Orientáció és skálázás invariáns. Darya Frolova, Denis Simakov, David Lowe diáit is felhasználva
|
|
|
- Alexandra Fülöp
- 8 évvel ezelőtt
- Látták:
Átírás
1 Invariáns képjellemzők detektálása és követése Orientáció és skálázás invariáns jellemzők detektálása és követése Darya Frolova, Denis Simakov, David Lowe diáit is felhasználva

2 Detektálás és követés - alkalmazások Képillesztés (panoráma) 3D rekonstrukció Mozgáskövetés Alakfelismerés Indexálás képi adatbázisokban Robot navigáció

3 Milyen megfeleltetéseket látunk a példa képsorozaton? Képzeletben klikkeljünk a képeken összetartozó pontpárokra! És mindezt algoritmikusan hogyan is lehetne megfogalmazni? 3

4 Alkalmazási példák képekkel illusztrálva:

5 Képillesztés by Diva Sian by swashford 5

6 Képillesztés ez nehezebb eset by Diva Sian by scgbt 6

7 Képillesztés ez még nehezebb eset NASA Mars Rover images 7

8 Hogyan illesszünk? (ld. kis színes négyzeteket) NASA Mars Rover images with SIFT feature matches Figure by Noah Snavely 8

9 Panorámakép készítés lépései Képsorozat illesztés szükséges

10 Panorámakép készítés lépései 1.Képjellemző pontok detektálása mindkét képen

11 Panorámakép készítés lépései 1.Képjellemző pontok detektálása mindkét képen 2.Összetartozó pontpárok megkeresése

12 Panorámakép készítés lépései 1.Képjellemző pontok detektálása mindkét képen 2.Összetartozó t pontpárok megkeresése 3.A megtalált összetartozó pontok segítségével az illesztés (homography)

13 Hogyan? (algoritmusok)

14 Mit akarunk általában? Ugyanazon érdekes pontok gy p detektálása képenként, függetlenül a képről-képre elszenvedett jelentős képtorzulásoktól

15 Invarianciát akarunk! A jó jellemző ellenáll a lehető legtöbb torzításnak a képek sorozatán keresztül 15

16 Képtorzulások transzformációs modellje Geometriai torzítás: (ismétlés) elforgatás hasonlóság (elforgatás + skálázás Affin tr. (irányfüggő skálázás) Fotometriai torzítás: Affin intenzitás változás (I a I+b)
 Fotometriai torzítás: Affin")
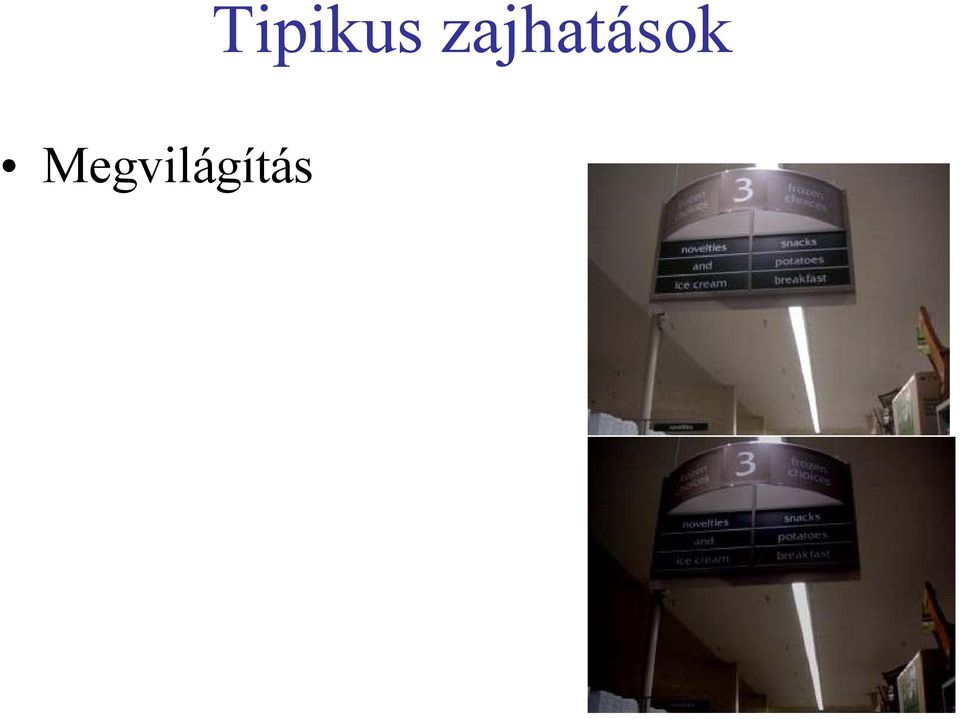
17 Tipikus zajhatások Megvilágítás 17
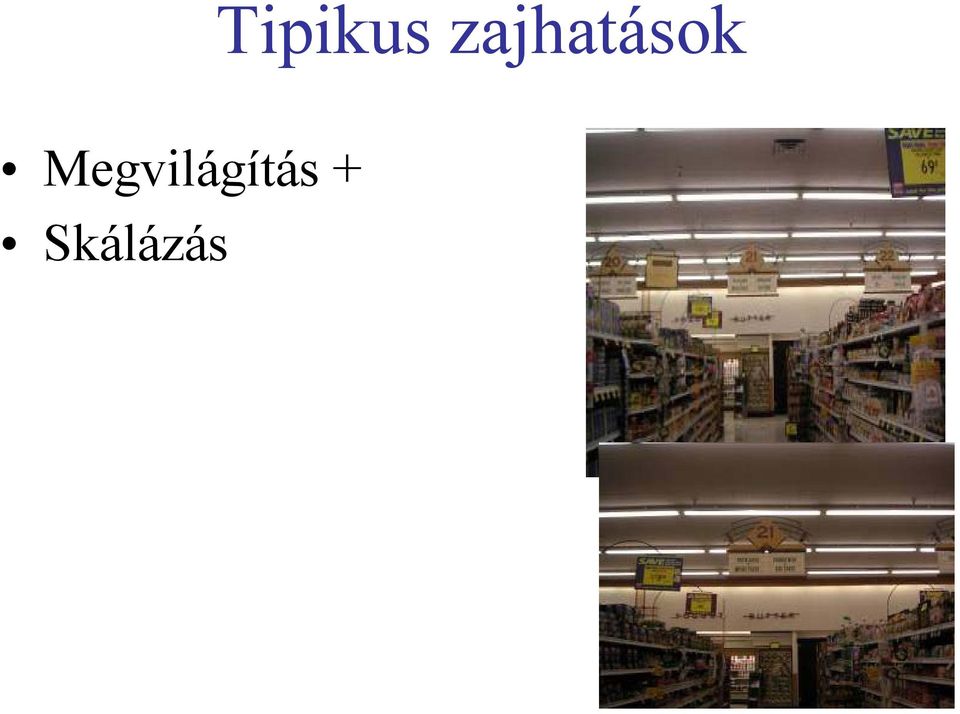
18 Tipikus zajhatások Megvilágítás + Skálázás 18
19 Tipikus zajhatások Megvilágítás + Skálázás ás + Elforgatás 19

