Sensor Network-Based Countersniper System
|
|
|
- Gyöngyi Pintérné
- 8 évvel ezelőtt
- Látták:
Átírás
1 Sensor Network-Based Countersniper System Simon Gyula, Maróti Miklós, Lédeczi Ákos, Balogh György, Branislav Kusy, Nádas András, Pap Gábor, Sallai János, Ken Frampton Elıadó: Kincses Zoltán

2 Bevezetés Számost lövész lokalizációs rendszert fejlesztettek ki az elmúlt évtizedben Csak néhány használható városi környezetben szegényes lefedettség az épületek árnyékoló hatása multi-path hatás Viper rendszer infravörös kamera a torkolattőz detektálására mikrofon a torkolati légnyomás alapú távolság becslésre a torkolattőz elfojtása esetén a rendszer nem használható relatíve nagy hibás riasztási arány Más megközelítések a repülı golyó hı-képét mérik az örvlövész megvilágítása lézerrel és a visszaverıdések mérése azonban egyik megoldás sem biztosít átfogó megoldást a problémára

3 A legnyilvánvalóbb jelenség amit egy hagyományos fegyver tüzelés közben generál, a légnyomás A torkolati légnyomás egy hangos jellegzetes zaj, ami a torkolattól indul és hangsebességgel egy gömb mentén terjed Egy tipikus puska hangsebességgel lövi ki a lövedéket, amely ezáltal akusztikus lökéseket generál a röppályája mentén Ezeket a lökéshullámokat fel lehet használni a lövedék röppályájának pontos meghatározásához

4 A torkolati légnyomás egy gömb mentén terjed hangsebességgel (v s ) a torkolattól (A) a szenzorig (S) A lökéshullám a lövedék röppályájának minden pontjában generálódik Egy csúcs formájú hullámfrontot generál feltéve hogy a lövedék sebessége konstans (v B ) Az X pontban generált lökéshullám eléri az S pontban lévı szenzort A lökéshullám-kúp szöge a lövedék Mach (M) száma alapján határozható meg
 száma")
5 A kereskedelmi akusztikus orvlövész detektáló rendszerek ezt a jelenséget használják Mérik a Time of Arrival-t (TOA) és a lökéshullám néhány jellemzıjét és/vagy a torkolati légnyomás TOA-jét A BBN Bullet Ears rendszere két kis mikrofon tömböt alkalmaz (kaliber, sebesség, lövedék röppálya) irány és távolság pontossága: 1.2 o -3 o és 1,6% A francia Pilar rendszer két mikrofon tömböt alkalmaz irány és távolság pontosság: ±2 o és ±10% A fenti rendszerek hátránya centralizált (ha néhány szenzor nem detektálja a jelet akkor pontatlan lesz az eredmény) fontos a látószög a lövedék röppályája ne legyen takarásban visszhang

6 Megfelelı megoldást kínálhat sok szenzor együttes használata jó lefedettség nagy valószínőségő jeldetektálás az egyes szenzorok mérései lehetnek pontatlanabbak ezek a kevésbé kifinomult szenzorok kisebbek lehetnek a pontosság mellet a rendszer robosztussága is növelhetı

7 Ezt alapul véve jött létre a PinPtr rendszer ad-hoc szenzorhálózat, olcsó szenzorokból a szenzorok szinkronizálják az óráikat, ön-lokalizációt hajtanak végre, majd várják az akusztikus lökéshullámokat detektálják a torkolati légnyomást, akusztikus lökéshullámot, ás mérik a TOA-t TOA továbbítása a base station felé, ahol megtörténik a lövész lokalizáció a rendszer a valóságban is többször tesztelve lett

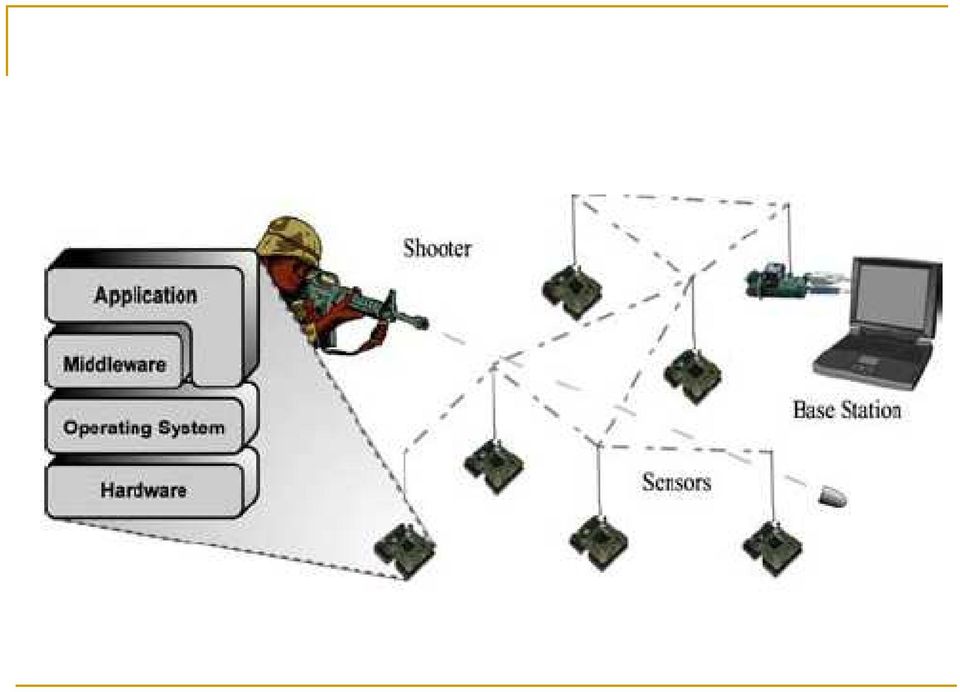
8 Rendszer architektúra Hagyományos rétegelt architektúra A hardver réteg Mica2 mote 7.3 MHz 8-bit Atmel ATmega 128L 433 MHz, 38.4 kbps Chipcon CC1000 rádió adóvevı 4 kb RAM 128 kb flash szenzorkártya (foto-, hımérsékletszenzor, páratartalom-, nyomás-, gyorsulásmérı, magnetométer, mikrofon) Operációs rendszer réteg (TinyOS) eseményvezérelt feladat ütemezés rádió kommunikáció óra és idızítés kezelés ADC, I/O és EEPROM absztrakciók energia menedzsment
 Operációs rendszer réteg (TinyOS) eseményvezérelt")
9 Middleware réteg idı szinkronizáció FTSP idı szinkronizáció (pontosabb idızítés, nagyobb pontosság, kisebb érzékenység a multi-path hatásra) üzenet route-olás és adat aggregáció a kis multi-hop késleltetés elérésére az ütközések kiküszöbölésére (a lövéskor minden szenzor egyszerre adna) ön-lokalizáció szenzor pozíció biztosítása az adat fúziós algoritmusnak
 ön-lokalizáció szenzor pozíció biztosítása az adat fúziós")
10
11 A Mica2 mote-ok a fenti többcélú akusztikus szenzor kártyához csatlakoznak Három független akusztikus csatorna minden csatornához mikrofon, erısítı, állítható erısítés, ADC Xilinx Spartan-II FPGA jelfeldolgozás osztályozó algoritmus az akusztikus események megkülönböztetésére (torkolati légnyomás, lökéshullám, egyik sem) TOA mérése

12 Idı szinkronizáció Az RBS megközelítés csak a vevı oldalon végez idıbélyegzést a küldı oldali véletlen késleltetések kiküszöbölése pontosság 29.1 us single-hop esetben A TPSN megközelítés eltávolítja a hozzáférési késleltetést terjedési késleltetést pontosság 16.9 us Nem veszik figyelembe kódolási, dekódolási idıket megszakítás kezelési idıket

13 Az FTSP növeli az RBS és a TPSN pontosságát, az elküldött üzenetek többszöri idıbélyegzésével kevesebb kommunikációs overhead multi-hop esetben minden node egy root node-hoz szinkronizál pontosság 1,4 us single-hop esetben 1,6 us multi-hop esetben hop-onként broadcast hierarchia

14 Üzenet route-olás A rendszer pontosságának biztosítása érdekében a TOA üzeneteket maximális kézbesítési aránnyal kell továbbítani A mérések a lövész és a golyó pályagörbéje körüli területrıl származnak és azonos idıben továbbítódnak Gyors gradiens alapú best effort converge-cast protokoll alkalmazása beépített adat aggregációval adatcsomagok route-olása egy kiválasztott node-tól a root-ig egy node 0-szor, 1-szer, vagy többször küld újra egy csomagot amíg vissza nem kapja egy a root-hoz közelebbi node-tól a protokoll emlékszik minden egyes adat csomagra egy bizonyos ideig

15 Szenzor lokalizáció Az ön-lokalizációs algoritmus node párok közötti akusztikus távolságmérésen alapszik Az itt alkalmazott eljárás a Mica2 mote-okon található mikrofonra és csipogóra alapszik a forrás node egy rádió és többszörös chirp -et küld a cél node mintavételezi a mikrofont és összeadja a mintákat sáváteresztı szőrıt és csúcsdetektálást alkalmaz hogy meghatározza a chirp kezdetét a távolság végül a chirp TOF-ja alapján határozható meg Slot negációs algoritmus alkalmazása az akusztikus távolság mérés ütemezésére Pontosság: 11 cm Legnagyobb hiba: 25 cm

