Budapesti Műszaki és Gazdaságtudományi Egyetem Villamosmérnöki és Informatikai Kar Irányítástechnika és Informatika Tanszék DARU IRÁNYÍTÁSA
|
|
|
- Éva Szabó
- 8 évvel ezelőtt
- Látták:
Átírás

1 Budapesti Műszaki és Gazdaságtudományi Egyetem Villamosmérnöki és Informatikai Kar Irányítástechnika és Informatika Tanszék DARU IRÁNYÍTÁSA Önálló laboratórium beszámoló Készítette: Menyhárt Balázs BDVUD4 Papp Dávid FNHTXB Konzulens: Dr. Kiss Bálint május 17.

2 Tartalomjegyzék 1. Bevezetés Hardver elemek A darufej felépítése A Quanser Q8 csatlakozópanelje Az összeköttetések megvalósítása Connection Connection Connection Connection Connection Connection A szoftveres irányítás megvalósítása Programozás Feszültség szabályzás Pozíció szabályzás Sebesség szabályzás Simulink Program: Vezérlés engedélyezése Érzékelők Vezérlés WinCon Kezelőfelületek Egyéb próbálkozások, és lehetőségek a jövőre nézve Irányítás gamepad segítségével Egyéb lehetőségek

3 1. Bevezetés A félév során a BME Irányítástechnika és Informatika Tanszékének IB313-as laborjában található darumodell irányításával foglalkoztunk. Munkánk során megismertük a modell hardver elemeit, a beavatkozó szervek és érzékelők működését, ezek összeköttetéseit a gyorsprototípustervező eszközzel. A rendszerhez mi magunk is további összeköttetéseket terveztünk, és valósítottunk meg. Alaposan megismerkedtünk a Quanser Q8 gyorsprototípus eszköz felépítésével, működésével és a hozzá tartozó WinCon szoftverkörnyezet elemeivel, valamint ehhez kapcsolódóan a Matlab Simulink grafikus fejlesztői környezetével. Létrehoztunk egy rendszert, amely lehetővé teszi a modell jeleinek SI mértékegységben való mérését, jelalakjainak rögzítését, és a daru vízszintes mozgásának irányítását többféle módon: az előállt rendszer tartalmaz feszültségjellel történő irányítást, soros kompenzátorral megvalósított pozíciószabályozást, és mozgóátlag segítségével meghatározott sebességmérésen alapuló sebességszabályozást. Beszámolónkban ismertetjük a rendszerünk fizikai felépítését, az elkészített szoftveres irányítás működését és tervezési szempontjait, és kitérünk a téma jövőbeli folytatási lehetőségeire is. 2

4 2. Hardver elemek A rendszer az alábbi fizikai komponensekből áll: - vezérlő PC a benne elhelyezett gyorsprototípus eszköz kártyájával - a gyorsprototípus eszköz csatlakozópanelje, amelybe a vezetékeket bekötjük - csatlakozások és összeköttetések, vezetékezés - a darut vízszintesen mozgató sín, ennek pozíciót visszajelző inkrementális adója, és a hozzá tartozó Amira teljesítményelektronika - a daru feje : o a kötél hosszát változtató Maxon motor beépített inkrementális adóval, és a hozzá tartozó teljesítményelektronika o inkrementális adó a kötél lengési szögének mechanikus mérésére o lézeres jeladók a kötél lengési szögsebességének pontosabb mérésére Ezt az alábbi séma is összefoglalja: 3

5 A munkát először a DSpace DS 1102 gyorsprototípus eszközzel kezdtük. Ennek működését is elég alaposan megismertük, amely tanulságos volt számunkra, de hosszú távú terveinkre nézve nem bizonyult megfelelőnek, mivel ezen az eszközön csak két inkrementális adó bemenet van, és nekünk három jelet kellett inkrementális adóval mérnünk (vízszintes elmozdulás, kötél hossza, kötél lengési szöge). Ezért hamarosan áttértünk a Quanser Q8 eszközre, amelybe akár nyolc enkóder is beköthető. A félév további részében végig erre az eszközre fejlesztettünk. A mozgató sínre felszereltük a darufejet, lecserélve az előzőleg ott található ingát. Megterveztük az összeköttetéseket, amelyeknek elég hosszúnak kellett lenniük, hogy a mozgató sín kábelcsatornáján átkanyarodva elérjenek a vezérlő számítógépig. Az alkatrészeket beszereztük, és legyártottuk a kábeleket. Erről a munkáról részletes dokumentációt készítettünk A darufej felépítése Az alábbi képen látható az érzékelők és beavatkozó szervek elhelyezkedése: 1. A kötelet tekerő motor, végén inkrementális adó 2. Mechanikus szögmérő inkrementális adó 3. Lézerkapuk 4

6 2.2. A Quanser Q8 csatlakozópanelje 1. Csatlakozás a PC-hez 2. Analóg kimenetek (RCA) 3. Digitális ki-és bemenetek (DIO) 4. Inkrementális adó bemenetek (DIN) 5. Analóg bemenetek (RCA) 2.3. Az összeköttetések megvalósítása A régebben használt DSpace rendszerhez már rendelkezésre álltak bizonyos kábelek, ezek azonban nem voltak elég hosszúak ahhoz, hogy a darut a sínre felszerelve is elérjenek a vezérlő számítógépig. A kábelezés újratervezésének másik oka az volt, hogy a Quanser csatlakozópaneljén másfajta csatlakó aljzatok vannak. Ezen szempontok alapján készítettük el a kábeleket. 5


7 A hangfalkábelekre elválasztó elemeket helyeztünk el, hogy későbbi csatlakoztatásukat megkönnyítsük. Megállapodás alapján ezek az összekötő elemek nagyobbak és kisebbek lettek annak megkülönböztetése érdekében, hogy az adott kábelen teljesítmény, vagy vezérlőjel megy. Az alábbi séma foglalja össze a részegységek közötti összeköttetéseket: kifejteni. A csatlakozásokat Connection 1-6 fedőnevekkel láttuk el. Ezeket fogjuk az alábbiakban Connection 1 Az Amira teljesítményelektronika és a Quanser csatlakozópanel közötti összeköttetéseket foglalja össze. Ebbe az alábbiak tartoznak bele: - a vízszintes pozíció inkrementális adója (DIN) - az Amira részére a PC vezérlés engedélyezését kérő digitális jelsorozatot szállító szalagkábel (DIO) - a vízszintes mozgató sín vezérlését megvalósító feszültség beavatkozó jel (RCA) Az Amira oldaláról mindhárom jel egy közös csatlakozón indul, és összekötegelt kábelek formájában ér el a Quanser csatlakozópanelig, ahol háromfelé szétválva a fenti felsorolásban zárójelben megjelölt aljzatokba csatlakozik. 6



8 Connection 2 Hangfalkábel, amely a kötelet fel- és letekerő Maxon motort köti össze a hozzá tartozó teljesítményelektronikával (kép). Ezen kapja a motor az áramjelet, amely a nyomatékot állítja elő számára. A kábelnek 2.5 méter hosszúnak kellett lennie, hogy a kábelcsatornán átvezetve elérjen a darufejtől a teljesítményelektronikáig, amely a sín mögött található polcon van Connection 3 A Quanser csatlakozódobozát köti össze a fenti képen látható Maxon teljesítményelektronikával. Ezen továbbítódik a kötelet engedő motor részére a PC-ről kiadott feszültség vezérlőjel. A megvalósítása hangfalkábellel történt, amely RCA csatlakozóval csatlakozik a Quanser analóg kimenetére. A kábel hossza 4.5 méter Connection 4 A kötél hosszúságát mérő enkóder összeköttetése a Quanser enkóder bemenetével. A motor enkódere az alábbi kivezetéssel rendelkezik: 7

9 Ezt egy megfelelő csatlakozóval továbbvezettük egy 6 méter hosszú 10 szálas szalagkábel segítségével, majd a végére DIN csatlakozót forrasztottunk, amellyel a Quanser enkóder bemenetébe bedughatjuk. Az enkóder jelei közül a Vcc, Gnd, A, B, és I jeleket használjuk, a negált jeleket elhagyjuk. Ezeket a Quanser csatlakozó aljzatának lábkiosztása szerint csatlakoztatjuk, az alábbi kép szerint (a hím csatlakozóra a bekötés értelemszerűen tükrözve történt). A későbbi mérések során megállapítottuk, hogy a Maxon motor enkódere nem működik, így ezen az ágon nem tudtuk folytatni a munkát Connection 5 A mechanikus szögmérő enkóder csatlakoztatása a Quanser csatlakozódoboz enkóder bemenetéhez. Az enkóder kimenete 5 szálas szalagkábel az alábbi lábkiosztás szerint: Ez a kábel is 6 méter hosszú. Csatlakoztatása a Quanser-hez az előző enkóderrel megegyező módon DIN csatlakozóval történik. 8

10 Connection 6 A lézeres érzékelőhöz tartozik egy kiegészítő áramkör, amely feszültségszint-illesztő és tartószerv funkciókat lát el. Ez az áramkör a következő jelekkel kapcsolódik a gyorsprototípus eszközhöz: Gnd, Q1, Q2, CLR1, CLR2. Ez az áramkör is korábban a DSpace eszközzel volt használva, amelyhez már rendelkezésre állt egy D-Sub csatlakozó a jobb oldali képen látható lábkiosztással. Ezt a csatlakozót meghagytuk, hogy az eszközzel foglalkozó kolléga továbbra is használhassa a DSpace-re létrehozott rendszerét. Egy olyan kábelt terveztünk, amely segítségével ezek a jelek a Quanser-re is továbbvezethetőek. A másfél méter hosszú 16 szálas szalagkábel erre a D-Sub kábelvégre csatlakoztatható, és 2x8 pin-es csatlakozó formájában a Quanser digitális aljzataiba csatlakoztatható. A pin-ek kiosztását az alábbi ábrák mutatják: 9

