F1. A mikroprocesszorok, mint digitális eszközök, ritkán rendelkeznek közvetlen analóg kimeneti jelet biztosító perifériával, tehát valódi, minőségi
PWM elve, mikroszervó motor vezérlése MiniRISC processzoron F1. A mikroprocesszorok, mint digitális eszközök, ritkán rendelkeznek közvetlen analóg kimeneti jelet biztosító perifériával, tehát valódi, minőségi
Lineáris és kapcsoló üzemű feszültség növelő és csökkentő áramkörök
 Lineáris és kapcsoló üzemű feszültség növelő és csökkentő áramkörök Buck, boost konverter Készítette: Támcsu Péter, 2016.10.09, Debrecen Felhasznált dokumentum : Losonczi Lajos - Analog Áramkörök 7 Feszültség
Lineáris és kapcsoló üzemű feszültség növelő és csökkentő áramkörök Buck, boost konverter Készítette: Támcsu Péter, 2016.10.09, Debrecen Felhasznált dokumentum : Losonczi Lajos - Analog Áramkörök 7 Feszültség
Fordulatszám szabályozott egyenáramú szervohajtás vizsgálata
 2011.03.24. Fordulatszám szabályozott egyenáramú szervohajtás vizsgálata BMEVIVEM264 Dr. Számel László Budapesti Műszaki és Gazdaságtudományi Egyetem Villamos Energetika Tanszék Készült a Társadalmi Megújulás
2011.03.24. Fordulatszám szabályozott egyenáramú szervohajtás vizsgálata BMEVIVEM264 Dr. Számel László Budapesti Műszaki és Gazdaságtudományi Egyetem Villamos Energetika Tanszék Készült a Társadalmi Megújulás
MOTOR HAJTÁS Nagyfeszültségű megszakító
 Forradalom a megszakító technológiában MOTOR HAJTÁS Nagyfeszültségű megszakító ABB HV Products - Page 1 Mi az a Motor Hajtás? ABB HV Products - Page 2 Energia Átvitel Energia Kioldás Energia Tárolás Energia
Forradalom a megszakító technológiában MOTOR HAJTÁS Nagyfeszültségű megszakító ABB HV Products - Page 1 Mi az a Motor Hajtás? ABB HV Products - Page 2 Energia Átvitel Energia Kioldás Energia Tárolás Energia
Méréstechnika. Rezgésmérés. Készítette: Ángyán Béla. Iszak Gábor. Seidl Áron. Veszprém. [Ide írhatja a szöveget] oldal 1
![Méréstechnika. Rezgésmérés. Készítette: Ángyán Béla. Iszak Gábor. Seidl Áron. Veszprém. [Ide írhatja a szöveget] oldal 1](/thumbs/45/23262384.jpg "Méréstechnika. Rezgésmérés. Készítette: Ángyán Béla. Iszak Gábor. Seidl Áron. Veszprém. [Ide írhatja a szöveget] oldal 1") Méréstechnika Rezgésmérés Készítette: Ángyán Béla Iszak Gábor Seidl Áron Veszprém 2014 [Ide írhatja a szöveget] oldal 1 A rezgésekkel kapcsolatos alapfogalmak A rezgés a Magyar Értelmező Szótár megfogalmazása
Méréstechnika Rezgésmérés Készítette: Ángyán Béla Iszak Gábor Seidl Áron Veszprém 2014 [Ide írhatja a szöveget] oldal 1 A rezgésekkel kapcsolatos alapfogalmak A rezgés a Magyar Értelmező Szótár megfogalmazása
Szakképesítés: 54 523 01 Automatikai technikus Szóbeli vizsgatevékenység A vizsgafeladat megnevezése: Irányítástechnikai alapok, gyártórendszerek
 A vizsgafeladat ismertetése: A szóbeli vizsgatevékenység központilag összeállított vizsgakérdései a IV. Szakmai követelmények fejezetben megadott 10003-12 Irányítástechnikai alapok és a 10002-12 Ipari
A vizsgafeladat ismertetése: A szóbeli vizsgatevékenység központilag összeállított vizsgakérdései a IV. Szakmai követelmények fejezetben megadott 10003-12 Irányítástechnikai alapok és a 10002-12 Ipari