16 A pontosság megfelelı az orvlövész detektáló rendszernek azonban 4 szomszéd szükséges 10 méteres körzetben a pontos 3D-s lokalizációhoz a csipogó megnöveli a szenzorkártya méretét és a fogyasztását a hallható frekvencia könnyebben felfedezhetıvé teszi a moteokat A fenti problémás kiküszöbölésre alkalmazható passzív akusztikus szenzor lokalizáció A lokalizáció nem egyszeri feladat a node elmozdulhat, új node kerülhet a rendszerbe újraszámítás szükséges gyorsulásmérı jelzései alapján a fúziós algoritmus alapján

17 Jel detektálás Az akusztikus jel detektáláshoz egy akusztikus kártyát használtak 3 független csatornával A kezdeti terv detektálni a TDOA-t és az AOA-t mind a lökéshullám, mind pedig a torkolati hullám esetében A szög detektáláshoz precíziós magnetométer kell Ezért az egy csatornás TOA mérés és a base station-on történı szenzor adatfúzió mellet döntöttek

18 A jelfeldolgozást egy Xilinx Spartan-II FPGA végezte Az akusztikus jel tömörítése a ZC kódolással Az akusztikus esemény TOA-jét az FPGA belsı órája alapján határozták meg és tárolták el A Mica2 mote kiolvasta ezeket az adatokat, és idı szinkronizációt végzett az akusztikus kártyával A jeldetektáló algoritmus robosztus a training események 100%-át felismerte több mint 90%-át az egyéb felvett lövéseknek nehéz hibás jelzést kicsikarni, a mikrofon megütése nélkül néhány kártya érzékeny volt a szélre, de ez kiküszöbölhetı volt a mikrofonok érzékenységének állításával

19 Az akusztikus jel zero-crossing (ZC kódolása) A vékony vonal az eredeti jel A szaggatott vonalak a komparálási szintek A vastag vonal a kódolt jel Jelölések T az indulási idı, Mm az amplitúdó, L a hossz, т a felfutási idı

20 Szenzor fúzió Kétlépes technika alkalmazása TDOA meghatározás hely meghatározás a szükséges sávszélesség igény elfogadható Mivel egy szenzor-pár adatai egy hyperboloid felületet adnak, négy mérés elegendı a 3D-s pozíció meghatározásához hiba a detektálásban, a lokalizációban, és az idı szinkronizációban több mérés alkalmazásával kijavíthatóak ezek a hibák A konvencionális eljárások jól mőködnek a zajos helyeken, de rosszul ha nincs direkt rálátása a szenzoroknak A városi terülteken a szenzor adatok 10-50%-a hibás