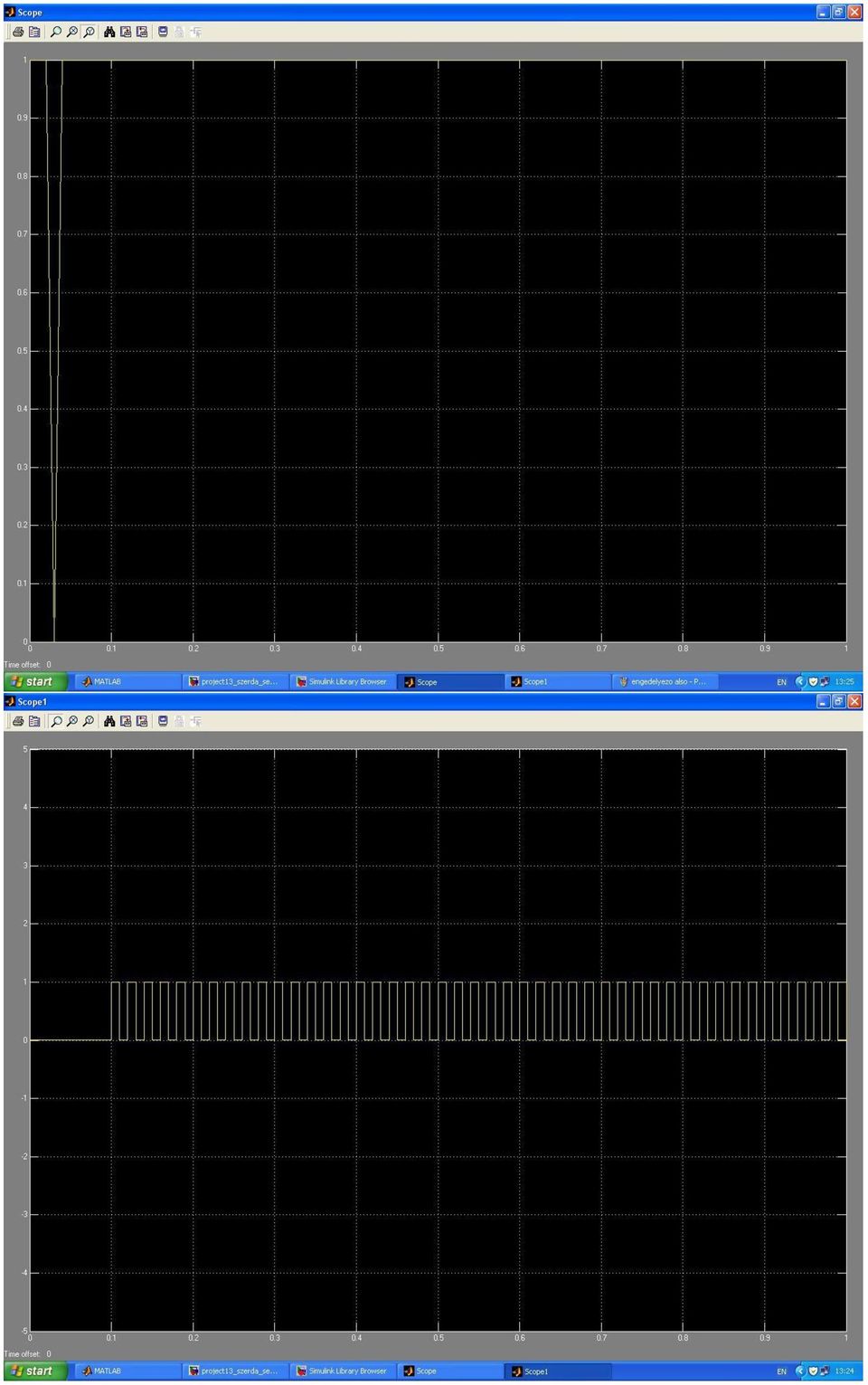
11 3. A szoftveres irányítás megvalósítása A rendszer az alábbi szoftver komponensekből áll: - Matlab Simulink grafikus fejlesztői környezetével o Simulinkben készítettük el az algoritmust - WinCon o WinCon nevű programmal érjük el a Quanser Q8-at valósidőben Szenzor értékek megjelenítése Vezérlőjelek kiadása 3.1. Programozás A programozás Simulink alatt történt. Ennek a hagyományos elemeit ismertük, a Quanser által biztosított kiegészítők használatát pedig a felhasználói kézikönyvéből sajátítottuk el. Első lépésben az érzékelő jeleit akartuk megjeleníteni. Miután a vezetékezés kész lett az új rendszerhez, ez különösebb nehézség nélkül sikerült. A Quanser elemivel egyszerűen hozzáférhetünk a szenzorokhoz, csak a megfelelő dobozt kell elhelyezni és a paraméterének beírni, melyik I/O egységre van kötve. Az értékeket át kellett váltanunk SI mértékegységekre. Ez a legtöbb esetben egyszerű osztással történt, az arányossági tényezőt az adatlapról néztük. A sebességnél viszont több időpontban kellett mintavételeznünk a pozíciót, amikből pillanatnyi sebességet, azokból pedig átlagolással viszonylag zajmentes értéket kaptunk. Ezután következet az engedélyező jel előállítása. Az adatlapon található impulzust és négyszögjelet a megfelelő időzítési értékekkel, Dout1 és Dout2 digitális kimenetre kapcsolva már a mi programunk vezérelte a darut. 10

12 Feszültség szabályzás A legfontosabb lépés a maximális feszültség jel előállítása, amivel még biztonságosan mozog. Apró lépésenként állítva mi a +4 és -3,5V közötti intervallumot határoztuk meg. Ez a maximális ±10Vhoz képest jóval kisebb, érezzük, hogy a biztonsági szaturációt elhagyva veszélyes lenne a programunk az eszközre és a laborban tartózkodókra nézve egyaránt. Ezt a limitet minden esetben megtartottuk, nem kísérleteztünk nagyobb jellel. Az egyik irányba a daru nehezebben mozog, ezért van az aszimmetrikus tartomány. Feszültség szabályzás Erő [N] idő [10*ms] Pozíció [m] idő [10*ms] Sebesség [m/s] idő [10*ms] Kötél kitérése [rad] idő [10*ms] 11

13 Pozíció szabályzás Az eredményekkel együtt megkaptuk a legegyszerűbb szabályzónkat, a feszültség alapút. Következő lépésnek kicsit izgalmasabb és látványosabb feladatot tűztünk ki célul. Pozíció szabályzót szerettünk volna megvalósítani, ami egy egyszerű P szabályzóval sikerült is. A következőképpen működik. Az aktuális és az általunk elérni kívánt pozíciót figyelembe véve egy hiba jel áll elő, amit a megfelelő mértékben erősítve elindul a daru és addig mozog, amíg a hiba nulla nem lesz, tehát eléri a célját. Az erősítési értéket kísérletezéssel állítottuk be, amit biztonságosan megtehettünk a limitáló miatt. Ezzel a módszerrel körülbelül 4 centiméterenként lehet lépkedni. Ennél nagyobb pontosságot csak a szabályzó lassításával tudtunk volna elérni, mert a daru a tehetetlensége miatt mindig kicsit túllendül a pontos értéken, és ha nem hagyunk neki egy megfelelően nagy beállási tartományt, akkor egy pont körül elkezd rezegni. Pozíció szabályzás Erő [N] idő [10*ms] Pozíció [m] idő [10*ms] Sebesség [m/s] idő [10*ms] Kötél kitérése [rad] idő [10*ms] 12

14 Sebesség szabályzás Az utolsó implementált algoritmusunk egy PI szabályzó, amellyel a sebességet tudjuk előírni. A sín közepén nagyobb a súrlódás mint a szélén, ezért kissé pontatlanul működik, viszont ez a programnak a legösszetettebb része, így igen sokat tanultunk belőle. Sebesség szabályzás Erő [N] idő [10*ms] Pozíció [m] idő [10*ms] Sebesség [m/s] idő [10*ms] Kötél kitérése [rad] idő [10*ms] 13

15 3.2. Simulink Program: Vezérlés engedélyezése - A számítógépről történő vezérléshez az alábbi jeleket kell kiküldeni a digitális porton 14

16 15
17 Érzékelők - Vízszintes pocizó o Az adatlapi adatok között megtalálható, hogy mennyi inkremens van métereként, ezért egy egyszerű szorzóval méterré tudjuk váltani o Koordinátatengely origója bal oldalt, jobbra nő o mértékegység: méter - kötél kilengésének szöge a vízszinteshez képest o Az adatlapi adatok között megtalálható, hogy mennyi inkremens van összesen, ezért egy egyszerű szorzóval radiánná tudjuk váltani o függőleges helyzetben -> 0 rad - Vízszintes erő o Adatlapból számolható, hogy a bemenő feszültséghez képest mekkora erőt ad ki a motor o lineáris kapcsolat o mértékegység: Newton - Vízszintes sebességmérő o A mintavételezési idő (10 ms) ötszőrösénél (subsystemben öt delay) mintavételezzük a pozíciót, így megkapjuk az út különbséget, amit 50 ms-mal osztva a sebességet adja o Ezt négyszer végezzük egymás után, amiket átlagolunk, hogy kisebb legyen a zaj o 0,2 másodperces késést visz a mérésbe o mértékegység: m/s - Kötélhelyzet o Nem implementáltuk <- rossz a szenzor Vezérlés - Feszültséggel o legegyszerűbb o -1-es szorzó, hogy az irányok egyezzenek a koordinátarendszerünkkel o Korlátozva +-4V-nál biztonsági okokból - Pozíció 16
 ötszőrösénél (subsystemben öt delay) mintavételezzük a pozíciót, így megkapjuk az út különbséget, amit 50 ms-mal osztva")
18 o P szabályzó o 0,04 méterenként lépked o Csúszka reprezentálja a sínt o Maximális beavatkozó jel korlátozva +-4V-nál biztonsági okokból - Sebesség o PI szabályzó o A sínen nem egyenletes a súrlódás -> nem pontos o Maximális sebesség korlátozva +-0,8 m/s-nál biztonsági okokból - Kötélhossza o Nem implementáltuk <- nem tudjuk szabályozni <- rossz a szenzor 3.3. WinCon A WinCon egy egyszerű kezelőfelületet biztosító szoftver, kevés beállítási lehetőséggel. Két részre lehet osztani a működését. Az egyik a szenzorok és bármilyen más kimeneti érték megjelenítése Scope-on vagy Multiméteren. Scope esetén lehetőség van az értékek exportálására Matlab-ba. Ennek segítségével a szabályzóinkat tesztelhettük illetve a paramétereik változtatásával pontosítottuk azokat. A program másik feladata a bementek vezérlése. Itt is gyakorlatilag bármelyik változó értékét módosíthatjuk valós időben. Az értékek megadására nincs túl sok lehetőség, a gui elég puritán, de a célnak megfelel. Mi csak vízszintes csúszkákat használtunk, de ezen kívül lehetőség van még függőleges csúszkára, potméterre vagy közvetlen érték bevitelre text mezőn keresztül. Először a három szabályzót közös felületen próbáltuk megvalósítani. Simulinkbe tettünk kapcsolókat, amit WinCon alatt kapcsolgathattunk. A megoldás működött, de néhány helyzetben túl nagy erőt fejtett ki a motor, ezért biztonsági okokból szétbontottuk három részre. Ez abból a szempontból is előnyösebb, hogy nem kellett minden apró Simulink változtatás után újra elkészítenünk a gui egészét, csak a szabályzónkra vonatkozó részt. 17

19 Kezelőfelületek - Közös - Feszültség - Pozíció - Sebesség 18

20 4. Egyéb próbálkozások, és lehetőségek a jövőre nézve 4.1. Irányítás gamepad segítségével A félév során megpróbálkoztunk azzal, hogy lehetővé tegyük a daru irányítását gamepad segítségével. Az elképzelés nem valósult meg, mert több szinten akadályba ütköztünk. A Quanser Q8-nak nincs olyan bemenete, amelyen képes lenne ilyen eszköz jeleit fogadni. A Simulinkben van olyan blokk, amely képes érzékelni a gamepad jeleit, ha az be van dugva a számítógép egyik USB portjába. Ez azonban csak szimulációban képes futni, real time alkalmazásként nem fordítható le a Quanser eszközre. Így az a megoldás maradna, hogy a gamepad jeleit valamilyen módon analóg jelekké alakítjuk, és ezt a Quanser analóg bemeneteibe vezetjük. Első gondolatunk az volt, hogy a PC hangkártya-kimenetére generálunk a gamepad-ből érkező jellel arányos jelet. Labview fejlesztői környezetben készítettünk egy VI-t, amely erre képes volt, azonban a megoldást mégis elvetettük, mert nem éri meg ekkora plusz erőforrásigény ráfordítása. Hiszen így még egy Labview-t is futtatni kellene a meglévő rendszerünk mellett, és így is csak egy jelet tudunk kiadni a hangkártya kimenetére. A daru értelmes irányításához több jel kell. A gamepad-es irányítás lehetőségét nem vetettük el teljesen. Megoldást jelenthet akár egy áramkör készítése, amely a gamepad jeleit feldolgozza, és megfelelő formában tovább vezeti azt. Ehhez azonban alaposabban bele kellene ásni magunkat a gamepad működésébe. Mivel ez nem kapcsolódott szorosan a mi témánkhoz, nem kezdtünk el ennyire részletesen foglalkozni vele. A téma az utókor számára nyitva áll. 19

