Közúti járműrendszerek
|
|
|
- Balázs Orsós
- 8 évvel ezelőtt
- Látták:
Átírás
1 Közúti járműrendszerek 1 Alapfogalmak 1.1 Közúti jármű definíciója Közúton közlekedő szállító, vagy vontató eszköz, továbbá önjáró munkagép vagy vontatott munkagép. A közúti járművek fajtái Gépjármű: Közúti jármű, melyet beépített erőgép hajt, de nem gépjármű a mezőgazdasági vontató, a lassú jármű és a segédmotoros kerékpár. Gépkocsi: Gépjármű, melynek négy vagy több kereke van, de nem gépkocsi a négykerekű motorkerékpár. Személygépkocsi: Személyszállításra készült gépkocsi, melyben a vezetőüléssel együtt maximum kilenc ülés van. Autóbusz: Személyszállításra készült gépkocsi, melyben kilencnél több ülőhely van. Trolibusz: Felső elektromos vezetékhez kötött személyszállító gépkocsi. Vontató: Pótkocsi vontatására készült rakfelület nélküli gépkocsi. Nyerges vontató: Olyan vontató, amely nyeregszerkezet révén félpótkocsit vontat, a pótkocsi súlyának jelentős részét átveszi. Tehergépkocsi: Teherszállításra alkalmas rakfelülettel rendelkező gépkocsi

2 - 2 -
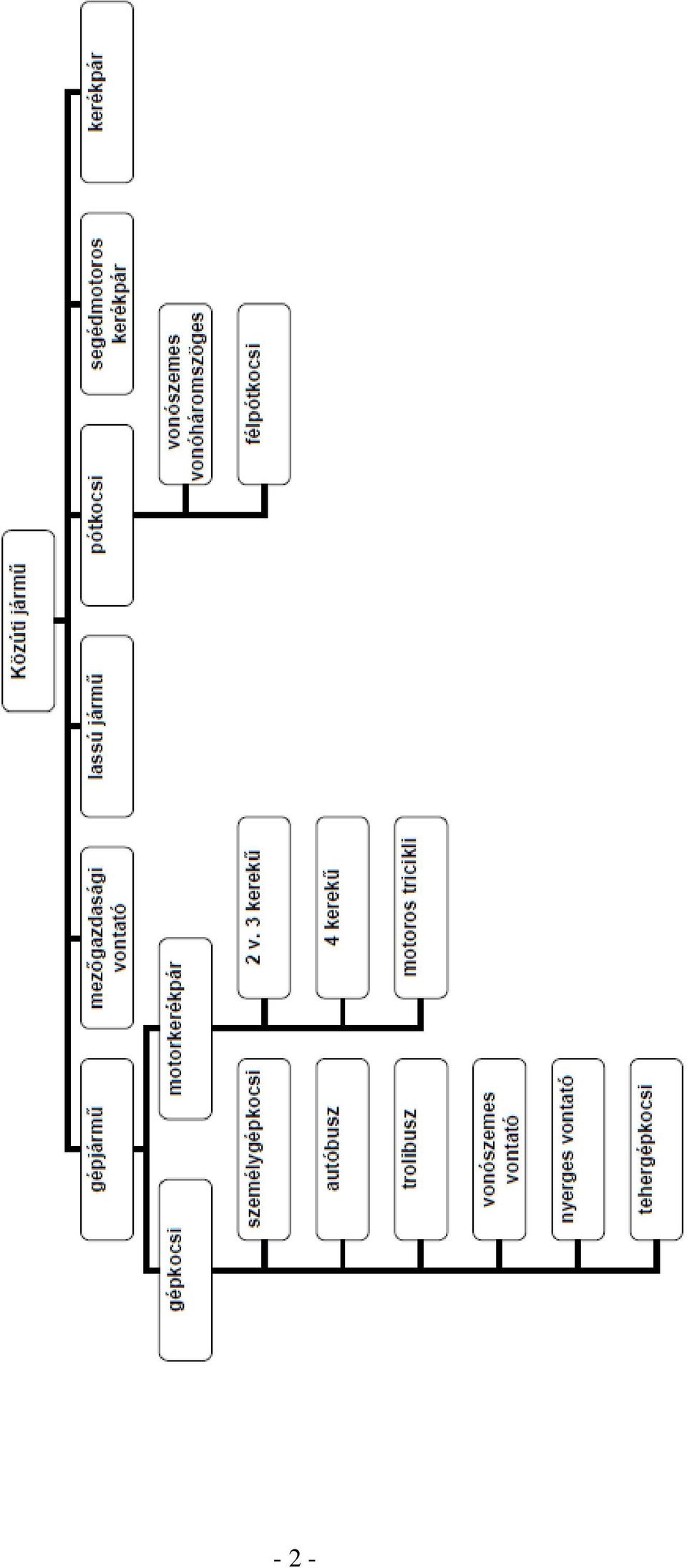
3 Motorkerékpár: Két, vagy három kerékkel rendelkező gépjármű, melynek tervezett sebessége 45 km/h-nál nagyobb. Motorkerékpárnak minősül az olyan gépjármű, melynek saját tömege legfeljebb 550 kg, maximális teljesítménye 15 kw és direkt áttételű kormánymechanizmussal irányítható. Motoros tricikli: Teherszállításra szolgáló motorkerékpár, melynek a jármű hossztengelyére szimmetrikus elhelyezésű három kereke van. Mezőgazdasági vontató: Elsősorban mezőgazdasági célú munkálatok elvégzéséra alkalmas pótkocsik, munkagépek vontatására, működtetésére szolgál, legalább kéttengelyes, a közúton 25 km/h sebességnél gyorsabban is haladhat. Lassú jármű: Erőgép hajtású jármű, mely maximálisan 25 km/h sebességgel haladhat. Pótkocsi: Gépjárművel, mezőgazdasági vontatóval, lassú járművel vontatható jármű, amely 750 kg megengedett legnagyobb együttes tömegig könnyű pótkocsinak, azon felül nehéz pótkocsinak minősül. Félpótkocsi: A vontató nyeregszerkezetére támaszkodik, súlyának jelentős részét a vontató veszi át. Járműszerelvény: Gépjármű, mezőgazdasági vontató, lassú jármű a hozzákapcsolt pótkocsival közösen alkotott, egy vezetővel irányított járműegység. Segédmotoros kerékpár: 2, 3 vagy 4 kerekű jármű, melynek belsőégésű motorja maximálisan 50 cm3, egyéb erőforrás esetén a motor teljesítménye legfeljebb 4 kw, saját tömege maximum 350 kg, legnagyobb sebessége 45 km/h

4 Kerékpár: 2 vagy 3 kerekű jármű, melyet 1-2 személy emberi ereje hajt, esetleg maximum 300 W teljesítményű motorral rendelkezik, melyre még egy 10 éven aluli gyermek részére pótülés felszerelhető, és egy meghatározott kerékpár utánfutót is vontathat. 1.2 A közúti járművek históriája A közúti járművek történetének kiemelkedő eredményei: 1769 Cugnot francia tüzértiszt gőzüstös önjáró kocsija Különféle gőzhajtású kocsik és vontatók a közutakon Angliában megalkotják a vörös zászló törvényt, mely szerint a gőzkocsik előtt egy vörös zászlós embernek kellett gyalogolni, és figyelmeztetni a veszélyre az arra járókat Az első működő benzinmotor Otto és Zonz szabadalma Karl Benz háromkerekű motoros kocsi szabadalma. Gottlieb Daimler négykerekű motorkocsi szabadalma tekinthető a gépjárművek ősének A benzin porlasztó (karburátor) szabadalmaztatása közel egy időben a magyar Bánki és Csonka, valamint a német Maybach feltalálók részéről. A bejelentés elsőbbsége a magyaroké, az első működő, motorra felszerelt karburátort Maybach készítette Elkészült az első Rudolf Diesel tervezte motor Csonka János elkészítette első postaautóját Felépült az első magyar autógyár MARTA néven Aradon Galamb József tervezte a világ első sorozatban, futószalagon gyártott autóját, a Ford T-modellt es évek magyar autógyárak: Rába, Ikarus, Csepel - 4 -

5 1886 Karl Benz találmánya 1886 Gottlieb Daimler találmánya - 5 -

6 Napjaink magyarországi autó- és járműgyárak: Opel, Suzuki, Audi, Ikarus, Credo, Schwarzmüller autóalkatrész gyártók: Knorr Bremse, Thyssen-Krupp, Haldex, Bosch, Ford, Denso, Alko, stb. 1.3 A közúti járműrendszerek A közúti járművek a következő járműrendszerekből (korábbi elnevezéssel fődarabokból) épülnek fel: Motor: belsőégésű Otto, Diesel elektromotor Erőátviteli rendszer: tengelykapcsoló sebességváltó tengelyhajtások differenciálmű Fékrendszer: üzemi fék biztonsági fék rögzítő fék tartós, lassító fék Kormányrendszer: alvázkormányzási rendszer tengelykormányzás tengelycsonk (Ackermann) kormányzás Futómű: komplett kerék kerékfelfüggesztés rugózási rendszer Felépítmény: alváz kocsitest burkolatok Elektromos rendszer: generátorok - 6 -
 kormányzás Futómű: komplett kerék kerékfelfüggesztés rugózási rendszer Felépítmény: alváz kocsitest burkolatok Elektromos rendszer:")
7 akkumulátorok világító- és jelzőberendezések Segédberendezések: klíma és szellőztető eszközök biztonsági berendezések navigációs rendszerek informatikai berendezések 2 Közúti járművek Erőátviteli rendszerek (kiegészítés) 2.1 Erőátviteli rendszerek variációi belsőégésű motoros közúti járműveknél: Jelölések: M motor T tengelykapcsoló V sebességváltó H véghajtómű D differenciálmű th tengelyhajtás mi menetirány orrmotor hátsókerékhajtás (BMW, Mercedes) - 7 -

8 farmotor hátsókerékhajtás (VW Bogár, Skoda, Porsche) középmotoros hátsókerékhajtás (versenyautók) - 8 -

9 orrmotoros elsőkerékhajtás (Audi) keresztmotoros elsőkerékhajtás - 9 -

10 keresztmotoros összkerékhajtás 2.2 Közúti járműdinamikai alapismeretek A következőkben az emelkedőn haladó gépjármű mozgásviszonyait elemezzük, vagyis menetdinamikai vizsgálatokat végzünk. Az α lejtőszögű emelkedőn felfelé haladó gépjárműre aktív és passzív erők, ellenállások hatnak. A dinamikai vizsgálat eredményeként felállítható mozgásegyenlet valamennyi erő és ellenállás egyensúlyát fejezi ki, melynek megoldása révén pontosan leírhatjuk a jármű mozgásviszonyait. Így például a maximális sebességét, pillanatnyi sebességét, gyorsulását, adott idő alatt megtett utat, elérhető sebességét, a váltási fokozatok váltási sebességeit is. A közúti járműdinamikai vizsgálatok során a mozgó koordináta rendszert általában a jármű súlypontjába helyezzük, az x tengely az útsíkjában a menetirányba mutat, az y tengely az út síkjában keresztirányt jelöl, a z tengely az út síkjára merőleges irány. Az álló koordináta rendszert a földi gravitációs irányokhoz kötjük

11 Ahhoz, hogy a jármű emelkedőn felfelé gyorsulva haladhasson, a motor által a hajtott kerekek talppontjában akkor aktív erőt kell kifejteni, hogy képes legyen a ment közben fellépő passzív erőket, ellenállásokat legyőzni. Ezt az aktív erőt vonóerőnek nevezzük. Vonóerő (aktív erők) ahol: M m a motor pillanatnyi nyomatéka (Nm) K s - a sebességváltó bekapcsolt fokozatának nyomatékmódosítása K o a véghajtómű (differenciálmű) nyomatékmódosítása η ö az erőátviteli rendszer összes hatásfoka (mechanikai és hidraulikus súrlódások, olaj és levegő keverés) R g A kerék gördülési sugara (a menetközben merhető tényleges sugár, amelyik a gumiabroncs deformációját és relatív csúszását slipjét is figyelembe véve lehet kiszámítani) (m)
 R g A kerék gördülési sugara (a menetközben merhető tényleges sugár,")
12 Súlyerő (passzív erő) ahol: M a jármű menetközbeni effektív tömege (kg) g a gravitációs állandó (9,81 m/s 2 ) A súlyerő összetevői: A lejtő irányába hat, a járművet lefelé mozgatná, ezért lejtőellenállásnak is nevezik. Természetesen a lejtőn lefelé haladva aktív erőként is értelmezhető. Ez az erő a járművet az útfelülethez szorítja. Hatására a kerekek talppontjában reakcióerők lépnek fel. Az egyes futóművekre eső leszorító erőt tengelyterhelésnek, a kerekekre ható erőt kerékterhelésnek nevezzük. Vagyis ahol: Z e az első tengelyterhelés (N) Z h a hátsó tengelyterhelés (N) ahol: Z i az egyes kerekekre ható leszorító erő, kerékterhelés (N) Gördülő ellenállás ahol: F fi egy kerék gördülő ellenállása (N) f a gumiabroncs és az útfelület közötti gördülési ellenállási tényező, melynek értéke száraz beton, aszfalt úton 0,01, de sáros, havas úton akár 0,3 is lehet. Z i kerékterhelés (N) - az egész jármű gördülési ellenállása
 Z h a hátsó tengelyterhelés (N) ahol: Z i az egyes kerekekre ható leszorító erő, kerékterhelés (N) Gördülő ellenállás ahol: F fi egy kerék gördülő")
13 Légellenállás ahol: C w a jármű légellenállási tényezője, mely függ a jármű formájától, alakjától, felületének érdességétől, a ki- és beömlő levegőnyílások méretétől. Nagysága 0,1-0,5 között változik, versenyautóknál 0,15, korszerű személyautóknál 0,28, teherautóknál 0,5. ρ=1,293 kg/m 3, a levegő sűrűsége A a jármű homlokfelülete a szélsebesség és a járműsebesség menetirányba eső eredője, szélcsendes időben a jármű sebességével egyenlő (m/sec) Tömegellenállás ahol: a a jármű gyorsulása (m/s 2 ) δ a jármű forgó tömegeit figyelembe vevő tényező, miután a gyorsítás esetén nem csak a jármű tömege jelent tehetetlenségi ellenállást, hanem a jármű forgó tömegeit is (kerekek, fogaskerekek, tengelyek, motor forgó alkatrészei) nagyobb fordulatszámra kell gyorsítani, ez az inercia ellenállás. δ=1,1-1,5 az adott jármű esetén kell meghatározni A járműre ható ellenállások és aktív erők ismeretében már felírható az erők egyensúlyi egyenlete, vagyis a jármű mozgásegyenlete. A jármű dinamikus mozgásának alapvető feltétele, hogy legyen elegendő vonóerő az ellenállások leküzdésére. Vagyis a jármű vezetése közben a vezető ehhez igényli a megfelelő vonóerőt. Az igény teljesítéséhez két további feltétel teljesülése szükséges: elegendő nagyságú motornyomaték a kerék és útfelület kapcsolata lehetővé tegye a szükséges vonóerő kifejtését. Tehát teljesülni kell a következő egyenlőtlenségnek:
 δ a jármű forgó tömegeit figyelembe vevő tényező, miután a gyorsítás esetén nem csak a jármű tömege jelent tehetetlenségi ellenállást, hanem a jármű forgó tömegeit is")
14 ahol: F i igényelt vonóerő F x a talajra a menetirányban átadható tapadási erő A talaj síkjában kifejthető hossz- és keresztirányú erő a kerékre ható leszorító erőtől és az útfelület közötti tapadási viszonyoktól függ. A közúti járműveknél a kerék tapadásáról, ennek megfelelően tapadási tényezőről beszélünk. A kerék és az útfelület között bonyolult a kapcsolat: van nyugvó súrlódás lehet csúszósúrlódás fellép erőzárás és alakzárás is a gumiabroncs egyes elemi csúsznak, más elemei elakadnak az útfelület bordáiban a gumiabroncs és az útfelület közé harmadik anyag: sár, víz, hó, jég kerülhet. A kapcsolat minőségét kifejező tapadási tényező ezért széles intervallumban változhat

15 Például: száraz beton, aszfalt úton φ=0,9-0,95 kockaköves úton φ=0,6-0,7 jeges úton φ=0,1-0,2 Vizes úton előfordulhat, hogy a kerék nem tudja megtörni és kiszorítani a vízréteget, a kerék felúszik a vízfelületre: ez az aquaplanning jelenség, ilyenkor a tapadás szinte teljesen megszűnik. De a tapadási tényező még konkrét útviszonyok mellett is változhat a kerék és a talaj közötti relatív sebességkülönbségtől, a sliptől függően. A slip értelmezése hajtott kerék esetén: fékezett kerék esetén: ahol: v k a kerék kerületi sebessége v gk a gépjármű sebessége Ha a jármű gyorsításakor a vonóerő meghaladja a tapadási erőt, vagyis

16 a kerék kipörög, a jármű nem indul el, ekkor v gk =0 és s H =1. Ennek elkerülésére szolgál az ASR (Anti Slip Regierung), kipörgésgátló nyomatékszabályozó rendszer. A kerék túlfékezésekor a kerék megáll (blokkol) v k =0 és s F =1. Ezt a folyamatot akadályozza meg az ABS (Antiblokk System) fékező szabályzó rendszer. A hosszdinamikai elemzés folytatásához feltételezzük, hogy a jármű gyorsuló mozgásához szükséges vonóerő kifejthető a kerék és útfelület közötti tapadás révén. Így a mozgásegyenlet felírható: Részleges átalakítást végezve: A tényező kifejezi az útfelület tapadási viszonyait és a lejtő emelkedő meredekségét, ezért útellenállási tényezőnek nevezzük. A hosszdinamikai mozgásegyenlet tehát: Ez az egyenlet a jármű által megtett útra vonatkoztatva másodrendű, másodfokú változó együtthatós, inhomogén differenciálegyenlet. Megoldása történhet: közelítő számítással, számítógépes modellezéssel grafikusan az úgynevezett vonóerődiagram segítségével. A vonóerődiagram a jármű sebessége függvényében ábrázolja a vonóerőt és az ellenállásokat