21 Ennek megoldása érdekében fel kell használni a lökéshullámok és a torkolati légnyomás TOA méréseit Ezek alapján a szenzorok pozíciója egy 4 dimenziós konzisztencia függvénnyel definiálható Gyors keresı eljárással a maximum meghatározható intervallum aritmetikán alapuló általánosított Bisection eljárás A maximum lesz a lövész becsült pozíciója A konzisztencia függvény automatikusan osztályozza és kiküszöböli a hibás méréseket és a multi-path hatást A konzisztencia függvényben a többszörös lövés többszörös lokális maximumként jelentkezik
22 Konzisztencia függvény ahol
23 Eredmények A rendszer a McKenna MOUT tréning központban lett tesztelve A rendszer FTSP-t és gradiens alapú converge-cast eljárást használt A tesztben 56 mote-ot használtak A hiba meghatározására 20 különbözı elıre meghatározott lövész pozíciót használtak 171-szer lıttek a kísérlet alatt 101 vak tölténnyel 70 SRTA-val nem volt a két eset között különbség
24
25
26 Hibaforrások
27 Szenzor sőrőség Detekciós arány szemben a használt szenzorok számával Lokalizációs pontosság szemben a használt szenzorok számával
28 Szenzor fúzió A lokalizációs hiba hisztogrammja a fúziós és az analitikus megoldások esetén Az átlagos lokalizációs hiba szemben a rossz és a jó mérésekkel
29 Idı szinkronizáció
30 Jövıbeli tervek Energia menedzsment Többszörös lövések kezelése Folyamatos szinkronizáció helyett post-facto szinkronizáció Dinamikus passzív re-lokalizáció CONOPS konvoj útvonalának védelme felderítı egységek védelme
31 Köszönöm a figyelmet
Szenzorhálózat alapú mesterlövész detektáló rendszer. Előadó: Kincses Zoltán
 Szenzorhálózat alapú mesterlövész detektáló rendszer Előadó: Kincses Zoltán Mesterlövész detektáló rendszerek Csak néhány használható városi környezetben szegényes lefedettség, épületek árnyékoló hatása
Szenzorhálózat alapú mesterlövész detektáló rendszer Előadó: Kincses Zoltán Mesterlövész detektáló rendszerek Csak néhány használható városi környezetben szegényes lefedettség, épületek árnyékoló hatása
Acoustic Ranging in Resource- Constrained Sensor Networks
 Acoustic Ranging in Resource- Constrained Sensor Networks Sallai János, Balogh György, Maróti Miklós, Lédeczi Ákos, Branislav Kusy Elıadó: Kincses Zoltán Bevezetés A node-ok földrajzi helymeghatározása
Acoustic Ranging in Resource- Constrained Sensor Networks Sallai János, Balogh György, Maróti Miklós, Lédeczi Ákos, Branislav Kusy Elıadó: Kincses Zoltán Bevezetés A node-ok földrajzi helymeghatározása
Akusztikus távolság meghatározás a vezeték nélküli szenzor hálózatokban. Előadó: Kincses Zoltán
 Akusztikus távolság meghatározás a vezeték nélküli szenzor hálózatokban Előadó: Kincses Zoltán Bevezetés A mote-ok földrajzi helymeghatározása fontos helymeghatározó rendszerekben érzékelő és jelző alkalmazásokban
Akusztikus távolság meghatározás a vezeték nélküli szenzor hálózatokban Előadó: Kincses Zoltán Bevezetés A mote-ok földrajzi helymeghatározása fontos helymeghatározó rendszerekben érzékelő és jelző alkalmazásokban
The Flooding Time Synchronization Protocol
 The Flooding Time Synchronization Protocol Célok: FTSP Alacsony sávszélesség overhead Node és kapcsolati hibák kiküszöbölése Periodikus flooding (sync message) Implicit dinamikus topológia frissítés MAC-layer
The Flooding Time Synchronization Protocol Célok: FTSP Alacsony sávszélesség overhead Node és kapcsolati hibák kiküszöbölése Periodikus flooding (sync message) Implicit dinamikus topológia frissítés MAC-layer
An Analysis of Large Scale Habitat Monitoring Application
 An Analysis of Large Scale Habitat Monitoring Application Robert Szewczyk, Alan Mainwaring, Joseph Polastre, John Anderson and David Culler Elıadó: Kincses Zoltán Bevezetés A WSN gyakori alkalmazási területe
An Analysis of Large Scale Habitat Monitoring Application Robert Szewczyk, Alan Mainwaring, Joseph Polastre, John Anderson and David Culler Elıadó: Kincses Zoltán Bevezetés A WSN gyakori alkalmazási területe
A Component-Base Architechture for Power-Efficient Media Access Control in Wireless Sensor Networks
 A Component-Base Architechture for Power-Efficient Media Access Control in Wireless Sensor Networks MAC=Media Access Control, Közeghozzáférés vezérlés Lényegében azt irányítja, melyik mote mikor adjon,
A Component-Base Architechture for Power-Efficient Media Access Control in Wireless Sensor Networks MAC=Media Access Control, Közeghozzáférés vezérlés Lényegében azt irányítja, melyik mote mikor adjon,
Fine-Grained Network Time Synchronization using Reference Broadcast
 Fine-Grained Network Time Synchronization using Reference Broadcast Ofszet Az indítás óta eltelt idıt mérik Az ofszet változása: skew Az órák sebességének különbsége Oka: Az óra az oszcillátor pontatlanságát
Fine-Grained Network Time Synchronization using Reference Broadcast Ofszet Az indítás óta eltelt idıt mérik Az ofszet változása: skew Az órák sebességének különbsége Oka: Az óra az oszcillátor pontatlanságát
Akusztikus MEMS szenzor vizsgálata. Sós Bence JB2BP7
 Akusztikus MEMS szenzor vizsgálata Sós Bence JB2BP7 Tartalom MEMS mikrofon felépítése és típusai A PDM jel Kinyerhető információ CIC szűrő Mérési tapasztalatok. Konklúzió MEMS (MicroElectrical-Mechanical
Akusztikus MEMS szenzor vizsgálata Sós Bence JB2BP7 Tartalom MEMS mikrofon felépítése és típusai A PDM jel Kinyerhető információ CIC szűrő Mérési tapasztalatok. Konklúzió MEMS (MicroElectrical-Mechanical
Nagyméretű élőhely megfigyelő rendszer analízise. Előadó: Kincses Zoltán
 Nagyméretű élőhely megfigyelő rendszer analízise Előadó: Kincses Zoltán Sense-and-send alkalmazások Mikroklíma monitorozás Növény élettan Mezőgazdaság Strukturális ellenőrzés A vezeték nélküli szenzorhálózatok
Nagyméretű élőhely megfigyelő rendszer analízise Előadó: Kincses Zoltán Sense-and-send alkalmazások Mikroklíma monitorozás Növény élettan Mezőgazdaság Strukturális ellenőrzés A vezeték nélküli szenzorhálózatok
Hálózati réteg. WSN topológia. Útvonalválasztás.
 Hálózati réteg WSN topológia. Útvonalválasztás. Tartalom Hálózati réteg WSN topológia Útvonalválasztás 2015. tavasz Szenzorhálózatok és alkalmazásaik (VITMMA09) - Okos város villamosmérnöki MSc mellékspecializáció,
Hálózati réteg WSN topológia. Útvonalválasztás. Tartalom Hálózati réteg WSN topológia Útvonalválasztás 2015. tavasz Szenzorhálózatok és alkalmazásaik (VITMMA09) - Okos város villamosmérnöki MSc mellékspecializáció,
Programozható vezérlő rendszerek KOMMUNIKÁCIÓS HÁLÓZATOK 2.
 KOMMUNIKÁCIÓS HÁLÓZATOK 2. CAN busz - Autóipari alkalmazásokhoz fejlesztették a 80-as években - Elsőként a BOSCH vállalat fejlesztette - 1993-ban szabvány (ISO 11898: 1993) - Később fokozatosan az iparban
KOMMUNIKÁCIÓS HÁLÓZATOK 2. CAN busz - Autóipari alkalmazásokhoz fejlesztették a 80-as években - Elsőként a BOSCH vállalat fejlesztette - 1993-ban szabvány (ISO 11898: 1993) - Később fokozatosan az iparban
Hangterjedés szabad térben
 Hangterjeés szaba térben Bevezetés Hangszint általában csökken a terjeés során. Okai: geometriai, elnyelőés, fölfelület hatása, növényzet és épületek. Ha a hangterjeés több mint 100 méteren történik, a
Hangterjeés szaba térben Bevezetés Hangszint általában csökken a terjeés során. Okai: geometriai, elnyelőés, fölfelület hatása, növényzet és épületek. Ha a hangterjeés több mint 100 méteren történik, a
Harmadik-generációs bázisállomások szinkronizációja
 Harmadik-generációs bázisállomások szinkronizációja 16. Távközlési és Informatikai Hálózatok Szeminárium és Kiállítás Zorkóczy Zoltán 1 Tartalom A távközlés szinkronizáció definíciója Az RNC és Node-B
Harmadik-generációs bázisállomások szinkronizációja 16. Távközlési és Informatikai Hálózatok Szeminárium és Kiállítás Zorkóczy Zoltán 1 Tartalom A távközlés szinkronizáció definíciója Az RNC és Node-B
SZENZORFÚZIÓS ELJÁRÁSOK KIDOLGOZÁSA AUTONÓM JÁRMŰVEK PÁLYAKÖVETÉSÉRE ÉS IRÁNYÍTÁSÁRA
 infokommunikációs technológiák SZENZORFÚZIÓS ELJÁRÁSOK KIDOLGOZÁSA AUTONÓM JÁRMŰVEK PÁLYAKÖVETÉSÉRE ÉS IRÁNYÍTÁSÁRA BEVEZETŐ A KUTATÁS CÉLJA Autonóm járművek és robotok esetén elsődleges feladat a robotok
infokommunikációs technológiák SZENZORFÚZIÓS ELJÁRÁSOK KIDOLGOZÁSA AUTONÓM JÁRMŰVEK PÁLYAKÖVETÉSÉRE ÉS IRÁNYÍTÁSÁRA BEVEZETŐ A KUTATÁS CÉLJA Autonóm járművek és robotok esetén elsődleges feladat a robotok
