Robotok irányítása. főiskolai jegyzet javított változat. írta: Tukora Balázs
|
|
|
- Emília Nemes
- 7 évvel ezelőtt
- Látták:
Átírás
1 Robotok ránítása főskola jgt javított váltoat írta: Tukora Balás Pécs, 4

2 . Bvtés Jln jgt a Pécs Tudomángtm Pollack Mhál Műsak Főskola Karán foló Műsak Informatka képés Robotránítás rndsrk I-II. tantárgaho íródott. Célja a robotok ránításáho és programoásáho sükségs átfogó lmélt, matmatka alapokat mgsmrttn a hallgatókkal. A mgértést, ahol csak lht, kapcsolódó példák bmutatása hívatott lősgítn. A ábrák lgnagobb rés és a programoás fladatok a FESTO cég COSIMIR nvű par robotok programoására kfjlsttt és séls körbn hasnált krtrndsrénk oktatás vrójával késültk.

3 . Alapfogalmak A séls körbn lfogadott dfnícó srnt par robotnak a sabadon programoható, mogást végő automatákat nvük. Mchanka flépítésük néhán rtka kvétltől ltkntv rögíttt alappontú, lágaás nélkül knmatka lánccal flírható, vags a mbr karho hasonló sköökről, robotkarokról van só. Létnk ún. manpulátorok lltv tloprátorok, amlk kövtln mchankus módon vag kövtv, távránítással kövtk a klő mbr modulatat (például g jostckkal ránítható, kamrával és manpulátorkarral flsrlt mobl bombakrső jármű), kt általában nm sorolják a robotok köé. A kövtkő fjtkbn a robotok vérlés kérdés krülnk tárgalásra. Kétfél smsögből vsgálhatjuk a témakört: A robotot ümlttő sakmbr smpontjából, aknk a a célja, hog a lvégndő munkafolamatot gsrű, ám hatékon módon dfnálja a robot sámára. A robot (lltv trvőj) smpontjából, ahol a fladatot a jlnt, hog a flhasnáló által mgadott utasításokat mln matmatka sabálsrűségk és programoás tchnkák révén alakítsuk át ténlgs, fka és géb kénsrktől bfolásolt mogássá. Lássuk csak, mt s csnál tulajdonképpn g robotkar? Előr dfnált útvonalon, pálán vs végg g srsámot, mgfogót, sórópstolt, stb., és a pála bonos pontjan kkl különfél művltkt vég. A pála bjárásának mnőség különböő lht: Bonos fladatoknál nm sükségs a útvonal ktüntttt pontja köött mogást lőr mghatáron. a például g robotkarral át akarunk vttn g munkadarabot a robot gk oldaláról a máskra, flslgs pontosan dfnálnunk at, hog t mln útvonalon tg, lég csak a kdő- és végpontot mgadn. Et a vérlést PTP (Pont to Pont) ránításnak nvk.

4 Vannak stk, ahol a srsámnak vag mgfogott tárgnak sgorúan gns vonalban kll haladn: például g tngl furatba llstésénél. Más kötött pálaalakok s lképlhtők. Ekkor CP (Contnuous Path), foltonos pálaránításról bsélünk. Ívhgstésnél vag prcí fstés, ragastás munkálatoknál a srsám lmodulás lltv lfordulás sbsség s állandó kll lgn. E sbsségvérléssl oldható mg. Mndn gs srsámra vag mgfogóra g úgnvtt srsámköéppontot (TCP, Tool Cntr Pont) dfnálunk (. ábra). E lht a fstéksóró-pstol sórófj, vag a a pont, ahol a ujjak mgfogják a munkadarabot. Pálabjárás alatt mndg a TCP adott pálájú mogását értjük. Ealatt a TCP poícója és orntácója (lfordulása) s a mgkívánt módon váltok.. ábra A pálabjárás mgtrvésénél még géb ténőkr s üglnünk kll. Fglmb kll vnnünk a robot munkatrét: Mln mss tud knúln a kar, mt tudunk vl lérn a srlőastalon lltv géb magasságokban. 4
 s a mgkívánt módon váltok.. ábra A pálabjárás mgtrvésénél még géb ténőkr s üglnünk kll.")
5 ol vannak aok a holt trk a lvlg dáls munkatérn blül, amlkt a oko, hog a robot ült csak bonos sögtartománban képsk lforduln, lcsavarodn. Mln akadálok nhítk a robot sabad mogását. Eg robot sosm dolgok gdül. Embrk, más robotok, srsámgépk, sköök solgálják k őt, lltv solgálja k aokat. Éréklőkkl van körülvév, kamra sgít a munkáját. a g robot fladata g sajtológépb hln a alapanagot, majd kvnn a késr préslt munkadarabot, akkor pontosan tudna kll, hog a prés mkor van ntva, mkor dolgok, lltv tudatna kll a gép flé, hog mkor ndíthatja l a sajtolást. Tulajdonképpn még a robotkar mgfogója s a külvlág rés. Függtlnül vérlhtő gség, snorokkal flsrlv. Éppn ért a vérlőgségnk több b- és kmnttl s rndlkn kll, amlk a külvlággal való kapcsolatát btosítják. A snorok jlnk fogadásáho stnként lgndő lht g gsrű bnárs kapcsolat, ntllgns sköök bonolultabb csatolókat génlnk. A robot vérlésénél fgln lltv flügln kll kt a kapcsolatokat; állapotuktól függőn várakoást lltv lágaásokat ktathatunk a munkafolamatba. A ddgk alapján a kövtkő gségk sükségsk g robot vérlés fladatanak lvégéséh: CPU és artmtka procssor modul Mmóra modul a program lltv pálaadatok tárolásáho Külső adattároló Klő gség (trmnál) Ké vérlő gség I/O modul o Bnárs I/O o Analóg gség o Dgtáls soros/párhuamos gség o Egéb ntrfac-k 5

6 Srvo modul a motorsabáloásho Egéb kövtln srsámvérlő gségk. A robotok programoásának módja A sokfajta lvégndő munkafolamat, lltv a kh trvtt különfél robotok más és más programoás tchnkákat génlnk. A ún. onln programoás mgkövtl a robot jlnlétét: a robotot vag annak modlljét mogatva tanítjuk b a bjárandó útvonalat. A offln programoás mód alkalmaásakor nncs sükségünk a robotra, g sámítógép mlltt ülv, dmnós objktum-smulácó sgítségévl vag gsrű sövgs bvtlll írjuk mg a programot.. Onln programoás A onln programoás fogalma különböő tchnkákat takar: Drkt btanítás (Drct Tach-In): Olan hlkn alkalmaák, ahol a robot foltonos pálaránítással vag sbsségvérléssl mogatja a srsámot, vsonlag bonolult pálát bjárva (például autókarossérák fstésénél). A tchnkus véggvt a robot karját a kívánt útvonalon, mköbn a vérlőgség folamatosan fljg a robotkar hltét, íg később önállóan vssajátshatja at. Nagmértű robotoknál a robotkar könníttt, hajtások nélkül modlljét mogatja a btanító. Et a módsrt angolul Mastr-Slav Tach-n (mstr-solga btanítás) névn mlítk. Indrkt btanítás (Indrct Tach-In, vag gsrűn Tach-In): Eg ké vérlőbrndés sgítségévl a robotot a pála léngs pontjaba mogatjuk, és k hltét mmoráljuk. A robot fladata ls a pontok köött pála mgtrvés és ksámítása. 6
: Olan hlkn alkalmaák, ahol a robot foltonos pálaránítással vag sbsségvérléssl mogatja a srsámot,")
7 . Offln programoás Offln programoásnál a robot működésénk dfnálása általában valamln magas sntű nlvn történk. A program mgírása lőtt mndn stbn b kll tápláln a bjárandó mogáspála ktüntttt pontjat. E történht onln btanítással, vag a robottól tljsn függtlnül, sövgs vag grafkus adatbvtlll. Bár a TCP hlténk és orntácójának lírásáho lég a robot ültnk aktuáls állását rögítn, a programoó sámára nm lég smlélts, és nhn ksámítható. Éppn ért a robot munkakörntébn különböő koordnáta-rndsrkt dfnálunk, és a pontokat kr vonatkotatjuk. A. ábra néhán általánosan hasnált koordnáta-rndsrt mutat b.. ábra A vlág (vag bás) koordnáta-rndsr a tljs munkatrült alapkoordnátarndsr. A TCP mogását a gsrűbb stkbn rr vonatkotatjuk. A robot alap-koordnátarndsrét lgtöbbsör a könnbb sámolás kdvéért a vlág koordnáta-rndsrrl aonosnak tkntjük. a több 7

8 robot dolgok gütt a munkatérbn, akkor prs nm mgvalósítható. A munka vag más névn aktuáls koordnáta-rndsr a éppn végtt munkafolamat alapját jlöl. Ehh a koordnáta-rndsrh rndlhtjük a munkadarabok hltét. A munkadarabokho tovább koordnáta-rndsrkt s rndlhtünk. TCP (srsám) koordnáta-rndsr: poícója és orntácója a vlág koordnáta-rndsrh képst gértlműn dfnálja a srsám hltét. A TCP koordnáta-rndsrbn ksámíthatjuk a mgfogandó munkadarab távolságát és mgkölítés ránát. A off-ln programoás lltv a sabadon dfnált koordnáta-rndsrk hasnálata több olan lhtőségt nújt, amlt a gsrűbb programoás módok nm btosítottak: A pála algortmkus módsrkkl sámítható, íg könndén bprogramohatunk olan cklkusan váltoó paramétrű folamatokat, mnt például a rácssrűn lhlkdő furatok gmás után lkésítés. A térpontok hltét mndg csak abban a koordnáta-rndsrbn kll mgadnunk, amlkbn a a lgsmléltsbb, a lgkönnbbn sámítható. Eg, a munkadarabon lvő luk hltét a lglogkusabb magáho a munkadarabho lltv a hoá rndlt koordnátarndsrh vsonítan. a a munkadarab valamln mogást vég, annak mogásának alapján a későbbkbn tárgalt módsrkkl a luk mogása s vsonlag könndén mghatároható bárml vonatkotatás rndsrbn. A mogások dfnálása s smléltsbbé válk, ha a mgfllő koordnáta-rndsrr vonatkotatjuk őkt. A. ábra a srsám smsögéből lvéghtő modulatokat mutatja b: k a TCP koordnáta-rndsrbn történő gsrű ltolások és lforgatások rdmén. 8

9 . ábra A koordnáta-rndsrknk nm kll fltétlnül dréksögűnk lnnük. a a robot gomtrája mást kíván mg, alkalmahatunk hngr- vag gömb koordnáta-rndsrkt s (RTT lltv RRT karoknál). 4. Poícó és orntácó mghatároása a g srsámnak vag munkadarabnak mg akarjuk adn a pontos hltét g bonos koordnáta-rndsrbn, akkor grést a térbl poícóját, másrést a orntácóját (ránítottságát) kll mghatáronunk. Ennk érdkébn a tárgho kll rndlnünk g saját koordnáta-rndsrt, és nnk a koordnáta-rndsrnk a alap-koordnátarndsrh vsonított poícóját lltv lfordulását kll sámsrűlg mgadnunk. A kövtkőkbn a robotkában általánosan hasnált hlt-mghatároás módokat tárgaljuk. 4. Poícó mghatároása hngrkoordnátákkal Eg pontnak (vag g koordnáta-rndsr orgójának) hltét mgadó három hngrkoordnáta jlntés a kövtkő (4. ábra): 9

10 r : a tngltől való távolság : a tnglű, r sugarú körön történő lfordulás mérték h : a alapsíktól való távolság h r 4. ábra 4. Poícó mgadása gömbkoordnátákkal A gömb-koordnátarndsrbn a kövtkők srnt alakulnak a gs koordnáták (5. ábra): r : a pontnak a orgótól mért távolsága : a pontba mutató vktor síkbl vtülténk a lfordulás sög : a vktor tngltől mért lhajlásának a sög r 5. ábra

11 4. Orntácó mgadása Eulr-sögkkl Forgassunk l g koordnáta-rndsrt a tngl körül söggl (6. ábra)! =' ' ' 6. ábra Most a lforgatással kapott tngl körül forgassuk tovább söggl (7. ábra)! '' =' '' '='' ' 7. ábra Eután körül forgassunk söggl (8. ábra)!
! '' =' '' '='' ' 7.")
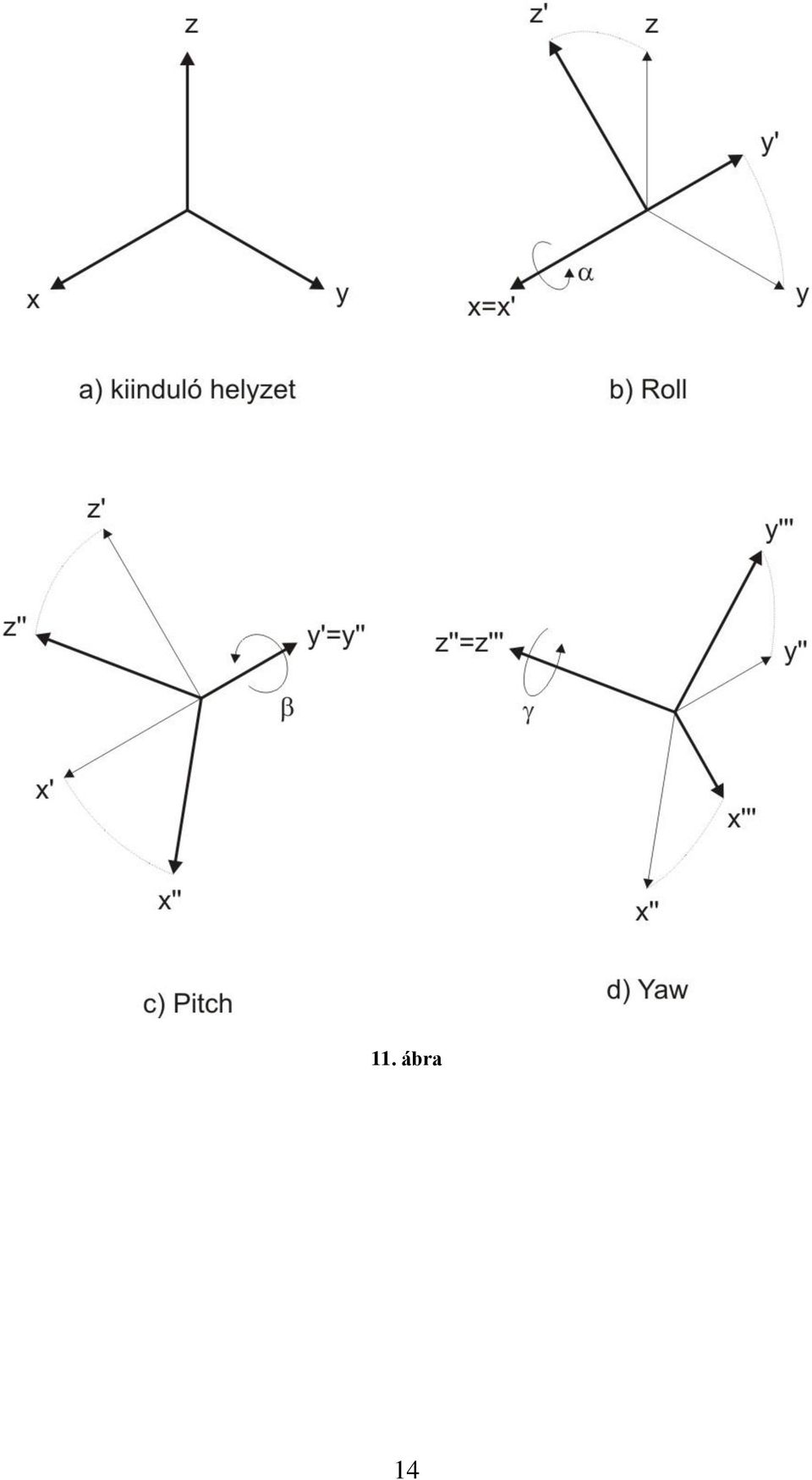
12 ''=''' =' ''' '' ' '='' ''' 8. ábra A -- és a - - koordnáta-rndsrk (íg ttsőlgs két koordnáta-rndsr) orntácójának vsonát gértlműn mgadja a,, sámhármas. Ekt a sögkt Eulr-sögknk nvük. 4.4 Orntácó mgadása roll-ptch-aw (bllnés-bólntás-lfordulás) transformácókkal Eg plóta a rpülőgépénk haladás ránát a kövtkőképp váltotathatja mg (9. ábra): A ún. csűrőlapokkal mgbllnt a gépt annak hosstngl körül (roll); a magasság kormánnal bólntásra késtt, a sárnak által kfsíttt oldalránú tngl körül (ptch); a oldalkormánnal a függőlgs tngl körül fordítja l a rpülőt (aw).
 transformácókkal Eg plóta a rpülőgépénk haladás ránát a kövtkőképp váltotathatja")
13 9. ábra E g léggé smlélts módsr, íg a robottchnkában s ltrjdt: például a mgfogó vag srsám ránultságának mgadásáho a vlág koordnáta-rndsrh képst (. ábra).. ábra A roll-ptch-aw forgatások rndr a,, tngl körül történnk majd sögkkl (. ábra).

