Nyugat-magyarországi Egyetem Budapesti Műszaki és Gazdaságtudományi Egyetem
|
|
|
- Aurél Szalai
- 8 évvel ezelőtt
- Látták:
Átírás
1 Nyugat-magyarországi Egyetem Budapesti Műszaki és Gazdaságtudományi Egyetem Halas János, Huba Antal, Láng Péter, Molnár László, Nagy Sándor, Samu Krisztián, Suda Jenő Miklós Elektronika Műszaki metaadatbázis alapú fenntartható e-learning és tudástár létrehozása TÁMOP A/1-11/

2 GSPublisherEngine tudasfelho.hu A pályázat keretein belül létrehoztunk egy speciális, felhő alapú adatbázist, tudásfelhő néven, ami egymástól függetlenül is értelmes tudásmorzsákból építkezik. Ezekből az elemi építőkövekből lehet felépíteni egy-egy órai tananyagot, vagy akár egy tantárgy teljes jegyzetét. A létrejött tananyagokat a program online fordítja le egy adott eszközre, így a tananyagok optimálisan tudnak megjelenni a diákok okostelefonján, vagy akár egy nagy előadó kivetítőjén is. A projektben résztvevő oktatók a saját maguk által fejlesztett, létrehozott tananyagokat feltöltötték a felhő alapú adatbázisba. A felhasznált anyagok minden eleme mindig magával viszi az eredetileg megadott metaadatokat (pl. fénykép készítője), így a felhasználás során a hivatkozás automatikussá válik. Ma nagyon sok oktatási kísérlet zajlik a világban, de még nem látszik pontosan, hogy a fordított osztály (flipped classroom) vagy a MOOC (massive open online courses) nyílt videó anyagai jelentik a járható utat. Az azonban mindenki számára világos, hogy változtatni kell a megszokott módszereken. A kidolgozott tudásfelhő keretrendszer egyszerre képes kezelni az egyéni tanulási utakat, de akár ki tud szolgálni több ezer hallgatót is egyszerre. GSPublisherEngine Minden oktató a saját belátása szerint tudja alkalmazni, használni, alakítani az adatbázisát, valamint szabadon használhatja a mások által feltöltött tanagyag elemeket anélkül, hogy a hivatkozásra külön hangsúlyt kellene fektetnie. Az egyes elemekből összeállított jegyzetek akár személyre szabhatók, ha pontosan behatárolható a célcsoport tudásszintje. Az elkészült tananyagok nem statikus, nyomtatott (PDF) jegyzetek, hanem egy állandóan változó, változtatható képekből, videókból és 3D modellekből felépített dinamikus rendszer. Az oktatók az ipar által megkövetelt legmodernebb technológiákat naprakészen tudják beépíteni a tudásfelhőben tárolt dinamikus jegyzeteikbe anélkül, hogy új PDF jegyzetet kellene kiadni. Ez az online rendszer biztosítja a tananyagoknak és magának az oktatásnak a fenntarthatóságát is. A dinamikus, metaadat struktúrára épülő tananyagainknak ebben a jegyzetben, csak egy pillanatfelvétele, lenyomata tud megjelenni. A videóknak, az interaktív és 3D struktúráknak, valamint a frissülő tartalmaknak a megjelenítésére így nincsen lehetőségünk. Az e-learning nem feleslegessé teszi a tanárokat, hanem lehetővé teszi számukra, hogy úgy foglalkozhassanak a diákjaikkal, ahogy a mai, felgyorsult világ megköveteli.

3 Aktuátortechnika
4 A tárgy tartalma Egyenáramú szervomotorok Elektronikusan kommutált motorok Aszinkron szervomotorok Léptetőmotorok Lineáris motorok Piezo-elektromos aktuátorok Magnetostrikciós aktuátorok Emlékező fémes (SMA) aktuátorok Elektrosztatikus aktuátorok Vezérelhető folyadékok
 aktuátorok Elektrosztatikus aktuátorok Vezérelhető")
5 EGYENÁRAMÚ SZERVOMOTOROK
6 Egyenáramú szervomotorok A műszertechnikában legelterjedtebb motorok Kedvező tulajdonságaik: analóg mozgás jó szabályozhatóság Alapvetően két típusuk terjedt el: Elektromágneses kölcsönhatáson alapuló Elektrodinamikus kölcsönhatáson alapuló motorok

7 Egyenáramú szervomotorok Elektromágneses kölcsönhatáson alapuló motorok

8 Egyenáramú szervomotorok Elektrodinamikus kölcsönhatáson alapuló egyenáramú motorok Lorentz-erő: df = I( dl B) F = IlB Lenz-törvény: U i = vlb
 F = IlB")
9 Egyenáramú szervomotorok Elektrodinamikus aktuátorok Ferromágneses forgórészű motorok Légréstekercses motorok

10 Egyenáramú szervomotorok Elektrodinamikus aktuátorok Nyugalmi állapotban az indítónyomaték hat a motor forgórészére A forgórész forgásba jön, így a forgórész tekercsében indukált feszültség: Az indukált feszültség hatására a vezettékben folyó áramerősség lecsökken: I k r I l B N r F M M = = = ω ω = = M i k r l B N U R k U R U U I M i ω = =

11 Egyenáramú szervomotorok Kommutáció Mindig tartalmaznak kefét és kommutátort (egyenirányítót)

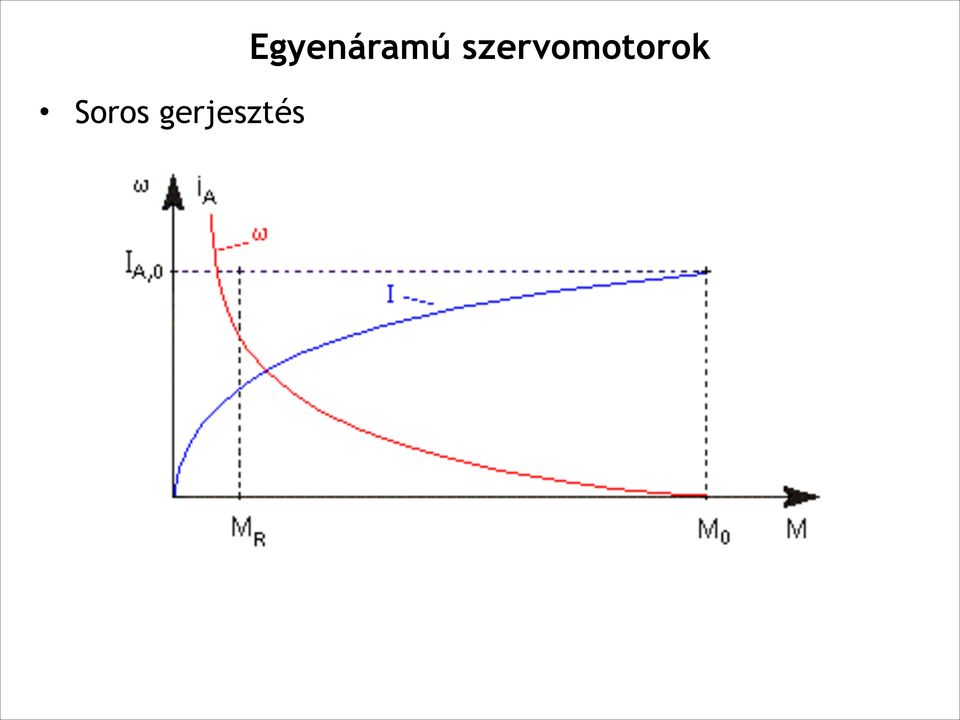
12 Egyenáramú szervomotorok Soros gerjesztés Ia=Ig M Uk Ia Ui Uk Ra Ig La Rg Lg Kvázi-stanicioner állapotot (ω=konst.; di/dt=0) feltételezve: U i a Φ = = i( R = C a 2 i i g g + = i = R g C 2 i ) + U i
 feltételezve: U i a Φ = = i( R = C a 2")
13 Soros gerjesztés Indukált feszültség A motor nyomatéka Egyenáramú szervomotorok U i = C 1 Φω = C 1 C 2 iω M = C = a Φ 2 1 i C1C 2i A fentiekből a motor karakterisztikus egyenlete: ω = U Ra + C 1 2M 1C2 C C R g

14 Egyenáramú szervomotorok Soros gerjesztés A motor (mechanikai) rövidzárási árama (ω=0) és nyomatéka: végeredményben: ( ) g a g a R R C C U i C C i C M R R U i + = = Φ = + = C C M i M M C C U = " # $ $ % & ω =

15 Soros gerjesztés Egyenáramú szervomotorok
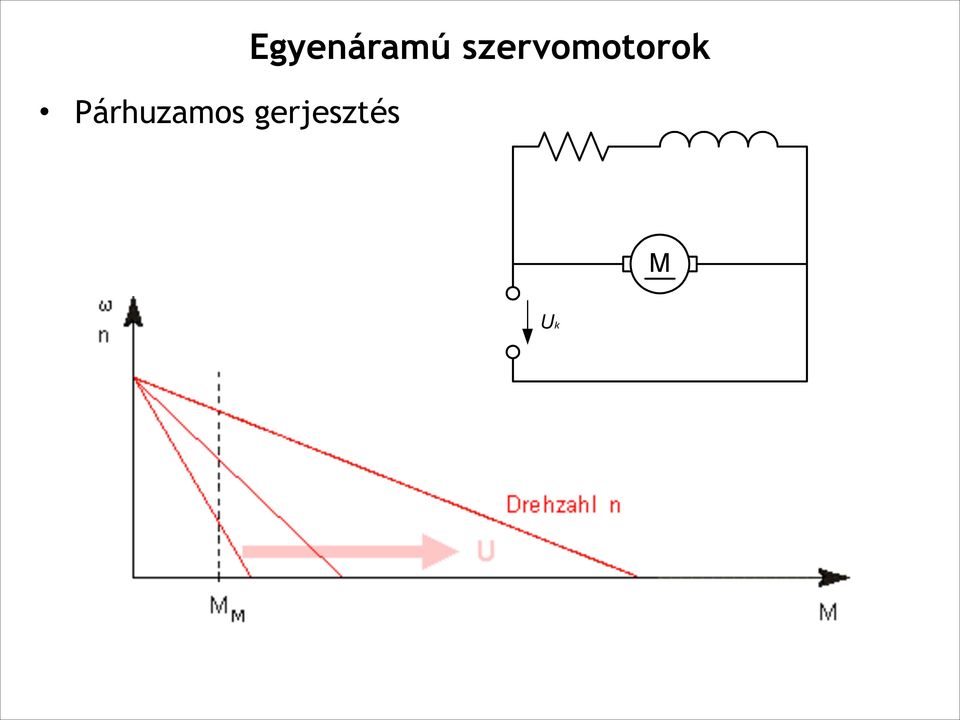
16 Párhuzamos gerjesztés Egyenáramú szervomotorok M Uk
17 Egyenáramú szervomotorok Külső gerjesztés Ug Ig=áll. D É Uk M Uk M Ra La 0 ΔUkefe A gerjesztés állandó Uk Ui Fordulatszám-tartó Gerjesztésként állandómágnes is alkalmazható, emiatt nagyobb a hatásfok

18 Külső gerjesztés Motoregyenletek Egyenáramú szervomotorok M = C 1 Φi = k M i U = C ω = k ω 1 Φ M i U = R i + ΔU + U R i + a kefe i a U i ω = U k M MR k a 2 M

19 Egyenáramú szervomotorok Külső gerjesztés Indítási áram Indítónyomaték Üresjárási fordulatszám i = 0 M = 0 U R a kmu R a ω 0 = U k M

20 Külső gerjesztés Egyenáramú szervomotorok ω & M # & M + = $ T M ω = $ 0 1 ω0 1 % M 0 " % M 0 S # "

21 Egyenáramú szervomotorok Külső gerjesztés Teljesítmény maximuma Hatásfok maximuma 2 ) ( max M P M M M M P M M M M P = = = = = ω ω ω ω ω 0 0 max ) ( M M M M M M S S S = η
22 Külső gerjesztés Egyenáramú szervomotorok
23 Egyenáramú szervomotorok Fordulatszám-szabályozás lehetőségei Kapocsfeszültség változtatása
24 Egyenáramú szervomotorok Fordulatszám-szabályozás lehetőségei Előtétellenállás alkalmazása
25 Egyenáramú szervomotorok Fordulatszám-szabályozás lehetőségei Gerjesztés változtatása
26 Univerzális motor A párhuzamos és soros gerjesztésű egyenáramú motorok forgásiránya a kapocsfeszültség irányától független, mert az armatúraáram és a fluxus együtt váltanak előjelet. Hogyan viselkednek ezek a motorok váltóáram esetében? A nyomaték a fentiekkel: A hasznos nyomaték-komponens i g i a = 2I cos( ωt) a = 2I cos( ωt Ψ) g ( ωt) I cos( ωt Ψ) = C C I I [ cos( Ψ) + cos( 2ω Ψ) ] M ( t) = 2C1C 2I a cos g 1 2 g a t M = C C I I g cos 1 2 a ( Ψ)
27 Univerzális motor Párhuzamos gerjesztésű motor esetében nagy a gerjesztőköri induktivitás, a gerjesztőáram közel 90 -kal késik az armatúraáramhoz képest, cosψ 0, így a nyomaték is megközelítőleg nulla. Soros motornál a gerjesztőáram megegyezik az armatúraárammal, így ψ 0, cosψ 1 A motor nyomatéka közel ugyanakkora, mint egyenáramú táplálás esetében. A lemezelt állórészvasmaggal készített kisteljesítményű kétpólusú, egyen- és váltakozó árammal egyaránt működő motorok az ún. univerzális motorok. Jelleggörbéjük a soros gerjesztésű motorokéhoz hasonló, nagy az indítónyomatékuk, sokféle fordulatszámra készíthetők. Jellemző felhasználási területek: kéziszerszámok, háztartási eszközök.