Szenzorkommunikációs lehetőségek az IoT világában. Dr. Fehér Gábor BME Távközlési és Médiainformatikai Egyetem
 Szenzorkommunikációs lehetőségek az IoT világában Dr. Fehér Gábor BME Távközlési és Médiainformatikai Egyetem Szenzorkommunikációs lehetőségek az IoT világában IoT és szenzrok Szenzorkommunikáció?= IoT
Szenzorkommunikációs lehetőségek az IoT világában Dr. Fehér Gábor BME Távközlési és Médiainformatikai Egyetem Szenzorkommunikációs lehetőségek az IoT világában IoT és szenzrok Szenzorkommunikáció?= IoT
MSP430 programozás Energia környezetben. Kitekintés, további lehetőségek
 MSP430 programozás Energia környezetben Kitekintés, további lehetőségek 1 Még nem merítettünk ki minden lehetőséget Kapacitív érzékelés (nyomógombok vagy csúszka) Az Energia egyelőre nem támogatja, csak
MSP430 programozás Energia környezetben Kitekintés, további lehetőségek 1 Még nem merítettünk ki minden lehetőséget Kapacitív érzékelés (nyomógombok vagy csúszka) Az Energia egyelőre nem támogatja, csak
1/9. Sunell IP kamerák webes felületének használati útmutatója. Élő kép (Live Video)
") felületének használati útmutatója Élő kép (Live Video) Belépés után rögtön látható a kamera élő képe, váltható a stream minősége (a beállításoktól függően), valamint a képre jobb kattintással előhozható
felületének használati útmutatója Élő kép (Live Video) Belépés után rögtön látható a kamera élő képe, váltható a stream minősége (a beállításoktól függően), valamint a képre jobb kattintással előhozható
Aktív zajcsökkentő rendszerek megvalósítása szenzorhálózattal
 Aktív zajcsökkentő rendszerek megvalósítása szenzorhálózattal Lajkó László, Orosz György Konzulens: Dr. Sujbert László Méréstechnika és Információs Rendszerek Tanszék Önálló laboratórium beszámoló 2005.
Aktív zajcsökkentő rendszerek megvalósítása szenzorhálózattal Lajkó László, Orosz György Konzulens: Dr. Sujbert László Méréstechnika és Információs Rendszerek Tanszék Önálló laboratórium beszámoló 2005.
T E R M É K T Á J É K O Z TAT Ó
 T E R M É K T Á J É K O Z TAT Ó ÚJ!!! SeCorr 08 korrrelátor A legújabb DSP technikával ellátott számítógépes támogatással rendelkező korrelátor a hibahelyek megtalálásához. 1 MI A KORRELÁCIÓ? A korreláció
T E R M É K T Á J É K O Z TAT Ó ÚJ!!! SeCorr 08 korrrelátor A legújabb DSP technikával ellátott számítógépes támogatással rendelkező korrelátor a hibahelyek megtalálásához. 1 MI A KORRELÁCIÓ? A korreláció
Intelligens Közlekedési Rendszerek 2
 Intelligens Közlekedési Rendszerek 2 Máté Miklós 2016 Október 11 1 / 14 Szenzor (érzékelő): mérés, detektálás Mérés elmélet emlékeztető Jó mérőműszer tulajdonságai Érzékeny a mérendő tulajdonságra Érzéketlen
Intelligens Közlekedési Rendszerek 2 Máté Miklós 2016 Október 11 1 / 14 Szenzor (érzékelő): mérés, detektálás Mérés elmélet emlékeztető Jó mérőműszer tulajdonságai Érzékeny a mérendő tulajdonságra Érzéketlen
Szenzorhálózatok Szenzor MAC (folyt.), Hálózati réteg, topológia, útvonalválasztás ( )
, Hálózati réteg, topológia, útvonalválasztás ( )") Szenzorhálózatok Szenzor MAC (folyt.), Hálózati réteg, topológia, útvonalválasztás (2011.10.26) Vidács Attila Távközlési és Médiainformatikai Tanszék I.B.228, T:19-25, vidacs@tmit.bme.hu Közeghozzáférési
Szenzorhálózatok Szenzor MAC (folyt.), Hálózati réteg, topológia, útvonalválasztás (2011.10.26) Vidács Attila Távközlési és Médiainformatikai Tanszék I.B.228, T:19-25, vidacs@tmit.bme.hu Közeghozzáférési
Robotika. Relatív helymeghatározás Odometria
 Robotika Relatív helymeghatározás Odometria Differenciális hajtás c m =πd n /nc e c m D n C e n = hány mm-t tesz meg a robot egy jeladó impulzusra = névleges kerék átmérő = jeladó fölbontása (impulzus/ford.)
Robotika Relatív helymeghatározás Odometria Differenciális hajtás c m =πd n /nc e c m D n C e n = hány mm-t tesz meg a robot egy jeladó impulzusra = névleges kerék átmérő = jeladó fölbontása (impulzus/ford.)
Programozó- készülék Kezelőkozol RT óra (pl. PC) Digitális bemenetek ROM memória Digitális kimenetek RAM memória Analóg bemenet Analóg kimenet
 Digitális bemenetek ROM memória Digitális kimenetek RAM memória Analóg bemenet Analóg kimenet") 2. ZH A csoport 1. Hogyan adható meg egy digitális műszer pontossága? (3p) Digitális műszereknél a pontosságot két adattal lehet megadni: Az osztályjel ±%-os értékével, és a ± digit értékkel (jellemző
2. ZH A csoport 1. Hogyan adható meg egy digitális műszer pontossága? (3p) Digitális műszereknél a pontosságot két adattal lehet megadni: Az osztályjel ±%-os értékével, és a ± digit értékkel (jellemző
2. rész PC alapú mérőrendszer esetén hogyan történhet az adatok kezelése? Írjon pár 2-2 jellemző is az egyes esetekhez.
 Méréselmélet és mérőrendszerek (levelező) Kérdések - 2. előadás 1. rész Írja fel a hiba fogalmát és hogyan számítjuk ki? Hogyan számítjuk ki a relatív hibát? Mit tud a rendszeres hibákról és mi az okozója
Méréselmélet és mérőrendszerek (levelező) Kérdések - 2. előadás 1. rész Írja fel a hiba fogalmát és hogyan számítjuk ki? Hogyan számítjuk ki a relatív hibát? Mit tud a rendszeres hibákról és mi az okozója
Számítógépes Hálózatok. 4. gyakorlat
 Számítógépes Hálózatok 4. gyakorlat Feladat 0 Számolja ki a CRC kontrollösszeget az 11011011001101000111 üzenetre, ha a generátor polinom x 4 +x 3 +x+1! Mi lesz a 4 bites kontrollösszeg? A fenti üzenet
Számítógépes Hálózatok 4. gyakorlat Feladat 0 Számolja ki a CRC kontrollösszeget az 11011011001101000111 üzenetre, ha a generátor polinom x 4 +x 3 +x+1! Mi lesz a 4 bites kontrollösszeg? A fenti üzenet
Hullámok tesztek. 3. Melyik állítás nem igaz a mechanikai hullámok körében?
 Hullámok tesztek 1. Melyik állítás nem igaz a mechanikai hullámok körében? a) Transzverzális hullám esetén a részecskék rezgésének iránya merıleges a hullámterjedés irányára. b) Csak a transzverzális hullám
Hullámok tesztek 1. Melyik állítás nem igaz a mechanikai hullámok körében? a) Transzverzális hullám esetén a részecskék rezgésének iránya merıleges a hullámterjedés irányára. b) Csak a transzverzális hullám
Compton-effektus. Zsigmond Anna. jegyzıkönyv. Fizika BSc III.
 Compton-effektus jegyzıkönyv Zsigmond Anna Fizika BSc III. Mérés vezetıje: Csanád Máté Mérés dátuma: 010. április. Leadás dátuma: 010. május 5. Mérés célja A kvantumelmélet egyik bizonyítékának a Compton-effektusnak
Compton-effektus jegyzıkönyv Zsigmond Anna Fizika BSc III. Mérés vezetıje: Csanád Máté Mérés dátuma: 010. április. Leadás dátuma: 010. május 5. Mérés célja A kvantumelmélet egyik bizonyítékának a Compton-effektusnak
INFRA HŐMÉRŐ (PIROMÉTER) AX-6520. Használati útmutató
 AX-6520. Használati útmutató") INFRA HŐMÉRŐ (PIROMÉTER) AX-6520 Használati útmutató TARTALOMJEGYZÉK 1. Biztonsági szabályok... 3 2. Megjegyzések... 3 3. A mérőműszer leírása... 3 4. LCD kijelző leírása... 4 5. Mérési mód...4 6. A pirométer
INFRA HŐMÉRŐ (PIROMÉTER) AX-6520 Használati útmutató TARTALOMJEGYZÉK 1. Biztonsági szabályok... 3 2. Megjegyzések... 3 3. A mérőműszer leírása... 3 4. LCD kijelző leírása... 4 5. Mérési mód...4 6. A pirométer
Vezetéknélküli Érzékelő Hálózatok
 Dr. Kasza Tamás Vezetéknélküli Érzékelő Hálózatok Budapest, 2011. február 16. www.meetthescientist.hu 1 28 Tanulmányok - M.Sc.: - 1994-1999: BME-VIK - 1995-2000: BME-GTK - 1999-2003: BKE - 1997-1998: ELTE-TTK
Dr. Kasza Tamás Vezetéknélküli Érzékelő Hálózatok Budapest, 2011. február 16. www.meetthescientist.hu 1 28 Tanulmányok - M.Sc.: - 1994-1999: BME-VIK - 1995-2000: BME-GTK - 1999-2003: BKE - 1997-1998: ELTE-TTK
Szenzorhálózatok I. Beágyazott információs rendszerek. Bevezetés. HW architektúrák. Alkalmazások március 30. Simon Gyula
 Beágyazott információs rendszerek Szenzorhálózatok I. Bevezetés. HW architektúrák. Alkalmazások 2005. március 30. Simon Gyula 2004 Méréstechnika és Információs Rendszerek Tanszék Tartalom A szenzorhálózatok
Beágyazott információs rendszerek Szenzorhálózatok I. Bevezetés. HW architektúrák. Alkalmazások 2005. március 30. Simon Gyula 2004 Méréstechnika és Információs Rendszerek Tanszék Tartalom A szenzorhálózatok
AGSMHÁLÓZATA TOVÁBBFEJLESZTÉSE A NAGYOBB
 AGSMHÁLÓZATA TOVÁBBFEJLESZTÉSE A NAGYOBB ADATSEBESSÉG ÉS CSOMAGKAPCSOLÁS FELÉ 2011. május 19., Budapest HSCSD - (High Speed Circuit-Switched Data) A rendszer négy 14,4 kbit/s-os átviteli időrés összekapcsolásával