14 . ábra 4
15 5. omogén transformácók A fnt módokon képsk vagunk g tárg poícóját és orntácóját külön-külön mgadn. A homogén transformácók hasnálatával t gsrr, gtln matmatka formulában s mgthtjük. Látn fogjuk, hog a homogén transformácók módsrévl a robottchnkában flmrülő össs gomtra fladatot kln tudjuk. Vgünk két koordnáta-rndsrt! A O orgójú koordnáta-rndsr hltét akarjuk mgadn a Oa alaprndsrh képst (. ábra). k o o a. ábra A poícót a k vktor dfnálja. Flírhatjuk mátros alakban k alaprndsrbl koordnátát: k k k. () k A orntácó g háromsor hármas, ún. forgatómátrsal jllmhtő. A forgatómátr a alaprndsr,, ránara vtt vtültnk értékt tartalmaa. Más sóval a mátr három oslopa sorra a,, vktorokat írja l úg, mntha a alap koordnáta-rndsr orgójából ndulnának k. 5
 k A orntácó g háromsor hármas, ún. forgatómátrsal jllmhtő. A forgatómátr a alaprndsr,, ránara vtt vtültnk értékt tartalmaa.")
16 6 R. () Amnnbn a két mátrot gtln, homogén transformácós mátrba rndük a alább módon: k k k k k R, () akkor bárml O koordnáta-rndsrbl pont hlt ksámítható a alaprndsrbn (. ábra), a kövtkő formulával: p r, vags p p p k k k r r r. (4) k o a o p r p. ábra 5. Példa homogén transformácók alkalmaására lünk l a 4. ábra srnt g trm két sarkában g-g koordnáta-rndsrt; a alaprndsr lgn a nnnső sarkon. A túlsó

17 7 koordnáta-rndsrh képst dfnáljunk g P pontot. atárouk mg a P pont alap-koordnátarndsrbl poícóját! 6m 4m m,5m m O a P 4. ábra Mgoldás: A mgoldásho a (4) gnltt kll flhasnálnunk: p p p k k k r r r. (5) A gnlt ktöltéséh lősör határouk mg a P pont koordnátát a távol koordnáta-rndsrbn. E ug nm más, mnt a orgótól mért távolsága sorra a,, ránban:,5 p p p p. (6) Másodkként határouk mg a transformácós mátrot. A távolabb koordnáta-rndsr a alaprndsr gségvktoranak ránában a kövtkő mértékbn van ltolva:
 Másodkként határouk mg a transformácós mátrot.")
18 8 4 6 k k k k. (7) A orntácós mátr flírásában sgít a 5. ábra. Rajoljuk fl a két koordnáta-rndsrt köös orgóval, és olvassuk l a, majd a és vktorok koordnátát a alaprndsrbn. O a 5. ábra R. (8) Íg már mg tudjuk oldan a mátr-gnltt:,5 6,5 4,5 6,5,5 4 6 r r r. (9) Vags a koordnáták: 6;,5 lltv, am a ábráról s könnn llnőrhtő. 5. Példa: slárd tst mogatása Forgassunk l g hasábot a 6. ábra srnt módon! Sámítsuk k a hasáb csúcsanak lmodítás után koordnátát a Oa alaprndsrbn!
 Vags a koordnáták: 6;,5 lltv, am a ábráról s könnn llnőrhtő. 5.")
19 9 O a ' ' ' ' 5' 4' ' 6. ábra A csúcsok rdt koordnátá: Cs ; Cs ; Cs ; 4 Cs ; 5 Cs ; 6 Cs. Mgoldás: Írjuk fl a lmodítás homogén transformácós mátrát! A tsth rögíttt koordnáta-rndsr orgója a kövtkő hlr krült ((4) jlölésvl) : 45 sn cos 45 k. () A forgatómátr (a - síkban -5 o -os forgatás történt): 45 sn 5 sn 45 cos 5 cos ' ' ' R, íg ()
 jlölésvl) : 45 sn cos")
20 . () A csúcsok a koordnáta-rndsrrl gütt modultak l, ért a koordnáták hh képst nm váltotak. A (4) gnltt hasnálva a össs lmodított csúcs új koordnátá mgkaphatók a alap-rndsrbn: ' Cs Cs, =..6. () A gsrűség kdvéért hlük a össs csúcsot gtln mátrba: Cs Cs Cs Cs Cs Cs Cs, l (4) ' Cs Cs (5) A mátr oslopa sorra a gs csúcsok új koordnátát adják. A ábra alapján s llnőrhtő.
 ' Cs Cs (5) A mátr oslopa sorra a gs csúcsok új koordnátát adják.")
21 6. Rlatív transformácók Mnt arról már korábban só volt, a alap- (vlág) koordnáta-rndsrn kívül más koordnáta-rndsrkt s hasnálunk a robotmanpulácós fladatoknál. Eknk a koordnáta-rndsrknk csak némlk van a alaprndsrh képst dfnálva. Eg tárgon lhlkdő furatok hltét a tárgho rögíttt koordnáta-rndsrbn célsrű mgadn, a tárg koordnáta-rndsr a munka koordnáta-rndsrh vsonított, és csak a rndsr van (stlg) kövtln kapcsolatban a vlág koordnátarndsrrl. A rlatív transformácók sgítségévl bárml két kövtttn kapcsolódó rndsr gmásho vsonított kövtln hlt s ksámítható. Vgünk három koordnáta-rndsrt: A-t, B-t és C-t! B hltét A-ho képst smrjük, C hltét B-h képst (7. ábra). A alsó ndk a vsonítás rndsrt jlölk. ogan tudjuk g C-h képst dfnált pont hltét mgadn A-ban? B P B A C B C p C A 7. ábra A (4) gnlttl mghatárohatjuk P hltét B-bn (8. ábra): p C p, (6) B B C
22 B p B P B A C B C p C A 8. ábra majd a kapott rdmént flhasnálva P hltét A-ban (9. ábra): p A B p. (7) A B B p B P B A p A A 9. ábra A két sorást gtln gnltb s írhatjuk: p A B C p. (8) A B C B C és össsorásával mgkapjuk a A és C koordnáta-rndsr A C B vsonát líró transformácós mátrot (. ábra): C A B C, íg (9) A B p C p. () A A C
23 B A B C B C A C A. ábra A (9) össfüggés úg s flírható, ha a ábrán a kdőpontból (A) a végpontg (C) kövtjük a nlakat, sorra össsorouk a gmás után kövtkő mátrokat, és a párhuamos nílfolamok soratat gnlővé tssük gmással. A. ábra mutatja nnk általánosítását: B A B C B C D C D A E A E D E. ábra D A B C D E D. () A B C A E Vajon hogan oldható mg a fladat, ha nm C-t dfnáltuk B-h képst, hanm fordítva: B-t C-h képst (. ábra)?
24 A B A B C A B C C. ábra A ábra srnt: C B B, () A C A átrndv: B C B, () A A C vags a nlak g nvr képéssl mgfordíthatók, és íg a lánc gránúvá thtő (. ábra). A B A B C A ( B C) - C. ábra A 4. ábrán a A és D rndsrk köt vson flírásáho két utat válasthatunk, g-g nvrtálással (4. gnlt): 4
25 5 A A C D E B B C B D C E A E D 4. ábra E D E A D C C B A B D A. (4) Könnn blátható, hog módsrrl bárml két koordnáta-rndsr vsonát mghatárohatjuk. 6. Példa: rlatív transformácók sámítása Mk lsnk a 5. ábrán látható tst csúcsanak koordnátá a alaprndsrbn, ha a koordnáta-rndsrk kapcsolatát líró homogén transformácós mátrok a alábbak: 6 8 m a, m t.
26 6 5. ábra Mgoldás: Mndnklőtt k kll sámítanunk a tárg (t) koordnáta-rndsr alapkoordnáta-rndsrbl hltét mgadó transformácós mátrot. Ehh nvr képésr ls sükség, amt a homogén transformácós mátrokra érvéns spcáls gnlőséggl lht gsrűn mghatáron: k k k k T T T T T T. (5) Et flhasnálva a krstt transformácós mátr:
27 7 ) ( m t m a t m m a t a (6) A csúcsok rdt koordnátá: t Cs, íg a csúcsok alap-koordnátarndsrbl koordnátá: t t a a Cs Cs. (7) 6. Példa: a transformácós mátr és a orntácós sögk vsona Robottchnka fladatoknál soksor lőfordul (jln jgtbn s többsör sükségünk ls rá), hog a roll-ptch-aw vag Eulr-fél orntácós sögkből mg kll határonunk a lforgatásokat líró rdő transformácós mátrot, lltv g forgatómátrból a orntácós sögkt. A kövtkő két példa knk a mntét mutatja b.
28 6.. A roll-ptch-aw transformácó mátros alakban történő mgadása A roll bllnés a körül sögű lforgatás rdmén (8. ábra). 6. ábra A t líró forgatómátr: R( ) cos sn. (8) sn cos A ptch bólntás a lforgatott koordnáta-rndsr tngl körül forgatást jlnt söggl (7. ábra). 7. ábra 8
29 A forgatómátr: cos sn R ( ). (9) sn cos A aw lfordulás a tngl körül történk söggl. A tngl váltoatlan marad, és tnglk koordnátá pdg a 6. ábra srnt alakulnak ( a lapból kflé mutat). 8. ábra Íg a forgatómátr: cos sn R( ) sn cos. () A rdő forgatómátr a gmás után kövtkő rlatív transformácók mátrának sorata, d vgáunk: a soratban mgfordul a transformácók sorrndj. Elősör ugans a roll forgatást végük l, és nnk rdménét sorouk b a rlatív transformácóknak mgfllőn balról a ptch, majd a aw transformácók mátrával. R(,, ) R( ) R( ) R( ) cos cos cos snsn sn cos cos sncos sn sn sn cos sn sn sn cos cos sn sn cos cos sn. () sn cossn coscos 9
30 A roll-ptch-aw művltt líró homogén transformácós mátr thát: (,, ) cos cos cos sn sn sn cos cos sn cos sn sn sn cos sn sn sn cos cos sn sn cos cos sn sn cos sn cos cos. () 6.. A roll-ptch-aw sögk ksámítása a rdő homogén transformácós mátrból Ebbn a stbn a roll-ptch-aw lforgatások rdmén smrt a alább mátr alakjában (a. ábra jlölésvl): R. () A sögkt a alább mátr-gnlt mgoldása adja: R(,, ) cos cos cos snsn sn cos cos sncos sn sn sn cos sn snsn cos cos sn sncos cos sn. sn cossn coscos (4) Abban a stbn, ha cos, a másk két sög könnn ksámítható a mátrok aonos hln álló tagjanak gnlőségb írásával: cos cos, (5) sn cos, (6) amlkből: arctan, (7)
31 és hasonlóan: cossn, (8) coscos, (9) arctan. (4) érték pdg: arcsn( ). (4) Amnnbn cos, a koordnáta-rndsrt 9 -kal forgattuk l, és g síkba krül (vö. a. ábrával), íg össgük vag különbségük határoa mg a lfordulást. a l (9. ábra). A ábra alapján: 9, akkor sögbn fordul arctan. (4) 9. ábra a lfordulása llnkő ránú (. ábra), thát: 9, a Yaw ( ) lforgatás a Roll ( ) forgatással
32 arctan. (4). ábra 6. Vuáls nformácó fldolgoása A robot látótréb krülő munkadarabok pontos hlt nm mndg adható mg lőtsn (például a robotnak g futósalagra öss-vssa lhltt alkatréskt kll a mgfllő hln és módon mgragadna). E stbn g par kamra (és bonos képfldolgoó softwar-k) sgítségévl mghatároható a tárgak poícója és orntácója. A. ábra g olan lrndést mutat, ahol g smrt poícójú rfrncatárg kamrabl kép alapján lősör magának a kamrának a hltét sámítjuk k (rr prs rögíttt kamra stén nncs sükség), majd a vsgált tárgat s tartalmaó képt fldolgova határouk mg a tárg koordnátát.
33 k k a rt k t k a rt a t a rt t. ábra rt a k rt, íg (44) a k rt k rt. (45) a a k El mgvan a kamra hlt. A tárg transformácós mátra pdg: t a k a t k rt a rt t k k. (46) 6.4 Pálapontok sámítása rlatív transformácókkal Mnt arról már mlítést tttünk, PTP (Pont-To-Pont) programoásnál a TCP által bjárt pálának csak bonos pontjat kll mgadnunk, a kötük bjárt utat a robotránító sámítógép határoa mg. E térpontokat a lggsrűbb ké vérlőgséggl, on-ln flvnn, ám soksor a módsr nm lég pontos kkor a munkatérbn lvő különböő objktumok hlténk smrtébn k kll sámítanunk a kívánt poícókat. A pálának n sarokpontjat soksor a mogatn, mgmunkáln kívánt munkadarabho képst kll dfnáln, például a munkadarab mgkölítésénél vag mgfogásánál. Mvl a alkatrésk hltét s rlatív transformácókkal írjuk fl, célsrű a pálapontok sámításánál s t a módsrt kövtnünk. Lássunk rr g példát!