28 ELEKTRONIKUSAN KOMMUTÁLT MOTOROK
29 Elektronikusan kommutált motorok Az egyenáramú motoroknak a mechanikus kommutáció miatt a következő hátrányai vannak: Érintkezési bizonytalanság Korlátozott élettartam Helyigény Járulékos zajok Súrlódási veszteségek A kommutátor mechanikai szilárdsága korlátozott A mechanikus kommutáló berendezést elektronikusra cserélve megtarthatóak az egyenáramú gépek kedvező tulajdonságai, a fenti hátrányokat megszüntetve.
30 Elektronikusan kommutált motorok Az elektronikus kommutátorú motorban az állórész és a forgórész szerepe felcserélődik. A forgórész szöghelyzetét ismerni kell. Ehhez különféle vezérléseket alkalmaznak: Hall generátoros, Optoelektronikai, Csatolótranszformátoros, Indukált feszültséges vezérléseket.
31 Elektronikusan kommutált motorok Az állórész tekercselése Egyfázisú, kétütemű motorok Jó tekercskihasználás Egyszerű tekercselés Ikertápegység A fordulatszámmal arányos jel előállítása nehezebb
32 Elektronikusan kommutált motorok Az állórész tekercselése Egyfázisú, kétütemű motor, bifiláris tekercseléssel Hátrányai Nő a tekercselés költsége Rosszabb a tekercskihasználás Az egyfázisú tekercselés előnye: Egyszerű kapcsoló elektronika Az egyfázisú tekercselés hátránya: Nulla nyomatékú helyek vannak (ezt egyirányú forgás esetén légrésaszimmetriával lehet kiküszöbölni
33 Elektronikusan kommutált motorok Háromfázisú, háromütemű motorok
34 Elektronikusan kommutált motorok Négyfázisú, négyütemű motorok
35 Elektronikusan kommutált motorok Háromfázisú, hatütemű motorok A tekercselés klasszikus háromfázisú tekercselés, amelyet híd táplál Előnyök: A nyomatéklüktetés minimális A kihasználás a legkedvezőbb Háránya: Az indukált feszültséggel nem lehet a vezérlést megvalósítani A vezérlés bonyolultabb
36 Elektronikusan kommutált motorok A kapcsolóelemek vezérlése A vezérlés jósága erősen befolyásolja a motor nyomatékát, kihasználtságát. Az érzékelőkkel, kapcsolásokkal szemben támasztott követelmények: Ne tartalmazzon mozgó, csúszó érintkezőt. Minimális helyzetérzékelési bizonytalanság. Érzéketlenség a tápfeszültség- és a hőmérsékletváltozásra. Minimális időállandó. Az érzékelés irányhelyes legyen.
37 Elektronikusan kommutált motorok A forgórész helyzetének érzékelésére a következő elvek alkalmasak: Nagyfrekvenciás csatolású (induktív, kapacitív) Optoelektronikus (IR, látható) Magnetorezisztív Reed-relés Ferrorezonanciás Hall generátoros Érzékelő elem nélkül, használaton kívüli tekercsekben indukált feszültséggel működő vezérlések.
38 Elektronikusan kommutált motorok Vezérlés csatolótranszformátorról
39 Elektronikusan kommutált motorok Vezérlés indukált feszültséggel A kapcsolótranszformátorokat az éppen nem gerjesztett tekercsekben indukált feszültséggel vezéreljük. Csak akkor van indukált feszültség, amikor a motor már forog, ezért a vezérlés is csak forgó motor esetében működik. Indításkor a vezérlőáramkör többfokozatú multivibrátorként működik, a motor léptetőmotorként indul. Előnye, hogy hiányzik a forgórész helyzetének meghatározására szolgáló alkatrész. A vezérlés fázistolást is végez az egyes tekercsek átfedéssel történő vezérléséhez. A motor jó kihasználása és stabil üzeme akkor teljesül, ha az egyes tekercsek kikapcsolt állapotaiban a fázistoló kapcsolás a tekercsen mérhető indukált feszültséghez képest 60 -os késleltetéssel tolja el a nullátmenetet, azaz a következő fázis bekapcsolásának pillanatát. Ez a fázistoló csak meghatározott fordulatszámra méretezhető, és a motor ebben a szűk tartományban üzemeltethető.
40 Elektronikusan kommutált motorok Hall-generátoros vezérlés
41 Elektronikusan kommutált motorok Fordulatszám-szabályozás
42 ASZINKRON MOTOROK
43 Aszinkron motorok Az aszinkron motor az egyik leggyakrabban előforduló motortípus. Ennek oka, hogy a kalickás forgórészű motorok a legegyszerűbb felépítésűek, és így a legolcsóbbak. Mint ismeretes, aszinkron gépek esetében nyomatékot forgó mágneses mezővel lehet létrehozni. Egyfázisú táplálás estében azonban lüktetőnyomaték alakul ki, ezért csak külön elemek közbeiktatásával lehetséges egyfázisú motorokat létrehozni. Egyfázisú motorok lehetnek: Segédfázis nélküli, Segédfázisos, Kondenzátoros, Árnyékolt pólusú motorok.
44 Aszinkron motorok A motorra jellemző a kis indítónyomaték, emiatt számukra az indítás a legkényesebb üzemállapot.
45 Aszinkron motorok Segédfázis nélküli, egyfázisú aszinkron motor Szimmetrikus táplálású forgó kétfázisú motor egyik fázisát megszakítva, a motor egyfázisú táplálás esetén is forgásban marad és terhelhető.
46 Aszinkron motorok Segédfázisos aszinkron motor Olyan egyfázisú aszinkron motor, amelynek főfázis-tekercseléséhez képest térben eltolt helyzetű, párhuzamosan kapcsolt tekercselése van, és ebben a főfázis gerjesztéséhez képest időben (fázisban) különböző gerjesztést létesítenek.
47 Aszinkron motorok Indítóellenállásos segédfázis A főfázis általában az állórészhornyok 2/3-át foglalja el. Kedvezőbbek az indítási tulajdonságok, ha szinuszos koncentrikus a tekercselés. A segédfázis rezisztanciájának megnövelésével biztosítható, hogy az azonos fázisú táplálás ellenére a fázisáramok különböző fázisúak legyenek. A főfázis rövidzárási áramához képest ugyanis nagy, körüli értékű, míg a segédfázisé, az ellenállás hatására lecsökken.
48 Aszinkron motorok Indítókondenzátoros segédfázis Az indítókondenzátoros motoroknak jó indítási tulajdonságaik vannak (ha M i >1,6M n, indítókondenzátort alkalmaznak), ezen felül gazdaságosak is. Az indítókondenzátor több típusa bipoláris elektrolitkondenzátor, amelyeknek az alábbi korlátozásai vannak: Veszteségük nagy, ha a lekapcsolás késik, felrobbanhatnak. Egy indítás kb. 3s-ra, az óránkénti indítások száma re van korlátozva. A kondenzátor hőmérsékletének emelkedésével többnyire a kapacitás is nő. A sorozatban gyártott kapacitások tűrése kb. ±10%.
49 Aszinkron motorok Üzemi kondenzátoros motorok Jó üzemi és elfogadható indítási tulajdonságok. Megfelelő paraméterekkel bármilyen üzemi viszonyokat ki tudnak elégíteni. Üzemi kondenzátorral a gép hatásfokát és leadott teljesítményét (azonos aktív térfogat mellett) jelentősen növelni lehet. A hatásfok elérheti a körforgó mezős gép %-át is, a kapcsolástól függően. Legjobban elterjedt kapcsolás kondenzátoros/főfázis tekercstérfogatának aránya 0,5..1,2 között változik. A segédfázis tekercstérfogatának csökkenésével csökken a motor aktív anyagainak kihasználtsága, azonban ez célmotorok esetében háttérbe szorulhat. Az üzemi kondenzátor kapacitás a legkedvezőbb üzemi tulajdonságok esetén lényegesen kisebb az indításra használt kondenzátorokénál (kb %).
50 Aszinkron motorok Üzemi kondenzátoros motorok A kondenzátoros motorok néhány sajátossága: Üresjárási állapotuk kedvezőtlenebb lehet, mint a névleges terhelésnél. A kondenzátoros fázis indítási árama alatta, üresjárási árama felette van a névleges terheléshez tartozó áramnak. Induláskor és üresjáráskor mindig elliptikus mező van.
51 Aszinkron motorok Üzemi kondenzátoros motorok Kétfázisú párhuzamos kapcsolás Egyik leggyakoribb kapcsolás. A forgómező feltételei csak egy fordulatszámnál lehetséges, egyébként elliptikus.
52 Aszinkron motorok Üzemi kondenzátoros motorok Kétfázisú soros kapcsolás Akkor célszerű alkalmazni, ha a hornyonkénti vezetőszámot csökkenteni akarják Nem elterjedt kapcsolás.
53 Aszinkron motorok Üzemi kondenzátoros motorok Csillagkapcsolás Háromfázisú sztátortekercselés. Ekkor jobb a tekercselési tényező, kisebb a kondenzátorfeszültség, és kisebb a hornyonkénti vezetőszám.
54 Aszinkron motorok Üzemi kondenzátoros motorok Deltakapcsolás 500W-nál nagyobb teljesítmények esetén alkalmazzák. A csillag- és deltakapcsolások között nincs elvi különbség, az egyes fázistekercseket kell kisebb, ill. nagyobb feszültségűre készíteni. A kapcsolások hibája, hogy csak cosϕ=0,5 fázisszögnél jön létre a körforgó mező.
55 Aszinkron motorok Árnyékolt (hasított) pólusú motor 5 W-nál kisebb teljesítmények esetében széles körben elterjedt.
56 Aszinkron motorok Árnyékolt (hasított) pólusú motor Az árnyékolt pólusú gép indítónyomatéka függ az árnyékoló-menet rezisztanciájától és az árnyékolt pólusív nagyságától.
57 Aszinkron motorok Árnyékolt (hasított) pólusú motor Mivel az árnyékolt pólusú motorok kiálló pólusúak, a gerjesztés eloszlása a légrésben nem szinuszos. Ezért páratlan rendszámú felharmonikusok lépnek fel a jellegörbén.
58 Aszinkron motorok Aszinkron szervomotorok Legjelentősebb képviselői az úgynevezett serleges motorok, de lehetnek kalickás forgórészűek is. Gerjesztése állandó amplitúdójú szinuszos, vezérlése a gerjesztőfeszültséghez képest ±90 -kal eltolt fázisú, változó amplitúdójú feszültséggel lehetséges. A forgórészt olyan nagy ellenállásúra készítik, hogy a billenőnyomaték a negatív fordulatszámok tartományába,(s>2) essen. A nagy forgórész-ellenállás miatt a hatásfokuk rossz. A vezérlőfeszültség fázisa a forgásirányt, amplitúdója pedig a fordulatszámot határozza meg. Lényeges tulajdonsága a motornak, hogy álló helyzetben is van nyomatékuk, így külső terhelés hatására fékező hatást gyakorolnak
59 Aszinkron motorok Aszinkron szervomotorok A motortípus nyomaték fordulatszám jelleggörbéjén a folytonos görbék arra az esetre vonatkoznak, amikor a gerjesztőfeszültség értéke zérus. A vezérlőfeszültség megjelentével a görbék eltorzulnak, az ábrán szaggatott vonallal jelölt görbékre, és a motor a jelölt nyomatékkal és fordulattal forgásba jön.
60 Aszinkron szervomotorok Aszinkron motorok
61 LÉPTETŐMOTOROK
62 Léptetőmotorok Szakaszosan érkező jelekkel táplálva meghatározott nagyságú szögelfordulásokat amelyek nem folytonosak tesznek. Jellegzetesen az összes tekercselés a motor állórészén helyezkedik el és a rotor, konstrukciótól függően, állandó mágnes, vagy valamilyen mágnesesen lágy anyag. A mozgáshoz szükséges összes kommutációt a motor vezérlésének kell megoldania, ami nem szerves része a motornak. A motorokat és a vezérlő elektronikákat úgy tervezik, hogy képesek legyenek mindkét irányba forogni, illetve a motort képesek legyenek egy fix helyzetben tartani. A modern léptetőmotorok legtöbbje képes audio-frekvenciás tartományban lépni, ami meglehetősen gyors mozgatást tesz lehetővé. A léptetőmotoros hajtások alkalmasak a nyílt körű szabályozásokra, de sokszor, a sebesség növelése érdekében visszacsatolásos szabályozást alkalmaznak. Ezek a visszacsatolásos szabályozások általában mikroprocesszorral működnek. A mikroprocesszoros visszacsatolású léptetőmotorokat a szakirodalom gyakran elektronikus kommutátorú gépeknek tekinti.
63 Léptetőmotorok A változó reluktancia motorok
64 Léptetőmotorok A változó reluktancia motorok Forgórésze fogazott, mágnesesen lágy anyag. Az állórész és a forgórész fogszáma különböző, Az állórész gerjesztésekor a mágneses erővonalak energiaminimumra törekszenek, amit a mágneses ellenállás minimumánál érnek el, tehát a forgórész fogát a legközelebbi helyzetbe húzza. A minimumra való törekvéskor fellépő nyomatékot nevezik reluktancianyomatéknak, innen ered a típus elnevezése. Mivel a rotor nem állandó mágnes, a motornak nincs tartónyomatéka a tekercsek gerjesztetlen állapotában. A változó reluktancia motorok nyomaték, tehetetlenségi nyomaték aránya jó, viszont a méret és a nyomaték aránya rossz, ezért ritkán alkalmazzák ipari környezetben. A fogak számának növelése érdekében a forgórészt több fogazott elemből építik fel, amelyek egymáshoz képest el vannak forgatva, illetve az állórészen többfázisú tekercselést hoznak létre.