AGSMHÁLÓZATA TOVÁBBFEJLESZTÉSE A NAGYOBB ADATSEBESSÉG ÉS CSOMAGKAPCSOLÁS FELÉ 2011. május 19., Budapest HSCSD - (High Speed Circuit-Switched Data) A rendszer négy 14,4 kbit/s-os átviteli időrés összekapcsolásával
Hibadetektáló és javító kódolások
 Hibadetektáló és javító kódolások Számítógépes adatbiztonság Hibadetektálás és javítás Zajos csatornák ARQ adatblokk meghibásodási valószínségének csökkentése blokk bvítése redundáns információval Hálózati
Hibadetektáló és javító kódolások Számítógépes adatbiztonság Hibadetektálás és javítás Zajos csatornák ARQ adatblokk meghibásodási valószínségének csökkentése blokk bvítése redundáns információval Hálózati
SPECIÁLIS CÉLÚ HÁLÓZATI
 SPECIÁLIS CÉLÚ HÁLÓZATI MEGOLDÁSOK KÜLÖNLEGES KÖRNYEZETBEN Gyakorlat Németh Zoltán 2016. december 9., Budapest Áttekintés Előző kérdések: SRD protokollok energiahatékonysága SRD protokollok IoT támogatása
SPECIÁLIS CÉLÚ HÁLÓZATI MEGOLDÁSOK KÜLÖNLEGES KÖRNYEZETBEN Gyakorlat Németh Zoltán 2016. december 9., Budapest Áttekintés Előző kérdések: SRD protokollok energiahatékonysága SRD protokollok IoT támogatása
Autóipari beágyazott rendszerek. Local Interconnection Network
 Autóipari beágyazott rendszerek Local Interconnection Network 1 Áttekintés Motiváció Kis sebességigényű alkalmazások A CAN drága Kvarc oszcillátort igényel Speciális perifériát igényel Két vezetéket igényel
Autóipari beágyazott rendszerek Local Interconnection Network 1 Áttekintés Motiváció Kis sebességigényű alkalmazások A CAN drága Kvarc oszcillátort igényel Speciális perifériát igényel Két vezetéket igényel
Adatelemzési eljárások az idegrendszer kutatásban Somogyvári Zoltán
 Adatelemzési eljárások az idegrendszer kutatásban Somogyvári Zoltán MTA KFKI Részecske és Magfizikai Intézet, Biofizikai osztály Az egy adatsorra (idősorra) is alkalmazható módszerek Példa: Az epileptikus
Adatelemzési eljárások az idegrendszer kutatásban Somogyvári Zoltán MTA KFKI Részecske és Magfizikai Intézet, Biofizikai osztály Az egy adatsorra (idősorra) is alkalmazható módszerek Példa: Az epileptikus
OFDM technológia és néhány megvalósítás Alvarion berendezésekben
 SCI-Network Távközlési és Hálózatintegrációs Rt. T.: 467-70-30 F.: 467-70-49 info@scinetwork.hu www.scinetwork.hu Nem tudtuk, hogy lehetetlen, ezért megcsináltuk. OFDM technológia és néhány megvalósítás
SCI-Network Távközlési és Hálózatintegrációs Rt. T.: 467-70-30 F.: 467-70-49 info@scinetwork.hu www.scinetwork.hu Nem tudtuk, hogy lehetetlen, ezért megcsináltuk. OFDM technológia és néhány megvalósítás
Mobil kommunikáció /A mobil hálózat/ /elektronikus oktatási segédlet/ v3.0
 Mobil kommunikáció /A mobil hálózat/ /elektronikus oktatási segédlet/ v3.0 Dr. Berke József berke@georgikon.hu 2006-2008 A MOBIL HÁLÓZAT - Tartalom RENDSZERTECHNIKAI FELÉPÍTÉS CELLULÁRIS FELÉPÍTÉS KAPCSOLATFELVÉTEL
Mobil kommunikáció /A mobil hálózat/ /elektronikus oktatási segédlet/ v3.0 Dr. Berke József berke@georgikon.hu 2006-2008 A MOBIL HÁLÓZAT - Tartalom RENDSZERTECHNIKAI FELÉPÍTÉS CELLULÁRIS FELÉPÍTÉS KAPCSOLATFELVÉTEL
Anyagvizsgálati módszerek
 Anyagvizsgáló és Állapotellenőrző Laboratórium Atomerőművi anyagvizsgálatok Az akusztikus emisszió vizsgálata a műszaki diagnosztikában Anyagvizsgálati módszerek Roncsolásos metallográfia, kémia, szakító,
Anyagvizsgáló és Állapotellenőrző Laboratórium Atomerőművi anyagvizsgálatok Az akusztikus emisszió vizsgálata a műszaki diagnosztikában Anyagvizsgálati módszerek Roncsolásos metallográfia, kémia, szakító,
IoT alapú mezőgazdasági adatgyűjtő prototípus fejlesztési tapasztalatok
 IoT alapú mezőgazdasági adatgyűjtő prototípus fejlesztési tapasztalatok 2016.05.19. Szilágyi Róbert Tóth Mihály Debreceni Egyetem Az IoT Eszközök és más fizikai objektumok elektronikával, vezérléssel,
IoT alapú mezőgazdasági adatgyűjtő prototípus fejlesztési tapasztalatok 2016.05.19. Szilágyi Róbert Tóth Mihály Debreceni Egyetem Az IoT Eszközök és más fizikai objektumok elektronikával, vezérléssel,
Digitális mérőműszerek. Kaltenecker Zsolt Hiradástechnikai Villamosmérnök Szinusz Hullám Bt.
 Digitális mérőműszerek Digitális jelek mérése Kaltenecker Zsolt Hiradástechnikai Villamosmérnök Szinusz Hullám Bt. MIRŐL LESZ SZÓ? Mit mérjünk? Hogyan jelentkezik a minőségromlás digitális jel esetében?
Digitális mérőműszerek Digitális jelek mérése Kaltenecker Zsolt Hiradástechnikai Villamosmérnök Szinusz Hullám Bt. MIRŐL LESZ SZÓ? Mit mérjünk? Hogyan jelentkezik a minőségromlás digitális jel esetében?
Üzemanyagfogyasztást becslő rendszer fejlesztése mobilapplikációval BARTA TAMÁS (EWGO7V)
") Üzemanyagfogyasztást becslő rendszer fejlesztése mobilapplikációval BARTA TAMÁS (EWGO7V) Alkalmazott megoldások a fogyasztás becslésére Tankszint mérésen alapuló becslés A tüzelőanyag a tartályban hullámzik,
Üzemanyagfogyasztást becslő rendszer fejlesztése mobilapplikációval BARTA TAMÁS (EWGO7V) Alkalmazott megoldások a fogyasztás becslésére Tankszint mérésen alapuló becslés A tüzelőanyag a tartályban hullámzik,
3D - geometriai modellezés, alakzatrekonstrukció, nyomtatás
 3D - geometriai modellezés, alakzatrekonstrukció, nyomtatás 15. Digitális Alakzatrekonstrukció Méréstechnológia, Ponthalmazok regisztrációja http://cg.iit.bme.hu/portal/node/312 https://www.vik.bme.hu/kepzes/targyak/viiiav54
3D - geometriai modellezés, alakzatrekonstrukció, nyomtatás 15. Digitális Alakzatrekonstrukció Méréstechnológia, Ponthalmazok regisztrációja http://cg.iit.bme.hu/portal/node/312 https://www.vik.bme.hu/kepzes/targyak/viiiav54
Mérési hibák 2006.10.04. 1
 Mérési hibák 2006.10.04. 1 Mérés jel- és rendszerelméleti modellje Mérési hibák_labor/2 Mérési hibák mérési hiba: a meghatározandó értékre a mérés során kapott eredmény és ideális értéke közötti különbség
Mérési hibák 2006.10.04. 1 Mérés jel- és rendszerelméleti modellje Mérési hibák_labor/2 Mérési hibák mérési hiba: a meghatározandó értékre a mérés során kapott eredmény és ideális értéke közötti különbség
Hálózatok. Alapismeretek. A hálózatok célja, építőelemei, alapfogalmak
 Hálózatok Alapismeretek A hálózatok célja, építőelemei, alapfogalmak A hálózatok célja A korai időkben terminálokat akartak használni a szabad gépidők lekötésére, erre jó lehetőség volt a megbízható és
Hálózatok Alapismeretek A hálózatok célja, építőelemei, alapfogalmak A hálózatok célja A korai időkben terminálokat akartak használni a szabad gépidők lekötésére, erre jó lehetőség volt a megbízható és
Aktív zajcsökkentı rendszerek megvalósítása szenzorhálózattal
 Aktív zajcsökkentı rendszerek megvalósítása szenzorhálózattal Orosz György, Lajkó László, Sujbert László Budapesti Mőszaki és Gazdaságtudományi Egyetem, Méréstechnika és Információs Rendszerek Tanszék
Aktív zajcsökkentı rendszerek megvalósítása szenzorhálózattal Orosz György, Lajkó László, Sujbert László Budapesti Mőszaki és Gazdaságtudományi Egyetem, Méréstechnika és Információs Rendszerek Tanszék
III.5 KILOPROCESSZOROSRENDSZE REK LOGISZTIKAI ALKALMAZÁSA (SZOLGAYPÉTER)
") infokommunikációs technológiák III.5 KILOPROCESSZOROSRENDSZE REK LOGISZTIKAI (SZOLGAYPÉTER) Kutatási irányok: StubendekAttila Hiba Antal Nem Boole típusú számító architektúrák elemzése Memória-elérés és
infokommunikációs technológiák III.5 KILOPROCESSZOROSRENDSZE REK LOGISZTIKAI (SZOLGAYPÉTER) Kutatási irányok: StubendekAttila Hiba Antal Nem Boole típusú számító architektúrák elemzése Memória-elérés és
A mérések általános és alapvető metrológiai fogalmai és definíciói. Mérések, mérési eredmények, mérési bizonytalanság. mérés. mérési elv
 Mérések, mérési eredmények, mérési bizonytalanság A mérések általános és alapvető metrológiai fogalmai és definíciói mérés Műveletek összessége, amelyek célja egy mennyiség értékének meghatározása. mérési
Mérések, mérési eredmények, mérési bizonytalanság A mérések általános és alapvető metrológiai fogalmai és definíciói mérés Műveletek összessége, amelyek célja egy mennyiség értékének meghatározása. mérési
1. A hang, mint akusztikus jel
 1. A hang, mint akusztikus jel Mechanikai rezgés - csak anyagi közegben terjed. A levegő molekuláinak a hangforrástól kiinduló, egyre csillapodva tovaterjedő mechanikai rezgése. Nemcsak levegőben, hanem
1. A hang, mint akusztikus jel Mechanikai rezgés - csak anyagi közegben terjed. A levegő molekuláinak a hangforrástól kiinduló, egyre csillapodva tovaterjedő mechanikai rezgése. Nemcsak levegőben, hanem