17 v 2 sebesség esetén egymásból kivonva Vagyis ha vonóerő feleslegünk van, a jármű tud gyorsítani, legyőzve a tömegellenállásokat is. A pillanatnyi gyorsulás: Ha nem akarunk gyorsulni, akkor csökkenteni kell a vonóerőt értékig. Ez történhet gázelvétellel vagy a sebességváltó magasabb fokozatba kapcsolásával. v 4 sebesség esetén

18 vonóerőhiány lép fel, a jármű lassul Ha nem akarunk lassulni, akkor a vonóerő hiányt meg kell szüntetni vagy gázadással, vagy alacsonyabb sebességi fokozatba való kapcsolással. v 1 sebesség esetén: a jármű sebessége állandó. Ha az útellenállás kismértékben csökken (csökken a lejtőszög), már vonóerő felesleg lép fel, a jármű gázadás nélkül is gyorsulni kezd egészen a v 3 sebességig. Ha az útellenállás kismértékben növekszik (nő a lejtőszög), vonóerő hiány keletkezik, gázadás vagy sebességváltás nélkül a jármű lassul, és megáll. Tehát a v 1 sebességnél a jármű kis ellenállás változásra is nagy sebességváltozással (Δv 1 ) reagál, vagyis itt a jármű haladása instabil. v 3 sebesség esetén: a jármű sebessége állandó. Ha az útellenállás kismértékben csökken, vonóerő felesleg lép fel, a jármű gázadás nélkül gyorsulni kezd, de csak kissé. Az útellenállás kismértékű növekedésével a vonóerő hiány miatt a jármű kissé lassul. Tehát a v 3 sebességnél a jármű kis ellenállás változásra kis sebességváltozással (Δv 3 ) reagál, vagyis itt a jármű mozgásállapota stabilnak nevezhető. Az instabil és a stabil mozgásállapot határát az a sebesség határozza meg, amikor a mozgásegyenletnek csak egy megoldása van. A vonóerő diagramon ez a pont az F w + F Ψ ellenállásgörbe és az F vonóerőgörbe érintője. Ez a gyakorlatban úgy valósul meg, hogy az emelkedő egyre meredekebb lesz, a jármű egyre lassul, és egy adott sebességnél a jármű mozgása instabillá válik, rángatni kezd. Ez a sebességváltó visszaváltásának utolsó pillanata. A v v sebességet váltási sebességnek nevezzük. Visszaváltáskor megváltoztatjuk a sebességváltó áttételét, aminek következtében a vonóerő megnő, de a sebességtartománya csökken. Az i. fokozatban a vonóerő nagysága A jármű sebességtartománya
, vonóerő hiány keletkezik, gázadás vagy sebességváltás nélkül a jármű lassul, és megáll.")
19 ahol n m a motor fordulatszáma (f/sec) Visszaváltáskor a vonóerő növekszik a sebességtartomány csökken Például: egy gépjármű harmadik fokozatának áttétele k 3 =2, a második fokozatának áttétele k 2 =3 ekkor A járműre vonatkozó teljes vonóerődiagram a sebességváltó fokozatokkal egyenlő számú vonóerőgörbét tartalmaz. A menetközben fellépő ellenállások ismeretében meghatározható a bekapcsolandó fokozat és meghatározható a jármű maximális emelkedő mászó képessége

20 A jármű hosszdinamikai egyenletéből meghatározható a mozgás dinamikája. Például a sebesség-idő vagy gyorsulás-idő karakterisztikák. Az eddigiekből levonható következtetés, hogy a belsőégésű motoros járműveknél a sebességváltó alkalmazása ezen motorok kedvezőtlen külső nyomatéki és teljesítmény görbéje miatt szükséges. Az ideális erőgép karakterisztika:

21 Ilyen karakterisztikát az elektromos autók speciális villanymotorjaival lehetmegközelíteni. 2.3 Differenciálmű Differenciálmű = kiegyenlítőmű Feladata: a) A meghajtott (forgatott) kerekek közötti fordulatszám kiegyenlítés kanyarodás közben a két kerék esetleg eltérő gördülő sugara (Rg) (pl. különböző levegőnyomás esetén). b) A meghatott kerekek közötti nyomaték elosztása Fordulatszám kiegyenlítés A kerekek kerületi sebessége a jármű Ω elfordulási szögsebességéből meghatározható. Ugyanekkor a kerekek kerületi sebessége a fordulatszámukkal arányos
22 ahol: R g a kerék gördülő sugara (m) n i a kerék fordulatszáma (f/perc) ha a kerekek gördülési sugarai azonosak, akkor a következő arányok írhatóak fel: A két tengely közötti arány: Amennyiben a fenti összefüggések szerinti számításokat a jármű sebességmutatója általa jelzett sebességből kiindulva kell elvégezni, akkor a mutatott sebességet (v) a hátsó tengely középpontjának sebességével (v h ) azonosnak vehetjük: Differenciálmű konstrukciók: A fordulatszám kiegyenlítés é s a nyomatékelosztás konkrét formája és paramétere a különböző szerkezeti megoldású differenciálműveknél eltérően valósul meg. Ezért tekintsük át a gépjárművekben használatos differenciálmű konstrukciókat! - hidraulikus differenciálművek - elektromos differenciálművek
23 A gépjárművekben leggyakrabban használatos a kúpfogaskerekes bolygóműves differenciálmű. Kinematikai vázlata: A szerkezeti alkatrészek megnevezése: 1. kerék 2. féltengely 3. rózsakerék 4. bolygókerék 5. bolygókerekek háza 6. meghajtó kúpkerék 7. tányérkerék 8. kardántengely Mechanikai jellemzők: M 1 a gyorsabban forgó kerékre ható nyomaték (Nm) n 1 a gyorsabban forgó kerék fordulatszáma (f/perc) M 2 a lassabban forgó kerékre ható nyomaték (Nm) n 2 a lassabban forgó kerék fordulatszáma (f/perc) M a bolygókerekek házára ható nyomaték (Nm) n - a bolygókerekek házának fordulatszáma (f/perc)
24 M s a differenciálmű súrlódási nyomatéka (Nm) k o a tányér és a kúpkerék áttétele M m a motor nyomatéka (Nm) k s a sebességváltó bekapcsolt fokozatának áttétele R g a kerekek gördülő sugara (m) Kúpkerekes bolygóműves differenciálmű fordulatszám összefüggései: A legjellemzőbb összefüggések a különböző fordulatszámok között: ha akkor ha akkor ha akkor Kúpkerekes bolygóműves differenciálmű nyomaték elosztása: Ha a differenciálmű teljesen súrlódásmentes, akkor Valóságban mindig van súrlódás, a szabályozott differenciálművek éppen a belső súrlódás variálásával változtatják a nyomatékelosztás arányait. gyakran használatos fogalmak: Az önzárási tényező: a kerekek közötti fajlagos nyomatékkülönbség Az önzárási tényezővel kifejezve a nyomatékok: A nyomatékelosztási tényező:
25 2.3.5 A differenciálművek jellemző dinamikai hatása: A differenciálművek nyomatékelosztó szerepének különösen kétféle üzemeltetési állapotban van kiemelt jelentősége: A) eset: A jármű jó úton nagy sebességgel kanyarodik, a belső oldali hajtott kerék elemelkedik az útfelületről. B) eset: A jármű csúszós úton, terepen halad, a hajtott kerekek kipöröghetnek. A) eset elemzése: kezdeti feltételek: tapadásra: φ 1 =φ 2 =φ kerékterhelésre: Z 1 =0; Z 2 =G t gördülő sugárra: R g1 =R g2 =R g bemenő nyomatékra: M=M m k s k o keréknyomatékokra: M 1 =0 kérdés: M 2 =? A/1 variáció: Súrlódásmentes differenciálmű: Tehát a felemelkedő kerék kipörög, ott a nyomaték elszökik, a másik kerék nem kap nyomatékot. Ezért nem lehet a differenciálmű súrlódásmentes. A/2 variáció: A differenciálmű megnövelt belső súrlódású:
26 de mivel így Ha például K=1, akkor az egész motornyomaték átmehet az útfelületen maradt kerékre, de ez a nyomaték csak a kerék és az útfelület közötti tapadási erő nagyságáig eredményezhet vonóerőt, azon túl már ez a kerék is kipörög. Az útra levihető maximális nyomaték tehát érvényesülni kell az alábbi feltételnek: B) eset elemzése: kezdeti feltételek: tapadásra: φ 1 <φ 2 kerékterhelésre: Z 1 =Z 2 =G t /2 gördülő ellenállásra: R g1 =R g2 =R g B/1 variáció: Súrlódásmentes differenciálmű esetén: Az útfelületnek átadható nyomaték de a K=0 önzárási tényezőből adódóan Tehát a kisebb tapadási tényező határozza meg a kifejthető nyomatékot
27 B/2 variáció: Mekkora legyen az önzárási tényező, ha mindkét keréken ki akarjuk fejteni a tapadás biztosította maximális nyomatékot? de a kezdeti feltételeket figyelembe véve: és az önzárási tényező B/3 variáció: Adott önzárási tényező esetén mekkora nyomatékot tudunk levinni a talajra? A nyomatékelosztási tényező de a kipörgés (megcsúszás) miatt Tehát a kerekek kipörgése határolja a talajra levihető maximális nyomatékot. 3 Fékrendszer 3.1 A fékrendszer feladata lassítani a járművet megállítani a járművet rögzíteni az álló járművet elősegíteni a jármű menetstabilitását (ESP funkció) A fékrendszer a járműalkotórészek közül a leginkább befolyásolja a jármű stabilitását menetközben és álló helyzetben egyaránt. Vagyis a közúti járművek legbiztonságkritikusabb rendszere
28 A közúti járművek biztonságával legszorosabban összefüggő műszaki témákban nemzetközi szintű egyeztetés, összehangolás alakult ki. Az ENSZ keretén belül egy önálló nemzetközi bizottság (elterjedt nevén Bécsi Bizottság) foglalkozik ezzel a szakterülettel. Határozatait irányelvek, állásfoglalások formájában adja közre, majd az ENSZ tagállamok döntik el, hogy azokból nemzetközi szabványok (ezek az ISO szabványok) vagy nemzeti szabványok vagy jogszabályok (törvények, rendeletek, stb.) formájában érvényesülnek. Ezek az ECE jelű, magyarul ENSZ EGB határozatok. A közúti járművek fékrendszerére az ECE (ENSZ EGB) 13. határozata vonatkozik. Hazánkban ezek az előírások szakminiszteri rendeletekben jelennek meg. Pl. 5/1990 (IV.12.) KÖHÉM és a 6/1990 (IV.12.) KÖHÉM rendeletekben és azok későbbi kiegészítéseiben. A közúti járművek lassítására konkrét előírások vannak, amelyek a különböző járműfajtákra meghatározzák a lassulás (a F ) konkrét értékeit. Például: személygépkocsik esetén a F =5,8 m/sec 2 tehergépkocsiknál a F =5,0 m/sec 2 Az álló jármű rögzítésére előírt értékek: szóló járművet stabilan kell rögzíteni a fékrendszernek egy 18%-os lejtőn pótkocsis járműszerelvénynél 12%-os lejtőn Az előírások kiterjednek a fékrendszert működtető erőszükségletre is. lábműködtetés esetén max. 500N kézi működtetés esetén max. 400N
29 Az ENSZ EGB 13. előírás szerint a közúti járművekbe különböző üzemeltetésű fékeket kell beszerelni: Üzemi fék Ez a jármű menetközbeni lassítására, megállítására szolgál. Az üzemi féknek kétkörös rendszerűnek kell lennie, egy kör meghibásodása esetén a másik kör még alkalmas a jármű lassítására. Személygépkocsiknál korábban a két fékkör így épült fel: 1. fékkör: első kerekek 2. fékkör: hátsó kerekek A korszerű személygépkocsiknál 1. fékkör: jobb első kerék + bal hátsó kerék 2. fékkör: bal első kerék + jobb hátsó kerék (vagyis keresztkötés) Biztonsági fék Az üzemi fék kiesése, meghibásodása esetén még rendelkezésre álljon egy tartalék fék. Az érvényben lévő a kétkörös üzemi fékrendszer esetén nem szükséges a járműbe biztonsági féket szerelni, ha mindkét kör önállóan, egymagában képes a járművet az előírt lassulás felel értékével fékezni, vagyis személygépkocsiknál 2,9 m/sec2, tehergépkocsiknál 2,5 m/sec2 lassulással. Rögzítő fék (Elterjedt megnevezése kézifék) Az álló járművet rögzíti az előírt mértékű lejtőn. A jelenlegi előírások szerint fokozatmentesen szabályozható fékerőt kell szolgáltatnia, ezáltal menet közben is alkalmas a jármű megállítására, tehát még biztonsági, tartalék fékként is használható. Tartós lassító fék (elterjedt elnevezése: retarder) Autóbuszoknál már kötelező, tehergépkocsiknál a közeljövőben írják elő. Az üzemi és a rögzítő fékektől független szerkezet. Feladata az üzemi fékszerkezet kímélése, helyettesítése hosszabb ideig tartó, de kisebb intenzitású fékezés esetén. A lassító fékekre vonatkozó dinamikai követelmény: ha a jármű lefelé elindul egy 7%-os lejtőn, akkor a sebessége a bekapcsolt retarder esetén ne haladja meg a 30 km/h-ás értéket
30 3.2 A fékdinamika alapjai Az ENSZ EGB 13. előírás szerint a jármű fékezésének vizsgálata során elegendő egy egyszerűsített dinamikai modellt alkalmazni, mely szerint a jármű vízszintes, sima úton halad, a járműre csak a fékerő és a tehetetlenségi erő hat, a lassulás egyenletes. Ez az egyszerűsítés a biztonság javára történik, miután a valóságban a járművet fékezi a légellenállás, a gördülési ellenállás és a különböző alkatrészek súrlódása is. Az egyszerűsített modell alapján felírható mozgásegyenlet: ahol: vagyis a fékezéskor kihasználjuk a kerék és az útfelület közötti tapadási erőt. Így az erők egyensúlyából következő mozgásegyenlet A megállásig fékezett járműre vonatkozó energia egyenlet: Tehát a gépjármű mozgási energiáját a fékezés révén fogyasztjuk el, miközben a jármű befutja a fékezés megkezdésétől a jármű megállásáig tartó úgynevezett fékutat (sf). Az energiaegyenlet részletezése:
31 ahol: G a jármű súlyereje (N) g 9,81 m/sec2 v a jármű sebessége a fékezés kezdetekor (m/sec) φ az útra jellemző tapadási tényező s F a fékút (m) A két egyenletből meghatározhatóak az elemi fékmutatók: legnagyobb lassulás: fajlagos lassulás: elemi fékút: fajlagos fékerő: az egész járműre az egyes tengelyekre ahol: Z a tengelyterhelés (N) A fajlagos fékerő és a tapadási tényező között speciális összefüggés van. A tapadás teljes kishasználása mellett, vagyis maximális fékerő esetén az egész járműre felírható vagyis maximális fékezés esetén a fajlagos fékerő azonos a tényleges tapadási tényezővel. De ha csak kisebb lassulást akarunk elérni, akkor kevésbé nyomjuk a fékpedált, nem használjuk ki a teljes tapadást, tehát a kerék és útfelület között kisebb tapadás is elegendő. Vagyis a fékpedál lenyomásakor igénylünk egy adott lassulást, igénylünk egy ahhoz szükséges fékerőt, végezetül igénylünk egy megfelelő tapadási
32 tényezőt. Ebből következően a fajlagos fékerő értéke és az igényelt tapadási tényező összefüggése: Tehát a fajlagos fékerő nem más, mint egy igényelt tapadási tényező, ezt meghatározhatjuk az egész járműre, vagy egy-egy tengelyre is Ezt az összefüggést jól lehet szemléltetni a különböző adhéziós diagramokon. Például a fokozatosan növekvő lassulású fékezés esetére vonatkozó adhéziós diagram Fékerő felosztás tengelyek között A fékdinamikai számítások bonyolult feladata a jármű lassulásához szükséges fékerő (F) felosztása az egyes tengelyek között Ha az egyik tengelyen nagyobb fékerőt akarunk létrehozni, mint amennyit a kerekek tapadása megenged, azaz túlfékezzük a tengelyt, akkor a kerekek megcsúsznak, blokkolnak
33 túlfékezés alulfékezés A kerekek megcsúszása a jármű stabilitásának elvesztését jelentheti. A stabilitásra vonatkozó gyakorlati axióma: amelyik kerék megcsúszik, az előre igyekszik. A korszerű fékrendszereknél használatos ABS szabályzás ezért a kerekek megcsúszását akadályozza meg. De ABS esetén is arra kell törekedni, hogy a tengelyek közötti fékerő elosztás optimális legyen, vagyis minden tengelynél azonos legyen a fajlagos fékerő, vagyis az igényelt tapadási tényező. Ez csak akkor valósítható meg, ha a fékerő felosztást szabályzó eszközt is tartalmaz a fékrendszer. A jármű stabilitásának megőrzése érdekében a szabályozási követelmény kiegészül: vagyis az első tengely fajlagos fékereje (lefékezettsége) vagy egyenlő legyen a hársó tengelyével, vagy annál nagyobb legyen. A feladat megoldásának bonyolultságát az okozza, hogy a fékezett jármű tengelyterhelése a lassulás intenzitásától függően állandóan változnak. Álló helyzetben a tengelyterhelések statikus értékei méréssel, vagy egyszerű számítással meghatározhatóak. ahol: l 1 a jármű súlypontjának távolsága az első tengelytől (m) l 2 a súlypont távolsága a hátsó tengelytől (m) L a jármű tengelytávja (m) A fékezett jármű esetén fellép a súlypontba koncentrálható tehetetlenségi erő, és módosítja a tengelyterheléseket. A dinamikus tengelyterhelések: ahol: - a tehetetlenségi erő (N) h a súlypont magassága
34 A két tengelyen létrehozható fékerők arányát fékerő felosztási tényezőnek nevezzük A dinamikus tengelyterhelésekre vonatkozó összefüggések felhasználásával: A képletek azt mutatják, hogy a fékerő felosztást befolyásolják a jármű súlypontjának koordinátái, a lassulás mértéke és a tapadási tényező. Ezek a jellemzők a jármű üzemeltetése során széles intervallumban és véletlenszerűen változhatnak. Változik a jármű gördülő tömege, ezáltal a súlypontjának helyzete, változó a fékezés intenzitása, változnak az útviszonyok. Ebből következően a fékerő felosztás arányát állandóan változtatni kellene, ezt viszont csak speciális fékerő szabályzó, fékerő módosító berendezéssel lehet megvalósítani. A fékerőfelosztás vizsgálatához, tervezéséhez szemléletes segédeszköz az egész járműre vonatkozó adhéziós diagram, amelyik a fékezés intenzitása, a tengelyenkénti fajlagos fékerők, az igényelt és tényleges tapadási tényezők összefüggéseit ábrázolja
35 A diagramból kitűnik, hogy a két tengelynek csak a z* fajlagos lassulás esetén azonos a fajlagos fékereje, vagyis a lefékezettsége. A z* mértékénél kisebb lassulás esetén az első tengely, míg a nagyobb lassulás esetén a hátsó tengely fajlagos fékereje és ebből következően az igényelt tapadási tényező a nagyobb. A z 1 fajlagos lassulás esetén egyik tengely sincs túlfékezve, vagyis egyik tengely kerekei sem csúsznak meg, ha a tényleges tapadási tényező φ t1 nagyságú. Ha viszont a tapadási tényező lecsökken φ t2 értékre, akkor az első kerekek megcsúsznak, de a hátsók nem blokkolnak, tehát a jármű nem veszti el a menetstabilitását. A z 2 fajlagos lassulás esetén a φ t1 tényleges tapadási tényező mellett a hátsó tengely túlfékezett, a hátsó kerekek megcsúsznak, a jármű elveszti menetstabilitását (kifarol, megpördül). A φ t2 tényleges tapadási tényező esetén a előbb a hátsó, majd az első kerekek is blokkolnak. Ez is stabilitásvesztéshez vezet. Ebből az elemzésből kitűnik, hogy a z* kritikus fajlagos lassulási érték, nála kisebb lassulás esetén a jármű stabilan fékezhető, viszont nagyobb lassulás esetén a jármű elveszti stabilitását. A z* értékét az ENSZ EGB előírás kötelezően meghatározza. személyszállító járművek esetén z*=0,8 minden más közúti járműnél z*=0,3 3.3 A fékrendszer szerkezeti felépítése A közúti járművek fékrendszerét szerkezetileg két alrendszerre lehet bontani: a kerék talppontjában fellépő fékerőt létrehozó szerkezetek a fékrendszert működtető berendezések A kerékfékerőt létrehozó szerkezet lehet: mechanikus, súrlódásos, melynek két jellemző konstrukciója használatos: - dobfék - tárcsafék hidrodinamikus, munkagépek jellemző konstrukciója elektromos, villanyautókon alkalmazzák
36 A fékhenger rögzítő csavarok B féktartó C biztosítólemez D fékbetét E porvédő F tömítőgyűrű G dugattyú H fékhenger J fékpofa A lefutó fékpofa B utánállító C - rugó D - fékmunkahenger E - féklemez F- -tartócsap G felfutó fékpofa H - nyomórugó J - rugótányér K - húzórugó L visszahúzó rugó M visszahúzó rugó
37 A fékrendszert működtető szerkezetek típusai: hidraulikus rendszer Pedállal működtetett főfékhenger, csővezetékek, fékerő szabályozó elemek, fékmunkahengerek alkotják. Elsősorban személygépkocsiknál használatos. pneumatikus rendszer (légfék) Kompresszor, levegő előkészítő elemek, tartályok, védő-, szabályzó szelepek, membrános munkakamrák, rugóerőtárolós fékhengerek alkotják elemeit. Autóbuszok, teherautók leggyakoribb fékműködtető rendszere. elektromechanikus rendszer A kerékfékszerkezetben kifejtendő működtető erőt elektromágnes vagy léptető villanymotor hozza létre. Elsősorban kisebb személygépkocsikban alkalmazzák. mechanikus működtető rendszer Pedállal, kézifékkarral, bowdennel, áttételes kulcsokkal, vonóékekkel működteti a kerékfékszerkezet súrlódó elemeit. Személygépkocsik rögzítő fékrendszerében, motorkerékpároknál, vonógömbös utánfutó pótkocsiknál használatos. Az autóbuszok, teherautók lassító tartós fékrendszerének jellemző konstrukciói: Kipufogófék A jármű kipufogócső rendszerébe beépített pillangószelep elzárásakor és a tüzelőanyag adagolás megszüntetésekor az erőátviteli rendszeren keresztül a motor ellenállása fékezi a meghajtott kerekeket. Korábban teherautóknál alkalmazták, kevésbé hatásos. Hidrodinamikus retarder A jármű erőátviteli rendszere és a kocsitest megfelelő eleme közé beépített hidrodinamikus tengelykapcsoló folyadékkal telve fejti ki a fékező hatást, amely a folyadék leürítésével szüntethető meg. A munkafolyadék lehet hidraulika olaj, vagy a motor hűtővize. Elektromos örvényáramú retarder A jármű erőátviteli rendszerébe épített villamos gép bekapcsolva fejti ki a lassító fékhatást. A fékezés során termelt villamos energia felhasználható az akkumulátorok töltéséhez is. A legkorszerűbb lassítófék rendszer
38 4 Kormányrendszer 4.1 A közúti járművek kormányzásával szembeni általános követelmények A közúti járművek kormányzásának az alábbi általános követelményeknek kell megfelelnie: Kanyarodás közben a kormányzott kerekek oldalirányú csúszás nélkül gördüljenek. A jobbra és balra kormányzás szimmetrikus legyen: a) mindkét irányban az elkormányzási szögek maximális értékei azonosak legyenek; b) a kormányáttétel szimmetrikus legyen; c) az elkormányzási nyomaték szimmetrikus legyen. A kormánykerék kerületén kifejtett erő ne haladja meg a 150 N értéket, Szervokormányos járműveknél a szervrendszer meghibásodása esetén a 400 N értéket. Az elkormányozás szögével arányosan növekedjen a kormányzási nyomaték. Kanyarodás közben a jármű vagy a járműszerelvény meghatározott szélességű folyosón belül haladjon. Az egyenes menetirányból elkanyarodó jármű farseprése megadott értéken belül maradjon. 4.2 A járművek kormányzásának alaptípusai A közúti járműveken a kormányzás alábbi típusai fordulnak elő: a) tengelykormányzás (pótkocsikon) b) tengelycsonk kormányzás (Ackermann féle kormányzás, gépjárműveken) c) alvázkormányzás (ízelt járművek esetén: vontatók, munkagépek) 4.3 A kormányzás általános geometriája Mindhárom alaptípusú kormányzás esetén az alábbi általános geometriai jellemzők vizsgálhatók: kerekek elkormányzási szögei (α, β) a kormányzott tengelyre vonatkozó elkormányzási szög (Θ) a kormánykerék elfordítási szöge (β L ) kanyarodási sugár (R) legkisebb kanyarodási sugár (ρ) külső fordulási sugár (R K ) belső fordulási sugár (R B ) tengelytáv (L)
39 nyomtáv (B) kormánytrapéz bázistávolsága (b) kanyarodási folyosószélesség (s f ) farseprés szélessége 4.4 A kormányrendszerek geometriája Tengelykormányzás tg tg tg L R R L tg Ezt a kormányzási rendszert az úgynevezett vonóháromszöges pótkocsiknál ma is használják. A tengely elfordulását golyós koszorú teszi lehetővé
40 4.4.2 Alvázkormányzás Ez a kormányrendszer elsősorban mobil munkagépeknél, vontatóknál fordul elő. Gépkocsikon nem alkalmazható
41 4.4.3 Tengelycsonk kormányzása:
42 A tengelycsonk vagy Ackermann - kormányzás a gépkocsikhoz általánosan használatos kormányrendszer, de egyes speciális pótkocsikon is alkalmazzák. Különösen előnyös több pótkocsiból álló szerelvények esetén a kedvező nyomkövetés elérése érdekében. 4.5 A közúti járművek fordulási tulajdonságára vonatkozó fontosabb előírások Kanyarodási folyosószélesség R k =12,5 m R b 5,3 m Különösen fontos előírás ez a pótkocsis szerelvényekre és a csuklós autóbuszokra
43 4.5.2 Farseprés szélessége: max. 0,8 m; csuklós autóbusz max. 1,2 m Álló jármű teljesen alákormányozva elindul és meghatározzák a hátsó külső pont által leírt pályát, melynek az egyenes haladási iránytól való maximális eltérése a farseprés jellemző értéke. A csuklós autóbuszok esetén a 0,8 m értéknél nagyobb, de a megengedett maximális 1,2 m értéken belüli farseprést a jármű hátsó felületén jelezni kell. Például: 1 m
44 4.6 A kanyarodó jármű dinamikus mozgásviszonyai A gumiabroncs oldalirányú rugalmassága alapvetően befolyásolja a kormányzás geometriáját: a gumiabroncs ferdefutási tulajdonsága annak jellemző paraméterei; a rugalmas gumiabroncsú jármű kanyarodási geometriája a járművek kormányzottsági tulajdonsága: a) túlkormányzottság; b) alulkormányzottság; c) neutrális kormányzottság A gumiabroncs ferdefutási tulajdonsága és jellemző paraméterei: Kerék gördülése oldalerő nélkül. Kerék gördülése oldalerővel
45 A rugalmas gumiabronccsal rendelkező kerék oldalerő hatására képes a saját síkjával szöget bezáróan oldalazva gördülni. Ezt az oldalazó haladást akkor nevezzük ferde futásnak, ha a kerék gördülése közben a gumiabroncs felfekvő felülete nem csúszik meg oldalra. Így a δ szöggel határolt ferdefutási tartomány egy biztonsági zónát jelent, amelyen belül nincs oldalcsúszás, így a hossz - és keresztirányú tapadás alig változik. A δ szög egy adott gumiabroncsra, annak beépítési és működési körülményeire vonatkoztatható. Nagyságát befolyásolja a gumiabroncs mérete, mintázata, anyaga, szövetvázának szerkezete, felületi hőmérséklete, kerék függőleges és oldalirányú terhelése, a jármű sebessége, az útfelület minősége, szennyezettsége, nedvessége, az út felületi hőmérséklete. Az oldalcsúszás nélküli δ ferdefutási szöget a szakirodalom gyakran a kerék saját ferdefutási szögének nevezi. Ezzel szemben megkülönbözteti az úgynevezett kikényszerített ferdefutási szöget, melyet általában α-val jelöl. A kikényszerített ferdefutás leginkább a kerék dőléséből, összetartásából, széttartásából, nyomtáv megváltozásából, hibás kormánygeometriából adódik. A két szög egymáshoz mért nagysága alapvetően befolyásolja a gumiabroncs kopását, és a jármű menetstabilitását. Ha a kikényszerített ferdefutási szög (α) kisebb a kerék oldalcsúszás nélküli saját ferdefelületi szögnél (δ), akkor a gumiabroncs kiegyenlíti a kerék ferdefutását (oldalazását) előidéző okot. A gumiabroncs felfekvő felülete nem csúszik oldalra (nem radíroz), a kerék továbbra is felveszi a hossz és keresztirányú erőket (vonóerő, fékerő, centrifugális erő), a jármű haladása stabil marad, a gumiabroncs nem kopik rendellenesen (fűrészfogasan). Ezzel szemben, ha különböző műszaki okokból (leginkább kompromisszumokból) összeadódó, kikényszerített ferdefutású szög (α) nagyobb a kerék saját ferdefutású szögénél (δ), akkor a kerék oldalra megcsúszik, aminek a következtében gumikopás lép fel, a kerék által a felvehető hossz és keresztirányú erők hirtelen lecsökkennek, a jármű elvesztheti a stabilitását. Ez különösen a kanyarodás közbeni fékezéskor lehet veszélyes mértékű. Az utóbbi időben egyes korszerű gépkocsiknál is jelentkező gumikopások, nagyrészt erre az egyenlőtlenségre vezethetőek vissza
 R tg 2 R tg( L ) 1 tg 2 R")
46 4.6.2 A rugalmas gumiabroncsú jármű kanyarodási geometriája: L a b R tg ( 1 ) R tg 2 R tg( L ) 1 tg 2 R L
47 Kanyarodás közben a gumiabroncsok a centrifugális erő hatására δ i szögekkel ferdén futnak, de még nem csúsznak meg oldalirányban. A kerekek ferde futásának eredményeként a jármű oldalirányba kúszik, kerekek oldalcsúszása nélkül. Ezen kritérium teljesülése esetén nevezhetjük ezt a jelenséget a jármű sajátkormányzási viselkedésének. A kerekek ferdefutásából adódóan kialakulnak az első és hátsó futóművek eredő ferdefutási (oldalkúszási) szögei, vagyis a futóművek tényleges sebességvektorainak irányai eltérnek a kormánykerék elfordításából következő eredeti irányoktól, ezáltal a kanyarodás középpontja eltolódik, a kanyarodás sugara megváltozik. Úgy tűnik, mintha a jármű saját magát elkormányozná, miközben a kormánykerék elfordítási pozíciója, és így a kerekek elkormányzási szögei változatlanok maradnak. Attól, függően, hogy a jármű saját kormányázási viselkedése következtében a kanyarodás sugara hogyan változik, jellemezhetjük a jármű saját kormányzási tulajdonságát az alábbiak szerint: 1.) alulkormányzott, mert δ 1 > δ 2, amiből következik, hogy R > R 0 (kiegyenesíti a kanyart) 2.) túlkormányozott, mert δ 1 < δ 2, amiből következik, hogy R < R 0 (sodródik a hátulja, behúz a kanyarba) 3.) semleges (neutrális), mert δ 1 = δ 2, amiből következik, hogy R = R 0 (íven haladó). A jármű vezethetősége szempontjából kedvező a semleges vagy az alulkormányzott. kedvezőtlen a túlkormányzott sajátkormányzású jármű
48 4.7 A kormányrendszer szerkezeti felépítése, jellemző típusok Az ENSZ-EGB közlekedésbiztonsági előírásai szigorúan meghatározzák a közúti járművek kormányzásának műszaki jellemzőit. Ezek közül a legfontosabb előírás szerint a gépkocsiknál a kormánykerék és a kormányzott kerekek között mechanikus kapcsolatnak kell lenni. Ezt a mechanizmust különösen bonyolulttá teszi az a menetstabilitási követelmény, mely szerint a kerekeknek a jármű felépítményéhez viszonyított mozgásakor (ki-berugózáskor, kanyarodás közbeni oldalbillenéskor, fékezés vagy gyorsítás közbeni bólintáskor stb.) kerekeknek nem szabad elkormányzódni. A mechanizmus hibájából adódó elkormányzódás különösen kedvezőtlen a merevhidas futóműveknél, miután a kormányrudazat kialakításából következően az elkormányzódás azonos irányú a két keréken, ami a jármű sétálásához, sávváltásához vezethet. Független felfüggesztésű futóműveknél az elkormányzódás két keréken ellentétes, ami ugyan a jármű iránytartását nem befolyásolja, de gumikopást, a tapadási erők csökkentését eredményezheti. Egyes korszerű járműveknél gyakran jól megtervezett célfüggvény szerint a kerekek elkormányzódását a ki és berugózás és/vagy erőhatás függvényében lehetővé teszik éppen a jármű stabilitásának növelése érdekében. Az ilyen futóműveket önkormányzott vagy passzív kormányzású futóműveknek nevezik
49 4.7.1 Merevhidas futóművel felszerelt járművek kormányrendszere: A független kerék-felfüggesztésű futóművel felszerelt járművek kormányrendszere:
50 Az ábrán jelzett alkatrészek:
51 1. fékalaplemez 2. függő csapszeg 3. trapézkar 4. merev híd 5. tengelycsonk 6. nyomtávrúd 7. irányzó kar 8. tolórúd 9. kormánygép lengőkar 10. kormánygép 11. kormánykerék tengely 12. kormánykerék 13. összekötő rúd 14. segédirányzó kar 15. kerékösszetartást állító csavar. 5 A közúti járművek futóművei 5.1 Futómű általános szerkezeti felépítése Futóművek elemcsoportjai és alkatrészei (jelölések az ábráknak megfelelően): Kerék: 1. gumiabroncs; 2. kerékpánt; 3. keréktárcsa; 4. kerékagy; 5. kerékcsavarok; 6. kerékcsapágyak; 7. tengely, tengelycsonk; 8. dísztárcsa. Kerékfelfüggesztés: 9. rudak; 10. lengőkarok; 11. csuklók; 12. gumiperselyek