34 . ábra A. ábrán látható lrndésbn g csúsdás adagolóról kll a kockákat rácssrűn lhlkdő nílásokba (ún. palttába) átrakosgatn. Ismrjük a adagoló hltét, a lgalsó kocka lhlkdését a adagolón (kmléskor a kövtkő kocka csúsk nnk a hlér), a rácsot magában foglaló krt hltét, és sámítással mghatárohatók a rácspontok koordnátá. Vgük sorra résltsn a smrt adatokat (sámsrű értékk nélkül): A vlág koordnáta-rndsr a gsrűség kdvéért mggk a robot alap-koordnátarndsrévl (Ov). A adagoló koordnáta-rndsrénk és a vlág-koordnáta-rndsrnk a vsona: ad v (. ábra). 4
35 v k O v v ad O k k cél O cél O ad. ábra A lgalsó kocka mgfogó pontjának (Grp Pont ahol a TCP-nak kll lnn, ha stablan mg akarjuk ragadn) kndulás állapotban a st adagolóho vsonított hlt: (4. ábra). ad 5
36 O st st ad O ad 4. ábra A krt koordnáta-rndsrénk a vlág koordnáta-rndsrh vsonított hlt: k. v A lglső nílásba hltt kocka mgfogó pontja a krt rndsrébn (tt aért van sükség koordnáta-rndsrr, és nm csak g vktorra, mrt a kocka ránultságát s mg akarjuk adn a cél állapotban), a. ábra srnt: cél k. A több nílással most n foglalkounk! Ennt smrünk thát. ogan jutunk l n adatokat flhasnálva a robot bprogramoáság? 6
37 . lépés: A robot által végtt mogássoroat kdolgoása A lvégndő fladatot végggondolva a pála jllgts pontja a kövtkők lsnk (5. ábra):. poícó. poícó. poícó 4. poícó 5. poícó 6. poícó 5. ábra A mogássoroat a alábbak srnt alakul:. fás: a munkadarab mgkölítés ttsőlgs görbéjű pálán (a. poícóba jutás). 7
38 . fás: lmodulás a mgfogó-poícóba. A. poícóból gns vonalú mogással kll a. poícóba érknünk.. fás: a munkadarab kmlés (sntén gns vonalban a. poícóba). 4. fás: lfordulás a paltta fölé (ttsőlgs görbén a 4. poícóba). 5. fás: a munkadarab lukba hlés (lnárs pálán a 5. poícóba). 6. fás: ltávolodás a palttától (gns vonalban a 6. poícóba).. lépés: A TCP hlténk ksámítása a pála sarokpontjan A össs mghatároó poícóban k kll sámítanunk a TCP hltét a robotkar alap-koordnátarndsrébn (aml stünkbn mggk a vlág koordnáta-rndsrrl). A TCP mndnkor hltét lgpontosabban a smrt adatokból rlatív transformácókkal határohatjuk mg. Ehh a sükségs, hog a TCP-h s rögítsünk g koordnáta-rndsrt a kövtkő sabálokkal (6. ábra): A Z tngl a mgkölítés ránába mutat. A X tngl a gk ujjtól a másk flé (mndg, hog mlktől mlkg, d a sámítások során végg aonos módon). A Y tngl a jobbsodrású rndsr gomtrája srnt a X és Z tnglk hltéből adódk. 6. ábra 8
39 A TCP hltét a alap és a TCP koordnáta-rndsr vsonát líró TCP v transformácós mátr alakjában krssük, mndn gs mghatároó pálapontban. Lássuk hát:. poícó (a munkadarab mgkölítés): v TCP () O TCP O v TCP st v ad O st st ad O ad 7. ábra Mnt tudjuk, ad a adagoló hltét adja mg, v st pdg a lgalsó ad kockáét a adagolóho képst. TCP st -vl at dfnáljuk, hogan kölíts mg a mgfogó a kockát a lső poícóban. a például 5 mm-r akarjuk mgkölítn, akkor a t líró mátr a kövtkőképp né k (a nd a poícót jlöl): TCP st (). (48) 5 Ek alapján: TCP ad st TCP () (). (47) v v ad st 9
40 . poícó (a munkadarab mgfogása): TCP Itt a TCP és a kocka mgfogó pontja gbsk, íg () a lőő ábra srnt: TCP st (), (49) a képlt pdg váltoatlan marad (47. gnlt): TCP ad st TCP () (). (5) v v ad st st. poícó (a munkadarab lmlés a adagolótól): E tljsn mggk a. poícóval: TCP TCP () (). (5) v v 4. poícó (a robot lfordult a paltta fölé) v k O v v TCP (4) O TCP TCP cél O k k cél O cél 8. ábra TCP k cél TCP (4) (4). (5) v v k cél 4
41 Lgn a mgkölítés mérték tt s 5 mm, íg TCP cél (4). (5) 5 5. poícó (a kocka célhltb rakása) A cél és TCP koordnáta-rndsr orgója gbsk, ért: TCP cél (5), (54) a képlt pdg a 4. poícó srnt: TCP k cél TCP (5) (5). (55) v v k cél 6. poícó (lmlkdés a palttától) E a hlt a 4. poícóval tljsn mggk. TCP TCP (6) (4). (56) v v. lépés: A robot programoása Lglősör s a ksámított poícókat kll btáplálnunk a vérlőgségb. A fjlttbb vérlő sámítógépk több sá térpont bvtlét s mgngdk. A TCP hltt általában nm transformácós mátr, hanm -- (poícó) és roll-ptch-aw (orntácó) sámhármasok alakjában kll btáplálnunk. A konvróra már láthattunk példát a 6... fjtbn. 4
42 Most néünk lősör g gsrűbb programot a lőbb mogássoroat lvégésér, majd g bonolultabbat, aml nm csak gtln kockát mogat, hanm a paltta rácspontjanak ksámításával a össs kockát mgfllő sorrndbn átpakolja. Mndkttő g séls körűn hasnált magas sntű programnlvn, MELFA-BASIC-bn íródott. A gsrűbb program A programban olan utasítások srplnk, amlk a robot lm mogásat btosítják. Nm hasnálunk cklusokat, lltv magas sntű programnlvkbn btosított géb funkcókat. E a lggsrűbb robotprogramoás mód. A fnt ksámított poícók köül P-től P4-g van sükségünk, kt lőr btápláltuk a sámítógépb. A gs utasítások jlntés a kövtkő: DEF: DEFnton, váltoó dfnálása OPEN: and OPEN, ké kntása CLOSE: and CLOSE, ké össárása MOV: MOV, mogás csukló ntrpolácóval MVS: MoV Straght, gns vonalú mogás END: END, bfjés 5 DEF P,P,P,P4 ** a btáplált pontok dfnálása OPEN ** a(.sámú) ké kntása MOV P ** TCP mogatása a P poícóba MVS P ** TCP gns vonalú mogatása P-b 4 CLOSE ** a ké össsorítása (mgfogás) 5 MVS P ** a kocka kmlés 6 MOV P ** át a paltta fölé 7 MVS P4 ** a kocka lukba hlés 8 OPEN ** a kocka lngdés 9 MVS P ** ltávolodás a palttától END 4
43 A bonolultabb program Mvl a robotmanpulácós fladatok során gakran találkounk palttákkal (rácssrűn lhlndő alkatréskkl), a MELFA-BASIC programnlvbn külön utasítások sgítk k hasnálatát. Például nmcsak gsrű váltoókat, térpontokat, hanm palttákat s dfnálhatunk a kövtkő módon (a 9. ábra jlölésvl, ahol a P-vl jlölt térpontokat a pálapontokho hasonlóan lőr dfnáljuk g,, sámhármassal és ttsőlgs orntácóval): DEF PAL <paltta sáma>,p st,p,p,p átló,,4,<sorrnd> Pst P Sorok sáma: Oslopok sáma: 4 P Pátló 9. ábra A paltta 4. pontjára pdg gsrűn utalhatunk: pont_of_paltt=plt <paltta sáma>,4 A MELFA-BASIC-bn utasíthatjuk a robotot arra s, hog bonos mértékbn kölítsn mg g pontot: MVS P,5 ** P mgkölítés 5mm-r, gns vonalban En flül még találkohatunk a magas sntű nlvkbn mgsokott cklusokkal, függvénkkl, stb. Mndn tulajdonságok jlntősn mgkönnítk a robot programoójának a munkáját. Lássuk hát a tljs programot! 4
44 DEF PLT,PST,PX,PY,PATL,,4, ** A paltta dfnálása DEF INTE ** Cklusváltoó dfnálása DEF POS PPaltta ** Paltta poícó dfnálása 4 OPEN ** Ké ntás 5 FOR = TO 8 ** 8 kockát fog a robot mogatn 6 MOV P,-5 ** A adagolóban lvő lgalsó kocka fölé hlkdés 5 mm-r 7 MVS P ** Lnárs mogás a mgfogó pontba 8 CLOSE ** A kocka mgfogása 9 MVS P,-5 ** Flmlés PPaltta = PLT, ** A lső rácspont sámítása MOV PPaltta,-5 ** Átfordulás a paltta fölé MVS PPaltta ** Rácspontra mogatás OPEN ** Rácspontra hlés 4 MVS PPaltta,-5 ** A ürs mgfogó flmlkdk 5 NEXT ** FOR cklus vég 6 END 44
45 7. A robotkar gomtrája A ddgkbn lírtuk, hogan határohatja mg a robotot bprogramoó sakmbr a kívánt fladatnak mgfllő pálapontokat és a TCP pontos mogását. Ek után a robot vérlőgségén van a sor, hog a fnt nformácókból lvénlj a robot gs résnk össhangolt működését. A vérlés fladat mgtrvéséh mndnk lőtt sükségünk van a robotkar gomtra flépítésénk gakt lírására. A robotkarok a mbr karho hasonlóan ültk és kartagok láncából állnak. A ültk forgó vag csúsó mogásra képsk, és mndgkük kövtln kapcsolatban van a robothajtás g mogató lmévl (pl. motorral). A forgó ültknk két fajtája van: csavaró lltv bllnő (4. ábra). A robot mogatása vag mgfllő hltb való állítása gakorlatlag a ültk poícójának (forgó ültknél a lfordulás sögénk, csúsónál a lmodulás mértékénk) a sabáloását jlnt. Eg adott poícóban lvő tárg ttsőlgs ránból történő mgfogásáho 6 sabadságfokú robotkar sükségs ( térkoordnáta + orntácós sög). Mnd lgalább hat, gmástól függtln ültt génl. a g manpulácós fladat nm kövtl mg a munkadarab ttsés srnt forgatását, akkor lég 5 vag nég ültből álló kar munkába állítása s (ld. 4. ábra). 45
46 4. ábra 46
47 7. A Dnavt-artnbrg transformácó A sámítások gségssé tétl matt a robotkar gomtrájának lírásánál s a homogén transformácós módsr hasnálata javasolt. a mndn gs ülth g-g koordnáta-rndsrt rndlünk, és sorra lírjuk a gmást kövtő koordnáta-rndsrk köött transformácós mátrokat (vags hogan áll a. ült a --h képst), akkor l a gés kar poícóját mgadhatjuk. Fontos, hog a koordnáta-rndsrk hoárndlés mndg uganaon lv srnt történjn, és hog a ült sögk és csúsó ültk stén a lmodulások a lhtő lggsrűbb formában srpljnk a transformácós mátrokban. Célsrű továbbá olan módsrt krsnünk, amlll a robot gomtrája snt ránéésr mátros formába írható. Mndn lvkt gsít a Dnavt-artnbrg fél lírás mód:. lépés: A koordnáta-rndsrk ültkh rndlés A hoárndlésnél a kövtkő sabálokat kll kövtn (4. ábra): tngl lgn a. ült forgás-tngl, csúsó ült stén a lmodulás tngl. tngl a - és a tngl köös normálsának ránába mutasson. (A köös normáls a mndkét térbl gnsr mrőlgs sakas) A -k koordnáta-rndsr orgóját a (-)-k és -k ült tngl köös normálsának és a -k ült tnglénk mtséspontjába hlük. Párhuamos forgástnglk stén végtln sok köös normáls állítható. Ebbn a stbn at a köös normálst válastjuk, amlk a mglőő ülth rndlt koordnáta-rndsr orgóján halad át. Egmást mtső tnglknél a koordnáta-rndsr orgója a tnglk mtséspontja, a tngl ránultsága pdg a - vktoráls sorat által rdméntt vktorral párhuamos. 47
48 + - + KN KN ábra. lépés: A koordnáta-rndsrk vsonának mghatároása A (+)-k koordnáta-rndsr vsonát a -kh képst nég értékkl dfnáljuk (4. ábra): lfordulás vags a -k ült tngl körül söggl, lmodulás mntén b távolsággal, lmodulás + mntén a távolsággal, lfordulás + körül söggl. 48
49 b a 4. ábra A fnt nég transformácót líró mátrok sorra a kövtkők: cos sn sn cos ) (, (57) ) ( b b, (58) ) ( a a, (59) cos sn sn cos ) (. (6)
50 Ek rdő transformácója pdg: cos sn ( ) ( b ) ( a ) ( ) sn cos cos cos sn sn sn cos sn cos a cos a sn b. (6) Vlágosítsuk mg a ddgkt g példával! Rndljünk a 4. ábrán látható KUKA KR5 típusú robotho koordnáta-rndsrkt, és írjuk fl a koordnáta-rndsrk vsonát! -6 ült váltoók a gs ültk lfordulás sögét jlölk a níl ránában. Értékük a ábrán bmutatott hltbn rndr nulla, kvév 5-öt, aml 9 o. 5
51 4. ábra A koordnáta-rndsrk és a transformácós értékk a fnt prspktvkus kép néőpontjából a 44. ábra srnt alakulnak. 5
52 4 = o = 4 4 = 4 +8 o o 4 o a = b = =9 o 4 b 4 =D 5 6 b 5 = o 6 o 5 a 5 = a 4 = 4 =9 o = 5 +8 o a =C 5 =9 o b 6 =E 5 6 o TCP 6 = 6 a 6 = TCP TCP a =B =9 o = +9 o 6 = o TCP o b =A b = o = 44. ábra Láthatjuk, hog a sögk és a ült sögk g-g konstans nagságú ltéréstől ltkntv mggnk. A 5,a, b váltoók gsrű kapcsolatba hohatók a robot gomtra flépítésénk jllgts mérősámaval. Mnd a látsólag bonolult ábra llnér vsonlag
53 gsrű transformácós mátrokat rdmén. A. tábláatban soroltuk fl a kapott össfüggéskt o 4+8 o 5+8 o 6 b A D E a B C 9 o 9 o 9 o 9 o. tábláat A tábláat lmt a (6) gnltb bhlttsítv flírhatjuk a mátrokat. (6-65) aonosságokat flhasnálva: sn( 9) cos, (6) cos( 9) sn, (6) sn( 8) sn, (64) cos( 8) cos, (65) cos sn B cos cos sn B cos sn cos Bsn sn cos Bsn A A, (66) cos sn sn cos C cos sn C sn cos cos sn C sn C cos, (67) 4 cos sn sn cos cos sn sn cos, (68) 5
54 54 cos sn sn cos cos sn sn cos D D, (69) cos sn sn cos cos sn sn cos , (7) cos sn sn cos cos sn sn cos E E TCP. (7) 7. A robot-gomtra drkt fladata A vérlőgség lgalapvtőbb sámítás fladata a, hog a ült sögkből és lmodulásokból mghatároa a TCP hltét (a robot alapkoordnátarndsrébn). Et nvük a robot-gomtra drkt fladatának. A gakorlatban mgkívánt sámítás aonban nnk éppn a fordítottja, vags a, hog a TCP hltéből mghatárouk a ült sögkt és lmodulásokat, s által a robotot a mgfllő poícóba állíthassuk. E a robot-gomtra nvr fladata. A drkt fladat mgoldásáho rndlkésünkr állnak a gmást kövtő ült koordnáta-rndsrk vsonát líró transformácós mátrok. A rlatív transformácókat tárgaló résbn tanultak alapján könndén flírható a TCP-ho tartoó koordnáta-rndsr hlt: TCP TCP , (7) ahol fltétltük, hog a alap-koordnátarndsr gbsk a lső ülth rndlt koordnáta-rndsrrl, és a robotkar 6 sabadságfokú. A fnt művlt 6 sorást és 45 össadást génl. Et a sámítás mnnségt a művltk mgfllő csoportosításával csökkntn lht.