65 Léptetőmotorok Állandómágneses léptetőmotorok
66 Léptetőmotorok Állandómágneses léptetőmotorok Forgórésze radiálisan mágnesezett permanens mágnesből készül, állórésze pedig hasonló a változó reluktancia motoréhoz. Az állandómágnes miatt a tekercsek gerjesztetlen állapotában is van tartó nyomaték. A tekercsek gerjesztésekor a kialakult mágneskör energiaminimumra törekszik, amit a legrövidebb mágneses erővonalakkal ér el, ezért a tekercs a polaritásával ellentétes fogat vonzani fogja, létrehozva így a rotor elfordulását. Az állandómágneses léptetőmotorok előnye a változó reluktancia motorokhoz képest a nagyobb statikus nyomaték, hátránya viszont az alacsonyabb határfrekvencia (ennek oka az állandómágnes fluxusának csillapításában rejlik). További hátrány lehet, hogy a villamos gerjesztés az állandómágnes lemágneseződését okozza, így a lépések alatt a mágnesek munkapontja jelentősen változik.
67 Hibrid léptetőmotorok Léptetőmotorok
68 Léptetőmotorok Hibrid léptetőmotorok A hibrid léptetőmotorok a legelterjedtebb típusú léptetőmotorok. Elterjedésüket kedvező paramétereik indokolják. A hibrid motorok ötvözik a változó reluktancia és az állandómágneses motorok előnyeit. Az állórész is és a forgórész is fogazott (az állórész fogainak száma meg is egyezhet, de különbözhet is a forgórész fogainak számával), mint a változó reluktancia motornál, azzal a különbséggel, hogy a forgórész állandómágnest tartalmaz. Egyesíteni tudja a változó reluktancia motorok nagy működési sebességét és kis lépésszögét az állandómágneses motorok nagyobb nyomatékával.
69 Léptetőmotorok Unipoláris vezérlésű léptetőmotorok mindkét tekercsen középleágazással vannak huzalozva. A tekercsek középleágazásai jellemzően a pozitív tápfeszültségre vannak kötve, és a tekercsek kivezetései vannak felváltva földre kapcsolva. A motorok állórészén lévő tekercsek megosztottak az egymással szemben álló pólusok között (jelen esetben az 1-es tekercs meg van osztva az alsó és a felső, a 2-es tekercs pedig a jobb és a bal pólus között).
70 Léptetőmotorok Unipoláris vezérlésű léptetőmotorok Az unipoláris vezérlés előnye, hogy a vezérlő áramkörnek összesen két tranzisztort kell tartalmaznia fázisonként. Hátránya viszont, hogy a beépített rézmennyiségnek csak a fele vesz részt a mágneses tér létrehozásában, ezért a teljesítménye kissé csökken. A léptetés sebessége növelhető a T=L/R időállandó csökkentésével.
71 Léptetőmotorok Bipoláris vezérlésű léptetőmotorok Tekercselésük egyszerűbb, minden motorfázis csak egy tekercselést tartalmaz, nem található rajtuk középleágazás. Így a motor egyszerűbbé válik, viszont a motor vezérlőáram-köre lesz némileg bonyolultabb, mivel rá hárul a mágneses polaritások fordításának feladata.
72 Léptetőmotorok Bipoláris vezérlésű léptetőmotorok A bipoláris vezérlés létrehozásához motorfázisonként négy tranzisztorra van szükség, viszont a teljes beépített rézmennyiség részt vesz a mágneses tér felépítésében, ezért hatásfokuk nagyobb az unipoláris motorokénál.
73 Üzemmódok Léptetőmotorok
74 Léptetőmotorok Üzemmódok Hullámhajtás Egyszerre csak egy tekercs gerjesztett A vezérlési szekvencia: A B A B ennek hatására a rotor a pozíciókba lép. Hátránya a rossz tekercskihasználás (unipoláris motor esetében 25%, bipoláris motor esetében 50%), ezért kicsi a leadott teljesítmény
75 Üzemmódok Egészlépéses üzemmód Egyszerre kéttekercs gerjesztett A vezérlési szekvencia: AB AB Léptetőmotorok AB AB ennek hatására a rotor a pozíciókba lép. Az egészlépéses üzemmód ugyanazt a szögelfordulást hozza létre, mint a hullámhajtás, de közel kétszer akkora teljesítménnyel
76 Léptetőmotorok Üzemmódok Féllépéses üzemmód Az egészlépéses üzemmód és a hullámhajtás kombinációja. Az elérhető lépésszög a fenti két hajtással elérhetőnek a fele A vezérlési szekvencia: ennek hatására AB a B rotor AB a A AB B AB A pozíciókba lép. Az féllépéses üzemmódban a motor nyomatéka ingadozik
77 Léptetőmotorok Üzemmódok Mikrolépéses üzemmód A mikrolépéses üzemmódban a lépéseket még jobban aláosztjuk. Ez a vezérlő áram erősségének változtatásával érhető el
78 Statikus jellegörbe Léptetőmotorok
79 Dinamikus jellegörbe Léptetőmotorok
80 Szenzortechnika
81 A tárgy tartalma A hosszmérés, elmozdulásmérés szenzorai Potenciométeres átalakítók Nyúlásmérő bélyeges átalakítók Induktív átalakítók Optoelektronikus átalakítók Kapacitív átalakítók A sebesség- és gyorsulásmérés szenzorai Indukciós átalakítók Örvényáramos átalakítók Piezoelektromos átalakítók Induktív átalakítók Az erő-, nyomaték-, és nyomásmérés szenzorai Nyúlásmérő bélyeges átalakítók Piezoelektromos átalakítók Kapacitív átalakítók A hőmérséklet-, hőmennyiség-mérés szenzorai Bimetálok Ellenállás-hőmérők, termisztorok Hőmérsékletmérés diódával Termoelemek A fény (elektromágneses sugárzás), mágneses mező mérésének szenzorai Fotodiódák Fotóellenállások Fotótranzisztorok Fényelemek Magnetorezisztív elemek Hall elemek
82 A HOSSZMÉRÉS, ELMOZDULÁSMÉRÉS SZENZORAI
83 Potenciométeres átalakítók A potenciométer: két fix és egy mozgó kivezetéssel ellátott rezisztív feszültségosztó. R = cα ( = cs) c = R α max max & $ = % R s max max # " a = α α max R = ar max
84 Potenciométeres átalakítók Működési egyenletek, modellezés Rvez1 Rvez2 Ube R0 Rx Rt Uki Rvez1 Rvez2 Egyszerű terheléssel (elhanyagolva a vezetékellenállásokat) a karakterisztika: u ki = ( R 0 R R t x R ) + x R t R x u be
85 Potenciométeres átalakítók 1 Az átalakító karakterisztikájának változása a terhelő-ellenállás függvényében Rt/Ro=0,1 Rt/Ro=1 Rt/Ro=10 Rt/Ro=0,5 Rt/Ro=5 0,75 Uki/Ube[] 0,5 0, Rx[%]
86 Potenciométeres átalakítók Rétegpotenciométerek Karakterisztika lehet (az ellenállásréteg változó vastagságával érhető el) Lineáris, Exponenciális, Logaritmikus Speciális csoport a trimmer (beállító) potenciométer. Jellemző rá a rosszabb minőség, ezért érzékelőként nemigen használatos.
87 Potenciométeres átalakítók Huzalpotenciométer Nagyobb megbízhatóság Kisebb névleges ellenállás-tartomány A jelleggörbéjük azonban lépcsőzetes R R S = = ar 1 2n R ± 2n max a Menetszám növelése -> helikális potenciométer
88 Potenciométeres átalakítók Kialakítások forgó potenciométer
89 Potenciométeres átalakítók Kialakítások lineáris potenciométer
90 Potenciométeres átalakítók Kialakítások helikális potenciométer
91 Nyúlásmérő bélyeges átalakítók Rugalmas deformációt mérő ellenállás Anyaga: fémhuzal, vagy félvezető Hossz, keresztmetszet (tenzometrikus hatás), és a fajlagos ellenállás (piezorezisztív hatás) megváltozásán alapszik dr R dρ = ε g ρ ( 1+ 2ν) + = ε
92 Nyúlásmérő bélyeges átalakítók Feltétel: a huzal deformációja a rugalmassági határán belül legyen Rendszerint több szálat alkalmazunk, mert egy szál meredeksége kicsi és a mérés jel/zaj viszonya rossz (villamosan soros, deformáció szempontjából pedig párhuzamos kapcsolásúak)
93 Nyúlásmérő bélyeges átalakítók Fémhuzalos bélyegek: Tenzometrikus hatáson alapszik Névleges ellenállásuk 120, (300), 350, 600, vagy 1000Ω Gauge faktor: 2..2,2 Linearitás (függ a terheléstől): 4000 µε-ig kb. 0,1% µε-ig kb. 1% Mérhető legkisebb nyúlás: kb 0,1 µε Élettartamuk: Mérési hőmérséklettartomány: C
94 Nyúlásmérő bélyeges átalakítók Félvezető bélyegek: Piezorezisztív hatáson alapszik Hőmérsékletváltozásra érzékenyebbek. Névleges ellenállásuk 120Ω Gauge faktor: Linearitás (függ a terheléstől): 1000 µε-ig <1% 5000 µε felett jelentősen lecsökken Mérhető legkisebb nyúlás: kb 0,001 µε Élettartamuk: 10 6 ciklus (1000 µε mellett) Mérési hőmérséklettartomány: C
95 Jelleggörbéik: fémszálas lineáris félvezető nemlineáris Nyúlásmérő bélyeges átalakítók ΔR R Fémszálas n típusú félvezető p típusú félvezető ε
96 Nyúlásmérő bélyeges átalakítók Jellegzetes hibák: Kúszás; vagyis, hogy a bélyeg milyen mértékben fut együtt a mérőtesttel. Ismétlési, irányváltási hiba. Linearitási hiba. Nullpont hőmérsékletfüggése.
97 Nyúlásmérő bélyeges átalakítók Nyúlásmérő bélyeges elmozdulásmérés
98 Induktív átalakítók Egy vasmagos tekercs induktivitása függ a mágnesköri ellenállástól: L 2 N ds = R = m µ A R m Rm változtatható: Légrés nagyságának változtatásával Vasmagos tekercs induktivitásának változtatásával (merülővasmagos átalakítók) A relatív permeabilitás változtatásával (magnetoelasztikus átalakítók)
99 Induktív átalakítók Hátrányok: Relatíve nagy tömeg és méret Nehéz gyárthatóság Monolitikus integrált áramköri technológiába nem, hibrid áramkörbe is csak nehezen illeszthető. Hőmérsékletfüggés: Hődilatáció következtében változik a tekercs geometriája, ellenállása A geometria változása miatt változik a menetkapacitás is, ami a komplex veszteséggel és a jósági tényezővel is összefügg. A mérőkör váltakozó feszültségű, vivőfrekvenciás mérőhíd használható, fázisérzékeny demodulációval Linearitása függ az elmozdulás mértékétől. Kis elmozdulás: rosszabb felbontóképesség, jelmeredekség. Nagy elmozdulás: nagyobb szórt induktivitás miatt rosszabb linearitás.
100 Induktív átalakítók Légrés-változáson alapuló típusok Legfontosabb képviselői az induktív közelítéskapcsolók (proximity switch)
101 Induktív átalakítók Merülővasmagos típusok Legfontosabb képviselői a differenciátekercses lineáris induktív útadók
102 Induktív átalakítók Differenciátekercses induktív útadó félhidas kapcsolásban:
103 Induktív átalakítók Transzformátor típusúak: Elvileg az összes kéttekercses (differenciál) tekercstípusú átalakító felhasználható transzformátortípusú átalakítóként, mivel a köztük lévő különbség nem a felépítésükben, hanem a kapcsolástechnikájukban van. Leggyakrabban a differenciáltranszformátoros átalakítókat alkalmazzák, ahol a primer, vagy a szekunder tekercset, esetleg mindkettőt megosztják.