52 Rugózás: 13. rugók; 14. lengéscsillapítók; 15. stabilizátorok; 16. mozgáshatároló rugalmas elemek. A futóművek elemcsoportjai és alkatrészei:
53 5.2 Futóművek általános feladatai A futóműveknek az alábbi funkciókat, illetve feladatokat kell ellátni: Közvetíteni az erőhatásokat az út és a jármű között kellő tapadási képességgel kell rendelkezni hossz - és keresztirányban maximális dinamikus kerék - ill. tengelyterhelést kell szolgáltatni Megfelelő lengéskényelmet nyújtani az utasok, illetve az áruk számára optimális önlengési jellemzőkkel kell rendelkezni, a felépítmény önlengésszáma 60 lengés/perc körüli legyen megfelelő lengésátviteli karakterisztikája legyen Csökkenteni a járműalkatrészek dinamikus igénybevételét Aktívan elősegíteni a jármű menetstabilitását fékezéskor kedvezően befolyásolni a jármű irányítását kanyarodáskor önkormányzással csökkenteni a jármű sodródását 5.3 Futóművek aktivitása, önszabályozása A gépjárművek menetstabilitását a különböző futóműparaméterek megfelelő szabályozásával lehet növelni. A szabályozás történhet: számítógépes külső szabályozással; önszabályozással (pl. intelligens futóművek). A számítógépes külső szabályozós futóművek jelenleg még fejlesztés alatt állnak, szélesebb körű alkalmazásukat egyelőre műszaki, jogi és gazdasági problémák akadályozzák. Az intelligens futóműveknél a megfelelő paraméterek szabályozása történhet: elmozdulás szabályozással; erőszabályozással; integrált szabályozással. Az önszabályozás megvalósítható különböző hosszirányú (R) és beépítési szögű (κ) lengő rudakkal, lengő karokkal és nagy térfogatú önbeálló gumiágyazásokkal (elasztométerekkel)
54 5.4 A futóművek geometriai jellemzői, paraméterei A futóművek vizsgálatakor, minősítésekor használatos geometriai jellemzők, paraméterek: A) Alap paraméterek: Kerékdőlés (γ), Kerékösszetartás (ν,α ν ), Csapterpesztés (δ), Csaphátradőlés (ε), Utánfutás (n a ), Kormánylegördülési sugár (R 0 ), Nyomtáv (B), Tengelytáv (L). B) Leszármaztatott paraméterek: Billenési momentán centrum, Momentán tengely, Bólintási centrum, Kerékdőlés változás, Összetartásváltozás, Nyomtávváltozás. Az alapparamétereket statikus paramétereknek, néha nullgeometriának is nevezik, mivel ezeket a jármű álló helyzetében lehet megmérni, beállítani. A leszármaztatott paramétereket dinamikus paraméterként is említi a szakirodalom
55 5.4.1 Alapparaméterek: Kerékdőlés (γ): A kerékdőlés a korszerű gépjárműveknél a legfontosabb, egyben sok vitát kiváltó paraméter. A nagyobb teljesítményű személygépkocsiknál és valamennyi versenyautónál negatív értékek jellemzőek. Más a követelmény a kerékdőléssel szemben kanyarodáskor és egyenes haladáskor. Kanyarodás közben a külső keréknek a keresztirányú álterhelődés következtében megnő a függőleges terhelése, vagyis dominánssá válik. A negatív dőlésszögű külső kerék így a nagyobb leszorító erő és a negatív dőlésszög miatt nagyobb oldalerőt képes felvenni, akár két -, háromszorost is. A belső oldali kerék is negatív szögű a kocsitesthez viszonyítva, de a kerék teteje kifelé dől a kanyarodás középpontjához viszonyítva, így az oldalerő felvétel szempontjából pozitívszögűnek minősül, ami kedvezőtlen a jármű kanyarstabilitására. A korszerű, intelligensnek nevezhető futóműveknél ezért elsődleges szabályozási cél a belső kerekek dőlésszögének változtatása a kocsitesthez viszonyítva pozitív irányba, vagyis a kerék tetejét a kanyar középpontja felé dönteni. A meghatározott célfüggvény szerinti kerékdőlés szabályozását a kocsitest billenésére és az oldalerő növekedésére reagáló felfüggesztési rendszerrel lehet megvalósítani
56 Korszerű személygépkocsiknál az első futómű kerékdőlési szöge 0 - (-0,5 ) közötti, a hátsó futóművé (-1 ) (-2 ) közti értékű. Általános követelmény, hogy egy futóművön a két keréknek azonos legyenek a kerékdőlési szöge, már 0,1 0,2 eltérés esetén a jármű félrehúz. Pozitív kerékdőlés: oldalerők Negatív kerékdőlés: oldalerők
57 Kerékösszetartás: v B 2 B 1 ( mm) v B 2 2D B 1 ( radián) v v 2D 180 ( fok) α v = összetartási szög egy kerékre vonatkoztatva. A korszerű személygépkocsiknál a kerékösszetartás értékei nagy szórást mutatnak. Az első futóműnél általánosan 0-0,5, a hátsó futóműnél 0,5-1 a leggyakoribb érték. Az alapösszetartás ugyanis számos tényezőtől függ így többek között a kerékdőléstől, a

58 kerékdőlés elkormányzás közbeni változásától, a nyomtáv változásától, a hajtásrendszertől az összetartás menetközbeni változtatásától, az úgynevezett csapgeometriáról (ld. később). Az első futóműnél az összetartás a jármű sajátkormányzási tulajdonságát az oldalgyorsulástól függően a túlkormányzás felé változtatja, amíg a hátsó keréknél az alulkormányzás felé. Csapgeometria: A kormányzott kerekek kényszerkormányzáskor vagy önkormányzáskor a függőlegeshez közelálló tengely körül elfordulnak. Ezt a tengelyt nevezzük elkormányzási tengelynek. Ez lehet valós, mint például a merev hidas futóművek függőcsapszegének középvonala (innen ered a csapgeometria, csapterpesztés, csaphátradőlés elnevezés) vagy lehet vi, látszólagos. Az alsó felső gömbcsuklós tengelycsonk esetén a gömbcsuklók középpontját összekötő egyenes az elkormányzás tengelye. A McPherson futóműveknél az alsó gömbcsukló közepét és a támcsapágy deformációs középpontját összekötő egyenes körül fordul el a tengelycsonk. A dupla csuklós futóműveknél (ld. Audi 4-6-8) a tengelycsonk alsó és felső nyúlványai a lengőrudak által meghatározott pillanatnyi középpontok (momentán centrumok) körül fordulnak el. Miután a kerék ki berugózása és a rudakra ható oldalerők következtében a momentán centrumok állandóan változnak, így az elkormányzás tengelye is állandóan változik, vagyis ez a tengely virtuális és momentán. Az elkormányzási tengely dőlésszögei és a keréktalppont (N) és az elkormányzási tengelynek az útfelülettel alkotott dőléspontja (D) közti távolságok alkotják a csapgeometriát. Merev hidas első futómű (Ikarus) elkormányozási tengelye
59 Háromszög-trapéz keresztlengőkaros futómű (Lada) - elkormányozási tengelye McPherson-típusú első futómű (Audi 80) - elkormányozási tengelye
60 Dupla csuklós mellső futómű (Audi A4) - elkormányozási tengelye
61 csapterpesztés (δ) csaphátradőlés (ε) kormánylegördülési sugár (R 0 ) (elkormányzási sugár) utánfutás (n a )
62 Csapterpesztés, kormánylegördülési sugár (elkormányzási sugár) HAGYOMÁNYOS KORSZERŰ
63 Az elkormányzási sugár hatása a jármű menetstabilitására egyenlőtlen fékerők vagy gördülési ellenállások esetén. RÁKORMÁNYZÁS ELLENKORMÁNYZÁS M F a járműre ható elfordító nyomaték, M FK az egyenlőtlen kerékerőkből adódó elkormányzási nyomaték
64 Csaphátradőlés és utánfutás: A csaphátradőlés hatására elkormányzáskor a külső kerék teteje befele, a belsőjé kifelé dől, ez javítja a kanyarstabilitást. Az utánfutás következtében a kerekek a menetirányba igyekeznek beállni. Oldalszél hatása egyenes haladáskor Visszatérítő centrifugális erő kanyarodás közben
65 5.4.2 Leszármaztatott paraméterek Billenési momentán centrum: φ S k S k F fy S f G f Z k Z b Az ábra jelölései: S K a kocsitest súlypontja; S f a futómű súlypontja; G k a kocsitest súlya; G f a futómű súlya; M a billenési momentán centrum; Z k a külső kerék terhelése; Z b a belső kerék terhelése; F ky a kocsiestre ható oldalerő; F fy a futóműre ható oldalerő. A kocsitestre ható oldalerő (ez lehet kanyarodás közbeni centrifugális erő, oldalszél, oldallejtő) következtében a kocsitest megbillen ψ szöggel a pillanatnyi középpont (momentán centrum) körül. A billenés következtében a kocsitest súlypontja oldalra, b távolságra eltolódik. Ennek hatására megváltozik mindkét kerék függőleges terhelése
66 A felépítmény oldalbillenése kedvezőtlen jelenség, azt mérsékelni kell. Az oldaldőlés csökkenthető: rugók merevítésével (de a lengéskényelmi követelmények korlátozzák); a rugóbázis növelésével; a kocsitest súlypontjának csökkentésével; a momentán centrum emelésével; keresztstabilizátor beépítésével; számítógépes felépítmény szabályozással (ABC, Active Body Control rendszer). A billenési momentán centrum magassága függ a futómű tipusától és a felfüggesztés geometriai kialakításától. 1) McPherson futómű momentán centruma:
67 2) Háromszög - trapéz keresztlengőkaros futómű momentán centruma: 3) Ferde tengelyű hosszlengőkarú futómű momentán centruma:
68 4) Négy lengőrudas merev tengelyes futómű momentán centruma: Felülnézet Oldalnézet
69 5) Csatolt hosszlengőkaros futómű momentán centruma: Billenési momentán tengely Az első és a hátsó futómű billenési momentán centrumát összekötve kapjuk a jármű billenési momentán tengelyét. A momentán tengely helyzete lehet: 1) előre lejt, az első futómű billenési merevsége kisebb, mint a hátsó; 2) hátrafelé lejt, az első futómű billenési merevsége nagyobb, mint a hátsóé; 3) vízszintes, a futóművek billenési merevsége azonos. Az első és hátsó futómű oldalbillenési merevségének aránya befolyásolja a jármű sajátkormányzási tulajdonágainak változását az oldalgyorsulás függvényében. Ha a billenési momentán tengely előre lejt, akkor a jármű sajátkormányzása az alulkormányzottság felé változik, ha hátrafelé lejt a változás a túlkormányzottság felé mutat
70 - 70 -
71 Bólintási centrum: A jármű felépítménye fékezéskor vagy gyorsuláskor a tehetetlenségi erő hatására a bólintási centrum körül elfordul. Ennek következtében a felépítmény súlypontja elmozdul előre, illetve hátra, aminek következtében megváltoznak a függőleges tengelyterhelések. A hosszirányú átterhelődés is káros hatású, a tapadási erő csökkenéséhez vezet, aminek következtében romlik a jármű menetstabilitása. Az átterhelődés a bólintási centrum emelésével csökkenthető. A bólintási centrum magassága a futóművek típusától, a felfüggesztés geometriájától függ. A bólintás csökkenthető a rugók merevségének növelésével természetesen a rugózási kényelem megszabta keretek közt. Az ABC szabályozó rendszer a bólintó mozgást is figyeli és akadályozza. A bólintás különösen a motorkerékpárok stabilitását befolyásolja Elől teleszkópos hátul lengővillás motorkerékpár bólintási centruma
72 A kerékdőlés változás: A korszerű járművek futóműveinek kerékdőlése vagy külső számítógépes szabályozással vagy önszabályozással változtatható a jármű stabilitásának megtartása vagy növelése érdekében. A szabályozás célfüggvényének kimenő paramétere azonos: a kanyar külső oldalán a kerékdőlést negatív, a belső oldalán pozitív irányba kell változtatni. Számítógépes külső szabályozáskor ezt a változtatást a jármű stabilitását meghatározó több paraméter függvényében lehet megadni, mint például a jármű sebessége, a különböző irányú gyorsulásai, a tapadási tényező változásai, stb. Az önszabályozós intelligens futóműveknél a kerékdőlés leggyakoribb esetben a kerék és a felépítmény közti elmozdulás, vagyis a kerék ki-, berugózása függvényében változik. A felépítmény kanyarodás közbeni billenése következtében a külső kerék berugózik, a belső kirugózik, ennek megfelelően határozható meg az önszabályozás célfüggvénye. A kerék ki-, berugózásával szabályozott kerékdőlés változás jól megvalósítható a háromszög trapéz kerszetlengőkaros felfüggesztésű futóműveknél, viszont egyáltalán nem a merev hidas futóműveknél. A McPheson futóműveknél csak a nyomtáv változásával érhető el kedvező kerékdőlés változás
73 Összetartás változás: Az összetartás menetközbeni szabályozása is a jármű stabilitásának megtartását, növelését szolgálja elsősorban a jármű sajátkormányzási viselkedésének ellenőrzése, befolyásolása révén. Nevezetesen a jármű túlkormányzottá válását kell megakadályozni. Ennek megfelelően a kanyarodás közben a hátsó futóműnél a külső kereket befelé, az összetartás irányába kell kormányozni. Az első futóműnél a túlkormányzás elkerülése érdekében éppen fordított a korrekció iránya. Az önkormányzott intelligens futóműveknél ez a szabályozás a kerekek ki berugózásával valósítható meg
74 Nyomtávváltozás: A nyomtáv az egy futómű két kerékének talppontjai közti távolság. A nyomtáv változását ebből következően a talppontok keresztirányú elmozdulása idézi elő. A nyomtáv változását egyenes irányú haladás esetén vizsgálják, miközben a felépítmény változó bólintó mozgást végez, amit a váltakozó lassítás gyorsítás idéz elő. A nyomtávváltozás általában káros jelenség, miután a keresztben elmozduló kerekek megcsúszhatnak, melynek következtében csökken a kerék tapadása, a jármű elvesztheti a stabilitását. A merev hidas futóműveknél nincs nyomtávváltozás, míg független felfüggesztési futóműveknél a kerék ki-berugózása, a kerékdőlés, az összetartás változása a nyomtáv jelentős változását idézheti elő. 5.5 Korszerű futóművek jellemző konstrukciói A jelenleg is gyártott futóműveket konstrukciójuk alapján az alábbiak szerint lehet csoportosítani: I. Merevhidas futóművek laprugós merevhidas futóművek; tekercsrugós merevhidas futóművek; légrugós merevhidas futóművek; kombinált lap és légrugós futóművek. II. Csatolt hosszlengőkaros futóművek: rugóstagos csatolt kerekes futóművek; különálló tekercsrugós csatolt kerekes futóművek III. Független kerék-felfüggesztésű futóművek: egy keresztlengőkaros futóművek, hosszlengőkaros futóművek, ferde tengelyű hosszlengőkaros futóművek, háromszög-trapáz keresztlengőkaros futóművek, Mc Pherson típusú futóművek elosztokinematikai futóművek a) kettős csuklós elven felépülő futóművek; b) soklengőkaros (Multilink, Mehrlenker, Raumlenker) futóművek
75 A három főcsoportba sorolás azon alapul, hogy egy futóművön belül a két kerék egymáshoz képest milyen mozgásokat végezhet. A térben hatféle mozgást különböztetünk meg: 1. x tengely irányú mozgás; 2. y irányú mozgás; 3. z irányú mozgás; 4. x tengely körüli elfordulás; 5. y tengely körüli elfordulás; 6. z tengely körüli elfordulás. A különböző típusú futóművek kerekeinek egymáshoz viszonyított mozgási lehetőségei: Mozgási lehetőség Futómű típusa Tengely irányú Tengely körüli mozgás elfordulás X Y Z X Y Z Merevhidas futómű Csatolt lengőkarú futómű Független felfüggesztésű futómű Merevhidas futóművek: A merev hidas futóműveknél a két kerék egymáshoz viszonyítva nem végezhet semmiféle mozgást, vagyis a futómű szabadságfoka nulla. A két kereket szilárdságilag merev tengelytest vagy híd kapcsol össze. A kerekek a felépítményhez a tengelytest felfüggesztésén keresztül kapcsolódnak. lengőrúd, mely egyszeres kényszer; lengőkar, mely kétirányú kényszer; laprugó, mely mozgást és forgást is képes megakadályozni