21 4.2. Egyéb lehetőségek A kötél hosszát mérő szenzorunk nem működött, és nem is tudtuk semmi mással pótolni azt, így erre nem tudtunk szabályozást megvalósítani. Nagy reményeket táplálunk, hogy a jövőben kaphatunk egy új szenzort, amely lehetővé teszi, hogy munkánknak ezt a részét is elvégezzük. Reményeink szerint a real-time alkalmazásunkat futtató szoftverkörnyezetet is modernebbre tudjuk majd cserélni, és az új szoftverrel sokkal több lehetőség nyílik meg előttünk: akár még a gamepad egyszerű csatlakoztatását is lehetővé teheti. Az eddig érintetlen feladatok között van még a lézerkapuk jeleinek feldolgozása, és a kötél kilengési szögének szabályozása. Utóbbival az MSc-s kollégák foglalkoznak, de mi is örömmel nyújtunk hozzá támogatást, ha tudunk. Ezen kívül ne feledjük el, hogy témánk eredeti célja a darukezelő személyzet ergonómiai szempontjainak figyelembe vétele, munkájának könnyítése volt. Ez a félév során nem valósult meg, de bízunk benne, hogy később ezen a téren is sikerül majd haladást elérni. 20
FEDÉLZETI INERCIÁLIS ADATGYŰJTŐ RENDSZER ALKALMAZÁSA PILÓTA NÉLKÜLI REPÜLŐGÉPEKBEN BEVEZETÉS
 Koncz Miklós Tamás FEDÉLZETI INERCIÁLIS ADATGYŰJTŐ RENDSZER ALKALMAZÁSA PILÓTA NÉLKÜLI REPÜLŐGÉPEKBEN BEVEZETÉS Magyarországon megszűnt a nagyoroszi (Drégelypalánk) lőtér, a térségben található egyetlen,
Koncz Miklós Tamás FEDÉLZETI INERCIÁLIS ADATGYŰJTŐ RENDSZER ALKALMAZÁSA PILÓTA NÉLKÜLI REPÜLŐGÉPEKBEN BEVEZETÉS Magyarországon megszűnt a nagyoroszi (Drégelypalánk) lőtér, a térségben található egyetlen,
FIR és IIR szűrők tervezése digitális jelfeldolgozás területén
 Dr. Szabó Anita FIR és IIR szűrők tervezése digitális jelfeldolgozás területén A Szabadkai Műszaki Szakfőiskola oktatójaként kutatásaimat a digitális jelfeldolgozás területén folytatom, ezen belül a fő
Dr. Szabó Anita FIR és IIR szűrők tervezése digitális jelfeldolgozás területén A Szabadkai Műszaki Szakfőiskola oktatójaként kutatásaimat a digitális jelfeldolgozás területén folytatom, ezen belül a fő
Konfigurálható digitális műszerfal Bosch MonoMotronic befecskendezőrendszerhez
 BMEVIFO4319 Önálló laboratórium Konfigurálható digitális műszerfal Bosch MonoMotronic befecskendezőrendszerhez Időközi beszámoló Molnár Bence ILUAUQ Konzulens: Kertész Zsolt Bevezető A járműelektronika
BMEVIFO4319 Önálló laboratórium Konfigurálható digitális műszerfal Bosch MonoMotronic befecskendezőrendszerhez Időközi beszámoló Molnár Bence ILUAUQ Konzulens: Kertész Zsolt Bevezető A járműelektronika
0934-06. ProxerBoard System. Termékismertető
 0934-06 ProxerBoard System Termékismertető ProxerBoard fedélzeti terminálok Proxer20 RFID olvasók betöltő pisztoly, és betöltő ajtó azonosítására ProxerPorta rádiós bázis-terminál Ver.2.1. 2014.11.28.
0934-06 ProxerBoard System Termékismertető ProxerBoard fedélzeti terminálok Proxer20 RFID olvasók betöltő pisztoly, és betöltő ajtó azonosítására ProxerPorta rádiós bázis-terminál Ver.2.1. 2014.11.28.
Mach3 tananyag. Egyszerű háromtengelyű marógép beállítása. A Mach3 2.5 szoftver alapján
 Mach3 tananyag Egyszerű háromtengelyű marógép beállítása A Mach3 2.5 szoftver alapján Cél A tananyag célja a felhasználó segítése és irányítása lépésről lépésre a Mach3 CNC vezérlő alkalmazás beállításában
Mach3 tananyag Egyszerű háromtengelyű marógép beállítása A Mach3 2.5 szoftver alapján Cél A tananyag célja a felhasználó segítése és irányítása lépésről lépésre a Mach3 CNC vezérlő alkalmazás beállításában
Vektorugrás védelmi funkció blokk
 Vektorugrás védelmi funkció blokk Dokumentum azonosító: PP-13-21101 Budapest, 2015. augusztus A leírás verzió-információja Verzió Dátum Változás Szerkesztette Verzió 1.0 07.03.2012. First edition Petri
Vektorugrás védelmi funkció blokk Dokumentum azonosító: PP-13-21101 Budapest, 2015. augusztus A leírás verzió-információja Verzió Dátum Változás Szerkesztette Verzió 1.0 07.03.2012. First edition Petri
Profi2A Axis Driver (telepítés)
") Profi2A Axis Driver (telepítés) V1.0 Mechanikai kialakítás és elhelyezés: PCB: - Kétoldalas, lyukgalvanizált nyáklemez, részben SMD szereléssel, - Méretei: 170mm 90mm, magasság igény min. 50mm (légmozgatással),
Profi2A Axis Driver (telepítés) V1.0 Mechanikai kialakítás és elhelyezés: PCB: - Kétoldalas, lyukgalvanizált nyáklemez, részben SMD szereléssel, - Méretei: 170mm 90mm, magasság igény min. 50mm (légmozgatással),
NCT 101, 104, 115 szerszámgép vezérlések Telepítési leírása A.066 (M) (L) kiadási számú szoftver változattól
 (L) kiadási számú szoftver változattól") NCT 101, 104, 115 szerszámgép vezérlések Telepítési leírása A.066 (M) (L) kiadási számú szoftver változattól 2 Gyártó és fejlesztõ: NCT Ipari Elektronikai kft. H1148 Budapest Fogarasi út 7 Postafiók: 1631
NCT 101, 104, 115 szerszámgép vezérlések Telepítési leírása A.066 (M) (L) kiadási számú szoftver változattól 2 Gyártó és fejlesztõ: NCT Ipari Elektronikai kft. H1148 Budapest Fogarasi út 7 Postafiók: 1631
A G320 SERVOMOTOR MEGHAJTÓ ÜZEMBE HELYEZÉSE (2002. március 29.)
") A G320 SERVOMOTOR MEGHAJTÓ ÜZEMBE HELYEZÉSE (2002. március 29.) Köszönjük, hogy a G320 szervomotor meghajtót választotta. A G320 DC szervomotor meghajtóra a vásárlástól számítva 1 év gyártási hibákra kiterjedő
A G320 SERVOMOTOR MEGHAJTÓ ÜZEMBE HELYEZÉSE (2002. március 29.) Köszönjük, hogy a G320 szervomotor meghajtót választotta. A G320 DC szervomotor meghajtóra a vásárlástól számítva 1 év gyártási hibákra kiterjedő
AGV rendszer fejlesztése
 Budapesti Műszaki és Gazdaságtudományi Egyetem Villamosmérnöki és Informatikai Kar Irányítástechnika és Informatika Tanszék Szabó Lőrinc E8I9IC Szabó Oszkár Albert - UBHPZC AGV rendszer fejlesztése Önálló
Budapesti Műszaki és Gazdaságtudományi Egyetem Villamosmérnöki és Informatikai Kar Irányítástechnika és Informatika Tanszék Szabó Lőrinc E8I9IC Szabó Oszkár Albert - UBHPZC AGV rendszer fejlesztése Önálló
S7021 ADATGYŰJTŐ. 2-csatornás adatgyűjtő számláló és bináris bemenettel. Kezelési leírás
 S7021 ADATGYŰJTŐ 2-csatornás adatgyűjtő számláló és bináris bemenettel Kezelési leírás Nem hivatalos fordítás! Minden esetleges eltérés esetén az eredeti, angol nyelvű dokumentum szövege tekintendő irányadónak:
S7021 ADATGYŰJTŐ 2-csatornás adatgyűjtő számláló és bináris bemenettel Kezelési leírás Nem hivatalos fordítás! Minden esetleges eltérés esetén az eredeti, angol nyelvű dokumentum szövege tekintendő irányadónak:
LPT illesztőkártya. Beüzemelési útmutató
 LPT illesztőkártya Beüzemelési útmutató Az LPT illesztőkártya a számítógépen futó mozgásvezérlő program ki- és bemenőjeleit illeszti a CNC gép és a PC nyomtató (LPT) csatlakozója között. Főbb jellemzők:
LPT illesztőkártya Beüzemelési útmutató Az LPT illesztőkártya a számítógépen futó mozgásvezérlő program ki- és bemenőjeleit illeszti a CNC gép és a PC nyomtató (LPT) csatlakozója között. Főbb jellemzők:
Villamos jelek mintavételezése, feldolgozása. Mérésadatgyűjtés, jelfeldolgozás 9. előadás
 Villamos jelek mintavételezése, feldolgozása (ellenállás mérés LabVIEW támogatással) Számítógépes mérőrendszerek Mérésadatgyűjtés, jelfeldolgozás 9. előadás Dr. Iványi Miklósné, egyetemi tanár Schiffer
Villamos jelek mintavételezése, feldolgozása (ellenállás mérés LabVIEW támogatással) Számítógépes mérőrendszerek Mérésadatgyűjtés, jelfeldolgozás 9. előadás Dr. Iványi Miklósné, egyetemi tanár Schiffer
HELYSZÍN: RAMADA RESORT AQUAWORLD BUDAPEST IDÔPONT: 2011. OKTÓBER 27. REGISZTRÁCIÓ: HUNGARY.NI.COM/NIDAYS
 ÜZLET > [PRESSZÓ] A BOSCH TÖRTÉNETÉNEK SAROKPONTJAI 1886, Stuttgart a cég megalakul, finommechanikai és elektrotechnikai profillal I 1902 szinte az elsô gyártmányuk a nagyfeszültségû, mágneses gyújtási
ÜZLET > [PRESSZÓ] A BOSCH TÖRTÉNETÉNEK SAROKPONTJAI 1886, Stuttgart a cég megalakul, finommechanikai és elektrotechnikai profillal I 1902 szinte az elsô gyártmányuk a nagyfeszültségû, mágneses gyújtási
Moduláris elektronikai eszközök a gyakorlatban. Írta: Zabari István 2009. október 01. csütörtök, 14:33
 Most induló cikksorozatunkban szeretnénk, gyakorlati oldalról bemutatni a ma már a legtöbb gyártó kínálatában szereplő moduláris elektronikai eszközöket, az egyszerű alkonykapcsolóktól a fényerőszabályzókon
Most induló cikksorozatunkban szeretnénk, gyakorlati oldalról bemutatni a ma már a legtöbb gyártó kínálatában szereplő moduláris elektronikai eszközöket, az egyszerű alkonykapcsolóktól a fényerőszabályzókon
Felhasználói kézikönyv. TB6560HQV3-T3 (V type) 3 tengelyes léptetőmotor vezérlő
 3 tengelyes léptetőmotor vezérlő") Felhasználói kézikönyv TB6560HQV3-T3 (V type) 3 tengelyes léptetőmotor vezérlő Mikrolépés lehetősége: 1, 1/2, 1/8, 1/16. A vezérlő 3 tengely meghajtására képes, egyszerűen bővíthető a rendszer egy 4. tengellyel.
Felhasználói kézikönyv TB6560HQV3-T3 (V type) 3 tengelyes léptetőmotor vezérlő Mikrolépés lehetősége: 1, 1/2, 1/8, 1/16. A vezérlő 3 tengely meghajtására képes, egyszerűen bővíthető a rendszer egy 4. tengellyel.
R2T2. Műszaki leírás 1.0. Készítette: Forrai Attila. Jóváhagyta: Rubin Informatikai Zrt.