104 Induktív átalakítók Speciális rendeltetésű differenciál-transzformátoros mérőátalakítók:
105 Inductosyn Az inductosyn egy huzalozott pályából és csúszkából áll. A csúszka két, egymással negyed osztással eltolt tekercset tartalmaz. Pálya Csúszka U1 U2 Ube
106 Inductosyn A pálya (állórész) tekercselését néhány khz-es váltakozó feszültséggel gerjesztve a csúszka tekercseiben feszültség indukálódik, amely arányos a csúszka tekercsei és a pálya tekercse közötti kölcsönös induktivitással, végeredményben a csúszka elmozdulásával. u u 1 2 = = ku ku be be & 2πx sin( ωt)sin$ % p & 2πx sin( ωt)cos$ % p # " # "
107 Optoelektronikus átalakítók Transzmissziós elv Reflexiós elv x x Mindkét esetben LED-ből és fotótranzisztorból áll A LED-et, 20 ma árammal célszerű terhelni A kimenet a fototranzisztor kollektor-emitter feszültsége. Az érzékenység a kollektorköri munkaellenállással állítható. Érzékeny a porra, változó fényviszonyokra. Gyakori a modulált fényforrás
108 Optoelektronikus átalakítók Abszolút útadó Inkrementális útadó
109 Fotodiódás átalakítók Iker-fotodióda Egy anyagból készül, ezért jó a termikus együttfutásuk I If II x n p n x I II
110 Fotodiódás átalakítók Kvadráns fotodióda Leggyakoribb alkalmazási területe a CD fej szabályozása y II I I = ( I + I ) ( I + I x I IV II III ) x III IV I y = ( I I + I II ) ( I III + I IV )
111 Kapacitív átalakítók Elmozdulásmérésre a hagyományos, fémfegyverzetekből felépült kondenzátorok alkalmasak. A fegyverzetek közelítése, távolítása, illetve a fegyverzetek közti anyag dielektromos állandójának megváltozása a kondenzátor kapacitását növeli, illetve csökkenti. ε ε A C = 0 r l
112 A SEBESSÉGMÉRÉS SZENZORAI
113 Indukciós átalakítók Aktív átalakítók, feszültséget hoznak létre, szemben passzív átalakítókkal, amelyek a tápfeszültséget csak modulálják. Az indukciós átalakítók legnagyobb része a mozgási indukción alapszik. A mozgási indukció: B indukcióval jellemzett mágneses térben v sebességgel haladó Q töltésre F erő hat, akkor is, ha B konstans. F = QBvsinα F Q = Bvsinα = E U B B = Eds = A A Bvsinαds
Érzékelők és beavatkozók
 Érzékelők és beavatkozók DC motorok 1. rész egyetemi docens - 1 - Főbb típusok: Elektromos motorok Egyenáramú motor DC motor. Kefenélküli egyenáramú motor BLDC motor. Indukciós motor AC motor aszinkron
Érzékelők és beavatkozók DC motorok 1. rész egyetemi docens - 1 - Főbb típusok: Elektromos motorok Egyenáramú motor DC motor. Kefenélküli egyenáramú motor BLDC motor. Indukciós motor AC motor aszinkron
Alapfogalmak, osztályozás
 VILLAMOS GÉPEK Alapfogalmak, osztályozás Gépek: szerkezetek, amelyek energia felhasználása árán munkát végeznek, vagy a felhasznált energiát átalakítják más jellegű energiává Működési elv: indukált áram
VILLAMOS GÉPEK Alapfogalmak, osztályozás Gépek: szerkezetek, amelyek energia felhasználása árán munkát végeznek, vagy a felhasznált energiát átalakítják más jellegű energiává Működési elv: indukált áram
Budapest Műszaki Főiskola Bánki Donát Gépész és Biztonságtechnikai Kar Mechatronikai és Autotechnikai Intézet. Elektrotechnika
 Budapest Műszaki Főiskola Bánki Donát Gépész és Biztonságtechnikai Kar Mechatronikai és Autotechnikai Intézet Elektrotechnika Különleges motorok Összeállította: Lukács Attila PhD hallgató (BME MOGI) és
Budapest Műszaki Főiskola Bánki Donát Gépész és Biztonságtechnikai Kar Mechatronikai és Autotechnikai Intézet Elektrotechnika Különleges motorok Összeállította: Lukács Attila PhD hallgató (BME MOGI) és
Érzékelők és működtetők II.
 Érzékelők és működtetők II. Előadásvázlat 1. Az érzékelőknél alkalmazott legfontosabb illesztő áramkörök. Egyenáramú szervomotorok 3. Elektronikusan kommutált motorok 4. Aszinkron szervomotorok 5. Léptetőmotorok
Érzékelők és működtetők II. Előadásvázlat 1. Az érzékelőknél alkalmazott legfontosabb illesztő áramkörök. Egyenáramú szervomotorok 3. Elektronikusan kommutált motorok 4. Aszinkron szervomotorok 5. Léptetőmotorok
Minden mérésre vonatkozó minimumkérdések
 Minden mérésre vonatkozó minimumkérdések 1) Definiálja a rendszeres hibát 2) Definiálja a véletlen hibát 3) Definiálja az abszolút hibát 4) Definiálja a relatív hibát 5) Hogyan lehet az abszolút-, és a
Minden mérésre vonatkozó minimumkérdések 1) Definiálja a rendszeres hibát 2) Definiálja a véletlen hibát 3) Definiálja az abszolút hibát 4) Definiálja a relatív hibát 5) Hogyan lehet az abszolút-, és a
1 kérdés. Személyes kezdőlap Villamos Gelencsér Géza Simonyi teszt május 13. szombat Teszt feladatok 2017 Előzetes megtekintés
 Személyes kezdőlap Villamos Gelencsér Géza Simonyi teszt 2017. május 13. szombat Teszt feladatok 2017 Előzetes megtekintés Kezdés ideje 2017. május 9., kedd, 16:54 Állapot Befejezte Befejezés dátuma 2017.
Személyes kezdőlap Villamos Gelencsér Géza Simonyi teszt 2017. május 13. szombat Teszt feladatok 2017 Előzetes megtekintés Kezdés ideje 2017. május 9., kedd, 16:54 Állapot Befejezte Befejezés dátuma 2017.
Elektrotechnika. Dr. Hodossy László előadás
 Elektrotechnika 13 előadás Dr Hodossy László 2006 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 Szervo Lineáris Lineáris Lineáris Szervo Vezérlő és szabályozó rendszerekben pozícionálási célra alkalmazzák
Elektrotechnika 13 előadás Dr Hodossy László 2006 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 Szervo Lineáris Lineáris Lineáris Szervo Vezérlő és szabályozó rendszerekben pozícionálási célra alkalmazzák
(Az 1. példa adatai Uray-Szabó: Elektrotechnika c. (Nemzeti Tankönyvkiadó) könyvéből vannak.)
 könyvéből vannak.)") Egyenáramú gépek (Az 1. példa adatai Uray-Szabó: Elektrotechnika c. (Nemzeti Tankönyvkiadó) könyvéből vannak.) 1. Párhuzamos gerjesztésű egyenáramú motor 500 V kapocsfeszültségű, párhuzamos gerjesztésű
Egyenáramú gépek (Az 1. példa adatai Uray-Szabó: Elektrotechnika c. (Nemzeti Tankönyvkiadó) könyvéből vannak.) 1. Párhuzamos gerjesztésű egyenáramú motor 500 V kapocsfeszültségű, párhuzamos gerjesztésű
Használható segédeszköz: szabványok, táblázatok, gépkönyvek, számológép
 A 27/2012 (VIII. 27.) NGM rendelet (12/2013 (III.28) NGM rendelet által módosított) szakmai és vizsgakövetelménye alapján. Szakképesítés, azonosító száma és megnevezése 34 522 02 Elektromos gép- és készülékszerelő
A 27/2012 (VIII. 27.) NGM rendelet (12/2013 (III.28) NGM rendelet által módosított) szakmai és vizsgakövetelménye alapján. Szakképesítés, azonosító száma és megnevezése 34 522 02 Elektromos gép- és készülékszerelő
E-Laboratórium 2 A léptetőmotorok alkalmazásai Elméleti leírás
 E-Laboratórium 2 A léptetőmotorok alkalmazásai Elméleti leírás 1. Bevezető A szinkronmotorok csoportjában egy külön helyet a léptetőmotor foglal el, aminek a diszkrét működését, vagyis a léptetést, egy
E-Laboratórium 2 A léptetőmotorok alkalmazásai Elméleti leírás 1. Bevezető A szinkronmotorok csoportjában egy külön helyet a léptetőmotor foglal el, aminek a diszkrét működését, vagyis a léptetést, egy
EGYENÁRAMÚ GÉP VIZSGÁLATA Laboratóriumi mérési útmutató
 BUDAPESTI MÛSZAKI ÉS GAZDASÁGTUDOMÁNYI EGYETEM VILLAMOSMÉRNÖKI ÉS INFORMATIKAI KAR VILLAMOS ENERGETIKA TANSZÉK Villamos gépek és hajtások csoport EGYENÁRAMÚ GÉP VIZSGÁLATA Laboratóriumi mérési útmutató
BUDAPESTI MÛSZAKI ÉS GAZDASÁGTUDOMÁNYI EGYETEM VILLAMOSMÉRNÖKI ÉS INFORMATIKAI KAR VILLAMOS ENERGETIKA TANSZÉK Villamos gépek és hajtások csoport EGYENÁRAMÚ GÉP VIZSGÁLATA Laboratóriumi mérési útmutató
Az elektromos töltések eloszlása atomokban, molekulákban, ionokon belül és a vegyületekben. Vezetők, félvezetők és szigetelők molekuláris szerkezete.
 Szakképesítés: Log Autószerelő - 54 525 02 iszti Tantárgy: Elektrotechnikaelektronika Modul: 10416-12 Közlekedéstechnikai alapok Osztály: 11.a Évfolyam: 11. 36 hét, heti 2 óra, évi 72 óra Ok Dátum: 2013.09.21
Szakképesítés: Log Autószerelő - 54 525 02 iszti Tantárgy: Elektrotechnikaelektronika Modul: 10416-12 Közlekedéstechnikai alapok Osztály: 11.a Évfolyam: 11. 36 hét, heti 2 óra, évi 72 óra Ok Dátum: 2013.09.21
TARTALOMJEGYZÉK. Előszó 9
 TARTALOMJEGYZÉK 3 Előszó 9 1. Villamos alapfogalmak 11 1.1. A villamosság elő for d u lá s a é s je le n t ősége 12 1.1.1. Történeti áttekintés 12 1.1.2. A vil la mos ság tech ni kai, tár sa dal mi ha
TARTALOMJEGYZÉK 3 Előszó 9 1. Villamos alapfogalmak 11 1.1. A villamosság elő for d u lá s a é s je le n t ősége 12 1.1.1. Történeti áttekintés 12 1.1.2. A vil la mos ság tech ni kai, tár sa dal mi ha
Háromfázisú aszinkron motorok
 Háromfázisú aszinkron motorok 1. példa Egy háromfázisú, 20 kw teljesítményű, 6 pólusú, 400 V/50 Hz hálózatról üzemeltetett aszinkron motor fordulatszáma 950 1/min. Teljesítmény tényezője 0,88, az állórész
Háromfázisú aszinkron motorok 1. példa Egy háromfázisú, 20 kw teljesítményű, 6 pólusú, 400 V/50 Hz hálózatról üzemeltetett aszinkron motor fordulatszáma 950 1/min. Teljesítmény tényezője 0,88, az állórész
Egyenáramú gépek. Felépítés
 Egyenármú gépek Felépítés 1. Állórész koszorú 2. Főpólus 3. Segédpólus 4. Forgórész koszorú 5. Armtúr tekercselés 6. Pólus fluxus 7. Kompenzáló tekercselés 1 Állórész - Tömör vstest - Tömör vs pólus -
Egyenármú gépek Felépítés 1. Állórész koszorú 2. Főpólus 3. Segédpólus 4. Forgórész koszorú 5. Armtúr tekercselés 6. Pólus fluxus 7. Kompenzáló tekercselés 1 Állórész - Tömör vstest - Tömör vs pólus -
Elmozdulás mérés BELEON KRISZTIÁN BELEON KRISTIÁN - MÉRÉSELMÉLET - ELMOZDULÁSMÉRÉS 1
 Elmozdulás mérés BELEON KRISZTIÁN 2016.11.17. 2016.11.17. BELEON KRISTIÁN - MÉRÉSELMÉLET - ELMOZDULÁSMÉRÉS 1 Mérési eljárás szerint Rezisztív Induktív Kapacitív Optikai Mágneses 2016.11.17. BELEON KRISTIÁN
Elmozdulás mérés BELEON KRISZTIÁN 2016.11.17. 2016.11.17. BELEON KRISTIÁN - MÉRÉSELMÉLET - ELMOZDULÁSMÉRÉS 1 Mérési eljárás szerint Rezisztív Induktív Kapacitív Optikai Mágneses 2016.11.17. BELEON KRISTIÁN
Elektrotechnika. 11. előadás. Összeállította: Dr. Hodossy László
 11. előadás Összeállította: Dr. Hodossy László 1. Szerkezeti felépítés 2. Működés 3. Működés 4. Armatúra reakció 5. Armatúra reakció 6. Egyenáramú gépek osztályozása 7. Külső 8. Külső. 9. Soros. 10. Soros
11. előadás Összeállította: Dr. Hodossy László 1. Szerkezeti felépítés 2. Működés 3. Működés 4. Armatúra reakció 5. Armatúra reakció 6. Egyenáramú gépek osztályozása 7. Külső 8. Külső. 9. Soros. 10. Soros
4. /ÁK Adja meg a villamos áramkör passzív építő elemeit!
 Áramkörök 1. /ÁK Adja meg a mértékegységek lehetséges prefixumait (20db)! 2. /ÁK Értelmezze az ideális feszültség generátor fogalmát! 3. /ÁK Mit ért valóságos feszültség generátor alatt? 4. /ÁK Adja meg
Áramkörök 1. /ÁK Adja meg a mértékegységek lehetséges prefixumait (20db)! 2. /ÁK Értelmezze az ideális feszültség generátor fogalmát! 3. /ÁK Mit ért valóságos feszültség generátor alatt? 4. /ÁK Adja meg
VILLAMOS FORGÓGÉPEK. Forgó mozgás létesítése
 SZÉCHENYI ISTVÁN EGYETEM HTTP://UNI.SZE.HU VILLAMOS FORGÓGÉPEK Forgó mozgás létesítése Marcsa Dániel Villamos gépek és energetika 203/204 - őszi szemeszter Elektromechanikai átalakítás Villamos rendszer
SZÉCHENYI ISTVÁN EGYETEM HTTP://UNI.SZE.HU VILLAMOS FORGÓGÉPEK Forgó mozgás létesítése Marcsa Dániel Villamos gépek és energetika 203/204 - őszi szemeszter Elektromechanikai átalakítás Villamos rendszer
4. /ÁK Adja meg a villamos áramkör passzív építő elemeit!