20 Tipikus zajhatások Megvilágítás + Skálázás + Elforgatás + Affin transzformáció + 20

21 (Jellemző) )pont leírás Ezeket a jellemzőket tehát hogyan illesszük?? Pont leírás legyen: 1. Invariáns a zajokra 2. Megkülönböztető ő (egyedi)
22 Képjellemzők 1..pobé probléma: Ugyanazon pontokat függetlenül megtalálni mindkét képen Nincs esély a későbbi illesztésre! OK Képről-képre p reprodukálható hatású pontdetektor kellene! deniss/vis Darya Frolova, Denis Simakov The Weizmann ion_spring04/files/invariantfeatur Institute of Science res.ppt
23 Képjellemzők 2. probléma: Minden detektált ponthoz megtalálni az illeszkedőt a következő képen ep? Képről-képre megbízható és megkülönböztető hatású pontleíró is kellene! deniss/vision_spring04/files/ /InvariantFeatures.ppt Darya Frolova, Denis Simakov The Weizmann Institute of Science
24 Legegyszerűbb illesztés (eddig) 1: Korrelációval Már többször hivatkoztam erre a megoldásra 24
25 Legegyszerűbb illesztés (eddig) 1: Kielégítően működik ha: Korrelációval l leginkább csak elmozdulás van pl. sztereo, motion sztereo kis mozgásokra Viszont: egyéb torzításokra nem túl invariáns Kicsi az egyes kulcspontokat megkülönböztető képessége (egyedisége) 25
26 Legegyszerűbb illesztés (eddig) 2: Hough Transzformáció Eredeti kép Canny éldetektálás Hough egyenes keresés Hough egyenes-paraméter tér Már láttuk ezt is 26
27 Legegyszerűbb illesztés (eddig) 3: epipoláris pp geometria L U C C Többnézetű geometriánál majd részletesen, Most csak az alapelv 27 De az ábra feltételezi a kalibrált sztereó elrendezést
28 Legegyszerűbb illesztés (eddig) 4: Harris sarokpont detektor A Harris operátor különösen érzékeny éken a skálázásraásra 1x 7x
29 Legegyszerűbb illesztés (eddig) 5 Textura követés SSD (Sum-of-Squared-Differences) hiba minimalizálással keressük meg a legjobb illeszkedést mintakép A kezdő képkockán megtalálva Piros keret: a kiinduló helyzet a következő képen Esetünkben feltétlen valósidejűség kell: és a keresési idő mennyi?
30 Még robusztusabban detektálható és illeszthető releváns jellemzők (Interest Point) Az elméleti rész viszonylag friss algoritmusokkal bővithető, például: KLT ( ) Kanade-Lucas-Tomasi feature tracker SIFT (1999) Scale Invariant Feature Transform SURF (2006) Speeded-Up Robust Features.. Jelentőségükhöz igazodóan számos platformra van nyitott forrású implementációjuk 30
31 Scale Invariant Feature Transform (SIFT) A képfeldolgozás elméletének talán egyik legeredetibb, új (2000-es évek!) ötlete 31
32 Ismétlés: Harris Detektor jellemzői Elforgatás invariancia?
33 Ismétlés: Harris Detektor jellemzői Elforgatás invariancia? A sajátvektor ellipszis is forog de a sajátértékek változatlanok maradnak R sarokság mérték tehát invariáns az elforgatásra
34 Ismétlés: Harris Detektor jellemzői Megvilágítás invariancia?
35 Ismétlés: Harris Detektor jellemzői Az additív és multiplikatív intenzitásváltozással szemben részleges az algoritmus invarianciája Intenzitás eltolás: mivel a Harris csak deriváltakkal operál => invariáns intenzitás eltolásra I I + b Intenzitás skálázás: I a I OK, kivéve az elégségesen nagy R értéket jellemző küszöb környékén (ha a nem a sarokság, hanem a multiplikatív intenzitásváltozás miatt kerül át a pont a másik kategóriába) küszöb R R x (képkoordináta) x (képkoordináta)
36 Ismétlés: Harris Detektor jellemzői Skálázás invariancia? kép Zoom-olt kép
37 Ismétlés: Harris Detektor jellemzői Neminvariáns a Harris a képskálázásra! Minden pont élpontnak lesz Sarok! minősítve Darya Frolova, Denis Simakov The Weizmannn Institute of Science tures.ppt
38 Közbenső megjegyzések Sokat beszéltem eddig is a robusztusan detektálható és követhető jellemzőkről, de a követhetőség (egyediség) algoritmikusan kiszámítható mértékéről nagyvonalúan hallgattam (eddig) Először abban kellene biztosra mennünk, hogy ugyanazon érdekes pontokat (pl. sarokpontok) fogjuk mindegyik képen megtalálni, hogy a későbbi lépésben a követésre (párosításra) egyáltalán esélyünk legyen! Tehát, ha pl. sarokpontokat detektálunk akkor azok legyenek relatíve kis számúak ( nagyon sarkok ), és a geometriai skálázásra is tegyük valahogy érzéketlenné a detektálást! 38
39 Skálázás- invariáns függvény kell (egy példa) 39
40 Skálázásra invariáns detektálás Különböző méretű régiókat (pl. köröket) nézzünk meg az érdekes pontok körül Az összehasonlítható régiókon belül hasonló képrészletet látnánk mindkét képen A képjellemzők ugyanúgy néznének ki mindkét lokális operátoron belül.
41 Skálázásra á invariánsiá detektálás A probléma: hogyan határozzuk meg az összetartozó köröket függetlenül, vagyis mindkét képen külön-külön is? Meghatározható az érdekes pontok környezetének egy karakterisztikus (képről-képre állandóra normálható) skálafaktora?
42 Ismétlés: Skálázás- invariáns detektálás Az alapötlet: Keressünk egy olyan függvényt, mely invariáns a körök átmérőjére (skálázás invariancia), vagyis a skálázástól á függetlenül ül azonos a választ kapunk k azonos képtartalomra Egyszerű példa: átlagos intenzitás (azonos tartalmú régiókra nem változik a skálázással) A sugár függvényében ábrázolva a függvényt f kép 1 f kép 2 skálafaktor = 1/2 Régió nagyság Régió nagyság
43 Skálázás-invariáns detektálás Az alapötlet: Vegyük a tetszőleges függvény lokális maximumát (a változó sugár fv.-ben) megfigyelés: az a régió nagyság, amelynél la maximum adódik dik invariáns a kép skálázásra, csakis az ablak alatti képtartalomtól függ! Fontos: ez a skála-független régió méret minden képen - függetlenül a többi képtől- meghatározható! f kép 1 f kép 2 skála = 1/2 s 1 Régió nagyság s 2 Régió nagyság
44 Skálázás- invariáns detektálás Egy jó függvény kellene a skálázás detektálásra f rossz f rossz f jó! Régió méret Régió méret Régió méret Általában képekre igaz: az lesz egy jó függvény, amely kontrasztra (éles lokális intenzitás változásra) reagál
45 Skálázás- invariáns Harris detektor Harris-Laplacian 1 skálázás Keressük meg a lokális maximumokat az alábbi y műveletekre: ű l t k Harris sarokpont operátorral az x,y képen Laplace operátorral a különböző ő újraskálázási faktor értékek mentén Harris x Laplacia an 1 K.Mikolajczyk, C.Schmid. Indexing Based on Scale Invariant Interest Points. ICCV 2001
46 SIFT: a skálázás képtér extrémum keresés algoritmus Skálázás képtér piramis épitése 46
47 SIFT: a skálázás képtér extrémum keresés algoritmus A DOG függvényre a képtérben és a skála mentén is megkeressük a lokális maximumokat (egyenként az alatta és felette lévő skálaszinttel összevetve) 47
48 A csíkok Difference-of-Gaussian szűrővel megszűrve a b c A következő dián megjelenített értékek pirossal 48
49 Harris-Laplacian vs. DoG (SIFT) Harris-Laplacian 1 Keressük a lokális maximumokat az alábbi műveletekre: Harris sarokpont operátor az x,y képen Laplace operátor különböző újraskálázási faktor mentén skálázás y Harris x Laplacia an SIFT (Lowe) 2 Keressük a lokális maximumokat az alábbi műveletekre: DoG (Difference of Gaussians) operátor az x,y képen és az újraskálázási faktor mentén skálázás y DoG DoG x 1 K.Mikolajczyk, C.Schmid. Indexing Based on Scale Invariant Interest Points. ICCV D.Lowe. Distinctive Image Features from Scale-Invariant Keypoints. Accepted to IJCV 2004
50 Laplace vs. DoG Skálázási faktort jól normáló (mert attól arányosan függő relációban lévő) függvények összehasonlitása 50
51 Példa: Skálázás- invariáns detektálásra Az ötlet egyszerű 1D bemutatása: 3 különböző szélességű csíkkal 1D csíkok 1D képi ábrázolás Elkenés növekvő szélességű Gauss szűrővel skálázás 1D képsík 51
52 Skálázás- invariáns detektálás 52
53 Gaussian és Difference-of-Gaussian szűrők 53
54 A csíkok Difference-of-Gaussian szűrve scale space 54
55 A DoG szűrés utáni csúcsérték arányos a csíkszélességgel (csíkok különböző skálafaktor esetén): [1.7, 3, 5.2]./ [5, 9, 15] = a sigma = 1.7 b sigma = 3 c sigma = 5.2 Diff of Gauss szűrő válaszfüggvénye
56 [1.7, 3, 5.2]./ [5, 9, 15] = Figyeljük meg: A maximális válaszú szűrő által favorizált favorizált csík minden felbontás mellett ugyanolyan relációban van az őt favorizáló szűrővel (a szűrő zéró- átmenetei mindig kb. az adott csík szélére esnek) Vagyis a skála-kép analízis minden csíkból kiszedi a skálafüggést. Ez a jelenség általánosítható a vizsgált 2D képekre is. 56
57 Skála invariáns detektorok összehasonlítása Repeatability rate = megtalált illeszkedés keresett illeszkedés K.Mikolajczyk, C.Schmid. Indexing Based on Scale Invariant Interest Points. ICCV 2001
58 Skála-invariáns jellemző detektálás (összefoglalás) adott két kép azonos valós látványról, de nagy skálázási eltéréssel cél: megtalálni az azonos interest pontokat (jellemzőket) mindkét képen Megoldás: egy megfelelően megválasztott függvény lokális maximumát megkeresni a kép és skálafaktor függvényében Megismert konkrét módszerek: 1. Harris-Laplacian i [Mikolajczyk, k Schmid]: Laplace szerint lokális maximumot keresni a skála mentén + Harris szerint lokális maximumot keresni a képen 2. SIFT [Lowe]: Difference of Gaussians szerint lokális maximumot keresni a [ ] skála mentén és a képen egyaránt