76 Ikarus 200 típusú autóbusz merevhidas első futóműve Ikarus 200 típusú autóbusz merevhidas első futóműve
77 VW laprugós merevhidas futómű 5 4 Mitsubishi Pajero tekercsrugós merevhidas futómű ) hídtest; 2) hosszlengőkar; 3) gumipersely; 4) Panhard-rúd; 5) Kerszetstabilizátor
78 78
79 5.5.2 Csatolt hosszlengőkaros futóművek: Opel Astra hátsó futóműve A csatolt hosszlengőkaros futóműveket félig független futóműveknek is nevezik, miután az egy futómű két kereke egymáshoz viszonyítva két szabadságfokú mozgást végezhet: elmozdulhat z tengely irányába és a tengelycsonkok elfordulhatnak részlegesen az y - tengely körül. A csatolt hosszlengőkaros futóművek dinamikus paraméterei általában kedvezőtlenek, a kerékdőlés változásuk, az összetartás változásuk csekély, momentán centrumuk alacsony, viszont nyomtávváltozásuk kedvező. Ezek a futóművek igen széles körben elterjedtek a kis és közepes kategóriájú autóknál, szerkezetük egyszerű, kis tömegűek, könnyen gyárthatóak, karbantartást szinte nem igényelnek, kicsi a helyszükségletük, ami nagyobb csomagteret, rakfelületet eredményez. Nagyobb kategóriájú dinamikus járműveknél, versenyautóknál nem alkalmazzák. 79
80 5.5.3 Független kerékfelfüggesztésű futóművek: A független kerékfelfüggesztésű futóműveknél az egy futóművön lévő két kerék egymástól függetlenül mozoghat, vagyis a futómű szabadságfoka hat. Viszont egy keréknek a felépítményhez képest csak egy szabadságfoka van, csak z irányba., a lengés irányába mozoghat, de a rugók, lengéscsillapítók korlátozása mellett. Az ilyen futóművek kerekének tengelycsonkján általában három kapcsolópontot alakítanak ki. A speciális, önszabályozott, elasztókinematikus futóműveken négy öt kapcsolópontot is találunk. Ha a kerékfelfüggesztést csak lengőrudak alkotják, akkor kerekenként ötre van szükség. Ilyenek a multilink futóművek (pl. Mercedes, Honda Accord stb). A független felfüggesztésű futóművekben a lengőkarok, lengőrudak különböző variációkban fordulnak elő. A lengőkarok, lengőrudak hosszainak, bekötési szögeinek célszerű megválasztásával, rugalmas, önbeálló csuklókkal (úgynevezett elasztométerekkel) különféle önszabályozó konstrukciókat lehet kialakítani. 80
81 Hosszlengőkaros futóművek: Renault Megane hosszlengőkaros futóműve A hosszlengőkaros futóművek lengési tengelye merőleges a jármű hosszirányú szimmetria síkjára. Ebből adódóan a momentán centruma a talajon van, kerékdőlés változásra nem képes, viszont nincs nyomtávváltozása. Dinamikusabb járműveken igényesebb keresztstabilizálással és rugózással együtt alkalmazzák (pl. Renault, Citroen stb). 81
82 Ferde tengelyű hosszlengőkaros futóművek A hosszirányú lengőkar tengelye szöget zár be a jármű hossz és kerszt tengelyével egyaránt. Kedvező a momentán centruma, a kerékdőlés változása, kedvezőtlen az összetartás változása és a nyomtávváltozása. Előnye az egyszerű szerkezet, könnyű gyárthatóság, kis karbantartási igény, nagy szilárdság. Évtizedekig a közepes és nagy kategóriájú gépkocsik jellemző futóműve volt. Ma már alig alkalmazzák. Subaru E12 hátsó futómű Háromszög trapéz keresztlengőkaros futóművek: Háromszög trapéz keresztlengőkaros futóműveknél a tengelycsonkon három csukló található. Az alsó és felső csuklóhoz kapcsolódnak a hárompontos keresztirányú felfüggesztő elemek, míg a középső csuklóhoz első futóműnél a nyomtávrúd, hátsó futóműveknél az önkormányzást szabályozó rúd vagy az összkerékkormányzású rendszer esetén a hátsó nyomtávrúd. A korszerű típusoknál a tengelycsonk felső nyúlványa egészen a gumiabroncs fölé emelkedik. A leggyakrabban alkalmazott futóműtípus. A kis és közepes kategóriájú autóknál a McPherson típusú futómű versenytársa, a nagyobb kategóriájú gépkocsiknál, versenyautóknál, autóbuszoknál egyre szélesebb körben alkalmazzák. A felfüggesztés geometriai méreteinek helyes megválasztásával szinte valamennyi dinamikus paraméter kedvezően alakítható. 82


83 Alfa Romeo 147. első futóműve Van Hool T9 típusú autóbusz első futóműve Az autóbuszoknál a tengelycsonk kettős kialakítású, a keresztlengőkarok az álló tengelycsonk részhez kapcsolódnak. Az itt alkalmazott csuklók csak egy szabadságfokúak, aminek a következtében nem azok alkotják az elkormányzás tengelyét, hanem a két tengelycsonk részt összekapcsoló függőcsapszeg. 83
84 McPherson típusú futóművek: A McPherson típusú futóművek fél évszázada a kis és közepes autók egyik leggyakoribb futóműve. A kerék tengelycsonkját alul gömbcsuklós hárompontos keresztirányú felfüggesztés, a tengelycsonk felső részét pedig a teleszkópos lengéscsillapító vezeti meg. A lengéscsillapító akkor tölti be ezt a szerepét, ha a csillapító hengere mereven kapcsolódik a tengelycsonkhoz (pl. két csavarral rögzítve vagy besajtolva) és a csillapító rúdját a támcsapágy révén a felépítményhez rögzítik. Nagyarányú elterjedésének az oka egyszerű szerkezete, kis helyfoglalása, mely elsősorban az elöl keresztben elhelyezett motorok számára előnyös. Ford Focus C-MAX első futóműve 84

85 Soklengőrudas (multilink) futóművek: BMW DGP első futóműve Mercedes 124 hátsó futóműve A Mercedes soklengőrudas (multilink, mehlenker, raumlenker) Zomotor Ádám magyar mérnök tervezte 1983 ban. A hátsó futómű tengelycsonkján a szokásos három helyett öt tengelycsonk nyúlvány található, a hozzájuk csatlakozó lengőrudak nagytérfogatú gumiszilentblokkok révén kapcsolódnak a jármű hátsó segédvázához. Dinamikusan változik a kerékdőlés, a kerékösszetartás, az elkormányzási tengely pozíciója, miközben a futómű nyomtávja alig változik. A felépítmény billenési momentum centruma magasan helyezkedik el. Ez a futómű indokoltan nevezhető interaktívan szabályozott rendszerűnek (IDS Intelligent Driving System). 85