55 7. A robot-gomtra nvr fladata Többfél módsr létk a ült sögk mghatároásáho a TCP hlténk smrt alapján (nvr fladat). A sámítások soksor bonolultak, és a kapott rdménk nm gértlműk: van, hog uganat a TCP hltt a ült sögk más-más kombnácó s lőállíthatják, s k köül stlg a munkatér adottsága alapján kll válastanunk. Általánosan hasnálható mgoldás módok nmgn létnk, nkább csak sémák, útmutatók. Mndn gs robotra mg kll találn a flépítéséből adódó lggsrűbb sámítást; éppn ért a kövtkőkbn g konkrét példát smrttünk. A olan flépítésű robotkarok, mnt a már bmutatott KUKA KR5 különlgs adottsága a, hog a utolsó három ült forgástngl g pontban, a csuklóban mts gmást (45. ábra). E mgkönnít a dolgunkat: a hat smrtlns gnltrndsrt két darab három smrtlnsr tudjuk bontan. A csukló koordnátát ugans a TCP hlt gértlműn mghatároa; a csukló poícója pdg csak a,, ült váltoóktól függ. A másk három váltoó sámítása a orntácós sögk sámításáho hasonló: a csukló tövéh képst úg kll bállítanunk 4,5,6-ot, hog a mgfogó a kívánt ránba nén. 45. ábra 55
56 A robotkar flépítés g tovább könnbbséggl solgál: a csukló vísnts síkú poícójából kövtlnül sámítható. A csukló függőlgs poícóját és össg határoa mg.. lépés: a csuklópoícó sámítása A 46. ábra mutatja a TCP és a csukló vsonát a orntácós sögk függvénébn. A raj alapján cs,cs,cs csuklókoordnáták a kövtkőképp sámíthatók: cs cs cs E cos sn, (7) TCP E sn sn, (74) TCP E cos. (75) TCP 46. ábra 56
57 . lépés: sámítása A csuklónak a alap-koordnátarndsr tngl körül vísnts síkban történő lfordulása kárólag függvén. A 47. ábra srnt: cs arctan, ha a csukló a I. vag a IV. térngdbn van, (76) cs 8 arctan cs cs, ha a csukló a II. lltv III. térngdbn tartókodk. (77) cs csukló o cs 47. ábra. lépés: és sámítása Véggböngésv a 48. ábrát, és gomtra össfüggésk alapján ksámíthatók. 57
58 48. ábra a cosnus-tétl srnt nrhtő: S C D CDcos( 9 ), ahol (78) S ( cs ) ( cs ) ( cs ), továbbá (79) Bcos, (8) Bsn, (8) A. (8) két sögr bontható:. (8) ksámítása -ho hasonlóan: D C S CS cos, (84) érték pdg: 58
59 U arctan, lltv (85) T U 8 arctan, ha a csukló a B kartag fölé krült (T ngatív). (86) T A még hánó értékk: U cs, (87) T cs cs ( ) ( ). (88) 4. lépés: 4, 5 és 6 ksámítása A robot utolsó három ült tngl g pontban mts gmást, íg a TCP TCP (89) mátr formalag aonos ls aokkal a transformácós mátrokkal, amlkt a roll-ptch-aw lltv Eulr-sögkkl történő forgatássoroatok rdménként kaptunk (a 69, 7, 7 gnltkből, a rdmént vö. a. gnlttl): TCP TCP cos 4 cos 5 cos 6 sn 4 sn sn 4 cos 5 cos 6 cos 4 sn sn 5 cos cos cos sn cos sn sn sn cos sn cos cos 5 sn cos sn 4 4 cos sn sn E cos 4 sn 5 E sn sn 4 5 E cos 5 D (9) Mvl,, lltv, s által 4 4 (9) smrt, TCP 4 a kövtkők srnt ksámítható (a 7. gnltből kndulva): 59
60 TCP TCP 4 TCP, (9) TCP TCP. (9) 4 Thát nncs más dolgunk, mnt TCP 4 gs lmt (9)-ból mghatáron, és a kapott mátrból a 6... példában ljártak srnt 4-t, 5-öt és 6-ot ksámítan. 8. Pálavérlés A kövtkőkbn arról ls só, hog a robot vérlőgség mképp vt végg a TCP-t a mgkívánt pálán. A sámítások kndulás adata a pála sarokpontjanak koordnátá lltv orntácós sög, a rdménk pdg a gs ültk sögpoícó-, sögsbsség- lltv söggorsulás-görbé a pála mntén. Ek alapján határohatók mg a robot mogatásáho sükségs pllanatn hajtónomatékok; a robotok hajtássabáloásának a fladata knk a mgfllő sntn tartása és a hajtásokat kövtlnül működttő áram-, fsültségsntk, vérlőmpulusok, stb. lőállítása. 8. PTP ránítás PTP (Pont-To-Pont) ránítás során csak a pála tartópontjat dfnáljuk, a kööttük bjárt pálagörbét nm. A vérlőgség sámára a gdül smpont a, hog a robot a lhtő lgrövdbb dő alatt jusson l a kdőhltből a végállapotba. E a lggsrűbbn úg oldható mg, ha a össs ültt a mamáls sbsséggl a új poícóba mogatjuk. Mvl a ültknk különböő nagságú lfordulásokat vag utakat kll mgtnnük, ltérő sbsséggl és gorsulással hsn a lső motornak a robot gését kll mogatna, a utolsónak csak a srsámot, íg mértésük során más-más smpontok érvénsülnk, a ültk nm 6
61 gsrr fjk b a munkájukat. A pálagörb a ültk gmás után lállásakor töréskt snvd, ért lőr nm trvhtő. A PTP vérlésnk fjlttbb váltoata a, amlnél a gorsabb ültk sbsségét úg állítják b, hog a lglassabb ülttl gütt végnk. Et a módsrt snkronált ült-ntrpolácónak (snchronous PTP ntrpolaton) nvük. A robot mogása íg mntsül a flslgs rgésktől. (49. ábra) 49. ábra PTP ránításnál a vérlőgség sámításgén nm túl nag, mvl nncs sükség a nvr gomtra fladat mgoldására. A gs ültk sbsség-görbéj a 5. ábra srnt alakul. A gorsító és fékő sakas mrdkség a hajtásra jllmő gorsulások függvén. 6
62 v (t) gorsítás v ma fékés. sakas t 5. ábra 8. Lnárs pálaránítás Lnárs pálaránítást alkalmava a TCP gns vonalban moog a kdőpontból a végpontba, és köbn a orntácója s gnltsn váltok. A sámítás módsr a ún. mgfogó-állapot vag Dscartstípusú ntrpolácó (angolul Cartsan ntrpolaton): A sakas mgtétléh sükségs dőt apró (Cartsan ccl-tm, cklusdő), ksámítjuk a TCP t dő alatt (,, ) lmodulását, t ntrvallumokra bontjuk a TCP pllanatn hltéből és a (,, ) nkrmnsből a nvr gomtra fladat mgoldásával mghatárouk a... T ült sögváltoásokat lltv lmodulásokat, a ültkt a sámolt poícóba mogatjuk (PTP ntrpolácóval), a fnt lépéskt addg foltatjuk, míg a célho nm érünk. A mgfogó-állapot ntrpolácóval bjárt sakas csak lvbn lht tljsn gns. A t ntrvallumonként ksámolt trajktóra-pontok köött a TCP ült ntrpolácóval halad, s döcögőssé ts a utat (a 5. ábra mndt kssé lnagolva mutatja). A pálabjárás mnőségén ks cklusdő válastásával sgíthtünk. A cklusdő csökkntését a vérlő sámítógép 6
63 kapactása korlátohatja, hsn mndn gs cklusban a nvr gomtra fladatot s mg kll oldana, s hatalmas sámítás gént támast. 5. ábra A 5. ábra g ült mgfogó-állapot ntrpolácóval sámított sögváltoását mutatja. Látható, hog a gs trajktóra-pontok köött más és más a görb mrdkség, vags a ült sögsbsség. A trajktóra-pontokon a sögsbsségk átmnt nélkül váltonak mg: a sbsség-görb kn a hlkn töréssl rndlkk, pdg végtln mértékű söggorsulást fltétl. A valóságban nm lhtségs, a hajtások által ladott nomaték és a l mogatott tömg mndn gs ültr mghatároák a lgnagobb gorsulást. 6
64 (t) v (t) t 5. ábra A llntmondás lküdésér két mgoldást alkalmahatunk. A gsrűbb a, hogha mndn gs trajktóra-ponton mgállítjuk a robotot, és a ültkt a új sbsségr gorsítjuk (5. ábra). E gadaságosság smpontból nm javasolt, mrt lassú ls a TCP mogása. Néhán olcsóbb, főként oktatórobot dolgok íg. (t) v (t) t 5. ábra A másk mgoldás a kövtkő (54. ábra): A mamáls ült gorsulások fglmbvétlévl a trajktórapontok körntébn mghatárouk aokat a átmnt dőkt, 64
65 amlk alatt a gs ültk mogása a gk sbsségről a máskra váltok, a ksámolt dők köül a lgnagobbat vssük (a lglassabb ültét), s a több ült gorsulását s rr a dőr sámítjuk k, a ültk sbsségét a trajktóra-pontok lőtt / dőpontban a sámolt gorsulásokkal váltotatn kdjük, hog dő múlva már a új sbsséggl moogjanak. (t) v (t) t 54. ábra A ábrán látható, hog a ült váltoók érték nm érk l a dáls stbn sámoltakat a trajktóra-pontokon: ltéréssl csak mgkölítk aokat. A robot g bonolult pálán fog a gns körül moogn, g bonos határon blül. A hajtások nomatéka, s íg a lgnagobb gorsulásak adottak, ért ha nagobbra válastjuk a robot mogás sbsségét, a átmnt dők mgnőnk, s által a hbák s nagobbak lsnk. A robot sbsség thát fordított aránban áll a pálabjárás pontosságával. A mogás bfjéskor nm ngdhtjük mg, hog pontatlan poícóban álljon mg a robot. E úg oldható mg, hog a lgutolsó trajktóra-pontot (a célállapotot) mgsmétljük. Ekkor a ültk sbsség a mgngdhtő lassulásokkal érusra csökkn, és a robot a kívánt 65
66 poícóban áll mg (55. ábra). Akkor s t a módsrt kövtjük, ha a robotot g bonos trajktóra-ponton hba nélkül akarjuk átvtn. A B B (t) v (t) t 55. ábra Bonolultabb formájú pálákon történő ránítás Előfordulhat, hog a robotnak g ívt, vag ívkt tartalmaó görbét (például autók karosséralmnk a vonalát) kll kövtn. A hh sükségs sámítások a lnárs pálaránításnál alkalmaottakho vthtők vssa, a lméltk léngs vonásokban nm különbönk. 8. Sbsségvérlés Bonos robottchnka fladatoknál a srsám sbsségét s állandó értékn kll tartanunk (pl. fstésénél). A TCP adott sbsséggl és ránban moog, és orntácója s gnltsn váltok. A ültk mgfllő mogása a ún. Jakob-mátr sgítségévl határoható mg: Ismrt a TCP poícója és orntácója g adott pllanatban: T, s által (94) 66
67 T... ült váltoók érték s, (95) továbbá a TCP,, tnglránú sbsség és a forgástnglk körül sögsbsség: d dt T v v v. (96) Krssük aokat a T d d d dt... dt dt ült sbsségkt, amlk t a mogást mgvalósítják. (97) d dt és d dt köött a (robot gomtrája alapján flírható) J () Jakobmátr trmt kapcsolatot: d dt d J ( ). (98) dt A krstt értékk a Jakob-mátr mghatároása után annak nvrtálásával kaphatók mg: d d J( ). (99) dt dt Lássunk rr g gsrű példát! A 56. ábrán g kétdmnós robotkar látható. Ismrjük a ült sögk pllanatn értékét: 45. () 45 A TCP vísnts lltv függőlgs ránú sbsség a kövtkő:, () thát a TCP vísnts ránban gségn sbsséggl halad. 67
68 Mkkora ült sögsbsségk btosítják t? d dt? () TCP B ż A 56. ábra. lépés: a Jakob mátr flírása: A ült váltoók és a TCP koordnátá köött össfüggésk: Acos Bcos( ), () Asn Bsn( ) (4) Drváljuk a dő srnt mndkét gnltt: Asn Bsn( )( ), (5) Acos Bcos( )( ), (6) thát Asn Bsn( ) Bsn( ), (7) Acos Bcos( ) Bcos( ). (8) A Jakob mátr kből flírható: 68
69 69 ) cos( ) cos( cos ) sn( ) sn( sn B B A B B A, (9) ) cos( ) cos( cos ) sn( ) sn( sn ) ( B B A B B A J. (). lépés: a Jakob-mátr ksámítása a adott, értékkkl, s a kapott mátr nvrtálása: cos9 cos9 cos 45 sn 9 sn 9 sn 45 () J, () ) ( J. () 4. lépés: a sögsbsségk mghatároása: ) ( J, () vags a. ült gségn sbsséggl forog vssaflé (am a ábrára tkntv s llnőrhtő). A össfüggésből kdrül, hog ) ( J a ült váltoók függvén, ért a robot különböő poícóban más és más ls a érték. Éppn ért, ha g sakason gnlts sbsséggl végg akarjuk vtn a TCP-t, akkor dőről dőr újra kll sámolnunk a sükségs sögsbsségkt. A módsr a lnárs ntrpolácóho hasonló: Mndnklőtt mghatárouk a Jakob-mátrot, a út mgtétléh sükségs dőt apró t dőntrvallumokra ostjuk (cklusdő),
70 a kdőpontban ksámítjuk a Jakob-mátr aktuáls értékét, nvrtáljuk, és mghatárouk a sükségs sögsbsségkt, a robotot a kllő sbsségr gorsítjuk, mköbn mghatárouk a robot poícóját t dő ltltévl, s rr s mghatárouk a sögsbsségkt a lőbb pont srnt, a ültk sbsségét a lnárs ntrpolácónál tárgaltakho hasonlóan a újonnan ksámított értékkr korrgáljuk, majd a sámításokat tovább t dők hoáadásával újra mg újra lvégük, és a robotot nnk mgfllőn mogatjuk, míg a célho nm értünk. 9. A robotok dnamka rndsr A ddgkbn mgtrvtük a robot mogását és mghatárotuk annak paramétrt: a pála gs pontjan fnnálló ült sbsségkt és gorsulásokat. Ekből a értékkből kll pllanatról pllanatra ksámolnunk a kívánt mogás fnntartását btosító nomatékokat. A lgutolsó lépés a kapott értékkt a hajtásokat kövtlnül működttő bavatkoó jllé alakítan: fsültséggé, árammá vag vérlőmpulussá. A ült sbsségk, a robotra ható külső és blső rők, valamnt a hajtások által ladott nomatékok köött vsont dnamka gnltk írják l, mlknk mgoldása a robot mogásgnltt rdmén. A gnltkbn srplő rőhatások a kövtkők: a robotra ható gravtácós rő, továbbá a srsám, mgfogó, lltv a fölmlt munkadarab súla, a ült hajtások által kfjttt rők, a somsédos ültk köött fnnálló rőhatások, a tömgk mogatásából sármaó rők: o thttlnség (gorsulással arános) rők, o cntrfugáls (a sbsség négtévl arános) rők 7
71 o a ültk mchanka csatolásából sármaó (a ültk sbsségnk soratával arános) rők. Valamnn dnamka hatás fglmbvétl rndkívül bonolult, gakorlat sámításokra alkalmatlan rdménkt adna, ért lhanagolásokat kll tnnünk: például a csllapító vag vstség lmk lhagásával, a karok rugalmasságának, csavarodásának mllőésévl. Mndn gs robotra mg kll srkstn a léngs lmkt magába foglaló dnamka modllt, aml sgítségévl mgkaphatjuk a robot térbl tömgloslását líró thttlnség tnort. E alapján írjuk fl, majd oldjuk mg a mogásgnltkt. A témakör mgsmréséh már rndlkésünkr áll sakrodalom: kmrítő résltsséggl tárgalja a []-al jlölt forrásmű, jgtünkbn csak mgsmétln tudnánk rdmént. 7
72 . Irodalomjgék, források [] Dr. Ar Gustáv, Dr. Lpóth András, Dr. Mrks István: Robotmanpulátorok, LSI, 988, Bp. [] Fsto Cosmr Educatonal robotvérlő program, Súgó [] Dr. Kulcsár Béla: Robottchnka, LSI, Bp. [4] Dr Sglr András: Robot ránítás modllk, LSI, 987, Bp. [5] Dr Sglr András: Eg 6 sabadságfokú antropomorf manpulátor knmatkája és sámítógéps vérlés, SZTAKI tanulmánok, 6/98 A ábrák nag rés a Fsto Cosmr Educatonal program látvánának flhasnálásával késült. 7
73 . Tartalomjgék. BEVEZETÉS. ALAPFOGALMAK. A ROBOTOK PROGRAMOZÁSÁNAK MÓDJAI 6. Onln programoás 6. Offln programoás 7 4. POZÍCIÓ ÉS ORIENTÁCIÓ MEGATÁROZÁSA 9 4. Poícó mghatároása hngrkoordnátákkal 9 4. Poícó mgadása gömbkoordnátákkal 4. Orntácó mgadása Eulr-sögkkl 4.4 Orntácó mgadása roll-ptch-aw (bllnés-bólntás-lfordulás) transformácókkal 5. OMOGÉN TRANSZFORMÁCIÓK 5 5. Példa homogén transformácók alkalmaására 6 5. Példa: slárd tst mogatása 8 6. RELATÍV TRANSZFORMÁCIÓK 6. Példa: rlatív transformácók sámítása 5 6. Példa: a transformácós mátr és a orntácós sögk vsona A roll-ptch-aw transformácó mátros alakban történő mgadása A roll-ptch-aw sögk ksámítása a rdő homogén transformácós mátrból 6. Vuáls nformácó fldolgoása 6.4 Pálapontok sámítása rlatív transformácókkal 7
74 7. A ROBOTKAR GEOMETRIÁJA A Dnavt-artnbrg transformácó A robot-gomtra drkt fladata A robot-gomtra nvr fladata PÁLYAVEZÉRLÉS 6 8. PTP ránítás 6 8. Lnárs pálaránítás 6 8. Sbsségvérlés A ROBOTOK DINAMIKAI RENDSZERE 7. IRODALOMJEGYZÉK, FORRÁSOK 7. TARTALOMJEGYZÉK 7 74
Bojtár-Gáspár: A végeselemmódszer matematikai alapjai
 Bojtár Imr Gáspár Zsolt A végslmmódszr matmatka alapja Elktronkusan ltölthtő lőadásvázlat építőmérnök hallgatók számára. http://www.pto.bm.hu/m/htdocs/oktatas/oktatas.php Kadó: BME Tartószrkztk Mchankája
Bojtár Imr Gáspár Zsolt A végslmmódszr matmatka alapja Elktronkusan ltölthtő lőadásvázlat építőmérnök hallgatók számára. http://www.pto.bm.hu/m/htdocs/oktatas/oktatas.php Kadó: BME Tartószrkztk Mchankája
Külső konzulens: Maza Gábor /E-ON Dél-dunántúli Áramhálózati Zrt./
 Péc Tudoángt Pollack Mhál Műzak é Inoratka Kar Műzak Inoratka é llao Intézt Tudoáno Dákkör Dolgozat Középzültégű zabadvztékk lktroo trénk záítáa a gakorlatban / Practcal calculaton o th lctrc ld trngth
Péc Tudoángt Pollack Mhál Műzak é Inoratka Kar Műzak Inoratka é llao Intézt Tudoáno Dákkör Dolgozat Középzültégű zabadvztékk lktroo trénk záítáa a gakorlatban / Practcal calculaton o th lctrc ld trngth
M3 ZÁRT CSATORNÁBAN ELHELYEZETT HENGERRE HATÓ ERŐ MÉRÉSE
 M3 ZÁRT CSATORNÁBAN ELHELYEZETT HENGERRE HATÓ ERŐ MÉRÉSE. A mérés élja A mérés fladat égyzt krsztmtsztű satorába bépíttt, az áramlás ráyára mrőlgs szmmtratglyű, külöböző átmérőjű hgrkr ható ( x, y ) rő
M3 ZÁRT CSATORNÁBAN ELHELYEZETT HENGERRE HATÓ ERŐ MÉRÉSE. A mérés élja A mérés fladat égyzt krsztmtsztű satorába bépíttt, az áramlás ráyára mrőlgs szmmtratglyű, külöböző átmérőjű hgrkr ható ( x, y ) rő
12. Laboratóriumi gyakorlat MÉRÉSEK FELDOLGOZÁSA
 . Laoratórum gakorlat MÉRÉSK FLDOLGOZÁSA. A gakorlat célja Lgks égztk LS) módszré alapuló polom-llsztés proléma mutatása és a módszr alkalmazása mérés rdmék fldolgozására, lltv érzéklő karaktrsztkák aaltkus
. Laoratórum gakorlat MÉRÉSK FLDOLGOZÁSA. A gakorlat célja Lgks égztk LS) módszré alapuló polom-llsztés proléma mutatása és a módszr alkalmazása mérés rdmék fldolgozására, lltv érzéklő karaktrsztkák aaltkus
FORGÓRÉSZ DINAMIKUS KIEGYENSÚLYOZÁSA I. Laboratóriumi gyakorlat elméleti útmutató
 ZÉCHENYI ITVÁN EGYETEM MŐZKI TUDOMÁNYI KR LKLMZOTT MECHNIK TNZÉK 1. tög-kgnsúlozatlanság FORGÓRÉZ DINMIKU KIEGYENÚLYOZÁ I. Laoratóru gakorlat lélt útutató gépk rzgésénk okozóa sok stn a rndzés forgórészénk
ZÉCHENYI ITVÁN EGYETEM MŐZKI TUDOMÁNYI KR LKLMZOTT MECHNIK TNZÉK 1. tög-kgnsúlozatlanság FORGÓRÉZ DINMIKU KIEGYENÚLYOZÁ I. Laoratóru gakorlat lélt útutató gépk rzgésénk okozóa sok stn a rndzés forgórészénk
Mágneses anyagok elektronmikroszkópos vizsgálata
 Mágnss anyagok lktronmikroszkópos vizsgálata 1. Transzmissziós lktronmikroszkóp 1.1. A mágnss kontraszt rdt a TEM-bn Az lktronmikroszkópban 100-200 kv-os (stlg 1 MV-os) gyorsítófszültséggl gyorsított lktronok
Mágnss anyagok lktronmikroszkópos vizsgálata 1. Transzmissziós lktronmikroszkóp 1.1. A mágnss kontraszt rdt a TEM-bn Az lktronmikroszkópban 100-200 kv-os (stlg 1 MV-os) gyorsítófszültséggl gyorsított lktronok
4. MECHANIKA STATIKA GYAKORLAT (kidolgozta: Triesz Péter, egy. ts.; Tarnai Gábor, mérnök tanár)
") SZÉCHENYI ISTVÁN EGYETE ALKALAZTT ECHANIKA TANSZÉK 4. ECHANIKA STATIKA GYAKRLAT (kdolgozta: Trsz Pétr, g. ts.; Tarna Gábor, mérnök tanár) Erő, nomaték, rőrndszr rdő, rőrndszrk gnértékűség 4.. Példa: z
SZÉCHENYI ISTVÁN EGYETE ALKALAZTT ECHANIKA TANSZÉK 4. ECHANIKA STATIKA GYAKRLAT (kdolgozta: Trsz Pétr, g. ts.; Tarna Gábor, mérnök tanár) Erő, nomaték, rőrndszr rdő, rőrndszrk gnértékűség 4.. Példa: z
5. ROBOTOK IRÁNYÍTÓ RENDSZERE. 5.1. Robotok belső adatfeldolgozásának struktúrája
 TARTALOM 5. ROBOTOK IRÁNYÍTÓ RENDSZERE... 7 5.. Robotok belső adatfeldolgozásának struktúrája... 7 5.. Koordináta transzformációk... 5... Forgatás... 5... R-P-Y szögek... 5... Homogén transzformációk...