3D számítógépes geometria és alakzatrekonstrukció
 3D számítógépes geometria és alakzatrekonstrukció 15. Digitális Alakzatrekonstrukció Méréstechnológia, Ponthalmazok regisztrációja http://cg.iit.bme.hu/portal/node/312 https://www.vik.bme.hu/kepzes/targyak/viiima01
3D számítógépes geometria és alakzatrekonstrukció 15. Digitális Alakzatrekonstrukció Méréstechnológia, Ponthalmazok regisztrációja http://cg.iit.bme.hu/portal/node/312 https://www.vik.bme.hu/kepzes/targyak/viiima01
Házi feladatok Szenzorhálózatok és alkalmazásaik
 Házi feladatok Szenzorhálózatok és alkalmazásaik VITMMA09 Okos város MSc mellékspecializáció Általános tudnivalók 6 téma 6 db. 4 fős csoport A házi feladat elvégzése kötelező, a vizsgára jelentkezés feltétele
Házi feladatok Szenzorhálózatok és alkalmazásaik VITMMA09 Okos város MSc mellékspecializáció Általános tudnivalók 6 téma 6 db. 4 fős csoport A házi feladat elvégzése kötelező, a vizsgára jelentkezés feltétele
Költséghatékony high-end adattároló megoldások Vitéz Gábor, Avaxio Kft.
 Költséghatékony high-end adattároló megoldások Vitéz Gábor, Avaxio Kft. Az Avaxioról 2006 óta vagyunk a piacon Coraid Inc. kiemelt magyarországi partnere Fókusz: költséghatékony adattárolási megoldások
Költséghatékony high-end adattároló megoldások Vitéz Gábor, Avaxio Kft. Az Avaxioról 2006 óta vagyunk a piacon Coraid Inc. kiemelt magyarországi partnere Fókusz: költséghatékony adattárolási megoldások
IC-F15, IC-F25 I/O Modem interfész Mőszaki leírás
 IC-F15, IC-F25 I/O Modem interfész Mőszaki leírás 1. 2007-02-05 Vidra Kálmán Nagy Mihály/ Nagy Ferenc SCB-S6029/-A 1/1 1. Meghatározás. 1200 bit/sec sebességő FFSK rádiómodem I/O interfész vezérlés célú
IC-F15, IC-F25 I/O Modem interfész Mőszaki leírás 1. 2007-02-05 Vidra Kálmán Nagy Mihály/ Nagy Ferenc SCB-S6029/-A 1/1 1. Meghatározás. 1200 bit/sec sebességő FFSK rádiómodem I/O interfész vezérlés célú
Mechanikai hullámok. Hullámhegyek és hullámvölgyek alakulnak ki.
 Mechanikai hullámok Mechanikai hullámnak nevezzük, ha egy anyagban az anyag részecskéinek rezgésállapota továbbterjed. A mechanikai hullám terjedéséhez tehát szükség van valamilyen anyagra (légüres térben
Mechanikai hullámok Mechanikai hullámnak nevezzük, ha egy anyagban az anyag részecskéinek rezgésállapota továbbterjed. A mechanikai hullám terjedéséhez tehát szükség van valamilyen anyagra (légüres térben
RHTemp 2000. TepRetriver-RH. Hőmérséklet- és páratartalom adatgyűjtő, LCD kijelzővel. Hőmérséklet- és páratartalom adatgyűjtő
 TepRetriver-RH Hőmérséklet- és páratartalom adatgyűjtő - méréstartomány: -40 o C - +80 o C - pontosság: ±0,5 o C ( 0 o C - 50 o C) Páratartalom: - méréstartomány: 0%RH 95%RH - felbontás: 0,1 %RH - pontosság:
TepRetriver-RH Hőmérséklet- és páratartalom adatgyűjtő - méréstartomány: -40 o C - +80 o C - pontosság: ±0,5 o C ( 0 o C - 50 o C) Páratartalom: - méréstartomány: 0%RH 95%RH - felbontás: 0,1 %RH - pontosság:
4. Lokalizáció Magyar Attila
 4. Lokalizáció Magyar Attila Pannon Egyetem Műszaki Informatikai Kar Villamosmérnöki és Információs Rendszerek Tanszék magyar.attila@virt.uni-pannon.hu 2011. szeptember 23. 4. Lokalizáció 2 4. Tartalom
4. Lokalizáció Magyar Attila Pannon Egyetem Műszaki Informatikai Kar Villamosmérnöki és Információs Rendszerek Tanszék magyar.attila@virt.uni-pannon.hu 2011. szeptember 23. 4. Lokalizáció 2 4. Tartalom
Alapszintű formalizmusok
 Alapszintű formalizmusok dr. Majzik István BME Méréstechnika és Információs Rendszerek Tanszék 1 Mit szeretnénk elérni? Informális tervek Informális követelmények Formális modell Formalizált követelmények
Alapszintű formalizmusok dr. Majzik István BME Méréstechnika és Információs Rendszerek Tanszék 1 Mit szeretnénk elérni? Informális tervek Informális követelmények Formális modell Formalizált követelmények
Az LTE. és a HSPA lehetőségei. Cser Gábor Magyar Telekom/Rádiós hozzáférés tervezési ágazat
 Az LTE és a HSPA lehetőségei Cser Gábor Magyar Telekom/Rádiós hozzáférés tervezési ágazat Author / Presentation title 08/29/2007 1 Áttekintés Út az LTE felé Antennarendszerek (MIMO) Modulációk HSPA+ LTE
Az LTE és a HSPA lehetőségei Cser Gábor Magyar Telekom/Rádiós hozzáférés tervezési ágazat Author / Presentation title 08/29/2007 1 Áttekintés Út az LTE felé Antennarendszerek (MIMO) Modulációk HSPA+ LTE
elektronikus adattárolást memóriacím
 MEMÓRIA Feladata A memória elektronikus adattárolást valósít meg. A számítógép csak olyan műveletek elvégzésére és csak olyan adatok feldolgozására képes, melyek a memóriájában vannak. Az információ tárolása
MEMÓRIA Feladata A memória elektronikus adattárolást valósít meg. A számítógép csak olyan műveletek elvégzésére és csak olyan adatok feldolgozására képes, melyek a memóriájában vannak. Az információ tárolása
Időjárásállomás külső érzékelőjétől érkező rádiójel feldolgozása
 Időjárásállomás külső érzékelőjétől érkező rádiójel feldolgozása Az elektromágneses sugárzás spektruma Az elektronok mozgása elektromágneses hullámokat kelt Adattovábbítás főleg a rádióhullámokkal (7 khz
Időjárásállomás külső érzékelőjétől érkező rádiójel feldolgozása Az elektromágneses sugárzás spektruma Az elektronok mozgása elektromágneses hullámokat kelt Adattovábbítás főleg a rádióhullámokkal (7 khz
Babeș Bólyai Tudományegyetem Informatika kar Műholdas helymeghatározás a GPS rendszerrel
 Babeș Bólyai Tudományegyetem Informatika kar Műholdas helymeghatározás a GPS rendszerrel Szűcs Attila Levente Kolozsvár, 2010 Április 29. 1. Bevezető A GPS az angol Global Positioning System megnevezés
Babeș Bólyai Tudományegyetem Informatika kar Műholdas helymeghatározás a GPS rendszerrel Szűcs Attila Levente Kolozsvár, 2010 Április 29. 1. Bevezető A GPS az angol Global Positioning System megnevezés
A LOGSYS GUI. Fehér Béla Raikovich Tamás, Laczkó Péter BME MIT FPGA laboratórium
 BUDAPESTI MŐSZAKI ÉS GAZDASÁGTUDOMÁNYI EGYETEM VILLAMOSMÉRNÖKI ÉS INFORMATIKAI KAR MÉRÉSTECHNIKA ÉS INFORMÁCIÓS RENDSZEREK TANSZÉK A LOGSYS GUI Fehér Béla Raikovich Tamás, Laczkó Péter BME MIT atórium
BUDAPESTI MŐSZAKI ÉS GAZDASÁGTUDOMÁNYI EGYETEM VILLAMOSMÉRNÖKI ÉS INFORMATIKAI KAR MÉRÉSTECHNIKA ÉS INFORMÁCIÓS RENDSZEREK TANSZÉK A LOGSYS GUI Fehér Béla Raikovich Tamás, Laczkó Péter BME MIT atórium
A nagy időfelbontású kamerák következő generációja: EDICAM
 A nagy időfelbontású kamerák következő generációja: EDICAM Bevezető A gyorskamerák korlátai Az EDICAM fejlesztés Hardver NDR kiolvasás Intelligens funkciók Pellet és videódiagnosztika csoport (PFO) Cseh
A nagy időfelbontású kamerák következő generációja: EDICAM Bevezető A gyorskamerák korlátai Az EDICAM fejlesztés Hardver NDR kiolvasás Intelligens funkciók Pellet és videódiagnosztika csoport (PFO) Cseh
Akusztikai tervezés a geometriai akusztika módszereivel
 Akusztikai tervezés a geometriai akusztika módszereivel Fürjes Andor Tamás BME Híradástechnikai Tanszék Kép- és Hangtechnikai Laborcsoport, Rezgésakusztika Laboratórium 1 Tartalom A geometriai akusztika
Akusztikai tervezés a geometriai akusztika módszereivel Fürjes Andor Tamás BME Híradástechnikai Tanszék Kép- és Hangtechnikai Laborcsoport, Rezgésakusztika Laboratórium 1 Tartalom A geometriai akusztika
Autóipari beágyazott rendszerek. A kommunikáció alapjai
 Autóipari beágyazott rendszerek A kommunikáció alapjai 1 Alapfogalmak Hálózati kommunikáció Vezérlőegységek közötti információ továbbítás Csomópontok Kommunikációs csatornákon keresztül Terepbuszok (cluster)
Autóipari beágyazott rendszerek A kommunikáció alapjai 1 Alapfogalmak Hálózati kommunikáció Vezérlőegységek közötti információ továbbítás Csomópontok Kommunikációs csatornákon keresztül Terepbuszok (cluster)
Szenzorhálózatok III.
 Beágyazott információs rendszerek Szenzorhálózatok III. Kommunikáció a szenzorhálózatokban 2005. április 6. Simon Gyula 2004 Méréstechnika és Információs Rendszerek Tanszék Tartalom Kommunikáció a szenzorhálózatokban
Beágyazott információs rendszerek Szenzorhálózatok III. Kommunikáció a szenzorhálózatokban 2005. április 6. Simon Gyula 2004 Méréstechnika és Információs Rendszerek Tanszék Tartalom Kommunikáció a szenzorhálózatokban
BUDAPESTI MŐSZAKI ÉS GAZDASÁGTUDOMÁNYI EGYETEM
 BUDAPESTI MŐSZAKI ÉS GAZDASÁGTUDOMÁNYI EGYETEM Számítógépes Modellezés Házi Feladat Készítete: Magyar Bálint Dátum: 2008. 01. 01. A feladat kiírása A számítógépes modellezés c. tárgy házi feladataként