59 Lokális Invariáns jellemzők előnyös tulajdonságai Lokális jelleg: ezért pl. kevésbé érzékeny takarásra, Megkülönböztethetőség: segítségével nagyobb képi adatbázisban is eséllyel lehet keresni egyezőségeket Mennyiség: sok jelllemző (interest point) kereshető Hatékonyság: pl. valósidejűség Univerzalitás: az alapelv könnyen kiterjeszthető a legkülönbözőbb jellemző típusokra mindegyiket robusztusabbá téve
60 Hogyan tovább? Megvannak a skála- és rotáció-független (invariáns és megkülönböztethető) jellemzők ( interest points ) Megvannak a skálázási faktorok Megvannak az orientációk iók A továbbiakban ezeket a pontokat kell úgy lí leírni i(descriptor), it )hogy képről-képre beazonosíthatók legyenek
61 Emlékeztető: Képjellemzők 1..pobé probléma: Ugyanazon pontokat függetlenül megtalálni mindkét képen Nincs esély a későbbi illesztésre! OK Képről-képre p reprodukálható hatású detektor megtalálva! deniss/vis Darya Frolova, Denis Simakov The Weizmann ion_spring04/files/invariantfeatur Institute of Science res.ppt
62 Emlékeztető: Képjellemzők 2. probléma: Minden detektált ponthoz megtalálni az illeszkedőt a következő képen? Képről-képre megbízható és megkülönböztető hatású leíró is kell még!
63 Megoldás: Jellemző pont leírása A megtalált jellemzőket hogyan is illesszük?? Pont leíró legyen: 1. Invariáns 2. Megkülönböztető ő (egyedi)
64 SIFT interest point leirás 1. Veszünk egy 16 x16 ablakot a keypoint körül 2. 4x4 cellákra bontjuk 3. Minden cellában kiszámoljuk a gradiensek hisztogramját 16 hisztogramm x 8 orientáció = 128 értékű jellemző vektorral keressük az illeszkedéseket 64
65 SIFT interest point leirás Megkülönböztető (jellemző környezetének egyediségét keresi): Egyetlen jellemző pont is jó eséllyel korrektül illeszthető egy nagyobb adatbázisba (sok képen is megtalálva a párját ). Skálázás és rotáció invariáns Továbbá: részlegesen invariáns A kamera 3D-ben való nézőpontjának változására Kb. 60 fokig az elforgatásra Megvilágítás változásra Gyorsan számítható (real-time implementációk) 65
66 SIFT jellemző vektor generálás 1. Detektálás: ugyanazokat a jellemző pontokat nagy eséllyel megtalálja képről-képre (függetlenül a sorozatban lévő többi képkockától) 2. Jellemző leírás: egy lokális környezet szerint (már megint csak egy ablak vizsgálatára szorítkozunk!) skálázás & elforgatás független leírást rendel a jellemzőkhöz (többi jellemzőtől függetlenül kiszámítva) 3. Illesztés: megkeresni a leginkább hasonló (ld. különböző távolságmérték definíciók) leírókkal rendelkező jellemzőket a másik képen Detektált pontok Pont leírás megjegyzés: itt a nézőpont is más nem csak panoráma felvétel!
67 SIFT jellemző vektor generálás Egy 4x4 mezőben küszöbözött orientációkat számolunk a gradiensek nagyságával súlyozva 8 lehetséges orientáció x 4x4 mező = 128 dimenziós jellemző leírás Csak egy 2x2 részletet bemutatva a 4x4 mezőből
68 SIFT - Intenzitásváltozás invariancia i i biztosítása 128-dimenziós vektor normálásával (normálás 1-re)
69 Mit is kaptunk végeredményben? Képről-képre jól lokalizálható jellemzőket (interest points) Ezeket a jellemzőket (interest points) )jól megkülönböztető leírásokat (128 dimenziós vektorokkal) Ami ezek után már megtehető: Az egyes képeken függetlenül megtalált invariáns jellemző pontok illesztése képről képre a hozzájuk rendelt leírás alapján Azonosság (homography) robusztus meghatározása dacára a torzításoknak, takarásoknak, stb.
70 Demo recognition of a car t = 0 ms Five points from the template are correctly identified in the scene 70
71 Demo recognition of a car We will use a template of a car and try to match it against a scene in which this car is present template 71
72 Demo recognition of a car t = 400 ms Six points from the template are correctly identified in the scene, however also note the incorrect match in the right of the image 72
73 Demo recognition of a car t = 800 ms Six points from the template are correctly identified in the scene. 73
74 Demo recognition of a car t = 1200 ms six points from the template are correctly identified in the scene (one point dos not belong to the car however). 74
75 Demo recognition of a car t = 1600 ms More points are being recognized, two points are wrongly matched 75
76 Demo recognition of a car t = 2000 ms A lot of points are correctly matched (this is to be expected since the template was derived from this image). g) Two points are incorrectly matched 76
77 Lokális ablakműveletek Idő hiányában SIFT-el abbahagyjuk Pedig lehetne tovább épitkezni, csupán a valósidőben jól implementálható lokális műveletekre szoritkozva
78 Az eddigi lokális ablakműveletek rész g néhány általános tanulsága
79 A jó képfeldolgozási p g stratégia Az optimális képfeldolgozási útvonalak kiválasztásának és algoritmikus bejárásának képességét kell elsősorban megszerezni! Astratégia kétlépésben összefoglalva: 1. a megvalósítandó funkciókhoz megtalálni a legjobb algoritmust 2. az így megvalósítandó algoritmushoz megtalálni a legjobb architektúrát.
8. Pontmegfeleltetések
 8. Pontmegfeleltetések Kató Zoltán Képfeldolgozás és Számítógépes Grafika tanszék SZTE (http://www.inf.u-szeged.hu/~kato/teaching/) 2 Példa: panoráma kép készítés 1. Jellemzőpontok detektálása mindkét
8. Pontmegfeleltetések Kató Zoltán Képfeldolgozás és Számítógépes Grafika tanszék SZTE (http://www.inf.u-szeged.hu/~kato/teaching/) 2 Példa: panoráma kép készítés 1. Jellemzőpontok detektálása mindkét
4. Jellemző pontok kinyerése és megfeleltetése
 4. Jellemző pontok kinyerése és megfeleltetése Kató Zoltán Képfeldolgozás és Számítógépes Grafika tanszék SZTE (http://www.inf.u-szeged.hu/~kato/teaching/) 2 Jellemzők és megfeleltetésük A képfeldolgozás,
4. Jellemző pontok kinyerése és megfeleltetése Kató Zoltán Képfeldolgozás és Számítógépes Grafika tanszék SZTE (http://www.inf.u-szeged.hu/~kato/teaching/) 2 Jellemzők és megfeleltetésük A képfeldolgozás,
és követés Dr. Loványi István BME-IIT 2014 április
 Él-, sarok-, minta detektálás és követés Dr. Loványi István BME-IIT 2014 április Megoldandó feladatok Jó jellemző felismerés (2D) Jó jellemzők követése (2D) 3D rekonstrukció (3D) önkalibráció 3D struktúra
Él-, sarok-, minta detektálás és követés Dr. Loványi István BME-IIT 2014 április Megoldandó feladatok Jó jellemző felismerés (2D) Jó jellemzők követése (2D) 3D rekonstrukció (3D) önkalibráció 3D struktúra
Sergyán Szabolcs szeptember 21.
 Éldetektálás Sergyán Szabolcs Budapesti Műszaki Főiskola Neumann János Informatikai Kar 2009. szeptember 21. Sergyán Sz. (BMF NIK) Éldetektálás 2009. szeptember 21. 1 / 28 Mit nevezünk élnek? Intuitív
Éldetektálás Sergyán Szabolcs Budapesti Műszaki Főiskola Neumann János Informatikai Kar 2009. szeptember 21. Sergyán Sz. (BMF NIK) Éldetektálás 2009. szeptember 21. 1 / 28 Mit nevezünk élnek? Intuitív
7. Sarokpontok detektálása
 7. Sarokpontok detektálása Kató Zoltán Képfeldolgozás és Számítógépes Grafika tanszék SZTE http://www.inf.u-szeged.hu/~kato/teaching/ 2 Jellemzők és megfeleltetésük A képfeldolgozás számítógépes látás
7. Sarokpontok detektálása Kató Zoltán Képfeldolgozás és Számítógépes Grafika tanszék SZTE http://www.inf.u-szeged.hu/~kato/teaching/ 2 Jellemzők és megfeleltetésük A képfeldolgozás számítógépes látás
Panorámakép készítése
 Panorámakép készítése Képregisztráció, 2009. Hantos Norbert Blaskovics Viktor Összefoglalás Panoráma (image stitching, planar mosaicing): átfedő képek összeillesztése Lépések: Előfeldolgozás (pl. intenzitáskorrekciók)
Panorámakép készítése Képregisztráció, 2009. Hantos Norbert Blaskovics Viktor Összefoglalás Panoráma (image stitching, planar mosaicing): átfedő képek összeillesztése Lépések: Előfeldolgozás (pl. intenzitáskorrekciók)
A médiatechnológia alapjai
 A médiatechnológia alapjai Úgy döntöttem, hogy a Szirányi oktatta előadások számonkérhetőnek tűnő lényegét kiemelem, az alapján, amit a ZH-ról mondott: rövid kérdések. A rész és az egész: összefüggések
A médiatechnológia alapjai Úgy döntöttem, hogy a Szirányi oktatta előadások számonkérhetőnek tűnő lényegét kiemelem, az alapján, amit a ZH-ról mondott: rövid kérdések. A rész és az egész: összefüggések
6. Modell illesztés, alakzatok
 6. Modell illesztés, alakzatok Kató Zoltán Képfeldolgozás és Számítógépes Grafika tanszék SZTE (http://www.inf.u-szeged.hu/~kato/teaching/) 2 ROBOSZTUS EGYENES ILLESZTÉS Egyenes illesztés Adott a síkban
6. Modell illesztés, alakzatok Kató Zoltán Képfeldolgozás és Számítógépes Grafika tanszék SZTE (http://www.inf.u-szeged.hu/~kato/teaching/) 2 ROBOSZTUS EGYENES ILLESZTÉS Egyenes illesztés Adott a síkban
Loványi István vizsgakérdései kidolgozva (béta)