 R2T2 Műszaki leírás 1.0 Készítette: Forrai Attila Jóváhagyta: Rubin Informatikai Zrt. 1149 Budapest, Egressy út 17-21. telefon: +361 469 4020; fax: +361 469 4029 e-mail: info@rubin.hu; web: www.rubin.hu
R2T2 Műszaki leírás 1.0 Készítette: Forrai Attila Jóváhagyta: Rubin Informatikai Zrt. 1149 Budapest, Egressy út 17-21. telefon: +361 469 4020; fax: +361 469 4029 e-mail: info@rubin.hu; web: www.rubin.hu
Telepítési kézikönyv. EuroDome 2.0
 Telepítési kézikönyv EuroDome 2.0 1 Az EuroDome 2.0 bekapcsolása előtt ellenőrizze, hogy az EuroDome 2.0 Ugyanolyan hálózati feszültsélget igényel, mint a helyi áramhálózat feszültsége. A EuroDome 2.0
Telepítési kézikönyv EuroDome 2.0 1 Az EuroDome 2.0 bekapcsolása előtt ellenőrizze, hogy az EuroDome 2.0 Ugyanolyan hálózati feszültsélget igényel, mint a helyi áramhálózat feszültsége. A EuroDome 2.0
DREHMO i-matic elektromechanikus hajtások
 DREHMO i-matic elektromechanikus hajtások KÉNYELEM ÉS BIZTONSÁG A legújabb fejlesztési irányelvek lényege az, hogy a hajtóműveket az elektronika szétszerelése nélkül be lehessen állítani. Ezeket a törekvéseket
DREHMO i-matic elektromechanikus hajtások KÉNYELEM ÉS BIZTONSÁG A legújabb fejlesztési irányelvek lényege az, hogy a hajtóműveket az elektronika szétszerelése nélkül be lehessen állítani. Ezeket a törekvéseket
Robotkocsi mikrovezérlővel
 B é k é s c s a b a i K ö z p o n t i S z a k k é p z ő I s k o l a é s K o l l é g i u m Trefort Ágoston Műszaki Tagiskolája 5600 Békéscsaba, Puskin tér 1. Pf. 62 www.taszi.hu XVII. ORSZÁGOS ELEKTRONIKAI
B é k é s c s a b a i K ö z p o n t i S z a k k é p z ő I s k o l a é s K o l l é g i u m Trefort Ágoston Műszaki Tagiskolája 5600 Békéscsaba, Puskin tér 1. Pf. 62 www.taszi.hu XVII. ORSZÁGOS ELEKTRONIKAI
Whead 3.0. Szélsebesség és széliránymérő illesztő távadó. Előzetes
 Whead 3.0 Szélsebesség és széliránymérő illesztő távadó Előzetes UNITEK 2006-2013 Whead Szélsebesség és széliránymérő illesztő távadó 2 Unitek Whead Szélsebesség és széliránymérő távadó Általános leírás
Whead 3.0 Szélsebesség és széliránymérő illesztő távadó Előzetes UNITEK 2006-2013 Whead Szélsebesség és széliránymérő illesztő távadó 2 Unitek Whead Szélsebesség és széliránymérő távadó Általános leírás
Tartalomjegyzék Informatikai berendezések újrahasznosítására vonatkozó információk Biztonság Fontos tudnivalók az
 Tartalomjegyzék Informatikai berendezések újrahasznosítására vonatkozó információk 1 Biztonság 1 Elektromos biztonság 1 Biztonság az üzembe helyezésnél 1 Biztonság tisztítás közben 1 Fontos tudnivalók
Tartalomjegyzék Informatikai berendezések újrahasznosítására vonatkozó információk 1 Biztonság 1 Elektromos biztonság 1 Biztonság az üzembe helyezésnél 1 Biztonság tisztítás közben 1 Fontos tudnivalók
Hardver leírás Klasszikus kontroller v.3.2.2
 StP Beléptető Rendszer Hardver leírás Klasszikus kontroller v.3.2.2 s TARTALOMJEGYZÉK 1. ALKÖZPONTOK KÖZÖTTI KOMMUNIKÁCIÓ (INTERNET)... 3 2. RS485... 3 3. OLVASÓ- ÉS KÁRTYATÍPUSOK, OLVASÓ KEZELÉS, EGY
StP Beléptető Rendszer Hardver leírás Klasszikus kontroller v.3.2.2 s TARTALOMJEGYZÉK 1. ALKÖZPONTOK KÖZÖTTI KOMMUNIKÁCIÓ (INTERNET)... 3 2. RS485... 3 3. OLVASÓ- ÉS KÁRTYATÍPUSOK, OLVASÓ KEZELÉS, EGY
BEACon TM. Verzió 2.0
 BEACon TM Verzió 2.0 A Suprema Inc., a BioEntry TM és a BEACon TM a Suprema Inc. regisztrált márkanevei. Minden jog fenntartva. Ennek a munkának semmilyen részét, ami ezek a márkanevek alatt fut nem lehet
BEACon TM Verzió 2.0 A Suprema Inc., a BioEntry TM és a BEACon TM a Suprema Inc. regisztrált márkanevei. Minden jog fenntartva. Ennek a munkának semmilyen részét, ami ezek a márkanevek alatt fut nem lehet
Robotot vezérlő szoftverek fejlesztése Developing robot controller softwares
 Robotot vezérlő szoftverek fejlesztése Developing robot controller softwares VARGA Máté 1, PÓGÁR István 2, VÉGH János 1 Programtervező informatikus BSc szakos hallgató 2 Programtervező informatikus MSc
Robotot vezérlő szoftverek fejlesztése Developing robot controller softwares VARGA Máté 1, PÓGÁR István 2, VÉGH János 1 Programtervező informatikus BSc szakos hallgató 2 Programtervező informatikus MSc
Elektronikus vízmérı FLYPPER 4
 A MŐKÖDÉS LEÍRÁSA Egy lapátkerék forgó mozgása viszi át egy modulátor tárcsával a FLYPPER elektronikus számláló modul szenzor-rendszerébe. Egy beépített mikroprocesszor értékeli a létrehozott szenzor jeleket
A MŐKÖDÉS LEÍRÁSA Egy lapátkerék forgó mozgása viszi át egy modulátor tárcsával a FLYPPER elektronikus számláló modul szenzor-rendszerébe. Egy beépített mikroprocesszor értékeli a létrehozott szenzor jeleket
TEE - Adásvételi szerződés keretében informatikai kutatási eszközök és szoftverek beszerzése a Pázmány Péter Katolikus Egyetem számára
 TEE - Adásvételi szerződés keretében informatikai kutatási eszközök és szoftverek beszerzése a Pázmány Péter Katolikus Egyetem számára Közbeszerzési Értesítő száma: 2015/146 Beszerzés tárgya: Árubeszerzés
TEE - Adásvételi szerződés keretében informatikai kutatási eszközök és szoftverek beszerzése a Pázmány Péter Katolikus Egyetem számára Közbeszerzési Értesítő száma: 2015/146 Beszerzés tárgya: Árubeszerzés
Tervezői segédlet. Vezérlő egység
 Tervezői segédlet Vezérlő egység Vezérlő egység (CPIC-01) tervezői segédlet A segédlet célja, ismertetni a vezérlő egység (CPIC-01) BiiOS rendszerben való alkalmazásának funkcionális és műszaki követelményeit,
Tervezői segédlet Vezérlő egység Vezérlő egység (CPIC-01) tervezői segédlet A segédlet célja, ismertetni a vezérlő egység (CPIC-01) BiiOS rendszerben való alkalmazásának funkcionális és műszaki követelményeit,
Zárójelentés. Az autonóm mobil eszközök felhasználási területei, irányítási módszerek
 Zárójelentés Az autonóm mobil eszközök felhasználási területei, irányítási módszerek Az autonóm mobil robotok elterjedése növekedést mutat napjainkban az egész hétköznapi felhasználástól kezdve az ember
Zárójelentés Az autonóm mobil eszközök felhasználási területei, irányítási módszerek Az autonóm mobil robotok elterjedése növekedést mutat napjainkban az egész hétköznapi felhasználástól kezdve az ember
T Ö R P E M O T O R O K
 VILLANYSZERELŐ KÉPZÉS 2 0 1 5 T Ö R P E M O T O R O K ÖSSZEÁLLÍTOTTA NAGY LÁSZLÓ MÉRNÖKTANÁR - 2 - Tartalomjegyzék Törpemotorok fogalma...3 Reluktancia motor...3 Árnyékolt pólusú motor...3 Szervomotorok...4
VILLANYSZERELŐ KÉPZÉS 2 0 1 5 T Ö R P E M O T O R O K ÖSSZEÁLLÍTOTTA NAGY LÁSZLÓ MÉRNÖKTANÁR - 2 - Tartalomjegyzék Törpemotorok fogalma...3 Reluktancia motor...3 Árnyékolt pólusú motor...3 Szervomotorok...4
Szerelési Útmutató FIGYELEM! ÁRAMÜTÉS VESZÉLYE!
 eco1 kapuvezérlő eco1 kapuvezérlő Szerelési Útmutató FIGYELEM! ÁRAMÜTÉS VESZÉLYE! Áramütés veszélye! A készülék szerelését, bekötését, beállítását kizárólag feszültség mentesített állapotban lehet végezni
eco1 kapuvezérlő eco1 kapuvezérlő Szerelési Útmutató FIGYELEM! ÁRAMÜTÉS VESZÉLYE! Áramütés veszélye! A készülék szerelését, bekötését, beállítását kizárólag feszültség mentesített állapotban lehet végezni
Xenta Szabadon programozható LonWorks alapú szabályozókészülék-család
 Xenta Szabadon programozható LonWorks alapú szabályozókészülék-család 27 TAC Xenta 280 Szabadon programozható, LonMark tanúsítvánnyal és kötött bemenetekkel és kimenetekkel rendelkezô szabályozó. A szabályozó
Xenta Szabadon programozható LonWorks alapú szabályozókészülék-család 27 TAC Xenta 280 Szabadon programozható, LonMark tanúsítvánnyal és kötött bemenetekkel és kimenetekkel rendelkezô szabályozó. A szabályozó
AUDIO ENGINEERING SOCIETY
 HUNGARIAN SECTION HÍREK MAGYAR TAGOZAT Szerkeszti: dr. Takács Ferenc, Titkár 36. szám. 2002. március 26. PRO TOOLS HD Mérföldk a Digidesign történetében A Digidesign története a nyolcvanas évek közepére
HUNGARIAN SECTION HÍREK MAGYAR TAGOZAT Szerkeszti: dr. Takács Ferenc, Titkár 36. szám. 2002. március 26. PRO TOOLS HD Mérföldk a Digidesign történetében A Digidesign története a nyolcvanas évek közepére
1 GCK800 Használati útmutató 2 GCK800 Használati útmutató Tájékoztató
 1 GCK800 Használati útmutató 2 GCK800 Használati útmutató Tájékoztató Örülünk, hogy a GCK 800 típusú Bluetooth készülékünket választotta, amely egy autós kihangosítót és egy headsetet foglal magában. Talán
1 GCK800 Használati útmutató 2 GCK800 Használati útmutató Tájékoztató Örülünk, hogy a GCK 800 típusú Bluetooth készülékünket választotta, amely egy autós kihangosítót és egy headsetet foglal magában. Talán
TSZA-04/V. Rendszerismertető: Teljesítmény szabályzó automatika / vill
 TSZA-04/V Teljesítmény szabályzó automatika / vill Rendszerismertető: 1. A TSZA-04/V működése...2 2. A TSZA-04/V üzemi paramétereinek jelentése...4 3. A TSZA-04/V programozható paramétereinek jelentése...5
TSZA-04/V Teljesítmény szabályzó automatika / vill Rendszerismertető: 1. A TSZA-04/V működése...2 2. A TSZA-04/V üzemi paramétereinek jelentése...4 3. A TSZA-04/V programozható paramétereinek jelentése...5
Mérési útmutató. Széchenyi István Egyetem Távközlési Tanszék. SDR rendszer vizsgálata. Labor gyakorlat 1 (NGB_TA009_1) laboratóriumi gyakorlathoz