BUDAPESTI MŐSZAKI ÉS GAZDASÁGTUDOMÁNYI EGYETEM Számítógépes Modellezés Házi Feladat Készítete: Magyar Bálint Dátum: 2008. 01. 01. A feladat kiírása A számítógépes modellezés c. tárgy házi feladataként
ProSeniis projekt. Monos János GE Healthcare
 ProSeniis projekt Monos János GE Healthcare ProSeniis projekt 3 éves, magyar állam által támogatott program GE Healthcare által vezetett, 6 tagú konzorcium neves magyar egyetemekkel és egészségügyi vállalkozásokkal
ProSeniis projekt Monos János GE Healthcare ProSeniis projekt 3 éves, magyar állam által támogatott program GE Healthcare által vezetett, 6 tagú konzorcium neves magyar egyetemekkel és egészségügyi vállalkozásokkal
Közúti forgalomszámlálás e_sensor rendszerrel. 2012.06.04 2012.06.10 Budapest dugódíj projekt (sajtóanyag)
") Közúti forgalomszámlálás e_sensor rendszerrel 2012.06.04 2012.06.10 Budapest dugódíj projekt (sajtóanyag) 1 Cégbemutató A Sensor Technologies Kft. videó analitikai rendszereket fejleszt budapesti székhellyel.
Közúti forgalomszámlálás e_sensor rendszerrel 2012.06.04 2012.06.10 Budapest dugódíj projekt (sajtóanyag) 1 Cégbemutató A Sensor Technologies Kft. videó analitikai rendszereket fejleszt budapesti székhellyel.
S atisztika 2. előadás
 Statisztika 2. előadás 4. lépés Terepmunka vagy adatgyűjtés Kutatási módszerek osztályozása Kutatási módszer Feltáró kutatás Következtető kutatás Leíró kutatás Ok-okozati kutatás Keresztmetszeti kutatás
Statisztika 2. előadás 4. lépés Terepmunka vagy adatgyűjtés Kutatási módszerek osztályozása Kutatási módszer Feltáró kutatás Következtető kutatás Leíró kutatás Ok-okozati kutatás Keresztmetszeti kutatás
BEÁGYAZOTT RENDSZEREK TERVEZÉSE UDP csomag küldése és fogadása beágyazott rendszerrel példa
 BEÁGYAZOTT RENDSZEREK TERVEZÉSE 1 feladat: A Netburner MOD5270 fejlesztőlap segítségével megvalósítani csomagok küldését és fogadását a fejlesztőlap és egy PC számítógép között. megoldás: A fejlesztőlapra,
BEÁGYAZOTT RENDSZEREK TERVEZÉSE 1 feladat: A Netburner MOD5270 fejlesztőlap segítségével megvalósítani csomagok küldését és fogadását a fejlesztőlap és egy PC számítógép között. megoldás: A fejlesztőlapra,
Tisztán kivehetı tendencia: kommunikációs hálózatok egyre bonyolultabbakká válnak Hálózat bonyolultsága
 @ Budapest University of Technology and Economics Nagy hálózatok evolúciója Gulyás András, Heszberger Zalán High Speed Networks Laboratory Internet trendek Tisztán kivehetı tendencia: kommunikációs hálózatok
@ Budapest University of Technology and Economics Nagy hálózatok evolúciója Gulyás András, Heszberger Zalán High Speed Networks Laboratory Internet trendek Tisztán kivehetı tendencia: kommunikációs hálózatok
Internet-hozzáférések teljesítményvizsgálata webböngészőben
 Internet-hozzáférések teljesítményvizsgálata webböngészőben Orosz Péter BME TMIT SmartCom Lab 4. Magyar Jövő Internet Konferencia 2017. november 8-9. Áttekintés Adatforgalmi trendek és internethozzáférések
Internet-hozzáférések teljesítményvizsgálata webböngészőben Orosz Péter BME TMIT SmartCom Lab 4. Magyar Jövő Internet Konferencia 2017. november 8-9. Áttekintés Adatforgalmi trendek és internethozzáférések
Elektromos nagybıgı megvalósítása DSP-vel
 Budapesti Mőszaki és Gazdaságtudományi Egyetem Gyurász Gábor Tamás Elektromos nagybıgı megvalósítása DSP-vel MSc. Önálló laboratórium II. beszámoló Konzulensek: dr. Bank Balázs Lajos Orosz György Problémafelvetés
Budapesti Mőszaki és Gazdaságtudományi Egyetem Gyurász Gábor Tamás Elektromos nagybıgı megvalósítása DSP-vel MSc. Önálló laboratórium II. beszámoló Konzulensek: dr. Bank Balázs Lajos Orosz György Problémafelvetés
Informatikai eszközök fizikai alapjai Lovász Béla
 Informatikai eszközök fizikai alapjai Lovász Béla Kódolás Moduláció Morzekód Mágneses tárolás merevlemezeken Modulációs eljárások típusai Kódolás A kód megállapodás szerinti jelek vagy szimbólumok rendszere,
Informatikai eszközök fizikai alapjai Lovász Béla Kódolás Moduláció Morzekód Mágneses tárolás merevlemezeken Modulációs eljárások típusai Kódolás A kód megállapodás szerinti jelek vagy szimbólumok rendszere,
MIKROFYN GÉPVEZÉRLÉSEK. 2D megoldások:
 MIKROFYN GÉPVEZÉRLÉSEK Néhány szó a gyártóról: Az 1987-es kezdés óta a Mikrofyn A/S a világ öt legnagyobb precíziós lézer és gépvezérlés gyártója közé lépett. A profitot visszaforgatta az új termékek fejlesztésébe
MIKROFYN GÉPVEZÉRLÉSEK Néhány szó a gyártóról: Az 1987-es kezdés óta a Mikrofyn A/S a világ öt legnagyobb precíziós lézer és gépvezérlés gyártója közé lépett. A profitot visszaforgatta az új termékek fejlesztésébe
3. A DIGILENT BASYS 2 FEJLESZTŐLAP LEÍRÁSA
 3. A DIGILENT BASYS 2 FEJLESZTŐLAP LEÍRÁSA Az FPGA tervezésben való jártasság megszerzésének célszerű módja, hogy gyári fejlesztőlapot alkalmazzunk. Ezek kiválóan alkalmasak tanulásra, de egyes ipari tervezésekhez
3. A DIGILENT BASYS 2 FEJLESZTŐLAP LEÍRÁSA Az FPGA tervezésben való jártasság megszerzésének célszerű módja, hogy gyári fejlesztőlapot alkalmazzunk. Ezek kiválóan alkalmasak tanulásra, de egyes ipari tervezésekhez
Wireless technológiák. 2011. 05. 02 Meretei Balázs
 Wireless technológiák 2011. 05. 02 Meretei Balázs Tartalom Alapfogalmak (Rövidítések, Moduláció, Csatorna hozzáférés) Szabványok Csatorna hozzáférés PTP - PTmP Mire figyeljünk Az építés új szabályai SNR,
Wireless technológiák 2011. 05. 02 Meretei Balázs Tartalom Alapfogalmak (Rövidítések, Moduláció, Csatorna hozzáférés) Szabványok Csatorna hozzáférés PTP - PTmP Mire figyeljünk Az építés új szabályai SNR,
Járműinformatika Multimédiás buszrendszerek (MOST, D2B és Bluetooth) 4. Óra
 4. Óra") Járműinformatika Multimédiás buszrendszerek (MOST, D2B és Bluetooth) 4. Óra Multimédiás adatok továbbítása és annak céljai Mozgókép és hang átvitele Szórakoztató elektronika Biztonsági funkciókat megvalósító
Járműinformatika Multimédiás buszrendszerek (MOST, D2B és Bluetooth) 4. Óra Multimédiás adatok továbbítása és annak céljai Mozgókép és hang átvitele Szórakoztató elektronika Biztonsági funkciókat megvalósító
Digitális hangszintmérő
 Digitális hangszintmérő Modell DM-1358 A jelen használati útmutató másolása, bemutatása és terjesztése a Transfer Multisort Elektronik írásbeli hozzájárulását igényli. Használati útmutató Óvintézkedések
Digitális hangszintmérő Modell DM-1358 A jelen használati útmutató másolása, bemutatása és terjesztése a Transfer Multisort Elektronik írásbeli hozzájárulását igényli. Használati útmutató Óvintézkedések
4. A kézfogások száma pont Összesen: 2 pont
 I. 1. A páros számokat tartalmazó részhalmazok: 6 ; 8 ; 6 ; 8. { } { } { }. 5 ( a ) 17 Összesen: t = = a a Összesen: ot kaphat a vizsgázó, ha csak két helyes részhalmazt ír fel. Szintén jár, ha a helyes
I. 1. A páros számokat tartalmazó részhalmazok: 6 ; 8 ; 6 ; 8. { } { } { }. 5 ( a ) 17 Összesen: t = = a a Összesen: ot kaphat a vizsgázó, ha csak két helyes részhalmazt ír fel. Szintén jár, ha a helyes
INFORMATIKA ÁGAZATI ALKALMAZÁSAI. Az Agrármérnöki MSc szak tananyagfejlesztése TÁMOP-4.1.2-08/1/A-2009-0010
 INFORMATIKA ÁGAZATI ALKALMAZÁSAI Az Agrármérnöki MSc szak tananyagfejlesztése TÁMOP-4.1.2-08/1/A-2009-0010 10. GPS, GPRS (mobilkommunikációs) ismeretek Helymeghatározás GPS rendszer alapelve GNSS rendszerek
INFORMATIKA ÁGAZATI ALKALMAZÁSAI Az Agrármérnöki MSc szak tananyagfejlesztése TÁMOP-4.1.2-08/1/A-2009-0010 10. GPS, GPRS (mobilkommunikációs) ismeretek Helymeghatározás GPS rendszer alapelve GNSS rendszerek
CORONA ER TÖBBSUGARAS ELEKTRONIKUS VÍZMÉRŐ
 ALKALMAZÁSI TERÜLET Teljesen elektronikus szárnykerekes vízmérő beépített rádiómodullal, hideg- és melegvíz felhasználás mérésére. Nagyon pontos adatrögzítés minden számlázási adatról 90 C közeghőmérsékletig.
ALKALMAZÁSI TERÜLET Teljesen elektronikus szárnykerekes vízmérő beépített rádiómodullal, hideg- és melegvíz felhasználás mérésére. Nagyon pontos adatrögzítés minden számlázási adatról 90 C közeghőmérsékletig.
Norway Grants. Az akkumulátor mikromenedzsment szabályozás - BMMR - fejlesztés technológiai és műszaki újdonságai. Kakuk Zoltán, Vision 95 Kft.
 Norway Grants AKKUMULÁTOR REGENERÁCIÓS ÉS Az akkumulátor mikromenedzsment szabályozás - BMMR - fejlesztés technológiai és műszaki újdonságai Kakuk Zoltán, Vision 95 Kft. 2017.04.25. Rendszer szintű megoldás