") Loványi István vizsgakérdései kidolgozva (béta) 1. Morfológiai képfeldolgozás elmélete 1. Alapvető halmazműveletek, tulajdonságaik Műveletek: egyesítés (unió) metszet negált összetett műveletek... Tulajdonságok:
Loványi István vizsgakérdései kidolgozva (béta) 1. Morfológiai képfeldolgozás elmélete 1. Alapvető halmazműveletek, tulajdonságaik Műveletek: egyesítés (unió) metszet negált összetett műveletek... Tulajdonságok:
Grafikonok automatikus elemzése
 Grafikonok automatikus elemzése MIT BSc önálló laboratórium konzulens: Orosz György 2016.05.18. A feladat elsődleges célkitűzései o eszközök adatlapján található grafikonok feldolgozása, digitalizálása
Grafikonok automatikus elemzése MIT BSc önálló laboratórium konzulens: Orosz György 2016.05.18. A feladat elsődleges célkitűzései o eszközök adatlapján található grafikonok feldolgozása, digitalizálása
Éldetektálás, szegmentálás (folytatás) Orvosi képdiagnosztika 11_2 ea
 Orvosi képdiagnosztika 11_2 ea") Éldetektálás, szegmentálás (folytatás) Orvosi képdiagnosztika 11_2 ea Geometrikus deformálható modellek Görbe evolúció Level set módszer A görbe evolúció parametrizálástól független mindössze geometriai
Éldetektálás, szegmentálás (folytatás) Orvosi képdiagnosztika 11_2 ea Geometrikus deformálható modellek Görbe evolúció Level set módszer A görbe evolúció parametrizálástól független mindössze geometriai
A KLT (Kanade Lucas Tomasi) Feature Tracker Működése (jellegzetes pontok választása és követése)
 Feature Tracker Működése (jellegzetes pontok választása és követése)") A KL (Kanade Lucas omasi) Feature racker Működése (jellegzetes pontok választása és követése) Készítette: Hajder Levente 008.11.18. 1. Feladat A rendelkezésre álló videó egy adott képkockájából minél több
A KL (Kanade Lucas omasi) Feature racker Működése (jellegzetes pontok választása és követése) Készítette: Hajder Levente 008.11.18. 1. Feladat A rendelkezésre álló videó egy adott képkockájából minél több
Mit lássunk élnek? Hol van az él? Milyen vastag legyen? Hol
 Textúra Könnyű az élt megtalálni? Mi lássunk élnek? Mit lássunk élnek? Hol van az él? Milyen vastag legyen? Mit lássunk élnek? Zaj A zajpontokat nem szabad az élpontokkal összekeverni Egy vagy két él?
Textúra Könnyű az élt megtalálni? Mi lássunk élnek? Mit lássunk élnek? Hol van az él? Milyen vastag legyen? Mit lássunk élnek? Zaj A zajpontokat nem szabad az élpontokkal összekeverni Egy vagy két él?
3D számítógépes geometria és alakzatrekonstrukció
 3D számítógépes geometria és alakzatrekonstrukció 15. Digitális Alakzatrekonstrukció Méréstechnológia, Ponthalmazok regisztrációja http://cg.iit.bme.hu/portal/node/312 https://www.vik.bme.hu/kepzes/targyak/viiima01
3D számítógépes geometria és alakzatrekonstrukció 15. Digitális Alakzatrekonstrukció Méréstechnológia, Ponthalmazok regisztrációja http://cg.iit.bme.hu/portal/node/312 https://www.vik.bme.hu/kepzes/targyak/viiima01
6. Éldetektálás. Kató Zoltán. Képfeldolgozás és Számítógépes Grafika tanszék SZTE (http://www.inf.u-szeged.hu/~kato/teaching/)
") 6. Éldetektálás Kató Zoltán Képeldolgozás és Számítógépes Graika tanszék SZTE (http://www.in.u-szeged.hu/~kato/teaching/) 2 Élek A képen ott található él, ahol a kép-üggvény hirtelen változik. A kép egy
6. Éldetektálás Kató Zoltán Képeldolgozás és Számítógépes Graika tanszék SZTE (http://www.in.u-szeged.hu/~kato/teaching/) 2 Élek A képen ott található él, ahol a kép-üggvény hirtelen változik. A kép egy
3D - geometriai modellezés, alakzatrekonstrukció, nyomtatás
 3D - geometriai modellezés, alakzatrekonstrukció, nyomtatás 15. Digitális Alakzatrekonstrukció Méréstechnológia, Ponthalmazok regisztrációja http://cg.iit.bme.hu/portal/node/312 https://www.vik.bme.hu/kepzes/targyak/viiiav54
3D - geometriai modellezés, alakzatrekonstrukció, nyomtatás 15. Digitális Alakzatrekonstrukció Méréstechnológia, Ponthalmazok regisztrációja http://cg.iit.bme.hu/portal/node/312 https://www.vik.bme.hu/kepzes/targyak/viiiav54
Képszegmentáló eljárások. Orvosi képdiagnosztika 2018 ősz
 Képszegmentáló eljárások Orvosi képdiagnosztika 2018 ősz Képszegmentálás Anatómiai részek elkülönítés: pl. csontok, szív, erek, szürkefehér állomány, stb Vizsgálandó terület körbehatárolása: pl. tüdőterület
Képszegmentáló eljárások Orvosi képdiagnosztika 2018 ősz Képszegmentálás Anatómiai részek elkülönítés: pl. csontok, szív, erek, szürkefehér állomány, stb Vizsgálandó terület körbehatárolása: pl. tüdőterület
Képfeldolgozás Szegmentálás Osztályozás Képfelismerés Térbeli rekonstrukció
 Mesterséges látás Miről lesz szó? objektumok Bevezetés objektumok A mesterséges látás jelenlegi, technikai eszközökön alapuló világunkban gyakorlatilag azonos a számítógépes képfeldolgozással. Számítógépes
Mesterséges látás Miről lesz szó? objektumok Bevezetés objektumok A mesterséges látás jelenlegi, technikai eszközökön alapuló világunkban gyakorlatilag azonos a számítógépes képfeldolgozással. Számítógépes
Él: a képfüggvény hirtelen változása. Típusai. Felvételeken zajos formában jelennek meg. Lépcsős
 Él: a képfüggvény hirtelen változása Típusai Lépcsős Rámpaszerű Tetőszerű Vonalszerű él Felvételeken zajos formában jelennek meg Adott pontbeli x ill. y irányú változás jellemezhető egy f folytonos képfüggvény
Él: a képfüggvény hirtelen változása Típusai Lépcsős Rámpaszerű Tetőszerű Vonalszerű él Felvételeken zajos formában jelennek meg Adott pontbeli x ill. y irányú változás jellemezhető egy f folytonos képfüggvény
Képfeldolgozás jól párhuzamosítható
 Képfeldolgozás jól párhuzamosítható B. Wilkinson, M. Allen: Parallel Programming, Pearson Education Prentice Hall, 2nd ed., 2005. könyv 12. fejezete alapján Vázlat A képfeldolgozás olyan alkalmazási terület,
Képfeldolgozás jól párhuzamosítható B. Wilkinson, M. Allen: Parallel Programming, Pearson Education Prentice Hall, 2nd ed., 2005. könyv 12. fejezete alapján Vázlat A képfeldolgozás olyan alkalmazási terület,
Térbeli transzformációk, a tér leképezése síkra
 Térbeli transzformációk, a tér leképezése síkra Homogén koordináták bevezetése térben A tér minden P pontjához kölcsönösen egyértelműen egy valós (x, y, z) számhármast rendeltünk hozzá. (Descartes-féle
Térbeli transzformációk, a tér leképezése síkra Homogén koordináták bevezetése térben A tér minden P pontjához kölcsönösen egyértelműen egy valós (x, y, z) számhármast rendeltünk hozzá. (Descartes-féle
A 3D-2D leképezés alatt melyek maradnak robusztus képjellemzők?
 A 3D-2D leképezés alatt melyek maradnak robusztus képjellemzők? Vagyis mely képjellemzőket érdemes a vetületképekből kihámozni? Az attól függ Térbeli viszonyok egyenes méret párh. / szög alak síkok helyzete
A 3D-2D leképezés alatt melyek maradnak robusztus képjellemzők? Vagyis mely képjellemzőket érdemes a vetületképekből kihámozni? Az attól függ Térbeli viszonyok egyenes méret párh. / szög alak síkok helyzete
Tárgy. Forgóasztal. Lézer. Kamera 3D REKONSTRUKCIÓ LÉZERES LETAPOGATÁSSAL
 3D REKONSTRUKCIÓ LÉZERES LETAPOGATÁSSAL. Bevezetés A lézeres letapogatás a ma elérhet legpontosabb 3D-s rekonstrukciót teszi lehet vé. Alapelve roppant egyszer : egy lézeres csíkkal megvilágítjuk a tárgyat.
3D REKONSTRUKCIÓ LÉZERES LETAPOGATÁSSAL. Bevezetés A lézeres letapogatás a ma elérhet legpontosabb 3D-s rekonstrukciót teszi lehet vé. Alapelve roppant egyszer : egy lézeres csíkkal megvilágítjuk a tárgyat.
Képfeldolgozó eljárások áttekintés. Orvosi képdiagnosztika
 Képfeldolgozó eljárások áttekintés Orvosi képdiagnosztika Tartalomjegyzék Képmanipulációs eljárások Képjavítás (kontraszt módosítás, intenzitásviszonyok módosításahisztogram módosítás, zajszűrés) Képelemzés
Képfeldolgozó eljárások áttekintés Orvosi képdiagnosztika Tartalomjegyzék Képmanipulációs eljárások Képjavítás (kontraszt módosítás, intenzitásviszonyok módosításahisztogram módosítás, zajszűrés) Képelemzés
Transzformációk síkon, térben
 Transzformációk síkon, térben Leképezés, transzformáció Leképezés: Ha egy A ponttér pontjaihoz egy másik B ponttér pontjait kölcsönösen egyértelműen rendeljük hozzá, akkor ezt a hozzárendelést leképezésnek
Transzformációk síkon, térben Leképezés, transzformáció Leképezés: Ha egy A ponttér pontjaihoz egy másik B ponttér pontjait kölcsönösen egyértelműen rendeljük hozzá, akkor ezt a hozzárendelést leképezésnek
1. ábra Egy terület DTM-je (balra) és ugyanazon terület DSM-je (jobbra)
 és ugyanazon terület DSM-je (jobbra)") Bevezetés A digitális terepmodell (DTM) a Föld felszínének digitális, 3D-ós reprezentációja. Az automatikus DTM előállítás folyamata jelenti egyrészt távérzékelt felvételekből a magassági adatok kinyerését,
Bevezetés A digitális terepmodell (DTM) a Föld felszínének digitális, 3D-ós reprezentációja. Az automatikus DTM előállítás folyamata jelenti egyrészt távérzékelt felvételekből a magassági adatok kinyerését,
3. Szűrés képtérben. Kató Zoltán. Képfeldolgozás és Számítógépes Grafika tanszék SZTE (http://www.inf.u-szeged.hu/~kato/teaching/)