 laboratóriumi gyakorlathoz") Széchenyi István Egyetem Távközlési Tanszék Mérési útmutató Labor gyakorlat 1 (NGB_TA009_1) laboratóriumi gyakorlathoz SDR rendszer vizsgálata Készítette: Budai Tamás BSc hallgató, Unger Tamás István BSc
Széchenyi István Egyetem Távközlési Tanszék Mérési útmutató Labor gyakorlat 1 (NGB_TA009_1) laboratóriumi gyakorlathoz SDR rendszer vizsgálata Készítette: Budai Tamás BSc hallgató, Unger Tamás István BSc
Door-System Kft Újpest IPARI PARK Almakerék u. 4. T : 30-399-0740 2300-183 www.door-system.hu info@door-system.hu
 Nem jeleníthető meg a kép. Lehet, hogy nincs elegendő memória a megnyitásához, de az sem kizárt, hogy sérült a kép. Indítsa újra a számítógépet, és nyissa meg újból a fájlt. Ha továbbra is a piros x ikon
Nem jeleníthető meg a kép. Lehet, hogy nincs elegendő memória a megnyitásához, de az sem kizárt, hogy sérült a kép. Indítsa újra a számítógépet, és nyissa meg újból a fájlt. Ha továbbra is a piros x ikon
Mérési útmutató. A/D konverteres mérés. // Első lépésként tanulmányozzuk a digitális jelfeldolgozás előnyeit és határait.
 Mérési útmutató A/D konverteres mérés 1. Az A/D átalakítók főbb típusai és rövid leírásuk // Első lépésként tanulmányozzuk a digitális jelfeldolgozás előnyeit és határait. Csoportosítás polaritás szempontjából:
Mérési útmutató A/D konverteres mérés 1. Az A/D átalakítók főbb típusai és rövid leírásuk // Első lépésként tanulmányozzuk a digitális jelfeldolgozás előnyeit és határait. Csoportosítás polaritás szempontjából:
VHR-23 Regisztráló műszer Felhasználói leírás
 VHR-23 Regisztráló műszer Felhasználói leírás TARTALOMJEGYZÉK 1. ÁLTALÁNOS LEÍRÁS... 3 1.1. FELHASZNÁLÁSI TERÜLET... 3 1.2. MÉRT JELLEMZŐK... 3 1.3. BEMENETEK... 4 1.4. TÁPELLÁTÁS... 4 1.5. PROGRAMOZÁS,
VHR-23 Regisztráló műszer Felhasználói leírás TARTALOMJEGYZÉK 1. ÁLTALÁNOS LEÍRÁS... 3 1.1. FELHASZNÁLÁSI TERÜLET... 3 1.2. MÉRT JELLEMZŐK... 3 1.3. BEMENETEK... 4 1.4. TÁPELLÁTÁS... 4 1.5. PROGRAMOZÁS,
A Közbeszerzési Döntőbizottság (a továbbiakban: Döntőbizottság) a Közbeszerzések Tanácsa nevében meghozta az alábbi. HATÁROZAT - ot.
 a Közbeszerzések Tanácsa nevében meghozta az alábbi. HATÁROZAT - ot.") KÖZBESZERZÉSEK TANÁCSA KÖZBESZERZÉSI DÖNTŐBIZOTTSÁG 1024 Budapest, Margit krt. 85. 1525 Pf.: 166. Tel.: 06-1/336-7776, fax: 06-1/336-7778 E-mail: dontobizottsag@kt.hu Ikt.sz.: D.151/17/2011. A Közbeszerzési
KÖZBESZERZÉSEK TANÁCSA KÖZBESZERZÉSI DÖNTŐBIZOTTSÁG 1024 Budapest, Margit krt. 85. 1525 Pf.: 166. Tel.: 06-1/336-7776, fax: 06-1/336-7778 E-mail: dontobizottsag@kt.hu Ikt.sz.: D.151/17/2011. A Közbeszerzési
9. Áramlástechnikai gépek üzemtana
 9. Áramlástechnikai gépek üzemtana Az üzemtan az alábbi fejezetekre tagozódik: 1. Munkapont, munkapont stabilitása 2. Szivattyú indítása soros 3. Stacionárius üzem kapcsolás párhuzamos 4. Szivattyú üzem
9. Áramlástechnikai gépek üzemtana Az üzemtan az alábbi fejezetekre tagozódik: 1. Munkapont, munkapont stabilitása 2. Szivattyú indítása soros 3. Stacionárius üzem kapcsolás párhuzamos 4. Szivattyú üzem
Iránymérés adaptív antennarendszerrel
 Iránymérés adaptív antennarendszerrel NÉMETH ANDRÁS ZMNE-BJKMFK, Katonai Távközlési és Telematikai Tanszék, anemeth@bjkmf.hu FOLKMANN VIKTOR Bonn Hungary Electronics Kft. folkmannv@freemail.hu Kulcsszavak:
Iránymérés adaptív antennarendszerrel NÉMETH ANDRÁS ZMNE-BJKMFK, Katonai Távközlési és Telematikai Tanszék, anemeth@bjkmf.hu FOLKMANN VIKTOR Bonn Hungary Electronics Kft. folkmannv@freemail.hu Kulcsszavak:
DREHMO Matic C elektromechanikus hajtások
 DREHMO Matic C elektromechanikus hajtások ALKALMAZÁS A többfordulatú hajtóművek tervezési elve az, hogy a kimeneti kihajtó tengelyek 360 -os fordulatot tegyenek. A DREHMO többfordulatú hajtóműveket 2-1450
DREHMO Matic C elektromechanikus hajtások ALKALMAZÁS A többfordulatú hajtóművek tervezési elve az, hogy a kimeneti kihajtó tengelyek 360 -os fordulatot tegyenek. A DREHMO többfordulatú hajtóműveket 2-1450
Miskolci Egyetem Gépészmérnöki és Informatikai Kar Villamosmérnöki Intézet Elektrotehnikai - Elektronikai Intézeti Tanszék
 Miskolci Egyetem Gépészmérnöki és Informatikai Kar Villamosmérnöki Intézet Elektrotehnikai - Elektronikai Intézeti Tanszék 5/1. melléklet Villamosmérnöki szak Elektronikai tervezés szakirány Belsőégésű
Miskolci Egyetem Gépészmérnöki és Informatikai Kar Villamosmérnöki Intézet Elektrotehnikai - Elektronikai Intézeti Tanszék 5/1. melléklet Villamosmérnöki szak Elektronikai tervezés szakirány Belsőégésű
Hidraulika. 5. előadás
 Hidraulika 5. előadás Automatizálás technika alapjai Hidraulika I. előadás Farkas Zsolt BME GT3 2014 1 Hidraulikus energiaátvitel 1. Előnyök kisméretű elemek alkalmazásával nagy erők átvitele, azaz a teljesítménysűrűség
Hidraulika 5. előadás Automatizálás technika alapjai Hidraulika I. előadás Farkas Zsolt BME GT3 2014 1 Hidraulikus energiaátvitel 1. Előnyök kisméretű elemek alkalmazásával nagy erők átvitele, azaz a teljesítménysűrűség
Budapesti Műszaki és Gazdaságtudományi Egyetem Villamosmérnöki és Informatikai Kar Irányítástechnika és Informatika Tanszék. Önálló laboratórium
 Budapesti Műszaki és Gazdaságtudományi Egyetem Villamosmérnöki és Informatikai Kar Irányítástechnika és Informatika Tanszék Önálló laboratórium (BMEVIIIA355) Téma: Eaton-Moeller PLC-k alkalmazástechnikája
Budapesti Műszaki és Gazdaságtudományi Egyetem Villamosmérnöki és Informatikai Kar Irányítástechnika és Informatika Tanszék Önálló laboratórium (BMEVIIIA355) Téma: Eaton-Moeller PLC-k alkalmazástechnikája
XXI. Országos Ajtonyi István Irányítástechnikai Programozó Verseny
 evopro systems engineering kft. H-1116 Budapest, Hauszmann A. u. 2. XXI. Országos Ajtonyi István Dokumentum státusza Közétett Dokumentum verziószáma v1.0 Felelős személy Kocsi Tamás / Tarr László Jóváhagyta
evopro systems engineering kft. H-1116 Budapest, Hauszmann A. u. 2. XXI. Országos Ajtonyi István Dokumentum státusza Közétett Dokumentum verziószáma v1.0 Felelős személy Kocsi Tamás / Tarr László Jóváhagyta
Figyelmeztetés: Az alábbi merevlemez-meghajtók telepítése nem ajánlott ebbe a készülékbe:
 Figyelmeztetés: Amennyiben egy új merevlemez-meghajtót szeretne telepíteni ebbe a készülékbe, úgy vegye figyelembe a tesztelt, kompatibilis merevlemez-meghajtók jegyzékét az alábbiak szerint: Figyelmeztetés:
Figyelmeztetés: Amennyiben egy új merevlemez-meghajtót szeretne telepíteni ebbe a készülékbe, úgy vegye figyelembe a tesztelt, kompatibilis merevlemez-meghajtók jegyzékét az alábbiak szerint: Figyelmeztetés:
TELLMon vevőegység FELHASZNÁLÓI ÚTMUTATÓ. V1.4.96 és újabb verziókhoz Rev. 1.7 2014.03.20
 vevőegység FELHASZNÁLÓI ÚTMUTATÓ V1.4.96 és újabb verziókhoz Rev. 1.7 2014.03.20 Tartalomjegyzék 1 TELLMon legfontosabb technikai jellemzők:... 3 2 Bevezető... 3 3 Rendszer áttekintés... 5 4 A TELLMon
vevőegység FELHASZNÁLÓI ÚTMUTATÓ V1.4.96 és újabb verziókhoz Rev. 1.7 2014.03.20 Tartalomjegyzék 1 TELLMon legfontosabb technikai jellemzők:... 3 2 Bevezető... 3 3 Rendszer áttekintés... 5 4 A TELLMon
AF 088II DIO 16/8 AF 088II DIO 16. Digitális ki-, bemeneti modul. Digitális bemeneti modul
 - Csatlakozás az AF 088II rendszer digitális buszra - Kódkapcsolóval beállitható egység cím0..f - 16 db kétállapotú bemenet (=24V DC) - Galvanikus leválasztás - 1.5 kv szigetelési feszültség - Túlfeszültség
- Csatlakozás az AF 088II rendszer digitális buszra - Kódkapcsolóval beállitható egység cím0..f - 16 db kétállapotú bemenet (=24V DC) - Galvanikus leválasztás - 1.5 kv szigetelési feszültség - Túlfeszültség
Szerelési Útmutató FIGYELEM! ÁRAMÜTÉS VESZÉLYE!
 lux1 kapuvezérlő lux1 kapuvezérlő Szerelési Útmutató FIGYELEM! ÁRAMÜTÉS VESZÉLYE! Áramütés veszélye! A készülék szerelését, bekötését, beállítását kizárólag feszültség mentesített állapotban lehet végezni
lux1 kapuvezérlő lux1 kapuvezérlő Szerelési Útmutató FIGYELEM! ÁRAMÜTÉS VESZÉLYE! Áramütés veszélye! A készülék szerelését, bekötését, beállítását kizárólag feszültség mentesített állapotban lehet végezni
UPS Műszaki Adatlap S-5300X 30 40 kva
 UPS Műszaki Adatlap S-5300X 30 40 kva Statron AG Industrie Nord CH-5506 Maegenwil http//www.statron.com Rev. Description Date Issued Checked Approved Page / of 0 Emission 09-05-11 M.Huser M.Eigenmann M.Dreier
UPS Műszaki Adatlap S-5300X 30 40 kva Statron AG Industrie Nord CH-5506 Maegenwil http//www.statron.com Rev. Description Date Issued Checked Approved Page / of 0 Emission 09-05-11 M.Huser M.Eigenmann M.Dreier
Elektropneumatika. 3. előadás
 3. előadás Tartalom: Az elektropneumatikus vezérlés Az elektropneumatikus a rendszer elemei: hálózati tápegység, elektromechanikus kapcsoló elemek: relék, szelepek, szenzorok. Automatizálástechnika EP
3. előadás Tartalom: Az elektropneumatikus vezérlés Az elektropneumatikus a rendszer elemei: hálózati tápegység, elektromechanikus kapcsoló elemek: relék, szelepek, szenzorok. Automatizálástechnika EP
HITELESÍTÉSI ELŐ ÍRÁS HIDEGVÍZMÉRŐ K IMPULZUSADÓS VÍZMÉRŐ K HE 6/2-2004
 HITELESÍTÉSI ELŐ ÍRÁS HIDEGVÍZMÉRŐ K IMPULZUSADÓS VÍZMÉRŐ K HE 6/2-2004 FIGYELEM! Az előírás kinyomtatott formája tájékoztató jellegű. Érvényes változata Az OMH minőségirányítási rendszerének elektronikus