 Áramkörök 1. /ÁK Adja meg a mértékegységek lehetséges prefixumait (20db)! 2. /ÁK Értelmezze az ideális feszültség generátor fogalmát! 3. /ÁK Mit ért valóságos feszültség generátor alatt? 4. /ÁK Adja meg
Áramkörök 1. /ÁK Adja meg a mértékegységek lehetséges prefixumait (20db)! 2. /ÁK Értelmezze az ideális feszültség generátor fogalmát! 3. /ÁK Mit ért valóságos feszültség generátor alatt? 4. /ÁK Adja meg
Számítási feladatok a 6. fejezethez
 Számítási feladatok a 6. fejezethez 1. Egy szinuszosan változó áram a polaritás váltás után 1 μs múlva éri el első maximumát. Mekkora az áram frekvenciája? 2. Egy áramkörben I = 0,5 A erősségű és 200 Hz
Számítási feladatok a 6. fejezethez 1. Egy szinuszosan változó áram a polaritás váltás után 1 μs múlva éri el első maximumát. Mekkora az áram frekvenciája? 2. Egy áramkörben I = 0,5 A erősségű és 200 Hz
Használható segédeszköz: szabványok, táblázatok, gépkönyvek, számológép
 A 27/2012 (VIII. 27.) NGM rendelet (12/2013 (III.28) NGM rendelet által módosított) szakmai és vizsgakövetelménye alapján. Szakképesítés, azonosító száma és megnevezése 34 522 02 Elektromos gép- és készülékszerelő
A 27/2012 (VIII. 27.) NGM rendelet (12/2013 (III.28) NGM rendelet által módosított) szakmai és vizsgakövetelménye alapján. Szakképesítés, azonosító száma és megnevezése 34 522 02 Elektromos gép- és készülékszerelő
Tételek Elektrotechnika és elektronika I tantárgy szóbeli részéhez 1 1. AZ ELEKTROSZTATIKA ALAPJAI AZ ELEKTROMOS TÖLTÉS FOGALMA 8 1.
 Tételek Elektrotechnika és elektronika I tantárgy szóbeli részéhez 1 1. AZ ELEKTROSZTATIKA ALAPJAI 8 1.1 AZ ELEKTROMOS TÖLTÉS FOGALMA 8 1.2 AZ ELEKTROMOS TÉR 9 1.3 COULOMB TÖRVÉNYE 10 1.4 AZ ELEKTROMOS
Tételek Elektrotechnika és elektronika I tantárgy szóbeli részéhez 1 1. AZ ELEKTROSZTATIKA ALAPJAI 8 1.1 AZ ELEKTROMOS TÖLTÉS FOGALMA 8 1.2 AZ ELEKTROMOS TÉR 9 1.3 COULOMB TÖRVÉNYE 10 1.4 AZ ELEKTROMOS
Elektromechanika. 4. mérés. Háromfázisú aszinkron motor vizsgálata. 1. Rajzolja fel és értelmezze az aszinkron gép helyettesítő kapcsolási vázlatát.
 Elektromechanika 4. mérés Háromfázisú aszinkron motor vizsgálata 1. Rajzolja fel és értelmezze az aszinkron gép helyettesítő kapcsolási vázlatát. U 1 az állórész fázisfeszültségének vektora; I 1 az állórész
Elektromechanika 4. mérés Háromfázisú aszinkron motor vizsgálata 1. Rajzolja fel és értelmezze az aszinkron gép helyettesítő kapcsolási vázlatát. U 1 az állórész fázisfeszültségének vektora; I 1 az állórész
Hajtástechnika. Villanymotorok. Egyenáramú motorok. Váltóáramú motorok
 Hajtástechnika Villanymotorok Egyenáramú motorok Váltóáramú motorok Soros gerjesztésű Párhuzamos gerjesztésű Külső gerjesztésű Vegyes gerjesztésű Állandó mágneses gerjesztésű Aszinkron motorok Szinkron
Hajtástechnika Villanymotorok Egyenáramú motorok Váltóáramú motorok Soros gerjesztésű Párhuzamos gerjesztésű Külső gerjesztésű Vegyes gerjesztésű Állandó mágneses gerjesztésű Aszinkron motorok Szinkron
Érzékelők és Működtetők I.
 Érzékelők és Működtetők I. A hosszmérés, elmozdulásmérés szenzorai 1. Potenciométeres átalakítók 2. Nyúlásmérő bélyeges átalakítók 3. Induktív átalakítók 4. Optoelektronikus átalakítók 5. Kapacitív átalakítók
Érzékelők és Működtetők I. A hosszmérés, elmozdulásmérés szenzorai 1. Potenciométeres átalakítók 2. Nyúlásmérő bélyeges átalakítók 3. Induktív átalakítók 4. Optoelektronikus átalakítók 5. Kapacitív átalakítók
Mérőátalakítók Összefoglaló táblázat a mérőátalakítókról
 Összefoglaló táblázat a mérőátalakítókról http://www.bmeeok.hu/bmeeok/uploaded/bmeeok_162_osszefoglalas.pdf A mérőátalakító a mérőberendezésnek az a része, amely a bemenő nem villamos mennyiséget villamos
Összefoglaló táblázat a mérőátalakítókról http://www.bmeeok.hu/bmeeok/uploaded/bmeeok_162_osszefoglalas.pdf A mérőátalakító a mérőberendezésnek az a része, amely a bemenő nem villamos mennyiséget villamos
2.) Fajlagos ellenállásuk nagysága alapján állítsd sorrendbe a következő fémeket! Kezd a legjobban vezető fémmel!
 Fajlagos ellenállásuk nagysága alapján állítsd sorrendbe a következő fémeket! Kezd a legjobban vezető fémmel!") 1.) Hány Coulomb töltést tartalmaz a 72 Ah ás akkumulátor? 2.) Fajlagos ellenállásuk nagysága alapján állítsd sorrendbe a következő fémeket! Kezd a legjobban vezető fémmel! a.) alumínium b.) ezüst c.)
1.) Hány Coulomb töltést tartalmaz a 72 Ah ás akkumulátor? 2.) Fajlagos ellenállásuk nagysága alapján állítsd sorrendbe a következő fémeket! Kezd a legjobban vezető fémmel! a.) alumínium b.) ezüst c.)
4. FEJEZET MOTORHAJTÁSOK
 Tantárgy: TELJESÍTMÉNYELEKTRONIKA Tanár: Dr. Burány Nándor Tanársegéd: Mr. Divéki Szabolcs 5. félév Óraszám: 2+2 1 4. FEJEZET MOTORHAJTÁSOK Széles skála: o W...MW, o precíz pozícionálás...goromba sebességvezérlés.
Tantárgy: TELJESÍTMÉNYELEKTRONIKA Tanár: Dr. Burány Nándor Tanársegéd: Mr. Divéki Szabolcs 5. félév Óraszám: 2+2 1 4. FEJEZET MOTORHAJTÁSOK Széles skála: o W...MW, o precíz pozícionálás...goromba sebességvezérlés.
Az aszinkron és a szinkron gépek külső mágnesének vasmagja, -amelyik általában az
 8 FORGÓMEZŐS GÉPEK. Az aszinkron és a szinkron géek külső mágnesének vasmagja, -amelyik általában az állórész,- hengergyűrű alakú. A D átmérőjű belső felületén tengelyirányban hornyokat mélyítenek, és
8 FORGÓMEZŐS GÉPEK. Az aszinkron és a szinkron géek külső mágnesének vasmagja, -amelyik általában az állórész,- hengergyűrű alakú. A D átmérőjű belső felületén tengelyirányban hornyokat mélyítenek, és
Számítási feladatok megoldással a 6. fejezethez
 Számítási feladatok megoldással a 6. fejezethez. Egy szinuszosan változó áram a polaritás váltás után μs múlva éri el első maximumát. Mekkora az áram frekvenciája? T = 4 t = 4 = 4ms 6 f = = =,5 Hz = 5
Számítási feladatok megoldással a 6. fejezethez. Egy szinuszosan változó áram a polaritás váltás után μs múlva éri el első maximumát. Mekkora az áram frekvenciája? T = 4 t = 4 = 4ms 6 f = = =,5 Hz = 5
TB6600 V1 Léptetőmotor vezérlő
 TB6600 V1 Léptetőmotor vezérlő Mikrolépés lehetősége: 1, 1/2, 1/4, 1/8, 1/16. A vezérlő egy motor meghajtására képes 0,5-4,5A között állítható motoráram Tápellátás: 12-45V közötti feszültséget igényel
TB6600 V1 Léptetőmotor vezérlő Mikrolépés lehetősége: 1, 1/2, 1/4, 1/8, 1/16. A vezérlő egy motor meghajtására képes 0,5-4,5A között állítható motoráram Tápellátás: 12-45V közötti feszültséget igényel
Mérésadatgyűjtés, jelfeldolgozás.
 Mérésadatgyűjtés, jelfeldolgozás. Nem villamos jelek mérésének folyamatai. Érzékelők, jelátalakítók felosztása. Passzív jelátalakítók. 1.Ellenállás változáson alapuló jelátalakítók -nyúlásmérő ellenállások
Mérésadatgyűjtés, jelfeldolgozás. Nem villamos jelek mérésének folyamatai. Érzékelők, jelátalakítók felosztása. Passzív jelátalakítók. 1.Ellenállás változáson alapuló jelátalakítók -nyúlásmérő ellenállások
Mérés és adatgyűjtés
 Mérés és adatgyűjtés 7. óra Mingesz Róbert Szegedi Tudományegyetem 2013. április 11. MA - 7. óra Verzió: 2.2 Utolsó frissítés: 2013. április 10. 1/37 Tartalom I 1 Szenzorok 2 Hőmérséklet mérése 3 Fény
Mérés és adatgyűjtés 7. óra Mingesz Róbert Szegedi Tudományegyetem 2013. április 11. MA - 7. óra Verzió: 2.2 Utolsó frissítés: 2013. április 10. 1/37 Tartalom I 1 Szenzorok 2 Hőmérséklet mérése 3 Fény
7. L = 100 mh és r s = 50 Ω tekercset 12 V-os egyenfeszültségű áramkörre kapcsolunk. Mennyi idő alatt éri el az áram az állandósult értékének 63 %-át?
 1. Jelöld H -val, ha hamis, I -vel ha igaz szerinted az állítás!...két elektromos töltés között fellépő erőhatás nagysága arányos a két töltés nagyságával....két elektromos töltés között fellépő erőhatás
1. Jelöld H -val, ha hamis, I -vel ha igaz szerinted az állítás!...két elektromos töltés között fellépő erőhatás nagysága arányos a két töltés nagyságával....két elektromos töltés között fellépő erőhatás
Használható segédeszköz: szabványok, táblázatok, gépkönyvek, számológép
 A 27/2012 (VIII. 27.) NGM rendelet (12/2013 (III.28) NGM rendelet által módosított) szakmai és vizsgakövetelménye alapján. Szakképesítés, azonosító száma és megnevezése 34 522 02 Elektromos gép- és készülékszerelő
A 27/2012 (VIII. 27.) NGM rendelet (12/2013 (III.28) NGM rendelet által módosított) szakmai és vizsgakövetelménye alapján. Szakképesítés, azonosító száma és megnevezése 34 522 02 Elektromos gép- és készülékszerelő
Oszcillátorok. Párhuzamos rezgőkör L C Miért rezeg a rezgőkör?
 Oszcillátorok Párhuzamos rezgőkör L C Miért rezeg a rezgőkör? Töltsük fel az ábrán látható kondenzátor egy megadott U feszültségre, majd zárjuk az áramkört az ábrán látható módon. Mind a tekercsen, mind
Oszcillátorok Párhuzamos rezgőkör L C Miért rezeg a rezgőkör? Töltsük fel az ábrán látható kondenzátor egy megadott U feszültségre, majd zárjuk az áramkört az ábrán látható módon. Mind a tekercsen, mind
Mechatronika, Optika és Gépészeti Informatika Tanszék MOTOR - BOARD
 echatronika, Optika és Gépészeti Informatika Tanszék OTOR - BORD I. Elméleti alapok a felkészüléshez 1. vizsgált berendezés mérést a HPS System Technik (www.hps-systemtechnik.com) rendszereszközök segítségével
echatronika, Optika és Gépészeti Informatika Tanszék OTOR - BORD I. Elméleti alapok a felkészüléshez 1. vizsgált berendezés mérést a HPS System Technik (www.hps-systemtechnik.com) rendszereszközök segítségével
Elektrotechnika 11/C Villamos áramkör Passzív és aktív hálózatok
 Elektrotechnika 11/C Villamos áramkör A villamos áramkör. A villamos áramkör részei. Ideális feszültségforrás. Fogyasztó. Vezeték. Villamos ellenállás. Ohm törvénye. Részfeszültségek és feszültségesés.
Elektrotechnika 11/C Villamos áramkör A villamos áramkör. A villamos áramkör részei. Ideális feszültségforrás. Fogyasztó. Vezeték. Villamos ellenállás. Ohm törvénye. Részfeszültségek és feszültségesés.