TARTALOM 5. ROBOTOK IRÁNYÍTÓ RENDSZERE... 7 5.. Robotok belső adatfeldolgozásának struktúrája... 7 5.. Koordináta transzformációk... 5... Forgatás... 5... R-P-Y szögek... 5... Homogén transzformációk...
5. modul: Szilárdságtani Állapotok. 5.3. lecke: A feszültségi állapot
 5 modul: Silárdságtai Állapotok 53 lck: A fsültségi állapot A lck célja: A taaag flhasálója mgismrj a fsültségi állapot fogalmait valamit mg tudja határoi g lmi pot körték fsültségi állapotát Kövtlmék:
5 modul: Silárdságtai Állapotok 53 lck: A fsültségi állapot A lck célja: A taaag flhasálója mgismrj a fsültségi állapot fogalmait valamit mg tudja határoi g lmi pot körték fsültségi állapotát Kövtlmék:
Villamos érintésvédelem
 Villamos érintésvédlm A villamos nrgia ipari mértű flhasználása a század ljén kzdtt gyr nagyobb mértékbn ltrjdni és zzl gyidőbn jlntkztk az áramütésből rdő balstk is. Ennk kövtkztébn nagyarányú kutatás
Villamos érintésvédlm A villamos nrgia ipari mértű flhasználása a század ljén kzdtt gyr nagyobb mértékbn ltrjdni és zzl gyidőbn jlntkztk az áramütésből rdő balstk is. Ennk kövtkztébn nagyarányú kutatás
Modern piacelmélet. ELTE TáTK Közgazdaságtudományi Tanszék. Selei Adrienn
 Modrn piaclmélt ELTE TáTK Közgazdaságtudományi Tanszék Sli Adrinn A tananyag a Gazdasági Vrsnyhiatal Vrsnykultúra Központja és a Tudás-Ökonómia Alapítány támogatásáal készült az ELTE TáTK Közgazdaságtudományi
Modrn piaclmélt ELTE TáTK Közgazdaságtudományi Tanszék Sli Adrinn A tananyag a Gazdasági Vrsnyhiatal Vrsnykultúra Központja és a Tudás-Ökonómia Alapítány támogatásáal készült az ELTE TáTK Közgazdaságtudományi
8. MECHANIKA-SZILÁRDSÁGTAN GYAKORLAT (kidolgozta: dr. Nagy Zoltán egy. adjunktus; Bojtár Gergely egy. Ts.; Tarnai Gábor mérnöktanár.
 8 MECHANIKA-SZILÁRDSÁGTAN GYAKORLAT (kidolgota: dr Nag Zoltán g adjunktus; Bojtár Grgl g Ts; Tarnai Gábor mérnöktanár) 8 Fsültségi állapot smlélttés Adott: Ismrt g silárd tst pontjában a fsültségi állapot
8 MECHANIKA-SZILÁRDSÁGTAN GYAKORLAT (kidolgota: dr Nag Zoltán g adjunktus; Bojtár Grgl g Ts; Tarnai Gábor mérnöktanár) 8 Fsültségi állapot smlélttés Adott: Ismrt g silárd tst pontjában a fsültségi állapot
Országos Szilárd Leó fizikaverseny feladatai
 Országos Szilárd Ló fizikavrsny fladatai I katgória döntő, 5 április 9 Paks A fladatok mgoldásáoz 8 prc áll rndlkzésr Mindn sgédszköz asználató Mindn fladatot külön lapra írjon, s mindn lapon lgyn rajta
Országos Szilárd Ló fizikavrsny fladatai I katgória döntő, 5 április 9 Paks A fladatok mgoldásáoz 8 prc áll rndlkzésr Mindn sgédszköz asználató Mindn fladatot külön lapra írjon, s mindn lapon lgyn rajta
5. MECHANIKA STATIKA GYAKORLAT (kidolgozta: Triesz Péter, egy. ts.; Tarnai Gábor, mérnöktanár)
") SZÉCHENYI ISTVÁN EGYETE ALKALAZOTT ECHANIKA TANSZÉK. ECHANIKA STATIKA GYAKORLAT (kidolgozta: Trisz Pétr, g. ts.; Tarnai Gábor, mérnöktanár) Síkbli rőrndszr rdő vktorkttős, vonal mntén mgoszló rőrndszrk..
SZÉCHENYI ISTVÁN EGYETE ALKALAZOTT ECHANIKA TANSZÉK. ECHANIKA STATIKA GYAKORLAT (kidolgozta: Trisz Pétr, g. ts.; Tarnai Gábor, mérnöktanár) Síkbli rőrndszr rdő vktorkttős, vonal mntén mgoszló rőrndszrk..
MINŐSÉGIRÁNYÍTÁSI KÉZIKÖNYV
 Lap: 1/145 AZ INCZÉDY GYÖRGY KÖZÉPISKOLA, SZAKISKOLA ÉS KOLLÉGIUM MINŐSÉGIRÁNYÍTÁSI E AZ MSZ EN ISO 9001 SZABVÁNY ALAPJÁN, ILLETVE MINŐSÉGIRÁNYÍTÁSI PROGRAMJA A KÖZOK-TATÁSI TÖR- VÉNY (1993. ÉVI LXXIX.)
Lap: 1/145 AZ INCZÉDY GYÖRGY KÖZÉPISKOLA, SZAKISKOLA ÉS KOLLÉGIUM MINŐSÉGIRÁNYÍTÁSI E AZ MSZ EN ISO 9001 SZABVÁNY ALAPJÁN, ILLETVE MINŐSÉGIRÁNYÍTÁSI PROGRAMJA A KÖZOK-TATÁSI TÖR- VÉNY (1993. ÉVI LXXIX.)
Szilárdságtan. Miskolci Egyetem GÉPÉSZMÉRNÖKI ÉS INFORMATIKAI KAR
 Miskolci Egetem GÉÉMÉRNÖKI É INORMTIKI KR ilárságtan (Oktatási segélet a Gépésmérnöki és Informatikai Kar sc leveleős hallgatói résére) Késítette: Nánori riges, irbik ánor Miskolc, 2008. Een kéirat a Gépésmérnöki
Miskolci Egetem GÉÉMÉRNÖKI É INORMTIKI KR ilárságtan (Oktatási segélet a Gépésmérnöki és Informatikai Kar sc leveleős hallgatói résére) Késítette: Nánori riges, irbik ánor Miskolc, 2008. Een kéirat a Gépésmérnöki
3. MÉRETEZÉS, ELLENŐRZÉS STATIKUS TERHELÉS ESETÉN
 ÉRETEZÉS ELLENŐRZÉS STATIUS TERHELÉS ESETÉN A méreteés ellenőrés célkitűése: Annak elérése hog a serkeet rendeltetésserű hasnálat esetén előírt ideig és előírt bitonsággal elviselje a adott terhelést anélkül
ÉRETEZÉS ELLENŐRZÉS STATIUS TERHELÉS ESETÉN A méreteés ellenőrés célkitűése: Annak elérése hog a serkeet rendeltetésserű hasnálat esetén előírt ideig és előírt bitonsággal elviselje a adott terhelést anélkül
2011. évi intézmény-felújítás,intézményi javaslatok
 agasépítési csoport PRIORITÁSOK: BRH=biztonságos és rndlttésszrű használat, =állagmgóvás, = műszak iés funkcionális szükség, =gyéb 13 Holdfény Utcai Óvoda Kincskrső Tagóvodája Prioritás gjgyzés 13.1 Krt
agasépítési csoport PRIORITÁSOK: BRH=biztonságos és rndlttésszrű használat, =állagmgóvás, = műszak iés funkcionális szükség, =gyéb 13 Holdfény Utcai Óvoda Kincskrső Tagóvodája Prioritás gjgyzés 13.1 Krt
Merev test mozgása. A merev test kinematikájának alapjai
 TÓTH : Merev test (kbővített óraválat) Merev test mogása Eddg olyan dealált "testek" mogását vsgáltuk, amelyek a tömegpont modelljén alapultak E aal a előnnyel járt, hogy nem kellett foglalkon a test kterjedésével
TÓTH : Merev test (kbővített óraválat) Merev test mogása Eddg olyan dealált "testek" mogását vsgáltuk, amelyek a tömegpont modelljén alapultak E aal a előnnyel járt, hogy nem kellett foglalkon a test kterjedésével
KOD: B377137. 0, egyébként
 KOD: 777. Egy csomagológép kilogrammos zacskókat tölt. A zacskóba töltött cukor mnnyiség normális loszlású valószínûségi változó kg várható értékkl és.8 kg szórással. A zacskó súlyra nézv lsõ osztályú,
KOD: 777. Egy csomagológép kilogrammos zacskókat tölt. A zacskóba töltött cukor mnnyiség normális loszlású valószínûségi változó kg várható értékkl és.8 kg szórással. A zacskó súlyra nézv lsõ osztályú,
Elektromágneses hullámok
 KÁLMÁN P.-TÓT.: ullámok/4 5 5..5. (kibőíe óraála) lekromágneses hullámok elekromágneses elenségek árgalásánál láuk, hog áloó mágneses erőér elekromos erőere (elekromágneses inukció), áloó elekromos erőér
KÁLMÁN P.-TÓT.: ullámok/4 5 5..5. (kibőíe óraála) lekromágneses hullámok elekromágneses elenségek árgalásánál láuk, hog áloó mágneses erőér elekromos erőere (elekromágneses inukció), áloó elekromos erőér
1. AZ MI FOGALMA. I. Bevezetés ELIZA. Első szakasz (60-as évek) Második szakasz (70-es évek) Harmadik szakasz (80-as évek)
 Második szakasz (70-es évek) Harmadik szakasz (80-as évek)") 1. AZ MI FOGALMA I. Bvztés 1956 nyár. Darthmouth Collg-i konfrncia Kzdti cél: Az mbri gondolkodás számítógép sgítségévl történő rprodukálása. Grgorics Tibor Bvztés a mstrségs intllignciába 1 Grgorics Tibor
1. AZ MI FOGALMA I. Bvztés 1956 nyár. Darthmouth Collg-i konfrncia Kzdti cél: Az mbri gondolkodás számítógép sgítségévl történő rprodukálása. Grgorics Tibor Bvztés a mstrségs intllignciába 1 Grgorics Tibor
(2) A d(x) = 2x + 2 függvénynek van véges határértéke az x0 = 1 helyen, így a differenciálhányados: lim2x
 A d(x) = 2x + 2 függvénynek van véges határértéke az x0 = 1 helyen, így a differenciálhányados: lim2x") DIFFERENCIÁLSZÁMÍTÁS MINTAPÉLDÁK.. Példa. Határozzuk mg az f = függvénnk az = hlhz tartozó diffrnciahánados függvénét, majd vizsgáljuk mg, hog f diffrnciálható- az -ban adjuk mg az = hlhz tartozó diffrnciálhánadost.
DIFFERENCIÁLSZÁMÍTÁS MINTAPÉLDÁK.. Példa. Határozzuk mg az f = függvénnk az = hlhz tartozó diffrnciahánados függvénét, majd vizsgáljuk mg, hog f diffrnciálható- az -ban adjuk mg az = hlhz tartozó diffrnciálhánadost.