HITELESÍTÉSI ELŐ ÍRÁS HIDEGVÍZMÉRŐ K IMPULZUSADÓS VÍZMÉRŐ K HE 6/2-2004 FIGYELEM! Az előírás kinyomtatott formája tájékoztató jellegű. Érvényes változata Az OMH minőségirányítási rendszerének elektronikus
1. mérés - LabView 1
 1. mérés - LabView 1 Mérést végezte: Bartha András Mérőtárs: Dobránszky Márk Mérés dátuma: 2015. február 18. Mérés helye: PPKE Információs Technológiai és Bionikai Kar A mérés célja: Ismerkedés a Labview
1. mérés - LabView 1 Mérést végezte: Bartha András Mérőtárs: Dobránszky Márk Mérés dátuma: 2015. február 18. Mérés helye: PPKE Információs Technológiai és Bionikai Kar A mérés célja: Ismerkedés a Labview
Felhasználói kézikönyv
 Felhasználói kézikönyv 90EPC Digitális Multiméter TARTALOMJEGYZÉK 1. Bevezetés... 2 2. Előlap és kezelőszervek... 2 3. Biztonsági információ... 3 4. Speciális használati figyelmeztetések... 3 5. Általános
Felhasználói kézikönyv 90EPC Digitális Multiméter TARTALOMJEGYZÉK 1. Bevezetés... 2 2. Előlap és kezelőszervek... 2 3. Biztonsági információ... 3 4. Speciális használati figyelmeztetések... 3 5. Általános
(1. és 2. kérdéshez van vet-en egy 20 oldalas pdf a Transzformátorokról, ide azt írtam le, amit én kiválasztanék belőle a zh-kérdéshez.
 1. A transzformátor működési elve, felépítése, helyettesítő kapcsolása (működési elv, indukált feszültség, áttétel, felépítés, vasmag, tekercsek, helyettesítő kapcsolás és származtatása) (1. és 2. kérdéshez
1. A transzformátor működési elve, felépítése, helyettesítő kapcsolása (működési elv, indukált feszültség, áttétel, felépítés, vasmag, tekercsek, helyettesítő kapcsolás és származtatása) (1. és 2. kérdéshez
ElMe 6. labor. Helyettesítő karakterisztikák: Valódi karakterisztika 1 pontosabb számításoknál 2 közelítő számításoknál 3 ideális esetben
 ElMe 6. labor 1. Rajzolja fel az ideális és a valódi dióda feszültség-áram jelleggörbéjét! 5. Hogyan szokás közelíteni a számítások során a dióda karakterisztikáját? 4. Rajzolja fel a dióda karakterisztikáját,
ElMe 6. labor 1. Rajzolja fel az ideális és a valódi dióda feszültség-áram jelleggörbéjét! 5. Hogyan szokás közelíteni a számítások során a dióda karakterisztikáját? 4. Rajzolja fel a dióda karakterisztikáját,
4. mérés Jelek és jelvezetékek vizsgálata
 4. mérés Jelek és jelvezetékek vizsgálata (BME-MI, H.J.) Bevezetés A mérési gyakorlat első része a mérésekkel foglalkozó tudomány, a metrológia (méréstechnika) néhány alapfogalmával foglalkozik. A korszerű
4. mérés Jelek és jelvezetékek vizsgálata (BME-MI, H.J.) Bevezetés A mérési gyakorlat első része a mérésekkel foglalkozó tudomány, a metrológia (méréstechnika) néhány alapfogalmával foglalkozik. A korszerű
A Szekszárdi I. Béla Gimnázium Helyi Tanterve
 A Szekszárdi I. Béla Gimnázium Helyi Tanterve Négy évfolyamos gimnázium Informatika Készítette: a gimnázium reál munkaközössége 2015. Tartalomjegyzék Alapvetés...3 Egyéb kötelező direktívák:...6 Informatika
A Szekszárdi I. Béla Gimnázium Helyi Tanterve Négy évfolyamos gimnázium Informatika Készítette: a gimnázium reál munkaközössége 2015. Tartalomjegyzék Alapvetés...3 Egyéb kötelező direktívák:...6 Informatika
1. BEVEZETÉS... 5 2. A RENDSZER ELEMEI, ARCHITEKTÚRÁJA... 5
 EntryProx Beléptető Rendszer FELHASZNÁLÓI KÉZIKÖNYV v.1.0.7. EntryProx Beléptető Rendszer TARTALOM 1. BEVEZETÉS... 5 2. A RENDSZER ELEMEI, ARCHITEKTÚRÁJA... 5 3. A RENDSZER ÜZEMBE HELYEZÉSE... 7 3.1. Az
EntryProx Beléptető Rendszer FELHASZNÁLÓI KÉZIKÖNYV v.1.0.7. EntryProx Beléptető Rendszer TARTALOM 1. BEVEZETÉS... 5 2. A RENDSZER ELEMEI, ARCHITEKTÚRÁJA... 5 3. A RENDSZER ÜZEMBE HELYEZÉSE... 7 3.1. Az
5 Egyéb alkalmazások. 5.1 Akkumulátorok töltése és kivizsgálása. 5.1.1 Akkumulátor típusok
 5 Egyéb alkalmazások A teljesítményelektronikai berendezések két fõ csoportját a tápegységek és a motorhajtások alkotják. Ezekkel azonban nem merülnek ki az alkalmazási lehetõségek. A továbbiakban a fennmaradt
5 Egyéb alkalmazások A teljesítményelektronikai berendezések két fõ csoportját a tápegységek és a motorhajtások alkotják. Ezekkel azonban nem merülnek ki az alkalmazási lehetõségek. A továbbiakban a fennmaradt
Használati Útmutató. Thunder AC6 akkutöltő
 Használati Útmutató Thunder AC6 akkutöltő Mikroprocesszor vezérlésû, nagy teljesítményű akkutöltő és kisütő NiCd/NiMH/Líthium/Pb akkumulátorokhoz Beépített balanszerrel Kettős bemeneti feszültség (AC/DC
Használati Útmutató Thunder AC6 akkutöltő Mikroprocesszor vezérlésû, nagy teljesítményű akkutöltő és kisütő NiCd/NiMH/Líthium/Pb akkumulátorokhoz Beépített balanszerrel Kettős bemeneti feszültség (AC/DC
A megfelelő IP védelem biztosításával, alkalmasak a kültéri alkalmazások kialakítására.
 AA-RC1A v2.3 Technikai adatok: Tápfeszültség: 12-24V Digitális / Logikai kimenetek: 8 darab open-collector kimenet, közvetlenül relé meghajtására alkalmasak, 500mA terhelhetőségűek Digitális bemenetek:
AA-RC1A v2.3 Technikai adatok: Tápfeszültség: 12-24V Digitális / Logikai kimenetek: 8 darab open-collector kimenet, közvetlenül relé meghajtására alkalmasak, 500mA terhelhetőségűek Digitális bemenetek:
Mérlegelés Kártyaolvasóval
 METRISoft Mérleggyártó KFT PortaWin (PW2) Jármű mérlegelő program 6800 Hódmezővásárhely Jókai u. 30 Telefon: (62) 246-657, Fax: (62) 249-765 e-mail: merleg@metrisoft.hu Web: http://www.metrisoft.hu Módosítva:
METRISoft Mérleggyártó KFT PortaWin (PW2) Jármű mérlegelő program 6800 Hódmezővásárhely Jókai u. 30 Telefon: (62) 246-657, Fax: (62) 249-765 e-mail: merleg@metrisoft.hu Web: http://www.metrisoft.hu Módosítva:
Az általam használt (normál 5mm-es DIP) LED maximális teljesítménye 50mW körül van. Így a maximálisan alkalmazható üzemi árama:
 LED maximális teljesítménye 50mW körül van. Így a maximálisan alkalmazható üzemi árama:") Az alábbi néhány egyszerű kapcsolás próbál segíteni megérteni a tranzisztor alapvető működését. Elsőre egy olyan kapcsolást szemlélünk, amelyben egy kapcsolót ha felkapcsolunk, akkor egy tetszőleges fogyasztó
Az alábbi néhány egyszerű kapcsolás próbál segíteni megérteni a tranzisztor alapvető működését. Elsőre egy olyan kapcsolást szemlélünk, amelyben egy kapcsolót ha felkapcsolunk, akkor egy tetszőleges fogyasztó
Év zárása és nyitása 2015-ről 2016-ra
 Év zárása és nyitása 2015-ről 2016-ra Ebben az évben a megszokottól eltérően, új programot kell telepíteni. Ennek lépései: 1. lépjen ki a DszámlaWIN programból (FONTOS!). Amennyiben hálózatban használják
Év zárása és nyitása 2015-ről 2016-ra Ebben az évben a megszokottól eltérően, új programot kell telepíteni. Ennek lépései: 1. lépjen ki a DszámlaWIN programból (FONTOS!). Amennyiben hálózatban használják
Felhasználói kézikönyv. Zárt hurkú, léptetőmotoros rendszer, HSS86 típusú meghajtó és 86HSE8N-BC38 motorral.
 Felhasználói kézikönyv Zárt hurkú, léptetőmotoros rendszer, HSS86 típusú meghajtó és 86HSE8N-BC38 motorral. Bevezetés A HSS86 egy új típusú léptetőmotor meghajtó, mely enkóderrel visszacsatolt, áramvektoros
Felhasználói kézikönyv Zárt hurkú, léptetőmotoros rendszer, HSS86 típusú meghajtó és 86HSE8N-BC38 motorral. Bevezetés A HSS86 egy új típusú léptetőmotor meghajtó, mely enkóderrel visszacsatolt, áramvektoros
3 Tápegységek. 3.1 Lineáris tápegységek. 3.1.1 Felépítés
 3 Tápegységek A tápegységeket széles körben alkalmazzák analóg és digitális berendezések táplálására. Szerkezetileg ezek az áramkörök AC-DC vagy DC-DC átalakítók. A kimenet tehát mindig egyenáramú, a bemenet
3 Tápegységek A tápegységeket széles körben alkalmazzák analóg és digitális berendezések táplálására. Szerkezetileg ezek az áramkörök AC-DC vagy DC-DC átalakítók. A kimenet tehát mindig egyenáramú, a bemenet
A DDS áramkörök használata.
 A DDS áramkörök használata. Az is lehet, hogy a DDS-ek a legjobb találmányok közé tartoznak egy rádióamatőr számára. Egy stabil frekvenciájú jelforrás előállítása házi körülmények között minden időben
A DDS áramkörök használata. Az is lehet, hogy a DDS-ek a legjobb találmányok közé tartoznak egy rádióamatőr számára. Egy stabil frekvenciájú jelforrás előállítása házi körülmények között minden időben
Korszerű raktározási rendszerek. Szakdolgozat
 Gépészmérnöki és Informatikai Kar Mérnök Informatikus szak Logisztikai Rendszerek szakirány Korszerű raktározási rendszerek Szakdolgozat Készítette: Buczkó Balázs KOKIOC 3770 Sajószentpéter, Ady Endre
Gépészmérnöki és Informatikai Kar Mérnök Informatikus szak Logisztikai Rendszerek szakirány Korszerű raktározási rendszerek Szakdolgozat Készítette: Buczkó Balázs KOKIOC 3770 Sajószentpéter, Ady Endre
TC3XY NT/MT Beléptető rendszer 1.0 verzió Telepítési Útmutató 2005 08 27
 1 oldal TC3XY NT/MT Beléptető rendszer 1.0 verzió Telepítési Útmutató 2005 08 27 2 oldal Tartalom I. BEVEZETÉS...4 I.1. A TC3XY VEZÉRLŐ...4 I.2. ÁLTALÁNOS BIZTONSÁGI ÖSSZEFOGLALÓ...4 I.3. ELEKTRONIKUS
1 oldal TC3XY NT/MT Beléptető rendszer 1.0 verzió Telepítési Útmutató 2005 08 27 2 oldal Tartalom I. BEVEZETÉS...4 I.1. A TC3XY VEZÉRLŐ...4 I.2. ÁLTALÁNOS BIZTONSÁGI ÖSSZEFOGLALÓ...4 I.3. ELEKTRONIKUS