VÁLTAKOZÓ ÁRAMÚ KÖRÖK
 Számítsuk ki a 80 mh induktivitású ideális tekercs reaktanciáját az 50 Hz, 80 Hz, 300 Hz, 800 Hz, 1200 Hz és 1,6 khz frekvenciájú feszültséggel táplált hálózatban! Sorosan kapcsolt C = 700 nf, L=600 mh,
Számítsuk ki a 80 mh induktivitású ideális tekercs reaktanciáját az 50 Hz, 80 Hz, 300 Hz, 800 Hz, 1200 Hz és 1,6 khz frekvenciájú feszültséggel táplált hálózatban! Sorosan kapcsolt C = 700 nf, L=600 mh,
Elektrotechnika 9. évfolyam
 Elektrotechnika 9. évfolyam Villamos áramkörök A villamos áramkör. A villamos áramkör részei. Ideális feszültségforrás. Fogyasztó. Vezeték. Villamos ellenállás. Ohm törvénye. Részfeszültségek és feszültségesés.
Elektrotechnika 9. évfolyam Villamos áramkörök A villamos áramkör. A villamos áramkör részei. Ideális feszültségforrás. Fogyasztó. Vezeték. Villamos ellenállás. Ohm törvénye. Részfeszültségek és feszültségesés.
Zárt mágneskörű induktív átalakítók
 árt mágneskörű induktív átalakítók zárt mágneskörű átalakítók felépítésükből következően kis elmozdulások mérésére használhatók megfelelő érzékenységgel. zárt mágneskörű induktív átalakítók mágnesköre
árt mágneskörű induktív átalakítók zárt mágneskörű átalakítók felépítésükből következően kis elmozdulások mérésére használhatók megfelelő érzékenységgel. zárt mágneskörű induktív átalakítók mágnesköre
Orvosi jelfeldolgozás. Információ. Információtartalom. Jelek osztályozása De, mi az a jel?
 Orvosi jelfeldolgozás Információ De, mi az a jel? Jel: Információt szolgáltat (információ: új ismeretanyag, amely csökkenti a bizonytalanságot).. Megjelent.. Panasza? információ:. Egy beteg.. Fáj a fogam.
Orvosi jelfeldolgozás Információ De, mi az a jel? Jel: Információt szolgáltat (információ: új ismeretanyag, amely csökkenti a bizonytalanságot).. Megjelent.. Panasza? információ:. Egy beteg.. Fáj a fogam.
ELEKTROTECHNIKA-ELEKTRONIKA ELEKTROTECHNIKA
 ELEKTROTECHNIKA-ELEKTRONIKA ELEKTROTECHNIKA 1. Egyenáramú körök Követelmények, matematikai alapok, prefixumok Töltés, áramerősség Feszültség Ellenállás és vezetés. Vezetők, szigetelők Áramkör fogalma Áramköri
ELEKTROTECHNIKA-ELEKTRONIKA ELEKTROTECHNIKA 1. Egyenáramú körök Követelmények, matematikai alapok, prefixumok Töltés, áramerősség Feszültség Ellenállás és vezetés. Vezetők, szigetelők Áramkör fogalma Áramköri
1. ERŐMÉRÉS NYÚLÁSMÉRŐ BÉLYEG ALKALMAZÁSÁVAL
 1. ERŐMÉRÉS NYÚLÁSMÉRŐ BÉLYEG LKLMZÁSÁVL nyúlásmérő bélyegek mechanikai deformációt alakítanak át ellenállás-változássá. lkalmazásukkal úgy készítenek erőmérő cellát, hogy egy rugalmas alakváltozást szenvedő
1. ERŐMÉRÉS NYÚLÁSMÉRŐ BÉLYEG LKLMZÁSÁVL nyúlásmérő bélyegek mechanikai deformációt alakítanak át ellenállás-változássá. lkalmazásukkal úgy készítenek erőmérő cellát, hogy egy rugalmas alakváltozást szenvedő
S Z I N K R O N G É P E K
 VILLANYSZERELŐ KÉPZÉS 2 0 1 5 S Z I N K R O N G É P E K ÖSSZEÁLLÍTOTTA NAGY LÁSZLÓ MÉRNÖKTANÁR - 2 - Tartalomjegyzék Szinkrongépek működési elve...3 Szinkrongépek felépítése...3 Szinkrongenerátor üresjárási
VILLANYSZERELŐ KÉPZÉS 2 0 1 5 S Z I N K R O N G É P E K ÖSSZEÁLLÍTOTTA NAGY LÁSZLÓ MÉRNÖKTANÁR - 2 - Tartalomjegyzék Szinkrongépek működési elve...3 Szinkrongépek felépítése...3 Szinkrongenerátor üresjárási
A 27/2012 (VIII. 27.) NGM rendelet 29/2016 (VIII.26) NGM rendelet által módosított) szakmai és vizsgakövetelménye alapján.
 NGM rendelet 29/2016 (VIII.26) NGM rendelet által módosított) szakmai és vizsgakövetelménye alapján.") A 27/2012 (VIII. 27.) NGM rendelet 29/2016 (VIII.26) NGM rendelet által módosított) szakmai és vizsgakövetelménye alapján. Szakképesítés, azonosító száma és megnevezése 54 522 01 Erősáramú elektrotechnikus
A 27/2012 (VIII. 27.) NGM rendelet 29/2016 (VIII.26) NGM rendelet által módosított) szakmai és vizsgakövetelménye alapján. Szakképesítés, azonosító száma és megnevezése 54 522 01 Erősáramú elektrotechnikus
Váltakozóáramú gépek. Óbudai Egyetem Bánki Donát Gépész és Biztonságtechnikai Kar Mechatronikai és Autótechnikai Intézet
 Óbudai Egyetem Bánki Donát Gépész és Biztonságtechnikai Kar Mechatronikai és Autótechnikai Intézet Váltakozóáramú gépek Összeállította: Langer Ingrid adjunktus Aszinkron (indukciós) gép Az ipari berendezések
Óbudai Egyetem Bánki Donát Gépész és Biztonságtechnikai Kar Mechatronikai és Autótechnikai Intézet Váltakozóáramú gépek Összeállította: Langer Ingrid adjunktus Aszinkron (indukciós) gép Az ipari berendezések
HÁROMFÁZISÚ VÁLTAKOZÓ ÁRAM
 VILLANYSZERELŐ KÉPZÉS 2 0 1 5 HÁROMFÁZISÚ VÁLTAKOZÓ ÁRAM ÖSSZEÁLLÍTOTTA NAGY LÁSZLÓ MÉRNÖKTANÁR - 2 - Tartalomjegyzék Nem szimmetrikus többfázisú rendszerek...3 Háronfázisú hálózatok...3 Csillag kapcsolású
VILLANYSZERELŐ KÉPZÉS 2 0 1 5 HÁROMFÁZISÚ VÁLTAKOZÓ ÁRAM ÖSSZEÁLLÍTOTTA NAGY LÁSZLÓ MÉRNÖKTANÁR - 2 - Tartalomjegyzék Nem szimmetrikus többfázisú rendszerek...3 Háronfázisú hálózatok...3 Csillag kapcsolású
Hálózati egyenirányítók, feszültségsokszorozók Egyenirányító kapcsolások
 Hálózati egyenirányítók, feszültségsokszorozók Egyenirányító kapcsolások Egyenirányítás: egyenáramú komponenst nem tartalmazó jelből egyenáramú összetevő előállítása. Nemlineáris áramköri elemet tartalmazó
Hálózati egyenirányítók, feszültségsokszorozók Egyenirányító kapcsolások Egyenirányítás: egyenáramú komponenst nem tartalmazó jelből egyenáramú összetevő előállítása. Nemlineáris áramköri elemet tartalmazó
Jelenlét, pozíció, elmozdulás érzékelők
 Jelenlét, pozíció, elmozdulás érzékelők 1 A szenzorok néhány főbb típusa: Ellenállásos szenzorok, Kapacitív szenzorok, Elektromágneses szenzorok, Piezoelektromos szenzorok, Optoelektronikus szenzorok és
Jelenlét, pozíció, elmozdulás érzékelők 1 A szenzorok néhány főbb típusa: Ellenállásos szenzorok, Kapacitív szenzorok, Elektromágneses szenzorok, Piezoelektromos szenzorok, Optoelektronikus szenzorok és
= f p képlet szerint. A gép csak ezen a szögsebességen tud állandósult nyomatékot kifejteni.
 44 SZINKRON GÉPEK. Szögsebességük az állórész f 1 frekvenciájához mereven kötődik az ω 2 π = f p képlet szerint. A gép csak ezen a szögsebességen tud állandósult nyomatékot kifejteni. Az állórész felépítése
44 SZINKRON GÉPEK. Szögsebességük az állórész f 1 frekvenciájához mereven kötődik az ω 2 π = f p képlet szerint. A gép csak ezen a szögsebességen tud állandósult nyomatékot kifejteni. Az állórész felépítése
Transzformátor rezgés mérés. A BME Villamos Energetika Tanszéken
 Transzformátor rezgés mérés A BME Villamos Energetika Tanszéken A valóság egyszerűsítése, modellezés. A mérés tervszerűen végrehajtott tevékenység, ezért a bonyolult valóságos rendszert először egyszerűsítik.
Transzformátor rezgés mérés A BME Villamos Energetika Tanszéken A valóság egyszerűsítése, modellezés. A mérés tervszerűen végrehajtott tevékenység, ezért a bonyolult valóságos rendszert először egyszerűsítik.
Négypólusok helyettesítő kapcsolásai
 Transzformátorok Magyar találmány: Bláthy Ottó Titusz (1860-1939), Déry Miksa (1854-1938), Zipernovszky Károly (1853-1942), Ganz Villamossági Gyár, 1885. Felépítés, működés Transzformátor: négypólus. Működési
Transzformátorok Magyar találmány: Bláthy Ottó Titusz (1860-1939), Déry Miksa (1854-1938), Zipernovszky Károly (1853-1942), Ganz Villamossági Gyár, 1885. Felépítés, működés Transzformátor: négypólus. Működési
Gépészmérnöki alapszak, Mérnöki fizika 2. ZH, december 05. Feladatok (maximum 3x6 pont=18 pont)
") 1. 2. 3. Mondat E1 E2 NÉV: Gépészmérnöki alapszak, Mérnöki fizika 2. ZH, 2017. december 05. Neptun kód: Aláírás: g=10 m/s 2 ; ε 0 = 8.85 10 12 F/m; μ 0 = 4π 10 7 Vs/Am; c = 3 10 8 m/s Előadó: Márkus /
1. 2. 3. Mondat E1 E2 NÉV: Gépészmérnöki alapszak, Mérnöki fizika 2. ZH, 2017. december 05. Neptun kód: Aláírás: g=10 m/s 2 ; ε 0 = 8.85 10 12 F/m; μ 0 = 4π 10 7 Vs/Am; c = 3 10 8 m/s Előadó: Márkus /
Érzékelők és beavatkozók
 Érzékelők és beavatkozók DC motorok 3. rész egyetemi docens - 1 - DC motorvezérlés H-híd: +V r Motor mozgatás előre Motor mozgatás hátra Fékezés Szabadonfutás a vezérlés függvényében UL LL + Ø - UR LR
Érzékelők és beavatkozók DC motorok 3. rész egyetemi docens - 1 - DC motorvezérlés H-híd: +V r Motor mozgatás előre Motor mozgatás hátra Fékezés Szabadonfutás a vezérlés függvényében UL LL + Ø - UR LR
Elektrotechnika. Ballagi Áron
 Elektrotechnika Ballagi Áron Mágneses tér Elektrotechnika x/2 Mágneses indukció kísérlet Állandó mágneses térben helyezzünk el egy l hosszúságú vezetőt, és bocsássunk a vezetőbe I áramot! Tapasztalat:
Elektrotechnika Ballagi Áron Mágneses tér Elektrotechnika x/2 Mágneses indukció kísérlet Állandó mágneses térben helyezzünk el egy l hosszúságú vezetőt, és bocsássunk a vezetőbe I áramot! Tapasztalat:
Az önindukciós és kölcsönös indukciós tényező meghatározása Az Elektrotechnika tárgy 7. sz. laboratóriumi gyakorlatához Mérésvezetői segédlet
 Az önindukciós és kölcsönös indukciós tényező meghatározása Az Elektrotechnika tárgy 7. sz. laboratóriumi gyakorlatához Mérésvezetői segédlet A hallgatói útmutatóban vázolt program a csoport felkészültsége
Az önindukciós és kölcsönös indukciós tényező meghatározása Az Elektrotechnika tárgy 7. sz. laboratóriumi gyakorlatához Mérésvezetői segédlet A hallgatói útmutatóban vázolt program a csoport felkészültsége
33 522 04 1000 00 00 Villanyszerelő 4 Villanyszerelő 4
 A 10/2007 (II. 27.) SzMM rendelettel módosított 1/2006 (II. 17.) OM rendelet Országos Képzési Jegyzékről és az Országos Képzési Jegyzékbe történő felvétel és törlés eljárási rendjéről alapján. Szakképesítés,
A 10/2007 (II. 27.) SzMM rendelettel módosított 1/2006 (II. 17.) OM rendelet Országos Képzési Jegyzékről és az Országos Képzési Jegyzékbe történő felvétel és törlés eljárási rendjéről alapján. Szakképesítés,
Érzékelők és beavatkozók
 Érzékelők és beavatkozók Léptetőmotorok egyetemi docens - 1 - Léptetőmotorok A léptetőmotorok alapvető tulajdonságai: A forgórész diszkrét szöghelyzetekbe állítható be. Az adott szögpozícióban tartó nyomatékot