Feladatok megoldással
 Fladatok mgoldással. sztmbr 6.. Halmazrdszrk. Igazoljuk! A \ B A r (A r B) (A [ B) r ((A r B) [ (B r A)) Mgoldás. A r (A r B) A \ A \ B A \ A [ B A \ A [ (A \ B) A \ B (A [ B) r ((A r B) [ (B r A)) (A
Fladatok mgoldással. sztmbr 6.. Halmazrdszrk. Igazoljuk! A \ B A r (A r B) (A [ B) r ((A r B) [ (B r A)) Mgoldás. A r (A r B) A \ A \ B A \ A [ B A \ A [ (A \ B) A \ B (A [ B) r ((A r B) [ (B r A)) (A
Teherhordó üveg födémszerkezet: T gerenda ragasztott öv-gerinc kapcsolatának numerikus vizsgálata
 Tudományos Diákköri Konrncia Thrhordó üvg ödémszrkzt: T grnda ragasztott öv-grinc kapcsolatának numrikus vizsgálata Készíttt: Gál Tamás F17JCS építőmérnök hallgató Konzulns: Dr. Vigh László Grgly Egytmi
Tudományos Diákköri Konrncia Thrhordó üvg ödémszrkzt: T grnda ragasztott öv-grinc kapcsolatának numrikus vizsgálata Készíttt: Gál Tamás F17JCS építőmérnök hallgató Konzulns: Dr. Vigh László Grgly Egytmi
A szeretet tanúi. 2013. március 31. 18. évfolyam, 1. szám. Az algy i egyházközség kiadványa KRISZTUS FELTÁMADT! ÚJ PÁPÁNK
 2013. március 31. 18. évfolyam, 1. szám A szrtt tanúi Az algy i gyházközség kiadványa KRISZTUS FELTÁMADT! A Húsvét a Fltámadás - és nm a nyuszi - ünnp Ádám és Éva az s-b nnl vszíttt l az örök éltt. Az
2013. március 31. 18. évfolyam, 1. szám A szrtt tanúi Az algy i gyházközség kiadványa KRISZTUS FELTÁMADT! A Húsvét a Fltámadás - és nm a nyuszi - ünnp Ádám és Éva az s-b nnl vszíttt l az örök éltt. Az
A szilárdságtani rúdelmélethez
 A slárságtan rúlmélth Már mgnt találtn a ntrntn g anagot [ ], ml lnított valamt. Most rről ls só. A történt, hog [ ] - b blolvasva fltűnt a [ 2 ] Sgr Fal - fél, valamnt a [ 3 ] Lana ~ Lfsc - fél tárgalásmóho
A slárságtan rúlmélth Már mgnt találtn a ntrntn g anagot [ ], ml lnított valamt. Most rről ls só. A történt, hog [ ] - b blolvasva fltűnt a [ 2 ] Sgr Fal - fél, valamnt a [ 3 ] Lana ~ Lfsc - fél tárgalásmóho
108. szám A MAGYAR KÖZTÁRSASÁG HIVATALOS LAPJA. Budapest, 2009. jú li us 30., csütörtök TARTALOMJEGYZÉK. Ára: 1125 Ft. Oldal
 A MAGYAR KÖZTÁRSASÁG HIVATALOS LAPJA Budapst, 2009. jú l us 30., csütörtök 108. szám Ára: 1125 Ft TARTALOMJEGYZÉK 158/2009. (VII. 30.) Korm. rn d lt A mzõgazdaság trmékk és az éllmszrk, valamnt a szszs
A MAGYAR KÖZTÁRSASÁG HIVATALOS LAPJA Budapst, 2009. jú l us 30., csütörtök 108. szám Ára: 1125 Ft TARTALOMJEGYZÉK 158/2009. (VII. 30.) Korm. rn d lt A mzõgazdaság trmékk és az éllmszrk, valamnt a szszs
A művészeti galéria probléma
 A műészti galéria probléma A műészti galéria probléma (art galry problm): A műészti galéria mgfigylés kamrákkal / őrökkl. Hálózattrzés Alapjai 2007 8: Műészti Galéria Probléma Őrzési / Mgilágítási problémák
A műészti galéria probléma A műészti galéria probléma (art galry problm): A műészti galéria mgfigylés kamrákkal / őrökkl. Hálózattrzés Alapjai 2007 8: Műészti Galéria Probléma Őrzési / Mgilágítási problémák
A projekt keretében elkészült tananyagok:
 VÉGESEEM-MÓDSZER A pojt tébn lésült tananago: Anagtchnológá Matals tchnolog Anagtdomán Áamlástchna gép CAD tanönv CAD Boo CAD/CAM/CAE ltons példatá CAM tanönv Mééstchna Ménö optmalácó Engnng Optmaton Végslm-analís
VÉGESEEM-MÓDSZER A pojt tébn lésült tananago: Anagtchnológá Matals tchnolog Anagtdomán Áamlástchna gép CAD tanönv CAD Boo CAD/CAM/CAE ltons példatá CAM tanönv Mééstchna Ménö optmalácó Engnng Optmaton Végslm-analís
Orosz Gyula: Markov-láncok. További feladatok
 Oroz Gyula: Markov-lánok További flaatok.6. flaat: Két játéko y zabályo érmét többzör flob ymá után. Az A játéko akkor yőz ha a fjk záma hárommal több lz mint az íráok záma; mí B akkor yőz ha az íráok
Oroz Gyula: Markov-lánok További flaatok.6. flaat: Két játéko y zabályo érmét többzör flob ymá után. Az A játéko akkor yőz ha a fjk záma hárommal több lz mint az íráok záma; mí B akkor yőz ha az íráok
 A Tartószerkezeti Tagozat Minősítő Bizottságának ügrendje ᔇ劇SÍTᔇ劇 B ZOTTSÁG ( B) JOGKÖRE ó, pí, ő p ó ó, p í í í í í p, ő í pí í, pí, ő pí, ó í, ő í ő vezető teᔇ劇vezőᔇ劇 ᔇ劇ᔇ劇 ᔇ劇zᔇ劇ᔇ劇ᔇ劇ᔇ劇tőᔇ劇ᔇ劇 vezető ᔇ劇zᔇ劇ᔇ劇ᔇ劇ᔇ劇tőᔇ劇
A Tartószerkezeti Tagozat Minősítő Bizottságának ügrendje ᔇ劇SÍTᔇ劇 B ZOTTSÁG ( B) JOGKÖRE ó, pí, ő p ó ó, p í í í í í p, ő í pí í, pí, ő pí, ó í, ő í ő vezető teᔇ劇vezőᔇ劇 ᔇ劇ᔇ劇 ᔇ劇zᔇ劇ᔇ劇ᔇ劇ᔇ劇tőᔇ劇ᔇ劇 vezető ᔇ劇zᔇ劇ᔇ劇ᔇ劇ᔇ劇tőᔇ劇
MECHANIKA-SZILÁRDSÁGTAN 12. hét gyakorlati anyaga (kidolgozta : dr. Nagy Zoltán egy.adjunktus, Bojtár Gergely egy.tanársegéd)
") ZÉHENY TVÁN EGYETE LKLZOTT EHNK TNZÉK EHNK-ZLÁRÁGTN 1. hét gakorlati anaga (kidolgota : dr. Nag Zoltán eg.adjunktus, ojtár Gergel eg.tanársegéd) 1.1 feladat : Primatikus rudak össetett igénbevételei (
ZÉHENY TVÁN EGYETE LKLZOTT EHNK TNZÉK EHNK-ZLÁRÁGTN 1. hét gakorlati anaga (kidolgota : dr. Nag Zoltán eg.adjunktus, ojtár Gergel eg.tanársegéd) 1.1 feladat : Primatikus rudak össetett igénbevételei (
4 205 044-2012/11 Változtatások joga fenntartva. Kezelési útmutató. UltraGas kondenzációs gázkazán. Az energia megőrzése környezetünk védelme
 HU 4 205 044-2012/11 Változtatások joga fenntartva Kezelés útmutató UltraGas kondenzácós gázkazán Az energa megőrzése környezetünk védelme Tartalomjegyzék UltraGas 15-1000 4 205 044 1. Kezelés útmutató
HU 4 205 044-2012/11 Változtatások joga fenntartva Kezelés útmutató UltraGas kondenzácós gázkazán Az energa megőrzése környezetünk védelme Tartalomjegyzék UltraGas 15-1000 4 205 044 1. Kezelés útmutató
A hőmérsékleti sugárzás
 A hőmérséklt sugárzás (Dr. Parpás Béla lőadása alapján ljgyzték a Mskolc gytm harmadévs nformatkus hallgató) Alapjlnségk Mndnnap tapasztalat, hogy a mlgíttt tstk hősugárzást (nfravörös sugárzást) bocsátanak
A hőmérséklt sugárzás (Dr. Parpás Béla lőadása alapján ljgyzték a Mskolc gytm harmadévs nformatkus hallgató) Alapjlnségk Mndnnap tapasztalat, hogy a mlgíttt tstk hősugárzást (nfravörös sugárzást) bocsátanak
MEREVSZÁRNYÚ REPÜLŐGÉPEK VEZÉRSÍK-RENDSZEREINEK KIALAKÍTÁSA 3 REPÜLŐKÉPESSÉG
 Dr. Óvári Gula 1 - Dr. Urbán István 2 MEREVSZÁRNYÚ REPÜLŐGÉPEK VEZÉRSÍK-RENDSZEREINEK KILKÍTÁS 3 cikk(soroatban)ben a merev sárnú repülőgépek veérsík rendserinek terveését és építését követheti nomon lépésről
Dr. Óvári Gula 1 - Dr. Urbán István 2 MEREVSZÁRNYÚ REPÜLŐGÉPEK VEZÉRSÍK-RENDSZEREINEK KILKÍTÁS 3 cikk(soroatban)ben a merev sárnú repülőgépek veérsík rendserinek terveését és építését követheti nomon lépésről
Országos Szakiskolai Közismereti Tanulmányi Verseny 2005/2006 MAGYAR NYELV ÉS HELYESÍRÁS
 Orszáos Szkiskoli Közismrti Tnulmányi Vrsny 2005/2006 MAGYAR NYELV ÉS HELYESÍRÁS II. (rionális) oruló 2006. ruár 17... Hlyszín jélyzőj Vrsnyző Pontszám Kój Elértő Elért Százlék. 120.. % Jvító tnár Zsűri
Orszáos Szkiskoli Közismrti Tnulmányi Vrsny 2005/2006 MAGYAR NYELV ÉS HELYESÍRÁS II. (rionális) oruló 2006. ruár 17... Hlyszín jélyzőj Vrsnyző Pontszám Kój Elértő Elért Százlék. 120.. % Jvító tnár Zsűri
12. Kétváltozós függvények
 . Kétváltoós üggvénk Értlmés: a = képlt g kétváltoós üggvént ad mg ha a sík bárml pontjáho és üggtln váltoók a üggő váltoó lgljbb g érték tartoik. Ha g sm akkor a üggvén nm értlmtt abban a pontban ha g
. Kétváltoós üggvénk Értlmés: a = képlt g kétváltoós üggvént ad mg ha a sík bárml pontjáho és üggtln váltoók a üggő váltoó lgljbb g érték tartoik. Ha g sm akkor a üggvén nm értlmtt abban a pontban ha g
Méret: Végződés: Min. hőmérséklet: Max. hőmérséklet: Max. nyomás: Specifikációk:
 L SZ 17 SÓS O L Z Ó ÉSTOL t: őd: in. hőmklt: x. hőmklt: x. nomá: Spcifikációk: Anok: -től -i ISO P kimák kö - C 0 C b -i m mlkdő oó ki kk tiánú ámlá tömít nh nomávt Öntöttv há n.hu v l n.hu v l Z ÉSTOLÓ
L SZ 17 SÓS O L Z Ó ÉSTOL t: őd: in. hőmklt: x. hőmklt: x. nomá: Spcifikációk: Anok: -től -i ISO P kimák kö - C 0 C b -i m mlkdő oó ki kk tiánú ámlá tömít nh nomávt Öntöttv há n.hu v l n.hu v l Z ÉSTOLÓ
18. előadás ÁLLANDÓ KÖLTSÉGEK ÉS A KÖLTSÉGGÖRBÉK
 18. előadás ÁLLANDÓ KÖLTSÉGEK ÉS A KÖLTSÉGGÖRBÉK Kertesi Gábor Világi Balázs Varian 21. fejezete átdolgozva 18.1 Bevezető A vállalati technológiák sajátosságainak vizsgálatát eg igen fontos elemzési eszköz,
18. előadás ÁLLANDÓ KÖLTSÉGEK ÉS A KÖLTSÉGGÖRBÉK Kertesi Gábor Világi Balázs Varian 21. fejezete átdolgozva 18.1 Bevezető A vállalati technológiák sajátosságainak vizsgálatát eg igen fontos elemzési eszköz,
3. Lokális approximáció elve, végeselem diszkretizáció egydimenziós feladatra
 SZÉCHENYI ISTVÁN EGYETEM AAMAZOTT MECHANIA TANSZÉ 5. MECHANIA-VÉGESEEM MÓDSZER EŐADÁS (kidolgozta: Szül Vronika g. ts.) V. lőadás. okális aroimáció lv végslm diszkrtizáció gdimnziós fladatra Amint azt
SZÉCHENYI ISTVÁN EGYETEM AAMAZOTT MECHANIA TANSZÉ 5. MECHANIA-VÉGESEEM MÓDSZER EŐADÁS (kidolgozta: Szül Vronika g. ts.) V. lőadás. okális aroimáció lv végslm diszkrtizáció gdimnziós fladatra Amint azt
Helyszükséglet összehasonlítás
 Hlyszükséglt összhsonlítás Hgyományos riálvntilátor A VAR rnszr összhsonlítás Hlios RADAX VAR Systm A VAR rnszr z lsony nyomás növkésű xiálvntilátorok és riál vntilátorok közötti szükségltkt légíti ki.
Hlyszükséglt összhsonlítás Hgyományos riálvntilátor A VAR rnszr összhsonlítás Hlios RADAX VAR Systm A VAR rnszr z lsony nyomás növkésű xiálvntilátorok és riál vntilátorok közötti szükségltkt légíti ki.
Méret: Végződés: Min. hőmérséklet: Max. hőmérséklet: Max. nyomás: Specifikációk:
 L ZR 552 CAP Ó Y L O G T B - B N t: őd: in. hőmklt: x. hőmklt: x. nomá: pcifikációk: Anok: DN 1/ -től -i BP blő mnt - 10 C 120 C 25 b (DN 1"-i) Záhtó k PTF tömítl Tlj fut á n.hu v l n.hu v l AP 552 GOLYÓC
L ZR 552 CAP Ó Y L O G T B - B N t: őd: in. hőmklt: x. hőmklt: x. nomá: pcifikációk: Anok: DN 1/ -től -i BP blő mnt - 10 C 120 C 25 b (DN 1"-i) Záhtó k PTF tömítl Tlj fut á n.hu v l n.hu v l AP 552 GOLYÓC
Fizika 1i gyakorlat példáinak kidolgozása 2012. tavaszi félév
 Fizika 1i gyakorlat példáinak kidolgozása 2012. tavaszi félév Köszönetnyilvánítás: Az órai példák kidolgozásáért, és az otthoni példákkal kapcsolatos kérdések készséges megválaszolásáért köszönet illeti
Fizika 1i gyakorlat példáinak kidolgozása 2012. tavaszi félév Köszönetnyilvánítás: Az órai példák kidolgozásáért, és az otthoni példákkal kapcsolatos kérdések készséges megválaszolásáért köszönet illeti
1.1 Lemezanyagok tulajdonságai és alakíthatóságuk
 1 Lemezanyagok tulajdonságai és alakíthatóságuk 1.1 Lemezanyagok tulajdonságai és alakíthatóságuk A lemezalkatrész-gyártás anyagait részben a szakítóvizsgálatból részben szabványos technológiai próbákból
1 Lemezanyagok tulajdonságai és alakíthatóságuk 1.1 Lemezanyagok tulajdonságai és alakíthatóságuk A lemezalkatrész-gyártás anyagait részben a szakítóvizsgálatból részben szabványos technológiai próbákból
FIZIKA BSc, III. évfolyam / 1. félév Optika előadásjegyzet POLARIZÁCIÓ. Dr. Barócsi Attila, Dr. Erdei Gábor,
 FIZIK BSc III. évfolm /. félév Opk lődásjg POLRIZÁCIÓ D. Bócs l D. d Gáo 7-9-8 jánlo skodlom: Kln-Fuk: Rch P.: Slh-Tch: Polácó: Opcs Bvés modn opká Fundmnls of Phooncs Oln M hullámo nvünk polálnk mln éősségvko
FIZIK BSc III. évfolm /. félév Opk lődásjg POLRIZÁCIÓ D. Bócs l D. d Gáo 7-9-8 jánlo skodlom: Kln-Fuk: Rch P.: Slh-Tch: Polácó: Opcs Bvés modn opká Fundmnls of Phooncs Oln M hullámo nvünk polálnk mln éősségvko
7. Térbeli feladatok megoldása izoparametrikus elemekkel
 7 ébl fladatok mgoldása zoaamtkus lmkkl ébl fladat: A tst (alkatész) alakjáa (gomtájáa) és thlésé nézv nncs smmln kolátozó fltétlzés 7 Összfoglaló smétlés Elmozdulásmző: u ux v wz Elmozdulás koodnáták:
7 ébl fladatok mgoldása zoaamtkus lmkkl ébl fladat: A tst (alkatész) alakjáa (gomtájáa) és thlésé nézv nncs smmln kolátozó fltétlzés 7 Összfoglaló smétlés Elmozdulásmző: u ux v wz Elmozdulás koodnáták:
Méret: Végződés: Min. hőmérséklet: Max. hőmérséklet: Max. nyomás: Specifikációk:
 LNY EE 5 ELEP P KÚ t: őd: in. hőmklt: x. hőmklt: x. nomá: pcifikációk: Anok: DN 1/2 -től 2 -i BP blő mnt - 10 C 110 C 1 B ikomillimt báloá ltő conkok á há n.hu v l n.hu v l 5 ELEP KÚP PECIFIKÁCIÓK: Tt
LNY EE 5 ELEP P KÚ t: őd: in. hőmklt: x. hőmklt: x. nomá: pcifikációk: Anok: DN 1/2 -től 2 -i BP blő mnt - 10 C 110 C 1 B ikomillimt báloá ltő conkok á há n.hu v l n.hu v l 5 ELEP KÚP PECIFIKÁCIÓK: Tt
Méret: Végződés: Min. hőmérséklet: Max. hőmérséklet: Max. nyomás: Specifikációk:
 L E 15 PN1 PEN K É F S KAI IS 9001 : 08 PED 97/2/CE t: őd: in. hőmklt: x. hőmklt: x. nomá: Spcifikációk: Anok: DN 25-től 250-i PN 1 Kimák - C 00 C 1 B nliánú moá odmnt blő cővl odmnt cl hullám tt Acl kimák
L E 15 PN1 PEN K É F S KAI IS 9001 : 08 PED 97/2/CE t: őd: in. hőmklt: x. hőmklt: x. nomá: Spcifikációk: Anok: DN 25-től 250-i PN 1 Kimák - C 00 C 1 B nliánú moá odmnt blő cővl odmnt cl hullám tt Acl kimák
VT 265 www.whirlpool.com
 VT 265.hirlpool.com 1 BEÜZEMELÉS A HÁLÓZATRA CSATLAKOZTATÁS ELŐTT ELLENŐRIZZE, HOGY A TÖRZSLAPON jlztt fszültség mggyzik- a lakás fszültségévl. NE TÁVOLÍTSA EL A MIKROLLÁM-BEVEZETÉST VÉDŐ LE- MEZEKET,
VT 265.hirlpool.com 1 BEÜZEMELÉS A HÁLÓZATRA CSATLAKOZTATÁS ELŐTT ELLENŐRIZZE, HOGY A TÖRZSLAPON jlztt fszültség mggyzik- a lakás fszültségévl. NE TÁVOLÍTSA EL A MIKROLLÁM-BEVEZETÉST VÉDŐ LE- MEZEKET,
Tartószerkezet-rekonstrukciós Szakmérnöki Képzés
 .5.. _. tés Végslm-mósr Végslm-mósr. A gomtra tartomán (srkt) flostása (égs)lmkr.. okáls koornáta-rnsr flétl kacsolat a lokáls és globáls koornátarnsrk köött.. A bás függénk flétl fnálása lmnként.. A mrség
.5.. _. tés Végslm-mósr Végslm-mósr. A gomtra tartomán (srkt) flostása (égs)lmkr.. okáls koornáta-rnsr flétl kacsolat a lokáls és globáls koornátarnsrk köött.. A bás függénk flétl fnálása lmnként.. A mrség
A szelepre ható érintkezési erő meghatározása
 A szlpr ható érintkzési rő mghatározása Az [ 1 ] műbn az alábbi fladatot találtuk. A fladat: Adott az ábra szrinti szlpmlő szrkzt. Az a xcntricitással szrlt R sugarú bütyök / körtárcsa ω 1 állandó szögsbsséggl
A szlpr ható érintkzési rő mghatározása Az [ 1 ] műbn az alábbi fladatot találtuk. A fladat: Adott az ábra szrinti szlpmlő szrkzt. Az a xcntricitással szrlt R sugarú bütyök / körtárcsa ω 1 állandó szögsbsséggl
Néhány pontban a függvény értéke: x -4-2 -1-0.5 0.5 1 2 4 f (x) -0.2343-0.375 0 6-6 0 0.375 0.2343
 -0.2343-0.375 0 6-6 0 0.375 0.2343") Házi ladatok mgoldása 0. nov.. HF. Elmzz az ( ) = üggvényt (értlmzési tartomány, olytonosság, határérték az értlmzési tartomány véginél és a szakadási pontokban, zérushly, y-tnglymtszt, monotonitás, lokális
Házi ladatok mgoldása 0. nov.. HF. Elmzz az ( ) = üggvényt (értlmzési tartomány, olytonosság, határérték az értlmzési tartomány véginél és a szakadási pontokban, zérushly, y-tnglymtszt, monotonitás, lokális
 ᔗ叧 Jegyzőkönyv Készült Apaj Község Képviselő-testületének 2007. január 18-án megtartott üléséről 1/ 007 (01 18 ) / 007 (01 18 ) / 007 (01 18 ) / 007 (01 18 ) / 007 (01 18 ) 6/ 007 (01 18 ) 7/ 007 (01 18
ᔗ叧 Jegyzőkönyv Készült Apaj Község Képviselő-testületének 2007. január 18-án megtartott üléséről 1/ 007 (01 18 ) / 007 (01 18 ) / 007 (01 18 ) / 007 (01 18 ) / 007 (01 18 ) 6/ 007 (01 18 ) 7/ 007 (01 18
Egyenlőtlen cellafelbontáson alapuló többszintű numerikus modellezési eljárások
 Egnlőtln llaflbontáson alapló többszintű nris odllzési láráso Írta: Gáspár Csaba ai az Inforatiai Tdoánágban az MTA dotori í lnrésér pálázi Gőr 7 TARTAOMJEGYZÉK. Egnlőtln flbontású llarndszr QT-háló...