Használati útmutató. Xperia C C2305/C2304
 Használati útmutató Xperia C C2305/C2304 Tartalomjegyzék Xperia C Használati útmutató...6 Első lépések...7 Android mi ez és mire való?...7 Áttekintés...7 Összeszerelés...8 Az eszköz be- és kikapcsolása...10
Használati útmutató Xperia C C2305/C2304 Tartalomjegyzék Xperia C Használati útmutató...6 Első lépések...7 Android mi ez és mire való?...7 Áttekintés...7 Összeszerelés...8 Az eszköz be- és kikapcsolása...10
DJ KEVERŐPULT DJM-400
 DJ KEVERŐPULT DJM-400 HASZNÁLATI ÚTMUTATÓ Köszönjük, hogy Pioneer terméket választott. Kérjük tanulmányozza át ezt a használati útmutatót, hogy alaposabban megismerkedhessen a készülék működetésével. Az
DJ KEVERŐPULT DJM-400 HASZNÁLATI ÚTMUTATÓ Köszönjük, hogy Pioneer terméket választott. Kérjük tanulmányozza át ezt a használati útmutatót, hogy alaposabban megismerkedhessen a készülék működetésével. Az
Vacon többvezérléső alkalmazás (Szoftver ALFIFF20) Ver. 1.02
 Ver. 1.02") Többvezérléső alkalmazás az NXL-hez 1 1 Vacon többvezérléső alkalmazás (Szoftver ALFIFF20) Ver. 1.02 Tartalom 1 BEVEZETÉS... 2 2 VEZÉRLİ I/O... 3 3 TÖBBVEZÉRLÉSŐ ALKALMAZÁS A PARAMÉTEREK FELSOROLÁSA...
Többvezérléső alkalmazás az NXL-hez 1 1 Vacon többvezérléső alkalmazás (Szoftver ALFIFF20) Ver. 1.02 Tartalom 1 BEVEZETÉS... 2 2 VEZÉRLİ I/O... 3 3 TÖBBVEZÉRLÉSŐ ALKALMAZÁS A PARAMÉTEREK FELSOROLÁSA...
KEZELÉSI 1 MEGFELELŐSÉGI NYILATKOZAT / TANÚSÍTVÁNY
 RV3-25/P teljesítményszabályozó Ez az kézikönyv fontos útmutatást és a biztonságra vonatkozó figyelmeztetéseket tartalmaz. Mielőtt telepíti az egységet, a megfelelő működés biztosítása és az Ön biztonsága
RV3-25/P teljesítményszabályozó Ez az kézikönyv fontos útmutatást és a biztonságra vonatkozó figyelmeztetéseket tartalmaz. Mielőtt telepíti az egységet, a megfelelő működés biztosítása és az Ön biztonsága
1. Adja meg az áram egységének mértékrendszerünkben (m, kg, s, A) érvényes definícióját!
 érvényes definícióját!") 1. Adja meg az áram egységének mértékrendszerünkben (m, kg, s, A) érvényes definícióját! A villamos áram a villamos töltések rendezett mozgása. A villamos áramerősség egységét az áramot vivő vezetők közti
1. Adja meg az áram egységének mértékrendszerünkben (m, kg, s, A) érvényes definícióját! A villamos áram a villamos töltések rendezett mozgása. A villamos áramerősség egységét az áramot vivő vezetők közti
KÉPZETT VILLANYSZERELŐ SZAKEMBER
 relaydroid TM Felhasználói Dokumentáció Tartalom 1. Általános leírás... 2 2. Specifikáció... 3 2.1. Modellek... 3 2.2. Paraméterek... 3 2.3. Elrendezés és méretek... 4 17.5mm széles modellek... 4 35mm
relaydroid TM Felhasználói Dokumentáció Tartalom 1. Általános leírás... 2 2. Specifikáció... 3 2.1. Modellek... 3 2.2. Paraméterek... 3 2.3. Elrendezés és méretek... 4 17.5mm széles modellek... 4 35mm
GSM-LINE ADAPTER PRO 5 GSM 900MHz / 1800MHz / 850MHz / 1900MHz HASZNÁLATI ÚTMUTATÓ
 GSM-LINE ADAPTER PRO 5 GSM 900MHz / 1800MHz / 850MHz / 1900MHz HASZNÁLATI ÚTMUTATÓ A készülék funkciói A GSM-LINE ADAPTER PRO célja, hogy a GSM hálózatra illessze azokat a riasztórendszereket, melyek vezetékes
GSM-LINE ADAPTER PRO 5 GSM 900MHz / 1800MHz / 850MHz / 1900MHz HASZNÁLATI ÚTMUTATÓ A készülék funkciói A GSM-LINE ADAPTER PRO célja, hogy a GSM hálózatra illessze azokat a riasztórendszereket, melyek vezetékes
A stabil üzemű berendezések tápfeszültségét a hálózati feszültségből a hálózati tápegység állítja elő (1.ábra).
.") 3.10. Tápegységek Az elektronikus berendezések (így a rádiók) működtetéséhez egy vagy több stabil tápfeszültség szükséges. A stabil tápfeszültség időben nem változó egyenfeszültség, melynek értéke független
3.10. Tápegységek Az elektronikus berendezések (így a rádiók) működtetéséhez egy vagy több stabil tápfeszültség szükséges. A stabil tápfeszültség időben nem változó egyenfeszültség, melynek értéke független
ű Ö ű ű Ú Ú ű
 ű Ö ű ű Ú Ú ű Á Á Ö Ö Ö Ö Ö Ö Á Ö Á Á Á Ú Á Á Á Á Ö ű ű Á ű ű ű Ö Ö Á Á Á Á Á ű Ú Ö ű Ú Ú ű Ú Á Á ű ű ű ű ű ű Á ű ű Á Á Ő Á Á Á Á Á Á Ö Á ű ű Ö Ö ű Ú Ö Ú ű Ú ű ű ű ű ű Ö Á Ú ű Á Ö Á Ú Á Á Á Á Á Á Ö Ö Á
ű Ö ű ű Ú Ú ű Á Á Ö Ö Ö Ö Ö Ö Á Ö Á Á Á Ú Á Á Á Á Ö ű ű Á ű ű ű Ö Ö Á Á Á Á Á ű Ú Ö ű Ú Ú ű Ú Á Á ű ű ű ű ű ű Á ű ű Á Á Ő Á Á Á Á Á Á Ö Á ű ű Ö Ö ű Ú Ö Ú ű Ú ű ű ű ű ű Ö Á Ú ű Á Ö Á Ú Á Á Á Á Á Á Ö Ö Á
A Hyundai R-CRDI motorok alrendszerei, érzékelői és beavatkozói 2. rész
 A Hyundai R-CRDI motorok alrendszerei, érzékelői és beavatkozói 2. rész Előző számunkban a Hyundai R-CRDI motorok általános jellemzőit és szerkezeti felépítését mutattuk be, egyesével elemeztük a blokkot
A Hyundai R-CRDI motorok alrendszerei, érzékelői és beavatkozói 2. rész Előző számunkban a Hyundai R-CRDI motorok általános jellemzőit és szerkezeti felépítését mutattuk be, egyesével elemeztük a blokkot
Quantometer 2.0 Fogyasztásmérő program és illesztőkészülék
 Quantometer 2.0 Fogyasztásmérő program és illesztőkészülék Felhasználói kézikönyv #3 Verzió SCSSoft Kft. 2002. Tartalomjegyzék: Az illesztőegység... 3 Illesztőegység csatlakozói, kezelőszervei, jelzései...
Quantometer 2.0 Fogyasztásmérő program és illesztőkészülék Felhasználói kézikönyv #3 Verzió SCSSoft Kft. 2002. Tartalomjegyzék: Az illesztőegység... 3 Illesztőegység csatlakozói, kezelőszervei, jelzései...
SL7000. Intelligens kereskedelmi és ipari fogyasztásmérő
 SL7000 Intelligens kereskedelmi és ipari fogyasztásmérő Kereskedelmi és ipari fogyasztásmérők Az SL7000 ipari és kereskedelmi fogyasztásmérők a mérési alkalmazások széles körét teszik lehetővé a kis ipari
SL7000 Intelligens kereskedelmi és ipari fogyasztásmérő Kereskedelmi és ipari fogyasztásmérők Az SL7000 ipari és kereskedelmi fogyasztásmérők a mérési alkalmazások széles körét teszik lehetővé a kis ipari
Előszó 4 Technikai paraméterek: 5 1 Általános leírás 6
 TARTALOM Verzió szám: 1.1 Előszó 4 Technikai paraméterek: 5 1 Általános leírás 6 1.1 Pénztárgép részei 6 1.2 Billentyűzet 7 1.3 Kijelzők 9 1.4 A pénztárgép feszültség ellátása 9 1.5 Papírszalag csere 9
TARTALOM Verzió szám: 1.1 Előszó 4 Technikai paraméterek: 5 1 Általános leírás 6 1.1 Pénztárgép részei 6 1.2 Billentyűzet 7 1.3 Kijelzők 9 1.4 A pénztárgép feszültség ellátása 9 1.5 Papírszalag csere 9
IDAXA-PiroSTOP HI1 Hurokkezelő 1 intelligens hurokhoz 2004/0177/063 Terméklap
 IDAXA-PiroSTOP HI Hurokkezelő intelligens hurokhoz 24/77/63 Terméklap Hexium Kft. HI Terméklap Rev 2 2 Tartalomjegyzék. ISMERTETŐ... 3 2. HARDVER... 4 2. LED... 5 2.2 KAPCSOLAT A VEZ EGYSÉG FELÉ... 5 2.3