86 BMW 5. széria integrált hátsó futómű A multilink futómű továbbfejlesztett típusa a BMW 5. széria integrált hátsó futóműve. Ezen két új elem is megjelent: a szabad csuklós kétrészes lengőrúd és az elasztikus szabályozó rúd. Ezek hatására a futómű már kis oldal és hosszirányú erők és kis oldalbillenés esetén is önszabályozással változtatja a paramétereket. Ez különösen előnyös az aktív felépítmény szabályozó rendszerrel (ABC) felszerelt járműveknél, amelyeknél a felépítmény szinte nem végez billenő és bólintó mozgást. 86
JÁRMŰRENDSZEREK TERVEZÉSE (Tervezési útmutató) Oktatási segédlet
 Oktatási segédlet") JÁRMŰRENDSZEREK TERVEZÉSE (Tervezési útmutató) Oktatási segédlet 1 Tengelykapcsoló 1. Konstrukciós főméretek, befoglaló méretek 2. A nyomatékfelesleg tényező felvétele 3. A tárcsaszám, súrlódási tényező
JÁRMŰRENDSZEREK TERVEZÉSE (Tervezési útmutató) Oktatási segédlet 1 Tengelykapcsoló 1. Konstrukciós főméretek, befoglaló méretek 2. A nyomatékfelesleg tényező felvétele 3. A tárcsaszám, súrlódási tényező
JKL rendszerek. Közúti járművek szerkezeti felépítése. Szabó Bálint
 JKL rendszerek Közúti járművek szerkezeti felépítése Szabó Bálint 1 Közúti járművek szerkezeti felépítése Tartalom Bevezetés Járműdinamika Gépjárművek hajtásrendszerei Gépjármű fékrendszerek 2 2 Bevezetés
JKL rendszerek Közúti járművek szerkezeti felépítése Szabó Bálint 1 Közúti járművek szerkezeti felépítése Tartalom Bevezetés Járműdinamika Gépjárművek hajtásrendszerei Gépjármű fékrendszerek 2 2 Bevezetés
VIZSGABIZTOS KÉPZÉS. 09_2. Kormányzás. Kádár Lehel. Budapest, 2012. - 1 -
 VIZSGABIZTOS KÉPZÉS 09_2. Kormányzás Kádár ehel Budapest, 2012. - 1 - 1.) A közúti járművek kormányzásával szembeni általános követelmények A közúti járművek kormányzásának az alábbi általános követelményeknek
VIZSGABIZTOS KÉPZÉS 09_2. Kormányzás Kádár ehel Budapest, 2012. - 1 - 1.) A közúti járművek kormányzásával szembeni általános követelmények A közúti járművek kormányzásának az alábbi általános követelményeknek
Gépjárművek és mobilgépek I.
 Gépjárművek és mobilgépek I. II. Előadás Hajtási módok, kanyarodás, fékek Összeállította: Dr. Sarka Ferenc Hajtási módok Elsőkerék-hajtás Hátsókerék-hajtás Összkerékhajtás Hátsókerék-hajtás Orrmotoros
Gépjárművek és mobilgépek I. II. Előadás Hajtási módok, kanyarodás, fékek Összeállította: Dr. Sarka Ferenc Hajtási módok Elsőkerék-hajtás Hátsókerék-hajtás Összkerékhajtás Hátsókerék-hajtás Orrmotoros
VIZSGABIZTOS KÉPZÉS. 09_1. Futóművek Kerékfelfüggesztés, futómű paraméterek, konstrukciók. Kádár Lehel. Budapest, 2012. - 1 -
 VIZSGABIZTOS KÉPZÉS 09_1. Futóművek Kerékfelfüggesztés, futómű paraméterek, konstrukciók Kádár Lehel Budapest, 2012. - 1 - 1) Futómű általános szerkezeti felépítése Futóművek elemcsoportjai és alkatrészei
VIZSGABIZTOS KÉPZÉS 09_1. Futóművek Kerékfelfüggesztés, futómű paraméterek, konstrukciók Kádár Lehel Budapest, 2012. - 1 - 1) Futómű általános szerkezeti felépítése Futóművek elemcsoportjai és alkatrészei
Mit nevezünk nehézségi erőnek?
 Mit nevezünk nehézségi erőnek? Azt az erőt, amelynek hatására a szabadon eső testek g (gravitációs) gyorsulással esnek a vonzó test centruma felé, nevezzük nehézségi erőnek. F neh = m g Mi a súly? Azt
Mit nevezünk nehézségi erőnek? Azt az erőt, amelynek hatására a szabadon eső testek g (gravitációs) gyorsulással esnek a vonzó test centruma felé, nevezzük nehézségi erőnek. F neh = m g Mi a súly? Azt
Pneumatikus kompatibilitás
 Pneumatikus kompatibilitás Farkas József, Kőfalusi Pál, Dr. Varga Ferenc Gépjárművek üzeme I. laboratóriumi gyakorlat 1 Lektorálta és szerkesztette Dr. Varga Ferenc és Dr. Emőd István Tartalomjegyzék:
Pneumatikus kompatibilitás Farkas József, Kőfalusi Pál, Dr. Varga Ferenc Gépjárművek üzeme I. laboratóriumi gyakorlat 1 Lektorálta és szerkesztette Dr. Varga Ferenc és Dr. Emőd István Tartalomjegyzék:
Gépjárművek és mobilgépek I.
 Gépjárművek és mobilgépek I. I. előadás Összeállította: Dr. Sarka Ferenc A félév követelményei A tárgy aláírással és gyakorlati jeggyel zárul. A megszerzésének feltételei: Az előadási órák legalább 60%-os
Gépjárművek és mobilgépek I. I. előadás Összeállította: Dr. Sarka Ferenc A félév követelményei A tárgy aláírással és gyakorlati jeggyel zárul. A megszerzésének feltételei: Az előadási órák legalább 60%-os
Gépjárművek és mobilgépek I. (GEGET702-B) 1 éves, járműmérnöki BSc szakos hallgatók számára. Ütemterv
 1 éves, járműmérnöki BSc szakos hallgatók számára. Ütemterv") Gépjárművek és mobilgépek I. (GEGET702-B) 1 éves, járműmérnöki BSc szakos hallgatók számára Ütemterv Tanulmányi Előadás Gyakorlat hét 1 Feltételek ismertetése. Gépkocsi története. Járműtípusok Számpéldák
Gépjárművek és mobilgépek I. (GEGET702-B) 1 éves, járműmérnöki BSc szakos hallgatók számára Ütemterv Tanulmányi Előadás Gyakorlat hét 1 Feltételek ismertetése. Gépkocsi története. Járműtípusok Számpéldák
Haszongépjármű fékrendszerek Alapok Rendszerfelépítés
 Haszongépjármű fékrendszerek Alapok Rendszerfelépítés Gépjármű futóművek II. Szabó Bálint 2015. szeptember 10. 1 Haszongépjármű fékrendszerekre vonatkozó előírások Fékrendszer típusok Haszongépjárműveket
Haszongépjármű fékrendszerek Alapok Rendszerfelépítés Gépjármű futóművek II. Szabó Bálint 2015. szeptember 10. 1 Haszongépjármű fékrendszerekre vonatkozó előírások Fékrendszer típusok Haszongépjárműveket
Figyelem! Csak belső és saját használatra! Terjesztése és másolása TILOS!
 Figyelem! Csak belső és saját használatra! Terjesztése és másolása TILOS! 1. példa Vasúti kocsinak a 6. ábrán látható ütközőjébe épített tekercsrugóban 44,5 kn előfeszítő erő ébred. A rugó állandója 0,18
Figyelem! Csak belső és saját használatra! Terjesztése és másolása TILOS! 1. példa Vasúti kocsinak a 6. ábrán látható ütközőjébe épített tekercsrugóban 44,5 kn előfeszítő erő ébred. A rugó állandója 0,18
A Horváth Mérnökiroda, A Budapesti Műszaki Egyetem Gépjárművek Tanszéke. A Schwarzmüller Járműgyártó és Kereskedelmi Kft
 A járóképes alvázakra épített különböző felépítményekkel kialakítható tehergépkocsik forgalombahelyezésének hatósági eljárásához A Horváth Mérnökiroda, A Budapesti Műszaki Egyetem Gépjárművek Tanszéke
A járóképes alvázakra épített különböző felépítményekkel kialakítható tehergépkocsik forgalombahelyezésének hatósági eljárásához A Horváth Mérnökiroda, A Budapesti Műszaki Egyetem Gépjárművek Tanszéke
Járműmechanikamechanika Dr Emőd István
 Járműmechanikamechanika Dr Emőd István 3/1 Hosszdinamika Teljesítmény- és energiaigény a legyőzendő menetellenállások határozzák meg. Ezek: állandósult állapotban: a gördülési ellenállás a légellenállás
Járműmechanikamechanika Dr Emőd István 3/1 Hosszdinamika Teljesítmény- és energiaigény a legyőzendő menetellenállások határozzák meg. Ezek: állandósult állapotban: a gördülési ellenállás a légellenállás
2. A gépkocsi vezetése
 2. A gépkocsi vezetése 1. Általában balról jobbra milyen sorrendben találjuk a gépkocsiban a gáz-, fékés a tengelykapcsoló pedálokat? a) Gáz fék tengelykapcsoló. b) Tengelykapcsoló fék gáz. c) Fék gáz
2. A gépkocsi vezetése 1. Általában balról jobbra milyen sorrendben találjuk a gépkocsiban a gáz-, fékés a tengelykapcsoló pedálokat? a) Gáz fék tengelykapcsoló. b) Tengelykapcsoló fék gáz. c) Fék gáz
Mezőgazdasági erőgépek
 Nagyállattenyésztési és Termeléstechnológiai Tanszék Mezőgazdasági erőgépek Erőátvitel Készítette: Dr.Desztics Gyula Erőátviteli szerkezet Feladata nyomaték és a fordulatszám módosítása nyomaték átvitele
Nagyállattenyésztési és Termeléstechnológiai Tanszék Mezőgazdasági erőgépek Erőátvitel Készítette: Dr.Desztics Gyula Erőátviteli szerkezet Feladata nyomaték és a fordulatszám módosítása nyomaték átvitele
1. Magyarázza meg és definiálja a négyütemű benzinmotor alábbi jellemzőit! Elméleti és valóságos körfolyamat A fajlagos fogyasztás és légviszony
 1. Magyarázza meg és definiálja a négyütemű benzinmotor alábbi jellemzőit! Elméleti és valóságos körfolyamat A fajlagos fogyasztás és légviszony Teljes terhelési jelleggörbe 2. Magyarázza el a négyütemű
1. Magyarázza meg és definiálja a négyütemű benzinmotor alábbi jellemzőit! Elméleti és valóságos körfolyamat A fajlagos fogyasztás és légviszony Teljes terhelési jelleggörbe 2. Magyarázza el a négyütemű
CITROËN JUMPER Tehergépkocsi
 CITROËN JUMPER Tehergépkocsi Műszaki jellemzők 2013. február Jumper általános műszaki jellemzők Motor HDi 110 HDi 130 HDi 150 HDi 180 hengerek száma 4 4 4 4 hengerűrtartalom (cm 3 ) 2198 2198 2198 2998
CITROËN JUMPER Tehergépkocsi Műszaki jellemzők 2013. február Jumper általános műszaki jellemzők Motor HDi 110 HDi 130 HDi 150 HDi 180 hengerek száma 4 4 4 4 hengerűrtartalom (cm 3 ) 2198 2198 2198 2998
ÚJ CITROËN JUMPER Tehergépkocsi
 ÚJ CITROËN JUMPER Tehergépkocsi Műszaki jellemzők 2014 új Jumper általános műszaki jellemzők Motor HDi 110 HDi 130 HDi 150 HDi 180 hengerek száma 4 4 4 4 hengerűrtartalom (cm 3 ) 2198 2198 2198 2998 max.
ÚJ CITROËN JUMPER Tehergépkocsi Műszaki jellemzők 2014 új Jumper általános műszaki jellemzők Motor HDi 110 HDi 130 HDi 150 HDi 180 hengerek száma 4 4 4 4 hengerűrtartalom (cm 3 ) 2198 2198 2198 2998 max.
Gépjárművek és mobilgépek I.
 Gépjárművek és mobilgépek I. IV. Előadás Fékrendszerek, ABS, kormányművek, kormányrásegítők Összeállította: Dr. Sarka Ferenc Főfékhenger Feladata: Nyomás létesítése a fékkörökben. Hőmérséklet változáskor
Gépjárművek és mobilgépek I. IV. Előadás Fékrendszerek, ABS, kormányművek, kormányrásegítők Összeállította: Dr. Sarka Ferenc Főfékhenger Feladata: Nyomás létesítése a fékkörökben. Hőmérséklet változáskor
A sok jelzőtábla zavaró. Dr. Debreczeni Gábor előadása
 A sok jelzőtábla zavaró A jelzőtáblák mérete 4/2001. (I.31.) KöVim rendelet A jellemző méret 450 mm 600 mm 750 mm 900 mm 1000 mm A közlekedő személy segítése A pálya legyen egyszerű, egységes, akadálymentes,
A sok jelzőtábla zavaró A jelzőtáblák mérete 4/2001. (I.31.) KöVim rendelet A jellemző méret 450 mm 600 mm 750 mm 900 mm 1000 mm A közlekedő személy segítése A pálya legyen egyszerű, egységes, akadálymentes,
BEMUTATÓ FELADATOK (2) ÁLTALÁNOS GÉPTAN tárgyból
 ÁLTALÁNOS GÉPTAN tárgyból") BEMUTATÓ FELADATOK () 1/() Egy mozdony vízszintes 600 m-es pályaszakaszon 150 kn állandó húzóer t fejt ki. A vonat sebessége 36 km/h-ról 54 km/h-ra növekszik. A vonat tömege 1000 Mg. a.) Mekkora a mozgási
BEMUTATÓ FELADATOK () 1/() Egy mozdony vízszintes 600 m-es pályaszakaszon 150 kn állandó húzóer t fejt ki. A vonat sebessége 36 km/h-ról 54 km/h-ra növekszik. A vonat tömege 1000 Mg. a.) Mekkora a mozgási
2.3 Newton törvények, mozgás lejtőn, pontrendszerek
 Keresés (http://wwwtankonyvtarhu/hu) NVDA (http://wwwnvda-projectorg/) W3C (http://wwww3org/wai/intro/people-use-web/) A- (#) A (#) A+ (#) (#) English (/en/tartalom/tamop425/0027_fiz2/ch01s03html) Kapcsolat
Keresés (http://wwwtankonyvtarhu/hu) NVDA (http://wwwnvda-projectorg/) W3C (http://wwww3org/wai/intro/people-use-web/) A- (#) A (#) A+ (#) (#) English (/en/tartalom/tamop425/0027_fiz2/ch01s03html) Kapcsolat
RÉSZLETEZŐ OKIRAT a NAH /2017 nyilvántartási számú akkreditált státuszhoz
 RÉSZLETEZŐ OKIRAT a NAH-1-1708/2017 nyilvántartási számú akkreditált státuszhoz A TÜV Rheinland-KTI Kft. Járműtechnikai és Munkavédelmi Laboratórium (1119 Budapest, Than Károly u. 3-5.) akkreditált területe:
RÉSZLETEZŐ OKIRAT a NAH-1-1708/2017 nyilvántartási számú akkreditált státuszhoz A TÜV Rheinland-KTI Kft. Járműtechnikai és Munkavédelmi Laboratórium (1119 Budapest, Than Károly u. 3-5.) akkreditált területe:
NYF-MMFK Erőgépek és Gépjárműtechnikai Tanszék gépészmérnöki szak III. évfolyam
 GÉPJÁRMŰSZERKEZETEK I. Tantárgy kódja: GM 2507 Meghirdetés féléve: 5. félév Össz óraszám (elm+gyak): 28 óra heti óraszám száma 1. 14 1 1 14 14 Összesen: 14 14 gépelemek, hajtástechnika1, belsőégésű mot
GÉPJÁRMŰSZERKEZETEK I. Tantárgy kódja: GM 2507 Meghirdetés féléve: 5. félév Össz óraszám (elm+gyak): 28 óra heti óraszám száma 1. 14 1 1 14 14 Összesen: 14 14 gépelemek, hajtástechnika1, belsőégésű mot
Légfékes pótkocsik tervezése, kivitelezése és ellenőrzése
 Légfékes pótkocsik tervezése, kivitelezése és ellenőrzése A légfékes pótkocsik engedélyezési eljárásához szükséges fékvizsgálatai során számos érdekes tapasztalatra tettünk szert. A járművek tervezésekor
Légfékes pótkocsik tervezése, kivitelezése és ellenőrzése A légfékes pótkocsik engedélyezési eljárásához szükséges fékvizsgálatai során számos érdekes tapasztalatra tettünk szert. A járművek tervezésekor
MEZŐGAZDASÁGI GÉPEK A KÖZÚTI FORGALOMBAN - GÖDÖLLŐ
 - GÖDÖLLŐ 2011. MÁRCIUS 24. Fontosabb jogszabályok FONTOSABB JOGSZABÁLYOK 1/1975. (II. 5.) KPM-BM együttes rendelet a közúti közlekedés szabályairól 5/1990.(IV.12.) KöHÉM (ER) rendelet a közúti járművek
- GÖDÖLLŐ 2011. MÁRCIUS 24. Fontosabb jogszabályok FONTOSABB JOGSZABÁLYOK 1/1975. (II. 5.) KPM-BM együttes rendelet a közúti közlekedés szabályairól 5/1990.(IV.12.) KöHÉM (ER) rendelet a közúti járművek
Tehergépkocsi és mezőgazdasági járművek kanyarodási jellemzőinek kísérleti vizsgálata
 Tehergépkocsi és mezőgazdasági járművek kanyarodási jellemzőinek kísérleti vizsgálata Bell Márton*. Mayer Antal**Ignácz Ferenc*** *okl. közlekedésmérnök, IbB Hungary Mérnöki Szakértői Iroda, Budapest,
Tehergépkocsi és mezőgazdasági járművek kanyarodási jellemzőinek kísérleti vizsgálata Bell Márton*. Mayer Antal**Ignácz Ferenc*** *okl. közlekedésmérnök, IbB Hungary Mérnöki Szakértői Iroda, Budapest,
Tömegpontok mozgása egyenes mentén, hajítások
 2. gyakorlat 1. Feladatok a kinematika tárgyköréből Tömegpontok mozgása egyenes mentén, hajítások 1.1. Feladat: Mekkora az átlagsebessége annak pontnak, amely mozgásának első szakaszában v 1 sebességgel
2. gyakorlat 1. Feladatok a kinematika tárgyköréből Tömegpontok mozgása egyenes mentén, hajítások 1.1. Feladat: Mekkora az átlagsebessége annak pontnak, amely mozgásának első szakaszában v 1 sebességgel
SZÁMÍTÁSI FELADATOK I.
 SZÁMÍTÁSI FELADATOK I. A feladatokat figyelmesen olvassa el! A válaszokat a feladatban előírt módon adja meg! A számítást igénylő feladatoknál minden esetben először írja fel a megfelelő összefüggést (képletet),
SZÁMÍTÁSI FELADATOK I. A feladatokat figyelmesen olvassa el! A válaszokat a feladatban előírt módon adja meg! A számítást igénylő feladatoknál minden esetben először írja fel a megfelelő összefüggést (képletet),
Osvald Ferenc. A súlypont szerepe - gépjármű közlekedés kicsit másként
 Osvald Ferenc A súlypont szerepe - gépjármű közlekedés kicsit másként Több tűzoltó gépjármű baleset után heves érzelmi reakcióktól mentesen - érdemes megvizsgálni miben más ezek vezetése? Igazságügyi szakértőt
Osvald Ferenc A súlypont szerepe - gépjármű közlekedés kicsit másként Több tűzoltó gépjármű baleset után heves érzelmi reakcióktól mentesen - érdemes megvizsgálni miben más ezek vezetése? Igazságügyi szakértőt
Felvételi, 2018 szeptember - Alapképzés, fizika vizsga -
 Sapientia Erdélyi Magyar Tudományegyetem Marosvásárhelyi Kar Felvételi, 2018 szeptember - Alapképzés, fizika vizsga - Minden tétel kötelező Hivatalból 10 pont jár Munkaidő 3 óra I Az alábbi kérdésekre
Sapientia Erdélyi Magyar Tudományegyetem Marosvásárhelyi Kar Felvételi, 2018 szeptember - Alapképzés, fizika vizsga - Minden tétel kötelező Hivatalból 10 pont jár Munkaidő 3 óra I Az alábbi kérdésekre
Kerékagymotoros Formula Student versenyautó menetdinamikai szimulációja
 bmemotion Kerékagymotoros Formula Student versenyautó menetdinamikai szimulációja Csortán-Szilágyi György Dorogi János Nagy Ádám Célunk Fő célunk: Villamos hajtású versenyautó tervezése és építése - részvétel
bmemotion Kerékagymotoros Formula Student versenyautó menetdinamikai szimulációja Csortán-Szilágyi György Dorogi János Nagy Ádám Célunk Fő célunk: Villamos hajtású versenyautó tervezése és építése - részvétel
DINAMIKA ALAPJAI. Tömeg és az erő
 DINAMIKA ALAPJAI Tömeg és az erő NEWTON ÉS A TEHETETLENSÉG Tehetetlenség: A testek maguktól nem képesek megváltoztatni a mozgásállapotukat Newton I. törvénye (tehetetlenség törvénye): Minden test nyugalomban
DINAMIKA ALAPJAI Tömeg és az erő NEWTON ÉS A TEHETETLENSÉG Tehetetlenség: A testek maguktól nem képesek megváltoztatni a mozgásállapotukat Newton I. törvénye (tehetetlenség törvénye): Minden test nyugalomban
KÖZLEKEDÉSI ALAPISMERETEK