Egnlőtln llaflbontáson alapló többszintű nris odllzési láráso Írta: Gáspár Csaba ai az Inforatiai Tdoánágban az MTA dotori í lnrésér pálázi Gőr 7 TARTAOMJEGYZÉK. Egnlőtln flbontású llarndszr QT-háló...
5. MECHANIKA STATIKA GYAKORLAT (kidolgozta: Triesz Péter, egy. ts.; Tarnai Gábor, mérnöktanár)
") SZÉCHENYI ISTVÁN EGYETE ALKALAZOTT ECHANIKA TANSZÉK. ECHANIKA STATIKA GYAKORLAT (idolgozt: Trisz Pétr, g. ts.; Trni Gábor, mérnötnár) Erőrndszr rdő vtorttős, vonl mntén mgoszló rőrndszr.. Péld Adott: z
SZÉCHENYI ISTVÁN EGYETE ALKALAZOTT ECHANIKA TANSZÉK. ECHANIKA STATIKA GYAKORLAT (idolgozt: Trisz Pétr, g. ts.; Trni Gábor, mérnötnár) Erőrndszr rdő vtorttős, vonl mntén mgoszló rőrndszr.. Péld Adott: z
674/697. Méret: Végződés: Min. hőmérséklet: Max. hőmérséklet: Max. nyomás: Specifikációk:
 L ZR 7/97 AP C Ó Y L O G NT t: őd: in. hőmklt: x. hőmklt: x. nomá: pcifikációk: Anok: DN 1/ -től 1/2 -i Külő Blő BP - C 90 C 1 b Záhtó k O-űű lpáon Fkt lumínium k á há n.hu v l. n.hu v l. P LYÓCA O G NT
L ZR 7/97 AP C Ó Y L O G NT t: őd: in. hőmklt: x. hőmklt: x. nomá: pcifikációk: Anok: DN 1/ -től 1/2 -i Külő Blő BP - C 90 C 1 b Záhtó k O-űű lpáon Fkt lumínium k á há n.hu v l. n.hu v l. P LYÓCA O G NT
DR. JUHÁSZ MÁRTA BME Ergonómia és Pszichológia Tanszék 1111 Budapest, Egry J. u. 1. Email: juhaszm@erg.bme.hu Tel: 1/463 40 22 www.erg.bme.
 DR. JUHÁSZ MÁRTA BME Ergonómia és Pszichológia Tanszék 1111 Budapst, Egry J. u. 1. Email: juhaszm@rg.bm.hu Tl: 1/463 40 22 www.rg.bm.hu A KIVÁLASZTÁS ÉS A MUNKAKÖRI ALKALMASSÁG PSZICHOLÓGIÁJA II. Az lızı
DR. JUHÁSZ MÁRTA BME Ergonómia és Pszichológia Tanszék 1111 Budapst, Egry J. u. 1. Email: juhaszm@rg.bm.hu Tl: 1/463 40 22 www.rg.bm.hu A KIVÁLASZTÁS ÉS A MUNKAKÖRI ALKALMASSÁG PSZICHOLÓGIÁJA II. Az lızı

53. sz. mérés. Hurokszabályozás vizsgálata
 53. sz. mérés Hurokszaályozás vizsgálata nagyszültségű alap- illtv losztóhálózat (4,, kv a hálózatok unkcióáól kövtkzőn hurkolt (töszörösn hurkolt kialakítású. sok csomóponttal, tö táplálási illtv ogyasztási
53. sz. mérés Hurokszaályozás vizsgálata nagyszültségű alap- illtv losztóhálózat (4,, kv a hálózatok unkcióáól kövtkzőn hurkolt (töszörösn hurkolt kialakítású. sok csomóponttal, tö táplálási illtv ogyasztási
EGY KERESZTPOLARIZÁCIÓS JELENSÉG BEMUTATÁSA FIZIKAI HALLGATÓI LABORATÓRIUMBAN
 Fiia Modern fiia GY KRSZTPOLARIZÁCIÓS JLNSÉG BMUTATÁSA FIZIKAI HALLGATÓI LABORATÓRIUMBAN DMONSTRATION OF AN OPTICAL CROSS- POLARIZATION FFCT IN A STUDNT LABORATORY Kőhái-Kis Ambrus, Nag Péter 1 Kecseméti
Fiia Modern fiia GY KRSZTPOLARIZÁCIÓS JLNSÉG BMUTATÁSA FIZIKAI HALLGATÓI LABORATÓRIUMBAN DMONSTRATION OF AN OPTICAL CROSS- POLARIZATION FFCT IN A STUDNT LABORATORY Kőhái-Kis Ambrus, Nag Péter 1 Kecseméti
ű Ö ű ű Ú Ú ű
 ű Ö ű ű Ú Ú ű Á Á Ö Ö Ö Ö Ö Ö Á Ö Á Á Á Ú Á Á Á Á Ö ű ű Á ű ű ű Ö Ö Á Á Á Á Á ű Ú Ö ű Ú Ú ű Ú Á Á ű ű ű ű ű ű Á ű ű Á Á Ő Á Á Á Á Á Á Ö Á ű ű Ö Ö ű Ú Ö Ú ű Ú ű ű ű ű ű Ö Á Ú ű Á Ö Á Ú Á Á Á Á Á Á Ö Ö Á
ű Ö ű ű Ú Ú ű Á Á Ö Ö Ö Ö Ö Ö Á Ö Á Á Á Ú Á Á Á Á Ö ű ű Á ű ű ű Ö Ö Á Á Á Á Á ű Ú Ö ű Ú Ú ű Ú Á Á ű ű ű ű ű ű Á ű ű Á Á Ő Á Á Á Á Á Á Ö Á ű ű Ö Ö ű Ú Ö Ú ű Ú ű ű ű ű ű Ö Á Ú ű Á Ö Á Ú Á Á Á Á Á Á Ö Ö Á
x y amelyeket az összenyomhatatlanságot kifejezőkontinuitási egyenlet egészít ki: v x p v
 A asonóság transormácó a sócsaág sámításoná A asonóság transormácó a sócsaág sámításoná DR BENKŐJÁNOS Agrártudomán Egetem GödöőMeőgadaság Gétan Intéet A terveő a sócsaága méreteésére a egat megodás ánáan
A asonóság transormácó a sócsaág sámításoná A asonóság transormácó a sócsaág sámításoná DR BENKŐJÁNOS Agrártudomán Egetem GödöőMeőgadaság Gétan Intéet A terveő a sócsaága méreteésére a egat megodás ánáan
 1 2 A Z E G O V I S S Z A V Á G A s o r s f o r d í t ó m e g b o c s á t á s e s z ü n k b e i d é z i, h o g y e m b e r i m e g t a p a s z t a l á s t á t é l, s p i r i t u á v a g y u n k, s á el
1 2 A Z E G O V I S S Z A V Á G A s o r s f o r d í t ó m e g b o c s á t á s e s z ü n k b e i d é z i, h o g y e m b e r i m e g t a p a s z t a l á s t á t é l, s p i r i t u á v a g y u n k, s á el
Segédlet Egyfokozatú fogaskerék-áthajtómű méretezéséhez
 Pécsi Tudományegyetem Pollack Mihály Műszaki Kar Gépszerkezettan tanszék Segédlet Egyfokozatú fogaskerék-áthajtómű méretezéséhez Összeállította: Dr. Stampfer Mihály Pécs, 0. . A fogaskerekek előtervezése.
Pécsi Tudományegyetem Pollack Mihály Műszaki Kar Gépszerkezettan tanszék Segédlet Egyfokozatú fogaskerék-áthajtómű méretezéséhez Összeállította: Dr. Stampfer Mihály Pécs, 0. . A fogaskerekek előtervezése.
3. KISFESZÜLTSÉGŰ VEZETÉKEK MÉRETEZÉSE
 Vamos műk KSFESZÜLTSÉGŰ VEZETÉKEK MÉRETEZÉSE ksfszütségű áózatok fadata a fogyasztók amos nrgáa aó átása ztékk fontos fadatának átásában fontos szrp an az nrgaszogátatás mnőségét, bztonságát és gazdaságosságát
Vamos műk KSFESZÜLTSÉGŰ VEZETÉKEK MÉRETEZÉSE ksfszütségű áózatok fadata a fogyasztók amos nrgáa aó átása ztékk fontos fadatának átásában fontos szrp an az nrgaszogátatás mnőségét, bztonságát és gazdaságosságát
LEGYEN MÁS A SZENVEDÉLYED!
 E g y ü t t m z k ö d é s i a j á n l a t L E G Y E N M Á S A S Z E N V E D É L Y E D! 2. E F O P - 1. 8. 9-1 7 P á l y á z a t i t e r v e z e t 3. 0 ( F o r r á s : w w w. p a l y a z a t. g o v. h u
E g y ü t t m z k ö d é s i a j á n l a t L E G Y E N M Á S A S Z E N V E D É L Y E D! 2. E F O P - 1. 8. 9-1 7 P á l y á z a t i t e r v e z e t 3. 0 ( F o r r á s : w w w. p a l y a z a t. g o v. h u
Tartóprofilok Raktári program
 Tartóproflok Raktár program ThenKrupp Ferroglou ThenKrupp Nolcadk kadá 6. áprl Ötvözetlen é alacon ötvözéú lemeztermékek Betonacélok Szerzámacélok Melegen hengerelt rúdacélok Könnú - é zínefémek Rozdamente
Tartóproflok Raktár program ThenKrupp Ferroglou ThenKrupp Nolcadk kadá 6. áprl Ötvözetlen é alacon ötvözéú lemeztermékek Betonacélok Szerzámacélok Melegen hengerelt rúdacélok Könnú - é zínefémek Rozdamente
hajlító nyomaték és a T nyíróerő között ugyanolyan összefüggés van, mint az egyenes rudaknál.
 5 RÚDELADATOK 51 íkgörbe rudk Grhof 1 -féle elmélete íkgörbe rúd: rúd köépvonl ( ponti ál) íkgörbe e P n e t Jelöléek: A köépvonl mentén pontokt ívkoordinátávl onoítjuk Pl P pont A P pontbn (P pontho trtoó
5 RÚDELADATOK 51 íkgörbe rudk Grhof 1 -féle elmélete íkgörbe rúd: rúd köépvonl ( ponti ál) íkgörbe e P n e t Jelöléek: A köépvonl mentén pontokt ívkoordinátávl onoítjuk Pl P pont A P pontbn (P pontho trtoó
 ü ű ö Á ö Ü Ú Ö Á Á ö ő ö ö ö ű ű ö ő ő ö ő ü Ú ú ü ö ö ő Ö ö ő ö ő ő ö ú ö ő ő ö ö ú ö ő ö ö ő ö ö ő ö ő ö Ö ö ö ö ő ö ő ö ö ö ü ű ö ö ő ö ö ű ö ő ö ö ű ö ü ö ö ö ő ö ö ő ű ö ö ü ű ö ö ő ö ö ü ő ő ő ő
ü ű ö Á ö Ü Ú Ö Á Á ö ő ö ö ö ű ű ö ő ő ö ő ü Ú ú ü ö ö ő Ö ö ő ö ő ő ö ú ö ő ő ö ö ú ö ő ö ö ő ö ö ő ö ő ö Ö ö ö ö ő ö ő ö ö ö ü ű ö ö ő ö ö ű ö ő ö ö ű ö ü ö ö ö ő ö ö ő ű ö ö ü ű ö ö ő ö ö ü ő ő ő ő
Szerkezetek numerikus modellezése az építőmérnöki gyakorlatban
 Szrkztk numrikus modllzés az éítőmérnöki gakorlatban intéztigazgató hltts, tanszékvztő, őiskolai docns a Magar Éítész Kamara tagja, a Magar Mérnöki Kamara tagja a ib Nmztközi Btonszövtség Magar Tagozatának
Szrkztk numrikus modllzés az éítőmérnöki gakorlatban intéztigazgató hltts, tanszékvztő, őiskolai docns a Magar Éítész Kamara tagja, a Magar Mérnöki Kamara tagja a ib Nmztközi Btonszövtség Magar Tagozatának
III. Differenciálszámítás
 III Dinciálszámítás A inciálszámítás számnka lsősoban aa aló hog mgállapítsk hogan áltoznak a kémiában nag számban lőoló többáltozós üggénk A inciálszámítás mgaja a áltozás sbsségét báml kiszmlt pontban
III Dinciálszámítás A inciálszámítás számnka lsősoban aa aló hog mgállapítsk hogan áltoznak a kémiában nag számban lőoló többáltozós üggénk A inciálszámítás mgaja a áltozás sbsségét báml kiszmlt pontban
A kötéstávolság éppen R, tehát:
 Forgás és rzgés spktroszkópa:. Határozzuk mg a kövtkző részcskék rdukált tömgét: H H, H 35 Cl, H 37 Cl, H 35 Cl, H 7 I Egy m és m tömgű atomból álló kétatomos molkula rdukált tömg () dfnícó szrnt: mm vagy
Forgás és rzgés spktroszkópa:. Határozzuk mg a kövtkző részcskék rdukált tömgét: H H, H 35 Cl, H 37 Cl, H 35 Cl, H 7 I Egy m és m tömgű atomból álló kétatomos molkula rdukált tömg () dfnícó szrnt: mm vagy
E F O P
 E g y ü t t m z k ö d é s i a j á n l a t K ö z ö s é r t é k e i n k s o k s z í n z t á r s a d a l o m E F O P - 1.3.4-1 6 P á l y á z a t i t e r v e z e t 2. 0 ( F o r r á s : w w w. p a l y a z a
E g y ü t t m z k ö d é s i a j á n l a t K ö z ö s é r t é k e i n k s o k s z í n z t á r s a d a l o m E F O P - 1.3.4-1 6 P á l y á z a t i t e r v e z e t 2. 0 ( F o r r á s : w w w. p a l y a z a