IDAXA-PiroSTOP HI Hurokkezelő intelligens hurokhoz 24/77/63 Terméklap Hexium Kft. HI Terméklap Rev 2 2 Tartalomjegyzék. ISMERTETŐ... 3 2. HARDVER... 4 2. LED... 5 2.2 KAPCSOLAT A VEZ EGYSÉG FELÉ... 5 2.3
Logoprint 500. Sajátosságok határérték figyelés eseményjelzés terjedelmes szövegkijelzés statisztika (jelentés) min- / max- és középértékkel
 min- / max- és középértékkel") Meß- und Regelgeräte GmbH A-1232 Wien, Pfarrgasse 48 Magyarországi Kereskedelmi Képviselet Telefon: 00-43-1 / 61-061-0 H-1147 Budapest Öv u. 143. Fax: 00-43-1 / 61-061-59 Telefon/fax: 00-36-1 / 467-0835,
Meß- und Regelgeräte GmbH A-1232 Wien, Pfarrgasse 48 Magyarországi Kereskedelmi Képviselet Telefon: 00-43-1 / 61-061-0 H-1147 Budapest Öv u. 143. Fax: 00-43-1 / 61-061-59 Telefon/fax: 00-36-1 / 467-0835,
Mérés labor 2 AVR házi feladatok
 Page 1 of 6 Mérés labor 2 AVR házi feladatok Jelzőlámpák, fényjátékok Forgalmi jelzőlámpa fényérzékelő éjszakai üzemmóddal A két LED oszlop egy-egy jelzőlámpája a kereszteződés két irányának tekintendő
Page 1 of 6 Mérés labor 2 AVR házi feladatok Jelzőlámpák, fényjátékok Forgalmi jelzőlámpa fényérzékelő éjszakai üzemmóddal A két LED oszlop egy-egy jelzőlámpája a kereszteződés két irányának tekintendő
útmutató Performer 530 fedélzeti számítógéphez
 Használati és ügyfélszolgálati útmutató Performer 530 fedélzeti számítógéphez Tar talom ÁLTALÁNOS INFORMÁCIÓK...2 BEVEZETÉS...2 BIZTONSÁG...3 LEÍRÁS...4 Motoros működés...5 Mérés...5 Választható programok...5
Használati és ügyfélszolgálati útmutató Performer 530 fedélzeti számítógéphez Tar talom ÁLTALÁNOS INFORMÁCIÓK...2 BEVEZETÉS...2 BIZTONSÁG...3 LEÍRÁS...4 Motoros működés...5 Mérés...5 Választható programok...5
Mérlegjegy nyomtatása külső nyomógombbal indítva
 METRI Soft Mérleggyártó KFT PortaWin (PW2) Jármű mérlegelő program 6800 Hódmezővásárhely Jókai u. 30 Telefon: (62) 246-657, Fax: (62) 249-765 e-mail: merleg@metrisoft.hu Web: http://www.metrisoft.hu Módosítva:
METRI Soft Mérleggyártó KFT PortaWin (PW2) Jármű mérlegelő program 6800 Hódmezővásárhely Jókai u. 30 Telefon: (62) 246-657, Fax: (62) 249-765 e-mail: merleg@metrisoft.hu Web: http://www.metrisoft.hu Módosítva:
SITRANS FUS380 ultrahangos áramlásmér. SITRANS FUE380 ultrahangos áramlásmér
 Beépítési utasítás 2007/08-as kiadás SITRANS F US SITRANS FUS380 ultrahangos áramlásmér SITRANS FUE380 ultrahangos áramlásmér (MID tanúsítvánnyal h mennyiség méréshez) [ ] Technical Documentation (handbooks,
Beépítési utasítás 2007/08-as kiadás SITRANS F US SITRANS FUS380 ultrahangos áramlásmér SITRANS FUE380 ultrahangos áramlásmér (MID tanúsítvánnyal h mennyiség méréshez) [ ] Technical Documentation (handbooks,
C55. ECL Comfort. Használati utasítás. beállítás. Felszerelés és. ECL Comfort C55. Használati utasítás. Felszerelés és beállítás *VI7CJ447* *087R8194*
 Használati utasítás VI.7C.J4.47 2007.01 C55 *VI7CJ447* *087R8194* www.hu.danfoss.com ECL Comfort Használati utasítás ECL Comfort Felszerelés és beállítás www.hu.danfoss.com *087R8194* *VI7CJ447* Kazán
Használati utasítás VI.7C.J4.47 2007.01 C55 *VI7CJ447* *087R8194* www.hu.danfoss.com ECL Comfort Használati utasítás ECL Comfort Felszerelés és beállítás www.hu.danfoss.com *087R8194* *VI7CJ447* Kazán
Sorompó kezelés mérlegműszerrel
 METRISoft Mérleggyártó KFT PortaWin (PW2) Jármű mérlegelő program 6800 Hódmezővásárhely Jókai u. 30 Telefon: (62) 246-657, Fax: (62) 249-765 e-mail: merleg@metrisoft.hu Web: http://www.metrisoft.hu Módosítva:
METRISoft Mérleggyártó KFT PortaWin (PW2) Jármű mérlegelő program 6800 Hódmezővásárhely Jókai u. 30 Telefon: (62) 246-657, Fax: (62) 249-765 e-mail: merleg@metrisoft.hu Web: http://www.metrisoft.hu Módosítva:
Kvantumkriptográfia III.
 LOGO Kvantumkriptográfia III. Gyöngyösi László BME Villamosmérnöki és Informatikai Kar Tantárgyi weboldal: http://www.hit.bme.hu/~gyongyosi/quantum/ Elérhetőség: gyongyosi@hit.bme.hu A kvantumkriptográfia
LOGO Kvantumkriptográfia III. Gyöngyösi László BME Villamosmérnöki és Informatikai Kar Tantárgyi weboldal: http://www.hit.bme.hu/~gyongyosi/quantum/ Elérhetőség: gyongyosi@hit.bme.hu A kvantumkriptográfia
ÜZEMMÓD A KIJELZŐ MEGVILÁGÍTÁSÁNAK MŰKÖDTETÉSE. Outbreaker Plus Megrend. szám: 84 00 90
 Conrad Vevőszolgálat, 1124 Budapest, Jagelló út 30. Tel: 319 0250 Outbreaker Plus Megrend. szám: 84 00 90 1. fejezet: Bevezetés A jelen Outbreaker sorozathoz három típus tartozik: OUTBREAKER SMART OUTBREAKER
Conrad Vevőszolgálat, 1124 Budapest, Jagelló út 30. Tel: 319 0250 Outbreaker Plus Megrend. szám: 84 00 90 1. fejezet: Bevezetés A jelen Outbreaker sorozathoz három típus tartozik: OUTBREAKER SMART OUTBREAKER
Kezelési útmutató DigiDirve-3.x
 Kezelési útmutató DigiDirve-3.x Hardver verzió: 3 Szoftver verzió (CV7 értéke): 13, vagy magasabb Dokumentum verzió: b2 1 Tartalomjegyzék Általános jellemzők:... 3 Főbb paraméterek:... 4 Bekötés:... 5
Kezelési útmutató DigiDirve-3.x Hardver verzió: 3 Szoftver verzió (CV7 értéke): 13, vagy magasabb Dokumentum verzió: b2 1 Tartalomjegyzék Általános jellemzők:... 3 Főbb paraméterek:... 4 Bekötés:... 5
Plena VAS configuration
 Plena VAS configuration Configuration Software hu Software manual Plena VAS configuration Tartalomjegyzék hu 3 Tartalomjegyzék 1 A kézikönyvről 5 1.1 Az útmutató célja 5 1.2 Digitális dokumentum 5 1.3
Plena VAS configuration Configuration Software hu Software manual Plena VAS configuration Tartalomjegyzék hu 3 Tartalomjegyzék 1 A kézikönyvről 5 1.1 Az útmutató célja 5 1.2 Digitális dokumentum 5 1.3
INFORMATIKAI ALAPISMERETEK
 Informatikai alapismeretek középszint 0521 É RETTSÉGI VIZSGA 2005. október 24. INFORMATIKAI ALAPISMERETEK KÖZÉPSZINTŰ ÍRÁSBELI ÉRETTSÉGI VIZSGA JAVÍTÁSI-ÉRTÉKELÉSI ÚTMUTATÓ OKTATÁSI MINISZTÉRIUM I. rész
Informatikai alapismeretek középszint 0521 É RETTSÉGI VIZSGA 2005. október 24. INFORMATIKAI ALAPISMERETEK KÖZÉPSZINTŰ ÍRÁSBELI ÉRETTSÉGI VIZSGA JAVÍTÁSI-ÉRTÉKELÉSI ÚTMUTATÓ OKTATÁSI MINISZTÉRIUM I. rész
2016.03.30. SmartDoorSet Projekt Innovációs pályamunka. Boruzs Kevin & Kajtár Gergő
 2016.03.30. SmartDoorSet Projekt Innovációs pályamunka Boruzs Kevin & Kajtár Gergő SmartDoorSet Projekt A Történelem egy apró szelete Egy innováció, vagy start-up, de akár egy egyszerű projektnél is nagyon
2016.03.30. SmartDoorSet Projekt Innovációs pályamunka Boruzs Kevin & Kajtár Gergő SmartDoorSet Projekt A Történelem egy apró szelete Egy innováció, vagy start-up, de akár egy egyszerű projektnél is nagyon