 ÉRETTSÉGI VIZSGA 2010. május 14. KÖZLEKEDÉSI ALAPISMERETEK EMELT SZINTŰ ÍRÁSBELI VIZSGA 2010. május 14. 8:00 Az írásbeli vizsga időtartama: 240 perc Pótlapok száma Tisztázati Piszkozati OKTATÁSI ÉS KULTURÁLIS
ÉRETTSÉGI VIZSGA 2010. május 14. KÖZLEKEDÉSI ALAPISMERETEK EMELT SZINTŰ ÍRÁSBELI VIZSGA 2010. május 14. 8:00 Az írásbeli vizsga időtartama: 240 perc Pótlapok száma Tisztázati Piszkozati OKTATÁSI ÉS KULTURÁLIS
Mérnöki alapok 2. előadás
 Mérnöki alapok. előadás Készítette: dr. Váradi Sándor Budapesti Műszaki és Gazdaságtudományi Egyetem Gépészmérnöki Kar Hidrodinamikai Rendszerek Tanszék 1111, Budapest, Műegyetem rkp. 3. D ép. 334. Tel:
Mérnöki alapok. előadás Készítette: dr. Váradi Sándor Budapesti Műszaki és Gazdaságtudományi Egyetem Gépészmérnöki Kar Hidrodinamikai Rendszerek Tanszék 1111, Budapest, Műegyetem rkp. 3. D ép. 334. Tel:
A járművek menetdinamikája. Készítette: Szűcs Tamás
 A járművek menetdinamikája Készítette: Szűcs Tamás 2016 Tartalomjegyzék II. Menetdinamika: 1. Kicsúszási határsebesség 2. Kiborulási határsebesség 3. Komplex feladatok III. Motorjellemzők: 4. Lökettérfogat,
A járművek menetdinamikája Készítette: Szűcs Tamás 2016 Tartalomjegyzék II. Menetdinamika: 1. Kicsúszási határsebesség 2. Kiborulási határsebesség 3. Komplex feladatok III. Motorjellemzők: 4. Lökettérfogat,
1. Feladatok a dinamika tárgyköréből
 1. Feladatok a dinamika tárgyköréből Newton három törvénye 1.1. Feladat: Három azonos m tömegű gyöngyszemet fonálra fűzünk, egymástól kis távolságokban a fonálhoz rögzítünk, és az elhanyagolható tömegű
1. Feladatok a dinamika tárgyköréből Newton három törvénye 1.1. Feladat: Három azonos m tömegű gyöngyszemet fonálra fűzünk, egymástól kis távolságokban a fonálhoz rögzítünk, és az elhanyagolható tömegű
CITROËN JUMPER Tehergépkocsi
 CITROËN JUMPER Tehergépkocsi Műszaki jellemzők 2017 Motor BlueHDi 110 BlueHDi 130 BlueHDi 160 hengerek száma 4 4 4 hengerűrtartalom (cm 3 ) 1997 1997 1997 max. teljesítmény KW / LE (ford./perc) 81 / 110
CITROËN JUMPER Tehergépkocsi Műszaki jellemzők 2017 Motor BlueHDi 110 BlueHDi 130 BlueHDi 160 hengerek száma 4 4 4 hengerűrtartalom (cm 3 ) 1997 1997 1997 max. teljesítmény KW / LE (ford./perc) 81 / 110
CITROËN JUMPER Tehergépkocsi
 CITROËN JUMPER Tehergépkocsi Műszaki jellemzők 2016 Motor BlueHDi 110 BlueHDi 130 BlueHDi 160 hengerek száma 4 4 4 hengerűrtartalom (cm 3 ) 1997 1997 1997 max. teljesítmény KW / LE (ford./perc) 81 / 110
CITROËN JUMPER Tehergépkocsi Műszaki jellemzők 2016 Motor BlueHDi 110 BlueHDi 130 BlueHDi 160 hengerek száma 4 4 4 hengerűrtartalom (cm 3 ) 1997 1997 1997 max. teljesítmény KW / LE (ford./perc) 81 / 110
a NAT-1-1708/2013 nyilvántartási számú akkreditált státuszhoz
 Nemzeti Akkreditáló Testület RÉSZLETEZÕ OKIRAT a NAT-1-1708/2013 nyilvántartási számú akkreditált státuszhoz A TÜV Nord-KTI Kft. Jármûtechnikai és Munkavédelmi Laboratórium (1119 Budapest, Thán Károly
Nemzeti Akkreditáló Testület RÉSZLETEZÕ OKIRAT a NAT-1-1708/2013 nyilvántartási számú akkreditált státuszhoz A TÜV Nord-KTI Kft. Jármûtechnikai és Munkavédelmi Laboratórium (1119 Budapest, Thán Károly
FÉKBETÉTEK SZÁLLÍTÁSA. BKV Zrt. T-168/2014.
 FÉKBETÉTEK SZÁLLÍTÁSA MŰSZAKI DOKUMENTÁCIÓ BKV Zrt. T-168/2014. 1. Műszaki követelmények 12. sz. melléklet Valamennyi szállításra kerülő termék esetén 1) Ajánlattevőnek ajánlat során 10. sz. melléklet
FÉKBETÉTEK SZÁLLÍTÁSA MŰSZAKI DOKUMENTÁCIÓ BKV Zrt. T-168/2014. 1. Műszaki követelmények 12. sz. melléklet Valamennyi szállításra kerülő termék esetén 1) Ajánlattevőnek ajánlat során 10. sz. melléklet
A nagyobb tömegű Peti 1,5 m-re ült a forgástengelytől. Összesen: 9p
 Jedlik 9-10. o. reg feladat és megoldás 1) Egy 5 m hosszú libikókán hintázik Évi és Peti. A gyerekek tömege 30 kg és 50 kg. Egyikük a hinta végére ült. Milyen messze ült a másik gyerek a forgástengelytől,
Jedlik 9-10. o. reg feladat és megoldás 1) Egy 5 m hosszú libikókán hintázik Évi és Peti. A gyerekek tömege 30 kg és 50 kg. Egyikük a hinta végére ült. Milyen messze ült a másik gyerek a forgástengelytől,
A fényvisszaverő kontúrjelölés magyarországi bevezetéséről a július 10. után először forgalomba helyezett (új) járművek esetében
 járművek esetében") A fényvisszaverő kontúrjelölés magyarországi bevezetéséről a 2011. július 10. után először forgalomba helyezett (új) járművek esetében (Tájékoztató jogszabálykivonat) Az A. Függelék A/20. számú melléklete
A fényvisszaverő kontúrjelölés magyarországi bevezetéséről a 2011. július 10. után először forgalomba helyezett (új) járművek esetében (Tájékoztató jogszabálykivonat) Az A. Függelék A/20. számú melléklete
BIZTONSÁG Autósiskola 5440 Kunszentmárton Rákóczi út 1. 06-30/484-3738 Ny.Sz: 16-0057-06
 BIZTONSÁG Autósiskola 5440 Kunszentmárton Rákóczi út 1. 06-30/484-3738 Ny.Sz: 16-0057-06 Tisztelt Gépkocsivezető! A BIZTONSÁG Autósiskola nagy részt vállal a baleset megelőzésben, a vezetői engedéllyel
BIZTONSÁG Autósiskola 5440 Kunszentmárton Rákóczi út 1. 06-30/484-3738 Ny.Sz: 16-0057-06 Tisztelt Gépkocsivezető! A BIZTONSÁG Autósiskola nagy részt vállal a baleset megelőzésben, a vezetői engedéllyel
Az Európai Unió Hivatalos Lapja A TANÁCS 93/93/EGK IRÁNYELVE. (1993. október 29.) a motorkerékpárok és segédmotoros kerékpárok tömegéről és méreteiről
 a motorkerékpárok és segédmotoros kerékpárok tömegéről és méreteiről") 194 07/2. kötet 31993L0093 L 311/76 AZ EURÓPAI KÖZÖSSÉGEK HIVATALOS LAPJA 1993.12.14. A TANÁCS 93/93/EGK IRÁNYELVE (1993. október 29.) a motorkerékpárok és segédmotoros kerékpárok tömegéről és méreteiről
194 07/2. kötet 31993L0093 L 311/76 AZ EURÓPAI KÖZÖSSÉGEK HIVATALOS LAPJA 1993.12.14. A TANÁCS 93/93/EGK IRÁNYELVE (1993. október 29.) a motorkerékpárok és segédmotoros kerékpárok tömegéről és méreteiről
Használt, alacsonypadlós, diesel üzemű autóbuszok beszerzése (BKV Zrt. TB-98/17)
") Használt, alacsonypadlós, diesel üzemű autóbuszok beszerzése () KÖZBESZERZÉSI DOKUMENTUMOK III. KÖTET MŰSZAKI LEÍRÁS 2017. MŰSZAKI LEÍRÁS 1. rész: Közbeszerzési Útmutató 5 db használt, alacsonypadlós,
Használt, alacsonypadlós, diesel üzemű autóbuszok beszerzése () KÖZBESZERZÉSI DOKUMENTUMOK III. KÖTET MŰSZAKI LEÍRÁS 2017. MŰSZAKI LEÍRÁS 1. rész: Közbeszerzési Útmutató 5 db használt, alacsonypadlós,
Versenyautó futóművek. Járműdinamikai érdekességek a versenyautók világából
 Versenyutó futóművek Járműdinmiki érdekességek versenyutók világából Trtlom Bevezetés Alpfoglmk A gumibroncs Futómű geometri Átterhelődések Futómű kinemtik 2 Trtlom 2 Bevezetés Bevezetés Alpfoglmk A gumibroncs
Versenyutó futóművek Járműdinmiki érdekességek versenyutók világából Trtlom Bevezetés Alpfoglmk A gumibroncs Futómű geometri Átterhelődések Futómű kinemtik 2 Trtlom 2 Bevezetés Bevezetés Alpfoglmk A gumibroncs
GD Dollies Műszaki leírás
 GD Dollies Műszaki leírás A szállítóeszköz elektromos működtetésű, rádiós távvezérlésű két kocsiból álló egység, mely páros és szóló üzemmódban egyaránt használható. Elsősorban beltéri ill. üzemi területen
GD Dollies Műszaki leírás A szállítóeszköz elektromos működtetésű, rádiós távvezérlésű két kocsiból álló egység, mely páros és szóló üzemmódban egyaránt használható. Elsősorban beltéri ill. üzemi területen
Haladó mozgások A hely és a mozgás viszonylagos. A testek helyét, mozgását valamilyen vonatkoztatási ponthoz, vonatkoztatási rendszerhez képest adjuk
 Haladó mozgások A hely és a mozgás viszonylagos. A testek helyét, mozgását valamilyen vonatkoztatási ponthoz, vonatkoztatási rendszerhez képest adjuk meg, ahhoz viszonyítjuk. pl. A vonatban utazó ember
Haladó mozgások A hely és a mozgás viszonylagos. A testek helyét, mozgását valamilyen vonatkoztatási ponthoz, vonatkoztatási rendszerhez képest adjuk meg, ahhoz viszonyítjuk. pl. A vonatban utazó ember
A K É T V É G É N A L Á T Á M A S Z T O T T T A R T Ó S T A T I K A I V IZS-
 A K É T V É G É N A L Á T Á M A S Z T O T T T A R T Ó S T A T I K A I V IZS- Forgatónyomaték meghatározása G Á L A T A Egy erő forgatónyomatékkal hat egy pontra, ha az az erővel össze van kötve. Például
A K É T V É G É N A L Á T Á M A S Z T O T T T A R T Ó S T A T I K A I V IZS- Forgatónyomaték meghatározása G Á L A T A Egy erő forgatónyomatékkal hat egy pontra, ha az az erővel össze van kötve. Például
Newton törvények, erők
 Newton törvények, erők Newton I. törvénye: Minden test megtartja nyugalmi állapotát, vagy egyenes vonalú egyenletes mozgását (állandó sebességét), amíg a környezete ezt meg nem változtatja (amíg külső
Newton törvények, erők Newton I. törvénye: Minden test megtartja nyugalmi állapotát, vagy egyenes vonalú egyenletes mozgását (állandó sebességét), amíg a környezete ezt meg nem változtatja (amíg külső
Erőátvitel tervezése (BMEKOGJM612) féléves tervezési feladat kiírás
 féléves tervezési feladat kiírás") Erőátvitel tervezése (BMEKOGJM612) féléves tervezési feladat kiírás A Motortervezés I. (BMEKOGGM670) c. tárgy motorszimulációs házi feladata keretében választott belsőégésű motor paramétereinek felhasználásával
Erőátvitel tervezése (BMEKOGJM612) féléves tervezési feladat kiírás A Motortervezés I. (BMEKOGGM670) c. tárgy motorszimulációs házi feladata keretében választott belsőégésű motor paramétereinek felhasználásával
Gépjárművek vonóereje
 Gépjárművek vonóereje A gépjármű vonóerejének meghatározásához ismerni kell: a meghajtó motor jelleggörbéit, valamint a gépjármű erőátviteli szerkezetének jellemző adatait. 1 Gépjárművek vonóereje Az N
Gépjárművek vonóereje A gépjármű vonóerejének meghatározásához ismerni kell: a meghajtó motor jelleggörbéit, valamint a gépjármű erőátviteli szerkezetének jellemző adatait. 1 Gépjárművek vonóereje Az N
VIZSGABIZTOS KÉPZÉS. 2-M.3. Haszonjárművek futóművei. Budapest, 2010. Kádár Lehel. Kiegészítő képzés
 VIZSGABIZTOS KÉPZÉS Kiegészítő képzés 2-M.3. Haszonjárművek futóművei Kádár Lehel Budapest, 2010. 1 Haszonjármű futóművek Ebben a kurzusban a 3,5 tonnánál nagyobb össztömegű haszonjárművek (teherautók,
VIZSGABIZTOS KÉPZÉS Kiegészítő képzés 2-M.3. Haszonjárművek futóművei Kádár Lehel Budapest, 2010. 1 Haszonjármű futóművek Ebben a kurzusban a 3,5 tonnánál nagyobb össztömegű haszonjárművek (teherautók,
SZÁMÍTÁSI FELADATOK II.
 SZÁMÍTÁSI FELADATOK II. A feladatokat figyelmesen olvassa el! A válaszokat a feladatban előírt módon adja meg! A számítást igénylő feladatoknál minden esetben először írja fel a megfelelő összefüggést
SZÁMÍTÁSI FELADATOK II. A feladatokat figyelmesen olvassa el! A válaszokat a feladatban előírt módon adja meg! A számítást igénylő feladatoknál minden esetben először írja fel a megfelelő összefüggést
MUNKAANYAG. Tary Ferenc. 3500 kilogramm alatti öszgördülő súlyú gépjárművek kormányberendezései. A követelménymodul megnevezése: Gépjárműjavítás I.
 Tary Ferenc 3500 kilogramm alatti öszgördülő súlyú gépjárművek kormányberendezései A követelménymodul megnevezése: Gépjárműjavítás I. A követelménymodul száma: 0675-06 A tartalomelem azonosító száma és
Tary Ferenc 3500 kilogramm alatti öszgördülő súlyú gépjárművek kormányberendezései A követelménymodul megnevezése: Gépjárműjavítás I. A követelménymodul száma: 0675-06 A tartalomelem azonosító száma és
Pálya : Az a vonal, amelyen a mozgó test végighalad. Út: A pályának az a része, amelyet adott idő alatt a mozgó tárgy megtesz.
 Haladó mozgások A hely és a mozgás viszonylagos. A testek helyét, mozgását valamilyen vonatkoztatási ponthoz, vonatkoztatási rendszerhez képest adjuk meg, ahhoz viszonyítjuk. pl. A vonatban utazó ember
Haladó mozgások A hely és a mozgás viszonylagos. A testek helyét, mozgását valamilyen vonatkoztatási ponthoz, vonatkoztatási rendszerhez képest adjuk meg, ahhoz viszonyítjuk. pl. A vonatban utazó ember
Munka, energia Munkatétel, a mechanikai energia megmaradása
 Munka, energia Munkatétel, a mechanikai energia megmaradása Munkavégzés történik ha: felemelek egy könyvet kihúzom az expandert A munka Fizikai értelemben munkavégzésről akkor beszélünk, ha egy test erő
Munka, energia Munkatétel, a mechanikai energia megmaradása Munkavégzés történik ha: felemelek egy könyvet kihúzom az expandert A munka Fizikai értelemben munkavégzésről akkor beszélünk, ha egy test erő
BPW AGRO Drive A hidraulikus meghajtású tengely
 BPW AGRO Drive A hidraulikus meghajtású tengely Kedvezőtlen körülmények között történő nagy tömegű rakomány vontatására. BPW tengellyel akkor is folytathatja a munkát, amikor mások már feladták. BPW AGRO
BPW AGRO Drive A hidraulikus meghajtású tengely Kedvezőtlen körülmények között történő nagy tömegű rakomány vontatására. BPW tengellyel akkor is folytathatja a munkát, amikor mások már feladták. BPW AGRO
Régió RPO Kód LDE&MFH LDE&MFH&5EA PT kombináció 1.6 MT 1.6 MT. Váltóáttétel
 Régió RPO Kód LDE&MFH LDE&MFH&5EA PT kombináció 1.6 MT 1.6 MT Motor adatok Motor, elhelyezkedés elöl, keresztben beépítve elöl, keresztben beépítve Hűtőrendszer zárt rendszerű, folyadékhűtés zárt rendszerű,
Régió RPO Kód LDE&MFH LDE&MFH&5EA PT kombináció 1.6 MT 1.6 MT Motor adatok Motor, elhelyezkedés elöl, keresztben beépítve elöl, keresztben beépítve Hűtőrendszer zárt rendszerű, folyadékhűtés zárt rendszerű,
Mérnöki alapok 4. előadás
 Mérnöki alapok 4. előadás Készítette: dr. Váradi Sándor Budapesti Műszaki és Gazdaságtudományi Egyetem Gépészmérnöki Kar Hidrodinamikai Rendszerek Tanszék, Budapest, Műegyetem rkp. 3. D ép. 334. Tel: 463-6-80
Mérnöki alapok 4. előadás Készítette: dr. Váradi Sándor Budapesti Műszaki és Gazdaságtudományi Egyetem Gépészmérnöki Kar Hidrodinamikai Rendszerek Tanszék, Budapest, Műegyetem rkp. 3. D ép. 334. Tel: 463-6-80
Osztályozó, javító vizsga 9. évfolyam gimnázium. Írásbeli vizsgarész ELSŐ RÉSZ
 Írásbeli vizsgarész ELSŐ RÉSZ 1. Egy téglalap alakú háztömb egyik sarkából elindulva 80 m, 150 m, 80 m utat tettünk meg az egyes házoldalak mentén, míg a szomszédos sarokig értünk. Mekkora az elmozdulásunk?
Írásbeli vizsgarész ELSŐ RÉSZ 1. Egy téglalap alakú háztömb egyik sarkából elindulva 80 m, 150 m, 80 m utat tettünk meg az egyes házoldalak mentén, míg a szomszédos sarokig értünk. Mekkora az elmozdulásunk?
KÖZLEKEDÉSI ALAPISMERETEK (KÖZLEKEDÉSTECHNIKA)
") Közlekedési alapismeretek (közlekedéstechnika) emelt szint 111 ÉETTSÉGI VIZSGA 014. május 0. KÖZLEKEDÉSI ALAPISMEETEK (KÖZLEKEDÉSTECHNIKA) EMELT SZINTŰ ÍÁSBELI ÉETTSÉGI VIZSGA JAVÍTÁSI-ÉTÉKELÉSI ÚTMUTATÓ
Közlekedési alapismeretek (közlekedéstechnika) emelt szint 111 ÉETTSÉGI VIZSGA 014. május 0. KÖZLEKEDÉSI ALAPISMEETEK (KÖZLEKEDÉSTECHNIKA) EMELT SZINTŰ ÍÁSBELI ÉETTSÉGI VIZSGA JAVÍTÁSI-ÉTÉKELÉSI ÚTMUTATÓ
Ütközések vizsgálatához alkalmazható számítási eljárások
 Ütközések vizsgálatához alkalmazható számítási eljárások Az eljárások a kiindulási adatoktól és a számítás menetétől függően két csoportba sorolhatók. Az egyik a visszafelé történő számítások csoportja,
Ütközések vizsgálatához alkalmazható számítási eljárások Az eljárások a kiindulási adatoktól és a számítás menetétől függően két csoportba sorolhatók. Az egyik a visszafelé történő számítások csoportja,
1_2 Vontathatóság meghatározása
 1_2 Vontathatóság meghatározása Vizsgabiztosi alapképzés Budapest, 2012 2012. február 6. Mikulás Róbert 1 Vontathatóságot befolyásoló tényezők Jogszabályok Vonójármű tulajdonságai Vonóhorog tulajdonságai
1_2 Vontathatóság meghatározása Vizsgabiztosi alapképzés Budapest, 2012 2012. február 6. Mikulás Róbert 1 Vontathatóságot befolyásoló tényezők Jogszabályok Vonójármű tulajdonságai Vonóhorog tulajdonságai
SCM 012-130 motor. Típus
 SCM 012-130 motor HU ISO A Sunfab SCM robusztus axiáldugattyús motorcsalád, amely különösen alkalmas mobil hidraulikus rendszerekhez. A Sunfab SCM könyökös tengelyes, gömbdugattyús típus. A kialakítás
SCM 012-130 motor HU ISO A Sunfab SCM robusztus axiáldugattyús motorcsalád, amely különösen alkalmas mobil hidraulikus rendszerekhez. A Sunfab SCM könyökös tengelyes, gömbdugattyús típus. A kialakítás
PÉLDÁK ERŐTÖRVÉNYEKRE
 PÉLÁ ERŐTÖRVÉNYERE Szabad erők: erőtörvénnyel megadhatók, általában nem függenek a test mozgásállapotától (sebességtől, gyorsulástól) Példák: nehézségi erő, súrlódási erők, rugalmas erők, felhajtóerők,
PÉLÁ ERŐTÖRVÉNYERE Szabad erők: erőtörvénnyel megadhatók, általában nem függenek a test mozgásállapotától (sebességtől, gyorsulástól) Példák: nehézségi erő, súrlódási erők, rugalmas erők, felhajtóerők,
Euro LUJ&M60&5EA 2H0&MSA&5EA 2H0&MH8&5EA LNP&MYJ&5EA 1.4T MT 1.8L MT 1.8L AT