Érzékelők és beavatkozók Léptetőmotorok egyetemi docens - 1 - Léptetőmotorok A léptetőmotorok alapvető tulajdonságai: A forgórész diszkrét szöghelyzetekbe állítható be. Az adott szögpozícióban tartó nyomatékot
2.Előadás ( ) Munkapont és kivezérelhetőség
 Munkapont és kivezérelhetőség") 2.lőadás (207.09.2.) Munkapont és kivezérelhetőség A tranzisztorokat (BJT) lineáris áramkörbe ágyazva "működtetjük" és a továbbiakban mindig követelmény, hogy a tranzisztor normál aktív tartományban működjön
2.lőadás (207.09.2.) Munkapont és kivezérelhetőség A tranzisztorokat (BJT) lineáris áramkörbe ágyazva "működtetjük" és a továbbiakban mindig követelmény, hogy a tranzisztor normál aktív tartományban működjön
7. Laboratóriumi gyakorlat KIS ELMOZDULÁSOK MÉRÉSE KAPACITÍV ÉS INDUKTÍV MÓDSZERREL
 7. Laboratóriumi gyakorlat KIS ELMOZDULÁSOK MÉRÉSE KAPACITÍV ÉS INDUKTÍV MÓDSZERREL 1. A gyakorlat célja Kis elmozulások (.1mm 1cm) mérésének bemutatása egyszerű felépítésű érzékkőkkel. Kapacitív és inuktív
7. Laboratóriumi gyakorlat KIS ELMOZDULÁSOK MÉRÉSE KAPACITÍV ÉS INDUKTÍV MÓDSZERREL 1. A gyakorlat célja Kis elmozulások (.1mm 1cm) mérésének bemutatása egyszerű felépítésű érzékkőkkel. Kapacitív és inuktív
ÉRZÉKELŐK ÉS BEAVATKOZÓK II. 2. DC MOTOROK BEVEZETÉS ÉS STATIKUS MODELLEZÉS
 ÉRZÉKELŐK ÉS EVTKOZÓK II. 2. DC MOTOROK EVEZETÉS ÉS STTIKUS MODELLEZÉS Dr. Soumelidis lexandros 2019.02.13. ME KÖZLEKEDÉSMÉRNÖKI ÉS JÁRMŰMÉRNÖKI KR 32708-2/2017/INTFIN SZÁMÚ EMMI ÁLTL TÁMOGTOTT TNNYG Elektromos
ÉRZÉKELŐK ÉS EVTKOZÓK II. 2. DC MOTOROK EVEZETÉS ÉS STTIKUS MODELLEZÉS Dr. Soumelidis lexandros 2019.02.13. ME KÖZLEKEDÉSMÉRNÖKI ÉS JÁRMŰMÉRNÖKI KR 32708-2/2017/INTFIN SZÁMÚ EMMI ÁLTL TÁMOGTOTT TNNYG Elektromos
Mágneses erőtér. Ahol az áramtól átjárt vezetőre (vagy mágnestűre) erő hat. A villamos forgógépek mutatós műszerek működésének alapja
 erő hat. A villamos forgógépek mutatós műszerek működésének alapja") Mágneses erőtér Ahol az áramtól átjárt vezetőre (vagy mágnestűre) erő hat A villamos forgógépek mutatós műszerek működésének alapja Magnetosztatikai mező: nyugvó állandó mágnesek és egyenáramok időben
Mágneses erőtér Ahol az áramtól átjárt vezetőre (vagy mágnestűre) erő hat A villamos forgógépek mutatós műszerek működésének alapja Magnetosztatikai mező: nyugvó állandó mágnesek és egyenáramok időben
Összefüggő szakmai gyakorlat témakörei
 Összefüggő szakmai gyakorlat témakörei Villamosipar és elektronika ágazat Elektrotechnika gyakorlat 10. évfolyam 10 óra Sorszám Tananyag Óraszám Forrasztási gyakorlat 1 1.. 3.. Forrasztott kötés típusai:
Összefüggő szakmai gyakorlat témakörei Villamosipar és elektronika ágazat Elektrotechnika gyakorlat 10. évfolyam 10 óra Sorszám Tananyag Óraszám Forrasztási gyakorlat 1 1.. 3.. Forrasztott kötés típusai:
Villamosságtan szigorlati tételek
 Villamosságtan szigorlati tételek 1.1. Egyenáramú hálózatok alaptörvényei 1.2. Lineáris egyenáramú hálózatok elemi számítása 1.3. Nemlineáris egyenáramú hálózatok elemi számítása 1.4. Egyenáramú hálózatok
Villamosságtan szigorlati tételek 1.1. Egyenáramú hálózatok alaptörvényei 1.2. Lineáris egyenáramú hálózatok elemi számítása 1.3. Nemlineáris egyenáramú hálózatok elemi számítása 1.4. Egyenáramú hálózatok
ÜZLETKÖTŐI ÉRTEKEZLET 2012-01-13 DUNAKESZI
 ÜZLETKÖTŐI ÉRTEKEZLET 2012-01-13 DUNAKESZI ÉS MOTORVÉDŐ KAPCSOLÓK KONTAKTOROK Kontaktor definíció: Olyan gyakori működésre alkalmas elektromágneses elven működtetett mechanikus kapcsolókészülék,
ÜZLETKÖTŐI ÉRTEKEZLET 2012-01-13 DUNAKESZI ÉS MOTORVÉDŐ KAPCSOLÓK KONTAKTOROK Kontaktor definíció: Olyan gyakori működésre alkalmas elektromágneses elven működtetett mechanikus kapcsolókészülék,
SZÉCHENYI ISTVÁN EGYETEM HTTP://UNI.SZE.HU AUTOMATIZÁLÁSI TANSZÉK HTTP://AUTOMATIZALAS.SZE.HU SZINKRON GÉPEK
 SZÉCHENYI ISTVÁN EGYETEM HTTP://UNI.SZE.HU SZINKRON GÉPEK 2013/2014 - őszi szemeszter Szinkron gép Szinkron gép Szinkron gép motor Szinkron gép állandó mágneses motor Szinkron generátor - energiatermelés
SZÉCHENYI ISTVÁN EGYETEM HTTP://UNI.SZE.HU SZINKRON GÉPEK 2013/2014 - őszi szemeszter Szinkron gép Szinkron gép Szinkron gép motor Szinkron gép állandó mágneses motor Szinkron generátor - energiatermelés
FIZIKA. Váltóáramú hálózatok, elektromágneses hullámok
 Váltóáramú hálózatok, elektromágneses Váltóáramú hálózatok Maxwell egyenletek Elektromágneses Váltófeszültség (t) = B A w sinwt = sinwt maximális feszültség w= pf körfrekvencia 4 3 - - -3-4,5,,5,,5,3,35
Váltóáramú hálózatok, elektromágneses Váltóáramú hálózatok Maxwell egyenletek Elektromágneses Váltófeszültség (t) = B A w sinwt = sinwt maximális feszültség w= pf körfrekvencia 4 3 - - -3-4,5,,5,,5,3,35
11-12. évfolyam. A tantárgy megnevezése: elektrotechnika. Évi óraszám: 69. Tanítási hetek száma: 37 + 32. Tanítási órák száma: 1 óra/hét
 ELEKTROTECHNIKA (VÁLASZTHATÓ) TANTÁRGY 11-12. évfolyam A tantárgy megnevezése: elektrotechnika Évi óraszám: 69 Tanítási hetek száma: 37 + 32 Tanítási órák száma: 1 óra/hét A képzés célja: Választható tantárgyként
ELEKTROTECHNIKA (VÁLASZTHATÓ) TANTÁRGY 11-12. évfolyam A tantárgy megnevezése: elektrotechnika Évi óraszám: 69 Tanítási hetek száma: 37 + 32 Tanítási órák száma: 1 óra/hét A képzés célja: Választható tantárgyként
A 27/2012 (VIII. 27.) NGM rendelet (12/2013 (III.28) NGM rendelet által módosított) szakmai és vizsgakövetelménye alapján.
 NGM rendelet (12/2013 (III.28) NGM rendelet által módosított) szakmai és vizsgakövetelménye alapján.") A 27/2012 (VIII. 27.) NGM rendelet (12/2013 (III.28) NGM rendelet által módosított) szakmai és vizsgakövetelménye alapján. Szakképesítés, azonosító száma és megnevezése 54 522 01 Erősáramú elektrotechnikus
A 27/2012 (VIII. 27.) NGM rendelet (12/2013 (III.28) NGM rendelet által módosított) szakmai és vizsgakövetelménye alapján. Szakképesítés, azonosító száma és megnevezése 54 522 01 Erősáramú elektrotechnikus
Motortechnológiák és különböző motortechnológiákhoz illeszthető frekvenciaváltók
 Motortechnológiák és különböző motortechnológiákhoz illeszthető frekvenciaváltók Elektronikus akadémia 2017, Zajácz János 1 Danfoss Drives drives.danfoss.hu Az aktuális kérdés: Hatékonyság Miért? Mivel?
Motortechnológiák és különböző motortechnológiákhoz illeszthető frekvenciaváltók Elektronikus akadémia 2017, Zajácz János 1 Danfoss Drives drives.danfoss.hu Az aktuális kérdés: Hatékonyság Miért? Mivel?
EGYENÁRAMÚ TÁPEGYSÉGEK
 dátum:... a mérést végezte:... EGYENÁRAMÚ TÁPEGYSÉGEK m é r é s i j e g y z k ö n y v 1/A. Mérje meg az adott hálózati szabályozható (toroid) transzformátor szekunder tekercsének minimálisan és maximálisan
dátum:... a mérést végezte:... EGYENÁRAMÚ TÁPEGYSÉGEK m é r é s i j e g y z k ö n y v 1/A. Mérje meg az adott hálózati szabályozható (toroid) transzformátor szekunder tekercsének minimálisan és maximálisan
Váltakozóáramú gépek. Óbudai Egyetem Bánki Donát Gépész és Biztonságtechnikai Kar Mechatronikai és Autótechnikai Intézet
 Óbudai Egyetem Bánki Donát Gépész és Biztonságtechnikai Kar Mechatronikai és Autótechnikai Intézet Váltakozóáramú gépek Összeállította: Langer Ingrid adjunktus Aszinkron (indukciós) gép Az ipari berendezések
Óbudai Egyetem Bánki Donát Gépész és Biztonságtechnikai Kar Mechatronikai és Autótechnikai Intézet Váltakozóáramú gépek Összeállította: Langer Ingrid adjunktus Aszinkron (indukciós) gép Az ipari berendezések
Használható segédeszköz: szabványok, táblázatok, gépkönyvek, számológép
 A 27/2012 (VIII. 27.) NGM rendelet (12/2013 (III.28) NGM rendelet által módosított) szakmai és vizsgakövetelménye alapján. Szakképesítés, azonosító száma és megnevezése 34 522 02 Elektromos gép- és készülékszerelő
A 27/2012 (VIII. 27.) NGM rendelet (12/2013 (III.28) NGM rendelet által módosított) szakmai és vizsgakövetelménye alapján. Szakképesítés, azonosító száma és megnevezése 34 522 02 Elektromos gép- és készülékszerelő
LI 2 W = Induktív tekercsek és transzformátorok
 Induktív tekercsek és transzformátorok A tekercsek olyan elektronikai alkatrészek, amelyek mágneses terükben jelentős elektromos energiát képesek felhalmozni. A mágneses tér a tekercset alkotó vezetéken
Induktív tekercsek és transzformátorok A tekercsek olyan elektronikai alkatrészek, amelyek mágneses terükben jelentős elektromos energiát képesek felhalmozni. A mágneses tér a tekercset alkotó vezetéken
2. Mágneskapcsolók: NC1-es sorozat
 2. Mágneskapcsolók: NC1-es sorozat Alkalmazási terület: A mágneskapcsolót egyen- vagy váltakozó feszültséggel vezérelve kapcsolhatunk max. 6VAC névleges feszültségű és 95A névleges áramú áramkört. A készülék
2. Mágneskapcsolók: NC1-es sorozat Alkalmazási terület: A mágneskapcsolót egyen- vagy váltakozó feszültséggel vezérelve kapcsolhatunk max. 6VAC névleges feszültségű és 95A névleges áramú áramkört. A készülék
MÉRÉSI GYAKORLATOK (ELEKTROTECHNIKA) 10. évfolyam (10.a, b, c)
 10. évfolyam (10.a, b, c)") MÉRÉSI GYAKORLATOK (ELEKTROTECHNIKA) 10. évfolyam (10.a, b, c) 1. - Mérőtermi szabályzat, a mérések rendje - Balesetvédelem - Tűzvédelem - A villamos áram élettani hatásai - Áramütés elleni védelem - Szigetelési
MÉRÉSI GYAKORLATOK (ELEKTROTECHNIKA) 10. évfolyam (10.a, b, c) 1. - Mérőtermi szabályzat, a mérések rendje - Balesetvédelem - Tűzvédelem - A villamos áram élettani hatásai - Áramütés elleni védelem - Szigetelési
Hiszterézis: Egy rendszer kimenete nem csak az aktuális állapottól függ, hanem az állapotváltozás aktuális irányától is.
 1. Mi az érzékelő? Definiálja a típusait (belső/külső). Mit jelent a hiszterézis? Miért nem tudunk közvetlenül mérni, miért származtatunk? Hogyan kapcsolódik össze az érzékelés és a becslés a mérések során?
1. Mi az érzékelő? Definiálja a típusait (belső/külső). Mit jelent a hiszterézis? Miért nem tudunk közvetlenül mérni, miért származtatunk? Hogyan kapcsolódik össze az érzékelés és a becslés a mérések során?