") 3. Szűrés képtérben Kató Zoltán Képfeldolgozás és Számítógépes Grafika tanszék SZTE http://www.inf.u-szeged.hu/~kato/teaching/ 2 Kép transzformációk típusai Kép értékkészletének radiometriai információ
3. Szűrés képtérben Kató Zoltán Képfeldolgozás és Számítógépes Grafika tanszék SZTE http://www.inf.u-szeged.hu/~kato/teaching/ 2 Kép transzformációk típusai Kép értékkészletének radiometriai információ
ACM Snake. Orvosi képdiagnosztika 11. előadás első fele
 ACM Snake Orvosi képdiagnosztika 11. előadás első fele ACM Snake (ismétlés) A szegmentáló kontúr egy paraméteres görbe: x Zs s X s, Y s,, s A szegmentáció energia funkcionál minimalizálása: E x Eint x
ACM Snake Orvosi képdiagnosztika 11. előadás első fele ACM Snake (ismétlés) A szegmentáló kontúr egy paraméteres görbe: x Zs s X s, Y s,, s A szegmentáció energia funkcionál minimalizálása: E x Eint x
A keveredési réteg magasságának detektálása visszaszóródási idősorok alapján
 ORSZÁGOS METEOROLÓGIAI SZOLGÁLAT A keveredési réteg magasságának detektálása visszaszóródási idősorok alapján Timár Ágnes Alapítva: 1870 A planetáris határréteg (PHR) Mechanikus és termikus turbulencia
ORSZÁGOS METEOROLÓGIAI SZOLGÁLAT A keveredési réteg magasságának detektálása visszaszóródási idősorok alapján Timár Ágnes Alapítva: 1870 A planetáris határréteg (PHR) Mechanikus és termikus turbulencia
Éldetektálás. Digitális képelemzés alapvető algoritmusai. Képi élek. Csetverikov Dmitrij. A Canny-éldetektor Az éldetektálás utófeldolgozása
 Éldetektálás Digitális képelemzés alapvető algoritmusai 1 Alapvető képi sajátságok Csetverikov Dmitrij Eötvös Lóránd Egyetem, Budapest csetverikov@sztaki.hu http://vision.sztaki.hu Informatikai Kar Az
Éldetektálás Digitális képelemzés alapvető algoritmusai 1 Alapvető képi sajátságok Csetverikov Dmitrij Eötvös Lóránd Egyetem, Budapest csetverikov@sztaki.hu http://vision.sztaki.hu Informatikai Kar Az
Idő-frekvencia transzformációk waveletek
 Idő-frekvencia transzformációk waveletek Pokol Gergő BME NTI Üzemi mérések és diagnosztika 2015. április 23. Vázlat Alapfogalmak az idő-frekvencia síkon Rövid idejű Fourier-transzformáció spektrogram Folytonos
Idő-frekvencia transzformációk waveletek Pokol Gergő BME NTI Üzemi mérések és diagnosztika 2015. április 23. Vázlat Alapfogalmak az idő-frekvencia síkon Rövid idejű Fourier-transzformáció spektrogram Folytonos
Alap-ötlet: Karl Friedrich Gauss ( ) valószínűségszámítási háttér: Andrej Markov ( )
 valószínűségszámítási háttér: Andrej Markov ( )") Budapesti Műszaki és Gazdaságtudományi Egyetem Gépészmérnöki Kar Hidrodinamikai Rendszerek Tanszék, Budapest, Műegyetem rkp. 3. D ép. 334. Tel: 463-6-80 Fa: 463-30-9 http://www.vizgep.bme.hu Alap-ötlet:
Budapesti Műszaki és Gazdaságtudományi Egyetem Gépészmérnöki Kar Hidrodinamikai Rendszerek Tanszék, Budapest, Műegyetem rkp. 3. D ép. 334. Tel: 463-6-80 Fa: 463-30-9 http://www.vizgep.bme.hu Alap-ötlet:
6. gyakorlat. Gelle Kitti. Csendes Tibor Somogyi Viktor. London András. jegyzetei alapján
 Közelítő és szimbolikus számítások 6. gyakorlat Sajátérték, Gersgorin körök Készítette: Gelle Kitti Csendes Tibor Somogyi Viktor Vinkó Tamás London András Deák Gábor jegyzetei alapján . Mátrixok sajátértékei
Közelítő és szimbolikus számítások 6. gyakorlat Sajátérték, Gersgorin körök Készítette: Gelle Kitti Csendes Tibor Somogyi Viktor Vinkó Tamás London András Deák Gábor jegyzetei alapján . Mátrixok sajátértékei
Mozgáskövetés. Dr. Loványi István BME-IIT. (Mubarak Shah, Gonzales-Woods Steve Seitz diáinak felhasználásával)
") Mozgáskövetés Dr. Loványi István BME-IIT 2014. április (Mubarak Shah, Gonzales-Woods Steve Seitz diáinak felhasználásával) Mozgás követési alternatívák 1. Robusztus képjellemzők követésével? é (ezt részletesen
Mozgáskövetés Dr. Loványi István BME-IIT 2014. április (Mubarak Shah, Gonzales-Woods Steve Seitz diáinak felhasználásával) Mozgás követési alternatívák 1. Robusztus képjellemzők követésével? é (ezt részletesen
Képfeldolgozás jól párhuzamosítható
 Képeldolgozás jól párhuzamosítható B. Wilkinson, M. Allen: Parallel Programming, Pearson Education Prentice Hall, nd ed., 005. könyv. ejezete alapján Vázlat A képeldolgozás olyan alkalmazási terület, amely
Képeldolgozás jól párhuzamosítható B. Wilkinson, M. Allen: Parallel Programming, Pearson Education Prentice Hall, nd ed., 005. könyv. ejezete alapján Vázlat A képeldolgozás olyan alkalmazási terület, amely
2014/2015. tavaszi félév
 Hajder L. és Valasek G. hajder.levente@sztaki.mta.hu Eötvös Loránd Tudományegyetem Informatikai Kar 2014/2015. tavaszi félév Tartalom Geometria modellezés 1 Geometria modellezés 2 Geometria modellezés
Hajder L. és Valasek G. hajder.levente@sztaki.mta.hu Eötvös Loránd Tudományegyetem Informatikai Kar 2014/2015. tavaszi félév Tartalom Geometria modellezés 1 Geometria modellezés 2 Geometria modellezés
Automatikus irányzás digitális képek. feldolgozásával TURÁK BENCE DR. ÉGETŐ CSABA
 Automatikus irányzás digitális képek feldolgozásával TURÁK BENCE DR. ÉGETŐ CSABA Koncepció Robotmérőállomásra távcsővére rögzített kamera Képek alapján a cél automatikus detektálása És az irányzás elvégzése
Automatikus irányzás digitális képek feldolgozásával TURÁK BENCE DR. ÉGETŐ CSABA Koncepció Robotmérőállomásra távcsővére rögzített kamera Képek alapján a cél automatikus detektálása És az irányzás elvégzése
Minták automatikus osztályba sorolása a mintát leíró jellemzők alapján. Típusok: felügyelt és felügyelet nélküli tanuló eljárások
 Minták automatikus osztályba sorolása a mintát leíró jellemzők alapján Típusok: felügyelt és felügyelet nélküli tanuló eljárások Különbség: előbbinél szükséges egy olyan tanulóhalmaz, ahol ismert a minták
Minták automatikus osztályba sorolása a mintát leíró jellemzők alapján Típusok: felügyelt és felügyelet nélküli tanuló eljárások Különbség: előbbinél szükséges egy olyan tanulóhalmaz, ahol ismert a minták
Sajátértékek és sajátvektorok. mf1n1a06- mf1n2a06 Csabai István
 Sajátértékek és sajátvektorok A fizika numerikus módszerei I. mf1n1a06- mf1n2a06 Csabai István Lineáris transzformáció Vektorok lineáris transzformációja: általános esetben az x vektor iránya és nagysága
Sajátértékek és sajátvektorok A fizika numerikus módszerei I. mf1n1a06- mf1n2a06 Csabai István Lineáris transzformáció Vektorok lineáris transzformációja: általános esetben az x vektor iránya és nagysága
GROVER-algoritmus. Sinkovicz Péter. ELTE, MSc II dec.15.
 ELTE, MSc II. 2011.dec.15. Áttekintés Feladat Algoritmus Kvantum keresési algoritmus áttekintése Input: N = 2 n elemű tömb, Ψ 1 = 0 1 kezdőállapot, f x0 (x) orákulum függvény. Output: x 0 keresett elem
ELTE, MSc II. 2011.dec.15. Áttekintés Feladat Algoritmus Kvantum keresési algoritmus áttekintése Input: N = 2 n elemű tömb, Ψ 1 = 0 1 kezdőállapot, f x0 (x) orákulum függvény. Output: x 0 keresett elem
Programozási segédlet
 Programozási segédlet Programozási tételek Az alábbiakban leírtam néhány alap algoritmust, amit ismernie kell annak, aki programozásra adja a fejét. A lista korántsem teljes, ám ennyi elég kell legyen
Programozási segédlet Programozási tételek Az alábbiakban leírtam néhány alap algoritmust, amit ismernie kell annak, aki programozásra adja a fejét. A lista korántsem teljes, ám ennyi elég kell legyen
Szélsőérték-számítás
 Szélsőérték-számítás Jelölések A következő jelölések mind az f függvény x szerinti parciális deriváltját jelentik: Ugyanígy az f függvény y szerinti parciális deriváltja: f x = xf = f x f y = yf = f y
Szélsőérték-számítás Jelölések A következő jelölések mind az f függvény x szerinti parciális deriváltját jelentik: Ugyanígy az f függvény y szerinti parciális deriváltja: f x = xf = f x f y = yf = f y
Felvétel készítése Képfeldolgozás (ábragyűjtemény) IV.
 IV.") Felvétel készítése Képfeldolgozás (ábragyűjtemény) IV. Dr. Kohut József 1. felbontás (resolution) 2. látómező (field of view, FOV) 3. tárgy-távolság (working distance) 4. érzékelő (sensor) 5. tárgy/mező
Felvétel készítése Képfeldolgozás (ábragyűjtemény) IV. Dr. Kohut József 1. felbontás (resolution) 2. látómező (field of view, FOV) 3. tárgy-távolság (working distance) 4. érzékelő (sensor) 5. tárgy/mező
Least Squares becslés
 Least Squares becslés A négyzetes hibafüggvény: i d i ( ) φx i A négyzetes hibafüggvény mellett a minimumot biztosító megoldás W=( d LS becslés A gradiens számítása és nullává tétele eredményeképp A megoldás
Least Squares becslés A négyzetes hibafüggvény: i d i ( ) φx i A négyzetes hibafüggvény mellett a minimumot biztosító megoldás W=( d LS becslés A gradiens számítása és nullává tétele eredményeképp A megoldás
FEGYVERNEKI SÁNDOR, Valószínűség-sZÁMÍTÁs És MATEMATIKAI
 FEGYVERNEKI SÁNDOR, Valószínűség-sZÁMÍTÁs És MATEMATIKAI statisztika 10 X. SZIMULÁCIÓ 1. VÉLETLEN számok A véletlen számok fontos szerepet játszanak a véletlen helyzetek generálásában (pénzérme, dobókocka,