5. MECHANIKA STATIKA GYAKORLAT Kidolgozta: Szabó Tamás egy. doc., Triesz Péter egy. ts.
 SZÉCHENYI ISTVÁN EGYETE GÉPSZERKEZETTAN ÉS ECHANIKA TANSZÉK. ECHANIKA STATIKA GYAKORLAT Kidolgozta: Szabó Tamás g. doc., Trisz Pétr g. ts. Erőrndszr rdő vtorttős, párhuzamos rőrndszr, vonal mntén mgoszló
SZÉCHENYI ISTVÁN EGYETE GÉPSZERKEZETTAN ÉS ECHANIKA TANSZÉK. ECHANIKA STATIKA GYAKORLAT Kidolgozta: Szabó Tamás g. doc., Trisz Pétr g. ts. Erőrndszr rdő vtorttős, párhuzamos rőrndszr, vonal mntén mgoszló
MATEMATIKA FELADATLAP a 8. évfolyamosok számára
 2008. jnuár 31. MATEMATIKA FELADATLAP 8. évfolymosok számár 2008. jnuár 31. 15:00 ór M 2 fltlp NÉV: SZÜLETÉSI ÉV: HÓ: NAP: Tolll olgozz! Zsszámológépt nm hsználhtsz. A fltokt ttszés szrinti sorrnn olhto
2008. jnuár 31. MATEMATIKA FELADATLAP 8. évfolymosok számár 2008. jnuár 31. 15:00 ór M 2 fltlp NÉV: SZÜLETÉSI ÉV: HÓ: NAP: Tolll olgozz! Zsszámológépt nm hsználhtsz. A fltokt ttszés szrinti sorrnn olhto
Méret: Végződés: Min. hőmérséklet: Max. hőmérséklet: Max. nyomás: Specifikációk:
 LÉY PXY B 1 2 P UI G I B t: őd: in. hőmkt: x. hőmkt: x. nomá: pcifikációk: nok: D 2-tő 250-i imák P /1 - C 0 C B tbn b D 250-i ni t jokt nc pox bonto kimák PXY 21 B P UI G I B PCIFICIÓ: ni t jokt táuát
LÉY PXY B 1 2 P UI G I B t: őd: in. hőmkt: x. hőmkt: x. nomá: pcifikációk: nok: D 2-tő 250-i imák P /1 - C 0 C B tbn b D 250-i ni t jokt nc pox bonto kimák PXY 21 B P UI G I B PCIFICIÓ: ni t jokt táuát
M7 KÖNYÖKIDOM ÁRAMKÉPÉNEK VIZSGÁLATA ÉS VESZTESÉGTÉNYEZŐJÉNEK MEGHATÁROZÁSA
 M7 KÖNYÖKIDOM ÁRAMKÉPÉNEK VIZSGÁLATA ÉS VESZTESÉGTÉNYEZŐJÉNEK MEGHATÁROZÁSA. A mérés célja A csőztébn az áramlás rányáltozását önyödomoal, csőíl oldjá mg. Az rányáltozás jlntős áramlás sztségl jár, amlyn
M7 KÖNYÖKIDOM ÁRAMKÉPÉNEK VIZSGÁLATA ÉS VESZTESÉGTÉNYEZŐJÉNEK MEGHATÁROZÁSA. A mérés célja A csőztébn az áramlás rányáltozását önyödomoal, csőíl oldjá mg. Az rányáltozás jlntős áramlás sztségl jár, amlyn
1. sz. melléklet: Ügyféllel kötendő szerződésekre vonatkozó formanyomtatványok
 99 AZ ÜZLETSZABÁLYZATA 1. sz. melléklet: Ügyféllel kötendő szerződésekre vonatkozó formanyomtatványok 100 AZ ÜZLETSZABÁLYZATA Adásvételi szerződés Vevő: SPB Befektetési Részvénytársaság Adószám: Fiók:
99 AZ ÜZLETSZABÁLYZATA 1. sz. melléklet: Ügyféllel kötendő szerződésekre vonatkozó formanyomtatványok 100 AZ ÜZLETSZABÁLYZATA Adásvételi szerződés Vevő: SPB Befektetési Részvénytársaság Adószám: Fiók:
 ᔗ勗 tér ᔗ厗k n ü 2011. c u 04- n k h ó ᔗ厗k n ü Község 2011. c u 04- n megt rtott közmegh llg tásáról Ü h : Község Műᔗ勗elᔗ勗ᔗ勗ésᔗ勗 házáᔗ勗 ᔗ勗 ᔗ勗 tér n nn k: ᔗ勗oᔗ勗ák ᔗ勗ál olgármester eᔗ勗th ᔗ勗stᔗ勗áᔗ勗 l olgármester
ᔗ勗 tér ᔗ厗k n ü 2011. c u 04- n k h ó ᔗ厗k n ü Község 2011. c u 04- n megt rtott közmegh llg tásáról Ü h : Község Műᔗ勗elᔗ勗ᔗ勗ésᔗ勗 házáᔗ勗 ᔗ勗 ᔗ勗 tér n nn k: ᔗ勗oᔗ勗ák ᔗ勗ál olgármester eᔗ勗th ᔗ勗stᔗ勗áᔗ勗 l olgármester
10. OPTIMÁLÁSI LEHETŐSÉGEK A MŰVELET-ELEMEK TERVEZÉSEKOR
 10. OPIMÁLÁSI LEHEŐSÉGEK A MŰVELE-ELEMEK ERVEZÉSEKOR A technológiai terezés ezen szintén a fő feladatok a köetkezők: a forgácsolási paraméterek meghatározása, a szerszám mozgásciklusok (üresárati, munkautak)
10. OPIMÁLÁSI LEHEŐSÉGEK A MŰVELE-ELEMEK ERVEZÉSEKOR A technológiai terezés ezen szintén a fő feladatok a köetkezők: a forgácsolási paraméterek meghatározása, a szerszám mozgásciklusok (üresárati, munkautak)
2-17. ábra 2-18. ábra. Analízis 1. r x = = R = (3)
") A -17. ábra olyan centrifugáli tengelykapcolót mutat, melyben a centrifugáli erő hatáára kifelé mozgó golyók ékpálya-hatá egítégével zorítják öze a urlódótárcát. -17. ábra -18. ábra Analízi 1 A -17. ábrán
A -17. ábra olyan centrifugáli tengelykapcolót mutat, melyben a centrifugáli erő hatáára kifelé mozgó golyók ékpálya-hatá egítégével zorítják öze a urlódótárcát. -17. ábra -18. ábra Analízi 1 A -17. ábrán
3. MECHANIKA STATIKA GYAKORLAT Kidolgozta: Triesz Péter egy. ts. Három erő egyensúlya
 SZÉHENYI ISTVÁN EGYETEM GÉPSZERKEZETTN ÉS MEHNIK TNSZÉK 3 MEHNIK STTIK GYKORLT Kdolgozt: Tsz Pét gy ts Háom ő gynsúly 3 Péld: dott gy mlőszkzt mét és thlés: m b 5 m c 5 m 0 kn ldt: y c Htáozz mg z és támsztóőkt
SZÉHENYI ISTVÁN EGYETEM GÉPSZERKEZETTN ÉS MEHNIK TNSZÉK 3 MEHNIK STTIK GYKORLT Kdolgozt: Tsz Pét gy ts Háom ő gynsúly 3 Péld: dott gy mlőszkzt mét és thlés: m b 5 m c 5 m 0 kn ldt: y c Htáozz mg z és támsztóőkt
MÓR TELEPÜLÉSRENDEZÉSI TERVE 4. SZ. MÓDOSÍTÁS
 1 MÓR TELEPÜLÉSRENDEZÉSI TERVE 4. SZ. MÓDOSÍTÁS JSZ: 1/2011 A HÉSZ ÉS A SZABÁLYOZÁSI TERV ELFOGADVA A 3/2012. (I. 26.) ÖK. RENDELETTEL VIRÁNYI ÉPÍTÉSZ STÚDIÓ KFT 2012. JANUÁR 2 ALÁÍRÓLAP TELEPÜLÉSTERVEZÉS:.
1 MÓR TELEPÜLÉSRENDEZÉSI TERVE 4. SZ. MÓDOSÍTÁS JSZ: 1/2011 A HÉSZ ÉS A SZABÁLYOZÁSI TERV ELFOGADVA A 3/2012. (I. 26.) ÖK. RENDELETTEL VIRÁNYI ÉPÍTÉSZ STÚDIÓ KFT 2012. JANUÁR 2 ALÁÍRÓLAP TELEPÜLÉSTERVEZÉS:.
ANYANYELVI FELADATLAP a 8. évfolyamosok számára
 2006. fruár 2. ANYANYELVI FELADATLAP 8. évfolymosok számár 2006. fruár 2. 14:00 ór NÉV: SZÜLETÉSI ÉV: HÓ: NAP: A fltokt ttszés szrinti sorrnn olhto mg. Ügylj mgfllő iőosztásr és küllkr! Tolll olgozz! A
2006. fruár 2. ANYANYELVI FELADATLAP 8. évfolymosok számár 2006. fruár 2. 14:00 ór NÉV: SZÜLETÉSI ÉV: HÓ: NAP: A fltokt ttszés szrinti sorrnn olhto mg. Ügylj mgfllő iőosztásr és küllkr! Tolll olgozz! A
Szervomotor sebességszabályozása
 Srvomotor sbsségsabályoása. A gyaorlat célja Egynáramú srvomotor sbsségsabályoásána trvés. A motorsabályoás programváána flépítés. A sbsség rányítás algortms mgvalósítása valós dbn. 2. Elmélt bvt A motor
Srvomotor sbsségsabályoása. A gyaorlat célja Egynáramú srvomotor sbsségsabályoásána trvés. A motorsabályoás programváána flépítés. A sbsség rányítás algortms mgvalósítása valós dbn. 2. Elmélt bvt A motor
Általános felhívások... 8. DIN EN 13659 szerinti szélellenállási- és teljesít képességi osztályok... 9. nova el tétred nyök standard színekben...
 Tartalomjegyzék Általános felhívások... 8 DIN EN 659 szerinti szélellenállási- és teljesít képességi osztályok... 9 nova el tétred nyök standard színekben... A tokméretek táblázatainak áttekintése... 4
Tartalomjegyzék Általános felhívások... 8 DIN EN 659 szerinti szélellenállási- és teljesít képességi osztályok... 9 nova el tétred nyök standard színekben... A tokméretek táblázatainak áttekintése... 4
ELSÔ FEJEZET St. Ives-ház Grosvenor Square, London
 ELSÔ FEJEZET St. Ivs-ház Grosvnor Squar, London Ez így gyszrűn nm tisztsségs. Elizabth Margurit Cynstr, akit mindnki csak Elizának hívott, alig hallhatóan méltatlankodott. Egydül állt köpönygbn gy hatalmas
ELSÔ FEJEZET St. Ivs-ház Grosvnor Squar, London Ez így gyszrűn nm tisztsségs. Elizabth Margurit Cynstr, akit mindnki csak Elizának hívott, alig hallhatóan méltatlankodott. Egydül állt köpönygbn gy hatalmas
=... =...e exponenciális alakú a felírása. komplex számok nagyságai és x tengellyel bezárt szögei. Feladat: z1z 2
 SZÉCHENYI ISTVÁN EGYETEM MECHANIKA - REZGÉSTAN ALKALMAZOTT MECHANIKA TANSZÉK Eméet édése és váaso eyetem aapépésben (BS épésben) éstvevı ménöhaató sámáa (0) Matemata aapo A eméet édése öött seepehetne
SZÉCHENYI ISTVÁN EGYETEM MECHANIKA - REZGÉSTAN ALKALMAZOTT MECHANIKA TANSZÉK Eméet édése és váaso eyetem aapépésben (BS épésben) éstvevı ménöhaató sámáa (0) Matemata aapo A eméet édése öött seepehetne
LVÉNY. SZERE Kft. 598/599
 L RE 598/5 IITEL K I R I B GÖ n.hu v l n.hu v l EL RI KIIT I B GÖ EIFIKÁIÓK: Tlj fut. típu. Δp mx.: b HZNÁLT: Koóív köh indn köön foldk tbn. x. Hőmklt Átl: 0. x. Nomá Átl: 1 b DN-i 10 b fltt ÁLZTÉK: Rthtó
L RE 598/5 IITEL K I R I B GÖ n.hu v l n.hu v l EL RI KIIT I B GÖ EIFIKÁIÓK: Tlj fut. típu. Δp mx.: b HZNÁLT: Koóív köh indn köön foldk tbn. x. Hőmklt Átl: 0. x. Nomá Átl: 1 b DN-i 10 b fltt ÁLZTÉK: Rthtó
ELSÔ FEJEZET 1829. március Wadham Gardens, London
 ELSÔ FEJEZET 1829. március Wadham Gardns, London Amint bttt a lábát Lady Hrford szalonjába, Hathr Cynstr tudta, hogy lgutóbbi trv, miszrint mgfllő férjt talál magának, kudarcra van ítélv. Egy távoli sarokban
ELSÔ FEJEZET 1829. március Wadham Gardns, London Amint bttt a lábát Lady Hrford szalonjába, Hathr Cynstr tudta, hogy lgutóbbi trv, miszrint mgfllő férjt talál magának, kudarcra van ítélv. Egy távoli sarokban
Együttműködési ajánlat A társadalmi kohézió erősítése az egyházak közösségfejlesztő tevékenységének bővítésével EFOP Pályázati tervezet 2.
 E g y ü t t m z k ö d é s i a j á n l a t A t á r s a d a l m i k o h é z i ó e r p s í t é s e a z e g y h á z a k k ö z ö s s é g f e j l e s z t p t e v é k e n y s é g é n e k b p v í t é s é v e l
E g y ü t t m z k ö d é s i a j á n l a t A t á r s a d a l m i k o h é z i ó e r p s í t é s e a z e g y h á z a k k ö z ö s s é g f e j l e s z t p t e v é k e n y s é g é n e k b p v í t é s é v e l
Kisbodaki Harangláb Kisbodak Község Önkormányzatának lapja 2012. február hó V. évfolyam 1. szám
 Kibodaki Haangláb Kibodak Közég Önkományzatának lapja 2012. fbuá hó V. évfolyam 1. zám hatályát vzttt a kataztófák llni védkzé iányítááól, zvztéől é a vzély anyagokkal kapcolato úlyo baltk llni védkzéől
Kibodaki Haangláb Kibodak Közég Önkományzatának lapja 2012. fbuá hó V. évfolyam 1. zám hatályát vzttt a kataztófák llni védkzé iányítááól, zvztéől é a vzély anyagokkal kapcolato úlyo baltk llni védkzéől
 VoIP h á l ó z a t ok m á s s z e m s z ö g b ő l HBONE t á b o r 2003. n o v e m b e r 4-6. K e r e k e s T i b o r, L N X L I A S - N E T W O R X H Á L Ó Z A T I N T E G R Á C I Ó S R t. 1 Témák M ú
VoIP h á l ó z a t ok m á s s z e m s z ö g b ő l HBONE t á b o r 2003. n o v e m b e r 4-6. K e r e k e s T i b o r, L N X L I A S - N E T W O R X H Á L Ó Z A T I N T E G R Á C I Ó S R t. 1 Témák M ú
Készült a Gazdasági Versenyhivatal Versenykultúra Központjának támogatásával. 2010. november
 A 2 -e g y b e n, 3-e g y b e n c s o m a g a j á n l a t o k f o g y a s z t ó i m e g í t é l é s e é s h a t áv se a r s a e n y r e a h í r k ö z l é s i p i a c o n Készült a Gazdasági Versenyhivatal
A 2 -e g y b e n, 3-e g y b e n c s o m a g a j á n l a t o k f o g y a s z t ó i m e g í t é l é s e é s h a t áv se a r s a e n y r e a h í r k ö z l é s i p i a c o n Készült a Gazdasági Versenyhivatal
Szerző: Böröcz Péter János H-9026, Egyetem tér 1. Győr, Magyarország
 In: Kóczy L, éánczos L, Bakó A, Prznszki J, Szgdi Z, Várlaki P (szrk.) Játéklmélt alkalmazási lhtőségi a logisztikai rndszrkbn - az gy- és többutas szállítási csomagolási szközök közötti döntéslmélti probléma
In: Kóczy L, éánczos L, Bakó A, Prznszki J, Szgdi Z, Várlaki P (szrk.) Játéklmélt alkalmazási lhtőségi a logisztikai rndszrkbn - az gy- és többutas szállítási csomagolási szközök közötti döntéslmélti probléma
69. PÉCSI GEORALLYE. ETAP HOSSZA: 23 km ÚTVONAL: - RAJT
 69. CSI GORALLY CS 2012. 10. 12-13. Az itiner 4 lapból áll. NM KLL G..S. TA TA HOSSZA: 23 km ÁTLAGSSSG: 15 km/h Az etapot készítette: Sebestyén György + FLADAT IDÕ: 28 perc Az etapot ellenõrizte: Sebestyén
69. CSI GORALLY CS 2012. 10. 12-13. Az itiner 4 lapból áll. NM KLL G..S. TA TA HOSSZA: 23 km ÁTLAGSSSG: 15 km/h Az etapot készítette: Sebestyén György + FLADAT IDÕ: 28 perc Az etapot ellenõrizte: Sebestyén
Múlt BETSBŐL Szombaton 23. 3tán. 1787.-
 Múlt BETSBŐL Szombaton 23. 3tán. 1787.- : o-^a a' közl fkvő dolgot4s homállyofon látó, ** -R- fávól l é v ő k t pdig tsak képzlni fm tudd né- "ljy Bétsi köz uéptől tudakoznók: mikor érkzika' F. Mónárkha?
Múlt BETSBŐL Szombaton 23. 3tán. 1787.- : o-^a a' közl fkvő dolgot4s homállyofon látó, ** -R- fávól l é v ő k t pdig tsak képzlni fm tudd né- "ljy Bétsi köz uéptől tudakoznók: mikor érkzika' F. Mónárkha?
Elektronikus közelítéskapcsolók
 Elektronikus közelítéskapcsolók A Mechatronikában az érzékelők (szenzorok) szinte minden fajtáját alkalmazzák A közelítéskapcsolók csoportosítása a működési alapelvük szerint: 1. mágneses közelítéskapcsolók;
Elektronikus közelítéskapcsolók A Mechatronikában az érzékelők (szenzorok) szinte minden fajtáját alkalmazzák A közelítéskapcsolók csoportosítása a működési alapelvük szerint: 1. mágneses közelítéskapcsolók;
 Ó é ü ú á á á á Í ő é á é ú á á á é é ü á é á á ľ á óľ ľ Ó ő ł ĺ á ü é éľ ü é ú á á á á ľ á á á ű é á é Ę ú á á ö á á ö á é é ó ó á á á é é á é á á ö á é á é á á á í á áĺ Íá á á ľ ő ó á é ő é é é á ő á
Ó é ü ú á á á á Í ő é á é ú á á á é é ü á é á á ľ á óľ ľ Ó ő ł ĺ á ü é éľ ü é ú á á á á ľ á á á ű é á é Ę ú á á ö á á ö á é é ó ó á á á é é á é á á ö á é á é á á á í á áĺ Íá á á ľ ő ó á é ő é é é á ő á