Átmeneti jelenségek egyenergiatárolós áramkörökben
 TARTALOM JEGYZÉK 1. Egyenergiatárolós áramkörök átmeneti függvényeinek meghatározása Példák az egyenergiatárolós áramkörök átmeneti függvényeinek meghatározására 1.1 feladat 1.2 feladat 1.3 feladat 1.4
TARTALOM JEGYZÉK 1. Egyenergiatárolós áramkörök átmeneti függvényeinek meghatározása Példák az egyenergiatárolós áramkörök átmeneti függvényeinek meghatározására 1.1 feladat 1.2 feladat 1.3 feladat 1.4
SYS700-PLM Power Line Monitor modul DDC rendszerelemek, DIALOG-III család
 DDC rendszerelemek, DIALOG-III család KIVITEL ALKALMAZÁS A az energiaellátás minőségi jellemzőinek mérésére szolgáló szabadon programozható készülék. Épületfelügyeleti rendszerben (BMS), valamint önállóan
DDC rendszerelemek, DIALOG-III család KIVITEL ALKALMAZÁS A az energiaellátás minőségi jellemzőinek mérésére szolgáló szabadon programozható készülék. Épületfelügyeleti rendszerben (BMS), valamint önállóan
Tárgymutató. dinamika, 5 dinamikai rendszer, 4 végtelen sok állapotú, dinamikai törvény, 5 dinamikai törvények, 12 divergencia,
 Tárgymutató állapottér, 3 10, 107 általánosított impulzusok, 143 147 általánosított koordináták, 143 147 áramlás, 194 197 Arisztotelész mozgástörvényei, 71 77 bázisvektorok, 30 centrifugális erő, 142 ciklikus
Tárgymutató állapottér, 3 10, 107 általánosított impulzusok, 143 147 általánosított koordináták, 143 147 áramlás, 194 197 Arisztotelész mozgástörvényei, 71 77 bázisvektorok, 30 centrifugális erő, 142 ciklikus
Programozó- készülék Kezelőkozol RT óra (pl. PC) Digitális bemenetek ROM memória Digitális kimenetek RAM memória Analóg bemenet Analóg kimenet
 Digitális bemenetek ROM memória Digitális kimenetek RAM memória Analóg bemenet Analóg kimenet") 2. ZH A csoport 1. Hogyan adható meg egy digitális műszer pontossága? (3p) Digitális műszereknél a pontosságot két adattal lehet megadni: Az osztályjel ±%-os értékével, és a ± digit értékkel (jellemző
2. ZH A csoport 1. Hogyan adható meg egy digitális műszer pontossága? (3p) Digitális műszereknél a pontosságot két adattal lehet megadni: Az osztályjel ±%-os értékével, és a ± digit értékkel (jellemző
A 27/2012 (VIII. 27.) NGM rendelet szakmai és vizsgakövetelménye alapján.
 NGM rendelet szakmai és vizsgakövetelménye alapján.") A 27/202 (VIII. 27.) NGM rendelet szakmai és vizsgakövetelménye alapján. Szakképesítés, azonosító száma és megnevezése 54 523 04 Mechatronikai technikus Tájékoztató A vizsgázó az első lapra írja fel a
A 27/202 (VIII. 27.) NGM rendelet szakmai és vizsgakövetelménye alapján. Szakképesítés, azonosító száma és megnevezése 54 523 04 Mechatronikai technikus Tájékoztató A vizsgázó az első lapra írja fel a
Osztályozó, javító vizsga 9. évfolyam gimnázium. Írásbeli vizsgarész ELSŐ RÉSZ
 Írásbeli vizsgarész ELSŐ RÉSZ 1. Egy téglalap alakú háztömb egyik sarkából elindulva 80 m, 150 m, 80 m utat tettünk meg az egyes házoldalak mentén, míg a szomszédos sarokig értünk. Mekkora az elmozdulásunk?
Írásbeli vizsgarész ELSŐ RÉSZ 1. Egy téglalap alakú háztömb egyik sarkából elindulva 80 m, 150 m, 80 m utat tettünk meg az egyes házoldalak mentén, míg a szomszédos sarokig értünk. Mekkora az elmozdulásunk?