FEGYVERNEKI SÁNDOR, Valószínűség-sZÁMÍTÁs És MATEMATIKAI statisztika 10 X. SZIMULÁCIÓ 1. VÉLETLEN számok A véletlen számok fontos szerepet játszanak a véletlen helyzetek generálásában (pénzérme, dobókocka,
Infobionika ROBOTIKA. X. Előadás. Robot manipulátorok II. Direkt és inverz kinematika. Készült a HEFOP P /1.0 projekt keretében
 Infobionika ROBOTIKA X. Előadás Robot manipulátorok II. Direkt és inverz kinematika Készült a HEFOP-3.3.1-P.-2004-06-0018/1.0 projekt keretében Tartalom Direkt kinematikai probléma Denavit-Hartenberg konvenció
Infobionika ROBOTIKA X. Előadás Robot manipulátorok II. Direkt és inverz kinematika Készült a HEFOP-3.3.1-P.-2004-06-0018/1.0 projekt keretében Tartalom Direkt kinematikai probléma Denavit-Hartenberg konvenció
Robotika. Relatív helymeghatározás Odometria
 Robotika Relatív helymeghatározás Odometria Differenciális hajtás c m =πd n /nc e c m D n C e n = hány mm-t tesz meg a robot egy jeladó impulzusra = névleges kerék átmérő = jeladó fölbontása (impulzus/ford.)
Robotika Relatív helymeghatározás Odometria Differenciális hajtás c m =πd n /nc e c m D n C e n = hány mm-t tesz meg a robot egy jeladó impulzusra = névleges kerék átmérő = jeladó fölbontása (impulzus/ford.)
Matematika A2 vizsga mgeoldása június 4.
 Matematika A vizsga mgeoldása 03. június.. (a (3 pont Definiálja az f(x, y függvény határértékét az (x 0, y 0 helyen! Megoldás: Legyen D R, f : D R. Legyen az f(x, y függvény értelmezve az (x 0, y 0 pont
Matematika A vizsga mgeoldása 03. június.. (a (3 pont Definiálja az f(x, y függvény határértékét az (x 0, y 0 helyen! Megoldás: Legyen D R, f : D R. Legyen az f(x, y függvény értelmezve az (x 0, y 0 pont
Az alak- és formalátás mechanizmusai
 Az alak- és formalátás mechanizmusai dr. Sáry Gyula 211. április 14. Alak- és formafelismerésünk robusztus, megbízható folyamat nekünk eredeti (másik) eredeti szemmozgás méret (távolság) fényviszonyok
Az alak- és formalátás mechanizmusai dr. Sáry Gyula 211. április 14. Alak- és formafelismerésünk robusztus, megbízható folyamat nekünk eredeti (másik) eredeti szemmozgás méret (távolság) fényviszonyok
Illesztés. Digitális képelemzés alapvető algoritmusai. Adatregistráció és -fúzió 1/2. Adatregistráció és -fúzió 2/2. Csetverikov Dmitrij
 Illesztés Digitális képelemzés alapvető algoritmusai Csetverikov Dmitrij Eötvös Lóránd Egyetem, Budapest csetverikov@sztaki.hu http://vision.sztaki.hu Informatikai Kar 1 Megfeleltetés és illesztés a számítógépes
Illesztés Digitális képelemzés alapvető algoritmusai Csetverikov Dmitrij Eötvös Lóránd Egyetem, Budapest csetverikov@sztaki.hu http://vision.sztaki.hu Informatikai Kar 1 Megfeleltetés és illesztés a számítógépes
Bevezetés az állapottér-elméletbe Dinamikus rendszerek állapottér reprezentációi
 Tartalom Bevezetés az állapottér-elméletbe Irányítható alak Megfigyelhetőségi alak Diagonális alak Állapottér transzformáció 2018 1 A szabályozáselmélet klasszikus, BODE, NICHOLS, NYQUIST nevéhez kötődő,
Tartalom Bevezetés az állapottér-elméletbe Irányítható alak Megfigyelhetőségi alak Diagonális alak Állapottér transzformáció 2018 1 A szabályozáselmélet klasszikus, BODE, NICHOLS, NYQUIST nevéhez kötődő,
Szenzorcsatolt robot: A szenzorcsatolás lépései:
 1. Mi a szenzorcsatolt robot, hogyan épül fel? Ismertesse a szenzorcsatolás lépéseit röviden az Egységes szenzorplatform architektúra segítségével. Mikor beszélünk szenzorfúzióról? Milyen módszereket használhatunk?
1. Mi a szenzorcsatolt robot, hogyan épül fel? Ismertesse a szenzorcsatolás lépéseit röviden az Egységes szenzorplatform architektúra segítségével. Mikor beszélünk szenzorfúzióról? Milyen módszereket használhatunk?
Keresztmetszet másodrendű nyomatékainak meghatározása
 BUDAPEST MŰSZAK ÉS GAZDASÁGTUDOMÁNY EGYETEM Keresztmetszet másodrendű nyomatékainak meghatározása Segédlet a Szilárdságtan c tárgy házi feladatához Készítette: Lehotzky Dávid Budapest, 205 február 28 ábra
BUDAPEST MŰSZAK ÉS GAZDASÁGTUDOMÁNY EGYETEM Keresztmetszet másodrendű nyomatékainak meghatározása Segédlet a Szilárdságtan c tárgy házi feladatához Készítette: Lehotzky Dávid Budapest, 205 február 28 ábra
CT/MRI képalkotás alapjai. Prof. Bogner Péter
 CT/MRI képalkotás alapjai Prof. Bogner Péter CT - computed tomography Godfrey N. Hounsfield Allan M. Cormack The Nobel Prize in Physiology or Medicine 1979 MRI - magnetic resonance imaging Sir Peter Mansfield
CT/MRI képalkotás alapjai Prof. Bogner Péter CT - computed tomography Godfrey N. Hounsfield Allan M. Cormack The Nobel Prize in Physiology or Medicine 1979 MRI - magnetic resonance imaging Sir Peter Mansfield
Képszűrés II. Digitális képelemzés alapvető algoritmusai. Laplace-operátor és approximációja. Laplace-szűrő és átlagolás. Csetverikov Dmitrij
 Képszűrés II Digitális képelemzés alapvető algoritmusai Csetverikov Dmitrij Eötvös Lóránd Egyetem, Budapest csetverikov@sztaki.hu http://vision.sztaki.hu Informatikai Kar 1 Laplace-szűrő 2 Gauss- és Laplace-képpiramis
Képszűrés II Digitális képelemzés alapvető algoritmusai Csetverikov Dmitrij Eötvös Lóránd Egyetem, Budapest csetverikov@sztaki.hu http://vision.sztaki.hu Informatikai Kar 1 Laplace-szűrő 2 Gauss- és Laplace-képpiramis
Képfeldolgozó eljárások áttekintés. Orvosi képdiagnosztika 9. ea ősz
 Képfeldolgozó eljárások áttekintés Orvosi képdiagnosztika 9. ea. 2015 ősz Tartalomjegyzék Képmanipulációs eljárások Képjavítás (kontraszt módosítás, intenzitásviszonyok módosításahisztogram módosítás,
Képfeldolgozó eljárások áttekintés Orvosi képdiagnosztika 9. ea. 2015 ősz Tartalomjegyzék Képmanipulációs eljárások Képjavítás (kontraszt módosítás, intenzitásviszonyok módosításahisztogram módosítás,
AUTOMATIKUS KÉPFELDOLGOZÁS A HADITECHNIKÁBAN A CELLULÁRIS NEURÁLIS HÁLÓZAT
 Buzási Tibor AUTOMATIKUS KÉPFELDOLGOZÁS A HADITECHNIKÁBAN A CELLULÁRIS NEURÁLIS HÁLÓZAT A következő bemutató témája a Celluláris Neurális Hálózat (CNN) technológiára épülő, a hagyományos képfeldolgozási
Buzási Tibor AUTOMATIKUS KÉPFELDOLGOZÁS A HADITECHNIKÁBAN A CELLULÁRIS NEURÁLIS HÁLÓZAT A következő bemutató témája a Celluláris Neurális Hálózat (CNN) technológiára épülő, a hagyományos képfeldolgozási
HÁROMDIMENZIÓS SZÁMÍTÓGÉPES LÁTÁS HAJDER LEVENTE
 HÁROMDIMENZIÓS SZÁMÍTÓGÉPES LÁTÁS HAJDER LEVENTE BEMUTATKOZÁS Hajder Levente (1975-?) Tanulmányok: BME első kísérlet 1993-1995 Kandó Kálmán Műszaki Főiskola (Ma: Óbudai Egyetem) 1995-1998 BME második,
HÁROMDIMENZIÓS SZÁMÍTÓGÉPES LÁTÁS HAJDER LEVENTE BEMUTATKOZÁS Hajder Levente (1975-?) Tanulmányok: BME első kísérlet 1993-1995 Kandó Kálmán Műszaki Főiskola (Ma: Óbudai Egyetem) 1995-1998 BME második,
Matematikai alapok és valószínőségszámítás. Középértékek és szóródási mutatók
 Matematikai alapok és valószínőségszámítás Középértékek és szóródási mutatók Középértékek A leíró statisztikák talán leggyakrabban használt csoportját a középértékek jelentik. Legkönnyebben mint az adathalmaz
Matematikai alapok és valószínőségszámítás Középértékek és szóródási mutatók Középértékek A leíró statisztikák talán leggyakrabban használt csoportját a középértékek jelentik. Legkönnyebben mint az adathalmaz
Transzformációk. Grafikus játékok fejlesztése Szécsi László 2013.02.26. t05-transform
 Transzformációk Grafikus játékok fejlesztése Szécsi László 2013.02.26. t05-transform Koordinátarendszerek: modelltér Koordinátarendszerek: világtér Koordinátarendszerek: kameratér up right z eye ahead
Transzformációk Grafikus játékok fejlesztése Szécsi László 2013.02.26. t05-transform Koordinátarendszerek: modelltér Koordinátarendszerek: világtér Koordinátarendszerek: kameratér up right z eye ahead
Csoportosítás. Térinformatikai műveletek, elemzések. Csoportosítás. Csoportosítás
 Csoportosítás Térinformatikai műveletek, elemzések Leíró (attribútum) adatokra vonatkozó kérdések, műveletek, elemzések, csoportosítások,... Térbeli (geometriai) adatokra vonatkozó kérdések, műveletek
Csoportosítás Térinformatikai műveletek, elemzések Leíró (attribútum) adatokra vonatkozó kérdések, műveletek, elemzések, csoportosítások,... Térbeli (geometriai) adatokra vonatkozó kérdések, műveletek
A szilícium nyomdetektor geometriai elrendezésének meghatározása
 MTA Wigner Kutatóközpont Budapest A szilícium nyomdetektor geometriai elrendezésének meghatározása Hidas Pál CMS Tracker DPG Budapest csoport CMS Budapest Debrecen munkaértekezlet A nyomdetektor geometriai
MTA Wigner Kutatóközpont Budapest A szilícium nyomdetektor geometriai elrendezésének meghatározása Hidas Pál CMS Tracker DPG Budapest csoport CMS Budapest Debrecen munkaértekezlet A nyomdetektor geometriai
Idő-frekvencia transzformációk waveletek
 Idő-frekvencia transzformációk waveletek Pokol Gergő BME NTI Üzemi mérések és diagnosztika 013. áprils 17. Vázlat Alapfogalmak az idő-frekvencia síkon Rövid idejű Fourier-transzformáció spektrogram Folytonos