 Euro LUJ&M60&5EA 2H0&MSA&5EA 2H0&MH8&5EA LNP&MYJ&5EA 1.4T MT 1.8L MT 1.8L AT 2.0L Euro5 Dízel MT Motor adatok Motor, elhelyezkedés elöl, keresztben beépítve elöl, keresztben beépítve elöl, keresztben beépítve
Euro LUJ&M60&5EA 2H0&MSA&5EA 2H0&MH8&5EA LNP&MYJ&5EA 1.4T MT 1.8L MT 1.8L AT 2.0L Euro5 Dízel MT Motor adatok Motor, elhelyezkedés elöl, keresztben beépítve elöl, keresztben beépítve elöl, keresztben beépítve
Járműinformatika A jármű elektronikus rendszerei
 Járműinformatika A jármű elektronikus rendszerei 2016/2017. tanév, II. félév Dr. Kovács Szilveszter E-mail: szkovacs@iit.uni-miskolc.hu Informatika Intézet 107/a. Tel: (46) 565-111 / 21-07 A jármű alrendszerei
Járműinformatika A jármű elektronikus rendszerei 2016/2017. tanév, II. félév Dr. Kovács Szilveszter E-mail: szkovacs@iit.uni-miskolc.hu Informatika Intézet 107/a. Tel: (46) 565-111 / 21-07 A jármű alrendszerei
ERŐGÉPEK. 2007. 09. 15. Készítette: Csonka György 1
 ERŐGÉPEK 2007. 09. 15. Készítette: Csonka György 1 AZ ÓRA ÁTTEKINTÉSE Traktorok Traktorok csoportosítása Traktorok erőátvitelének főrészei: tengelykapcsolók, sebességváltók, differenciálmű, véglehajtás
ERŐGÉPEK 2007. 09. 15. Készítette: Csonka György 1 AZ ÓRA ÁTTEKINTÉSE Traktorok Traktorok csoportosítása Traktorok erőátvitelének főrészei: tengelykapcsolók, sebességváltók, differenciálmű, véglehajtás
Fizika. Fizika. Nyitray Gergely (PhD) PTE PMMIK február 13.
 PTE PMMIK február 13.") Fizika Nyitray Gergely (PhD) PTE PMMIK 017. február 13. A lejtő mint kényszer A lejtő egy ún. egyszerű gép. A következő problémában először a lejtőt rögzítjük, és egy m tömegű test súrlódás nélkül lecsúszik
Fizika Nyitray Gergely (PhD) PTE PMMIK 017. február 13. A lejtő mint kényszer A lejtő egy ún. egyszerű gép. A következő problémában először a lejtőt rögzítjük, és egy m tömegű test súrlódás nélkül lecsúszik
6. MECHANIKA-STATIKA GYAKORLAT Kidolgozta: Triesz Péter egy. ts. Négy erő egyensúlya, Culmann-szerkesztés, Ritter-számítás
 ZÉHENYI ITVÁN EGYETE GÉPZERKEZETTN É EHNIK TNZÉK 6. EHNIK-TTIK GYKORLT Kidolgozta: Triesz Péter egy. ts. Négy erő egyensúlya ulmann-szerkesztés Ritter-számítás 6.. Példa Egy létrát egy verembe letámasztunk
ZÉHENYI ITVÁN EGYETE GÉPZERKEZETTN É EHNIK TNZÉK 6. EHNIK-TTIK GYKORLT Kidolgozta: Triesz Péter egy. ts. Négy erő egyensúlya ulmann-szerkesztés Ritter-számítás 6.. Példa Egy létrát egy verembe letámasztunk
Rövidített szabadalmi leírás. Szélkerék pneumatikus erőátvitelű szélgéphez
 Rövidített szabadalmi leírás Szélkerék pneumatikus erőátvitelű szélgéphez A találmány tárgya szélkerék pneumatikus erőátvitelű szélgéphez, amely egy vízszintes tengely körül elforgathatóan ágyazott agyával
Rövidített szabadalmi leírás Szélkerék pneumatikus erőátvitelű szélgéphez A találmány tárgya szélkerék pneumatikus erőátvitelű szélgéphez, amely egy vízszintes tengely körül elforgathatóan ágyazott agyával
2. E L Ő A D Á S D R. H U S I G É Z A
 Mechatronika alapjai 2. E L Ő A D Á S D R. H U S I G É Z A elmozdulás erő nyomaték elmozdulás erő nyomaték Mechanizmusok Mechanizmus: általánosságban: A gép mechanikus elven működő részei Definíció: A
Mechatronika alapjai 2. E L Ő A D Á S D R. H U S I G É Z A elmozdulás erő nyomaték elmozdulás erő nyomaték Mechanizmusok Mechanizmus: általánosságban: A gép mechanikus elven működő részei Definíció: A
MUNKAANYAG. Macher Zoltán. 3500 kilogramm alatti összgördülő súlyú. járművek kormányberendezéseinek. diagnosztikája, javítása, beállítása
 Macher Zoltán 3500 kilogramm alatti összgördülő súlyú járművek kormányberendezéseinek diagnosztikája, javítása, beállítása A követelménymodul megnevezése: Gépjárműjavítás I. A követelménymodul száma: 0675-06
Macher Zoltán 3500 kilogramm alatti összgördülő súlyú járművek kormányberendezéseinek diagnosztikája, javítása, beállítása A követelménymodul megnevezése: Gépjárműjavítás I. A követelménymodul száma: 0675-06
Fizika alapok. Az előadás témája
 Az előadás témája Körmozgás jellemzőinek értelmezése Általános megoldási módszer egyenletes körmozgásnál egy feladaton keresztül Testek mozgásának vizsgálata nem inerciarendszerhez képest Centripetális
Az előadás témája Körmozgás jellemzőinek értelmezése Általános megoldási módszer egyenletes körmozgásnál egy feladaton keresztül Testek mozgásának vizsgálata nem inerciarendszerhez képest Centripetális
EGYSZERŰ GÉPEK. Azok az eszközök, amelyekkel kedvezőbbé lehet tenni az erőhatás nagyságát, irányát, támadáspontjának helyét.
 EGYSZERŰ GÉPEK Azok az eszközök, amelyekkel kedvezőbbé lehet tenni az erőhatás nagyságát, irányát, támadáspontjának helyét. Az egyszerű gépekkel munkát nem takaríthatunk meg, de ugyanazt a munkát kisebb
EGYSZERŰ GÉPEK Azok az eszközök, amelyekkel kedvezőbbé lehet tenni az erőhatás nagyságát, irányát, támadáspontjának helyét. Az egyszerű gépekkel munkát nem takaríthatunk meg, de ugyanazt a munkát kisebb
NGB_KV008_1. TANTÁRGYI TEMATIKA Tantárgy kód
 Oktatási hét 1 2 TANTÁRGYI TEMATIKA Tantárgy kód NGB_KV008_1 Félév (1/2/3) 1. páratlan Tantárgy cím Járműszerkezetek Tantárgy felelős Dr. Varga Zoltán Előadók Dr. Varga Zoltán, Szauter Ferenc Előtanulmányi
Oktatási hét 1 2 TANTÁRGYI TEMATIKA Tantárgy kód NGB_KV008_1 Félév (1/2/3) 1. páratlan Tantárgy cím Járműszerkezetek Tantárgy felelős Dr. Varga Zoltán Előadók Dr. Varga Zoltán, Szauter Ferenc Előtanulmányi
ELŐADÁS ÁTTEKINTÉSE. Traktorok
 ELŐADÁS ÁTTEKINTÉSE Traktorok Traktorok csoportosítása Traktorok erőátvitelének fő részei: tengelykapcsolók, sebességváltók, differenciálmű, véglehajtás Traktorok járószerkezete, gumiabroncsa Traktorok
ELŐADÁS ÁTTEKINTÉSE Traktorok Traktorok csoportosítása Traktorok erőátvitelének fő részei: tengelykapcsolók, sebességváltók, differenciálmű, véglehajtás Traktorok járószerkezete, gumiabroncsa Traktorok
Pótkocsi kínálata. A fékszerkezet: Két kerékre ható dobfék KNOTT rendszerű DIN szabvány szerint készül.
 Pótkocsik Pótkocsi kínálata A Bagodi Mezőgép Kft. által gyártott pótkocsik alkalmasak különféle ömlesztett anyagok, gabonafélék, gumóstermékek, szőlő, gyümölcs, zöldségfélék, vagy akár homok, sóder, föld,
Pótkocsik Pótkocsi kínálata A Bagodi Mezőgép Kft. által gyártott pótkocsik alkalmasak különféle ömlesztett anyagok, gabonafélék, gumóstermékek, szőlő, gyümölcs, zöldségfélék, vagy akár homok, sóder, föld,
8. melléklet a 326/2011. (XII. 28.) Korm. rendelethez A kártya formátumú vezetői engedélybe bejegyezhető kódok jegyzéke
 Korm. rendelethez A kártya formátumú vezetői engedélybe bejegyezhető kódok jegyzéke") 8. melléklet a 326/2011. (XII. 28.) Korm. rendelethez A kártya formátumú vezetői engedélybe bejegyezhető kódok jegyzéke - 01-99 kód: harmonizált európai uniós kódok GÉPJÁRMŰVEZETŐ (egészségügyi okok) 01.
8. melléklet a 326/2011. (XII. 28.) Korm. rendelethez A kártya formátumú vezetői engedélybe bejegyezhető kódok jegyzéke - 01-99 kód: harmonizált európai uniós kódok GÉPJÁRMŰVEZETŐ (egészségügyi okok) 01.
www.electromega.hu AZ ELEKTROMOS AUTÓZÁS ELŐNYEI, JÖVŐJE
 AZ ELEKTROMOS AUTÓZÁS ELŐNYEI, JÖVŐJE MI AZ AUTÓK LÉNYEGE? Rövid szabályozott robbanások sorozatán eljutni A -ból B -be. MI IS KELL EHHEZ? MOTOR melyben a robbanások erejéből adódó alternáló mozgást először
AZ ELEKTROMOS AUTÓZÁS ELŐNYEI, JÖVŐJE MI AZ AUTÓK LÉNYEGE? Rövid szabályozott robbanások sorozatán eljutni A -ból B -be. MI IS KELL EHHEZ? MOTOR melyben a robbanások erejéből adódó alternáló mozgást először
Fizika feladatok - 2. gyakorlat
 Fizika feladatok - 2. gyakorlat 2014. szeptember 18. 0.1. Feladat: Órai kidolgozásra: Mekkora az átlagsebessége annak pontnak, amely mozgásának első szakaszában v 1 sebességgel s 1 utat, második szakaszában
Fizika feladatok - 2. gyakorlat 2014. szeptember 18. 0.1. Feladat: Órai kidolgozásra: Mekkora az átlagsebessége annak pontnak, amely mozgásának első szakaszában v 1 sebességgel s 1 utat, második szakaszában
BIZTONSÁG Autósiskola 5440 Kunszentmárton Rákóczi út 1. 06-30/484-3738 Ny.Sz: 16-0057-06
 BIZTONSÁG Autósiskola 5440 Kunszentmárton Rákóczi út 1. 06-30/484-3738 Ny.Sz: 16-0057-06 e-mail: biztonsagautosiskola@gmail.com www.biztonsagautosiskola.hu A FÉKEZÉS HELYES TECHNIKÁLYA! A KRESZ szabályai
BIZTONSÁG Autósiskola 5440 Kunszentmárton Rákóczi út 1. 06-30/484-3738 Ny.Sz: 16-0057-06 e-mail: biztonsagautosiskola@gmail.com www.biztonsagautosiskola.hu A FÉKEZÉS HELYES TECHNIKÁLYA! A KRESZ szabályai
Gépjármű Diagnosztika. Szabó József Zoltán Főiskolai adjunktus BMF Mechatronika és Autótechnika Intézet
 Gépjármű Diagnosztika Szabó József Zoltán Főiskolai adjunktus BMF Mechatronika és Autótechnika Intézet 14. Előadás Gépjármű kerekek kiegyensúlyozása Kiegyensúlyozatlannak nevezzük azt a járműkereket, illetve
Gépjármű Diagnosztika Szabó József Zoltán Főiskolai adjunktus BMF Mechatronika és Autótechnika Intézet 14. Előadás Gépjármű kerekek kiegyensúlyozása Kiegyensúlyozatlannak nevezzük azt a járműkereket, illetve
A forgalomsűrűség és a követési távolság kapcsolata
 1 A forgalomsűrűség és a követési távolság kapcsolata 6 Az áramlatsűrűség (forgalomsűrűség) a követési távolsággal ad egyértelmű összefüggést: a sűrűség reciprok értéke a(z) (átlagos) követési távolság.
1 A forgalomsűrűség és a követési távolság kapcsolata 6 Az áramlatsűrűség (forgalomsűrűség) a követési távolsággal ad egyértelmű összefüggést: a sűrűség reciprok értéke a(z) (átlagos) követési távolság.
Pálya : Az a vonal, amelyen a mozgó test végighalad. Út: A pályának az a része, amelyet adott idő alatt a mozgó tárgy megtesz.
 Haladó mozgások A hely és a mozgás viszonylagos. A testek helyét, mozgását valamilyen vonatkoztatási ponthoz, vonatkoztatási rendszerhez képest adjuk meg, ahhoz viszonyítjuk. pl. A vonatban utazó ember
Haladó mozgások A hely és a mozgás viszonylagos. A testek helyét, mozgását valamilyen vonatkoztatási ponthoz, vonatkoztatási rendszerhez képest adjuk meg, ahhoz viszonyítjuk. pl. A vonatban utazó ember
KÖZLEKEDÉSI ALAPISMERETEK
 Közlekedési alapismeretek emelt szint 091 ÉRETTSÉGI VIZSGA 010. május 14. KÖZLEKEDÉSI ALAPISMERETEK EMELT SZINTŰ ÍRÁSBELI ÉRETTSÉGI VIZSGA JAVÍTÁSI-ÉRTÉKELÉSI ÚTMUTATÓ OKTATÁSI ÉS KULTURÁLIS MINISZTÉRIUM
Közlekedési alapismeretek emelt szint 091 ÉRETTSÉGI VIZSGA 010. május 14. KÖZLEKEDÉSI ALAPISMERETEK EMELT SZINTŰ ÍRÁSBELI ÉRETTSÉGI VIZSGA JAVÍTÁSI-ÉRTÉKELÉSI ÚTMUTATÓ OKTATÁSI ÉS KULTURÁLIS MINISZTÉRIUM
PTE Pollack Mihály Műszaki Kar Gépszerkezettan Tanszék
 PTE Pollack Mihály Műszaki Kar Gépszerkezettan Tanszék Összeállította: Dr. Stampfer Mihály 2009. Segédlet az ékszíjhajtás méretezéséhez A végtelenített ékszíjak és ékszíjtárcsák több országban is szabványosítottak
PTE Pollack Mihály Műszaki Kar Gépszerkezettan Tanszék Összeállította: Dr. Stampfer Mihály 2009. Segédlet az ékszíjhajtás méretezéséhez A végtelenített ékszíjak és ékszíjtárcsák több országban is szabványosítottak
Newton törvények, lendület, sűrűség
 Newton törvények, lendület, sűrűség Newton I. törvénye: Minden tárgy megtartja nyugalmi állapotát, vagy egyenes vonalú egyenletes mozgását (állandó sebességét), amíg a környezete ezt meg nem változtatja
Newton törvények, lendület, sűrűség Newton I. törvénye: Minden tárgy megtartja nyugalmi állapotát, vagy egyenes vonalú egyenletes mozgását (állandó sebességét), amíg a környezete ezt meg nem változtatja
Hidraulika. 1.előadás A hidraulika alapjai. Szilágyi Attila, NYE, 2018.
 Hidraulika 1.előadás A hidraulika alapjai Szilágyi Attila, NYE, 018. Folyadékok mechanikája Ideális folyadék: homogén, súrlódásmentes, kitölti a rendelkezésre álló teret, nincs nyírófeszültség. Folyadékok
Hidraulika 1.előadás A hidraulika alapjai Szilágyi Attila, NYE, 018. Folyadékok mechanikája Ideális folyadék: homogén, súrlódásmentes, kitölti a rendelkezésre álló teret, nincs nyírófeszültség. Folyadékok
A hagyományos hajtáselrendezésnél a jármű elején lévő motor hosszú kardántengellyel a hátsó tengelyt hajtja. Az orrmotor-elsőkerékhajtás és a
 1 A hagyományos hajtáselrendezésnél a jármű elején lévő motor hosszú kardántengellyel a hátsó tengelyt hajtja. Az orrmotor-elsőkerékhajtás és a farmotor-hátsókerékhajtás elrendezéseknél nincs szükség hosszú
1 A hagyományos hajtáselrendezésnél a jármű elején lévő motor hosszú kardántengellyel a hátsó tengelyt hajtja. Az orrmotor-elsőkerékhajtás és a farmotor-hátsókerékhajtás elrendezéseknél nincs szükség hosszú
Tájékoztató. Használható segédeszköz: számológép, rajzeszközök
 12/2013. (III. 29.) NFM rendelet szakmai és vizsgakövetelménye alapján. Szakképesítés, azonosító száma és megnevezése 55 525 01 Autótechnikus Tájékoztató A vizsgázó az első lapra írja fel a nevét! Ha a
12/2013. (III. 29.) NFM rendelet szakmai és vizsgakövetelménye alapján. Szakképesítés, azonosító száma és megnevezése 55 525 01 Autótechnikus Tájékoztató A vizsgázó az első lapra írja fel a nevét! Ha a
Pálya : Az a vonal, amelyen a mozgó tárgy, test végighalad. Út: A pályának az a része, amelyet adott idő alatt a mozgó tárgy megtesz.
 Haladó mozgások A hely és a mozgás viszonylagos. A testek helyét, mozgását valamilyen vonatkoztatási ponthoz, vonatkoztatási rendszerhez képest adjuk meg, ahhoz viszonyítjuk. pl. A vonatban utazó ember
Haladó mozgások A hely és a mozgás viszonylagos. A testek helyét, mozgását valamilyen vonatkoztatási ponthoz, vonatkoztatási rendszerhez képest adjuk meg, ahhoz viszonyítjuk. pl. A vonatban utazó ember
Mérnöki alapok 11. előadás
 Mérnöki alapok 11. előadás Készítette: dr. Váradi Sándor Budapesti Műszaki és Gazdaságtudományi Egyetem Gépészmérnöki Kar Hidrodinamikai Rendszerek Tanszék 1111, Budapest, Műegyetem rkp. 3. D ép. 334.
Mérnöki alapok 11. előadás Készítette: dr. Váradi Sándor Budapesti Műszaki és Gazdaságtudományi Egyetem Gépészmérnöki Kar Hidrodinamikai Rendszerek Tanszék 1111, Budapest, Műegyetem rkp. 3. D ép. 334.
MTZ 320 MTZ 320 MÛSZAKI ADATOK MÉRETEK ÉS TÖMEGADATOK MOTOR ERÕÁTVITEL KORMÁNYMÛ HAJTOTT ELSÕ TENGELY ELEKTROMOS BERENDEZÉSEK FÉKBERENDEZÉS
 MTZ 320 vízhûtéses dízelmotor. LDW1503CHD Teljesítmény, kw (LE): 22 (30) Névleges fordulatszám, ford/min: 3 000 Hengerek száma: 3 Furat löket, mm: 88 85 Hengerûrtartalom, cm 3 : 1 551 Maximális nyomaték,
MTZ 320 vízhûtéses dízelmotor. LDW1503CHD Teljesítmény, kw (LE): 22 (30) Névleges fordulatszám, ford/min: 3 000 Hengerek száma: 3 Furat löket, mm: 88 85 Hengerûrtartalom, cm 3 : 1 551 Maximális nyomaték,
Mechanika Kinematika. - Kinematikára: a testek mozgását tanulmányozza anélkül, hogy figyelembe venné a kiváltó
 Mechanika Kinematika A mechanika a fizika része mely a testek mozgásával és egyensúlyával foglalkozik. A klasszikus mechanika, mely a fénysebességnél sokkal kisebb sebességű testekre vonatkozik, feloszlik:
Mechanika Kinematika A mechanika a fizika része mely a testek mozgásával és egyensúlyával foglalkozik. A klasszikus mechanika, mely a fénysebességnél sokkal kisebb sebességű testekre vonatkozik, feloszlik:
Tájékoztató. 1. A nem közúti mozgó gépekbe, mobil berendezésekbe beépített vagy beépítendő belső égésű motorok teljesítményének meghatározása.
 Tájékoztató A mezőgazdasági gépeket gyártók és forgalmazók részére A mezőgazdasági gépkatalógusba bejelentett illetve bejelentésre kerülő, belsőégésű motorral rendelkező, traktorok, önjáró mezőgazdasági
Tájékoztató A mezőgazdasági gépeket gyártók és forgalmazók részére A mezőgazdasági gépkatalógusba bejelentett illetve bejelentésre kerülő, belsőégésű motorral rendelkező, traktorok, önjáró mezőgazdasági
Mindent tudni akarok...
 Mindent tudni akarok... Műszaki vizsga. A gépjármű tulajdonosok közül, egyesek számára örök talány, a többség azonban ismeri a menetét. Személygépkocsit, gépjárművet tulajdonolni kötelezettséggel is jár.
Mindent tudni akarok... Műszaki vizsga. A gépjármű tulajdonosok közül, egyesek számára örök talány, a többség azonban ismeri a menetét. Személygépkocsit, gépjárművet tulajdonolni kötelezettséggel is jár.
28. Nagy László Fizikaverseny Szalézi Szent Ferenc Gimnázium, Kazincbarcika február 28. március osztály
 1. feladat a) A négyzet alakú vetítővászon egy oldalának hossza 1,2 m. Ahhoz, hogy a legnagyobb nagyításban is ráférjen a diafilm-kocka képe a vászonra, és teljes egészében látható legyen, ahhoz a 36 milliméteres
1. feladat a) A négyzet alakú vetítővászon egy oldalának hossza 1,2 m. Ahhoz, hogy a legnagyobb nagyításban is ráférjen a diafilm-kocka képe a vászonra, és teljes egészében látható legyen, ahhoz a 36 milliméteres