Teljesítményelektronika szabályozása. Összeállította dr. Blága Csaba egyetemi docens
 Teljesítményelektronika szabályozása Összeállította dr. Blága Csaba egyetemi docens Szakirodalom 1. Ferenczi Ödön, Teljesítményszabályozó áramkörök, Műszaki Könyvkiadó, Budapest, 1981. 2. Ipsits Imre,
Teljesítményelektronika szabályozása Összeállította dr. Blága Csaba egyetemi docens Szakirodalom 1. Ferenczi Ödön, Teljesítményszabályozó áramkörök, Műszaki Könyvkiadó, Budapest, 1981. 2. Ipsits Imre,
1 csűrő 1 csűrő 2 magassági 2 magassági 3 gáz 3 gáz 4 oldalkormány 4 oldalkormány 5 Robot üzemmód 5 csűrő
 RC csatlakozók A csatlakozók kiosztása. Figyelem, a Gnd (föld, fekete) tüskéi felül vannak! RC input RC output 1 2 3 4 5 1 2 3 4 5 SP Gnd 5V Signal A robot 5 tel (RC input) és 5 tel (RC output) rendelkezik.
RC csatlakozók A csatlakozók kiosztása. Figyelem, a Gnd (föld, fekete) tüskéi felül vannak! RC input RC output 1 2 3 4 5 1 2 3 4 5 SP Gnd 5V Signal A robot 5 tel (RC input) és 5 tel (RC output) rendelkezik.
1. Irányítástechnika. Készítette: Fecser Nikolett. 2. Ipari elektronika. Készítette: Horváth Lászó
 A mechatronikai technikus képzés átvilágítására és fejlesztésére irányuló projekt eredményeképp az egyes tantárgyakhoz új, disszeminációra alakalmas tanmeneteket dolgoztunk ki. 1. Irányítástechnika. Készítette:
A mechatronikai technikus képzés átvilágítására és fejlesztésére irányuló projekt eredményeképp az egyes tantárgyakhoz új, disszeminációra alakalmas tanmeneteket dolgoztunk ki. 1. Irányítástechnika. Készítette:
MAGYAR KERESKEDELMI ÉS IPARKAMARA. Országos Szakmai Tanulmányi Verseny. Elődöntő KOMPLEX ÍRÁSBELI FELADATSOR
 MAGYAR KERESKEDELMI ÉS IPARKAMARA Országos Szakmai Tanulmányi Verseny Elődöntő KOMPLEX ÍRÁSBELI FELADATSOR Szakképesítés: SZVK rendelet száma: Komplex írásbeli: Számolási, áramköri, tervezési feladatok
MAGYAR KERESKEDELMI ÉS IPARKAMARA Országos Szakmai Tanulmányi Verseny Elődöntő KOMPLEX ÍRÁSBELI FELADATSOR Szakképesítés: SZVK rendelet száma: Komplex írásbeli: Számolási, áramköri, tervezési feladatok
I. A DIGITÁLIS ÁRAMKÖRÖK ELMÉLETI ALAPJAI
 I. A DIGITÁLIS ÁRAMKÖRÖK ELMÉLETI ALAPJAI 1 A digitális áramkörökre is érvényesek a villamosságtanból ismert Ohm törvény és a Kirchhoff törvények, de az elemzés és a tervezés rendszerint nem ezekre épül.
I. A DIGITÁLIS ÁRAMKÖRÖK ELMÉLETI ALAPJAI 1 A digitális áramkörökre is érvényesek a villamosságtanból ismert Ohm törvény és a Kirchhoff törvények, de az elemzés és a tervezés rendszerint nem ezekre épül.
9. Laboratóriumi gyakorlat NYOMÁSÉRZÉKELŐK
 9. Laboratóriumi gyakorlat NYOMÁSÉRZÉKELŐK 1.A gyakorlat célja Az MPX12DP piezorezisztiv differenciális nyomásérzékelő tanulmányozása. A nyomás feszültség p=f(u) karakterisztika megrajzolása. 2. Elméleti
9. Laboratóriumi gyakorlat NYOMÁSÉRZÉKELŐK 1.A gyakorlat célja Az MPX12DP piezorezisztiv differenciális nyomásérzékelő tanulmányozása. A nyomás feszültség p=f(u) karakterisztika megrajzolása. 2. Elméleti