Idő-frekvencia transzformációk waveletek Pokol Gergő BME NTI Üzemi mérések és diagnosztika 013. áprils 17. Vázlat Alapfogalmak az idő-frekvencia síkon Rövid idejű Fourier-transzformáció spektrogram Folytonos
3. Sztereó kamera. Kató Zoltán. Képfeldolgozás és Számítógépes Grafika tanszék SZTE (http://www.inf.u-szeged.hu/~kato/teaching/)
") 3. Sztereó kamera Kató Zoltá Képfeldolgozás és Számítógépes Grafika taszék SZTE (http://www.if.u-szeged.hu/~kato/teachig/) Sztereó kamerák Az emberi látást utáozza 3 Sztereó kamera pár Két, ugaazo 3D látvát
3. Sztereó kamera Kató Zoltá Képfeldolgozás és Számítógépes Grafika taszék SZTE (http://www.if.u-szeged.hu/~kato/teachig/) Sztereó kamerák Az emberi látást utáozza 3 Sztereó kamera pár Két, ugaazo 3D látvát
Bevezetés. Kató Zoltán. Képfeldolgozás és Számítógépes Grafika tanszék SZTE (http://www.inf.u-szeged.hu/~kato/teaching/)
") Bevezetés Kató Zoltán Képfeldolgozás és Számítógépes Grafika tanszék SZTE (http://www.inf.u-szeged.hu/~kato/teaching/) 2 Digitális képfeldolgozás digitális képfeldolgozás számítógépes grafika digitális
Bevezetés Kató Zoltán Képfeldolgozás és Számítógépes Grafika tanszék SZTE (http://www.inf.u-szeged.hu/~kato/teaching/) 2 Digitális képfeldolgozás digitális képfeldolgozás számítógépes grafika digitális
Az Ampère-Maxwell-féle gerjesztési törvény
 Az Ampère-Maxwell-féle gerjesztési törvény Maxwell elméleti meggondolások alapján feltételezte, hogy a változó elektromos tér örvényes mágneses teret kelt (hasonlóan ahhoz ahogy a változó mágneses tér
Az Ampère-Maxwell-féle gerjesztési törvény Maxwell elméleti meggondolások alapján feltételezte, hogy a változó elektromos tér örvényes mágneses teret kelt (hasonlóan ahhoz ahogy a változó mágneses tér
Konjugált gradiens módszer
 Közelítő és szimbolikus számítások 12. gyakorlat Konjugált gradiens módszer Készítette: Gelle Kitti Csendes Tibor Vinkó Tamás Faragó István Horváth Róbert jegyzetei alapján 1 LINEÁRIS EGYENLETRENDSZEREK
Közelítő és szimbolikus számítások 12. gyakorlat Konjugált gradiens módszer Készítette: Gelle Kitti Csendes Tibor Vinkó Tamás Faragó István Horváth Róbert jegyzetei alapján 1 LINEÁRIS EGYENLETRENDSZEREK
Egy általános iskolai feladat egyetemi megvilágításban
 Egy általános iskolai feladat egyetemi megvilágításban avagy mit kell(ene) tudnia egy 8.-osnak a matematika versenyeken Kunos Ádám Középiskolás pályázat díjkiosztó SZTE Bolyai Intézet 2011. november 12.
Egy általános iskolai feladat egyetemi megvilágításban avagy mit kell(ene) tudnia egy 8.-osnak a matematika versenyeken Kunos Ádám Középiskolás pályázat díjkiosztó SZTE Bolyai Intézet 2011. november 12.
ROBOT IRÁNYÍTÁS INFRAVÖRÖS LED TÖMBBEL
 TÁMOP-4.2.2.C-11/1/KONV-212-4 infokommunikációs technológiák ROBOT IRÁNYÍTÁS INFRAVÖRÖS LED TÖMBBEL A KUTATÁSI TERÜLET RÖVID MEGFOGALMAZÁSA TÁMOP-4.2.2.C-11/1/KONV-212-4 Célok: Növekvő érdeklődés a non-boolean
TÁMOP-4.2.2.C-11/1/KONV-212-4 infokommunikációs technológiák ROBOT IRÁNYÍTÁS INFRAVÖRÖS LED TÖMBBEL A KUTATÁSI TERÜLET RÖVID MEGFOGALMAZÁSA TÁMOP-4.2.2.C-11/1/KONV-212-4 Célok: Növekvő érdeklődés a non-boolean
Nem roncsoló tesztelés diszkrét tomográfiával
 Nem roncsoló tesztelés diszkrét tomográfiával Dr. Balázs Péter, adjunktus Képfeldolgozás és Számítógépes Grafika Tanszék SZTE TTIK, Informatikai Tanszékcsoport A teszteléshez használt CT berendezés lapdetektor
Nem roncsoló tesztelés diszkrét tomográfiával Dr. Balázs Péter, adjunktus Képfeldolgozás és Számítógépes Grafika Tanszék SZTE TTIK, Informatikai Tanszékcsoport A teszteléshez használt CT berendezés lapdetektor
10. Alakzatok és minták detektálása
 0. Alakzatok és mnták detektálása Kató Zoltán Képfeldolgozás és Számítógépes Grafka tanszék SZTE http://www.nf.u-szeged.hu/~kato/teachng/ 2 Hough transzformácó Éldetektálás során csak élpontok halmazát
0. Alakzatok és mnták detektálása Kató Zoltán Képfeldolgozás és Számítógépes Grafka tanszék SZTE http://www.nf.u-szeged.hu/~kato/teachng/ 2 Hough transzformácó Éldetektálás során csak élpontok halmazát
Branch-and-Bound. 1. Az egészértéketű programozás. a korlátozás és szétválasztás módszere Bevezető Definíció. 11.
 11. gyakorlat Branch-and-Bound a korlátozás és szétválasztás módszere 1. Az egészértéketű programozás 1.1. Bevezető Bizonyos feladatok modellezése kapcsán előfordulhat olyan eset, hogy a megoldás során
11. gyakorlat Branch-and-Bound a korlátozás és szétválasztás módszere 1. Az egészértéketű programozás 1.1. Bevezető Bizonyos feladatok modellezése kapcsán előfordulhat olyan eset, hogy a megoldás során
Rendezések. A rendezési probléma: Bemenet: Kimenet: n számot tartalmazó (a 1,a 2,,a n ) sorozat
 sorozat") 9. Előadás Rendezések A rendezési probléma: Bemenet: n számot tartalmazó (a 1,a 2,,a n ) sorozat Kimenet: a bemenő sorozat olyan (a 1, a 2,,a n ) permutációja, hogy a 1 a 2 a n 2 Rendezések Általánosabban:
9. Előadás Rendezések A rendezési probléma: Bemenet: n számot tartalmazó (a 1,a 2,,a n ) sorozat Kimenet: a bemenő sorozat olyan (a 1, a 2,,a n ) permutációja, hogy a 1 a 2 a n 2 Rendezések Általánosabban:
Szinguláris érték felbontás Singular Value Decomposition
 Szinguláris érték felbontás Singular Value Decomposition Borbély Gábor 7. április... Tétel (teljes SVD. Legyen A C m n mátrix (valósra is jó, ekkor léteznek U C m m és V C n n unitér mátrixok (valósban
Szinguláris érték felbontás Singular Value Decomposition Borbély Gábor 7. április... Tétel (teljes SVD. Legyen A C m n mátrix (valósra is jó, ekkor léteznek U C m m és V C n n unitér mátrixok (valósban
11. gyakorlat megoldásai
 11. gyakorlat megoldásai Lokális szélsőértékek F1. Határozzuk meg az alábbi kétváltozós függvények lokális szélsőértékeit! (a) f(x, y) = 4x 2 + 2xy + 5y 2 + 2, (b) f(x, y) = y 4 y + x 2 y + 2xy, (c) f(x,
11. gyakorlat megoldásai Lokális szélsőértékek F1. Határozzuk meg az alábbi kétváltozós függvények lokális szélsőértékeit! (a) f(x, y) = 4x 2 + 2xy + 5y 2 + 2, (b) f(x, y) = y 4 y + x 2 y + 2xy, (c) f(x,
Idő-frekvencia transzformációk waveletek
 Idő-frekvencia transzformációk waveletek Pokol Gergő BME NTI Üzemi mérések és diagnosztika 2014. május 8. Vázlat Alapfogalmak az idő-frekvencia síkon Rövid idejű Fourier-transzformáció spektrogram Folytonos
Idő-frekvencia transzformációk waveletek Pokol Gergő BME NTI Üzemi mérések és diagnosztika 2014. május 8. Vázlat Alapfogalmak az idő-frekvencia síkon Rövid idejű Fourier-transzformáció spektrogram Folytonos
PONTFELHŐ REGISZTRÁCIÓ
 PONTFELHŐ REGISZTRÁCIÓ ITERATIVE CLOSEST POINT Cserteg Tamás, URLGNI, 2018.11.22. TARTALOM Röviden Alakzatrekonstrukció áttekintés ICP algoritmusok Projektfeladat Demó FORRÁSOK Cikkek Efficient Variants
PONTFELHŐ REGISZTRÁCIÓ ITERATIVE CLOSEST POINT Cserteg Tamás, URLGNI, 2018.11.22. TARTALOM Röviden Alakzatrekonstrukció áttekintés ICP algoritmusok Projektfeladat Demó FORRÁSOK Cikkek Efficient Variants
A főtengelyproblémához
 1 A főtengelyproblémához Korábbi, az ellipszis perspektivikus ábrázolásával foglalkozó dolgozatainkban előkerült a másodrendű görbék kanonikus alakra hozása, majd ebben a főtengelyrendszert előállító elforgatási
1 A főtengelyproblémához Korábbi, az ellipszis perspektivikus ábrázolásával foglalkozó dolgozatainkban előkerült a másodrendű görbék kanonikus alakra hozása, majd ebben a főtengelyrendszert előállító elforgatási
A maximum likelihood becslésről
 A maximum likelihood becslésről Definíció Parametrikus becsléssel foglalkozunk. Adott egy modell, mellyel elképzeléseink szerint jól leírható a meghatározni kívánt rendszer. (A modell típusának és rendszámának
A maximum likelihood becslésről Definíció Parametrikus becsléssel foglalkozunk. Adott egy modell, mellyel elképzeléseink szerint jól leírható a meghatározni kívánt rendszer. (A modell típusának és rendszámának
Exponenciális, logaritmikus függvények
 Exponenciális, logaritmikus függvények DEFINÍCIÓ: (Összetett függvény) Ha az értékkészlet elemeihez, mint értelmezési tartományhoz egy újabb egyértelmű hozzárendelést adunk meg, akkor összetett (közvetett)
Exponenciális, logaritmikus függvények DEFINÍCIÓ: (Összetett függvény) Ha az értékkészlet elemeihez, mint értelmezési tartományhoz egy újabb egyértelmű hozzárendelést adunk meg, akkor összetett (közvetett)
STATISZTIKA. A maradék független a kezelés és blokk hatástól. Maradékok leíró statisztikája. 4. A modell érvényességének ellenőrzése
 4. A modell érvényességének ellenőrzése STATISZTIKA 4. Előadás Variancia-analízis Lineáris modellek 1. Függetlenség 2. Normális eloszlás 3. Azonos varianciák A maradék független a kezelés és blokk hatástól
4. A modell érvényességének ellenőrzése STATISZTIKA 4. Előadás Variancia-analízis Lineáris modellek 1. Függetlenség 2. Normális eloszlás 3. Azonos varianciák A maradék független a kezelés és blokk hatástól
Principal Component Analysis