Norway Grants AKKUMULÁTOR REGENERÁCIÓS ÉS Az akkumulátor mikromenedzsment szabályozás - BMMR - fejlesztés technológiai és műszaki újdonságai Kakuk Zoltán, Vision 95 Kft. 2017.04.25. Rendszer szintű megoldás
VL IT i n du s t ri al Kommunikációs vázlat
 VL IT i n du s t ri al Kommunikációs vázlat k i v it e l A műszaki adatok előzetes ér tesítés nélkül változhatnak. A műszaki adatok előzetes értesítés nélkül változhatnak. VLIT TAG A1 WB ATEX Aktív RFID
VL IT i n du s t ri al Kommunikációs vázlat k i v it e l A műszaki adatok előzetes ér tesítés nélkül változhatnak. A műszaki adatok előzetes értesítés nélkül változhatnak. VLIT TAG A1 WB ATEX Aktív RFID
2011. május 19., Budapest UWB ÁTTEKINTÉS
 2011. május 19., Budapest UWB ÁTTEKINTÉS Mi az UWB? Hot new topic. Más elnevezések: impulzus rádió, alapsávi rádió, vivő- mentes rádió. Az USA védelmi minisztériuma használta először az UWB elnevezést
2011. május 19., Budapest UWB ÁTTEKINTÉS Mi az UWB? Hot new topic. Más elnevezések: impulzus rádió, alapsávi rádió, vivő- mentes rádió. Az USA védelmi minisztériuma használta először az UWB elnevezést
Wireless M-Bus, C mód modul MULTICAL 402 fogyasztásmérőkhöz Adatlap
 Wireless M-Bus, C mód modul MULTICAL 402 fogyasztásmérőkhöz Adatlap Vezeték nélküli adattovábbítás 16 másodpercenként Akár 16 éves elem élettartam Stabil és gyors adatkiolvasás Szabad Európai rádiófrekvencia
Wireless M-Bus, C mód modul MULTICAL 402 fogyasztásmérőkhöz Adatlap Vezeték nélküli adattovábbítás 16 másodpercenként Akár 16 éves elem élettartam Stabil és gyors adatkiolvasás Szabad Európai rádiófrekvencia
Click to edit Master title style
 2017 Okos Városok Magyarországon - okos városok a régióban 2017 május 25. Bottyán Balázs: Okos város LoRa alapokon - intelilight közvilágítási hálózat, mint smart city alapinfrastruktúra bevezetés és kontextus
2017 Okos Városok Magyarországon - okos városok a régióban 2017 május 25. Bottyán Balázs: Okos város LoRa alapokon - intelilight közvilágítási hálózat, mint smart city alapinfrastruktúra bevezetés és kontextus
Ultrahangos anyagvizsgálati módszerek atomerőművekben
 Ultrahangos anyagvizsgálati módszerek atomerőművekben Hangfrekvencia 20 000 000 Hz 20 MHz 2 000 000 Hz 20 000 Hz 20 Hz anyagvizsgálatok esetén használt UH ultrahang hallható hang infrahang 2 MHz 20 khz
Ultrahangos anyagvizsgálati módszerek atomerőművekben Hangfrekvencia 20 000 000 Hz 20 MHz 2 000 000 Hz 20 000 Hz 20 Hz anyagvizsgálatok esetén használt UH ultrahang hallható hang infrahang 2 MHz 20 khz
Mozgásmodellezés. Lukovszki Csaba. Navigációs és helyalapú szolgáltatások és alkalmazások (VITMMA07)
") TÁVKÖZLÉSI ÉS MÉDIAINFORMATIKAI TANSZÉK () BUDAPESTI MŰSZAKI ÉS GAZDASÁGTUDOMÁNYI EGYETEM (BME) Mozgásmodellezés Lukovszki Csaba Áttekintés» Probléma felvázolása» Szabadsági fokok» Diszkretizált» Hibát
TÁVKÖZLÉSI ÉS MÉDIAINFORMATIKAI TANSZÉK () BUDAPESTI MŰSZAKI ÉS GAZDASÁGTUDOMÁNYI EGYETEM (BME) Mozgásmodellezés Lukovszki Csaba Áttekintés» Probléma felvázolása» Szabadsági fokok» Diszkretizált» Hibát
RFID rendszer felépítése
 RFID és RTLS RFID rendszer felépítése 1. Tag-ek (transzponder) 2. Olvasók (interrogátor) 3. Számítógépes infrastruktúra 4. Szoftverek Tárgyak, élőlények, helyszínek azonosítása, követése és menedzsmentje
RFID és RTLS RFID rendszer felépítése 1. Tag-ek (transzponder) 2. Olvasók (interrogátor) 3. Számítógépes infrastruktúra 4. Szoftverek Tárgyak, élőlények, helyszínek azonosítása, követése és menedzsmentje
ÜZEMBEHELYEZİI LEÍRÁS Figyelem! A konfigurációs mód eltér a 433MHz-es verziótól!
 Rev.1T10MM ÜZEMBEHELYEZİI LEÍRÁS Figyelem! A konfigurációs mód eltér a 433MHz-es verziótól! Ez a kültéri, vezeték nélküli passzív infravörös mikrohullámú mozgásérzékelı bármilyen riasztóközponthoz illeszthetı,
Rev.1T10MM ÜZEMBEHELYEZİI LEÍRÁS Figyelem! A konfigurációs mód eltér a 433MHz-es verziótól! Ez a kültéri, vezeték nélküli passzív infravörös mikrohullámú mozgásérzékelı bármilyen riasztóközponthoz illeszthetı,
Kvantum kommunikáció használata az őrtávközlésben
 Budapesti Mőszaki és Gazdaságtudományi Egyetem Villamosmérnöki és Informatikai Kar Híradástechnikai Tanszék Kvantum kommunikáció használata az őrtávközlésben Bacsárdi László bacsardi@hit.bme.hu 2009. április
Budapesti Mőszaki és Gazdaságtudományi Egyetem Villamosmérnöki és Informatikai Kar Híradástechnikai Tanszék Kvantum kommunikáció használata az őrtávközlésben Bacsárdi László bacsardi@hit.bme.hu 2009. április
Aktív zajcsökkentést demonstráló rendszer továbbfejlesztése. Csofcsics Donát Gusztáv Tamás
 Aktív zajcsökkentést demonstráló rendszer továbbfejlesztése Csofcsics Donát Gusztáv Tamás Előző félévben végzett munka Szenzorhálózattal működő többcsatornás zajcsökkentő rendszer megismerése Berkeley
Aktív zajcsökkentést demonstráló rendszer továbbfejlesztése Csofcsics Donát Gusztáv Tamás Előző félévben végzett munka Szenzorhálózattal működő többcsatornás zajcsökkentő rendszer megismerése Berkeley
Általános követelmények a kép tartalmával és minőségével kapcsolatban
 Általános követelmények a kép tartalmával és minőségével kapcsolatban A következő követelmények egyrészt azért fontosak, hogy megfelelően dokumentálják az eseményeket (bizonyítékként felhasználóak legyenek),
Általános követelmények a kép tartalmával és minőségével kapcsolatban A következő követelmények egyrészt azért fontosak, hogy megfelelően dokumentálják az eseményeket (bizonyítékként felhasználóak legyenek),
Az RTLS projekt első teszt alkalmazása. HiCall. Wireless nővérhívó és betegkövető rendszer 1244-10
 Az RTLS projekt első teszt alkalmazása HiCall Wireless nővérhívó és betegkövető rendszer 1244-10 A beteg eltéved, elfelejti hol van, elesik, rosszul lesz és sürgős segítségre van szüksége! A karkötőjén
Az RTLS projekt első teszt alkalmazása HiCall Wireless nővérhívó és betegkövető rendszer 1244-10 A beteg eltéved, elfelejti hol van, elesik, rosszul lesz és sürgős segítségre van szüksége! A karkötőjén
Párhuzamos programozási platformok
 Párhuzamos programozási platformok Parallel számítógép részei Hardver Több processzor Több memória Kapcsolatot biztosító hálózat Rendszer szoftver Párhuzamos operációs rendszer Konkurenciát biztosító programozási
Párhuzamos programozási platformok Parallel számítógép részei Hardver Több processzor Több memória Kapcsolatot biztosító hálózat Rendszer szoftver Párhuzamos operációs rendszer Konkurenciát biztosító programozási
Szenzorhálózatok programfejlesztési kérdései. Orosz György
 Szenzorhálózatok programfejlesztési kérdései Orosz György 2011. 09. 30. Szoftverfejlesztési alternatívák Erőforráskorlátok! (CPU, MEM, Energia) PC-től eltérő felfogás: HW közeli programozás Eszközök közvetlen
Szenzorhálózatok programfejlesztési kérdései Orosz György 2011. 09. 30. Szoftverfejlesztési alternatívák Erőforráskorlátok! (CPU, MEM, Energia) PC-től eltérő felfogás: HW közeli programozás Eszközök közvetlen
Párhuzamos programozási platformok
 Párhuzamos programozási platformok Parallel számítógép részei Hardver Több processzor Több memória Kapcsolatot biztosító hálózat Rendszer szoftver Párhuzamos operációs rendszer Konkurenciát biztosító programozási
Párhuzamos programozási platformok Parallel számítógép részei Hardver Több processzor Több memória Kapcsolatot biztosító hálózat Rendszer szoftver Párhuzamos operációs rendszer Konkurenciát biztosító programozási
Égből kapott RTK korrekciók nyomában Nagy-Kis Ildikó - Geotools Europe GNSS Kft. IX. Térinformatikai Konferencia Debreceni Egyetem
 Égből kapott RTK korrekciók nyomában Nagy-Kis Ildikó - Geotools Europe GNSS Kft. IX. Térinformatikai Konferencia Debreceni Egyetem A Geotools Europe GNSS Kft., mint forgalmazó - a 30 éve(s) ismerős Geotrade
Égből kapott RTK korrekciók nyomában Nagy-Kis Ildikó - Geotools Europe GNSS Kft. IX. Térinformatikai Konferencia Debreceni Egyetem A Geotools Europe GNSS Kft., mint forgalmazó - a 30 éve(s) ismerős Geotrade
Murinkó Gergő
 2018.10.10 Murinkó Gergő P r o f e s s z i o n á l i s K ö z m ű k e r e s ő k 2 - Munkabiztonság - Eltakart értékek védelme - Feltárások felgyorsítása Kérdések és válaszok? - Milyen anyagú cső, milyen
2018.10.10 Murinkó Gergő P r o f e s s z i o n á l i s K ö z m ű k e r e s ő k 2 - Munkabiztonság - Eltakart értékek védelme - Feltárások felgyorsítása Kérdések és válaszok? - Milyen anyagú cső, milyen