Villamos gépek. Villamos forgógépek. Forgógépek elvi felépítése
 Villamos forgógépek Forgógépek elvi felépítése A villamos forgógépek két fő része: az álló- és a forgórész. Az állórészen elhelyezett tekercsek árama mágneses teret létesít. Ez a mágneses tér a mozgási
Villamos forgógépek Forgógépek elvi felépítése A villamos forgógépek két fő része: az álló- és a forgórész. Az állórészen elhelyezett tekercsek árama mágneses teret létesít. Ez a mágneses tér a mozgási
A II. kategória Fizika OKTV mérési feladatainak megoldása
 Nyomaték (x 0 Nm) O k t a t á si Hivatal A II. kategória Fizika OKTV mérési feladatainak megoldása./ A mágnes-gyűrűket a feladatban meghatározott sorrendbe és helyre rögzítve az alábbi táblázatban feltüntetett
Nyomaték (x 0 Nm) O k t a t á si Hivatal A II. kategória Fizika OKTV mérési feladatainak megoldása./ A mágnes-gyűrűket a feladatban meghatározott sorrendbe és helyre rögzítve az alábbi táblázatban feltüntetett
VI. fejezet. Az alapvető elektromechanikai átalakítók működési elvei
 VI. fejezet Az alapvető elektromechanikai átalakítók működési elvei Aszinkron gépek Gépfajták származtatása #: ω r =var Az ún. indukciós gépek forgórészében indukált feszültségek által létrehozott rotoráramok
VI. fejezet Az alapvető elektromechanikai átalakítók működési elvei Aszinkron gépek Gépfajták származtatása #: ω r =var Az ún. indukciós gépek forgórészében indukált feszültségek által létrehozott rotoráramok
Legutolsó frissítés ZÁRÓVIZSGA KÉRDÉSEK a VÁLOGATOTT FEJEZETEK AZ ELEKTROTECHNIKÁBAN CÍMŰ MSc TÁRGYBÓL
 Legutolsó frissítés 2013.05.24. Tárgykód: BMEVIAUM012 ZÁRÓVIZSGA KÉRDÉSEK a VÁLOGATOTT FEJEZETEK AZ ELEKTROTECHNIKÁBAN CÍMŰ MSc TÁRGYBÓL Fontos megjegyzés: a felkészüléshez ajánljuk a www.get.bme.hu hálózati
Legutolsó frissítés 2013.05.24. Tárgykód: BMEVIAUM012 ZÁRÓVIZSGA KÉRDÉSEK a VÁLOGATOTT FEJEZETEK AZ ELEKTROTECHNIKÁBAN CÍMŰ MSc TÁRGYBÓL Fontos megjegyzés: a felkészüléshez ajánljuk a www.get.bme.hu hálózati
Áramköri elemek. 1 Ábra: Az ellenállások egyezményes jele
 Áramköri elemek Az elektronikai áramkörök áramköri elemekből épülnek fel. Az áramköri elemeket két osztályba sorolhatjuk: aktív áramköri elemek: T passzív áramköri elemek: R, C, L Aktív áramköri elemek
Áramköri elemek Az elektronikai áramkörök áramköri elemekből épülnek fel. Az áramköri elemeket két osztályba sorolhatjuk: aktív áramköri elemek: T passzív áramköri elemek: R, C, L Aktív áramköri elemek
ALAPFOGALMIKÉRDÉSEK VILLAMOSSÁGTANBÓL 1. EGYENÁRAM
 ALAPFOGALMIKÉRDÉSEK VILLAMOSSÁGTANBÓL INFORMATIKUS HALLGATÓK RÉSZÉRE 1. EGYENÁRAM 1. Vezesse le a feszültségosztó képletet két ellenállás (R 1 és R 2 ) esetén! Az összefüggésben szerepl mennyiségek jelölését
ALAPFOGALMIKÉRDÉSEK VILLAMOSSÁGTANBÓL INFORMATIKUS HALLGATÓK RÉSZÉRE 1. EGYENÁRAM 1. Vezesse le a feszültségosztó képletet két ellenállás (R 1 és R 2 ) esetén! Az összefüggésben szerepl mennyiségek jelölését
Elektromechanikai rendszerek szimulációja
 Kandó Polytechnic of Technology Institute of Informatics Kóré László Elektromechanikai rendszerek szimulációja I Budapest 1997 Tartalom 1.MINTAPÉLDÁK...2 1.1 IDEÁLIS EGYENÁRAMÚ MOTOR FESZÜLTSÉG-SZÖGSEBESSÉG
Kandó Polytechnic of Technology Institute of Informatics Kóré László Elektromechanikai rendszerek szimulációja I Budapest 1997 Tartalom 1.MINTAPÉLDÁK...2 1.1 IDEÁLIS EGYENÁRAMÚ MOTOR FESZÜLTSÉG-SZÖGSEBESSÉG
Elektromos áramerősség
 Elektromos áramerősség Két különböző potenciálon lévő fémet vezetővel összekötve töltések áramlanak amíg a potenciál ki nem egyenlítődik. Az elektromos áram iránya a pozitív töltéshordozók áramlási iránya.
Elektromos áramerősség Két különböző potenciálon lévő fémet vezetővel összekötve töltések áramlanak amíg a potenciál ki nem egyenlítődik. Az elektromos áram iránya a pozitív töltéshordozók áramlási iránya.
= Φ B(t = t) Φ B (t = 0) t
 Φ B (t = 0) t") 4. Gyakorlat 32B-3 Egy ellenállású, r sugarú köralakú huzalhurok a B homogén mágneses erőtér irányára merőleges felületen fekszik. A hurkot gyorsan, t idő alatt 180 o -kal átforditjuk. Számitsuk ki, hogy
4. Gyakorlat 32B-3 Egy ellenállású, r sugarú köralakú huzalhurok a B homogén mágneses erőtér irányára merőleges felületen fekszik. A hurkot gyorsan, t idő alatt 180 o -kal átforditjuk. Számitsuk ki, hogy
MÁGNESES INDUKCIÓ VÁLTÓÁRAM VÁLTÓÁRAMÚ HÁLÓZATOK
 MÁGNESES NDUKCÓ VÁLTÓÁRAM VÁLTÓÁRAMÚ HÁLÓZATOK Mágneses indukció Mozgási indukció v B Vezetőt elmozdítunk mágneses térben B-re merőlegesen, akkor a vezetőben áram keletkezik, melynek iránya az őt létrehozó
MÁGNESES NDUKCÓ VÁLTÓÁRAM VÁLTÓÁRAMÚ HÁLÓZATOK Mágneses indukció Mozgási indukció v B Vezetőt elmozdítunk mágneses térben B-re merőlegesen, akkor a vezetőben áram keletkezik, melynek iránya az őt létrehozó
Mérés és adatgyűjtés
 Mérés és adatgyűjtés 4. óra - levelező Mingesz Róbert Szegedi Tudományegyetem 2011. március 18. MA lev - 4. óra Verzió: 1.3 Utolsó frissítés: 2011. május 15. 1/51 Tartalom I 1 A/D konverterek alkalmazása
Mérés és adatgyűjtés 4. óra - levelező Mingesz Róbert Szegedi Tudományegyetem 2011. március 18. MA lev - 4. óra Verzió: 1.3 Utolsó frissítés: 2011. május 15. 1/51 Tartalom I 1 A/D konverterek alkalmazása
ÁRAMKÖRÖK SZIMULÁCIÓJA
 ÁRAMKÖRÖK SZIMULÁCIÓJA Az áramkörök szimulációja révén betekintést nyerünk azok működésébe. Meg tudjuk határozni az áramkörök válaszát különböző gerjesztésekre, különböző üzemmódokra. Végezhetők analóg
ÁRAMKÖRÖK SZIMULÁCIÓJA Az áramkörök szimulációja révén betekintést nyerünk azok működésébe. Meg tudjuk határozni az áramkörök válaszát különböző gerjesztésekre, különböző üzemmódokra. Végezhetők analóg
Az elektromágneses indukció jelensége
 Az elektromágneses indukció jelensége Korábban láttuk, hogy az elektromos áram hatására mágneses tér keletkezik (Ampère-féle gerjesztési törvény) Kérdés, hogy vajon ez megfordítható-e, és a mágneses tér
Az elektromágneses indukció jelensége Korábban láttuk, hogy az elektromos áram hatására mágneses tér keletkezik (Ampère-féle gerjesztési törvény) Kérdés, hogy vajon ez megfordítható-e, és a mágneses tér
ikerfém kapcsoló Eloadás Iváncsy Tamás termisztor â Közvetett védelem: áramvédelem
 â Közvetlen motorvédelem: hovédelem ikerfém kapcsoló kis teljesítményen: közvetlenül kapcsolja a motort nagy teljesítményen: kivezetéssel muködteti a 3 fázisú kapcsolót Iváncsy Tamás termisztor â Közvetett
â Közvetlen motorvédelem: hovédelem ikerfém kapcsoló kis teljesítményen: közvetlenül kapcsolja a motort nagy teljesítményen: kivezetéssel muködteti a 3 fázisú kapcsolót Iváncsy Tamás termisztor â Közvetett
Villamos gépek tantárgy tételei
 10. tétel Milyen mérési feladatokat kell elvégeznie a kördiagram megszerkesztéséhez? Rajzolja meg a kördiagram felhasználásával a teljes nyomatéki függvényt! Az aszinkron gép egyszerűsített kördiagramja
10. tétel Milyen mérési feladatokat kell elvégeznie a kördiagram megszerkesztéséhez? Rajzolja meg a kördiagram felhasználásával a teljes nyomatéki függvényt! Az aszinkron gép egyszerűsített kördiagramja
Elektromechanika. 6. mérés. Teljesítményelektronika
 Elektromechanika 6. mérés Teljesítményelektronika 1. Rajzolja fel az ideális és a valódi dióda feszültségáram jelleggörbéjét! Valódi dióda karakterisztikája: Ideális dióda karakterisztikája (3-as jelű
Elektromechanika 6. mérés Teljesítményelektronika 1. Rajzolja fel az ideális és a valódi dióda feszültségáram jelleggörbéjét! Valódi dióda karakterisztikája: Ideális dióda karakterisztikája (3-as jelű
VILLAMOS ENERGETIKA VIZSGA DOLGOZAT - A csoport
 VILLAMOS ENERGETIKA VIZSGA DOLGOZAT - A csoport MEGOLDÁS 2013. június 3. 1.1. Mekkora áramot (I w, I m ) vesz fel az a fogyasztó, amelynek adatai: U n = 0,4 kv (vonali), S n = 0,6 MVA (3 fázisú), cosφ
VILLAMOS ENERGETIKA VIZSGA DOLGOZAT - A csoport MEGOLDÁS 2013. június 3. 1.1. Mekkora áramot (I w, I m ) vesz fel az a fogyasztó, amelynek adatai: U n = 0,4 kv (vonali), S n = 0,6 MVA (3 fázisú), cosφ
TANULÁSI ÚTMUTATÓ. Villanymotorok a gyakorlatban. Készítette: Mozsolics András
 TANULÁSI ÚTMUTATÓ Villanymotorok a gyakorlatban Készítette: Mozsolics András A fejlesztő intézmény megnevezése: Bánki Donát Térségi Integrált Szakképző Központ Kht. Székhelye: 2800 Tatabánya, Réti út 1-5.
TANULÁSI ÚTMUTATÓ Villanymotorok a gyakorlatban Készítette: Mozsolics András A fejlesztő intézmény megnevezése: Bánki Donát Térségi Integrált Szakképző Központ Kht. Székhelye: 2800 Tatabánya, Réti út 1-5.
Elektromágnesség tesztek
 Elektromágnesség tesztek 1. Melyik esetben nem tapasztalunk vonzóerőt? a) A mágnesrúd északi pólusához vasdarabot közelítünk. b) A mágnesrúd közepéhez vasdarabot közelítünk. c) A mágnesrúd déli pólusához
Elektromágnesség tesztek 1. Melyik esetben nem tapasztalunk vonzóerőt? a) A mágnesrúd északi pólusához vasdarabot közelítünk. b) A mágnesrúd közepéhez vasdarabot közelítünk. c) A mágnesrúd déli pólusához
Tekercsek. Induktivitás Tekercs: induktivitást megvalósító áramköri elem. Az induktivitás definíciója: Innen:
 Tekercsek Induktivitás Tekercs: induktivitást megvalósító áramköri elem. Az induktivitás definíciója: u i =-N dφ/dt=-n dφ/di di/dt=-l di/dt Innen: L=N dφ/di Ezt integrálva: L=N Φ/I A tekercs induktivitása
Tekercsek Induktivitás Tekercs: induktivitást megvalósító áramköri elem. Az induktivitás definíciója: u i =-N dφ/dt=-n dφ/di di/dt=-l di/dt Innen: L=N dφ/di Ezt integrálva: L=N Φ/I A tekercs induktivitása
EGYFÁZISÚ VÁLTAKOZÓ ÁRAM
 VANYSEEŐ KÉPÉS 0 5 EGYFÁSÚ VÁTAKOÓ ÁAM ÖSSEÁÍTOTTA NAGY ÁSÓ MÉNÖKTANÁ - - Tartalomjegyzék Váltakozó áram fogalma és jellemzői...3 Szinuszos lefolyású váltakozó feszültség előállítása...3 A szinuszos lefolyású
VANYSEEŐ KÉPÉS 0 5 EGYFÁSÚ VÁTAKOÓ ÁAM ÖSSEÁÍTOTTA NAGY ÁSÓ MÉNÖKTANÁ - - Tartalomjegyzék Váltakozó áram fogalma és jellemzői...3 Szinuszos lefolyású váltakozó feszültség előállítása...3 A szinuszos lefolyású