 Principal Component Analysis Principal Component Analysis Principal Component Analysis Definíció Ortogonális transzformáció, amely az adatokat egy új koordinátarendszerbe transzformálja úgy, hogy a koordináták
Principal Component Analysis Principal Component Analysis Principal Component Analysis Definíció Ortogonális transzformáció, amely az adatokat egy új koordinátarendszerbe transzformálja úgy, hogy a koordináták
Erdősné Németh Ágnes. Batthyány Lajos Gimnázium Nagykanizsa. agi@microprof.hu. INFO SAVARIA 2010. április 23. Erdősné Németh Ágnes, Nagykanizsa 1
 Parkettázás s szabályos sokszögekkel Erdősné Németh Ágnes Batthyány Lajos Gimnázium Nagykanizsa agi@microprof.hu INFO SAVARIA 2010. április 23. Erdősné Németh Ágnes, Nagykanizsa 1 LOGO versenyfeladatok
Parkettázás s szabályos sokszögekkel Erdősné Németh Ágnes Batthyány Lajos Gimnázium Nagykanizsa agi@microprof.hu INFO SAVARIA 2010. április 23. Erdősné Németh Ágnes, Nagykanizsa 1 LOGO versenyfeladatok
Robotika. Kinematika. Magyar Attila
 Robotika Kinematika Magyar Attila amagyar@almos.vein.hu Miről lesz szó? Bevezetés Merev test pozíciója és orientációja Rotáció Euler szögek Homogén transzformációk Direkt kinematika Nyílt kinematikai lánc
Robotika Kinematika Magyar Attila amagyar@almos.vein.hu Miről lesz szó? Bevezetés Merev test pozíciója és orientációja Rotáció Euler szögek Homogén transzformációk Direkt kinematika Nyílt kinematikai lánc
GONDOLKODÁS ÉS NYELV
 GONDOLKODÁS ÉS NYELV GONDOLKODÁS A. Propozicionális B. Képzeleti Propozicionális gondolkodás Propozíció kijelentés, amely egy tényállásra vonatkozik, meghatározott viszonyban összekombinált fogalmakból
GONDOLKODÁS ÉS NYELV GONDOLKODÁS A. Propozicionális B. Képzeleti Propozicionális gondolkodás Propozíció kijelentés, amely egy tényállásra vonatkozik, meghatározott viszonyban összekombinált fogalmakból
Lineáris leképezések (előadásvázlat, szeptember 28.) Maróti Miklós, Kátai-Urbán Kamilla
 Maróti Miklós, Kátai-Urbán Kamilla") Lineáris leképezések (előadásvázlat, 2012. szeptember 28.) Maróti Miklós, Kátai-Urbán Kamilla Ennek az előadásnak a megértéséhez a következő fogalmakat kell tudni: homogén lineáris egyenletrendszer és
Lineáris leképezések (előadásvázlat, 2012. szeptember 28.) Maróti Miklós, Kátai-Urbán Kamilla Ennek az előadásnak a megértéséhez a következő fogalmakat kell tudni: homogén lineáris egyenletrendszer és
Hraskó András, Surányi László: spec.mat szakkör Tartotta: Hraskó András. 1. alkalom
 1. alkalom 1. Beszínezzük a koordináta-rendszer rácspontjait. Egyetlen szabályt kell betartanunk: az (a;b) pontnak ugyanolyan színűnek kell lennie, mint az (a-b;a) és az (a;b-a) pontnak (a és b egész számok).
1. alkalom 1. Beszínezzük a koordináta-rendszer rácspontjait. Egyetlen szabályt kell betartanunk: az (a;b) pontnak ugyanolyan színűnek kell lennie, mint az (a-b;a) és az (a;b-a) pontnak (a és b egész számok).
Képregisztrációs eljárások. Orvosi képdiagnosztika 13. ea ősz
 Képregisztrációs eljárások Orvosi képdiagnosztika 3. ea. 05 ősz Két kép egymáshoz igazítása, illesztése Példák: Időbeli követés Regisztráció célja Eltérő modalitások (PET-CT, Röntgen-MRI, UH-MRI,...) fúzió
Képregisztrációs eljárások Orvosi képdiagnosztika 3. ea. 05 ősz Két kép egymáshoz igazítása, illesztése Példák: Időbeli követés Regisztráció célja Eltérő modalitások (PET-CT, Röntgen-MRI, UH-MRI,...) fúzió
Véletlenszám generátorok és tesztelésük. Tossenberger Tamás
 Véletlenszám generátorok és tesztelésük Tossenberger Tamás Érdekességek Pénzérme feldobó gép: $0,25-os érme 1/6000 valószínűséggel esik az élére 51% eséllyel érkezik a felfelé mutató oldalára Pörgetésnél
Véletlenszám generátorok és tesztelésük Tossenberger Tamás Érdekességek Pénzérme feldobó gép: $0,25-os érme 1/6000 valószínűséggel esik az élére 51% eséllyel érkezik a felfelé mutató oldalára Pörgetésnél
KONVOLÚCIÓS NEURONHÁLÓK. A tananyag az EFOP pályázat támogatásával készült.
 KONVOLÚCIÓS NEURONHÁLÓK A tananyag az EFOP-3.5.1-16-2017-00004 pályázat támogatásával készült. 1. motiváció A klasszikus neuronháló struktúra a fully connected háló Két réteg között minden neuron kapcsolódik
KONVOLÚCIÓS NEURONHÁLÓK A tananyag az EFOP-3.5.1-16-2017-00004 pályázat támogatásával készült. 1. motiváció A klasszikus neuronháló struktúra a fully connected háló Két réteg között minden neuron kapcsolódik
Koordináta-geometria. Fogalom. Jelölés. Tulajdonságok, definíciók
 Koordináta-geometria Fogalom Ezen a helyen találkozik össze a számtan és a mértan. Körök, egyenesek, háromszögek és más egyéb alakzatok, de nem szerkesztenünk kell, vagy méricskélni, hanem számolni, viszont
Koordináta-geometria Fogalom Ezen a helyen találkozik össze a számtan és a mértan. Körök, egyenesek, háromszögek és más egyéb alakzatok, de nem szerkesztenünk kell, vagy méricskélni, hanem számolni, viszont
Képregisztrációs eljárások. Orvosi képdiagnosztika 2016 ősz
 Képregisztrációs eljárások Orvosi képdiagnosztika 06 ősz Két kép egymáshoz igazítása, illesztése Példák: Időbeli követés Regisztráció célja Eltérő modalitások (PET-CT, Röntgen-MRI, UH-MRI,...) fúzió Műtét
Képregisztrációs eljárások Orvosi képdiagnosztika 06 ősz Két kép egymáshoz igazítása, illesztése Példák: Időbeli követés Regisztráció célja Eltérő modalitások (PET-CT, Röntgen-MRI, UH-MRI,...) fúzió Műtét
Wavelet transzformáció
 1 Wavelet transzformáció Más felbontás: Walsh, Haar, wavelet alapok! Eddig: amplitúdó vagy frekvencia leírás: Pl. egy rövid, Dirac-delta jellegű impulzus Fourier-transzformált: nagyon sok, kb. ugyanolyan
1 Wavelet transzformáció Más felbontás: Walsh, Haar, wavelet alapok! Eddig: amplitúdó vagy frekvencia leírás: Pl. egy rövid, Dirac-delta jellegű impulzus Fourier-transzformált: nagyon sok, kb. ugyanolyan
Searching in an Unsorted Database
 Searching in an Unsorted Database "Man - a being in search of meaning." Plato History of data base searching v1 2018.04.20. 2 History of data base searching v2 2018.04.20. 3 History of data base searching
Searching in an Unsorted Database "Man - a being in search of meaning." Plato History of data base searching v1 2018.04.20. 2 History of data base searching v2 2018.04.20. 3 History of data base searching
Totális Unimodularitás és LP dualitás. Tapolcai János
 Totális Unimodularitás és LP dualitás Tapolcai János tapolcai@tmit.bme.hu 1 Optimalizálási feladat kezelése NP-nehéz Hatékony megoldás vélhetően nem létezik Jó esetben hatékony algoritmussal közelíteni
Totális Unimodularitás és LP dualitás Tapolcai János tapolcai@tmit.bme.hu 1 Optimalizálási feladat kezelése NP-nehéz Hatékony megoldás vélhetően nem létezik Jó esetben hatékony algoritmussal közelíteni
Közösség detektálás gráfokban
 Közösség detektálás gráfokban Önszervező rendszerek Hegedűs István Célkitűzés: valamilyen objektumok halmaza felett minták, csoportok detektálása csakis az egyedek közötti kapcsolatok struktúrájának a
Közösség detektálás gráfokban Önszervező rendszerek Hegedűs István Célkitűzés: valamilyen objektumok halmaza felett minták, csoportok detektálása csakis az egyedek közötti kapcsolatok struktúrájának a
Regresszió. Csorba János. Nagyméretű adathalmazok kezelése március 31.
 Regresszió Csorba János Nagyméretű adathalmazok kezelése 2010. március 31. A feladat X magyarázó attribútumok halmaza Y magyarázandó attribútumok) Kérdés: f : X -> Y a kapcsolat pár tanítópontban ismert
Regresszió Csorba János Nagyméretű adathalmazok kezelése 2010. március 31. A feladat X magyarázó attribútumok halmaza Y magyarázandó attribútumok) Kérdés: f : X -> Y a kapcsolat pár tanítópontban ismert
A valós számok halmaza
 VA 1 A valós számok halmaza VA 2 A valós számok halmazának axiómarendszere és alapvető tulajdonságai Definíció Az R halmazt a valós számok halmazának nevezzük, ha teljesíti a következő axiómarendszerben
VA 1 A valós számok halmaza VA 2 A valós számok halmazának axiómarendszere és alapvető tulajdonságai Definíció Az R halmazt a valós számok halmazának nevezzük, ha teljesíti a következő axiómarendszerben
Abszorpciós spektroszkópia
 Tartalomjegyzék Abszorpciós spektroszkópia (Nyitrai Miklós; 2011 február 1.) Dolgozat: május 3. 18:00-20:00. Egész éves anyag. Korábbi dolgozatok nem számítanak bele. Felmentés 80% felett. A fény; Elektromágneses
Tartalomjegyzék Abszorpciós spektroszkópia (Nyitrai Miklós; 2011 február 1.) Dolgozat: május 3. 18:00-20:00. Egész éves anyag. Korábbi dolgozatok nem számítanak bele. Felmentés 80% felett. A fény; Elektromágneses
A SÚLYOS ERŐMŰVI BALESETEK KÖRNYEZETI KIBOCSÁTÁSÁNAK BECSLÉSE VALÓSIDEJŰ MÉRÉSEK ALAPJÁN
 Nívódíj pályázat - a pályamű a SOMOS Alapítvány támogatásával készült A SÚLYOS ERŐMŰVI BALESETEK KÖRNYEZETI KIBOCSÁTÁSÁNAK BECSLÉSE VALÓSIDEJŰ MÉRÉSEK ALAPJÁN Deme Sándor 1, C. Szabó István 2, Pázmándi
Nívódíj pályázat - a pályamű a SOMOS Alapítvány támogatásával készült A SÚLYOS ERŐMŰVI BALESETEK KÖRNYEZETI KIBOCSÁTÁSÁNAK BECSLÉSE VALÓSIDEJŰ MÉRÉSEK ALAPJÁN Deme Sándor 1, C. Szabó István 2, Pázmándi